Способ и система для поддерживающего тормозную силу активирования оси свободного хода - RU2397085C1
Код документа: RU2397085C1
Чертежи






Описание
Изобретение относится к способу и системе для поддерживающего тормозную силу активирования оси свободного хода поезда, в частности поездных систем без машинистов или систем AGT (поездов с автоматическим управлением).
В общественном пригородном сообщении, как и в региональном железнодорожном сообщении, все в большей степени используются так называемые AGT-системы, то есть поездные системы без машиниста. В подобных поездах часто происходят процессы торможения, в частности, на станциях, в случае которых поезд должен остановиться в заданной позиции. Так как AGT-системы перевозят людей и к тому же, по меньшей мере, частично не имеют машинистов, тормозная система в подобных поездах должна выполнять особые специфические для безопасности требования.
Для распознавания позиции поезда он располагает так называемой осью свободного хода. Эта ось не испытывает ни торможения, ни ускорения, так что не возникает проскальзывания между размещенным на оси колесом и рельсом, по которому движется поезд. Для определения позиции поезда обороты оси свободного хода отсчитываются исходя из опорной точки.
Тормозная система поезда должна вырабатывать достаточную тормозную силу как в нормальном режиме, так и в экстренном случае.
Необходимая тормозная сила, которая должна вырабатываться тормозной системой поезда, зависит, наряду с имеющимся в распоряжении тормозным путем, от скорости поезда, веса поезда, трения между колесами поезда и рельсом или направляющей, а также от числа снабженных тормозами осей поезда.
На фиг.1 показан поезд Z согласно уровню техники, который движется по рельсу S. Поезд Z состоит из нескольких вагонов W, которые связаны между собой и имеют, по меньшей мере, две поворотные тележки D. На поворотных тележках D размещены, например, четыре оси, на каждой по два колеса. Наряду с торможением осей посредством мотора поезда Z может достигаться дополнительное замедление. В качестве дополнительной тормозной системы для экстренного случая существует возможность дополнительно предусмотреть на поезде магниторельсовый тормоз. Однако магниторельсовый тормоз имеет недостаток, состоящий в том, что его вес относительно велик, и, следовательно, общий вес поезда увеличивается, или максимальное число перевозимых пассажиров снижается. Чем больше затормаживаемых осей имеет поезд Z, тем выше потенциальная тормозная сила поезда. Для определения позиции поезду Z требуется, по меньшей мере, одна ось свободного хода. В случае обычных поездов оси свободного хода не имеют тормоза. Оси свободного хода в конструкции заданы и не предоставляются в распоряжение для процессов торможения.
Поэтому было предложено проводить распознавание позиции поезда не посредством осей свободного хода, а предусмотреть на поезде радиолокационную систему распознавания позиции. Однако обеспечение радиолокационной системы распознавания позиции представляет значительные технические затраты и при определенных обстоятельствах не выполняет критерии безопасности в поездных системах без машинистов.
Поэтому в обычных тормозных системах поездов предусматривается достаточно снабженных тормозами осей, чтобы необходимую тормозную силу выработать даже в ситуации с особенно неблагоприятными условиями. Необходимое число затормаживаемых осей N рассчитывается на минимальное торможение µ между колесами и рельсом S при одновременно высокой скорости V поезда Z и высоком весе G перевозимого груза.
При обычной тормозной системе для поезда Z обычно осуществляется постоянный контроль того, не вышел ли из строя тормоз на оси несвободного хода поезда Z, как показано на фиг.2. Если это имеет место, то поезд Z переходит в аварийный режим. При этом скорость V поезда снижается, и поезд показывает, что он срочным образом требует ремонта. На основе обычного способа действий, показанного на фиг.2, относительно часто имеет место неисправность поезда и нарушение расписания движения.
Поэтому задачей предложенного изобретения является создание способа и системы для торможения поезда, которые надежным образом обеспечивают выработку требуемой тормозной силы и одновременно минимизируют число неисправностей поездов.
Эта задача решается в соответствии с изобретением способом с признаками, приведенными в пункте 1 формулы изобретения.
Изобретение создает способ для поддерживающего тормозную силу активирования оси свободного хода поезда Z, который имеет множество осей,
причем, по меньшей мере, одна ось F свободного хода активируется для определения позиции поезда, а остальные оси N активируются как оси несвободного хода для торможения поезда Z,
причем при отказе одного тормоза, который предусмотрен на оси N несвободного хода, ось, до сих пор являвшаяся осью F свободного хода, активируется как ось N несвободного хода, а ось N несвободного хода, которая имеет вышедший из строя тормоз, активируется как ось F свободного ходжа для определения позиции поезда Z.
В предпочтительной форме выполнения соответствующего изобретению способа при отказе тормоза, ось, до сих пор активированная как ось свободного хода, только тогда активируется как ось несвободного хода, если установлено, что предусмотренный на оси свободного хода тормоз не вышел из строя.
В другой предпочтительной форме выполнения соответствующего изобретению способа вводится аварийный режим поезда, если установлено, что больше не имеется осей свободного хода, у которых тормоз не вышел из строя.
В другой предпочтительной форме выполнения соответствующего изобретению способа оси инициализируются как оси несвободного хода для торможения поезда и как оси свободного хода для определения позиции поезда.
В другой предпочтительной форме выполнения соответствующего изобретению способа при нормальном процессе торможения поезд тормозится путем приведения в действие тормозов осей, активированных как оси несвободного хода.
В предпочтительной форме выполнения соответствующего изобретению способа при процессе экстренного торможения поезд тормозится посредством приведения в действие как тормозов осей, активированных как оси несвободного хода, так и дополнительных тормозов, размещенных на осях, активированных как оси свободного хода.
В другой предпочтительной форме выполнения соответствующего изобретению способа, когда тормоз оси несвободного хода, которая размещена на первой поворотной тележке, выходит из строя, и первая поворотная тележка больше не имеет оси свободного хода, отыскивается вторая поворотная тележка, которая имеет ось свободного хода, причем эта ось свободного хода активируется как ось несвободного хода, а ось несвободного хода первой поворотной тележки активируется как ось свободного хода.
Изобретение также относится к тормозной системе для поезда, который имеет множество осей,
причем, по меньшей мере, одна ось F свободного хода активируется для определения позиции поезда, а остальные оси N активируются как оси несвободного хода для торможения поезда Z,
причем при отказе одного тормоза, который предусмотрен на оси N несвободного хода, ось, до сих пор являвшаяся осью F свободного хода, активируется как ось N несвободного хода, а ось N несвободного хода, которая имеет вышедший из строя тормоз, активируется как ось F свободного хода для определения позиции поезда Z.
В предпочтительной форме выполнения соответствующей изобретению тормозной системы на каждой оси размещены два колеса, которые, соответственно, имеют тормоз для торможения поезда.
В предпочтительной форме выполнения соответствующей изобретению тормозной системы предусмотрено средство управления тормозами, которое управляет размещенными на осях тормозами через управляющие линии.
В предпочтительной форме выполнения соответствующей изобретению тормозной системы размещенные на осях тормоза обеспечивают индикацию, посредством линий индикации, для средства управления торможением их рабочего состояния.
В другой форме выполнения соответствующей изобретению тормозной системы на каждом колесе предусмотрен датчик для определения состояния качения колеса.
В другой форме выполнения соответствующей изобретению тормозной системы средство управления имеет интерфейс, посредством которого все оси могут инициализироваться, соответственно, либо как оси несвободного хода, либо как оси свободного хода.
В последующем описании другие предпочтительные формы выполнения соответствующего изобретению способа и соответствующей изобретению системы описываются со ссылками на приложенные чертежи для пояснения существенных признаков изобретения. На чертежах показано следующее:
Фиг.1 - поезд согласно уровню техники;
Фиг.2 - блок-схема контроля тормозов согласно уровню техники;
Фиг.3 - блок-схема возможной формы выполнения соответствующей изобретению тормозной системы;
Фиг.4А, 4В - таблицы для пояснения способа функционирования соответствующего изобретению способа;
Фиг.5 - блок-схема контроля тормозов в соответствующей изобретению тормозной системе;
Фиг.6 - блок-схема процесса торможения в соответствующей изобретению тормозной системе;
Фиг.7 - блок-схема для пояснения предпочтительной формы выполнения соответствующего изобретению способа.
Как можно видеть на фиг.3, соответствующая изобретению тормозная система имеет средство 1 управления тормозами, которое инициализируется или конфигурируется через интерфейс 2 и содержит, по меньшей мере, одно запоминающее устройство 3. Средство 1 управления тормозами подсоединено к множеству тормозов 4А, 4В, которые соответственно размещены на колесе 5А, 5В оси 6 поезда. Тормоза имеют, соответственно, линию или шину 7, которая указывает средству 1 управления тормозами рабочее состояние или состояние тормоза 4. Кроме того, средство 1 управления тормозами управляет соответственно тормозами 4А, 4В через управляющие линии 8А, 8В, чтобы привести в действие тормоза. Факультативным образом на колесах дополнительно размещены датчики 9А, 9В, которые сообщают средству 1 управления тормозами состояние качения колес по линиям 10А, 10В. В соответствующей изобретению системе предпочтительно все оси 6 поезда сконструированы полностью одинаковыми и имеют, соответственно, на своих колесах тормоза. Во всяком случае, в соответствующей изобретению тормозной системе, по меньшей мере, одна ось поезда активируется или конфигурируется как ось свободного хода для определения позиции поезда, а остальные оси активируются или конфигурируются как оси несвободного хода для торможения поезда. Для конфигурирования оси 6 как оси свободного хода предусмотренные соответствующие тормоза 4А, 4В деактивируются и активируется непоказанный счетчик для отсчета оборотов этой оси. Как только тормоз 4А, 4В, который предусмотрен на оси 6, конфигурированной как ось 6 несвободного хода, выходит из строя, с помощью средства 1 управления тормозами активируется ось, которая до сих пор была осью свободного хода, как ось несвободного хода, а ось, которая до сих пор была осью несвободного хода, тормоз которой вышел из строя, активируется средством 1 управления тормозами как ось свободного хода для определения позиции поезда Z.
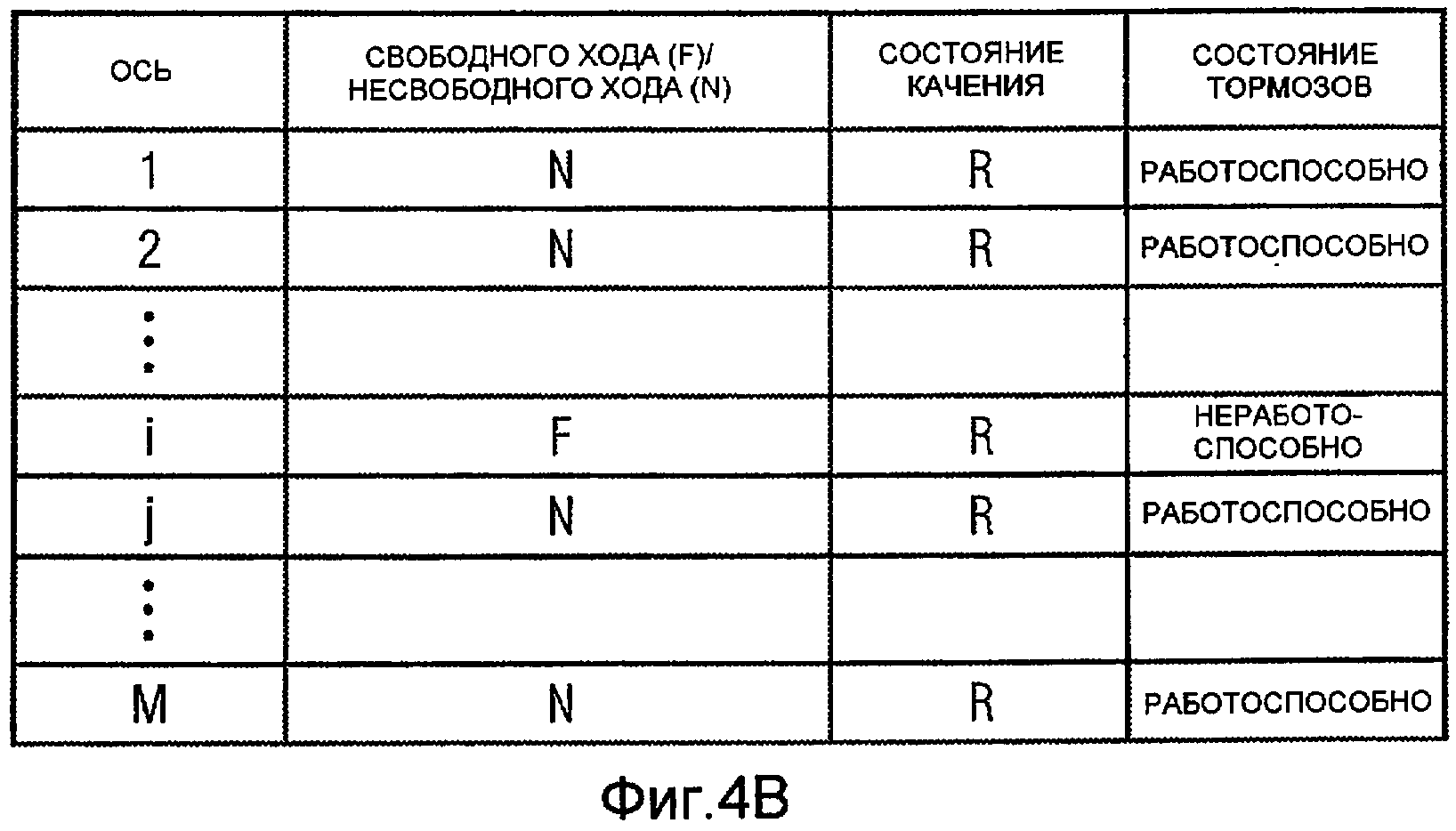
Фиг.4А, 4В показывают содержимое запоминающего устройства 3 при возможной форме выполнения соответствующей изобретению тормозной системы. В показанном примере поезд имеет М осей, причем большая часть осей 6 инициализирована как оси несвободного хода (N), а, по меньшей мере, одна из осей 6 - как ось свободного хода (F). Кроме того, посредством датчиков 9А, 9В контролируется состояние качения колес 5 на осях 6. Средство 1 управления тормозами контролирует, кроме того, посредством линий 7А, 7В состояния тормозов рабочее состояние тормозов 4А, 4В, размещенных на осях 6. После инициализации или конфигурирования при корректном монтаже тормозов состояние торможения всех тормозов является работоспособным. В примере, показанном на фиг.4А, спустя некоторое время работы поезда Z тормоз 4 на оси i, конфигурированной как ось несвободного хода, выходит из строя (состояние «неработоспособно»). В этой ситуации посредством средства 1 управления тормозами ось, которая до сих пор была осью свободного хода и которая была предусмотрена для определения позиции, переконфигурируется в ось несвободного хода. Ось с неработоспособным тормозом, то есть ось i в примере, показанном на фиг.4А, активируется посредством средства 1 управления тормозами как новая ось свободного хода для определения позиции поезда Z, как представлено на фиг.4В. Состояние тормоза переконфигурированной оси i является и далее неработоспособным. В возможной форме выполнения соответствующего изобретению способа ось j, до сих пор являвшаяся осью свободного хода, только тогда переконфигурируется как ось несвободного хода (N) посредством средства 1 управления тормозами, если перед этим установлено, что предусмотренные на оси j свободного хода тормоза также не являются вышедшими из строя. Только если средство 1 управления тормозами устанавливает, что никаких осей свободного хода больше нет, у которых тормоза не вышли из строя, то вводится аварийный режим поезда Z.
Фиг.5 показывает возможную форму выполнения способа, выполняемого в средстве 1 управления тормозами, для контроля и переконфигурирования осей поезда. Как только средство 1 управления тормозами устанавливает на этапе S1, что тормоз оси 6 несвободного хода (N) вышел из строя, то средство 1 управления тормозами проверяет на этапе S2, имеется ли еще ось 6 свободного хода F. Если больше не имеется осей свободного хода, у которых тормоза не вышли из строя, то поезд на этапе S3 переходит в аварийный режим. В аварийном режиме S3, например, центральному пульту управления индицируется отказ тормозов, и скорость поезда Z снижается.
Если средство 1 управления тормозами устанавливает на этапе S2, что еще имеется ось 6 свободного хода (F), то одна из имеющихся осей 6 свободного хода (F) на этапе S4 устанавливается в качестве оси 6 несвободного хода (N), при этом устанавливается соответствующий флаг.
Кроме того, на этапе S5 ось, которая до сих пор была осью 6 несвободного хода (N) с, по меньшей мере, одним вышедшим из строя тормозом 4А, 4В, теперь устанавливается как ось 6 свободного хода (F), при этом устанавливается соответствующий флаг и активируется соответствующий счетчик для отсчета оборотов этой оси.
Фиг.6 показывает блок-схему процесса для представления возможной формы выполнения для осуществления процесса торможения в соответствующей изобретению тормозной системе.
Если на этапе S1 вводится процесс торможения, то сначала на этапе S2 проверяется, идет ли речь об экстренном торможении. Если имеет место экстренное торможение, то на этапе S3 тормозятся все вращающиеся оси, то есть все оси 6 тормозятся независимо от их состояния торможения и независимо от того, конфигурированы ли они как оси свободного хода или оси несвободного хода.
Если нет никакой экстренной ситуации, то на этапе S4 тормозятся только все вращающиеся оси 6, установленные как оси несвободного хода.
Процесс торможения завершается на этапе S5.
Фиг.7 показывает другую форму выполнения для переконфигурирования тормозов в соответствующей изобретению тормозной системе.
В показанной на фиг.7 форме выполнения учитывается, что тормозные оси смонтированы на поворотных тележках D поезда. Сначала на этапе S1 контролируется, не вышел ли из строя тормоз оси несвободного хода, которая размещена на первой поворотной тележке D1. Если тормоз оси несвободного хода на первой поворотной тележке D1 вышел из строя, то на этапе S2 проверяется, действительно ли на первой поворотной тележке D1 больше не имеется оси свободного хода. Если на первой поворотной тележке D1 больше не имеется оси свободного хода, то на следующем этапе S3 отыскивается другая вторая поворотная тележка D2, которая имеет, по меньшей мере, еще одну ось свободного хода. Если подобная поворотная тележка найдена, то ось свободного хода этой второй поворотной тележки D2 переконфигурируется как ось несвободного хода, а ось вышедшей из строя первой поворотной тележки D1 активируется как ось свободного хода для определения позиции поезда.
В возможной форме выполнения соответствующего изобретению способа он встраивается в уже имеющийся механизм защиты от проскальзывания поездной системы. Эта система защиты от проскальзывания распознает, скользит ли или блокировано в данный момент конкретное колесо поезда, так что торможение этого колеса тогда исключается или происходит только в состоянии качения колеса. Система защиты от проскальзывания за счет соответствующего изобретению способа расширяется до поддерживающего тормозную силу активирования оси свободного хода за счет того, что предусматривается дополнительный логический параметр «ось свободного хода». Если этот новый логический параметр установлен на «нет», то система защиты от проскальзывания выполняет свою известную заданную функциональность. Если же этот новый логический параметр установлен на «да», то соответствующий тормоз активируется, только если имеет место экстренное торможение.
С помощью соответствующего изобретению способа можно предпринимать переконфигурирование осей и во время функционирования поезда. Это может в возможной форме выполнения осуществляться также с удаленного центрального средства управления через интерфейс 2 средства 1 управления тормозами.
Соответствующая изобретению тормозная система предоставляет несколько преимуществ. При изготовлении поезда все оси могут обрабатываться одинаково, то есть при конструировании и монтаже не требуется больше проводить различие между осями свободного хода и осями несвободного хода.
Определение конкретной оси как оси свободного хода осуществляется в конце процесса монтажа быстро, просто и надежно посредством конфигурирования средства 1 управления тормозами и интерфейса 2.
Другое преимущество состоит в том, что аварийный режим поезда вводится только тогда, когда исключительным образом больше не имеется никакой оси свободного хода, у которой тормоз работоспособен. Тем самым можно увеличить время работы поезда или сократить время неработоспособного состояния поезда. Косвенным образом за счет этого также снижается число нарушений расписания движения.
Другое преимущество соответствующей изобретению тормозной системы состоит в том, что число предусматриваемых осей минимизируется, так как оси свободного хода в известной степени образуют резерв для отказавшей оси несвободного хода. Тем самым может снижаться вес поезда.
Реферат
Изобретение относится к транспортной технике, в частности к системам поезда с автоматическим управлением. Способ для поддерживающего тормозную силу активирования оси свободного хода поезда заключается в активировании оси (F) свободного хода в качестве оси (N) несвободного хода, а оси (N) несвободного хода в качестве оси (F) свободного хода для определения позиции поезда (Z) в случае отказа одного тормоза (4), который предусмотрен на оси (N) несвободного хода. Тормозная система, реализующая данный способ, содержит множество осей, которые могут инициализироваться, соответственно, как оси (N) несвободного хода или оси (F) свободного хода, средство (1) управления тормозами, которое управляет размещенными на осях (6) тормозами (4А, 4В) через управляющие линии (8А, 8В). Технический результат заключается в обеспечении надежной выработки требуемой тормозной силы и одновременной минимизации числа неисправностей поезда. 2 н. и 10 з.п. ф-лы, 6 ил., 2 табл.
Комментарии