Способ для наблюдения за салоном транспортного средства - RU2720849C2
Код документа: RU2720849C2
Чертежи
Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к способу для наблюдения за салоном транспортного средства.
Уровень техники
[0001] Современные транспортные средства обнаруживают людей в салоне транспортного средства с помощью множества способов. В некоторых примерах салон имеет цифровую камеру или датчик давления сиденья транспортного средства, чтобы обнаруживать водителя, сидящего на водительском сиденье.
Сущность изобретения
В одном варианте осуществления охарактеризован способ, содержащий этапы, на которых: принимают данные изображения, которые включают в себя сиденье транспортного средства и пассажира в салоне транспортного средства; определяют, с помощью принятых данных, ориентацию сиденья и ориентацию пассажира; и выполняют функцию транспортного средства на основе определения.
В дополнительном варианте осуществления данные принимаются от датчика, который установлен в салоне транспортного средства.
В дополнительном варианте осуществления данные принимаются от, по меньшей мере, одного устройства лазерной системы обнаружения и измерения дальности.
В дополнительном варианте осуществления с помощью принятых данных, определяют позицию сиденья транспортного средства и затем выполняют функцию, по меньшей мере, частично на основе позиции сиденья.
В дополнительном варианте осуществления функция включает в себя запрет развертывания подушки безопасности из модуля управления системой пассивной безопасности.
В дополнительном варианте осуществления запрет развертывания основывается на ориентации пассажира относительно сиденья.
В дополнительном варианте осуществления функция включает в себя перемещение, наклон, поворот сиденья или их сочетание.
В дополнительном варианте осуществления функция включает в себя совмещение оси сиденья с первичным направлением силы (PDOF) прогнозируемого события столкновения.
В дополнительном варианте осуществления функция включает в себя управление направленностью воздушного вентилятора или звукового динамика в салоне.
В еще одном варианте осуществления охарактеризован способ, содержащий этапы, на которых: определяют, с помощью данных изображения, ориентацию пассажира транспортного средства относительно сиденья транспортного средства; определяют надвигающееся событие столкновения; и управляют перемещением сиденья на основе определений.
В дополнительном варианте осуществления данные принимаются, по меньшей мере, от одного устройства лазерной системы обнаружения и измерения дальности, расположенного в салоне транспортного средства.
В дополнительном варианте осуществления на основе определений, запрещают развертывание подушки безопасности из модуля управления системой пассивной безопасности в ответ на событие столкновения.
В дополнительном варианте осуществления функция включает в себя перемещение, наклон, поворот сиденья или их сочетание.
В еще одном варианте осуществления охарактеризован компьютер, запрограммированный, чтобы исполнять способ по любому из предыдущих пунктов.
В еще одном варианте осуществления охарактеризован компьютерный программный продукт, содержащий компьютерно-читаемый носитель, хранящий инструкции, исполняемые процессором компьютера, чтобы исполнять способ по любому из предыдущих пунктов.
Краткое описание чертежей
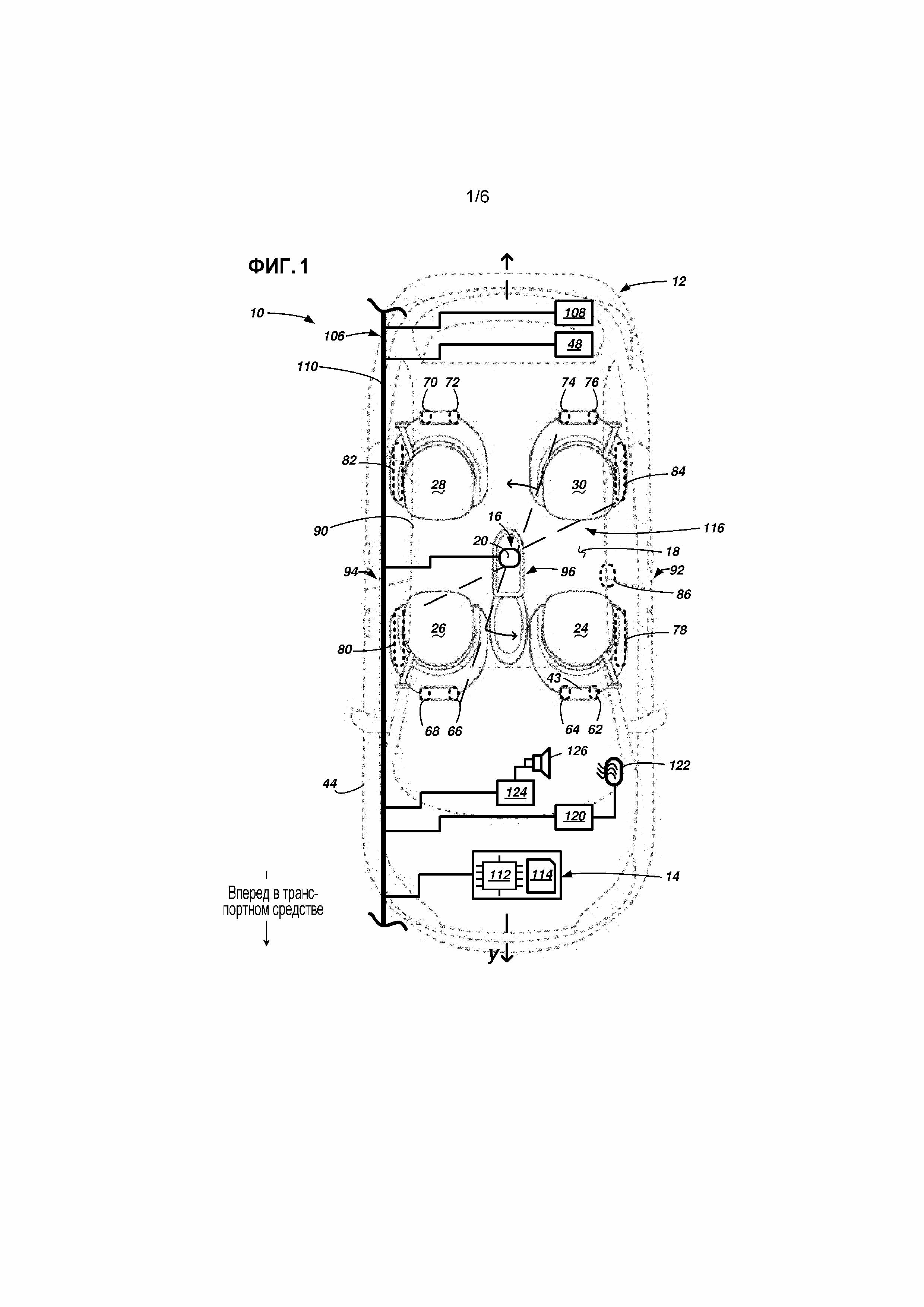
[0002] Фиг. 1 - это схематичный вид сверху транспортного средства, имеющего систему наблюдения за салоном.
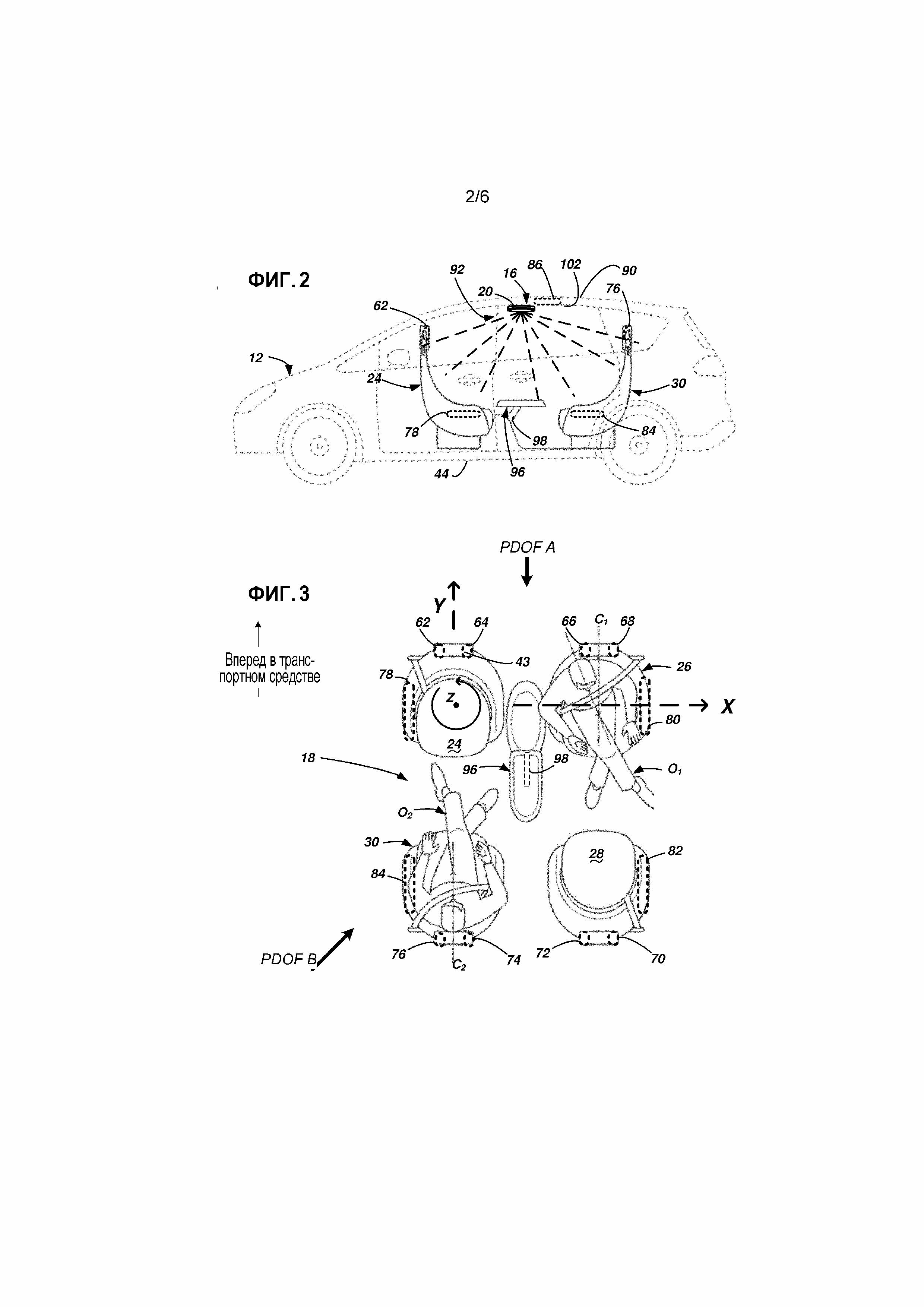
[0003] Фиг. 2 - это схематичный вид сбоку транспортного средства, показанного на фиг. 1.
[0004] Фиг. 3 - это вид сверху сидений транспортного средства, показанного на фиг. 1, каждое из двух сидений транспортного средства содержит пассажира.
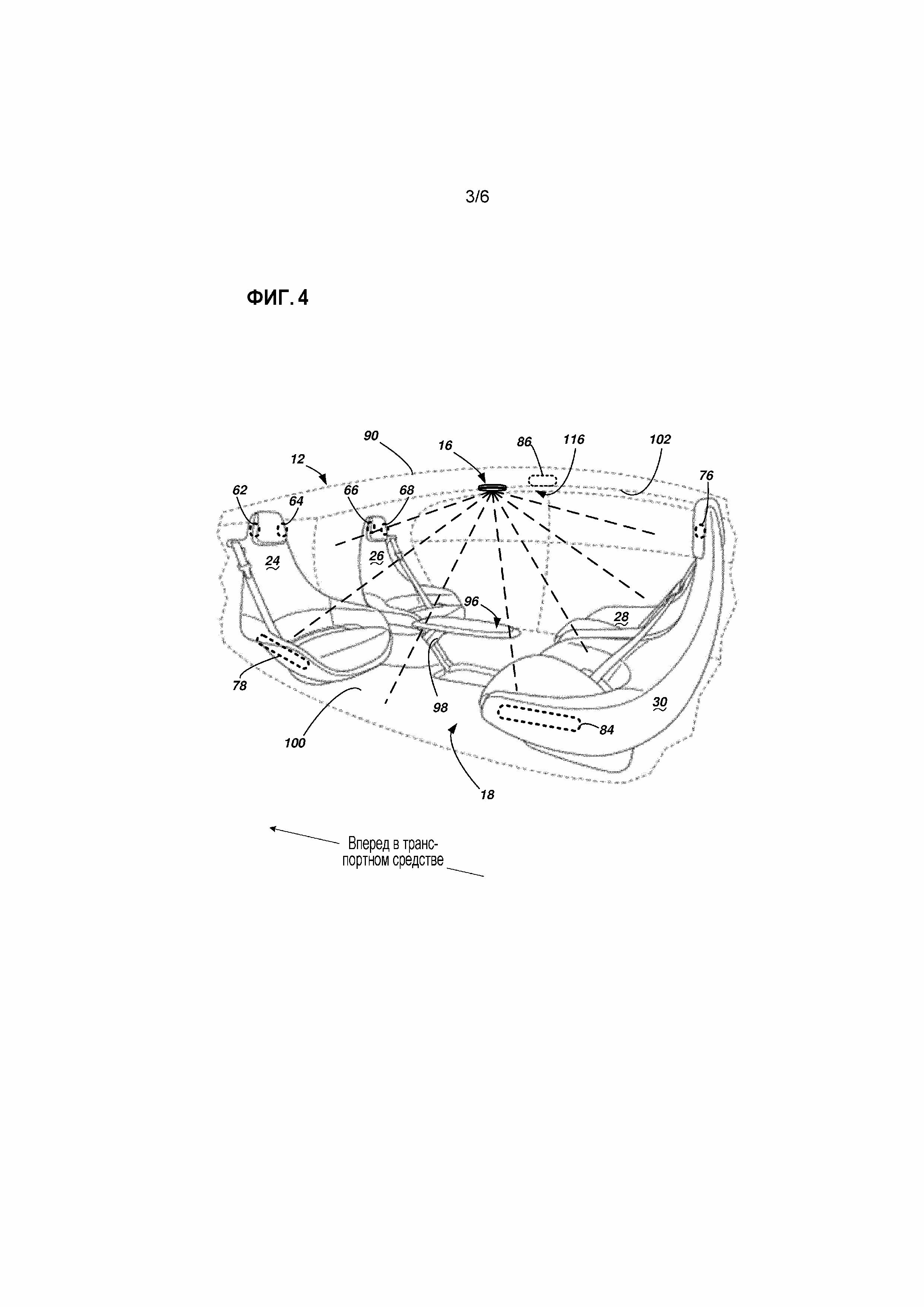
[0005] Фиг. 4 - это вид в перспективе салона транспортного средства, показанного на фиг. 1.
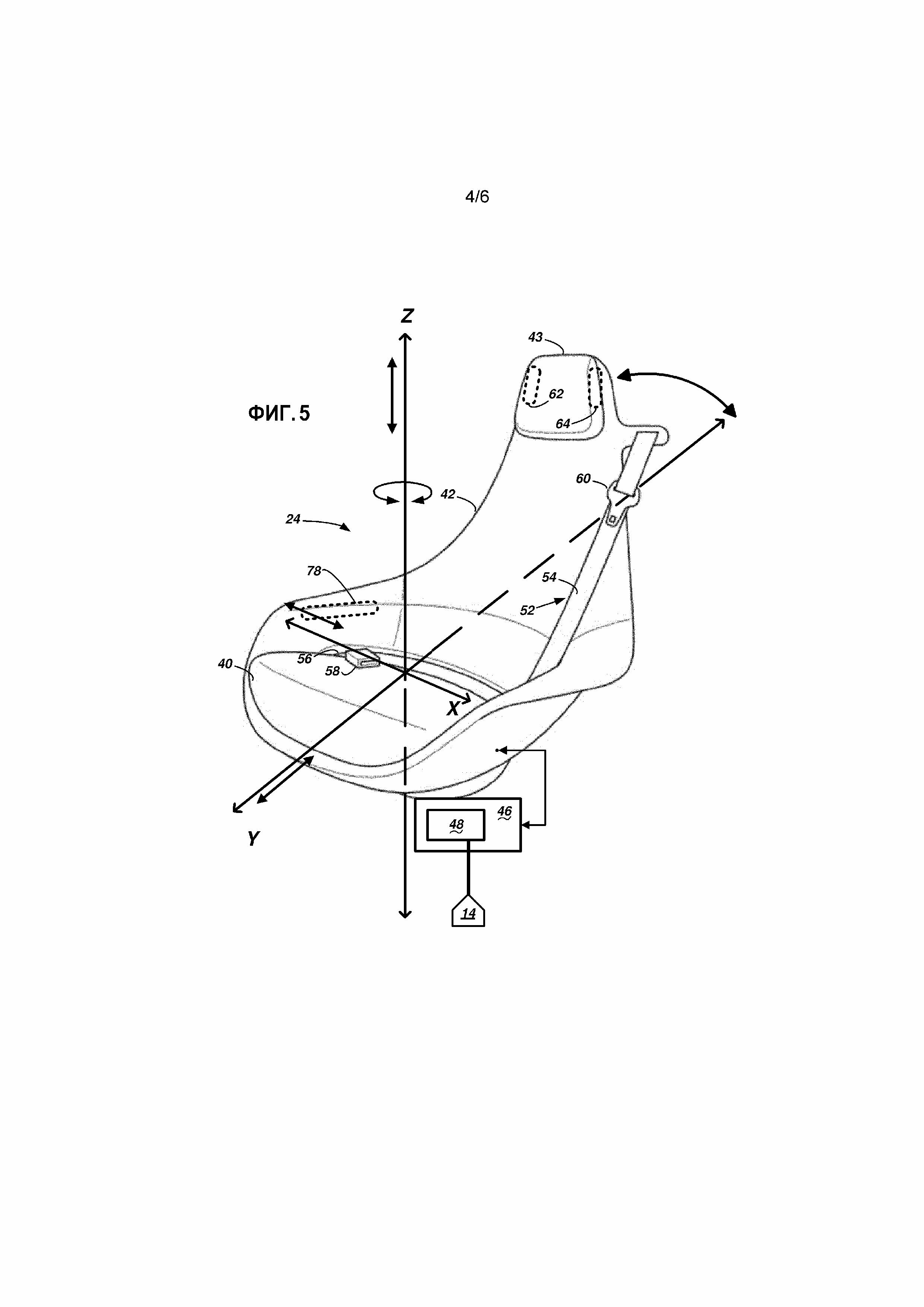
[0006] Фиг. 5 - это вид в перспективе одного из сидений транспортного средства.
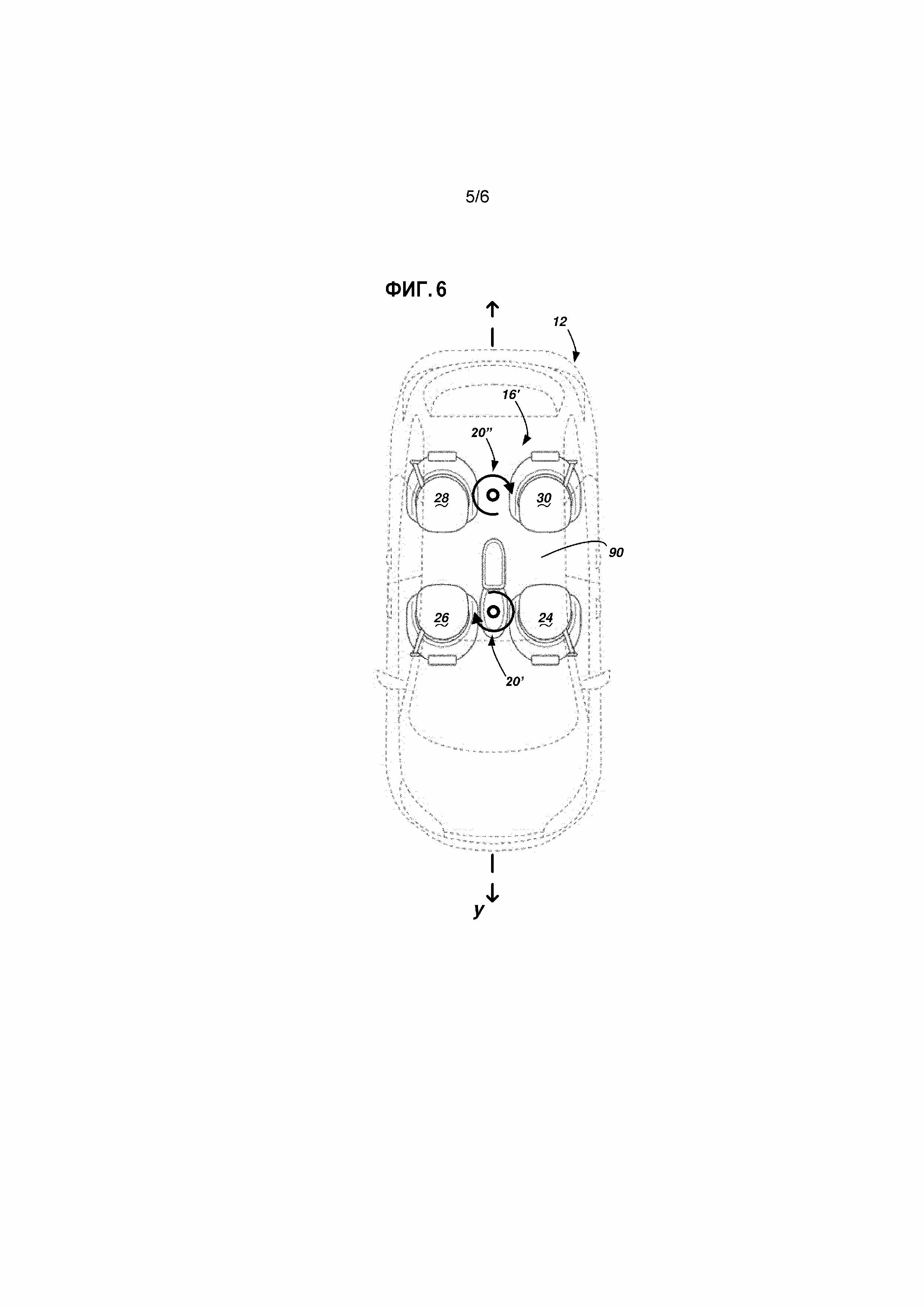
[0007] Фиг. 6 иллюстрирует дополнительный пример комплекта датчика транспортного средства, показанного на фиг. 1.
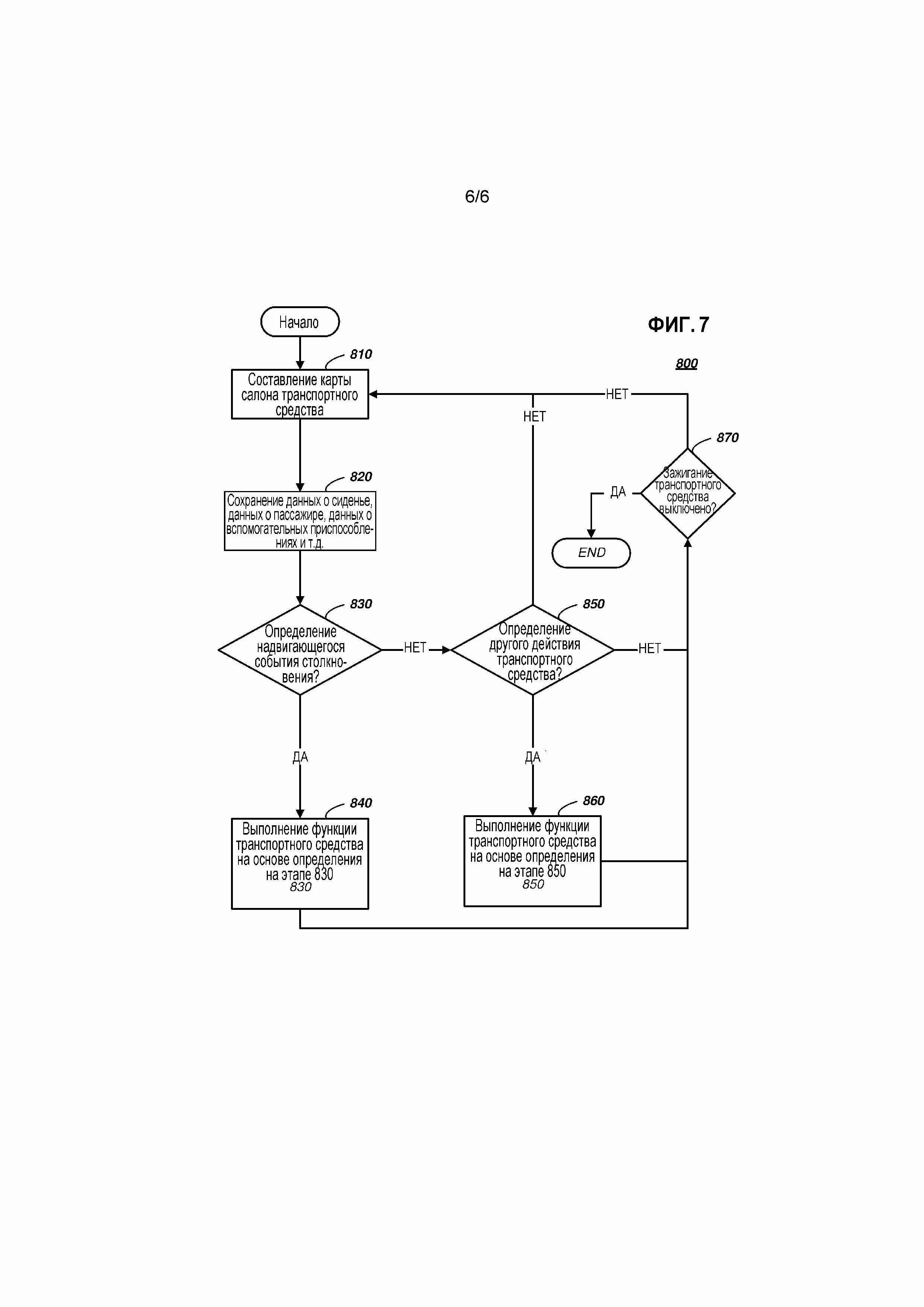
[0008] Фиг. 7 - это блок-схема последовательности операций процесса наблюдения за салоном транспортного средства и выполнения функции транспортного средства на основе наблюдения.
Подробное описание изобретения
[0009] Описывается система наблюдения за салоном для транспортного средства. Система включает в себя компьютер, который имеет память, которая хранит инструкции, исполняемые процессором, чтобы выполнять среди прочего, процесс наблюдения за салоном транспортного средства.
[0010] Согласно одному примеру компьютер программируется, чтобы: принимать данные изображения, которые включают в себя сиденье транспортного средства и пассажира в салоне транспортного средства; определять, с помощью принятых данных, ориентацию сиденья и ориентацию пассажира; и выполнять функцию транспортного средства на основе определения.
[0011] Согласно примеру данные могут быть приняты от датчика, установленного в салоне транспортного средства.
[0012] Согласно примеру данные могут быть приняты, по меньшей мере, от одного устройства лазерной системы обнаружения и измерения дальности.
[0013] Согласно примеру компьютер дополнительно может быть запрограммирован, чтобы, с помощью принятых данных, определять позицию сиденья транспортного средства и затем выполнять функцию, по меньшей мере, частично на основе позиции сиденья.
[0014] Согласно примеру функция может включать в себя запрет развертывания подушки безопасности из модуля системы пассивной безопасности транспортного средства. Дополнительно, запрет развертывания может быть основан на ориентации пассажира относительно сиденья.
[0015] Согласно примеру функция включает в себя перемещение, наклон, поворот сиденья или их сочетание.
[0016] Согласно примеру функция может включать в себя совмещение оси сиденья с первичным направлением силы (PDOF) прогнозируемого события столкновения.
[0017] Согласно примеру функция может включать в себя управление направленностью воздушного вентилятора или звукового динамика в салоне.
[0018] Согласно другому примеру компьютер программируется, чтобы: определять, с помощью данных датчика, ориентацию пассажира транспортного средства относительно сиденья транспортного средства; определять надвигающееся событие столкновения; и управлять перемещением сиденья на основе определений.
[0019] Согласно примеру данные изображения могут быть приняты, по меньшей мере, от одного устройства лазерной системы обнаружения и измерения дальности, расположенного в салоне транспортного средства.
[0020] Согласно примеру компьютер дополнительно может быть запрограммирован, чтобы, на основе определений, запрещать развертывание подушки безопасности из модуля системы пассивной безопасности транспортного средства в ответ на событие столкновения.
[0021] Согласно примеру движение включает в себя перемещение, наклон, поворот сиденья или их сочетание.
[0022] Согласно другому примеру способ включает в себя: прием данных изображения, которые включают в себя сиденье транспортного средства и пассажира в салоне транспортного средства; определение, с помощью принятых данных, ориентации сиденья и ориентации пассажира; и выполнение функции транспортного средства на основе определения.
[0023] Согласно примеру данные могут быть приняты от датчика, установленного в салоне транспортного средства, при этом данные принимаются, по меньшей мере, от одного устройства лазерной системы обнаружения и измерения дальности.
[0024] Согласно примеру способ дополнительно содержит: с помощью принятых данных, определение позиции сиденья транспортного средства и затем выполнение функции, по меньшей мере, частично на основе позиции сиденья.
[0025] Согласно примеру функция может включать в себя, в ответ на событие столкновения, запрет развертывания модуля системы пассивной безопасности транспортного средства, который включает в себя подушку безопасности. Дополнительно, запрет развертывания может быть основан на ориентации пассажира относительно сиденья.
[0026] Согласно примеру функция включает в себя перемещение, наклон, поворот сиденья или их сочетание.
[0027] Согласно примеру функция может включать в себя совмещение оси сиденья с первичным направлением силы (PDOF) прогнозируемого события столкновения.
[0028] Со ссылкой на чертежи, на которых аналогичные номера указывают аналогичные части повсюду на нескольких видах, показана система 10 наблюдения за салоном для транспортного средства 12. Система 10 включает в себя бортовой компьютер 14, который принимает данные датчика от комплекта 16 датчика, находящегося в интерьере или салоне 18 транспортного средства 12. Комплект 16 датчика содержит один или более датчиков 20 (например, устройств лазерной системы обнаружения и измерения дальности (ЛИДАР), которые составляют карту позиций и ориентаций одного или более сидений 24, 26, 28, 30 транспортного средства, каких-либо пассажиров (O1, O2, см. фиг. 3) и других объектов в салоне 18. Как будет описано более подробно ниже, составление карты салона может происходить многократно, так что компьютер 14 может выполнять одну или более функций транспортного средства на основе составления карты. Например, на основе данных датчика, компьютер 14 может предоставлять инструкцию изменять направленность аудиосистемы или изменять направленность обогрева (или охлаждения) салона. В другом примере, на основе данных датчика, компьютер 14 может предоставлять инструкцию изменять позицию и/или ориентацию одного из сидений 24-30. Как будет объяснено более подробно ниже, это может происходить в ответ на определение, что пассажир садится в или покидает транспортное средство 12, или это может происходить в ответ на прогнозирование события столкновения, затрагивающего транспортное средство 12. Эти и другие неограничивающие примеры функций транспортного средства будут обсуждены более подробно ниже.
[0029] Обращаясь к фиг. 1-2, транспортное средство показано как пассажирский легковой автомобиль; однако, транспортное средство 12 также может быть грузовиком, автомобилем повышенной проходимости (SUV), жилым автофургоном, автобусом, поездом, морским судном, летательным аппаратом или т.п., которое включает в себя систему 10 наблюдения за салоном. Транспортное средство 12 может эксплуатироваться в любом режиме из множества автономных режимов. По меньшей мере, в одном примере транспортное средство 12 может эксплуатироваться в полностью автономном режиме (например, уровень 5), который определен Обществом автомобильных инженеров (SAE) (которое определило эксплуатацию на уровнях 0-5). Например, в неограничивающем примере, показанном на фиг. 1, транспортное средство 12 не включает в себя рулевое колесо, поскольку один или более компьютеров управляют транспортным средством 12; это является просто примером (например, в других реализациях, транспортное средство 12 может управляться, по меньшей мере, частично, пользователем транспортного средства или пассажиром). Что касается определенных SAE уровней, на уровнях 0-2 водитель-человек наблюдает или управляет большинством задач вождения, часто без помощи от транспортного средства 12. Например, на уровне 0 ("без автоматизации"), водитель-человек отвечает за все операции транспортного средства. На уровне 1 ("помощь водителю"), транспортное средство 12 иногда помогает в рулевом управлении, ускорении или торможении, но водитель все еще отвечает за подавляющее большинство управления транспортным средством. На уровне 2 ("частичная автоматизация") транспортное средство 12 может управлять рулением, ускорением и торможением в некоторых обстоятельствах без взаимодействия с человеком. На уровнях 3-5 транспортное средство 12 принимает на себя большую часть связанных с вождением задач. На уровне 3 ("традиционная автоматизация") транспортное средство 12 может выполнять руление, ускорение и торможение в некоторых обстоятельствах, а также наблюдение за окружением для вождения. Тем не менее, уровень 3 может требовать от водителя иногда вмешиваться. На уровне 4 ("высокая автоматизация") транспортное средство 12 может выполнять те же задачи, что и на уровне 3, но не полагаясь на вмешательство водителя в некоторых режимах вождения. На уровне 5 ("полная автоматизация"), транспортное средство 12 может осуществлять все задачи без любого вмешательства водителя.
[0030] Транспортное средство 12 показано имеющим четыре сиденья 24-30 в салоне 18 (фиг. 1-4). Когда используется в данном документе, салон 18 включает в себя область, приспособленную, чтобы перевозить, по меньшей мере, пассажиров-людей, и включает в себя, по меньшей мере, одну систему пассивной безопасности пассажира транспортного средства (например, такую как ремень безопасности, развертываемую подушку безопасности и т.д.). В то время как показаны четыре сиденья 24-30, больше или меньше сидений может быть использовано в других примерах. В то время как не требуется, каждое сиденье 24-30 может быть идентичным в некоторых примерах; следовательно, только одно сиденье (24) будет описано подробно в целях иллюстрации.
[0031] Как лучше показано на фиг. 5, сиденье 24 включает в себя основание 40 сиденья, имеющее приспособленную наклоняться спинку 42 сиденья. Сиденье 24 иллюстрируется как одноместное сиденье, имеющее подголовник 43; однако, это является просто примером, и другие конфигурации сиденья также возможны. Основание 40 может быть соединено с кузовом 44 транспортного средства (показано на фиг. 1) через опору 46 (схематично иллюстрирована). В данном документе кузов 44 транспортного средства может поддерживать транспортное средство 12 и может иметь любую подходящую конструкцию, включающую в себя, но не только, различные конструкции с несущим кузовом или конструкции кузова на раме.
[0032] Опора 46 может включать в себя контроллер 48 (схематично иллюстрирован), который включает в себя один или более моторов и т.п., чтобы обеспечивать силовое перемещение сиденья 24 транспортного средства во множестве направлений и/или ориентаций. Неограничивающие примеры направлений и/или ориентаций, относительно кузова 44 транспортного средства включают в себя: перемещение основания 40 и спинки 42 в направлении носовой части транспортного средства (например, вдоль иллюстрированной оси Y, которая может быть параллельной продольной y-оси транспортного средства 12, как показано на фиг. 1), перемещение основания 40 и спинки 42 в направлении задней части транспортного средства (например, вдоль иллюстрированной оси X, которая может быть поперечной и/или перпендикулярной y-оси транспортного средства), перемещение основания 40 и спинки 42 в направлении правого борта транспортного средства (например, вдоль иллюстрированной оси X), перемещение основания 40 и спинки в верхнем направлении транспортного средства (например, вдоль иллюстрированной оси Z, которая может быть перпендикулярной осям X и Y), перемещение основания 40 и спинки 42 в нижнем направлении транспортного средства (например, вдоль иллюстрированной оси Z) и перемещение основания 40 и спинки 42 в направлении вращения (например, относительно иллюстрированной оси Z). Дополнительно, в каждой из этих позиций и/или ориентаций, спинка 42 сиденья может быть во множестве наклонных позиций (например, изменяющихся в диапазоне от перпендикулярной ориентации относительно основания 40 сиденья (например, вертикальной позиции) до параллельной относительно основания 40 (например, полностью наклоненной позиции)). Должно быть понятно, что ось Y может быть параллельна y-оси (и что ось X может быть поперечной ей), когда сиденье 24 находится в номинальной или первой позиции; и, например, когда сиденье 24 поворачивается пассажиром во вторую позицию, Y- и y-оси могут не быть параллельными, или когда пассажиры перемещают сиденье 24 во вторую позицию, сиденье 24 может быть сдвинуто в X- и/или Y-направлениях без поворота (вокруг Z-оси). Как будет описано более подробно ниже, по меньшей мере, в некоторых примерах, компьютер 14 инструктирует или иначе управляет контроллером 48, чтобы перемещать сиденье 24 из первой или второй позиции, когда прогнозируется событие столкновения, например, поворачивает и/или повторно позиционирует сиденье 24 в позицию удара, например, так, что соответствующая Y-ось сиденья является параллельной первичному направлению силы (PDOF) грозящего удара. Таким образом, вращательные усилия удара могут быть минимизированы на пассажире.
[0033] Контроллер 48 может связываться с компьютером 14, например, так, что компьютер 14 может управлять движениями (например, позицией и/или ориентацией) основания 40 сиденья, спинки 42 сиденья или их сочетанием относительно осей X, Y, Z. Конечно, вручную управляемые органы управления (не показаны) могут быть доступны на или рядом с сиденьем 24 также, например, предоставлять возможность пассажиру перемещать или переориентировать сиденье 24 по желанию.
[0034] Сиденье 24 дополнительно может включать в себя ограничитель 52 ремня безопасности, который включает в себя тканые ленты 54, 56 ремня безопасности, пряжку 58 ремня безопасности и скобу 60 ремня безопасности - пряжка 58 и скоба 60 приспособлены соединяться друг с другом, чтобы удерживать пассажира (например, O1, O2) транспортного средства посредством тканых лент 54, 56, как известно в области техники. Дополнительно, как описано более подробно ниже, ограничитель 52 может быть соединен с контроллером 48, например, предоставляя возможность компьютеру 14 и контроллеру 48 выполнять одну или более контрмер для события столкновения, таких как обнаружение того, находятся ли пряжка 58 и скоба 60 в соединенном состоянии, втягивание тканой ленты 54 и/или 56 ремня безопасности, чтобы натягивать тканую ленту вокруг сидящего пассажира перед и/или во врем события столкновения, или т.п.
[0035] Обращаясь к фиг. 1-3, относительно, по меньшей мере, некоторых из сидений 24-30 транспортное средство 12 дополнительно может включать в себя один или более модулей 62, 64, 66, 68, 70, 72, 74, 76, 78, 80, 82, 84, 86 пассивной безопасности транспортного средства. Каждый модуль 62-86 может включать в себя, среди других элементов, корпус (не показан), насос (не показан) и подушку безопасности (не показана), так что, во время события столкновения, датчик удара (не показан) может обнаруживать удар и передавать инициирующий сигнал, инструктирующий насосу надувать подушку безопасности, которая затем разворачивается наружу из корпуса, чтобы удерживать пассажира(ов) транспортного средства, как известно в области техники.
[0036] По меньшей мере, в иллюстрированном примере два из каждых модулей 62-76 могут быть расположены на противоположных сторонах соответствующих подголовников сидений 24-30 транспортного средства (например, сиденье 24 включает в себя модули 62-64, расположенные на противоположных сторонах подголовника 43); любой из модулей 62-76 может быть выборочно развернут с одной из двух сторон головы пассажира и/или верхней части торса. В иллюстрированном примере модули 78-84 располагаются в сиденья 24-30 транспортного средства, соответственно, а модуль 86 (например, разворачиваемая надувная шторка безопасности) располагается в крыше 90 транспортного средства. Модуль 86 надувной шторки безопасности может быть выполнен с возможностью охватывать всех пассажиров на сиденьях 24-30. Или в другом примере подушка безопасности модуля 86 может покрывать область боковых окон рядом с пассажирами, сидящими на сиденьях 24, 30, и/или область между пассажирами, сидящими на сиденья 24, 30. Кроме того, другие такие модули надувной шторки безопасности могут быть расположены где-либо еще в транспортном средстве и быть предназначены, чтобы разворачиваться около пассажиров в любой подходящей позиции и/или ориентации в том месте. Аналогично, эти модули 78-86 могут быть выборочно развернуты на основе местоположения торса пассажира и/или нижней части тела, а также на основе первичного направления силы (PDOF) удара. Эти и другие реализации модуля пассивной безопасности являются просто примерами, возможны другие примеры. Таким образом, продолжая с примером сиденья 24 транспортного средства, модули 62, 64, 78 подушек безопасности показаны расположенными относительно этого сиденья 24, и они могут быть выборочно разворачиваемыми, чтобы удерживать пассажира, находящегося в нем.
[0037] По меньшей мере, в одном примере сиденья 24-30 в салоне 18 могут быть размещены как конференц-центр. Например, сиденья 24-26 могут быть обращены, в целом, назад в транспортном средстве, а сиденья 28-30 могут быть обращены, в целом вперед в транспортном средстве (например, обращены к сиденьям 24-26). Дополнительно, салон 18 может иметь одно или более электронно-убираемых вспомогательных приспособлений 96, чтобы обеспечивать встречу типа конференции, таких как иллюстрированный столик, который лучше виден на фиг. 4. Например, столик может быть расположен по центру относительно прямоугольной компоновки сидений 24-30 транспортного средства и может быть сконфигурирован с электронно-подвижным рычагом 98, который может управляться компьютером 14. Например, посредством управления рычагом 98, столик может электрически приводиться в действие между сложенной позицией (например, плотно прилегающей или в полу 100 салона 18 транспортного средства) и развернутой позицией (например, протягивающейся вверх от пола 100). Как будет описано более подробно ниже, по меньшей мере, в некоторых примерах, компьютер 14 инструктирует или иначе управляет одним или более вспомогательными приспособлениями 96 (например, типа столика) из развернутой позиции в сложенную позицию для того, чтобы защищать пассажиров, когда прогнозируется событие столкновения. Таким образом, компьютер 14 может минимизировать вероятность отсоединения вспомогательных приспособлений 96, таких как столик, от транспортного средства 12 и становления летящими предметами в салоне 18 во время столкновения (или, например, удара непристегнутых пассажиров о столик во время столкновения).
[0038] Таким образом, столик является просто одним примером вспомогательного приспособления 96. Другие неограничивающие примеры включают в себя монитор или дисплей, которые могут быть аналогично электрически приведены из развернутой позиции в сложенную позицию (например, из поверхности 102 крыши 90 транспортного средства, из поверхности пола 100, из стоек 92, 94 крыши или т.п.).
[0039] Обращаясь к фиг. 1, сеть 106 связи транспортного средства также схематично иллюстрируется. Сеть 106 соединяет с возможностью обмена данными компьютер 14, комплект 16 датчика, контроллер 48 (описанный выше) и систему 108 предупреждения столкновений друг с другом через проводное или беспроводное сетевое соединение 110 или любую другую подходящую архитектуру связи. По меньшей мере, в одном примере соединение 110 включает в себя одно или более из шины локальной сети контроллеров (CAN), Ethernet, локальной соединительной сети (LIN), волоконно-оптического соединения или т.п. Существуют также другие примеры. Например, альтернативно или в сочетании, например, с CAN-шиной, соединение 110 может содержать одно или более отдельных проводных или беспроводных соединений.
[0040] Компьютер 14 может быть единственным компьютером (или множеством вычислительных устройств, например, совместно используемых с другими системами и/или подсистемами транспортного средства). По меньшей мере, в одном примере компьютер 14 может быть так называемым компьютером для управления пассивной безопасностью; однако, это является просто примером. Компьютер 14 может содержать процессор или схему 112 обработки, соединенную с памятью 114. Например, процессор 112 может быть любым типом устройства, приспособленного обрабатывать электронные инструкции, неограничивающие примеры включают в себя микропроцессор, микроконтроллер или контроллер, специализированную интегральную схему (ASIC) и т.д., к примеру. В целом, компьютер 14 может быть запрограммирован, чтобы выполнять сохраненные цифровым образом инструкции, которые могут быть сохранены в памяти 114, которые предоставляют возможность компьютеру 14, среди прочего: принимать данные датчика, ассоциированные с объектами в салоне 18 транспортного средства (сиденья 24-30, пассажиры O1, O2, вспомогательные приспособления 96 и т.д.); с помощью данных датчика определять позицию и/или ориентацию, по меньшей мере, одного из сидений 24-30 транспортного средства; определять позицию и/или ориентацию, по меньшей мере, одного пассажира O1, O2; определять позицию и/или ориентацию, по меньшей мере, одного вспомогательного приспособления 96; вычислять относительные расстояния между пассажирами, сиденьями и другими структурами транспортного средства и вспомогательными приспособлениями, и т.д.; и/или выполнять функцию транспортного средства на основе одного или более из этих определений. Все позиции могут быть абсолютными, из которых относительные позиции между пассажиром и сиденьем, сиденьем и структурой транспортного средства, пассажиром и вспомогательными приспособлениями, и т.д., могут быть вычислены.
[0041] Память 114 может включать в себя любой энергонезависимый компьютерно-используемый или читаемый носитель, который может включать в себя одно или более устройств либо изделий хранения данных. Примерные энергонезависимые компьютерно-используемые устройства хранения данных включают в себя RAM (оперативное запоминающее устройство), ROM (постоянное запоминающее устройство), EPROM (стираемое программируемое ROM), EEPROM (электрически стираемое программируемое ROM), а также любые другие энергозависимые или энергонезависимые носители традиционной компьютерной системы. Энергонезависимые носители включают в себя, например, оптические или магнитные диски и другое постоянное запоминающее устройство. Энергозависимые носители включают в себя, например, динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Обычные формы компьютерно-читаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфорационную карту, бумажную ленту, любой другой физический носитель с рисунками отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любую другую микросхему памяти или картридж, или любой другой носитель, с которого компьютер может выполнять считывание. Как пояснено выше, память 114 может сохранять один или более компьютерных программных продуктов, которые могут быть осуществлены в качестве программного обеспечения, микропрограммного обеспечения и т.п.
[0042] Комплект 16 датчика может содержать один или более датчиков 20, расположенных в салоне 18 транспортного средства 12, чтобы сканировать, изображать и/или собирать данные, касающиеся объектов в нем. Эти данные затем могут быть использованы комплектом 16 датчика (и/или компьютером 14), чтобы составлять карту интерьера салона 18, например, включая в себя нанесение на карту объектов (например, таких как сиденья 24-30, вспомогательные приспособления 96 и пассажиры O1, O2). Датчики 20 могут быть расположены в любом подходящем месте в салоне 18; однако, по меньшей мере, в одном примере, датчик(и) 20 находятся в крыше 90, например, ориентированы вниз от поверхности 102 (например, как показано на фиг. 4), и приспособлены выполнять сканирование на 360 градусов интерьера 18 салона. Неограничивающие примеры датчика(ов) 20 могут включать в себя одно или более устройств лазерной системы обнаружения и измерения дальности (ЛИДАР), устройств обнаружения и измерения дальности с помощью радиоволн (РАДАР), сонарных устройств, дневных камер (например, устройств на комплементарных металло-оксидных полупроводниках (CMOS), устройств с зарядовой связью (CCD), усилителей изображения (так называемые i-квадратичные устройства) и т.д. Отдельно или совместно, данные от датчиков 20 могут быть использованы компьютером 14, чтобы создавать визуальную карту вместе с информацией о дальности для каждого обнаружения. По меньшей мере, в одном примере датчик(и) 20 включают в себя лидарные устройства, которые предоставляют данные датчика компьютеру 14 (например, которые включают в себя информацию, принадлежащую форме и размеру обнаруженных объектов, также как пространственным соотношениям между ними). Таким образом, по меньшей мере, в некоторых примерах, комплект 16 датчика и/или компьютер 14 может воссоздавать трехмерную (3D) модель, по меньшей мере, фрагмента салона 18 и объектов, расположенных в нем, и компьютер 14 может использовать эту модель, чтобы определять, исполнять ли функции транспортного средства, как описано более подробно ниже.
[0043] Датчик(и) 20, которые используют лидар, могут применять метод активного сканирования, который включает в себя испускание светового сигнала (от эмиттера, не показан) измерение так называемого 'отраженного сигнала' (в чувствительном элементе, не показан), отраженный сигнал включает в себя отражение испускаемого сигнала. Каждый датчик 20 может иметь множество пар эмиттер/чувствительный элемент. Совместно, эти пары могут быть сконфигурированы, чтобы сканировать свои окружающие обстановки между 0° и 360°. Поскольку технологии на основе лидаров и лидарные устройства являются общеизвестными в данной области техники, их реализация подробно не поясняется в данном документе.
[0044] Фиг. 1 иллюстрирует пример транспортного средства 12, использующего единственный датчик 20 (например, имеющий лидарную технологию), чтобы сканировать и собирать данные в салоне 18. В этом примере датчик 20 располагается на и/или, по меньшей мере, частично в крыше 90 транспортного средства 12, например, в центральной ее области 116, относительно сидений 24-30. Таким образом, посредством сканирования на 360°, один датчик 20 может предоставлять данные изображения, которые могут быть использованы, чтобы наносить на карту размер, форму, позицию и/или ориентацию сидений 24-30 транспортного средства, пассажиров O1, O2 и вспомогательных приспособлений 96. Датчик 20 может включать в себя один световой луч или множество световых лучей в вертикальной компоновке (относительно вертикальной оси), поворачивающихся вокруг интерьера 18 салона.
[0045] Также возможны другие компоновки датчика, включающие в себя компоновки, имеющие более одного датчика 20. Например, фиг. 6 иллюстрирует комплект 16' датчика, имеющий компоновку из двух датчиков (20', 20''). Датчики 20', 20'' могут быть размещены вдоль y-оси транспортного средства (например, поддерживаться крышей 90) или согласно какой-либо другой подходящей компоновке (например, в противоположных углах салона 18, на противоположных стойках транспортного средства и т.д.). Существуют также другие примеры.
[0046] Возвращаясь снова к фиг. 1, система 108 предупреждения столкновений предназначается, чтобы включать в себя один или более датчиков транспортного средства и, по меньшей мере, один компьютер, сконфигурированный, чтобы принимать данные от этих датчика(ов) и определять или прогнозировать событие столкновения. Датчик(и) могут включать в себя устройства формирования изображения и/или сканирования, имеющие поле обзора, которое захватывает какую-либо подходящую область, расположенную снаружи транспортного средства 12 (например, проезжую часть дороги, разметки полос движения, вывески, другие транспортные средства, пешеходов и т.д.). А компьютер(ы), ассоциированные с системой 108, могут включать в себя компьютер 14, одно или более специализированных вычислительных устройств, систему взаимосвязанных вычислительных устройств, запрограммированных исполнять программное обеспечение, чтобы помогать транспортному средству 12, или т.п. Таким образом, например, когда транспортное средство 12 эксплуатируется в любом автономном режиме, включающем в себя полностью автономный режим, система 108 предупреждения столкновений может помогать избегать события столкновения или минимизировать повреждение, удар, степень тяжести и т.д., которые происходят в результате события столкновения. Таким образом, по меньшей мере, в некоторых случаях, система 108 также может предоставлять инструкции другим системам и/или подсистемам транспортного средства, например, такие как инструкции программного обеспечения рулевой системе транспортного средства, инструкции программного обеспечения тормозной системе транспортного средства, инструкции программного обеспечения системе силовой цепи транспортного средства, инструкции программного обеспечения системе устройств пассивной безопасности транспортного средства (например, натягивающие ограничительные устройства ремней безопасности, разворачивающие подушки безопасности из модулей пассивной безопасности и т.д.) или т.п. Работа системы 108 предупреждения столкновений, например, действие согласованно с исполнением инструкций, сохраненных в компьютере 14, также может включать в себя: запрет развертывания подушки безопасности из одного из модулей 62-86, перемещение и/или ориентацию сиденья 24-30 транспортного средства по направлению к позиции удара, складывание одного или более вспомогательных приспособлений 96 транспортного средства или т.п., как будет обсуждаться более подробно ниже.
[0047] Транспортное средство 12 может содержать также множество других вычислительных систем транспортного средства. Например, транспортное средство 12 может иметь систему 120 управления климатом для обогрева и/или охлаждения салона 18 транспортного средства 12. Например, система может включать в себя любое подходящее число вычислительных устройств (не показаны) и множество направленных вентиляторов 122 для нагнетания воздуха (только один показан в иллюстративных целях), которые могут быть электронно-управляемыми, чтобы изменять объем нагнетаемого воздуха, также как их направленность, например, в ответ на инструкцию, предоставленную компьютером 14, как будет описано более подробно ниже.
[0048] Транспортное средство 12 также может содержать информационно-развлекательную систему 124, которая включает в себя подходящее вычислительное устройство (не показано), человеко-машинный интерфейс (HMI), соединенный с вычислительным устройством, таким как так называемое головное устройство транспортного средства (не показано), и множество звуковых динамиков 126, соединенных с ним (только один показан в иллюстративных целях). Звуковая направленность динамиков 126 может управляться посредством системы 124, чтобы предоставлять впечатление окружающего звука для пассажиров O1, O2 салона 18 транспортного средства, например, в ответ на инструкцию, предоставленную компьютером 14, как будет описано более подробно ниже.
[0049] Обращаясь теперь к фиг. 7, показан процесс 800 наблюдения за салоном 18 транспортного средства и выполнения функции транспортного средства на основе наблюдения. Процесс начинается с этапа 810, на котором комплект 16 датчика составляет карту салона 18 транспортного средства. Составление карты салона может включать в себя получение данных датчика (например, данных изображения), по меньшей мере, от одного датчика 20 (например, по меньшей мере, лидарного устройства) и затем формирование одного или более трехмерных (3D) изображений или моделей с помощью этих данных изображения. Только в целях иллюстрации, остальная часть процесса 800 будет описана относительно компьютера 14, определяющего 3D-модель салона 18 из данных изображения.
[0050] Например, как показано на фиг. 1, датчик 20 может выполнять сканирование на 360° из своей центральной области 116, захватывая данные изображения и предоставляя их компьютеру 14 через сетевое соединение 110, так что компьютер 14 может формировать 3D-модель. В других лидарных компоновках датчики могут выполнять сканирование менее чем на 360° для того, чтобы получать данные изображения салона 18. Например, для сидячих позиций, таких как позиции, показанные на фиг. 6, датчик 20' может выполнять сканирование области салона, которая включает в себя сиденья 26, 28, в то время как датчик 20'' может сканировать область салона, которая включает в себя сиденья 24, 30. Конечно, это является просто неограничивающим примером; другие примеры также возможны.
[0051] Как будет понятно специалистам в области техники, вращение во время сканирования соответствующих датчика(ов) может включать в себя электронное вращение или электро-механическое вращение или т.п., например, в примере, показанном на фиг. 1, датчик 20 может получать набор данных изображения салона 18 с каждым полным поворотом (360°) (например, при этом скорость вращения может изменяться на основе поля обзора и видимого поля). Дополнительно, такое сканирование может быть непрерывным, периодическим или прерывистым. По меньшей мере, в одном примере этап 810 происходит многократно на всем протяжении процесса 800, так что салон 18 сканируется многократно с любой подходящей частотой; таким образом, этап 810 может происходить во время других этапов, обсужденных ниже. Таким образом, компьютер 14 может определять выполнение некоторых функций транспортного средства на основе обновленной информации о салоне, как обсуждается более подробно ниже.
[0052] Компьютер 14 может хранить в памяти 114 и исполнять, с помощью процессора 112, алгоритм воссоздания, так что компьютер 14 может составлять карту салона 18 и его содержимого с помощью данных изображения, принятых от датчика(ов) 20. Алгоритмы создания карты, технологии для их применения и т.п. являются известными и, следовательно, не будут обсуждаться дополнительно здесь. Будет понятно что с помощью таких алгоритма(ов) составления карты, компьютер 14 может формировать модель позиции и ориентации пассажиров O1, O2, позиции и ориентации сидений 24-30 транспортного средства, того, находятся ли вспомогательные приспособления 96 в сложенной или развернутой позиции, и т.п.
[0053] Для иллюстрации, компьютер 14 может конструировать 3D-модель с помощью данных изображения, которые предоставляют информацию, касающуюся позиции и ориентации сиденья, позиции и ориентации пассажира, позиции и/или ориентации вспомогательного приспособления, например, позиций, расстояний и ориентаций, все относительно друг друга и/или другой структуры транспортного средства (например, включающей в себя поверхности дверей транспортного средства, поверхности потолка транспортного средства, поверхности пола, поверхности консоли и т.д.).
[0054] Таким образом, фиг. 3 иллюстрирует один неограничивающий пример сидений 24-30 транспортного средства и двух пассажиров O1, O2. Здесь, например, компьютер 14 может конструировать 3D-модель, которая указывает, что каждое из сидений 24-30 транспортного средства находится в номинальной позиции, что пассажир O1 сидит в сиденье 26 транспортного средства, что пассажир O2 сидит в сиденье 30 транспортного средства, и что вспомогательное приспособление 96 (столик) находится в развернутой позиции. В других примерах одно или более сидений 24-30 могут, по меньшей мере, частично поворачиваться. Поскольку каждое сиденье 24-30 может быть в номинальной позиции, только одно (сиденье 26) будет объяснено подробно в иллюстративных целях. Например, на фиг. 3, сиденье 26 не показано перемещенным по какой-либо из X-, Y- или Z-осей из своей центральной, номинальной позиции (таким образом, с помощью 3D-модели, сформированной посредством компьютера 14, позиция сиденья является определяемой (например, посредством сравнения сформированной 3D-модели с эталонными изображением(ями) или эталонной моделью, сохраненной в памяти 114 для сиденья 26 в номинальной позиции)). Кроме того, сиденье 26 не поворачивается из своей номинальной (обращенной назад позиции) вокруг Z-оси (таким образом, с помощью 3D-модели, ориентация сиденья является определяемой с помощью аналогичных эталонных изображения(ий) или моделей). Ориентация сиденья также может включать в себя то, наклонена ли спинка 42 сидения на какой-либо угол от номинальной полностью вертикальной позиции относительно основания 40 сиденья. На фиг. 3 соответствующая спинка 42 сиденья находится в полностью вертикальной (номинальной) позиции. Таким образом, когда используется в данном документе, позиция сиденья относится к тому, перемещается ли соответствующее сиденье в каком-либо из X-, Y- или Z-направлений (например, из номинальной позиции) и, когда используется в данном документе, ориентация сиденья относится к тому, поворачивается ли соответствующее сиденье вокруг Z-оси (например, от номинального направления обращения), а также относится к углу спинки сиденья относительно соответствующего основания сиденья.
[0055] Что касается пассажиров O1, O2, 3D-модель может указывать позицию этих пассажиров, а также их ориентацию. Когда используется в данном документе, позиция пассажира относится к тому, находится ли пассажир в одном из сидений 24-30 транспортного средства (или нет). Таким образом, на фиг. 3, позиция пассажира O1 находится в сиденье 26 транспортного средства, а позиция пассажира O2 находится в сиденье 30 транспортного средства. Когда используется в данном документе, ориентация пассажира относится к образу, которым пассажир позиционируется относительно сиденья транспортного средства. Для иллюстрации, пассажир O2 ориентируется в номинальной позиции. Более конкретно, когда сиденье 30 транспортного средства (в номинальной позиции) обращено вперед в транспортном средстве, так делает пассажир O2. Например, плечи пассажира согласуются со спинкой 42 сиденья, а центральная плоскость C2 тела пассажира включает в себя Y-ось соответствующего сиденья 30. Дополнительно, так сиденье 30 находится в полностью вертикальной позиции, таким образом, это пассажир O2. Когда используется в данном документе, центральная плоскость является сагиттальной плоскостью, проходящей, по меньшей мере, через голову и торс пассажира. Дополнительно, центральная плоскость пассажира может считаться выровненной (или считаться включающей в себя Y-ось соответствующего сиденья), предусматривая, что она находится в пределах предварительно определенного порогового значения для нее. Дополнительно, компьютер 14 может быть запрограммирован, чтобы определять, находится ли пассажир в номинальной ориентации, или до какой степени пассажир не находится в номинальной ориентации.
[0056] Рассмотрим также пассажира O1, который не находится в номинальной ориентации. Например, пассажир O1 не имеет оба плеча непосредственно вплотную к соответствующей спинке 42 сиденья; дополнительно, центральная плоскость C1 тела пассажира не является параллельной Y-оси соответствующего сиденья 26 транспортного средства (например, плоскость C1 и соответствующая Y-ось сиденья 26 имеют угловую разницу больше порогового значения).
[0057] Поскольку пассажир может двигаться или позиционировать его/ее тело практически в бесчисленных позициях, существует множество других примеров ориентации. Например, ориентация пассажира может включать в себя то, протягивается ли какая-либо часть тела пассажира за пределы салона 18 (например, свешивание кистей, рук, ног и т.д. из окна транспортного средства), то, находится ли пассажир прямо в сиденье транспортного средства, которое частично или полностью наклонено (например, плечи пассажира не прилегают к спинке сиденья), то, сложены ли или согнуты ноги пассажира вертикально или вбок, в то время как соответствующее сиденье находится в наклонной позиции (например, включающей в себя полностью наклонную позицию), только чтобы перечислить несколько неограничивающих примеров.
[0058] Относительно вспомогательных приспособлений 96, 3D-модель, определенная посредством компьютера 14, может указывать, находится ли столик или другое вспомогательное приспособление (например, монитор и т.д.) в сложенной позиции или, по меньшей мере, частично в развернутой позиции (например, любой позиции, которая не является сложенной позицией).
[0059] По меньшей мере, в одном примере, на этапе 820 процесса 800 (который может следовать за этапом 810), компьютер 14 сохраняет один или более типов данных, например, включающих в себя, но не только, данные о сиденье, данные о пассажире и/или данные о вспомогательном приспособлении. Когда используются в данном документе, данные о сиденье включают в себя какие-либо данные, касающиеся позиции и ориентации, по меньшей мере, одного из сидений 24-30 транспортного средства. В некоторых примерах данные о сиденье могут относиться ко всем сиденьям 24-30 транспортного средства; в других примерах данные о сиденье относятся только к тем сиденьям, которые заняты одним из пассажиров транспортного средства (например, O1, O2). Когда используются в данном документе, данные о пассажире включают в себя любые данные, относящиеся к позиции и/или ориентации пассажиров (например, O1, O2). И, когда используются в данном документе, данные о вспомогательном приспособлении включают в себя любые данные, касающиеся вспомогательных приспособлений или вспомогательных приспособлений, которые находятся в развернутой позиции (или, по меньшей мере, частично в развернутой позиции). Компьютер 14 может хранить один или более этих типов данных в памяти 114 в течение любой подходящей продолжительности. В одном примере компьютер 14 удаляет или перезаписывает типы данных следом за каждым последующим составлением карты салона 18 транспортного средства (например, этап 810). В другом примере компьютер 14 удаляет или перезаписывает типы данных после порогового периода времени (например, после 3-5 минут), например, хранит несколько минут данных самого последнего отсканированного изображения в случае, когда событие столкновения имеет место. Если событие столкновения происходит, компьютер 14 хранит типы данных до тех пор, пока авторизованный специалист по обслуживанию не выполнит загрузку из памяти 114. Таким образом, информация о событии столкновения может быть сохранена в целях расследования происшествия или инженерной деятельности для непрерывного усовершенствования.
[0060] На этапе 830, который следует, компьютер 14 определяет, прогнозируется ли надвигающееся событие столкновения или вот-вот должно произойти. Когда используется в данном документе, надвигающееся означает, что вот-вот должно произойти или имеет вероятность того, что событие произойдет, при этом вероятность является статистической вероятностью (вычисляемой посредством компьютера 14), которая больше порогового значения. В одном примере пороговое значение может составлять 80%; в другом примере пороговое значение равно 90%; в еще одном примере пороговое значение равно 95%.
[0061] По меньшей мере, в одном примере процессор 112 компьютера 14 определяет, предоставила ли система 108 предупреждения столкновений ему какое-либо указание или прогноз столкновения или потенциального столкновения. Система 108 предупреждения столкновений, как описано выше, может распознавать или определять событие столкновения множеством способов, включающих в себя, но не только, использование данных регулирования тягового усилия, лидарных данных о дороге впереди или любых других данных распознавания приближения, данных камеры о дороге впереди, обмена данными между транспортными средствами (V2V) о столкновении впереди, данных о торможении (например, от окружающих транспортных средств) и т.д., называя некоторые из них. Таким образом, система 108 может предоставлять инструкцию в любой подходящей форме компьютеру 14 через сетевое соединение 110, когда вычислительные устройства системы 108 определяют надвигающееся событие столкновения. На этапе 830 система 108 может выполнять любые подходящие способ(ы) обнаружения столкновения, известные специалистам в области техники, и предоставлять любое подходящее указание или инструкцию компьютеру 14.
[0062] По меньшей мере, в одном примере, когда система 108 предупреждения столкновений предоставляет компьютеру 14 указание о надвигающемся событии столкновения, она также предоставляет данные о столкновении. По меньшей мере, в одном неограничивающем примере данные о столкновении могут включать в себя прогнозируемое направление удара (например, первичное направление силы (PDOF)), прогнозируемую величину удара, или и то, и другое.
[0063] Если, на этапе 830 компьютер 14 определяет надвигающееся событие столкновения, процесс 800 переходит к этапу 840; однако, если компьютер 14 не определяет надвигающееся событие столкновения, процесс может переходить к этапу 850.
[0064] На этапе 840 компьютер 14 может выполнять одну или более функций транспортного средства в ответ на определение этапа 830. Например, компьютер 14 может принимать некоторые контрмеры столкновения, чтобы защищать транспортное средство 12, пассажиров O1, O2 транспортного средства и т.д. В одном примере компьютер 14 использует 3D-модель (сформированную на этапе 810) и/или сохраненные данные о сиденье, данные о пассажире и/или данные о вспомогательном приспособлении (этап 820), чтобы выполнять функцию транспортного средства на этапе 840. Далее следует множество неограничивающих иллюстраций.
[0065] В одном примере компьютер 14 определяет необходимость развертывать некоторые из модулей 62-86 системы пассивной безопасности транспортного средства, но не другие. Например, в соответствии с размещением пассажиров, показанным на фиг. 3 (при этом PDOF A, предоставленный системой 108 предупреждения столкновения, указывает лобовое столкновение), компьютер 14 может инструктировать модулям 66, 74, 76, 80, 84 системы пассивной безопасности развертываться и запрещать модулю 68 системы пассивной безопасности развертываться. Подушка безопасности модуля 66, когда развертывается управляемым образом, может помогать уменьшать хлыстовые травмы шеи пассажира O1, и может не быть необходимости развертывать подушку безопасности модуля 68, поскольку может не быть вероятности соприкосновения между пассажиром O1 и подушкой безопасности модуля 68.
[0066] Существуют другие аналогичные примеры. Например, компьютер 14 может запрещать развертывание одного или более модулей системы пассивной безопасности, когда люди не сидят в соответствующих сиденьях 24-30 транспортного средства. Или компьютер 14 может запрещать развертывание любого модуля системы пассивной безопасности на основе оценки компьютером 14, что само развертывание вероятно должно вызывать травму пассажира.
[0067] В другом примере компьютер 14 может перемещать одно или более сидений 24-30 транспортного средства на основе определения надвигающегося столкновения (например, на основе инструкции от системы 108 предупреждения столкновений). И снова, компьютер 14 может управлять перемещением сиденья транспортного средства с помощью контроллера 48, тем самым, инструктируя соответствующему сиденью перемещаться вдоль X-, Y- или даже Z-осей и/или поворачиваться вокруг Z-оси. Как показано на фиг. 3, если надвигающееся столкновение приходит из PDOF B, тогда, например, компьютер 14 может поворачивать и/или перемещать сиденье 30 транспортного средств по часовой стрелке, с тем, чтобы выравнивать сиденье 30 и пассажира O2 с PDOF B, так что вращательные усилия во время столкновения минимизируются на теле пассажира. Таким образом, в одном примере, компьютер 14 может выравнивать центральную плоскость C2 с PDOF B (или делать их параллельными).
[0068] Компьютер 14 также может поворачивать и/или перемещать сиденье 26 так, что пассажир O1 хорошо подходит для удара, имеющего PDOF B. Кроме того, в этом примере, поворот сиденья 26 транспортного средства может вызывать столкновение между вспомогательным приспособлением 96 и пассажиром O1 (например, его/ее ногами). Таким образом, перед этим перемещением сиденья 26, компьютер 14 может инструктировать вспомогательному приспособлению 96 перемещаться по направлению к (или в) сложенной позиции, перемещая столик в пол 100, например, управляя им электронным образом. Таким образом, компьютер 14 может предпринимать контрмеры, которые размещают обоих пассажиров O1 и O2 в лучшей позиции и/или ориентации во время события столкновения.
[0069] Следом за этапом 840 процесс 800 может переходить к этапу 870, чтобы определять, является ли состояние зажигания транспортного средства выключенным. Если состояние является выключенным, процесс 800 заканчивается. Если состояние зажигания транспортного средства является включенным, тогда процесс 800 возвращается к началу цикла и повторяет, по меньшей мере, часть процесса, начиная снова с этапа 810.
[0070] Возвращаясь к этапу 850, который следует за этапом 830, когда надвигающееся событие столкновения не определяется, компьютер 14 может определять, выполнять ли другую функцию транспортного средства, например, неаварийную функцию транспортного средства. Например, если пассажиры O1, O2 используют информационно-развлекательную систему транспортного средства, компьютер 14 может определять, что регулировка звука транспортного средства является желательной. Или, например, если пассажиры O1, O2 используют систему управления климатом транспортного средства, компьютер 14 может определять, что регулировка температуры и/или потока воздуха является необходимой. Если такое определение выполняется, процесс 800 переходит к этапу 860; иначе, процесс может переходить к этапу 870, который был описан выше (или альтернативно циклически возвращаться к этапу 830).
[0071] На этапе 860 компьютер 14 может выполнять соответствующую функцию транспортного средства на основе составления карты салона 18 транспортного средства (этап 810), на основе сохраненных данных о сиденье, пассажире или вспомогательном приспособлении (этап 820) и/или на основе определения на этапе 850. Таким образом, в одном примере, компьютер 14 может управлять направленностью одного или более воздушных вентиляторов 122, чтобы направлять воздух на сиденья 26 и 30 транспортного средства, занятые пассажирами O1, O2. Или компьютер 14 может управлять направленностью одного или более звуковых динамиков 126, чтобы регулировать окружающий звук на основе позиции и ориентации пассажиров O1, O2. Это просто является примерами неаварийных функций транспортного средства, которые компьютер 14 может выполнять на этапе 860; существуют и другие. Следом за этапом 860 процесс 800 переходит к этапу 870, описанному выше. Альтернативно, компьютер 14 может возвращаться к началу цикла и повторять этап 830, повторно определяя, надвигается ли событие столкновения.
[0072] Также существуют другие примеры процесса 800. Например, по меньшей мере, в одном примере, компьютер 14 дополнительно определяет, находятся ли пряжка 58 сиденья и скоба 60 в соединенном состоянии (например, с помощью данных изображения и/или электронных данных от контроллера 48). И, по меньшей мере, в одном примере, компьютер 14 выполняет функцию транспортного средства на этапе 840, только когда пряжка 58 и скоба 60 находятся в соединенном состоянии. Например, ожидается, что быстрый поворот сиденья транспортного средства при подготовке для удара (например, через PDOF A, PDOF B и т.д.) может смещать пассажира, пряжка сиденья которого находится в отсоединенном состоянии от сиденья транспортного средства, и потенциально причинять больший вред; таким образом, по меньшей мере, в некоторых случаях, компьютер 14 основывает определение, чтобы выполнять функцию транспортного средства, по меньшей мере, частично на соединенном или отсоединенном состоянии пряжки 58 сиденья и скобы 60.
[0073] Должно быть принято во внимание, что компьютер 14 может управлять также другими компонентами транспортного средства. Например, в ответ на определение одного или более из позиции пассажира транспортного средства, ориентации пассажира транспортного средства, позиции сиденья транспортного средства, ориентации сиденья транспортного средства, отклонения (или наклона), или т.п., компьютер 14 может выполнять одну или более следующих функций транспортного средства, таких как регулировка ремней безопасности транспортного средства, приведение в действие ограничителей нагрузки, ассоциированных с узлом ремня безопасности, развертывание других подушек безопасности транспортного средства, непоказанных или описанных выше, перемещение или приведение в действие других вспомогательных приспособлений или структур транспортного средства, явно непоказанных и описанных выше.
[0074] Дополнительно, модули системы пассивной безопасности транспортного средства, описанные в данном документе, могут содержать пригодные или непригодные для повторного использования подушки безопасности. Например, непригодные для повторного использования подушки безопасности имеют два состояния: развернутое и неразвернутое. Однако, пригодные для повторного использования подушки безопасности дополнительно включают в себя промежуточное состояние, которое может быть поменяно на противоположное - компьютер 14 может приводить такие модули в промежуточное состояние на основе данных датчика транспортного средства, например, на основе ускорения транспортного средства по различным осям, на основе данных о торможении, и т.д. Таким образом, по меньшей мере, в одном примере, выполнение функции транспортного средства также может включать в себя приведение подушки безопасности в это промежуточное состояние и/или возврат подушки безопасности в ее предыдущее неразвернутое состояние. Пригодные и непригодные для повторного использования подушки безопасности являются известными в области техники и, таким образом, не будут обсуждаться дополнительно здесь.
[0075] Таким образом, была описана система наблюдения за салоном для транспортного средства. Система включает в себя компьютер, который программируется, чтобы принимать данные изображения от комплекта датчика, который сканирует салон транспортного средства и затем формирует данные изображения или модель(и) из них. На основе обстоятельств, затрагивающих пассажира(ов) в салоне, компьютер дополнительно программируется, чтобы выполнять, по меньшей мере, одну функцию транспортного средства.
[0076] В целом, описанные вычислительные системы и/или устройства могут применять любую из множества компьютерных операционных систем, включающих в себя, но не считающихся ограниченными, версии и/или разновидности операционной системы Ford Sync®, микропрограммного обеспечения AppLink/Smart Device Link, операционной системы Microsoft Automotive®, операционной системы Microsoft Windows®, операционной системы Unix (например, операционной системы Solaris®, распространяемой корпорацией Oracle Corporation из Редвуд Шорс, Калифорния), операционной системы AIX UNIX, распространяемой компанией International Business Machines из Армонка, Нью-Йорк, операционной системы Linux, операционных систем Mac OS X и iOS, распространяемых компанией Apple Inc. из Купертино, Калифорния, BlackBerry OS, распространяемой компанией Blackberry Ltd из Ватерлоо, Канада, и операционной системы Android, разрабатываемой компанией Google Inc. открытым альянсом мобильных телефонов, или платформы QNX® CAR Platform for Infotainment, предлагаемой компанией QNX Software Systems. Примеры вычислительных устройств включают в себя, без ограничения, бортовой компьютер транспортного средства, компьютерную рабочую станцию, сервер, настольный компьютер, ноутбук, портативный или карманный компьютер или некоторую другую вычислительную систему и/или устройство.
[0077] Вычислительные устройства, как правило, включают в себя компьютерно-исполняемые инструкции, при этом инструкции могут исполняться одним или более вычислительными устройствами, такими как перечисленные выше. Компьютерно-исполняемые инструкции могут быть компилированы или интерпретированы из компьютерных программ, созданных с использованием множества языков и/или технологий программирования, включающих в себя, без ограничения, отдельно или в комбинации, Java™, C, C++, Visual Basic, Java Script, Perl и т.д. Некоторые из этих вариантов применения могут быть компилированы и выполнены на виртуальной машине, такой как виртуальная машина Java, виртуальная машина Dalvik и т.п. В целом, процессор (например, микропроцессор) принимает инструкции, например, из памяти, компьютерно-читаемого носителя и т.д. и выполняет эти инструкции, таким образом, выполняя один или более процессов, включающих в себя один или более процессов, описанных в данном документе. Такие инструкции и другие данные могут быть сохранены и передаваться с помощью множества компьютерно-читаемых носителей.
[0078] Компьютерно-читаемый носитель (также называемый процессорно-читаемым носителем) включает в себя любой невременный (например, материальный) носитель, который участвует в предоставлении данных (например, инструкций), которые могут быть считаны компьютером (например, процессором компьютера). Такой носитель может принимать многие формы, включающие в себя, но не только, энергонезависимые носители и энергозависимые носители. Энергонезависимые носители могут включать в себя, например, оптические или магнитные диски и другое постоянное запоминающее устройство. Энергозависимые носители могут включать в себя, например, динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Такие инструкции могут быть переданы посредством одной или более сред передачи данных, включающих в себя коаксиальные кабели, медный провод и оптические волокна, включающие в себя провода, которые содержат системную шину, соединенную с процессором компьютера. Обычные формы компьютерно-читаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфорационную карту, бумажную ленту, любой другой физический носитель с рисунками отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любую другую микросхему памяти или картридж, или любой другой носитель, с которого компьютер может выполнять считывание.
[0079] Базы данных, репозитории данных или другие хранилища данных, описанные в данном документе, могут включать в себя различные виды механизмов для сохранения, осуществления доступа и извлечения различных видов данных, включающих в себя иерархическую базу данных, набор файлов в файловой системе, базу данных приложений в собственном формате, систему управления реляционными базами данных (RDBMS) и т.д. Каждое такое хранилище данных, в общем, включается в вычислительное устройство с использованием компьютерной операционной системы, к примеру, одной из компьютерных операционных систем, упомянутых выше, и является доступным через сеть любым одним или более из множества способов. Файловая система может быть доступна из операционной системы компьютера и может включать в себя файлы, сохраненные в различных форматах. RDBMS, как правило, применяет язык структурированных запросов (SQL) в дополнение к языку для создания, хранения, редактирования и выполнения сохраненных процедур, такой как язык PL/SQL, упомянутый выше.
[0080] В некоторых примерах элементы системы могут быть реализованы как компьютерно-читаемые инструкции (например, программное обеспечение) на одном или более вычислительных устройствах (например, серверах, персональных компьютерах и т.д.), сохраненные на считываемых компьютером носителях, ассоциированных с ним (например, дисках, запоминающих устройствах и т.д.). Компьютерный программный продукт может содержать такие инструкции, сохраненные на считываемых компьютером носителях, для выполнения функций, описанных в данном документе.
[0081] Процессор реализуется через схемы, микросхемы или другой электронный компонент и может включать в себя один или более микроконтроллеров, одну или более программируемых пользователем вентильных матриц (FPGA), одну или более специализированных интегральных схем (ASIC), один или более цифровых сигнальных процессоров (DSP), одну или более потребительских интегральных схем и т.д. Процессор может быть запрограммирован с возможностью обрабатывать данные датчиков. Обработка данных может включать в себя обработку прямой видеотрансляции или другого потока данных, захваченного посредством датчиков, чтобы определять полосу движения дороги рассматриваемого транспортного средства и присутствие любых целевых транспортных средств. Как описано ниже, процессор инструктирует компонентам транспортного средства активироваться в соответствии с данными датчиков. Процессор может быть включен в контроллер, например, контроллер автономного режима.
[0082] Память (или устройство хранения данных) реализуется через схемы, кристаллы или другие электронные компоненты и может включать в себя одно или более из постоянного запоминающего устройства (ROM), оперативного запоминающего устройства (RAM), флэш-памяти, электрически программируемого запоминающего устройства (EPROM), электрически программируемого и стираемого запоминающего устройства (EEPROM), встроенной MultiMediaCard (eMMC), жесткого диска либо любых энергозависимых или энергонезависимых носителей и т.д. Память может сохранять данные, собранные из датчиков.
[0083] Изобретение было описано иллюстративным образом, и должно быть понятно, что терминология, которая была использована, предполагает быть скорее в сущности слов описания, чем ограничения. Многие модификации и вариации настоящего изобретения возможны в свете вышеописанных учений, и изобретение может быть применено на практике иначе, чем конкретно описано.
Реферат
Предложен компьютер, содержащий процессор и память, хранящую инструкции для осуществления этапов, выполняемых процессором. Принимают данные изображения, которые включают в себя сиденье транспортного средства и водителя или пассажира в салоне транспортного средства. Определяют, с помощью принятых данных изображения, ориентацию сиденья транспортного средства и ориентацию водителя или пассажира. На основе определения выполняют функцию транспортного средства, которая включает в себя перемещение, наклон или поворот сиденья транспортного средства или их сочетание. Предложены также компьютер и способ функционирования транспортного средства. Достигается наблюдение за салоном транспортного средства. 3 н. и 15 з.п. ф-лы, 7 ил.
Комментарии