Устройство для подъема и опускания груза - SU1405694A3
Код документа: SU1405694A3
Чертежи


Описание
30
ел
О5
со
4
О
Изобретение относится к устройствам для перемещения тяжелых грузов.
Цель изобретения - повышение надежности .
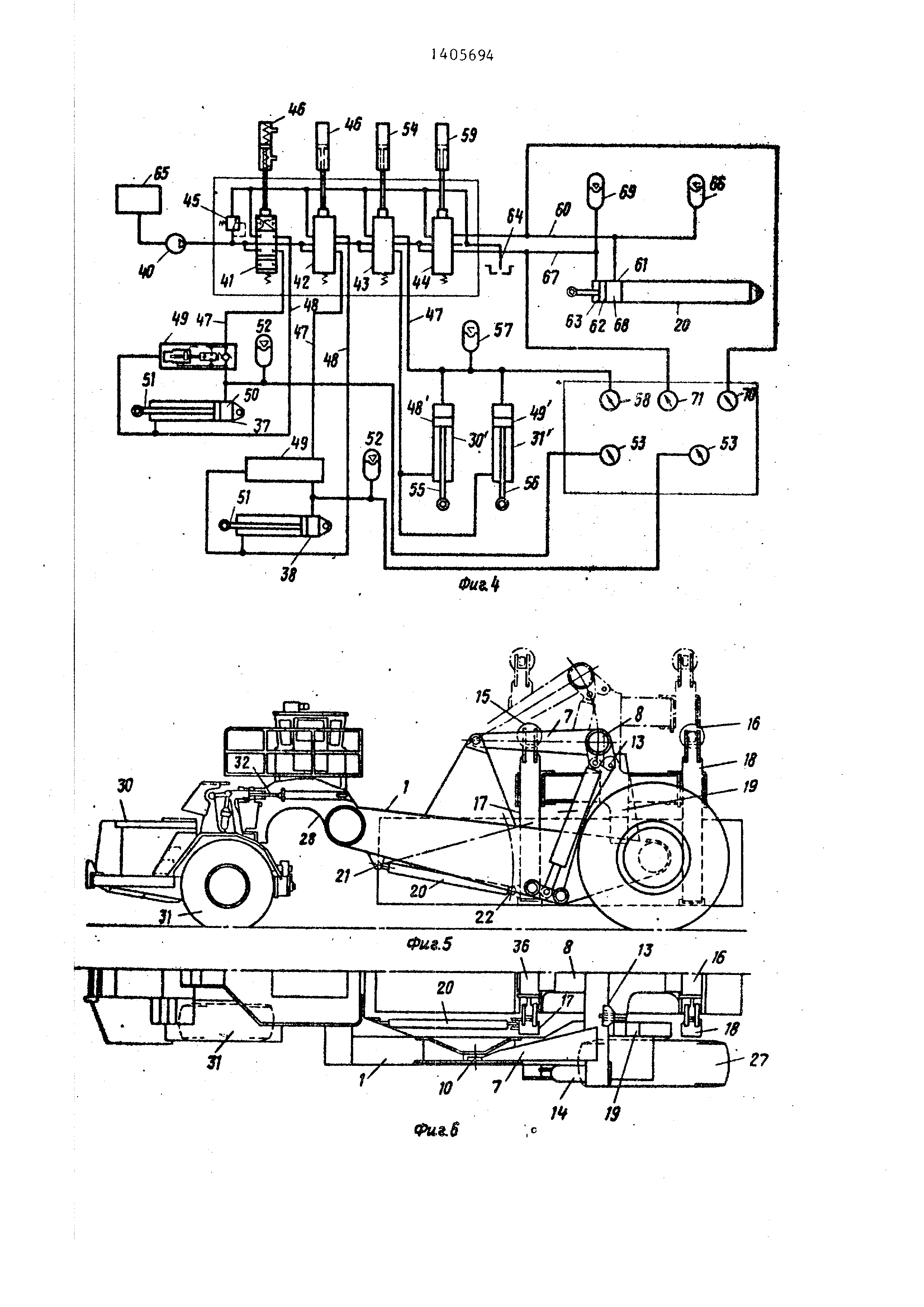
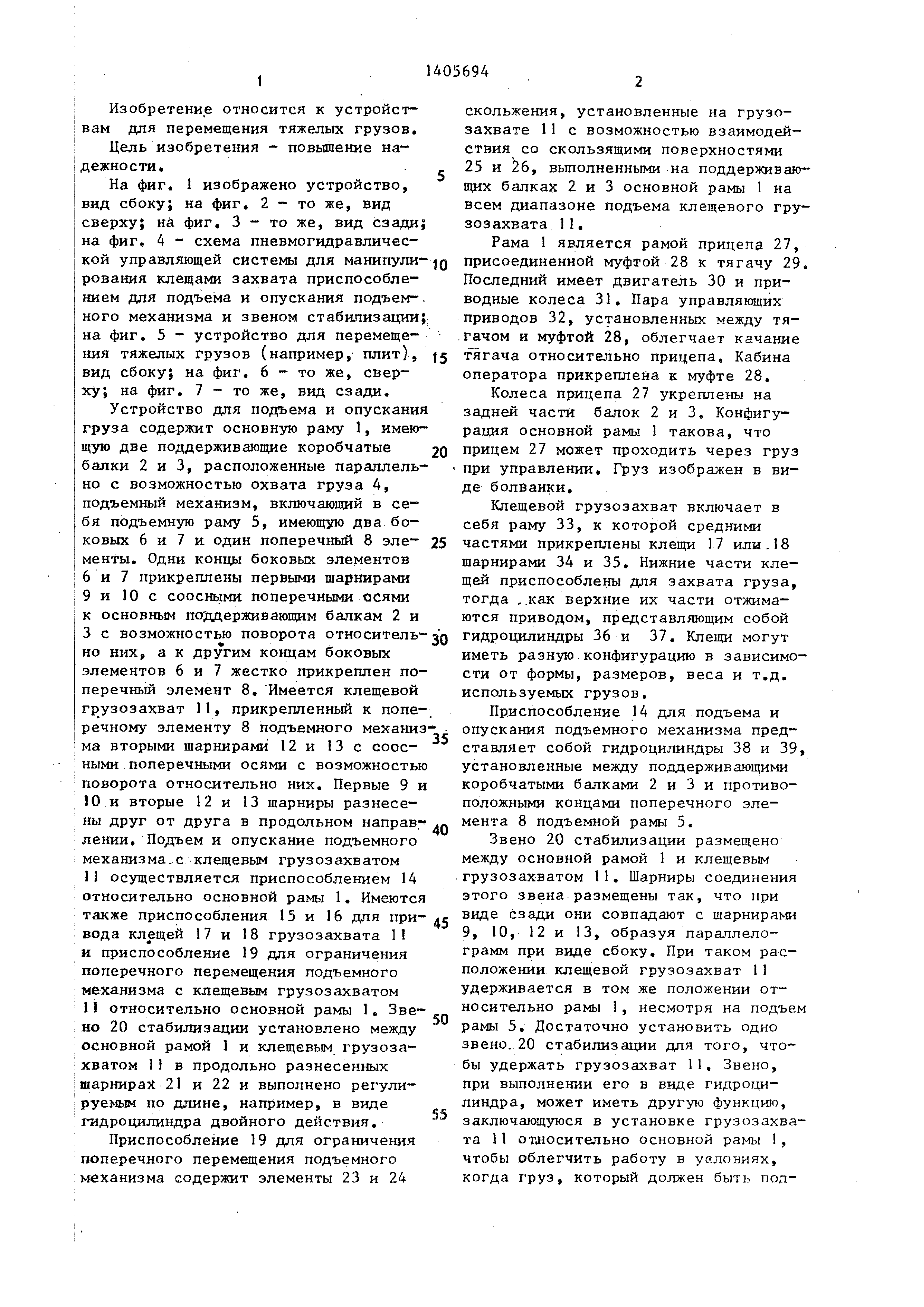
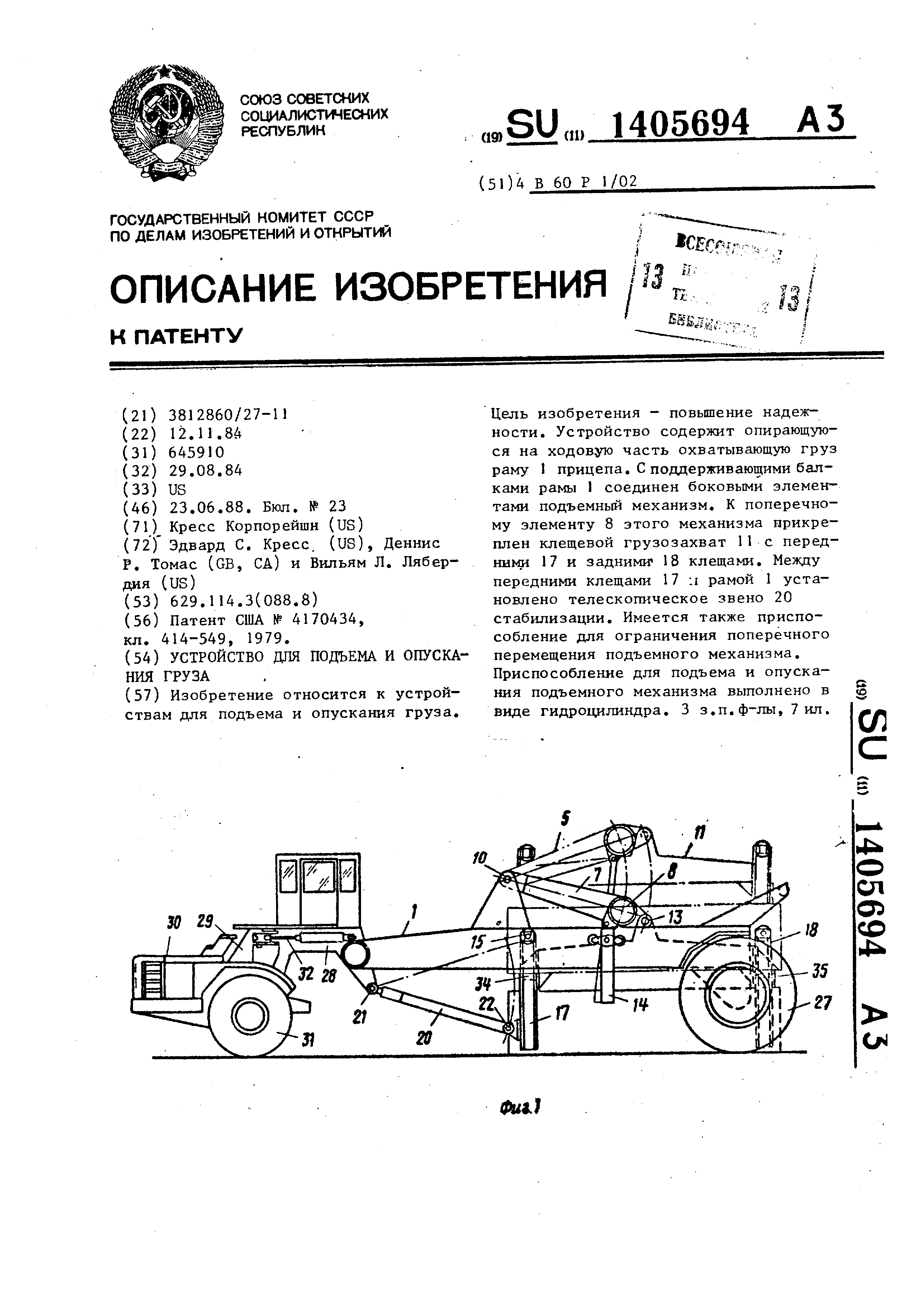
На фиг, 1 изображено устройство, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг, 3 - то же, вид сзади; на фиг, 4 - схема пневмогидравлической управляющей системы для манипулирования клещами захвата приспособлением для подъема и опускания подъем-. ного механизма и звеном стабилизации; на фиг, 5 - устройство для перемещения тяжелых грузов (например, плит), вид сбоку; на фиг, 6 - то же, сверху; на фиг, 7 - то же, вид сзади.
Устройство для подъема и опускания груза содержит основную раму I, имеющую две поддерживающие коробчатые балки 2 и 3, расположенные параллельно с возможностью охвата груза 4, подъемный механизм, включающий в себя подъемную раму 5, имеющую два боковых 6 и 7 и один поперечный 8 элементы . Одни концы боковых элементов 6 и 7 прикреплены первыми шарнирами
9и 10 с сооснь1ми поперечными осями к основным поддерживающим балкам 2 и 3 с возможностью поворота относительно них, а к другим концам боковых элементов 6 и 7 жестко прикреплен поперечный элемент 8, Имеется клещевой грузозахват 11, прикрепленньй к поперечному элементу 8 подъемного механиз ма вторыми шарнирами 12 и 13 с соос- ными поперечными осями с возможностью поворота относительно них. Первые 9 и
10и вторые 12 и 13 шарниры разнесены друг от друга в продольном направо лении. Подъем и опускание подъемного механизма.с клещевым грузозахватом
П осуществляется приспособлением 14 относительно основной рамы 1, Имеются также приспособления 15 и 16 для привода клещей 17 и 18 грузозахвата 11 и приспособление 19 для ограничения поперечного перемещения подъемного механизма с клещевым грузозахватом
11относительно основной рамы 1. Звено 20 стабилизации установлено между основной рамой 1 и клещевьзм грузозахватом 1 1 в продольно разнесенных шарнирах 21 и 22 и выполнено регулируемым по длине, например, в виде гидроцилиндра двойного действия.
Приспособление 19 для ограничения поперечного перемещения подъемного механизма содержит элементы 23 и 24
5
0
5
0
5
0
5
0
5
скольжения, установленные на грузо- захвате 11 с возможностью взаимодействия со скользящими поверхностями 25 и 26, вьшолненными на поддерживающих балках 2 и 3 основной рамы 1 на всем диапазоне подъема клещевого грузозахвата 11,
Рама 1 является рамой прицепа 27, присоединенной муфтой 28 к тягачу 29, Последний имеет двигатель 30 и приводные колеса 31, Пара управляющих приводов 32, установленных между тя- .гачом и Муфтой 28, облегчает качание тягача относительно прицепа. Кабина оператора прикреплена к муфте 28,
Колеса прицепа 27 укреплены на задней части балок 2 и 3, Конфигурация основной рамы 1 такова, что прицем 27 может проходить через груз при управлении. Груз изображен в виде болванки.
Клещевой грузозахват включает в себя раму 33, к которой средними частями прикреплены клещи 17 или , 18 шарнирами 34 и 35, Нижние части клещей приспособлены для захвата груза, тогда , .как верхние их части отжимаются приводом, представляющим собой гидроцилиндры 36 и 37, Клещи могут иметь разную.конфигурацию в зависимости от формы, размеров, веса и т,д, используемых грузов.
Приспособление 14 для подъема и опускания подъемного механизма представляет собой гидроцилиндры 38 и 39, установленные между поддерживающими коробчатыми балками 2 и 3 и противоположными концами поперечного элемента 8 подъемной рамы 5.
Звено 20 стабилизации размещено между основной рамой 1 и клещевым грузозахватом 11, Шарниры соединения этого звена размещены так, что при виде сзади они совпадают с шарнирами 9, 10, 12 и 13, образуя параллелограмм при виде сбоку. При таком расположении клещевой грузозахват 11 удерживается в том же положении относительно рамы 1, несмотря на подъем рамы 5, Достаточно установить одно звено. 20 стабилизации для того, чтобы удержать грузозахват 11, Звено, при выполнении его в виде гидроцилиндра , может иметь другую функцию, заключающуюся в установке грузозахвата 11 отлосительно основной рамы 1, чтобы облегчить работу в уаловиях, когда груз, который должен быть поднят , находится не в той же горизонтальной плоскости, что и транспортное средство, как может произойти на неровной поверхности, В таком случае способность изменить длину звена 20 и, следовательно, положение гру- зозахвата 11 относительно основной рамы 1 может быть полезно.
Изменяемая длина звена 20 может также служить для поглощения ударов при соединении с пневмогидравличес- ким аккумулятором в пневмогидравли- ческой управляющей системе (фиг.4) . С таким устройством по крайней мере часть ударной нагрузки, произведенной, например, при удержании одним захватом на грузе, может быть поглощена аккумулятором быстрее, чем она пере- . дается через з.вено раме.
Рассмотрим рлучай,.когда груз, например стальная плита, поднимается и цилиндр з.вена стабилизации установлен так, что получается параллелограмм (фиг. 1). После этого при необходимости цилиндр звена настраивают так, чтобы удержать плиту в нужном положении относительно земли, несмотря на высоту, на которую поднят груз Предполагается небольшая нагрузка пр установке положения, так как устройство .параллелограмма автоматически поддерживает нужное положение.
Устройство управляется системой управления (фиг. 4).
Предполагается ручное управление пневматикой, чтобы по выбору приводить в действие цилиндры 38 и 39 по;р емной рамы, цилиндр 37 привода задних клещей, цилиндр 36 привода передних клещей и цилиндр 20 стабилизации .
Гидравлический насос 40 (фиг. 4) подает гидравлическую жидкость под давлением к четырем трехпозиционным золотниковым клапанам 41-44, которые независимо управляют работой привод- ных цилиндров. Клапан 45 сброса, расположенный между выходом насоса и золотниковыми клапанами 41-44, ограничивает давление в системе.
Трехпозиционный гидравлический золотниковый клапан 41, связанный с цилиндром 37,.нормально удерживается в отключенном положении посредством пневматического флюгерного цилиндра А6 двойного действия, центрированног пружиня. Пневматический клапан ручного д. йствия (не показан) может
по выбору приводиться в действие для того, чтобы подать сжатый воздух в одну из частей флюгерного цилиндра 46, сдвигая внутренний поршень и в свою очередь приводя в движение гидравлический золотниковый клапан 41. Под давлением от насоса 40 гидравлическая жидкость, которая нормально
0 проходит через клапан 41 и может попасть в любой из последовательных клапанов 42-44, когда первый в нейтральном положении, прохддит через золотниковый клапан 41 по любой ли5 НИИ 47 или 48 в зависимости от того, надо ли осуществить сжатие или разжатие соответструющих клещей. Когда линия 47 под давлением, гидравлическая жидкость подается в узел контрольно-
0 го клапана 49 (показан схематически) перед цилиндром 37. Сжатая жидкость в линии 47 может свободно проходить через контрольный клапан 49 в камеру 50 цилиндра, но может выйти оттуда
5 только когда давление в линии 48 превысит давление в линии 47 на опреде- ле нный минимум. Это гарантирует от нечаянного разжатия груза, что может произойти, когда золотниковый клапан
0 41 возвращается в свое нейтральное положение или в случае гидравлического повреждения выше контрольного клапана 49.
Поток сжатой гидравлической жидкоg сти в камеру 50 гидравлического цилиндра 37 заставляет шток 51 повернуться влево (фиг. 4), который в свою очередь заставит сжаться.задние клещи 18 (фиг. 1). После того, как
0 груз захвачен, при отсутствии давления в линии 48, жидкость в камере 50 удерживает шток 51 выдвинутым, Пнев- могидравлический аккумулятор 52 подключен между контрольным клапаном 49
5 и цилиндром 37, чтобы обеспечивать функцию поглощения удара и давление в камере 50. Измеритель 53 давления в кабине оператора может использоваться для визуального указания давQ ления захвата.
Гидравлическая система, связанная с работой цилиндра передних клещей 17, аналогична цилиндру задних клещей 18.
е в системе управления цилиндры 30 и 3l управляются одним пневматическим клапаном (не показан) ручного привода , который управляет флюгерным цилиндром 54, воздействующим на гидравлический золотниковый клапан 43, Для операции подъема линия 47 заполняется гидравлической жидкостью, которая проходит через клапан 43 и направляется в цилиндры ЗО и . Давление гидравлической жидкости воздействует .на поршни 48 и 49, заставляя одновременно выдвигать штоки 55 и 56,
Параллельное расположение цилиндров 38 и 39 может быть в случае, . когда груз, который неравномерно распределен от стороны к стороне, нерав номерно заставляет выдвигать штоки 55 и 56, Это может легко привести к ограничению величины скручивания подъемной рамы. Так как цилиндры 38 и 39 соединены, втягивание их штоков под действием веса груза или умьпилен ного, или в результате неожиданного нарушения гидравлики будет одновременным . Пневмогидравлический аккумулятор 57 подобно аккумулятору 52 обеспечивает функцию поглощения удара, когда транспортное средство перемещает , груз по неровной поверхности. Величина давления на индикаторе 58 в кабине оператора показывает давление в подъемных цилиндрах, обеспечивая индикацию величины груза.
Операция настройки звена 20, При управлении захватывающих и подъемных цилиндров вручную управляемый пневматический клапан (не показан) подае сжатый воздух во флюгерный цилиндр 59, чтобы селективно задействовать гидравлический золотниковый клапан- 44. Чтобы увеличить длину звена 20, линия 60 становится под давлением гидравлической жидкости, которая проходит через клапан 44, Гидравличес- кая жидкость входит в звено 20 через вход 61 и воздействует на поршень 62, чтобы переместить его влево (фиг, 4). Гидравлическая жидкость, оказавшая давление из камеры 63, когда поршень 62 перемещается влево, возвращается через золотниковый клапан 44 в линию возврата 64 гидравлического резервуара 65, Пневмогидравлический аккумулятор 66 связан с линией 60, чтобы погло гить любые волны гидравлического давления из-за неосторожного удара на клещевом грузо- захвате 11, будучи переданным как сила давления на звено 20,
Аналогичным образом длина звена 2 может быть укорочена при активизации золотникового клапана 44, чтобы поднять давление в (литчии 67, Когда гидравлическая жидкость под давлением заполняет камеру 63, поршень 62 пе- ремещается вправо и воздействует на жидкость в камере 68, чтобы возвратить по линии 60 через золотниковый клапан 44 в резервуар 65, Пневмогидравлический аккумулятор 69 связан с
линией 67, чтобы поглотить , которые передаются звену 20, как растягивающие силы.
Измерители 70 и 7 давления могут быть расположены в кабине оператора
для визуальной индикации гидравлического давления в линиях 60 и 67 соответственно. Так как цель звена 20 заключается в том, -чтобы поддерживать клещевой трузозахват и груз
в положении, которое они стремятся принять под действием тяжести, в идеальном случае не должно быть сжатия .или растяжения. При таких обстоятельствах давление на указателях 70 и 71
должно быть одинаковым - около нуля. Если давления на указателях 70 и 71 значительно отличаются, неверно отба- лансированньй груз регулируют. Формула изобретения
1 о Устройство для подъема и опускания груза ,содержащее основную раму, имеющую две поддерживающие балки, расположенные параллельно с возможностью охвата груза, подъемный механизм , включающий в себя подъемную раму , имеющую два боковых и один попе- речньй злементы, причем одни кГбнцы боковых элементов прикреплены первыми щарнирами с соосными поперечными
осями к основным поддерживающим балкам с возможностью поворота относительно них, а к другим концам боковых элементов жестко прикреплен поперечный злемент - клещевой грузазахват , прикрепленный к поперечному элементу подъемного механизма вторыг ми шарнирами с соосными поперечными осями с возможностью поворота относительно них, причем первые и вторые
шарниры разнесены друг.от друга в продольном раправлении, приспосойл.е- ние для подъема и опускания подъемного механизма с клещевым грузозахва- том относительно основной рамы, при-
способление для привода клещей и приспособление для ограничения поперечного перемещения подъемного механизма с клещевым, грузозахватом относительно основной рамы, о т л и чающееся тем, что, с целью повышения надежности, оно снабжено звеном стабилизации груза, концы которого установлены между основной рамой и клещевым грузозахватом в продольно разнесенных шарнирах, образующих с первыми и вторыми шарнирами параллелограмм при виде сбоку.
2. Устройство по п, 1, отличающееся . тем, что приспособление для ограничения поперечного перемещения подъемного механизма.содержит пару элементов скольжения.
установленных на клещевом грузозахва- те с возможностью взаимодействия со скользящими поверхностями, выполнен- ными на поддерживающих балках основной рамы на всем диапазоне подъема клещевого грузозахвата.
3.Устройство по п. 1, отличающееся тем, что звено стабилизации выполнено регулируемым, по длине.
4.Устройство по пп. 1 и 3, -о т - личающееся тем, что звено стабилизации представляет собой гидроцилиндр двухстороннего действия.


Реферат
Изобретение относится к устройствам для подъема и опускания груза. Цель изобретения - повышение надежности . Устройство содержит опирающуюся на ходовую часть охватывающую груз раму 1 прицепа. С поддерживающими балками рамы 1 соединен боковыми элементами подъемный механизм. К поперечному элементу 8 этого механизма прикреплен клещевой грузозахват 11с передники 17 и задними 18 клещами. Между передними клещами 17 и рамой 1 установлено телескопическое звено 20 стабилизации. Имеется также приспособление для ограничения поперечного перемещения подъемного механизма. Приспособление для подъема и опускания подъемного механизма выполнено в виде гидроцилиндра. 3 з. п. ф-лы, 7 ил. § СУЗ
Формула
Комментарии