Массажная система для кресла транспортного средства - RU149358U1
Код документа: RU149358U1
Чертежи






Описание
Область техники, к которой относится полезная модель
Полезная модель относится к массажной системе кресла для транспортного средства и, в частности, к способу и системе управления массажным устройством кресла на основании местоположения транспортного средства или характеристик местонахождения.
Уровень техники
Кресла для транспортных средств становятся все более приспособленными для обеспечения комфорта пассажира в различных условиях окружающей среды и с учетом многочисленных предпочтений водителя и пассажиров. При этом число устройств, обеспечивающих комфорт пассажира или водителя и зачастую требующих взаимодействия с пользователем или приводимых в действие пользователем, также возросло. Современные кресла для транспортных средств иногда приспособлены для выполнения функций массажа, которые имеют различные настройки и выполняют различные типы массажа.
Подобная массажная система известна, например, из публикации патентной заявки WO 100132 от 4.01.2001, которая может быть выбрана в качестве ближайшего аналога полезной модели.
Однако данные системы не приспособлены для автоматической активации выбранных настроек массажа в тот момент, когда это необходимо водителю, которому нужно отвлекаться от дороги для активации массажной системы и выбора параметров и типа массажа во время движения.
Следовательно, необходимо разработать систему, которая обеспечит отсутствие указанных неудобств пассажира или водителя.
Раскрытие полезной модели
Техническим результатом полезной модели является обеспечение автоматического запуска и управления массажным устройством тогда, когда это необходимо, в соответствии с параметрами движения транспортного средства и заранее заданными характеристиками. Система не допускает появления негативных эффектов, вызванных недостатком мышечной активности и нарушением кровообращения, таких как боль или онемение мышц бедер и поясницы пассажира или водителя.
Для обеспечения указанного эффекта предложена массажная система для кресла транспортного средства, которая включает в себя кресло с массажным устройством, устройство позиционирования для определения местоположения транспортного средства и контроллер для управления массажным устройством на основании установленного местоположения транспортного средства.
Контроллер может быть выполнен с возможностью использовать картографические данные для формирования характеристики местонахождения на основании установленного местоположения транспортного средства.
Характеристика местонахождения может представлять собой классификацию по типу дороги, в зависимости от которой контроллером могут быть отрегулированы параметры работы массажного устройства.
Параметры работы массажного устройства могут быть отрегулированы контроллером на основании прогнозируемого маршрута, сформированного устройством позиционирования на основании картографических данных и установленного местоположения транспортного средства.
Массажная система также может включать в себя пользовательский интерфейс для задания настроек массажа, причем контроллер функционально соединен с пользовательским интерфейсом и массажным устройством и выполнен с возможностью управлять массажным устройством на основании заданных настроек массажа.
Настройки массажа могут включать в себя условие активации, которое представляет собой заданное непрерывное время в пути по дороге заданного типа, причем контроллер выполнен с возможностью активировать массажное устройство по истечении этого времени.
Настройки массажа могут включать в себя пользовательские параметры массажа, которые предпочтительно представляют собой выбранную зону охвата, причем контроллер выполнен с возможностью активировать массажное устройство для работы в соответствии с выбранными параметрами.
В другом варианте предложена массажная система для транспортного средства, которая включает в себя массажер, установленный в кресле, датчик для определения характеристик местонахождения транспортного средства, и контроллер для автоматической активации массажера в кресле на основании полученных от датчика данных.
Массажная система может дополнительно включать в себя память для сохранения полученных от датчика характеристик местонахождения в файле данных при активации массажера вручную, причем контроллер может быть выполнен с возможностью идентифицировать повторяющуюся характеристику местонахождения в файле данных и автоматически активировать массажер, когда установленная характеристика местонахождения соответствует этой повторяющейся характеристике.
Характеристика местонахождения может представлять собой положение транспортного средства на дорожной полосе, причем контроллер может быть выполнен с возможностью управлять массажным устройством на основании положения транспортного средства на дорожной полосе.
Датчик может представлять собой GPS-приемник для определения местоположения транспортного средства, а контроллер может быть выполнен с возможностью формировать характеристику местонахождения на основании полученной от датчика информации о местоположении транспортного средства.
Контроллер может быть выполнен с возможностью использовать запрограммированный маршрут для формирования характеристики местонахождения на основании местоположения транспортного средства.
Контроллер также может быть выполнен с возможностью осуществлять доступ к картографическим данным с целью определения ситуации дорожного движения на основании местоположения транспортного средства, и управлять массажером на основании ситуации дорожного движения.
Краткое описание чертежей
Фиг.1 представляет собой общий вид сверху внутренней части транспортного средства, показывающий кресло водителя, кресло пассажира и центральную консоль с экраном;
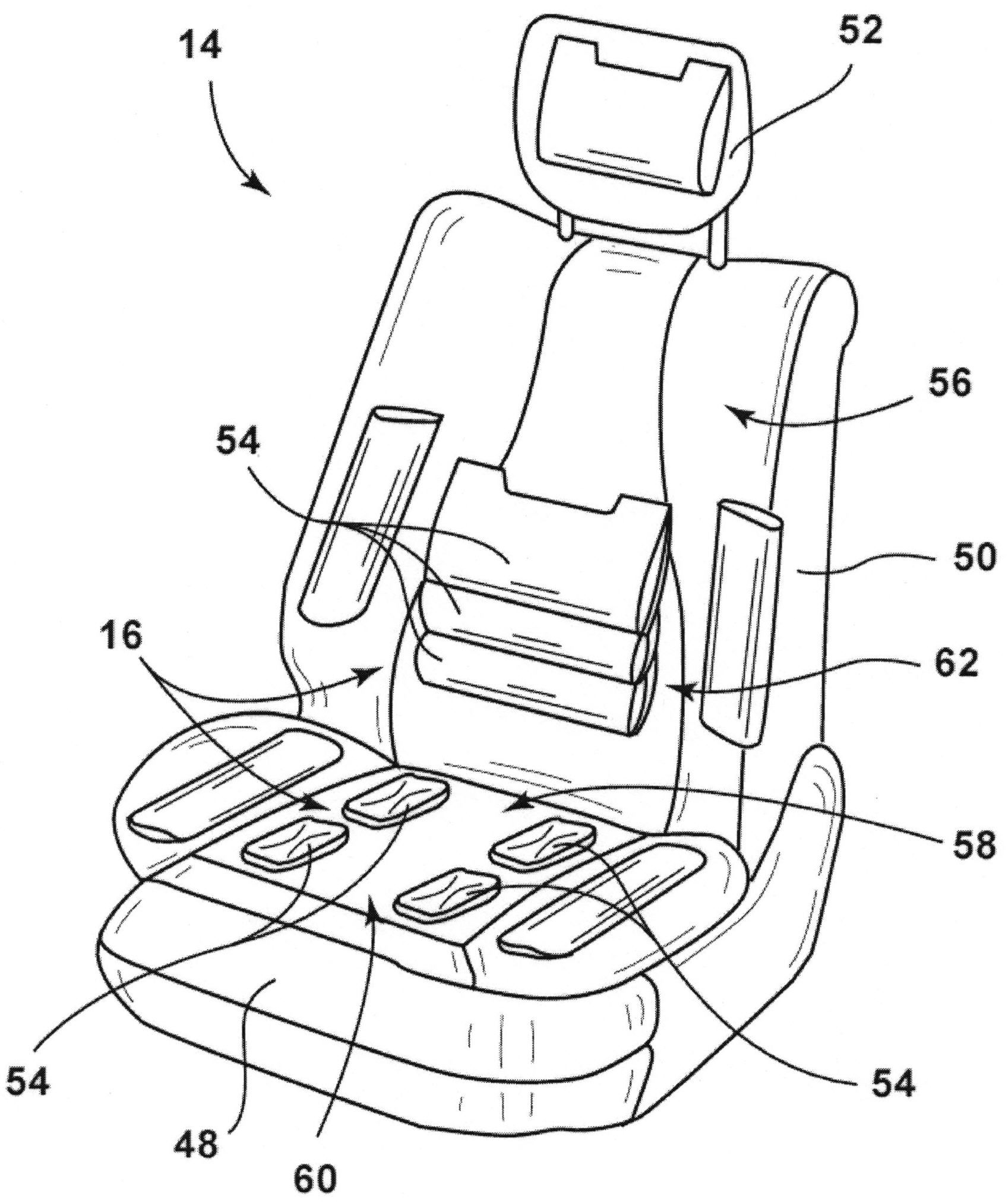
Фиг.2 представляет собой общий вид сверху кресла для транспортного средства, имеющего массажное устройство;
Фиг.3 представляет собой блок-схему массажной системы кресла;
Фиг.4 представляет собой изображение транспортного средства на карте;
Фиг.5 представляет собой логическую схему способа управления массажером, установленным в кресло для транспортного средства;
Фиг.6 представляет собой изображение пользовательского интерфейса, показывающего меню настроек для массажера, установленного в кресле;
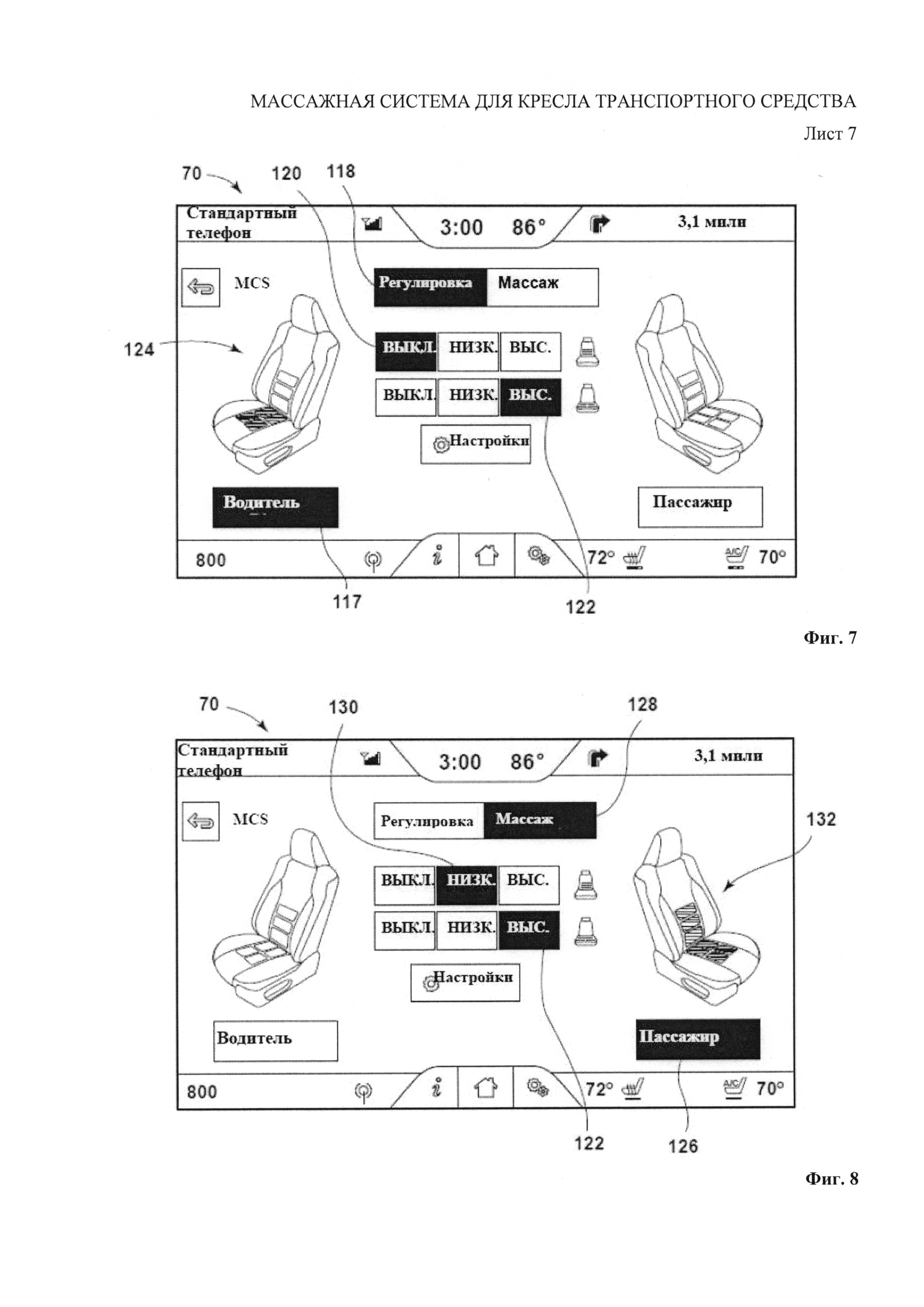
Фиг.7 представляет собой изображение пользовательского интерфейса, показывающего один вариант массажных параметров для массажера, установленного в кресле;
Фиг.7B представляет собой изображение пользовательского интерфейса, показывающего другой вариант массажных параметров для массажера, установленного в кресле.
Осуществление полезной модели
Термины «верхний», «нижний», «правый», «левый», «задний», «передний», «вертикальный», «горизонтальный» и их производные, использованные в описании, относятся к расположению устройства, изображенного на Фиг.1. Однако необходимо понимать, что элементы устройства могут иметь и другие ориентации, если явно не указано иное. Также следует понимать, что конкретные устройства и процессы, изображенные на сопроводительных чертежах и описанные далее, приведены в качестве примера реализации концепции полезной модели. При этом конкретные размеры и прочие физические характеристики, относящиеся к описанным вариантам воплощения, не должны рассматриваться в качестве ограничения, если явно не указано иное.
На Фиг.1-8 ссылочная позиция 10 в общем случае относится к массажной системе кресла для транспортного средства 12. Массажная система 10 включает в себя кресло 14 для транспортного средства, имеющее массажное устройство 16. Устройство 18 позиционирования определяет местоположение транспортного средства 12. Контроллер 20 управляет массажным устройством 16 на основании установленного местоположения транспортного средства 12. Транспортное средство 12, изображенное на Фиг.1, представляет собой автомобиль, однако оно может быть также лодкой, самолетом или другим транспортным средством.
Как показано на Фиг.1, внутренняя часть 22 транспортного средства 12 включает в себя водительскую сторону 24 и пассажирскую сторону 26, на каждой из которых установлено кресло 14 с массажным устройством 16. Центральная консоль 28 расположена спереди от кресел 14 и между перчаточным ящиком 30 на пассажирской стороне 26 и рулем 32 на водительской стороне 24. Центральная консоль 28 имеет несколько кнопок 34 и экран 36, совместно называемые бортовым пользовательским интерфейсом 38, который предназначен для использования пассажиром или водителем, сидящим в кресле 14 либо на водительской стороне 24, либо на пассажирской стороне 26. Руль 32 также имеет нажимную кнопку 40 для водителя, которая позволяет управлять бортовым пользовательским интерфейсом 38. Кроме того, предусмотрено, что другие кнопки, предназначенные для управления бортовым пользовательским интерфейсом 38, могут быть установлены на внутренней поверхности 42 двери транспортного средства 12, боковой части 44 кресла 14 или в других возможных местах внутренней части 22 транспортного средства 12.
Экран 36, показанный на Фиг.1, имеет функцию сенсорного дисплея для обеспечения взаимодействия с пользователем; однако предусмотрено, что эта функция может отсутствовать, и управление бортовым пользовательским интерфейсом 38 может быть преимущественно осуществлено с помощью нескольких кнопок 34 и других устройств ввода. Экран 36 может быть также расположен рядом с зоной 46 приборной панели или других местах в транспортном средстве 12, видимых для сидящего в кресле пассажира или водителя. Также предполагается, что экран 36, в качестве альтернативы или дополнительно, может содержать другие средства отображения, или визуальные или звуковые индикаторы выбранных и вводимых параметров бортового пользовательского интерфейса 38. Кроме того, в качестве альтернативы транспортное средство 12 может содержать одно или несколько кресел с массажным устройством 16, установленных в том числе в среднем или заднем рядах транспортного средства 12.
Как показано на Фиг.2, кресло 14 для транспортного средства имеет сиденье 48, шарнирно соединенное со спинкой 50, которая проходит вверх для обеспечения опоры для подголовника 52. Массажное устройство 16 включает в себя несколько массажеров 54, установленных в кресле и расположенных в различных местах, прилегающих к опорной поверхности 56 кресла 14 для взаимодействия с сидящим пассажиром или водителем. Каждый массажер 54, установленный в кресле, имеет одну пневматическую камеру, которая может независимо от других пневматических камер быть надута и сдута с различной скоростью и последовательностью для выполнения массажа сидящего пассажира или водителя. Как показано на Фиг.2, сиденье 48 содержит массив из четырех массажеров 54, установленных в кресле, из которых два расположены рядом с задней частью 58 сиденья 48, а два расположены рядом с передней частью 60 сиденья 48. Спинка 50 также содержит три наложенных друг на друга (в продольном направлении) массажера 54, установленных в кресле рядом с поясничной зоной 62 спинки 50 кресла. Предполагается, что массажное устройство 16 может быть в качестве варианта расположено на кресле 14 и может включать в себя меньшее или большее количество массажеров 54. Также можно предположить, что массажеры 54, установленные в кресле, могут в качестве альтернативы или дополнительно включать в себя массажный прибор с электроприводом, тепловой массажный прибор или другие массажные приборы, как это обычно понимают в данной области техники.
В варианте реализации, представленном на Фиг.3, контроллер 20 массажной системы 10 кресла включает в себя микропроцессор 64 и память 66. Однако контроллер 20 может также представлять собой часть общего контроллера, применяемого для других целей, либо иметь несколько микропроцессоров и запоминающих устройств, встроенных в различные места или компоненты, являющиеся частью транспортного средства 12, или отдельно от транспортного средства 12. Память 66 может включать в себя оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM) и электрически стираемое программируемое постоянное запоминающее устройство (EEPROM). Как показано на Фиг.3, контроллер 20 получает входные сигналы с различных компонентов, включая устройство 18 позиционирования, датчик 68 транспортного средства и пользовательский интерфейс 70, в том числе бортовой пользовательский интерфейс 38, показанный на Фиг.1, и отправляет выходные управляющие сигналы на массажное устройство 16, включающее несколько массажеров 54, установленных в кресле (Фиг.2). Предполагается, что контроллер 20 может также получать входные сигналы от дополнительных компонентов, например, другие сигналы от шины сети локальных контроллеров (CAN), установленной в транспортном средстве 12.
Устройство 18 позиционирования, как показано на Фиг.3, включает в себя приемник глобальной системы позиционирования (GPS), который вычисляет местоположение транспортного средства 12. GPS-приемник, установленный на транспортном средстве 12, может быть либо встроен в другие электрические компоненты транспортного средства 12, либо находиться в мобильном устройстве, таком как смартфон, планшетный компьютер или другое портативное устройство, расположенное внутри транспортного средства 12 и имеющее связь с контроллером 20. Устройство 18 позиционирования или контроллер 20 могут также включать в себя функцию навигации счислением пути или другие функции навигации для обеспечения точного вычисления местоположения транспортного средства 12 GPS-приемником, включая ситуации, когда на GPS-приемник подают слабый сигнал. Также предполагается, что устройство позиционирования может включать в себя в качестве дополнительного или альтернативного варианта датчик, получающий сигналы от GPS-приемника с целью определения местоположения транспортного средства.
После получения сигнала о местоположении транспортного средства от устройства 18 позиционирования контроллер 20 осуществляет доступ к картографическим данным 72, хранящимся в памяти 66. Картографические данные 72 могут включать в себя данные о дорогах, адресах, дорожном движении, объектах инфраструктуры и другие данные, связанные с картами. Предполагается, что контроллер 20 осуществляет доступ к картографическим данным 72 или обновляет сохраненные картографические данные 72 при помощи соединения с сетью Интернет таким образом, чтобы данные о дорожном движении, а также другие картографические данные были актуальными. Также предполагается, что в качестве варианта к картографическим данным 72 может осуществлять доступ устройство 18 позиционирования или его часть. На основании обнаруженного местоположения транспортного средства и соответствующих картографических данных 72 контроллер 20 может сформировать по крайней мере одну характеристику местонахождения транспортного средства 12. Характеристикой местонахождения может быть тип дороги, геометрия дороги, положение на дорожной полосе, ситуация дорожного движения и прогнозируемый маршрут движения, а также другие возможные характеристики, связанные с окружающей средой и условиями вне транспортного средства 12. Тип дороги представляет собой общую классификацию дороги, по которой перемещается транспортное средство 12, например, городская улица, проселочная дорога, шоссе, автомагистраль и другие более общие или более конкретные классификации по типу дороги. Характеристика геометрии дороги может включать в себя вычисленное значение, например, количество поворотов на милю, и аналогичным образом также может включать в себя классификацию диапазонов вычисленного значения, например, прямая дорога, дорога с небольшими изгибами, извилистая дорога. Предусмотрено, что характеристики местонахождения могут включать в себя другие более конкретные или более общие данные, основанные на вычисленном местоположении транспортного средства 12. Кроме того, предполагается, что характеристика местонахождения, сформированная с помощью данных, полученных от устройства 18 позиционирования, может включать в себя вычисленную скорость транспортного средства 12.
Как показано на Фиг.4, прогнозируемый маршрут движения 76 транспортного средства 12, сформированный контроллером 20 (Фиг.3), может представлять собой характеристику местонахождения, а также может быть использован контроллером 20 для определения дополнительных характеристик местонахождения, таких как расчетное время, затраченное на прохождение определенного участка дороги, расчетная продолжительность поездки, время, затраченное на прохождение дороги конкретного типа и другие возможные характеристики местонахождения. Контроллер 20 может сформировать прогнозируемый маршрут движения 76 на основании нескольких переменных величин, включая повторяющиеся маршруты движения для транспортного средства 12, общий маршрут движения для других транспортных средств в аналогичном местоположении и какие-либо запрограммированные маршруты движения для транспортного средства 12 или устройства 18 позиционирования. Например, как показано на Фиг.4, транспортное средство 12 перемещается по первой дороге 74, являющейся преимущественно прямой. Прогнозируемый маршрут движения 76, вычисленный для транспортного средства 12, означает, что транспортное средство 12, вероятно, не повернет направо на вторую дорогу 78, но, вероятно, повернет направо на третью дорогу 80. Следовательно, контроллер 20 может использовать прогнозируемый маршрут движения 76 для того, чтобы изменить характеристику, относящуюся к геометрии дороги и определить ее как «извилистая дорога». Кроме того, контроллер 20 может вычислить расчетное время до того, как транспортное средство 12 повернет на третью дорогу 80 на основании местоположения транспортного средства, текущей скорости транспортного средства 12 и каких-либо ограничений скорости, действующих на первой дороге 74.
Датчик 68 транспортного средства, как показано на Фиг.3, может представлять собой одиночный датчик или несколько бортовых датчиков, которые независимо или совместно с другими датчиками или устройством 18 позиционирования определяют характеристику местонахождения транспортного средства 12. Датчики 68 могут включать в себя датчик скорости транспортного средства, направленный вперед датчик или камеру, резервный датчик или камеру, датчик или камеру удержания полосы движения, датчик подвески, инерционный датчик, датчик скорости рыскания и другие возможные бортовые датчики, которые могут определить местоположение или характеристику местонахождения транспортного средства 12, как это обычно понимают в данной области техники. Например, датчик подвески может обнаружить вибрацию, вызванную плохим качеством дороги, и классифицировать дорогу по типу. Направленный вперед датчик или камера, резервный датчик или камера и датчик или камера удержания полосы движения также могут определять количество и скорость других транспортных средств, окружающих транспортное средство 12, например, с целью определения ситуации дорожного движения. Кроме того, камеры могут определять количество полос или ширину дороги для того, чтобы классифицировать дорогу по типу.
Как также показано на Фиг.3, контроллер 20 управляет массажным устройством 16 кресла 14 транспортного средства на основании местоположения транспортного средства 12 и характеристик местонахождения, полученных от устройства 18 позиционирования и датчика 68 транспортного средства, как описано выше. Для управления массажным устройством 16 контроллер 20, как правило, использует процедуру 82, сохраненную в памяти 66. Один вариант процедуры 82 показан на Фиг.5 в виде логической схемы. Как показано на Фиг.5, на этапе 84 процедуры 82 массажная система 10 кресла включается при запуске транспортного средства 12, который может включать в себя запуск двигателя транспортного средства 12, переключение коробки передач транспортного средства 12 в режим движения, начало запрограммированного маршрута движения или другие соответствующие действия. Далее на этапе 88 процедура 82 загружает настройки 86, сохраненные в памяти 66 (Фиг.3) Настройки 86 включают в себя активацию и деактивацию функции автоматического запуска массажа, набор условий для начала выполнения функции автоматического запуска массажа и параметры массажа для функции автоматического запуска массажа. Также предполагается, что настройки 86 могут быть заданы по умолчанию и затем отрегулированы пользователем, как более подробно описано далее.
Как показано на Фиг.5, на этапе 90 процедуры 82 массажное устройство 16 переводится в режим «OFF» (ВЫКЛ.), если оно уже не находится в этом состоянии, перед тем, как процедура 82 определяет, активна ли функция автоматического запуска массажа. Соответственно, на этапе 92 контроллер 20 определяет на основании настроек 86 (Фиг.3), активна ли функция автоматического запуска массажа. Прежде чем перейти к этапу 94 процедуры 82, контроллер 20 продолжает осуществлять контроль настроек до тех пор, пока функция автоматического запуска массажа не будет активна. При активации функции автоматического запуска массажа на этапе 94 контроллер 20 (Фиг.3) обрабатывает входные данные, полученные от устройства 18 позиционирования, датчика 68 транспортного средства и других соответствующих устройств. Следует заметить, что контроллер 20 обрабатывает данные об установленном местоположении транспортного средства, характеристиках места нахождения транспортного средства 12, скорости транспортного средства, а также другие входные данные, связанные с местоположением. Контроллер 20 применяет эти данные совместно с условиями активации настроек 86 на этапе 96 с целью определить на основании входных сигналов, имеет ли место какое-либо из условий активации. Если условия активации отсутствуют, то контроллер 20 продолжает обрабатывать и отслеживать входные сигналы, включая сигналы о местоположении транспортного средства, характеристиках места нахождения и скорости транспортного средства, полученные от устройства 18 позиционирования и датчика 68 транспортного средства.
На Фиг.6 представлен один вариант пользовательского интерфейса 70, имеющий выбираемые элементы, позволяющие пассажиру или водителю изменить настройки 86 (Фиг.3) с настроек по умолчанию на пользовательские настройки. В частности на Фиг.6 показано меню 98 условий активации вместе с переключателем «ON» (ВКЛ.) или «OFF» (ВЫКЛ.) для включения функции автоматического массажа для каждого из условий активации. Три верхних пункта меню представляют собой условия активации, включающие в себя «In City» (В городе) 100, «Country Roads» (Проселочная дорога) 102 и «Highway» (Шоссе) 104, соответствующие классификации по типам дороги, которые могут быть определены на основании местоположения транспортного средства. Как указано выше, предполагается, что классификации по типам дороги могут быть отличны от тех, что представлены на Фиг.6. Меню 98 также содержит условие активации «>50 МРН» (>50 миль в час) 106, которое отслеживает скорость транспортного средства для случаев, когда измеренная скорость транспортного средства превышает пятьдесят миль в час. Однако данное условие может также в качестве варианта отслеживать характеристики местоположения транспортного средства 12, движущегося по дорогам с ограничениями скорости, превышающими пятьдесят миль в час. Еще одним пунктом меню является условие активации, называемое «Traffic Jams» (Пробки на дорогах) 108 и которое соответствует характеристике местоположения, определенной исходя из данных, полученных от устройства 18 позиционирования (Фиг.3) и/или различных датчиков 68 транспортного средства (Фиг.3), которые могут определить, что условия дорожного движения рядом с транспортным средством 12 имеют признаки пробки на дороге. Например, может быть отслежено сохранение скорости транспортного средства минимум на 20 миль в час меньше предельной скорости, установленной на дороге, соответствующей местоположению транспортного средства, в течение периода времени, превышающего пять минут. Кроме того, пункт меню условий активации, обозначенный как «Straight Roads» (Прямые дороги) 110, связан с характеристикой геометрии дороги, которая может быть вычислена на основании установленного местоположения транспортного средства. Предусмотрено, что условия активации, представленные на Фиг.6, могут быть изменены таким образом, чтобы определять, когда должно быть активировано или другим образом задействовано массажное устройство 16, включая опции для пассажира или водителя определять конкретное условие активации. Одним из примеров конкретного условия активации является заданный участок запрограммированного маршрута движения, когда запуск массажного устройства 16 будет выполнен контроллером 20, если установленное местоположение транспортного средства 12 указывает на то, что транспортное средство 12 движется по конкретному заданному участку запрограммированного маршрута.
На Фиг.6 нижний пункт меню представляет собой условие активации, обозначенное как «Learned» (Запомненное условие) 112. Данное условие активации контролирует систему 114 персонализации, которая предназначена для запоминания поведения и предпочтений пассажира или водителя, связанных с конкретным пассажиром или водителем, сидящим в кресле 14. В одном варианте система 114 персонализации встроена в мобильное устройство, например, смартфон или планшетный компьютер, с возможностью подключения к контроллеру 20, например, путем беспроводной синхронизации через Bluetooth. Система 114 персонализации включает в себя память, которая может быть той же самой памятью 66 контроллера 20 массажной системы 10 кресла, для сохранения текущей характеристики местоположения в файле данных при запуске массажного устройства 16 вручную. Далее контроллер 20 отслеживает файл данных, чтобы определить повторяющуюся характеристику местонахождения в файле данных. Повторяющаяся характеристика местонахождения по существу может быть применена в качестве условия активации в случае, когда пункт меню «Learned» (Запомненное условие) 112 переведен в режим «ON» (ВКЛ.).
На этапе 116, как показано на Фиг.5, в случае, если удовлетворено одно из условий активации, то массажное устройство 16 будет запущено в соответствии с заданными параметрами массажа. На Фиг.7-8 показан пользовательский интерфейс 70 на экране 36 (Фиг.1), который предназначен для выбора пассажиром или водителем пользовательских установок массажа и изменения настроек по умолчанию на персонализированные настройки. Параметры массажа, показанные в варианте, представленном на Фиг.7-8, включают в себя зону охвата и уровень интенсивности массажа. Предполагается, что параметры массажа могут включать в себя способ, продолжительность и конкретные зону охвата и уровни интенсивности массажа. Кроме того, для дальнейшего задания настроек также предусмотрено, что пользовательский интерфейс 70 может включать в себя удаленный пользовательский интерфейс, доступ к которому может быть выполнен с помощью персонального компьютера, смартфона или другого устройства, не встроенного в бортовые компоненты транспортного средства 12.
Как показано на Фиг.7, для регулировки 118 предпочтительных значений настроек 116 массажа выбрано кресло 14 с водительской стороны 117 транспортного средства 12. Массажеры 54 (Фиг.2) на поясничной зоне 62 спинки 50 кресла переведены в режим «OFF» (ВЫКЛ.) 120, а массажеры 54 (Фиг.2) на сиденье 48 переведены в режим высокого уровня 122 интенсивности. В соответствии с показанными пользовательскими установками массажа, на левом изображении 124 кресла 14 массажеры 54 на сиденье 48 выделены цветом. Следовательно, массажеры 54 (Фиг.2) на сиденье 48 будут автоматически запущены на высоком уровне 122 интенсивности, когда будет иметь место задействованное условие активации, как описано выше. Например, если условие активации включает в себя заданное непрерывное время в пути по шоссе, то контроллер 20 приведет в действие массажное устройство 16 на сиденье 48 на высоком уровне 122 интенсивности по истечении заданного непрерывного периода времени перемещения по шоссе. Также предусмотрено, что автоматический запуск массажного устройства 16 может быть отложен, при этом сидящий пассажир или водитель будет предупрежден об этом посредством сообщения на пользовательском интерфейсе 70 или звукового сообщения, которое потребует от пассажира или водителя подтверждения необходимости выполнения массажа до начала активации массажного устройства 16 в соответствии с настройками 86.
На Фиг.8 для запуска массажа 128 вручную в соответствии с заданными установками массажа выбрано кресло 14 с пассажирской стороны 126 транспортного средства 12. Как показано на Фиг.8, правое изображение 132 показывает массажеры 54 (Фиг.2) в поясничной зоне 62 спинки 50 кресла, которые переведены в режим работы на низком уровне 130 интенсивности, и массажеры 54 на сиденье 48, которые переведены в режим работы на высоком уровне 122 интенсивности. Кроме того, при запуске массажа 128 вручную контроллер 20 может сохранить характеристику места нахождения транспортного средства 12, например, «движение по шоссе». Соответственно, контроллер 20 может идентифицировать шоссе в качестве повторяющейся характеристики местоположения, когда сидящий пассажир или водитель запускает массаж 128 вручную. При данной повторяющейся характеристике местоположения активация условия запуска «Learned» (Запомненное условие) 112 приведет к отслеживанию массажной системы 10 кресла при повторном движении транспортного средства 12 по шоссе, чтобы автоматически активировать массажное устройство 16 (Фиг.2) в соответствии с определенными параметрами массажа.
На этапе 134, как показано на Фиг.5, после запуска массажного устройства 16 контроллер 20 продолжает обработку данных, полученных от устройства 18 позиционирования и датчика 68 транспортного средства, для отслеживания того, продолжает ли выполняться одно из условий активации на этапе 136. Если ни одно из условий активации не имеет место, то контроллер 20 на этапе 138 останавливает массаж, прекращая работу массажного устройства 16 в соответствующем кресле 14. Следовательно, массажная система 10 кресла представляет собой систему для автоматического запуска и управления массажным устройством 16 без необходимости активации и управления массажем вручную со стороны пассажира или водителя. Таким образом, массажная система 10 кресла способна обеспечить массаж областей на теле пассажира или водителя до появления существенных побочных эффектов, вызванных недостатком мышечной активности и нарушением кровообращения, таких как боль или онемение мышц бедер и поясницы пассажира или водителя.
Специалистам в данной области техники понятно, что конструкция описанного изобретения и других деталей не ограничена каким-либо конкретным материалом. Другие примерные варианты воплощения изобретения, раскрытые в данном описании, могут предусматривать использование любого другого из широкого диапазона материалов, если иное не указано специально.
Реферат
1. Массажная система для кресла транспортного средства, которая включает в себя массажное устройство, устанавливаемое в кресло, устройство позиционирования для определения местоположения транспортного средства и контроллер для управления массажным устройством на основании установленного местоположения транспортного средства.2. Массажная система по п. 1, в которой контроллер выполнен с возможностью использовать картографические данные для формирования характеристики местонахождения на основании установленного местоположения транспортного средства.3. Массажная система по п. 2, в которой характеристика местонахождения представляет собой классификацию по типу дороги, в зависимости от которой контроллером могут быть отрегулированы параметры работы массажного устройства.4. Массажная система по п. 2, в которой параметры работы массажного устройства могут быть отрегулированы контроллером на основании прогнозируемого маршрута, сформированного устройством позиционирования на основании картографических данных и установленного местоположения транспортного средства.5. Массажная система по п. 2, которая дополнительно включает в себя пользовательский интерфейс для задания настроек массажа, причем контроллер функционально соединен с пользовательским интерфейсом и массажным устройством и выполнен с возможностью управлять массажным устройством на основании заданных настроек массажа.6. Массажная система по п. 5, в которой настройки массажа включают в себя условие активации, которое представляет собой заданное непрерывное время в пути по дороге заданного типа, причем контроллер выполнен с возможностью акти
Формула
Комментарии