Сидение транспортного средства - RU2062717C1
Код документа: RU2062717C1
Описание
Изобретение относится к сидению транспортного средства с механической колебательной системой, которая подрессорена с помощью пневматической рессоры, и с электронной системой управления, которая управляет воздушными клапанами для подачи воздуха под давлением или для выпуска воздуха в зависимости от хода колебательной системы.
Электронные системы управления сиденьями с воздушным демпфированием известны, например, из заявки ФРГ 2736242, кл. В 60 N 1/00, 1984. Они предназначены для определенных управляющих функций и выдают с этой целью выходные сигналы, например, для выключения серводвигателя или для контроля заданного среднего положения пневмосиденья путем подачи воздуха в пневморессору или выпуска воздуха из нее, системы управления такого вида работают в зависимости от величины хода колебательной системы путем того, что обычно контролируются две или несколько определяемых датчиками позиций сиденья, которые достигаются колебательной системой, то есть датчики выдают входные сигналы к электронной системе управления.
На практике такие системы управления требуют точной юстировки датчиков, причем соответствующие монтажные позиции датчиков на колебательной системе могут быть очень различны в зависимости от того, какой тип сиденья или какой тип колебательной системы применяется и/или какая функция управления должна выполняться электронной системой управления. Если должно реализоваться несколько управляющих функций, как, например, включение воздушных клапанов для подачи воздуха в пневморессору или для отвода воздуха из нее и/или подключение или отключение дополнительного воздушного объема и т.д. то тогда на колебательной системе соответственно должно монтироваться и юстироваться много датчиков.
Целью изобретения является создание сиденья транспортного средства с пневматической подвеской и с электронной системой управления, которое должно существенно проще монтироваться в части электронной системы управления, причем одновременно должно быть реализовано несколько функций управления без того, что благодаря этому увеличиваются расходы на позиционирование и юстировку датчиков.
В соответствии с изобретением эта цель достигается путем того, что колебательная система имеет датчик величины хода колебательной системы, который во время эксплуатации сиденья постоянно выдает непрерывную последовательность электрических сигналов, которые представляют точное, соответствующее пути и синхронное электрическое отображение колебаний колебательной системы, и что электрическое отображение колебаний подается на вход микропроцессора, который по постоянно возвращающимся повторяющимся программам сравнивает картину колебания с заранее установленными заданными значениями возможных колебаний и в случае отклонений выдает один или несколько выходных сигналов, которые по меньшей мере управляют воздушными клапанами для подачи воздуха в пневморессору или выпуска из нее.
По идее изобретения прежде всего действительно то, что колебательная система освобождена от большего или меньшего количества датчиков, которые выдают в до сих пор известных системах управления сиденьями дискретные входные сигналы (например, "включено-выключено" или напряжение: ДА (НЕТ), и которые для этой цели должны быть смонтированы на различных местах колебательной системы с точной юстировкой.
Теперь действительно то, что достаточно единственного датчика, смонтированного на колебательной системе, чтобы выполнить все требования электронной системы управления сиденьем. Предпосылкой для этого является, однако, то, что этот единственный датчик хода колебательной системы постоянно выдает непрерывную последовательность электрических сигналов, которая представляет точно соответствующее пути и синхронное электрическое отображение фактических колебаний колебательной системы.
Образованные датчиком ходов колебаний последовательности сигналов могут иметься в виде последовательности цифровых значений или в виде электрических аналоговых сигналов. Последние генерируются, предпочтительно, с помощью потенциометра, но могут также альтернативно, например, с помощью индуктивного датчика перемещений или опто-электронной системой датчиков, какими они сегодня стандартизованы.
Созданное электрическое отображение колебаний колебательной системы по идее изобретения подается на вход микропроцессора. При этом преимуществом является то, что, с одной стороны, процессор может быть установлен где-нибудь на сиденье или на расстоянии от сиденья, а не закрепляться в тесном пространстве внутри колебательной системы, но с другой стороны он все же будет иметь для использования подробное и синхронное электрическое отображение колебаний колебательной системы на своем входе.
По этому электрическому отображению колебаний процессор в соответствии со своим рабочим циклом, то есть с помощью постоянно повторяющегося прохождения программ, может ограничивать определенные фактические значения колебаний путем сравнения с заранее установленными заданными значениями, причем в соответствии со специальным вариантом исполнения изобретения ранее установленные или ранее устанавливаемые заданные величины колебаний могут изменяться. Это является существенным преимуществом, так как теперь может оцениваться любое множество фактических значений колебаний колебательной системы без того, что для этой цели нужно механическое устройство или нужны механические изменения или юстирование отдельного датчика на колебательной системе. Колебательная система остается свободной от многократного перемещения отдельного датчика, как это было известно до сих пор в электронных системах управления для учета различных распознаваемых вводных сигналов. Соответственно просто и без проблем можно согласовать изобретенную систему управления сиденьем с соответствующим типом сиденья или с соответствующей колебательной системой.
Также является преимуществом то, что для согласования системы управления с соответствующим типом сиденья или для генерации определенных выходных сигналов может быть изменена схемная обработка в процессоре считанных из электрического отображения колебаний фактических значений, как это может быть реализовано с помощью процессоров с программируемой памятью.
В новейших конструкциях сидений известны конструкции, в которых колебательные свойства сиденья могут изменяться не только подводом воздуха в пневморессору или отводом воздуха из нее, но и путем присоединения или отключения так называемых дополнительных воздушных полостей воздушной системы. Также известно подключение или отключение дополнительного амортизатора, чтобы интенсивнее амортизировать колебания сиденья в случае необходимости. Однако до сих пор затраты на управление такими дополнительными элементами были соответственно велики. Теперь с помощью дополнительного пункта 6 формулы показано, как просто могут управляться до изобретению такие дополнительные элементы.
Дополнительные пункты 7 и 8 показывают целесообразные варианты изобретения для управления регулируемым амортизатором.
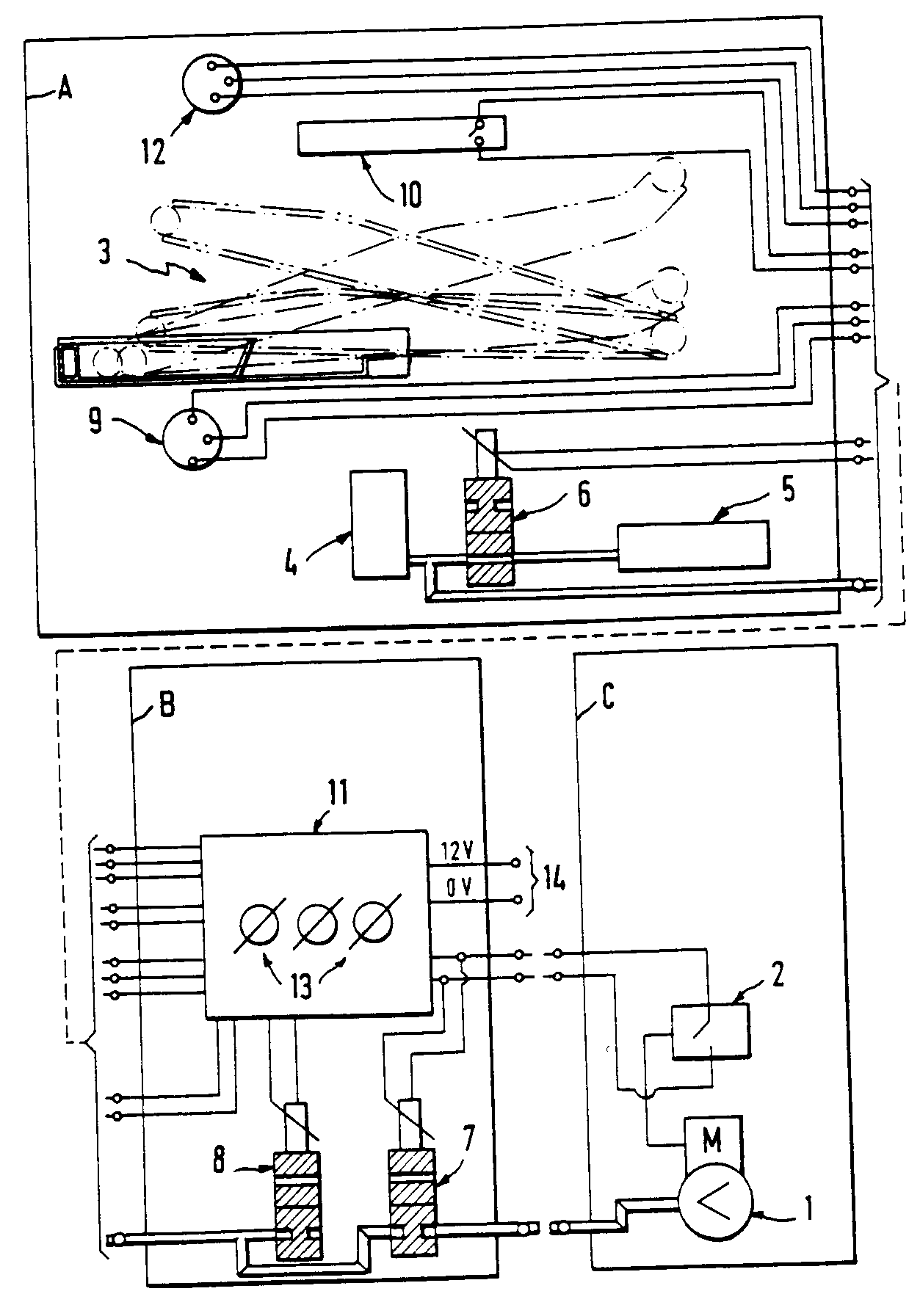
Ниже изобретение подробнее разъясняется с помощью чертежей, показывающих вариант исполнения изобретения. На чертеже показано: на фиг.1 автоматически управляемая конструкция сиденья транспортного средства с пневматической амортизацией согласно изобретению.
Представлены в виде конструктивных узлов блок А сиденья, управляющий модуль В и компрессорная часть С.
Речь идет о сиденье с пневмоамортизацией, которое имеет для своего запитывания сжатым воздухом собственный компрессор 1 в компрессорной части С, который включается и выключается реле 2. Колебательная система сиденья символически представлена внутри блока А сиденья, а именно в виде показанной штрих-пунктиром колебательной системы 3 параллелограммно-шарнирного типа, которая сама по себе рассматривается в качестве достаточно известной. Встроенная при конкретном исполнении в колебательную систему пневмокомпрессора 4 для лучшей наглядности показана под колебательной системой.
Далее сиденье оснащено дополнительным воздушным объемом 5, который с помощью клапана 6 с электромагнитным управлением может подключаться к воздушному объему пневморессоры или снова от него отключаться.
Сама пневморессора снабжается воздухом с помощью клапана 7, а из нее воздух удаляется с помощью клапана 8. Клапан 7 включается вместе с реле 2 для управления компрессором 1.
Согласно изобретению колебательная система имеет датчик хода колебаний в виде потенциометра 9, который простейшим образом может быть смонтирован между двумя подвижными относительно друг друга частями колебательной системы 3 параллелограммно-шарнирного типа, так что возникает точное, соответствующее пути и синхронное электрическое отображение ходов колебательной системы.
Если водитель занимает место на сиденье транспортного средства, то прежде всего он включает с помощью контактного переключателя 10 сиденья имеющийся в модуле управления С процессор.
Показано рабочее состояние. Во время работы постоянно подается на вход процессора 11 полученное с помощью потенциометра 9, соответствующее пути электрическое отображение колебаний колебательной системы. Благодаря этому процессор в состоянии сравнить при постоянно повторяющихся прохождениях программ электрическое отображение колебаний с заранее установленными заданными значениями.
Прежде всего, то есть непосредственно после задействования системы управления запрашивается статическое заданное среднее положение сиденья. Оно может быть заранее определено с помощью хорошо достижимого и смонтированного на сиденье потенциометра 12. При ожидаемом вначале отклонения процессор 11 выдает выходное сигнал для включения компрессора 1 и для одновременного открытия подающего воздух клапана 7. Тогда сиденье движется в свое статическое заданное среднее положение.
Дальнейшая предварительная настройка для заданных значений "событий" должна проводиться в модуле В управления с помощью имеющегося там потенциометра 13. Например, могут определяющие это и предварительно заданные величины быть несколько ниже среднего положения сиденья, чтобы компрессор после начального разгона сиденья снова отключить и снова закрыть подающий воздух клапан 7.
Другие заранее заданные значения, устанавливаемые с помощью потенциометра 13, служат для того, чтобы в рабочем состоянии контролировать условия колебания сиденья и при отклонении выдавать с помощью процессора 11 выходные сигналы, управляющие клапаном 8 для выпуска воздуха, а также клапаном 7 для подачи воздуха в пневморессору и/или клапаном 6 для подсоединения или отсоединения дополнительного объема 5 воздуха.
Вариантность в установлении заранее заданных величин и/или в изменении схемной обработки фактических значений, характеризующих отклонения и опрашиваемых при сравнении с электрическим отображением колебаний, при уже достигнутом на сегодня уровне микропроцессорной техники почти не имеет границ.
Реферат
Использование: в сидении транспортного средства с электронной системой управления. Сущность изобретения: сидение содержит механическую колебательную систему, демпфируемую с помощью пневморессоры с системой управления и датчиком величины хода колебательной системы. Датчик имеет возможность выдавать микропроцессору последовательность электрических сигналов, представляющих точное, соответствующее пути и синхронное отображение колебаний колебательной системы, а микропроцессор позволяет сравнивать отображение этих колебаний с заранее установленными значениями и при отклонении колебаний от заданных выдавать сигналы для управления воздушными клапанами пневморессор. Это позволяет упростить монтаж системы управления и ее обслуживание. 7 з.п. ф-лы, 1 ил.
Комментарии