Способ расчета тока возбуждения исполнительного устройства - RU2384435C2
Код документа: RU2384435C2
Чертежи





Описание
Изобретение относится к способу расчета тока возбуждения, по меньшей мере, одного электрически возбуждаемого исполнительного устройства, например электромагнитного клапана, для регулирования зависимого от перепада давлений потока G (ΔР, I, KG) текучей среды согласно ограничительной части п.1 формулы. Кроме того, изобретение относится к способу калибровки или механической регулировки исполнительного устройства, а также к исполнительному устройству согласно ограничительной части п.11.
Дополнительно изобретение описывает способ измерения давления потока согласно ограничительной части п.20.
Известно, что в устройствах управления тормозными системами с аналоговым регулятором, а также в так называемых регуляторах динамики движения с дополнительными функциями, например с электрофильтром и т.д., устанавливают клапаны с аналоговым регулированием, возбуждаемые от электромагнита, для лучшей регулировки или снижения шума.
В новых поколениях устройств с гидравлической системой регулировки применяют так называемые аналоговые клапаны переключения. Аналоговый клапан переключения представляет собой токоуправляемый электромагнитный клапан, который рассчитан на полное отпирание или запирание, однако благодаря целевому регулированию тока действует так, что обладает аналоговыми характеристиками регулирования.
Способ распознавания точки переключения используемого аналогового клапана переключения, в частности для определения соотношения давлений по кривой прохождения тока, возбуждающего клапан, описан в EP 0813481 B1 (Р 7565).
Поэтому в принципе можно регулировать градиент давления или поток G соответствующего аналогового клапана переключения в зависимости от перепада давлений путем изменения тока с помощью электромагнитной катушки клапана. Объемный ток Q, правда, трудно отрегулировать в зоне регулирования, он зависит, кроме прочего, от перепада давлений Δp и от тока I, проходящего через электромагнитную катушку клапана. Конечно, эту зависимость непросто устранить в однажды заданной характеристике, так как уже незначительные, обусловленные изготовлением допуски конструктивных элементов клапана оказывают большое влияние на функциональную взаимосвязь между потоком и током возбуждения. Поэтому во время изготовления клапанов нужно определять характеристику для каждого клапана в отдельности и записывать ее в электронную память устройства управления. Однако для составления индивидуальных характеристик необходим дорогостоящий способ измерения с оказанием определенного давления устройств управления у поставщика или у производителя автомобилей. Характеристики, полученные дорогостоящим способом измерения, можно использовать затем, как это описано, например, в WO 01/98124 A1 (Р 9896), для установки желаемого градиента давления.
В заявке DE 10321783.5 (Р 10697) описан обучающий способ калибровки для характеристик аналоговых клапанов или клапанов переключения с аналоговым регулированием. Согласно этому способу проводят калибровку гидравлических клапанов во время работы тормозного устройства с аналоговым регулятором, при этом получают параметры регулирования или соответствующие корректировочные значения для корректировки уже существующей настроенной характеристики. Для такого способа характерно то, что он растягивается на несколько циклов регулирования защиты от блокировки. В каждом подходящем цикле собирают необходимые данные о времени восстановления давления и с помощью параметров, полученных из фактического цикла по рекуррентной формуле, влияют на повышение кривой. Этот способ служит для улучшения уже существующей настроенной характеристики и поэтому предполагает уже имеющуюся характеристику.
С помощью описанного выше способа либо недостаточно точно определяют параметры или характеристики, либо их можно определить только с помощью дорогостоящего способа измерения, который должен выполнить поставщик или производитель. Только таким образом можно определить индивидуальные, зависящие от изготовления и влияющие на характеристику давления параметры КGинд клапана, которые можно получить, например, из измеренных значений.
Целью изобретения является, таким образом, создание способа для определения характеристик, характеристических кривых и параметров клапана, с помощью которого обеспечивается более точное регулирование описанного далее электромагнитного клапана при отсутствии необходимости выполнения индивидуальной дорогостоящей калибровки при изготовлении или на конечном этапе изготовления.
Эта задача решается при помощи способа согласно п.1 формулы изобретения.
Под термином «исполнительные устройства» подразумеваются клапаны и затворы для управления текучей средой. В отношении применяемого исполнительного устройства речь идет предпочтительно о клапане. В отношении текучей среды речь идет также - помимо воздуха - о подходящей гидравлической жидкости, которая в случае с тормозной системой является обычной тормозной жидкостью.
Исполнительное устройство находится предпочтительно в полностью открытом или полностью закрытом положении. В зависимости от типа исполнительного устройства, обесточенного и открытого или обесточенного и закрытого, клапан занимает одно из этих положений под воздействием возвратного элемента. Подходящим возвратным элементом может быть предпочтительно пружина, которая имеет определенную характеристику силы/пути, которую можно привести в соответствие при помощи уравнения прямой.
Согласно изобретению способ применяют предпочтительно в электрогидравлическом устройстве для регулировки тормозной системы автомобиля.
Согласно изобретению способ применяется предпочтительно также для установки или регулировки градиентов давления исполнительного устройства.
Согласно заявленному способу требуемые для калибровки характеристики, или параметры, или характеристические величины получают без оказания давления на исполнительное устройство. Поэтому для определения характеристик или параметров можно отказаться от специального применения давления пневматического или гидравлического измерительного устройства. Изобретение относится, таким образом, в частности, к способу определения особо точных характеристик или параметров исполнительного устройства во время работы автомобиля, который оснащен тормозной системой, имеющей, в частности, регулировочные клапаны для регулирования тормозного давления.
Заявленный способ выгоден, кроме прочего, тем, что изготовленное исполнительное устройство или всю гидравлическую систему не нужно индивидуально измерять на испытательном стенде, оказывая определенное давление, как это требовалось до сих пор. Согласно заявленному способу достаточно подключить к исполнительному устройству или гидравлической системе электронное устройство управления, которое замеряет электромеханические или электромагнитные характеристики. Эти характеристики являются, в частности, по существу индивидуальными электромагнитными и механическими характеристиками КGинд исполнительного устройства, которые отвечают по существу за обусловленный изготовлением разброс в характеристиках. Характеристики исполнительного устройства, обладающие в результате изготовления меньшим разбросом, можно определить при помощи общих параметров КGобщ для целого конструктивного ряда таких устройств и долго хранить в памяти электронного устройства управления. Из характеристик можно затем рассчитать параметры исполнительного устройства и тем самым необходимый и зависящий от перепада давлений ток возбуждения исполнительного устройства.
Заявленный способ выгоден тем, что его можно реализовывать самостоятельно как угодно часто, в частности через регулярные промежутки времени в зависимости от конструкции автомобиля, что и делается согласно изобретению. Благодаря этому можно заново откалибровать систему через регулярные промежутки времени. Таким образом, можно учитывать возможные изменения в системе вследствие воздействий окружающей среды, например износ, которые наступают только через длительное время после изготовления исполнительного устройства. Таким образом, параметры можно автоматически определять без измерительных приборов при помощи регулятора в тот момент, когда его помещают в автомобиль. Благодаря этому для определения характеристик можно не применять дополнительную передачу данных из измерительного устройства в устройство управления.
Как это всегда бывает, для регулирования определенного потока G с использованием полученных характеристик электронному регулятору должен быть известен еще и перепад давлений ΔР в клапане. Согласно способу это рассчитывают приблизительно или замеряют датчиком известным образом на базе модели. Если, например, имеется лишь датчик давления в области сдвоенного цилиндра, то перепад давлений определяют, в частности, по временной характеристике величин, влияющих на давление, таких как время восстановления давления. При таком интегрирующем способе для определения градиентов давления большое значение имеет точность прохождения потока.
Как уже в общем было сказано, оказалось, что причина того, что разброс характеристик или, в частности, их градиентов остается, кроется преимущественно в допусках механики, например в колеблющейся силе пружины Fпруж и характеристиках электромагнитной цепи (например, электромагнитных сопротивлений воздушного зазора и т.д.) исполнительного устройства.
Согласно предпочтительному варианту выполнения способа измеряют электромагнитное общее сопротивление электромагнитной цепи. Это значит, что для реализации способа соответствующим образом вместо электромагнитного сопротивления можно использовать в качестве эквивалентной физической величины также индуктивность L соответствующей электромагнитной цепи в пересчете на число витков N катушки.
Изобретение относится, кроме того, к клапану согласно п.11 формулы, который имеет один или несколько дополнительных измерительных элементов, в частности измерительные катушки.
Измерительные катушки могут существовать электрически независимо от катушек возбуждения. Согласно предпочтительному варианту выполнения изобретения возможно включать измерительные катушки в сеть наряду с катушками возбуждения. Благодаря этому становится выгодным выведение наружу только трех возбуждающих проводов.
Кроме того, изобретение относится к способу отрегулирования положения «открыто» и/или потока для исполнительного устройства, в частности клапана.
Поток G исполнительного устройства или клапана определяют в принципе наряду с учетом перепада давлений и геометрических характеристик течения при помощи силы, которая действует на толкатель клапана упомянутого исполнительного устройства (толкающая сила). Поэтому изобретение относится предпочтительно также к способу установки или регулирования толкающей силы исполнительного устройства.
С помощью измерительного элемента, расположенного согласно другому варианту выполнения изобретения в области исполнительного устройства, можно определить внутренние физические параметры исполнительного устройства и учесть их при расчете характеристик. Таким образом, абсолютно точно при помощи описанного выше регулирования можно устанавливать или регулировать положение толкателя клапана, толкающую силу или поток исполнительного устройства.
В качестве измерительного элемента можно использовать - кроме катушки - в принципе все зависящие от электромагнитного поля чувствительные элементы (например, датчики Холла, магниторезонансные датчики), если они подходят для регистрации эффективного электромагнитного потока. Катушку можно использовать наиболее целесообразно из-за возможности ее недорогого изготовления.
Согласно заявленному способу в стандартной программе калибровки определяют силу пружины, а если необходимо, то и максимальную длину хода толкателя. Эти значения входят затем в расчет силы.
Особенность заявленного способа заключается, кроме прочего, в том, что проводят измерение электромагнитного потока и, в частности, регулируют его. Это целесообразно, так как электромагнитная сила напрямую зависит от магнитного потока. Здесь имеется существенное отличие от известных до сих пор способов, при которых ток от катушки является определенной величиной.
С помощью описанного способа измеряют предпочтительно максимальную длину хода толкателя внутри исполнительного устройства и, в частности, силу пружины. Путем дополнительного учета известного градиента давления можно очень точно определить характеристику силы/пути исполнительного устройства, так что проходящий через клапан поток можно с большой точностью регулировать или управлять им.
Кроме этого, изобретение относится к применению заявленного способа для контроля или улучшения качества изготовления исполнительного устройства, в частности клапана, в котором длину хода толкателя и/или силу пружины измеряют во время изготовления или сразу после изготовления исполнительного устройства, или клапана, или гидравлического клапанного блока.
В другом предпочтительном варианте выполнения упомянутого в предыдущем абзаце способа наряду с описанной далее калибровкой выполняют дополнительную механическую выверку исполнительного устройства в процессе изготовления.
При этом, в частности при сборке исполнительного устройства, отрегулируют зазор для остаточного воздуха и саму длину хода толкателя при помощи электрической характеристики. Это происходит наиболее предпочтительно таким образом, что измеряют электромагнитное сопротивление при закрытом исполнительном устройстве и электромагнитное сопротивление при открытом исполнительном устройстве.
К этому способу выверки можно подключить позже дополнительно электрический способ калибровки в отсутствие давления. При таком способе калибровки в отсутствие давления с заранее отрегулированным исполнительным устройством нужно компенсировать при помощи способа по существу лишь только допуск в характеристике возвратной пружины.
Изобретение относится не только к способу калибровки, но также и к способу определения давления согласно п.20 формулы, при котором по силе, действующей на толкатель, определяют давление в гидравлической жидкости. При таком способе измерения давления используют общий принцип регулировки силы толкателя, лежащий в основе изобретения.
Дальнейшее улучшение заявленного способа заключается предпочтительно в том, что после заявленной калибровки дополнительно осуществляют уже упомянутый в DE 10321783.5 метод калибровки.
Согласно другому независимому варианту выполнения заявленного способа на отводе катушки или на отводе измерительной катушки измеряют интеграл при помощи наиболее просто сконструированного так называемого электронного формирующего переключателя прямоугольной формы. При этом речь идет о способе расчета электромагнитного потока по меньшей мере в одном исполнительном индуктивном устройстве или обобщенно в исполнительном модуле, возбуждаемом от электрического возбуждающего каскада, путем оценки или настройки напряжения Uинд, индуктирующего исполнительное устройство или исполнительный модуль, при помощи электронного измерительного устройства, причем напряжение на исполнительном индуктивном устройстве или исполнительном модуле активно сохраняет по существу постоянное значение благодаря измерительному устройству или электронной настройке исполнительного индуктивного устройства или исполнительного модуля, и определяют время t1, в течение которого ток, проходящий через индуктивный модуль и измерительное устройство, при включении или выключении индуктирует напряжение.
В этом независимом способе определяют предпочтительно время выключения tc, которое составляет время между подключением t0 и временем t1, или время подключения исполнительного модуля.
В связи с описанным выше способом изобретение относится еще и к электронному схемному устройству для определения электромагнитного потока или индуктивности исполнительного индуктивного устройства или исполнительного модуля, включающему в себя измерительное устройство с входом и выходом для сигнала, причем вход для сигнала связан при помощи электрического тока с индуктивным модулем, а на выходе подготавливается электрический сигнал, который содержит информацию о времени, которое необходимо для того, чтобы в исполнительном индуктивном устройстве или исполнительном модуле полностью отводить накопленную энергию при постоянном напряжении или сделать ток в исполнительном устройстве или исполнительном модуле желательно максимальным.
В описанном выше устройстве сигнал, выходящий из измерительного устройства, подается в виде фактической величины схемы регулирования, регулирующая величина которого представляет собой ток, проходящий через индуктивный модуль.
Описанный выше способ измерения и схемное устройство используют для измерения интегрированного сигнала напряжения на отводе катушки исполнительного устройства описанным вначале способом калибровки вместо измерительного устройства.
Другие предпочтительные варианты выполнения приведены в зависимых пунктах формулы, а последующее описание примеров выполнения дается со ссылкой на чертежи.
Фиг.1 - схема регулировочного контура для регулирования магнитного потока без дополнительной измерительной катушки;
фиг.2 - пример выполнения регулирования магнитного потока с измерительной катушкой;
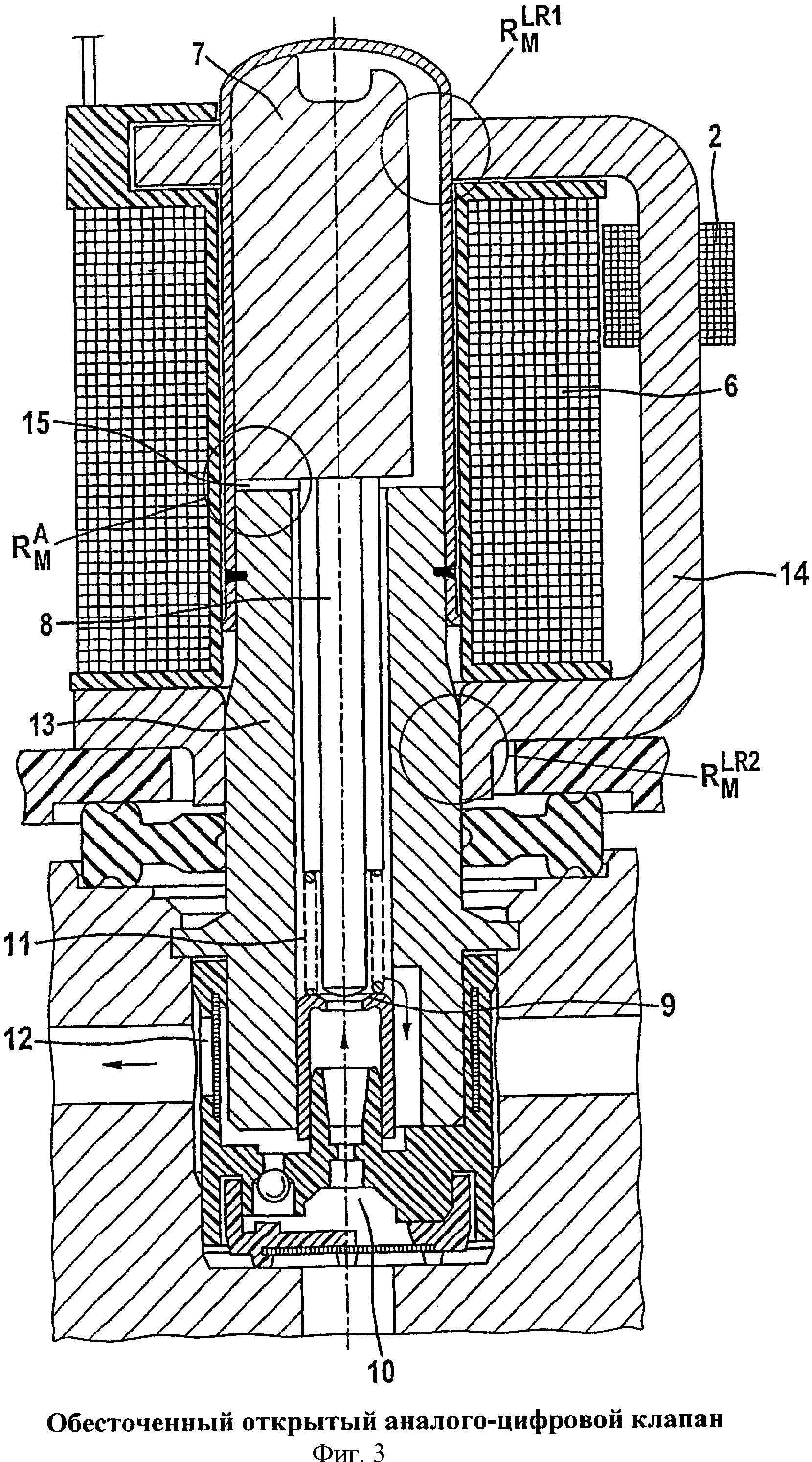
фиг.3 - поперечное сечение обесточенного открытого аналого-цифрового клапана;
фиг.4 - выполнение с измерительной катушкой аналогично фиг.2 с той лишь разницей, что в качестве регулирующей величины используют электромагнитное сопротивление;
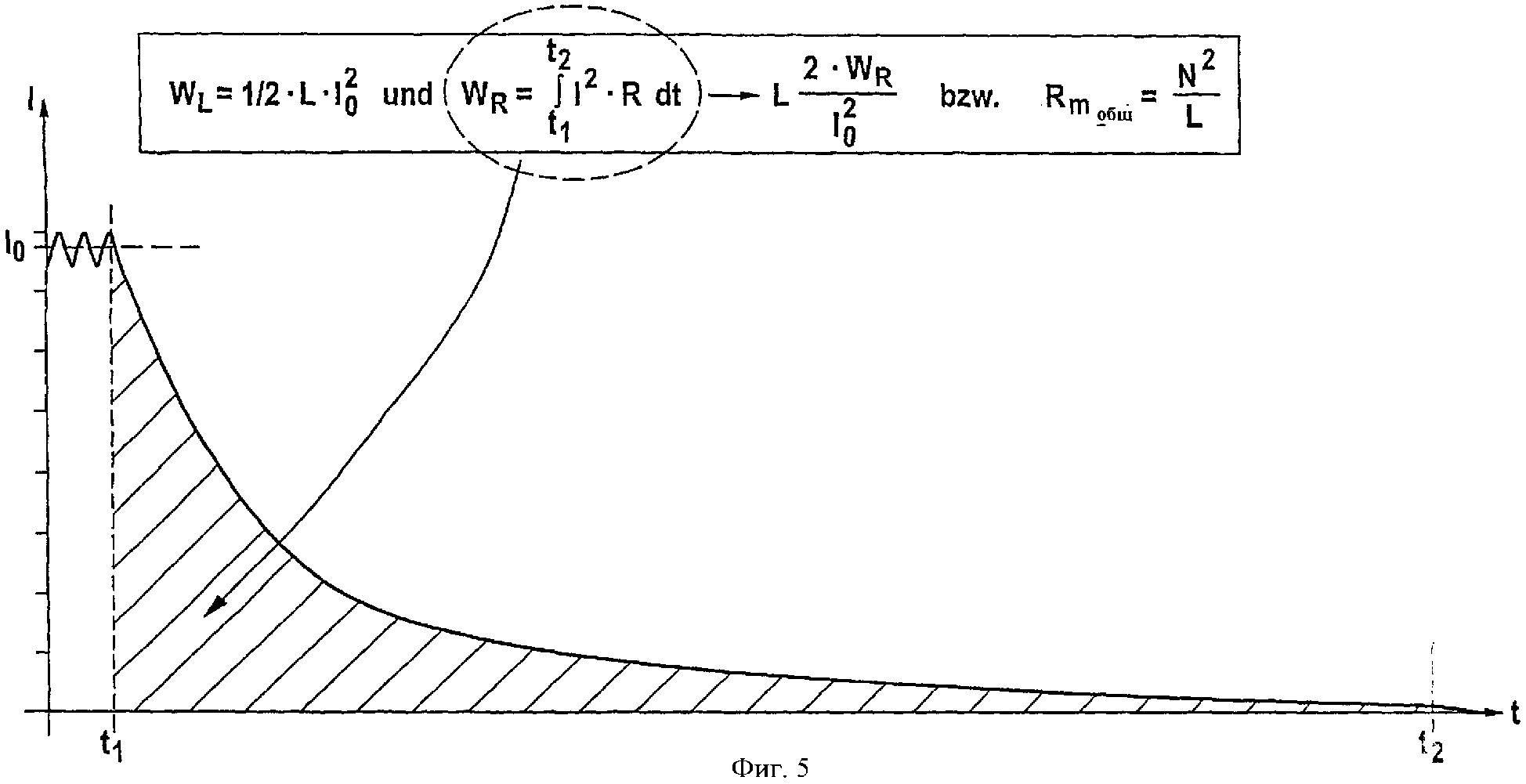
фиг.5 - пример на определение электромагнитного сопротивления при закрытом клапане;
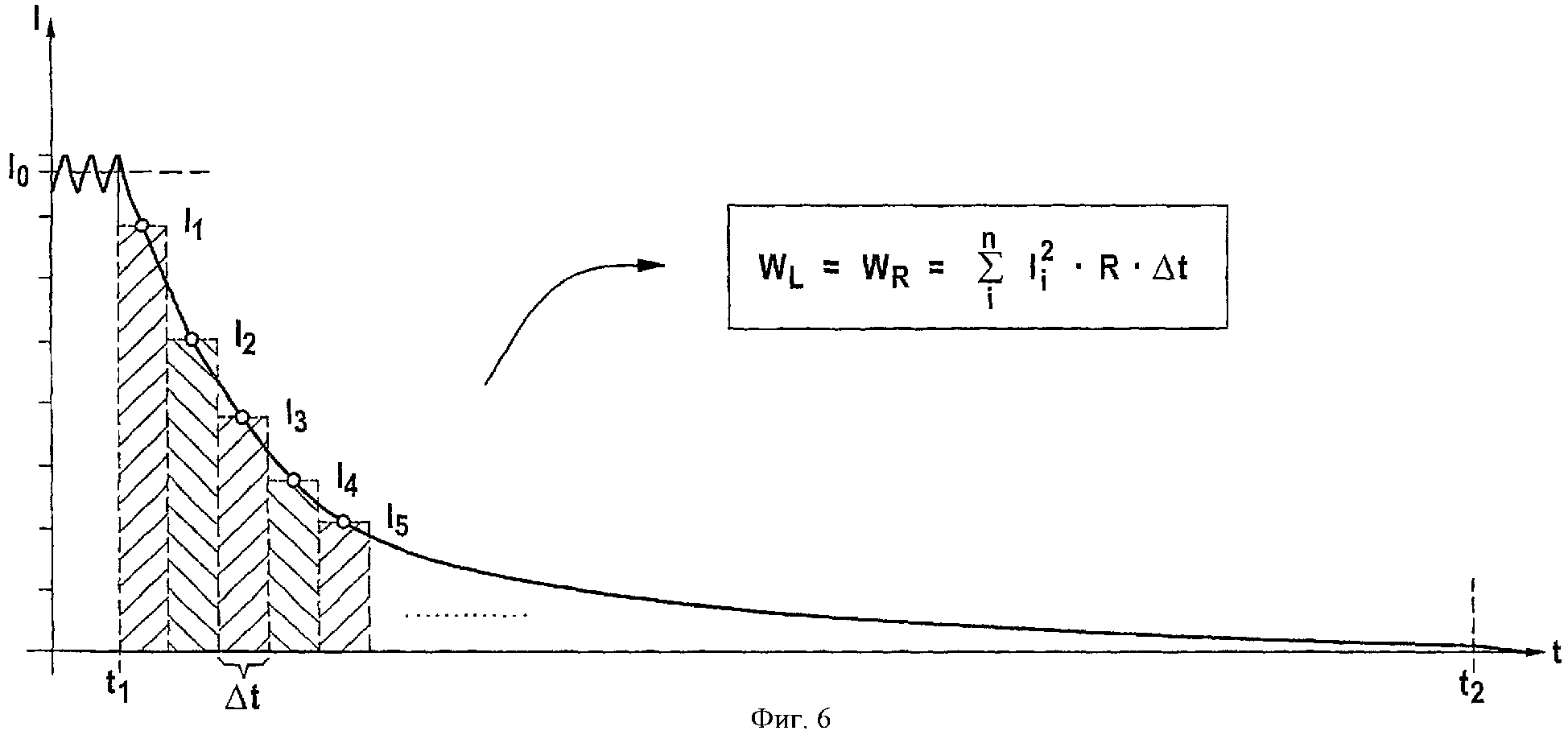
фиг.6 - пример на способ определения электромагнитного сопротивления в устройстве управления тормозной системой с электронным регулятором;
фиг.7 - пример на способ определения силы пружины электромагнитного клапана;
фиг.8 - схема способа определения характеристики индуктированного при отпирании клапана тока;
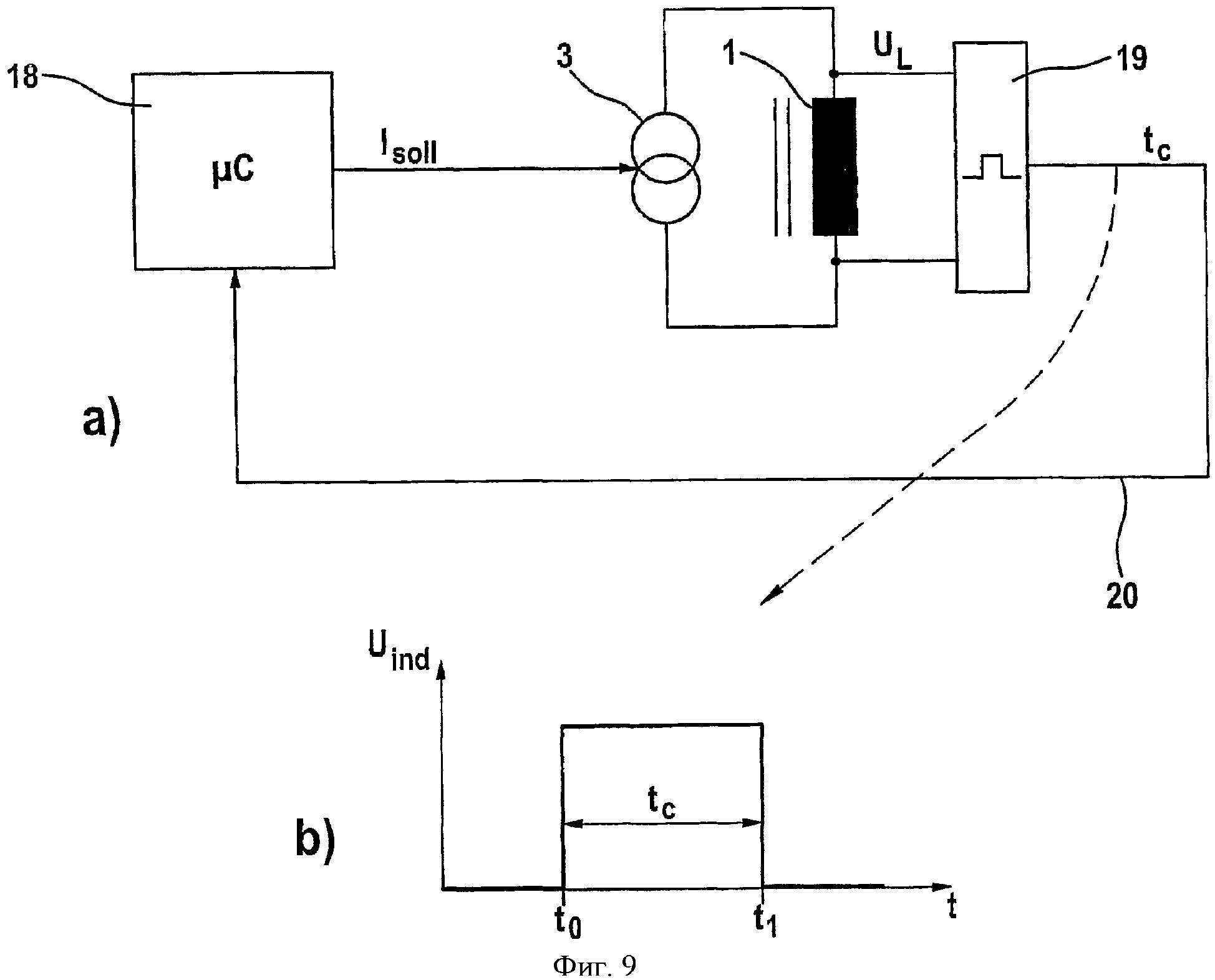
фиг.9 - схема регулировочного контура для калибровки клапана с прямоугольным формирователем;
фиг.10: а) изображение кривой напряжения UL; b) изображение кривой прохождения тока, вызванного возбуждением с импульсной модуляцией;
фиг.11 - схема, показывающая принцип действия прямоугольного формирователя.
Описанные далее примеры используются в электрогидравлическом регулировочном устройстве для тормозной системы автомобилей. Обычно соответствующие регулировочные устройства (устройство управления тормозной системой с электронным регулятором) включают в себя корпус регулятора с микроконтроллером 18, как это видно на схеме на фиг.1, 2 и 4, и связанный с регулятором клапанный блок с электромагнитными клапанами 1, предназначенными для управления потоком гидравлической жидкости. Кроме этого регулятор включает в себя возбуждающий переключатель (источник тока 3), с помощью которого можно осуществлять управление током I с импульсной модуляцией индивидуально для каждого клапана, а также его измерение. В устройстве управления автомобиля, здесь подробно не представленном, для каждого клапана предусмотрены соответствующие возбудители клапанов, которые действуют благодаря индивидуально возбуждающим каскадам с импульсной модуляцией. На клеммах катушки предусмотрено измерительное устройство 4, с помощью которого можно измерить индуктированное напряжение Uинд. На выходе измерительного устройства 4 существует сигнал Ффакт, который пропорционален интегральной зависимости от Uинд(t).
Для дальнейшего освещения изобретения кажется целесообразным привести следующие математические отношения.
Электромагнитная сила получается так:
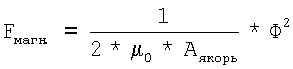
причем µ0 обозначает постоянную магнитной проницаемости (воздух), Аякорь обозначает площадь якоря, а Ф обозначает электромагнитный поток.
Электромагнитный поток рассчитывают по формуле
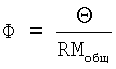
причем I обозначает ток катушки, N обозначает число витков катушки клапана, а RМобщ - общее электромагнитное сопротивление электромагнитной цепи в клапане.
Кроме того,


При отключении тока клапана I на фиг.1 возникает изменение электромагнитного потока Ф в клапане 1, которое можно измерить при помощи измерительного устройства 4, связанного с клапаном 1 через индуктированное напряжение Uинд. Измерительное устройство 4 образует временной интеграл от характеристики индуктированного напряжения Uинд и подает интегрированный сигнал в микроконтроллер 18. Этот сигнал пропорционален электромагнитному потоку Ф, вызванному катушкой клапана. Альтернативное измерительное устройство для определения этого интеграла описано далее в связи с фиг.9.
Благодаря тому что сигнал измерительного устройства возвращается в микроконтроллер, можно управлять потоком или регулировать его. Ток, проходящий через катушку клапана 1, образует в ней собственное регулирующее воздействие.
С помощью управления или регулирования электромагнитного потока компенсируют имеющиеся индивидуальные допуски при изготовлении клапана (постоянная упругости и воздушный зазор в электромагнитной цепи). Градиент давления G, который нужно отрегулировать, задан аналоговым/электронным регулятором тормозной системы внутри вычислительного блока µС (устройство управления тормозной системой с электронным регулятором). Перепад давлений известен вычислительному устройству. В зависимости от оснащения устройства регулировки тормозной системы он определяется полностью при помощи датчиков или известным образом частично при помощи модели давления. Силу пружины, максимальную длину хода толкателя и зависимость электромагнитного потока от тока клапана измеряют соответственно описанным способом один раз или в разные моменты (рекалибровка). Таким образом, все действующие силы и рассчитанная функция силы/пути толкателя клапана известны; можно рассчитать ток клапана, необходимый для требуемого градиента давления.
На фиг.2 представлена другая возможность реализации изобретения с дополнительным регулировочным контуром катушки. Необходимый градиент давления G находится также в вычислительном блоке (µC). Перепад давлений вычислительному блоку известен. Силу пружины и максимальную длину хода толкателя определяют с помощью описанного способа измерения. Электромагнитный поток регистрируют при помощи измерительной катушки 2. Измерительная катушка расположена так, что регистрирует эффективный электромагнитный поток при помощи ярма и якоря. При включении и отключении катушки клапана в измерительной катушке индуктируют напряжение Uинд, интеграл которого пропорционален существующему электромагнитному потоку. Сигнал Ффакт, который выведен из значения интеграла, полученного при помощи каскада 4, подается в дифференцированный каскад 5 вместе с сигналом Фзадан и образует заданную величину для возбудителя клапана 3.
Как уже говорилось, способ измерения для определения присущих клапану характеристик можно повторять (рекалибровка) в любое время, даже во время работы автомобиля, например чтобы компенсировать вызванные эксплуатацией изменения или износ механических или также конструктивных электрических элементов. Электронное управление повышает при помощи возбудителя 3 ток катушки до тех пор, пока электромагнитный поток не будет соответствовать рассчитанному потоку в электромагнитной цепи. В примере, представленном на фиг.2, речь идет, таким образом, о регулировании силы толкателя, при котором положение толкателя зависит от соотношений давления клапана.
На фиг.3 показана конструкция применяемого согласно изобретению электромагнитного клапана в блоке тормозной системы с аналоговым регулятором/электрофильтром. Клапан согласно примерам в заявленном изобретении представляет собой обесточенный открытый клапан, который может работать и которым можно управлять известным образом при помощи отрегулированного тока с импульсной модуляцией. Соответствующие клапаны известны под названием «аналого-цифровые клапаны». Далее описывается конструкция такого аналого-цифрового клапана, в частности компоненты электромагнитной цепи, ведущие характеристики. Катушка клапана 6, к которой поступает электрический ток, служит для движения якоря 7, который расположен по оси в корпусе клапана 13 и входит с уплотнением в седло клапана 9 при помощи толкателя 8. Через впускное отверстие клапана 10 течет гидравлическая жидкость к седлу клапана 9 и вытекает через выпускное отверстие 12. Пружина 11 выдавливает толкатель и якорь в открытое положение, поскольку ток не течет через катушку 6. Когда к катушке 6 поступает ток, электромагнитные линии проходят в ярмо 14 и в корпус 13. Переходное место между ярмом 14 и корпусом 13 образует электромагнитное сопротивление RМLR2. Далее линии тока проходят в воздушный зазор 15 между якорем 7 и корпусом 13, причем существующее в этом месте электромагнитное сопротивление обозначено RMA. Между якорем 7 и ярмом 14 получается еще один воздушный зазор, с которым связано электромагнитное сопротивление RMLR1.
Электромагнитное сопротивление магнитной цепи определяют, таким образом, по существу путем суммирования: RМобщ=RMLR2+RMA+RMLR1. Здесь уже видно, что магнитное сопротивление зависит по существу от величины воздушных зазоров, обусловленных при изготовлении, и от положения толкателя. Таким образом, можно представить магнитное сопротивление в виде суммы измеренного магнитного сопротивления в закрытом положении RМклапан и магнитного сопротивления воздушного зазора RМвоздух:
RМобщ=RМклапан+RМвоздух.
Величину RМклапан можно измерить в закрытом положении, а величина RМвоздух получается из формулы
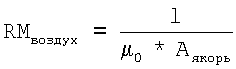
На фиг.3 представлена, кроме того, измерительная катушка 2, которая необходима для реализации указанного на фиг.2 примера выполнения и установлена в области ярма 14.
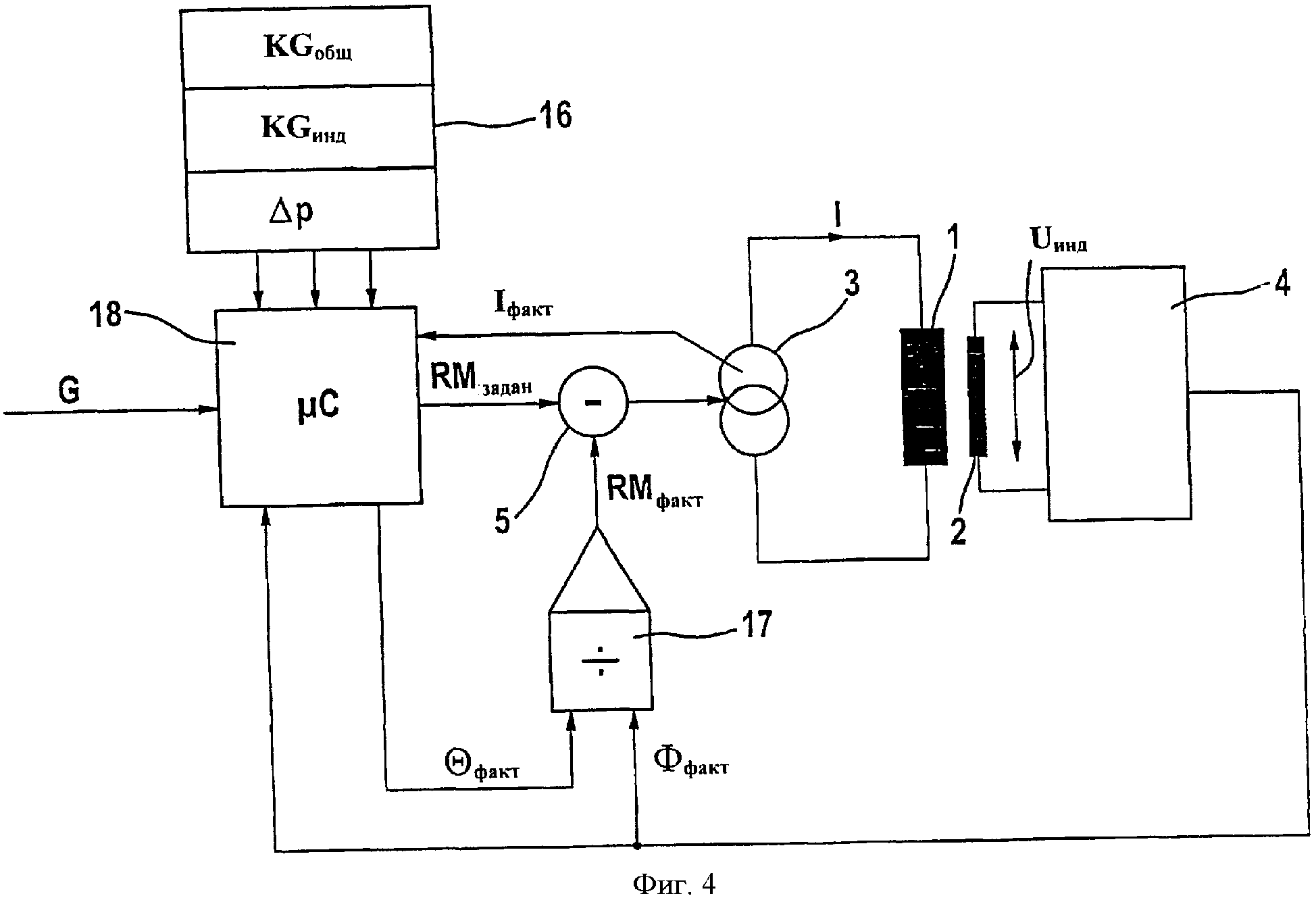
На фиг.4 дана схема другого примера регулировочной цепи, когда длину хода 1 толкателя регулируют напрямую. Как уже было сказано, магнитное сопротивление RМобщ получают из магнитного сопротивления закрытого клапана и магнитного сопротивления воздушного зазора. Магнитное сопротивление закрытого клапана можно измерить один раз. RМобщ представляет собой частное от деления Θ (=I*N) и магнитного потока Ф. Величину RМвоздух получают из значения длины хода толкателя, поделенного на µ0*А (µ0 = постоянная проницаемости, А = площадь поперечного сечения). Кроме того,
Способ согласно примеру фиг.4 предлагает также возможность определения давления в линиях с текучей средой, подсоединенных к клапану, без дополнительных датчиков давления в отдельных датчиках. При постоянном положении толкателя, которое должно удерживаться при помощи регулятора, можно рассчитать давление по аналогии с описанным выше способом из значения силы толкателя, измеренной фактически при таком положении толкателя, связав его с известными общими характеристиками КGобщ клапана.
В тормозной системе автомобиля входное давление определяют, например, нажав педаль тормоза. Как известно, во время, например, аналогового регулирования в тормозной системе входное давление отличается от давления в отдельных гидравлических трубопроводах, ведущих к тормозным цилиндрам. Так как в принципе при помощи описанного выше способа измерения можно определить только лишь перепад давлений, действующий на клапан, то может случиться так, что понадобится определить первичное давление при помощи чувствительных элементов (например, при помощи датчика давления на двухполосном главном тормозном цилиндре). Первичное давление можно, однако, вычислить также путем моделирования. Кроме того, можно определить давление, точно не зная первичное давление, путем наблюдения за определенными рабочими состояниями тормозной системы. Таким образом, можно определить давление, полностью отказавшись от датчиков давления. Благодаря этому в устройстве управления тормозами с аналоговым регулятором можно не устанавливать дополнительные датчики давления и сэкономить значительные средства.
На диаграмме фиг.5 показано прохождение тока в катушке клапана после отключения тока, т.е. при закрытом клапане. Из интеграла под кривой прохождения тока можно определить электромагнитное сопротивление RМобщ при известном числе витков N катушки. Физическая взаимосвязь получается из формул, данных на фиг.5 в рамке, причем WL обозначает электромагнитную энергию магнитной цепи, a R обозначает омическое сопротивление электрической цепи катушки.
Пример способа измерения для определения электромагнитного сопротивления согласно принципу, показанному на фиг.5, представлен на фиг.6. На первом этапе задается значение тока I0 при помощи устройства управления тормозной системой с электронным регулятором (регулированно), при этом клапан надежно закрыт. После этого режим регулирования с импульсной модуляцией задается так, что ток больше не поступает в возбудитель катушки. Ток, накопленный в результате индуктивности, затухает в результате рециркуляционной возможности оконечного каскада.
Затем измеряют прохождение тока в заданные моменты времени через равные промежутки (I1, I2, I3, …) в период времени от t1 до t2. Измеренные значения хранятся в электронной памяти в устройстве управления. Формула, приведенная в рамке на фиг.6, показывает возможность образования интеграла WL через сумму.
Согласно способу, представленному на фиг.7, постепенно увеличивают ток, начиная с малого, например нулевого. В примере а) удерживают ток сначала со значением I1, при котором клапан как раз еще открыт, т.е. при более высоком значении тока клапан бы закрылся. К моменту t1 ток отключают и измеряют время τ1, пока фактическое значение тока не упадет ниже предельной величины S (момент t2). Из-за открытого положения клапана возникает низкая индуктивность и тем самым короткая постоянная времени τ1 при экспоненциальном режиме падения тока.
На примере b) показана кривая прохождения тока, когда соответствующим клапаном управляет ток I2, который вызывает закрытие клапана. Процесс закрытия показан при помощи кратковременного роста кривой тока 71 в области постоянного тока. К моменту t1 ток, как описано выше, отключают, и его величина падает ниже порога S. В отличие от случая с открытым клапаном постоянная времени τ1 закрытого сначала клапана из-за более низкого электромагнитного сопротивления (более высокая индуктивность) в примере b) выше, чем соответствующая постоянная времени в примере а). К тому же отпирание клапана, которое видно по росту кривой тока 72, также вызывает увеличение постоянной времени.
На фиг.8 представлена схема примера алгоритма 82 для расчета характеристики индуктированного при отпирании клапана тока при помощи индивидуальных, специфических для клапана значений КGинд (способ измерения 81), полученных по примерам, приведенным на фиг.5-7, в электрогидравлическом устройстве управления 82. В отношении индивидуальных, специфических для клапана значений КGинд речь может идти, в общем, о характеристиках или параметрах клапана. В электронном устройстве управления тормозами с помощью аналоговой функции и при необходимости других функций, например (автоматическое) регулирование привода ведущих колес (по их буксованию), электрофильтр и др., для регулировки клапана с высокой точностью нужна кривая, которая ведет необходимый для отпирания клапана ток при заданном перепаде давлений ΔР (зависимая от перепада давлений токовая характеристика f(ΔP) для отпирания клапана). Для алгоритма 82 задают со стороны входа общие характеристики КGобщ, находящиеся в памяти регулятора, которые характерны для целого ряда клапанов. Их можно точнее обозначить специальными для конструктивного ряда терминами «площадь якоря» Аякорь и «площадь уплотнения клапана» Ауплотн. Кроме того, задают фактический перепад давлений ΔР для соответствующего клапана на входе в виде переменной величины (перем.), которую определяют либо при помощи датчика, либо рассчитывают приблизительно при помощи устройства управления тормозной системой с электронным регулятором по другим значениям.
В соответствии с алгоритмом 82 согласно установленному в регуляторе поперечному сечению уплотнения Ауплотн (общие характеристики клапана КGобщ) рассчитывают сначала гидравлическую силу Fгидравлич по Fгидравлич=ΔР*Ауплотн. По заданной площади якоря Аякорь и электромагнитному сопротивлению RM можно рассчитать зависимую от тока электромагнитную силу Fмагн (I). В положении равновесия клапан еще закрыт. Необходимая для этого электромагнитная сила Fмагн дает удерживающий ток:
Fпруж+Fгидравл=Fмагн.
С помощью этой формулы можно относительно точно рассчитать, учитывая площадь уплотнения клапана и поперечное сечение уплотнения, удерживающий ток, зависящий от перепадов давлений, для дискретных перепадов давлений (объемного тока в клапане нет).
Для использования в устройстве управления тормозной системой с электронным регулятором с целью повышения точности полученных значений удерживающих токов целесообразно также выполнять дополнительные корректировки А)-С), о которых речь пойдет ниже.
А) Корректировка индуктированного при отпирании тока/удерживающего тока
Так называемые удерживающие токи, полученные по уравнению баланса Fпруж+Fгидравл=Fмагн при определенном перепаде давлений, еще не соответствуют индуктированным при отпирании клапана токам, в действительности необходимым для отпирания клапана, так как они из-за эффекта потока все еще ниже, чем рассчитанные удерживающие токи. Оказалось, что более точные характеристики индуктированного при отпирании клапана тока Iразмык (ΔР) можно получить предпочтительно за счет того, что в необходимой области перепада давлений характеристики удерживающего тока Iудерж (ΔР) нужно суммировать негативное постоянное смещение (несовпадение?) тока Iкоррпостоян. Смещение (несовпадение?) тока можно определить просто при помощи испытаний:
Iразмык(ΔР)=Iудерж(ΔP)-Iкоррпостоян.
B) Электромагнитная корректировка
Описанный далее расчет характеристики удерживающего тока основывается на упрощенном допущении, что электромагнитное сопротивление при закрытом клапане не зависит от тока. Из-за влияния ферромагнитных материалов, имеющихся в электромагнитной цепи клапана, есть смысл - для дальнейшего повышения точности - выполнить еще одну корректировку, с помощью которой можно откорректировать такое влияние магнитной цепи. Для корректировки этого влияния применяют, в частности, уравнение прямой для характеристики электромагнитного сопротивления закрытого клапана: RM(I)=m*I+b. Эту кривую можно определить путем измерения RM при разных токах I1, I2, In, причем все значения In больше, чем значение тока включения соответствующего клапана. В предложенном примере получают рост m в области

C) Температурная корректировка
Как получается из формул, данных в рамке на фиг.5, электромагнитное сопротивление RМобщ пропорционально значению 1/RL, причем RL, обозначает сопротивление катушки, если для простоты исходить из того, что сопротивление электрической цепи определено исключительно через сопротивление катушки. В описанном способе до сих пор всегда исходили из того, что RL является специфической для конструктивного ряда величиной, которую не нужно учитывать. Из-за сопротивления катушки изменения ее температуры нежелательным образом влияют также на измеренное электромагнитное сопротивление. Корректирующий член, устраняющий это влияние, способствует лучшему способу расчета. Такая температурная корректировка измеренного электромагнитного сопротивления может способствовать предпочтительно тому, что по рабочему циклу управления клапаном с импульсной модуляцией определяют сопротивление катушки. Подходящий для этого способ определения сопротивления катушки описан в WO 03/074338 A1.
Описанные выше примеры выполнения касаются клапана, который обесточен и открыт. Аналогичным образом описанный способ можно использовать для клапанов, которые обесточены и открыты.
Представленный на фиг.9а пример выполнения иллюстрируется схемой аналогично фиг.1, с той лишь разницей, что для упрощенного измерения индуктированного напряжения предусмотрен прямоугольный формирователь 19, изображенный на фиг.11. Прямоугольный формирователь 19 можно использовать также выгодно вместо измерительного устройства 4 на фиг.2. Как уже было описано, электронный регулятор тормозной системы включает в себя задающий генератор 3 (источник тока), с помощью которого ток клапана I можно задать индивидуально для каждого клапана с импульсной модуляцией и измерить. При наличии прямоугольного формирователя 19 можно очень просто измерить индуктированное напряжение Uинд, измерив время, как это показано на примере b). Магнитный поток в катушке 1 исполнительного устройства индуктирует при отключении тока в момент t0 напряжение UL (напряжение на клеммах), так что ток во время отключения t0 падает до значения 0. Характеристика напряжения UL подробнее представлена на фиг.10а. Кривая тока, полученная во время этого благодаря регулированию тока с импульсной модуляцией, представлена на фиг.10b.
Величины RL (сопротивление катушки), UL (отрегулированное коммутирующее напряжение), а также I0 (ток клапана) известны вычислительному устройству 18. Время tc, которое пропорционально индуктивности L, определяют при помощи прямоугольного формирователя 19. На выходе прямоугольного формирователя 19 есть электрический сигнал, который пропорционален tc. Этот сигнал подается по проводнику 20 в вычислительное устройство 18 в качестве фактической величины для предпринимаемого регулирования.
На электронной схеме фиг.11 показан принцип работы прямоугольного формирователя 19. Источник тока 3 состоит из генератора тока 21 и рециркуляционной цепи 22, которая управляет рециркуляционным током после отключения тока на момент t0 с управляемым сопротивлением, причем рециркуляционной цепью 22 управляет вычислительное устройство 18. Соответствующая коммутируемая цепь для управления гидравлическими клапанами уже известна из заявки на патент DE 102004017239.0. С клеммой U0 соединен первый делитель напряжения 51, состоящий из сопротивлений R1 и 9R1, который понижает высокие значения напряжения U0 на входе сигнала S+ компаратора 53 примерно на коэффициент (фактор) 10. Второй делитель напряжения 52 создает на входе S- компаратора 53 опорное напряжение, которое равно половинному напряжению, ответственному за логику. Компаратор 53 оценивает тем самым разность сигналов S+ и S-, благодаря чему формируется подходящий сигнал прямоугольной формы.
При помощи рециркуляционной цепи 22 ток после отключения можно скоммутировать за относительно короткое время (менее чем за 1 мс), как это показано на фиг.10b. При этом для напряжения на клеммах UL устанавливают постоянное значение Uпостоян (фиг.10а). Во время известного регулирования тока с импульсной модуляцией напряжение на U0 повышается максимально примерно до 18 В, так что на входе S+ никогда не бывает больше 2,5 В. Выход компаратора остается тем самым на «логическом нуле». К началу коммутирования напряжение U0 растет, однако, до 35 В, благодаря чему на S+ значительно более высокое напряжение, чем на S-. Следствием этого является переключение компаратора на «логическую 1», пока напряжение U0 соответственно в конце коммутирования снова не упадет до 0 В. После этого компаратор снова переключается на «логический 0». Тем самым длительность «логической 1» соответствует на выходе компаратора длительности tc коммутирования.
Индуктивность катушки рассчитывается из характеристики тока во время коммутирования между моментом t0 и моментом t1 по формуле:

При помощи специального регулирования, при котором UL постоянно удерживается между временем t0 и t1, временной интеграл, рассчитываемый для определения индуктивности катушки, будет особенно простым. Индуктивность катушки клапана можно затем очень просто определить следующим образом:
Реферат
Изобретение относится к способу калибровки тока возбуждения исполнительного устройства. Способ заключается в том, что предварительно определяют степень влияния давления при отсутствии датчиков давления при помощи силы электрического управления исполнительного устройства. Используют одну или несколько специфичных для исполнительного устройства характеристик. С помощью характеристик целенаправленно устанавливают заданный поток в зависимости от силы тока. Специфичные для исполнительного устройства характеристики определяют автоматически и свободно от нагрузки давлением исполнительного устройства. Технический результат заключается в повышении точности регулирования электромагнитного клапана. 12 з.п. ф-лы, 11 ил.
Комментарии