Устройство управления и способ управления содействием парковке - RU2533775C2
Код документа: RU2533775C2
Чертежи
Описание
Область техники, к которой относится изобретение
[0001]
Настоящее изобретение относится к устройству управления содействием парковке, которое выполняет содействие вождению из-за препятствия вокруг транспортного средства, и к способу управления.
Уровень техники
[0002]
В качестве содействия вождению из-за препятствия вокруг транспортного средства, раскрыта технология, раскрытая в Патентной Литературе 1, упомянутой ниже по тексту. При содействии вождению, раскрытому в Патентной Литературе 1, обнаруживается расстояние до препятствия впереди или позади транспортного средства, и начинается автоматическое торможение, когда обнаруженное расстояние меньше расстояния начала торможения, а также скорость приближения к препятствию превышает предварительно определенную скорость. В Патентной Литературе 1, содействие парковке раскрывается в качестве одного примера содействия вождению.
Список цитат
Патентная литература
[0003]
Патентная Литература 1. Не прошедшая экспертизу патентная публикация (Япония) № H11-314564
Сущность изобретения
[0004]
При вышеуказанном содействии вождению имеется проблема в том, что автоматическое торможение может вызывать странное ощущение у водителя в зависимости от условия вождения.
Цель настоящего изобретения заключается в том, чтобы предоставлять устройство управления и способ управления содействием парковке, которые позволяют выполнять содействие вождению относительно препятствия вокруг транспортного средства более надлежащим образом.
[0005]
Первый аспект настоящего изобретения предоставляет устройство управления содействием парковке, которое включает в себя: детектор препятствий (средство обнаружения препятствий), который обнаруживает препятствие вокруг транспортного средства; модуль содействия операции парковки (средство содействия операции парковки), который выполняет, когда определяется то, что расстояние между препятствием, обнаруженным посредством детектора препятствий (средства обнаружения препятствий), и транспортным средством становится равным или меньше предварительно определенного расстояния начала управления, содействие операции парковки для предотвращения сближения между препятствием и транспортным средством; модуль определения начала парковки (модуль определения парковки), который определяет операцию парковки; модуль определения хода выполнения парковки (средство определения хода выполнения парковки), который определяет степень выполнения парковки во время операции парковки, определенной посредством модуля определения начала парковки (модуля определения парковки); и модуль вычисления хода выполнения парковки (средство вычисления хода выполнения парковки), который уменьшает величину управления содействием посредством модуля содействия операции парковки (средства содействия операции парковки) согласно степени выполнения парковки, определенной посредством модуля определения хода выполнения парковки (средства определения хода выполнения парковки).
[0006]
Второй аспект настоящего изобретения предоставляет способ управления содействием парковке, который включает в себя: обнаружение препятствия вокруг транспортного средства; определение того, становится или нет расстояние между препятствием и транспортным средством равным или меньше предварительно определенного расстояния начала управления; выполнение содействия операции парковки для предотвращения сближения между препятствием и транспортным средством, когда определено, что расстояние между препятствием и транспортным средством становится равным или меньше предварительно определенного расстояния начала управления; определение степени выполнения парковки во время операции парковки; и уменьшение величины управления для содействия операции парковки согласно степени выполнения парковки, которая определена.
Краткое описание чертежей
[0007]
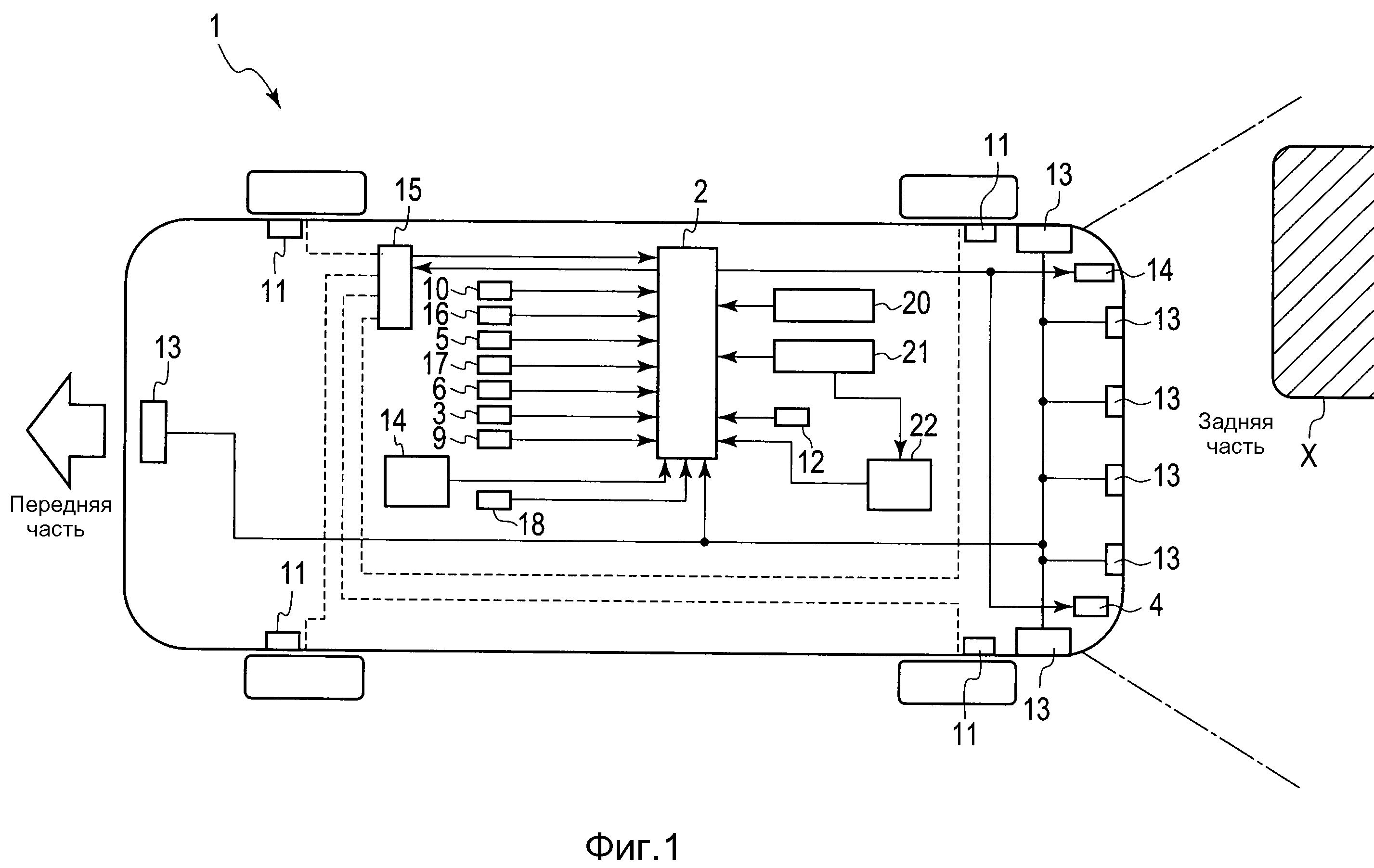
Фиг. 1 является схемой конфигурации транспортного средства, которое обеспечено устройством управления содействием парковке.
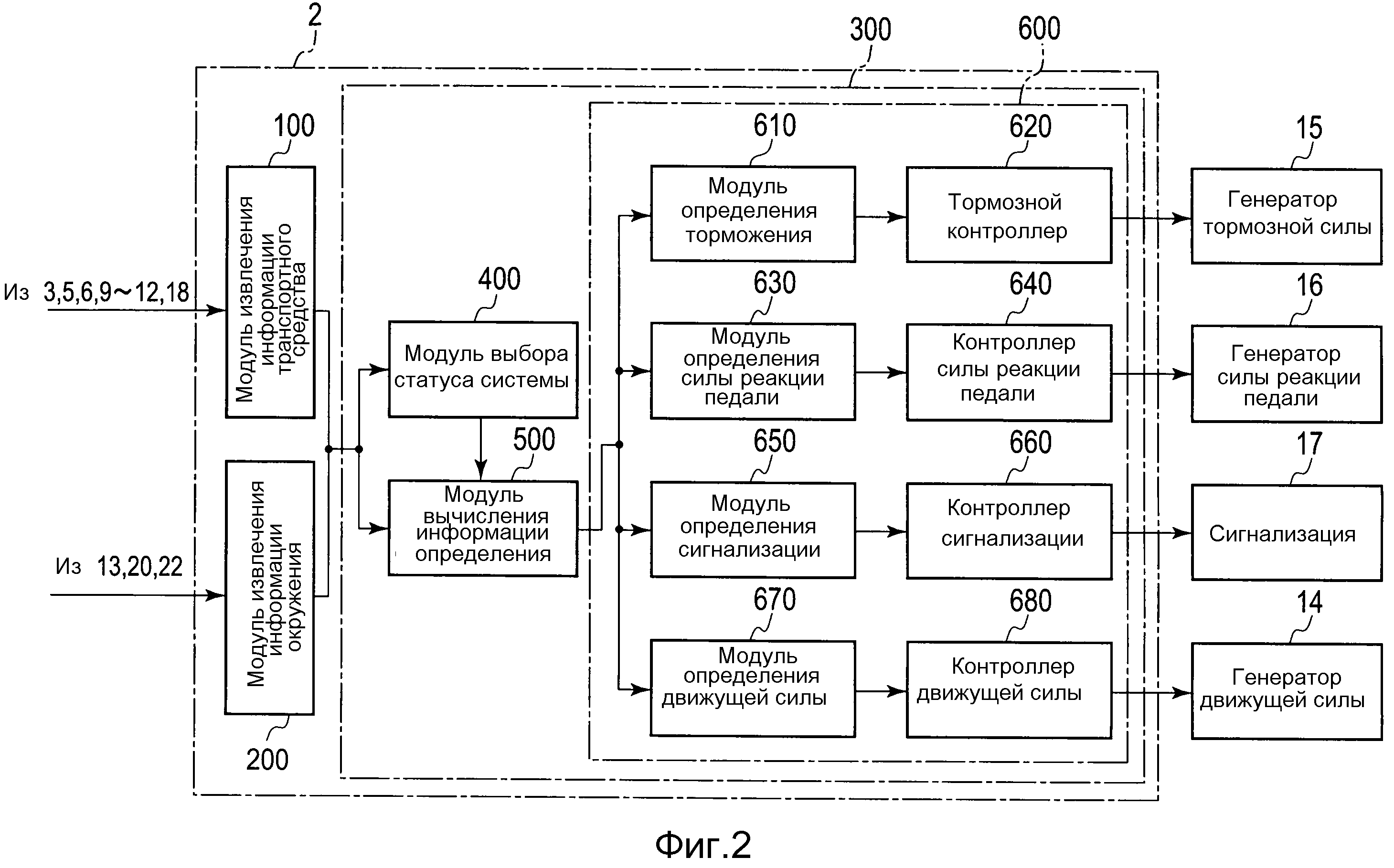
Фиг. 2 является блок-схемой устройства управления содействием парковке.
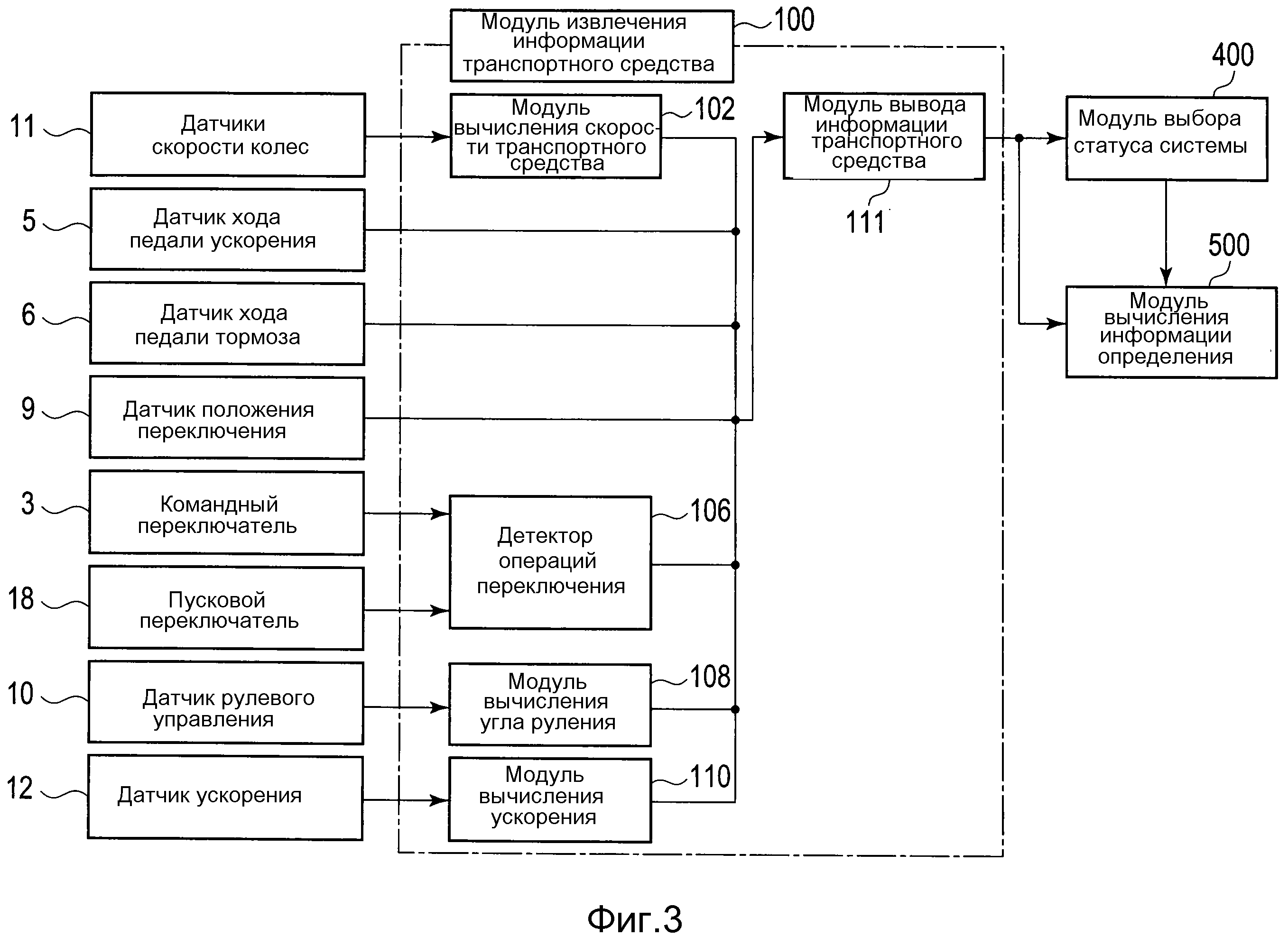
Фиг. 3 является блок-схемой модуля извлечения информации транспортного средства.
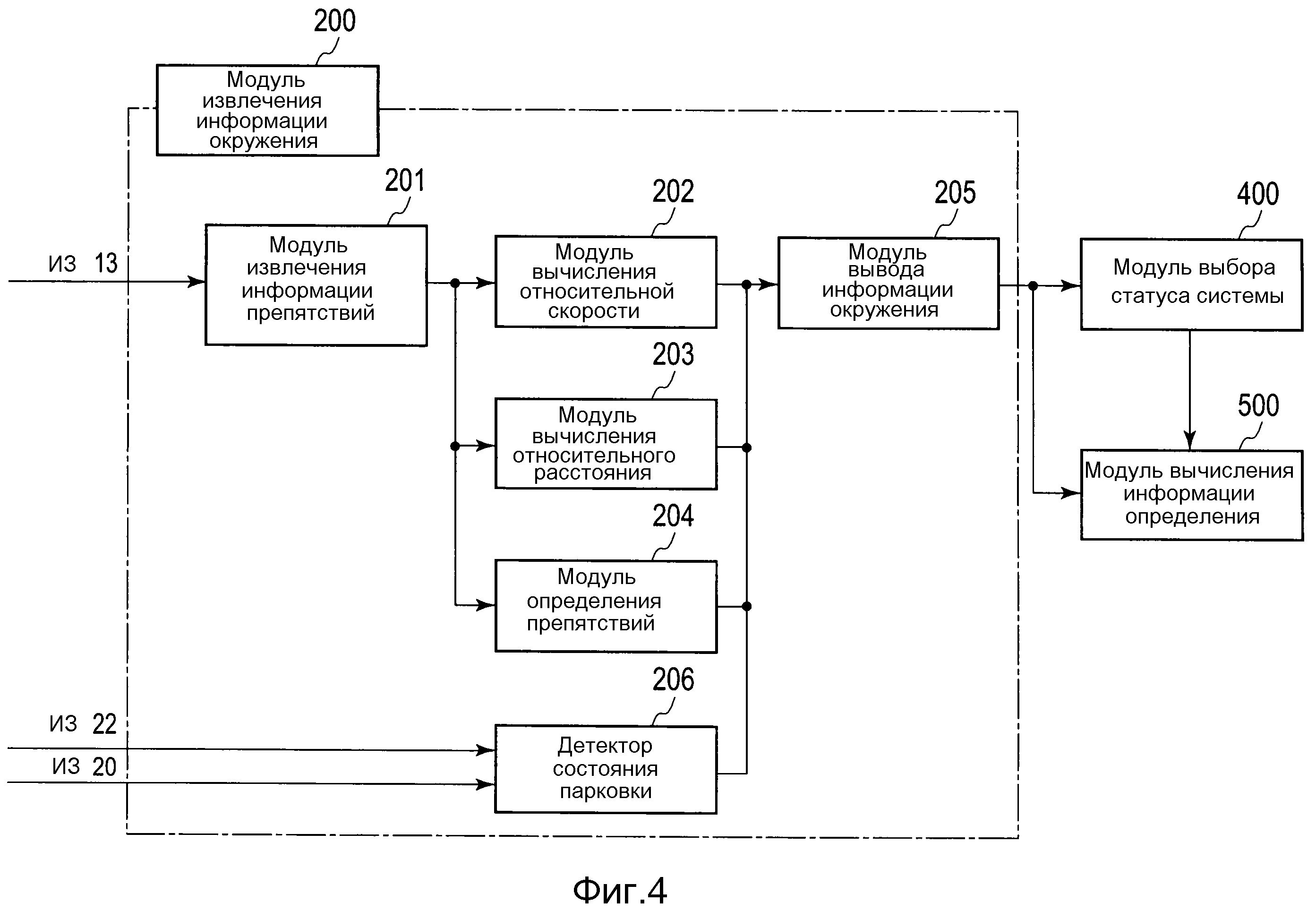
Фиг. 4 является блок-схемой модуля извлечения информации окружения.
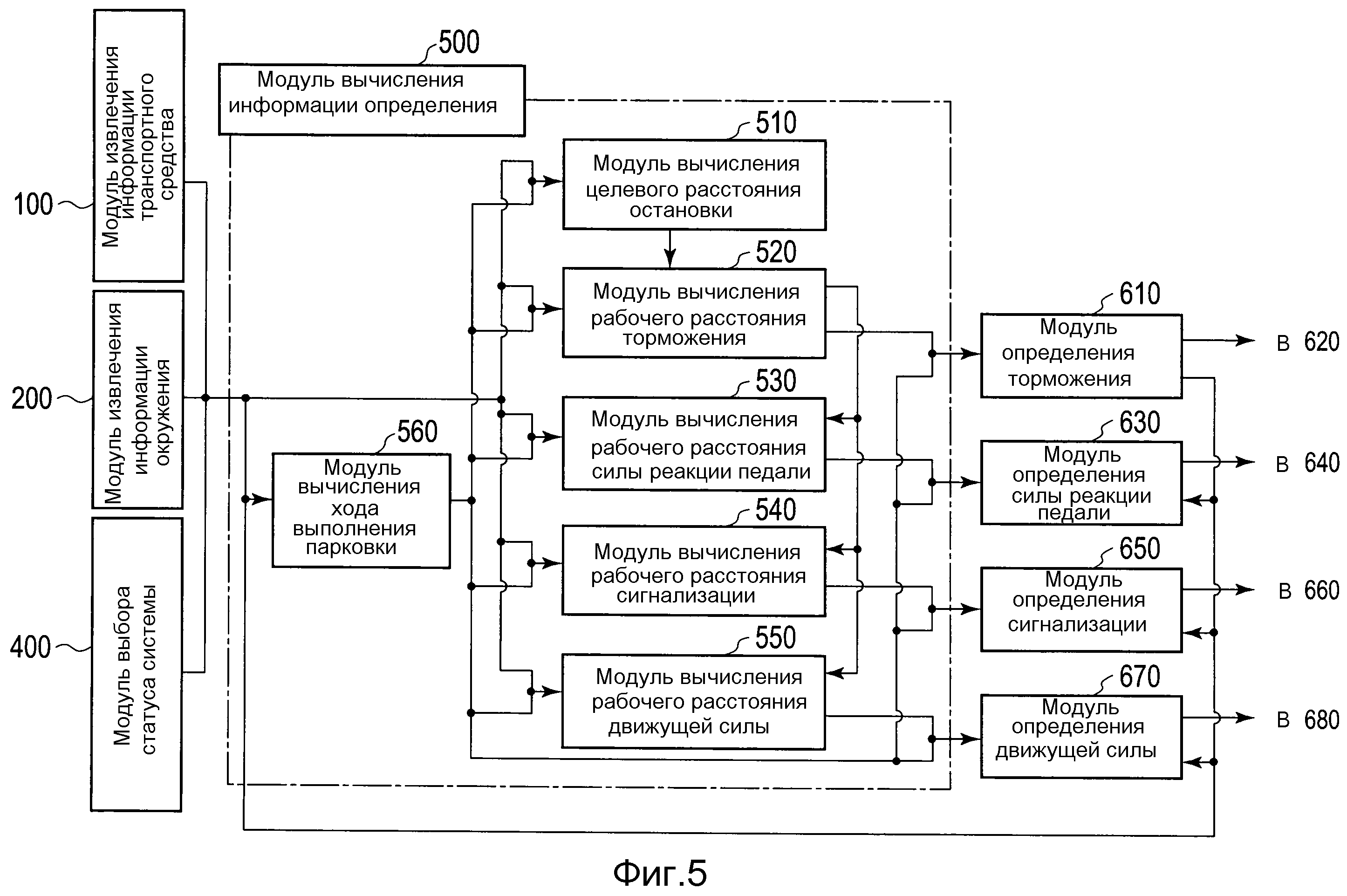
Фиг. 5 является блок-схемой модуля вычисления информации определения.
Фиг. 6 является блок-схемой модуля вычисления хода выполнения парковки.
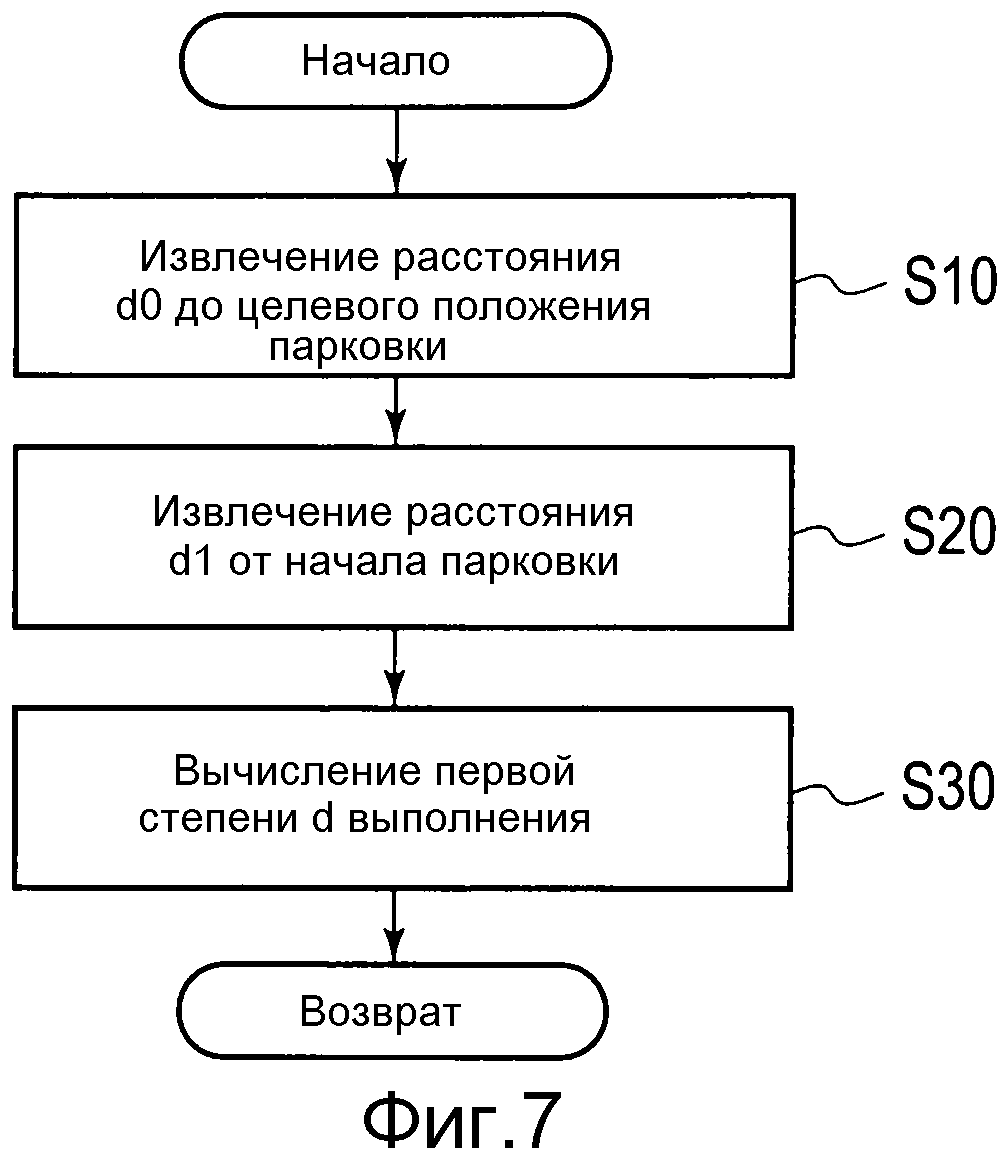
Фиг. 7 является блок-схемой последовательности операций способа, показывающей процессы, выполняемые модулем определения продвижения по расстоянию.
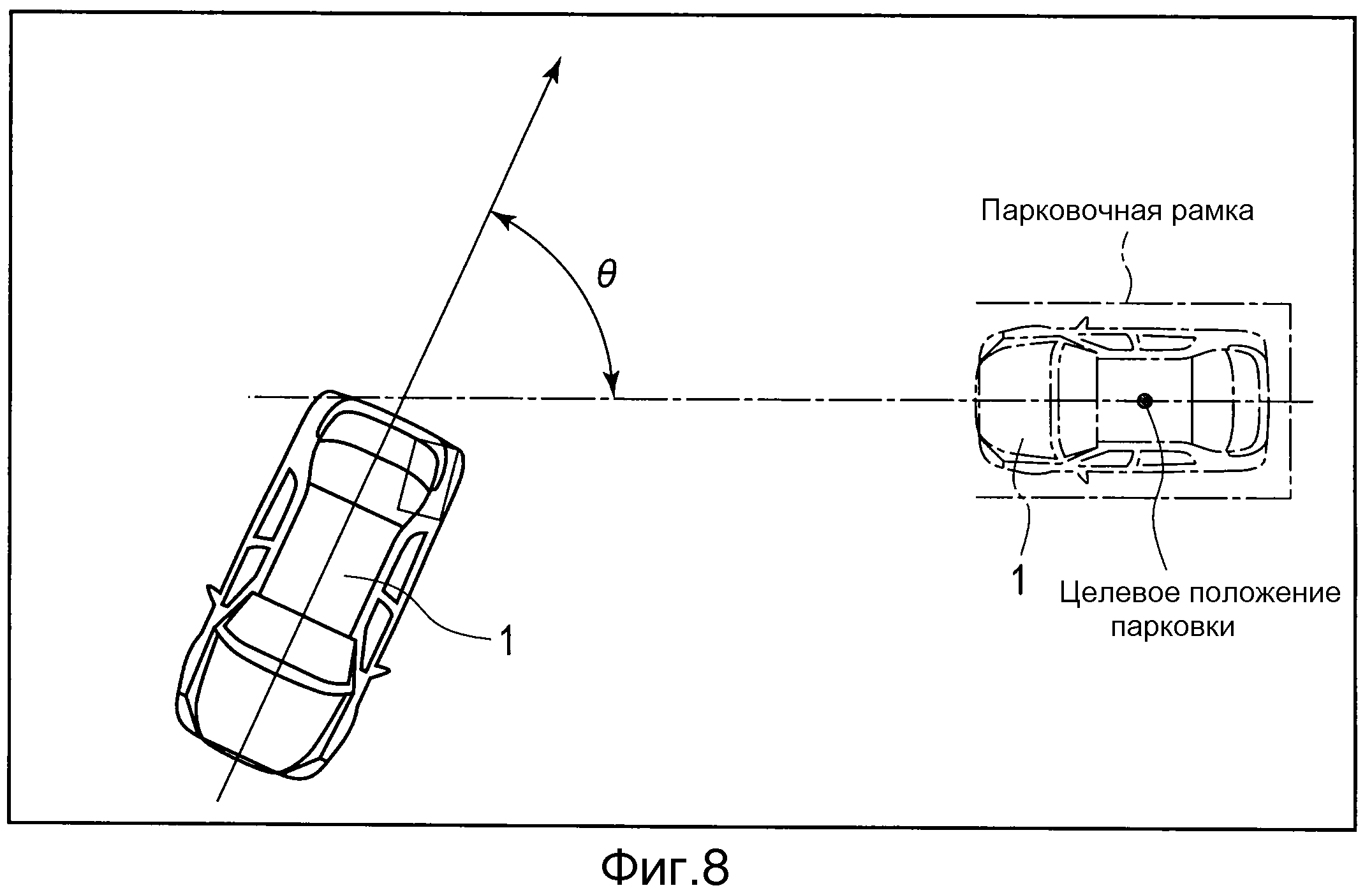
Фиг. 8 является видом сверху для пояснения второй степени выполнения парковки (обнаруженного угла) θ.
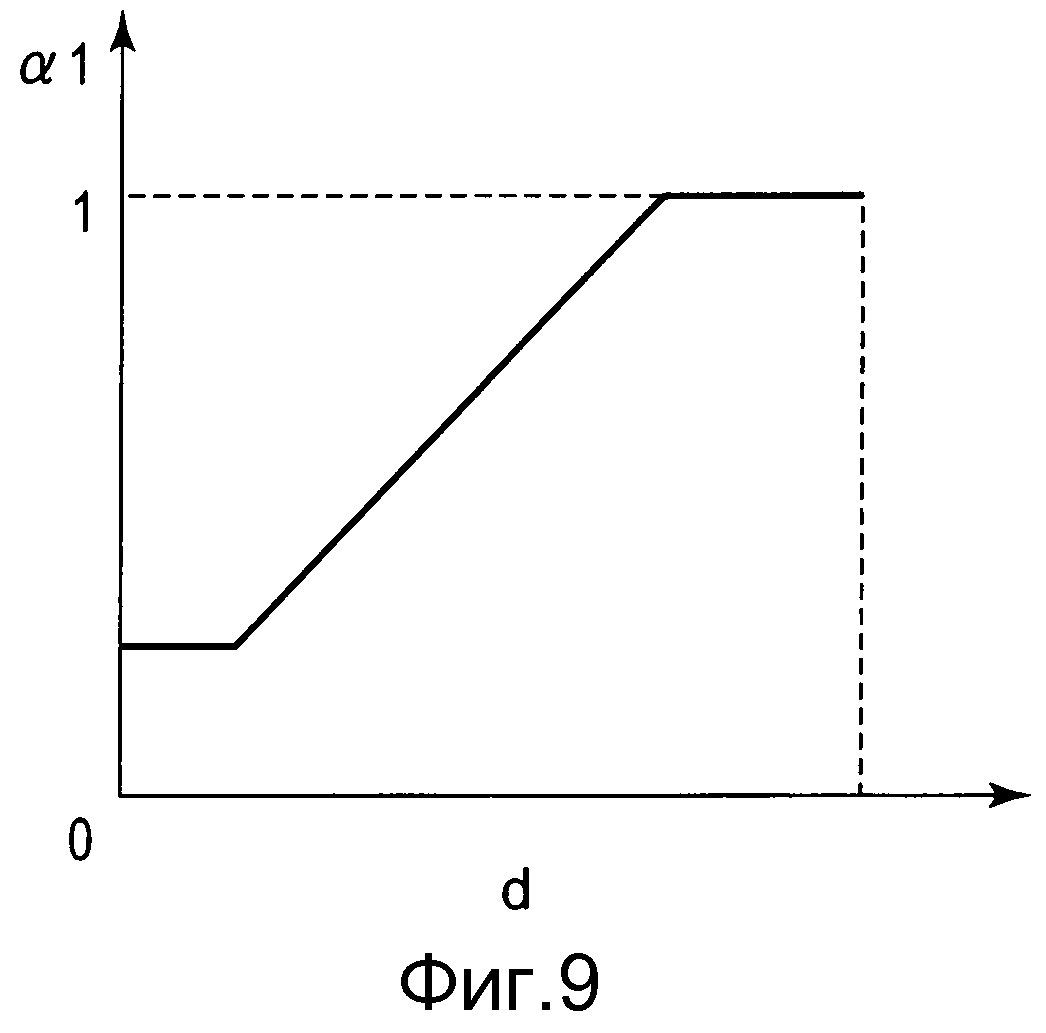
Фиг. 9 является графиком, показывающим соотношение между первой степенью d выполнения парковки и первым приростом α1 в ходе выполнения парковки.
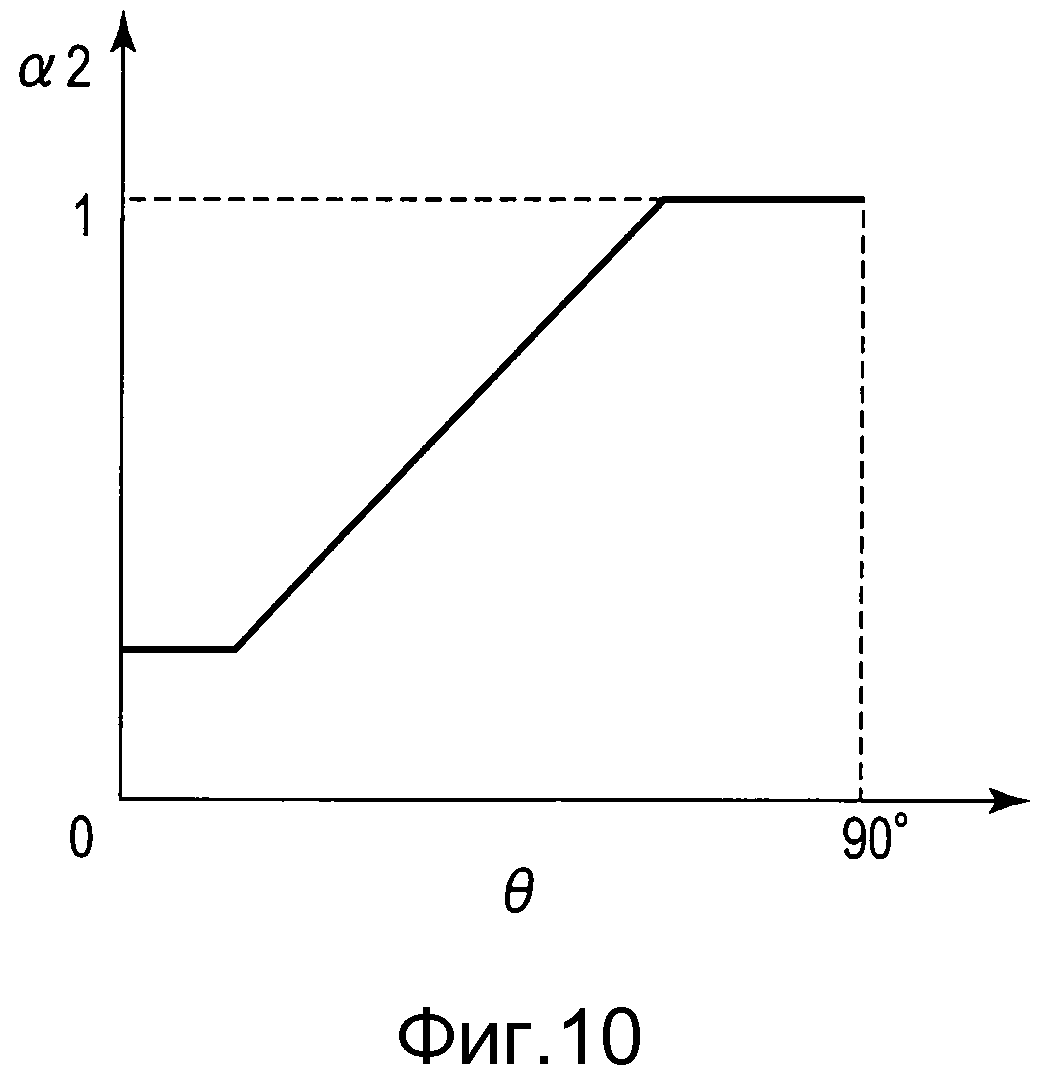
Фиг. 10 является графиком, показывающим соотношение между второй степенью θ выполнения парковки и вторым приростом α2 в ходе выполнения парковки.
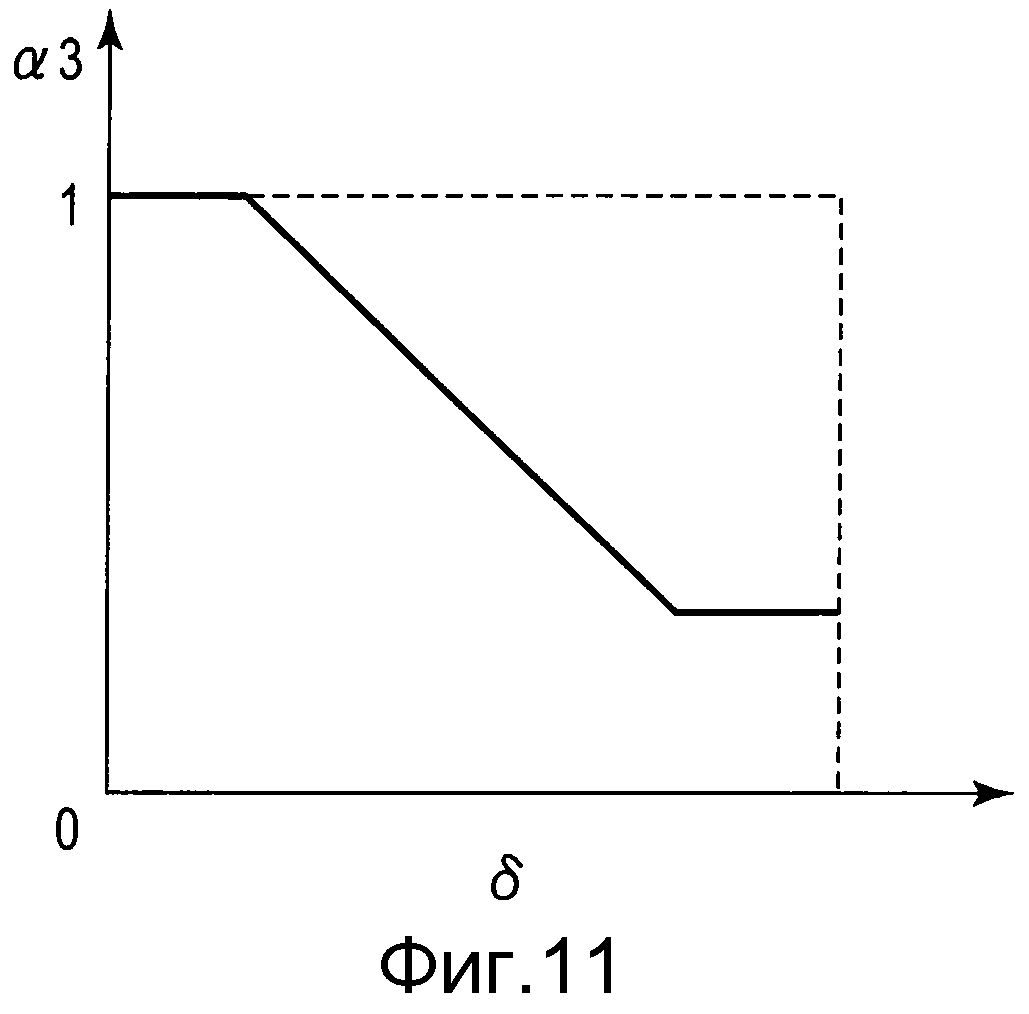
Фиг. 11 является графиком, показывающим соотношение между третьей степенью δ выполнения парковки и третьим приростом α3 в ходе выполнения парковки.
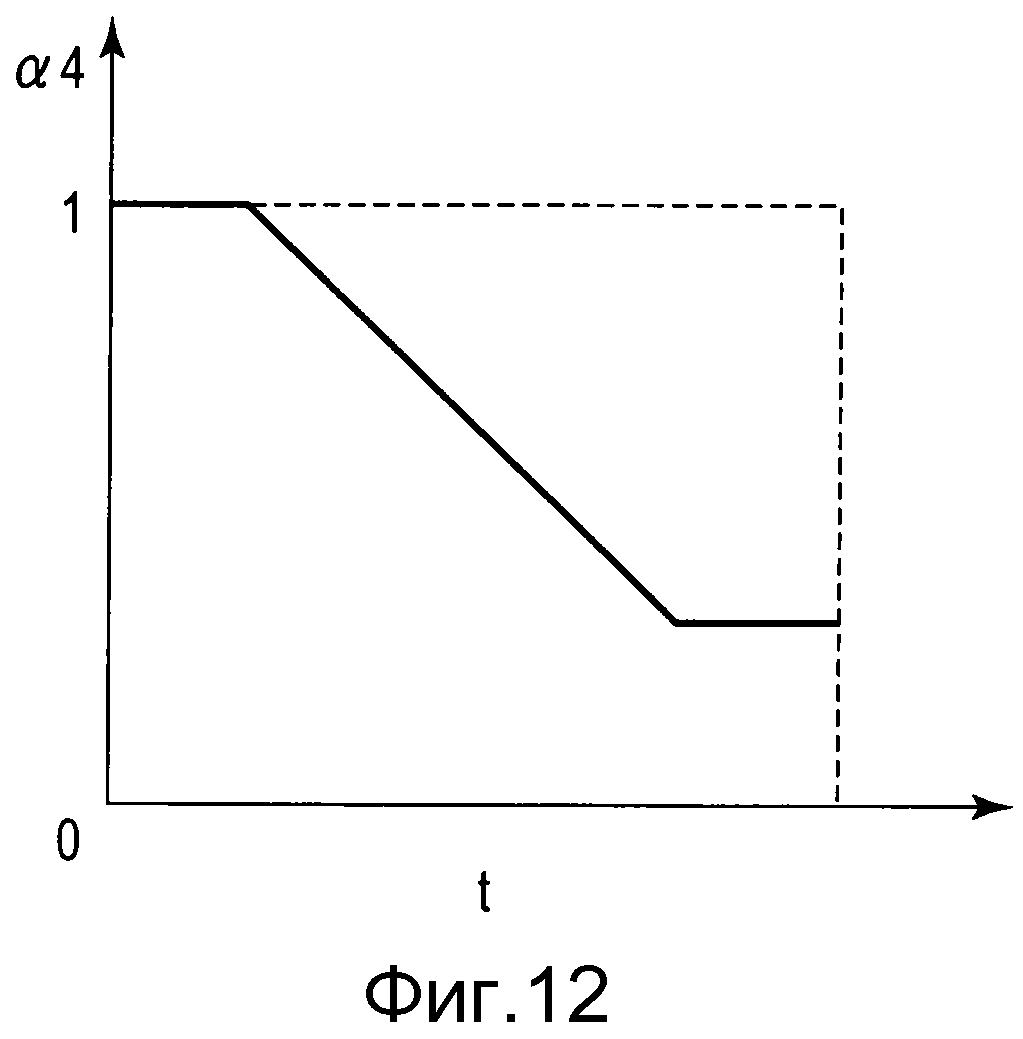
Фиг. 12 является графиком, показывающим соотношение между четвертой степенью t выполнения парковки и четвертым приростом α4 в ходе выполнения парковки.
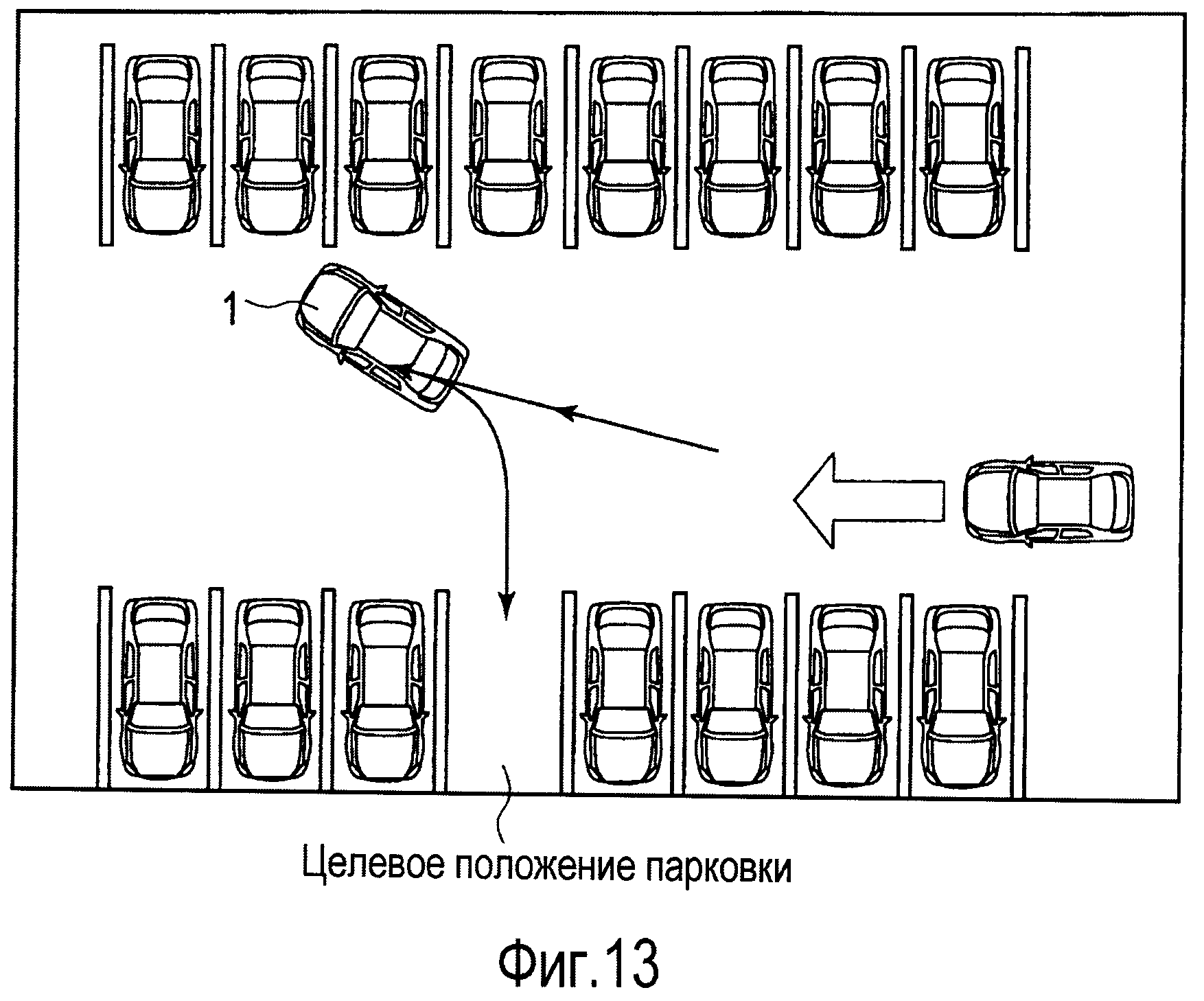
Фиг. 13 является видом сверху, показывающим пример, в котором управление содействием вождению ограничено.
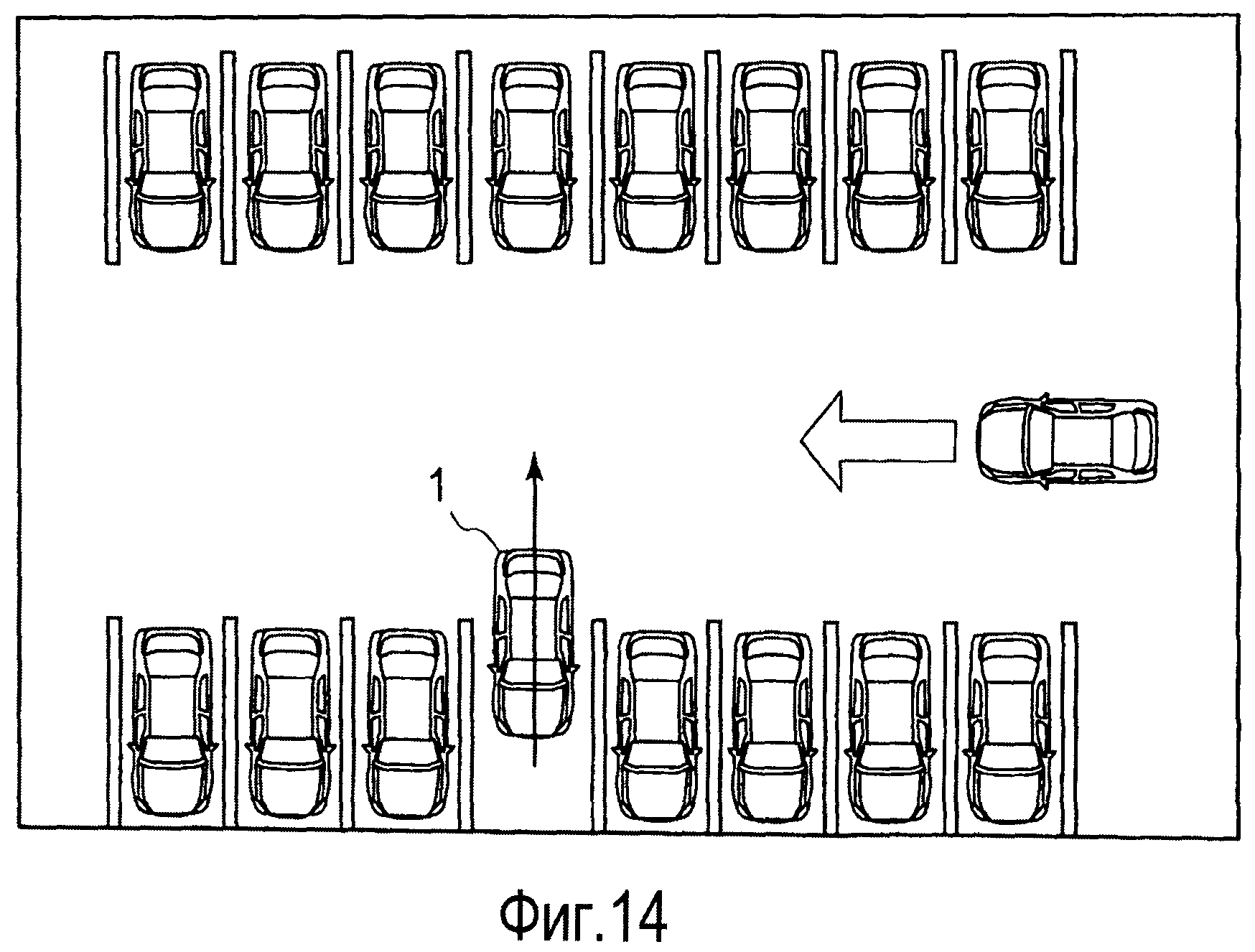
Фиг. 14 является видом сверху, показывающим пример, в котором управление содействием вождению не ограничено.
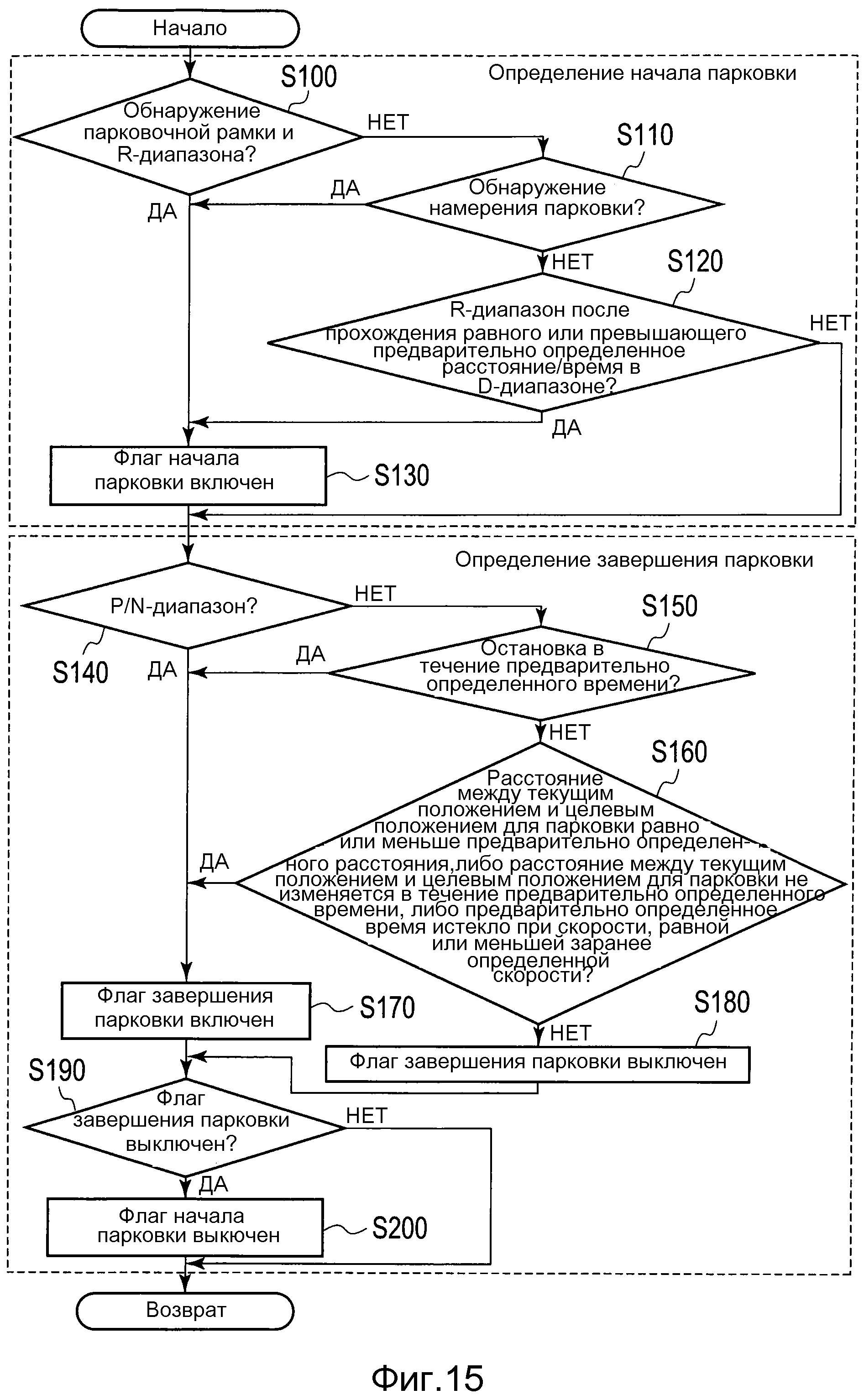
Фиг. 15 является блок-схемой последовательности операций способа, показывающей процессы выполняемые модулем определения начала парковки.
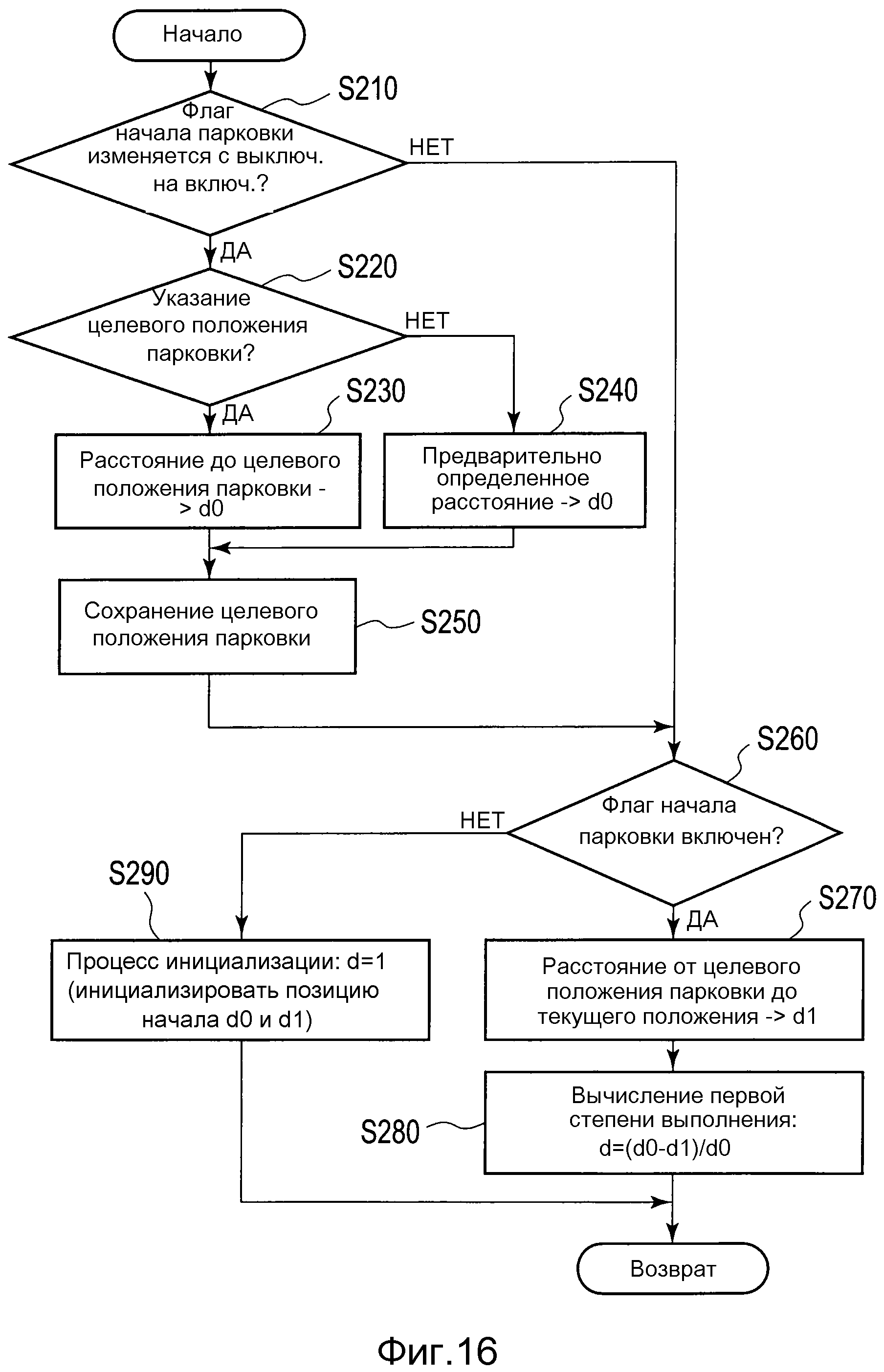
Фиг. 16 является блок-схемой последовательности операций способа, показывающей процессы, выполняемые модулем определения продвижения по расстоянию.
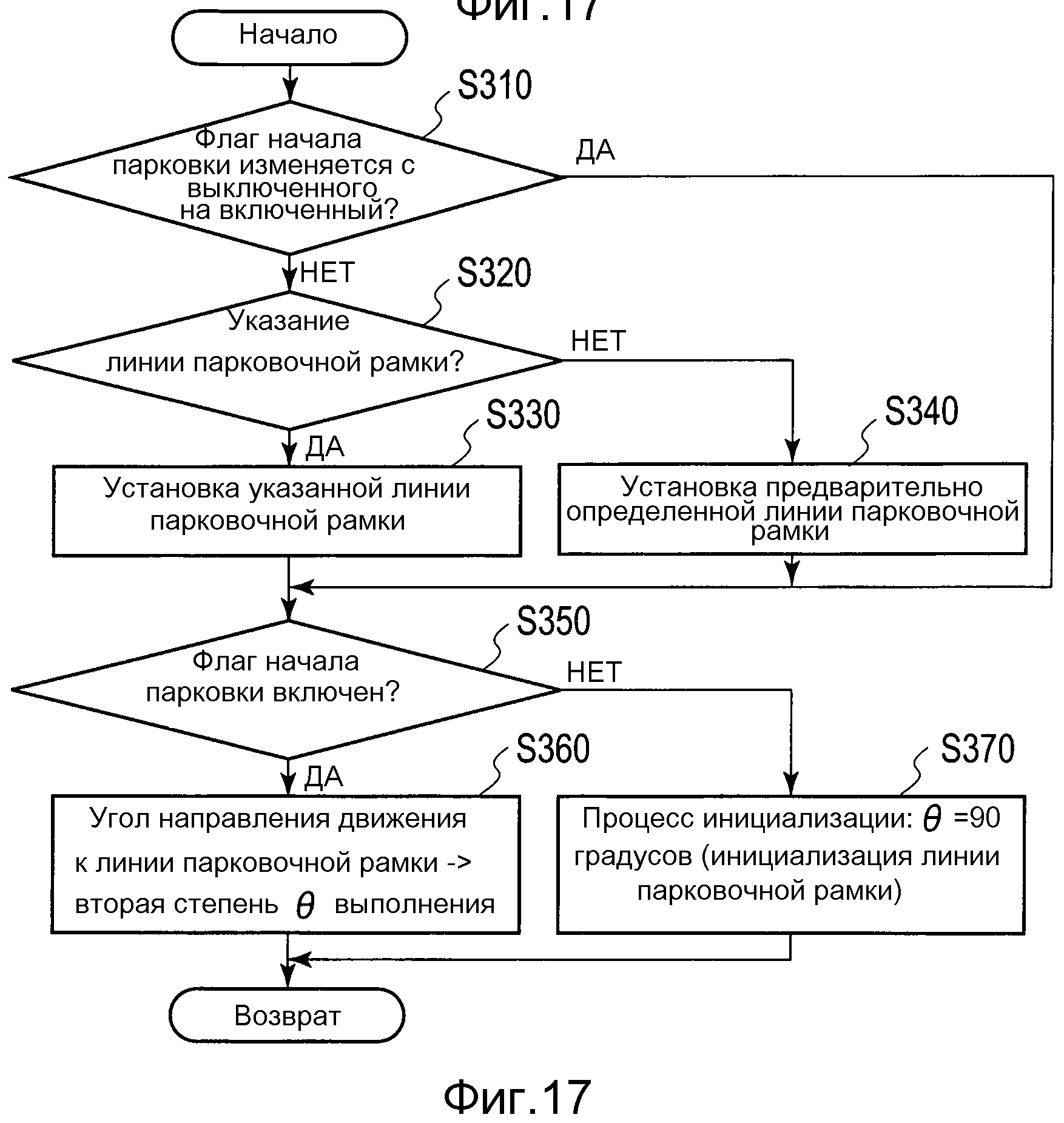
Фиг. 17 является блок-схемой последовательности операций способа, показывающей процессы, выполняемые модулем определения продвижения по углу.
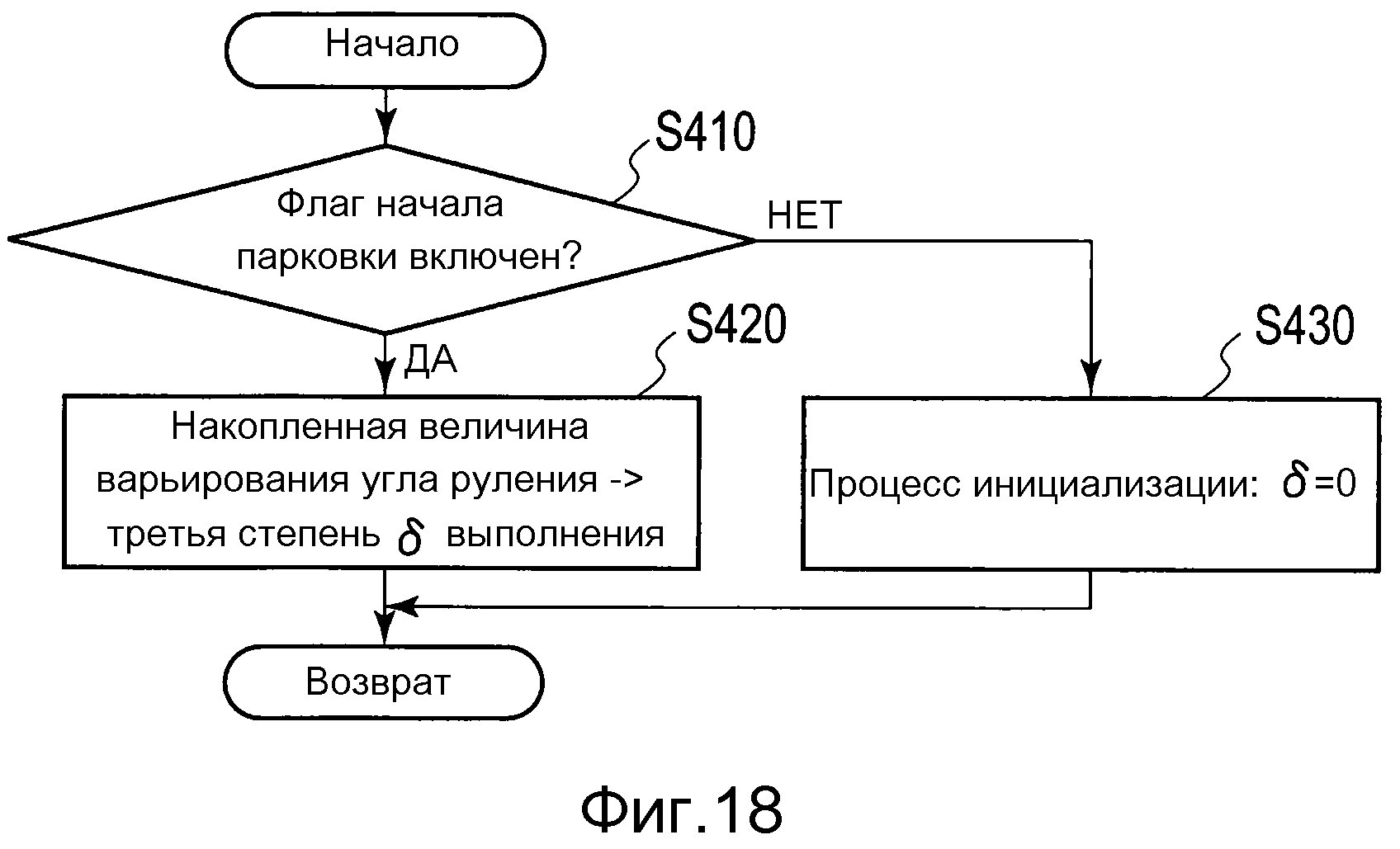
Фиг. 18 является блок-схемой последовательности операций способа, показывающей процессы, выполняемые модулем определения продвижения по рулению.
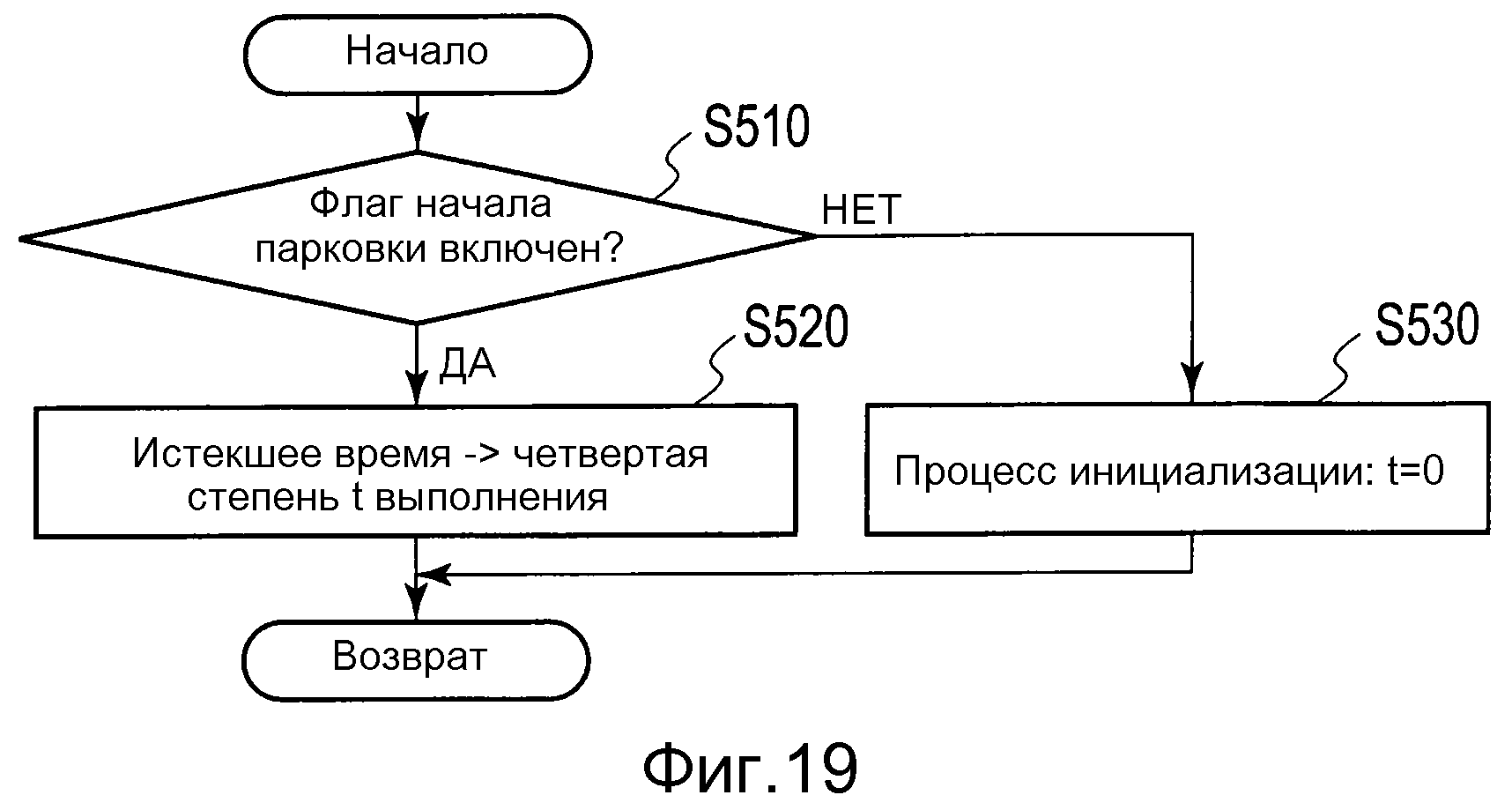
Фиг. 19 является блок-схемой последовательности операций способа, показывающей процессы, выполняемые модулем определения продвижения по времени.
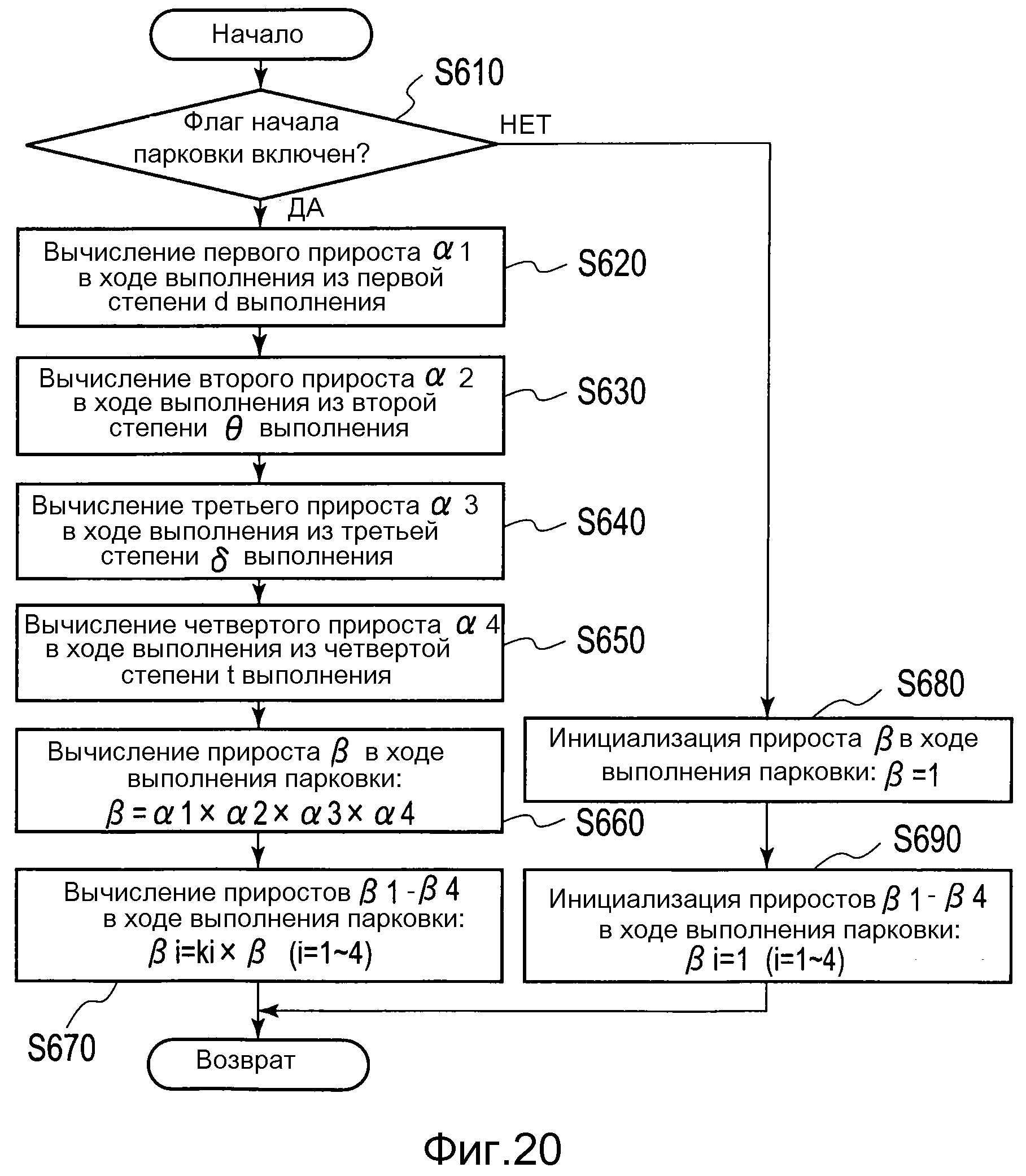
Фиг. 20 является блок-схемой последовательности операций способа, показывающей процессы, выполняемые модулем вычисления прироста в ходе выполнения.
Подробное описание вариантов осуществления
[0008]
Вариант осуществления поясняется со ссылкой на чертежи.
Конфигурация
Как показано на фиг. 1, устройство 2 управления содействием парковке, командный переключатель 3, лампа 4 тормоза, датчик 5 хода педали ускорения, датчик 6 хода педали тормоза, датчик 9 положения переключения (коробки передач), датчик 10 руления, датчики 11 скоростей колес, датчик 12 ускорения, пусковой переключатель 18, детекторы 13 препятствий (средство обнаружения препятствий), генератор 14 движущей силы, генератор 15 тормозной силы, генератор 16 силы реакции педали и сигнализация 17 устанавливаются на транспортном средстве 1. Командный переключатель 3 управляется пассажиром (водителем), и пассажир выдает команду на активацию/деактивацию устройства содействия вождению посредством использования командного переключателя 3. Датчик 5 хода педали ускорения располагается в педали ускорения и обнаруживает ход (рабочее положение) педали ускорения. Датчик 6 хода педали тормоза располагается в педали тормоза и обнаруживает ход (рабочее положение) педали тормоза. Датчик 9 положения переключения обнаруживает положение переключения (диапазон переключения, к примеру, P, R, N и D рычага селектора автоматической трансмиссии) трансмиссии. Датчик 10 руления обнаруживает угол руления рулевого колеса. Датчики 11 скоростей колес располагаются в ходовых колесах соответственно и обнаруживают скорости вращения ходовых колес (хотя не показано на фиг. 1, датчики 11 скоростей колес соединяются с устройством 2 управления содействием парковке соответственно). Датчик 12 ускорения обнаруживает ускорение транспортного средства 1. Пассажир управляет активацией/деактивацией приводного устройства (к примеру, двигателя внутреннего сгорания) посредством использования пускового переключателя 18. Генератор 16 силы реакции педали генерирует силу реакции для педали ускорения.
[0009]
Помимо этого, навигационный модуль 20, камера 21 и устройство 22 содействия парковке устанавливаются на транспортном средстве 1. Навигационная система 20 снабжена GPS и хранит картографическую информацию. Камера 21 снимает видео окружения транспортного средства 1.
Устройство 22 содействия парковке автоматически активируется, когда диапазон переключения устанавливается в диапазон движения задним ходом (R). Устройство 22 содействия парковке генерирует изображение вида сверху транспортного средства 1 с окружением на основе видео, снятого камерой 21, и отображает изображение вида сверху на устройстве отображения (не показано), расположенном у сиденья водителя. Затем,, когда пассажир указывает целевое положение парковки на изображении вида сверху, устройство 22 содействия парковке вычисляет путь движения от текущего положения до целевого положения парковки. Следует отметить, что целевое положение парковки может указываться пассажиром, как пояснено выше по тексту, или парковочная рамка может быть автоматически установлена на основе снятого видео (либо вида сверху) (например, изображение обрабатывается посредством процесса обработки краев, и линия парковочной рамки, нанесенная на дорожную поверхность в целевом положении парковки, обнаруживается из изображения, обработанного посредством процесса обработки краев). Следует отметить, что в настоящем варианте осуществления, парковочная рамка может быть обнаружена из изображения, даже когда целевое положение парковки указывается пассажиром.
[0010]
Затем устройство 22 содействия парковке отображает путь движения на устройстве отображения посредством размещения его поверх изображения вида сверху и выводит расстояние от текущего положения до целевого положения парковки в устройство 2 управления содействием парковке. Здесь расстояние от текущего положения до целевого положения парковки может быть кратчайшим расстоянием (линейным расстоянием) или расстоянием вдоль пути движения от текущего положения до целевого положения парковки.
[0011]
Следует отметить, что содействие парковке посредством устройства 22 содействия парковке может быть выполнено таким образом, что угол руления рулевого колеса управляется, чтобы вести транспортное средство 1 вдоль пути движения, но не ограничено этим. Как показано на фиг. 2, устройство 2 управления содействием парковке включает в себя модуль 100 извлечения информации транспортного средства, модуль 200 вычисления скорости транспортного средства и главный контроллер 300. Устройство 2 управления содействием парковке достигает содействия вождению посредством управления генератором 15 тормозной силы, генератором 16 силы реакции педали, сигнализацией 17 и генератором 14 движущей силы.
[0012]
Детекторы 13 препятствий обнаруживают помеху X вокруг транспортного средства 1. Детекторы 13 препятствий в настоящем варианте осуществления являются датчиками, установленными на транспортном средстве 1, такими как сонар или лазерные дальномеры, и испускают излучаемые волны, к примеру электромагнитные волны и звуковые волны, в предварительно определенную область и принимают отраженные волны. Следует отметить, что детекторы 13 препятствий могут быть камерами для съемки видео предварительно определенной области. В настоящем варианте осуществления, хотя поясняется пример, в котором объектом управления детекторов 13 препятствий является препятствие X позади транспортного средства X, возможно то, что препятствие впереди или около транспортного средства 1 может быть объектом управления.
[0013]
Модуль 100 извлечения информации транспортного средства
Модуль 100 извлечения информации транспортного средства извлекает информацию транспортного средства 1. Как показано на фиг. 3, модуль 100 извлечения информации транспортного средства в настоящем варианте осуществления включает в себя модуль 102 вычисления скорости транспортного средства, детектор 106 операций переключения, модуль 108 вычисления угла руления, модуль 110 вычисления ускорения и модуль 111 вывода информации транспортного средства.
Модуль 102 вычисления скорости транспортного средства вычисляет скорость транспортного средства на основе скоростей колес (скоростей вращения ходовых колес), обнаруживаемых посредством датчиков 11 скоростей колес, и диаметров шин транспортного средства 1. При вычислении скорости транспортного средства при необходимости могут выполняться процесс фильтрации или процесс усреднения. Помимо этого, модуль 102 вычисления скорости транспортного средства вычисляет пройденное расстояние транспортного средства 1 посредством интегрирования скорости транспортного средства.
[0014]
Детектор 106 операций переключения обнаруживает операцию пассажира с командным переключателем 3. Детектор 106 операций переключения также обнаруживает операцию с пусковым переключателем 8.
Пусковой переключатель 8 управляется пассажиром, чтобы выдавать команду на активацию/деактивацию приводного устройства при начале/завершении вождения транспортного средства 1. Например, в случае если приводная установка является двигателем внутреннего сгорания, пусковой переключатель 18 является переключателем зажигания для запуска/остановки двигателя внутреннего сгорания. В случае если транспортное средство 1 является электромобилем и приводная установка является электромотором(ами), пусковой переключатель 18 является переключателем для запуска/остановки электромотора. В случае если транспортное средство 1 является гибридным электромобилем, и приводная установка является электромотором и двигателем внутреннего сгорания, пусковой переключатель 18 является переключателем для запуска/остановки главного приводного источника, т.е. любого из электромотора и двигателя внутреннего сгорания.
[0015]
Модуль 108 вычисления угла руления вычисляет угол руления рулевого колеса из датчика 10 руления. В этом отношении угол руления обрабатывается посредством процесса фильтрации при необходимости.
Модуль 110 вычисления ускорения вычисляет ускорение транспортного средства 1 из датчика 12 ускорения. В этом отношении ускорение обрабатывается посредством процесса фильтрации при необходимости.
[0016]
Модуль 111 вывода информации транспортного средства выводит скорость транспортного средства (пройденное расстояние), вычисленную посредством модуля 102 вычисления скорости транспортного средства, ход педали ускорения из датчика 5 хода педали ускорения, ход педали тормоза из датчика 6 хода педали тормоза, диапазон переключения из датчика 9 положения переключения, операционные статусы командного переключателя 3 и пускового переключателя 18, обнаруженные посредством детектора 106 операций переключения, угол руления, вычисленный посредством модуля 108 вычисления угла руления, и ускорение транспортного средства, вычисленное посредством модуля 110 вычисления ускорения, в модуль 400 выбора статуса системы и модуль 500 вычисления информации определения.
Следует отметить, что модуль 100 извлечения информации транспортного средства может извлекать другую информацию транспортного средства. Помимо этого, согласно конфигурации системы он может быть сконфигурирован с возможностью не извлекать информацию, необязательную в конфигурации системы.
[0017]
Модуль 200 извлечения информации окружения
Как показано на фиг. 4, модуль 200 извлечения информации окружения включает в себя модуль 201 извлечения информации препятствий, модуль 202 вычисления относительной скорости, модуль 203 вычисления относительного расстояния (средство обнаружения расстояния), модуль 204 определения препятствий, детектор 206 состояния парковки и модуль 205 вывода информации окружения.
Модуль 201 извлечения информации препятствий извлекает время от излучения излученной волны до приема отраженной волны (в дальнейшем в этом документе, упоминается как время отражения).
[0018]
Модуль 203 вычисления относительного расстояния вычисляет относительное расстояние от препятствия вокруг транспортного средства 1 (расстояние от транспортного средства 1 до препятствия X) на основе времени отражения. Здесь модуль 203 вычисления относительного расстояния может обнаруживать форму препятствия X посредством вычисления расстояний до нескольких точек на препятствии X. Следует отметить, что если детекторы 13 препятствий являются камерами, относительное расстояние может быть вычислено на основе положения препятствия X в пределах кадра снятого изображения. Помимо этого, модуль 203 вычисления относительного расстояния при необходимости может управлять процессом фильтрации, таким как уменьшение шума. Следует отметить, что если обнаруживается несколько препятствий, модуль 203 вычисления относительного расстояния вычисляет относительное расстояние от препятствия, ближайшего к транспортному средству 1, которое указывается в качестве препятствия X объекта управления.
[0019]
Модуль 202 вычисления относительной скорости вычисляет относительное расстояние от препятствия X до транспортного средства 1 на основе времени отражения и вычисляет относительную скорость препятствия X, дифференцируя относительное расстояние. Следует отметить, что относительная скорость может быть вычислена из частоты отраженной волны, если детекторы 13 препятствий являются радарами диапазона миллиметровых волн, и тем самым вычисление относительного расстояния необходимо в этом случае. Следует отметить, что модуль 202 вычисления относительной скорости может вычислять относительную скорость на основе относительного расстояния, вычисленного посредством модуля 203 вычисления относительного расстояния. Помимо этого, модуль 202 вычисления относительной скорости при необходимости может управлять процессом фильтрации, таким как уменьшение шума.
[0020]
Модуль 204 определения препятствий определяет то, существует или нет препятствие, на основе времени отражения. Например, если время отражения является бесконечным (т.е. отсутствует обнаружение отраженной волны) либо равно или превышает предварительно определенное время, модуль 204 определения препятствий определяет то, что препятствия X не существует. Если время отражения меньше предварительно определенного времени, модуль 204 определения препятствий определяет то, что препятствие X существует.
[0021]
Детектор 206 состояния парковки обнаруживает расстояние от текущего положения до целевого положения парковки. Помимо этого, детектор 206 состояния парковки извлекает текущее положение, измеряемое посредством GPS и картографической информации, из навигационной системы и определяет то, находится или нет транспортное средство 1 на автостоянке (парковке). А именно, обнаруживается положение на карте, соответствующее измеренному текущему положению, и определяется то, находится или нет обнаруженное положение на автостоянке на карте. Расстояние от текущего положения до целевого положения парковки и результат определения того, находится или нет транспортное средство 1 на автостоянке, выводятся в модуль 205 вывода информации окружения.
Модуль 205 вывода информации окружения выводит значения (информацию) из модуля 202 вычисления относительной скорости, модуля 203 вычисления относительного расстояния, модуля 204 определения препятствий и детектора 206 состояния парковки в модуль 400 выбора статуса системы и модуль 500 вычисления информации определения.
[0022]
Главный контроллер 300
Как показано на фиг. 2, главный контроллер 300 включает в себя модуль 600 содействия операции парковки (средство содействия операции парковки) в дополнение к модулю 400 выбора статуса системы и модулю 500 вычисления информации определения. Модуль 600 содействия операции парковки включает в себя модуль 610 определения торможения, тормозной контроллер 620, модуль 630 определения силы реакции педали, контроллер 640 силы реакции педали, модуль 650 определения сигнализации, контроллер 660 сигнализации, модуль 670 определения движущей силы и контроллер 680 движущей силы.
[0023]
Модуль 400 выбора статуса системы
Модуль 400 выбора статуса системы устанавливает статус системы, который указывает то, выполнять или нет управление содействием вождению, как "статус ВКЛЮЧЕНО (ST-FLAG=ВКЛЮЧЕНО)" или "статус ВЫКЛЮЧЕНО (ST-FLAG=ВЫКЛЮЧЕНО)", на основе рабочего состояния командного переключателя 3 из детектора 106 операций переключения модуля 100 извлечения информации транспортного средства.
[0024]
Модуль 500 вычисления информации определения
Модуль 500 вычисления информации определения выполняет вычисления относительно нижеописанной информации определения, когда удовлетворяются оба условия (1) и (2), упомянутые ниже по тексту.
(1) диапазон переключения устанавливается равным R-диапазону (диапазону передач для движения задним ходом)
(2) статус системы является статусом ВКЛЮЧЕНО
В настоящем варианте осуществления объектом является препятствие X, присутствующее позади транспортного средства 1, так что устанавливается вышеуказанное условие (1). Если препятствие X, присутствующее впереди транспортного средства 1, также является объектом, вышеуказанное условие (1) может быть изменено на "диапазон переключения устанавливается равным D-диапазону или R-диапазону".
Помимо этого, по меньшей мере одно условие из "скорость транспортного средства<предварительно установленной скорости транспортного средства" и "угол руления<предварительно установленного угла руления" может добавляться к вышеуказанному условию (2).
[0025]
Модуль 500 вычисления информации определения выполняет установку расстояния начала управления и определения ограничения. Как показано на фиг. 5, модуль 500 вычисления информации определения включает в себя модуль 510 вычисления целевого расстояния остановки, модуль 520 вычисления рабочего расстояния торможения, модуль 530 вычисления рабочего расстояния силы реакции педали, модуль 540 вычисления рабочего расстояния сигнализации, модуль 550 вычисления рабочего расстояния движущей силы и модуль 560 вычисления хода выполнения парковки (средство уменьшения величины управления содействием).
Модуль 510 вычисления целевого расстояния остановки вычисляет целевое расстояние Ls остановки. Целевое расстояние остановки является предварительно установленным значением и может варьироваться согласно скорости транспортного средства, например, может устанавливаться большим по мере того, как скорость транспортного средства становится более высокой.
[0026]
Модуль 520 вычисления рабочего расстояния торможения вычисляет рабочее расстояние Lsb торможения для начала торможения посредством управления содействием вождению. В модуле 520 вычисления рабочего расстояния торможения в настоящем варианте осуществления, рабочее расстояние Lsb торможения вычисляется посредством суммирования рабочего расстояния согласно скорости транспортного средства с целевым расстоянием Ls остановки, как показано в уравнении (I), показанном ниже по тексту.
(рабочее расстояние Lsb торможения)=(целевое расстояние Ls остановки)+(рабочее расстояние согласно скорости транспортного средства)... (I)
Здесь "рабочее расстояние согласно скорости транспортного средства" является большим значением по мере того, как скорость транспортного средства становится больше, так что транспортное средство 1 принудительно останавливается на расстоянии, близком к целевому расстоянию Ls остановки. Следует отметить, что "рабочее расстояние согласно скорости транспортного средства" может варьироваться согласно относительному времени между транспортным средством 1 и препятствием X, которое может быть вычислено из относительного расстояния и относительной скорости для препятствия X.
[0027]
Модуль 530 вычисления рабочего расстояния силы реакции педали вычисляет рабочее расстояние Lsa силы реакции педали для начала приложения силы реакции к педали ускорения посредством управления содействием вождению. В модуле 530 вычисления рабочего расстояния силы реакции педали в настоящем варианте осуществления, рабочее расстояние Lsa силы реакции педали вычисляется посредством суммирования расстояния холостого хода согласно скорости транспортного средства с рабочим расстоянием Lsb торможения, как показано в уравнении (II), показанном ниже по тексту.
(рабочее расстояние Lsa силы реакции педали)=(рабочее расстояние Lsb торможения)+(расстояние холостого хода согласно скорости транспортного средства)... (II)
[0028]
Модуль 540 вычисления рабочего расстояния сигнализации вычисляет рабочее расстояние Lsh сигнализации для начала сигнализации посредством управления содействием вождению. В модуле 540 вычисления рабочего расстояния сигнализации в настоящем варианте осуществления, рабочее расстояние Lsh сигнализации вычисляется посредством суммирования расстояния холостого хода согласно скорости транспортного средства с рабочим расстоянием Lsb торможения, как показано в уравнении (III), показанном ниже по тексту.
(рабочее расстояние Lsh сигнализации)=(рабочее расстояние Lsb торможения)+(расстояние холостого хода согласно скорости транспортного средства)... (III)
[0029]
Модуль 550 вычисления рабочего расстояния движущей силы вычисляет рабочее расстояние Lsf движущей силы для начала ограничения движущей силы посредством управления содействием вождению. В модуле 550 вычисления рабочего расстояния движущей силы в настоящем варианте осуществления, рабочее расстояние Lsf движущей силы вычисляется посредством суммирования расстояния холостого хода согласно скорости транспортного средства с рабочим расстоянием Lsb торможения, как показано в уравнении (IV), показанном ниже по тексту.
(рабочее расстояние Lsf движущей силы)=(рабочее расстояние Lsb торможения)+(расстояние холостого хода согласно скорости транспортного средства)... (IV)
Следовательно, в настоящем варианте осуществления, расстояние начала (рабочее расстояние содействия) для каждого из управлений устанавливается так, как пояснено выше по тексту, так что когда транспортное средство 1 приближается к препятствию X, сначала выполняется ограничение движущей силы, сигнализация водителю и приложение силы реакции к педали ускорения, и после этого выполняется приложение тормозной силы.
[0030]
Модуль 560 вычисления хода выполнения парковки
На основе информации из модуля 100 извлечения информации транспортного средства и модуля 200 извлечения информации окружения, модуль 560 вычисления хода выполнения парковки определяет то, движется или нет транспортное средство 1 в целевое положение парковки, и после этого, если движется, определяет то, ограничивать или нет управление содействием вождению. Как показано на фиг. 6, модуль 560 вычисления хода выполнения парковки включает в себя модуль 561 определения начала парковки (средство определения парковки), модуль 562 определения хода выполнения парковки (средство определения хода выполнения парковки) и модуль 563 вычисления прироста в ходе выполнения, и процессы выполняются в этом порядке.
[0031]
Модуль 561 определения начала парковки выполняет определение для начала парковки и определение того, движется или нет транспортное средство в целевое положение парковки.
Во-первых, модуль 561 определения начала парковки определяет то, что парковка начинается, когда удовлетворяется любое из условий (a) и (b), упомянутых ниже по тексту.
(a) Область для парковки (парковочная рамка) обнаруживается на виде сверху, отображаемом посредством устройства 22 содействия парковке, и диапазон переключения устанавливается равным диапазону движения задним ходом (R).
(b) Намерение парковки обнаруживается из операции пассажира (например, пассажир указывает целевое положение парковки на виде сверху, отображаемом посредством устройства 22 содействия парковке).
Следует отметить, что вышеуказанное определение начала парковки может быть выполнено только тогда, когда определяется, на основе информации из навигационной системы 20, что транспортное средство 1 находится на автостоянке (парковке).
[0032]
Помимо этого, в случае, если устройство 22 содействия парковке не установлено или не работает, то, что парковка начинается, может быть определено, когда удовлетворяется условие (c), упомянутое ниже по тексту.
(c) Диапазон переключения устанавливается равным диапазону движения задним ходом (R), и до того как диапазон переключения установлен равным диапазону движения задним ходом (R), транспортное средство 1 движется вперед в диапазоне переднего хода (D) на расстояние, превышающее предварительно определенное расстояние (например, 5 м), или в течение более чем предварительно определенного времени (например, 5 минут) [но только в случае, если время, требуемое для изменения с диапазона переднего хода (D) на диапазон движения задним ходом (R), занимает предварительно определенное время (например, 5 минут)].
[0033]
Затем модуль 561 определения начала парковки определяет то, что парковка завершена, т.е. что транспортное средство 1 не движется в целевое положение парковки, когда удовлетворяется любое из условий (d)-(f), упомянутых ниже по тексту. Следовательно, со времени, когда модуль 561 определения начала парковки определяет то, что парковка начата, до времени, когда он определяет то, что удовлетворяется любое из условий (e)-(f), определяется то, что транспортное средство 1 движется в целевое положение парковки.
(d) Парковка завершается [подробно поясняется ниже по тексту].
(e) Транспортное средство 1 останавливается в течение предварительно определенного времени.
(f) Диапазон переключения устанавливается равным диапазону отсутствия движения (P или N).
[0034]
Здесь вышеуказанное условие (d) удовлетворяется, когда текущее положение транспортного средства 1 совпадает с целевым положением для парковки. А именно, вышеуказанное условие (d) удовлетворяется, когда предварительно определенное время истекло после того, как расстояние от текущего положения до целевого положения парковки, которое обнаружено устройством 22 содействия парковке и затем выведено из модуля 200 извлечения информации окружения, становится равным 0 (или меньшим предварительно определенного значения, которое можно рассматривать как почти 0). Следует отметить, что то, что вышеуказанное условие (d) удовлетворяется, может быть определено, когда расстояние от текущего положения до целевого положения парковки не изменяется в течение предварительно определенного времени. В качестве альтернативы, то, что вышеуказанное условие (d) удовлетворяется, может быть определено, когда предварительно определенное время истекло после того, как скорость транспортного средства, которая вычислена посредством модуля 102 вычисления скорости транспортного средства и затем выведена из модуля 100 извлечения информации транспортного средства, становится равной 0 (или меньшей предварительно определенного значения, которое можно рассматривать как почти 0).
[0035]
Пример процессов, выполняемых посредством модуля 561 определения начала парковки, поясняется со ссылкой на фиг. 15. Модуль 561 определения начала парковки обнаруживает парковочную рамку и определяет то, изменяется или нет диапазон переключения (положение переключения) на диапазон движения задним ходом (R) (этап S100). Последовательность операций обработки переходит к этапу S130, если результат этапа S100 положительный [удовлетворяется вышеуказанное условие (a)], или переходит к этапу S110, если результат отрицательный.
[0036]
Когда результат этапа S100 положительный, определяется то, определено или нет намерение пассажира выполнять парковку (этап S110). Последовательность операций обработки переходит к этапу S130, если результат этапа S110 положительный [удовлетворяется вышеуказанное условие (b)], или переходит к этапу S120, если результат отрицательный.
Когда результат этапа S110 отрицательный, определяется то, изменяется или нет диапазон переключения на диапазон движения задним ходом (R) после того, как транспортное средство 1 движется вперед в диапазоне переднего хода (D) на превышающее предварительно определенное расстояние или в течение более чем предварительно определенного времени. Последовательность операций обработки переходит к этапу S130, если результат этапа S120 положительный [удовлетворяется вышеуказанное условие (c)], или переходит к этапу S140, если результат отрицательный.
[0037]
Когда результат любого из этапов S100-S120 положительный [удовлетворяется любое из вышеуказанных условий (a)-(c)], флаг начала парковки устанавливается на ВКЛЮЧЕНО (этап S130). Когда флаг начала парковки устанавливается на ВКЛЮЧЕНО на этапе S130, или когда результат этапа S140 отрицательный [не удовлетворяются вышеуказанные условия (a)-(c)], определяется то, установлен или нет диапазон переключения равным диапазону отсутствия движения (P или N) (этап S140). Последовательность операций обработки переходит к этапу S170, если результат этапа S140 положительный [удовлетворяется вышеуказанное условие (f)], или переходит к этапу S150, если результат отрицательный.
Когда результат этапа S140 отрицательный, определяется то, останавливается или нет транспортное средство 1 в течение предварительно определенного времени (этап S150). Последовательность операций обработки переходит к этапу S170, если результат этапа S150 положительный [удовлетворяется вышеуказанное условие (e)], или переходит к этапу S160, если результат отрицательный.
[0038]
Когда результат этапа S150 отрицательный, определяется то, удовлетворяется или нет какое-либо из трех упомянутых ниже по тексту условий (этап S160).
- Условие, при котором расстояние от текущего положения до целевого положения парковки меньше предварительно определенного расстояния (расстояние можно рассматривать как 0).
- Условие, при котором расстояние от текущего положения до целевого положения парковки не изменяется в течение предварительно определенного времени.
- Условие, при котором предварительно определенное время истекло в состоянии при скорости транспортного средства, меньшей предварительно определенной скорости (скорость транспортного средства можно рассматривать как 0).
Последовательность операций обработки переходит к этапу S170, если результат этапа S160 положительный [удовлетворяется вышеуказанное условие (d)], или переходит к этапу S180, если результат отрицательный.
[0039]
Когда результат любого из этапов S140-S160 положительный [удовлетворяется любое из условий (d)-(f)], флаг завершения парковки устанавливается на ВКЛЮЧЕНО (этап S170), и последовательность операций обработки переходит к этапу S190.
С другой стороны, когда результат этапа S160 отрицательный [не удовлетворяются условия (d)-(f)], последовательность операций обработки переходит к этапу S190.
После того, как флаг парковки установлен на этапе S170 или S180, определяется то, установлен или нет флаг завершения парковки на ВКЛЮЧЕНО (этап S190). Последовательность операций обработки переходит к этапу S200, если флаг завершения парковки установлен на ВКЛЮЧЕНО, или завершается и после этого снова начинается с этапа S100 в случае, если установлен на ВЫКЛЮЧЕНО.
[0040]
Когда модуль 561 определения начала парковки определяет то, что парковка начинается, модуль 562 определения хода выполнения парковки определяет степень выполнения парковки от начала парковки (начала движения) до завершения парковки (завершения движения) транспортного средства 1. Как показано на фиг. 6, модуль 562 определения хода выполнения парковки включает в себя модуль 562a определения хода выполнения по расстоянию, модуль 562b определения хода выполнения по углу, модуль 562c определения хода выполнения по рулению и модуль 562d определения хода выполнения по времени.
[0041]
Модуль 562a определения хода выполнения по расстоянию определяет степень выполнения парковки на основе пройденного расстояния от начала парковки транспортного средства 1.
Процессы, выполняемые модулем 562a определения хода выполнения по расстоянию, поясняются со ссылкой на фиг. 7. Модуль 562a определения хода выполнения по расстоянию извлекает расстояние d0 от положения начала парковки до целевого положения парковки на основе информации из устройства 22 содействия парковке (этап S10). А именно, он извлекает, в качестве расстояния d0, расстояние от положения начала парковки до целевого положения парковки, обнаруженного устройством 22 содействия парковке во время, когда определяется то, что парковка начинается. Целевое положение парковки задается и устанавливается равным положению обнаруженной парковочной рамки или целевому положению парковки, указываемому пассажиром. Если целевое положение парковки не может указываться, предварительно определенное расстояние (например, 5 м) устанавливается как расстояние d0.
[0042]
Затем расстояние d1 от положения начала парковки до текущего положения транспортного средства 1 извлекается (этап S20). Здесь расстояние d0 от положения начала парковки до целевого положения парковки может быть кратчайшим расстоянием (линейным расстоянием) или расстоянием вдоль пути движения, вычисленного посредством устройства 22 содействия парковке от текущего положения до целевого положения парковки. То же самое касается расстояния d1. Тем не менее, когда расстояние d0 использует кратчайшее расстояние, расстояние d1 аналогичным образом также должно использовать кратчайшее расстояние. В качестве альтернативы, когда расстояние d0 использует расстояние вдоль пути движения, расстояние d1 аналогичным образом также должно использовать расстояние вдоль пути движения.
После этапа S20 первая степень d выполнения парковки вычисляется на основе уравнения (V), показанного ниже по тексту. Первая степень d выполнения парковки (≤1) принимает меньшее значение по мере приближения к завершению парковки.
d=(d0-d1)/d0... (V)
[0043]
Пример процессов, выполняемых модулем 562a определения хода выполнения по расстоянию, поясняется со ссылкой на фиг. 16. Следует отметить, что пример процессов выполняется после вышеописанного примера процессов модуля 561 определения начала парковки, показанного на фиг. 15. Нижеописанные процессы, показанные на фиг. 17-19, аналогичным образом также выполняются после вышеописанного примера процессов модуля 561 определения начала парковки, показанного на фиг. 15.
[0044]
Модуль 562a определения хода выполнения по расстоянию определяет то, изменяется или нет флаг начала парковки с выключенного на включенный (этап S210). Последовательность операций обработки переходит к этапу S220, если результат этапа S210 положительный, или переходит к этапу S260, если результат отрицательный. Следует отметить, что флаг начала парковки устанавливается посредством модуля 561 определения начала парковки, как пояснено выше по тексту.
Когда результат этапа S210 положительный, определяется то, указывается или нет целевое положение парковки (этап S220). Последовательность операций обработки переходит к этапу S230, если результат этапа S220 положительный, или переходит к этапу S240, если результат отрицательный.
[0045]
Когда результат этапа S220 положительный, расстояние до указанного целевого положения парковки устанавливается как расстояние d0 (этап S230), и после этого последовательность операций обработки переходит к этапу S250. С другой стороны, когда результат этапа S220 отрицательный, предварительно определенное расстояние (например, 5 м) задается как расстояние d0 (этап S240), и после этого последовательность операций обработки переходит к этапу S250.
Затем на этапе S240 или S250, положение начала парковки сохраняется (этап S250), и последовательность операций обработки переходит к этапу S260. Затем на этапе S250 определяется то, включен или нет флаг начала парковки (этап S260). Последовательность операций обработки переходит к этапу S270, если результат этапа S260 положительный, или переходит к этапу S290, если результат отрицательный.
[0046]
Когда результат этапа S260 положительный, расстояние от положения начала парковки до текущего положения транспортного средства 1 устанавливается как расстояние d1 (этап S270). Затем первая степень d выполнения парковки вычисляется посредством вышеприведенного уравнения (V) (этап S280). Далее последовательность операций обработки завершается и после этого снова начинается с этапа S210.
С другой стороны, когда результат этапа S260 отрицательный, выполняется процесс инициализации (этап S290). В частности, первая степень d выполнения парковки устанавливается равной "1", и положение начала парковки и расстояния d0 и d1 инициализируются. Далее последовательность операций обработки завершается и после этого снова начинается с этапа S210.
[0047]
Помимо этого, модуль 562b определения хода выполнения по углу вычисляет вторую степень θ выполнения парковки на основе ориентации транспортного средства 1 относительно целевого положения парковки. В частности, модуль 562b определения хода выполнения по углу вычисляет, в качестве второй степени θ выполнения парковки, угол направления движения транспортного средства 1 в целевое положение парковки.
Как показано на фиг. 8, вторая степень θ выполнения парковки составляет угол текущего направления движения транспортного средства 1 на основе ориентации (направления вперед-назад) транспортного средства 1, которое должно быть остановлено в целевом положении парковки. Она может быть вычислена посредством обнаружения угла направления движения транспортного средства 1 к направлению прохождения линии парковочной рамки, обнаруженной устройством 22 содействия парковке. В общем, линия парковочной рамки наносится на поверхность дороги в качестве сегментированной линии вдоль направления вперед-назад транспортного средства в целевом положении парковки. Следовательно, аналогично известному способу для обнаружения линии, разделяющей полосы движения, нанесенные на дорожные полосы, линия парковочной рамки может быть обнаружена посредством обработки изображения, снятого камерой 22, с помощью процесса обработки краев. Линия парковочной рамки, обнаруженная так, как пояснено выше по тексту, преобразуется в вид сверху, и может быть обнаружен угол направления движения транспортного средства 1 к линии парковочной рамки. Также в случае, если пассажир может указывать целевое положение парковки (линию парковочной рамки), может быть обнаружен угол направления движения транспортного средства 1 к указанной линии парковочной рамки.
Вторая степень θ выполнения парковки (<90 градусов) принимает меньшее значение по мере приближения к завершению парковки.
[0048]
Пример процессов модуля 562b определения хода выполнения по углу поясняется со ссылкой на фиг. 17.
Модуль 562b определения хода выполнения по углу определяет то, изменяется или нет флаг начала парковки с выключенного на включенный (этап S310). Последовательность операций обработки переходит к этапу S320, если результат этапа S310 положительный, или переходит к этапу S350, если результат отрицательный.
Когда результат этапа S310 положительный, определяется то, указывается или нет линия парковочной рамки (этап S320). Последовательность операций обработки переходит к этапу S330, если результат этапа S320 положительный, или переходит к этапу S340, если результат отрицательный.
Указанная линия парковочной рамки устанавливается, когда результат этапа S320 положительный (этап S330), или предварительно установленная линия парковочной рамки устанавливается, если результат отрицательный (этап S340). После этапа S330 или S340 последовательность операций обработки переходит к этапу S350.
[0049]
После этапа S330 или S340 определяется то, включен или нет флаг начала парковки (этап S350). Последовательность операций обработки переходит к этапу S360, если результат этапа S350 положительный, или переходит к этапу S370, если результат отрицательный.
Когда результат этапа S350 положительный, угол направления движения транспортного средства 1 к линии парковочной рамки устанавливается как вторая степень θ выполнения парковки (этап S360). Далее последовательность операций обработки завершается и после этого снова начинается с этапа S310.
С другой стороны, когда результат этапа S350 отрицательный, выполняется процесс инициализации (этап S370). В частности, вторая степень θ выполнения парковки устанавливается равной "90 градусов", и линия парковочной рамки также инициализируется. Далее последовательность операций обработки завершается и после этого снова начинается с этапа S310.
[0050]
Помимо этого, модуль 562c определения хода выполнения по рулению вычисляет накопленную величину варьирования угла руления от начала парковки в качестве третьей степени δ выполнения парковки. Третья степень δ выполнения парковки принимает большее значение по мере приближения к завершению парковки.
Пример процессов модуля 562c определения хода выполнения по рулению поясняется со ссылкой на фиг. 18.
Модуль 562c определения хода выполнения по рулению определяет то, изменяется или нет флаг начала парковки с выключенного на включенный (этап S410). Последовательность операций обработки переходит к этапу S420, если результат этапа S410 положительный, или переходит к этапу S430, если результат отрицательный.
Когда результат этапа S410 положительный, накопленная величина варьирования угла руления устанавливается как третья степень δ выполнения парковки (этап S420). Далее последовательность операций обработки завершается и после этого снова начинается с этапа S410.
С другой стороны, когда результат этапа S410 отрицательный, выполняется процесс инициализации (этап S430). В частности, третья степень δ выполнения парковки устанавливается равной "0". Далее последовательность операций обработки завершается и после этого снова начинается с этапа S410.
[0051]
Помимо этого, модуль 562d определения хода выполнения по времени вычисляет истекшее время от парковки в качестве четвертой степени t выполнения парковки. Чем больше четвертая степень t выполнения парковки, тем ближе к завершению парковки.
Пример процессов модуля 562d определения хода выполнения по времени поясняется со ссылкой на фиг. 19.
Модуль 562d определения хода выполнения по времени определяет то, изменяется или нет флаг начала парковки с выключенного на включенный (этап S510). Последовательность операций обработки переходит к этапу S520, если результат этапа S510 положительный, или переходит к этапу S530, если результат отрицательный.
Когда результат этапа S510 положительный, истекшее время устанавливается как четвертая степень t выполнения парковки (этап S520). Далее последовательность операций обработки завершается и после этого снова начинается с этапа S510.
С другой стороны, когда результат этапа S350 отрицательный, выполняется процесс инициализации (этап S370). В частности, четвертая степень t выполнения парковки устанавливается равной "0". Далее последовательность операций обработки завершается и после этого снова начинается с этапа S510.
[0052]
Помимо этого, модуль 563 вычисления прироста в ходе выполнения вычисляет прирост β в ходе выполнения парковки на основе первой-четвертой степеней d, θ, δ и t выполнения парковки, вычисленных посредством модуля 562 определения хода выполнения парковки.
Как показано на фиг. 9, модуль 563 вычисления прироста в ходе выполнения вычисляет первый прирост α1 в ходе выполнения из первой степени d выполнения парковки. Первый прирост α1 в ходе выполнения (≤1) принимает меньшее значение по мере того, как уменьшается (приближается к завершению парковки) первая степень d выполнения парковки. Помимо этого, как показано на фиг. 10, модуль 563 вычисления прироста в ходе выполнения вычисляет второй прирост α2 в ходе выполнения из второй степени θ выполнения парковки. Второй прирост α2 в ходе выполнения (≤1) принимает меньшее значение по мере того, как уменьшается (приближается к завершению парковки) вторая степень θ выполнения парковки. Помимо этого, как показано на фиг. 11, модуль 563 вычисления прироста в ходе выполнения вычисляет третий прирост α3 в ходе выполнения из третьей степени δ выполнения парковки. Третий прирост α3 в ходе выполнения (≤1) принимает меньшее значение по мере того, как увеличивается (приближается к завершению парковки) третья степень δ выполнения парковки. Помимо этого, как показано на фиг. 12, модуль 563 вычисления прироста в ходе выполнения вычисляет четвертый прирост α4 в ходе выполнения из четвертой степени t выполнения парковки. Четвертый прирост α4 в ходе выполнения (≤1) принимает меньшее значение по мере того, как увеличивается (приближается к завершению парковки) четвертая степень t выполнения парковки.
[0053]
После этого, модуль 563 вычисления прироста в ходе выполнения вычисляет прирост β в ходе выполнения парковки на основе уравнения (VI), показанного ниже по тексту.
β=α1×α2×α3×α4... (VI)
Следовательно, когда определено, что транспортное средство движется в целевое положение парковки, βmin≤β<1. С другой стороны, когда определено, что транспортное средство не движется в целевое положение парковки, β=1. Следует отметить, что весовой коэффициент может устанавливаться равным вышеуказанным первому-четвертому приростам α1-α4 в ходе выполнения.
[0054]
Процессы, выполняемые модулем 563 вычисления прироста в ходе выполнения, поясняются со ссылкой на фиг. 20.
Модуль 563 вычисления прироста в ходе выполнения определяет то, изменяется или нет флаг начала парковки с выключенного на включенный (этап S610). Последовательность операций обработки переходит к этапу S620, если результат этапа S610 положительный, или переходит к этапу S680, если результат отрицательный.
Когда результат этапа S610 положительный, первый прирост α1 в ходе выполнения вычисляется из первой степени d выполнения парковки (этап S620). Затем второй прирост α2 в ходе выполнения вычисляется из второй степени θ выполнения парковки (этап S630). Затем третий прирост α3 в ходе выполнения вычисляется из третьей степени δ выполнения парковки (этап S640). Затем четвертый прирост α4 в ходе выполнения вычисляется из четвертой степени t выполнения парковки (этап S650). После этого, последовательность операций обработки переходит к этапу S660.
[0055]
После этапа S650 прирост β в ходе выполнения парковки вычисляется на основе вышеприведенного уравнения (VI) (этап S660). После этапа S660 приросты β1-β4 в ходе выполнения парковки вычисляются соответственно на основе уравнения (VII), показанного ниже по тексту (этапа S670). Далее последовательность операций обработки завершается и после этого снова начинается с этапа S610. Здесь ki является предварительно установленной регулирующей константой для каждого управления (торможение, приложение силы реакции педали, сигнализация и ограничение движущей силы).
βi=ki×β (i=1-4)... (VII)
С другой стороны, когда результат этапа S610 отрицательный, инициализируется прирост β в ходе выполнения парковки (этап S680). В частности, прирост β в ходе выполнения парковки устанавливается равным "1". После этапа S680 инициализируются приросты β1-β4 в ходе выполнения парковки (этап S690). В частности, приросты β1-β4 в ходе выполнения парковки устанавливаются равными "1" соответственно. Далее последовательность операций обработки завершается и после этого снова начинается с этапа S610.
[0056]
Модуль 600 содействия операции парковки
Модуль 610 определения торможения сравнивает относительное расстояние от препятствия X до транспортного средства 1, выводимое из модуля 200 извлечения информации окружения, с рабочим расстоянием Lsb торможения, установленным посредством модуля 520 вычисления рабочего расстояния торможения, чтобы определять то, удовлетворяется или нет условие (i), показанное ниже по тексту. Когда условие (i) удовлетворяется, модуль 610 определения торможения выводит в тормозной контроллер 620 операционную команду, чтобы прикладывать тормозную силу для содействия вождению.
(рабочее расстояние Lsb торможения)>(относительное расстояние от препятствия X до транспортного средства 1)... (i)
[0057]
Здесь, когда прирост β в ходе выполнения парковки меньше 1, т.е. определяется то, что транспортное средство 1 движется, вывод операционной команды запрещается. В качестве альтернативы, определение на предмет вышеуказанного условия (i) выполняется на основе компенсированного рабочего расстояния Lsb торможения, вычисленного посредством умножения рабочего расстояния Lsb торможения на прирост β1 (<1). Прирост β1 вычисляется посредством вышеприведенного уравнения (VII), как показано ниже по тексту. Здесь k1 является предварительно установленной регулирующей константой.
β1=k1×β... (VII)
[0058]
Следует отметить, что, поскольку модуль 200 извлечения информации окружения обнаруживает относительное расстояние от препятствия, ближайшего к транспортному средству 1, которое указывается в качестве препятствия X объекта управления, когда существует несколько препятствий, относительное расстояние от препятствия до транспортного средства 1, выводимое из модуля 200 извлечения информации окружения, является относительным расстоянием до ближайшего препятствия X.
[0059]
Тормозной контроллер 620 принимает операционную команду из модуля 610 определения торможения и после этого выполняет управление приложением тормозной силы для содействия вождению, как пояснено ниже по тексту.
При начале работы значение команды тормозного давления увеличивается с предварительно установленной скоростью увеличения до тех пор, пока оно не достигнет предварительно установленного целевого значения команды. Когда значение команды тормозного давления увеличивается до целевого значения команды, тормозное давление посредством целевого значения команды поддерживается. Затем, когда предварительно установленное время истекло после того, как обнаружена остановка транспортного средства 1 (скорость транспортного средства=0), значение команды тормозного давления уменьшается с предварительно установленной скоростью уменьшения.
[0060]
Целевое значение команды, скорость увеличения и скорость уменьшения, поясненные выше по тексту, могут быть изменены согласно скорости транспортного средства транспортного средства 1, относительной скорости препятствия X или оцененному времени для вхождения транспортного средства 1 в контакт с препятствием X (TTC [время до контакта]).
Здесь управление торможением посредством содействия вождению прекращается, когда обнаружено, что водитель управляет педалью тормоза посредством равного или превышающего предварительно определенный ход на основе хода педали тормоза, выводимого из модуля 100 извлечения информации транспортного средства, или когда осуществляется другое управление торможением, которое имеет более высокий приоритет, чем приоритет управления содействием вождению.
Генератор 15 тормозной силы генерирует тормозное давление с тем, чтобы регулировать его до целевого значения команды, вычисленного посредством тормозного контроллера 620.
[0061]
Помимо этого, модуль 630 определения силы реакции педали сравнивает относительное расстояние от препятствия X до транспортного средства 1, выводимое из модуля 200 извлечения информации окружения, с рабочим расстоянием Lsa силы реакции педали, установленным посредством модуля 530 вычисления рабочего расстояния силы реакции педали, и определяет то, удовлетворяется или нет условие (ii), показанное ниже по тексту. Когда условие (ii) удовлетворяется, модуль 630 определения силы реакции педали выводит в контроллер 640 силы реакции педали операционную команду для приложения силы реакции педали к педали ускорения посредством содействия вождению.
(рабочее расстояние Lsa силы реакции педали)>(относительное расстояние от препятствия X до транспортного средства 1)... (ii)
[0062]
Здесь, когда прирост β в ходе выполнения парковки меньше 1, т.е. определяется то, что транспортное средство 1 движется, вывод операционной команды для приложения силы реакции педали посредством содействия вождению запрещается. В качестве альтернативы, определение на предмет вышеуказанного условия (ii) выполняется на основе компенсированного рабочего расстояния Lsa силы реакции педали, вычисленного посредством умножения рабочего расстояния Lsa силы реакции педали на прирост β2 (<1). Прирост β2 вычисляется посредством вышеприведенного уравнения (VII), как показано ниже по тексту. Здесь k2 является предварительно установленной регулирующей константой.
β2=k2×β... (VII)
[0063]
Контроллер 640 силы реакции педали принимает операционную команду из модуля 630 определения силы реакции педали и после этого выполняет управление приложением силы реакции педали для содействия вождению, как пояснено ниже по тексту.
При начале работы значение команды силы реакции увеличивается с предварительно установленной скоростью увеличения до тех пор, пока оно не достигнет предварительно установленного целевого значения команды. Когда значение команды силы реакции увеличивается до целевого значения команды, сила реакции посредством целевого значения команды поддерживается. Затем,, когда предварительно установленное время истекло после того, как обнаружена остановка транспортного средства 1 (скорость транспортного средства=0), значение команды силы реакции уменьшается с предварительно установленной скоростью уменьшения.
[0064]
Целевое значение команды, скорость увеличения и скорость уменьшения, поясненные выше по тексту, могут быть изменены согласно скорости транспортного средства транспортного средства 1, относительной скорости препятствия X или оцененному времени для вхождения транспортного средства 1 в контакт с препятствием X (TTC).
Генератор 16 силы реакции педали генерирует силу реакции педали так, чтобы регулировать ее до целевого значения команды, вычисленного посредством контроллера 640 силы реакции педали.
[0065]
Помимо этого, модуль 650 определения сигнализации сравнивает относительное расстояние от препятствия X до транспортного средства 1, выводимое из модуля 200 извлечения информации окружения, с рабочим расстоянием Lsh сигнализации, установленным посредством модуля 540 вычисления рабочего расстояния сигнализации, и определяет то, удовлетворяется или нет условие (iii), показанное ниже по тексту. Когда условие (iii) удовлетворяется, модуль 650 определения сигнализации выводит, в контроллер 660 сигнализации, операционную команду для сигнализации посредством содействия вождению.
(рабочее расстояние Lsh сигнализации)>(относительное расстояние от препятствия X до транспортного средства 1)... (iii)
[0066]
Здесь, когда прирост β в ходе выполнения парковки меньше 1, т.е. определяется то, что транспортное средство 1 движется, вывод операционной команды для сигнализации посредством содействия вождению запрещается. В качестве альтернативы, определение на предмет вышеуказанного условия (iii) выполняется на основе компенсированного рабочего расстояния Lsh сигнализации, вычисленного посредством умножения рабочего расстояния Lsh сигнализации на прирост β3 (<1). Прирост β3 вычисляется посредством вышеприведенного уравнения (VII), как показано ниже по тексту. Здесь k3 является предварительно установленной регулирующей константой.
β3=k3×β... (VII)
[0067]
Контроллер 660 сигнализации принимает операционную команду из модуля 650 определения сигнализации и после этого генерирует сигнал сигнализации для повторения выводов и прекращений звука сигнализации в течение предварительно определенного времени сигнализации.
Сигнализация 17 генерирует звук сигнализации на основе сигнала возбуждения сигнализации, вводимого из контроллера 660 сигнализации.
Следует отметить, что сигнализация 17 не ограничена сигнализацией, которая выводит звук, а может быть сконфигурирована с возможностью подавать сигнализацию посредством генерирования световых сигналов или вибраций сиденья.
[0068]
Помимо этого, модуль 670 определения движущей силы сравнивает относительное расстояние от препятствия X до транспортного средства 1, выводимое из модуля 200 извлечения информации окружения, с рабочим расстоянием Lsf движущей силы, установленным посредством модуля 550 вычисления рабочего расстояния движущей силы, и определяет то, удовлетворяется или нет условие (iv), показанное ниже по тексту. Когда условие (iv) удовлетворяется, модуль 670 определения движущей силы выводит в контроллер 680 движущей силы операционную команду для ограничения движущей силы посредством содействия вождению.
(рабочее расстояние Lsf движущей силы)>(относительное расстояние от препятствия X до транспортного средства 1)... (iv)
[0069]
Здесь, когда прирост β в ходе выполнения парковки меньше 1, т.е. обнаруживается то, что транспортное средство 1 движется, вывод операционной команды для ограничения движущей силы посредством содействия вождению запрещается. В качестве альтернативы, определение на предмет вышеуказанного условия (iv) выполняется на основе компенсированного рабочего расстояния Lsf движущей силы, вычисленного посредством умножения рабочего расстояния Lsf силы реакции педали на прирост β4 (<1). Прирост β4 вычисляется посредством вышеприведенного уравнения (VII), как показано ниже по тексту. Здесь k4 является предварительно установленной регулирующей константой.
β4=k4×β... (VII)
[0070]
Контроллер 680 движущей силы принимает операционную команду из модуля 670 определения движущей силы и после этого выполняет управление ограничением движущей силы для содействия вождению, как пояснено ниже по тексту.
При начале работы значение команды для величины уменьшения хода педали ускорения увеличивается с предварительно установленной скоростью увеличения до тех пор, пока оно не достигнет предварительно установленного целевого значения команды. Когда значение команды для величины уменьшения хода педали ускорения увеличивается до целевого значения команды, величина уменьшения хода педали ускорения посредством целевого значения команды поддерживается. Затем,, когда управление с использованием величины уменьшения хода педали ускорения для целевого значения команды продолжается в течение предварительно определенного времени, значение команды для величины уменьшения хода педали ускорения уменьшается с предварительно установленной скоростью уменьшения.
[0071]
Целевое значение команды, скорость увеличения и скорость уменьшения, поясненные выше по тексту, могут быть изменены согласно скорости транспортного средства транспортного средства 1, относительной скорости препятствия X или оцененному времени для вхождения транспортного средства 1 в контакт с препятствием X (TTC).
Здесь открытие дросселя двигателя вычисляется посредством уравнения (VIII), показанного ниже по тексту.
(открытие дросселя)=(рабочая величина хода педали ускорения)-(вычисленная величина уменьшения хода)... (VIII)
[0072]
Генератор 14 движущей силы управляет выводом приводного устройства транспортного средства 1 (здесь выходной мощностью двигателя) на основе открытия дросселя, вычисленного посредством контроллера 680 движущей силы.
[0073]
Следует отметить, что, хотя прирост β в ходе выполнения парковки вычисляется посредством умножения первого-четвертого приростов α1-α4 в ходе выполнения в вышеприведенном варианте осуществления, он не ограничен этим. Например, один из первого-четвертого приростов α1-α4 в ходе выполнения может устанавливаться как прирост β в ходе выполнения парковки. В качестве альтернативы, прирост β в ходе выполнения парковки может быть вычислен посредством умножения любых двух или более приростов из первого-четвертого приростов α1-α4 в ходе выполнения.
[0074]
Операции
Поясняется пример операций устройства 2 управления содействием парковке. Следует отметить, что командный переключатель включен, и система управления содействием вождению активирована. Помимо этого, парковка на автостоянке, показанной на фиг. 13 и 14, поясняется в качестве примера.
Когда диапазон переключения устанавливается равным диапазону движения задним ходом (R) для парковки с задним ходом из положения транспортного средства 1, показанного на фиг. 13, управление содействием вождению переводится в рабочее состояние (ST-FLG=ВКЛЮЧЕНО). Помимо этого, вид сверху отображается на устройстве отображения посредством устройства 22 содействия парковке. Когда одна из областей для парковки, отображаемых в виде сверху, указывается пассажиром, определяется то, что парковка начинается.
Затем детектор 13 препятствий (средство обнаружения препятствий) обнаруживает препятствие X (к примеру, другое транспортное средство и стену) позади транспортного средства 1. Помимо этого, модуль 203 вычисления относительного расстояния (средство обнаружения расстояния) вычисляет (обнаруживает) расстояние между обнаруженным препятствием X и транспортным средством 1 в предварительно определенных циклах управления.
[0075]
Модуль 600 содействия операции парковки многократно определяет в предварительно определенных циклах управления то, становится или нет расстояние до препятствия X равным или меньше расстояния начала операции, в то время как транспортное средство 1 движется задним ходом. После этого, когда расстояние до препятствия X становится равным или меньше расстояния начала операции, модуль 600 содействия операции парковки выполняет управление содействием вождению, чтобы предотвращать приближение транспортного средства 1 к препятствию X. Предотвращение сближения между препятствием X и транспортным средством 1 достигается посредством выполнения по меньшей мере одного из сигнализации водителю, приложения тормозной силы к транспортному средству 1, ограничения увеличения движущей силы транспортного средства 1 и приложения силы реакции к педали ускорения.
[0076]
В настоящем варианте осуществления управление содействием вождению ограничивается в то время как транспортное средство 1 движется задним ходом для парковки. А именно, как пояснено выше по тексту, устанавливается (βmin)≤β<1, в то время как транспортное средство 1 движется задним ходом для парковки, и тем самым вывод операционной команды посредством управления содействием вождению для сближения между препятствием X и транспортным средством 1 запрещается, когда β<1. В качестве альтернативы, управление содействием вождению запрещается через определения вышеописанных условий (i)-(iv) с использованием приростов βi (<1: i=1~4) для каждого из управлений (торможение, приложение силы реакции педали, сигнализация и ограничение движущей силы). Как результат, может предотвращаться странное ощущение, вызываемое посредством операций управления содействием вождению.
[0077]
А именно, в случае, если другое транспортное средство приближается, в то время как транспортное средство 1 движется в целевое положение парковки, другое транспортное средство, в общем, останавливается или уменьшает свою скорость. В этом случае, если расстояние начала управления является большим, водитель транспортного средства 1 ощущает, что начало управления является слишком ранним. Другими словами, если управление содействием вождению для предотвращения сближения между транспортным средством 1 и другим транспортным средством (препятствием X) начинается с большого расстояния между транспортным средством 1 и другим транспортным средством (препятствием X), водитель транспортного средства 1 имеет странное ощущение, что его начало управления является слишком ранним. В настоящем варианте осуществления, странное ощущение водителя может быть уменьшено посредством ограничения управления содействием вождению. Следует отметить, что даже в случае, если определено то, что парковка начата, выполняется обычное управление содействием вождению, если определяется то, что транспортное средство 1 не движется вследствие завершения парковки или остановки в течение предварительно определенного времени (т.е. P=1).
[0078]
Вышеуказанные операции аналогичным образом выполняются даже во время такой парковки, как параллельная парковка. А именно, управление содействием вождению ограничено при движении в целевое положение парковки, так что может предотвращаться странное ощущение вследствие управления содействием вождению. Следует отметить, что предпочтительно, чтобы вышеописанный первый прирост α2 в ходе выполнения (прирост для направления движения транспортного средства 1 в целевое положение парковки) не использовался в случае параллельной парковки.
[0079]
С другой стороны, не обнаруживается то, что оно не движется в целевое положение парковки, в случае если транспортное средство 1 выезжает из припаркованного положения посредством движения задним ходом, так что управление содействием вождению не ограничено, и выполняется требуемое управление содействием вождению (предотвращается сближение между препятствием X и транспортным средством 1). А именно, в случае, если транспортное средство 1 движется, но не движется в целевое положение парковки (например, выезд из припаркованного положения), водителю другого транспортного средства может быть затруднительно распознавать выезд транспортного средства 1 и затруднительно останавливать другое транспортное средство или уменьшать свою скорость. Если расстояние начала управления является небольшим в таком случае, водитель транспортного средства 1 имеет странное ощущение, что его начало управления является слишком запоздалым. В настоящем варианте осуществления при отсутствии движения в целевое положение парковки управление содействием вождения не ограничено, а выполняется надлежащим образом.
[0080]
Как пояснено выше по тексту, согласно настоящему варианту осуществления расстояние начала управления устанавливается меньшим при движении в целевое положение парковки [компенсация в виде умножения на βi (<1) Lsb, Lsa, Lsh и Lsf], чем при отсутствии движения в целевое положение парковки, так что управление содействием вождению может быть выполнено в подходящее время согласно состоянию транспортного средства 1 (во время движения парковки). Как результат, может предотвращаться возникновение странного ощущения у водителя.
Здесь в вышеприведенном описании, случай ограничения посредством запрещения управления и случай ограничения посредством задания расстояния начала управления (порогового значения определения операции) меньшим, чтобы предотвращать вмешательство посредством управления содействием вождению [компенсации умножением расстояния начала управления, т.е. на βi (<1) Lsb, Lsa, Lsh и Lsf], поясняются в качестве примеров для ограничения управления содействием вождению. А именно, величина управления содействием управления содействием вождению уменьшается посредством запрещения управления содействием вождению или посредством предотвращения вмешательства посредством управления содействием вождению. Вместо этого, величина управления содействием управления содействием вождению может быть уменьшена посредством принудительного понижения величины управления из управления содействием вождению. Например, величина управления может принудительно понижаться посредством умножения, на прирост β (<1), целевого тормозного давления посредством тормозного контроллера 620, величины силы реакции педали посредством контроллера 640 силы реакции педали, громкости звука посредством контроллера 660 сигнализации и/или величины ограничения движущей силы посредством контроллера 680 движущей силы. Помимо этого, управление содействием вождению может ограничиваться посредством использования предварительно определенной ограничительной величины компенсации вместо компенсации расстояния начала управления (порогового значения определения операции) или величины управления посредством использования прироста β или βi.
[0081]
Помимо этого, в вышеприведенном описании, приложение тормозной силы посредством генератора 15 тормозной силы, приложение силы реакции к педали ускорения посредством генератора 16 силы реакции педали, сигнализация водителю посредством сигнализации 17 и ограничение движущей силы посредством генератора 14 движущей силы поясняются в качестве примеров управления содействием вождению. Тем не менее управление содействием вождению может быть выполнено посредством одного или любой комбинации управлений.
Помимо этого, в вышеприведенном варианте осуществления управление содействием вождению, в то время как транспортное средство 1 движется задним ходом (во время управления для предотвращения сближения между препятствием X и транспортным средством 1), поясняется в качестве примера, но вышеуказанное управление содействием вождению может быть выполнено, в то время как транспортное средство 1 движется вперед.
[0082]
Преимущества настоящего варианта осуществления
(1) Когда расстояние от препятствия X до транспортного средства 1, обнаруженного посредством детекторов 13 препятствий, становится равным или меньше предварительно определенного расстояния начала управления, модуль 600 содействия операции парковки содействует вождению водителем транспортного средства 1 посредством выполнения управления содействием вождению для предотвращения сближения между препятствием X и транспортным средством 1. Модуль 561 определения начала парковки определяет начало парковки. Модуль 562 определения хода выполнения парковки определяет продвижение парковки между началом парковки, определенным посредством модуля 561 определения начала парковки, и завершением парковки. Модуль 560 вычисления хода выполнения парковки уменьшает величину управления содействием до модуля 600 содействия операции парковки согласно продвижению парковки, определенному посредством модуля 562 определения хода выполнения парковки.
[0083]
Когда другое транспортное средство приближается к транспортному средству 1, движущемуся в целевое положение парковки, водитель транспортного средства 1 стремится быстро заканчивать парковку. Помимо этого, когда другое транспортное средство приближается к транспортному средству 1, движущемуся в целевое положение парковки, другое транспортное средство, в общем, останавливается или уменьшает свою скорость. Следовательно, если управление содействием вождению для предотвращения сближения между препятствием X и транспортным средством 1 вмешивается, в то время как транспортное средство 1 движется в целевое положение парковки, водитель транспортного средства 1 может иметь странное ощущение. Таким образом, согласно настоящему варианту осуществления управление содействием вождению может быть выполнено надлежащим образом. Как результат, может быть возможным уменьшать странное ощущение водителя.
[0084]
(2) Когда расстояние от препятствия X до транспортного средства 1, обнаруженного посредством модуля 203 вычисления относительного расстояния, становится равным или меньше предварительно определенного расстояния начала управления, модуль 600 содействия операции парковки содействует вождению водителем транспортного средства 1 посредством выполнения управления содействием вождению для предотвращения сближения между препятствием X и транспортным средством 1. Модуль 561 определения начала парковки определяет то, движется или нет транспортное средство 1 в целевое положение парковки. Когда модуль 561 определения начала парковки определяет то, что транспортное средство 1 движется в целевое положение парковки, модуль 560 вычисления хода выполнения парковки ограничивает управление содействием вождению посредством модуля 600 содействия операции парковки.
[0085]
Когда другое транспортное средство приближается к транспортному средству 1, движущемуся в целевое положение парковки, водитель транспортного средства 1 стремится быстро заканчивать парковку. Помимо этого, когда другое транспортное средство приближается к транспортному средству 1, движущемуся в целевое положение парковки, другое транспортное средство, в общем, останавливается или уменьшает свою скорость. Следовательно, управление содействием вождению может быть выполнено надлежащим образом посредством ограничения управления содействием вождению, в то время как транспортное средство 1 движется в целевое положение парковки, чтобы предотвращать вмешательство посредством управления содействием вождению в операциях парковки. Как результат, управление содействием вождению может быть выполнено надлежащим образом согласно случаю транспортного средства 1, и тем самым можно не допускать возникновение странного ощущения у водителя.
[0086]
(3) Модуль 562 определения хода выполнения парковки определяет степень(и) выполнения парковки от начала движения транспортного средства 1 в целевое положение парковки до завершения парковки. Модуль 560 вычисления хода выполнения парковки дополнительно увеличивает ограничение управления содействием вождению посредством модуля 600 содействия операции парковки по мере того, как определенная степень(и) выполнения парковки приближается к завершению парковки.
Когда другое транспортное средство приближается к транспортному средству 1, движущемуся в целевое положение парковки, водитель транспортного средства 1 стремится быстрее заканчивать парковку по мере того, как ход выполнения парковки продвигается (приближается к завершению парковки). Следовательно, управление содействием вождению может быть выполнено надлежащим образом посредством ограничения управления содействием вождению более по мере того, как ход выполнения парковки продвигается (приближается к завершению парковки), чтобы предотвращать вмешательство посредством управления содействием вождению в операциях парковки. Как результат, управление содействием вождению может быть выполнено надлежащим образом согласно случаю транспортного средства 1, и тем самым можно не допускать возникновение странного ощущения у водителя.
[0087]
(4) Модуль 562 определения хода выполнения парковки определяет степень выполнения парковки на основе пройденного расстояния транспортного средства 1 от положения начала парковки до целевого положения парковки. Следовательно, стадия выполнения парковки может быть определена от начала движения транспортного средства в целевое положение парковки до завершения парковки на основе пройденного расстояния.
(5) Модуль 562 определения хода выполнения парковки определяет степень выполнения парковки на основе ориентации транспортного средства 1 относительно целевого положения парковки. Следовательно, стадия хода выполнения парковки может быть определена от начала движения транспортного средства 1 в целевое положение парковки до завершения парковки на основе ориентации транспортного средства 1. Следует отметить, что можно предположить, что она приближается к завершению парковки по мере того, как текущая ориентация транспортного средства 1 приближается к ориентации транспортного средства в целевом положении парковки.
(6) Модуль 562 определения хода выполнения парковки определяет степень выполнения парковки на основе накопленной величины варьирования угла руления от начала движения транспортного средства 1 в целевое положение парковки. Следовательно, степень выполнения парковки может быть определена от начала движения транспортного средства 1 до завершения парковки на основе накопленной величины варьирования угла руления.
(7) Модуль 562 определения хода выполнения парковки определяет степень выполнения парковки на основе истекшего времени от начала движения транспортного средства 1 в целевое положение парковки. Следовательно, степень выполнения парковки может быть определена от начала движения транспортного средства 1 до завершения парковки на основе истекшего времени.
[0088]
(8) Ограничение управления содействием вождению посредством модуля 600 содействия операции парковки представляет собой по меньшей мере одно из запрещения управления содействием вождению, сокращения расстояния начала управления и уменьшения величины управления для управления содействием вождению. Согласно этому, может ограничиваться управление содействием вождению для предотвращения сближения между транспортным средством 1 и препятствием X.
[0089]
(9) Управление содействием вождению посредством модуля 600 содействия операции парковки для предотвращения сближения между транспортным средством 1 и препятствием X представляет собой по меньшей мере одно из сигнализации водителю, приложения тормозной силы к транспортному средству 1, ограничения увеличения движущей силы транспортного средства 1 и приложения силы реакции к педали ускорения. Согласно этому может предотвращаться сближение между транспортным средством 1 и препятствием X.
[0090]
Весь контент заявки на патент (Япония) № 2010-144804 (поданной 25 июня 2010 года) и заявки на патент (Япония) № 2011-33011 (поданной 18 июня 2011 года) содержится в данном описании по ссылке. Хотя изобретение описано выше по тексту в отношении некоторого варианта осуществления изобретения, оно не ограничено вариантом осуществления, описанным выше по тексту. Объем настоящего изобретения определяется в контексте формулы изобретения.
Реферат
Изобретение относится к системам помощи при парковке автомобиля. Устройство управления содействием парковке содержит детектор препятствий; модуль содействия парковке; модуль определения начала парковки и модуль уменьшения величины управления содействием. При этом содействие парковке представляет собой приложение тормозной силы к транспортному средству и ограничения движущей силы транспортного средства. В других вариантах устройства уменьшение операционной величины управления содействием осуществляется посредством сокращения расстояния начала парковки, а также посредством понижения операционной величины управления содействием. В еще одном варианте устройство управления содействием парковке содержит средство обнаружения препятствий; средство содействия парковке; средство определения парковки и средство уменьшения величины управления содействием. В способе управления содействием парковке обнаруживают препятствие позади транспортного средства; определяют расстояние между препятствием и транспортным средством; исполняют содействие парковке для предотвращения сближения между препятствием и транспортным средством; определяют начало операции парковки и уменьшают операционную величину управления содействием. Достигается более надежное управление содействием. 6 н. и 9 з.п. ф-лы, 19 ил.
Формула
- детектор препятствий, который предоставляется в задней части транспортного средства, чтобы обнаруживать препятствие позади транспортного средства;
- модуль содействия парковке, который исполняет, когда определяется то, что расстояние между препятствием, обнаруженным посредством детектора препятствий, и транспортным средством становится равным или меньше предварительно определенного расстояния начала управления, содействие парковке для предотвращения сближения между препятствием и транспортным средством на основе операционной величины управления содействием во время движения задним ходом транспортного средства из припаркованного положения и движения задним ходом транспортного средства для парковки;
- модуль определения начала парковки, который определяет начало операции парковки, при которой движение задним ходом выполняется после предварительно определенного движения передним ходом; и
- модуль уменьшения величины управления содействием, который уменьшает, когда определяется начало операции парковки посредством модуля определения начала парковки, операционную величину управления содействием посредством модуля содействия парковке во время движения задним ходом транспортного средства для парковки до значения меньше операционной величины управления содействием посредством модуля содействия парковке при движении задним ходом транспортного средства из припаркованного положения, при этом:
- содействие парковке посредством модуля содействия парковке представляет собой по меньшей мере одно управление из приложения тормозной силы к транспортному средству и ограничения движущей силы транспортного средства.
- модуль определения начала парковки определяет начало операции парковки, когда диапазон переключения транспортного средства устанавливается равным диапазону движения задним ходом после движения на предварительно определенное расстояние или в течение предварительно определенного времени с диапазоном переключения, установленным в диапазон движения передним ходом.
- ограничение движущей силы включает в себя приложение силы реакции к педали ускорения.
- модуль определения хода выполнения парковки, который определяет степень выполнения парковки во время операции парковки, определенной посредством модуля определения начала парковки; и
- модуль вычисления хода выполнения парковки, который уменьшает операционную величину управления содействием посредством модуля содействия парковке согласно степени выполнения парковки, определенной посредством модуля определения хода выполнения парковки.
- модуль вычисления хода выполнения парковки уменьшает операционную величину управления содействием посредством модуля содействия парковке больше по мере того, как степень выполнения парковки, определенная посредством модуля определения хода выполнения парковки, приближается к завершению парковки.
- модуль определения хода выполнения парковки определяет степень выполнения парковки на основе расстояния между транспортным средством и целевым положением парковки во время начала парковки и пройденного расстояния транспортного средства после начала парковки.
- модуль определения хода выполнения парковки определяет степень выполнения парковки на основе ориентации транспортного средства относительно целевого положения парковки.
- модуль определения хода выполнения парковки определяет степень выполнения парковки на основе накопленной величины варьирования угла руления от начала парковки.
- модуль определения хода выполнения парковки определяет степень выполнения парковки на основе истекшего времени после начала парковки.
- детектор препятствий, который предоставляется в задней части транспортного средства, чтобы обнаруживать препятствие позади транспортного средства;
- модуль содействия парковке, который исполняет, когда определяется то, что расстояние между препятствием, обнаруженным посредством детектора препятствий, и транспортным средством становится равным или меньше предварительно определенного расстояния начала управления, содействие парковке для предотвращения сближения между препятствием и транспортным средством на основе операционной величины управления содействием во время движения задним ходом транспортного средства из припаркованного положения и движения задним ходом транспортного средства для парковки;
- модуль определения начала парковки, который определяет начало операции парковки, при которой движение задним ходом выполняется после предварительно определенного движения передним ходом; и
- модуль уменьшения величины управления содействием, который уменьшает, когда определяется начало операции парковки посредством модуля определения начала парковки, операционную величину управления содействием посредством модуля содействия парковке во время движения задним ходом транспортного средства для парковки до значения меньше операционной величины управления содействием посредством модуля содействия парковке при движении задним ходом транспортного средства из припаркованного положения, при этом:
- содействие парковке посредством модуля содействия парковке представляет собой по меньшей мере одно управление из приложения тормозной силы к транспортному средству и ограничения движущей силы транспортного средства, и
- уменьшение операционной величины управления содействием посредством модуля уменьшения величины управления содействием осуществляется посредством сокращения расстояния начала парковки.
- ограничение движущей силы включает в себя приложение силы реакции к педали ускорения.
- средство обнаружения препятствий, предоставляемое в задней части транспортного средства для обнаружения препятствия позади транспортного средства;
- средство содействия парковке для исполнения, при определении того, что расстояние между препятствием, обнаруженным посредством средства обнаружения препятствий, и транспортным средством становится равным или меньше предварительно определенного расстояния начала управления, содействия парковке для предотвращения сближения между препятствием и транспортным средством на основе операционной величины управления содействием во время движения задним ходом транспортного средства из припаркованного положения и движения задним ходом транспортного средства для парковки;
- средство определения парковки для определения начала операции парковки, при которой движение задним ходом выполняется после предварительно определенного движения передним ходом; и
- средство уменьшения величины управления содействием для уменьшения, когда определяется начало операции парковки, операционной величины управления содействием посредством средства содействия парковке во время движения задним ходом транспортного средства для парковки до значения меньше операционной величины управления содействием посредством средства содействия парковке при движении задним ходом транспортного средства из припаркованного положения, при этом:
- содействие парковке посредством средства содействия парковке представляет собой по меньшей мере одно управление из приложения тормозной силы к транспортному средству и ограничения движущей силы транспортного средства.
- обнаруживают препятствие позади транспортного средства;
- определяют то, становится или нет расстояние между препятствием и транспортным средством равным или меньше предварительно определенного расстояния начала управления во время движения задним ходом транспортного средства из припаркованного положения и движения задним ходом транспортного средства для парковки;
- исполняют содействие парковке для предотвращения сближения между препятствием и транспортным средством на основе операционной величины управления содействием, когда определено, что расстояние между препятствием и транспортным средством становится равным или меньше предварительно определенного расстояния начала управления;
- определяют начало операции парковки, при которой движение задним ходом выполняется после предварительно определенного движения передним ходом; и
- уменьшают, когда определяется начало операции парковки, операционную величину управления содействием для содействия парковке во время движения задним ходом транспортного средства для парковки до значения меньше операционной величины управления содействием при движении задним ходом транспортного средства из припаркованного положения, при этом:
- содействие парковке представляет собой по меньшей мере одно управление из приложения тормозной силы к транспортному средству и ограничения движущей силы транспортного средства.
- детектор препятствий, который предоставляется в задней части транспортного средства, чтобы обнаруживать препятствие позади транспортного средства;
- модуль содействия парковке, который исполняет, когда определяется то, что расстояние между препятствием, обнаруженным посредством детектора препятствий, и транспортным средством становится равным или меньше предварительно определенного расстояния начала управления, содействие парковке для предотвращения сближения между препятствием и транспортным средством на основе операционной величины управления содействием во время движения задним ходом транспортного средства из припаркованного положения и движения задним ходом транспортного средства для парковки;
- модуль определения начала парковки, который определяет операцию парковки, при которой транспортное средство движется задним ходом в целевое положение парковки; и
- модуль уменьшения величины управления содействием, который уменьшает, когда модуль определения начала парковки определяет операцию парковки, операционную величину управления содействием посредством модуля содействия парковке во время движения задним ходом транспортного средства для парковки до значения меньше операционной величины управления содействием посредством модуля содействия парковке при движении задним ходом транспортного средства из припаркованного положения, при этом:
- содействие парковке посредством модуля содействия парковке представляет собой по меньшей мере одно управление из приложения тормозной силы к транспортному средству и ограничения движущей силы транспортного средства.
- детектор препятствий, который предоставляется в задней части транспортного средства, чтобы обнаруживать препятствие позади транспортного средства;
- модуль содействия парковке, который исполняет, когда определяется то, что расстояние между препятствием, обнаруженным посредством детектора препятствий, и транспортным средством становится равным или меньше предварительно определенного расстояния начала управления, содействие парковке для предотвращения сближения между препятствием и транспортным средством на основе операционной величины управления содействием во время движения задним ходом транспортного средства из припаркованного положения и движения задним ходом транспортного средства для парковки;
- модуль определения начала парковки, который определяет начало операции парковки, при которой движение задним ходом выполняется после предварительно определенного движения передним ходом; и
- модуль уменьшения величины управления содействием, который уменьшает, когда определяется начало операции парковки посредством модуля определения начала парковки, операционную величину управления содействием посредством модуля содействия парковке во время движения задним ходом транспортного средства для парковки до значения меньше операционной величины управления содействием посредством модуля содействия парковке при движении задним ходом транспортного средства из припаркованного положения, при этом:
- содействие парковке посредством модуля содействия парковке представляет собой по меньшей мере одно управление из приложения тормозной силы к транспортному средству и ограничения движущей силы транспортного средства, и
- уменьшение операционной величины управления содействием посредством модуля уменьшения величины управления содействием осуществляется посредством понижения операционной величины управления содействием.
Комментарии