Способ и система замены грузовых единиц - RU2748932C2
Код документа: RU2748932C2
Чертежи





Описание
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к способу замены грузовых единиц, перевозимых на транспортном средстве. В частности, данное изобретение относится к замене первой грузовой единицы, перевозимой на транспортном средстве, на вторую грузовую единицу, первоначально расположенную на земле в непосредственной близости от транспортного средства или в другом аналогичном положении, так, чтобы в первую очередь выгрузить первую грузовую единицу с транспортного средства и после этого загрузить на транспортное средство вторую грузовую единицу.
УРОВЕНЬ ТЕХНИКИ
Как известно, для того, чтобы осуществить перевозку бункера или сменных грузовых единиц на транспортном средстве таком, как грузовой автомобиль, требуется сначала разгрузить автомобиль или убрать грузовую единицу с данного транспортного средства и после этого загрузить на него другую грузовую единицу. Очень часто цель смены грузовых единиц, таких как контейнеры, - доставить новый пустой контейнер, например, на строительную или иную площадку производства работ, и забрать оттуда полный контейнер. Как правило, пространство на таких площадках очень ограничено, или по определенным причинам новый пустой контейнер должен быть оставлен точно на том же месте, где располагался полный контейнер, что вызывает проблемы. Например, когда пустой контейнер доставляется на площадку, там может не быть свободного места, куда его поставить, даже на время, поэтому пустой контейнер приходится где-то оставить, потом взять полный контейнер и перевезти его в какое-нибудь другое место за пределами площадки, и только после этого опять забрать пустой контейнер и доставить его на площадку, и только после этого опять погрузить полный контейнер, ранее вывезенный с площадки, на транспортное средство для того, чтобы увезти его с объекта. Такая ситуация характерна для городской или иной плотно заселенной зоны или строительной площадки, где нет свободного места для того, чтобы осуществить процесс замены контейнеров. Иногда происходит так, что первый автомобиль привозит пустой контейнер в сопровождении другого порожнего автомобиля, при этом порожний автомобиль сперва забирает полный контейнер, подготовленный для вывоза, после чего первый автомобиль может оставить пустой контейнер и возвращаться назад пустым.
Понятно, что это вызывает много лишних движений и перегонов, отнимая много времени или отвлекая по нескольку автомобилей за раз, когда один идет пустым на объект, а другой возвращается пустым, делая весь процесс замены крайне неэффективным. По этой причине возникает явная потребность в системе, обеспечивающей эффективный способ смены контейнеров или других грузовых единиц, особенно на площадках с ограниченным свободным пространством, с целью предотвратить ненужные действия и холостой пробег автомобилей.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача изобретения заключается в том, чтобы облегчить и устранить проблемы известного уровня техники. Прежде всего, задача данного изобретения состоит в том, чтобы предложить систему и способ замены контейнеров или других грузовых единиц так, чтобы упомянутый процесс замены контейнеров мог быть выполнен на площадке, без необходимости сначала оставлять пустой контейнер на стороне, потом брать полный и перевозить его в другое место, опять забирать пустой контейнер и перевозить его на площадку по назначению, и только после этого опять загружать на автомобиль первоначальный полный контейнер. Кроме того, задача данного изобретения заключается в том, чтобы предложить такую систему и способ, при помощи которых контейнеры можно было бы заменять без необходимости перегона автомобиля, чтобы новый контейнер, доставленный на площадку, размещался бы практически в том же месте, где стоял контейнер, подготовленный к вывозу.
Задача изобретения может быть достигнута сочетанием отдельных признаков самостоятельных пунктов формулы изобретения.
Изобретение относится к системе замены минимум двух грузовых единиц. Также изобретение касается способа замены минимум двух грузовых единиц, а также к взаимной замене грузовой единицы и транспортного средства, составляющих систему взаимозаменяемых объектов.
В соответствии с другим вариантом осуществления изобретения, система замены предусматривает замену, по меньшей мере, первой и второй грузовых единиц, перевозимых на транспортном средстве. Термин «замена грузовых единиц» означает, например, выгрузку первого контейнера с транспортного средства на землю и погрузку второй грузовой единицы на то же самое транспортное средство. Грузовой единицей может быть, например, платформа или контейнер, или аналогичные изделия, имеющие первые и вторые торцы. Система замены эффективно устанавливается на транспортное средство или на грузовую единицу (платформу), а именно, в ее конечной части.
Система замены или транспортное средство содержит устройство для перемещения груза, такое как обычный крюк или любое другое подходящее приспособление, такое как цепь, стропы, ремень или трос, приспособленные для перемещения и разгрузки первой грузовой единицы с машины в первом направлении, как правило, назад по ходу движения автомобиля. Также первая грузовая единица устанавливается поверх второй грузовой единицы, расположенной в непосредственной близости от транспортного средства, например, на земле, позади или на рампе автомобильной платформы. После перемещения первой грузовой единицы и установки ее поверх второй грузовой единицы, подвижное устройство освобождает первую грузовую единицу и захватывает вторую грузовую единицу, находящуюся под первой. После захвата, оно перемещает и загружает вторую грузовую единицу на транспортное средство так, чтобы первая грузовая единица все еще находилась (хотя бы частично) поверх второй грузовой единицы хотя бы в начале перемещения второй грузовой единицы, и так, чтобы первая грузовая единица могла способом скольжения сместиться по верхней плоскости и вдоль второй грузовой единицы в упомянутом первом направлении относительно второй грузовой единицы во время погрузки второй грузовой единицы на транспортное средство. Первая грузовая единица скользит по верхней поверхности и вдоль второй грузовой единицы до тех пор, пока первый торец первой грузовой единицы не коснется и(или) не пройдет через второй торец второй грузовой единицы. Также, второй торец первой грузовой единицы обычно касается земли, когда первая грузовая единица скользит вдоль второй грузовой единицы.
В соответствии с другим вариантом осуществления изобретения, система замены предусматривает посадочное устройство, устанавливаемое между первым торцом первой грузовой единицы и вторым торцом второй грузовой единицы, которое служит для перемещения или опускания на землю первого торца первой грузовой единицы безопасным, контролируемым и эффективным способом. Первая часть посадочного устройства крепится к первому торцу первой грузовой единицы, а вторая часть посадочного устройства крепится ко второму торцу второй грузовой единицы. В качества посадочного устройства можно использовать, например, трос или крюк с тормозным цилиндром.
Посадочное устройство эффективно обеспечивает перемещение переднего торца упомянутой первой грузовой единицы на более низкий уровень, чем второй торец второй грузовой единицы, фактически на землю. Опускание первого торца первой грузовой единицы происходит предпочтительно, когда подвижное устройство перемещает и загружает вторую грузовую единицу на транспортное средство, и после того как первый торец первой грузовой единицы коснулся или предпочтительно также прошел мимо, или проходит мимо второго торца второй грузовой единицы.
В соответствии с другим вариантом осуществления изобретения, система или посадочное устройство также содержит тормозной механизм для замедления скорости движения к земле первого торца первой грузовой единицы, чтобы первый торец первой грузовой единицы не ударялся о землю под воздействием силы тяжести и не причинял никаких повреждений и не создавал опасных ситуаций. Тормозной механизм можно выполнить, например, в виде тормозного цилиндра - пневматического или гидравлического, пружинной или механической конструкции, такой, как фрикционный тормоз. Также может быть использован электрический или гидравлический электродвигатель для торможения или сопротивления движению первого торца первой грузовой единицы в сторону земли. Для примера, кабель, ремень или цепь, или другие аналогичные приспособления, могут также быть присоединены к первой грузовой единице, и в частности, к первому торцу первой грузовой единицы так, чтобы ее можно было переместить по направлению вниз управляемым образом, например, при разматывании троса электродвигателем или аналогичным устройством. В соответствии с другим вариантом осуществления изобретения, тормозное устройство выполнено с возможностью эксплуатации управляемым способом, а также для контроля движения или опускания первого торца первой грузовой единицы.
В соответствии с другим вариантом осуществления изобретения, система замены может также включать в себя систему торможения для контроля скорости скольжения первой грузовой единицы во время ее смещения по верхней поверхности и вдоль второй грузовой единицы в упомянутом первом направлении, или для второй грузовой единицы во время ее погрузки на транспортное средство так, чтобы первая грузовая единица не ударилясь о землю неконтролируемым образом. Когда первая грузовая единица осуществляет скольжение вдоль второй грузовой единицы, система имеет конструктивное решение для освобождения тормозной системы от первой грузовой единицы самое позднее, когда первый торец первой грузовой единицы коснулся или прошел мимо второго торца второй грузовой единицы.
В соответствии с другим вариантом осуществления изобретения, грузовая единица, используемая в системе взаимозаменяемых грузов, содержит траекторию скольжения, такую как, например, рельс или паз, или аналогичное приспособление, встроенное в верхнюю часть грузовой единицы для приема и обеспечения скольжения другой грузовой единицы по упомянутой траектории в первом направлении, или для нижней грузовой единицы во время погрузки или выгрузки грузовых единиц на транспортное средство.
В соответствии с другим вариантом осуществления изобретения, вторая грузовая единица может включать в себя траекторию скольжения и стопорный элемент. Стопорный элемент может быть соединен с траекторией скольжения так, чтобы он останавливал скольжение первой грузовой единицы во время перемещения по траектории скольжения, например, во время выгрузки упомянутой первой грузовой единицы с транспортного средства и/или погрузки второй грузовой единицы на транспортное средство. В соответствии с примером, первая грузовая единица может включать в себя элемент скольжения, выполненный с возможностью скольжения вдоль упомянутой траектории, причем элемент скольжения выполнен с возможностью касания стопорного приспособления с целью остановки скольжения. Траектория скольжения вместе с элементом скольжения также определяет и обеспечивает направление скольжения первой грузовой единицы контролируемым образом вдоль второй грузовой единицы так, что первая грузовая единица не может упасть со второй грузовой единицы.
Стопорный элемент может включать в себя отводящий элемент, например, рампу, имеющую клиновидную форму, для отклонения элемента скольжения первой грузовой единицы в сторону стопорного элемента посредством взаимодействия с упомянутым элементом скольжения первой грузовой единицы во время ее скольжения по траектории скольжения. Стопорный элемент устанавливается в положение, в котором, когда элемент скольжения доходит до стопорного элемента, большая часть (или центр тяжести, который, как правило, находится в геометрическом центре) первой грузовой единицы уже переместилась или, по меньшей мере, продолжает скользить мимо второго торца второй грузовой единицы. В данной точке или после нее зона второго торца первой грузовой единицы будет находиться в наклонном положении к земле под воздействием силы тяжести, поэтому зона второго торца первой грузовой единицы больше не опирается на вторую грузовую единицу. Когда отклоняющий элемент отклоняет элемент скольжения первой грузовой единицы в сторону стопорного элемента в данном положении, элемент скольжения первой грузовой единицы держится прижатым к стопорному элементу под воздействием силы тяжести, предотвращая таким образом любое последующее скольжение первой грузовой единицы. Следует отметить, что можно продолжить перемещение скольжением первой грузовой единицы до конца, когда второй торец первой грузовой единицы опирается на землю, например.
Стопорный элемент предпочтительно имеет регулируемую конструкцию, поэтому может устанавливаться в необходимое положение относительно второй грузовой единицы. Положение стопорного элемента следует выбирать исходя из габаритов, особенно длины и центра тяжести (как правило, в геометрическом центре) первой грузовой единицы, которая будет перемещаться по траектории скольжения так, чтобы отклоняющий элемент осуществил отклонение, а стопорный элемент произвел остановку элемента скольжения, когда центр тяжести первой грузовой единицы проходит через зону второго торца второй грузовой единицы. Так можно гарантировать, что зона второго торца первой грузовой единицы находится в наклонном положении, зона первого торца и элемент скольжения направлены вверх и прижаты к стопорному элементу силой тяжести. Поэтому стопорный элемент может остановить и удерживать в неподвижном положении первую грузовую единицу относительно второй грузовой единицы. В соответствии с приведенным примером, стопорное устройство включает в себя несколько стопорных элементов, как в верхней, так и в нижней зонах траектории скольжения с целью гарантированной остановки скольжения первой грузовой единицы относительно второй грузовой единицы.
Первая грузовая единица может продолжить свое скользящее движение относительно второй грузовой единицы и даже сойти с нее, когда первый торец первой грузовой единицы пройдет стопорные элементы. Это можно осуществить, например, путем перемещения первого торца или элемента скольжения слегка вниз, что можно сделать, например, путем незначительного подъема второго торца первой грузовой единицы. Подъем второго торца первой грузовой единицы можно выполнить, прижав ее к земле, или приподнять вторую грузовую единицу и тем самым освободить зажим первой грузовой единицы.
Следует отметить, что стопорный элемент может устанавливаться в разных положениях, на разных расстояниях, тем самым обеспечивая большую уверенность в надлежащем выполнении операции остановки скольжения второй грузовой единицы. Также следует отметить, что стопорный элемент может включать в себя амортизирующий механизм для поглощения кинетической энергии первой грузовой единицы при остановке ее движения. Амортизирующее устройство можно выполнить, например, в виде резиновой прокладки, пружины или иного приспособления, известного специалистам в данной области техники. Также амортизирующий механизм устанавливается на второй грузовой единице, при этом, когда первая грузовая единица осуществляет скольжение и ударяется о стопорный механизм, весь стопорный элемент будет перемещен относительно второй грузовой единицы под контролем амортизирующего механизма.
Благодаря стопорному элементу система замены грузовых единиц может быть выполнена даже без тормозного механизма, который в иных обстоятельствах используется для контроля скорости скольжения первой грузовой единицы. Стопорный элемент может также использоваться для повышения безопасности, а именно, он предотвращает соскальзывание первой грузовой единицы благодаря таким механическим приспособлениям, как отклоняющий и стопорный элементы.
Также вторая грузовая единица может включать в себя подводящий элемент в торцевой части второй грузовой единицы, такой подводящий элемент изготовлен с возможностью подвода первого торца первой грузовой единицы к посадочному устройству.
Подводящий элемент может включать в себя, например, отклоняющий элемент, рампу, например, клиновидной конструкции, которая будет отклонять первый торец первой грузовой единицы или элемент скольжения первой грузовой единицы так, чтобы он касался посадочного устройства, и в соответствии с другим вариантом осуществления изобретения касался второго торца (в зоне свободного торца) посадочного устройства. Когда первый торец первой грузовой единицы коснулся второго торца второй грузовой единицы и второго торца посадочного устройства, посадочное устройство перемещает первый торец первой грузовой единицы на более низкий уровень, чем второй торец второй грузовой единицы, согласно описанию в настоящем документе. Подводящий элемент дополнительно гарантирует, что зона второго торца первой грузовой единицы находится в захвате посадочного устройства и свободного торца посадочного устройства.
Настоящее изобретение предлагает преимущества по сравнению с известным уровнем техники, а именно, обеспечивает очень легкий и экономичный по времени процесс замены контейнеров, особенно в условиях ограниченного пространства, и так, чтобы транспортное средство, используемое для транспортировки контейнеров, находилось в неподвижном состоянии в течение всего процесса замены грузов. В частности, данное изобретение обеспечивает возможность выгрузки первой грузовой единицы с машины на землю и погрузки второй грузовой единицы с земли на ту же машину без какой-либо необходимости перемещать транспортное средство, чтобы первую грузовую единицу можно было оставить после завершения всего процесса замены грузов фактически на том месте, где изначально располагалась вторая грузовая единица.
Примерные варианты осуществления изобретения, приведенные в тексте настоящего документа, не должны пониматься как ограничивающие факторы в отношении применимости прилагаемой формулы. Фраза «включает в себя» используется в данном тексте в качестве открытого ограничения, не исключающего существования неназванных признаков. Если не указано иное условие, признаки, названные в соответствующих формулах, могут свободно сочетаться в любой комбинации.
Новые отличительные признаки изобретения, считающиеся характерными для данного изобретения, приводятся в прилагаемых формулах. Однако, само изобретение, как с точки зрения его конструктивных особенностей, так и метода действия, вместе с дополнительными задачами, а также преимуществами, получаемыми при их решении, будут наиболее понятны на основании следующего описания конкретных примеров осуществления вариантов изобретения, во взаимосвязи с сопроводительными чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже изобретение будет описано более подробно со ссылкой на примерный вариант осуществления изобретения в соответствии с сопроводительными чертежами, где:
фигуры 1A-1J иллюстрируют пример принципиальной системы и способа замены первой и второй грузовых единиц, перевозимых на транспортном средстве в соответствии с вариантом осуществления изобретения,
фигуры 2А-2С иллюстрируют примерную систему, применяемую для замены грузов в соответствии с вариантом осуществления изобретения,
фигуры 3А-3В иллюстрируют примерную конструкцию посадочного устройства в соответствии с вариантом осуществления изобретения,
фигура 4А иллюстрирует примерную грузовую единицу в разрезе, с траекторией скольжения в соответствии с вариантом осуществления изобретения,
фигура 4В иллюстрирует еще один пример траектории скольжения с элементом скольжения в соответствии с вариантом осуществления изобретения,
фигуры 5А-5В иллюстрируют примерное посадочное устройство с тормозным элементом в соответствии с вариантом осуществления изобретения,
фигуры 6А-6С иллюстрируют принцип действия посадочного устройства в соответствии с вариантом осуществления изобретения,
фигуры 7А-7Н иллюстрируют примеры конструкций траекторий скольжения для направления движения грузовых единиц в соответствии с вариантом осуществления изобретения, и
фигуры 8А-8С иллюстрируют примеры грузовых единиц в соответствии с вариантом осуществления изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
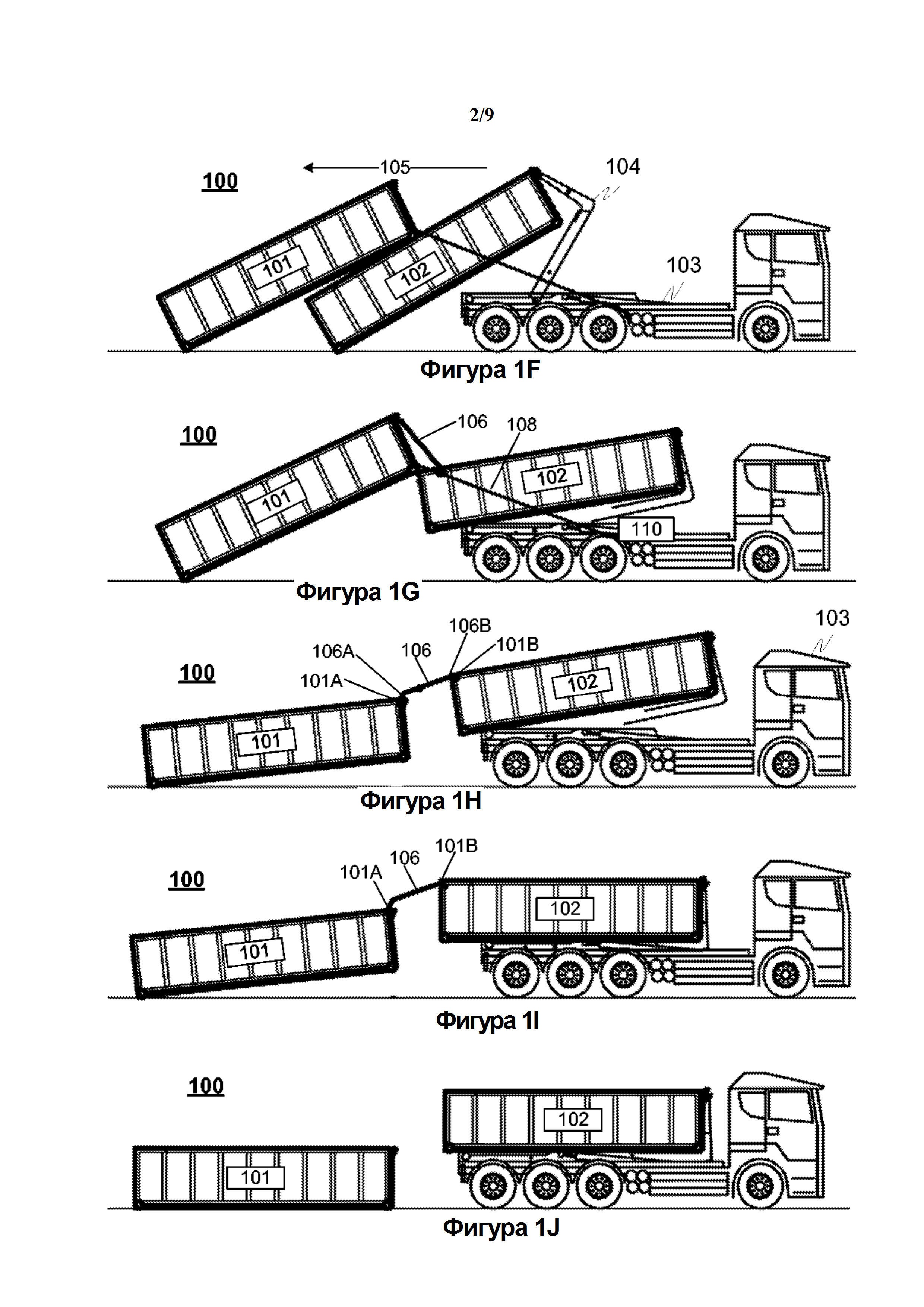
Фигуры 1A-1J иллюстрируют принципиальную схему примерной замены 100 и способ замены первой 101 и второй 102 грузовых единиц, перевозимых на транспортном средстве 103 в соответствии с вариантом осуществления изобретения, где на Фигуре 1А транспорт 103 привозит первую грузовую единицу 101 на площадку и вывозит вторую грузовую единицу 102. На Фигурах 1B-1D устройство перемещения 104 перемещает и выгружает первую грузовую единицу 101 с машины в первом направлении 105 назад по ходу ее движения и поверх второй грузовой единицы 102. Устройство перемещения 104 выглядит как обычная система с крюком, но может быть и любое другое решение, например, цепь, стропы, ремень или трос, приспособленные для перемещения грузовых единиц.
На Фигуре 1Е устройство перемещения 104 освобождает первую грузовую единицу 101 и захватывает вторую грузовую единицу 102, расположенную под первой грузовой единицей 101. Также тормозная система 108 может быть прикреплена к первому торцу 101А первой грузовой единицы, когда осуществляется захват второй грузовой единицы 102 для ее погрузки. На Фигуре 1F устройство перемещения 104 перемещает и осуществляет погрузку второй грузовой единицы 102 на транспортное средство так, чтобы первая грузовая единица 101 скользила по верхней поверхности и вдоль второй грузовой единицы 102 в упомянутом первом направлении 105 относительно второй грузовой единицы во время погрузки второй грузовой единицы 102 на транспортное средство 103. Тормозная система 108 замедляет движение или контролирует скорость скольжения первой грузовой единицы 101 вдоль и поверх второй грузовой единицы 102. Траектория скольжения 109 (более подробно проиллюстрированная на Фигуре 4) устроена в верхней зоне второй грузовой единицы 102, вдоль которой скользит первая грузовая единица 101.
Первая грузовая единица 101 скользит поверх (под действием силы тяжести, но может быть предусмотрен и соответствующий механизм) и вдоль второй грузовой единицы 102 практически до того момента, когда первый торец 101А первой грузовой единицы 101 дойдет до или пройдет второй торец 102В второй грузовой единицы 102, как показано на Фигуре 1G (часть посадочного устройства 106 показана в частично открытом виде на Фигуре 1G, но это сделано только для иллюстративных целей принципа функционирования посадочного блока). Когда первый торец 101А первой грузовой единицы 101 доходит до или проходит второй торец 102В второй грузовой единицы 102, посадочное устройство 106 активируется между первым торцом 101А первой грузовой единицы 101 и вторым торцом 102В второй грузовой единицы 102 (более подробно показано на Фигурах 6А-6С). В качестве примера, первая часть 106А (прикрепленная часть) посадочного устройства 106 крепится к зоне первого торца 101А первой грузовой единицы, в то время как вторая часть 106В (зона свободного торца) изготовлена с возможностью захвата второго торца 102В второй грузовой единицы 102.
Пока вторая грузовая единица 102 все еще перемещается в сторону транспорта и укладывается на него (в направлении, противоположном направлению 105), свободный торец 106В посадочного устройства 106 опирается на зону второго торца 102В второй грузовой единицы 102, при этом посадочное устройство 106 выполнено с возможностью перемещать первый торец 101А первой грузовой единицы 101 на уровень, ниже второго торца 102В второй грузовой единицы 102, фактически до земли, как показано на Фигурах 1Н-1J.
Следует отметить, что система торможения 108 может использоваться для контроля скорости скольжения первой грузовой единицы 101 при ее движении поверх и вдоль второй грузовой единицы 102 во время погрузки второй грузовой единицы 102 на транспортное средство 103. Система торможения 108 отключается от первой грузовой единицы 101, самое позднее, после того как первый торец 101А первой грузовой единицы 101 коснулся и прошел мимо второго торца 102В второй грузовой единицы 102. В соответствии с примером, первый торец 108А системы торможения 108 может быть подсоединен ко второй грузовой единице 102 или к транспортному средству 103, а второй торец 108В системы торможения 108 - к первой грузовой единице 101 и, в частности, к первому торцу 101А упомянутой первой грузовой единицы 101, как проиллюстрировано на Фигуре 2С.
Примерная система торможения 108, показанная на Фигурах 1G и 2С, выполнена в виде троса 108, разматывание которого можно контролировать при помощи электродвигателя 110 - например, электрического или гидравлического. Однако следует отметить, что в соответствии с примерным вариантом осуществления изобретения, и особенно когда другой конец троса прикреплен к транспортному средству, может не возникать необходимости контроля длины (сматывания или разматывания) троса, но трос может иметь определенную фиксированную длину, предусмотренную так, что когда грузовая единица выгружается, например, при помощи обычного крюка 104, траектория движения первого торца 101А первой грузовой единицы 101 такова, что фиксированной длины троса достаточно. Это же условие также применимо к процессу установки на земле или опускания первого торца 101А первой грузовой единицы 101, например, потому, что первый торец 101А фактически больше не двигается относительно земли или транспортного средства в направлении 105, когда находится в опущенном состоянии.
Систему торможения 108 также можно реализовать при помощи других приспособлений, таких как пружина или тормозной цилиндр - пневматический или гидравлический, изготовленных с возможностью контроля скорости скольжения первой грузовой единицы при помощи усилия пружины или усилия тормозного цилиндра. Кроме того, система торможения может также включать в себя фрикционный тормоз или другую тормозную систему, подходящую для указанных целей и известную специалистам в данной области техники, такую как рычаг в виде штанги или стержня.
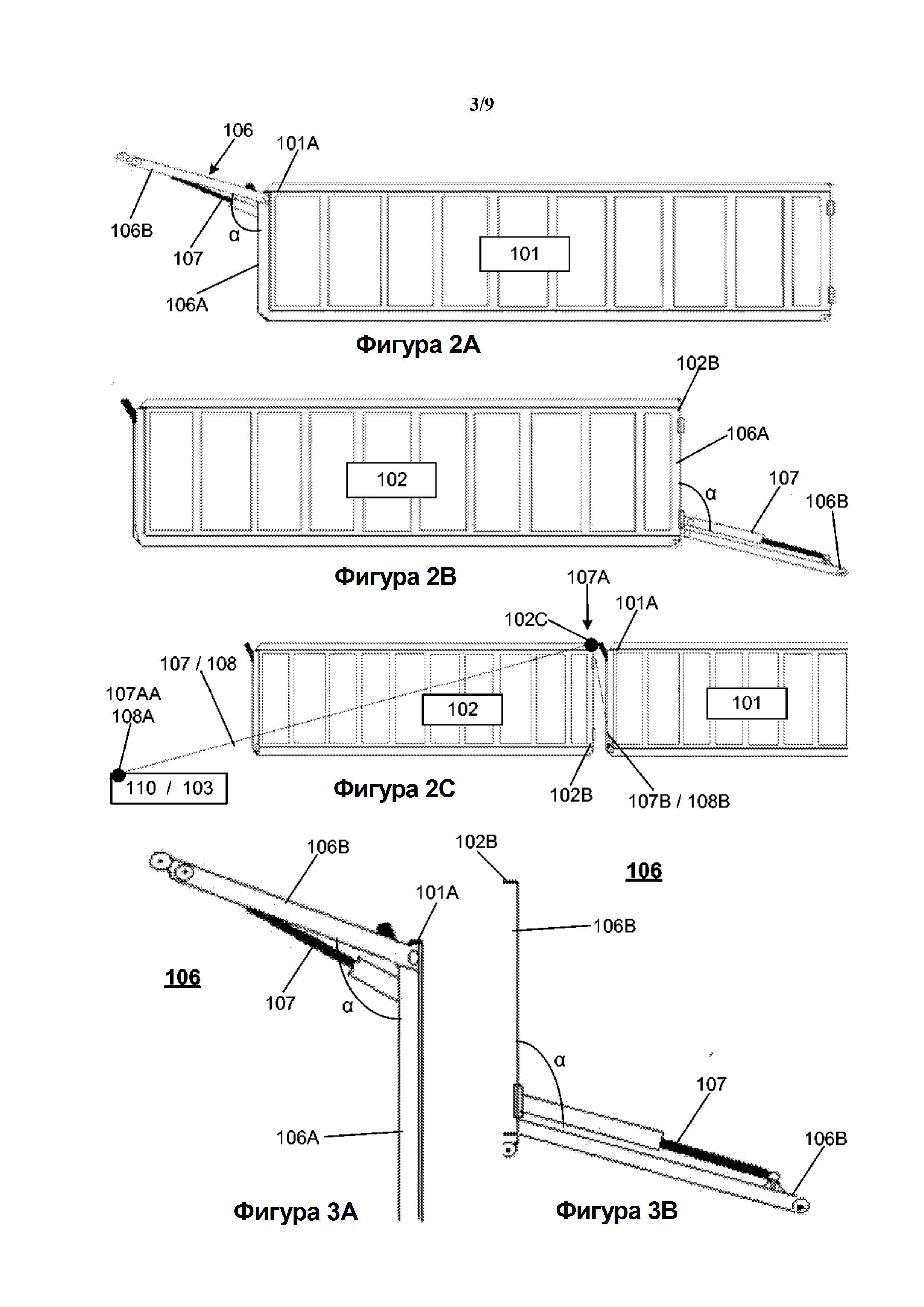
Фигуры 2А-2С и Фигуры 3А-3В иллюстрируют примерную систему 100 замены грузов в соответствии с другим вариантом осуществления изобретения, где на Фигурах 2А и 3А показано, что посадочное устройство 106 встроено в передний торец 101А первой грузовой единицы 101, а на Фигурах 2В и 3В посадочное устройство 106 встроено во второй торец 102В второй грузовой единицы 102.
На примере Фигур 2А и 3А (соответствующем системе и способу 100, проиллюстрированному на Фигурах 1A-1J), первая часть 106А посадочного устройства 106 интегрально прикреплена к первому торцу 101А первой грузовой единицы 101, при этом вторая свободная часть 106В посадочного устройства 106 изготовлена с возможностью захвата и опоры на второй торец 102В второй грузовой единицы 102, когда первый торец 101А первой грузовой единицы 101 перемещается через второй торец 102В второй грузовой единицы в первом направлении 105, как показано на Фигурах 1G-1H.
В альтернативном варианте осуществления изобретения, на Фигурах 2В и 3В можно видеть, что первая часть 106А посадочного устройства 106 также может быть интегрально прикреплена ко второму торцу 102В второй грузовой единицы 102, при этом вторая свободная часть 106В посадочного устройства изготовлена с возможностью захвата и опоры на первый торец 101А первой грузовой единицы 101, когда первый торец 101А первой грузовой единицы 101 перемещается через второй торец 102В второй грузовой единицы в первом направлении 105 (как показано на Фигурах 1G-1H).
Первая и вторая части 106А, 106В соединены друг с другом при помощи поворотного устройства, например шарнира (петель), так, чтобы угол между первой и второй частями 106А, 106В открывался, когда посадочное устройство 106 активируется и перемещает или опускает на землю первый торец 101А первой грузовой единицы 101. Посадочное устройство 106 включает в себя тормозной элемент 107, изготовленный с возможностью приложения силы сопротивления движению первой и второй частей 106А, 106В в направлении друг от друга, или противодействия увеличению угла α между первой и второй частями 106А, 106В, и тем самым обеспечивая медленное опускание первого торца 101А первой грузовой единицы 101.
Фигура 2С иллюстрирует другой пример, когда посадочное устройство 106 с тормозным элементом 107 выполнено в виде троса, разматывание и намотка которого находится под контролем. В другом варианте осуществления изобретения первая часть 107А троса прикреплена или соединена со вторым торцом 102В второй грузовой единицы 102, а вторая часть 107В троса прикреплена или соединена с первым торцом 101А первой грузовой единицы 101. В соответствии с другим вариантом осуществления изобретения предусматривается опорная точка 102С на втором торце 102В для крепления первой части 107А троса к верхней части второго торца второй грузовой единицы. Разматывание и(или) наматывание троса 107 может контролироваться, например, при помощи электродвигателя 110, к которому присоединен первый торец 107АА троса. Также могут использоваться и другие механизмы. Посредством управления процессом разматывания или намотки троса 107 можно управлять и контролировать скорость перемещения или опускания первого торца 101А первой грузовой единицы.
В соответствии с примером, тросовая система 107 (или аналогичное устройство) может быть изготовлена с возможностью функционирования как тормозной системы 108 для контроля скорости скольжения первой грузовой единицы 101 во время ее скольжения по верхней поверхности и вдоль второй грузовой единицы 102 при погрузке второй грузовой единицы 102 на транспортное средство, но также и тормозного элемента 107 для замедления скорости опускания (приземления) первого торца 101А первой грузовой единицы 101, после того как первый торец 101А первой грузовой единицы 101 коснулся или прошел мимо второго торца 102В второй грузовой единицы 102. В соответствии с предпочтительным вариантом осуществления изобретения, трос 107/108 (один и тот же трос, выполняющий две разные функции) может сначала быть соединенным с первым торцом 101А первой грузовой единицы 101 через опорную точку 102С, после чего трос 107/108 автоматически функционирует как тормозной элемент 107, после того как первый торец 101А первой грузовой единицы 101 коснулся или прошел мимо второго торца 102В второй грузовой единицы 102.
На Фигурах 3А и 3В показано более подробное осуществление посадочного устройства 106 и тормозного элемента 107. Тормозной элемент 107 можно выполнить, например, в виде тормозного цилиндра - пневматического или гидравлического, пружинной или механической конструкции, такой, как фрикционный тормоз. Также может быть использован электрический или гидравлический электродвигатель для торможения или сопротивления движению первого торца 101А первой грузовой единицы 101 в сторону земли. Для примера, трос 107 может также быть присоединен к первой грузовой единице 101 (как показано на Фигуре 2С), и в частности к первому торцу 101А первой грузовой единицы 101 так, чтобы 101А/101 можно было переместить по направлению вниз управляемым образом, например, при разматывании троса 107 электродвигателем 110 или аналогичным устройством. В соответствии с другим вариантом осуществления изобретения, тормозное устройство выполнено с возможностью функционирования в контролируемом режиме.
В соответствии с примером, срабатывание тормозного элемента 107 может быть контролируемым, при этом скорость перемещения или опускания первого торца 101А первой грузовой единицы 101 может контролироваться бесступенчатым способом, чтобы первый торец 101А первой грузовой единицы 101 опускался до земли в безопасном и контролируемом режиме.
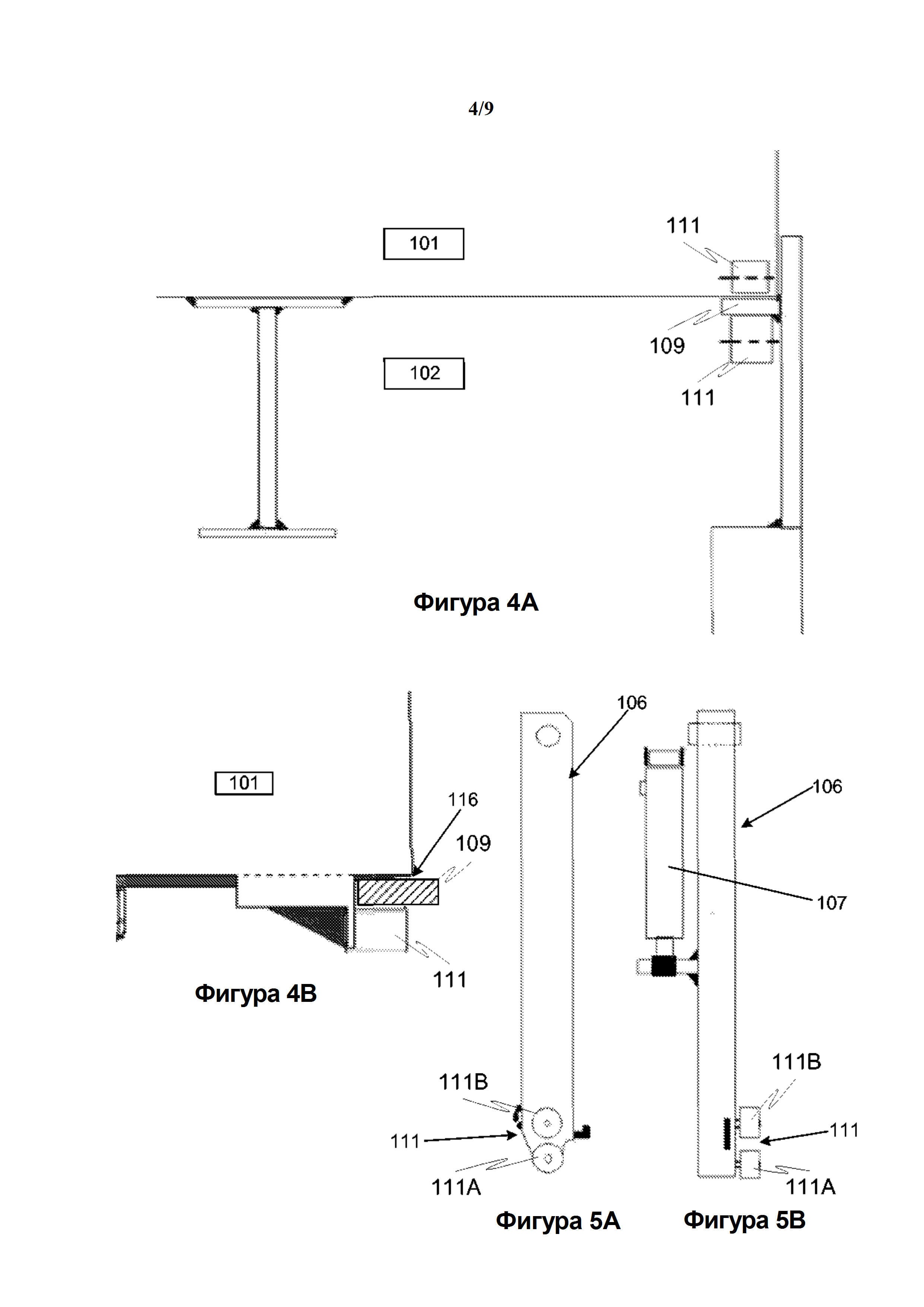
Фигура 4А иллюстрирует в разрезе пример грузовой единицы 101, 102 с траекторией скольжения 109 в соответствии с другим вариантом осуществления изобретения, при котором траектория скольжения 109 изготовлена с возможностью приема и обеспечения скольжения другой грузовой единицы 101, 102 вдоль траектории скольжения 109 в первом направлении 105 или параллельно продольной оси грузовой единицы и относительно нижней грузовой единицы 101 во время погрузки на транспортное средство 103 или выгрузки грузовых единиц 101, 102 с него. Траектория скольжения 109 включает в себя рельс или паз, встроенные в верхнюю часть грузовой единицы 101. В качестве альтернативного варианта, она может быть встроена в нижнюю часть грузовой единицы 102.
Грузовая единица 101, скользящая по траектории скольжения 109, включает в себя элемент скольжения 111, выполненный в виде колес, полозьев, лыж или другой аналогичной конструкции. Следует отметить, что скользящий элемент 111 взаимодействует с посадочным устройством 106, как более подробно показано на Фигурах 5А-5В и 6А-6С. Также следует отметить, что скользящий элемент 111 может быть установлен на обеих сторонах траектории скольжения 109, так, траектория скольжения 109 и скользящий элемент 111 захватывают или удерживают грузовую единицу 101, осуществляющую скольжение вдоль траектории скольжения 109, в контакте с грузовой единицей 102, расположенной под скользящей грузовой единицей 101.
Фигура 4В иллюстрирует другой пример траектории скольжения 109, где она выполнена в виде рельса или бруска 109. Первая грузовая единица 101, скользящая вдоль траектории скольжения 109, содержит принимающую конструкцию 116, образующую желоб или паз для приема траектории скольжения 109 в принимающую конструкцию 116. Принимающая конструкция 116 может быть образована, например, конструкцией основания первой грузовой единицы 101 или нижней частью первой грузовой единицы 101 вместе со скользящим элементом 111, вмонтированным в конструкцию первой грузовой единицы.
Фигуры 5А-5В иллюстрируют боковой вид и вид спереди примерного посадочного устройства 106 с тормозным элементом 107, выполненным в соответствии с другим вариантом осуществления изобретения, где скользящий элемент 111 хорошо различим. Пример скользящего элемента 111 включает в себя два колеса, в котором первое колесо 111А выполнено с возможностью установки под траекторией скольжения 109, а второе колесо 111В выполнено с возможностью установки поверх траектории скольжения 109.
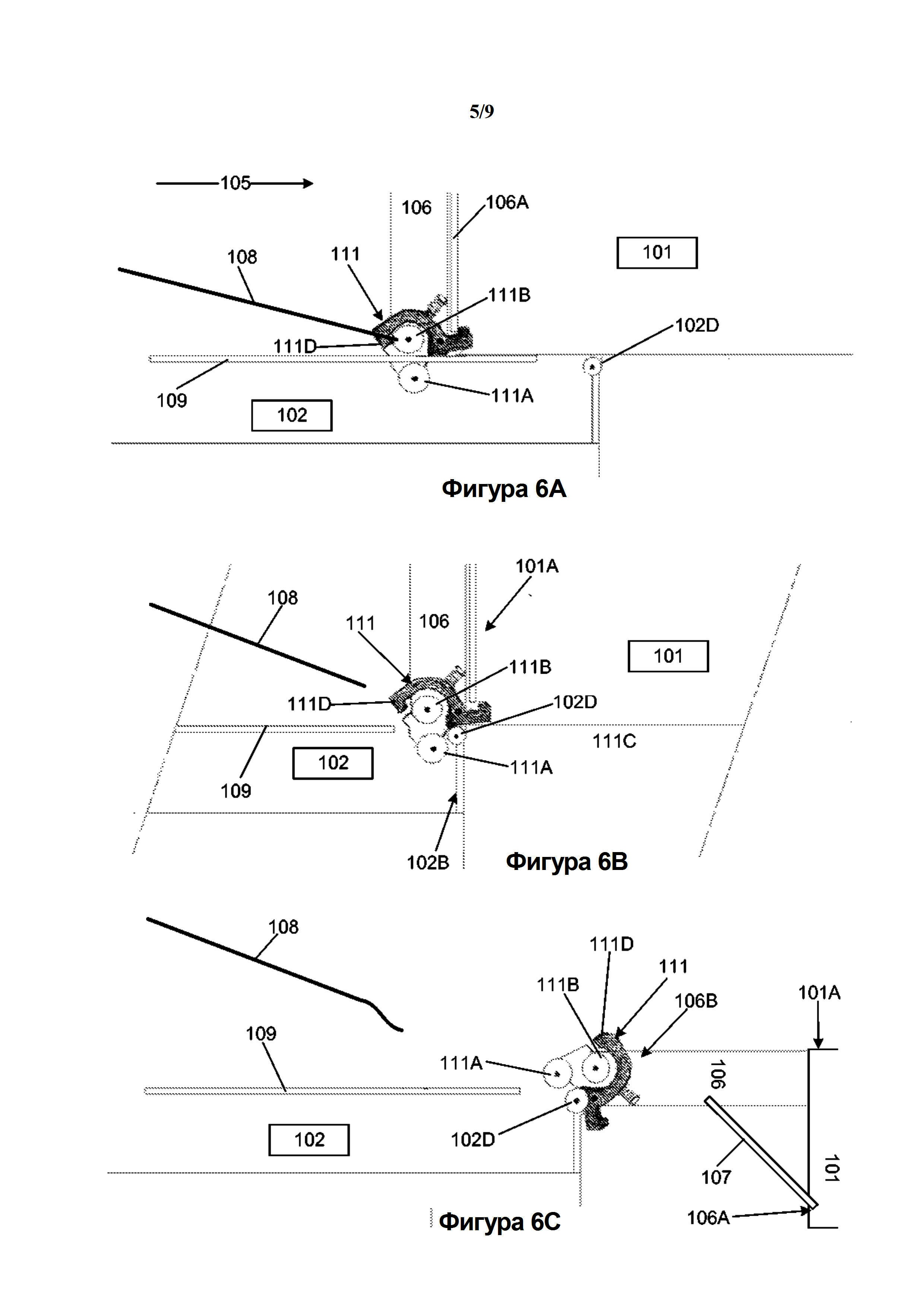
Фигуры 6А-6С иллюстрируют принцип действия посадочного устройства 106 с тормозным элементом 107 в соответствии с другим вариантом осуществления изобретения. На Фигурах 6А-6С первая грузовая единица 101 скользит по верхней поверхности второй грузовой единицы 102 по траектории скольжения 109 в направлении 105. Тормозная система 108 также используется (как вариант) для сопротивления свободному скольжению первой грузовой единицы 101, как указано в тексте настоящего документа. Второй торец 108В тормозной системы 108 соединен с первой грузовой единицей 101, скорость скольжения первой грузовой единицы по траектории скольжения 109 эффективно контролируется при помощи специального устройства, такого как, например, электродвигатель. Также контролирующее устройство может быть выполнено в виде любой другой системы, известной специалистам в данной области техники.
В варианте осуществления изобретения на Фигурах 6А-6С, первая часть 106А посадочного устройства 106 крепится к первому торцу 101А первой грузовой единицы 101. Когда первый торец 101А первой грузовой единицы 101 или, более конкретно, скользящий элемент 111 коснулся и/или прошел мимо второго торца 102В второй грузовой единицы 102 или опорной точки 102D, вторая часть 106В посадочного устройства 106 имеет возможность остановиться у второго торца 102В второй грузовой единицы 102 или опорной точки 102D и опирается на опорную точку 102D и поворачивается вокруг опорной точки 102D так, чтобы образовался угол между первой и второй частями 106А, 106В посадочного устройства 106. Увеличению угла между первой и второй частями 106А, 106В эффективно противодействует тормозной элемент 107.
Когда первый торец 101А первой грузовой единицы 101 коснулся второго торца 102В второй грузовой единицы 102, скользящий элемент 111 поворачивается вокруг опорной точки 102D (по часовой стрелке см. Фигуры 6А-6С). Одновременно, соединительный элемент 111D поворачивается и отсоединяет тормозную систему 108 (трос в варианте осуществления изобретения на Фигурах 6А-6С), если она применяется, от скользящего элемента 111, а также от первой грузовой единицы 101.
Следует повторить еще раз - когда вторая грузовая единица 102 загружается на транспортное средство 103, посадочное устройство 106 перемещает или опускает первый торец 101А первой грузовой единицы 101 на землю, или по меньшей мере на более низкий уровень, чем второй торец 102В второй грузовой единицы 102. Когда угол, образованный между первой и второй частями 106А, 106В посадочного устройства, достаточно увеличивается, или второй торец 106В посадочного устройства или фактически скользящий элемент 111 поворачивается вокруг опорной точки 102D, второй торец 106В освобождается из контакта со вторым торцом 102В или опорной точкой 102D второй грузовой единицы 102. Так, посадочное устройство 106 выполнено с возможностью отсоединения после того, как первый торец 101А первой грузовой единицы 101 перемещен на более низкий уровень, чем второй торец 102В второй грузовой единицы 102.
Фигуры 7А-7Н иллюстрируют примеры конструкций траекторий скольжения 109 для направления движения грузовых единиц 101, 102, а также функционирования запорного элемента в соответствии с другим предпочтительным вариантом осуществления изобретения. Как видно на Фигурах 7А-Н, вторая грузовая единица 102 содержит траекторию скольжения 109 и, дополнительно, запорный элемент 112 для остановки скольжения первой грузовой единицы 101 (показаны в деталях на Фигурах 7C-7G) во время ее перемещения по траектории скольжения 109.
Запорный элемент 112 включает в себя отклоняющий элемент 113, выполненный виде клиновидной рампы 113, предназначенный для отклонения скользящего элемента 111 первой грузовой единицы 101 в сторону стопорного элемента 114 (Фигуры 7C-7G), когда первая грузовая единица 101 перемещается по траектории скольжения 109. Первая грузовая единица 101 содержит скользящий элемент 111, примерное описание которого приводится в пояснениях к Фигуре 4В. Скользящий элемент 111 перемещается по траектории скольжения 109 до момента его отклонения отклоняющим элементом 113 так, чтобы скользящий элемент 111 касался запорного элемента 112 и таким образом останавливал скольжение.
Более подробно, положение запорного элемента 112 можно изменить относительно второй грузовой единицы 102 предпочтительно в направлении 119 так, чтобы отклоняющий элемент 113 отклонял скользящий элемент 111, когда центр тяжести первой грузовой единицы 101 проходит через второй торец 102В второй грузовой единицы 102, при этом первый торец 101А, а значит и скользящий элемент 111, приподнимается и прижимается к стопорному элементу 114. Запорный элемент может содержать несколько составных элементов 114, как в верхней, так и в нижней частях траектории скольжения 109.
Первая грузовая единица 101 может скользить дальше относительно второй грузовой единицы 102 в направлении 119, когда скользящий элемент 111 пройдет стопорные элементы 114, например, при перемещении первого торца 101А, а также скользящего элемента 111, согласно описанию в настоящем документе, и в частности на Фигурах 7C-7G.
Стопорный элемент 112 может содержать также и амортизирующее устройство 118 для поглощения кинетической энергии первой грузовой единицы 101, возникающей при остановке первой грузовой единицы.
Также, вторая грузовая единица 102 может содержать входной элемент 115 в конечной части второго торца 102В второй грузовой единицы 102, согласно описанию, и в частности на Фигуре 7Н. Входной элемент 115 предназначен для введения первого торца 101А первой грузовой единицы 101 в посадочное устройство 106. Для этой цели, входной элемент 115 может включать в себя, например, отклоняющий элемент 117, который будет направлять первый торец 101А первой грузовой единицы 101 или скользящий элемент 111 первой грузовой единицы 101 так, чтобы обеспечивался лучший контакт с посадочным устройством 106.
Фигуры 8А-8С иллюстрируют примеры грузовых единиц 101, 102 в соответствии с другим вариантом осуществления изобретения, при этом на Фигуре 8А приводится иллюстрация вида сбоку одной грузовой единицы 101. На Фигуре 8В показана первая грузовая единица 101, установленная или погруженная поверх второй грузовой единицы 102 при помощи траектории скольжения 109. Фигура 8С иллюстрирует вид спереди уложенных грузовых единиц 101, 102, где также показан тормозной элемент 107 посадочной системы.
Пояснения по данному изобретению даны выше со ссылкой на указанные выше варианты осуществления, кроме того, были продемонстрированы некоторые преимущества данного изобретения. Совершенно очевидно, что данное изобретение не ограничивается упомянутыми выше вариантами осуществления, но включает в себя все возможные варианты осуществления, соответствующие духу и содержанию идеи изобретения и формулы изобретения далее. Например, трос демонстрируется только для примера в качестве тормозного элемента 107 и системы 108, также могут применяться и другие типы подходящих устройств, таких как ремень, стропа или цепь.
Также, несмотря на то, что на фигурах изображены только две грузовые единицы, они приводятся только для примера, поскольку более двух грузовых единиц могут быть установлены одна поверх другой для перевозки. Далее следует отметить, что даже при том, что грузовые единицы, изображенные на Фигурах, имеют боковые и(или) торцевые стенки, эти боковые и(или) торцевые стенки не имеют критического значения, поскольку грузовые единицы могут быть выполнены в виде платформы, имеющей только торцы (101А, 101В, 102А, 102В) и не имеющей никаких стенок.
Признаки, перечисленные в зависимых пунктах формулы изобретения, могут свободно сочетаться в любой комбинации, если не указано иное условие.
Реферат
Изобретение относится к замене грузовых единиц, перевозимых на транспортном средстве. Система замены, по меньшей мере, первой (101) и второй (102) грузовых единиц, перевозимых на транспортном средстве (103), содержит посадочное устройство (106), устанавливаемое между первым торцом (101A) первой (101) грузовой единицы и вторым торцом (102B) второй (102) грузовой единицы так, чтобы первая часть упомянутого посадочного устройства опиралась на первый торец (101A) первой (101) грузовой единицы, а вторая часть упомянутого посадочного устройства опиралась на второй торец (102B) второй (102) грузовой единицы. Посадочное устройство (106) выполнено с возможностью перемещения упомянутого первого торца (101A) первой (101) грузовой единицы на более низкий уровень, чем второй торец (102B) второй (102) грузовой единицы, после того как упомянутый первый торец (101A) первой (101) грузовой единицы коснулся второго торца (102B) второй (102) грузовой единицы. Изобретение обеспечивает легкий и экономичный по времени процесс замены контейнеров, особенно в условиях ограниченного пространства, при котором транспортное средство, используемое для транспортировки контейнеров, неподвижно в процессе замены грузов. 4 н. и 18 з.п. ф-лы, 33 ил.
Формула

Комментарии