Тормозной кран автомобиля, пневматическая тормозная система, имеющая тормозной кран автомобиля, и способ изготовления тормозного крана автомобиля - RU2735393C2
Код документа: RU2735393C2
Чертежи



Описание
Изобретение касается тормозного крана автомобиля, пневматической тормозной системы, имеющей тормозной кран автомобиля, и способа изготовления или калибровки тормозного крана автомобиля.
У пневматических тормозных систем для автомобилей промышленного назначения известны различные системы для передачи команды торможения, поданной водителем через его тормозную педаль, к колесным тормозам. У аналоговых пневматических тормозных систем с помощью тормозной педали через приводное звено, например, переставляемую тормозной педалью приводную тягу, приводится в действие тормозной кран автомобиля, который подключен к питающему давлению или, соответственно, системному давлению и, в зависимости от нажатия, передает аналоговое управляющее значение тормозного давления через трубопровод для управления тормозным давлением к тормозному контуру. При этом при нажатии тормозной педали непосредственно создается аналоговое тормозное давление, которое затем впоследствии, например, через ускорительные клапаны для увеличения расхода и клапанное устройство АBS (anti-lock braking system, англ. антиблокировочная система тормозов) антиблокировочной системы передается дальше к колесным тормозам. Такие системы отличаются высокой надежностью. Настраиваемое тормозным краном тормозное давление может дополнительно измеряться сенсором давления, чтобы, например, было известно подаваемое на клапанное устройство АBS тормозное давление, создаваемое водителем (предварительное управляющее давление), и могла осуществляться синхронизация запорных клапанов АBS при знании подаваемого тормозного давления создаваемое водителем.
Кроме того, известны системы ассистирования водителю, такие как, например, ACC (automatic cruise control, англ. автоматический круиз-контроль) для регулирования расстояния до одного или нескольких едущих впереди транспортных средств, а также системы для предотвращения или уменьшения тяжести аварий с наездом путем самопроизвольного тормозного воздействия (AEBS (Advanced Emergency Braking System, англ. усовершенствованная система аварийного торможения)), которые, как внешние системы, выдают так называемый внешний сигнал запроса торможения или сигнал XBR (external Brake Request, англ. внешний запрос торможения) устройству управления торможением; но и устройство управления торможением само может выдавать внутренние управляющие сигналы тормозной системы для активирования колесных тормозов, в частности для электронных программ устойчивости с целью предотвращения неустойчивости транспортных средств (ESP (Electronic Stability Program, англ. электронная программа устойчивости), ESC (Electronic Stability Control, англ. электронный контроль устойчивости)) путем самопроизвольных, селективных тормозных воздействий (RSC (Roll Stability Control, контроль устойчивости к опрокидыванию)-торможения). С помощью внешнего сигнала XBR или внутреннего сигнала торможения тормозной системы подается команда торможения надлежащим колесным тормозам, без нажатия водителем тормозной педали. Для такого внешнего торможения (XBR-торможения) или, соответственно, внутреннего RSC-торможения системное давление или питающее давление через подключающее клапанное устройство подключено к тормозному трубопроводу и, например, через клапанное устройство ABS синхронизированным или импульсным образом проведено к колесным тормозам для создания соразмерного тормозного действия. И для таких систем ассистирования водителю или их поддержки со стороны тормозной системы полезно знание тормозного давления, подаваемого при торможениях водителя, чтобы достаточная точность регулирования могла достигаться, в том числе, также при затормаживании, а также при процессах переключения могли предотвращаться резкие переходы от ранее подаваемого тормозного давления, создаваемого водителем.
Наряду с аналоговыми пневматическими тормозными системами известны также электронные пневматические тормозные системы, у которых нажатие тормозной педали сенсируется электрически датчиком тормозного усилия, без передачи при этом, как у тормозного крана, аналогового управляющего значения тормозного давления через подключенный пневматический канал к колесным тормозам. У таких не аналоговых, электронных тормозных систем тормозное действие создается, таким образом, на колесных тормозах непосредственно от системного давления, при этом сигнал сенсора датчика тормозного усилия используется как номинальное замедление или, соответственно, команда тормозного усилия водителя с целью настройки тормозного давления на колесных тормозах. У таких электронных тормозных систем подключение внешних сигналов команды торможения (сигналов XBR) является относительно простым, так как они могут соответствующим образом использоваться как команда торможения водителя для настройки тормозного давления на колесных тормозах. Однако у электронных тормозных систем отчасти в целях безопасности требуется создание пневматического уровня возврата.
DE 10 2012 003 106 B3 описывает способ определения значения тормозного давления по характеристикам, при котором для электрического канала тормозного крана или, соответственно, датчика тормозного усилия предназначен электрический сенсор, с помощью которого, в зависимости от срабатываний датчика тормозного усилия, создаются электрические сигналы, которые выражают произошедшее нажатие. При этом сначала определяется и сохраняется в памяти первая характеристика, в которой представлена зависимость настраиваемых электрическим сенсором электрических сигналов от степени срабатывания датчика тормозного усилия, и потом вторая характеристика, которая представляет зависимость настраиваемого пневматическим каналом значения тормозного давления от электрических сигналов электрического сенсора. При команде торможения при срабатывании датчика тормозного усилия по характеристикам по характеристикам может определяться соответствующее значение тормозного давления.
У такой системы без применения сенсора тормозного давления нажатие тормозной педали может оцениваться по характеристикам, сохраненным в памяти в устройстве управления торможением, как команда характерного тормозного давления для настройки соответствующего торможения. Благодаря отказу от сенсора тормозного давления для определения предварительного давления ABS могут экономиться затраты при, тем не менее, высокой надежности.
В основе изобретения лежит задача создать тормозной кран автомобиля для пневматической тормозной системы, такую пневматическую тормозную систему и способ изготовления тормозного крана автомобиля, которые позволят выполнить надежную пневматическую тормозную систему при низких затратах на изготовление или, соответственно, техническое обслуживание.
Эта задача решается с помощью тормозного крана автомобиля, пневматического тормозного крана, имеющего тормозной кран автомобиля, и способа изготовления тормозного крана автомобиля по независимым пунктам формулы изобретения. Зависимые пункты описывают предпочтительные усовершенствования.
При этом уже в тормозном кране в памяти сохранена характеристика, на основе которой возможна оценка или, соответственно, преобразование нажатия тормозной педали уже с помощью устройства обнаружения тормозного крана. Механическое нажатие тормозной педали водителем начинается при этом предпочтительно путем перестановки приводного звена, напр., приводной тяги, которая измеряется сенсором, создающим, в зависимости от нажатия, электрический сигнал нажатия. Этот сенсор может, например, представлять собой сенсор перемещений или, соответственно, сенсор Холла, который создает электрический сигнал нажатия, воспроизводящий путь перестановки приводного звена.
Однако обнаруженный таким непосредственным образом сигнал нажатия не выдается непосредственно как сигнал сенсора устройству управления торможением, а обрабатывается или, соответственно, преобразуется посредством устройства обнаружения и указанной по меньшей мере одной сохраненной в памяти характеристики, причем эта характеристика содержит обнаруженную ранее при калибровке зависимость давления тормозного крана. При этом может выдаваться сигнал сенсора, который учитывает характерное поведение именно этого тормозного крана, напр., жесткости его пружин, фактические пропускные поперечные сечения для сжатого воздуха в зависимости от нажатия и т.д.
При этом характеристика определяется предпочтительно уже при изготовлении тормозного крана, когда в калибровочном устройстве приводное звено или, соответственно, актуатор калибровочного устройства совершает различные пути перестановки, при этом к входу сжатого воздуха тормозного крана подключается пневматическое системное давление, и измеряется аналоговое значение давления, настраиваемое тормозным краном при разных путях перестановки, на его пневматическом канале. При этом сначала получается характеристика давление-путь перестановки или, соответственно, характеристика давление-сигнал нажатия, которая воспроизводит или, соответственно, содержит характеристику давления тормозного крана. Затем эти данные или, соответственно, найденная из этих измерений характеристика сохраняются в запоминающем устройстве тормозного крана как характеристика, которая при этом индивидуальным или, соответственно, характерным образом воспроизводит характеристику этого тормозного крана.
Конструктивно одинаковые тормозные краны в связи с технологическими допусками могут также иметь различные характеристики или, соответственно, характеристики давление-путь перестановки, причем эти характеристики, в частности, могут быть сдвинуты друг относительно друга, что может приводить к заметным отклонениям в более крутых областях характеристик. Когда уже в тормозном кране используется свойство калиброванной характеристики, при этом может выдаваться электрический сигнал сенсора, являющийся единым и стандартизированным. При этом замена тормозных кранов возможна без дополнительных издержек. Возможна также замена тормозного крана на конструктивно похожее устройство с таким же образом произведенной калибровкой.
При этом тормозной кран представляет собой узел, который активируется тормозной педалью или, соотв., приводной тягой тормозной педали и в зависимости от нажатия, во-первых, проводит подключенное системное давление, напр., ресивера сжатого воздуха или, соответственно, питающего ресивера, в качестве аналогового тормозного давления, создаваемого водителем, а во-вторых, выдает электрический сигнал сенсора, который воспринимается устройством управления торможением. При этом от тормозного крана отходят аналоговый пневматический канал и электрический канал, при этом электрический сигнал может передаваться устройству управления торможением, напр., через шину данных (CAN-шину) внутри транспортного средства или внутри тормозной системы, или, напр., в виде широтно-импульсно модулированного электрического сигнала.
Иначе, чем в примере в DE 10 2012 003 106 B3, характеристика сохраняется в памяти не в устройстве управления торможением или, соответственно, подключенном блоке памяти, а уже в тормозном кране, который пневматически и электрически подключается в пневматической тормозной системе. При этом достигается преимущество более высокой вариабельности и возможности замены отдельных компонентов; также различные, принципиально конструктивно похожие тормозные краны могут применяться непосредственно в тормозной системе, без необходимости сначала соответственно программировать для этого, например, запоминающее устройство устройства управления.
Калибровка может осуществляться, в частности, еще во время производства или, соответственно, в конце производства тормозного крана во время финального контроля герметичности и функций. Тормозной кран в любом случае проверяется при конечном контроле, например, на герметичность и характеристику давления, при этом он своим входом сжатого воздуха подключается к системному давлению, и проверяется герметичность его входа сжатого воздуха и выхода сжатого воздуха. После этого или во время этой проверки может осуществляться калибровка, при этом с помощью, например, актуатора совершается ряд движений нажатия (путей перестановки), и сенсором давления определяется выданное на выходе давления, настраиваемое значение аналогового пневматического давления. При этом осуществляется ориентированная на давление калибровка тормозного крана при низких издержках, индивидуальным и характерным для тормозного крана образом, внутреннее запоминающее устройство которого впоследствии может программироваться данными характеристик для позднейшего преобразования.
По одному из вариантов осуществления создается возможность редундантного измерения, при этом тормозной кран имеет два предусмотренных независимо друг от друга и выполняющих измерения сенсора перемещений, каждый из которых отдельно измеряют путь перестановки приводного звена, при этом их сигналы нажатия могут обрабатываться на основе их индивидуальных характеристик, так что выдаются два сигнала сенсоров, то есть тормозной кран имеет два электрических канала к устройству управления торможением. При этом также при выходе из строя или неисправностях электрического канала или, соответственно, какого-либо сенсора другим сенсором и другим электрическим каналом создается редундантность, без необходимости, например, сенсора давления.
В соответствии с изобретением при этом может также достигаться высокая точность отводимого, вызываемого водителем выходного давления крана.
Далее изобретение поясняется подробнее с помощью прилагаемых чертежей на некоторых вариантах осуществления. Показано:
фиг.1: электропневматическая схема соединений пневматической тормозной системы по одному из вариантов осуществления;
фиг.2: увеличенное изображение тормозного крана с фиг.1;
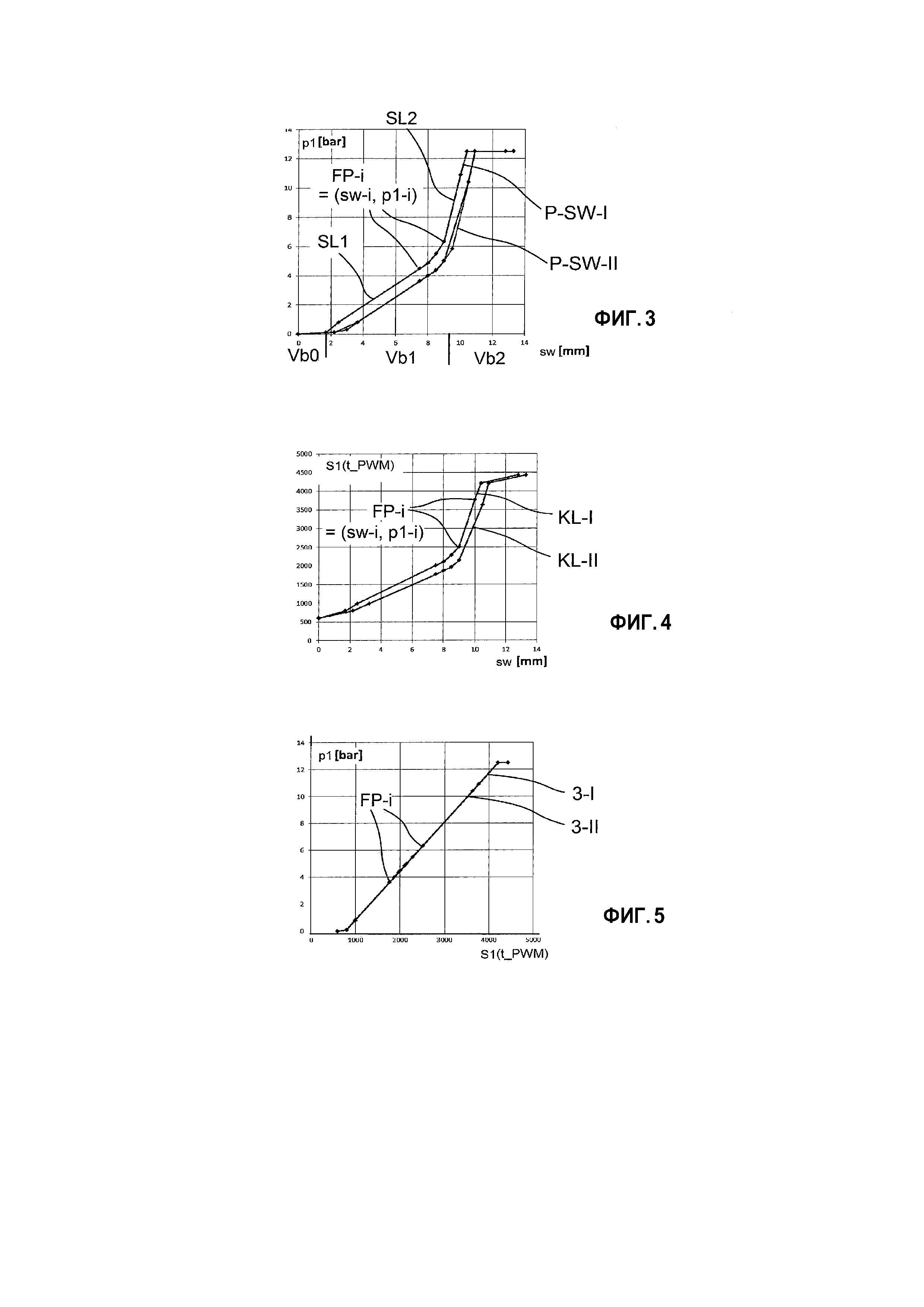
фиг.3: график настраиваемого тормозного давления двух тормозных кранов одинаковой конструкции в тормозной системе фиг.1, в зависимости от пути нажатия тормозной педали;
фиг.4: графики электрических выходных сигналов двух тормозных кранов в зависимости от пути нажатия;
фиг.5: график, содержащий выведенные из фиг.2 и 3 зависимости тормозного давления от электрических сигналов сенсоров двух тормозных кранов с фиг.2 и 3;
фиг.6: система для калибровки тормозного крана с фиг.2;
фиг.7: блок-схема способа калибровки по одному из вариантов осуществления изобретения.
Пневматическая тормозная система 1 автомобиля 7 промышленного назначения показана на фиг.1 тормозным контуром 22; всего предусмотрены несколько тормозных контуров 22. Водитель нажимает тормозную педаль 2 и вместе с тем тормозной кран 3, который вбирает сжатый воздух, имеющий системное давление p0, из первого питающего ресивера 4 сжатого воздуха через свой вход 3a сжатого воздуха и через свой выход 3b сжатого воздуха проводит в трубопровод 5 для управления тормозным давлением. При этом в зависимости от нажатия тормозной педали 2 с помощью тормозного крана 3 в трубопровод 5 для управления тормозным давлением подается аналоговое тормозное давление p1, создаваемое водителем. Это аналоговое тормозное давление p1, создаваемое водителем, в соответствии с показанным вариантом осуществления через открытое в основном положении подключающее клапанное устройство 10, которое выполнено здесь в виде единственного подключающего клапана 10, а именно, в виде 3/2-ходового соленоидного клапана, подается к тормозному контуру 22. Подключающий клапан 10 служит для выборочного подключения функции ассистирования водителю в зависимости от внешнего сигнала XBR команды торможения или, напр., внутреннего сигнала RSC команды торможения, как описывается ниже.
В тормозном контуре 22 предусмотрено клапанное устройство 13 ABS, имеющее впускной клапан ABS и выпускной клапан ABS, к которым затем подключается тормозной трубопровод 16 вместе с предусмотренным на колесе 15 транспортного средства колесным тормозом 14.
Устройство 8 управления торможением (устройство управления ABS) воспринимает сигналы n частоты вращения колес на сенсорах 17 частоты вращения колес, предусмотренных на колесах 15 транспортного средства, и выдает управляющие сигналы S2 и S3 как управляющие сигналы ABS клапанному устройству 13 ABS для регулирования скольжения при торможении, с известными фазами поддержания, понижения или повышения тормозного давления p16 в тормозном трубопроводе 16, как это, собственно, известно.
Тормозной кран 3 имеет, таким образом, трубопровод 5 управления тормозным давлением в качестве пневматического выходного канала; кроме того, тормозной кран 3 в качестве электрического выходного канала имеет полезный сигнал S1 сенсора, который выдается тормозным краном 3 устройству управления 8 торможением. Для этого тормозной кран 3, в соответствии с увеличенным местным видом фиг.2, имеет в качестве приводного элемента или приводного звена переставляемую тормозной педалью 2 на путь sw перестановки приводную тягу 6, с помощью которой, собственно известным образом устанавливается, например, пропускное поперечное сечение 33 тормозного крана 3 для выдачи аналогового тормозного давления p1, создаваемого водителем, в трубопровод 5 для управления тормозным давлением. На приводной тяге 6 расположен сенсор 18 перемещений, напр., сенсор Холла, для сенсирования пути sw перестановки.
Сенсор 18 перемещений, в зависимости от пути sw перестановки, создает сигнал S5 нажатия и выдает его устройству 20 обнаружения, которое на основе сохраненной в памяти 21 тормозного крана 3 характеристики KL образует из сигнала S5 нажатия полезный сигнал S1 сенсора, который, напр., представляет собой ШИМ- (широтно-импульсно модулированный) сигнал или информационное содержание на CAN-шине, и выдается устройству 8 управления торможением.
Устройство 8 управления торможением из полезного сигнала S1 сенсора находит непосредственно тормозное давление p1, создаваемое водителем.
Тормозное давление p1, создаваемое водителем, при открытом подключающем клапане 10 и открытом впускном клапане 11 клапанного устройства 13 ABS может непосредственно направляться к колесному тормозу 14. Кроме того, не показанным здесь, но известным образом, могут быть предусмотрены дополнительные клапанные устройства, например, для распределения нагрузки на ось (клапанное устройство ALB (Anti Lock Brake system, англ. система антиблокировки колес при торможении)).
Внешним устройством 30 управления для ассистирования водителю может, например, через CAN-шину выдаваться внешний сигнал XBR команды торможения устройству 8 управления торможением, после чего оно выдает сигнал S4 подключения для переключения переключающего клапана 10, который, напр., присоединяет питающий ресивер 4 сжатого воздуха или же другой питающий ресивер сжатого воздуха, имеющий системное давление p0, через трубопровод 29 снабжения с тормозным контуром 22, имеющим клапанное устройство 13 ABS. Устройство 8 управления торможением с помощью управляющих сигналов S2, S3 синхронизирует клапанное устройство 13 ABS таким образом, что в тормозном трубопроводе 16 к колесному тормозу 14 из системного давления p0 устанавливается аналоговое рабочее тормозное давление p16, которое должно устанавливаться для функции ассистирования водителю.
Точное знание настраиваемого водителем аналогового тормозного давления p1, создаваемого водителем, в трубопроводе 5 для управления торможением важно, в частности, для регулирования ABS, а также для инициирования такого не зависящего от водителя внешнего (XBR) или не зависящего от водителя внутреннего (RSC) торможения, так как тормозная система использует для достижения точной реализации желаемого торможения взаимосвязь между настройкой давления и реакцией водителя (замедление) уже при затормаживании, которая может выводиться из торможений водителя, и затем происходит переключение подключающего клапана 10 между тормозным давлением p1, создаваемым водителем, и системным давлением p0, и поэтому могут иметь место значительные разности давления. Поэтому устройство 8 управления торможением должно было бы учитывать имеющееся тормозное давление p1, создаваемое водителем, так как иначе при переключении могут возникать тормозные воздействия в виде рывков, которые могут приводить к неустойчивым состояниям транспортного средства 7. Для этого устройство 8 управления торможением воспринимает полезный сигнал S1 сенсора от тормозного крана 3.
Ниже обнаружение и переработка сигнала S5 нажатия в полезный сигнал S1 сенсора и применение в устройстве 8 управления торможением поясняется более детально со ссылкой на графики фиг.3, 4 и 5, на каждом из которых показаны характеристики двух в принципе конструктивно одинаковых, но вследствие технологических допусков несколько различных тормозных кранов 3, т.е. первого тормозного крана 3-I и второго тормозного крана 3-II; соответственно данные характеристики обозначены -I и -II.
На фиг.3 показано тормозное давление p1, создаваемое водителем, например, в барах, в зависимости от отображаемого сигналом S5 нажатия пути sw перестановки, напр., в мм. Получается характеристика давление-путь P-SW, которая показана для двух тормозных кранов как P-SW-I и P-SW-II.
В тормозном кране 3 приводная тяга 6, например, через пружинное устройство 32, имеющее две пружины 32a, 32b с различной характеристикой пружины, приводит в действие заслонку крана для открытия пропускного поперечного сечения. Благодаря этому характерному пружинному исполнению задается характеристика открытия, как так называемая «кривая чувствительности», в которой небольшие нажатия и вместе с тем пути sw перестановки в начальной области Vb0 перестановки sw0-sw1 сначала еще не приводят к открытию заслонки крана, то есть имеется тормозное давление p1=0, создаваемое водителем. В ближайшей следующей первой области Vb1 перестановки становится релевантной первая жесткость первой пружины 32a как, напр., более низкий первый подъем SL1, а затем во второй области Vb2 перестановки от sw1 до sw2 вторая жесткость SL2 второй пружины 32b как второй подъем.
Таким образом становится возможным сначала постепенное повышение давления, а затем, при более сильном нажатии, более заметное повышение давления. Такие кривые чувствительности вызывают у водителя приятное ощущение.
Для определения показанных на фиг.3 характеристик P-SW давление-путь здесь предусмотрены фиксированные точки Fp-i, где i=1, 2, 3…, как пары значений из значения p1 давления и значения пути sw перестановки, между которыми тогда интерполируется кривая. Фиксированные точки Fp-i служат для задания характеристических областей характеристики.
Фиксированная точка Fp-1 имеет здесь сначала координату sw=0 и вместе с тем p1=0, соответственно отсутствию нажатия педали.
Следующая фиксированная точка Fp-2 может, например, иметь координату пути sw-2 нажатия, при котором осуществляется первый подъем давления, причем здесь, например, имеется давление p1, меньше/равное 0,1 бар. В точке Fp-3, например, при пути sw-3 перестановки, имеется давление p1=0,8 бар; затем при переходе линейных отрезков характеристик пружин назначаются несколько фиксированных точек, так что характеристика P-SW давление-путь образуется ходом линии или ходом участка из нескольких отрезков, причем здесь, например, между Fp-2 и Fp-3 задан более длинный прямой отрезок, затем переход и между Fp-6 и Fp-7 другой прямой отрезок второй пружины. При Fp-9 уже достигнуто полное срабатывание тормоза, так что дальнейшее нажатие до Fp-10 не приводит к дальнейшему повышению тормозного давления p1, создаваемого водителем. Тогда при Fp-10 достигнуто максимальное нажатие тормозной педали 2, то есть тормозная педаль 2 полностью нажата.
При этом характеристика P-SW давление-путь может быть, например, определена как набор фиксированных точек Fp-i, соответственно в виде пар (p, sw) значений.
На фиг.4 показана используемая устройством 20 обнаружения характеристика KL крана, т.е. снова две характеристики KL-I и KL-II кранов для двух конструктивно одинаковых тормозных кранов 3. Характеристика KL крана может быть сохранена в запоминающем устройстве 21; но в принципе, в запоминающем устройстве 21 может сохраняться и характеристика P-SW давление-путь, так что устройство 20 обнаружения на их основе обнаруживает полезный сигнал S1 сенсора; релевантно, что устройство 20 обнаружения создает и выдает полезный сигнал S1 сенсора.
При этом в соответствии с фиг.4 также для полезного сигнала S1 сенсора, который выдается в виде ШИМ-сигнала, имеющего ширину t_PWM сигнала, или через CAN-шину, определяется зависимость от отображаемого сигналом S5 нажатия пути sw перестановки, которая представляет собой характеристику KL крана. При этом характеристика KL крана может сохраняться в запоминающем устройстве 21.
Таким образом, при нажатии тормозной педали 2 в тормозном кране 3 сначала сенсором 18 перемещений создается сигнал S5 нажатия, из которого затем устройством 20 обнаружения на основе сохраненной в памяти характеристики KL (или P-SW) находится полезный сигнал S1 сенсора и выдается устройству 8 управления торможением.
При этом в соответствии с фиг.5 полезный сигнал S1 сенсора показывает для двух тормозных кранов 3-I и 3-II линейную зависимость, причем функции p1(S1) в соответствии с фиг.5 также совпадают, т.е. идентичны, даже когда фиксированные точки характеристик P-SW-I, P-SW-II и соответственно KL-I и KL-II разные. Таким образом, с помощью устройства 8 управления торможением для каждого применяемого тормозного крана 3 может использоваться единый, идентичный полезный сигнал S1 сенсора; при этом характерные допуски и несходства в соответствии с изобретением могут учитываться и компенсироваться сохраненными в памяти характеристиками уже в тормозном кране 3. Также замена тормозного крана 3, без перепрограммирования устройства 8 управления торможением, не приводит к изменению режима торможения.
Характеристика KL или P-SW в соответствии с фиг.6 определяется к калибровочном процессе или, соответственно, способом калибровки, который выполняется уже при изготовлении тормозного крана 3, в частности в конце линии при окончательном контроле. При окончательном контроле тормозные краны 3 сначала обычным образом подвергаются контролю на герметичность и т.д., для чего они в соответствии с фиг.6 своим входом 3a сжатого воздуха подключаются к питающему давлению p0, а к их выходу 3b сжатого воздуха подключается сенсор 52 давления. Кроме того, для калибровки применяется актуатор 50, соответствующий приводной тяге 6, который переставляется определенным образом, при этом воспринимается создаваемый сенсором 18 перемещений сигнал S5 нажатия. При этом путь sw перестановки сигнала нажатия S5 проходит через фиксированные точки Fp1-Fp10 фиг.1, и с помощью сенсора 52 давления измеряется проводимое тормозное давление p1, сознанное водителем.
При этом может непосредственно определяться характеристика P-SW давление-путь или характеристика KL крана и непреходящим образом сохраняться в запоминающем устройстве 21. Таким образом осуществляется калибровка, ориентированная на давление.
По одному из усовершенствований два сенсора 18 перемещений могут быть предусмотрены в одном тормозном кране 3 для создания редундантности. При этом фиг.3, 4, 5 могут также оцениваться в том отношении, что обе характеристики P-SW-I, P-SW-II давление-путь или, соответственно, обе характеристики KL-I и KL-II крана могут представлять соответственно два одинаково калиброванных сенсора 18-I и 18-II перемещений, которые предусмотрены в одном единственном тормозном кране 3 и в соответствии с фиг.5 обеспечивают редундантность, т.е. одинаковые результаты измерений. При этом в калибровочном процессе замеры двух сенсоров 18-I и 18-II перемещений могут осуществляться одновременно или, соответственно, параллельно, так что также гарантировано, что их характеристики будут калиброваны при точно одинаковых значениях тормозного давления p1, создаваемого водителем, настройка которого должна осуществляться позднее.
При этом в процессе изготовления фиг.7 после начала на этапе St0 затем в соответствии с этапом St1 питающий ресивер 4 или, соответственно, системное давление p0 подключается к входу 3a сжатого воздуха, а к выходу 3b сжатого воздуха подключается сенсор 52 давления; этот этап может быть частью предшествующего контроля герметичности.
Затем на этапе St2 активируется актуатор 50, и устанавливаются разные пути sw перестановки, которые измеряются в каждом случае как сигнал S5 нажатия, при последовательной перестановке соответственно фиксированным точкам Fp1-Fp10. При этом на этапе St3, одновременно с этапом St2, на каждом из установленных путей sw-1-sw-10 перестановки сенсором 52 давления измеряется соответствующее значение p1-1-p1-10 давления, при этом устройство управления измерительного устройства воспринимает эти значения и затем на этапе St4 составляет характеристику KL или P-SW, например, как набор значений фиксированных точек Fp-i, и сохраняет в запоминающем устройстве 21.
Таким образом, калибровочный процесс осуществляется на этапе St1-St4 однократно при изготовлении и калибровке тормозного крана 3. Впоследствии он может, в принципе, осуществляться повторно; однако это не требуется. При этом после изготовления при эксплуатации при нажатии тормозной педали 2
- в соответствии с этапом St5, во-первых, проводится аналоговое тормозное давление p1, создаваемое водителем, и, кроме того, определяется путь sw перестановки как сигнал S5 нажатия;
- в соответствии с этапом St6 устройством 20 обнаружения на основе характеристики KL или P-SW и пути sw перестановки определяется полезный сигнал S1 сенсора;
- на этапе St7 полезный сигнал S1 сенсора выдается устройству 8 управления торможением;
- при этом устройство 8 управления торможением затем на этапе St8 из полезного сигнала S1 сенсора может непосредственно и линейно извлекать тормозное давление p1, создаваемое водителем, и использовать для выдачи управляющих сигналов S2, S3 и при необх. S4.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 Пневматическая тормозная система
2 Тормозная педаль
3 Тормозной кран автомобиля
3a Вход сжатого воздуха
3b Выход сжатого воздуха
4 Первый питающий ресивер сжатого воздуха
5 Трубопровод для управления тормозным давлением
6 Приводная тяга тормозной педали 2
7 Транспортное средство, в частности автомобиль промышленного назначения
8 Устройство управления торможением (устройство управления тормозной системы)
10 Подключающий клапан
11, 12 Запорные клапаны ABS
11 Впускной клапан ABS
12 Выпускной клапан ABS
13 Клапанное устройство ABS, имеющее впускной клапан 11 ABS и выпускной клапан 12 ABS
14 Колесный тормоз
15 Колесо транспортного средства
16 Тормозной трубопровод
17 Сенсор частоты вращения колес
18 Сенсор перемещений
20 Устройство обнаружения
21 Память характеристик
22 Тормозной контур
28 Ускорительный клапан
29 Трубопровод снабжения
30 Внешнее устройство управления для ассистирования водителю
32 Пружинное устройство в тормозном кране 3 автомобиля
32a Первая пружина
32b Вторая пружина
33 Пропускное поперечное сечение
50 Актуатор
52 Сенсор давления
n Сигнал частоты вращения колес
p0 Системное давление
p1 аналоговое тормозное давление, создаваемое водителем, в трубопроводе 5 для управления торможением
p1-i Значения тормозного давления, создаваемого водителем
p16 Аналоговое рабочее тормозное давление в тормозном трубопроводе 16
S1 Полезный сигнал сенсора
S2, S3 Управляющие сигналы запорным клапанам 11, 12 ABS
S4 Сигнал подключения
S5 Сигнал нажатия
sw Путь перестановки
sw-i Значения пути перестановки
Fp-i Фиксированные точки как набор чисел из sw-i, p1-i
P-SW Характеристика давление-путь
P-SW-I Первая характеристика давление-путь
P-SW-II Вторая характеристика давление-путь
KL Характеристика тормозного крана
KL-I Первая характеристика тормозного крана
KL-II Вторая характеристика тормозного крана
Vb0 Начальная область перестановки
Vb1 Первая область перестановки
Vb2 Вторая область перестановки
SL1 Первая жесткость пружины как первый подъем
SL2 Вторая жесткость пружины как второй подъем
ШИМ Широтно-импульсная модуляция
XBR внешний сигнал команды торможения (eXternal Brake Request)
RSC внутренний, не зависящий от водителя сигнал команды торможения (Roll Stability Control)
St0-St18 Этапы способа, при этом
St1-St4 этапы способа калибровки
St5-St8 этапы способа торможения
Реферат
Изобретение касается тормозного крана (3) автомобиля для пневматической тормозной системы автомобиля промышленного назначения, при этом тормозной кран (3) автомобиля выполнен с возможностью активирования тормозной педалью, например, через приводную тягу (6) и предусмотрен для выдачи аналогового тормозного давления (p1), создаваемого водителем, и электрического полезного сигнала (S1) сенсора в зависимости от нажатия тормозной педали (2), при этом тормозной кран (3) автомобиля имеет вход (3a) сжатого воздуха для подключения к системному давлению (p0), выход (3b) сжатого воздуха для подключения трубопровода (5) управления торможением и сенсор (18) для обнаружения нажатия тормозной педали (2). При этом предусмотрено, что тормозной кран (3) имеет устройство (21) для запоминания характеристик, содержащее сохраненные в памяти данные (KL) характеристик, и устройство (20) обнаружения; сенсор (18) выполнен для создания сигнала (S5) нажатия в зависимости от нажатия тормозной педали (2); и устройство (20) обнаружения выполнено для создания полезного сигнала (S1) сенсора из сигнала (S5) нажатия в зависимости от данных (KL) характеристик, сохраненных в памяти (21) характеристик. Изобретение позволяет выполнить надежную пневматическую тормозную систему при низких затратах на изготовление и техническое обслуживание. 3 н. и 10 з.п. ф-лы, 7 ил.
Комментарии