Устройство управления транспортным средством - RU2674643C1
Код документа: RU2674643C1
Чертежи
Описание
Уровень техники
1. Область техники, к которой относится изобретение
Варианты осуществления настоящего изобретения относятся к устройству управления транспортным средством.
2. Уровень техники
Для этого типа устройства, например, предложено устройство, выполненное с возможностью формировать момент относительно вертикальной оси в направлении недопущения выезда за пределы полосы движения посредством использования разности тормозных сил между левыми и правыми колесами, если рассматриваемое транспортное средство близко к тому, чтобы выезжать за пределы или отклоняться от полосы движения (см. выложенную заявку на патент (Япония) № 2006-282168).
В вышеуказанном предшествующем уровне техники, транспортное средство совершает вращательное перемещение (т.е. перемещение относительно вертикальной оси) в направлении недопущения выезда за пределы полосы движения. Это приводит к разности между направлением движения транспортного средства и направлением прохождения полосы движения. Ввиду этого, желательно, чтобы положение транспортного средства автоматически корректировалось так, чтобы обеспечивать соответствие направления движения транспортного средства с направлением прохождения полосы движения после недопущения выезда за пределы полосы движения (т.е. чтобы подавлять второй выезд за пределы полосы движения). Здесь, если момент относительно вертикальной оси на основе разности тормозных сил между левыми и правыми колесами прикладывается к транспортному средству, чтобы обеспечивать поворот транспортного средства в противоположном направлении по отношению к направлению недопущения выезда за пределы полосы движения, водитель возможно ощущает дискомфорт в зависимости от того, как прикладывать тормозную силу к колесам, что является технически проблематичным.
Идентичная техническая проблема может возникать не только в устройстве, выполненном с возможностью не допускать выезда за пределы полосы движения посредством приложения момента относительно вертикальной оси на основе разности тормозных сил между левыми и правыми колесами, но также и во всех устройствах, выполненных с возможностью прикладывать момент относительно вертикальной оси на основе разности тормозных сил между левыми и правыми колесами.
Сущность изобретения
С учетом вышеуказанной проблемы, следовательно, цель вариантов осуществления настоящего изобретения заключается в том, чтобы предоставлять устройство управления транспортным средством, выполненное с возможностью подавлять дискомфорт водителя, когда транспортное средство поворачивает в одном направлении посредством использования разности тормозных сил между левыми и правыми колесами, и сразу после этого транспортное средство поворачивает в другом направлении.
Вышеуказанная цель вариантов осуществления настоящего изобретения может достигаться посредством устройства управления транспортным средством в транспортном средстве, включающего в себя тормозное устройство, выполненное с возможностью прикладывать тормозную силу, соответствующую давлению тормозной жидкости, к каждому из множества колес, упомянутое устройство управления транспортным средством содержит: контроллер, выполненный с возможностью (i) задавать первое давление тормозной жидкости, ассоциированное с колесами на одной из левой и правой сторон из множества колес, так, что оно выше второго давления тормозной жидкости, ассоциированного с колесами на другой стороне, чтобы обеспечивать поворот транспортного средства в одном направлении, и выполненный с возможностью (ii) затем увеличивать второе давление тормозной жидкости посредством использования разности давлений жидкости между первым давлением тормозной жидкости и вторым давлением тормозной жидкости, и (iii) задавать первое давление тормозной жидкости так, что оно ниже второго давления тормозной жидкости при поддержании второго давления тормозной жидкости, чтобы обеспечивать поворот транспортного средства в другом направлении, которое отличается от упомянутого одного направления.
Замедление (или тормозная сила) в продольном направлении транспортного средства, увеличивается, уменьшается, увеличивается и уменьшается, если тормозная сила, прикладываемая к колесам на одной из левой и правой сторон, задается выше тормозной силы, прикладываемой к колесам на другой стороне, чтобы обеспечивать поворот транспортного средства в одном направлении, и приложение тормозной силы затем временно прекращается, и если тормозная сила, прикладываемая к колесам на другой стороне, снова задается более высокой, чем тормозная сила, прикладываемая к одной стороне, чтобы обеспечивать поворот транспортного средства в другом направлении, и приложение тормозной силы затем прекращается. В таком случае водитель возможно ощущает так называемую кратковременную потерю чувства торможения и дискомфорт.
Согласно устройству управления транспортным средством, первое давление тормозной жидкости, ассоциированное с колесами на одной из левой и правой сторон, задается выше второго давления тормозной жидкости, ассоциированного с колесами на другой стороне, и после этого второе давление тормозной жидкости увеличивается посредством использования разности давлений жидкости между первым давлением тормозной жидкости и вторым давлением тормозной жидкости. Другими словами, уменьшение первого давления тормозной жидкости и увеличение второго давления тормозной жидкости выполняются параллельно. Замедление в продольном направлении транспортного средства практически не изменяется в период, в который второе давление тормозной жидкости увеличивается посредством использования разности давлений жидкости. После того, как второе давление тормозной жидкости увеличивается, первое давление тормозной жидкости уменьшается, в то время как второе давление тормозной жидкости поддерживается. Замедление в продольном направлении транспортного средства за счет этого монотонно снижается. Следовательно, можно подавлять дискомфорт водителя и т.п., вызываемый посредством изменения замедления.
В устройстве управления транспортным средством, как описано выше, уменьшение первого давления тормозной жидкости и увеличение второго давления тормозной жидкости выполняются параллельно. Здесь, давление тормозной жидкости уменьшается через соленоидный клапан для снижения давления, который обычно представляет собой соленоидный клапан регулирования рабочей нагрузки. Соленоидный клапан регулирования рабочей нагрузки имеет относительно громкий шум при работе. Тем не менее, в настоящем изобретении, второе давление тормозной жидкости увеличивается посредством разности давлений жидкости между первым давлением тормозной жидкости и вторым давлением тормозной жидкости. Другими словами, в настоящем изобретении, тормозной механизм (например, колесный тормозной цилиндр) для колес на одной из левой и правой сторон сообщается с тормозным механизмом для колес на другой стороне без прохождения через соленоидный клапан для снижения давления. Как результат, второе давление тормозной жидкости увеличивается, в то время как первое давление тормозной жидкости снижается. В устройстве управления транспортным средством, первое давление тормозной жидкости не уменьшается через соленоидный клапан для снижения давления, и ввиду этого можно не допускать формирования шума при работе соленоидного клапана для снижения давления.
Как результат, согласно устройству управления транспортным средством, можно подавлять дискомфорт водителя, когда транспортное средство поворачивает в одном направлении посредством использования разности тормозных сил между левыми и правыми колесами, и сразу после этого транспортное средство поворачивает в другом направлении.
Примеры, в которых транспортное средство поворачивает в одном направлении посредством использования разности тормозных сил между левыми и правыми колесами, и сразу после этого транспортное средство поворачивает в другом направлении, являются следующими: (i) транспортное средство возвращается в целевую позицию в полосе движения (например, в центр полосы движения) после недопущения выезда транспортного средства за пределы полосы движения; (ii) транспортное средство возвращается в целевую позицию, если позиция транспортного средства в направлении ширины полосы движения сдвигается из целевой позиции вследствие бокового ветра (так называемое управление для компенсации бокового ветра); и (iii) избежание опасности в виде едущего впереди транспортного средства или помехи.
В одном аспекте устройства управления транспортным средством согласно вариантам осуществления настоящего изобретения,<пункт 2 формулы изобретения>
В устройстве управления транспортным средством, второе давление тормозной жидкости увеличивается посредством использования разности давлений жидкости между первым давлением тормозной жидкости и вторым давлением тормозной жидкости в предварительно определенный период от начального момента времени снижения давления, в который первое давление тормозной жидкости является относительно высоким. Другими словами, первое давление тормозной жидкости не уменьшается через соленоидный клапан для снижения давления, выполненный с возможностью уменьшать первое давление тормозной жидкости в предварительно определенный период от начального времени снижения давления.
Здесь, соленоидный клапан для снижения давления имеет более громкий шум при работе по мере того, как увеличивается давление тормозной жидкости; а именно, соленоидный клапан для снижения давления имеет меньший шум при работе по мере того, как снижается давление тормозной жидкости. Согласно этому аспекту, первое давление тормозной жидкости не уменьшается через соленоидный клапан для снижения давления (т.е. соленоидный клапан для снижения давления не работает), в предварительно определенный период от начального времени снижения давления, в которое первое давление тормозной жидкости является относительно высоким. Ввиду этого можно подавлять формирование шума при работе соленоидного клапана для снижения давления.
После того, как второе давление тормозной жидкости увеличивается, если первое давление тормозной жидкости задается ниже второго давления тормозной жидкости, то первое давление тормозной жидкости может уменьшаться через соленоидный клапан для снижения давления, выполненный с возможностью уменьшать первое давление тормозной жидкости. В этом случае, первое давление тормозной жидкости является относительно низким, и ввиду этого соленоидный клапан для снижения давления имеет меньший шум при работе, чем тогда, когда первое давление тормозной жидкости уменьшается через соленоидный клапан для снижения давления сразу после начала уменьшения первого давления тормозной жидкости, и водитель с меньшей вероятностью ощущает дискомфорт вследствие шума при работе.
"Предварительно определенный период" представляет собой период, в который второе давление тормозной жидкости увеличивается посредством использования разности давлений жидкости между первым давлением тормозной жидкости и вторым давлением тормозной жидкости. Второе давление тормозной жидкости увеличивается более быстро по мере того, как период становится короче. Тем не менее, по мере того, как период становится короче, например, момент относительно вертикальной оси транспортного средства, замедление в продольном направлении и т.п. внезапно изменяется, и водитель ввиду этого возможно ощущает дискомфорт. Следовательно, желательно, чтобы "предварительно определенный период" задавался в качестве периода, в который может поддерживаться баланс между скоростью для увеличения второго давления тормозной жидкости и темпом изменения момента относительно вертикальной оси и замедления и т.п., который не вызывает дискомфорт у водителя. При этой настройке, может более подавляться дискомфорт водителя. "Предварительно определенное давление жидкости" означает давление жидкости, которое обеспечивает возможность формирования тормозной силы, которая должна прикладываться к колесам на одной из левой и правой сторон, чтобы обеспечивать поворот транспортного средства в одном направлении.
В другом аспекте устройства управления транспортным средством согласно вариантам осуществления настоящего изобретения, тормозное устройство включает в себя: насос, выполненный с возможностью формировать давление тормозной жидкости, первый тормозной механизм, выполненный с возможностью прикладывать тормозную силу, соответствующую первому давлению тормозной жидкости, к колесам на одной из левой и правой сторон; второй тормозной механизм, выполненный с возможностью прикладывать тормозную силу, соответствующую второму давлению тормозной жидкости, к колесам на другой стороне; первый обратный соленоидный клапан, выполненный с возможностью обеспечивать сообщение выпускного порта насоса с первым тормозным механизмом, когда он открыт; второй обратный соленоидный клапан, выполненный с возможностью обеспечивать сообщение выпускного порта со вторым тормозным механизмом, когда он открыт; первый канал для жидкости, который соединяет сторону выпускного порта первого обратного соленоидного клапана и сторону выпускного порта второго обратного соленоидного клапана; и соленоидный клапан отсекания главного цилиндра, расположенный во втором канале для жидкости, который соединяет всасывающий порт насоса и первый канал для жидкости, и упомянутый контроллер выполнен с возможностью (i) открывать первый обратный соленоидный клапан и закрывать второй обратный соленоидный клапан и соленоидный клапан отсекания главного цилиндра в период, в который первое давление тормозной жидкости задается выше второго давления тормозной жидкости, (ii) открывать первый обратный соленоидный клапан и второй обратный соленоидный клапан, за счет этого обеспечивая сообщение первого тормозного механизма со вторым тормозным механизмом через первый канал для жидкости, и закрывать соленоидный клапан отсекания главного цилиндра в период, в который второе давление тормозной жидкости увеличивается посредством использования разности давлений жидкости, и (iii) закрывать второй обратный соленоидный клапан и открывать первый обратный соленоидный клапан и соленоидный клапан отсекания главного цилиндра, за счет этого обеспечивая сообщение первого тормозного механизма со всасывающим портом, в период, в который первое давление тормозной жидкости задается ниже второго давления тормозной жидкости.
Согласно этому аспекту, первое давление тормозной жидкости уменьшается без прохождения через соленоидный клапан для снижения давления, выполненный с возможностью уменьшать первое давление тормозной жидкости. Ввиду этого можно не допускать формирования шума при работе соленоидного клапана для снижения давления.
В другом аспекте устройства управления транспортным средством согласно вариантам осуществления настоящего изобретения, упомянутый контроллер выполнен с возможностью задавать первое давление тормозной жидкости так, что оно выше второго давления тормозной жидкости, таким образом, что момент относительно вертикальной оси формируется в упомянутом одном направлении, чтобы не допускать выезда транспортного средства за допустимые пределы, если имеется вероятность того, что транспортное средство выезжает за пределы полосы движения, по которой в данный момент движется транспортное средство.
Согласно этому аспекту, можно подавлять выезд транспортного средства за пределы полосы движения при подавлении дискомфорта водителя.
Характер, полезность и дополнительные признаки этого изобретения должны становиться более очевидными из нижеприведенного подробного описания со ссылкой на предпочтительные варианты осуществления изобретения при прочтении в сочетании с прилагаемыми чертежами, кратко описанными ниже.
Краткое описание чертежей
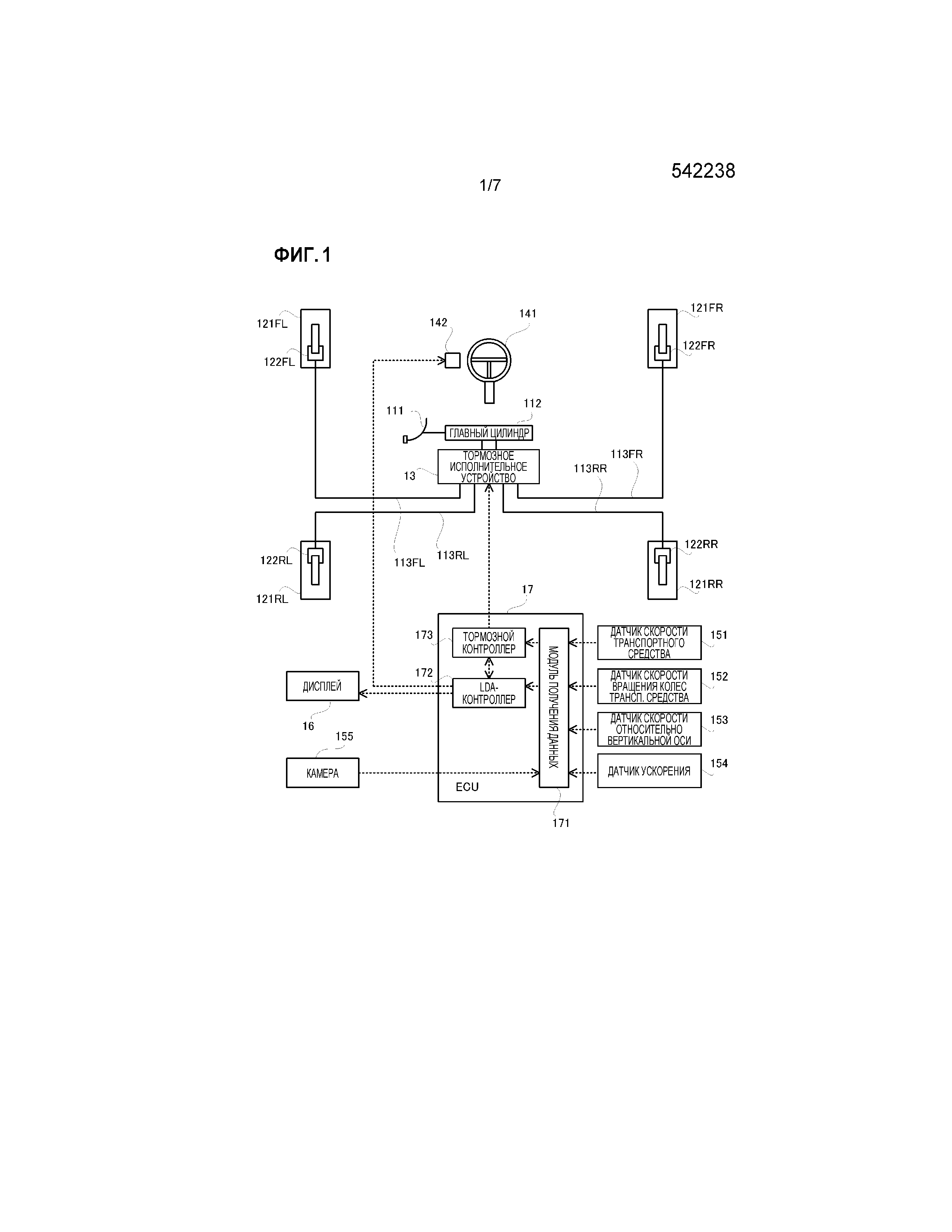
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию транспортного средства согласно варианту осуществления;
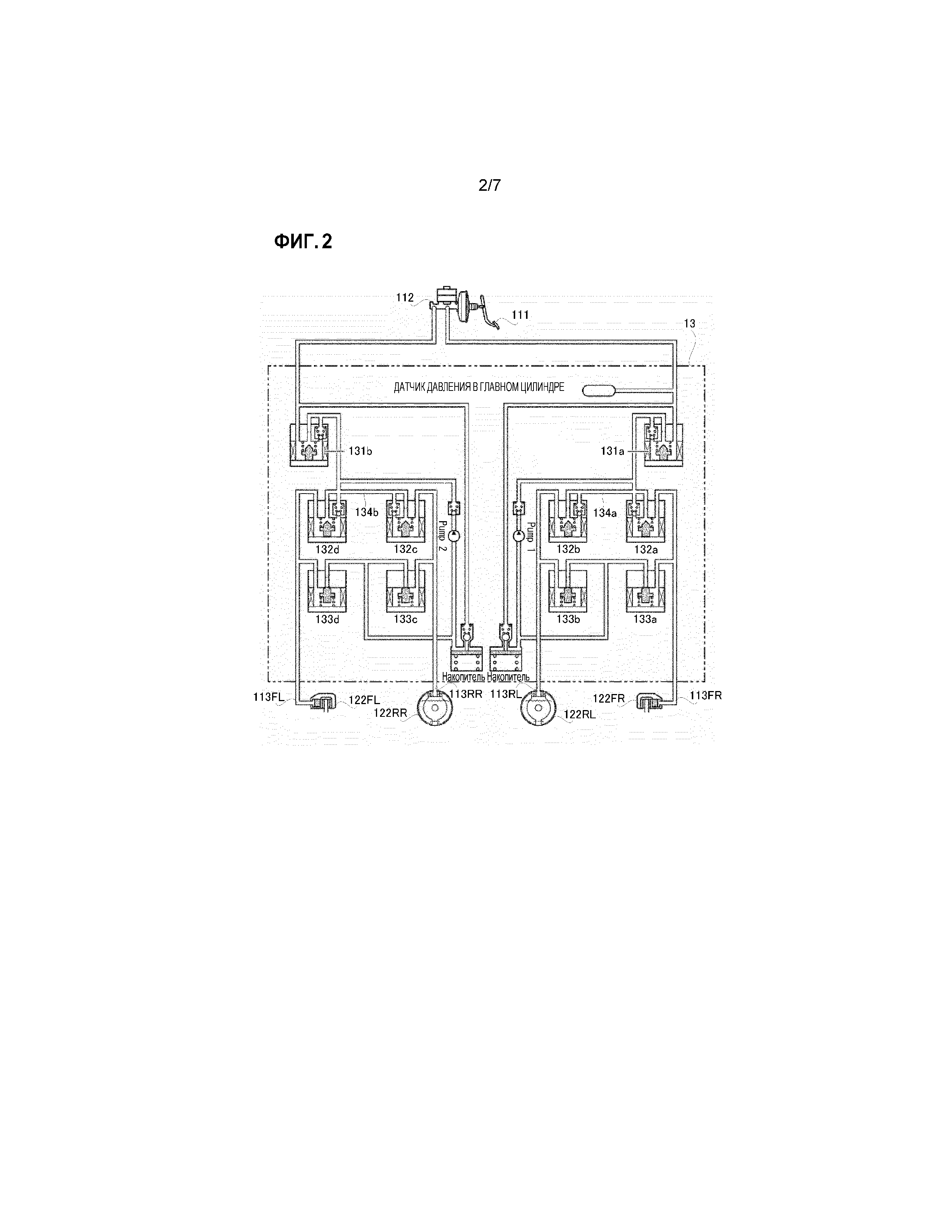
Фиг. 2 является принципиальной схемой, иллюстрирующей конструкцию тормозного исполнительного устройства согласно варианту осуществления;
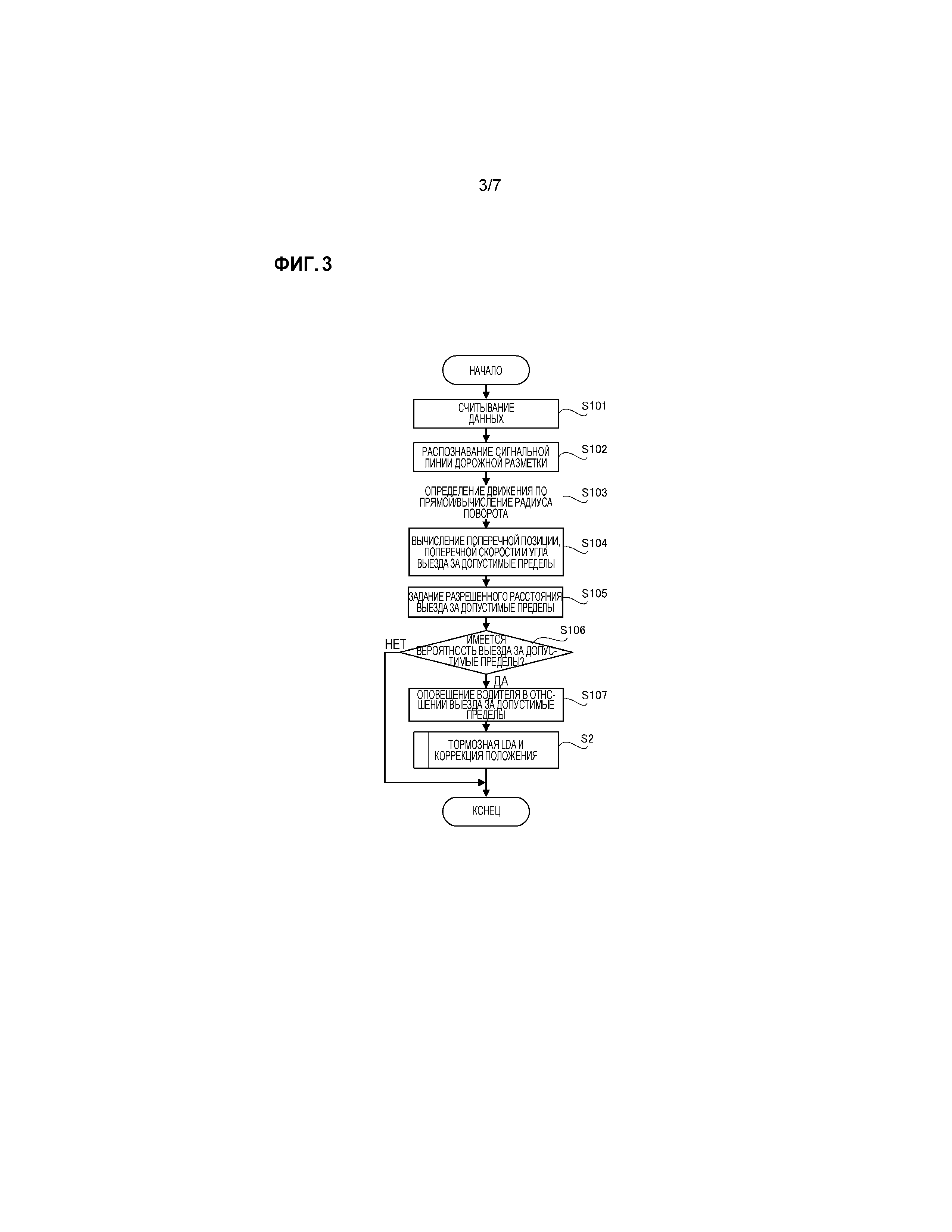
Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей операцию подавления выезда за пределы полосы движения согласно варианту осуществления;
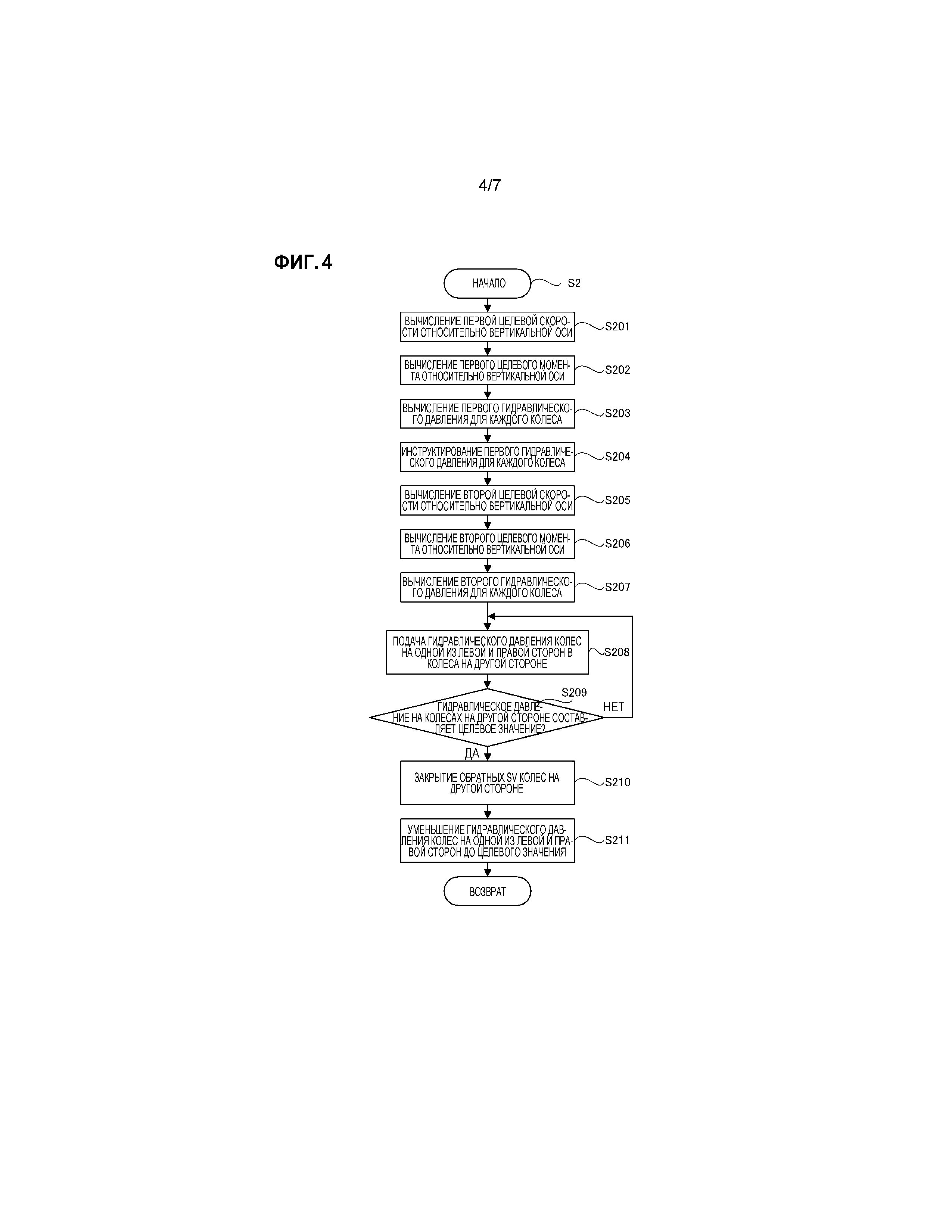
Фиг. 4 является блок-схемой последовательности операций способа, иллюстрирующей конкретный процесс тормозной LDA и коррекции положения транспортного средства согласно варианту осуществления;
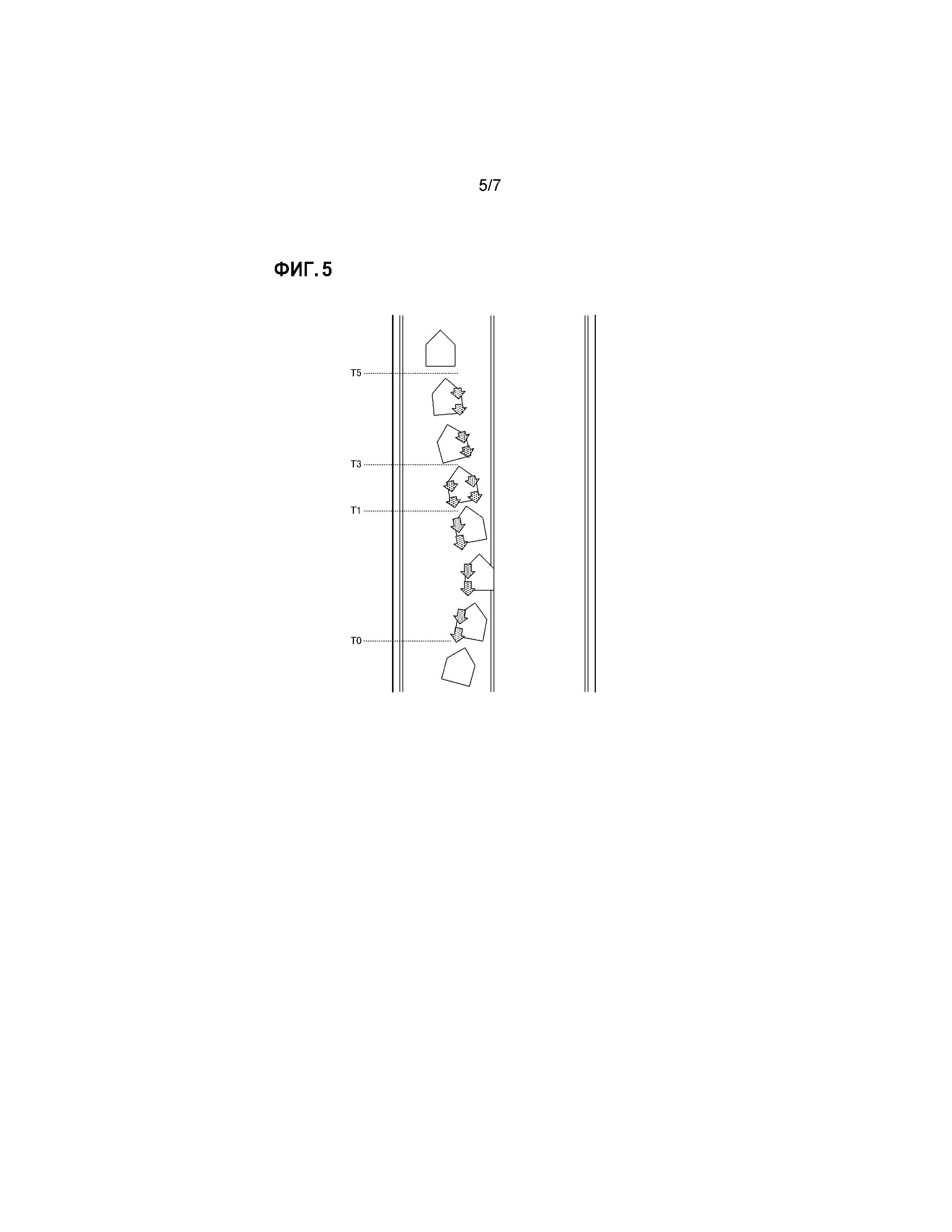
Фиг. 5 является концептуальной схемой, иллюстрирующей один пример тормозной силы, прикладываемой к транспортному средству при реализации операции подавления выезда за пределы полосы движения, и один пример проезжаемого пути транспортного средства;
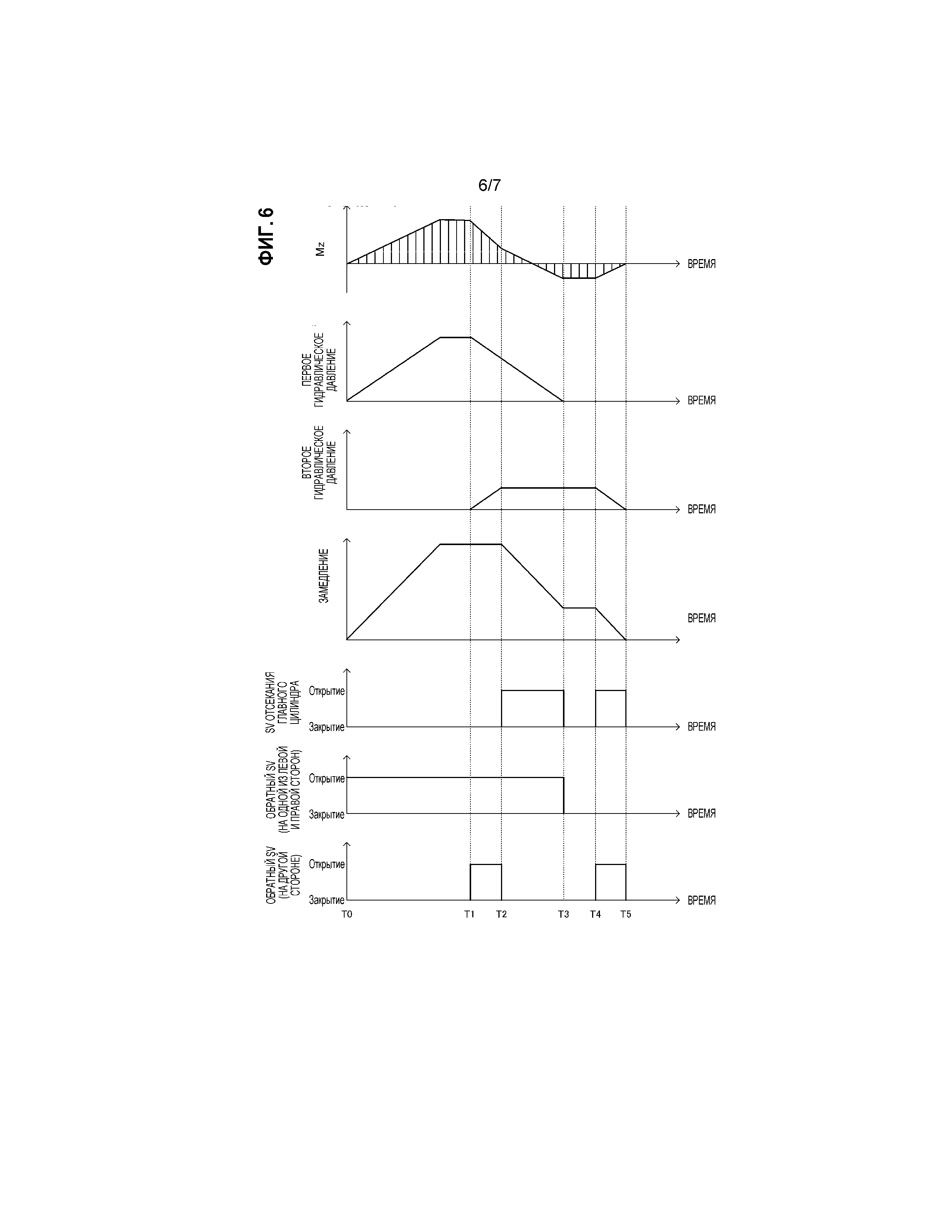
Фиг. 6 является временной диаграммой, иллюстрирующей момент относительно вертикальной оси, гидравлическое давление, замедление и открытое/закрытое состояние каждого клапана при реализации операции подавления выезда за пределы полосы движения согласно варианту осуществления; и
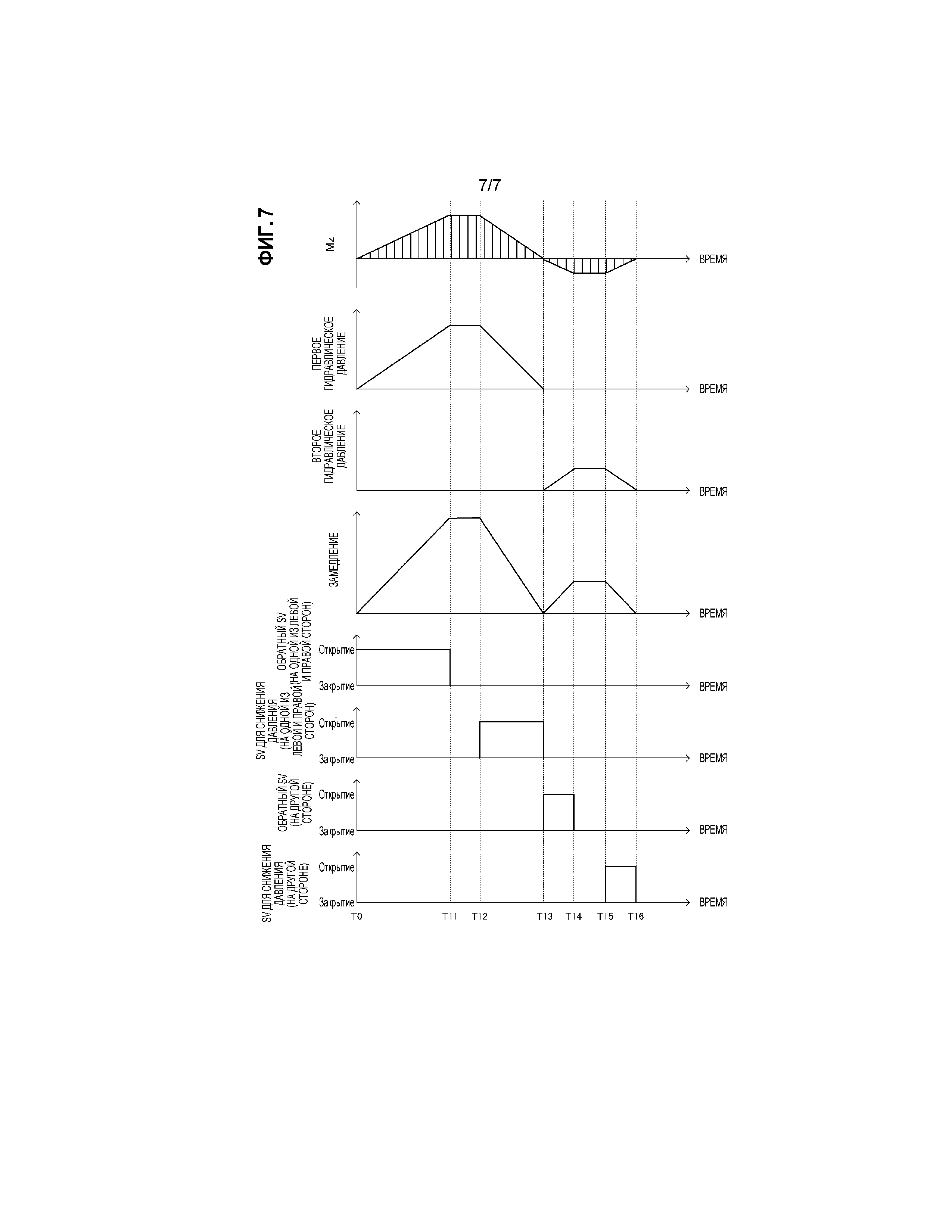
Фиг. 7 является временной диаграммой, иллюстрирующей момент относительно вертикальной оси, гидравлическое давление, замедление и открытое/закрытое состояние каждого клапана при реализации операции подавления выезда за пределы полосы движения согласно сравнительному примеру.
Подробное описание предпочтительных вариантов осуществления
Ниже поясняется устройство управления транспортным средством согласно варианту осуществления настоящего изобретения со ссылкой на фиг. 1-7. В нижеприведенном варианте осуществления, транспортное средство 1, оснащенное устройством управления транспортным средством согласно вариантам осуществления настоящего изобретения, используется для пояснения.
Конфигурация транспортного средства
Ниже поясняется конфигурация транспортного средства 1 со ссылкой на фиг. 1. Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию транспортного средства 1 согласно варианту осуществления.
На фиг. 1, транспортное средство 1 содержит педаль 111 тормоза, главный цилиндр 112, тормозное исполнительное устройство 13, колесный тормозной цилиндр 122FL, предоставленный на переднем левом колесе 121FL, колесный тормозной цилиндр 122RL, предоставленный на заднем левом колесе 121RL, колесный тормозной цилиндр 122FR, предоставленный на переднем правом колесе 121FR, колесный тормозной цилиндр 122RR, предоставленный на заднем правом колесе 121RR, и тормозные магистрали 113FL, 113RL, 113FR и 113RR.
Транспортное средство 1 дополнительно содержит руль 141, вибрационное исполнительное устройство 142, датчик 151 скорости транспортного средства, датчик 152 скорости вращения колес транспортного средства, датчик 153 скорости относительно вертикальной оси, датчик 154 ускорения, камеру 155, дисплей 16 и электронный модуль 17 управления (ECU), который является одним конкретным примером "устройства управления транспортным средством" согласно вариантам осуществления настоящего изобретения.
Главный цилиндр 112 выполнен с возможностью регулировать давление тормозной жидкости (или любой жидкости) в главном цилиндре 112 в соответствии с величиной нажатия педали 111 тормоза. Давление тормозной жидкости в главном цилиндре 112 (в дальнейшем называемое "гидравлическим давлением" при необходимости) передается в колесные тормозные цилиндры 122FL, 122RL, 122FR и 122RR через тормозные магистрали 113FL, 113RL, 113FR и 113RR, соответственно. Как результат, тормозная сила, соответствующая давлению тормозной жидкости, передаваемому в колесные тормозные цилиндры 122FL, 122RL, 122FR и 122RR, прикладывается к переднему левому колесу 121FL, заднему левому колесу 121RL, переднему правому колесу 121FR и заднему правому колесу 121RR, соответственно.
Тормозное исполнительное устройство 13 выполнено с возможностью регулировать гидравлическое давление, передаваемое в каждый из колесных тормозных цилиндров 122FL, 122RL, 122FR и 122RR, независимо от величины нажатия педали 111 тормоза, под управлением ECU 17. Следовательно, тормозное исполнительное устройство 13 выполнено с возможностью регулировать тормозную силу, прикладываемую к каждому из переднего левого колеса 121FL, заднего левого колеса 121RL, переднего правого колеса 121FR и заднего правого колеса 121RR, независимо от величины нажатия педали 111 тормоза.
Руль 141 представляет собой средство управления, управляемое водителем, чтобы рулить транспортным средством 1 (т.е. чтобы поворачивать руль). Вибрационное исполнительное устройство 142 выполнено с возможностью вызывать вибрацию в руле 141, под управлением ECU 17.
ECU 17 выполнен с возможностью управлять общей работой транспортного средства 1. В частности, в варианте осуществления, ECU 17 выполнен с возможностью осуществлять операцию подавления выезда за пределы полосы движения для подавления выезда за пределы или отклонения транспортного средства 1 от полосы движения, по которой в данный момент движется транспортное средство 1. Другими словами, ECU 17 выступает в качестве устройства управления для реализации так называемой LDA (системы оповещения о выезде за пределы полосы движения) или LDP (системы недопущения выезда за пределы полосы движения).
Чтобы выполнять операцию подавления выезда за пределы полосы движения, ECU 17 содержит модуль 171 получения данных, LDA-контроллер 172 и тормозной контроллер 173, в качестве блоков обработки, логически реализованных, или схем обработки, физически реализованных в ECU 17.
Далее поясняется тормозное исполнительное устройство 13 со ссылкой на фиг. 2. Фиг. 2 является принципиальной схемой, иллюстрирующей конструкцию тормозного исполнительного устройства 13 согласно варианту осуществления.
Как проиллюстрировано на фиг. 2, два гидравлических тракта из главного цилиндра 112 разделяются на четыре тракта в тормозном исполнительном устройстве 13. Один из двух гидравлических трактов имеет соленоидный клапан 131a отсекания главного цилиндра (далее упоминаемый как "SV отсекания главного цилиндра" при необходимости), обратные соленоидные клапаны 132a и 132b (далее упоминаемые как "обратные SV" при необходимости) и соленоидные клапаны 133a и 133b для снижения давления (далее упоминаемые как "SV для снижения давления" при необходимости). Другой гидравлический тракт из двух гидравлических трактов имеет SV 131b отсекания главного цилиндра, обратные SV 132c и 132d и SV 133c и 133d для снижения давления.
Когда обратный SV 132a открыт, выпускной порт насоса 1 (т.е. сторона высокого давления) сообщается с колесным тормозным цилиндром 122FR. Когда обратный SV 132b открыт, выпускной порт насоса 1 сообщается с колесным тормозным цилиндром 122RL. Когда оба обратных SV 132a и 132b открыты, колесные тормозные цилиндры 122FR и 122RL сообщаются друг с другом через магистраль 134a.
Когда SV 133a для снижения давления открыт, колесный тормозной цилиндр 122FR сообщается со всасывающим портом насоса 1 (т.е. стороной низкого давления). Когда SV 133b для снижения давления открыт, колесный тормозной цилиндр 122RL сообщается со всасывающим портом насоса 1.
Когда SV 131a отсекания главного цилиндра открыт, выпускной порт насоса 1 сообщается со всасывающим портом насоса 1. Помимо этого, когда обратный SV 132a и SV 131a отсекания главного цилиндра открыты, колесный тормозной цилиндр 122FR сообщается со всасывающим портом насоса 1. Таким же образом, когда обратный SV 132b и SV 131a отсекания главного цилиндра открыты, колесный тормозной цилиндр 122RL сообщается со всасывающим портом насоса 1.
Когда гидравлическое давление колесного тормозного цилиндра 122FR увеличивается, обратный SV 132a открывается, и SV 133a для снижения давления закрывается. С другой стороны, когда гидравлическое давление колесного тормозного цилиндра 122FR уменьшается, обычно, обратный SV 132a закрывается, и SV 133a для снижения давления открывается. Таким же образом, когда гидравлическое давление колесного тормозного цилиндра 122RL увеличивается, обратный SV 132b открывается, и SV 133b для снижения давления закрывается. С другой стороны, когда гидравлическое давление колесного тормозного цилиндра 122RL уменьшается, обычно, обратный SV 132b закрывается, и SV 133b для снижения давления открывается.
Когда обратный SV 132c открыт, выпускной порт насоса 2 сообщается с колесным тормозным цилиндром 122RR. Когда обратный SV 132d открыт, выпускной порт насоса 2 сообщается с колесным тормозным цилиндром 122FL. Кроме того, когда оба обратных SV 132c и 132d открыты, колесные тормозные цилиндры 122RR и 122FL сообщаются друг с другом через магистраль 134b.
Когда обратный SV 133C открыт, колесный тормозной цилиндр 122RR сообщается со всасывающим портом насоса 2. Когда SV 133d для снижения давления открыт, колесный тормозной цилиндр 122FL сообщается со всасывающим портом насоса 2.
Когда SV 131b отсекания главного цилиндра открыт, выпускной порт насоса 2 сообщается со всасывающим портом насоса 2. Помимо этого, когда обратный SV 132c и SV 131b отсекания главного цилиндра открыты, колесный тормозной цилиндр 122RR сообщается со всасывающим портом насоса 2. Таким же образом, когда обратный SV 132d и SV 131b отсекания главного цилиндра открыты, колесный тормозной цилиндр 122FL сообщается со всасывающим портом насоса 2.
Когда гидравлическое давление колесного тормозного цилиндра 122RR увеличивается, обратный SV 132c открывается, и SV 133c для снижения давления закрывается. С другой стороны, когда гидравлическое давление колесного тормозного цилиндра 122RR уменьшается, обычно, обратный SV 132c закрывается, и SV 133c для снижения давления открывается. Таким же образом, когда гидравлическое давление колесного тормозного цилиндра 122FL увеличивается, обратный SV 132d открывается, и SV 133d для снижения давления закрывается. С другой стороны, когда гидравлическое давление колесного тормозного цилиндра 122FL уменьшается, обычно, обратный SV 132d закрывается, и SV 133d для снижения давления открывается.
SV 131a и 131b отсекания главного цилиндра и обратные SV 132a-132d представляют собой линейные соленоидные клапаны. С другой стороны, SV 133a-133d для снижения давления представляют собой соленоидные клапаны регулирования рабочей нагрузки.
Фиг. 2 иллюстрирует так называемую конструкцию на основе системы с X-разделением, имеющую: гидравлическую систему, включающую в себя колесный тормозной цилиндр 122FR переднего правого колеса 121FR и колесный тормозной цилиндр 122RL заднего левого колеса 121RL; и гидравлическую систему, включающую в себя колесный тормозной цилиндр 122FL переднего левого колеса 121FL и колесный тормозной цилиндр 122RR заднего правого колеса 121RR. Настоящее изобретение может применяться не только к так называемой конструкции на основе системы с X-разделением, но также и к так называемой конструкции на основе системы с разделением между передними и задними колесами, имеющей: гидравлическую систему, включающую в себя колесный тормозной цилиндр 122FL переднего левого колеса 121FL и колесный тормозной цилиндр 122FR переднего правого колеса 121FR; и гидравлическую систему, включающую в себя колесный тормозной цилиндр 122RL заднего левого колеса 121RL и колесный тормозной цилиндр 122RR заднего правого колеса 121RR.
Операция подавления выезда за пределы полосы движения
После этого поясняется операция подавления выезда за пределы полосы движения согласно варианту осуществления со ссылкой на блок-схемы последовательности операций способа на фиг. 3 и фиг. 4.
Краткий обзор операции подавления выезда за пределы полосы движения
LDA-контроллер 172 ECU 17 выполнен с возможностью определять то, имеется или нет вероятность того, что транспортное средство 1 выезжает за пределы полосы движения, по которой в данный момент движется транспортное средство 1, на основе определяемых данных, полученных посредством модуля 171 получения данных (т.е. данных, указывающих соответствующие результаты определения датчика 151 скорости транспортного средства, датчика 152 скорости вращения колес транспортного средства, датчика 153 скорости относительно вертикальной оси и датчика 154 ускорения), и данных изображений из камеры 155.
Если имеется вероятность выезда за пределы полосы движения, LDA-контроллер 172 выполнен с возможностью прикладывать тормозную силу к каждому из переднего левого колеса 121FL, заднего левого колеса 121RL, переднего правого колеса 121FR и заднего правого колеса 121RR, чтобы прикладывать к транспортному средству 1 момент относительно вертикальной оси для подавления, за счет которого может подавляться выезд за пределы полосы движения транспортного средства. Другими словами, в варианте осуществления, выезд транспортного средства 1 за пределы полосы движения подавляется посредством использования разности тормозных сил. В дальнейшем в этом документе, "подавление выезда за пределы полосы движения" согласно варианту осуществления упоминается как "тормозная LDA" при необходимости.
LDA-контроллер 172 выполнен с возможностью прикладывать к транспортному средству 1 момент относительно вертикальной оси в противоположном направлении по отношению к направлению момента относительно вертикальной оси для подавления, чтобы корректировать положение транспортного средства 1 (т.е. чтобы обеспечивать соответствие направления движения транспортного средства 1 с направлением прохождения полосы движения) после приложения момента относительно вертикальной оси для подавления к транспортному средству 1.
Здесь, выражение "подавлять выезд транспортного средства 1 за допустимые пределы" означает уменьшать расстояние выезда за пределы полосы движения, когда момент относительно вертикальной оси для подавления прикладывается к транспортному средству 1, по сравнению с расстоянием выезда за пределы полосы движения, когда момент относительно вертикальной оси для подавления не прикладывается к транспортному средству 1.
Подробности операции подавления выезда за пределы полосы движения
На фиг. 3, во-первых, модуль 171 получения данных получает определяемые данные, указывающие соответствующие результаты определения датчика 151 скорости транспортного средства, датчика 152 скорости вращения колес транспортного средства, датчика 153 скорости относительно вертикальной оси и датчика 154 ускорения), и данные изображений, указывающие изображения, снятые посредством камеры 155 (этап S101).
LDA-контроллер 172 анализирует данные изображений, полученные в процессе этапа S101, за счет этого указывая край полосы движения для полосы движения, по которой в данный момент движется транспортное средство 1 (или "сигнальную линию дорожной разметки", примерно проиллюстрированную в варианте осуществления в качестве одного примера края полосы движения), в изображениях, снятых посредством камеры 155 (этап S102).
LDA-контроллер 172 определяет то, является полоса движения, по которой в данный момент движется транспортное средство 1, прямой полосой движения или кривой, на основе сигнальной линии дорожной разметки, указываемой в процессе этапа S102, и вычисляет радиус кривизны полосы движения, если полоса движения определяется как кривая (этап S103). Радиус кривизны полосы движения является практически эквивалентным радиусу кривизны сигнальной линии дорожной разметки. Таким образом, LDA-контроллер 172 может вычислять радиус кривизны сигнальной линии дорожной разметки, указываемой в процессе этапа S102, и может обрабатывать вычисленный радиус кривизны в качестве радиуса кривизны полосы движения.
LDA-контроллер 172 дополнительно вычисляет текущую поперечную позицию, текущую поперечную скорость и текущий угол выезда транспортного средства 1 за допустимые пределы, на основе сигнальной линии дорожной разметки, указываемой в процессе этапа S102 (этап S104). Здесь, "поперечная позиция" означает расстояние от центра полосы движения до транспортного средства 1 (или обычно расстояние до центра транспортного средства 1) в направлении ширины полосы движения, ортогональном к направлению, в котором протягивается полоса движения (или направлению прохождения полосы движения). "Поперечная скорость" означает скорость транспортного средства 1 в направлении ширины полосы движения. "Угол выезда за допустимые пределы" означает угол между полосой движения и осью в продольном направлении транспортного средства 1 (т.е. угол между сигнальной линией дорожной разметки и осью в продольном направлении транспортного средства 1).
LDA-контроллер 172 дополнительно задает разрешенное расстояние выезда за допустимые пределы (этап S105). Разрешенное расстояние выезда за допустимые пределы указывает разрешенное максимальное значение расстояния выезда транспортного средства 1 за пределы полосы движения (т.е. расстояние выезда транспортного средства 1 за пределы сигнальной линии дорожной разметки), когда транспортное средство 1 выезжает за пределы полосы движения. Таким образом, операция подавления выезда за пределы полосы движения представляет собой операцию приложения момента относительно вертикальной оси для подавления к транспортному средству 1 так, что расстояние выезда транспортного средства 1 за пределы полосы движения находится в пределах разрешенного расстояния выезда за допустимые пределы.
Например, разрешенное расстояние выезда за допустимые пределы может задаваться следующим образом: а именно, LDA-контроллер 172 может задавать разрешенное расстояние выезда за допустимые пределы с точки зрения удовлетворения требований нормативных правовых актов (например, требований программы оценки новых автомобилей (NCAP)). Разрешенное расстояние выезда за допустимые пределы, заданное с этой точки зрения, может использоваться в качестве разрешенного расстояния выезда за допустимые пределы по умолчанию. Способ задания разрешенного расстояния выезда за допустимые пределы не ограничен этим примером.
Затем LDA-контроллер 172 определяет то, имеется или нет вероятность того, что транспортное средство 1 выезжает за пределы полосы движения, по которой в данный момент движется транспортное средство 1 (этап S106). В частности, например, LDA-контроллер 172 вычисляет будущую позицию (например, от нескольких до нескольких десятков секунд) транспортного средства 1 на основе текущей скорости, текущей поперечной позиции, текущей поперечной скорости и т.п. транспортного средства 1. Затем LDA-контроллер 172 определяет то, проезжает транспортное средство 1 через или находится на сигнальной линии дорожной разметки в будущей позиции либо нет. Если определено то, что транспортное средство 1 проезжает через или находится на сигнальной линии дорожной разметки в будущей позиции, LDA-контроллер 172 определяет то, что имеется вероятность того, что транспортное средство 1 выезжает за пределы полосы движения.
При определении на этапе S106, если определено то, что отсутствует вероятность того, что транспортное средство 1 выезжает за пределы полосы движения (этап S106: "Нет"), операция подавления выезда за пределы полосы движения, проиллюстрированная на фиг. 3, завершается. Затем LDA-контроллер 172 повторно начинает операцию подавления выезда за пределы полосы движения, проиллюстрированную на фиг. 3, после истечения первого предварительно определенного периода (например, от нескольких миллисекунд до нескольких десятков миллисекунд). Другими словами, операция подавления выезда за пределы полосы движения, проиллюстрированная на фиг. 3, повторяется с периодом, соответствующим первому предварительно определенному периоду.
С другой стороны, при определении на этапе S106, если определено то, что имеется вероятность того, что транспортное средство 1 выезжает за пределы полосы движения (этап S106: "Да"), LDA-контроллер 172 активирует флаг управления, ассоциированный с тормозной LDA, и оповещает водителя транспортного средства 1 в отношении вероятности выезда транспортного средства 1 за пределы полосы движения (этап S107). В частности, LDA-контроллер 172 управляет дисплеем 16, например, так, чтобы отображать изображения, указывающие вероятность выезда транспортного средства 1 за пределы полосы движения, и/или управляет вибрационным исполнительным устройством 142 так, чтобы сообщать водителю вероятность выезда транспортного средства 1 за пределы полосы движения посредством использования вибрации руля 141.
Если определено то, что имеется вероятность того, что транспортное средство 1 выезжает за пределы полосы движения, LDA-контроллер 172 дополнительно выполняет процесс, ассоциированный с тормозной LDA и коррекцией положения (этап S2). Этот процесс подробнее поясняется со ссылкой на блок-схему последовательности операций способа на фиг. 4.
LDA-контроллер 172, во-первых, вычисляет новый проезжаемый путь, по которому транспортное средство 1, которое движется в направлении от центра полосы движения, должно двигаться к центру полосы движения. В это время, вычисленный проезжаемый путь удовлетворяет ограничениям, налагаемым посредством разрешенного расстояния выезда за допустимые пределы, заданного на этапе S105.
Затем LDA-контроллер 172 вычисляет скорость относительно вертикальной оси, которая должна формироваться в транспортном средстве 1, чтобы не допускать выезда транспортного средства 1 за пределы полосы движения, в качестве первой целевой скорости относительно вертикальной оси (этап S201). После этого LDA-контроллер 172 вычисляет момент относительно вертикальной оси, который должен прикладываться к транспортному средству 1, чтобы формировать первую целевую скорость относительно вертикальной оси в транспортном средстве 1, в качестве первого целевого момента относительно вертикальной оси (этап S202).
Здесь, LDA-контроллер 172 может вычислять первый целевой момент относительно вертикальной оси посредством преобразования или перевода первой целевой скорости относительно вертикальной оси в первый целевой момент относительно вертикальной оси на основе предварительно определенной функции преобразования (и то же применимо ко второму целевому моменту относительно вертикальной оси, описанному ниже). Первый целевой момент относительно вертикальной оси является эквивалентным вышеуказанному моменту относительно вертикальной оси для подавления.
Затем LDA-контроллер 172 вычисляет тормозную силу, которая обеспечивает возможность приложения первого целевого момента относительно вертикальной оси к транспортному средству 1. В это время, LDA-контроллер 172 отдельно вычисляет тормозную силу, прикладываемую к каждому из переднего левого колеса 121FL, заднего левого колеса 121RL, переднего правого колеса 121FR и заднего правого колеса 121RR.
После этого тормозной контроллер 173 вычисляет значение команды управления давлением для указания первого гидравлического давления, требуемого для того, чтобы формировать тормозную силу, вычисленную посредством LDA-контроллера 172 (этап S203). В это время, тормозной контроллер 173 отдельно вычисляет значение команды управления давлением для указания гидравлического давления в каждом из колесных тормозных цилиндров 122FL, 122RL, 122FR и 122RR.
Затем тормозной контроллер 173 управляет тормозным исполнительным устройством 13 на основе значения команды управления давлением, вычисленного на этапе S203. Как результат, тормозная сила, соответствующая значению команды управления давлением, прикладывается, по меньшей мере, к одному из переднего левого колеса 121FL, заднего левого колеса 121RL, переднего правого колеса 121FR и заднего правого колеса 121RR (этап S204).
Затем LDA-контроллер 172 вычисляет скорость относительно вертикальной оси, которая должна формироваться в транспортном средстве 1, чтобы корректировать положение транспортного средства 1, в качестве второй целевой скорости относительно вертикальной оси (этап S205). После этого LDA-контроллер 172 вычисляет момент относительно вертикальной оси, который должен прикладываться к транспортному средству 1, чтобы формировать вторую целевую скорость относительно вертикальной оси в транспортном средстве 1, в качестве второго целевого момента относительно вертикальной оси (этап S206).
Затем LDA-контроллер 172 вычисляет тормозную силу, которая обеспечивает возможность приложения второго целевого момента относительно вертикальной оси к транспортному средству 1. В это время, LDA-контроллер 172 отдельно вычисляет тормозную силу, прикладываемую к каждому из переднего левого колеса 121FL, заднего левого колеса 121RL, переднего правого колеса 121FR и заднего правого колеса 121RR. После этого тормозной контроллер 173 вычисляет значение команды управления давлением для указания второго гидравлического давления, требуемого для того, чтобы формировать тормозную силу, вычисленную посредством LDA-контроллера 172 (этап S207).
Здесь, направление второго целевого момента относительно вертикальной оси противостоит направлению первого целевого момента относительно вертикальной оси (т.е. момента относительно вертикальной оси для подавления). Другими словами, если тормозная сила, ассоциированная с колесами на одной из левой и правой сторон транспортного средства 1, задается выше тормозной силы, ассоциированной с колесами на другой стороне, чтобы прикладывать первый целевой момент относительно вертикальной оси к транспортному средству 1, необходимо задавать тормозную силу, ассоциированную с колесами на другой стороне, так, что она выше тормозной силы, ассоциированной с колесами на одной стороне, чтобы прикладывать второй момент относительно вертикальной оси к транспортному средству 1.
Когда первый целевой момент относительно вертикальной оси прикладывается к транспортному средству 1, гидравлическое давление колесных тормозных цилиндров колес на одной из левой и правой сторон транспортного средства 1 выше гидравлического давления колесных тормозных цилиндров колес на другой стороне. Чтобы прикладывать второй целевой момент относительно вертикальной оси к транспортному средству 1 сразу после приложения первого целевого момента относительно вертикальной оси к транспортному средству 1, необходимо задавать гидравлическое давление колесных тормозных цилиндров колес на другой стороне так, что оно выше гидравлического давления колесных тормозных цилиндров колес на одной стороне.
Когда второй целевой момент относительно вертикальной оси прикладывается к транспортному средству 1, тормозной контроллер 173 использует гидравлическое давление колесных тормозных цилиндров колес на одной из левой и правой сторон транспортного средства 1 и управляет тормозным исполнительным устройством 13 так, чтобы увеличивать гидравлическое давление колесных тормозных цилиндров колес на другой стороне (этап S208).
Эта конфигурация может приспосабливаться, поскольку первый целевой момент относительно вертикальной оси для недопущения выезда транспортного средства 1 за пределы полосы движения всегда превышает второй целевой момент относительно вертикальной оси для коррекции положения транспортного средства 1. Другими словами, первое гидравлическое давление для приложения первого целевого момента относительно вертикальной оси к транспортному средству 1 всегда превышает второе гидравлическое давление для приложения второго целевого момента относительно вертикальной оси к транспортному средству 1.
После процесса на этапе S208, тормозной контроллер 173 определяет то, достигает или нет гидравлическое давление колесных тормозных цилиндров на другой стороне из левой и правой сторон транспортного средства 1 (которые представляют собой колесные тормозные цилиндры 122FR и 122RR в примере, проиллюстрированном на фиг. 5) значения команды управления давлением, вычисленного на этапе S207 (т.е. целевого значения) (этап S209). При определении, если определено то, что гидравлическое давление колесных тормозных цилиндров на другой стороне не достигает значения команды управления давлением (этап S209: "Нет"), процесс на этапе S208 продолжается.
С другой стороны, при определении на этапе S209, если определено то, что гидравлическое давление колесных тормозных цилиндров на другой стороне достигает значения команды управления давлением (этап S209: "Нет"), тормозной контроллер 173 управляет тормозным исполнительным устройством 13 так, чтобы закрывать обратные SV, ассоциированные с колесами на другой стороне, (которые представляют собой обратные SV 132a и 132c в примере, проиллюстрированном на фиг. 5) (этап S210).
Затем тормозной контроллер 173 управляет тормозным исполнительным устройством 13 так, чтобы открывать обратные SV, ассоциированные с колесами на одной из левой и правой сторон транспортного средства 1 (которые представляют собой обратные SV 132b и 132d в примере, проиллюстрированном на фиг. 5), и SV 131a и 131b отсекания главного цилиндра, чтобы задавать гидравлическое давление колесных тормозных цилиндров колес на одной стороне (которые представляют собой колесные тормозные цилиндры 122FL и 122RL в примере, проиллюстрированном на фиг. 5) равным значению команды управления давлением, вычисленному на этапе S207 (т.е. целевому значению) (этап S211). Как результат, тормозная сила, прикладываемая к колесам на одной стороне, становится меньше тормозной силы, прикладываемой к колесам на другой стороне, и второй целевой момент относительно вертикальной оси прикладывается к транспортному средству 1.
Посредством выполнения процесса, ассоциированного с тормозной LDA и коррекцией положения транспортного средства, проиллюстрированного на фиг. 4, транспортное средство 1 движется по новому проезжаемому пути, вычисленному на этапе S201. После процесса на этапе S211, флаг управления, ассоциированный с тормозной LDA, деактивируется, и операция подавления выезда за пределы полосы движения, проиллюстрированная на фиг. 3, завершается. Затем LDA-контроллер 172 повторно начинает операцию подавления выезда за пределы полосы движения, проиллюстрированную на фиг. 3, после истечения первого предварительно определенного периода.
Один пример пути транспортного средства посредством операции подавления выезда за пределы полосы движения
Ниже поясняется один конкретный пример пути транспортного средства 1 посредством реализации процесса, проиллюстрированного на фиг. 4, со ссылкой на фиг. 5. Фиг. 5 является концептуальной схемой, иллюстрирующей один пример тормозной силы, прикладываемой к транспортному средству при реализации операции подавления выезда за пределы полосы движения, и один пример проезжаемого пути транспортного средства. Заштрихованные стрелки на фиг. 5 представляют тормозную силу, прикладываемую к транспортному средству 1. Фиг. 5 является концептуальной схемой, и ввиду этого, например, соотношение абсолютных величин тормозной силы и т.п. не обязательно совпадает с фактическим соотношением. Ссылочные обозначения T0, T1, T3 и T5 на фиг. 5 указывают моменты времени и надлежащим образом соответствуют ссылочным обозначениям T0, T1, T3 и T5 на фиг. 6.
Здесь, приводится пояснение операции подавления выезда за пределы полосы движения, когда имеется вероятность того, что транспортное средство 1 выезжает за пределы полосы движения в правую сторону относительно направления движения. Когда процесс, проиллюстрированный на фиг. 4, выполняется, во-первых, первый целевой момент относительно вертикальной оси для подавления выезда транспортного средства 1 за допустимые пределы прикладывается к транспортному средству 1, и после этого второй целевой момент относительно вертикальной оси для коррекции положения транспортного средства 1 прикладывается к транспортному средству 1.
Как проиллюстрировано на фиг. 5, чтобы прикладывать первый целевой момент относительно вертикальной оси к транспортному средству 1, тормозная сила прикладывается к переднему левому колесу 121FL и заднему левому колесу 12RL (согласно процессу на этапе S204 на фиг. 4). В это время, тормозной контроллер 173 управляет тормозным исполнительным устройством 13 так, чтобы открывать обратные SV 132b и 132d при работе насоса 1 и насоса 2, при этом обратные SV 132a и 132c, SV 133a-133d для снижения давления и SV 131a и 131b отсекания главного цилиндра закрываются.
Посредством приложения первого целевого момента относительно вертикальной оси к транспортному средству 1, транспортное средство 1 поворачивает в левую сторону относительно направления движения и приближается к центру полосы движения (см. период от момента T0 времени до момента T1 времени на фиг. 5).
Затем чтобы прикладывать второй целевой момент относительно вертикальной оси к транспортному средству 1, тормозная сила прикладывается к переднему правому колесу FR и заднему правому колесу RR. В частности, на этапе S208 на фиг. 4, гидравлическое давление колесных тормозных цилиндров 122FL и 122RL переднего левого колеса 121FL и заднего левого колеса 121RL сначала используется для того, чтобы увеличивать гидравлическое давление колесных тормозных цилиндров 122FR и 122RR переднего правого колеса FR и заднего правого колеса RR.
В это время, тормозной контроллер 173 управляет тормозным исполнительным устройством 13 так, чтобы открывать обратные SV 132a-132d без работы насоса 1 и насоса 2, при этом SV 133a-133d для снижения давления и SV 131a и 131b отсекания главного цилиндра закрываются.
Как результат, колесные тормозные цилиндры 122RL и 122FR сообщаются друг с другом через обратный SV 132b, магистраль 134a и обратный SV 132a. Таким образом, гидравлическое давление колесного тормозного цилиндра 122FR увеличивается, в то время как гидравлическое давление колесного тормозного цилиндра 122RL уменьшается. Другими словами, гидравлическое давление колесного тормозного цилиндра 122RR увеличивается посредством гидравлического давления колесного тормозного цилиндра 122RL. Таким же образом, колесные тормозные цилиндры 122FL и 122RR сообщаются друг с другом через обратный SV 132d, магистраль 134b и обратный SV 132c. Таким образом, гидравлическое давление колесного тормозного цилиндра 122RR увеличивается, в то время как гидравлическое давление колесного тормозного цилиндра 122FL уменьшается. Другими словами, гидравлическое давление колесного тормозного цилиндра 122RR увеличивается посредством гидравлического давления колесного тормозного цилиндра 122FL.
В период, в который гидравлическое давление колесных тормозных цилиндров 122FR и 122RR увеличивается, в то время как гидравлическое давление колесных тормозных цилиндров 122FL и 122RL уменьшается, тормозная сила прикладывается к каждому из переднего левого колеса 121FL, заднего левого колеса 121RL, переднего правого колеса FR и заднего правого колеса RR (см. период от момента T1 времени до момента T3 времени на фиг. 5).
Затем на этапе S211 на фиг. 4, тормозной контроллер 173 управляет тормозным исполнительным устройством 13 так, чтобы закрывать обратные SV 132a и 132c и открывать обратные SV 132b и 132d и SV 131a и 131b отсекания главного цилиндра, при этом SV 133a-133d для снижения давления закрываются.
Как результат, обратный SV 132b и SV 131a отсекания главного цилиндра открываются. Колесный тормозной цилиндр 122RL сообщается со всасывающим портом насоса 1 через обратный SV 132b и SV 131a отсекания главного цилиндра, и гидравлическое давление колесного тормозного цилиндра 122RL уменьшается. Кроме того, обратный SV 132d и SV 131b отсекания главного цилиндра открываются. Колесный тормозной цилиндр 122FL сообщается со всасывающим портом насоса 2 через обратный SV 132d и SV 131b отсекания главного цилиндра, и гидравлическое давление колесного тормозного цилиндра 122FL уменьшается.
Посредством приложения второго целевого момента относительно вертикальной оси к транспортному средству 1, транспортное средство 1 поворачивает в правую сторону относительно направления движения, и положение транспортного средства 1 корректируется (см. период от момента T3 времени до момента T5 времени на фиг. 5).
"Тормозной контроллер 173" согласно варианту осуществления является одним примером "контроллера" согласно вариантам осуществления настоящего изобретения. "Гидравлическое давление колесных тормозных цилиндров колес на одной из левой и правой сторон" и "гидравлическое давление колесных тормозных цилиндров колес на другой стороне" согласно варианту осуществления, соответственно, являются одним примером "первого давления тормозной жидкости" и "второго давления тормозной жидкости" согласно вариантам осуществления настоящего изобретения. В примере, проиллюстрированном на фиг. 5, "колесные тормозные цилиндры 122FL и 122RL" являются одним примером "первого тормозного механизма" согласно вариантам осуществления настоящего изобретения. "Колесные тормозные цилиндры 122FR и 122RR" являются одним примером "второго тормозного механизма" согласно вариантам осуществления настоящего изобретения. "Обратные SV 132b и 132d" являются одним примером "первого обратного соленоидного клапана" согласно вариантам осуществления настоящего изобретения. "Обратные SV 132a и 132d" являются одним примером "второго обратного соленоидного клапана" согласно вариантам осуществления настоящего изобретения.
Технические преимущества
Согласно операции подавления выезда за пределы полосы движения в варианте осуществления, если имеется вероятность того, что транспортное средство 1 выезжает за пределы полосы движения, первый целевой момент относительно вертикальной оси (т.е. момент относительно вертикальной оси для подавления) прикладывается к транспортному средству 1. Ввиду этого можно подавлять выезд транспортного средства 1 за пределы полосы движения.
Согласно операции подавления выезда за пределы полосы движения в варианте осуществления, можно снижать дискомфорт водителя посредством выполнения процесса на этапе S208 и последующих процессов. Это конкретно поясняется со ссылкой на временную диаграмму на фиг. 6.
На фиг. 6, предполагается, что приложение тормозной силы к колесам на одной из левой и правой сторон начинается, чтобы прикладывать первый целевой момент относительно вертикальной оси к транспортному средству 1. В это время, обратные SV, ассоциированные с колесами на одной стороне (которые представляют собой обратные SV 132b и 132d в примере, проиллюстрированном на фиг. 5), открываются. После того, как гидравлическое давление колесных тормозных цилиндров на одной стороне (которые представляют собой колесные тормозные цилиндры 122FL и 122RL) (т.е. "первое гидравлическое давление" на фиг. 6) достигает значения команды управления давлением, вычисленного на этапе S203 на фиг. 4, работа насосов прекращается, и гидравлическое давление, соответствующее значению команды управления давлением, поддерживается. Как результат, первый целевой момент относительно вертикальной оси прикладывается к транспортному средству 1 (см. график, ассоциированный с "Mz" на фиг. 6).
Предполагается, что приложение тормозной силы к другой стороне начинается в момент T1 времени, чтобы прикладывать второй целевой момент относительно вертикальной оси к транспортному средству 1. В это время, обратные SV, ассоциированные с колесами на одной из левой и правой стороны, и обратные SV, ассоциированные с колесами на другой стороне, открываются.
От момента T0 времени до момента T1 времени, обратные SV, ассоциированные с колесами на другой стороне (которые представляют собой обратные SV 132a и 132c в примере, проиллюстрированном на фиг. 5), закрываются. Таким образом, гидравлическое давление колесных тормозных цилиндров колес на другой стороне (которые представляют собой колесные тормозные цилиндры 122FR и 122RR в примере, проиллюстрированном на фиг. 5) (т.е. "второе гидравлическое давление" на фиг. 6) меньше гидравлического давления колесных тормозных цилиндров колес на одной из левой и правой сторон. Таким образом, если обратные SV, ассоциированные с колесами на одной стороне, и обратные SV, ассоциированные с колесами на другой стороне, открываются, гидравлическое давление колесных тормозных цилиндров колес на одной стороне уменьшается вследствие разности гидравлических давлений, в то время как гидравлическое давление колесных тормозных цилиндров колес на другой стороне увеличивается (см. от момента T1 времени до момента T2 времени на фиг. 6).
Здесь, в частности, следует отметить, что SV для снижения давления не работают (т.е. не открываются) в период от момента T1 времени до момента T2 времени. SV для снижения давления согласно варианту осуществления представляют собой соленоидные клапаны регулирования рабочей нагрузки. При работе, SV для снижения давления согласно варианту осуществления создают шум при работе громче, чем при работе SV отсекания главного цилиндра и обратных SV, которые представляют собой линейные соленоидные клапаны. SV для снижения давления имеют более громкий шум при работе, поскольку колесные тормозные цилиндры имеют более высокое гидравлическое давление. Тем не менее, в варианте осуществления, SV для снижения давления не работают, за счет чего может предотвращаться шум при работе SV для снижения давления.
В момент T2 времени, если гидравлическое давление колесных тормозных цилиндров колес на другой стороне достигает значения команды управления давлением, вычисленного на этапе S207 на фиг. 4, обратные SV, ассоциированные с колесами на другой стороне, закрываются, и SV отсекания главного цилиндра открываются.
В это время, обратные SV, ассоциированные с колесами на одной из левой и правой сторон, поддерживаются открытыми, и ввиду этого открытие SV отсекания главного цилиндра вызывает уменьшение гидравлического давления колесных тормозных цилиндров колес на одной стороне (см. от момента T2 времени до момента T3 времени на фиг. 6). Другими словами, в варианте осуществления, SV отсекания главного цилиндра используются вместо SV для снижения давления. Следовательно, можно предотвращать формирование шума при работе SV для снижения давления.
В момент T3 времени, если гидравлическое давление колесных тормозных цилиндров колес на одной из левой и правой сторон достигает значения команды управления давлением, вычисленного на этапе S207 на фиг. 4, обратные SV, ассоциированные с колесами на одной стороне и SV отсекания главного цилиндра, закрываются. Как результат, от момента T3 времени до момента T4 времени, второй целевой момент относительно вертикальной оси прикладывается к транспортному средству 1.
Затем в момент T4 времени, гидравлическое давление колесных тормозных цилиндров колес на другой стороне уменьшается посредством открытия обратных SV, ассоциированных с колесами на другой стороне, и SV отсекания главного цилиндра. Даже в период от момента T4 времени до момента T5 времени, SV для снижения давления не работают. Ввиду этого можно предотвращать формирование шума при работе SV для снижения давления.
Сравнительный пример
Далее поясняется операция подавления выезда за пределы полосы движения согласно сравнительному примеру со ссылкой на временную диаграмму на фиг. 7.
В операции подавления выезда за пределы полосы движения согласно сравнительному примеру, чтобы прикладывать первый целевой момент относительно вертикальной оси к транспортному средству, обратные SV, ассоциированные с колесами на одной из левой и правой сторон, открываются при работе насосов, и SV для снижения давления, ассоциированные с колесами на одной стороне, закрываются (см. моменты T0-T11 времени на фиг. 7). Затем чтобы уменьшать гидравлическое давление колесных тормозных цилиндров колес на одной стороне (т.е. "первое гидравлическое давление на фиг. 7), SV для снижения давления, ассоциированные с колесами на одной стороне, открываются, и обратные SV, ассоциированные с одной стороной, закрываются (см. моменты T12-T13 времени на фиг. 7).
После этого, чтобы прикладывать второй целевой момент относительно вертикальной оси к транспортному средству, обратные SV, ассоциированные с колесами на другой стороне, открываются при работе насосов, и SV для снижения давления, ассоциированные с колесами на другой стороне, закрываются (см. моменты T13-T14 времени на фиг. 7). Затем чтобы уменьшать гидравлическое давление колесных тормозных цилиндров колес на другой стороне (т.е. "второе гидравлическое давление на фиг. 7), SV для снижения давления, ассоциированные с колесами на другой стороне, открываются, и обратные SV, ассоциированные с другой стороной, закрываются (см. моменты T15-T16 времени на фиг. 7).
В операции подавления выезда за пределы полосы движения согласно сравнительному примеру, замедление в продольном направлении транспортного средства увеличивается, уменьшается, увеличивается и уменьшается (см. график, ассоциированный с "замедлением" на фиг. 7). Таким образом, водитель возможно ощущает так называемую кратковременную потерю чувства торможения и дискомфорт.
С другой стороны, со ссылкой на график, ассоциированный с "замедлением" на фиг. 6, замедление не увеличивается после момента T2 времени. Это обусловлено тем, что в операции подавления выезда за допустимые пределы согласно варианту осуществления, гидравлическое давление колесных тормозных цилиндров колес на одной из левой и правой сторон вызывает увеличение гидравлического давления колесных тормозных цилиндров колес на другой стороне в период от момента T1 времени до момента T2 времени. Следовательно, согласно операции подавления выезда за допустимые пределы в варианте осуществления, дискомфорт водителя, вызываемый посредством увеличения/уменьшения замедления, может подавляться.
Период от момента T1 времени до момента T2 времени на фиг. 6, который является одним конкретным примером "предварительно определенного периода" согласно вариантам осуществления настоящего изобретения, определяется в соответствии с наклоном момента относительно вертикальной оси (см. график, ассоциированный с "Mz" на фиг. 6) (т.е. степенью изменения момента относительно вертикальной оси в единицу времени). Относительно крутой наклон момента относительно вертикальной оси возможно вызывает дискомфорт у водителя. С другой стороны, относительно умеренный наклон момента относительно вертикальной оси не вызывает дискомфорт у водителя; тем не менее, приложение второго целевого момента относительно вертикальной оси задерживается, что увеличивает вероятность того, что транспортное средство 1 выезжает за пределы полосы движения снова.
В варианте осуществления, период от момента T1 времени до момента T2 времени задается в качестве периода, в который наклон момента относительно вертикальной оси не вызывает дискомфорт у водителя, при одновременном предотвращении выезда транспортного средства 1 за пределы полосы движения снова. Этот период может быть реализован посредством регулирования наклона снижения давления для гидравлического давления колесных тормозных цилиндров колес на одной из левой и правой сторон (т.е. "первого гидравлического давления" на фиг. 6) и наклона увеличения давления для гидравлического давления колесных тормозных цилиндров колес на другой стороне (т.е. "второго гидравлического давления" на фиг. 6), а более конкретно, посредством регулирования открытия обратных SV.
В примере, проиллюстрированном на фиг. 5, тормозная сила прикладывается к переднему левому колесу 121FL и заднему левому колесу 121RL, чтобы подавлять выезд транспортного средства 1 за пределы полосы движения, и после этого тормозная сила прикладывается к переднему правому колесу 121FR и заднему правому колесу 121RR, чтобы корректировать положение транспортного средства 1. На основе такой конфигурации, можно уменьшать нагрузку на колеса, например, по сравнению с тем, когда тормозная сила прикладывается только к переднему левому колесу 121FL, чтобы подавлять выезд за пределы полосы движения, что является чрезвычайно полезным на практике.
Тем не менее, тормозная сила может прикладываться только к одному из переднего колеса и заднего колеса на одной из левой и правой сторон, чтобы подавлять выезд транспортного средства 1 за пределы полосы движения, и после этого тормозная сила может прикладываться только к одному из переднего колеса и заднего колеса с другой стороны, чтобы корректировать положение транспортного средства 1.
В период от момента T2 времени до момента T3 времени на фиг. 6, если гидравлическое давление колесных тормозных цилиндров колес на одной из левой и правой сторон уменьшается, SV для снижения давления могут использоваться вместо SV отсекания главного цилиндра. Причина этого заключается в следующем. Гидравлическое давление колесных тормозных цилиндров колес на внутренней стороне в момент T2 времени меньше гидравлического давления в момент T1 времени. Даже если SV для снижения давления работают, сформированный шум при работе является относительно небольшим. Ввиду этого имеется низкая вероятность того, что шум при работе SV для снижения давления вызывает дискомфорт у водителя.
Модифицированный пример
В вышеуказанном варианте осуществления, первый целевой момент относительно вертикальной оси и второй целевой момент относительно вертикальной оси прикладываются к транспортному средству 1 посредством операции подавления выезда за пределы полосы движения (т.е. тормозной LDA). Варианты осуществления настоящего изобретения могут применяться не только к тормозной LDA, но также и к управлению для компенсации бокового ветра и операции избежания опасности, при которой момент относительно вертикальной оси прикладывается к транспортному средству 1 посредством использования разности тормозных сил между левыми и правыми колесами.
В частности, варианты осуществления настоящего изобретения могут применяться к управлению для компенсации бокового ветра, если первый момент относительно вертикальной оси для возврата транспортного средства, которое выезжает за пределы центра полосы движения в направлении ширины полосы движения вследствие бокового ветра, к центру полосы движения прикладывается к транспортному средству, и если второй момент относительно вертикальной оси для коррекции положения транспортного средства затем прикладывается к транспортному средству. Варианты осуществления настоящего изобретения могут применяться к операции избежания опасности, если первый момент относительно вертикальной оси для избежания едущего впереди транспортного средства, помехи и т.п. прикладывается к транспортному средству, и если второй момент относительно вертикальной оси для коррекции положения транспортного средства затем прикладывается к транспортному средству. В любом случае, дискомфорт водителя может подавляться, как указано в вышеуказанном варианте осуществления.
Изобретение может быть осуществлено в других характерных формах без отступления от сущности или важнейших характеристик. Ввиду этого, настоящие варианты осуществления и примеры должны рассматриваться во всех отношениях как иллюстративные, а не ограничивающие, при этом объем изобретения указывается посредством прилагаемой формулы изобретения, а не посредством вышеприведенного описания, и все изменения, которые подпадают под смысл и диапазон эквивалентности формулы изобретения, ввиду этого должны охватываться им.
Реферат
Изобретение относится к устройству управления тормозным устройством транспортного средства. Тормозное устройство выполнено с возможностью прикладывать тормозную силу, соответствующую давлению тормозной жидкости, к каждому из множества колес. Устройство управления тормозным устройством содержит контроллер. Контроллер выполнен с возможностью задавать первое давление тормозной жидкости, ассоциированное с колесами на одной из левой и правой сторон из множества колес так, что оно выше второго давления тормозной жидкости, ассоциированного с колесами на другой стороне, чтобы обеспечивать поворот транспортного средства в одном направлении. Контроллер выполнен с возможностью увеличивать второе давление тормозной жидкости посредством использования разности давлений жидкости между первым давлением тормозной жидкости и вторым давлением тормозной жидкости и задавать первое давление тормозной жидкости так, что оно ниже второго давления тормозной жидкости при поддержании второго давления тормозной жидкости, чтобы обеспечивать поворот транспортного средства в другом направлении, которое отличается от упомянутого одного направления. Достигается комфортный поворот транспортного средства посредством использования разности тормозных сил между левыми и правыми колесами. 7 з.п. ф-лы, 7 ил.
Комментарии