Устройство защиты пассажира - RU2442707C1
Код документа: RU2442707C1
Чертежи








Описание
Область техники
Настоящее изобретение относится к устройству защиты пассажира и, в частности, относится к устройству защиты пассажира, которое защищает пассажира транспортного средства в то время, когда прогнозируется опасная ситуация около транспортного средства.
Уровень техники
Были предложены различные технологии для защитных устройств пассажира, которые обнаруживают опасность для транспортного средства и защищают пассажира транспортного средства, такие как технология, описанная в публикации выложенной заявки на патент Японии JP 2005-271889 (A).
В технологии, описанной в JP 2005-271889, предложено, чтобы прогнозирование столкновения осуществлялось на основе расстояния между транспортным средством субъекта и транспортным средством, следующим за ним, и когда измеренное расстояние равно или меньше, чем заданное значение, и прогнозируется, что столкновение произойдет после заданного времени, и когда угол спинки кресла не равен или больше, чем заданное значение, угол его наклона поднимается до заданного значения и, кроме того, передний край подушки сиденья понижается, причем после столкновения передний край подушки сиденья поднимается.
Тем не менее в технологии, описанной в JP 2005-271889, в то время как пассажир транспортного средства соответственно ограничен в движении ремнем безопасности в порядке подготовки к столкновению, есть возможность того, что будет поддерживаться высокая степень ограничения в движении, когда удастся избежать опасной ситуации, вызывая дискомфорт пассажира транспортного средства. Соответственно, существует необходимость для усовершенствования этой технологии.
Краткое описание изобретения
Согласно первому аспекту изобретения создано устройство защиты пассажира, содержащее: блок определения, который определяет, находится ли транспортное средство в опасной ситуации, исходя из результата обнаружения, следующего из блока обнаружения, который обнаруживает опасные ситуации вблизи транспортного средства; блок перемещения, который перемещает относительное взаимное расположение между ремнем безопасности, который ограничивает пассажира транспортного средства, и пассажиром транспортного средства; и блок управления, который управляет блоком перемещения, чтобы отделить пассажира транспортного средства от ремня безопасности, когда блоком определения решено, что опасную ситуацию удалось избежать, после того, как блоком определения было решено, что транспортное средство находится в опасной ситуации.
Краткое описание чертежей
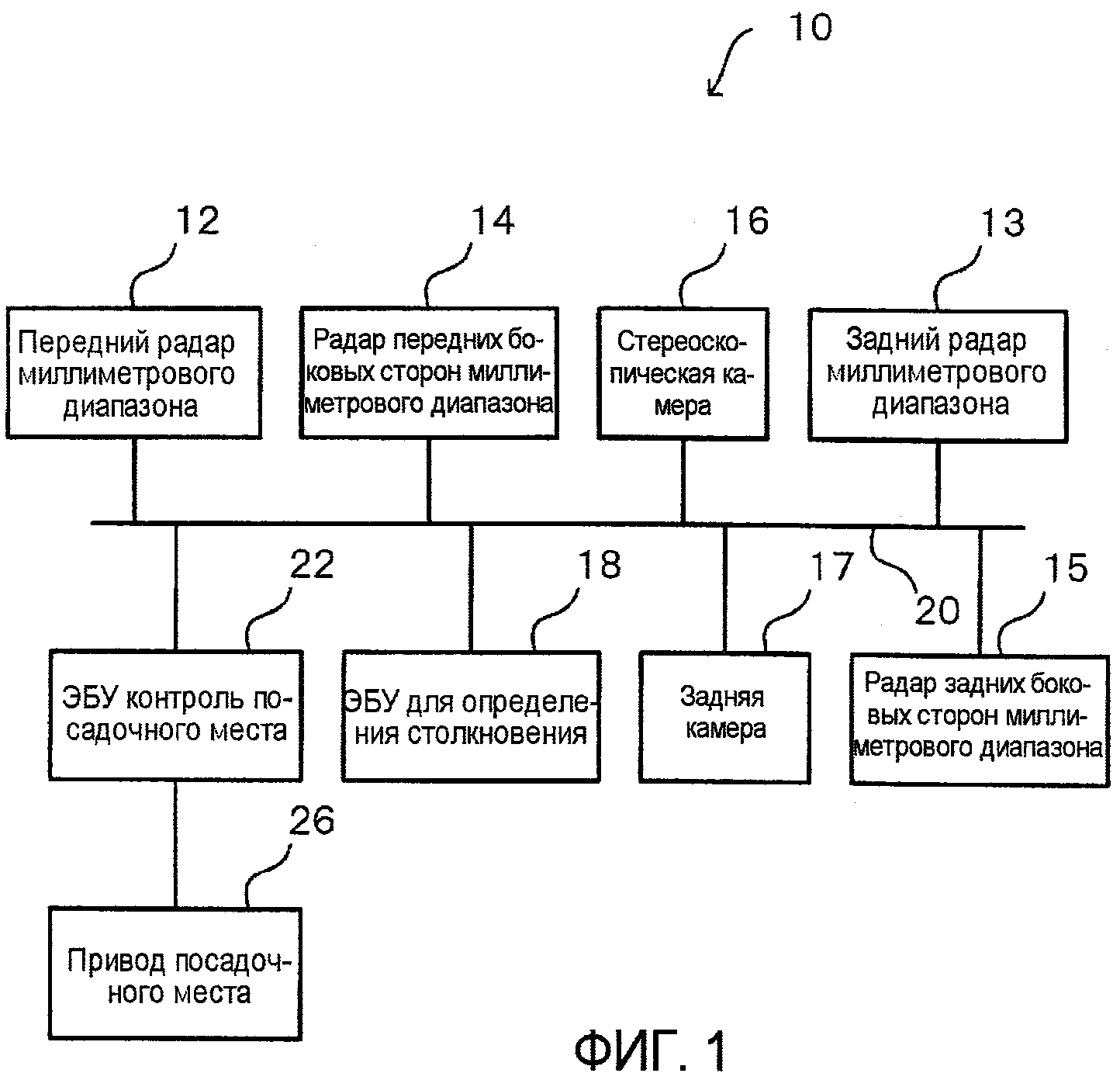
Фиг.1 - блок-схема, иллюстрирующая конфигурацию устройства защиты пассажира согласно примерному варианту осуществления настоящего изобретения;
фиг.2 - чертеж, иллюстрирующий пример регулирования посадочного места (регулирования наклона);
фиг.3 - блок-схема, иллюстрирующая пример потока обработки, выполненной в электронном блоке управления (ЭБУ) определения столкновения устройства защиты пассажира согласно примерному варианту осуществления настоящего изобретения;
фиг.4 - блок-схема, иллюстрирующая пример потока обработки, выполненной в ЭБУ контроля посадочного места устройства защиты пассажира согласно примерному варианту осуществления настоящего изобретения;
фиг.5 - чертеж, иллюстрирующий регулирование посадочного места устройством защиты пассажира согласно примерному варианту осуществления настоящего изобретения;
фиг.6A - чертеж, иллюстрирующий первый пример другой конфигурации регулирования посадочного места в направлении, которое отодвигает пассажира транспортного средства от ремня безопасности;
фиг.6B - чертеж, иллюстрирующий второй пример другой конфигурации регулирования посадочного места в направлении, которое отодвигает пассажира транспортного средства от ремня безопасности;
фиг.6C - чертеж, иллюстрирующий третий пример другой конфигурации регулирования посадочного места в направлении, которое отодвигает пассажира транспортного средства от ремня безопасности;
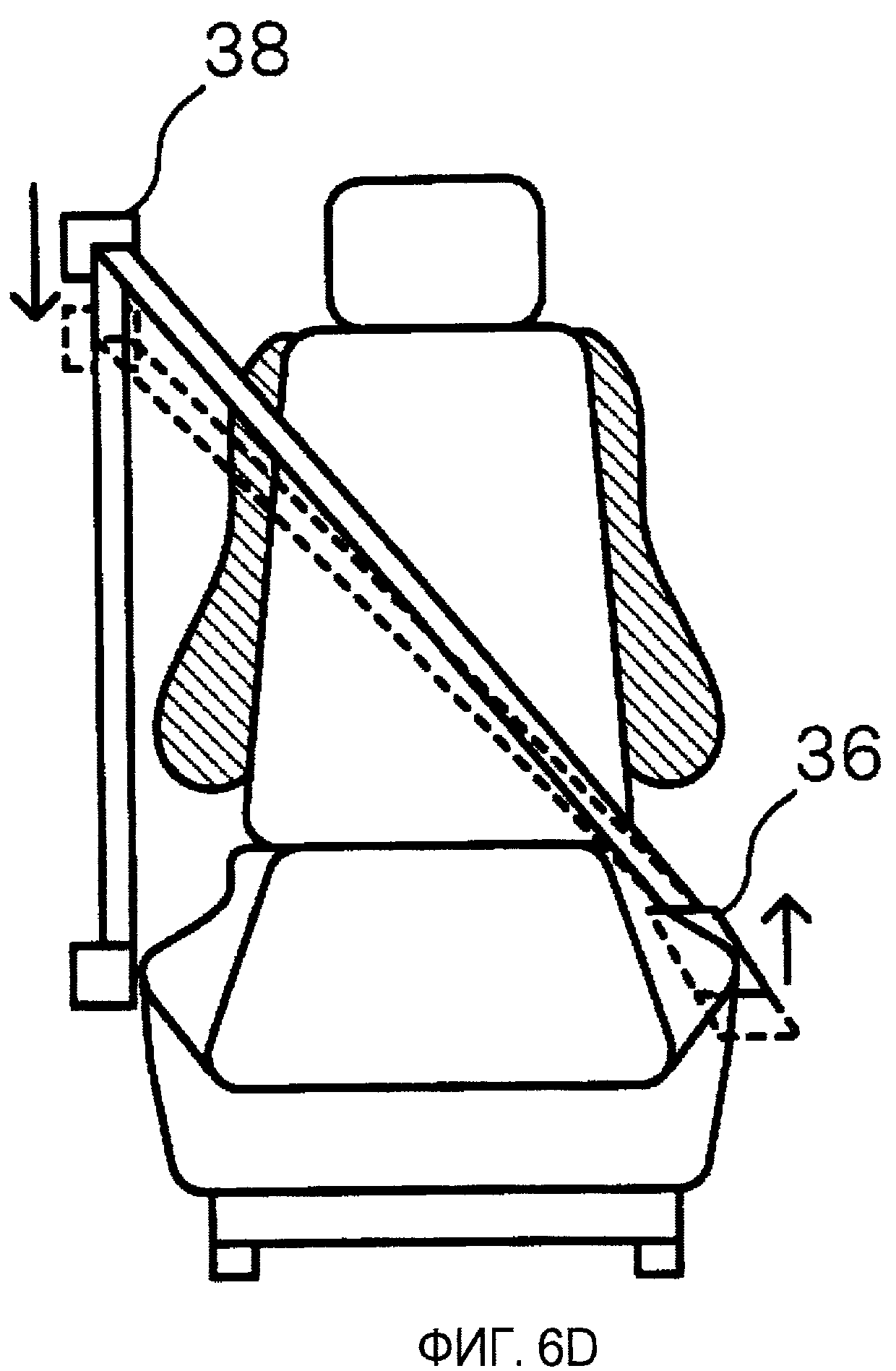
фиг.6D - чертеж, иллюстрирующий четвертый пример другой конфигурации регулирования крепления ремня безопасности в направлении, которое отодвигает ремень безопасности от пассажира транспортного средства; и
фиг.6E - чертеж, иллюстрирующий пример случая, при котором прекращает действовать ограничение пассажира транспортного средства.
Предпочтительные варианты осуществления изобретения
В следующем типовом варианте осуществления настоящее изобретение подробно объясняется со ссылками на чертежи. Фиг.1 представляет собой блок-схему, иллюстрирующую конфигурацию устройства защиты пассажира в соответствии с типовым вариантом осуществления настоящего изобретения.
Как показано на фиг.1, устройство 10 защиты пассажира в соответствии с примерным вариантом осуществления настоящего изобретения оснащено передним радаром 12 миллиметрового диапазона для того, чтобы определить расстояние до препятствия впереди, радаром 14 передних боковых сторон миллиметрового диапазона для того, чтобы определить расстояние до препятствия с передних боковых сторон, стереоскопической камерой 16, которая захватывает изображения спереди, задним радаром 13 миллиметрового диапазона для того, чтобы определить расстояние до препятствия сзади, радаром 15 задних боковых сторон миллиметрового диапазона для того, чтобы определить расстояние до препятствия с задних боковых сторон, задней камерой 17, которая захватывает изображения сзади, ЭБУ 18 для определения столкновения, который прогнозирует столкновение, и ЭБУ 22 контроля посадочного места, который управляет состоянием посадочного места, когда прогнозируется столкновение, причем все они связаны шиной 20.
Передний радар 12 миллиметрового диапазона, радар 14 передних боковых сторон миллиметрового диапазона, стереоскопическая камера 16, задний радар 13 миллиметрового диапазона, радар 15 задних боковых сторон миллиметрового диапазона и задняя камера 17 контролируют область вблизи транспортного средства и выдают результаты наблюдения в ЭБУ 18 для определения столкновения.
Передний радар 12 миллиметрового диапазона предусмотрен, например, в центральной части передней решетки, а радар 14 передних боковых сторон миллиметрового диапазона предусмотрен в бампере около каждого из его концов вдоль ширины транспортного средства. Передний радар 12 миллиметрового диапазона и радар 14 передних боковых сторон миллиметрового диапазона предусмотрены для того, чтобы, соответственно, испускать миллиметровые волны в переднюю и передние боковые стороны транспортного средства, получать радиоволны, отраженные от целевого объекта, и измерять расстояние до целевого объекта и его относительную скорость относительно транспортного средства субъекта и т.п. на основе, например, времени передачи или разности частот, произведенной эффектом Доплера. Далее задний радар 13 миллиметрового диапазона и радар 15 задних боковых сторон миллиметрового диапазона предусмотрены в заднем бампере или т.п. Задний радар 13 миллиметрового диапазона и радар 15 задних боковых сторон миллиметрового диапазона предусмотрены для того, чтобы соответственно испускать миллиметровые волны в задние и в задние боковые стороны транспортного средства, получать радиоволны, отраженные от целевого объекта, и измерять расстояние до целевого объекта, его скорость относительно транспортного средства субъекта и т.п. на основе, например, времени передачи или разницы частот, произведенных эффектом Доплера.
Стереоскопическая камера 16 предусмотрена, например, внутри транспортного средства в центральном местоположении наверху переднего ветрового стекла. Стереоскопическая камера 16 предусмотрена для того, чтобы захватывать изображения впереди транспортного средства и обнаруживать окружающие препятствия, а также измерять расстояние до препятствия. Задняя камера 17 предусмотрена, например, внутри транспортного средства в центральном местоположении наверху заднего ветрового стекла. Задняя камера 17 предусмотрена для того, чтобы захватывать изображения сзади транспортного средства и обнаруживать окружающие препятствия, а также измерять расстояние до препятствия. Далее стереоскопическая камера 16 и задняя камера 17 могут быть опущены из конфигурации изобретения, потому что расстояние до препятствия может быть измерено передним радаром 12 миллиметрового диапазона, радаром 14 передних боковых сторон миллиметрового диапазона, задним радаром 13 миллиметрового диапазона, радаром 15 задних боковых сторон миллиметрового диапазона или т.п.
ЭБУ 18 для определения столкновения собирает результаты обнаружения переднего радара 12 миллиметрового диапазона, радара 14 передних боковых сторон миллиметрового диапазона, стереоскопической камеры 16, заднего радара 13 миллиметрового диапазона, радара 15 задних боковых сторон миллиметрового диапазона и задней камеры 17 и выполняют прогнозирование столкновения. Прогнозирование столкновения может быть выполнено с помощью применения различных известных технологий, и поэтому подробное объяснение этого процесса опущено.
Далее ЭБУ 22 контроля посадочного места соединен с приводом 26 посадочного места, который предназначен для того, чтобы регулировать различные состояния посадочного места. Когда столкновение прогнозируется ЭБУ 18 определения столкновения, ЭБУ 22 контроля посадочного места контролирует работу привода 26 посадочного места, регулирует механизм наклона посадочного места и скользящий механизм посадочного места и регулирует состояние посадочного места в заданное соответствующее состояние (соответствующий диапазон) до столкновения. В настоящем варианте осуществления, как показано на фиг.2, угол наклона спинки кресла посадочного места 34 регулируется таким образом, чтобы спинки кресла были откинуты в заданное целевое положение (целевой диапазон).
Далее когда изменение в состоянии посадочного места 34 управляется выключателем или т.п. (не показано), ЭБУ 22 контроля посадочного места управляет приводом 26 посадочного места в соответствии с состоянием операции выключателя и изменяет состояние посадочного места в виде понижения посадочного места или наклона, или т.п.
В данном случае в защитном устройстве 10 пассажира согласно настоящему варианту осуществления ЭБУ 18 для определения столкновения собирает соответствующие результаты анализа среды от переднего радара 12 миллиметрового диапазона, радара 14 передних боковых сторон миллиметрового диапазона, стереоскопической камеры 16, заднего радара 13 миллиметрового диапазона, радара 15 задних боковых сторон миллиметрового диапазона и задней камеры 17 и выполняет прогнозирование столкновения, причем прогнозирование столкновения состоит, например, из определения относительной скорости, исходя из изменений расстояния до объекта и вычисления времени до столкновения. Тогда, когда оцененное расчетное время столкновения t является меньшим, чем заданное время, оно берется для обнаружения опасности. Далее в настоящем варианте осуществления, когда опасность обнаружена, состояние посадочного места регулируется до соответствующего состояния (соответствующего диапазона). Конкретнее, с точки зрения регулирования посадочного места, угол наклона спинки кресла регулируется путем управления приводом таким образом, чтобы угол наклона спинки кресла, то есть угол наклона, был регулируемым в соответствующем диапазоне (целевом диапазоне), и ограничения ремнем безопасности, соответственно осуществляемых во время столкновения.
Тем не менее, если после того, как опасность обнаружена с помощью ЭБУ 18 определения столкновения, опасности избегаются, поскольку натянутость ремня безопасности была увеличена регулированием состояния посадочного места, и это состояние поддерживается ограничением ремня безопасности, пассажиру транспортного средства приходится испытывать дискомфорт. Поэтому в настоящем варианте осуществления после того, как опасности удалось избежать, положения ремня безопасности и пассажира транспортного средства изменяются друг относительно друга в направлении, которое увеличивает расстояние между ремнем безопасности и пассажиром транспортного средства. В частности, в настоящем варианте осуществления положения ремня безопасности и пассажира транспортного средства перемещаются друг относительно друга, регулируя угол спинки кресла в направлении таким образом, чтобы спинки кресла был понижены до данного угла. В результате состояние ограничения ремня безопасности ослабляется после ухода от опасности, так что может быть уменьшен дискомфорт пассажира транспортного средства.
Далее будет подробно описана обработка данных в соответствующих ЭБУ в защитном устройстве 10 пассажира, согласно варианту осуществления настоящего изобретения, сконфигурированного так, как описано выше.
Сначала объясняется обработка, выполненная в ЭБУ 18 определения столкновения. Фиг.3 представляет собой блок-схему, иллюстрирующую пример потока обработки, выполненного в ЭБУ 18 определения столкновения устройства 10 защиты пассажира согласно варианту осуществления настоящего изобретения. Далее обработка по фиг.3 объясняется с точки зрения начала, когда выключатель зажигания (не показан) включен, и окончания, когда выключатель зажигания выключен, или когда происходит столкновение.
На этапе 100 вводится расстояние до переднего препятствия, и далее обработка продолжается на этапе 102. Таким образом, вводятся результаты обнаружения переднего радара 12 миллиметрового диапазона, радара 14 передних боковых сторон миллиметрового диапазона, стереоскопической камеры 16 и т.п.
На этапе 102 вычисляется относительная скорость, и далее обработка продолжается на этапе 104. Например, относительная скорость вычисляется от расстояния до переднего препятствия, обнаруженного на равномерных интервалах радаром миллиметрового диапазона (передним радаром 12 миллиметрового диапазона, радаром 14 передних боковых сторон миллиметрового диапазона или им подобным устройством).
На этапе 104 результаты обнаружения из радара миллиметрового диапазона вводятся снова, и далее обработка продолжается на этапе 106.
На этапе 106 вычисляется время t до столкновения, и далее обработка возвращается на этапе 100, и обработка, описанная выше, повторяется. Таким образом, время t до столкновения вычислено на основе расстояния до переднего препятствия, обнаруженного передним радаром 12 миллиметрового диапазона, радаром 14 передних боковых сторон миллиметрового диапазона, стереоскопической камерой 16 и т.п. и относительной скорости, вычисленной на этапе 102, после чего обработка возвращается на этап 100, и вышеописанная обработка повторяется.
Далее объясняется обработка, выполненная в ЭБУ контроля посадочным местом. Фиг.4 представляет собой блок-схему, раскрывая пример потока обработки, выполненной в ЭБУ 22 контроля посадочного места устройства 10 защиты пассажира согласно варианту осуществления настоящего изобретения. Далее объясняется обработка согласно фиг.4 с точки зрения начала, когда выключатель зажигания (не показан) включен, и окончания, когда выключатель зажигания выключен или когда происходит столкновение.
На этапе 200 вводится оценочное время столкновения t, вычисленное ЭБУ 18 определения столкновения, и далее обработка продолжается на этапе 202.
На этапе 202 определяется, является ли предполагаемое время столкновения t меньшим, чем заданное время t1, и когда ответ является утвердительным, обработка продолжается на этапе 204, а когда определение отрицательно, обработка продолжается на этапе 216.
На этапе 204 происходит определение относительно того, находится ли посадочное место в процессе регулирования. Это определение оценивает, работает ли привод 26 посадочного места из-за времени столкновения, меньшего, чем t1, которое уже было достигнуто, и когда определение отрицательно, обработка продолжается на этапе 206, и когда определение является утвердительным, обработка продолжается на этапе 214.
На этапе 206 начинается регулирование посадочного места с операции регулирования привода 26 посадочного места, и далее обработка продолжается на этапе 208. Таким образом, угол наклона спинки кресла регулируется таким образом, чтобы достигнуть заданного целевого угла (целевого диапазона).
На этапе 208 выполняется определение относительно того, удалось ли избежать опасности. В определении предполагаемое время столкновения t вводится снова из ЭБУ 18 определения столкновения, определяется, является ли введенное оценочное время столкновения t большим, чем предыдущее оценочное время столкновения, и это определяет, присутствует ли еще препятствие, и предполагаемое время столкновения было очищено, и т.п. Когда определение является утвердительным, обработка продолжается на этапе 210, и когда определение отрицательно, обработка продолжается на этапе 214.
На этапе 210 заданное количество регулирований посадочного места выполняется в направлении, в котором двигается пассажир транспортного средства от ремня безопасности, и далее обработка продолжается на этапе 212. Таким образом, в настоящем варианте осуществления спинка кресла регулируется определенным углом в направлении ослабления ремня безопасности. В результате, когда опасности удалось избежать, состояние ограничения ремнем безопасности облегчается, посредством чего дискомфорт пассажира транспортного средства уменьшается путем обеспечения поддержания ремня безопасности в невысокой напряженности.
Тогда на этапе 212 регулирование посадочного места заканчивается, и далее обработка возвращается на этап 200, и вышеописанная обработка повторяется.
Далее когда определение на этапе 204 является утвердительным, то есть когда оценочное время столкновения t меньше, чем t1, опасность была обнаружена, и регулирование посадочного места было уже начато, обработка продолжается на этапе 214. На этапе 214 определение сделано в отношении того, лежит ли целевой угол, то есть угол спинки кресла, в заданном целевом диапазоне. Когда определение отрицательно, обработка возвращается на этап 200, и вышеописанная обработка повторяется, и когда утвердительно, обработка продолжается на этапе 212. На этапе 212 заканчивается регулирование посадочного места. Далее определение относительно достижения целевого угла может быть определено из количества регулирований привода 26 посадочного места, с помощью обеспечения датчика, который обнаруживает наклонный угол, и с помощью определения угла, исходя из значения обнаружения датчика, или с помощью обеспечения конечного выключателя под соответствующим заданным углом, и определяя, включен ли выключатель.
Далее когда определение на этапе 202 является отрицательным, то есть когда оценочное время столкновения t равно или превышает t1, обработка продолжается на этапе 216. На этапе 216 определение делается в отношении того, доступен ли отчет регулирования посадочного места. Это определение определяет после обнаружения опасности утвердительные определения на этапах 204 и 214 и завершения регулирования посадочного места целевого угла, поддерживается ли спинка кресла под целевым углом. Когда определение отрицательно, обработка возвращается на этап 200, и вышеописанная обработка повторяется, и, если утвердительно, обработка продолжается на этапе 210. Таким образом, когда после того, как опасность обнаружена, место было уже отрегулировано до целевого угла и остается в этом состоянии, и далее опасность избегается, выполняется заданное количество регулирований посадочного места, которое отодвигает пассажира транспортного средства от ремня безопасности, посредством чего состояние ограничения ремня безопасности облегчается так, что ремень безопасности не поддерживается с высоким натяжением, так что в результате может быть уменьшен дискомфорт для пассажира транспортного средства.
Выполняя этот вид обработки в ЭБУ определения столкновения 18 и ЭБУ 22 контроля посадочного места, как показано на фиг.5, регулирование посадочного места выполняется в точке, в которой обнаруживается опасность (точка, в которой оценочное время столкновения t становится меньше t1), и угол поддерживается в точке, в которой он становится целевым углом. После того, как опасности удалось избежать, поскольку посадочное место было отрегулировано в направлении, которое отодвигает пассажира транспортного средства от ремня безопасности, состояние ограничения ремня безопасности облегчается, состояние, в котором ремень безопасности поддерживается с высоким натяжением, не поддерживается после того, как опасности удалось избежать, и дискомфорт пассажира транспортного средства может быть снижен.
В варианте осуществления, описанном выше, выполняется регулирование посадочного места, когда опасность была обнаружена, и, когда опасности удалось избежать, регулирование посадочного места (регулирование угла наклона) выполняется в направлении, которое отодвигает пассажира транспортного средства от ремня безопасности. Тем не менее примеры конфигураций для регулирования в направлении, которое отодвигает пассажира транспортного средства от ремня безопасности, не ограничиваются регулированием угла наклона посадочного места. Например, как показано на фиг.6A, может быть предусмотрен привод для того, чтобы двигать посадочное место 34 вперед и назад относительно транспортного средства, причем посадочное место может скользить в направлении назад. В качестве альтернативы, как показано на фиг.6B, может быть предусмотрен привод для того, чтобы перемещать посадочное место 34 или подушку посадочного места 34A в перпендикулярном направлении относительно поверхности пола транспортного средства, причем посадочное место 34 или подушка посадочного места 34A сдвигаются вниз. В качестве альтернативы, как показано на фиг.6C, может быть предусмотрен привод для того, чтобы отрегулировать поясничную часть 34B спинки кресла, соответствующую поясничной области пассажира транспортного средства, и место отрегулировано в направлении таким образом, чтобы поясничная часть 34B спинки кресла раскладывалась назад (регулирование части спинки кресла, соответствующей поясничной области пассажира транспортного средства). В качестве альтернативы, как показано на фиг.6D, может быть предусмотрен привод для движущегося крепления 36 ремня безопасности в перпендикулярном направлении относительно поверхности пола транспортного средства, и крепление 36 ремня безопасности перемещено вверх. В качестве альтернативы, как показано на фиг.6D, может быть предусмотрен привод для движущегося крепления 38 плечевого ремня безопасности в части стойки кузова ремня безопасности в вертикальном направлении относительно транспортного средства, и крепление 38 плечевого ремня сдвинуто вниз. Далее соответствующие регуляторы посадочного места и регуляторы крепления ремня безопасности могут быть соответственно объединены.
Далее в варианте осуществления, описанном выше, регулирование посадочного места выполняется, когда опасность была обнаружена, и, когда опасности удалось избежать, регулирование посадочного места (регулирование угла наклона) выполняется в направлении, которое отодвигает пассажира транспортного средства от ремня безопасности. Однако когда опасности удалось избежать, состояние ограничения пассажира транспортного средства может быть облегчено. Например, как показано на фиг.6E, когда подголовник 34C посадочного места 34 продвигается вперед при обнаружении опасности, состояние ограничения пассажира транспортного средства может быть облегчено, когда опасности удалось избежать, так что подголовник 34C сдвигается назад. Кроме того, может быть предусмотрен привод для того, чтобы регулировать натяжение ремня безопасности и состояние ограничения пассажира транспортного средства, за счет уменьшения натяжения ремня безопасности, так что уменьшается дискомфорт для пассажира транспортного средства.
Далее в варианте осуществления, описанном выше, было сделано объяснение, используя пример устройства защиты пассажира, которое выполняет регулирование посадочного места, когда опасность обнаружена, хотя вариант осуществления этим не ограничивается. Например, когда опасность обнаружена, ограничение пассажира транспортного средства ремнем безопасности вообще выполняется в результате управления тормозами пассажира транспортного средства или чем-то подобным. В результате в защитном устройстве пассажира, которое не выполняет регулирование посадочного места, когда опасность обнаружена, также состояние ограничения ремнем безопасности поддерживается даже после того, как опасности удалось избежать, вызывая дискомфорт пассажира транспортного средства. Здесь положения ремня безопасности и пассажира транспортного средства могут быть перемещены друг относительно друга после того, как опасности удалось избежать, чтобы отодвинуть пассажира транспортного средства от ремня безопасности. Таким образом, ограничение ремнем безопасности не поддерживается после того, как опасности удалось избежать, и дискомфорт пассажира транспортного средства может быть снижен.
Дополнительно, в варианте осуществления, описанном выше, опасность обнаруживается как впереди, так и сзади, однако вариант осуществления этим не ограничивается. Например, обнаружение может быть сделано только в одном из направлений. Таким образом, могут быть предусмотрены либо передний радар 12 миллиметрового диапазона, радар 14 передних боковых сторон миллиметрового диапазона и стереоскопическая камера 16, либо задний радар 13 миллиметрового диапазона, радар 15 задних боковых сторон миллиметрового диапазона и задняя камера 17, так что опасность может обнаруживаться либо спереди, либо сзади.
Реферат
Группа изобретений относится к предохранительным устройствам, обеспечивающим безопасность пассажиров транспортного средства. Когда по оценочному времени столкновения опасность обнаружена, посадочное место регулируется для того, чтобы установить угол наклона спинки кресла в пределах заданного соответствующего диапазона. После того, как опасности удалось избежать, угол наклона спинки кресла регулируется так, чтобы пассажир был отделен от ремня безопасности. Это устраняет ситуации, при которых натяжение ремня безопасности сохраняется повышенным даже после того, как опасности удалось избежать, в результате причиняя неудобство пассажиру. Применение предложенного устройства вызывает меньший дискомфорт пассажира после того, как опасности удалось избежать. 2 н. и 8 з.п. ф-лы, 10 ил.
Формула
блок определения, который определяет, находится ли транспортное средство в опасной ситуации, исходя из результата обнаружения, следующего из блока обнаружения, который обнаруживает опасные ситуации вблизи транспортного средства;
блок перемещения, который содержит блок регулирования посадочного места, который регулирует состояние посадочного места, и перемещает относительное взаимное расположение между ремнем безопасности, который ограничивает пассажира транспортного средства, и пассажиром транспортного средства; и
блок управления, который управляет блоком перемещения посредством регулирования состояния посадочного места, чтобы отделить пассажира транспортного средства от ремня безопасности, когда блоком определения решено, что опасную ситуацию удалось избежать, после того, как блоком определения было решено, что транспортное средство находится в опасной ситуации.
блок определения, который определяет, находится ли транспортное средство в опасной ситуации, исходя из результата обнаружения блока обнаружения, который обнаруживает опасные ситуации вблизи транспортного средства;
блок регулирования, который содержит блок регулирования посадочного места, который регулирует состояние посадочного места, и регулирует состояние ограничения пассажира транспортного средства; и
блок управления, который управляет блоком регулирования посредством регулирования состояния посадочного места, чтобы облегчить состояние ограничения, когда блоком определения решено, что опасную ситуацию удалось избежать, после того, как блоком определения было решено, что транспортное средство находится в опасной ситуации.
Комментарии