Способ активизации по меньшей мере одной вторичной функции системы защиты пассажиров транспортного средства - RU2748525C2
Код документа: RU2748525C2
Чертежи
Описание
Изобретение относится к способу активизации по меньшей мере одной вторичной функции системы защиты пассажиров транспортного средства (к пассажирам также относится водитель транспортного средства) в соответствии с родовым понятием независимого пункта 1 формулы изобретения. Кроме того, изобретение относится к устройству, выполненному с возможностью осуществления предлагаемого в изобретении способа активизации по меньшей мере одной вторичной функции системы защиты пассажиров транспортного средства, и к компьютерной программе для осуществления шагов способа активизации по меньшей мере одной вторичной функции системы защиты пассажиров транспортного средства.
Из уровня техники известны различные системы для распознавания опрокидывания транспортных средств, которые можно разделить на два вида. В них используются подходы, основанные на измерении мгновенных угловых скоростей для приведения в действие критичных по времени срабатывания первичных функций системы защиты пассажиров, таких как приведение в действие надувных подушек безопасности, приведение в действие удерживающих устройств и т.д. Подходы, основанные на измерении ускорений, используются, как правило, для рационального в стоимостном отношении воплощения и отработки некритичных по времени срабатывания вторичных функций такой системы защиты пассажиров, таких, например, как отправка экстренного вызова, разблокирование дверей транспортного средства, отключение подачи топлива и т.д. Известные из уровня техники подходы, основанные на измерении ускорений, преследуют, прежде всего, цель распознавания устойчивого пространственного положения транспортного средства, лежащего на боку или крыше после его опрокидывания. Кроме того, на основании вертикального ускорения можно распознавать отрыв транспортного средства от земли, что позволяет таким образом получать грубую оценку ситуации на предмет опрокидывания транспортного средства. В этой связи в ситуациях воздействия на транспортное средство нагрузок может быть получен ложноположительный результат распознавания опрокидывания и может быть отправлен экстренный вызов, хотя на самом деле опрокидывания не произошло. Кроме того, в системах, в которых распознанное опрокидывание, помимо совершения экстренного вызова, приводит к отключению подачи топлива, ложное распознавание опрокидывания может оказать на транспортное средство более серьезное влияние. Кроме того, основанные на измерении ускорений подходы, предназначенные для распознавания устойчивого окончательного положения транспортного средства, могут не обеспечивать правильного распознавания опрокидывания транспортного средства с переворотом на 360°.
Из публикации DE 102008004307 А1, например, известен способ регистрации пространственного положения транспортного средства. Согласно этому способу анализируют данные от по меньшей мере одного датчика угловых ускорений и датчика ускорений для распознавания того, находится ли транспортное средство в опрокинутом на крышу положении, причем при обнаружении опрокинутого на крышу положения транспортного средства происходит автоматическое разблокирование дверей транспортного средства.
Из публикации DE 102008040295 А1 известен способ распознавания нахождения транспортного средства в опрокинутом на бок и/или на крышу положении, аналогичный предлагаемому в изобретении способу. Известный способ включает следующие шаги: прием через интерфейс поперечного и/или вертикального показателя, причем поперечный показатель представляет поперечное ускорение и/или вертикальный показатель представляет вертикальное ускорение; распознавание опрокинутого на крышу положения транспортного средства, если вертикальный показатель или производный от него показатель пространственного положения по меньшей мере в одной своей компоненте по абсолютному значению превышает заданное вертикальное пороговое значение, и/или распознавание опрокинутого на бок положения транспортного средства, если показатель пространственного положения, производный от вертикального показателя и поперечного показателя, находится в области опрокинутых на бок положений пространства состояний, причем пространство состояний заключено между осями, определяющими поперечное и вертикальное ускорение. Кроме того, нахождение транспортного средства в положении стоя распознают, если показатель пространственного положения, хотя и побывал в области опрокинутых на бок положений, но по истечении заданного времени пребывания в опрокинутом на бок положении уже не находится в этой области, и/или если показатель пространственного положения, хотя и принимал по меньшей мере в одной компоненте значение, превышающее заданное вертикальное пороговое значение, но по истечении заданного времени пребывания в опрокинутом на крышу положении по меньшей мере одна его компонента приняла значение, уже не превышающее вышеупомянутое вертикальное пороговое значение. Затем в зависимости от распознанного положения транспортного средства могут активизироваться функции безопасности, такие, например, как открытие замков дверей, включение освещения салона транспортного средства и/или остановка двигателя.
Раскрытие изобретения
Способ активизации по меньшей мере одной вторичной функции системы защиты пассажиров транспортного средства, охарактеризованный признаками независимого пункта 1 формулы, имеет то преимущество, что он позволяет распознавать опрокидывание транспортного средства, после которого транспортное средство не остается в окончательном положении лежа на крыше или на боку, а могло перевернуться на 360°, используя подход, основанный только на измерении ускорений. Это дает возможность реализовать эффективные в стоимостном отношении решения по распознаванию опрокидываний для активизации некритичных по времени срабатывания вторичных функций системы защиты пассажиров транспортного средства, таких как отправка экстренного вызова, разблокирование дверей и/или отключение подачи топлива для минимизации опасности возникновения пожара.
Настоящее изобретение в различных вариантах его осуществления способно обеспечивать надежное и уверенное распознавание быстро происходящих опрокидываний с переворотом на 360°. В основу изобретения положено то обстоятельство, что в процессе опрокидывания с переворотом на 360° транспортное средство в различные моменты времени ударяется о землю. В результате сигналы ускорений в поперечном и вертикальном направлениях приобретают характерные формы, которые могут использоваться для проверки правдоподобности ситуации. Благодаря распознаванию опрокинутого на бок и/или на крышу положения, в которых транспортное средство оказывается, прежде чем приземлиться своими колесами, можно также надежно распознавать медленные переворачивания транспортного средства на 360°. Благодаря этому существует возможность достижения высокой степени распознавания опрокидываний с переворотом на 360° в рамках надежного общего решения. Сущность изобретения основывается на оценке характерных форм кривых сигналов ускорений в поперечном и вертикальном направлениях во время опрокидывания с переворотом на 360°, сопровождающегося контактом транспортного средства с землей. Кроме того, при использовании такого подхода к активизации по меньшей мере одной вторичной функции системы защиты пассажиров транспортного средства также могут приводить долгие фазы свободного полета, во время которых транспортное средство успевает перевернуться на 360° без промежуточного контакта с землей и которые завершаются жестким ударом транспортного средства о землю колесами.
Одним из объектов настоящего изобретения является способ активизации по меньшей мере одной вторичной функции системы защиты пассажиров транспортного средства. При осуществлении предлагаемого в изобретении способа регистрируют и оценивают (анализируют) вертикальное ускорение в вертикальном направлении транспортного средства и поперечное ускорение в поперечном направлении транспортного средства. На основании вертикального ускорения либо производной от него величины и первого поперечного ускорения либо производной от него величины определяют текущее пространственное положение транспортного средства. При этом распознают отрыв транспортного средства от земли, если вертикальное ускорение либо производная от него величина выполняет заданный первый критерий. Удар транспортного средства о землю колесами распознают, если вертикальное ускорение либо производная от него величина выполняет заданный второй критерий. Кроме того, определяют первый временной промежуток между распознанным отрывом транспортного средства от земли и распознанным ударом транспортного средства о землю колесами. По меньшей мере одну вторичную функцию системы защиты пассажиров транспортного средства активизируют, если в течение первого временного промежутка вертикальное ускорение либо производная от него величина выполняет третий критерий, представляющий удар транспортного средства о землю крышей, и/или поперечное ускорение либо производная от него величина выполняет четвертый критерий, представляющий удар транспортного средства о землю боком, или если первый временной промежуток превышает заданное время, а распознанный удар транспортного средства о землю колесами выполняет заданный пятый критерий, представляющий жесткий удар о землю с последующим наступлением состояния покоя
Под состоянием покоя в контексте изобретения понимается состояние транспортного средства, в котором транспортное средство не движется или движется лишь с малой постоянной скоростью. Состояние покоя может наступить, когда транспортное средство еще не полностью прекратило движение. Состояние покоя по существу указывает на то, что после произошедшего опрокидывания с переворотом на 360° дальнейшего еще одного опрокидывания или переворота (капотирования) транспортного средства не ожидается.
Также предлагается устройство, выполненное с возможностью осуществления способа активизации по меньшей мере одной вторичной функции системы защиты пассажиров транспортного средства. Предлагаемое в изобретении устройство содержит первый датчик, способный регистрировать вертикальное ускорение в вертикальном направлении транспортного средства, второй датчик, способный регистрировать поперечное ускорение в поперечном направлении транспортного средства, и блок обработки данных и управления, способный принимать и оценивать зарегистрированное вертикальное ускорение и зарегистрированное поперечное ускорение и на основании вертикального ускорения и первого поперечного ускорения определять текущее пространственное положение транспортного средства.
Еще одним объектом изобретения является компьютерная программа для осуществления шагов способа активизации по меньшей мере одной вторичной функции системы защиты пассажиров транспортного средства при выполнении компьютерной программы в системе обработки данных.
Под блоком обработки данных и управления в контексте изобретения понимается электрический прибор, такой, например, как блок управления, в частности блок управления надувными подушками безопасности, обрабатывающий и оценивающий данные, регистрируемые датчиками. Блок обработки данных и управления может иметь по меньшей мере один интерфейс, который может быть построен на аппаратном и/или программном уровне, т.е. реализован аппаратными и/или программными средствами. В случае аппаратной реализации интерфейсы могут быть частью, например, так называемых системных специализированных (заказных) интегральных схем (ASIC), включающей в себя самые разные функции блока обработки данных и управления. Вместе с тем, возможно также выполнение интерфейсов в виде самостоятельных интегральных схем или выполнение интерфейсов, по меньшей мере частично, из дискретных компонентов. В случае программной реализации интерфейсы могут представлять собой программные модули, содержащиеся, например, в микроконтроллере наряду с другими программными модулями. Целесообразно также выполнение в виде компьютерного программного продукта с программным кодом, хранящимся на машиночитаемом носителе данных, таком как полупроводниковый носитель данных, дисковый накопитель или оптический накопитель, и используемым для осуществления оценки данных при выполнении программы блоком обработки данных и управления.
Приведенные в зависимых пунктах формулы изобретения мероприятия и усовершенствования представляют собой предпочтительные варианты осуществления заявленного в независимом пункте 1 способа активизации по меньшей мере одной вторичной функции системы защиты пассажиров транспортного средства и предпочтительные варианты выполнения заявленного в независимом пункте 10 устройства для осуществления способа.
Особенно целесообразен вариант, в котором также регистрируют и оценивают продольное ускорение в продольном направлении транспортного средства. Это позволяет проверять правдоподобность результата распознавания жесткого удара транспортного средства о землю колесами.
В целесообразном варианте осуществления способа первый критерий может считаться выполненным, если вертикальное ускорение либо производная от него величина превышает заданное первое пороговое значение. Об отрыве транспортного средства от земли в принципе можно говорить, если вертикальное ускорение в области нижних частот находится ниже отрицательного порога. Выполнение первого критерия распознают путем оценки вертикального ускорения. Для этого сигнал можно пропускать через соответствующий фильтр нижних частот с последующим сравнением значения сигнала с первым пороговым значением. При превышении первого порогового значения, например, может быть запущен счетчик, который останавливают при распознавании удара транспортного средства о землю колесами. Если это состояние длится достаточно долго, и показание счетчика превышает заданный порог, может быть распознан отрыв транспортного средства от земли. В оторванном от земли состоянии транспортного средства, т.е. в состоянии его свободного полета, значение зарегистрированного вертикального ускорения, как правило, соответствует отрицательному значению, которое должно компенсировать значение ускорения свободного падения. Поэтому первое пороговое значение имеет отрицательный знак. Кроме того, второй критерий может считаться выполненным, если вертикальное ускорение либо производная от него величина превышает заданное второе пороговое значение. При этом второе пороговое значение соответствует значению ускорения, имеющему другой знак по сравнению с первым пороговым значением ускорения.
В еще одном целесообразном варианте осуществления способа третий критерий может считаться выполненным и может быть распознан удар транспортного средства о землю крышей, если вертикальное ускорение либо производная от него величина превышает заданное третье пороговое значение. Третье пороговое значение имеет другой знак по сравнению со вторым пороговым значением, поскольку направление действия ускорения, возникающего при ударе о землю крышей, противоположно направлению действия ускорения, возникающего при ударе о землю колесами. Если третий критерий выполнен, это можно запомнить или сохранить на заданный период времени. Четвертый критерий может считаться выполненным и может быть распознан удар транспортного средства о землю боком, если поперечное ускорение либо производная от него величина превышает заданное четвертое пороговое значение или заданное пятое пороговое значение. При этом четвертое пороговое значение и пятое пороговое значение имеют разные знаки, поскольку направление действия ускорения, возникающего при ударе транспортного средства о землю правым боком, противоположно направлению действия ускорения, возникающего при ударе транспортного средства о землю левым боком. Если был распознан контакт транспортного средства боком с землей или удар транспортного средства о землю боком, это можно запомнить или сохранить на заданный период времени.
В еще одном целесообразном варианте осуществления способа пятый критерий может считаться выполненным, если при распознанном ударе транспортного средства о землю колесами в течение заданного второго временного промежутка вертикальное ускорение либо производная от него величина превышает заданное шестое пороговое значение, а поперечное ускорение либо производная от него величина превышает заданное седьмое пороговое значение, и по истечении заданного второго временного промежутка вертикальное ускорение либо производная от него величина и поперечное ускорение либо производная от него величина не показывают дальнейших активных изменений состояния (активностей). Отрыв от земли может происходить и без вращения транспортного средства - в результате подпрыгивания последнего, поэтому жесткость удара транспортного средства о землю колесами оценивают для принятия решения о том, показана ли в данном случае активизация по меньшей мере одной вторичной функции. Жесткий удар о землю распознают тогда, когда вертикальное ускорение принимает характерное высокое значение, после чего в течение второго временного промежутка уменьшается до нуля. Одновременно такой жесткий удар транспортного средства о землю колесами из-за порождаемых им сотрясений также приводит к колебательным выбросам поперечного ускорения в течение второго временного промежутка. Выполнение пятого критерия, т.е. распознавание жесткого удара транспортного средства о землю колесами, можно проверять на правдоподобность путем оценки продольного ускорения. Выполнение пятого критерия может расцениваться как правдоподобное, если при распознанном ударе транспортного средства о землю колесами продольное ускорение либо производная от него величина в течение заданного второго временного промежутка превышает заданное восьмое пороговое значение. Состояние покоя после удара транспортного средства о землю колесами распознают за счет того, что сигналы ускорения в продольном, поперечном и вертикальном направлениях не показывают дальнейших активных изменений состояния.
В еще одном целесообразном варианте осуществления способа по меньшей мере одна вторичная функция может включать в себя функцию отправки экстренного вызова и/или функцию разблокирования дверей и/или функцию отключения подачи топлива.
В еще одном целесообразном варианте осуществления способа зарегистрированные ускорения перед их оценкой можно пропускать через фильтр.
В предпочтительном варианте своего выполнения предлагаемое в изобретении устройство может содержать третий датчик, способный регистрировать продольное ускорение в продольном направлении транспортного средства, причем блок обработки данных и управления может быть способен принимать и оценивать продольное ускорение. Кроме того, для фильтрации зарегистрированных ускорений может использоваться по меньшей мере один фильтр нижних частот.
Ниже подробнее рассматриваются примеры выполнения изобретения, поясняемые чертежами. На чертежах одинаковыми номерами обозначены компоненты или элементы, выполняющие одинаковые или аналогичные функции.
Краткое описание чертежей
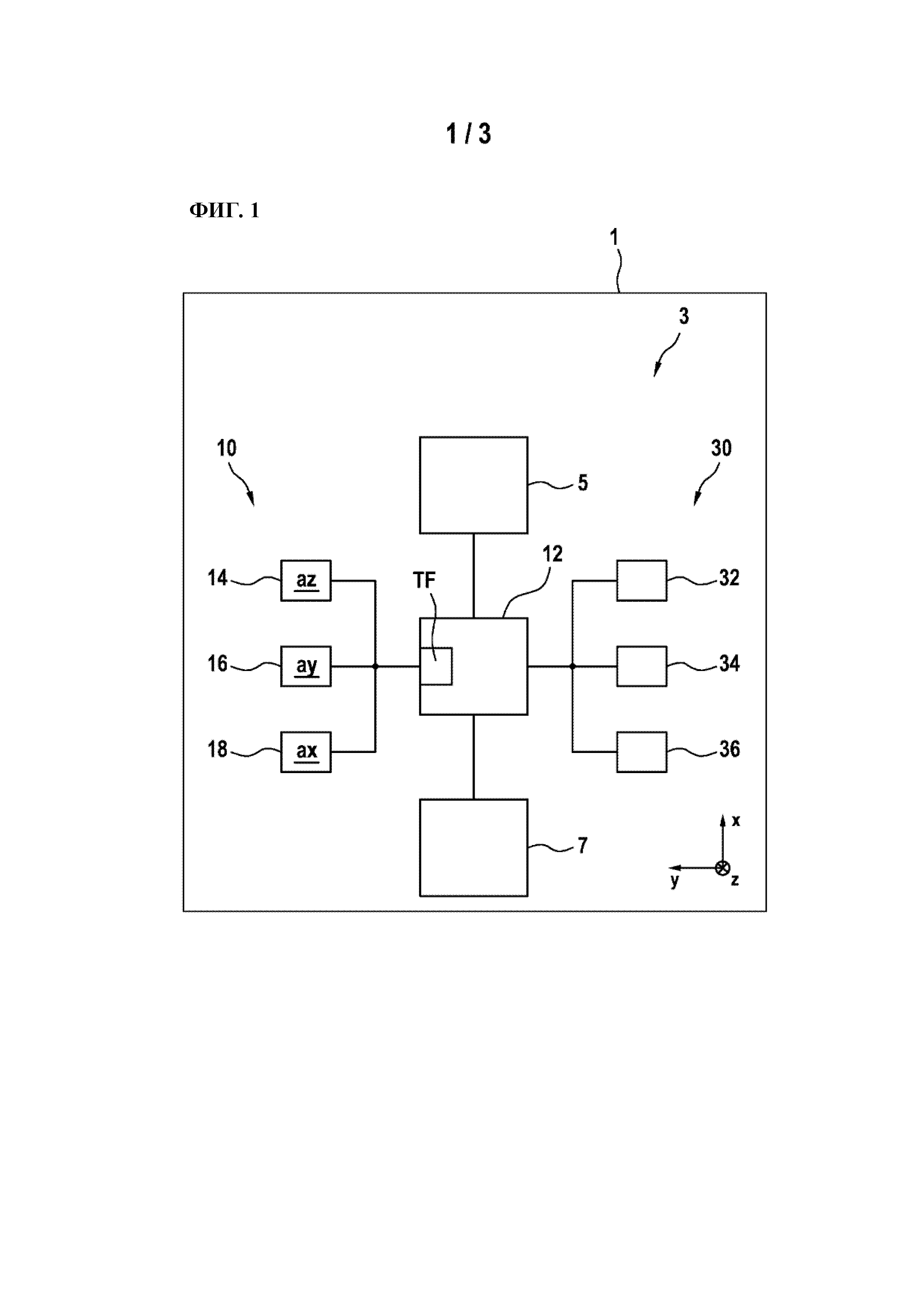
На фиг. 1 приведена структурная схема транспортного средства с устройством для осуществления предлагаемого в изобретении способа активизации по меньшей мере одной вторичной функции системы защиты пассажиров транспортного средства в одном примере выполнения указанного устройства.
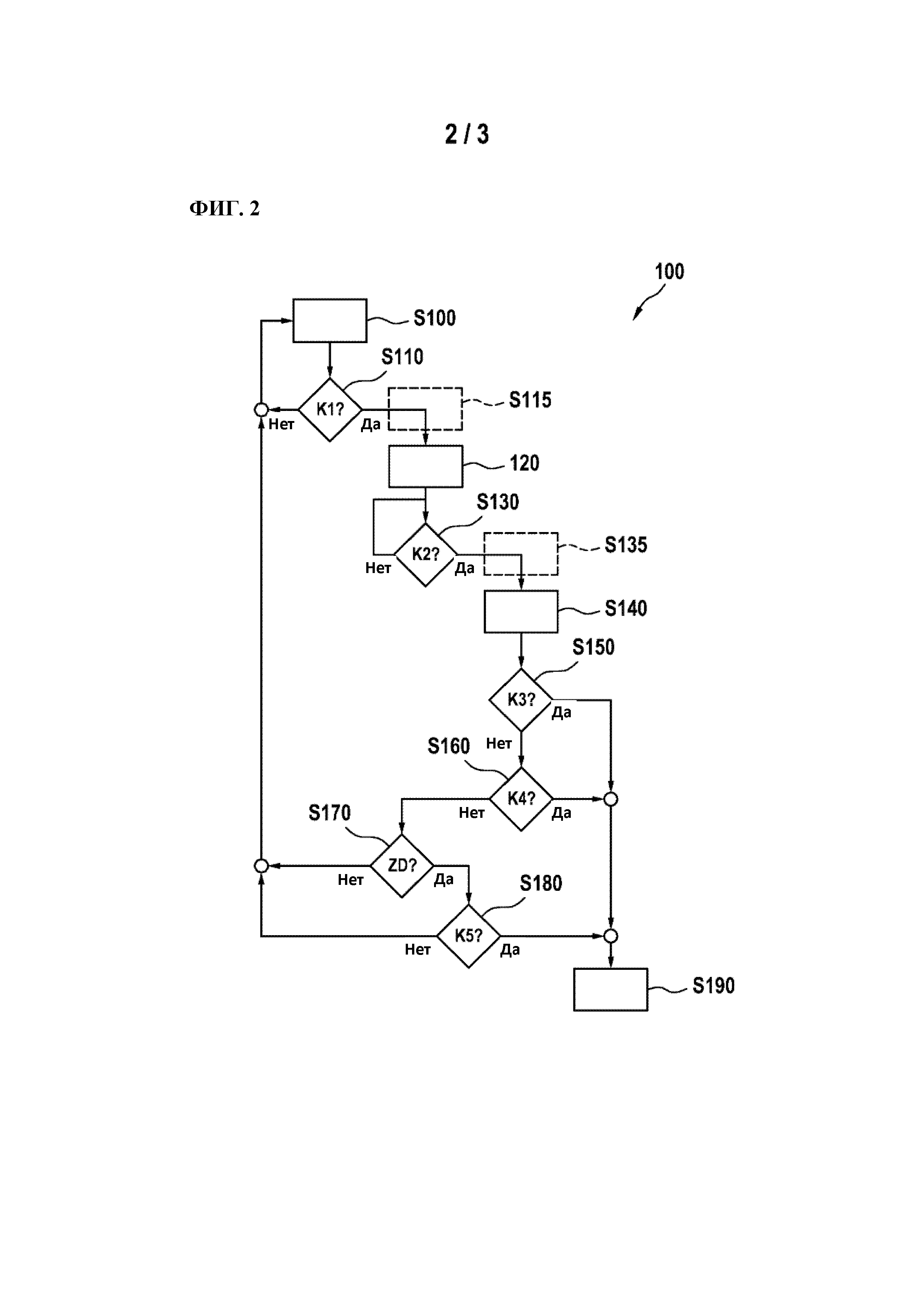
На фиг. 2 приведена блок-схема предлагаемого в изобретении способа активизации по меньшей мере одной вторичной функции системы защиты пассажиров транспортного средства в одном примере осуществления указанного способа.
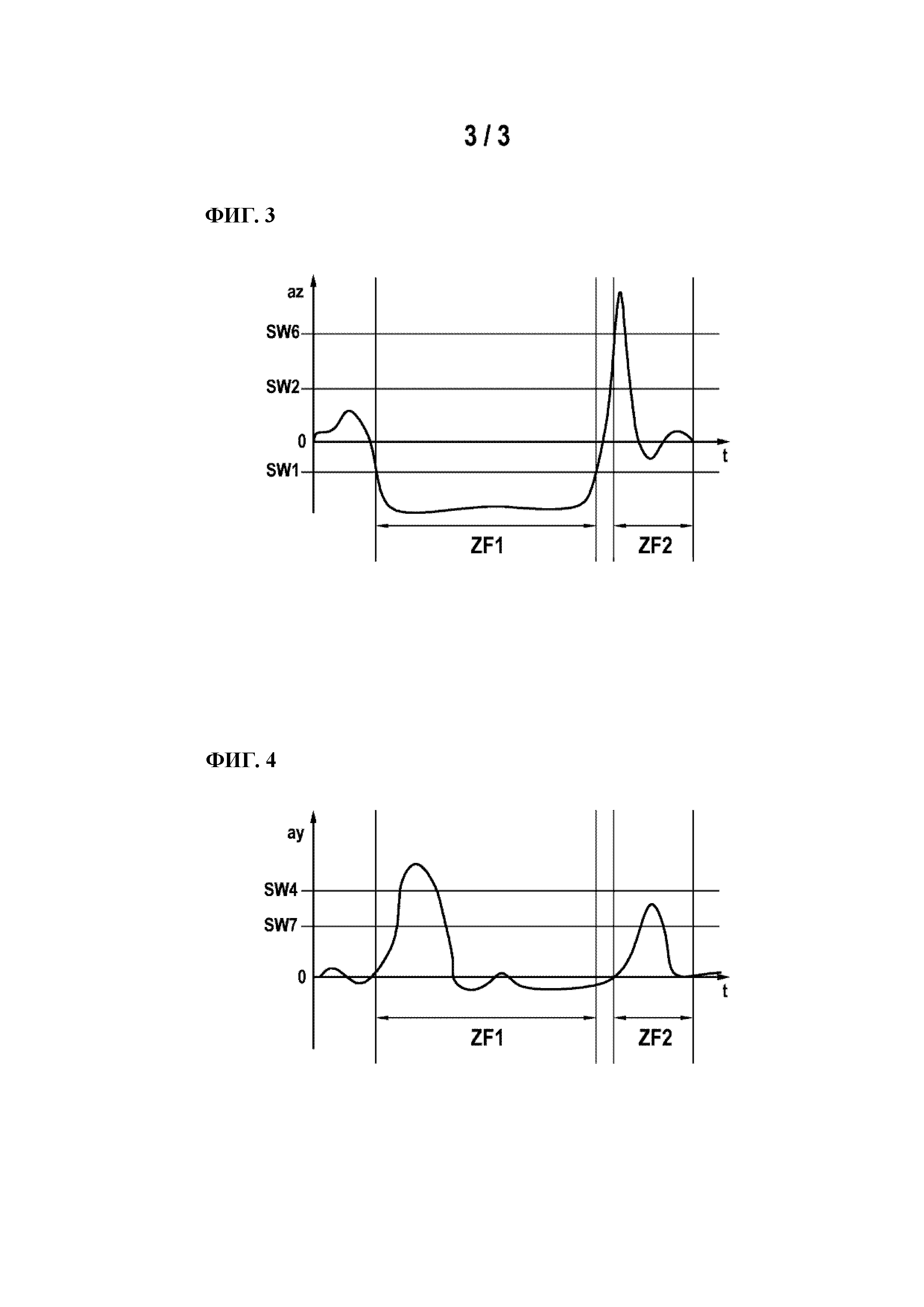
На фиг. 3 приведена диаграмма с кривой изменения во времени сигнала вертикального ускорения транспортного средства.
На фиг. 4 приведена диаграмма с кривой изменения во времени сигнала поперечного ускорения транспортного средства.
Варианты осуществления изобретения
Как показано на фиг. 1, транспортное средство 1 в рассматриваемом примере осуществления изобретения содержит систему 3 защиты пассажиров, включающую в себя удерживающую систему 5, систему 7 надувных подушек безопасности и пример выполнения предлагаемого в изобретении устройства 10 содержит. Устройство 10 выполнено с возможностью осуществления представленного на фиг. 2 способа 100 активизации по меньшей мере одной вторичной функции 30 системы 3 защиты пассажиров транспортного средства 1 и содержит первый датчик 14, регистрирующий вертикальное ускорение az в вертикальном направлении z транспортного средства, второй датчик 16, регистрирующий поперечное ускорение ay в поперечном направлении y транспортного средства, и блок 12 обработки данных и управления, принимающий и оценивающий зарегистрированное вертикальное ускорение az и зарегистрированное поперечное ускорение ay и на основании вертикального ускорения az и первого поперечного ускорения ay определяющий текущее пространственное положение транспортного средства 1.
Кроме того, в рассматриваемом примере устройство 10 содержит третий датчик 18, регистрирующий продольное ускорение ax в продольном направлении х транспортного средства. Блок 12 обработки данных и управления принимает и оценивает продольное ускорение ax. Кроме того, в рассматриваемом примере блок 12 обработки данных и управления использует фильтр TF нижних частот, фильтрующий зарегистрированные ускорения ax, ay, az.
Как показано на фиг. 2-4, при осуществлении способа 100 активизации по меньшей мере одной вторичной функции 30 системы 3 защиты пассажиров транспортного средства 1 на шаге S100 регистрируют и оценивают вертикальное ускорение az в вертикальном направлении z транспортного средства. На шаге S110 проверяют, выполняет ли вертикальное ускорение az либо производная от него величина заданный первый критерий K1, представляющий отрыв транспортного средства 1 от земли. Если первый критерий K1 не выполнен, осуществление способа возвращается назад к шагу S100. Если на шаге S110 распознан отрыв транспортного средства 1 от земли, то на шаге S120 регистрируют и оценивают поперечное ускорение ay в поперечном направлении y транспортного средства. На шаге S130 проверяют, выполняет ли вертикальное ускорение az либо производная от него величина заданный второй критерий K2, представляющий удар транспортного средства 1 о землю колесами. Эту проверку продолжают до тех пор, пока не будет выполнен второй критерий и не будет распознан удар транспортного средства 1 о землю колесами. На шаге S140 определяют первый временной промежуток ZF1 между распознанным отрывом транспортного средства 1 от земли и распознанным ударом транспортного средства 1 о землю колесами. Для облегчения определения первого временного промежутка ZF1 после шага S110 и распознанного отрыва транспортного средства 1 от земли на факультативном шаге S115, показанном прерывистой линией, может быть запущен счетчик или секундомер. После шага S130 и распознанного удара транспортного средства 1 о землю колесами на факультативном шаге S135, показанном прерывистой линией, счетчик или секундомер может быть остановлен. Затем на шаге S140 может быть считано показание счетчика, представляющее первый временной промежуток ZF1. Затем на шаге S150 проверяют, выполнен ли в течение первого временного промежутка ZF1 вертикальным ускорением az либо производной от него величиной третий критерий K3, представляющий удар транспортного средства 1 о землю крышей. Если на шаге S150 распознан такой удар транспортного средства 1 о землю крышей, то на шаге S190 активизируют по меньшей мере одну вторичную функцию 30 системы защиты пассажиров транспортного средства. Если на шаге S150 удар о землю крышей не распознан, то на шаге S160 проверяют, выполнен ли поперечным ускорением ay либо производной от него величиной четвертый критерий K4, представляющий удар транспортного средства 1 о землю боком. Если на шаге S160 распознан такой удар транспортного средства 1 о землю боком, то на шаге S190 активизируют по меньшей мере одну вторичную функцию 30 системы защиты пассажиров транспортного средства. Если на шаге S160 удар о землю боком не распознан, то на шаге S170 проверяют, превышает ли первый временной промежуток ZF1 заданное время ZD. Если на шаге S170 превышения времени ZD не установлено, то осуществление способа возвращается назад к шагу S100. Если на шаге S170 установлено превышение времени ZD, то на шаге S180 проверяют, выполняет ли распознанный удар транспортного средства 1 о землю колесами заданный пятый критерий K5, представляющий жесткий удар о землю с последующим наступлением состояния покоя. Если на шаге S180 жесткий удар о землю с последующим наступлением для транспортного средства 1 состояния покоя не распознан, то осуществление способа возвращается назад к шагу S100. Если на шаге S180 распознан жесткий удар о землю с последующим наступлением для транспортного средства 1 состояния покоя, то на шаге S190 активизируют по меньшей мере одну вторичную функцию 30 системы защиты пассажиров транспортного средства.
Нахождение транспортного средства в состоянии покоя можно устанавливать, с одной стороны, по зарегистрированной скорости (vX) транспортного средства. Скорость транспортного средства обычно является одним из параметров транспортного средства, передаваемых по коммуникационной шине транспортного средства, например по шине CAN.
Еще одна возможность установления того, что транспортное средство находится в состоянии покоя, позволяющая обходиться без учета скорости (vX) транспортного средства, заключается в оценке сигналов ускорения в направлениях X, Y и Z (сигналов aX, aY, aZ). Если эти значения ускорения принимают характерные значения, транспортное средство приняло свое окончательное положение на колесах, т.е. находится в положении/состоянии покоя. Эти характерные значения могут определяться пороговыми значениями ускорений или отношениями ускорений друг к другу. Например, тем, что значения ускорения в направлениях X и Y принимают значения около 0 g, а ускорение в направлении Z - значение около 1 g. Кроме того, можно оценивать значения угловых скоростей, которые в этом случае также принимают значения около 0°/с. Для надежного распознавания состояния покоя эти значения должны сохраняться в течение заданного времени.
Кроме того, оценка скорости (vX) транспортного средства может использоваться для уточнения результата оценки, основанной на значениях ускорения, а возможно и угловой скорости, или проверки правдоподобности этого результата.
В рассматриваемом примере осуществления изобретения по меньшей мере одна вторичная функция 30 системы защиты пассажиров транспортного средства включает в себя функцию 32 отправки экстренного вызова, функцию 34 разблокирования дверей и функцию 36 отключения подачи топлива. Разумеется, могут быть предусмотрены и другие некритичные по времени срабатывания вторичные функции, такие, например, как включение освещения салона и т.д. кроме того, может быть предусмотрена только функция 32 отправки экстренного вызова, или функция 34 разблокирования дверей, или функция 36 отключения подачи топлива.
Помимо поперечного ускорения на шаге S120 также можно регистрировать и оценивать продольное ускорение ax в продольном направлении х транспортного средства. Кроме того, можно пропускать зарегистрированные ускорения ax, ay, az через фильтр и оценивать отфильтрованные значения ускорения в дополнение к значениям ускорений ax, ay, az или вместо них.
В рассматриваемом примере осуществления изобретения первый критерий K1 считают на шаге S110 выполненным, если вертикальное ускорение az либо производная от него величина превышает заданное первое пороговое значение SW1. Второй критерий K2 считают на шаге S130 выполненным, если вертикальное ускорение az либо производная от него величина превышает заданное второе пороговое значение SW2.
В рассматриваемом примере осуществления изобретения третий критерий K3 считают на шаге S150 выполненным и распознают удар транспортного средства 1 о землю крышей, если вертикальное ускорение az либо производная от него величина превышает заданное третье пороговое значение, на чертежах не показанное. При ударе транспортного средства 1 о землю крышей вертикальное ускорение az, пропущенное через фильтр нижних частот, имеет высокое отрицательное значение, которое сравнивают с третьим пороговым значением. Физически удар о землю крышей длится определенное время. Вертикальное ускорение az можно отличить от пиков сигнала, обусловленных кратковременными возмущениями, за счет того, что оно находится выше третьего порогового значения в течение определенного периода времени. Как только третий критерий K3 выполнен, удар о землю крышей квалифицируют как таковой и сохраняют в памяти.
В рассматриваемом примере осуществления изобретения четвертый критерий K4 считают на шаге S160 выполненным и распознают удар транспортного средства 1 о землю боком, если поперечное ускорение ay либо производная от него величина превышает заданное четвертое пороговое значение SW4 или заданное пятое пороговое значение, на чертежах не показанное. Удар транспортного средства 1 о землю боком проявляется сильным ускорением в поперечном направлении y. В случае удара боком распознавание такого удара можно выполнять с использованием поперечного ускорения ay, также пропущенного через фильтр нижних частот. Отфильтрованное поперечное ускорение ay сравнивают с четвертым пороговым значением SW4. Дополнительно для распознавания удара транспортного средства 1 о землю боком можно также оценивать пропущенное через фильтр нижних частот вертикальное ускорение az, которое при ударе транспортного средства 1 о землю боком имеет отрицательное значение.
В рассматриваемом примере осуществления изобретения пятый критерий K5 считают на шаге S180 выполненным, если при распознанном ударе транспортного средства 1 о землю колесами в течение заданного второго временного промежутка ZF2 вертикальное ускорение az либо производная от него величина превышает заданное шестое пороговое значение SW6, а поперечное ускорение ay либо производная от него величина превышает заданное седьмое пороговое значение SW7, и по истечении заданного второго временного промежутка ZF2 вертикальное ускорение az либо производная от него величина и поперечное ускорение ay либо производная от него величина не показывают дальнейших активных изменений состояния.
На фиг. 3 и 4 схематически показаны кривые изменения вертикального ускорения az и поперечного ускорения ay во время опрокидывания с переворотом на 360°, сопровождающегося ударом транспортного средства 1 о землю боком в течение первого временного промежутка ZF1. Как показано на фиг. 4, поперечное ускорение ay либо производная от него величина в течение первого временного промежутка ZF1 превышает заданное четвертое пороговое значение SW4. В последней фазе опрокидывания транспортное средство 1 падает с жестким ударом о землю своими колесами. Из-за этого вертикальное ускорение az на фиг. 3 показывает характерно высокое положительное значение, которое оказывается выше шестого порогового значения SW6, а затем уменьшается до нуля. Кроме того, жесткий удар транспортного средства 1 о землю колесами приводит к выбросу поперечного ускорения ay на фиг. 4, которое оказывается выше седьмого порогового значения SW7. После удара о землю транспортное средство 1 по истечении второго временного промежутка ZF2 достигает стационарного окончательного состояния. Поэтому вертикальное ускорение az и поперечное ускорение ay не показывают дальнейших активных изменений состояния.
Выполнение пятого критерия K5 дополнительно можно проверить на правдоподобность на шаге S180 путем оценки продольного ускорения ax. При этом выполнение пятого критерия K5 считают правдоподобным, если при распознанном ударе транспортного средства 1 о землю колесами продольное ускорение ax либо производная от него величина в течение заданного второго временного промежутка ZF2 превышает заданное восьмое пороговое значение, на чертежах не показанное, и по истечении заданного второго временного промежутка ZF2 не показывает дальнейших активных изменений состояния.
Этот способ может быть реализован, например, в блоке управления, например, программными или аппаратными средствами или в смешанной программно-аппаратной форме. В этом случае соответствующая компьютерная программа для осуществления шагов способа 100 активизации по меньшей мере одной вторичной функции 30 системы 3 защиты пассажиров может выполняться в таком блоке управления как системе обработки данных.
Реферат
При активизации вторичной функции системы защиты пассажиров транспортного средства, определяют текущее пространственное положение транспортного средства. Распознают отрыв транспортного средства от земли и удар транспортного средства о землю колесами. Определяют первый временной промежуток (ZF1) между распознанным отрывом и ударом о землю колесами и активизируют вторичную функцию, если в течение первого временного промежутка (ZF1) вертикальное ускорение (az) либо производная от него величина выполняет третий критерий (K3), представляющий удар транспортного средства о землю крышей, и/или поперечное ускорение (ay) либо производная от него величина выполняет четвертый критерий (K4), представляющий удар транспортного средства о землю боком, или если первый временной промежуток (ZF1) превышает заданное время (ZD), а распознанный удар транспортного средства о землю колесами выполняет заданный пятый критерий (K5), представляющий жесткий удар о землю с последующим наступлением состояния покоя. Предложены также устройство осуществления способа и машиночитаемый носитель. Достигается надежное и уверенное распознавание быстро происходящих опрокидываний с переворотом на 360 градусов. 3 н. и 11 з.п. ф-лы, 4 ил.

Комментарии