Способ регулирования тормозного давления в автомобильной системе плавного действия - RU2016792C1
Код документа: RU2016792C1
Чертежи
Описание
Изобретение относится к способу регулирования тормозного давления в автомобильной тормозной системе плавного действия, при котором измеряется вращение тормозящегося колеса и, если проскальзывание колеса и/или замедление вращения превосходят предопределенные пороговые значения, тормозное давление изменяется.
В случае обычных автомобильных тормозов, оборудованных системой плавного торможения, постоянно контролируется вращение индивидуальных колес автомобиля, в частности проскальзывание тормозящихся колес, и определяется их замедление, чтобы обнаружить тенденцию колеса к жесткому торможению и предотвратить его. Как только проскальзывание или замедление покажет склонность колеса к жесткому торможению, подтверждаемую тем фактом, что превзойдены определенные пороговые значения, касающиеся проскальзывания и/или замедления, дальнейшее возрастание давления в тормозе рассматриваемого колеса прекращается или тормозное давление уменьшается.
Основные принципы устройства и работы автомобильных тормозных систем мягкого действия известны.
В известном способе управления процессом торможения в течение периодов постоянного тормозного давления определяется замедление колеса и выясняется, уменьшается ли оно (либо остается постоянным) или увеличивается. В зависимости от того, уменьшается или увеличивается определяемое замедление колеса, регулируется тормозное давление. При этих известных способах сравнение замедлений колеса является абсолютным, т.е. определение того, уменьшается ли или увеличивается замедление колеса, относится исключительно к знаку ускорения колеса: иначе говоря, показывает, замедляется ли колесо или ускоряется. Сравнение между замедлениями колеса (или ускорениями) в течение последовательных временных интервалов не проводится. Если замедление колеса уменьшается во время фазы постоянного тормозного давления, тормозящееся колесо находится в стабильном диапазоне кривой коэффициент трения-проскальзывание. Если замедление колеса при постоянном тормозном давлении увеличивается, это значит, что колесо находится в нестабильном диапазоне кривой коэффициент трения-проскальзывание, так что тормозное давление должно быть уменьшено. Это означает, что сравнение проводится исключительно между величинами, которые измеряются, когда существует постоянное тормозное давление. Измерения вращательного движения колеса от одного временного интервала к следующему временному интервалу не производятся вовсе. Вместо этого проводится только сравнение между измеряемыми значениями и абсолютными значениями.
Цель изобретения - создать способ регулирования тормозного давления в автомобильной тормозной системе плавного действия, при котором замедление тормозящихся колес остается близким к оптимальному значению кривой коэффициент трения-проскальзывание.
Эта цель достигается тем, что при инициировании тормозящего действия после каждого предопределенного временного интервала определяется замедление вращения тормозящегося колеса и сравнивается с замедлением вращения, измеренным в течение предыдущего временного интервала, и по результату сравнения выполняется изменение тормозного давления.
Известный уровень техники предусматривает изменение тормозного давления на протяжении всех циклов тормозного действия в зависимости от того, превосходятся ли для тормозящегося колеса определенные пороговые значения. Изобретение предлагает совершенно иной путь. Как только тормозящее действие началось, общий ход времени подразделяется на короткие временные интервалы от 3 до 20 мс. Предпочтительны временные интервалы от 5 до 10 мс. Затем определяется замедление и/или ускорение вращения и сравнивается со значением из предыдущего временного интервала. Теперь тормозное действие регулируется в ответ на результат сравнения, а не на превышение определенных пороговых значений (как в известном уровне техники).
Таким образом, берутся приращения по оси времени и значения, относящиеся к вращению, измеренные в каждый двух смежных временных интервалах (разумеется, не считая первый), используются как параметры регулирования тормозного давления. Другими словами, в качестве решающей величины регулирования тормозного давления берется градиент скорости вращения.
Приращение по оси времени в системе плавного торможения известно из материалов ДЕ-OS 3201929, однако там оно служит другим целям.
В предпочтительной модификации изобретения, если сравнение показывает, что замедление вращения в течение последнего законченного временного интервала уменьшилось ниже заданного значения по сравнению со значением из предыдущего временного интервала, то предусмотрено понижение тормозного давления, по меньшей мере для части подошедшего временного интервала.
В математических выражениях формируется производная замедления по времени. Возможно также реализовать способ в соответствии с изобретением так, что, чисто математически, формируется производная и наблюдается ее вариация. Процедура в соответствии с изобретением имеет весьма короткое "время релаксации". Другими словами, по сравнению с обычным управлением настоящая система реагирует на изменения дорожных условий очень быстро. При обычных системах управления такое быстрое изменение по различным причинам нежелательно и поэтому устраняется фильтрацией. При предлагаемом способе изменение состояния управления в пределах нескольких миллисекунд возможно, а также желательно.
Предпочтительная модификация способа в соответствии с изобретением обеспечивает в начале тормозного действия приведение колеса в благоприятный диапазон кривой коэффициент трения-проскальзывание путем установки пороговых значений, касающихся проскальзывания и/или замедления колеса, обычным образом (например, порогового значения 1,5g, относящегося к замедлению, и порогового значения 20% , относящегося к проскальзыванию), за предопределенный период времени, причем этот период более продолжителен, нежели интервал временных приращений, обеспечиваемый в соответствии с изобретением. Сначала, до того как установится регулирование в соответствии с изобретением в предопределенные временные интервалы и до сравнения замедления вращения от одного временного интервала к другому, эти пороговые величины должны быть превзойдены. Чтобы избежать недоторможения нестабильного колеса в другой модификации изобретения предусмотрено, что если сравнение показывает, что замедление вращения в последнем законченном интервале времени уменьшилось более предопределенной величины по сравнению с этим значением предыдущего временного интервала, то тормозное давление прекращается. Кроме того, контролируется фаза обновленного ускорения колеса, которое имеет место после уменьшения давления, чтобы как можно быстрее привести колесо, которое стало нестабильным, обратно в стабильный диапазон кривой коэффициент трения-проскальзывание.
Таким образом, если абсолютное значение обновленного ускорения колеса слишком мало или если не отмечено увеличения ускорения, тормозное давление продолжает понижаться, даже если колесо уже снова набирает скорость. Это позволит быстрее попасть в оптимальный диапазон кривой коэффициент трения-проскальзывание.
В соответствии с предпочтительной модификацией изобретения такое понижение тормозного давления в фазе обновленного ускорения выполняется, только если колесо все еще находится в состоянии проскальзывания. По этой причине проскальзывание тормозящегося колеса постоянно контролируется и определяется, больше ли оно или нет, чем предопределенная величина.
Если давление в течение фазы обновленного ускорения колеса, когда колесо не находится более в состоянии достаточного проскальзывания, понижается далее, это вызовет дополнительное понижение давления, даже если колесо уже начинает становиться стабильным, так как при переходе в диапазон стабильности обновленное ускорение становится меньше.
Однако имеются поверхности дорог со сравнительно низким коэффициентом трения, на которых повторные ускорения колеса снова становятся меньше при его сильном проскальзывании. В этом случае существует риск, что система управления плавным торможением слишком рано покажет, что колесо снова вращается стабильно, и таким образом, переключится на повышение давления, хотя проскальзывание все еще велико. Это может выразиться в нежелательно раннем жестком торможении колес. Чтобы избежать этого, должна быть возможность выполнения понижения тормозного давления при определенных обстоятельствах даже в течение фазы обновления ускорения колеса, если проскальзывание не обнаружено, когда опорная скорость вычисляется слишком малой, хотя колесо фактически все еще находится в состоянии проскальзывания.
Обстоятельства, при которых в фазе повторного ускорения предусмотрено понижение давления, хотя компьютер не вычисляет никакого проскальзывания, в частности, следующие: колесо снова становится нестабильным после коротких интервалов повышения давления; понижение давления продолжается достаточное время (например 50 мс); в течение фазы обновленного ускорения не возникает высоких абсолютных значений ускорения например 5g.
Предпочтительные модификации изобретения предусматривают, что измеряется весь временной интервал повышения давления в течение фазы ускорения тормозящегося колеса, и если этот интервал короче заданного значения, тормозное давление понижается, даже если проскальзывание колеса не обнаружено.
В соответствии с другой предпочтительной модификацией способа измеряется временной интервал, в течение которого тормозящееся колесо движется в нестабильном диапазоне кривой коэффициент трения-проскальзывание, хотя оно имеет ускорение. Аналогично измеряется соответствующий временной интервал, в течение которого колесо движется в стабильном режиме кривой коэффициент трения-проскальзывание. Эти значения могут непрерывно запоминаться компьютером системы управления плавным торможением. Затем временной интервал нестабильности в течение фазы ускорения сравнивается с предыдущим временным интервалом стабильности колеса, и между обоими временными интервалами устанавливается соотношение (формируется отношение временных интервалов). Если это отношение больше предопределенной величины (например 1), имеет место последующее понижение давления, даже если проскальзывания колеса не обнаружено.
Кроме того, предпочтительно измеряется весь временной интервал понижения давления в течение фазы ускорения тормозящегося колеса, и, если этот интервал окажется длиннее предопределенного значения, выполняется понижение тормозного давления, даже если проскальзывания колеса не обнаружено.
В течение фазы ускорения тормозящегося колеса может быть предусмотрено также измерение соответствующих абсолютных значений ускорения в данные временные интервалы. Эти значения затем сравниваются с заданным значением ускорения, и, если все измеренные значения ускорения меньше предопределенной величины, выполняется понижение тормозного давления, даже если проскальзывания колеса не обнаружено.
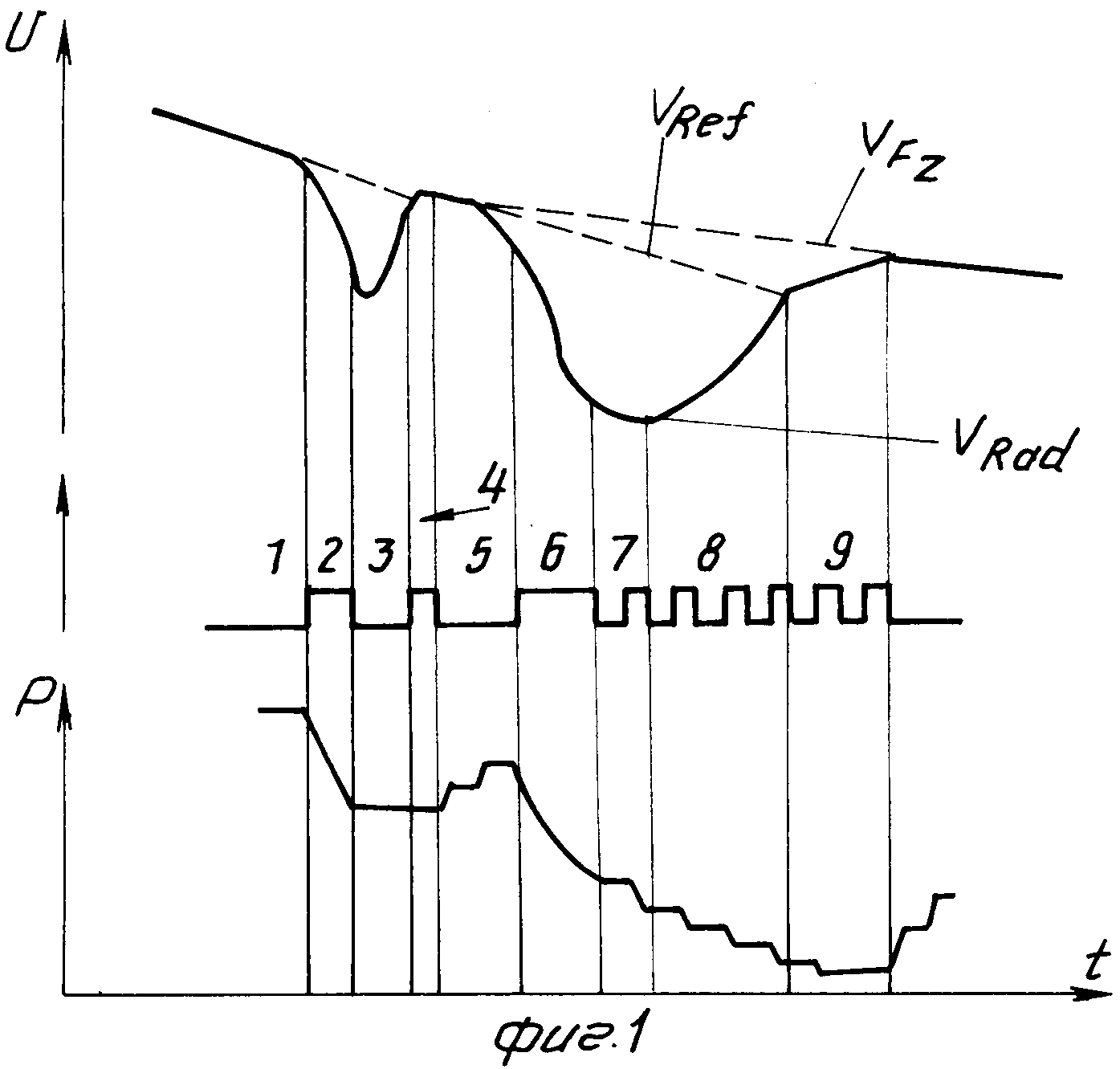
На фиг. 1 изображены графики окружной скорости VRad, так называемой опорной скорости VRef и скорости автомобиля VFZ, а также соответствующие положения клапана и график тормозного давления с общей временной осью; на фиг. 2 - блок-схема устройства для реализации предлагаемого способа.
На фиг. 1 различные фазы обозначены цифрами 1, 2...9. В фазах 1 и 5 тормозящееся колесо движется в стабильном режиме, как пояснено выше, т.е. в оптимальном диапазоне кривой коэффициент трения-проскальзывание. Во время фаз 2 и 6 имеет место непрерывное понижение давления (т.е. не пульсирующее понижение давления, а постоянное понижение), поскольку понижение замедления от одного временного интервала к другому (по 10 мс каждый) постоянно меньше заданной величины, например 1g/5 мс). В течение фазы 3 обновленное ускорение колеса больше заданного абсолютного значения, и оно также достаточно возрастает от одного временного интервала к другому, так что дальнейшего понижения давления не производится. Поэтому кривая имеет нижнее основное состояние, а это означает, что клапан понижения давления закрыт. Открытый клапан понижения давления иллюстрируется этапом 2. В течение фазы 4, хотя повторное ускорение мало, достаточного проскальзывания нет, так что давление не понижается. В течение фазы 7 снижение замедления вращения колеса от одного временного интервала к другому слишком мало, так что выполняется пульсирующее понижение давления. В течение фазы 8 ускорение колеса слишком мало, в частности увеличение ускорения, т.е. изменение скорости вращения от одного временного интервала к другому меньше заданной величины, так что пульсирующее уменьшение давления продолжается, чтобы быстрее привести скорости вращения колеса Vrad в диапазон опорной скорости Vref. В течение фазы 9 компьютер определяет, что выполняются следующие условия: понижение давления имеет место уже в течение достаточного времени, а именно дольше, чем предопределенное значение, например 50 мс. Это означает, что фазы 6-8 совместно длятся более 50 мс; колесо снова стало нестабильным после короткого периода подъема давления, т.е. фаза 5 была короче фаз 6, 7 и 8, вместе взятых; обновленное ускорение в непосредственно предшествующей фазе 8 было меньше предопределенной величины, например 5g.
В фазе 9 имеет место дальнейшее понижение давления, так как выполняются все три вышеупомянутых условия.
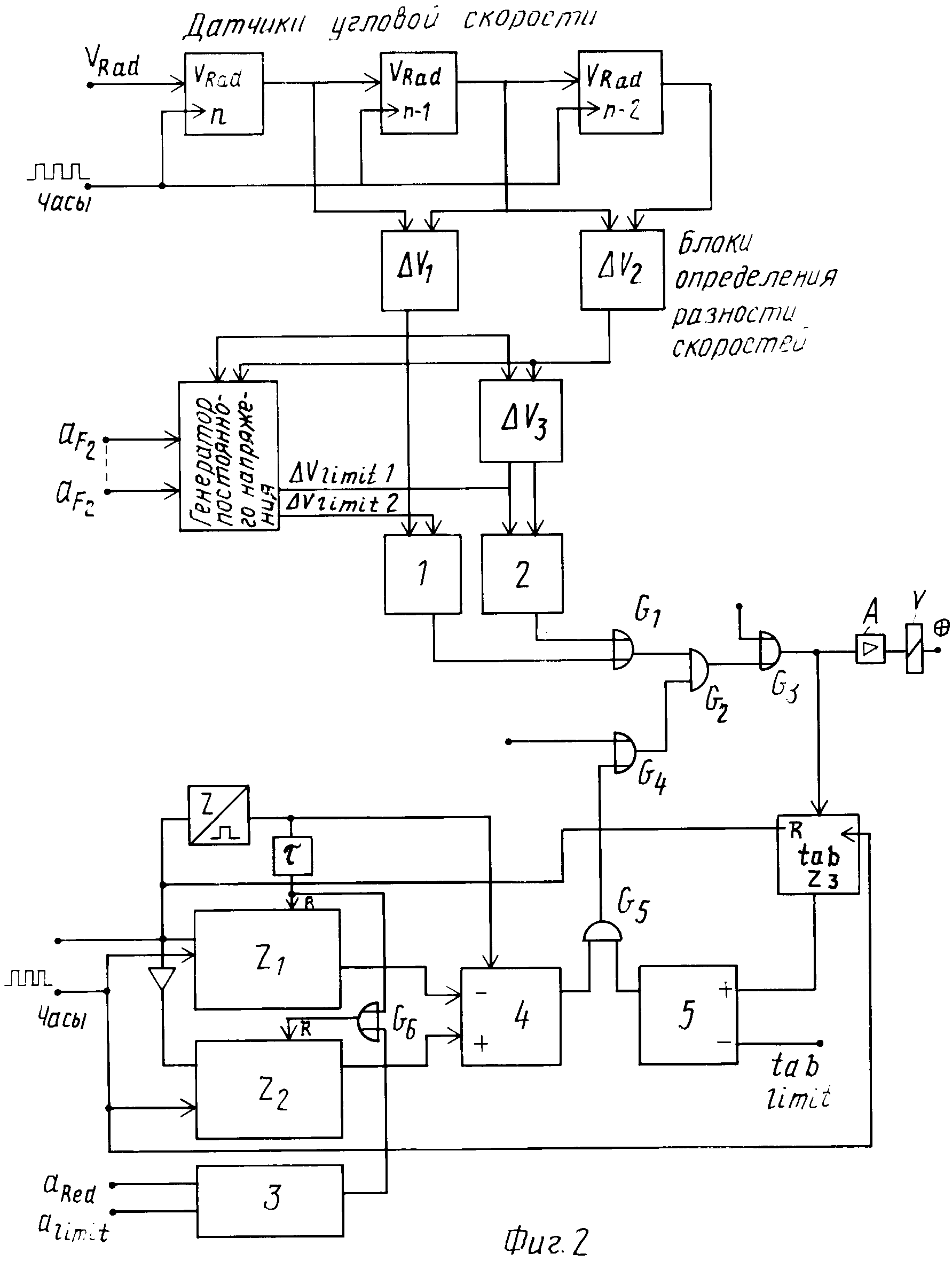
Один цикл вычислений соответствует каждому вышеупомянутому временному интервалу, например 10 мс. В каждый цикл вычислений запоминается окружная скорость колеса (как показано на верхней части фиг. 2). Для интервала n это окружная скорость колеса Vradn, для интервала n-1 - это окружная скорость колеса Vradn-1 и для мгновенного временного интервала - это окружная скорость колеса Vradn-2. Таким образом, на выходах функциональных блоков Δ V1 и Δ V2 имеется разность скоростей для двух последовательных временных интервалов. Поскольку цикл или такт, например 10 мс, представляет фиксированное предопределенное значение, разность скоростей также обеспечивает прямое измерение ускорения или замедления тормозящегося колеса.
Таким образом, на выходе схемы формирования разности можно считывать изменение ускорения или замедления.
В случае, когда окружное замедление больше данного предельного значения ΔVlimit или ускорение меньше этого порога, на выходе компьютера 1 появится сигнал 1. Если уменьшение замедления (или увеличение ускорения) меньше предопределенного значения ΔVlimit2, выходной сигнал компаратора 2 аналогично будет равен 1. Значения ΔVlimit1 и Δ Vlimit2 вырабатываются в генераторе величин сравнения и зависят от того, теряет ли колесо скорость или выбирает ее. Кроме того, эти значения можно сделать зависимыми от скорости автомобиля VF2 и его ускорения aFZ. Зависимости для соответствующего автомобиля определяются специалистом в данной области.
Выходные сигналы компараторов 1 и 2 объединяются схемой или G1 и управляют через схему G3 усилителем А и клапаном понижения давления V, если на втором входе схемы G2 также приложен сигнал 1. Этот сигнал 1 появляется тогда, когда есть сигнал на первом входе схемы G4 в случае достаточного проскальзывания или если имеется сигнал 1 на выходе схемы G5. Чтобы получить этот сигнал 1, должны быть выполнены следующие условия. Пока тормозящееся колесо вращается в нестабильном режиме (в результате, как само по себе известно, проскальзывания) счетчик Z2 считает в прямом направлении фиксированные тактовые импульсы. С другой стороны, если колесо вращается в стабильном режиме, счетчик Z1 считает в прямом направлении фиксированные тактовые импульсы. При переходе из стабильного режима в нестабильный режим дифференциатор D генерирует импульс, и отсчеты обоих счетчиков вводятся в компаратор 4. После определенной задержки оба счетчика счищаются и, таким образом, готовы для следующих отсчетов. Если фаза нестабильности была длиннее фазы стабильности, сигнал 1 на выходе компаратора не появляется. При больших окружных ускорениях колеса, т.е. при аrad > alimit компаратор 3 выдает сигнал 1, который через схему G6 очищает счетчик Z2. В результате время нестабильности, накопленное до этих пор при больших значения повторного ускорения, будет ликвидировано, и, как следствие, временной интервал стабильности будет обычно больше. Другими словами, на выходе компаратора 4 появится сигнал 0. Хотя если на выходе имеется сигнал 1 и если компаратор 5 аналогично выдает сигнал 1 из-за того, что время понижения давления, определенное счетчиком Z3, уже больше заданной сравниваемой величины tab limit, на выходе схемы G5 также будет сигнал 1 и сигналы понижения давления, управляемые выходом схемы G1, станут действовать без какого-либо проскальзывания колеса, к которому приложено торможение.
Реферат
Использование: в автомобильных тормозных системах. Сущность изобретения: способ регулирования тормозного давления в автомобильной тормозной системе плавного действия, когда при инициировании тормозного действия после каждого определенного временного интервала определяется замедление вращения тормозящего колеса и сравнивается с замедлением вращения, измеренным в течение предыдущего временного интервала, и по результату сравнения выполняется изменение тормозного давления. 5 з.п. ф-лы, 2 ил.
Комментарии