Устройство управления электродвигателем для электрического транспортного средства - RU2484986C1
Код документа: RU2484986C1
Чертежи










Описание
Область техники
Настоящее изобретение относится к устройству управления электродвигателем для электрического транспортного средства.
Предшествующий уровень техники
В электромобиле, который приводит в движение ведущие колеса посредством крутящих моментов приведения в движение, выдаваемых от множества электродвигателей, предпочтительно приводить в действие соответствующие электродвигатели таким образом, чтобы суммарный КПД электродвигателей был максимальным, с точки зрения потребления энергии. Однако когда соответствующие электродвигатели приводятся в действие, с учетом предпочтения в максимальном КПД, один или более электродвигателей могут, например, приводиться в действие с мгновенной номинальной мощностью. Когда электродвигатель непрерывно приводится в действие с мгновенной номинальной мощностью в течение длительного времени, температура электродвигателя может превышать допустимую температуру. В это время, когда температура электродвигателя превышает допустимую температуру, электродвигатель повреждается. Соответственно, в предшествующем уровне техники была предложена технология для разрешения вышеупомянутой проблемы, в которой предельные значения максимальных выходных мощностей (крутящих моментов приведения в движение) электродвигателей соответственно устанавливаются в соответствии с температурами соответствующих электродвигателей, и соответствующие электродвигатели приводятся в действие на основе предельных значений в соответствии с результатами детектирования температур соответствующих электродвигателей (ссылка на JP-07-46721A).
Однако вышеупомянутый предшествующий уровень техники просто выполняет управление приведением в действие электродвигателей на основе детектированных температур соответствующих электродвигателей. Следовательно, на управление приведением в действие соответствующих электродвигателей легко влияет неоднородность, включенная в детектированные температуры соответствующих электродвигателей, задержка времени детектирования, необходимая, чтобы детектировать температуру электродвигателей и т.п. Таким образом, существует необходимость улучшения подавления генерирования тепла от электродвигателей.
Краткое изложение существа изобретения
Задачей настоящего изобретения является предоставление устройства управления электродвигателем для электромобиля, которое подходит для более точного подавления генерирования тепла от электродвигателя, в то же время обеспечивая требуемый крутящий момент.
Для того, чтобы решить задачу, согласно изобретению, предоставляется устройство управления электродвигателем для электрического транспортного средства, включающего в себя первый электродвигатель, чтобы приводить в движение передние колеса электрического транспортного средства, и второй электродвигатель, чтобы приводить в движение задние колеса электрического транспортного средства, причем устройство управления электродвигателем содержит: блок управления приводом электродвигателя, который распределяет требуемый крутящий момент, который требуется для электрического транспортного средства и управляет первым и вторым электродвигателями; блок определения, который подсчитывает время, в течение которого крутящий момент, распределенный одному из первого и второго электродвигателей, является опорным крутящим моментом, который предварительно задан для одного из первого и второго электродвигателей, или более высоким, и определяет, является ли подсчитанное время предварительно определенным временем или более длительным; и блок управления распределением крутящего момента приведения в движение, который, когда подсчитанное время является предварительно определенным временем или более длительным, уменьшает крутящий момент приведения в движение, распределенный одному из первого и второго электродвигателей, ниже опорного крутящего момента и увеличивает крутящий момент приведения в движение, распределенный другому из первого и второго электродвигателей.
Устройство управления электродвигателем может дополнительно содержать: блок детектирования оборотов, который детектирует число оборотов первого и второго электродвигателей, соответственно, и блок установки опорного крутящего момента, который устанавливает соответствующие опорные крутящие моменты первого и второго электродвигателей на основе номинальных значений, указывающих верхние пределы крутящих моментов приведения в движение, определенные в соответствии с числом оборотов первого и второго электродвигателей.
Устройство управления электродвигателем может дополнительно содержать блок детектирования температуры, который детектирует температуру первого и второго электродвигателей, соответственно. Соответствующие опорные крутящие моменты первого и второго электродвигателей могут быть установлены на основе номинальных значений, указывающих верхние переделы крутящих моментов приведения в движение, определенных в соответствии с температурами первого и второго электродвигателей.
Устройство управления электродвигателем может дополнительно содержать: блок детектирования потребления мощности, который детектирует потребление мощности первого и второго электродвигателей, соответственно, и блок установки предварительно определенного времени, который изменяет предварительно определенное время на меньшее значение, когда потребление мощности первого и второго электродвигателей увеличивается.
Блок установки предварительно определенного времени может изменять предварительно определенное время на меньшее значение, когда температура первого и второго электродвигателей увеличивается.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
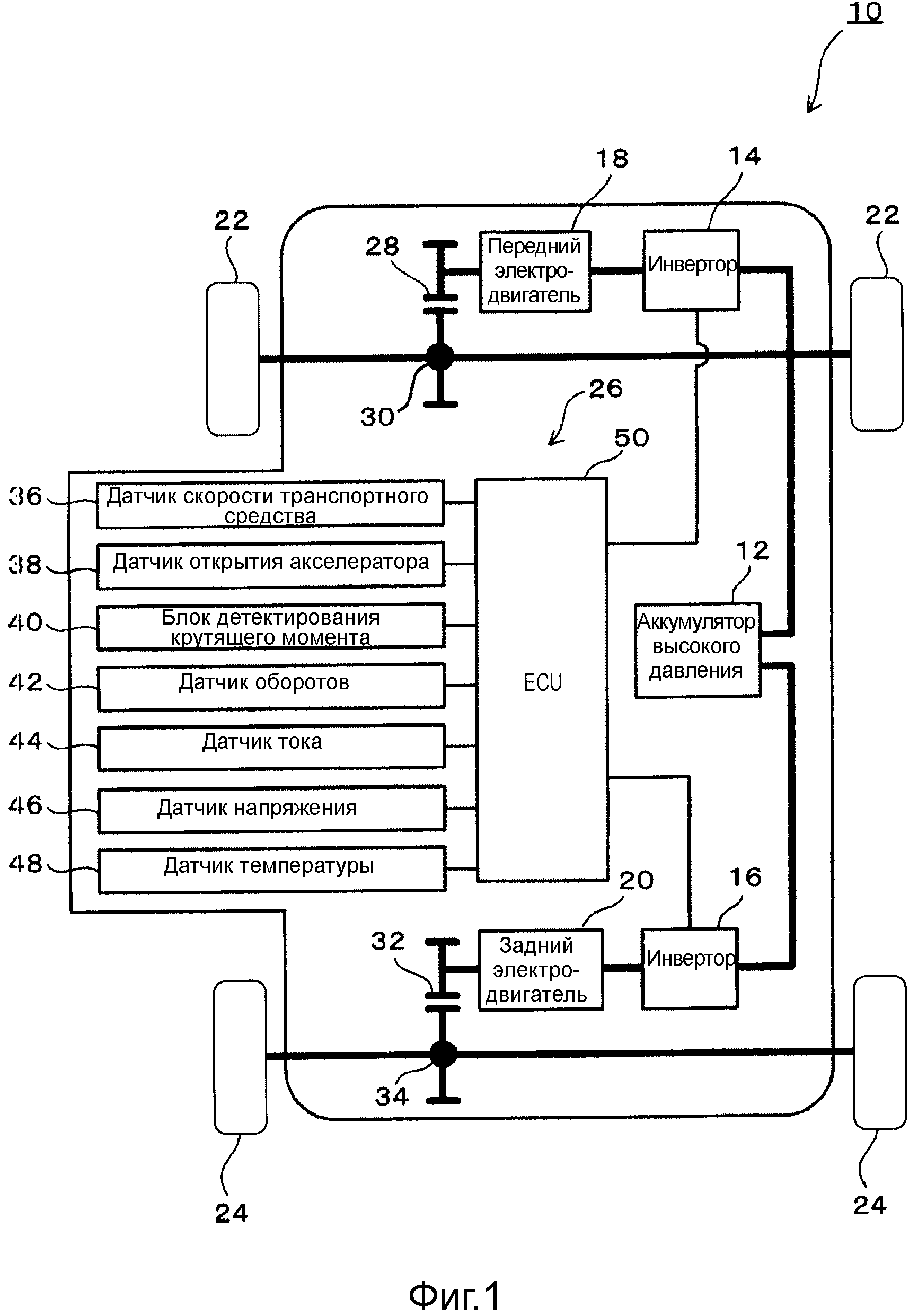
Фиг.1 изображает блок-схему полной конфигурации транспортного средства, имеющего устройство управления электродвигателем, установленное на нем, согласно иллюстративному варианту осуществления изобретения.
Фиг.2 изображает функциональную блок-схему конфигурации устройства управления электродвигателем.
Фиг.3 изображает характеристику крутящего момента в зависимости от числа оборотов для иллюстрации КПД электродвигателя.
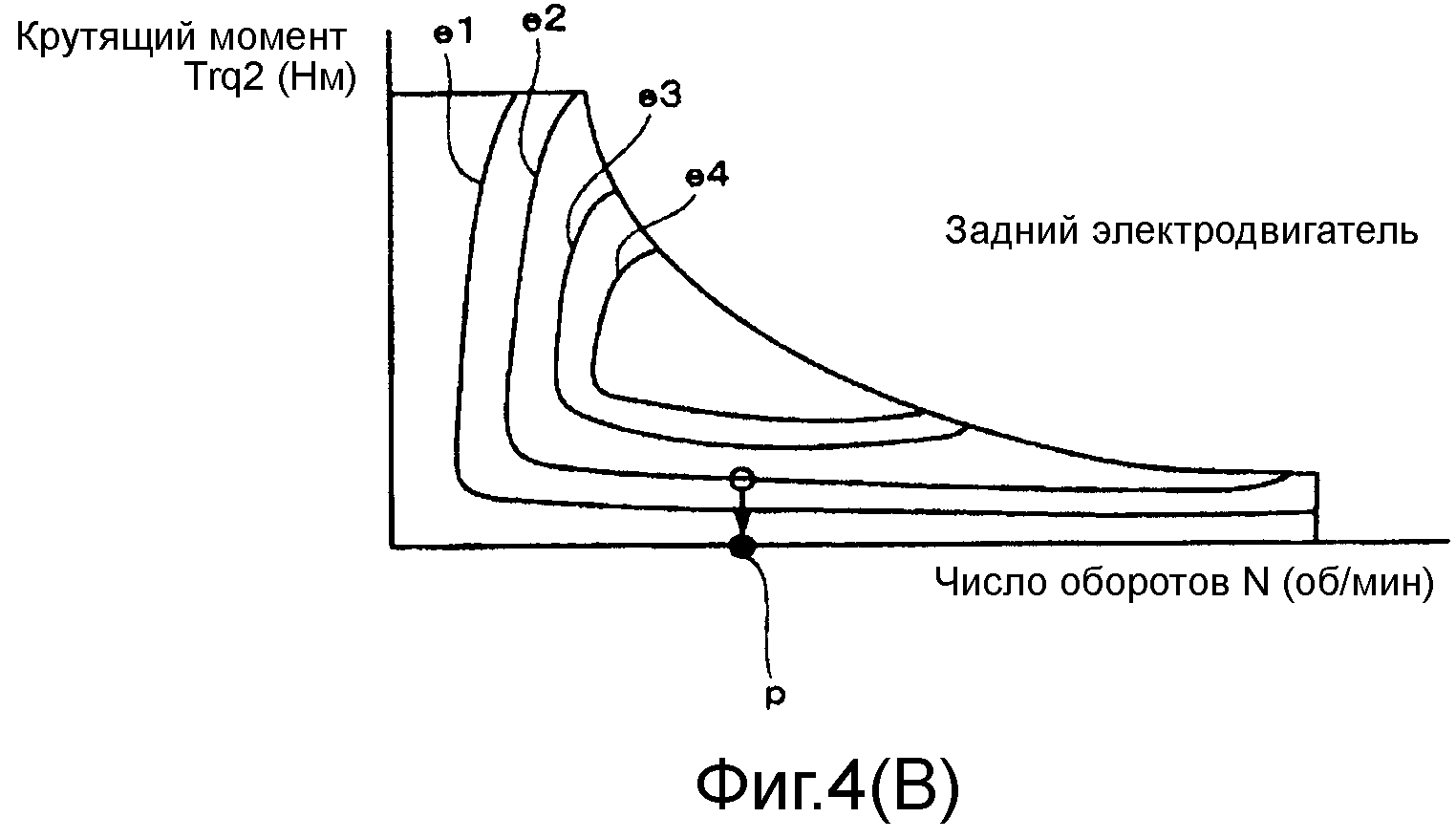
Фиг.4(A) и 4(B) изображают характеристики крутящего момента в зависимости от числа оборотов для иллюстрации соотношений между рабочими точками P соответствующих электродвигателей и КПД электродвигателей.
Фиг.5 изображает характеристику крутящего момента в зависимости от числа оборотов для иллюстрации одноминутной номинальной производительности и 60-минутной номинальной производительности соответствующих электродвигателей.
Фиг.6(A) и 6(B) изображают характеристики крутящего момента в зависимости от числа оборотов для иллюстрации соотношений между рабочими точками P соответствующих электродвигателей и номинальными производительностями электродвигателей.
Фиг.7 изображает трехмерную диаграмму, на которой число оборотов N, температура Tmot электродвигателя и опорный крутящий момент Trq0 заданы соответствующими друг другу.
Фиг.8 изображает соотношение между температурой Tmot электродвигателя и поправочным коэффициентом k температуры.
Фиг.9 изображает трехмерную диаграмму, на которой температура Tmot электродвигателя, потребляемая мощность Pmot и опорное время (предварительно определенное время) T0 заданы соответствующими друг другу.
Фиг.10 изображает блок-схему, показывающую работу устройства управления электродвигателем.
Описание предпочтительных вариантов осуществления
Далее в данном документе, иллюстративные варианты осуществления настоящего изобретения будут описаны со ссылкой на чертежи. Как показано на фиг.1, транспортное средство 10 является электрическим транспортным средством (электромобилем). Транспортное средство 10 имеет аккумулятор 12 высокого давления, инверторы 14, 16, передний электродвигатель 18, задний электродвигатель 20, передние колеса 22, задние колеса 24, охлаждающее устройство 52 и устройство 26 управления электродвигателем согласно иллюстративному варианту осуществления изобретения. Аккумулятор 12 высокого давления подает энергию к переднему электродвигателю 18 и заднему электродвигателю 20. Инверторы 14, 16 преобразуют энергию постоянного тока, подаваемую от аккумулятора 12 высокого давления, в энергию трехфазного переменного тока и подают ее на передний электродвигатель 18 и задний электродвигатель 20, соответственно. Инверторы 14, 16 управляют мощностями трехфазного переменного тока, которые подаются на передний электродвигатель 18 и задний электродвигатель 20, например, посредством широтно-импульсной модуляции (PWM) на основе управления от электронного блока управления (ECU 50) (который будет описан ниже), так что крутящие моменты приведения в движение, выводимые от переднего электродвигателя 18 и заднего электродвигателя 20, управляются. Передний электродвигатель 18 вращается посредством энергии переменного тока, подаваемой от инвертора 14, и обеспечивает энергию (крутящий момент приведения в движение) передним колесам 22 через редукторный механизм 28 и дифференциальный механизм 30, таким образом, приводя в движение передние колеса 22. Задний электродвигатель 20 вращается посредством энергии трехфазного переменного тока, подаваемой от инвертора 16, и обеспечивает энергию (крутящий момент приведения в движение) задним колесам 24 через редукторный механизм 32 и дифференциальный механизм 34, таким образом приводя в движение задние колеса 24. Между тем, передний электродвигатель 18 соответствует одному из первого и второго электродвигателей, а задний электродвигатель 20 соответствует другому из первого и второго электродвигателей. Аккумулятор 12 высокого давления заряжается энергией, которая подается от источника питания (домашнего источника питания), источника питания для быстрого заряда зарядного стенда и т.п. через зарядное устройство (не показано). Также, когда транспортное средство 10 находится в состоянии рекуперативного торможения, передний электродвигатель 18 и задний электродвигатель 20 функционируют как генератор, и мощности трехфазного переменного тока, генерируемые в переднем электродвигателе 18 и заднем электродвигателе 20, преобразуются в мощности постоянного тока через инверторы 14, 16, которые затем накапливаются в аккумуляторе 12 высокого давления. Охлаждающее устройство 30 управляется посредством ECU 50 (который будет описан позже) и охлаждает передний электродвигатель 18 и задний электродвигатель 20, так что температуры Tmot переднего электродвигателя 18 и заднего электродвигателя 20, которые детектируются датчиком 48 температуры (который будет описан ниже), не превышают допустимой температуры, на основе детектированных температур. Когда охлаждающее устройство 30 работает, охлаждающая жидкость циркулирует, чтобы охлаждать соответствующие электродвигатели 18, 20. Также, когда температуры электродвигателей 18, 20 значительно увеличиваются, охлаждающее устройство охлаждает охлаждающую жидкость посредством радиатора.
Устройство 26 управления электродвигателем имеет датчик 36 скорости транспортного средства, датчик 38 открытия акселератора, датчик 40 детектирования крутящего момента, датчик 42 оборотов, датчик 44 тока, датчик 46 напряжения, датчик 48 температуры и ECU 50. Датчик 36 скорости транспортного средства детектирует скорость перемещения транспортного средства 10 и предоставляет ее в ECU 50. Датчик 38 открытия акселератора детектирует открытие (величину срабатывания) педали акселератора и передает ее в ECU 50. Датчик 40 детектирования крутящего момента соответственно детектирует крутящие моменты приведения в движение, выводимые от переднего электродвигателя 18 и заднего электродвигателя 20, и предоставляет их в ECU 50. В то же время, датчик 40 детектирования крутящего момента может быть сконфигурирован посредством датчиков крутящего момента, предусмотренных на ведущих валах переднего электродвигателя 18 и заднего электродвигателя 20. Блок 40 детектирования крутящего момента может вычислять (оценивать) соответствующие крутящие моменты приведения в движение на основе управляющих величин соответствующих электродвигателей 18, 20, предоставленных из ECU 50 соответствующим инверторам 14, 16. В этом случае блок 40 детектирования крутящего момента может быть сконфигурирован посредством ECU 50. Датчик 42 оборотов соответственно детектирует число оборотов переднего электродвигателя 18 и заднего электродвигателя 20 и предоставляет его в ECU 50 и конфигурирует блок детектирования оборотов. Датчик 44 тока соответственно детектирует токи мощностей трехфазного переменного тока, подаваемых на передний электродвигатель 18 и задний электродвигатель 20, и предоставляет их в ECU 50. Датчик 46 напряжения соответственно детектирует напряжения мощностей трехфазного переменного тока, подаваемых на передний электродвигатель 18 и задний электродвигатель 20, и предоставляет их в ECU 50. Датчик 48 температуры соответственно детектирует температуры Tmot переднего электродвигателя 18 и заднего электродвигателя 20 и предоставляет их в ECU 50 и конфигурирует блок детектирования температуры.
ECU 50 включает в себя процессорный блок (CPU), постоянное запоминающее устройство (ROM), которое хранит управляющую программу и т.п., оперативную память (RAM), которая является рабочей областью управляющей программы, блок интерфейса, который взаимодействует с периферийной схемой и т.п., и т.п. Как показано на фиг.2, ECU 50 выполняет управляющую программу, чтобы реализовывать первый блок 50A управления приводом (блок управления приводом электродвигателя), блок 50B определения, второй блок 50C управления приводом (блок управления распределением крутящего момента приведения в движение), блок 50D установки опорного крутящего момента, блок 50E детектирования потребления мощности и блок 50F установки опорного времени (предварительно определенного времени).
Когда крутящие моменты приведения в движение, выводимые от переднего электродвигателя 18 и заднего электродвигателя 20, являются первым и вторым крутящими моментами Trq1, Trq2 приведения в движение, соответственно, первый блок 50A управления приводом распределяет требуемый крутящий момент Trqd, который требуется операцией движения водителя, на первый и второй крутящие моменты Trq1, Trq2 приведения в движение, так что суммарный КПД переднего электродвигателя 18 и заднего электродвигателя 20 становится максимальным, таким образом управляя передним электродвигателем 18 и задним электродвигателем 20. В частности, первый блок 50A управления приводом предоставляет инверторам 14, 16 управляющие инструкции, которые необходимы, чтобы позволять переднему электродвигателю 18 и заднему электродвигателю 20 выдавать первый и второй крутящие моменты Trq1, Trq2 приведения в движение. В то же время, требуемый крутящий момент Trqd является крутящим моментом, который необходим, чтобы приводить в движение транспортное средство 10, и вычисляется посредством первого блока 50A управления приводом на основе открытия акселератора, детектированного датчиком 38 открытия акселератора, и скорости транспортного средства, детектированной датчиком 36 скорости транспортного средства, когда педаль акселератора задействуется во время ускорения, торможения или движения с постоянной скоростью.
Здесь, в частности, описывается КПД электродвигателя. Фиг.3 изображает характеристику крутящего момента в зависимости от числа оборотов для иллюстрации КПД электродвигателя, причем горизонтальная ось указывает число оборотов N (об/мин), а вертикальная ось указывает крутящий момент Trq (Нм). Кривые e1, e2, …, en указывают контурные линии КПД e, при котором удовлетворяется соотношение e1 < e2 < … < en. Соответственно, ввиду характеристики крутящего момента в зависимости от числа оборотов, позиционируя рабочую точку p электродвигателя в области, в которой КПД e становится выше, возможно обеспечивать более высокий КПД e электродвигателя, что способствует уменьшению потребляемой мощности.
Как показано на фиг.4(A) и 4(B), когда удовлетворяется любой требуемый крутящий момент Trqd, это считается соответственно позицией рабочих точек P переднего электродвигателя 18 и заднего электродвигателя 20, как показано с помощью символа ○. В этом случае первый и второй крутящие моменты Trq1, Trq2 соответственно больше 0 (нуля). Однако когда требуемый крутящий момент Trqd может удовлетворяться посредством приведения в движение только одного электродвигателя, для того чтобы максимизировать суммарный КПД переднего электродвигателя 18 и заднего электродвигателя 20, предпочтительно позиционировать рабочую точку p переднего электродвигателя 18, который является одним электродвигателем, в диапазоне высокого КПД и позиционировать рабочую точку p заднего электродвигателя 20, который является другим электродвигателем, в позиции крутящего момента Trq2=0 приведения в движение, как показано с помощью символа ● на фиг.4(A) и 4(B).
Блок 50B определения определяет, является ли время, в течение которого один из первого и второго крутящих моментов Trq1, Trq2 приведения в движение превышает предварительно определенный опорный крутящий момент Trq0, предварительно установленным опорным временем (предварительно определенным временем) T0 или более длительным. Опорный крутящий момент Trq0 устанавливается посредством блока 50D установки опорного крутящего момента, который будет описан ниже, а опорное время T0 устанавливается посредством блока 50F установки опорного времени (предварительно определенного времени), который будет описан позже.
Когда определяется, что время является опорным временем T0 или более длительным, второй блок 50C управления приводом уменьшает крутящий момент приведения в движение электродвигателя, для которого определяется, что время является опорным временем T0 или более длительным, ниже опорного крутящего момента Trq0 и увеличивает крутящий момент приведения в движение другого электродвигателя, таким образом удовлетворяя требуемому крутящему моменту Trqd. Выполняя это, и в то же время удовлетворяя требуемому крутящему моменту Trqd, возможно исключать превышение допустимой температуры одного из переднего электродвигателя 18 и заднего электродвигателя 20, что будет описано далее.
Блок 50D установки опорного крутящего момента устанавливает опорный крутящий момент Trq0 на основе числа оборотов N, детектированных датчиком 42 оборотов. Установка опорного крутящего момента Trq0 посредством блока 50D установки опорного крутящего момента выполняется на основе номинального значения, указывающего верхний предел крутящего момента приведения в движение, определенный в соответствии с числом оборотов N.
Далее описывается номинальная производительность электродвигателя. Фиг.5 изображает характеристику крутящего момента в зависимости от числа оборотов для иллюстрации номинальной производительности электродвигателя, где горизонтальная ось указывает число оборотов N (об/мин), а вертикальная ось указывает крутящий момент Trq (Нм). В этом примере одноминутная номинальная производительность и 60-минутная номинальная производительность в качестве номинальной производительности определяются следующим образом. Т.е., сплошная линия указывает одноминутную номинальную производительность. Одноминутная номинальная производительность указывает число оборотов N и крутящий момент Trq, при которых электродвигатель превышает допустимую температуру, когда электродвигатель приводится в движение в течение одной минуты или дольше. Также, пунктирная линия указывает 60-минутную номинальную производительность. 60-минутная номинальная производительность указывает число оборотов N и крутящий момент Trq, при которых электродвигатель превышает допустимую температуру, когда электродвигатель приводится в движение в течение 60 минут или дольше. Соответственно, когда рабочая точка p электродвигателя, указанная посредством числа оборотов N и крутящего момента Trq, располагается на линии, указывающей одноминутную номинальную производительность, или в диапазоне за пределами одноминутной номинальной производительности, электродвигатель превышает допустимую температуру за короткий временной интервал. Для того чтобы исключать превышение допустимой температуры, необходимо задействовать охлаждающее устройство 56, чтобы осуществлять циркуляцию охлаждающей жидкости или охлаждать охлаждающую жидкость посредством радиатора. С точки зрения экономии энергии, предпочтительно понижать частоту срабатывания охлаждающего устройства 52. Следовательно, необходимо ограничивать использование электродвигателя в условиях (число оборотов N и крутящий момент Trq), в которых электродвигатель превышает допустимую температуру, насколько возможно. Кроме того, когда рабочая точка p электродвигателя располагается на линии, указывающей 60-минутную номинальную производительность, температура электродвигателя превышает допустимую температуру, если электродвигатель приводится в движение более 60 минут. В этом иллюстративном варианте осуществления крутящий момент, который определяется как промежуточное значение между одноминутной номинальной производительностью и 60-минутной номинальной производительностью, используется в качестве номинального значения, указывающего верхний предел крутящего момента приведения в движение. Соответственно, блок 50D установки опорного крутящего момента хранит данные номинальных значений (крутящих моментов) как карту соответствия и считывает крутящий момент Trq, соответствующий числу оборотов N из карты соответствия, таким образом устанавливая опорный крутящий момент Trq0. В то же время, строго говоря, одноминутная номинальная производительность или 60-минутная номинальная производительность также изменяется посредством температуры Tmot электродвигателя. Следовательно, в этом иллюстративном варианте осуществления, как показано на фиг.7, трехмерный график, на котором число оборотов N (об/мин), температура Tmot электродвигателя (°C) и опорный крутящий момент Trq0 (Нм) заданы соответствующими друг другу, формируется и устанавливается в блоке 50D установки опорного крутящего момента. Затем используется карта, чтобы устанавливать опорный крутящий момент Trq0. Другими словами, настройка опорного крутящего момента Trq0 посредством блока 50D установки опорного крутящего момента выполняется на основе номинального значения, указывающего верхний предел крутящего момента приведения в движение, определенного в соответствии с числом оборотов N и температурой Tmot электродвигателя.
Блок 50E детектирования потребляемой мощности детектирует потребляемую мощность P переднего электродвигателя 18 и заднего электродвигателя 20, соответственно. В этом иллюстративном варианте осуществления блок 50E детектирования потребляемой мощности вычисляет потребляемую мощность P на основе токов I, подаваемых к соответствующим электродвигателям 18, 20, которые детектируются датчиком 44 тока, и напряжений, подаваемых к соответствующим электродвигателям 18, 20, которые детектируются датчиком 46 напряжения.
Блок 50F установки опорного времени устанавливает опорное время T0. В этом иллюстративном варианте осуществления, чем выше потребляемая мощность, детектируемая блоком 50E детектирования потребляемой мощности, и выше температура Tmot электродвигателя, тем меньшим должно быть установлено опорное время T0. Т.е., чем выше потребляемая мощность Pmot электродвигателя и выше температура Tmot электродвигателя, тем проще электродвигателю формировать тепло. Соответственно, поскольку существует более высокая вероятность того, что электродвигатель превысит допустимую температуру, необходимо устанавливать опорное время T0 более коротким. Здесь описывается установка опорного времени T0. Опорное время T0 вычисляется посредством следующего уравнения (1).
T0 = k × Tref Уравнение (1)
k - это поправочный коэффициент температуры. Как показано на фиг.8, чем выше температура Tmot электродвигателя, тем больше уменьшается поправочный коэффициент температуры. Tref - это время определения переключения управления, которое определяется следующим уравнением (2).
Tc - это предварительно определенное опорное время определения (фиксированное значение), а Pc - это предварительно определенный выходной показатель (фиксированное значение) электродвигателя. Опорное время Tc определения и выходной показатель Pc определения определяются экспериментально, например, Pmot - это потребляемая мощность электродвигателя, которая выражается следующим уравнением (3) и (4).
I - это ток, детектированный датчиком 44 тока, а V - это напряжение, детектированное датчиком 46 напряжения.
Trq - это крутящий момент приведения в движение электродвигателя, N - число оборотов, а r - коэффициент (фиксированное значение). Коэффициент r определяется, например, экспериментально. Соответственно, опорное время T0 может быть вычислено с помощью уравнений (1), (2) и (3) или уравнений (1), (2) и (4) на основе детектированной температуры Tmot электродвигателя и потребляемой мощности Pmot. Альтернативно, вместо использования вышеуказанных уравнений, как показано на фиг. 9, блоку 50F установки опорного времени может быть предоставлена трехмерная карта соответствия, на которой температура Tmot электродвигателя (°C), потребляемая мощность Pmot (Вт) и опорное время T0 (минуты) заданы соответствующими друг другу, и блок 50F установки опорного времени может использовать карту соответствия, чтобы устанавливать опорное время T0.
Ниже работа устройства 26 управления электродвигателем описывается со ссылкой на блок-схему на фиг.10. Сначала ECU 50 вычисляет и устанавливает опорные крутящие моменты Trq0 на основе детектированного числа оборотов N и температур Tmot электродвигателей (этап S10: блок 50D установки опорного крутящего момента). Затем ECU 50 определяет, выше ли требуемый крутящий момент Trqd, основанный на операции движения водителя, чем опорные крутящие моменты Trq0 (этап S12: блок 50B определения). Когда результат определения на этапе S12 положительный, ECU 50 вычисляет и устанавливает опорное время T0 на основе детектированных температур Tmot электродвигателя и потребляемых мощностей Pmot электродвигателей (этап S14: блок 50F установки опорного времени). Затем ECU 50 инициирует работу счетчика Ccnt, который подсчитывает время, в течение которого соотношение "требуемый крутящий момент Trqd > опорного крутящего момента Trq0" удовлетворяется (этап S16: блок 50B определения). Затем ECU 50 определяет, является ли подсчитанное время из счетчика Ccnt опорным временем T0 или более длительным (этап S18: блок 50B определения). Когда результат определения на этапе S18 положительный, ECU 50 уменьшает крутящий момент Trq приведения в движение электродвигателя, для которого определяется, что время, в течение которого соотношение "требуемый крутящий момент Trqd > опорного крутящего момента Trq0" удовлетворяется, является опорным временем T0 или более длительным, ниже опорного крутящего момента Trq0 и увеличивает крутящий момент Trq приведения в движение другого электродвигателя, таким образом, управляя передним электродвигателем 18 и задним электродвигателем 20 через инверторы 14, 16 с тем, чтобы удовлетворять требуемому крутящему моменту Trqd (этап S20: второй блок 50C управления приводом). С другой стороны, когда результат определения на этапе S12 отрицательный, ECU очищает результат операции подсчета времени счетчика Ccnt для подсчета времени (этап S22) и выполняет обычное управление распределением требуемого крутящего момента Trqd, который требуется операцией движения водителя, на первый и второй крутящие моменты Trq1, Trq2 приведения в движение с тем, чтобы максимизировать суммарный КПД переднего электродвигателя 18 и заднего электродвигателя 20, и, таким образом, управляет передним электродвигателем 18 и задним электродвигателем 20 (этап S24: первый блок 50A управления приводом). Также, когда результат определения на этапе S18 отрицательный, ECU переходит к этапу S24 и выполняет обычную работу.
Вышеописанная работа, в частности, описывается со ссылкой на фиг.6(A) и 6(B). В момент времени, в который выполняется этап S10 на фиг.10, предполагается, что рабочие точки P переднего электродвигателя 18 и заднего электродвигателя 20 расположены соответствующим образом, как показано с помощью символа ○. Т.е., в этом иллюстративном варианте осуществления рабочая точка p переднего электродвигателя 18 находится в позиции, в которой КПД является высоким, рабочая точка заднего электродвигателя 2 находится в позиции, в которой крутящий момент приведения в движение равен нулю (0), и суммарный КПД переднего электродвигателя 18 и заднего электродвигателя 20 максимален. В этом случае, когда результат определения на этапе S18 положительный, рабочая точка p переднего электродвигателя 18 понижается из позиции, показанной с помощью символа ○, в позицию, показанную с помощью символа ●, а рабочая точка заднего электродвигателя 20 повышается из позиции (крутящий момент приведения в движение равен нулю), показанной с помощью символа ○, в позицию, показанную с помощью символа ●, так что формируются крутящие моменты приведения в движение. Соответственно, когда время, в течение которого один из первого и второго крутящих моментов Trq1, Trq2 приведения в движение превышает предварительно определенный опорный крутящий момент Trq0, является предварительно определенным опорным временем T0 или более длительным, управление приводом для распределения крутящего момента с тем, чтобы максимизировать полный КПД переднего электродвигателя 18 и заднего электродвигателя 20, переключается на управление приводом для подавления роста температуры электродвигателя.
Как описано выше, согласно иллюстративному варианту осуществления, когда время, в течение которого один из первого и второго крутящих моментов Trq1, Trq2 приведения в движение превышает предварительно определенный опорный крутящий момент Trq0, является предварительно определенным опорным временем T0 или более длительным, крутящий момент приведения в движение от электродвигателя, для которого определяется, что время является опорным временем T0 или более длительным, уменьшается, чтобы понижать опорный крутящий момент Trq0, и приводная мощность другого электродвигателя увеличивается, так что требуемый крутящий момент Trqd удовлетворяется. Соответственно, обеспечивая требуемый крутящий момент Trqd, благоприятно исключается генерирование электродвигателем тепла и превышение допустимой температуры, которое вызывается вследствие того, что один из переднего электродвигателя 18 и заднего электродвигателя 20 продолжает выводить крутящий момент приведения в движение, более высокий, чем опорный крутящий момент Trq0. В частности, по сравнению с конфигурацией, в которой привод от электродвигателя управляется на основе только температуры электродвигателя, как в предшествующем уровне техники, поскольку на управление приводом меньше влияет неоднородность, включенная в детектированные температуры электродвигателей, задержка времени детектирования, необходимого, чтобы детектировать температуры электродвигателей, и т.п., изобретение более предпочтительно в разрешении проблемы исключения генерирования тепла от электродвигателей. Также, поскольку возможно эффективно исключать генерирование тепла от электродвигателей, благоприятно уменьшается частота срабатывания охлаждающего устройства 52, чтобы осуществлять циркуляцию охлаждающей жидкости или охлаждать охлаждающую жидкость посредством радиатора, так что изобретение также полезно в плане экономии энергии.
В этом иллюстративном варианте осуществления опорный крутящий момент Trq0 устанавливается на основе номинального значения, указывающего верхний предел крутящего момента приведения в движение, определенного в соответствии с числом оборотов N электродвигателя и температурой Tmot электродвигателя. Соответственно, поскольку возможно устанавливать опорный крутящий момент Trq0 в соответствии как с числом оборотов N, так и с температурой Tmot электродвигателя, возможно определять более точно, превышает ли крутящий момент приведения в движение опорный крутящий момент Trq0, так что изобретение полезно в эффективном исключении генерирования тепла от электродвигателей. Также, возможно устанавливать опорный крутящий момент Trq0 на основе номинального значения, указывающего верхний предел крутящего момента приведения в движение, определенного в соответствии только с числом оборотов N. Это полезно при простой установке опорного крутящего момента Trq0. Однако при установке опорного крутящего момента на основе номинального значения, указывающего верхний предел крутящего момента приведения в движение, определенного в соответствии с числом оборотов N электродвигателя и температурой Tmot электродвигателя, как в вышеописанном иллюстративном варианте осуществления, изобретение полезно в более точном определении того, превышает ли крутящий момент приведения в движение опорный крутящий момент Trq0.
Также, в этом иллюстративном варианте осуществления, при установке опорного времени T0, чем выше потребление Pmot энергии электродвигателем и выше температура Tmot электродвигателя, тем меньшим устанавливается опорное время T0. Соответственно, поскольку возможно точно устанавливать опорное время в соответствии как с потребляемой мощностью Pmot, так и с температурой Tmot, возможно определять более точно, является ли время, в течение которого крутящий момент приведения в движение превышает опорный крутящий момент Trq0, опорным временем T0 или более длительным, так что изобретение полезно в эффективном исключении генерирования тепла от электродвигателей.
В этом иллюстративном варианте осуществления электромобиль был описан в качестве транспортного средства 10, имеющего передний электродвигатель 18 и задний электродвигатель 20. Однако изобретение может быть применено к гибридному автомобилю, который является электрическим транспортным средством, имеющим двигатель в дополнение к электродвигателям 18, 20 в качестве источника приведения в движение. Т.е., в изобретении электрическое транспортное средство включает в себя гибридный автомобиль, имеющий двигатель в дополнение к электродвигателям 18, 20 в качестве источника приведения в движение.
Согласно аспекту изобретения, когда время, в течение которого один из крутящих моментов приведения в движение, распределенных первому и второму электродвигателям, превышает предварительно определенный опорный крутящий момент, является предварительно определенным временем или более длительным, крутящий момент приведения в движение электродвигателя, для которого определяется, что время является предварительно определенным временем или более длительным, уменьшается ниже опорного крутящего момента, а крутящий момент приведения в движение другого электродвигателя увеличивается, так что требуемый крутящий момент удовлетворяется. Соответственно, обеспечивая требуемый крутящий момент, возможно исключать генерирование тепла электродвигателем и превышение допустимой температуры, которое вызывается вследствие того, что соответствующий один электродвигатель из первого и второго электродвигателей продолжает выводить крутящий момент приведения в движение, более высокий, чем опорный крутящий момент.
Согласно аспекту изобретения возможно устанавливать опорный крутящий момент более простым способом.
Согласно аспекту изобретения возможно определять более точно, превышают ли крутящие моменты приведения в движение, распределенные по электродвигателям, опорные крутящие моменты.
Согласно аспекту изобретения возможно определять более точно, является ли время, в течение которого крутящий момент приведения в движение превышает опорный крутящий момент, предварительно определенным временем или более длительным.
Согласно аспекту изобретения возможно точно устанавливать предварительно определенное время с тем, чтобы изменять предварительно определенное время на основе температур электродвигателей.
Реферат
Изобретение относится к устройству управления электродвигателем электрического транспортного средства. Устройство управления содержит блок управления приводом электродвигателя, блок определения, блок управления распределением крутящего момента. Блок управления приводом распределяет требуемый крутящий момент и управляет первым и вторым электродвигателями. Блок определения подсчитывает время, в течение которого крутящий момент электродвигателей является опорным крутящим моментом. Опорный крутящий момент предварительно задан для одного из электродвигателей. Блок определения определяет, является ли подсчитанное время предварительно определенным временем или более длительным. Блок управления распределением крутящего момента уменьшает или увеличивает крутящий момент одного из электродвигателей на основе предварительно определенного времени. Технический результат заключается в снижении тепловой нагрузки на электродвигатели и обеспечении требуемого крутящего момента. 4 з.п. ф-лы, 12 ил.
Формула
Документы, цитированные в отчёте о поиске
Система электропривода
Комментарии