Устройство для подъема и перемещения расположенного на опорной поверхности груза - RU2060188C1
Код документа: RU2060188C1
Чертежи




Описание
Изобретение относится к устройствам для подъема и перемещения расположенного на опорной поверхности груза.
Известно устройство для подъема и перемещения расположенного на опорной поверхности груза, содержащее вал, на котором смонтирован с возможностью вращения относительно него по меньшей мере один ролик, средства зацепления для соединения с грузом и тяговый элемент.
Недостатками известного устройства является сложность конструкции и ненадежность в эксплуатации.
Техническим результатом изобретения является упрощение конструкции и повышение надежности в эксплуатации.
Технический результат достигается тем, что устройство для подъема и перемещения расположенного на опорной поверхности груза, содержащее вал, на котором смонтирован с возможностью вращения относительно него по меньшей мере, один ролик, средства зацепления для соединения с грузом, и тяговый элемент, снабжено соединительным средством, установленным на упомянутом валу над осью вращения ролика и соединенным с тяговым элементом, представляющим собой гибкую тягу, каждое средство зацепления снабжено штырем и кулачком, а на концах вала установлены дополнительные кулачки и выполнены отверстия, геометрическая ось каждого из которых параллельна геометрической оси вращения ролика, при этом каждый штырь установлен с возможностью взаимодействия с соответствующим отверстием для соединения средства зацепления с валом и подъема конца груза с опорной поверхности, а каждый кулачок установлен с возможностью взаимодействия с соответствующим дополнительным кулачком для фиксации средства зацепления от дальнейшего вращения относительно вала.
Кроме того, каждое средство зацепления снабжено вертикальной пластиной, взаимодействующей с торцовой поверхностью груза.
Кроме того, каждое средство зацепления снабжено стержнем, взаимодействующем с приемным отверстием на грузе.
Кроме того, каждое средство зацепления снабжено дополнительным штырем, на котором выполнена канавка для взаимодействия с выступом, выполненным на валу для блокирования аксиального перемещения упомянутого штыря относительно соответствующего отверстия.
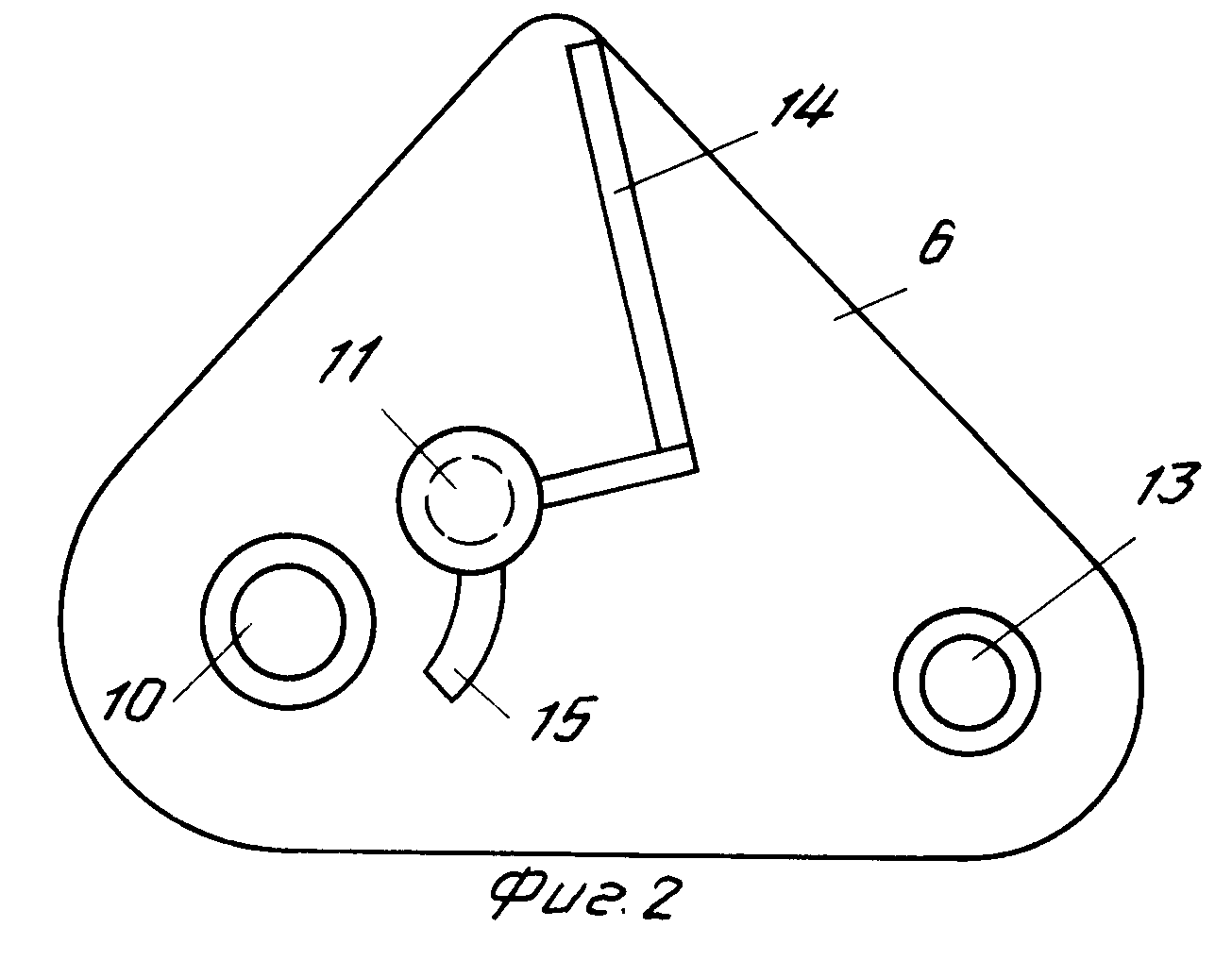
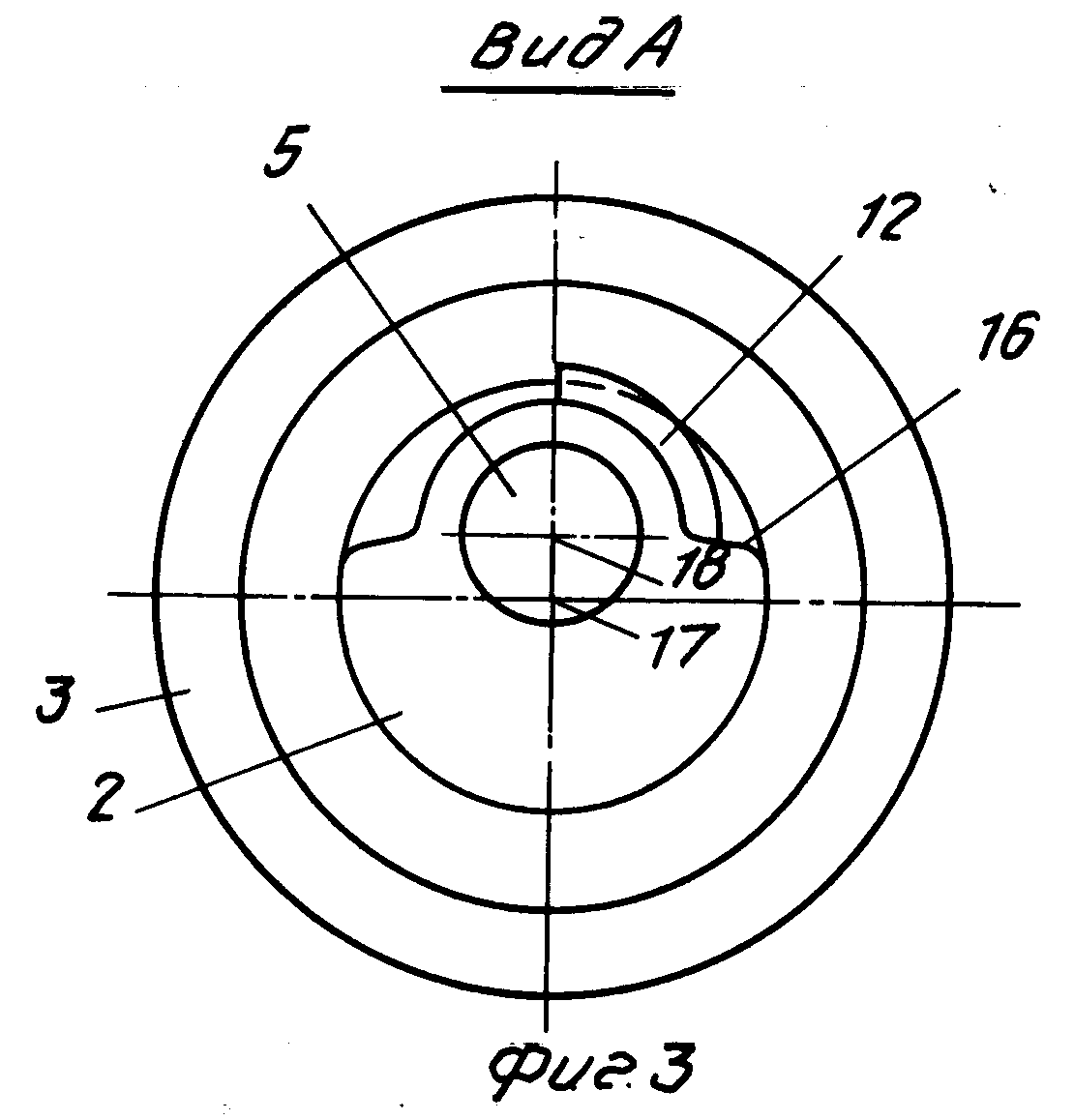
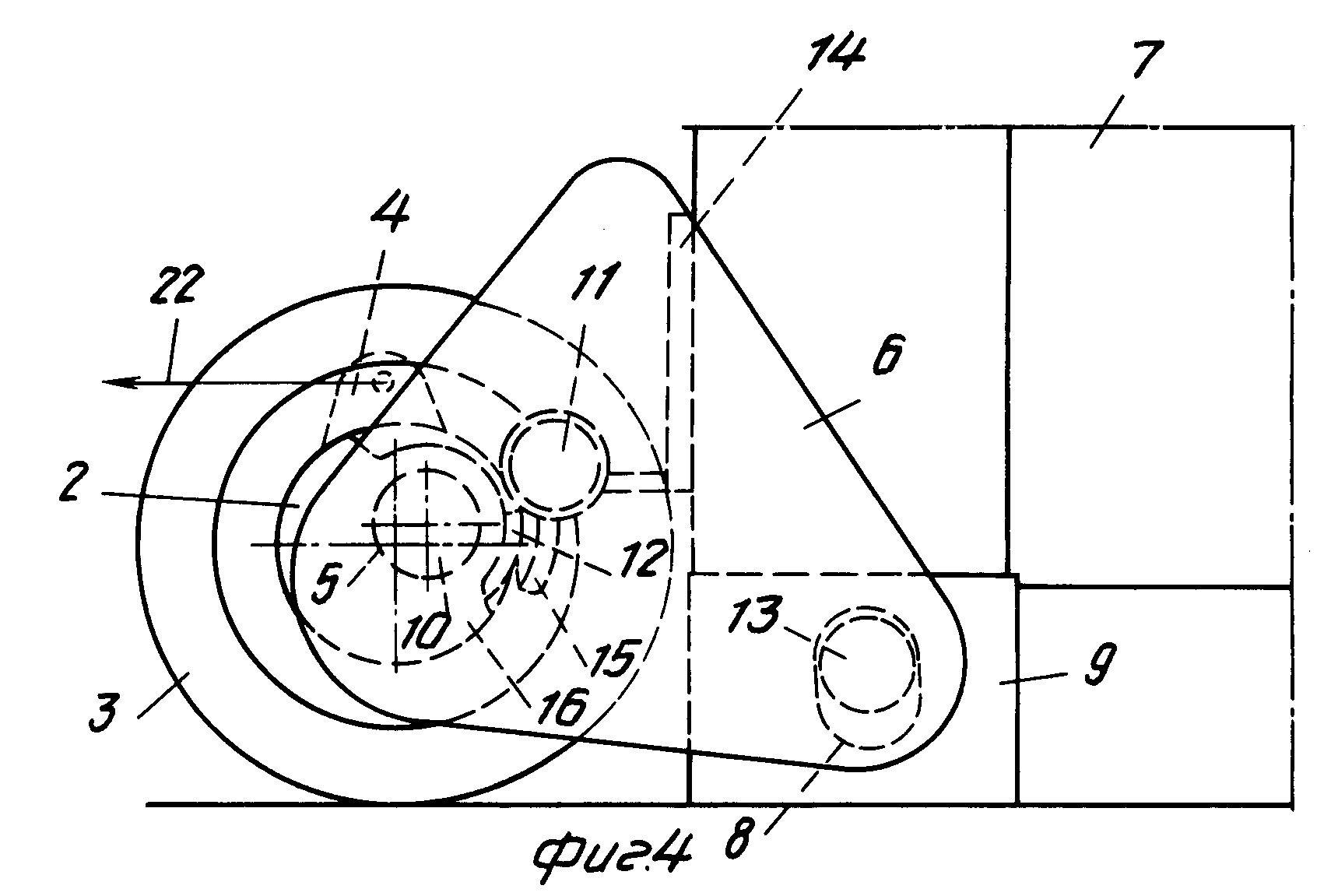
На фиг. 1 изображено устройство для подъема и перемещения расположенного на опорной поверхности груза с контейнером, который должен подниматься, и с удаленными средствами зацепления; на фиг. 2 вид с внутренней стороны одного из средств зацепления; на фиг. 3 вид по стрелке А на фиг.1; на фиг. 4 устройство перед началом подъема, вид сбоку; на фиг. 5 то же, в конце подъема; на фиг. 6 вид сбоку устройства фиг. 4 и 5, частичный вертикальный разрез, с другой конструкцией средств зацепления; на фиг. 7 то же, план.
Устройство 1 для подъема и перемещения расположенного на опорной поверхности груза содержит вал 2, на котором с возможностью вращения вокруг него установлены ролики 3, соединительное средство может устанавливаться на любой стороне относительно оси роликов. В данном примере на валу 2 установлено соединительное средство 4, приспособленное для взаимодействия с тяговым элементом, таким как трос или цепь 22 (на фиг. 4-6), на который может действовать подъемная сила и усилие перемещения.
Соединительное средство располагается на расстоянии от оси роликов 3 и, над ней таким образом, что усилие тягового элемента на нем пытается поворачивать устройство 1 относительно роликов 3 в направлении этого усилия. На концах этого вала имеются отверстия 5 во втулкообразной части, ось которой проходит параллельно оси роликов и на некотором расстоянии от нее между упомянутым валом и точкой зацепления на грузе.
Штыри 10 средств 6 зацепления могут вставляться в эти отверстия 5, хотя, стержень 13 средства 6 зацепления может вставляться одновременно в приемное отверстие 8 "отливки угла" 9, расположенной на внешней стороне контейнера 7 (фиг. 1). Вал 2 также имеет установленные на нем выступы 12, которые в определенном угловом положении средств 6 зацепления относительно вала 2 входят в зацепление с канавкой 23 (фиг.7) дополнительного штыря 11 средства 6 зацепления, чем предупреждается движение в осевом направлении средства зацепления и вала 2 относительно друг друга.
В результате, средство 6 зацепления аксиально фиксируется на валу 2. В другом угловом положении средства зацепления относительно вала 2 выступы 12 не входят во взаимодействие с канавкой 23 дополнительного штыря 11 и средство 6 зацепления может свободно перемещаться в осевом направлении относительно вала 2.
Штырь 10 средства 6 зацепления на фиг. 2 может вставляться в отверстие 5 вала 2, показанного на фиг. 3. Ось 18 отверстия 5 проходит параллельно оси 17 роликов 3. Стержень 13 может вставляться в отверстие груза, который должен захватываться. Поверхность вертикальной пластины 14 будет в этом случае опираться на груз. Если штырь 10 вставляется в отверстие 5 вала 2, угол вращения ограничивается благодаря тому, что кулачок 15 средства 6 зацепления может приходить в состояние контакта с дополнительным кулачком 16 вала 2.
На фиг. 4 изображено положение непосредственно перед подъемом груза, в этом случае контейнер 7 начинает подниматься. Вал 2 располагается непосредственно впереди фронтальной или задней стороны контейнера 7 и средство 6 зацепления вставляется штырями 10 в отверстия 5 вала 2, между тем как стержень 13 зацепления вставляется в отверстия 8 отливок углов 9 на боковой стороне контейнера 7. Опорная поверхность пластины 14 взаимодействует с торцовой поверхностью контейнера 7. Трос 22 крепится к соединительному средству 4, может передавать усилие в направлении стрелки и присоединяется к лебедке, расположенной на грузовой платформе или опрокидывающемся помосте грузового автомобиля. Непосредственно перед началом подъема существует зазор между кулачками 15, 16 средства 6 зацепления и вала 2 соответственно, между тем как выступ 12 вала 2 не входит в зацепление с проточкой 23 дополнительного штыря 11 средства 6 зацепления.
Если соединительное средство 4 зацепления будет тянуться в направлении, показанном на фиг. 4 стрелки, создается ситуация, показанная на фиг.5, в которой контейнер 7 поднимается у одного конца. Достаточно большое усилие, действующее в направлении горизонтальной стрелки, показанной на фиг. 5 (посредством тягового элемента 22) будет вынуждать вал 2 внутри роликов 3 вращаться в направлении этого действия. Штырь 10 вала эксцентрика в результате совершает круговое движение вокруг оси 17 роликов 3. Так как опорная поверхность вертикальной пластины 14 препятствует средству 6 зацепления вращательному движению в направлении, противоположном данному, то стержень 13 будет двигаться в направлении, показанном на фиг.5 вертикальной стрелкой.
Одновременно при помощи роликов 3 вал 2 будет перемещаться в направлении фронтальной стороны контейнера 7. Когда стержень 13 прижмется к верхней стороне отверстия 8, фронтальная сторона контейнера 7 будет подниматься. Во время вращательного движения вала 2 выступ 12 поворачивается и попадает в канавку 23 дополнительного штыря 11, в результате этого предотвращается совместное осевое движение и средство зацепления блокируется в осевом направлении. Эта блокировка уже имеет место, когда стержень 13 зацепления все еще свободно перемещается в направлении вверх. Во время подъема пара сил, созданная этим усилием, передается вокруг оси 17 роликов посредством плеча пары сил, которое определяется горизонтальным расстоянием между осью 17 роликов 3 и осью 18 отверстия 5. Во время подъема расстояние между кулачками 15 и 16 уменьшается. Когда эти кулачки приходят в состояние контакта друг с другом, подъем подходит к концу. Это происходит автоматически, благодаря тому, что пара сил, создаваемая в этом случае усилием, получающимся в соединительном средстве 4, должна передаваться вокруг оси 17 роликов 3 посредством большего плеча пары сил, равного горизонтальному расстоянию между осью 17 роликов 3 и точкой 19 приложения давления между стержнем 13 и отверстием 8.
Для дальнейшего подъема фронтальной стороны контейнера 7 требуется более сильная пара сил. При правильном выборе размеров плеча пары сил, увеличение силы, необходимое для дальнейшего подъема, при котором кулачки должны приходить в состояние контакта друг с другом, будет большим, чем увеличение силы, необходимое для преодоления сопротивления горизонтальному движению грузовой платформы или контейнера 7, все еще опирающегося его задней стороной на грунт. В этом случае, контейнер грузится на грузовую платформу, между тем как ролики 3 совершают движение по грузовой платформе.
Когда процесс погрузки завершается, при уменьшении усилия вал будет поворачиваться обратно к первоначальному положению, в котором стержень 13 падает одновременно с фронтальной стороной контейнера 7 таким образом, что контейнер приходит в состояние покоя на грузовой платформе.
И, наоборот, контейнер 7 может разгружаться с этой грузовой платформы одинаковым способом посредством разматывания тросов. В этом случае, усилие на тросе должно быть достаточно большим, чтобы удерживать кулачки 15 и 16 в состоянии контакта друг с другом.
Для подъема с устройством, показанным на фиг. 4 и 5, средство 6 зацепления не обладало способностью вращаться вокруг штыря 10 в направлении, противоположном направлению вращения вала 2 во время подъема. Это достигается поддерживающей поверхностью вертикальной пластины 14, которая упирается во фронтальную сторону контейнера 7. Однако, также имеются другие возможности для оказания противодействия этому противоположному вращению средства 6 зацепления. Например, может гарантироваться, что стержень 13 не может свободно вращаться в отверстии 8. Это может достигаться, например, изготовлением стержня 13 многоугольного в поперечном сечении с тем, чтобы он не мог поворачиваться в отверстии 8. Поддерживающая поверхность вертикальной пластины 14 в таком случае является ненужной, хотя, когда кулачки 15 и 16 находятся в состоянии контакта друг с другом, дальнейший подъем может продолжаться только передачей пары сил вокруг оси 17 роликов 3 при помощи плеча пары сил, которое является равным горизонтальному расстоянию между осью 17 роликов 3 и центром тяжести контейнера. Это относительно большое плечо пары сил требует большого увеличения усилия, которое всегда больше, чем увеличение усилия, которое является необходимым для погрузки контейнера.
Устройство для подъема и перемещения расположенного на опорной поверхности груза имеет другой вариант фиксации штыря относительно отверстия, изображенного на фиг. 6 и 7. В этом случае стержень 13 взаимодействует с отверстиями 20 в отливках углов 9 на фронтальной или задней стороне этого контейнера. Стержень 13 представляет собой поворотный фиксатор, который посредством поводка 21 может перемещаться между положением задвинутым и выдвинутым, при которых поворотный фиксатор-стержень 13 может вставляться в отверстие 20 отливки угла и, после поворота на четверть оборота, может задвигаться за кромки отверстия 20. Когда стержень задвигается в отливку угла 9, отливка угла зажимается между стержнем 13 и поддерживающей поверхностью вертикальной пластины 14. На фиг. 6 и 7 стержень 13 перемещается через отверстие в вертикальной пластине 14. На фиг. 6 показано задвинутое положение стержня 13, а его выдвинутое положение показано пунктирными линиями, между тем как фиг. 7 показывает выдвинутое положение стержня. На фиг. 7 изображен выступ 12 на валу 2, входящий во взаимодействие с канавкой 23 в дополнительном штыре 11 устройства 6 зацепления для фиксации в осевом направлении.
В этом случае соединение с контейнером 7 происходит следующим образом. Поддерживающая поверхность вертикальной пластины 14 располагается против контейнера 7, причем отверстие в поддерживающей поверхности вертикальной пластины находится на одной прямой с отверстием 20 отливки угла 9. Затем стержень вставляется через эти два отверстия при помощи поводка 21 и поворачивается на четверть оборота. В результате отливка угла 9 фиксируется между стержнем 13 и поддерживающей поверхностью вертикальной пластины 14 таким образом, что предупреждается вращение средства 6 зацепления в направлении, противоположном направлению вращения вала 2 во время подъема. Подъем осуществляется аналогично тому, как это было описано в отношении фиг.4 и 5.
Когда кулачки 16 и 15 приходят в состояние контакта друг с другом для дальнейшего подъема, пара сил, созданная усилием от троса, должна передаваться вокруг оси 17 роликов 3 при помощи плеча пары сил с длиной, равной горизонтальному расстоянию между осью 17 роликов 3 и центром тяжести контейнера. Необходимое для этого тяговое усилие, которое обеспечивает срабатывание средства 4, будет во много раз больше, чем усилие, требуемое для перемещения контейнера или грузовой платформы.
Реферат
Использование: относится к средствам для подъема и перемещения расположенного на опорной поверхности груза. Содержит: вал, на котором смонтирован с возможностью вращения относительно него по меньшей мере один ролик, средства зацепления для соединения с грузом и тяговый элемент и соединительное средство. Соединительное средство установлено на валу над осью вращения ролика и соединено с тяговым элементом, представляющим собой гибкую тягу. Каждое средство зацепления снабжено штырем и кулачком, а на конце вала установлены дополнительные кулачки и выполнены отверстия, геометрическая ось каждого из которых параллельна геометрической оси вращения ролика. Каждый штырь установлен с возможностью взаимодействия с соответствующим отверстием для соединения средства зацепления с валом и подъема конца груза с опорной поверхности. Каждый кулачок установлен с возможностью взаимодействия с соответствующим дополнительным кулачком для фиксации средства зацепления от дальнейшего вращения относительно вала. 3 з. п. ф-лы, 7 ил.
Комментарии