Система и способ обеспечения безопасности транспортного средства и контроллер такой системы - RU2711850C2
Код документа: RU2711850C2
Чертежи










Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая патентная заявка является частичным продолжением и испрашивает приоритет и все преимущества заявки на выдачу патента США под № 14/675,367, поданной 31 марта 2015 года, которая настоящим включена в материалы настоящего описания посредством ссылки во всей своей полноте.
УРОВЕНЬ ТЕХНИКИ
Системы обеспечения безопасности часто специализируются на ударах при столкновении на высоких скоростях, которые могут вызывать серьезные травмы и/или смертельные случаи. Однако со становлением более пожилых и более тяжелых занимающих места людей большей долей населения, также уместна специализация на ударах на более низких скоростях. Фактически, удары на низких скоростях часто приводят к травмам нижних конечностей и верхних областей тела. Травмы нижних конечностей, даже когда не угрожают жизни, типично могут оказывать значительные и нежелательные воздействия на качество жизни человека, а также иметь высокие социальные издержки. Поэтому требуются улучшения систем обеспечения безопасности транспортного средства, защищающих нижние конечности, а также верхние области тела.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Для преодоления по меньшей мере некоторых из проблем уровня техники в одном из аспектов изобретения предложена система обеспечения безопасности транспортного средства, содержащая:
первую подушку, выполненную с возможностью расположения за верхней частью сиденья транспортного средства;
вторую подушку, выполненную с возможностью расположения за подголовником сиденья транспортного средства; и
множество устройств пассивного перемещения, каждое из которых выполнено с возможностью приведения в действие независимо друг от друга и обеспечения перемещения соответствующей одной из подушек.
В одном из вариантов предложена система, дополнительно содержащая контроллер, который включает в себя процессор и память, хранящую команды, исполняемые процессором для приведения в действие по меньшей мере одного из устройств пассивного перемещения.
В одном из вариантов предложена система, в которой память дополнительно хранит команды, исполняемые процессором для приема данных с по меньшей мере одного датчика удара и использования принятых данных при вынесении решения привести в действие по меньшей мере одно из устройств пассивного перемещения.
В одном из вариантов предложена система, в которой память дополнительно хранит команды, исполняемые процессором для приведения в действие только одного из устройств пассивного перемещения на основании принятых данных.
В одном из вариантов предложена система, в которой устройства пассивного перемещения включают в себя одно из подушки безопасности и пластиковой камеры.
В одном из вариантов предложена система, в которой устройства пассивного перемещения включают в себя электродвигатель.
В одном из вариантов предложена система, в которой устройство пассивного перемещения, выполненное с возможностью перемещения первой подушки, является электродвигателем, а устройство пассивного перемещения, выполненное с возможностью перемещения второй подушки, является подушкой безопасности.
В одном из вариантов предложена система, в которой устройства пассивного перемещения выполнены с возможностью перемещения первой и второй подушек по меньшей мере одним из вертикального и горизонтального образов относительно транспортного средства.
В одном из вариантов предложена система, в которой устройства пассивного перемещения выполнены с возможностью перемещения подушки вертикально, причем система дополнительно содержит по меньшей мере одно устройство горизонтального перемещения, при этом каждое по меньшей мере одно устройство горизонтального перемещения выполнено с возможностью перемещения соответствующей одной из подушек горизонтально.
В одном из вариантов предложена система, в которой каждое по меньшей мере одно устройство горизонтального перемещения включает в себя устройство с накопленной энергией, которое выполнено с возможностью высвобождения механизма горизонтального перемещения.
В одном из вариантов предложена система, дополнительно содержащая контроллер, который включает в себя процессор и память, хранящую команды, исполняемые процессором для приведения в действие по меньшей мере одного из устройств пассивного перемещения и устройства с накопленной энергией.
В одном из дополнительных аспектов предложен способ обеспечения безопасности транспортного средства, включающий в себя этап, на котором:
используют данные, относящиеся к удару, для определения того, что следует привести в действие по меньшей мере одно из множества устройств пассивного перемещения, которые соответственно выполнены с возможностью обеспечения перемещения первой подушки, расположенной за верхней частью сиденья транспортного средства, и второй подушки, расположенной за подголовником сиденья транспортного средства; при этом устройства пассивного перемещения выполнены с возможностью приведения в действие независимо друг от друга.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором приводят в действие множество устройств пассивного перемещения на основании принятых данных.
В одном из вариантов предложен способ, в котором устройства пассивного перемещения выполнены с возможностью перемещения подушки вертикально, причем способ дополнительно включает в себя этап, на котором, на основании данных, относящихся к удару, перемещают по меньшей мере одно устройство горизонтального перемещения, которое выполнено с возможностью перемещения соответствующей одной из подушек горизонтально.
В одном из вариантов предложен способ, в котором каждое по меньшей мере одно устройство горизонтального перемещения включает в себя устройство с накопленной энергией, которое выполнено с возможностью высвобождения механизма горизонтального перемещения, причем способ дополнительно включает в себя этап, на котором приводят в действие по меньшей мере одно из устройства пассивного перемещения и устройства с накопленной энергией.
В одном из еще дополнительных аспектов предложен контроллер системы обеспечения безопасности транспортного средства, содержащий процессор и память, хранящую команды, исполняемые процессором и включающие в себя команды для:
использования данных, относящихся к удару, для определения того, что следует привести в действие по меньшей мере одно из множества устройств пассивного перемещения, которые соответственно выполнены с возможностью обеспечения перемещения первой подушки, расположенной за верхней частью сиденья транспортного средства, и второй подушки, расположенной за подголовником сиденья транспортного средства; при этом устройства пассивного перемещения выполнены с возможностью приведения в действие независимо друг от друга.
В одном из вариантов предложен контроллер, в котором команды дополнительно включают в себя команды для приведения в действие одного или более из устройств пассивного перемещения на основании принятых данных.
В одном из вариантов предложен контроллер, в котором устройства пассивного перемещения выполнены с возможностью перемещения первой и второй подушек по меньшей мере одним из вертикального и горизонтального образов относительно транспортного средства.
В одном из вариантов предложен контроллер, в котором устройства пассивного перемещения выполнены с возможностью перемещения подушки вертикально, причем команды дополнительно включают в себя команды для перемещения на основании данных, относящихся к удару, по меньшей мере одного устройства горизонтального перемещения, выполненного с возможностью перемещения соответствующей одной из подушек горизонтально.
В одном из вариантов предложен контроллер, в котором каждое по меньшей мере одно устройство горизонтального перемещения включает в себя устройство с накопленной энергией, выполненное с возможностью высвобождения механизма горизонтального перемещения, причем команды дополнительно включают в себя команды для приведения в действие по меньшей мере одного из устройств пассивного перемещения и устройства с накопленной энергией.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
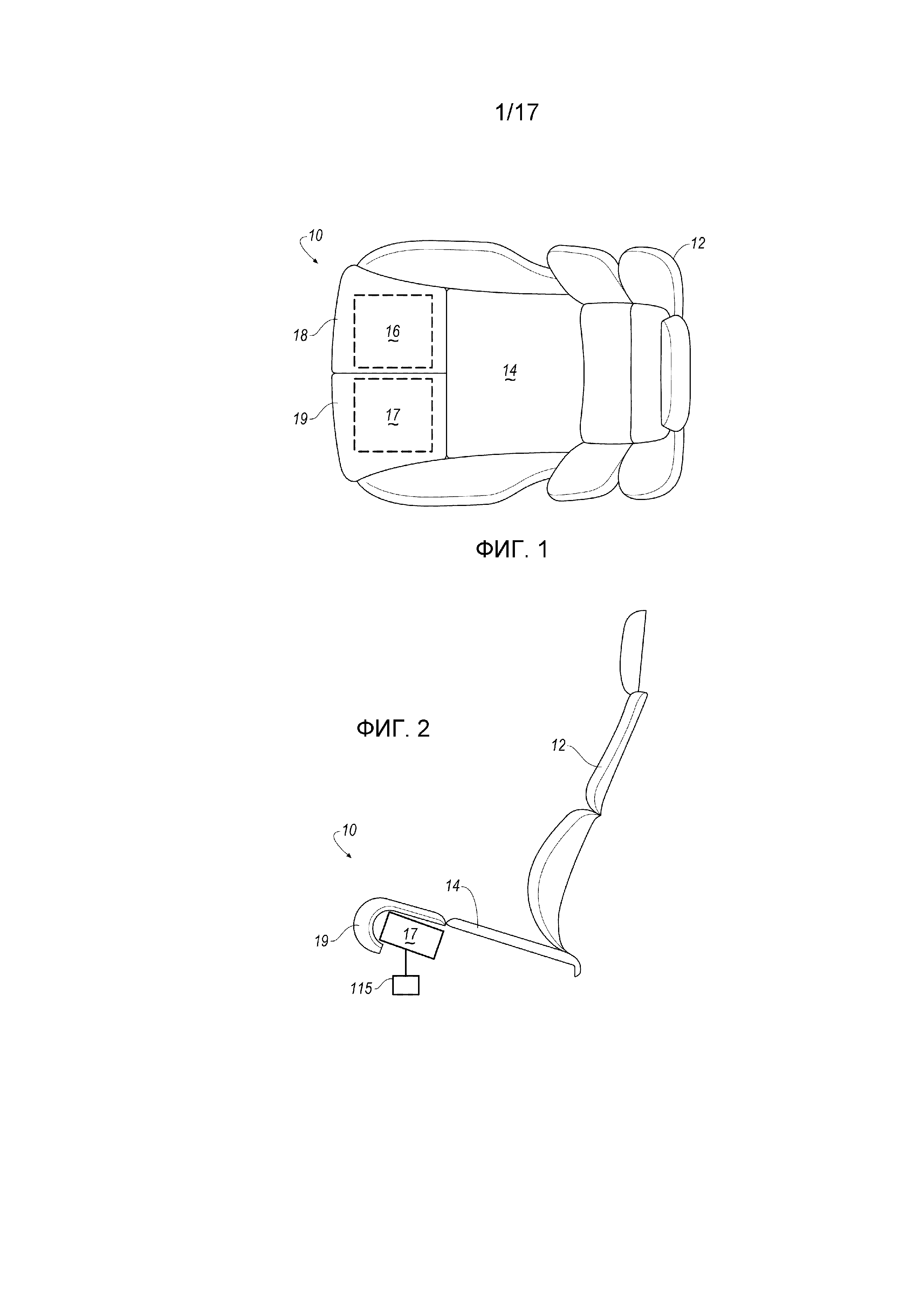
Фиг. 1 - общий вид сверху примерной системы шарнирно сочлененных опор.
Фиг. 2 - вид сбоку системы по фиг. 1.
Фиг. 3 - общий вид системы по фиг. 1, показывающий незадействованное состояние и задействованное состояние.
Фиг. 4 - вид сбоку системы по фиг. 1, показывающий незадействованное состояние и незадействованное состояние.
Фиг. 5 - общий вид системы по фиг. 1 в дополнительном примере задействованного состояния.
Фиг. 6 - вид сбоку системы по фиг. 1 в задействованном состоянии по фиг. 5.
Фиг. 7A и 7B иллюстрируют вариант осуществления системы по фиг. 1, включающей в себя шарнирно сочлененные опоры, то есть, подушки сиденья, которые могут перемещаться горизонтально и вертикально.
Фиг. 8 - структурная схема системы шарнирно сочлененных опор по фиг. 1.
Фиг. 9 - общий вид сверху еще одной примерной системы шарнирно сочлененных опор.
Фиг. 10 - вид сбоку системы по фиг. 9.
Фиг. 11 - вид сбоку системы по фиг. 9, показывающий незадействованное состояние и задействованное состояние.
Фиг. 12A и 12B иллюстрируют систему по фиг. 9, включающую в себя опоры, которые могут перемещаться горизонтально и вертикально.
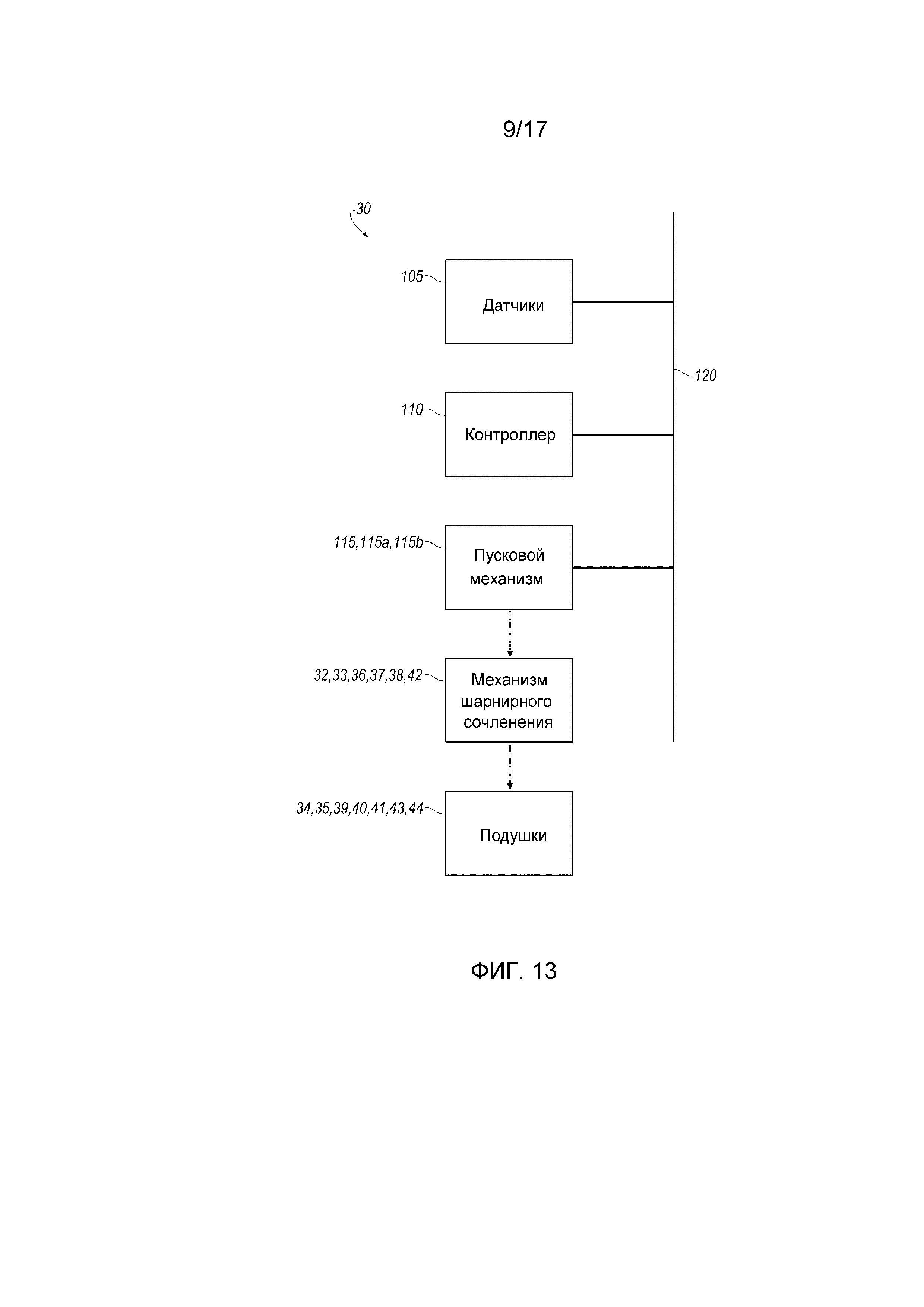
Фиг. 13 - структурная схема системы шарнирно сочлененных опор по фиг. 9.
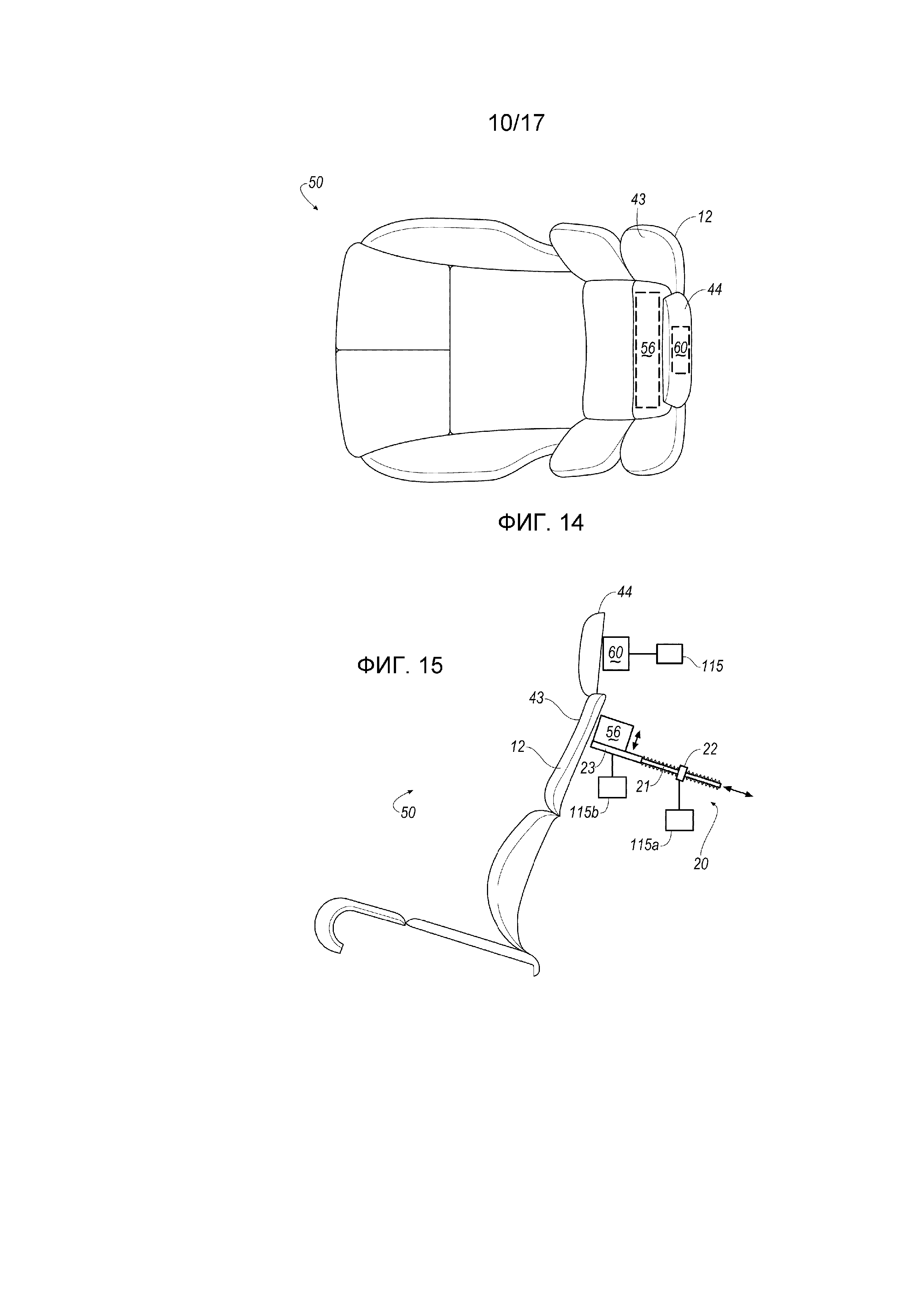
Фиг. 14 - общий вид сверху дополнительной примерной системы шарнирно сочлененных опор.
Фиг. 15 - вид сбоку системы по фиг. 14.
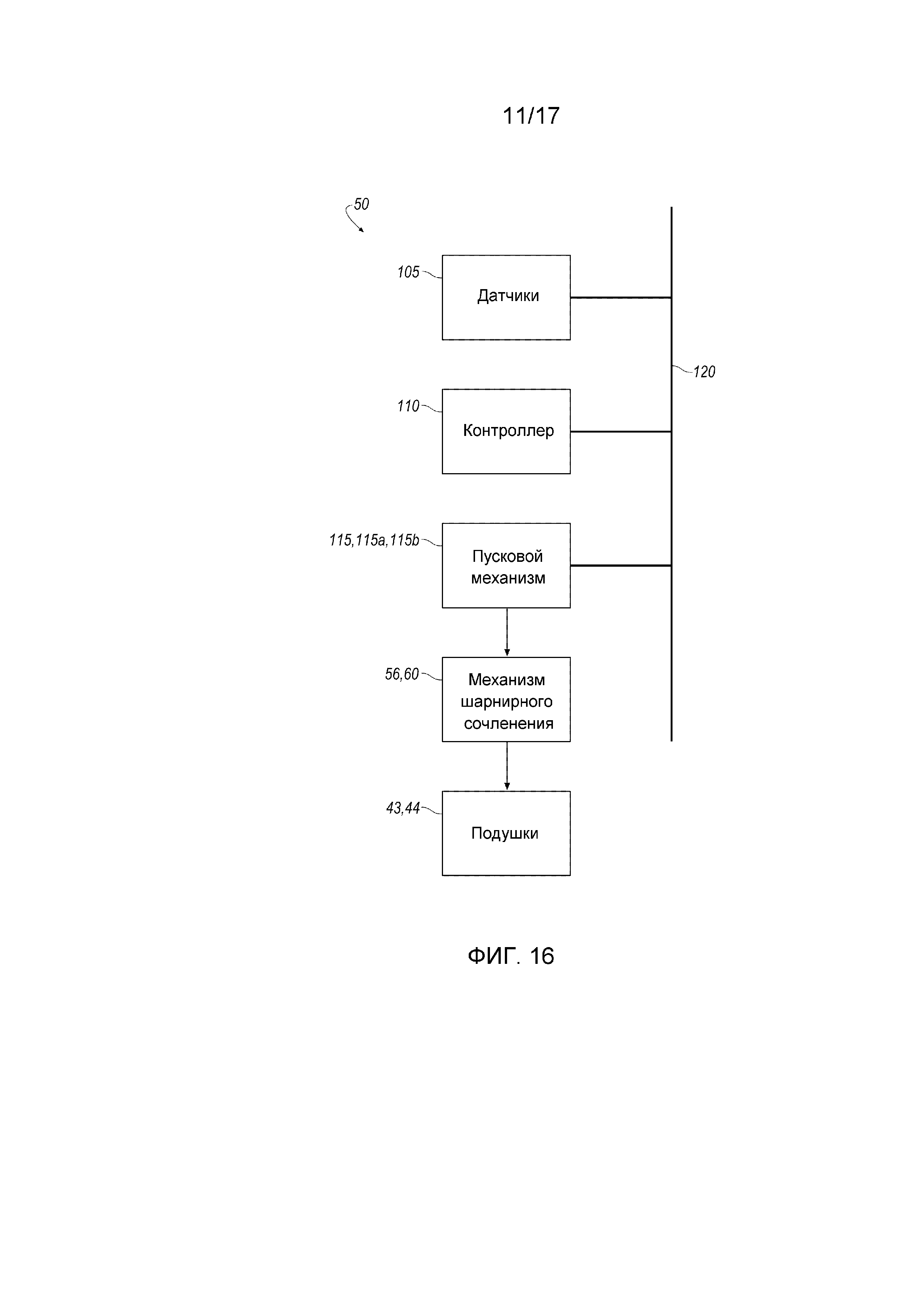
Фиг. 16 - структурная схема системы шарнирно сочлененных опор по фиг. 14.
Фиг. 17 - общий вид сверху третьей примерной системы шарнирно сочлененных опор.
Фиг. 18 - вид сбоку системы по фиг. 17.
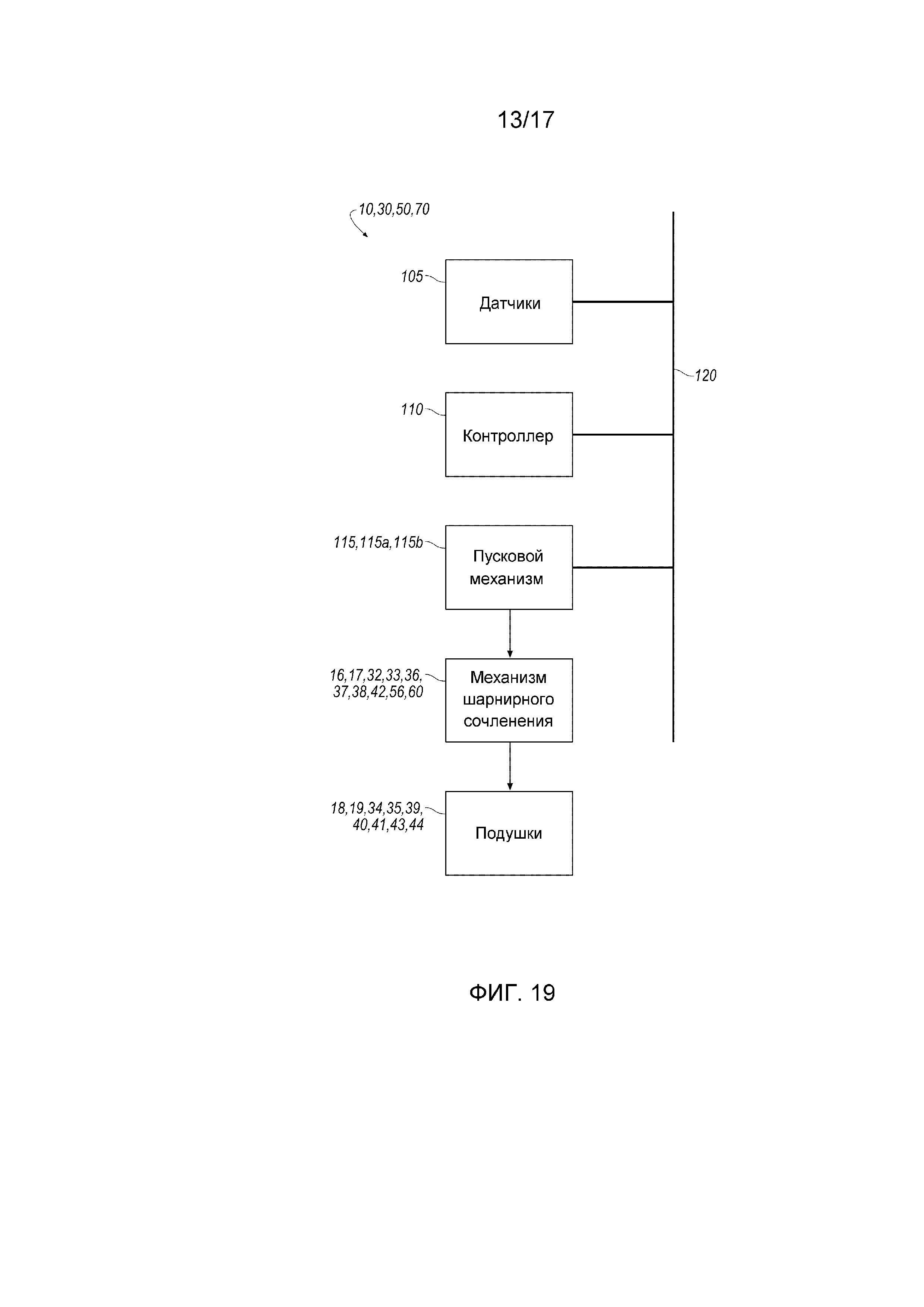
Фиг. 19 - структурная схема системы шарнирно сочлененных опор по фиг. 17.
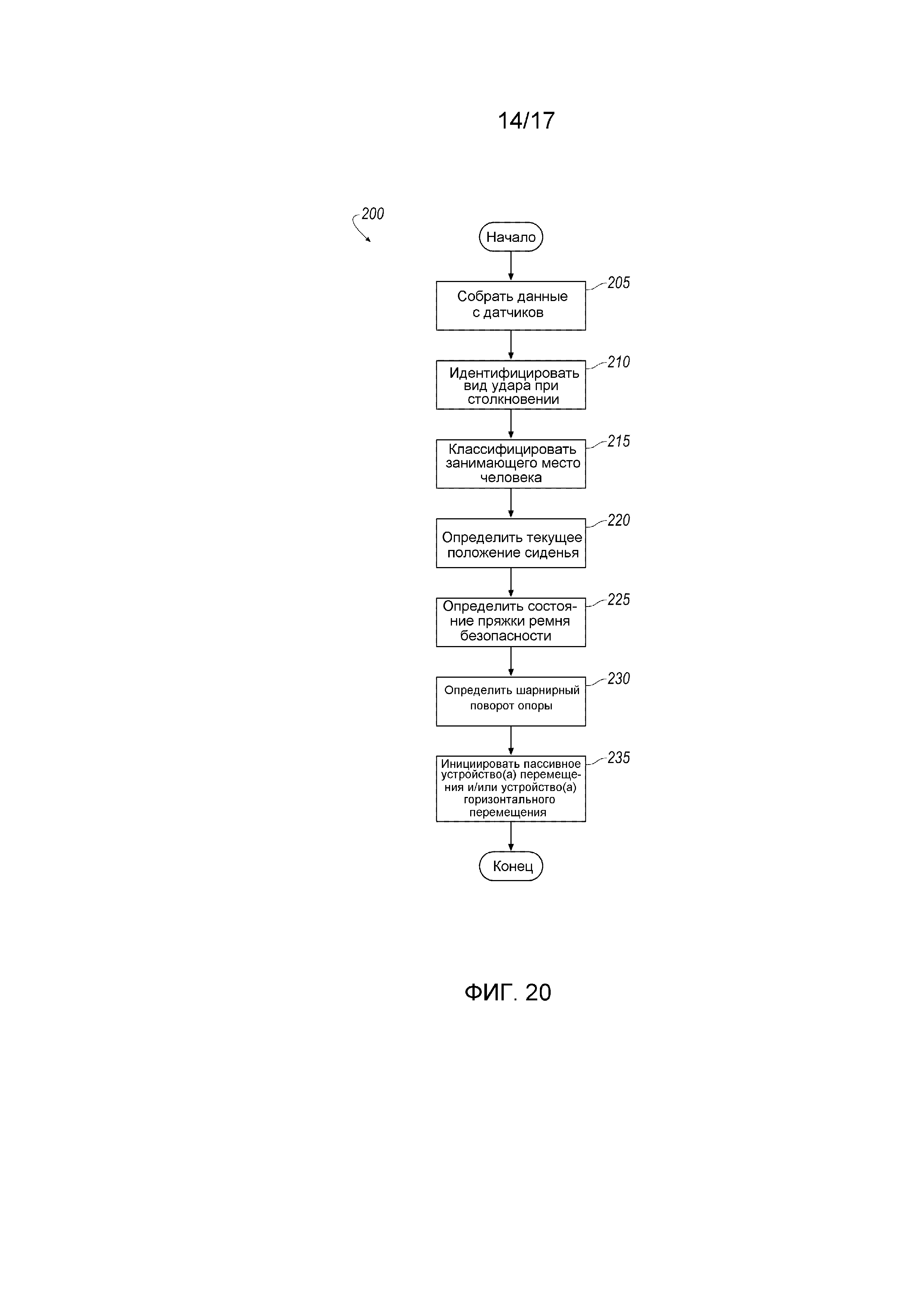
Фиг. 20 иллюстрирует примерный ход последовательности операций для примерных систем шарнирно сочлененных опор по фиг. 1, 9, 14 и 17.
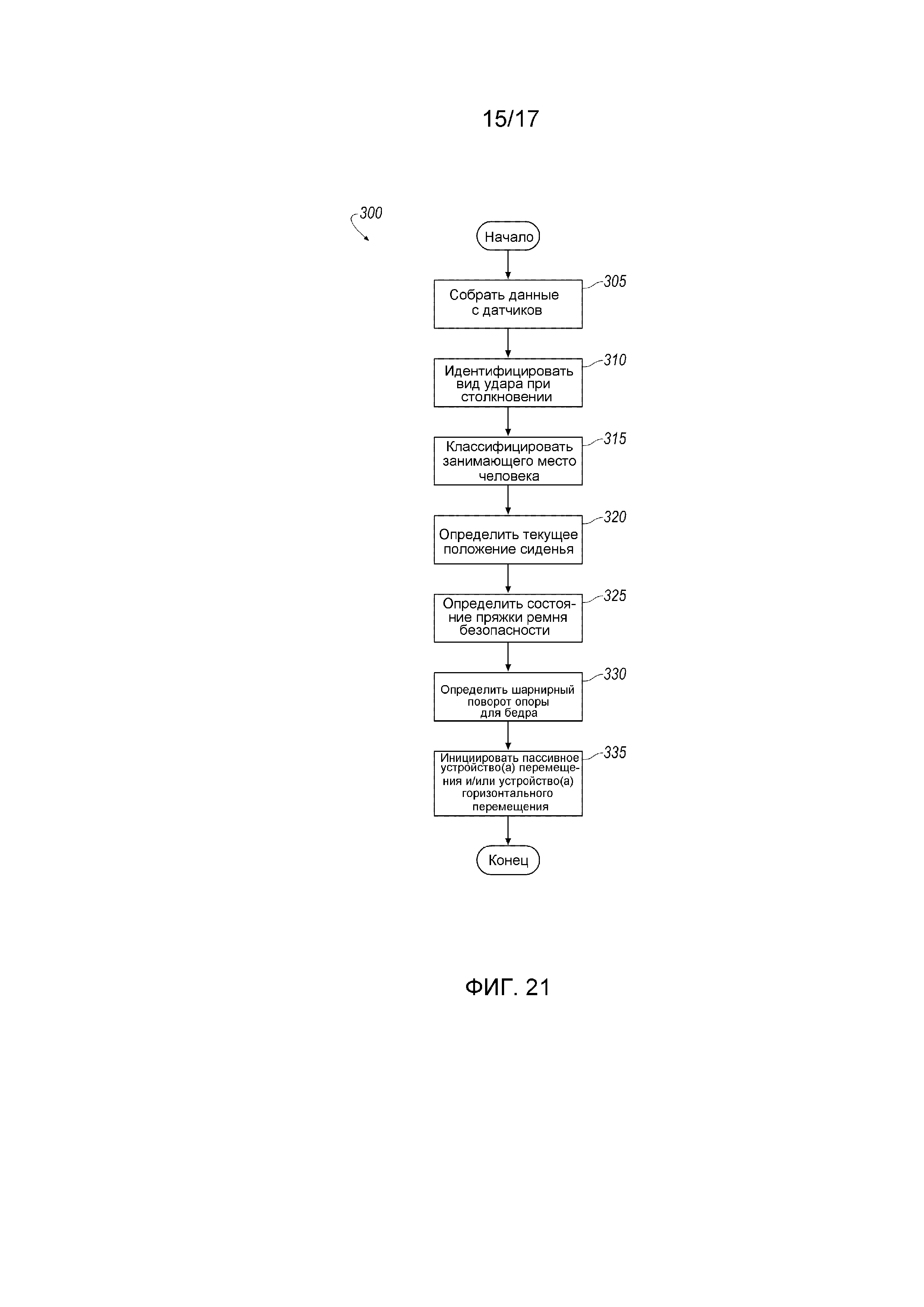
Фиг. 21 иллюстрирует примерный ход последовательности операций для примерной системы шарнирно сочлененных опор по фиг. 1.
Фиг. 22 иллюстрирует примерный ход последовательности операций для примерной системы шарнирно сочлененных опор по фиг. 9.
Фиг. 23 иллюстрирует примерный ход последовательности операций для примерной системы шарнирно сочлененных опор по фиг. 14.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Со ссылкой на фиг. 1-6, в материалах настоящего описания описана система 10 шарнирно сочлененных опор, которая может быть установлена в нижней части 14 сиденья 12 транспортного средства, иногда также указываемой как часть 14 сиденья или горизонтальная часть 14, даже если часть 14 вообще, строго говоря, по существу не является горизонтальной. Часть 14 сиденья как правило включает в себя заднюю часть 15, а также первую и вторую шарнирно-сочлененные подушки 18, 19 сиденья. Кроме того, система 10 в транспортном средстве может включать в себя многочисленные сиденья 12, а потому, что касается каждого сиденья из множества сидений в транспортном средстве, множество соответствующих компонентов, описанных в материалах настоящего описания в отношении одиночного сиденья 12 транспортного средства.
Например, система 10 включает в себя, установленные в сиденье, первое и второе устройства 16, 17 пассивного перемещения, которые соответственно, управляют перемещением, например, шарнирным поворачиванием, первой и второй шарнирно-сочлененных подушек 18, 19 сиденья. Устройства 16, 17 пассивного перемещения могут включать в себя любые из многообразия известных компонентов, таких как газонадувная подушка безопасности, надуваемая пластиковая камера, или тому подобное. Например, подушки 18, 19 сиденья могут перемещаться вверх и вниз, то есть, вертикально, относительно сиденья 12 и транспортного средства, в котором сиденье 12 установлено, посредством надувания устройств 16, 17 пассивного перемещения. Приведение в действие или использование устройств пассивного перемещения может инициироваться пусковым механизмом 115, таким как, например, известный газовый нагнетательный насос, который приводится в действие пиротехнически, и т.д. Система 10 может использоваться для поглощения энергии удара при столкновении от нижних конечностей, например, ног занимающего место человека в транспортном средстве.
Устройства 16, 17 пассивного перемещения могут приводиться в действие независимо друг от друга, а потому, подушки 18, 19 сиденья могут перемещаться, например, шарнирно поворачиваться совместно или независимо друг от друга. Кроме того, подушки 18, 19 сиденья могут шарнирно поворачиваться, например, перемещаться вертикально, независимо от задней части 15 нижней части 14 сиденья 12. Отметим, что, в настоящем контексте, «вертикально» означает, что механизмы 16, 17 перемещают подушки 18, 19 в целом вверх и вниз относительно горизонтальной части 14. Однако точно так же, как часть 14 может отклоняться до некоторой степени, например, на вплоть до приблизительно десяти или двадцати градусов, от нахождения идеально горизонтально, вертикальное перемещение подушек 18, 19 так же может отклоняться от нахождения идеально вертикально.
Фиг. 3 и 4 дают иллюстрацию, что одна или обе из подушек 18, 19 сиденья могут перемещаться в направлении вверх из незадействованного состояния в задействованное состояние посредством использования устройств 16, 17 пассивного перемещения. Кроме того, как видно на фиг. 5 и 6, одна или обе из подушек 18, 19 сиденья в качестве альтернативы могут перемещаться в направлении вперед, из незадействованного состояния в задействованное состояние, устройствами 16, 17 пассивного перемещения. То есть, подушки 18, 19 сиденья могут быть ограничены в горизонтальном направлении, так чтобы они могли перемещаться вертикально при развертывании устройств 16, 17 (фиг. 3, 4), или подушки 18, 19 сиденья могут быть ограничены в вертикальном направлении, так чтобы они могли перемещаться горизонтально при развертывании устройств 16, 17.
Кроме того, еще, в качестве альтернативы или дополнительно, как проиллюстрировано на фиг. 7A-7B, одно или более устройств 20 горизонтального перемещения, например, могут быть выполнены с возможностью, например, посредством приводных механизмов 21, перемещать подушки 18, 19 сиденья вперед и назад, то есть, по существу в направлении вдоль или параллельно продольной оси транспортного средства, в качестве альтернативы или дополнительно к вертикальному. То есть одно или более устройств 20 могут быть предусмотрены в качестве замены для или в качестве дополнения к одному или более устройств 16, 17.
Например, каждое из соответствующих устройств 16, 17 пассивного перемещения может использоваться в качестве устройств вертикального перемещения и может быть спарено с устройством 20 горизонтального перемещения. Например, приводной механизм 21, например, плунжерная или червячная передача, или тому подобное, может приводиться в действие посредством устройства 22 с накопленной энергией, которое, в свою очередь, присоединено к жесткому элементу 23, например, не имеющему свободного движения штоку, чтобы перемещать подушку 18 или 19. Пусковой механизм 115a может использоваться для высвобождения энергии из устройства 22 с накопленной энергией, тем самым, вызывая перемещение горизонтального приводного механизма 21, заставляющее элемент 23 вытеснять подушку 18 или 19 сиденья вперед. В качестве альтернативы или дополнительно, например, возможно по существу одновременно, пусковой механизм или механизмы 115b могут использоваться для развертывания устройства 16 и/или устройства 17, вытесняя подушку 18 сиденья и/или подушку 19 сиденья вверх.
Фиг. 8 - структурная схема примерной системы 10 опор для бедер по фиг. 1. Система 10 включает в себя датчики 105 удара, такие как известные, для выдачи данных в контроллер 110, чтобы определять возникновение удара или вероятного удара. Контроллер 110 как правило включает в себя процессор и память, память хранит команды, исполняемые процессором для оценивания данных с датчиков 105 и/или выдачи команд на исполнительные механизмы 115. Шина 120 связи транспортного средства, например, шина локальной сети контроллеров (CAN), или тому подобное, такая как известная, может использоваться для выдачи различных сообщений, в том числе, данных с датчиков 105, в контроллер 110, а также одну или более команд из контроллера 110 на один или более исполнительных механизмов 115, связанных с соответствующими устройствами 16, 17 пассивного перемещения. Соответственно, контроллер 110 может принимать данные с датчиков 105, по которым может быть идентифицировано возникновение или вероятное возникновение удара, например, удара на низкой скорости. Контроллер 110 затем может отправлять команду на исполнительный механизм 115, например, нагнетательный насос подушки безопасности или камеры, включенных в устройства 16, 17 пассивного перемещения, исполнительный механизм электродвигателя 20, и т.д. для приведения в действие одно или оба устройства 16, 17 пассивного перемещения.
Фиг. 21 иллюстрирует примерную последовательность 300 операций, которая может выполняться согласно командам в контроллере 110. До того, как последовательность 300 операций начинается, одна или более из подушек 18, 19 могут находиться в установленном по умолчанию или номинальном положении. Как описано в материалах настоящего описания, подушки 18, 19 могут перемещаться вперед, назад, вверх и/или вниз относительно номинального положения, например, как описано в отношении последовательности 300 операций.
Последовательность 300 операций начинается на этапе 305 блок-схемы, на которой контроллер 110 принимает, например, посредством шины 120, данные с различных датчиков 105. Например, контроллер 110 может принимать данные с датчиков 105 столкновения, таких как измерители ускорения, и тому подобное, датчиков 105 предстоящего столкновения, таких как датчики 105 с радиолокатором, датчики 105 изображения, и т.д., а также датчиков 105s занимающего место человека, например, указывающих вес, рост, возраст, и т.д., одного или более занимающих места людей в транспортном средстве, как известно, датчиков сиденья, указывающих положение или положения сиденья, датчиков 105s пряжки ремня безопасности, указывающих состояние ремня безопасности, например, застегнутое или расстегнутое, и т.д.
Затем, на этапе 310 блок-схемы, как правило, на основании данных с датчиков 105 столкновения и/или датчиков 105 предстоящего столкновения, контроллер 110 идентифицирует вид удара при столкновении, например, фронтальный, косой, с неполным перекрытием, на высокой скорости, на низкой скорости, с пешеходом, и т.д.
Затем, на этапе 315 блок-схемы, контроллер 110 выполняет классификацию занимающих места людей, например, известным образом определяет габариты занимающего место человека, например, согласно процентильному весу и/или росту, и т.д.
Затем, на этапе 320 блок-схемы, контроллер 110 определяет текущее положение сиденья 12, например, угол спинки сиденья, относительно основания 14 сиденья, положение сиденья 12 на направляющей сиденья, и т.д.
Затем, на этапе 325 блок-схемы, контроллер 110 определяет состояние пряжки ремня безопасности, например, застегнутое или расстегнутое.
Например, на этапе 330 блок-схемы, с использованием по меньшей мере некоторой из информации, принятой и/или определенной на этапах 305-325 блок-схемы, контроллер 110 определяет шарнирный поворот подушек 18, 19. Как указанно выше, одна или более из подушек 18, 19 могут перемещаться, то есть шарнирно поворачиваться, например, в случае удара при столкновении. Кроме того, возможно, что одна из подушек 18, 19 может перемещаться горизонтально, вертикально или так и так, тогда как парная подушка 18, 19 может перемещаться иным образом или вообще не перемещаться.
Такое перемещение может определяться контроллером 110 согласно различным факторам, например, скорости транспортного средства, виду удара при столкновении (например, косому, фронтальному, боковому, и т.д.) и габаритам занимающего место человека (например, процентилю массы, веса и/или роста человека по сравнению с населением в целом), положению сиденья, застегнут ли ремень безопасности, положению занимающего место человека в транспортном средстве (например, расположению сиденья), и т.д.
Затем, на этапе 335 блок-схемы, контроллер 110 отправляет сообщение в один или более пусковых механизмов 115, 115a, 115b для приведения в действие пассивных одного или более устройств 16, 17 перемещения и/или одного или более устройств 20 горизонтального перемещения.
Вслед за этапом 335 блок-схемы последовательность 300 операций заканчивается.
Фиг. 9 и 10 иллюстрируют примерную систему 30 шарнирно сочлененных опор, которая может быть установлена в сиденье 12 транспортного средства. Система 30 включает в себя множество шарнирно сочлененных подушек сиденья, в том числе, первую нижнюю подушку 34, вторую нижнюю подушку 35, первую поясничную подушку 39, центральную поясничную подушку 40, вторую поясничную подушку 41, верхнюю подушку 43 и подушку 44 подголовника. Верхняя подушка 43 может быть по существу U-образной подушкой, продолжающейся по длине сиденья 12 между поясничными подушками 39, 40, 41 и подушкой 44 подголовника. Система 30 дополнительно включает в себя множество устройств пассивного перемещения, в том числе, первое нижнее устройство 32 пассивного перемещения, второе нижнее устройство пассивного перемещения 33, первое поясничное устройство 36 пассивного перемещения, центральное поясничное устройство 37 пассивного перемещения, второе поясничное устройство 38 пассивного перемещения и верхнее устройство 42 пассивного перемещения. Система 30 может использоваться для поглощения энергии удара при столкновении от верхних частей тела занимающего место человека, например, головы и грудной клетки, при фронтальных и косых ударах.
Устройства 32, 33, 36, 37, 38, 42 пассивного перемещения соответственно управляют перемещением, например, шарнирным поворотом шарнирно сочлененных подушек 34, 35, 39, 40, 41, 43, 44 сиденья. Устройства 32, 33, 36, 37, 38, 42 пассивного перемещения могут включать в себя один или более механизмов, например, известных компонентов, таких как газонадувная подушка безопасности, надуваемая пластиковая камера, или тому подобное. Например, подушки 34, 35, 39, 40, 41, 43, 44 сиденья могут перемещаться вверх и вниз, то есть, по существу вертикально, относительно сиденья 12 и транспортного средства, в котором установлено сиденье 12, посредством надувания устройств 32, 33, 36, 37, 38, 42 пассивного перемещения. Приведение в действие или использование устройств пассивного перемещения может инициироваться пусковым механизмом 115, таким как известный, например, газовым нагнетательным насосом, который приводится в действие пиротехнически, и т.д.
Устройства 32, 33, 36, 37, 38, 42 пассивного перемещения могут приводиться в действие независимо друг от друга, а потому, подушки 34, 35, 39, 40, 41, 43, 44 сиденья могут перемещаться, например, шарнирно поворачиваться совместно или независимо друг от друга. Кроме того, подушки 34, 35, 39, 40, 41, 43, 44 сиденья могут шарнирно поворачиваться, например, перемещаться вертикально, независимо от нижней части 46 сиденья. Отметим, что, в данном контексте, «вертикально» означает, что механизмы 32, 33, 36, 37, 38, 42 перемещают подушки 34, 35, 39, 40, 41, 43, 44 по существу вверх и вниз относительно нижней части 14 сиденья. Однако ровно как часть 14 может отклоняться до некоторой степени, например, на вплоть до приблизительно десяти или двадцати градусов, от нахождения идеально или даже по существу горизонтально, вертикальное перемещение подушек 34, 35, 39, 40, 41, 43, 44 так же может отклоняться от нахождения идеально или по существу вертикально.
Фиг. 11 предоставляет иллюстрацию, что подушки 34, 35, 39, 40, 41, 43, 44 сиденья могут перемещаться в направлении вверх из незадействованного состояния в задействованное состояние посредством использования устройств 32, 33, 36, 37, 38, 42 пассивного перемещения. Кроме того, подушки 34, 35, 39, 40, 41, 43, 44 сиденья могут, в качестве альтернативы, перемещаться в направлении вперед из незадействованного состояния в задействованное состояние посредством устройств 32, 33, 36, 37, 38, 42 пассивного перемещения. То есть подушки 34, 35, 39, 40, 41, 43, 44 сиденья могут быть ограничены в горизонтальном направлении, так что они могут перемещаться вертикально при развертывании устройств 32, 33, 36, 37, 38, 42, или подушки 34, 35, 39, 40, 41, 43, 44 сиденья могут быть ограничены в вертикальном направлении, так чтобы они могли перемещаться горизонтально при развертывании устройств 32, 33, 36, 37, 38, 42. Например, как показано на фиг. 11, второе нижнее устройство 33 может перемещать вторую нижнюю подушку 35 вертикально, второе поясничное устройство 38 может перемещать вторую поясничную подушку 41 горизонтально, а верхнее устройство 42 может перемещать верхнюю подушку 43 и подушку 44 подголовника горизонтально.
Кроме того, еще, в качестве альтернативы или дополнительно, как проиллюстрировано на фиг. 12A-12B, одно или более устройств 20 горизонтального перемещения, например, могут быть выполнены с возможностью, посредством приводных механизмов 21, перемещать подушки 34, 35, 39, 40, 41, 43, 44 сиденья вперед и назад, то есть, по существу в направлении вдоль или параллельно продольной оси транспортного средства, в качестве альтернативы или дополнительно к вертикальному. То есть, одно или более устройств 20 могут быть предусмотрены в качестве замены для или в качестве дополнения к одному или более устройств 32, 33, 36, 37, 38, 42.
Например, каждое из соответствующих устройств 32, 33, 36, 37, 38, 42 пассивного перемещения может использоваться в качестве устройств вертикального перемещения и может быть спарено с устройством 20 горизонтального перемещения. Например, приводной механизм 21, например, плунжерная или червячная передача, или тому подобное, может приводиться в действие посредством устройства 22 с накопленной энергией, которое, в свою очередь, присоединено к жесткому элементу 23, например, не имеющему свободного движения штоку, чтобы перемещать одну из подушек 34, 35, 39, 40, 41, 43, 44. Пусковой механизм 115a может использоваться для высвобождения энергии из устройства 22 с накопленной энергией, тем самым вызывая перемещение горизонтального приводного механизма 21, заставляющее элемент 23 вытеснять одну из подушек 34, 35, 39, 40, 41, 43, 44 сиденья вперед. В качестве альтернативы или дополнительно, например, возможно по существу одновременно, пусковой механизм или механизмы 115b могут использоваться для развертывания одного из устройств 32, 33, 36, 37, 38, 42, развертывая одну из подушек 34, 35, 39, 40, 41, 43, 44 сиденья вверх.
Фиг. 13 - структурная схема примерной системы 30 шарнирно сочлененных опор по фиг. 9. Система 30 включает в себя элементы, описанные выше касательно системы 10. Кроме того, в системе 30, исполнительные или пусковые механизмы 115, 115a, 115b связаны с устройствами 32, 33, 36, 37, 38, 42 пассивного перемещения. Контроллер 110, таким образом, может отправлять команду или команды на исполнительный механизм 115, как описано выше, например, нагнетательный насос подушки безопасности или камера, включенные в устройства 32, 33, 36, 37, 38, 42 пассивного перемещения, и исполнительный механизм электродвигателя 20, и т.д. для приведения в действие одного или более устройств 32, 33, 36, 37, 38, 42 пассивного перемещения.
Фиг. 22 иллюстрирует примерную последовательность 400 операций, которая может выполняться согласно командам в контроллере 110. Последовательность 400 операций, как описанная в материалах настоящего описания, может выполняться для различных реализаций системы 30, например, включающей в себя все из подушек 34, 35, 39, 40, 41, 43, 44 или некоторое их подмножество. До того, как последовательность 400 операций начинается, одна или более из подушек 18, 19, 34, 35, 39, 40, 41, 43, 44 могут находиться в установленном по умолчанию или номинальном положении. Как описано в материалах настоящего описания, различные из подушек 18, 19, 34, 35, 39, 40, 41, 43, 44 могут перемещаться вперед, назад, вверх и/или вниз относительно номинального положения, например, как описано в отношении последовательности 400 операций.
Последовательность 400 операций может начинаться на этапе 405 блок-схемы, на которой контроллер 110 принимает, например, посредством шины 120, данные с различных датчиков 105. Например, контроллер 110 может принимать данные с датчиков столкновения, таких как измерители ускорения, и тому подобное, датчиков 105 предстоящего столкновения, таких как датчики 105 с радиолокатором, датчики 105 изображения, и т.д., а также датчика 105 занимающего место человека, например, указывающего вес, рост, возраст, и т.д., одного или более занимающих места людей в транспортном средстве, как известно, датчиков сиденья, указывающих положение или положения сиденья, датчиков пряжки ремня безопасности, указывающих состояние ремня безопасности, например, застегнутое или расстегнутое, и т.д.
Затем, на этапе 410 блок-схемы, как правило, на основании данных с датчиков 105 столкновения и/или датчиков 105 предстоящего столкновения, контроллер 110 идентифицирует вид удара при столкновении, например, фронтальный, косой, с неполным перекрытием, на высокой скорости, на низкой скорости, с пешеходом, и т.д.
Затем, на этапе 415 блок-схемы, контроллер 110 выполняет классификацию занимающих места людей, например, известным образом определяет габариты занимающего место человека, например, согласно процентильному весу и/или росту, и т.д.
Затем, на этапе 420 блок-схемы, контроллер 110 определяет текущее положение сиденья 12, например, угол спинки сиденья, относительно основания 14 сиденья, положение сиденья 12 на направляющей сиденья, и т.д.
Затем, на этапе 425 блок-схемы, контроллер 110 определяет состояние пряжки ремня безопасности, например, застегнутое или расстегнутое.
Например, на этапе 430 блок-схемы, с использованием по меньшей мере некоторой из информации, принятой и/или определенной на этапах 405-425 блок-схемы, контроллер 110 определяет шарнирный поворот подкладок, то есть, подушек 34, 35, 39, 40, 41, 43, 44. Как указанно выше, одна или более из подушек 34, 35, 39, 40, 41, 43, 44 могут перемещаться, то есть, шарнирно поворачиваться, например, в случае удара при столкновении. Кроме того, возможно, чтобы одна из подушек 34, 35, 39, 40, 41, 43, 44 может перемещаться горизонтально, вертикально или так и так, тогда как парная подушка 34, 35, 39, 40, 41, 43, 44 может перемещаться иным образом, или вообще не перемещаться. Кроме того, возможно, что одна из подушек 34, 35, 39, 40, 41, 43, 44 может быть частью набора, включающего в себя по меньшей мере две из других подушек 34, 35, 39, 40, 41, 43, 44, каждая из подушек 34, 35, 39, 40, 41, 43, 44 в наборе перемещается совместно, отдельно, в качестве части меньшего набора или не перемещается вообще. Например, первая поясничная подушка 39, центральная поясничная подушка 40 и вторая поясничная подушка 41 могут формировать набор, и, в случае удара при столкновении, любая, все или ни одна из подушек 39, 40, 41 в наборе могут перемещаться горизонтально, вертикально или так и так.
Такое перемещение может определяться контроллером 110 согласно различным факторам, например, скорости транспортного средства, виду удара при столкновении (например, косому, фронтальному, боковому, и т.д.) и габаритам занимающего место человека (например, процентилю массы, веса и/или роста человека по сравнению с населением в целом), положению сиденья, застегнут ли ремень безопасности, положению занимающего место человека в транспортном средстве (например, расположению сиденья), и т.д.
Затем, на этапе 435 блок-схемы, контроллер 110 отправляет сообщение в один или более пусковых механизмов 115, 115a, 115b для приведения в действие пассивных одного или более устройств 32, 33, 36, 37, 38, 42 перемещения и/или одного или более устройств 20 горизонтального перемещения.
Вслед за этапом 435 блок-схемы последовательность 400 операций заканчивается.
Фиг. 14 и 15 иллюстрируют еще один пример системы 50 шарнирно сочлененных опор, которая может быть установлена в сиденье 12 транспортного средства. Система 50 включает в себя множество шарнирно сочлененных подушек сиденья, в том числе, верхнюю подушку 43 и подушку 44 подголовника. Система 30 дополнительно включает в себя множество устройств пассивного перемещения, в том числе верхнее устройство 56 пассивного перемещения и устройство 60 пассивного перемещения подголовника. Более точно, верхнее устройство 56 пассивного перемещения шарнирно поворачивает верхнюю подушку 43, а устройство 60 пассивного перемещения подголовника шарнирно поворачивает подушку 44 подголовника. Несмотря на то, что верхняя подушка 43 и подушка 44 подголовника могут шарнирно поворачиваться одновременно или по существу одновременно, как в системе 30, верхняя подушка 43 и подушка 44 подголовника в системе 50 могут шарнирно поворачиваться независимо. Система 50 может использоваться для поглощения энергии удара при столкновении от головы и/или шеи занимающего место человека во время удара сзади.
Устройства 56, 60 пассивного перемещения соответственно управляют перемещением, например, шарнирным поворотом шарнирно сочлененных подушек 43, 44 сиденья. Устройства 56, 60 пассивного перемещения могут включать в себя любые из многообразия известных компонентов, таких как газонадувная подушка безопасности, надувной пластиковая камера, или тому подобное. Например, подушки 43, 44 сиденья могут перемещаться вверх и вниз, то есть, вертикально, относительно сиденья 12 и транспортного средства, в котором сиденье 12 установлено, посредством надувания устройств 56, 60 пассивного перемещения. Приведение в действие или использование устройств пассивного перемещения может инициироваться пусковым механизмом 115, таким как известный, например, газовым нагнетательным насосом, который приводится в действие пиротехнически, и т.д.
Как показано на фиг. 15, устройство 20 горизонтального перемещения, например, может быть выполнено с возможностью, например, посредством приводных механизмов 21, перемещать верхнюю подушку 43 вперед и назад, то есть, по существу в направлении вдоль или параллельно продольной оси транспортного средства, в качестве альтернативы или дополнительно к вертикальному. Пусковой механизм 115a может использоваться для высвобождения энергии из устройства 22 с накопленной энергией, тем самым вызывая перемещение горизонтального приводного механизма 21, заставляющее элемент 23 развертывать верхнюю подушку 43 вперед. В качестве альтернативы или дополнительно, например, возможно по существу одновременно, пусковой механизм или механизмы 115b могут использоваться для развертывания верхнего устройства 56, развертывающего верхнюю подушку 43 вверх.
Фиг. 16 - структурная схема примерной системы 50 шарнирно сочлененных опор по фиг. 14. Система 50 включает в себя элементы, описанные выше касательно системы 10, как может быть видно. Контроллер 110 может отправлять команду на исполнительный механизм 115, например, нагнетательный насос подушки безопасности или камеры, включенных в устройства 56, 60 пассивного перемещения, исполнительный механизм электродвигателя 20, и т.д. для приведения в действие одно или более устройств 56, 60 пассивного перемещения.
Фиг. 23 иллюстрирует примерную последовательность 500 операций, которая может выполняться согласно командам в контроллере 110. До того, как последовательность 500 операций начинается, одна или более из подушек 43, 44 могут находиться в установленном по умолчанию или номинальном положении. Как описано в материалах настоящего описания, различные из подушек 43, 44 могут перемещаться вперед, назад, вверх и/или вниз относительно номинального положения, например, как описано в отношении последовательности 500 операций.
Последовательность 500 операций может начинаться на этапе 505 блок-схемы, на которой контроллер 110 принимает, например, посредством шины 120, данные с различных датчиков 105. Например, контроллер 110 может принимать данные с датчиков 105 столкновения, таких как измерители ускорения, и тому подобное, датчиков 105 предстоящего столкновения, таких как датчики 105 с радиолокатором, датчики 105 изображения, и т.д., а также датчика 105 занимающего место человека, например, указывающего вес, рост, возраст, и т.д., одного или более занимающих места людей в транспортном средстве, как известно, датчиков сиденья, указывающих положение или положения сиденья, датчиков пряжки ремня безопасности, указывающих состояние ремня безопасности, например, застегнутое или расстегнутое, и т.д.
Затем, на этапе 510 блок-схемы, как правило, на основании данных с датчиков 105 столкновения и/или датчиков 105 предстоящего столкновения, контроллер 110 идентифицирует вид удара при столкновении, например, фронтальный, косой, с неполным перекрытием, на высокой скорости, на низкой скорости, с пешеходом, и т.д.
Затем, на этапе 515 блок-схемы, контроллер 110 выполняет классификацию занимающих места людей, например, известным образом определяет габариты занимающего место человека, например, согласно процентильному весу и/или росту, и т.д.
Затем, на этапе 520 блок-схемы, контроллер 110 определяет текущее положение сиденья 12, например, угол спинки сиденья, относительно основания 14 сиденья, положение сиденья 12 на направляющей сиденья, и т.д.
Затем, на этапе 525 блок-схемы, контроллер 110 определяет состояние пряжки ремня безопасности, например, застегнутое или расстегнутое.
Например, на этапе 530 блок-схемы, с использованием по меньшей мере некоторой из информации, принятой и/или определенной на этапах 505-525 блок-схемы, контроллер 110 определяет шарнирный поворот верхних устройств пассивной безопасности, то есть, подушек 43, 44. Как указанно выше, одна или более из подушек 43, 44 могут перемещаться, то есть, шарнирно поворачиваться, например, в случае удара при столкновении. Кроме того, возможно, что одна из подушек 43, 44 может перемещаться горизонтально, вертикально или так и так, тогда как парная подушка 43, 44 может перемещаться иным образом или вообще не перемещаться.
Такое перемещение может определяться контроллером 110 согласно различным факторам, например, скорости транспортного средства, виду удара при столкновении (например, косому, фронтальному, боковому, и т.д.) и габаритам занимающего место человека (например, процентилю массы, веса и/или роста человека по сравнению с населением в целом), положению сиденья, застегнут ли ремень безопасности, положению занимающего место человека в транспортном средстве (например, расположению сиденья), и т.д.
Затем, на этапе 535 блок-схемы, контроллер 110 отправляет сообщение в один или более пусковых механизмов 115, 115a, 115b для приведения в действие пассивных одного или более устройств 56, 60 перемещения и/или одного или более устройств 20 горизонтального перемещения.
Вслед за этапом 535 блок-схемы последовательность 500 операций заканчивается.
Фиг. 17 и 18 иллюстрируют еще один пример системы 70 шарнирно сочлененных опор, которая может быть установлена в сиденье 12 транспортного средства. Система 70 включает в себя множество шарнирно сочлененных подушек сиденья, в том числе, первую бедренную подушку 18, вторую бедренную подушку 19, первую нижнюю подушку 34, вторую нижнюю подушку 35, первую поясничную подушку 39, центральную поясничную подушку 40, вторую поясничную подушку 41, верхнюю подушку 43 и подушку 44 подголовника. Система 70 дополнительно включает в себя множество устройств пассивного перемещения, в том числе, первое бедренное устройство 16 пассивного перемещения, второе бедренное устройство 17 пассивного перемещения, первое нижнее устройство 32 пассивного перемещения, второе нижнее устройство пассивного перемещения 33, первое поясничное устройство 36 пассивного перемещения, центральное поясничное устройство 37 пассивного перемещения, второе поясничное устройство 38 пассивного перемещения, верхнее устройство 56 пассивного перемещения и устройство 60 пассивного перемещения подголовника. Каждая из шарнирно сочлененных подушек 18, 19, 34, 35, 39, 40, 41, 43, 44 сиденья может быть спарена с соответствующим устройством 16, 17, 32, 33, 36, 37, 38, 56, 60 пассивного перемещения аналогично системе 10, 30, 50. Устройства 16, 17, 32, 33, 36, 37, 38, 56, 60 пассивного перемещения могут быть расположены за соответствующими шарнирно сочлененными подушками 18, 19, 34, 35, 39, 40, 41, 43, 44 сиденья. В этом контексте, «за» означает, что устройство 16, 17, 32, 33, 36, 37, 38, 56, 60 расположено вертикально или горизонтально внутри сиденья 12, так что подушки 18, 19, 34, 35, 39, 40, 41, 43, 44 сиденья обращены в транспортное средство, так чтобы пользователь мог контактировать, например, с подушкой 18, 19, 34, 35, 39, 40, 41, 43, 44 сиденья (или возможно ее чехлом), и устройство 16, 17, 32, 33, 36, 37, 38, 56, 60 находится вертикально под или ниже и/или горизонтально, то есть, относительно продольной оси транспортного средства, за соответствующей подушкой 18, 19, 34, 35, 39, 40, 41, 43, 44, и в целом расположено, чтобы перемещать подушку 18, 19, 34, 35, 39, 40, 41, 43, 44, как описано в материалах настоящего описания. Система 70 может поглощать энергию удара при столкновении от нескольких частей тела занимающих места людей, например, ног и грудной клетки, во время некоторых типов удара, например, косых ударов и ударов сзади.
Устройства 16, 17, 32, 33, 36, 37, 38, 42, 56, 60 пассивного перемещения соответственно управляют перемещением, например, шарнирным поворотом шарнирно сочлененных подушек сиденья. Устройства 6, 17, 32, 33, 36, 37, 38, 42, 56, 60 пассивного перемещения могут включать в себя любые из многообразия известных компонентов, таких как газонадувная подушка безопасности, надувной пластиковая камера, или тому подобное. Например, подушки сиденья могут перемещаться вверх и вниз, то есть, вертикально, относительно сиденья 12 и транспортного средства, в котором сиденье 12 установлено, посредством надувания устройств 16, 17, 32, 33, 36, 37, 38, 42, 56, 60 пассивного перемещения. Приведение в действие или использование устройств 16, 17, 32, 33, 36, 37, 38, 42, 56, 60 пассивного перемещения может инициироваться пусковым механизмом 115, таким как известный, например, газовым нагнетательным насосом, который приводится в действие пиротехнически, и т.д.
Устройства 18, 19, 34, 35, 39, 40, 41, 43, 44 пассивного перемещения могут приводиться в действие независимо друг от друга, а потому, подушки 18, 19, 34, 35, 39, 40, 41, 43, 44 сиденья могут перемещаться, например, шарнирно поворачиваться совместно или независимо друг от друга. Например, первая бедренная подушка 18 и вторая бедренная подушка 19 могут шарнирно поворачиваться вместе одновременно или по существу одновременно в виде набора. В случае удара при столкновении, любая, все или ни одна из подушек 18, 19 в наборе может перемещаться горизонтально, вертикально или так и так. Любая или все из подушек 18, 19, 34, 35, 39, 40, 41, 43, 44 могут быть включены в набор.
Кроме того, подушки 18, 19, 34, 35, 39, 40, 41, 43, 44 сиденья могут шарнирно поворачиваться, например, перемещаться вертикально, независимо от нижней части 14 сиденья. Отметим, что, в настоящем контексте, «вертикально» означает, что механизмы перемещают подушки в целом вверх и вниз относительно нижней части сиденья. Однако, ровно как часть может отклоняться до некоторой степени, например, на вплоть до приблизительно десяти или двадцати градусов, от нахождения идеально горизонтально, вертикальное перемещение подушек 34, 35, 39, 40, 41, 43, 44 так же может отклоняться от нахождения идеально вертикально. Каждое из устройств 16, 17, 32, 33, 36, 37, 38, 42, 56, 60 пассивного перемещения может использоваться в качестве устройств вертикального перемещения и может быть спарено с устройством 20 горизонтального перемещения, как описано выше.
Фиг. 19 - структурная схема примерной системы 10, 30, 50, 70 шарнирно сочлененных опор. Система 70 включает в себя элементы, описанные выше касательно системы 10, как может быть видно. Контроллер 110 может отправлять команду на исполнительный механизм 115, 115a, 115b, например, нагнетательный насос подушки безопасности или камеры, включенные в устройства пассивного перемещения, и исполнительный механизм электродвигателя 20, и т.д. для приведения в действие одного или более устройства 16, 17, 32, 33, 36, 37, 38, 42, 56, 60 пассивного перемещения.
Фиг. 20 иллюстрирует примерную последовательность 200 операций, которая может выполняться согласно командам в контроллере 110. Последовательность 200 операций, как описано в материалах настоящего описания, может выполняться для различных реализаций системы 10, 30, 50, 70, например, включающих в себя все из подушек 18, 19, 34, 35, 39, 40, 41, 43, 44 или некоторое их подмножество, например, включающих в себя только подушки 18 и 19 опоры для бедер и/или одну или более других пар подушек 34, 35, 39, 40, 41, 43, 44. До того, как последовательность 200 операций начинается, одна или более из подушек 18, 19, 34, 35, 39, 40, 41, 43, 44 могут находиться в установленном по умолчанию или номинальном положении. Как описано в материалах настоящего описания, различные из подушек 18, 19, 34, 35, 39, 40, 41, 43, 44 могут перемещаться вперед, назад, вверх и/или вниз относительно номинального положения, например, как описано в отношении последовательности 200 операций.
Последовательность 200 операций может начинаться на этапе 205 блок-схемы, на которой контроллер 110 принимает, например, посредством шины 120, данные с различных датчиков. Например, контроллер 110 может принимать данные с датчиков столкновения, таких как измерители ускорения, и тому подобное, датчиков предстоящего столкновения, таких как датчики с радиолокатором, датчики изображения, и т.д., а также датчиков занимающего место человека, например, указывающих вес, рост, возраст, и т.д., одного или более занимающих места людей в транспортном средстве, как известно, датчиков сиденья, указывающих положение или положения сиденья, датчиков пряжки ремня безопасности, указывающих состояние ремня безопасности, например, с застегнутое или расстегнутое, и т.д.
Затем, на этапе 210 блок-схемы, как правило, на основании данных с датчиков столкновения и/или датчиков предстоящего столкновения, контроллер 110 идентифицирует вид удара при столкновении, например, фронтальный, косой, с неполным перекрытием, на высокой скорости, на низкой скорости, с пешеходом, и т.д.
Затем, на этапе 215 блок-схемы, контроллер 110 выполняет классификацию занимающих места людей, например, известным образом определяет габариты занимающего место человека, например, согласно процентильному весу и/или росту, и т.д.
Затем, на этапе 220 блок-схемы, контроллер 110 определяет текущее положение сиденья 12, например, угол спинки сиденья, относительно основания 14 сиденья, положение сиденья 12 на направляющей сиденья, и т.д.
Затем, на этапе 225 блок-схемы, контроллер 110 определяет состояние пряжки ремня безопасности, например, застегнутое или расстегнутое.
Например, на этапе 230 блок-схемы, с использованием по меньшей мере некоторой из информации, принятой и/или определенной на этапах 205-225 блок-схемы, контроллер 110 определяет шарнирный поворот подушек 18, 19, 34, 35, 39, 40, 41, 43, 4. Как указанно выше, одна или более из подушек 18, 19, 34, 35, 39, 40, 41, 43, 44 могут перемещаться, то есть, шарнирно поворачиваться, например, в случае удара при столкновении. Кроме того, возможно, чтобы одна из подушек 18, 19, 34, 35, 39, 40, 41, 43, 44 могла перемещаться горизонтально, вертикально или так и так, тогда как парная подушка 18, 19, 34, 35, 39, 40, 41, 43, 44 может перемещаться иным образом, или вообще не перемещаться. Кроме того, возможно, что одна из подушек 18, 19, 34, 35, 39, 40, 41, 43, 44 может быть частью набора, включающего в себя по меньшей мере две из других подушек 18, 19, 34, 35, 39, 40, 41, 43, 44, каждая из подушек 18, 19, 34, 35, 39, 40, 41, 43, 44 в наборе перемещается совместно, отдельно, в качестве части меньшего набора или не перемещается вовсе. Например, первая поясничная подушка 39, центральная поясничная подушка 40 и вторая поясничная подушка 41 могут формировать набор, и, в случае удара при столкновении, любая, все или ни одна из подушек 39, 40, 41 в наборе могут перемещаться горизонтально, вертикально или так и так.
Такое перемещение может определяться контроллером 110 согласно различным факторам, например, скорости транспортного средства, виду удара при столкновении (например, косому, фронтальному, боковому, и т.д.) и габаритам занимающего место человека (например, процентилю массы, веса и/или роста человека по сравнению с населением в целом), положению сиденья, застегнут ли ремень безопасности, положению занимающего место человека в транспортном средстве (например, расположению сиденья), и т.д. Например, шарнирный поворот некоторых или всех из подушек 18, 19, 34, 35, 39, 40, 41, 43, 44, например, в качестве части одной или более из систем 10, 30, 50 и 70, мог бы быть определен, как описано в Таблице 1, приведенной ниже:


Затем, на этапе 235 блок-схемы, контроллер 110 отправляет сообщение в один или более пусковых механизмов 115, 115a, 115b для приведения в действие пассивных одного или более устройств 16, 17, 32, 33, 36, 37, 38, 42, 56, 60 перемещения и/или одного или более устройств 20 горизонтального перемещения.
Вслед за этапом 235 блок-схемы последовательность 200 операций заканчивается. Следует понимать, что некоторые этапы последовательности 200 операций могли бы быть пропущены, и/или этапы последовательности 200 операций могли бы выполняться в ином порядке, чем описанный в материалах настоящего описания.
В качестве используемого в материалах настоящего описания, наречие «по существу» означает, что форма, конструкция, размер, количество, время, и т.д., могут отклоняться от точных описанных геометрии, расстояния, размера, количества, времени, и т.д., вследствие изъянов материалов, механической обработки, производства, и т.д.
На чертежах, одинаковые номера ссылок указывают идентичные элементы. Кроме того, некоторые или все из этих элементов могли бы быть изменены. Что касается компонентов, последовательностей операций, систем, способов, и т.д., описанных в материалах настоящего описания, следует понимать, что таковые предусмотрены в целях иллюстрирования определенных вариантов осуществления, и никоим образом не должны интерпретироваться, чтобы ограничивать заявленное изобретение.
Соответственно, следует понимать, что вышеприведенное описание подразумевается иллюстративным, а не ограничивающим. Многие варианты осуществления и применения, иные чем приведенные примеры, были бы очевидны специалистам в данной области техники по прочтению вышеприведенного описания. Объем изобретения не должен определяться на основании вышеприведенного описания, но взамен, должен определяться на основании прилагаемой формулы изобретения наряду с полным объемом эквивалентов, на которые управомочена такая формула изобретения. Ожидается и подразумевается, что будущие усовершенствования будут происходить в областях техники, обсужденных в материалах настоящего описания, и что раскрытые системы и способы будут заключены в таких будущих вариантах осуществления. Подводя итог вышесказанному, следует понимать, что изобретение является допускающим модификацию и изменение, и ограничено исключительно следующей формулой изобретения.
Все термины, используемые в формуле изобретения, подразумеваются обусловленными своими очевидными и обычными значениями в качестве понятных специалистам в данной области техники, если в материалах настоящего описания не сделано явное указание на обратное. В частности, использование форм единственного числа «указанный», и т.д., должно читаться излагающим один или более из указанных элементов, если пункт формулы изобретения не излагает явное ограничение иначе.
Реферат
Группа изобретений относится к системе обеспечения безопасности транспортного средства, способу обеспечения безопасности и контроллеру системы обеспечения безопасности транспортного средства. Система обеспечения безопасности содержит первую и вторую подушки, которые выполнены с возможностью расположения в сиденье транспортного средства. Множество устройств пассивного перемещения выполнены с возможностью соответствующего расположения за подушками и с возможностью вызывать их перемещение. Устройства пассивного перемещения выполнены с возможностью приведения в действие независимо друг от друга. Обеспечивается повышение безопасности. 3 н. и 17 з.п. ф-лы, 23 ил.
Комментарии