Устройство контроля вождения - RU2520855C2
Код документа: RU2520855C2
Чертежи







Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройству контроля вождения для избежания контакта с боковым объектом, когда транспортное средство перемещается в сторону для перестроения или совершает подобное действие.
УРОВЕНЬ ТЕХНИКИ
Известно устройство, которое обнаруживает присутствие или отсутствие и направление рулевого управления, а также препятствие, присутствующее сбоку и немного позади кузова транспортного средства, и сдерживает рулевое управление, когда оно определяет, что рулевое управление вероятно может вызвать контакт с препятствием (см. Патентный документ 1).
ПАТЕНТНЫЙ ДОКУМЕНТ
Патентный документ 1: Публикация заявки на выдачу патента Японии № H8(1996)-253160
ТЕХНИЧЕСКАЯ ЗАДАЧА
В этой связи предполагается, что в отсутствие других транспортных средств, приближающихся сзади, транспортное средство начинает перестроение, чтобы войти в соседнюю полосу движения, а после того как транспортное средство начало вхождение в соседнюю полосу движения, другое транспортное средство является приближающимся сзади в целевой полосе движения. В этом случае может быть надлежащим, чтобы транспортное средство предпочтительнее быстро завершило перестроение, чем прекращало перестроение, чтобы уступить дорогу другому транспортному средству, приближающемуся сзади. Другими словами, право преимущественного проезда меняется согласно обстоятельствам по случаю, так что водитель, вероятно, может чувствовать себя некомфортно, если перестроение неизменно сдерживается всякий раз, когда обнаруживается приближение другого транспортного средства сзади.
Задачей настоящего изобретения является предотвращение ненадлежащего вмешательства в управление для сдерживания перемещения транспортного средства в сторону во время смены полосы движения.
РЕШЕНИЕ ЗАДАЧИ
Устройство контроля вождения согласно настоящему изобретению приводит в действие управление для сдерживания перемещения транспортного средства в сторону по направлению к боковому объекту, когда обнаружен боковой объект, присутствующий сбоку транспортного средства, а также позади транспортного средства. Кроме того, приведение в действие управления подавляется, даже если обнаружен боковой объект, когда в отсутствие обнаружения бокового объекта транспортное средство начинает вхождение в соседнюю полосу движения для того, чтобы перестроиться.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - принципиальная структурная схема общего вида конфигурации транспортного средства.
Фиг.2 - блок-схема последовательности операций способа процесса управления предупреждением о перестроении.
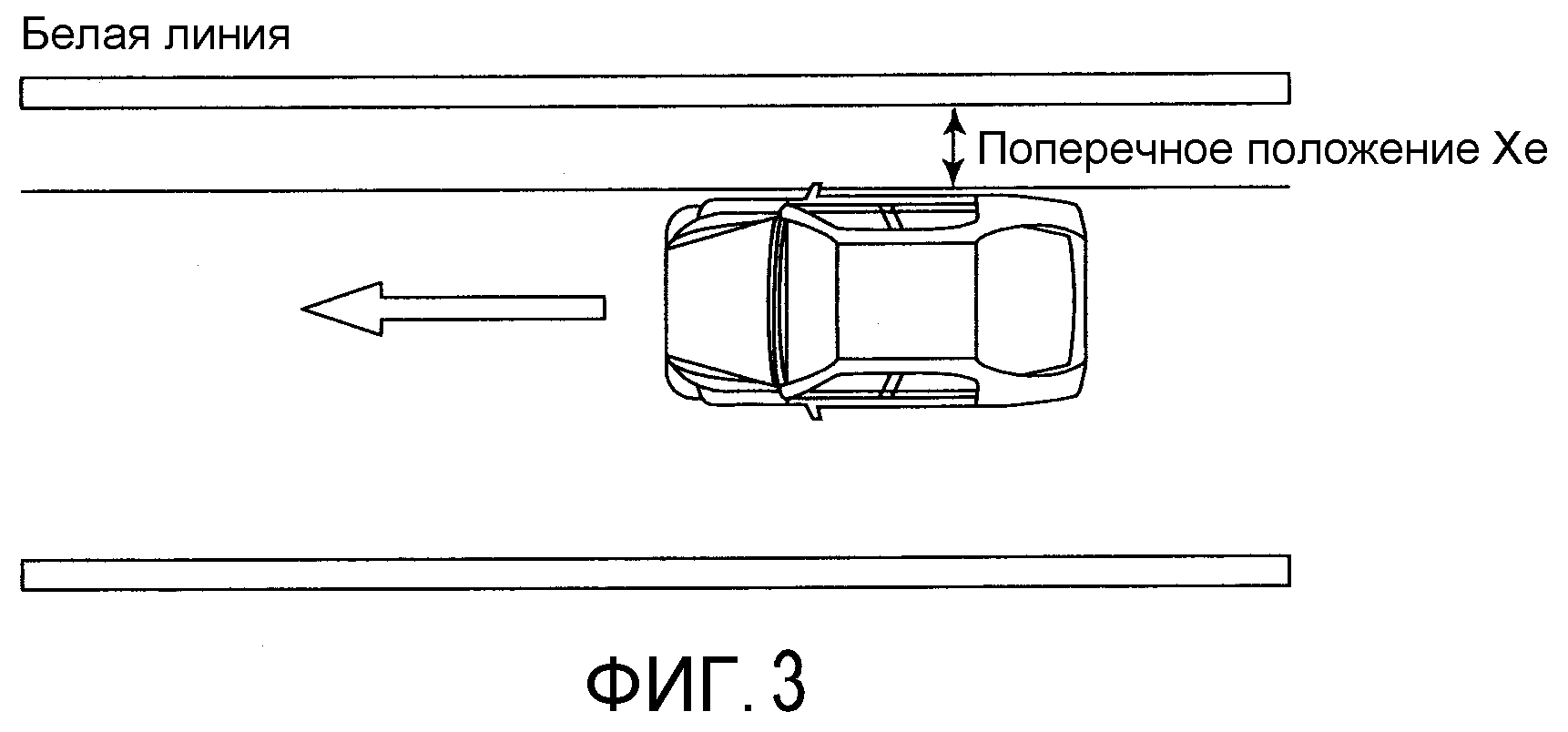
Фиг.3 - вид, показывающий текущее поперечное положение транспортного средства относительно линии разметки полос движения.
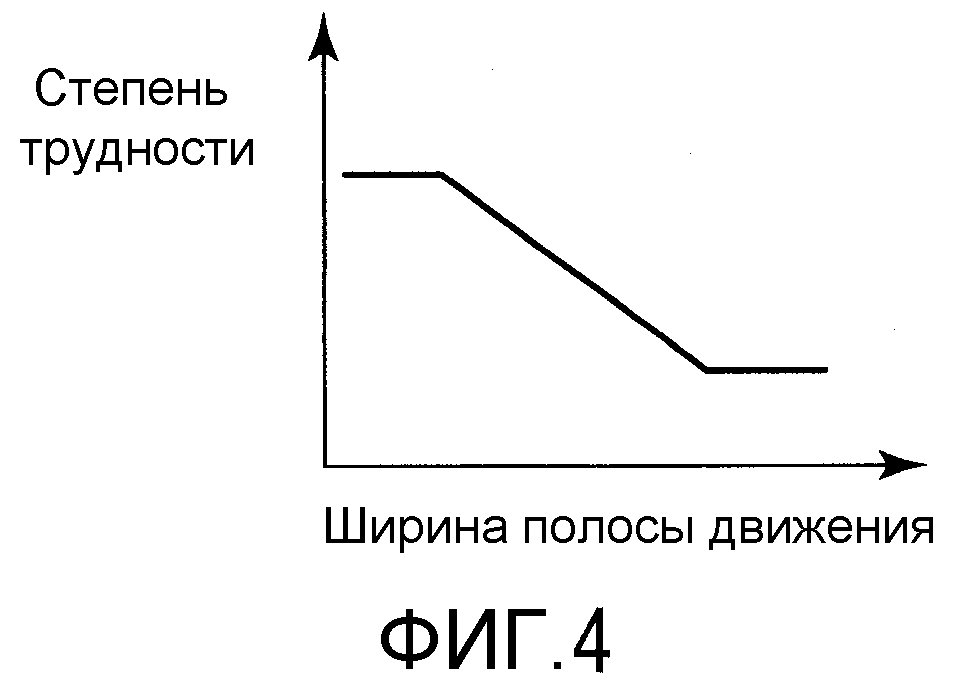
Фиг.4 - карта, используемая для расчета степени трудности согласно ширине соседней полосы движения.
Фиг.5 - карта, используемая для расчета степени трудности согласно кривизне проезжей части.
Фиг.6 - карта, используемая для расчета степени трудности согласно ширине транспортного средства у бокового транспортного средства.
Фиг.7 - карта, используемая для расчета значения Xth настройки.
Фиг.8 - карта, используемая для расчета значения Tth настройки.
Фиг.9 - вид, показывающий пример обстановки вождения.
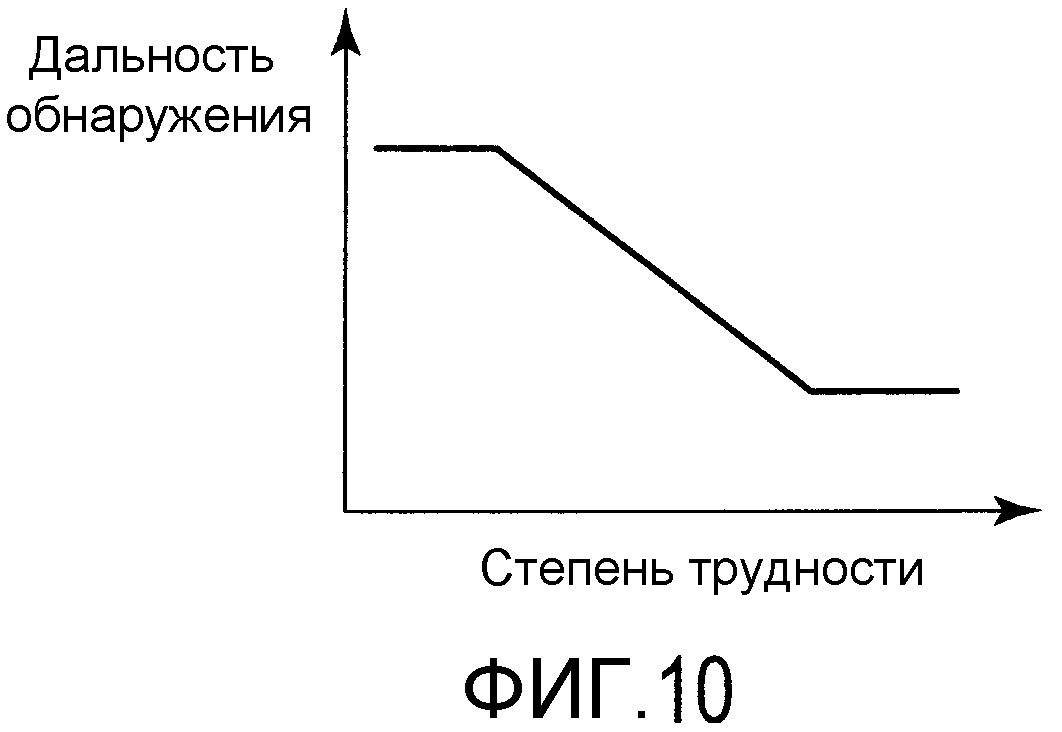
Фиг.10 - карта, используемая для установки зоны обнаружения, и
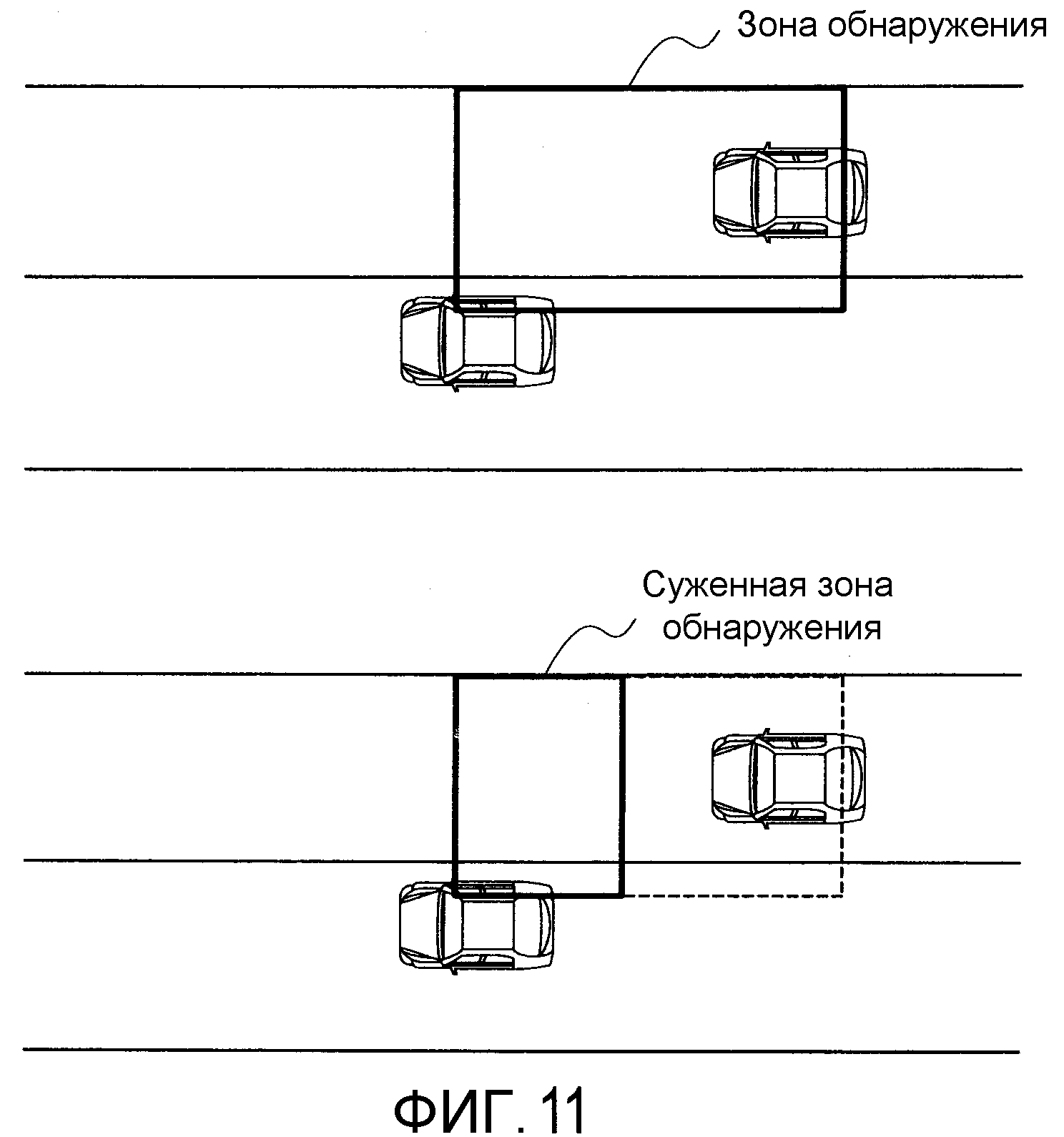
фиг.11 - вид, показывающий, каким образом следует сужать зону обнаружения.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Варианты осуществления настоящего изобретения будут описаны далее со ссылкой на чертежи.
Первый вариант осуществления
Конфигурация
Фиг.1 показывает общий вид конфигурации настоящего изобретения. Привод 3 тормозов для использования в противоскользящем управлении (ABS: антиблокировочной тормозной системе), регулировании тягового усилия (TCS: системе регулирования тяги), управлении устойчивостью (VDC: регулировании динамики транспортного средства) и тому подобном, вставлен между главным цилиндром 1 и колесными цилиндрами 2i (где i=FL, FR, RL, RR). Привод 3 тормозов включает в себя гидравлические устройства, такие как электромагнитный клапан и насос, и эти устройства с приведением в движение управляются контроллером 4, чтобы, тем самым, предоставлять возможность отдельного управления гидравлическими давлениями колесных цилиндров 2i независимо от операции торможения водителя.
Кроме того, предусмотрена камера 5, которая снимает изображение вида по направлению вперед от транспортного средства, и устройство обработки изображений (не показано) обнаруживает полосу проезжей части, распознавая линию разметки полос движения, такую как белая линия (то есть то, что называется разметкой полос движения, в дальнейшем указываемая ссылкой как белая линия), на основании данных снятого изображения и, кроме того, рассчитывает угол φ рыскания транспортного средства относительно полосы проезжей части, поперечное смещение X относительно полосы проезжей части и кривизну p полосы проезжей части, и вводит различные сигналы в контроллер 4. Когда поверхность дороги не имеет белой линии, полоса проезжей части может оцениваться на основании кромки дороги, ограждения, бордюра и тому подобного. В этой связи в варианте осуществления поперечное направление указывает ссылкой на направление ширины полосы движения, а продольное направление указывает ссылкой на направление продолжения полосы движения. Кроме того, поперечное смещение X указывает ссылкой на расстояние в поперечном направлении от центра полосы проезжей части до центра транспортного средства в его направлении ширины транспортного средства, а угол φ рыскания указывает ссылкой на угол, образованный продолжением направления полосы движения и направлением транспортного средства спереди назад.
В этой связи расчет угла φ рыскания, например, может быть выполнен преобразованием данных изображения, снятых камерой 5, в изображение вида с высоты птичьего полета и выявлением угла белой линии (или разметки полосы движения) относительно направления сверху вниз преобразованного изображения (или направления транспортного средства спереди назад). К тому же угол φ рыскания может быть рассчитан, как приведено ниже:
φ=tan-1(dX/dY)=tan-1(dX'/V)
где dX обозначает величину изменения поперечного смещения X за предопределенное время, dY - величину изменения расстояния, которое транспортное средство проезжает посредством своего перемещения вперед (то есть положения транспортного средства в продольном направлении), dX' - значение, полученное дифференцированием dX по времени, а V - скорость транспортного средства, которая будет описана позже.
Кроме того, расчет кривизны p может быть получен из блока 14 навигации, который будет описан позже. Способы для расчета поперечного смещения X транспортного средства, кривизны p полосы проезжей части, угла φ рыскания и тому подобного на основании данных изображения на виде по направлению вперед от транспортного средства, снятых камерой 5, не будут описываться подробно вследствие являющихся известными технологий, применяемых раньше в различных устройствах, например, таких, как устройство контроля вождения с сохранением полосы движения, которые управляют транспортным средством, распознавая белую линию.
Между тем, радарные устройства 6L, 6R, например, использующие миллиметровые волны, предусмотрены на левой и правой сторонах, соответственно, транспортного средства, чтобы, тем самым, обнаруживать боковые объекты, присутствующие по бокам транспортного средства (и немного позади транспортного средства), которые склонны находиться на закрытом от водителя участке обзора. Радарные устройства 6L, 6R выявляют, присутствуют или нет объекты (в дальнейшем указываемые ссылкой как боковые объекты) в предопределенных зонах по бокам от транспортного средства, а также позади транспортного средства (иногда указываемое ссылкой как «сзади по бокам от транспортного средства»), то есть присутствуют или отсутствуют боковые объекты, и также выявляют относительное расстояние до транспортного средства в поперечном направлении, относительное расстояние в направлении спереди назад, относительную скорость и тому подобное. В этой связи радарные устройства 6L, 6R не ограничены радарами миллиметровых волн, использующих миллиметровые волны, но, например, могут быть лазерными радарами или могут быть устройствами, которые выявляют присутствие или отсутствие боковых объектов или взаимное расположение боковых объектов и транспортного средства относительно друг друга, на основании изображений, снятых камерой, которая снимает изображения видов назад по бокам транспортного средства. Другими словами, любое устройство не будет действовать за радарные устройства 6L, 6R всего лишь при условии, что они могут выявлять присутствие или отсутствие боковых объектов или взаимное расположение относительно транспортного средства, и, таким образом, радарные устройства 6L, 6R могут быть изменены при необходимости.
Кроме того, давление Pm главного цилиндра, выявленное датчиком 10 давления, угол δ поворота, выявленный датчиком 11 угла поворота, скорости Vwj вращения колес, выявленные датчиком 12 скорости вращения колеса, и состояние работы переключателя 13 указателя поворота вводятся в контроллер 4. Дополнительно ускорение Yg спереди назад и поперечное ускорение Xg транспортного средства, выявленное акселерометром (не показан), скорость рыскания, выявленная датчиком скорости рыскания (не показан), и информация о дороге или тому подобное, полученное из блока 14 навигации, вводятся в контроллер 4. В этой связи датчик 12 скорости вращения колеса детектирует скорость VwFL вращения колеса у переднего левого колеса, скорость VwFR вращения колеса у переднего правого колеса, скорость VwRL вращения колеса у заднего левого колеса и скорость VwRR вращения колеса у заднего правого колеса транспортного средства, и эти скорости вращения колес в общем называются скоростями Vwi вращения колес.
Когда вышеописанные различные данные имеют характеристики левой или правой направленности, любые данные берутся в качестве положительного значения для направления влево или в качестве отрицательного значения для направления вправо. Более точно, угол φ рыскания и угол δ поворота берутся в качестве положительных значений во время левого поворота или в качестве отрицательных значений во время правого поворота, а поперечное смещение X берется в качестве положительного значения, когда транспортное средство смещается влево относительно центра полосы проезжей части, или в качестве отрицательного значения, когда транспортное средство смещается вправо.
Кроме того, предупреждающее устройство 20 предусмотрено для озвучивания предупреждения или засветки предупредительной сигнальной лампы в ответ на предупредительный сигнал, выдаваемый контроллером 4.
Контроллер 4 выполняет последовательность операций управления предупреждением о перестроении, которая будет описана позже.
Затем будет дано описание касательно последовательности операций управления предупреждением о перестроении, которую контроллер 4 выполняет в качестве прерывания по таймеру с предопределенными промежутками времени (например, с интервалами 10 мс), следуя блок-схеме последовательности операций способа по фиг.2.
Сначала на этапе S1 считываются различные данные.
Затем на этапе S2 средняя скорость вращения колеса у не приводимых в движение колес (или неприводных колес) рассчитывается, чтобы определять скорость V транспортного средства, как приведено ниже. В этой связи, когда V может быть получена из информации о противоскользящем управлении или навигационной информации, полученное значение может использоваться.
В случае привода на передние колеса V задано уравнением: V=(VWRL+VWRR)/2.
В случае привода на задние колеса V задано уравнением: V=(VWFL+VWFR)/2.
Затем на этапе S3 присутствие или отсутствие бокового объекта определяется на основании результатов, обнаруженных радарными устройствами 6L, 6R. Здесь, когда боковой объект отсутствует, флажковый признак Fd обнаружения сбрасывается в «0». Между тем, когда боковой объект присутствует, флажковый признак Fd обнаружения устанавливается в «1».
Затем на этапе S4 нейтральная скорость Ψp рыскания в качестве скорости рыскания, требуемой, чтобы транспортное средство сохраняло движение вдоль маршрута вождения, рассчитывается согласно кривизне p и скорости V транспортного средства, как приведено ниже. Нейтральная скорость Ψp рыскания является нулевой во время вождения по прямой дороге. Однако в случае извилистой дороги нейтральная скорость Ψp рыскания меняется согласно кривизне p полосы проезжей части. Поэтому кривизна p полосы проезжей части используется для расчета нейтральной скорости Ψp рыскания.
Ψp=ρ×V
Затем на этапе S5 любой один из следующих способов 1 и 2 используется для расчета расстояния в поперечном направлении между текущим поперечным положением транспортного средства (или положения транспортного средства в поперечном направлении) и поперечным положением транспортного средства после истечения предопределенного отслеживаемого наперед времени Tt (например, около 1 с) (то есть разности между текущим поперечным смещением и поперечным смещением после истечения отслеживаемого наперед времени Tt). Здесь расстояние в поперечном направлении между текущим поперечным положением транспортного средства и поперечным положением транспортного средства после истечения предопределенного отслеживаемого наперед времени Tt является значением, указывающим поперечное положение транспортного средства после истечения предопределенного отслеживаемого наперед времени Tt относительно текущего поперечного положения транспортного средства. Таким образом, расстояние в поперечном направлении между текущим поперечным положением транспортного средства и поперечным положением транспортного средства после истечения предопределенного отслеживаемого наперед времени Tt будет называться «будущим поперечным положением Xf», и положение, которое является «будущим поперечным положением Xf» в стороне от текущего поперечного положения транспортного средства, то есть положением (или абсолютным положением) транспортного средства в поперечном направлении после истечения отслеживаемого наперед времени Tt, также будет называться «будущим поперечным положением».
1. Расчет выполняется согласно углу φ рыскания, целевой скорости Ψm рыскания и целевому ускорению Ψm' по углу рыскания.
Здесь веса назначаются углу рыскания φ, целевой скорости Ψm и целевому ускорению Ψm' по углу рыскания, и их взвешенные значения складываются вместе, как приведено ниже:
Xf=K1×φ+K2×Ψm+К3×Ψm'
где с K1 по К3 каждый обозначает коэффициент усиления, K1 - значение, полученное умножением отслеживаемого наперед времени Tt на скорость V транспортного средства, K2 - значение, полученное умножением предопределенного значения на скорость V транспортного средства, а К3 - значение, полученное умножением предопределенного значения на скорость V транспортного средства.
Целевая скорость Ψm рыскания и целевое ускорение Ψm' по углу рыскания рассчитываются, как изложено ниже:
Ψd=Kv×δ×V
Ψm=Ψh×Tt
Ψm'=Ψm×Tt2
где Ψd обозначает опорную скорость рыскания в качестве скорости рыскания, которая должна формироваться операцией рулевого управления водителя, определенный согласно углу δ поворота и скорости V транспортного средства, Ψh обозначает значение, полученное вычитанием нейтральной скорости Ψр рыскания из опорной скорости Ψd рыскания (то есть Ψh=Ψd-Ψр), или эквивалентно Ψh может благополучно упоминаться являющейся скоростью рыскания, зависящей от намерения водителя перестроиться, а Kv обозначает коэффициент усиления, заранее установленный согласно техническим условиям транспортного средства или тому подобному.
2. Расчет выполняется согласно целевой скорости Ψm рыскания и целевому ускорению Ψm' по углу рыскания.
Здесь веса назначаются целевой скорости Ψm рыскания и целевому ускорению Ψm' по углу рыскания, и их взвешенные значения подвергаются выбору высокого, как приведено ниже.
Xf=max(K2×Ψm, К3×Ψm')
Затем на этапе S6 текущее поперечное положение Xe транспортного средства относительно белой линии рассчитывается на основании данных изображения на виде по направлению вперед от транспортного средства, снятого камерой 5. Текущее поперечное положение Xe является расстоянием в поперечном направлении от белой линии до стороны транспортного средства, близкой к белой линии (см. фиг.3). В этой связи текущее поперечное положение Xe берется в качестве положительного значения, когда транспортное средство не пересекает белую линию, но остается в своей полосе движения, наряду с тем, что текущее поперечное положение Xe берется в качестве отрицательного значения, когда транспортное средство пересекает белую линию. К тому же текущее поперечное положение Xe может рассчитываться посредством известного подхода, например, такого как посредством преобразования данных изображения, снятых камерой 5, в изображение вида с высоты птичьего полета, и выполнения расчета на основании положения белой линии на изображении вида с высоты птичьего полета, как происходит в случае с поперечным смещением X, или тому подобным.
Затем на этапе S7 производится определение в отношении того, сбрасывается или нет флажковый признак Fd обнаружения в «0» (Fd=0). Когда определенный результат состоит в том, что Fd=0, выполняется определение, что боковой объект отсутствует, и обработка переходит на этап S8. Между тем, когда определенный результат состоит в том, что флажковый признак Fd обнаружения устанавливается в «1» (Fd=1), выполняется определение, что боковой объект присутствует, и обработка переходит на этап S17, который будет описан позже.
На этапе S8 оценивается степень трудности прохождения транспортного средства для бокового транспортного средства, приближающегося к транспортному средству сзади в целевой полосе движения (или трудность прохождения транспортного средства), когда транспортное средство начинает вхождение в соседнюю полосу движения для того, чтобы перестроиться.
Более точно, например, любой из последующих способов с 1 по 5 используется для оценки степени трудности прохождения.
1. Оценка выполняется на основании ширины полосы движения у целевой полосы движения.
В то время как ширина соседней полосы движения в качестве целевой полосы движения является более узкой, может ожидаться, что прохождение транспортного средства должно быть более трудным для бокового транспортного средства, приближающегося к транспортному средству сзади, когда транспортное средство начинает вхождение в соседнюю полосу движения. Поэтому, как показано на фиг.4, степень трудности прохождения оценивается более высокой, в то время как ширина соседней полосы движения является более узкой. Ширина полосы движения у соседней полосы движения получается из блока 14 навигации или получается из инфраструктуры.
2. Оценка выполняется на основании кривизны дороги.
В то время как кривизна p дороги является большей, то есть кривая является более компактной, может ожидаться, что прохождение транспортного средства должно быть более трудным для бокового транспортного средства, приближающегося к транспортному средству сзади, когда транспортное средство начинает вхождение в соседнюю полосу движения. Поэтому, как показано на фиг.5, степень трудности прохождения оценивается более высокой, в то время как кривизна дороги является большей.
3. Оценка выполняется на основании типа полосы проезжей части целевой полосы движения.
Одним из типов полосы проезжей части является полоса движения, названная полосой движения для машин, в которых едут два и более человека, включая водителя. Полоса движения для машин, в которых едут два и более человека, включая водителя, является быстрой полосой движения, в которой приоритет проезда отдан совместно используемому транспортному средству, в котором едут вместе заданное количество людей или более, и иногда называется полосой движения HOV (полосой движения транспортных средств с высокой заполненностью) в США. Обычно полоса движения для машин, в которых едут два и более человека, включая водителя, имеет тенденцию быть узкой по своей ширине полосы движения, быть в непосредственной близости к бетонной стене или быть в плохо мощеном состоянии. Таким образом, когда соседняя полоса движения в качестве целевой полосы движения является полосой движения для машин, в которых едут два и более человека, включая водителя, может ожидаться, что прохождение транспортного средства должно быть более трудным для бокового транспортного средства, приближающегося к транспортному средству сзади, когда транспортное средство начинает вхождение в соседнюю полосу движения, чем когда соседняя полоса движения, которая не является полосой движения для машин, в которых едут два и более человека, включая водителя. Поэтому когда соседняя полоса движения является полосой движения для машин, в которых едут два и более человека, включая водителя, степень трудности прохождения оценивается более высокой. Тип полосы проезжей части получается из блока 14 навигации или получается из инфраструктуры.
4. Оценка выполняется на основании ширины транспортного средства у бокового транспортного средства.
В то время как ширина транспортного средства у бокового транспортного средства является большей, может ожидаться, что прохождение транспортного средства должно быть более трудным для бокового транспортного средства, приближающегося к транспортному средству сзади. Поэтому, как показано на фиг.6, степень трудности прохождения оценивается более высокой, в то время как ширина бокового транспортного средства является большей. В этой связи эта последовательность операций выполняется при условии, что результат последовательности операций по этапу S7 состоит в том, что боковой объект отсутствует (Fd=0); однако, когда боковой объект может быть обнаружен в зоне (или второй зоне) позади нормальной зоны (или первой зоны), в которой обнаруживается присутствие или отсутствие бокового объекта, последовательность операций выполняется посредством оценки ширины транспортного средства у обнаруженного бокового объекта. В этой связи радарные устройства 6L, 6R в целом могут использоваться для выявления ширины транспортного средства у бокового транспортного средства и, например, выходные волны из радарных устройств 6L, 6R могут подвергаться сканированию в горизонтальном направлении, чтобы, тем самым, выявлять ширину транспортного средства на основании угла сканирования и отраженных волн.
5. Описанные выше способы с 1 по 4 используются в комбинации.
Например, выполняется расчет среднего значения, выбор нижнего или взвешивание и сложение.
Затем на этапе S9 установочные значения Xth и Tth, используемые для установки критериальных пороговых значений, которые будут описаны позже, рассчитываются согласно степени трудности прохождения. Здесь установочное значение Xth используется для установки критериального порогового значения для будущего поперечного положения Xf транспортного средства, а установочное значение Tth используется для установки критериального порогового значения для истекшего времени после момента, когда транспортное средство пересекает белую линию. Прежде всего, как показано на фиг.7, установочное значение Xth устанавливается меньшим, в то время как является более высокой степень трудности прохождения. К тому же, как показано на фиг.8, установочное значение Tth устанавливается меньшим, в то время как степень трудности прохождения является более высокой.
Затем на этапе S10 установочное значение Xth прибавляется к текущему поперечному положению Xe, чтобы, тем самым, устанавливать критериальное пороговое значение Xj для будущего поперечного положения Xf транспортного средства, как приведено ниже.
Xj=Xe+Xth
Затем на этапе S11 производится определение в отношении того, является или нет будущее поперечное положение Xf большим, чем критериальное пороговое значение Xj, то есть лежит или нет поперечное положение (или будущее поперечное положение) транспортного средства после истечения отслеживаемого наперед времени Tt вне полосы движения за пределами поперечного положения, которое является критериальным пороговым значением Xj, в стороне в направлении наружу из полосы движения относительно белой линии. Когда определенный результат состоит в том, что Xf является большим, чем Xj(Xf>Xj), производится определение, что транспортное средство начало вхождение в соседнюю полосу движения, для того чтобы перестроиться, и обработка переходит на этап S12. Между тем, когда определенный результат состоит в том, что Xf является равным или меньшим, чем Xj(Xf≤Xj), производится определение, что транспортное средство не начало вхождение в соседнюю полосу движения, и обработка переходит на этап S13.
В этой связи здесь, в варианте осуществления, как описан выше, производится определение, что транспортное средство начало вхождение в соседнюю полосу движения, когда поперечное положение транспортного средства после истечения отслеживаемого наперед времени Tt обнаружено находящимся в положении в направлении наружу из полосы движения (или к соседней полосе движения) за пределами положения на предопределенном расстоянии (то есть критериального порогового значения Xj) от белой линии, на основании поперечного положения (или будущего поперечного положения) транспортного средства после истечения отслеживаемого наперед времени Tt; однако настоящее изобретение не ограничено таким образом. Может производиться определение, что транспортное средство начало вхождение в соседнюю полосу движения, например, когда текущее поперечное положение Xe транспортного средства обнаружено являющимся равным или меньшим, чем предопределенное значение (например, равным или меньшим чем 0), на основании текущего поперечного положения Xe транспортного средства. Другими словами, любой подход будет действовать всего лишь при условии, что водитель может обнаруживать, что транспортное средство распознает, что оно начало вхождение в соседнюю полосу движения, на основании поперечного положения транспортного положения после истечения отслеживаемого наперед времени Tt или текущего поперечного положения Xe транспортного средства. Таким образом, Xth устанавливается в значение, полученное посредством заблаговременного экспериментального или иного определения значения, так чтобы водитель мог обнаруживать, что транспортное средство распознает, что оно уже начало вхождение в соседнюю полосу движения, на основании поперечного положения транспортного средства после истечения отслеживаемого наперед времени Tt и критериального порогового значения Xj.
На этапе S12 флажковый признак Fc подавления приведения в действие устанавливается в «1», а после этого обработка переходит на этап S16, который будет описан позже. Флажковый признак Fc подавления приведения в действие является флажковым признаком, который определяет, должно ли приведение в действие управления предотвращением сближения для предотвращения приближения к боковому объекту запрещаться или разрешаться, и флажковый признак Fc подавления приведения в действие устанавливается, с тем чтобы подавлять приведение в действие управления предотвращением сближения, когда Fc=1, или разрешать приведение в действие управления предотвращением сближения, когда Fc=0.
На этапе S13 производится определение в отношении того, является или нет будущее поперечное положение Xf большим, чем текущее поперечное положение Xe, то есть пересекло или нет белую линию поперечно положение транспортного средства после истечения отслеживаемого наперед времени Tt. Когда определенный результат состоит в том, что Xf является большим, чем Xe(Xf>Xe), производится определение, что транспортное средство начало перестроение, и обработка переходит на этап S14. Между тем, когда определенный результат состоит в том, что Xf является равным или меньшим, чем Xe(Xf≤Xe), производится определение, что транспортное средство не начало перестроение, и обработка переходит на этап S15.
На этапе S14 производится определение в отношении того, истекло или нет время Tth установки после момента, когда будущее поперечное положение пересекло белую линию. Здесь, когда определенный результат состоит в том, что время Tth установки истекло, производится определение, что транспортное средство начало вхождение в соседнюю полосу движения, и обработка переходит на этап S12. Между тем, когда определенный результат состоит в том, что время Tth установки не истекло, производится определение, что транспортное средство не начало вхождение в соседнюю полосу движения, и обработка переходит на этап S15. Другими словами, даже если на этапе S11 произведено определение, что транспортное средство не начало вхождение в соседнюю полосу движения (то есть будущее поперечное положение Xf является равным или меньшим, чем критериальное пороговое значение Xj(Xf≤Xj)), есть сильная вероятность, что транспортное средство начало вхождение в соседнюю полосу движения, когда будущее поперечное положение Xf продолжает оставаться в состоянии, в котором оно является большим, чем текущее поперечное положение Xe, в течение предопределенного времени (которое является временем Tth установки, например 3 с). Таким образом, когда на этапе S14 сделано определение, что время Tth установки истекло, производится определение, что транспортное средство начало вхождение в соседнюю полосу движения, и обработка переходит на этап S12. В этой связи время Tth установки устанавливается во время, полученное заблаговременно посредством эксперимента или тому подобного.
На этапе S15 флажковый признак Fc подавления приведения в действие сбрасывается в «0», а после этого обработка переходит на этап S20, который будет описан позже.
На этапе S16 производится определение в отношении того, следует ли отменять установку флажкового признака Fc подавления приведения в действие (Fc=1) или нет, то есть следует ли сбрасывать флажковый признак Fc подавления приведения в действие в «0» (Fc=0). Условия для отмены установки флажкового признака Fc подавления приведения в действие для переключения его из Fc=1 в Fc=0 являются следующими условиями с 1 по 3. Здесь, когда условия отмены удовлетворены, обработка переходит на этап S15. Между тем, когда условия отмены не удовлетворены, обработка переходит на этап S20, который будет описан позже.
1. Условие, основанное на истекшем времени
Когда предопределенное время (например, около 2 с) истекает после момента, когда было сделано определение, что транспортное средство начало вхождение в соседнюю полосу движения, транспортное средство может оцениваться в качестве почти завершившего перестроение. Поэтому измеряется продолжительность истекшего времени после момента установки флажкового признака Fc подавления приведения в действие в «1» (Fc=1) и, когда истекает предопределенное время, производится определение, что условие отмены удовлетворено. Между тем, когда предопределенное время не истекает после момента установки флажкового признака Fc подавления приведения в действие в «1» (Fc=1), перестроение транспортного средства не завершено и производится определение, что условие отмены не удовлетворено.
2. Условие, основанное на величине перемещения транспортного средства в сторону
Когда величина перемещения транспортного средства в сторону (то есть величина изменения поперечного положения транспортного средства) после момента, когда было произведено определение, что транспортное средство начало вхождение в соседнюю полосу движения, достигает предопределенной величины перемещения в сторону, транспортное средство может оцениваться в качестве почти завершившего перестроение. Поэтому рассчитывается величина перемещения в сторону после момента установки флажкового признака Fc подавления приведения в действие в «1» (Fc=1) и, когда предопределенная величина перемещения в сторону превышена, производится определение, что удовлетворено условие отмены. Между тем, когда предопределенная величина перемещения в сторону не превышена после момента установки флажкового признака Fc подавления приведения в действие в «1» (Fc=1), перестроение транспортного средства не завершено и производится определение, что условие отмены не удовлетворено.
3. Условие, основанное на поперечном положении транспортного средства
Когда поперечное положение транспортного средства достигает предопределенного поперечного положения, транспортное средство может оцениваться в качестве почти завершившего перестроение. Поэтому, когда текущее поперечное положение Xe транспортного средства пересекает предопределенное поперечное положение, производится определение, что удовлетворено условие отмены. Между тем, когда предопределенное поперечное положение не пересечено, перестроение транспортного средства не завершается и выполняется определение, что условие отмены не удовлетворено. В этой связи в этом случае предопределенное поперечное положение, например, является поперечным положением, установленным в положении в соседней полосе движения, и устанавливается в положение, полученное экспериментальным или иным определением положения, так чтобы водитель распознавал, что перестроение завершено, и, например, устанавливается в положение, которое является половиной размера ширины транспортного средства или более в стороне от белой линии в направлении к соседней полосе движения.
Между тем на этапе S17 производится определение в отношении того, установлен или нет флажковый признак Fc подавления приведения в действие в «1» (Fc=1). Когда определенный результат состоит в том, что Fc=1, обработка переходит на этап S16, для того чтобы подавлять приведение в действие управления предотвращением сближения. Между тем, когда определенный результат состоит в том, что Fc=0, приведение в действие управления предотвращением сближения может разрешаться, и, таким образом, обработка переходит на этап S18.
На этапе S18 установочное значение Xo, меньшее чем установочное значение Xth, прибавляется к текущему поперечному положению Xe, чтобы, тем самым, устанавливать пороговое значение Xa приведения в действие для управления предотвращением сближения для предотвращения приближения к боковому объекту, как приведено ниже:
Xa=Xe+Xo
Здесь расстояние между поперечным положением транспортного средства и текущим поперечным положением бокового объекта определено в качестве порогового значения Xa приведения в действие. Вкратце, как показано на фиг.9, пороговое значение Xa приведения в действие является расстоянием в поперечном направлении между транспортным средством и боковым объектом, при условии что боковой объект (или боковое транспортное средство) находится в предопределенном положении, которое находится на предопределенную величину Xo в стороне за пределами полосы движения относительно белой линии. Другими словами, когда присутствует боковое транспортное средство, движущееся вдоль соседней полосы движения, расстояние от возможного поперечного положения движущегося бокового транспортного средства до белой линии предполагается и устанавливается в качестве предопределенной величины Xo. Конечно, когда относительное расстояние Xd до бокового объекта в поперечном направлении может быть выявлено, поперечное положение на относительном расстоянии Xd от текущего поперечного положения Xe определяется в качестве порогового значения Xa приведения в действие. К тому же положение белой линии вместо текущего поперечного положения бокового объекта может быть определено в качестве порогового значения Xa приведения в действие.
Затем на этапе S19 производится определение в отношении того, является или нет будущее поперечное положение Xf большим, чем пороговое значение Xa приведения в действие, то есть находится или нет будущее поперечное положение Xf за пределами порогового значения Xa приведения в действие. Когда определенный результат состоит в том, что будущее поперечное положение Xf является меньшим, чем пороговое значение Xa приведения в действие (Xf В этой связи, для того чтобы предотвращать неустойчивую работу определения касательно приведения в действие, гистерезис может быть предусмотрен для Xf или останов приведения в действие может быть запрещен до тех пор, пока не истекает предопределенное время после начала приведения в действие управления предотвращением сближения. К тому же, когда выполняется противоскользящее управление, регулирование тягового усилия, управление устойчивостью или тому подобное, приведение в действие управления предотвращением сближения может подавляться, для того чтобы противоскользящее или другое управление имело приоритет над управлением предотвращением сближения. Затем на этапе S20 управление предотвращением сближения делается неактивным, и обработка возвращается в предопределенную основную программу. Более точно, не нужно сдерживать перестроение транспортного средства, и, таким образом, целевой поворачивающий момент Ms устанавливается равным 0 (Ms=0) для остановки возбуждения привода 3 тормозов. Другими словами, давление главного цилиндра подается на колесные цилиндры, как задано ниже: PFL=PFR=Pm PRL=PRR=Pmr где Pmr обозначает давление главного цилиндра задних колес на основании идеального распределения передней и задней тормозных сил. Между тем, на этапе S21 целевой поворачивающий момент Ms рассчитывается для того, чтобы привести в действие управление предотвращением сближения, и привод 3 тормозов с приведением в движение управляется согласно рассчитанному целевому поворачивающему моменту Ms. Прежде всего, целевой поворачивающий момент Ms для предотвращения приближения транспортного средства к боковому объекту рассчитываается, как приведено ниже: Ms=Kr1×Kr2×(Km1×φ+Km2×Ψm) где Kr1 обозначает коэффициент усиления, определенный из технических условий транспортного средства, а Kr2 обозначает коэффициент усиления, определенный согласно скорости V транспортного средства и становится больше, в то время как выше скорость V транспортного средства. Согласно вышеприведенному уравнению, целевой поворачивающий момент Ms для подавления перестроения транспортного средства становится больше по мере того, как становится больше угол рыскания φ или целевая скорость Ψm рыскания. В таком случае рассчитываются целевые гидравлические давления с PFL по PRR колесных цилиндров. Прежде всего, как дано ниже, рассчитываются разности ΔPf и ΔPr тормозных сил между левым и правым колесами с целью сдерживания перестроения: ΔPf=2×Kf×{Ms×R}/T ΔPr=2×Kr×{Ms×(1-R)}/T где T обозначает протектор и ради удобства предполагается, что передний протектор является таким же, как задний протектор, Kf и Kr обозначают коэффициенты для преобразования тормозных сил в гидравлические давления, для передних и задних колес соответственно, и определяются техническими условиями тормозов, а R обозначает распределение тормозных сил между передними и задними колесами. Поэтому для перестроения в левом направлении целевые гидравлические давления с PFL по PRR колесных цилиндров рассчитываются для того, чтобы сообщать поворачивающий момент транспортному средству в правом направлении, как приведено ниже. PFL=Pm PFR=Pm+ΔPf PRL=Pmr PRR=Pmr+ΔPr Между тем, для перестроения в правом направлении целевые гидравлические давления с PFL по PRR колесных цилиндров рассчитываются для того, чтобы сообщать поворачивающий момент транспортному средству в левом направлении, как приведено ниже. PFL=Pm+ΔPf PFR=Pm PRL=Pmr+ΔPr PRR=Pmr В таком случае привод 3 тормозов с возможностью приведения в движение управляется для создания целевых гидравлических давлений с PFL по PRR в колесных цилиндрах, а предупреждающее устройство 20 побуждается выдавать предупреждение для уведомления водителя о присутствии бокового объекта или сдерживании перестроения, а после этого обработка возвращается в предопределенную основную программу. В этой связи необходимо выдавать предупреждение одновременно с тем, как управляется привод 3 тормозов с возможностью приведения в движение, и, таким образом, конфигурация может быть такой, что пороговое значение Xw приведения в действие для выдачи предупреждения и пороговое значение Xy приведения в действие для сообщения поворачивающего момента готовятся отдельно для будущего поперечного положения Xf, и пороговое значение Xw приведения в действие для предупреждения устанавливается относительно меньшим, чем пороговое значение Xy приведения в действие для управления поворачивающим моментом (Xw Операции Далее будет предполагаться, что, как показано на фиг.9, транспортное средство водителя собирается перестроиться, чтобы попасть в правую соседнюю полосу движения, согласно задействованию водителем переключателя 13 указателя поворота в правом направлении, а боковое транспортное средство является едущим с правой стороны от транспортного средства и немного позади транспортного средства, что, возможно, может находиться на закрытом от водителя участке обзора. Прежде всего, радарное устройство 6R обнаруживает боковое транспортное средство (на этапе S3). Затем (на этапе S5) рассчитывается будущее поперечное положение Xf в качестве расстояния в поперечном направлении между текущим поперечным положением транспортного средства и его поперечным положением, которого транспортное средство достигает после истечения отслеживаемого наперед времени (например, 1 с), и, когда будущее поперечное положение Xf достигает порогового значения Xa приведения в действие (то есть, когда определенным результатом является «Нет» на этапе S19), делается определение, что есть вероятность вхождения в контакт транспортного средства с боковым транспортным средством. Затем, для того чтобы предотвратить приближение транспортного средства к боковому объекту, поворачивающий момент в левом направлении вырабатывается посредством разностей тормозных сил между левыми и правыми колесами, и выдается предупреждение, чтобы уведомить водителя о присутствии бокового объекта (на этапе S21). Это предоставляет водителю возможность распознавать присутствие бокового транспортного средства и дает возможность побуждения водителя подождать случая для перестроения до тех пор, пока боковое транспортное средство не проезжает мимо транспортного средства. В этой связи предполагается, что в отсутствие других транспортных средств, приближающихся сзади, транспортное средство начинает перестроение, чтобы войти в соседнюю полосу движения, а после того как транспортное средство начало вхождение в соседнюю полосу движения, другое транспортное средство является приближающимся сзади в целевой полосе движения. В этом случае может быть надлежащим, чтобы транспортное средство предпочтительнее быстро завершило перестроение, чем прекращало перестроение, чтобы уступить дорогу другому транспортному средству, приближающемуся сзади. Другими словами, право преимущественного проезда меняется согласно обстоятельствам по случаю, а потому водитель, вероятно, может чувствовать себя некомфортно, если перестроение неизменно сдерживается всякий раз, когда обнаруживается приближение другого транспортного средства сзади. Поэтому, когда в отсутствие обнаружения бокового объекта транспортное средство начинает вхождение в соседнюю полосу движения, для того чтобы перестроиться, приведение в действие управления предотвращения сближения подавляется, даже если боковой объект появляется после начала вхождения. Тем самым, может предотвращаться ненадлежащее вмешательство в управление, то есть приведение в действие управления предотвращения сближения. Более точно, в отсутствие обнаружения бокового объекта (то есть когда результатом определения является «Да» на этапе S7), производится определение в отношении того, начало или нет транспортное средство вхождение в соседнюю полосу движения. Здесь, когда поперечное положение транспортного средства после истечения отслеживаемого наперед времени (в дальнейшем иногда указываемое ссылкой как будущее поперечное положение) находится в соседней полосе движения (то есть будущее поперечное положение Xf является большим, чем текущее поперечное положение Xe), или поперечное положение (или будущее поперечное положение) транспортного средства после истечения отслеживаемого наперед времени лежит в направлении соседней полосы движения относительно положения, которое является предопределенным критериальным пороговым значением Xj от белой линии (то есть когда определенным результатом является «Да» на этапе S11), выполняется определение, что транспортное средство начало вхождение в соседнюю полосу движения и флажковый признак Fc подавления приведения в действие устанавливается в «1» (Fc=1) (на этапе S12). К тому же когда истекает предопределенное время Tth установки после момента, когда будущее поперечное положение транспортного средство пересекло белую линию (то есть после момента, когда будущее поперечное положение Xf стало большим, чем текущее поперечное положение Xe) (то есть когда определенным результатом является «Да» на этапе S14), производится определение, что транспортное средство начало вхождение в соседнюю полосу движения и флажковый признак Fc подавления приведения в действие устанавливается в «1» (Fc=1) (на этапе S12). Таким образом, устройство контроля вождения сконфигурирован для обнаружения, что будущее поперечное положение транспортного средства пересекло поперечное положение, которое является критериальным пороговым значением Xj в стороне в направлении к внутренней части соседней полосы движения относительно белой линии или что истекает время Tth установки после момента, когда будущее поперечное положение транспортного средства пересекло белую линию, а потому может с легкостью и точностью определять, что транспортное средство начало вхождение в соседнюю полосу движения. Здесь будет дано описание в отношении того, как следует определять критериальное пороговое значение Xj и время Tth установки. Прежде всего, степень трудности прохождения транспортного средства для бокового объекта, приближающегося к транспортному средству сзади в целевой полосе движения, оценивается в состоянии, где транспортное средство начало вхождение в соседнюю полосу движения (этап S8). Более точно, степень трудности прохождения транспортного средства оценивается высокой, когда ширина полосы движения у целевой полосы движения узка, когда кривизна дороги велика, когда целевая полоса движения является полосой движения для машин, в которых едут два и более человека, включая водителя, или когда велика ширина транспортного средства у бокового транспортного средства. В то время как степень трудности прохождения является более высокой, боковой объект, приближающийся сзади, более вероятно должен уступать дорогу транспортному средству, что является ситуацией, где может быть надлежащим, чтобы транспортное средство быстро завершило перестроение. Поэтому критерий суждения, то есть критериальное пороговое значение Xj или время Tth установки устанавливается с тем, чтобы делать более легким для определения, что транспортное средство начало вхождение в соседнюю полосу движения, в то время как степень трудности прохождения является более высокой. Более точно, в то время как степень трудности является более высокой, установочное значение Xth устанавливается меньшим, чтобы, тем самым, устанавливать критериальное пороговое значение Xj меньшим и, таким образом, делать более легким для определения, что транспортное средство начало вхождение в соседнюю полосу движения (на этапах S9 и S10). К тому же в то время как степень трудности является более высокой, время Tth установки устанавливается более коротким, чтобы, тем самым, делать более легким для определения, что транспортное средство начало вхождение в соседнюю полосу движения (на этапе S9). Таким образом, устройство контроля вождения сконфигурировано, чтобы делать более легким для определения, что транспортное средство начало вхождение в соседнюю полосу движения, в то время как степень трудности прохождения, с которой боковое транспортное средство может проходить транспортное средство, является более высокой, и, тем самым, устройство может определять в более раннее время, что транспортное средство начало вхождение в соседнюю полосу движения. Поэтому в ситуации, где может быть надлежащим, чтобы транспортное средство быстро завершало перестроение, флажковый признак Fc подавления приведения в действие устанавливается в «1» (Fc=1) в более раннее время, чтобы, тем самым, определять подавление приведения в действие управления предотвращением сближения в более раннее время и, таким образом, давать возможность предохранения водителя от ощущения себя некомфортно с более высокой надежностью. Затем будет дано описание касательно условий для отмены подавления управления предотвращением сближения. Когда перестроение транспортного средства завершается и может быть сделано определение, что нет возможности прохождения транспортного средства боковым транспортным средством, приведение в действие управления предотвращением сближения может отменяться. Поэтому, когда истекает предопределенное время после момента, когда было сделано определение, что транспортное средство начало вхождение в соседнюю полосу движения, когда величина перемещения транспортного средства в сторону достигает предопределенной величины перемещения в сторону или когда текущее поперечное положение Xe транспортного средства пересекает предопределенное поперечное положение в соседней полосе движения (то есть когда определенным результатом является «Да» на этапе S16), транспортное средство оценивается в качестве почти завершившего перестроение и флажковый признак Fc подавления приведения в действие сбрасывается в «0» (Fc=0) (на этапе S15). Это дает возможность избежания ненужного подавления управления предотвращением сближения. Модификации В этой связи в варианте осуществления критериальное пороговое значение Xj или время Tth установки изменяется, для того чтобы делать легче, для определения, что транспортное средство начало вхождение в соседнюю полосу движения, в то время как степень трудности прохождения является более высокой; однако другой подход также возможен. Другими словами, как описано выше, в варианте осуществления подавление управления предотвращением сближения выполняется при двух условиях: для «обнаружения, что транспортное средство начало вхождение в соседнюю полосу движения» в «отсутствие обнаружения бокового объекта», а потому становление более легким для «обнаружения, что транспортное средство начало вхождение в соседнюю полосу движения», в качестве одного из двух условий, в то время как степень трудности прохождения является более высокой, делает более легким для подавления управление предотвращением сближения, в то время как степень трудности прохождения является более высокой. Однако вкратце, для того чтобы делать более легким для подавления управление предотвращением сближения, любое одно из двух условий: для «обнаружения, что транспортное средство начало вхождение в соседнюю полосу движения» в «отсутствие обнаружения бокового транспортного средства» активно создается, чтобы, тем самым, дать возможность становления более легким для подавления управления предотвращением сближения, а потому может активно создаваться (или продвигаться) «отсутствие обнаружения бокового транспортного средства» в качестве другого из двух условий, чтобы, тем самым, делать более легким для подавления управление предотвращением сближения. Поэтому дальность обнаружения устанавливается на основании карты, такой как показано на фиг.10, согласно степени трудности прохождения, и, как показано на фиг.11, зона обнаружения бокового объекта радарными устройствами 6L, 6R также может устанавливаться более узкой, в то время как степень трудности прохождения является более высокой, чтобы, тем самым, делать более легким для подавления управление предотвращением сближения. Это также дает возможность становления более легким подавлять управление предотвращением сближения, в то время как является более высокой степень трудности прохождения и, таким образом, может содействовать подавлению приведения в действие управления предотвращением сближения, в ситуации, где степень трудности прохождения высока, и может быть надлежащим, чтобы транспортное средство быстро завершало перестроение. Кроме того, в варианте осуществления, когда транспортное средство начинает вхождение в соседнюю полосу движения, управление предотвращением сближения делается полностью неактивным; однако настоящее изобретение не является ограниченным таким образом, и, например, рабочий режим может устанавливаться, с тем чтобы делать трудным для определения начало приведения в действие управления предотвращением сближения, чтобы, тем самым, подавлять определение начала приведения в действие управления предотвращением сближения. К тому же во время управления предотвращением сближения может уменьшаться величина управляющего воздействия. Это также дает возможность подавления приведения в действие управления для подавления перемещения транспортного средства в сторону по направлению к боковому объекту. Прежде всего, для того чтобы сделать трудным для определения начала приведения в действие управления предотвращением сближения, по меньшей мере одно из будущего поперечного положения Xf и порогового значения Xa приведения в действие может корректироваться в направлении друг от друга, с тем чтобы делать трудным, чтобы будущее поперечное положение Xf пересекало пороговое значение Xa приведения в действие. Другими словами, будущее поперечное положение Xf корректируется, чтобы быть меньшим (то есть будущее поперечное положение корректируется в направлении внутрь полосы движения), или пороговое значение Xa приведения в действие корректируется, чтобы быть большим. Это дает возможность становления трудным приводить в действие управление предотвращением сближения и, таким образом, подавления приведения в действие управления для сдерживания перемещения транспортного средства в сторону по направлению к боковому объекту. Кроме того, как показано на фиг.11, зона обнаружения бокового объекта радарными устройствами 6L, 6R может быть установлена более узкой, чтобы, тем самым, делать трудным для приведения в действие управление предотвращением сближения, как происходит в случае с приведенным выше. В этом случае, как показано на фиг.11, ширина зоны обнаружения не изменяется, и положение задней части зоны сдвигается по направлению вперед, с тем чтобы обнаруживать боковой объект только справа сбоку от транспортного средства. Это дает возможность становления трудным для приведения в действие управления предотвращением сближения. Также для того чтобы уменьшать величину управляющего воздействия во время управления предотвращением сближения, целевой поворачивающий момент Ms может корректироваться, с тем чтобы убывать, или могут уменьшаться звуковые сигналы предупреждения. Это дает возможность уменьшения величины управляющего воздействия во время управления предотвращением сближения и, таким образом, подавления приведения в действие управления для подавления перемещения транспортного средства в сторону по направлению к боковому объекту. Также в варианте осуществления разности тормозных сил между левыми и правыми колесами используются для достижения целевого поворачивающего момента Ms; однако также возможен другой подход. Рулевое управление с электрическим усилителем или тому подобное, например, может использоваться для управления колесами рулевого управления в направлении, противоположном перестроению, и, тем самым, добиваться целевого поворачивающего момента Ms. Также в варианте осуществления степень трудности прохождения оценивается посредством обращения к ширине полосы движения у целевой полосы движения, кривизне дороги, типу полосы проезжей части у целевой полосы движения или ширине транспортного средства у бокового транспортного средства; однако также возможны другие подходы. Например, в то время как поверхность дороги полосы движения имеет более низкий коэффициент трения, поверхность дороги соседней полосы движения также имеет более низкий коэффициент трения, и, таким образом, может ожидаться, что прохождение транспортного средства должно быть более трудным для бокового транспортного средства, приближающегося к транспортному средству сзади. Поэтому степень трудности прохождения может оцениваться более высокой, в то время как коэффициент трения поверхности дороги является более низким. Полезные результаты В соответствии с вышеприведенным, обработка для обнаружения в первой зоне обнаружения радарными устройствами 6L, 6R соответствует «первому средству обнаружения бокового объекта», обработка по этапам с S18 по S21 соответствует «средству управления», обработка по этапам S7, с S9 по S11, S13 и S14 соответствует «средству определения начала вхождения», а обработка по этапам S12 и с S15 по S17 соответствует «средству подавления приведения в действие». Кроме того, обработка по этапу S5 соответствует «средству оценки будущего поперечного положения», обработка по этапу S8 соответствует «средству оценки степени трудности», а обработка для обнаружения во второй зоне обнаружения радарными устройствами 6L, 6R соответствует «второму средству обнаружения бокового объекта». (1) Устройство контроля вождения согласно настоящему варианту осуществления включает в себя первое средство обнаружения бокового объекта для обнаружения присутствия бокового объекта сбоку от транспортного средства, а также позади транспортного средства. Средство управления для приведения в действие управления для сдерживания перемещения транспортного средства в сторону по направлению к боковому объекту, когда первое средство обнаружения бокового объекта обнаруживает боковой объект; средство определения начала вхождения для определения, начало или нет транспортное средство вхождение в соседнюю полосу движения, для того чтобы перестроиться, в отсутствие обнаружения бокового объекта первым средством обнаружения бокового объекта; и средство подавления приведения в действие для подавления приведения в действие управления средством управления, когда средство обнаружения начала вхождения определяет, что транспортное средство начало вхождение в соседнюю полосу движения. Таким образом, когда в отсутствие обнаружения бокового объекта транспортное средство начинает вхождение в соседнюю полосу движения, для того чтобы перестроиться, приведение в действие управления подавляется, даже если боковой объект обнаружен после начала вхождения, а потому предотвращается ненадлежащее вмешательство в управление. (2) Кроме того, устройство контроля вождения включает в себя средство оценки будущего поперечного положения для оценки будущего поперечного положения транспортного средства, то есть поперечного положения, которое транспортное средство достигает после истечения предопределенного времени, относительно линии разметки полос движения, обозначенной на поверхности дороги, и средство определения начала вхождения определяет, что транспортное средство начало вхождение в соседнюю полосу движения, когда в отсутствие обнаружения бокового объекта первым средством обнаружения бокового объекта будущее поперечное положение, оцененное средством оценки будущего поперечного положения, находится в соседней полосе движения и находится вне предопределенного поперечного положения в качестве первого критериального порогового значения. Таким образом, устройство контроля вождения сконфигурировано для обнаружения, что будущее поперечное положение находится вне критериального порогового значения, а потому может определять с легкостью и точностью, что транспортное средство начало вхождение в соседнюю полосу движения. (3) Дополнительно устройство контроля вождения включает в себя средство оценки будущего поперечного положения для оценки будущего поперечного положения транспортного средства, то есть поперечного положения, которое транспортное средство достигает после истечения предопределенного времени, относительно линии разметки полос движения, обозначенной на поверхности дороги, и средство определения начала вхождения определяет, что транспортное средство начало вхождение в соседнюю полосу движения, когда в отсутствие обнаружения бокового объекта первым средством обнаружения бокового объекта предопределенное время в качестве второго критериального порогового значения истекает до момента, когда будущее поперечное положение, оцененное средством оценки будущего поперечного положения, пересекло линию разметки полос движения по направлению к соседней полосе движения. Таким образом, устройство контроля вождения сконфигурировано для обнаружения, что предопределенное время истекает после момента, когда будущее поперечное положение пересекло линию разметки полос движения, а потому может определять с легкостью и точностью, что транспортное средство начало вхождение в соседнюю полосу движения. (4) Кроме того, устройство контроля вождения включает в себя средство оценки степени трудности для оценки степени трудности прохождения транспортного средства для бокового объекта, приближающегося к транспортному средству сзади в целевой соседней полосе движения, в состоянии, где транспортное средство начало вхождение в соседнюю полосу движения, и средство определения начала вхождения устанавливает критерий суждения, с тем чтобы делать более легким для определения, что транспортное средство начало вхождение в соседнюю полосу движения, в то время как степень трудности, оцененная средством оценки степени трудности, является более высокой. Обычно, в то время как степень трудности прохождения является более высокой, боковой объект, приближающийся сзади, более вероятно уступает дорогу транспортному средству, и, таким образом, может быть надлежащим, чтобы транспортное средство быстро завершило перестроение. Поэтому устройство контроля вождения сконфигурировано, чтобы делать более легким для определения, что транспортное средство начало вхождение в соседнюю полосу движения, в то время как степень трудности прохождения является более высокой, и, тем самым, в ситуации, где может быть надлежащим, чтобы транспортное средство быстро завершило перестроение, приведение в действие управления становится более легким для подавления, так что может предотвращаться ненадлежащее вмешательство в управление. (5) Средство определения начала вхождения делает более легким для определения, что транспортное средство начало вхождение в соседнюю полосу движения, устанавливая предопределенное поперечное положение в качестве первого критериального порогового значения в положение, более близкое к линии разметки полос движения, в то время как степень трудности, оцененная средством оценки степени трудности, является более высокой. Таким образом, устройство контроля вождения сконфигурировано для установки предопределенного поперечного положения в положение, более близкое к линии разметки полос движения, так что можно содействовать более легкому определению того, что транспортное средство начало вхождение в соседнюю полосу движения. (6) Средство определения начала вхождения делает более легким для определения, что транспортное средство начало вхождение в соседнюю полосу движения, устанавливая более короткое предопределенное время в качестве второго критериального порогового значения, в то время как степень трудности, оцененная средством оценки степени трудности, является более высокой. Таким образом, устройство контроля вождения сконфигурировано для установки предопределенного времени более коротким, так что можно содействовать более легкому определению того, что транспортное средство начало вхождение в соседнюю полосу движения. (7) Средство определения начала вхождения делает более легким для определения, что транспортное средство начало вхождение в соседнюю полосу движения, устанавливая более узкую зону обнаружения бокового объекта первым средством обнаружения бокового объекта, в то время как степень трудности, оцененная средством оценки степени трудности, является более высокой. Таким образом, устройство контроля вождения сконфигурировано для установки зоны обнаружения бокового объекта более узкой, а потому может содействовать становлению более легким для определения, что транспортное средство начало вхождение в соседнюю полосу движения. (8) Средство оценки степени трудности оценивает, что степень трудности прохождения транспортного средства является более высокой, в то время как ширина полосы движения у целевой полосы движения является более узкой. Таким образом, устройство контроля вождения сконфигурировано для оценки степени трудности согласно ширине целевой полосы движения, так что можно содействовать оценке степени трудности прохождения транспортного средства. (9) Средство оценки степени трудности оценивает, что степень трудности прохождения транспортного средства является более высокой, в то время как кривизна дороги является большей. Таким образом, устройство контроля вождения сконфигурировано для оценки степени трудности согласно кривизне дороги, так что можно содействовать оценке степени трудности прохождения транспортного средства. (10) Средство оценки степени трудности оценивает, что степень трудности прохождения транспортного средства является более высокой, когда целевая полоса движения является полосой движения для машин, в которых едут два и более человек, включая водителя, чем когда целевая полоса движения не является полосой движения для машин, в которых едут два и более человек, включая водителя. Таким образом, устройство контроля вождения сконфигурировано для оценки степени трудности согласно тому, является или нет целевая полоса движения полосой движения для машин, в которых едут два и более человек, включая водителя, так что можно содействовать оценке степени трудности прохождения транспортного средства. (11) К тому же устройство контроля вождения включает в себя второе средство обнаружения бокового объекта для обнаружения бокового объекта, присутствующего сбоку от транспортного средства и позади транспортного средства дальше от зоны обнаружения бокового объекта средством обнаружения бокового объекта, и средство оценки степени трудности оценивает, что степень трудности прохождения транспортного средства является более высокой, в то время как ширина транспортного средства бокового объекта, обнаруженного вторым средством обнаружения бокового объекта, является большей, когда в отсутствие обнаружения бокового объекта первым средством обнаружения бокового объекта второе средство обнаружения бокового объекта обнаруживает боковой объект. Таким образом, устройство контроля вождения сконфигурировано для оценки степени трудности согласно ширине транспортного средства бокового объекта, так что оно может содействовать оценке степени трудности прохождения транспортного средства. (12) Средство подавления приведения в действие подавляет приведение в действие управления средством управления до тех пор, пока не истекает предопределенное время в качестве первого условия отмены после момента, когда средство определения начала вхождения определило, что транспортное средство начало вхождение в соседнюю полосу движения. Таким образом, устройство контроля вождения сконфигурировано для обнаружения истечения предопределенного времени и, тем самым, отмены подавления приведения в действие, так что оно может избегать ненужного подавления приведения в действие управления. (13) Средство подавления приведения в действие подавляет приведение в действие управления средством управления до тех пор, пока величина перемещения транспортного средства в сторону не достигает предопределенной величины перемещения в сторону в качестве второго условия отмены после момента, когда средство определения начала вхождения определило, что транспортное средство начало вхождение в соседнюю полосу движения. Таким образом, устройство контроля вождения сконфигурировано для отмены подавления приведения в действия посредством обнаружения, что достигнута предопределенная величина перемещения в сторону, так что можно избегать ненужного подавления приведения в действие управления. (14) Средство подавления приведения в действие подавляет приведение в действие управления средством управления до тех пор, пока поперечное положение транспортного средства относительно линии разметки полос движения, обозначенной на поверхности дороги, не достигает предопределенного поперечного положения в качестве третьего условия отмены после момента, когда средство определения начала вхождения определило, что транспортное средство начало вхождение в соседнюю полосу движения. Таким образом, устройство контроля вождения сконфигурировано для отмены подавления приведения в действия посредством обнаружения, что достигнуто предопределенное поперечное положение, так что можно избегать ненужного подавления приведения в действие управления. (15) Кроме того, устройство контроля вождения включает в себя средство оценки будущего поперечного положения для оценки будущего поперечного положения транспортного средства, то есть поперечного положения, которое транспортное средство достигает после истечения предопределенного времени, относительно линии разметки полос движения, обозначенной на поверхности дороги, и средство управления приводит в действие управление для подавления перемещения транспортного средства в сторону по направлению к боковому объекту, когда в присутствии обнаружения бокового объекта первым средством обнаружения бокового объекта будущее поперечное положение, оцененное средством оценки будущего поперечного положения, пересекает предопределенное поперечное положение в качестве порогового значения приведения в действие по направлению к боковому объекту. Таким образом, устройство контроля вождения сконфигурировано для приведения в действие управления для подавления перемещения транспортного средства в сторону, когда будущее поперечное положение пересекает пороговое значение приведения в действие, так что обеспечивается надлежащее вмешательство в управление. (16) Средство подавления приведения в действие подавляет приведение в действие управления средством управления, корректируя по меньшей мере любое одно из будущего поперечного положения и предопределенного поперечного положения в качестве порогового значения приведения в действие, с тем чтобы сделать трудным, чтобы будущее поперечное положение пересекало предопределенное поперечное положение в качестве порогового значения приведения в действие. Таким образом, устройство контроля вождения сконфигурировано для коррекции по меньшей мере любого одного из будущего поперечного положения и порогового значения приведения в действие, с тем чтобы сделать более трудным, чтобы будущее поперечное положение переходило пороговое значение приведения в действие, так что можно содействовать подавлению приведения в действие управления. (17) Средство подавления приведения в действие подавляет приведение в действие управление средством управления, устанавливая более узкую зону обнаружения бокового объекта первым средством обнаружения бокового объекта. Таким образом, устройство контроля вождения сконфигурировано для сужения зоны обнаружения бокового объекта, так что можно содействовать подавлению приведения в действие. (18) Средство управления сообщает поворачивающий момент в направлении, противоположном стороне бокового объекта, транспортному средству в качестве управления для подавления перемещения транспортного средства в сторону по направлению к боковому объекту. Таким образом, устройство контроля вождения сконфигурировано для сообщения поворачивающего момента в направлении, противоположном стороне бокового объекта, транспортному средству, так что обеспечивается возможность эффективного подавления перемещения транспортного средства в сторону по направлению к боковому объекту. (19) Средство подавления приведения в действие подавляет приведение в действие управление средством управления, сдерживая поворачивающий момент в направлении, противоположном стороне бокового объекта, сообщенный транспортному средству. Таким образом, устройство контроля вождения сконфигурировано для сдерживания поворачивающего момента в направлении, противоположном стороне бокового объекта, так что можно содействовать подавлению приведения в действие управления. (20) Средство управления выдает предупреждение для уведомления водителя о присутствии бокового объекта в качестве управления для подавления перемещения транспортного средства в сторону по направлению к боковому объекту. Таким образом, устройство контроля вождения сконфигурировано для выдачи предупреждения, чтобы уведомлять водителя о присутствии бокового объекта, так что можно обеспечить эффективное подавление перемещения транспортного средства в сторону по направлению к боковому объекту. (21) Средство подавления приведения в действие подавляет приведение в действие управления, подавляя предупреждение о присутствии бокового объекта водителю. Таким образом, устройство контроля вождения сконфигурировано для подавления предупреждения о присутствии бокового объекта водителю, так что можно содействовать подавлению приведения в действие управления. (22) Средство подавления приведения в действие запрещает приведение в действие управления средством управления до тех пор, пока не удовлетворено предопределенное условие после момента, когда средство определения начала вхождения определило, что транспортное средство начало вхождение в соседнюю полосу движения. Таким образом, устройство контроля вождения сконфигурировано для запрета приведения в действие управления, так что можно предотвращать ненадлежащее вмешательство в управление. (23) В устройстве контроля вождения управление для подавления перемещения транспортного средства в сторону по направлению к боковому объекту приводится в действие, когда обнаружен боковой объект, присутствующий сбоку от транспортного средства, а также позади транспортного средства, и приведение в действие управления подавляется, даже если боковой объект обнаружен, когда в отсутствие обнаружения бокового объекта транспортное средство начинает вхождение в соседнюю полосу движения, для того чтобы перестроиться. Таким образом, когда в отсутствие обнаружения бокового объекта транспортное средство начинает вхождение в соседнюю полосу движения, для того чтобы перестроиться, приведение в действие управления подавляется, даже если боковой объект обнаружен после начала вхождения, так что предотвращается ненадлежащее вмешательство в управление. Эта заявка основана и испрашивает преимущество приоритета предшествующей заявки на выдачу патента Японии № 2009-292705, поданной 24 декабря 2009 г. и предшествующей заявки на выдачу патента Японии № 2010-256594, поданной 17 ноября 2010 г., полное содержание которых включено в материалы настоящей заявки посредством ссылки. ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ Согласно настоящему устройству контроля вождения по настоящему изобретению, когда в отсутствие обнаружения бокового объекта транспортное средство начинает вхождение в соседнюю полосу движения, для того чтобы перестроиться, приведение в действие управления подавляется, даже если боковой объект обнаружен после начала вхождения, так что предотвращается ненадлежащее вмешательство в управление. ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ 2FL-2RR - колесные цилиндры 3 - привод тормозов 4 - контроллер 5 - камера 6L, 6R - радарные устройства 10 - датчик давления 11 - датчик угла поворота управляемых колес 12 - датчик скорости вращения колеса 13 - переключатель указателя поворота 14 - блок навигации 20 - устройство предупредительной сигнализации.
Реферат
Изобретение относится к устройству контроля вождения транспортного средства. Устройство содержит средство обнаружения бокового объекта, средство управления для приведения в действие управления сдерживанием перемещения в сторону, средство определения начала вхождения в соседнюю полосу движения, средство подавления приведения в действие для подавления приведения в действие управления сдерживанием перемещения в сторону. Перемещение в сторону сопровождается изменением поперечного положения транспортного средства относительно дорожной полосы. Подавление приведения в действие управления сдерживанием перемещения в сторону осуществляют, когда транспортное средство начало вхождение в соседнюю полосу движения и боковой объект обнаружен в соседней полосе движения. Технический результат заключается в предотвращении ненадлежащего вмешательства в управление для сдерживания перемещения транспортного средства в сторону во время смены полосы движения. 21 з.п. ф-лы, 11 ил.
Комментарии