Система модульного электрического транспортного средства - RU2642227C2
Код документа: RU2642227C2
Чертежи
Описание
Изобретение относится к области электрических транспортных средств общего назначения и обслуживающих электрических транспортных средств и более конкретно относится к системе модульных сборочных компонентов транспортного средства и к модулям, которая обеспечивает возможность гибкой сборки и технического обслуживания электрических транспортных средств различных конфигураций, использующих разные модули, при помощи стандартизированных способа крепления и центральной шины сети.
УРОВЕНЬ ТЕХНИКИ
Электрические транспортные средства имеют множество различных потребительских и коммерческих применений. Эти транспортные средства обычно содержат привод электрического двигателя и систему аккумуляторной батареи - транспортное средство приводится в действие с использованием энергии, хранящейся в батареях, и когда для батарей это необходимо, они могут быть перезаряжены. На уровне потребителя, в обществе наблюдается распространение электромобилей и других подобных транспортных средств - многие потребители заинтересованы в покупке или в езде на электрическом транспортном средстве в качестве экологического выбора, чтобы свести к минимуму выбросы выхлопных газов.
В коммерческих применениях существуют экологические и другие факторы, в силу которых в некоторых случаях предпочтительнее использовать электрические транспортные средства, чем транспортные средства, использующие двигатели внутреннего сгорания и т.п. Например, в замкнутой рабочей среде часто, желательно, использовать электрические транспортные средства для сведения к минимуму загрязнение окружающей рабочей среды внутренними выбросами, образующимися при горении, при этом сводятся к минимуму проблемы вентиляции и расходы. Часто необходимо минимизировать факторы риска безопасности в рабочей среде, например, путем сведения к минимуму присутствия сжигаемого топлива и подобных материалов внутри окружающей среды. Одним из дополнительных пунктов, связанных с использованием электрических транспортных средств в промышленных условиях, является простота ремонта. Обеспечение доступности электрических транспортных средств, которые имели бы модульную природу, чтобы оптимизировать аспекты ремонта на месте их использования, могло бы улучшить привлекательность этого типа системы для промышленных потребителей.
На сегодняшний день одним из других ограничений при внедрении электрических транспортных средств в горнодобывающее применение и в другие промышленные применения является то, что каждый раз, когда требуется транспортное средство с пользовательской конфигурацией или опциями, это часто требует значительного индивидуального фактического производства. Разнообразие электрических транспортных средств, которые доступны для использования в применениях этих типов, ограничено - потенциально может быть изготовлено ограниченное количество заданных грузоподъемностей или конфигураций. Покупатели, которые нуждаются в оборудовании индивидуальных размеров или функциональности, часто сталкиваются либо со значительными затратами на изготовление на индивидуальной основе, либо с невозможностью заказать более детальный набор конфигураций транспортных средств. Как полагают, на рынке необходимы способ производства или конфигурация транспортного средства, которые обеспечили бы возможность экономичной индивидуальной адаптации транспортных средств для различных пользователей.
Другим ограничением в отношении размера и гибкости доступных конфигураций электрических транспортных средств, которое потенциально ограничивает их коммерческую привлекательность до настоящего времени, опять же особенно в промышленных применениях, являются ограничения по размеру. Существует несколько причин для этого. Во-первых, и, в частности со ссылкой на применения в горном деле снова в качестве примера, множество раз в подземных применениях этими транспортными средствами физически манипулируют на месте в их рабочей среде, например, путем опускания их вниз по стволу шахты. Места доступа к рабочей среде ограничены по размерам так, что транспортные средства, как правило, ограничены меньшими размерами так, чтобы их можно было опустить в рабочую среду через такой ствол или отверстие. Там, где в таких средах необходимы большие транспортные средства, даже размера обычного пикапа, известно, что еще в прошлом компании были даже вынуждены опускать транспортное средство на место вниз по стволу шахты путем разрезания его на части, а затем соединения его обратно свариванием после того, как оно оказалось на месте. Обеспечение электрического транспортного средства типа, который является модульным по сборке, могло бы увеличить возможные доступные самые большие размеры транспортных средств этих типов, что могло бы усилить их коммерческую привлекательность для этих типов клиентов. Считается, что создание системы сборки модульных электрических транспортных средств, в которой все транспортное средство разбито на ряд стандартизированных модулей, в том числе на раму и элементы конструкции вплоть до двигателя и другие системы, могло бы обладать коммерческой привлекательностью и полезностью. Выполнение всего транспортного средства модульным, а не просто прикрепляемых модульных компонентов управления или компонентов системы на унитарном транспортном средстве, представляет собой отличие по сравнению с известным уровнем техники.
Развивая идею собранного модульного транспортного средства, которое обладало бы наибольшей степенью гибкости с точки зрения конфигурации, потребовало бы, чтобы модули компонент, а также все транспортное средство содержало необходимые элементы управления и системы для адаптации к их использованию в различных конфигурациях. Это опять же до настоящего времени не встречалось в известном уровне техники и могло бы превратить концепцию модульного электрического транспортного средства более коммерчески привлекательной, поскольку она не только могла бы обеспечить максимальное количество гибких конфигураций транспортных средств с использованием меньшего количества стандартизированных модулей компонентов, но также привести к производству транспортных средств, которые были более надежными с точки зрения обслуживания на месте, что снова могло бы усилить коммерческую привлекательность такого транспортного средства в промышленных применениях.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Как указано выше, общая концепция настоящего изобретения относится к изготовлению модульного электрического транспортного средства с использованием взаимозаменяемых сборочных модулей транспортного средства. Модульное электрическое транспортное средство, которое может быть собрано из множества модулей, позволит не только обеспечить максимальную гибкость с точки зрения конфигураций, которые могут быть предложены для продажи, на также имеет и практическую пользу для пользователя с точки зрения возможности разборки и сборки транспортного средства для упрощенного обслуживания, а также для использования в применениях, где имеются маршруты доступа к рабочим зонам с минимальными размерами.
Первый вариант осуществления настоящего изобретения представляет собой модульное электрическое транспортное средство, которое содержит множество взаимозаменяемых сборочных модулей транспортного средства. Взаимозаменяемые сборочные модули транспортного средства соединены путем присоединения соединяющих поверхностей модуля, при этом они имеют центральную шину и центральную шину сети, соединенные между собой и проходящие через них. По меньшей мере, два из взаимозаменяемых сборочных модуля транспортного средства представляют собой питаемые сборочные модули транспортного средства, которые содержат ось, проходящую между их двумя осевыми концами, наклонными в направлении движения собранного транспортного средства, и имеющую по меньшей мере одну соединяющую поверхность модуля на ее осевом конце для конструктивного прикрепления к примыкающей соединяющей поверхности модуля смежного сборочного модуля транспортного средства. Оконечный сборочный модуль транспортного средства с питаемой осью может иметь только одну соединяющую поверхность модуля для прикрепления к смежному модулю, при этом, напротив, модуль с двумя концами может быть прикреплен в середине готового транспортного средства.
Питаемые сборочные модули транспортного средства каждый могут также иметь по меньшей мере одну электрически питаемую ось, имеющую колеса, гусеницы с лампой для зацепления с поверхностью и перемещения собранного транспортного средства по освещенной поверхности. Модуль также может содержать центральную шину питания, присоединяемую к центральной шине питания смежных сборочных модулей транспортного средства на примыкающих поверхностях модуля, и центральную шину сети, также присоединяемую к центральной шине сети смежных сборочных модулей транспортного средства на примыкающих поверхностях модуля. Одна центральная шина сети и одна центральная шина питания через собранное транспортное средство обеспечивает минимальную сложность средств управления и максимальную легкость взаимозаменяемости модулей, а также легкость ремонта. Каждый питаемый модуль может также содержать контроллер модуля, присоединенный к и выполненный с возможностью управления по меньшей мере одной электрически питаемой оси и присоединенный к центральной шине сети для коммуникации с контроллерами модуля других сборочных модулей транспортного средства. Посредством использования автономного контроллера модуля внутри каждого модуля снова максимально увеличивается взаимозаменяемость модулей в конфигурации и сборке различных типов готовых транспортных средств.
По меньшей мере один из питаемых сборочных модулей транспортного средства может быть выполнен с возможностью поворота посредством взаимодействия его контроллера модуля с по меньшей мере одной его питаемой осью. Ось может быть выполнена с возможностью поворота множеством различных способов, либо путем обеспечения центрального воздействия поворота на всю совокупность сквозной оси, либо путем установки колеса или гусеницы на каждой стороне модуля на автономной оси с автономным двигателем, так что колеса могут отдельно управляться и поворачиваться. При определенных обстоятельствах также возможно, что выполненная с возможностью поворота ось не является питаемой осью, что также предполагается в пределах объема настоящего изобретения.
Также в сборке этого готового модульного электрического транспортного средства может быть по меньшей мере один взаимозаменяемый сборочный модуль транспортного средства, который содержит источник электрического питания, присоединенный к центральной шине питания транспортного средства. Источник электрического питания может быть батареей или электрической подсистемой питания некоторого типа, которая может быть либо прочно прикрепленной, либо съемной. При использовании центральной шины питания, может использоваться один источник электрического питания для всего транспортного средства вместо необходимости встраивать отдельный источник электрического питания в каждый питаемый модуль.
Транспортное средство может также содержать контроллер транспортного средства, присоединенный к транспортному средству и к центральной шине сети, который может управлять движением и поворотом транспортного средства посредством взаимодействия с контроллерами модуля на питаемых сборочных модулях транспортного средства. Наконец, собранное модульное электрическое транспортное средство может также содержать интерфейс оператора, присоединенный к контроллеру транспортного средства или интегрированный с контроллером транспортного средства, с помощью которого оператор может вести и поворачивать транспортное средство или управлять любыми прикрепленными электрическими вспомогательные модулями и т.п.
Взаимозаменяемые сборочные модули модульного электрического транспортного средства согласно настоящему изобретению могут быть либо оконечными сборочными модулями транспортного средства с одной универсальной модульной поверхностью для прикрепления к смежным модулям, либо они могут быть двунаправленными модулями постольку, поскольку они имеют две противоположные соединяющие поверхности модуля, каждая из которых может быть прикреплена к смежному взаимозаменяемому сборочному модулю транспортного средства. В случае оконечного взаимозаменяемого сборочного модуля транспортного средства, который имеет только одну соединяющую поверхность модуля, этот модуль может включать в себя оконечные элементы сети для центральной шины сети или оконечные элементы питания для центральной шины питания, так что питание или коммуникации и управление на транспортном средстве могут быть надлежащим образом оконцованы на конце транспортного средства.
В дополнение к питаемым сборочным модулям транспортного средства, модульное электрическое транспортное средство согласно настоящему изобретению может также содержать по меньшей мере один непитаемый сборочный модуль транспортного средства, который имеет ось, проходящую между ее двумя осевыми концами и ориентированную в направлении движения собранного транспортного средства, и имеет по меньшей мере одну соединяющую поверхность модуля и ее осевой конец для конструктивного прикрепления к примыкающей соединяющей поверхности модуля смежного сборочного модуля транспортного средства. В случае непитаемого сборочного модуля транспортного средства снова может иметься центральная шина питания, проходящая через него к смежным соединяющим поверхностям модуля, что обеспечивает присоединение центральной шины питания к центральной шине питания смежного сборочного модуля в сборке транспортного средства, а также сходным образом центральная шина сети может проходить через него и быть выполненной с возможностью присоединения к центральной шине сети смежных сборочных модулей транспортного средства примыкающих поверхностей модуля.
Модульное электрическое транспортное средство может также содержать беспроводный приемопередатчик коммуникаций, функционально присоединенный к центральной шине сети, который может обеспечивать беспроводное соединение или коммуникацию либо между взаимозаменяемыми сборочными модулями транспортного средства, некоторыми вспомогательными модулями, либо даже между готовым модульным электрическим транспортным средством и смежными модульными электрическими транспортными средствами для целей управления. Интерфейс оператора может быть присоединен к контроллеру транспортного средства посредством беспроводной коммуникации с беспроводным приемопередатчиком коммуникаций. Как указано в настоящем документе, интерфейс оператора и контроллер транспортного средства также могут быть интегрированы в один аппаратный и программный блок вместо двух отдельных компонентов, причем оба эти подходы рассматриваются как включенные в объем настоящего изобретения. Как указано выше, явно предполагается, что контроллер транспортного средства может управлять движением и поворотом по меньшей мере одного смежного модульного электрического транспортного средства либо посредством проводного, либо беспроводного соединения сети управления между транспортными средствами. В этом случае модульное электрическое транспортное средство может также содержать датчики близости, которые могут обнаруживать, и посредством контроллера транспортного средства и управления центральной сети управления, близость управляющего модульного электрического транспортного средства к указанному по меньшей мере смежному модульному электрическому транспортному средству, подвергаемому управлению.
По меньшей мере один из сборочных модулей транспортного средства также может содержать точки крепления вспомогательного модуля для прикрепления по меньшей мере одного вспомогательного модуля к модульному электрическому транспортному средству. Могут рассматриваться различные типы вспомогательных модулей, в том числе такие элементы, как кабина оператора, модуль с местами для пассажиров, поверхность платформы, контейнер полезной нагрузки, цистерна или даже подъемное устройство или т.п. Существует множество различных типов вспомогательных модулей или внешних устройств, которые могут быть предложены специалистами в данной области техники и дизайна, связанной с использования промышленных транспортных средств, при этом все такие подходы рассматриваются как находящиеся в объеме настоящего изобретения, насколько любое такое приспособление или внешнее устройство может быть присоединяемым к остальной части транспортного средства посредством размещения на нем надлежащей стандартизированной комбинации точек крепления вспомогательного модуля.
Прикрепляемые вспомогательные модули могут использоваться в комбинации с получением кабины оператора, модуля с местами для пассажиров или другого подхода по отношению к транспортному средству. В других случаях сам непитаемый или питаемый сборочный модуль транспортного средства может содержать кабину оператора, модуль с местами для пассажиров или другой вспомогательный элемент, интегрированный с ним, при этом все такие подходы также предлагаются и рассматриваются в пределах объема настоящего изобретения - насколько любые такие интегрированные модули были созданы, любые необходимые соединения с центральной шиной сети управления и центральным шиной питания всего транспортного средства могут быть сделаны также при изготовлении таких модулей.
В случаях, когда система и модульное электрическое транспортное средство согласно настоящему изобретению должны быть изготовлены таким образом, что может быть обеспечено взаимозаменяемое прикрепление различных вспомогательных модулей, по меньшей мере один из сборочных модулей транспортного средства может также содержать по меньшей мере одно соединение сети вспомогательного модуля для присоединения вспомогательного модуля к центральной шине сети собранного транспортного средства или может также содержать по меньшей мере одно соединение питания вспомогательного модуля для присоединения по меньшей мере одного вспомогательного модуля к центральной шине питания для обеспечения питания этих вспомогательных модулей. В случае присоединения дополнительных модулей к собранному транспортному средству, также может быть обеспечена возможность контроллеру транспортного средства управлять любыми такими питаемыми вспомогательными модулями на вспомогательных модулях посредством центральной сети управления и сопутствующих модификаций программного обеспечения транспортного средства на контроллере транспортного средства и связанного интерфейса оператора.
Контроллер транспортного средства может быть распознает конфигурацию сборочных модулей транспортного средства в собранном транспортном средстве либо путем выбора, либо программирования готовой конфигурации оператором на контроллере транспортного средства, или интерфейса оператора, или, в других вариантах, модули могут быть изготовлены таким образом, что отдельные контроллеры модуля на модулях могут обеспечивать соответствующую обратную связь с сетью и контроллером транспортного средства, так что контроллер транспортного средства может понуждать центральную сеть управления на транспортном средстве в собранном состоянии определять конфигурацию, порядок и размещение различных типов сборочных модулей транспортного средства и вспомогательных модулей внутри собранного транспортного средства и либо сообщать оператору о несоответствующей конфигурации, если конфигурация не кажется контроллеру транспортного средства подходящей программному обеспечению для управления, или альтернативно, выбирать соответствующее программное обеспечение управления и программное обеспечение интерфейса оператора для использования с этой конкретной конфигурацией транспортного средства. Как подход ввода вручную, так и подход опроса сети к выбору соответствующего программного обеспечения управления снова рассматриваются как находящиеся в пределах объема настоящего изобретения.
Для обеспечения максимальных скорости и эффективности, с которыми может быть собрано транспортное средство, соединения центральной шины сети или центральной шины питания между смежными сборочными модулями транспортного средства могут быть осуществлены, в случае проводного соединения, с использованием шпоночных кабельных соединений, чтобы обеспечить быстрое надлежащее соединение кабелей в транспортном средстве. Как указано выше, центральная шина сети между смежными сборочными модулями транспортного средства также может быть присоединена или осуществлена посредством беспроводного приемопередатчика коммуникаций между модулями и центральной шиной сети в случае использования беспроводного приемопередатчика на транспортном средстве.
В зависимости от сборки всего модульного электрического транспортного средства, интерфейс оператора может позволять оператору выбирать из множества выбираемых пользователем режимов поворота в зависимости от основания, на котором оно может использоваться.
Как указано выше, каждая соединяющая поверхность модуля взаимозаменяемых сборочных модулей транспортного средства согласно настоящему изобретению может содержать симметричный механизм крепления, который может обеспечивать взаимозаменяемое соединение этой соединяющей поверхности модуля с соединяющей поверхностью модуля другого смежного сборочного модуля транспортного средства. Различные типы точек соединения, которые обеспечивают максимальную структурную целостность готового транспортного средства, могут предлагаться и рассматриваться в пределах объема настоящего изобретения.
Также раскрыта, в дополнение к модульному электрическому транспортному средству согласно настоящему изобретению, центральная сеть управления для использования в модульном электрическом транспортном средстве. Центральная сеть управления содержит средство управления множеством взаимозаменяемых сборочных модулей транспортного средства, которые соединены посредством примыкающих соединяющих поверхностей модуля и имеют центральную шину питания. По меньшей мере два из взаимозаменяемых сборочных модуля транспортного средства в этом транспортном средстве представляют собой питаемые сборочные модули транспортного средства, которые содержат ось, проходящую между ее двумя осевыми концами, ориентированную в направлении движения собранного транспортного средства и имеющую по меньшей мере одну соединяющую поверхность модуля на осевом конце для конструктивного прикрепления к примыкающей соединяющей поверхности модуля смежного сборочного модуля транспортного средства, по меньшей мере одну электрически питаемую ось и центральную шину питания, присоединяемую к центральной шине питания смежных сборочных модулей транспортного средства и примыкающих поверхностях модуля. Также имеется в по меньшей мере одном из питаемых сборочных модулей транспортного средства ось поворота, выполненная с возможностью поворота путем взаимодействия контроллера модуля с указанной по меньшей мере одной осью питания этого модуля для целей поворота собранного транспортного средства, и по меньшей мере один из взаимозаменяемых сборочных модулей транспортного средства содержит источник электрического питания, присоединенный к центральной шине питания транспортного средства для обеспечения питания всего транспортного средства посредством центральной шины питания. Сама центральная сеть управления согласно настоящему изобретению содержит центральную шину питания, проходящую через каждый взаимозаменяемый сборочный модуль и присоединяемую на каждой соединяющей поверхности модуля к центральной шине питания, проходящей через смежные сборочные модули транспортного средства. Также имеется модуль контроллера в этой сети в каждом сборочном модуле транспортного средства, присоединенный к центральной шине сети и центральной шине питания и выполненный с возможностью управлять любыми компонентами питания или поворота на нем. Также имеется контроллер транспортного средства, который является частью сети управления, присоединен к собранному транспортному средству и центральной шине сети и может управлять транспортным средством посредством взаимодействия с контроллерами модуля на сборочных модулях транспортного средства и, путем расширения, может управлять питаемыми осями или другими вспомогательными модулями на нем, при этом к контроллеру транспортного средства присоединен интерфейс оператора, посредством которого оператор может вести и поворачивать транспортное средство. Интерфейс оператора и контроллер транспортного средства могут представлять собой отдельные компоненты или могут быть интегрированы.
Центральная сеть управления согласно настоящему изобретению может также обеспечивать управление вспомогательных модулей, присоединенных к остальной части транспортного средства, причем модуль контроллера на по меньшей мере одном сборочном модуле транспортного средства присоединен к вспомогательному модулю, требующему управления оператора, причем контроллер транспортного средства позволяет оператору управлять этим вспомогательным модулем через интерфейс оператора.
Соединение центральной шины сети в центральной сети управления согласно настоящему изобретению между смежными сборочными модулями транспортного средства может быть беспроводным или проводным. В случае беспроводного соединения, модули должны содержать по меньшей мере один беспроводный приемопередатчик, функционально присоединенный к центральной сети управления для целей коммуникации с другими модулями и необходимыми компонентами на нем.
Другой аспект настоящего изобретения представляет собой взаимозаменяемый сборочный модуль транспортного средства для использования в сборке модульного электрического транспортного средства. Модуль содержит ось, проходящую между ее двумя осевыми концами, ориентированную в направлении движения собранного транспортного средства и имеющую по меньшей мере одну соединяющую поверхность модуля и ее осевой конец для конструктивного прикрепления к примыкающей соединяющей поверхности модуля смежного сборочного модуля транспортного средства. Имеется центральная шина питания, проходящая через него и присоединяемая к центральной шине питания смежных сборочных модулей транспортного средства и примыкающих поверхностей, и центральная шина сети, присоединяемая к центральной шине сети смежных сборочных модулей транспортного средства и примыкающих поверхностей. Также имеется контроллер модуля, присоединенный к центральной шине питания и центральной шине сети. Контроллер модуля может содержать какой-либо элемент, начиная от основного оконечного элемента в модуле с одним концом до более сложного электронного контроллера, способного управлять компонентами питания на питаемой оси или т.п.
Взаимозаменяемый сборочный модуль транспортного средства согласно настоящему изобретению может также иметь одну соединяющую поверхность модуля для прикрепления на конце собранного транспортного средства, если он является оконечным сборочным модулем транспортного средства, или он может иметь две соединяющие поверхности модуля, если он является двунаправленным модулем, который может быть прикреплен в разных местоположениях в собранном транспортном средстве.
Взаимозаменяемый сборочный модуль транспортного средства может также содержать по меньшей мере одну питаемую ось на нем с грунтозацепными средствами, которые могут перемещать транспортное средство по рабочей поверхности. Этот питаемый взаимозаменяемый сборочный модуль транспортного средства может иметь его питаемую ось, функционально присоединенную к центральной шине питания и центральной шине сети и выполненную с возможностью управления посредством соответствующего контроллера модуля с коммуникацией с контроллером транспортного средства. Взаимозаменяемый сборочный модуль транспортного средства, если он содержит по меньшей мере одну питаемую ось, также может быть выполнен с возможностью поворота, что обеспечивает возможность поворота собранного транспортного средства, содержащего этот модуль.
Взаимозаменяемый сборочный модуль транспортного средства согласно настоящему изобретению может также содержать источник электрического питания, присоединенный к центральной шине питания так, чтобы он мог обеспечивать питание всего собранного модульного электрического транспортного средства, содержащего этот модуль.
Взаимозаменяемый сборочный модуль транспортного средства может также содержать одну или более точек крепления вспомогательного модуля для прикрепления к нему по меньшей мере одного вспомогательного модуля. Для размещения крепление и управления различными вспомогательными модулями взаимозаменяемый сборочный модуль транспортного средства может также содержать по меньшей мере одно соединение сети вспомогательного модуля для присоединения вспомогательного модуля к центральной шине сети или по меньшей мере одно соединение питания вспомогательного модуля для присоединения вспомогательного модуля к центральной шине питания.
Каждая соединяющая поверхность модуля взаимозаменяемого сборочного модуля транспортного средства согласно настоящему изобретению может содержать симметричный механизм крепления, который может обеспечивать взаимозаменяемое соединение этой соединяющей поверхности модуля с соединяющей поверхностью модуля одного или более других сборочных модулей транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже со ссылками на прилагаемые чертежи описаны выбранные предпочтительные варианты осуществления настоящего изобретения:
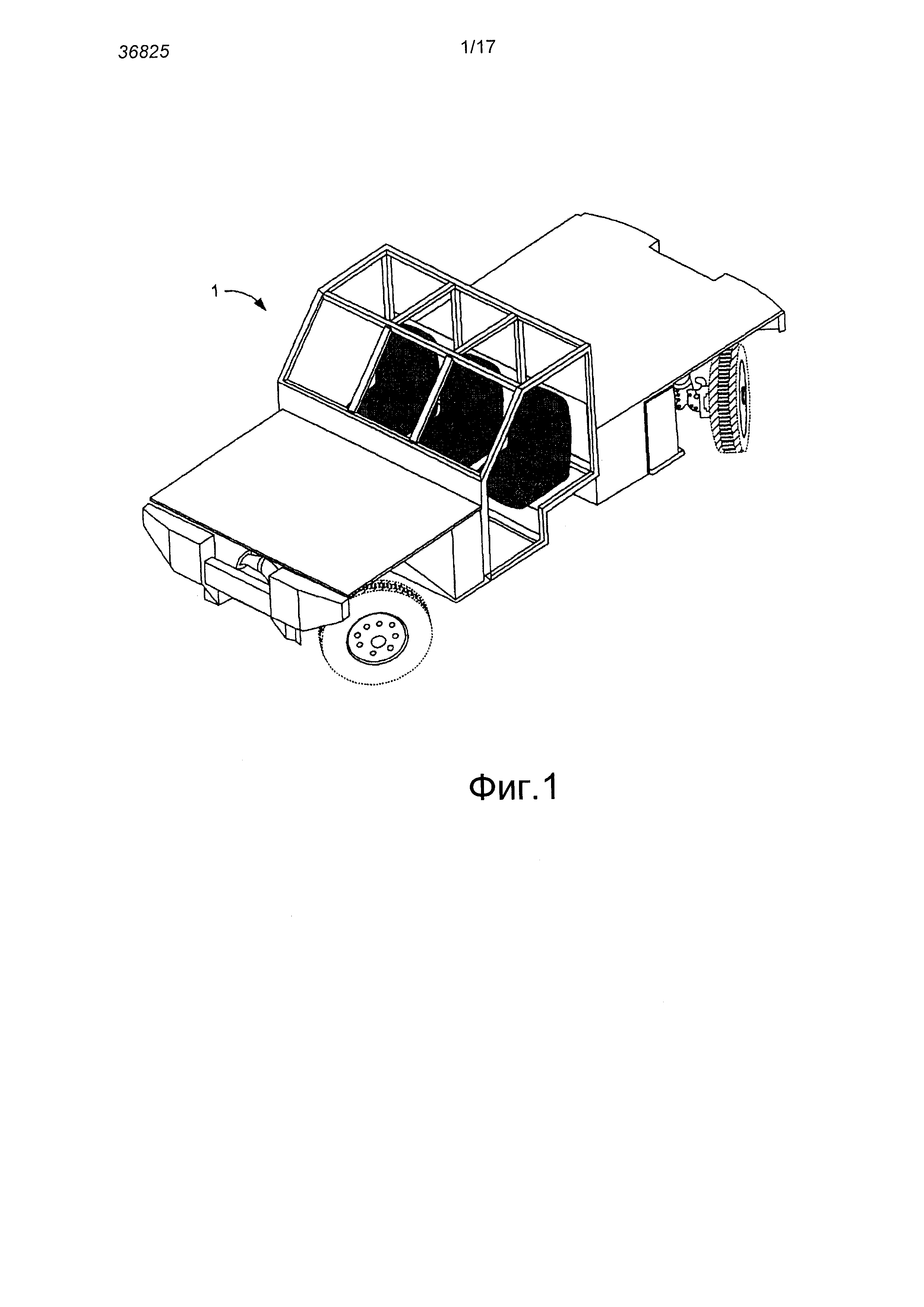
Фиг. 1 представляет собой вид в аксонометрии одного варианта осуществления модульного электрического транспортного средства согласно настоящему изобретению, с двумя питаемыми сборочными модулями поворота транспортного средства;
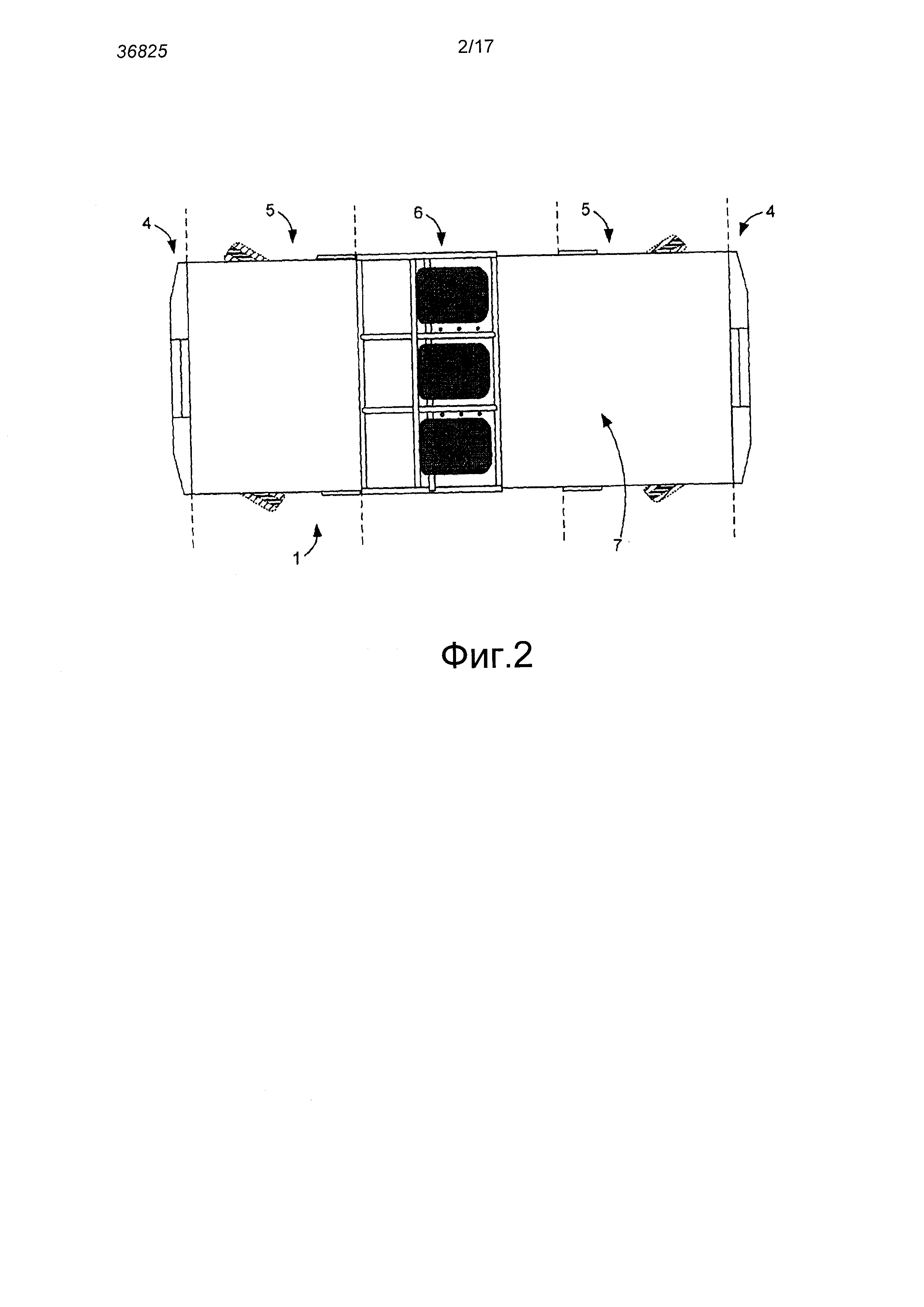
Фиг. 2 представляет собой вид сверху варианта осуществления по фиг. 1;
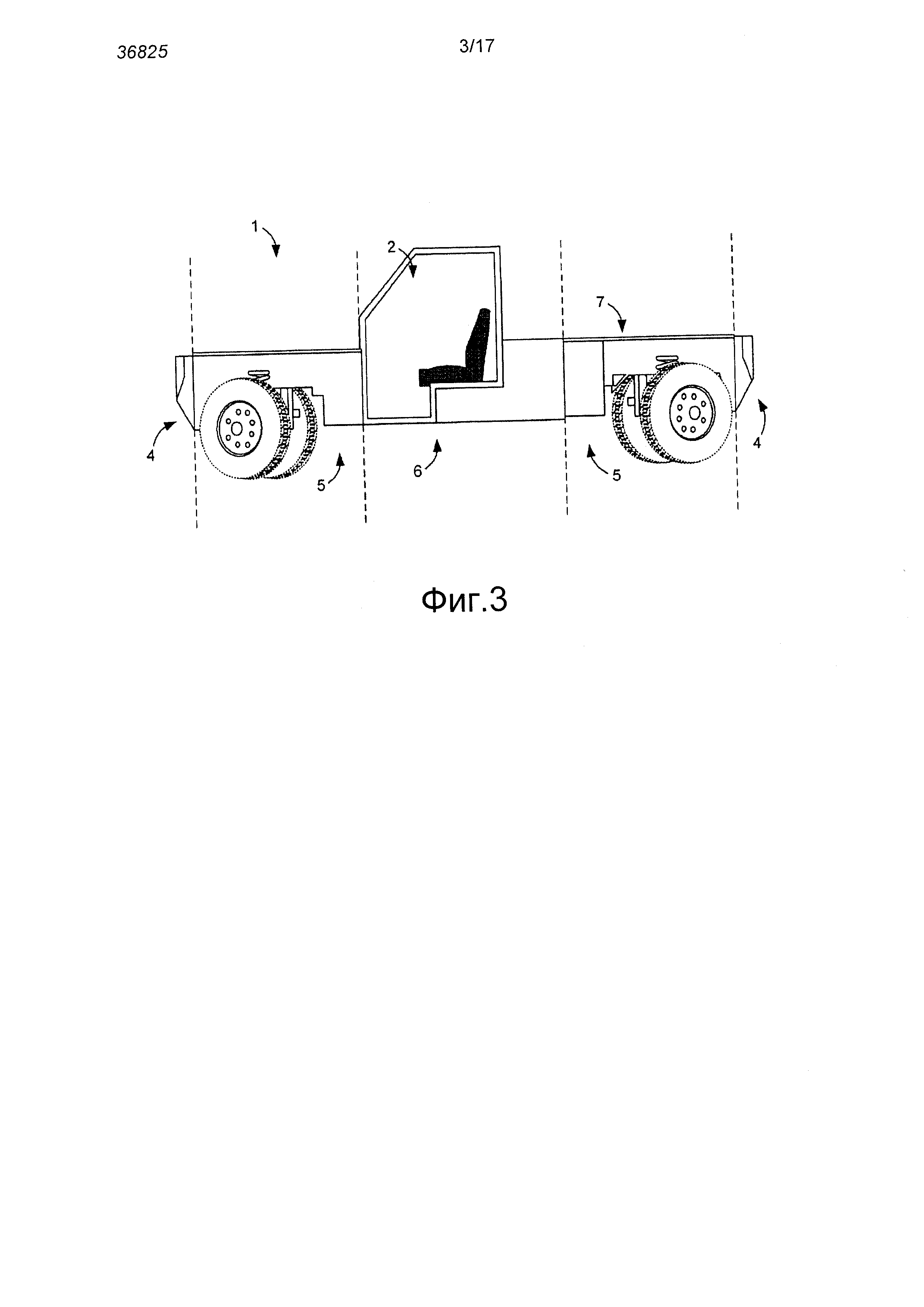
Фиг. 3 представляет собой вид сбоку варианта осуществления по фиг. 1;
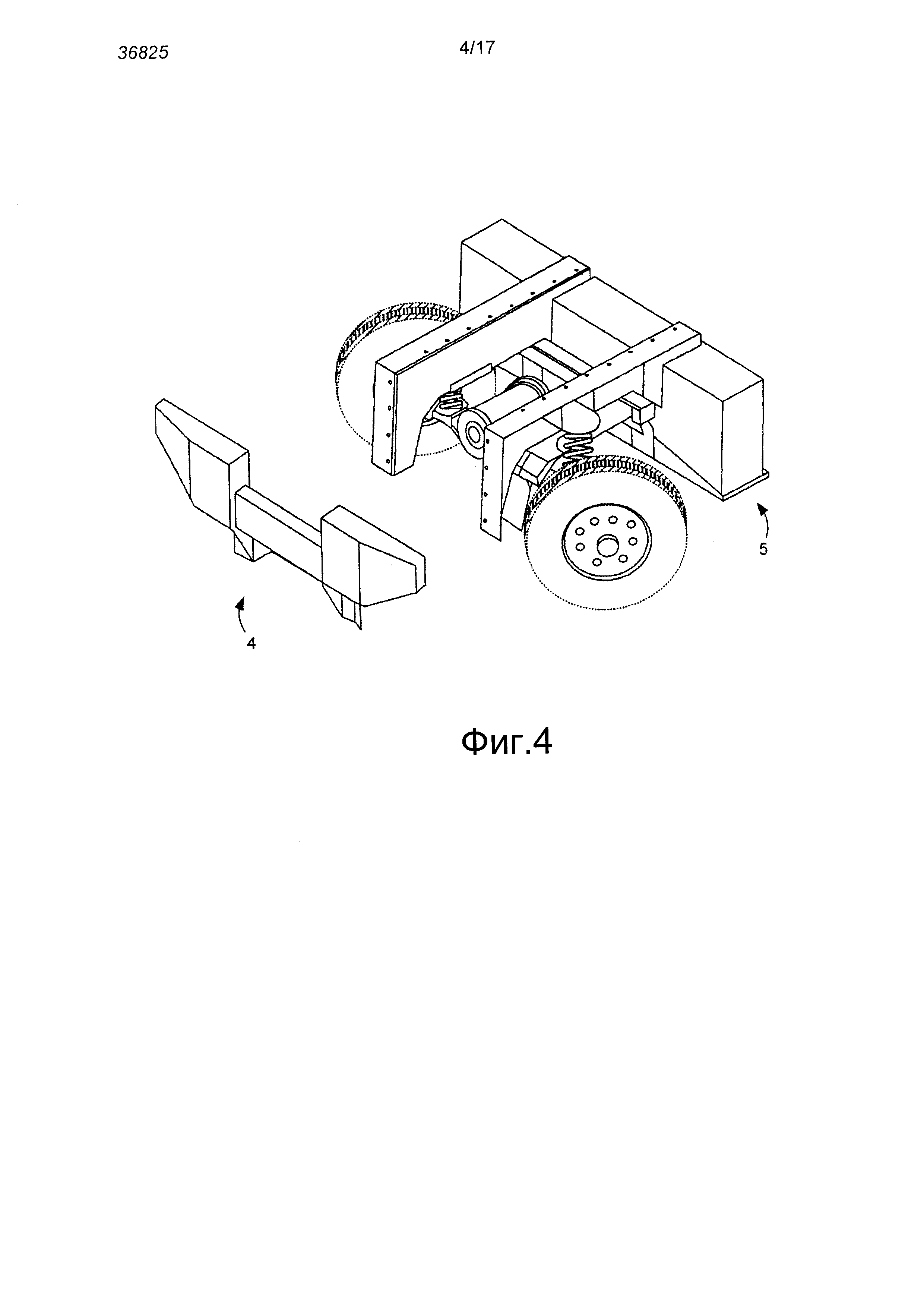
Фиг. 4 представляет собой вид в аксонометрии двух взаимозаменяемых сборочных модулей транспортного средства;
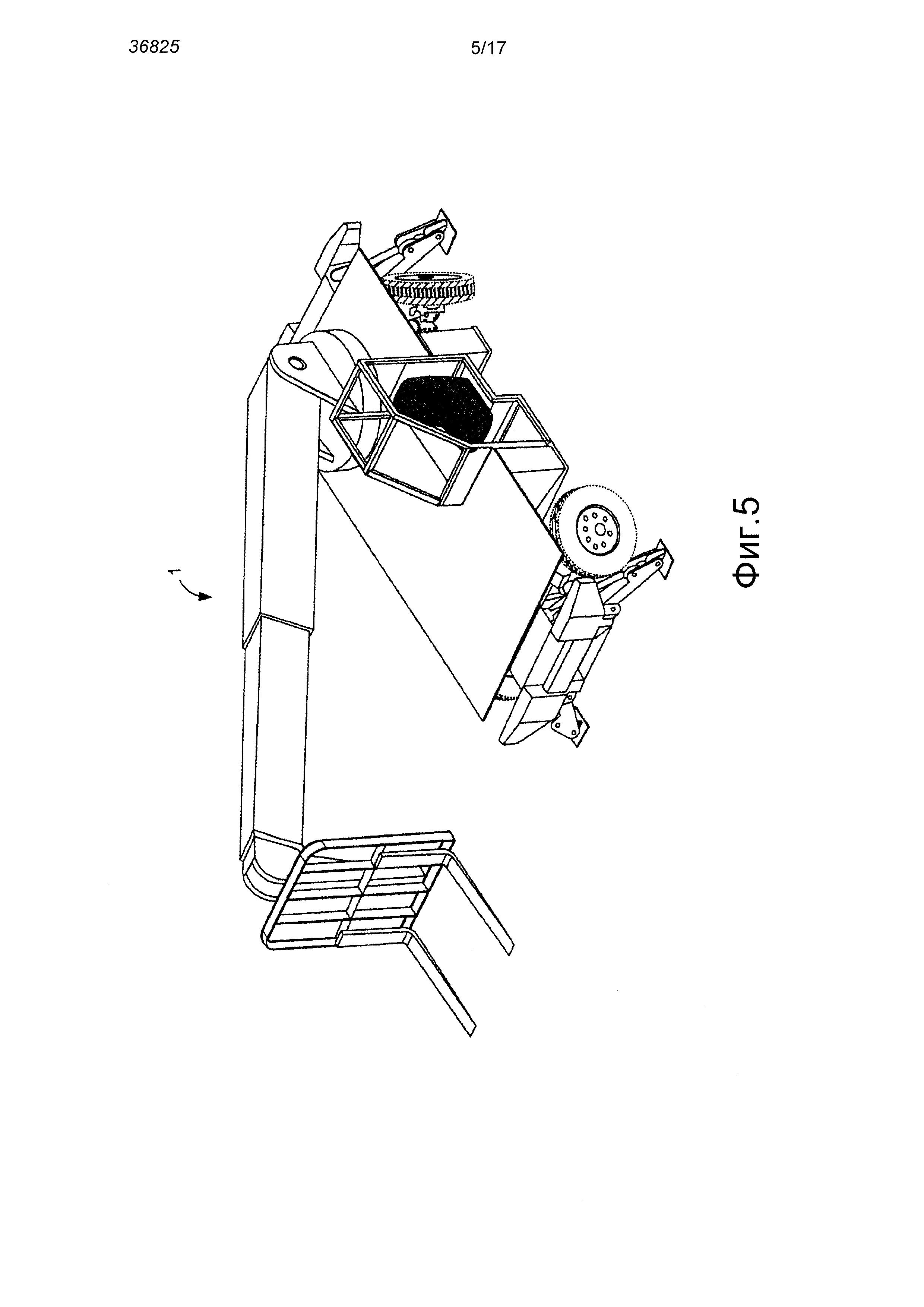
Фиг. 5 представляет собой вид в аксонометрии модульного электрического транспортного средства телескопического погрузчика согласно настоящему изобретению, с двумя питаемыми сборочными модулями поворота транспортного средства;
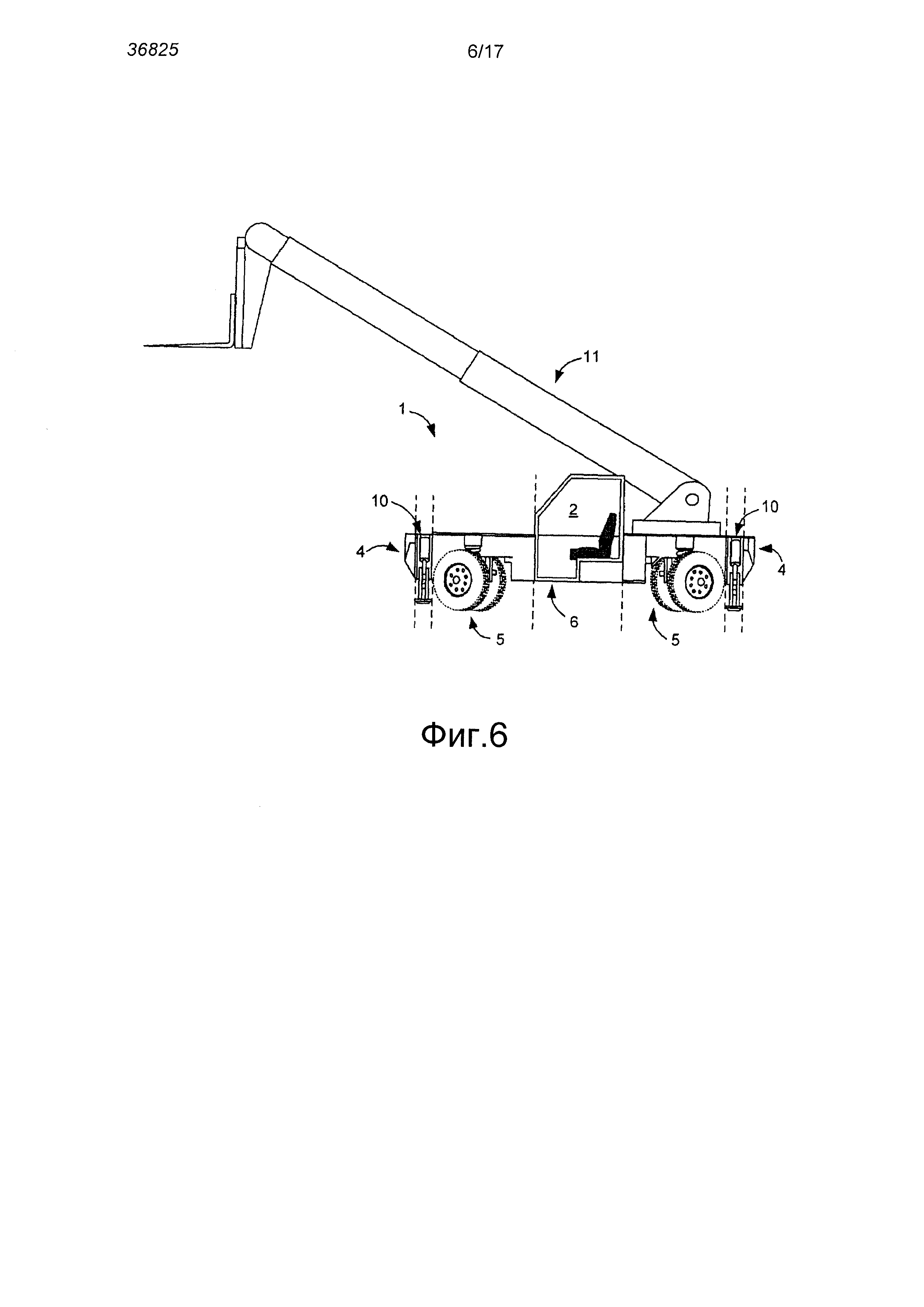
Фиг. 6 представляет собой вид сбоку варианта осуществления телескопического погрузчика по фиг. 5;
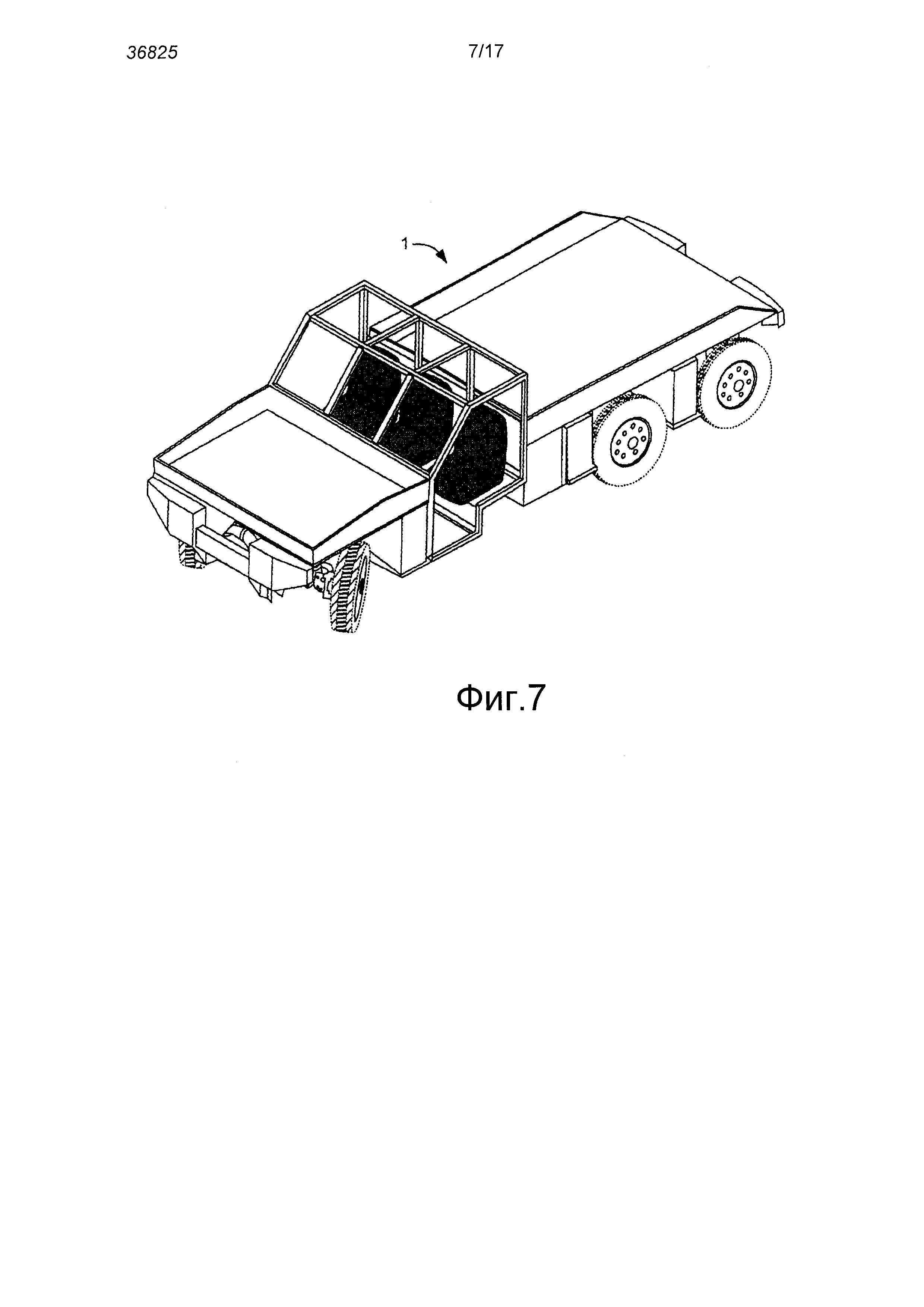
Фиг. 7 представляет собой вид в аксонометрии трехосного модульного электрического транспортного средства согласно настоящему изобретению, с одним питаемым сборочным модулем поворота транспортного средства;
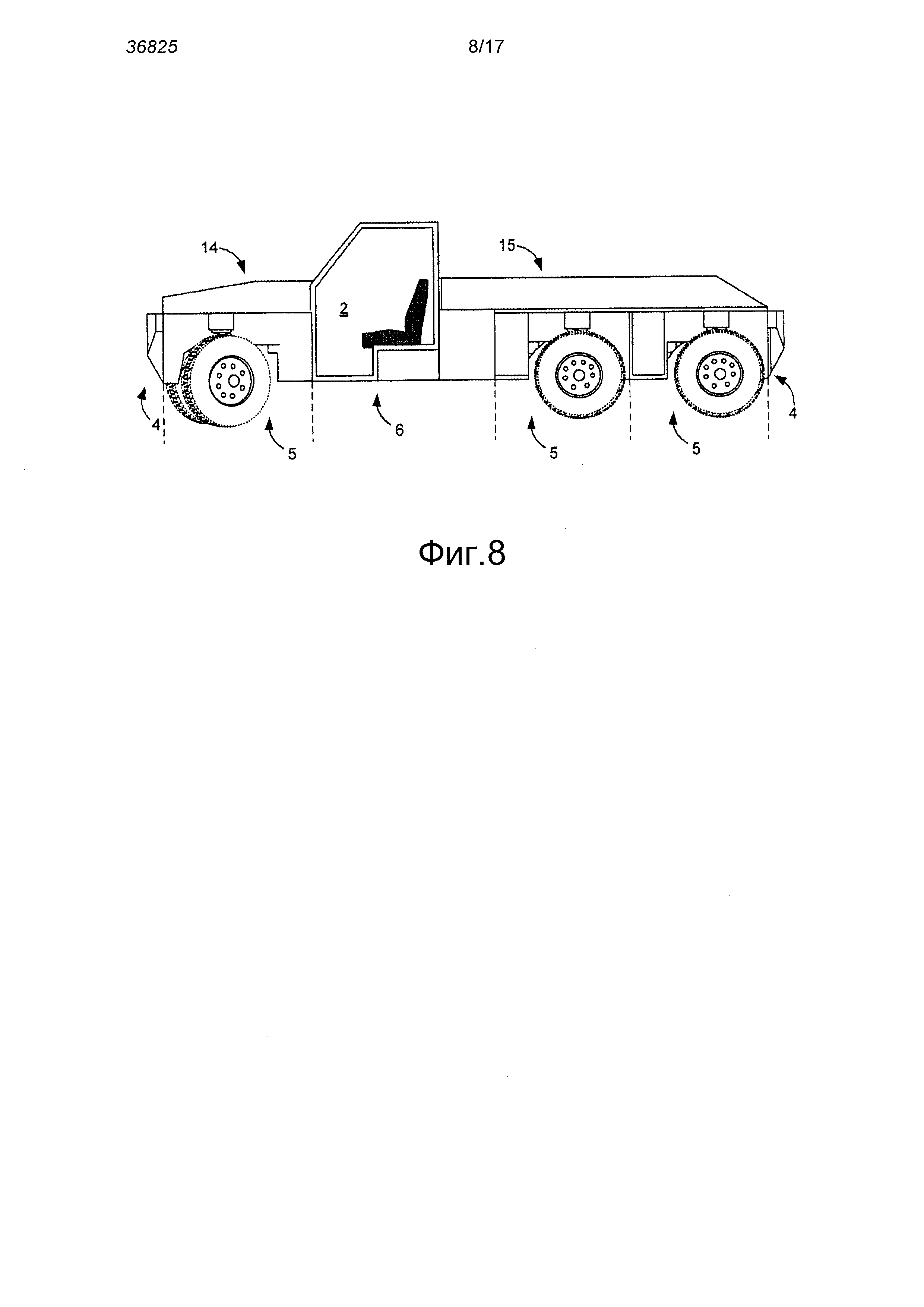
Фиг. 8 представляет собой вид сбоку варианта, показанного на фиг. 7;
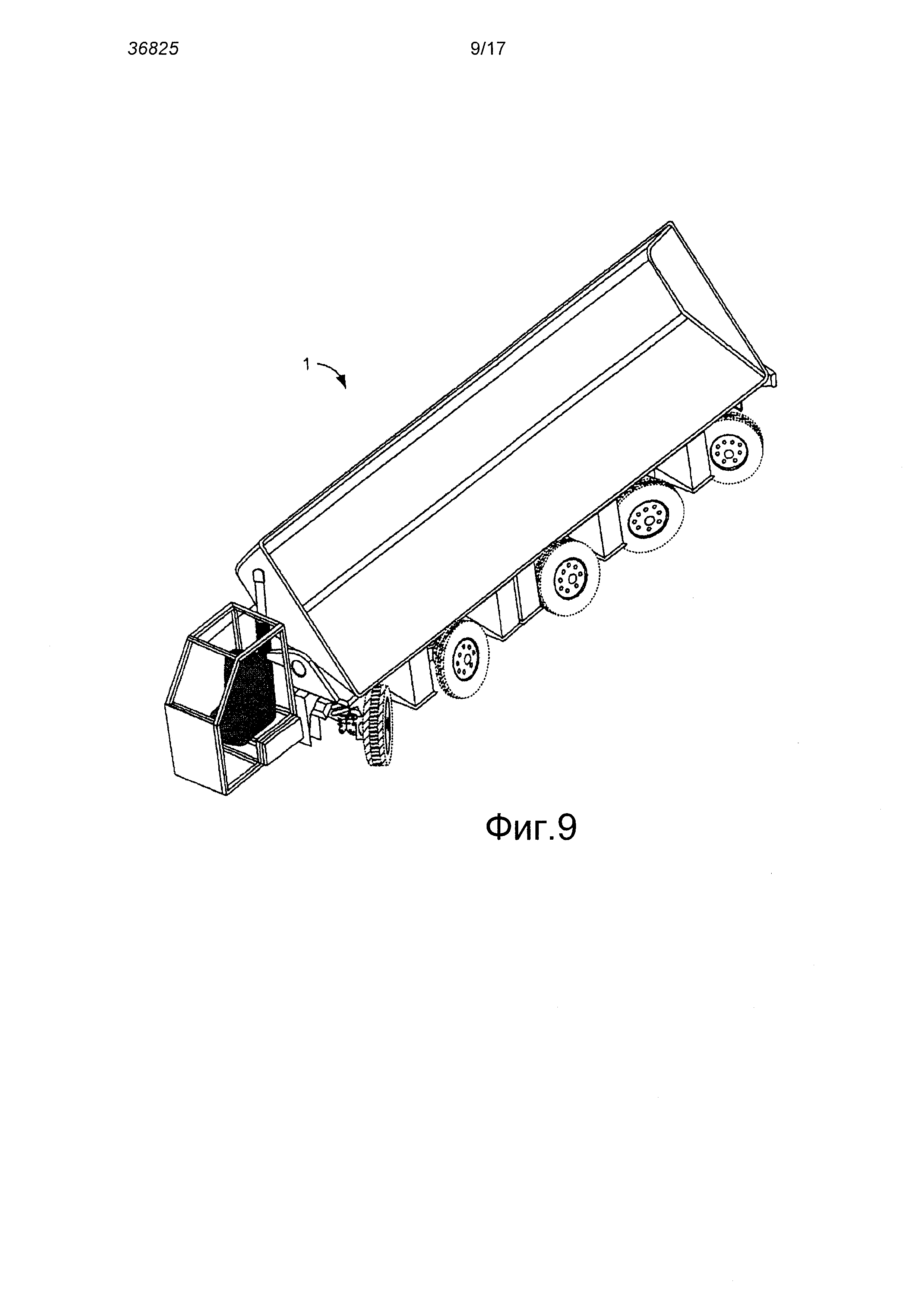
Фиг. 9 представляет собой вид в аксонометрии варианта осуществления пятиосного самосвала с боковым опрокидыванием кузова согласно настоящему изобретению с четырьмя питаемыми сборочными модулями поворота транспортного средства;
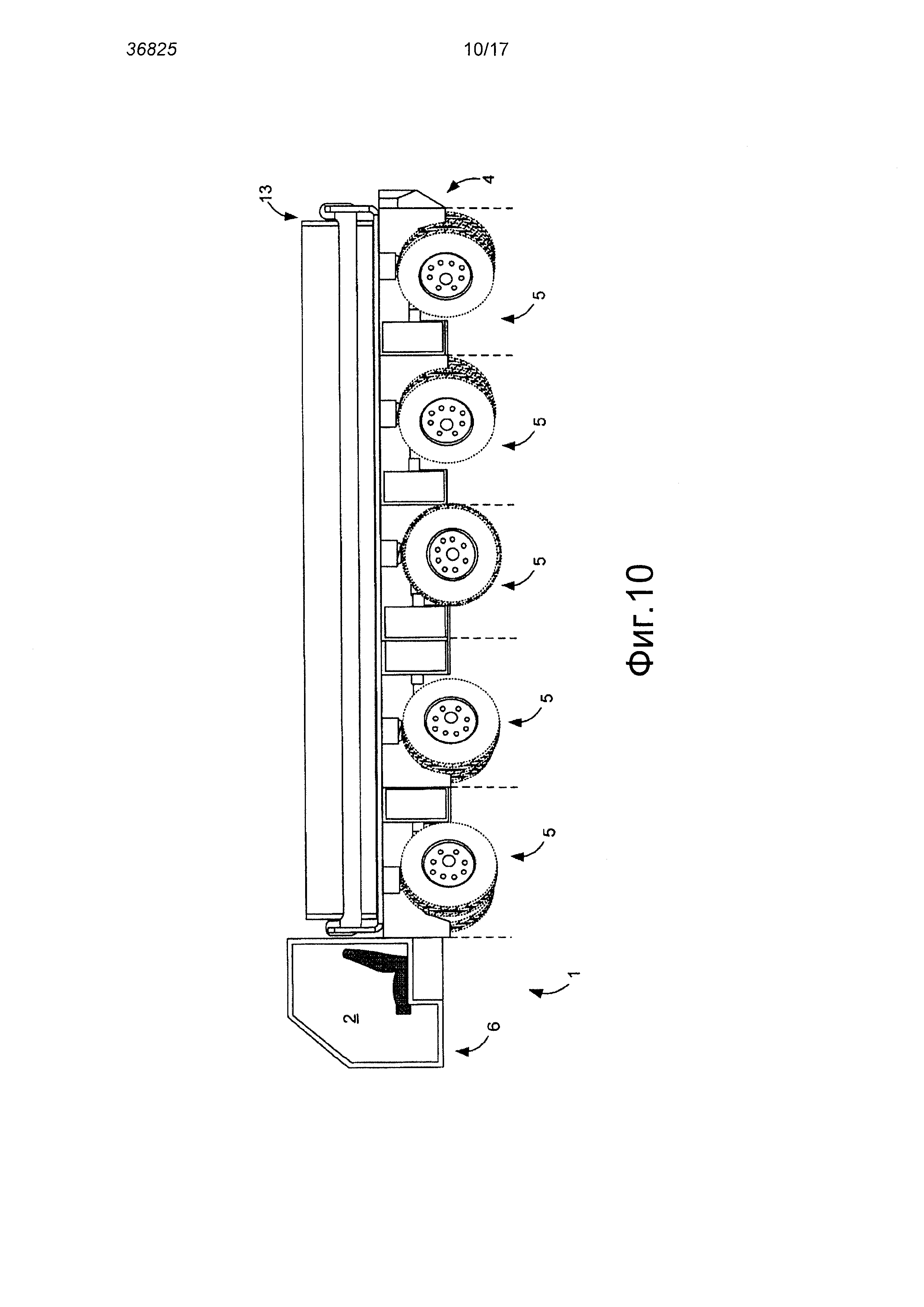
Фиг. 10 представляет собой вид сбоку варианта по фиг. 9;
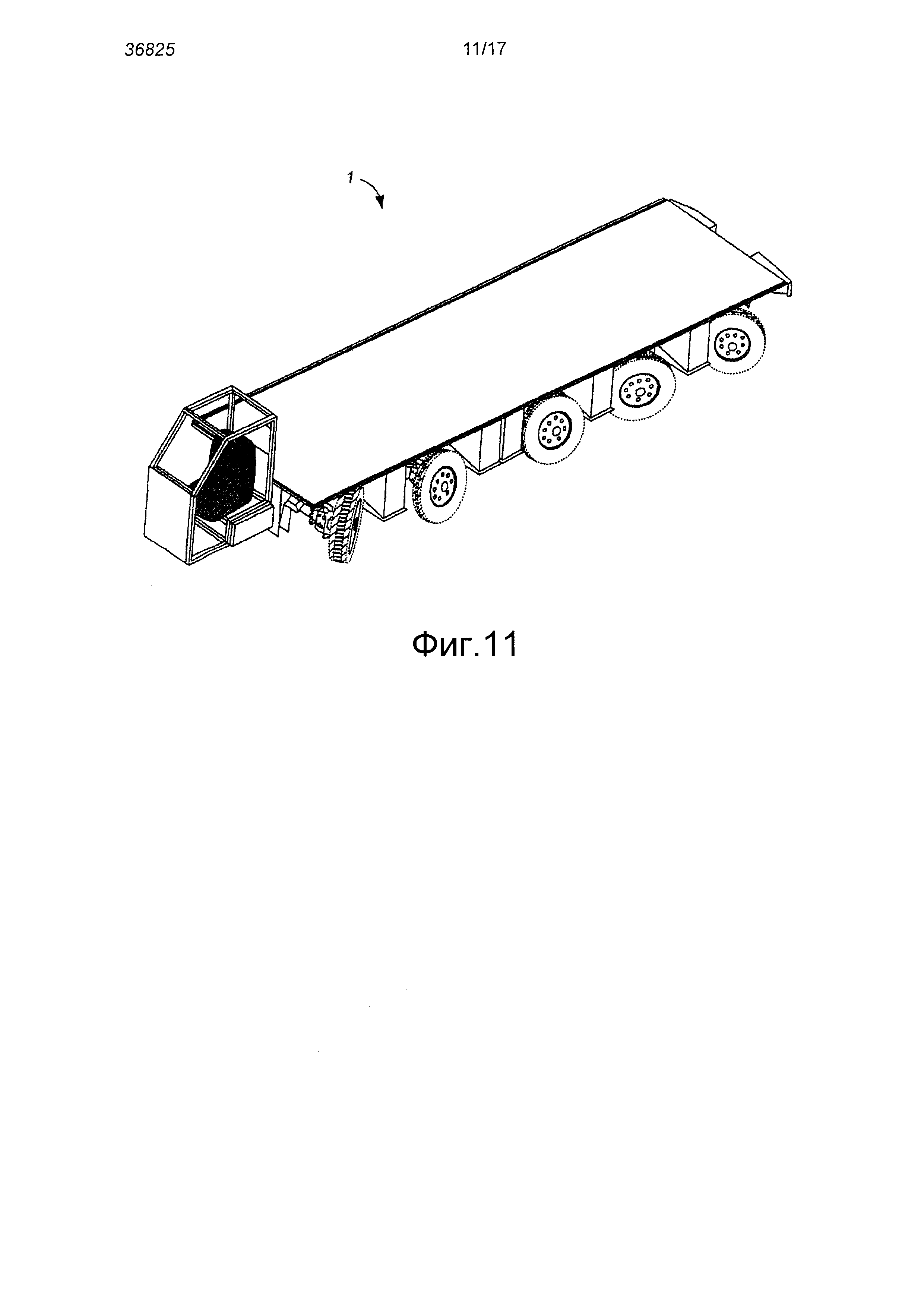
Фиг. 11 представляет собой вид в аксонометрии варианта осуществления пятиосного грузовика с плоской платформой модульного электрического транспортного средства согласно настоящему изобретению, с четырьмя питаемыми сборочными модулями поворота транспортного средства;
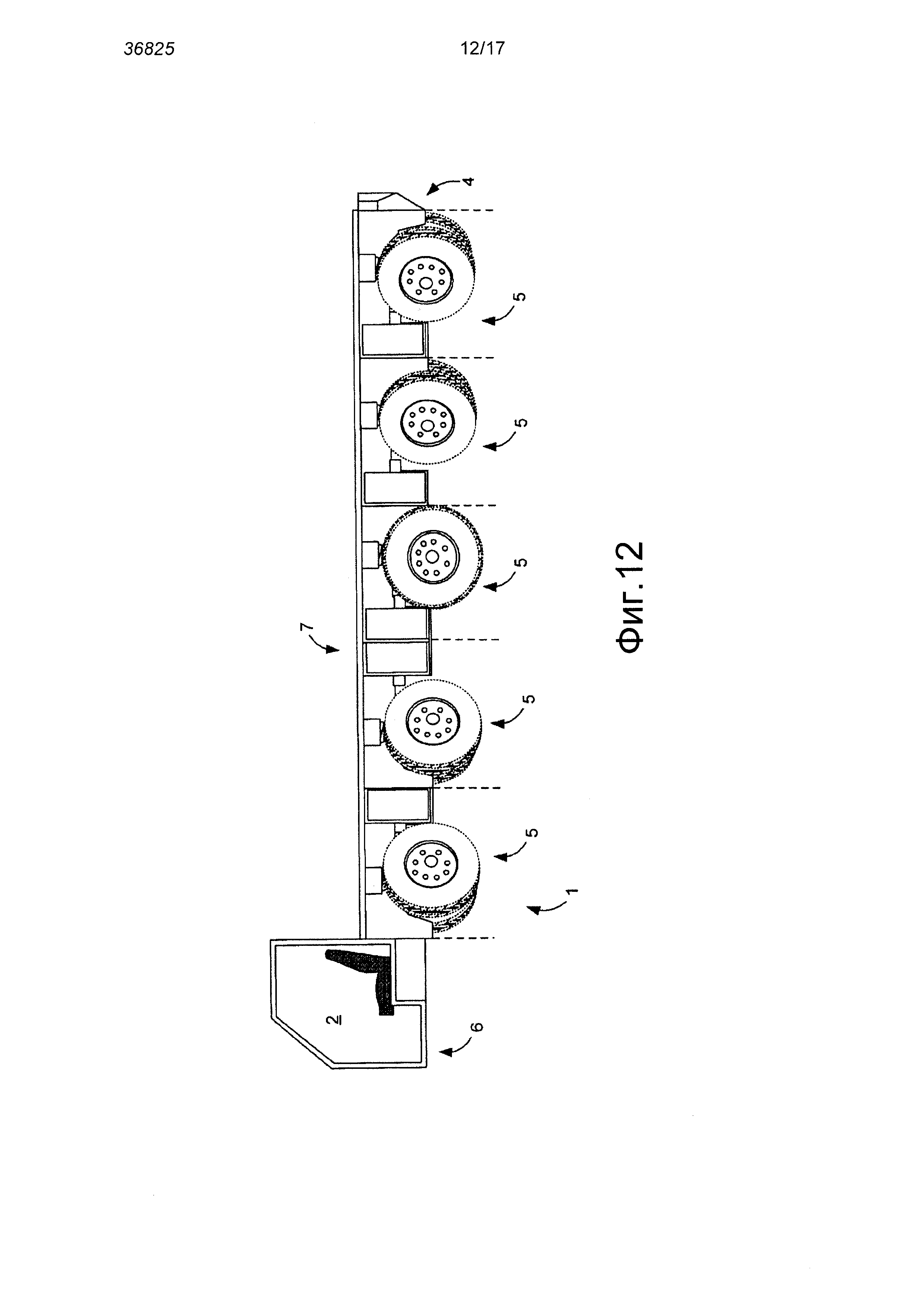
Фиг. 12 представляет собой вид сбоку варианта, показанного на фиг. 11;
Фиг. 13 представляет собой вид в аксонометрии четырехосного грузовика с плоской платформой варианта осуществления модульного электрического транспортного средства согласно настоящему изобретению, с двумя питаемыми сборочными модулями поворота транспортного средства;
Фиг. 14 представляет собой вид сбоку варианта осуществления по фиг. 13;
Фиг. 15 представляет собой вид в аксонометрии четырехосной автоцистерны в соответствии с конструкцией модульного электрического транспортного средства согласно настоящему изобретению, с двумя питаемыми сборочными модулями поворота транспортного средства;
Фиг. 16 представляет собой вид сбоку варианта по фиг. 15;
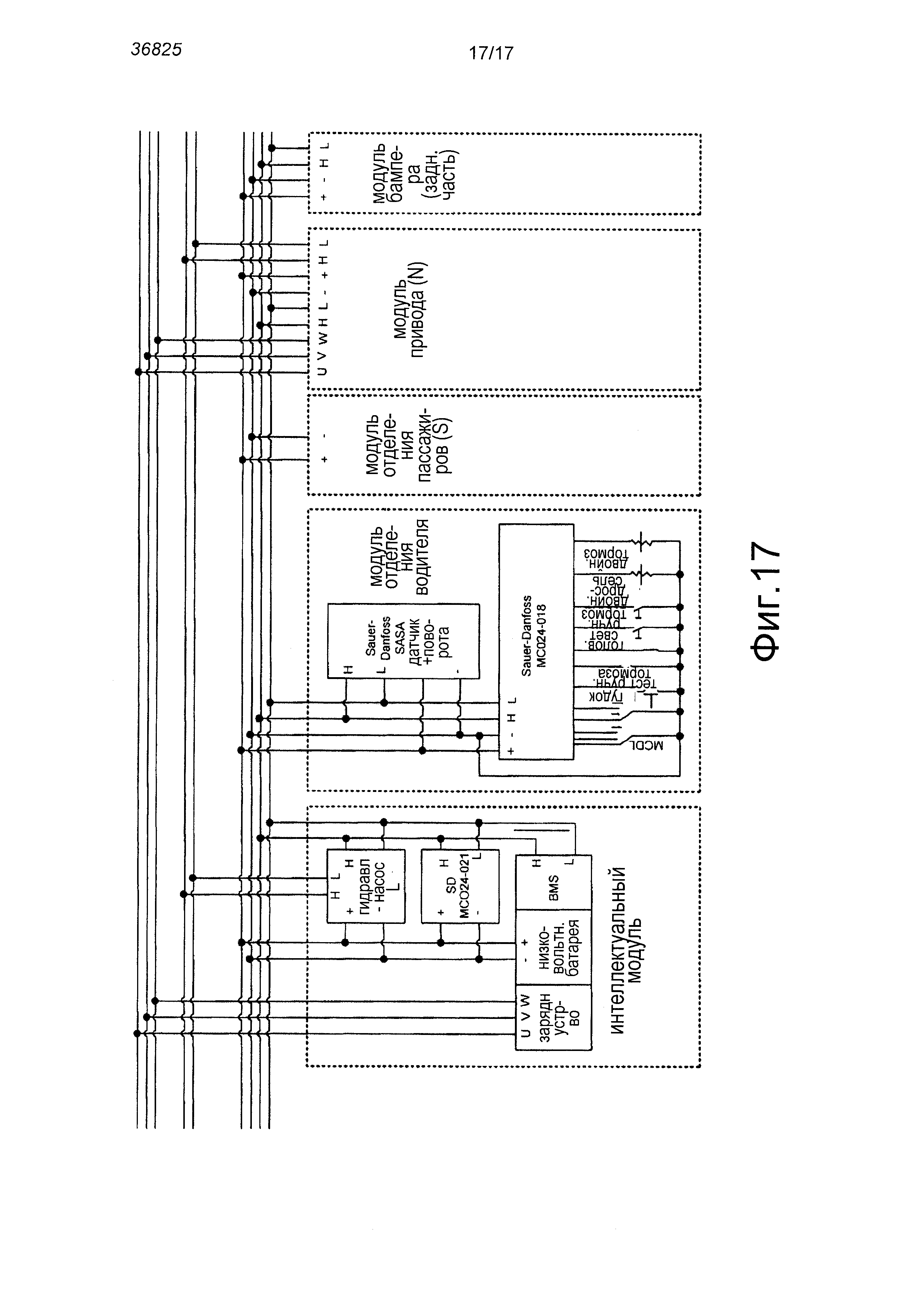
Фиг. 17 представляет собой типичный схематический вид проводки центральной шины сети на модульном электрическом транспортном средстве согласно настоящему изобретению.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Как указано выше, общая концепция настоящего изобретения представляет собой модульное электрическое транспортное средство, содержащее множество дискретных сборочных модулей транспортного средства. Комбинированная интегрированная система управления транспортного средства, содержащая сети контроллеров на модулях, соединенных центральной шиной сети, может распознавать модульную конфигурацию транспортного средства в целом и может обеспечивать оператору транспортного средства доступность соответствующей конфигурации управления для управления транспортным средством в его собранной модульной форме.
Требования к транспортным средствам.
Существует целый ряд основных концепций, предусмотренных в конструкции модульного электрического транспортного средства согласно настоящему изобретению. Необходимо получить систему, в которой либо на заводе, либо на месте модульное электрическое транспортное средство может быть собрано из множества взаимозаменяемых сборочных модулей транспортного средства.
При рассмотрении этого подхода по сравнению с существовавшему ранее типу транспортного средства, его можно рассматривать как разделение транспортного средства известного уровня техники на множество модулей, которые могут быть прикреплены вместе, чтобы обеспечить готовое транспортное средство, или с целью обеспечения возможности компактной сборки на месте и/или с целью обеспечения возможности конструкции транспортных средств различного типа, размеров и конфигураций со сведенной к минимуму площадью для производства. Например, можно обеспечить разработку тридцати различных конфигураций транспортных средств для продажи, используя только 6 или 8 различных сборочных модулей транспортного средства. Это позволит максимально увеличить гибкость производства и снизить расходы на производство с максимальным увеличением при этом количества типов транспортных средств, которые могут быть предложены клиентам для продажи.
Учитывая то, что основные применения для этих типов транспортных средств включают в себя промышленные сценарии, в которых либо готовый размер модулей может позволить сборку на месте различных или более габаритных транспортных средств по сравнению с прошлым временем, а также то, что во многих отраслях промышленности имеются проблемы, связанные с безопасностью при использовании двигателей внутреннего сгорания, электричество рассматривается в качестве первичной используемой энергосистемы. Способ модульного изготовления и сборки согласно настоящему изобретению может также использоваться с транспортными средствами, работающими на газе, или с другими транспортными средствами, приводимыми в действие внутренним сгоранием, но с более ограниченным эффектом.
Во многих промышленных применениях, которые могут включать в себя операции в труднодоступных или ограниченных рабочих зонах, радиус поворота транспортного средства также может являться проблемой. Компоненты для поворота и методика, необходимые для удовлетворения требованию компактных радиусов поворота - на самом деле при рассмотрении компактных радиусов поворота, предпочтительный подход поворота для многоосного транспортного средства, вероятно, может представлять собой подход поворота четырьмя колесами, в котором все колеса на транспортном средстве участвуют в повороте, а не просто ось поворота на одном конце транспортного средства.
Модульное электрическое транспортное средство
Как указано выше и обсуждается более подробно ниже, первый вариант осуществления настоящего изобретения представляет собой модульное электрическое транспортное средство, содержащее множество взаимозаменяемых сборочных модулей транспортного средства. Модульное электрическое транспортное средство собирается из множества дискретных взаимозаменяемых сборочных модулей транспортного средства. Модульное электрическое транспортное средство согласно настоящему изобретению имеет по меньшей мере две оси с грунтозацепными колесами, гусеницами или т.п. с целью вождения транспортного средства по рабочей поверхности. По меньшей мере одна из осей должна содержать колеса поворота или обеспечивать возможность поворота транспортного средства. При упоминании множества модулей имеется в виду по меньшей мере два или потенциально более двух. По меньшей мере два из взаимозаменяемых сборочных модулей транспортного средства, используемых в конструкции модульного электрического транспортного средства согласно настоящему изобретению, могут представлять собой модули, содержащие ось поворота. По меньшей мере один из модулей с осью поворота может быть модулем поворота, чтобы обеспечивать возможность поворота всего транспортного средства после сборки.
В действительности любое количество взаимозаменяемых сборочных модулей транспортного средства, большее одного, может использоваться для сборки готового транспортного средства в соответствии с остальной частью способа. Тип модулей, который может использоваться, также варьируется. Как обсуждается более подробно ниже, рассматривается использование питаемых модулей и непитаемых модулей, причем некоторые из питаемых модулей могут быть модулями поворота для обеспечения поворота собранного транспортного средства. Помимо этого, однако, окончательный вид сборочных модулей транспортного средства может также варьироваться с точки зрения их функциональности. Некоторые модули могут иметь свои собственные сиденья или кабины водителя, другие могут включать в себя грузовую платформу или пассажирскую зону, или даже быть очень специализированными, или может быть встроено специальное функциональное оборудование в модуль, который затем может быть собран в готовом транспортном средстве.
Для описания сборки основного модульного электрического транспортного средства ссылка сделана на фиг. 1-3, где показано основное модульное электрическое транспортное средство, собранное в соответствии со способом согласно настоящему изобретению. На чертежах показано модульное электрическое транспортное средство 1 согласно настоящему изобретению, которое в данном конкретном случае имеет законченную форму небольшого транспортного грузовика с кабиной 2 для сидения и небольшой транспортной платформой 3.
Как показано в виде сбоку на фиг. 3, можно видеть пять сборочных модулей транспортного средства, используемых в конструкции и сборке данного конкретного транспортного средства 1. От передней части транспортного средства 1 к задней части, как определено расположением спереди кабины водителя, показаны оконечный сборочный модуль 4 транспортного средства, который представляет собой сборку бампера, сборочный питаемый модуль 5 поворота транспортного средства, который в этом виде содержит часть передней оси транспортного средства 1, центральный модуль 6 кабины оператора, который является непитаемым сборочным модулем транспортного средства, с последующим вторым сборочным питаемым модулем 5 поворота транспортного средства, который является таким же, как модуль передней оси, но зеркально отраженным для противоположного соединения в сборке транспортного средства 1. Конечный сборочный модуль транспортного средства является второй оконечной сборкой 4 бампера.
Также может быть видна поверхность 7 платформы. Поверхность 7 платформы может быть либо частью модуля 6 кабины оператора, которая может откидываться на место поверх модуля 5 задней оси, или может представлять собой прикрепляемый вспомогательный модуль, который может быть присоединен к остальной части собранного транспортного средства 1.
Количество комбинаций различных модулей, которые могут быть собраны в соответствии с основным замыслом настоящего изобретения для получения различных комбинаций и различных готовых конфигураций транспортного средства, может быть очевидно специалистам в данной области техники, при этом все они включены в объем изобретения. Некоторые дополнительные комбинации собранного модульного транспортного средства показаны более подробно ниже.
Взаимозаменяемые сборочные модули транспортного средства
Модульное электрическое транспортное средство может быть собрано из комбинации питаемых или непитаемых модулей с соединяющими поверхностями модуля и сквозными соединениями шины, при этом различные модули можно легко взаимно заменять в их местоположении внутри транспортного средства путем их простого перемещения и повторного прикрепления. В идеальном случае система управления транспортного средства, присоединенная центральной шиной сети, может распознавать реконфигурацию модулей и регулировать систему управления соответственно или уведомить оператора, если была сделана неверная конфигурация. Например, со ссылкой на грузовик на фиг. 1-3, модуль 5 оператора может быть перемещен к передней части транспортного средства, при этом передний и задний питаемые сборочные модули транспортного средства 4 соединены вместе в непосредственной близости, чтобы обеспечить, например, различную поддержку груза под транспортной платформой или если просто необходимо разместить положение управления оператора на самой передней части транспортного средства. Реконфигурация или изменение сборки транспортного средства может быть снова выполнены либо на месте, или в месте производства, но, вообще говоря, простота этого типа способа сборки и его гибкость в отношении количества различных доступных конфигураций с фиксированным количеством сборочных модулей транспортного средства, имеющихся в наличии, могут быть видны и понятны.
Снова обратимся к грузовику на фиг. 1-3, взаимозаменяемость модулей и концепция соединяющей поверхности модуля также могут быть видны по отношению к двум питаемым сборочным модулям 4 транспортного средства - можно видеть, что передний питаемый сборочный модуль 5 транспортного средства и задний питаемый сборочный модуль 5 транспортного средства были зеркально отражены в их ориентации по отношению к остальной части транспортного средства таким образом, что оси находятся на дистальных концах транспортного средства. Из в остальном симметричной формы этих модулей можно видеть, что тот же самый модуль используется в обоих случаях и он просто переориентируется для сборки. Контроллер модуля в каждом из этих питаемых сборочных модулей транспортного средства может затем быть конфигурирован либо автоматически, либо с помощью оператора или интерфейса сборки для распознавания ориентации этих модулей 5 по отношению к остальной части транспортного средства 1 и отрегулировать управление соответствующим образом. Например, контроллер транспортного средства может затем распознать расположение осей на транспортном средстве по отношению к центру поворота для целей поворота и скорректировать соответствующим образом природу вводов и выводов управления для правильного и эффективного управления транспортным средством в собранном виде или вождения транспортного средства в собранном виде. Если другой питаемый сборочный модуль 5 транспортного средства с другой питаемой осью был добавлен к транспортному средству, то контроллер транспортного средства может снова либо автоматически, либо путем ввода оператора узнать о присутствии этой дополнительной оси и снова иметь необходимую программу на месте, чтобы либо распознать ее как соответствующую или подходящую конфигурацию управления и позволить ее управление соответствующим образом, либо альтернативно может оповестить сборку или оператора, что конфигурация транспортного средства в этом виде не является конфигурацией, которая была принята или программирована и что требуются изменения в конфигурации транспортного средства. Оповещение оператора об этих типах проблем конфигурации является тем, что, как предполагается, может иметь место в пределах объема настоящего изобретения, так как модульный характер этого электрического транспортного средства сам по себе поддается реконфигурации на месте в случае достижения альтернативных целей.
Имеется целый ряд различных базовых характеристик разных модулей для сборки электрических транспортных средств согласно настоящему изобретению, при этом необходимо суммировать те из них, которые нужны для поддержки остальной части этого описания.
Во-первых, каждый из рассматриваемых сборочных модулей транспортного средства имеет ось - которая в общем случае направлена вдоль направления движения готового собранного транспортного средства - для ссылочных целей. Два конца сборочного модуля транспортного средства соответствуют двум концам этой оси, причем каждый осевой конец каждого модуля образует поверхность модуля. Например, на фиг. 4 покомпонентно показаны два сборочных модуля транспортного средства собранного модульного электрического транспортного средства, показанного на фиг. 1-3, которые являются оконечным модулем 4 бампера и питаемым модулем 5 оси. Первое отличие между типами сборочных модулей транспортного средства системы согласно настоящему изобретению заключается в отличии между оконечными сборочными модулями транспортного средства и двумя готовыми сборочными модулями транспортного средства.
Оконечный сборочный модуль 4 транспортного средства, как показано на этом чертеже, может быть модулем, который имеет одну универсальную соединяющую поверхность модуля и осевой соединительный конец модуля, причем второй осевой конец предназначен как обращенный наружу или оконечный конец модуля - т.е. он не содержит универсальную соединяющую поверхность модуля на его втором конце, а предпочтительно на его втором содержит наружную поверхность для конца транспортного средства без каких-либо универсальных точек крепления, при этом различные шины внутри транспортного средства, (коммуникации, питание и т.д.) могут быть оконцованы в модуле, вместо обеспечения сквозных соединений на обоих концах модуля. Таким образом, при помощи оконечного сборочного модуля транспортного средства, такого как показанный модуль 4 бампера, может быть обеспечен конец готового собранного электрического транспортного средства с косметической и функциональной точки зрения, в настолько готовой мере, насколько требуемый «конец» может быть установлен на транспортном средстве, при этом различные сервисные шины внутри готового транспортного средства могут быть оконцованы в таком модуле - например, может потребоваться применить соответствующий вывод на осевом конце шины сети в собранном транспортном средстве, например, для того, чтобы транспортное средство функционировало должным образом. Таким образом, первое отличие между типами сборочных модулей транспортного средства, которые могут включать в себя готовое собранное электрическое транспортное средство в соответствии с настоящим изобретением, представляет собой оконечные, или с одним концом, сборочные модули транспортного средства, с точки зрения количества имеющихся соединяющих поверхностей модуля или концов, по сравнению двухсторонними сборочными модулями транспортного средства, которые могут обеспечивать необходимую универсальную соединяющую поверхность модуля и соединения шин на обоих осевых концах модуля для обеспечения возможности размещения модуля в любом месте в готовом собранном модульном электрическом транспортном средстве, а не просто на одном его конце.
Следует понимать, что некоторые варианты осуществления готового модульного электрического транспортного средства согласно настоящему изобретению и сборочные модули транспортного средства могут использовать только сборочные модули транспортного средства с двумя концами, чтобы свести к минимуму количество требуемых типов модулей. Может оказаться возможным, что либо универсальные точки крепления для прикрепления смежных сборочных модулей транспортного средства могут быть изготовлены так, чтобы не представлять собой угрозу безопасности или опасность полезности, если они оставлены отсоединенными от смежного модуля, при этом внутренние каналы или соединения шины для сервисных функций между модулями собранного электрического транспортного средства могут также быть необязательно оконцованными с использованием прикрепляемого или опционального оконечного элемента некоторого соответствующего типа - такой подход может устранить необходимость в оконечных сборочных модулях транспортного средства, хотя предполагается, что, например, использование бамперов на транспортном средстве и т.д. чаще всего может оказаться востребованным конечным потребителем и прикрепление базового оконечного сборочного модуля транспортного средства, такого как оконечный модуль бампера, может быть проще, чем изготовление большего оконечного модуля, такого как оконечный питаемый модуль. Либо такой подход предполагается в пределах объема настоящего изобретения - либо использование оконечных сборочных модулей транспортного средства для завершения или закрытия сборки модульного электрического транспортного средства в соответствии с оставшейся частью этой системы, либо при производстве и использовании взаимозаменяемых сборочных модулей транспортного средства, которые могут использоваться либо как оконечные, либо как модули с двумя концами.
Соединяющие поверхности модуля
Как указано выше, основной принцип сборки модульного электрического транспортного средства в соответствии со способом настоящего изобретения заключается в том, что различные сборочные модули транспортного средства, образованные для этой цели, либо питаемые, либо непитаемые, должны иметь на их осевых концах универсальные соединяющие поверхности модуля, которые позволяют взаимозаменяемое парное присоединение универсальной соединяющей поверхности модуля любого сборочного модуля транспортного средства, который изготовлен в соответствии с системой и способом настоящего изобретения, к другому смежному сборочному модулю транспортного средства. В случае оконечного сборочного модуля транспортного средства с обработанной поверхностью на одном конце, обращенной наружу от остальной части транспортного средства в направлении движения, либо на передней части задней части транспортного средства, может иметься только одна универсальная соединяющая поверхность модуля. В случае сборочного модуля транспортного средства с двумя концами, который может использоваться в любом месте внутри сборки модульного электрического транспортного средства согласно настоящему изобретению, оба из двух осевых концов модуля, перпендикулярные направлению движения транспортного средства, могут иметь соединяющие поверхности модуля на них. Универсальная соединяющая поверхность модуля или универсальное крепежное оборудование и общая методика, которая разработана для использования в соответствии со способом согласно настоящему изобретению, могут в идеальном случае включать в себя не только смежное соединение передней части одного модуля к задней части другого модуля, но также могут содержать должным образом зеркально отраженные точки крепления или оборудование, которые могут обеспечить присоединение модуля от любого его конца к любому концу смежного модуля - например, передней части к передней части или задней части к задней части. В примере модульного электрического грузовика, показанного на фиг 1-3, питаемые сборочные модули 5 транспортного средства фактически, как можно видеть, перевернуты вокруг и соединены таким образом - оба эти питаемые сборочные модули 5 транспортного средства являются теми же самыми модулями, просто присоединенными к остальной части транспортного средства в противоположном направлении, обращенном к направлению движения транспортного средства.
В дополнение к тому факту, что оборудование или блокировочный механизм, имеющийся на каждой универсальной соединяющей поверхности модуля, в идеальном случае может обеспечивать соединение любого конца смежного сборочного модуля транспортного средства с двумя концами, соединительный механизм или оборудование должны быть достаточно жесткими или прочными, чтобы обеспечивать функциональность транспортного средства особенно для промышленных транспортных средств, предназначенных для перевозки грузов или т.п. Зажимные или блокировочные механизмы множества различных типов, которые могут решить эту задачу обеспечения зеркально отраженных точек крепления, представляют собой механизмы для аспекта возможности взаимозаменяемости соединения, наряду с обеспечением достаточной прочности для перевозящего грузы транспортного средства или т.п., могут быть понятны специалистам в данной области техники, связанной с каркасом транспортного средства и конструктивным дизайном, при этом предполагается, что в объем настоящего изобретения включены зажимной механизм или механизм оборудования любого типа, которые могут выполнить задачи требований, связанных с зеркально отраженными и универсальными соединяющими поверхностями модуля, наряду с обеспечением достаточной прочности для транспортных средств этих типов, которые могут быть изготовлены или собраны с использованием этих модулей.
Другой аспект, относящийся к специфике разрабатываемых соединений оборудования, в идеальном случае представляет собой тот аспект, что они обеспечивают возможность быстрого и относительно простого присоединения модулей друг к другу вместо необходимости в значительном количестве времени для сборки и более конкретных и специальных инструментах или т.п. Соединения центральной шины питания и соединения центральной шины сети между смежными модулями могут на самом деле также образовывать часть крепежного оборудования на соединяющих поверхностях модуля между модулями.
Сравнение оконечных и двунаправленных сборочных модулей транспортного средства
Сборочные модули транспортного средства как не питаемые, так и питаемые по природе, также могут быть оконечными или с двумя концами. Оконечный сборочный модуль транспортного средства по существу может быть выполнен с возможностью присоединения только на одном конце к смежному сборочному модулю транспортного средства - так, что он может, например, быть установлен на конце транспортного средства и может содержать бампер или т.п. Оконечный сборочный модуль транспортного средства с двумя концами может иметь конструктивные точки крепления, а также сквозные соединения шины, на каждом конце модуля, которые являются соединительными концами, так что сборочный модуль транспортного средства с двумя концами может быть присоединен на каждом из своих концов к смежному сборочному модулю транспортного средства либо к оконечному модулю, либо к самому модулю с двумя концами, и являться питаемым или непитаемым по природе.
В частности предусматривается, что может быть изготовлен оконечный сборочный модуль транспортного средства, который может быть довольно небольшим по размеру и может на самом деле просто обеспечивать оконечное крепление для использования со сборочным модулем транспортного средства с двумя концами в соответствии с остальной частью системы так, что, например, он может эффективно содержать или бампера, или подобный элемент, который может быть прикреплен к концу уже собранного модульного электрического транспортного средства в соответствии с остальной частью настоящего изобретения. Оконечные сборочные модули транспортного средства этих типов могут обеспечить максимальную гибкость в конфигурации и сборке модульных транспортных средств в соответствии с системой и способом согласно настоящему изобретению.
Каждый сборочный модуль транспортного средства может иметь приблизительно на том же самом универсальном положении на его каждом соединительном конце необходимые соединения для обеспечения сквозных соединений этих разных шин или коммуникаций через готовое собранное модульное электрическое транспортное средство.
Питаемые сборочные модули транспортного средства
Следующим отличием в типах сборочных модулей транспортного средства, которые могут быть разработаны или использованы в соответствии с остальной частью способа сборки и методики настоящего изобретения, является отличие между питаемыми сборочными модулями транспортного средства и непитаемыми сборочными модулями транспортного средства. Предполагается, что питаемый сборочный модуль транспортного средства является сборочным модулем транспортного средства, который содержит питаемое оборудование транспортного средства для использования при движении или вождении готового собранного модульного электрического транспортного средства. Он может содержать либо по меньшей мере одну сквозную ось с колесами или другими вспомогательными средствами передвижения, такими как гусеницы и т.п. на ее концах, либо, альтернативно, питаемые колеса, установленные по любом боковом крае модуля, причем колеса установлены в режиме индивидуального питания и ориентированы в направление движения готового транспортного средства. В питаемом сборочном модуле транспортного средства со сквозной осью может иметься один электрический двигатель и компоненты передачи питания для привода ось и колес, при этом, в отличие от этого, в питаемом сборочном модуле транспортного средства с независимо установленными колесами предполагается, что каждое колесо может быть присоединено к его собственному электрическому двигателю, причем все двигатели на модуле присоединены к центральной шине питания и сети модуля и транспортного средства. Предполагается, что любой подход находится в пределах объема настоящего изобретения.
При упоминании осей, которые поддерживают или зацепляются с зацепляющимися с поверхностью колесами или гусеницами на питаемом сборочном модуле транспортного средства, следует понимать, что концепция осей в этих модулях не только предполагает прямую сквозную унитарную ось, как можно было бы понимать в общепринятом смысле этого слова. Оси на питаемых сборочных модулях транспортного средства могут также включать в себя ось крепления и систему поворота и питания для отдельных колес на модуле (при этом на самом деле это может, скорее всего, быть реализацией питаемых сборочных модулей транспортного средства) - а не прямую сквозную ось с одним преобразователем питания от электрического двигателя (которая может быть предпочтительной в некоторых случаях при изготовлении питаемого сборочного модуля транспортного средства без поворота), при этом отдельные колеса на питаемых сборочных модулях транспортного средства могут отдельно питаться дискретными электрическими двигателями в других случаях, в том числе в модулях поворота - предполагается, что любой такой подход к осям включен в объем настоящего изобретения.
Предполагается, что каждый питаемый сборочный модуль транспортного средства является автономным с точки зрения питания постольку, поскольку каждый питаемый сборочный модуль транспортного средства содержит его собственное питание привода, а также его собственную систему электрической зарядки и зарядки и хранения питания. Путем обеспечения автономных систем питания на каждом питаемом сборочном модуле транспортного средства сборка транспортного средства с множеством питаемых сборочных модулей транспортного средства может обеспечить в результате включение множества бортовых систем привода и питания - доступность большего количества питания при сохранении на транспортном средстве, когда количество осей и колес с приводом или других требований к питанию возрастает, является желательным.
Каждый питаемый сборочный модуль транспортного средства может содержать по меньшей мере одну ось с интегрированным приводом и питанием, а также систему хранения электрического питания или батарей, наряду с контроллером модуля для управления вождением и поворотом по меньшей мере одной оси поворота. Использование стандартизированных точек крепления между различными модулями наряду с центральной шиной сети, которая обеспечивала бы коммуникацию между контроллерами модуля каждого модуля, может обеспечить возможность гибкой сборки различных электрических транспортных средств различных конфигураций с использованием оборудования стандартных модулей.
Хотя предполагается, что лучшая реализация питаемых сборочных модулей транспортного средства согласно настоящему изобретению может содержать систему зарядки и хранения питания на каждом питаемом сборочном модуле транспортного средства так, чтобы необходимые батареи и хранимое питание могли быть доступны на модуле на основе модуля для удовлетворения потребностей в питании привода или других компонентов, прикрепленных к нему, следует также понимать, что в некоторых вариантах осуществления, хотя система привода или компоненты привода могут содержаться в каждом питаемом сборочном модуле транспортного средства, может существовать необходимость в некоторых случаях использовать единую систему зарядки и хранения питания или батарей на транспортном средстве или менее одной системы зарядки для каждого питаемого сборочного модуля транспортного средства, и просто присоединить электрические компоненты привода каждого питаемого сборочного модуля транспортного средства к этой центральной системе батарей посредством центральной шины питания на транспортном средстве.
Также интегрировано с каждым питаемым сборочным модулем транспортного средства может использоваться контроллер модуля, функционально присоединенный к оборудованию питания и привода на этом модуле, а также к контроллерам на других модулях и к остальной части транспортного средства через центральную шину сети. Контроллер может генерировать необходимые управляющие выводы на двигатели или оборудование привода на модуле, когда через центральную шину сети было запрошено общее управление транспортного средства или движения транспортного средства конкретным способом. Путем размещения интегрированного контроллера на каждом модуле привода упрощаются сборка и управление готового транспортного средства. Контроллеры на каждом модуле привода могут обнаруживать наличие других сходных контроллеров на сети коммуникаций транспортного средства, а также при помощи правильной конфигурации сети распознавать их относительное положение по отношению к остальной части транспортного средства таким образом, что, при помощи соответствующего программного обеспечения, хранящегося в памяти контроллера или контроллеров, общее управление приводом транспортного средства автоматически может быть изменено или скорректировано на ходу, чтобы соответствовать конфигурации модулей вместе в транспортном средстве. Один из контроллеров на одном из модулей привода может стать ведущим, при этом остальные будут подчинены этому контроллеру с точки зрения задачи или целей общего интерфейса управления транспортного средства или альтернативно каждый из контроллеров на модулях привода может быть подчинен одному добавленному контроллеру транспортного средства, который может просто подключаться по модульному принципу в центральную шину коммуникаций и питания транспортного средства где-либо на нем. Предполагается, что любой такой подход к контроллеру сети также находится в пределах объема изобретения и будет описан более подробно в отношении добавления функциональности блока в другом месте ниже.
Сборочные модули поворота транспортного средства
Дополнительное отличие типов питаемых сборочных модулей транспортного средства, которые могут использоваться на модульных транспортных средствах в соответствии с остальной частью настоящего изобретения, может представлять собой или питаемые сборочные модули транспортного средства с обеспечением поворота или без обеспечения поворота. Питаемый сборочный модуль поворота транспортного средства может быть модулем, который может использоваться, по отдельности или в сочетании с другими, для обеспечения поворота готового собранного модульного электрического транспортного средства, когда оно едет по поверхности. Это может быть случаем, когда только одна ось транспортного средства, и, таким образом, один питаемый сборочный модуль транспортного средства должен быть выполнен с возможностью поворота, или это может быть случай, когда ось и оборудование привода на более чем одном питаемом сборочном модуле транспортного средства выполнены с возможностью поворота для обеспечения, например, большей маневренности и т.п. Например, со ссылкой на связанный с грузовиком вариант осуществления электрического транспортного средства согласно настоящему изобретению, показанный на фиг. 1-3, можно видеть, что колеса на каждом из двух питаемых сборочных модулей транспортного средства на этом транспортном средстве выполнены с возможностью поворота, что может обеспечить максимально возможную маневренность. Поскольку колеса каждого из этих двух питаемых сборочных модулей транспортного средства могут поворачиваться независимо, контроллеры на каждом из этих питаемых сборочных модулей транспортного средства могут управлять поворотом транспортного средства, а также его питание привода и, после приема указания поворота от средств управления транспортного средства, могут инициировать необходимое управление поворотом на оборудовании питания на каждом из этих питаемых сборочных модулей транспортного средства для достижения желаемого эффекта поворота транспортного средства. Если питаемые сборочные модули транспортного средства используют гусеницы вместо шин, что не является вероятным, но возможным, как описано в другом месте в данном документе, то может быть выполнена необходимая регулировка управления поворотом модуля с использованием способов, известных специалистам в данной области техники, связанной с изготовлением гусеничных машин. В любом случае предполагается, что могут использоваться питаемые сборочные модули транспортного средства как с поворотом, так и без поворота при сборке модульного электрического транспортного средства согласно настоящему изобретению в зависимости от требуемой функциональности полностью собранного транспортного средства. (Как также указано в нижеследующем, допускается, что колесный модуль, который не имеет систему питания на нем, так что он может эффективно содержать ведомую или поддерживающую, но не ведущую ось на транспортном средстве, может также образовывать часть конструкции транспортного средства).
Непитаемые сборочные модули транспортного средства
Последний тип взаимозаменяемого сборочного модуля транспортного средства, который рассматривается в этом списке и который может быть использован для сборки готовых модульных электрических транспортных средств согласно настоящему изобретению, представляет собой непитаемые модули. Предполагается, что непитаемые модули представляют собой любой модуль, либо оконечный, либо с двумя концами, который не содержит электрический привод и систему питания, присоединенные к оси или колесам, сцепляющимися с поверхностью рабочей зоны. Со ссылкой на грузовик на фиг. 1-3, показанные непитаемые модули являются сборками оконечного бампера и центральным модулем оператора. Другой тип предполагаемого непитаемого модуля представляет собой непитаемый модуль с осью или колесами, сцепляющимися поверхностью, который может быть выполнен с возможность поворота или иначе.
Следует понимать, что общая концепция непитаемого модуля, представляющего собой любой модуль, который может использоваться в сборке модульного электрического транспортного средства согласно настоящему изобретению, посредством содержания, либо в оконечной форме одной, либо в форме с двумя концами двух соединяющих поверхностей модуля и сквозных соединений шины, которые могут соединяться со смежными сборочными модулями транспортного средства, либо питаемыми, либо непитаемыми, рассматривается как находящаяся в пределах объема настоящего изобретения. Питаемые и непитаемые модули могут, после сборки, в основном образовывать корпус или конструкцию готового транспортного средства, при этом дополнительные модули или компоненты также могут быть прикреплены к верхней поверхности этих модулей, чтобы обеспечивать даже большую гибкость. Например, в случае грузовика, показанного на фиг. 1-3, дополнительные компоненты могут быть прикреплены к верхней части транспортной платформы 7, например, чтобы обеспечить дополнительную гибкость сборки транспортного средства и дополнительно увеличить количество готовых доступных конфигураций.
Существует множество различных типов непитаемых сборочных модулей транспортного средства, которые могут рассматриваться для сборки в готовое транспортное средство в соответствии со способом настоящего изобретения. Из общей перспективы непитаемого сборочного модуля транспортного средства предполагается, что модуль, который имеет каркас или узел конструкции и другие компоненты, соответствующие питаемым сборочным модулям транспортного средства, которые могут использоваться в сборке транспортного средства, так что непитаемый сборочный модуль транспортного средства может быть присоединен на его двух осевых концах к двум смежным сборочным модулям транспортного средства, которые могут быть питаемыми или непитаемыми модулями. Непитаемые сборочные модули транспортного средства, скорее всего, могут иметь либо функцию оператора, либо транспортное назначение - например, модуль может содержать кабину оператора, имеющую зону для сидения оператора транспортного средства, наряду со средствами управления для работы транспортного средства, которые могут взаимодействовать с остальной частью средств управления на собранном транспортном средстве через центральную шину сети. Также допускается, что непитаемый сборочный модуль транспортного средства может содержать множество сидений для создания транспортного средства для перевозки людей или транспортную платформу, или контейнер, или т.п. Предполагается, что любой тип сборочного модуля транспортного средства, который не содержит систему питания, как предполагается в случае с вышеописанными питаемыми сборочными модулями транспортного средства, находится в пределах объема непитаемых модулей и все они могут находиться в пределах объема предложенного данного изобретения. Хотя предполагается, что в условиях большинства промышленных применений было бы желательно, что все несущие ось модули являются питаемыми сборочными модулями транспортного средства с интегрированными системами питания, следует также понимать, что также может быть изготовлен несущий ось непитаемый сборочный модуль. В этом случае, либо со сквозной осью, либо с отдельными колесами поворота, сборочный модуль транспортного средства может быть изготовлен в соответствии с остальной частью настоящего изобретения и может, наряду со способом без питания, обеспечивать опору на грунт и колеса для собранного модульного электрического транспортного средства.
Центральная шина питания
Как указано в этом документе, центральная шина питания, проходящая через все модули в собранном транспортном средстве, может оказаться полезной с точки зрения разделения питания между модулями, поскольку один модуль может потребовать больше питания. Центральная шина питания также может использоваться с точки зрения обеспечения подзарядки электрических батарей в множестве модулей транспортного средства посредством присоединения зарядного устройства к одной точке на центральной шине питания и использования его в целях зарядки. Преимущества центральной шины питания через все транспортное средство должно быть понятно специалистам в данной области техники, связанной с электрическим питанием и конструкцией электрической цепи.
Любой тип кабельного соединителя или т.п., который может использоваться для соединения центральной шины питания между смежными модулями после соединения модулей, рассматривается для целей соединения двух смежных модулей и центральной шины питания. Как указано более подробно ниже, использование шпоночных кабельных соединений может быть особенно предпочтительным с точки зрения обеспечения быстрого крепления шины питания между смежными модулями. Любое внешнее устройство или компонент на любом модуле, которому может потребоваться питание, может быть присоединен к центральной шине - например контроллер модуля может быть присоединен к центральной шине питания либо для управления различными аспектами процесса распределения питания, либо просто потому, что сам контроллер требует питания. Лампы или другие вспомогательные элементы на модуле могут быть присоединены к центральной шине питания, а также может или должен быть присоединен контроллер транспортного средства, который отвечает за общий контроль транспортного средства путем распределения управляющих сигналов на все контроллеры модуля на центральной управляющей шине сети.
Один или более модулей в собранном транспортном средстве также может содержать порты распределения питания, от которых к центральной шине питания могут быть присоединены вспомогательные элементы или внешние устройства с целью подачи питания также на них.
Центральная шина сети
В дополнение к необходимости разработки и реализации соединяющих поверхностей модуля и устройств крепления на концах крепления каждого сборочного модуля транспортного средства, либо на обоих концах на противоположных концах направления движения транспортного средства на сборочном модуле транспортного средства с двумя концами, либо на одном конце, перпендикулярном оси или направлению движения транспортного средства на оконечном сборочном модуле транспортного средства, может существовать необходимость в центральной сети управления и шине для физического прохождения через каждый сборочный модуль транспортного средства, а также для обеспечения некоторых типов универсального соединения на каждой универсальной соединяющей поверхности модуля каждого сборочного модуля транспортного средства.
Как указано выше и как следует, в частности, понимать по отношению к питаемым сборочным модулям транспортного средства транспортного средства, которые содержат приводные двигатели и систему зарядки и хранения питания, каждый питаемый сборочный модуль транспортного средства может иметь его компоненты привода и компоненты питания, присоединены к центральной шине сети. Может иметься локальный контроллер модуля, физически установленный внутри модуля, который может быть подчинен контроллеру транспортного средства в транспортном средстве после сборки.
Контроллер транспортного средства, как обозначено в собранном транспортном средстве, может либо посредством диагностики при включении питания на транспортном средстве, либо посредством ручной конфигурации в течение процесса сборки модульного электрического транспортного средства в пределах объема оставшейся части настоящего изобретения, идентифицировать количество, ориентацию и относительное расположение всех сборочных модулей транспортного средства в собранном модульном электрическом транспортном средстве. Программная часть управления для работы и вождения транспортного средства, и для обеспечения поворота транспортного средства, может затем выполняться с помощью контроллера, который может, посредством центральной сети управления на транспортном средстве, подавать необходимые сигналы управления на отдельные питаемые сборочные модули транспортного средства при необходимости. Средства управления оператора для транспортного средства – например, кабина оператора с колесом поворота и/или средства управления скоростью и направлением и т.д. - могут также быть присоединены к центральной сети контроллера и могут подавать их вводы управления на контроллер транспортного средства так, чтобы он мог, на основе требуемых и безопасных вводов оператора, включать питаемые сборочные модули транспортного средства и отдельный привод питания, связанный с их осями и колесами, для перемещения транспортного средства в требуемом направлении, а также при необходимости для выполнения необходимого управления транспортного средства для его поворота в конкретном направлении - например, на основе одного или более питаемых сборочных модулей поворота транспортного средства, которые имеются на транспортном средстве, если оператор обеспечивает управляющий ввод, контроллер может подавать сигнал на сборочные модули поворота транспортного средства надлежащим образом для выполнения требуемого движения поворота.
В дополнение к центральной сети управления или шине сети на собранном транспортном средстве, которые могут быть присоединены или собраны путем соединения между коммуникационной сетью на отдельных модулях, когда они были собраны смежно друг к другу, также может оказаться необходимым иметь другую консолидированную схемотехнику, находящуюся на блоке. Шина сети и питания также может быть предпочтительной для тех случаев, когда были предоставлены или прикреплены дополнительные принадлежности или компоненты к собранному транспортному средству, такие как показанный телескопический погрузчик, что может потребовать питания, а также интерфейс управления, если им необходимо управлять объединенным способом с остальной частью транспортного средства. Также могут иметь место случаи, в которых необходимо обеспечить работу центрального гидравлического трубопровода по всему блоку, который питается от одного или более гидравлических насосов, расположенных на отдельных модулях, или трубопроводов для сжатого воздуха или т.п. - для использования на тормозах или для других вспомогательных целей. Как указано в данном документе, одним из ключевых моментов может быть то, что эти различные центральные трубопроводы или шины необходимо оканчивать на концах собранного транспортного средства - это может быть сделано либо при помощи прикрепления оконечного сборочного модуля транспортного средства, который содержит компоненты оконцевания для различных соединений шин или трубопроводов в нем, либо также возможно обеспечение дополнительных оконечных элементов для установки на одной соединяющей поверхности модуля или одного комплекта разъемов шин или каналов на сборочном модуле транспортного средства с двумя концами, на котором не используется оконечный модуль.
На фиг. 17 показан один пример схемы проводки или сети, показывающий отличие соединений шин и сетей между модулями в примерном варианте осуществления собранного модульного электрического транспортного средства согласно настоящему изобретению. Показаны оконечный модуль, являющийся задним бампером, модуль привода, модуль пассажирского салона, модуль салона водителя и центральный модуль управления, обозначенный как интеллектуальный модуль на этом чертеже. Верхние три провода, показанные на этой схеме, являются объединенной шиной зарядки, при этом батареи в отдельных модулях могут заряжаться от центральной шины зарядки, для чего просто необходимо только одно соединение питания, когда необходимо выполнить зарядку. Средние два показанных элемента представляют собой гидравлическую коробку между различными модулями, при этом нижняя часть для соединений представляет собой сеть области контроллеров в низковольтной шине для обеспечения различного управления модулей в транспортном средстве и низковольтного питания для вспомогательных модулей и т.п.
Следует понимать, что это является только одним из возможных вариантов осуществления шины сети согласно настоящему изобретению и соединения различных центральных услуг между модулями и собранным электрическим транспортным средством в соответствии с его оставшейся частью и что может быть создано множество различных типов конкретных схем соединений и освещения, которые все еще могут выполнять ту же самую задачу центральной инфраструктуры проводки и управления на собранном модульном транспортном средстве, при этом предполагается, что все такие изменения и модификации включены в его объем.
Контроллер модуля
Каждый сборочный модуль транспортного средства может содержать контроллер модуля, присоединенный к центральной шине сети. В случае оконечного сборочного модуля транспортного средства, контроллер модуля может просто представлять собой оконечный элемент для шины сети или это может быть любой контроллер, который может управлять лампами или другими вспомогательными элементами питания на этом модуле. В питаемом сборочном модуле транспортного средства контроллер модуля может быть функционально присоединен к центральной шине сети, а также к питаемой оси, чтобы обеспечивать выводы управления для движения или обеспечения вида этой оси или колес на модуле для обеспечения поворота собранного транспортного средства или вождения по поверхности. Путем обеспечения автономного контроллера модуля внутри каждого модуля транспортного средства, резервирование в системе управления максимально увеличивается и управление собранного транспортного средства упрощается. При помощи контроллера модуля, программируемого для управления каждого соответствующего компонента внутри конкретного модуля, сигналы управления на центральной шине сети транспортного средства могут быть упрощены, так как они были просто нужны для выдачи команд или вызова конкретных выводов управления, которые могут быть интерпретированы контроллером модуля на модулях, которые могут потребоваться для участия в этой деятельности и, в свою очередь могут приводить в действие необходимые элементы. Включение основного контроллера модуля в каждом модуле для сборки в транспортное средство, с необходимыми вводами и выводами управления для приведения в действие указанного модуля, может быть понятно специалистам в области техники, связанной с электронными системами и проектированием управляющих устройств.
Беспроводный интерфейс сети
Как специально рассматривается в конкретных вариантах осуществления настоящего изобретения, может использоваться беспроводный приемопередатчик сети, функционально присоединенный к центральной шине сети, либо с целью обеспечения беспроводной коммуникации между модулями на собранном транспортном средстве, либо альтернативно для обеспечения управления смежных модульных электрических транспортных средств посредством другого модульного электрического транспортного средства согласно настоящему изобретению. Различные модификации, которые могут быть внесены в общую архитектуру сети на готовом транспортном средстве согласно настоящему изобретению, если включена поддержка беспроводной связи, могут понятны специалистам в области техники, связанной с электронными коммуникациями.
Контроллер транспортного средства
В дополнение к контроллеру модуля, имеющемуся на каждом сборочном модуле транспортного средства, собранное модульное электрическое транспортное средство согласно настоящему изобретению может содержать контроллер транспортного средства. Контроллер транспортного средства может быть функционально присоединен к контакту центральной сети транспортного средства и может содержать либо интегрированный компонент в конкретном типе сборочного модуля транспортного средства, либо, как вариант, может просто содержать электронный модуль для прикрепления к порту центральный шины сети где-либо на собранном транспортном средстве. Предполагается, что любой такой подход включен в объем настоящего изобретения. Предполагается, что контроллер транспортного средства представляет собой аппаратный модуль, который может отвечать за общий контроль собранного транспортного средства посредством отправки сигналов управления в отдельные модули в нем на центральной шине сети. Контроллер транспортного средства должен либо распознавать и идентифицировать количество, положение и ориентацию различных модулей в собранном транспортном средстве, либо это может быть введено в программное обеспечение контроллера транспортного средства посредством интерфейса оператора какого-либо типа - на основе этих вводов или распознаваний контроллер транспортного средства может затем загружать или выполнять соответствующее программное обеспечение управления для вождения и поворота или управления периферийных устройств на транспортном средстве.
Интерфейс оператора
Специально предусмотрено, что модульное электрическое транспортное средство согласно настоящему изобретению может либо управляться через беспроводное соединение или аппаратно-реализованным способом с использованием методики «электрического привода». Стандартные аналоговые средства или цифровой интерфейс оператора могут использоваться для захвата вводов оператора, относящихся к эксплуатации транспортного средства, причем эти вводы могут передаваться через контроллер или сеть контроллера на транспортном средстве на компоненты привода в питаемых сборочных модулях транспортного средства для вождения и поворота транспортного средства. С использованием подхода этого типа, с беспроводной технологией, например, транспортное средство может быть эффективно собрано в виде транспортной платформы или транспортного средства для транспортировки без кабины оператора на нем, причем оператор может иметь беспроводной пульт дистанционного управления для использования для управления и манипулирования транспортным средством. Это может быть сделано из соображений безопасности или полезной нагрузки. В других случаях, например, в варианте осуществления грузовика, показанном на фиг. 1-3, кабина оператора может быть расположена на транспортном средстве, при этом кабина оператора может содержать колесо поворота или другие элементы управления, которые могут захватывать вводы оператора для трансляции и коммуникации к компонентам привода на транспортном средстве, чтобы снова координировать его движение и поворот, или другие функциональные возможности.
В варианте осуществления модульного электрического транспортного средства согласно настоящему изобретению, который содержит стороннее соединение шины, с помощью которого сторонние вспомогательные модули могут быть присоединены к сети управления на транспортном средстве, при этом также может использоваться интерфейс управления оператора с соответствующим программным обеспечением или изменением конфигурации, чтобы при необходимости также управлять этими сторонними вспомогательными модулями. Средства управления оператора также могут иметь протоколы безопасности, выполненные в их программном обеспечении так, чтобы, например, сторонний вспомогательный элемент был присоединен к шине сети транспортного средства и этот вспомогательный элемент был в эксплуатации, контроллер на транспортном средстве может блокировать способность перемещать транспортное средство в то время как, например, телескопический рычаг чрезмерно выдвинут, контейнер находится в положении разгрузки или т.п.
Многие типы привода при помощи проводных систем управления могут быть разработаны и использоваться в рамках общей методики настоящего изобретения, при этом все такие подходы явно рассматриваются в рамках его объема.
Средство управления оператора, в определенных обстоятельствах, когда он представляет собой цифровой компьютерный интерфейс или т.п., может позволять оператору или сборщику вводить вручную конфигурацию модуля транспортного средства после его завершения или система управления на транспортном средстве может также автоматически распознавать тип, конфигурацию и взаимное расположение отдельных модулей в транспортном средстве путем запроса сетевых адресов модулей в сети контроллера. При использовании средства цифрового управления оператора сам интерфейс средства управления оператора может также содержать контроллер транспортного средства на транспортном средстве, посредством чего это устройство в дополнение к захвату вводов оператора может также генерировать сигналы коммуникации и инструкции для различных компонентов привода и питания на транспортном средстве для перемещения, поворота или иным образом приведения в действие определенных функций на нем.
В зависимости от конкретной конфигурации модуля собранного модульного электрического транспортного средства согласно настоящему изобретению, этот тип системы управления также поддается простому преобразованию для толкающе-буксировочных операций. Модули оператора кабины, с или без независимого аппаратного управления, могут быть размещены на любом конце транспортного средства или может использоваться беспроводной пульт дистанционного управления также для управления транспортным средством в любом направлении - основной проблемой с толкающе-буксировочной конфигурацией может либо наличие питаемых сборочных модулей поворота транспортного средства на обоих концах транспортного средства для обеспечения поворота от передней части транспортного средства, либо наличие соответствующих средств управления поворота так, чтобы оно могло поворачиваться при движении в любом направлении, при помощи оси поворота на одном конце, или более вероятно, чем не в толкающе-буксировочном сценарии все питаемые сборочные модули транспортного средства могут быть питаемыми сборочными модулями поворота транспортного средства и могут все работать вместе, чтобы обеспечивать поворот транспортного средства.
Интерфейс оператора может быть либо автономным аппаратным устройством, используемым либо на борту транспортного средства больше в проводном или беспроводном привязанном состоянии, чтобы коммуницировать с контроллером транспортного средства и обеспечивать вводы оператора для вождения, поворота и другого управления собранного транспортного средства. Интерфейс оператора и контроллер транспортного средства могут представлять собой отдельные аппаратные компоненты или в некоторых случаях могут быть интегрированы в одной аппаратной и программной комбинации. Оба эти подхода рассматриваются в рамках настоящего изобретения.
Вспомогательные модули
В дополнение к обеспечению наличия на определенных сборочных модулях транспортного средства согласно настоящему изобретению точек крепления сторонних компонентов к транспортному средству, также может оказаться необходимым обеспечить интерфейс стороннего компонента либо для сети управления, либо для коммуникационной сети на собранном транспортном средстве и/или для других центральных трубопроводов - гидравлических, пневматических и т.п. Путем обеспечения возможности присоединять питание, гидравлику или т.п. к стороннему компоненту открывается другая полная область гибкости с точки зрения доставки и конечного применения этих транспортных средств, поскольку третья сторона может производить компоненты, которые могут взаимодействовать посредством интерфейса с данными транспортными средствами и которым просто нужно знать правильные соединения, коммуникацию и эксплуатационные параметры, которые могут обеспечиваться этими интерфейсами. Путем обеспечения возможности взаимодействия посредством интерфейса сторонних компонент с сетью управления на транспортном средстве также можно для средств управления как описано более подробно ниже, интегрировать управление этими сторонними компонентами вместе с вождением транспортного средства.
Примеры сторонних компонентов, которые могут быть прикреплены и которым может или не может потребоваться интеграция управления могут представлять собой, например, воздушный компрессор или вспомогательный преобразователь питания - если само транспортное средство не содержит воздуховоды, например, однако в некоторых промышленных применениях, в которых требуется сжатый воздух, сторонний воздушный компрессор может быть прикреплен к транспортному средству и присоединен к шине питания для подачи питания на воздушный компрессор. В других приложениях может потребоваться и вспомогательный преобразователь питания или даже что-то вроде парогенератора или т.п., в некоторых приложениях. Многие виды сторонних компонентов могут быть интегрированы и управляться основными модульными электрическими транспортными средствами согласно настоящему изобретению путем обеспечения средств крепления, а также средств связи этих компонентов в средствах управления и в других подающих трубопроводах на транспортном средстве. Предполагается, что обеспечение протокола и стандартизованных средств и способа крепления для этих компонентов также находится в пределах объема настоящего изобретения.
Вспомогательные модули могут также включать в себя нижеследующее модули для прикрепления к остальной части транспортного средства:
a) кабина оператора;
b) модуль с местами для пассажиров;
c) поверхность платформы;
d) подъемное устройство;
e) контейнер полезной нагрузки; или
f) бак полезной нагрузки.
На фиг. 5-16 показаны некоторые другие примеры модульных электрических транспортных средств согласно настоящему изобретению. На фиг. 5 и 6, например, показан телескопический погрузчик, собранный сходным образом с грузовиком согласно фиг. 1-3. Транспортное средство 1 содержит множество сборочных модулей транспортного средства, в том числе два питаемых сборочных модуля 5 транспортного средства, непитаемый модуль 6 кабины оператора, два оконечных модуля 4, представляющих собой сборки бампера, и два непитаемых модуля 10 поверхностной опоры/рычажной опоры. Фактический телескопический погрузчик в сборке на блоке, показанный посредством 11, может быть надплатформенным модульным компонентом, который может быть добавлен на платформу на месте и присоединен к шине управления/сети на транспортном средстве, чтобы обеспечить интегрированное управление оператора. Телескопический погрузчик 11 может характеризоваться как бортовой компонент постольку, поскольку он может быть прикреплен к основанию готового собранного транспортного средства. Если бы он был физически интегрированным с изготовленным сборочным модулем транспортного средства, то его можно было бы рассматривать как часть самого модуля. Эта конкретная модель модульного электрического транспортного средства согласно настоящему изобретению имеет два питаемых сборочных модуля поворота транспортного средства, которые могут использоваться для поворота транспортного средства при очень малых радиусах.
Фиг. 7 и 8 показывают концепцию трехосного грузовика, снова собранного в соответствии с общей концепцией модульного электрического транспортного средства согласно настоящему изобретению. В данном случае имеются три питаемых сборочных модуля 5 транспортного средства, один из которых выполнен с возможностью поворота на передней части транспортного средства, при этом две задние оси не выполнены с возможностью поворота. Два дополнительных вспомогательных модуля, добавленных к транспортному средству, представляют собой передний и задний контейнеры хранения наверху транспортного средства, показанные посредством 14 и 15 соответственно. Также показаны оконечные модули 4 и модуль 6 кабины.
Еще одно альтернативное модульное электрическое транспортное средство согласно настоящему изобретению показано на фиг. 9-10 - это вариант осуществления пятиосного самосвала с боковым опрокидыванием и с четырьмя питаемыми сборочными модулями 5 поворота транспортного средства и опрокидным контейнером 13, прикрепленным к верхней части транспортного средства. Центральный питаемый сборочный модуль 5 транспортного средства не является модулем поворота на показанных чертежах, при этом соседние два питаемых сборочных модуля 5 транспортного средства ближе к центру являются модулями поворота в меньшей степени, чем модули на дистальных концах транспортного средства. Степень поворота, которая может обеспечиваться каждым модулем, может регулироваться с помощью контроллера на транспортном средстве на основе его распознания близости каждого питаемого сборочного модуля 5 транспортного средства к центру поворота транспортного средства. Опрокидный контейнер 13 является лишь одним примером большего приспособления, которое может быть добавлено к платформе транспортного средства, собранного из множества сцепляющихся с грунтом питаемых сборочных модулей транспортного средства или непитаемых сборочных модулей транспортного средства модули - средства управления опрокидывания для самого контейнера могут быть присоединены к шине сети оставшейся части транспортного средства.
На фиг. 11 показан вид в аксонометрии варианта осуществления пятиосного грузовика с плоской платформой модульного электрического транспортного средства согласно настоящему изобретению с четырьмя питаемыми сборочными модулями поворота транспортного средства, которые сходны с вариантом осуществления с опрокидным контейнером согласно фиг. 9 и 10. Фиг. 12 представляет собой вид сбоку варианта осуществления пятиосного грузовика с плоской платформой согласно фиг. 11. Сборка этого конкретного модульного транспортного средства является такой же, как сборка показанного выше грузовика с опрокидным контейнером, причем из пяти питаемых сборочных модулей транспортного средства четыре из них снова являются модулями поворота и показаны в положении поворота.
Фиг. 13 представляет собой вид в аксонометрии четырехосного грузовика с плоской платформой согласно настоящему изобретению, с двумя питаемыми сборочными модулями поворота транспортного средства друг на друге, причем два других не являются модулями поворота. Фиг. 14 представляет собой вид сбоку этого грузовика. Два передних питаемых сборочных модуля 5 транспортного средства на грузовике по этому варианту осуществления являются теми же, которые используются для поворота в этом случае и этот конкретный показанный вариант осуществления показывает другой способ поворота и конфигурацию поворота мультиосного транспортного средства в соответствии со способом настоящего изобретения.
Наконец, показывая один дополнительный вариант на модульном электрическом транспортном средстве согласно настоящему изобретению, фиг. 15 и 16 показывают вид в аксонометрии сбоку четырехосного автомобиля-цистерны, собранного согласно настоящему изобретению. В этом случае снова имеются два из четырех питаемых сборочных модулей 5 транспортного средства, в передней части транспортного средства, которые являются модулями поворота, как это имеет место в варианте, показанном на фиг. 13 и 14. Также показана цистерна 12, являющаяся еще одним необязательным приспособлением или реализацией, которая может быть использована с модульным электрическим транспортным средством оставшейся части настоящего изобретения.
В дополнение к взаимозаменяемым питаемым и непитаемым сборочным модулям транспортного средства, описанным в данном документе, которые могут использоваться для сборки модульного электрического транспортного средства согласно настоящему изобретению, также могут использоваться разнообразные вспомогательные модули, которые также могут быть добавлены взаимозаменяемым образом к транспортным средствам. С точки зрения этих дополнительных модулей, они могут быть любым присоединяемым, опциональным или взаимозаменяемым компонентом, который может быть добавлен к транспортному средству, которое не содержит либо оконечный модуль, либо модуль с двумя концами для сборки в фактический корпус и конструкцию транспортного средства, как указано в другом месте выше по отношению к питаемым и непитаемым модулям. Например, что-то вроде опрокидного контейнера или некоторого другого типа инструментальных средств или модуля хранения может быть прикреплено к верхней части платформы 7 грузовика, показанного на фиг. 1-3 постольку, поскольку этот тип компонента инструментальных средств или хранения может быть опционально добавлен к или удален из транспортного средства, как это может быть снова понятно специалистам в данной области техники. Может оказаться необходимым обеспечить заданные точки крепления для этих компонентов на одном или более типах сборочных модулей транспортного средства - данные заданные точки крепления могут быть включены в изготовление этих сборочных модулей транспортного средства таким образом, что точки крепления на надлежащих необходимых местах на различных модулях в различных конфигурациях транспортного средства могут быть доступны для прикрепления различных взаимозаменяемых компонентов.
Управление смежных транспортных средств
Другая опция, рассматриваемая в пределах объема настоящего изобретения, может обеспечивать, предпочтительно либо для проводного или беспроводного соединения, управление смежных транспортных средств контроллером 41 головного транспортного средства, изготовленного согласно настоящему изобретению. Поскольку каждое транспортное средство может получать питание, необязательно физически соединять транспортные средства, как это может сделано в конфигурации тягача с тракторным прицепом или т.п., при этом может быть разработано необходимое программное обеспечение для управления, чтобы обеспечить конкретное ведущее транспортное средство в группе транспортных средств для подчинения этих других транспортных средств и эффективного обеспечения их «следования» при работе. Это позволило бы использование конфигурации цепочки небольших транспортных средств, чтобы свести к минимуму требования оператора и при этом максимально увеличить характеристики полезной нагрузки и т.д. - в частности, и, например, в ситуациях с крутыми поворотами, когда только короткие транспортные средства могут выполнять требуемые повороты. Возможность присоединения к следующему транспортному средству и управлять его поворотом и движением является еще одним аспектом системы управления согласно настоящему изобретению, который явно описан в данном документе. Физически соединение между ведущим и ведомым транспортными средствами может иметь формат кабеля для передачи данных или соединения, подключенного между этими транспортными средствами, или, скорее всего, контроллеры на отдельных транспортных средствах могут беспроводным образом присоединяться друг к другу и работать в режиме агрегированной сети. Там, где эти транспортные средства предназначены для использования в этом режиме либо по их периферии, либо по меньшей мере на их оконечных концах, вероятно может иметь место, что также может использоваться некоторый тип датчиков близости, так что всегда может сохраняться безопасное расстояние между смежными транспортными средствами и зоной стены и т.д. Также может даже иметь место, что для соединения транспортных средств в приблизительно правильной близости и взаимном расположении друг к другу в формате «цепочки», после выполнения первого беспроводного квитирования или спаривания между транспортными средствами, на основе использования датчиков близости, следующее транспортное средство может автоматически маневрировать в правильное положение за ведущим транспортным средством, а затем, как часть и этап операции управления, сохранять его дистанцию и интервал. Методика управления, например, вышеуказанная, может даже устранить необходимость осторожного маневрирования транспортного средства в положение по отношению к ведущему транспортному средству.
Программное обеспечение управления
Предполагается, что адаптируемая программная часть управления с распознаванием может использоваться на контроллере или контроллерах на транспортном средстве согласно настоящему изобретению, так что на основе либо автоматизированной детекции, или введенной вручную конфигурации различных сборочных модулей транспортного средства в собранном модульном электрическом транспортном средстве, программная часть управления питанием и приводом может быть изменена или выполнена таким образом, что она может функционировать для транспортного средства в соответствии с конфигурацией. Например, в транспортном средстве, которое было собрано при помощи множества питаемых сборочных модулей транспортного средства, в том числе более одного питаемого сборочного модуля поворота транспортного средства, относительные вводы поворота, которые могут потребоваться для оборудования поворота на питаемых сборочных модулях поворота транспортного средства для поворота транспортного средства, могут быть основаны, среди прочего, на близости конкретной оси или модуля к центру поворота транспортного средства. Контроллер может быть либо иметь необходимую изменяемую программную часть для автоматической идентификации и приспособления к этим сценариям, либо соответствующее программное обеспечение может быстро загружаться на контроллер на основе выбора конфигурации модуля для транспортного средства. Предполагается, что любой подход снова находится в пределах объема настоящего изобретения. Главным является то, что либо один контроллер, присоединенный к шине сети, либо сети управления на собранном транспортном средстве, путем присоединения шины сети, когда она проходит через каждый смежный модуль собранного транспортного средства, либо сети контроллеров, в которой каждый отдельный модуль содержит контроллер, могут автоматически идентифицировать и адаптировать поведение управления транспортного средства на основе размеров, конкретного места и сборки модулей в готовом транспортном средстве.
Выбираемые пользователем режимы поворота
Некоторые конфигурации модульных электрических транспортных средств, которые изготовлены или собраны в соответствии со способом согласно настоящему изобретению, могут включать в себя выбираемые пользователем режимы поворота. Например, может оказаться, что, когда множество питаемых сборочных модулей поворота транспортного средства находится на месте на передней оси транспортного средства, может быть выбран только поворот, или все оси поворота, даже если все эти оси на транспортном средстве в целом являются осями поворота, могут использоваться для поворота транспортного средства. Эти различные типы режимов поворота могут быть выбраны оператором для различных условий эксплуатации, при этом предполагается, что это может оказаться еще одним важным преимуществом для модульной сборки и сетевой методики управления модульного транспортного средства согласно настоящему изобретению. Режимы поворота могут включать в себя передний поворот, задний поворот, поворот посредством всех колес или (параллельный) поворот всеми колесами.
Шпоночные кабельные соединения
Насколько это может потребоваться для сборщика или оператора транспортного средства, либо сборка, либо замена в сборочном модуле транспортного средства для транспортного средства, либо на сборочной площадке, либо на месте или на месте эксплуатации, одно обстоятельство, которое может оказаться предпочтительным для предоставления в качестве опции для наиболее полного упрощения взаимного соединения смежных сборочных модулей транспортного средства, заключается в том, чтобы сделать соединения шин или трубопроводов между модулями шпоночными, так что они могут быть соединены только правильным образом. Помимо цветового кодирования, которое просто недостаточно, использование шпоночных соединений, так что они могут быть собраны только правильным образом, было бы полезно для сборщика или обслуживающего персонала на месте эксплуатации, поскольку это может обеспечить максимальную скорость при обслуживании транспортного средства или сборке и минимизировать возможность неправильного присоединения монтажной сети на транспортном средстве и причинения значительного ущерба этим системам на нем. Использование шпоночных соединений для кабелей или трубопроводов для использования с дополнительными вспомогательными модулями, а также с взаимозаменяемыми сборочными модулями транспортного средства для реализации по направлению движения транспортного средства, также рассматривается как включенное в объем настоящего изобретения.
Центральная сеть управления
В дополнение к собранному модульному электрическому транспортному средству согласно настоящему изобретению также раскрыта центральная сеть управления для использования на таком транспортном средстве.
Сборочный модуль транспортного средства
Сборочные модули транспортного средства в соответствии с остальной частью настоящего изобретения образуют изобретение, рассматриваемое в данном случае как самостоятельное, в дополнение к собранному модульному транспортному средству.
Вышеуказанное рассматривается лишь в качестве иллюстрации принципов изобретения. Таким образом, хотя выше описаны некоторые аспекты и варианты осуществления изобретения, они представлены только в качестве примера и не предназначены для ограничения объема изобретения, изложенного в описании и формуле изобретения. Изобретение, описанное в данном документе, может быть воплощено во множестве других форм без удаления от сущности изобретения.
Реферат
Группа изобретений относится к электрическим тяговым системам транспортных средств. Модульное электрическое транспортное средство содержит множество взаимозаменяемых сборочных модулей транспортного средства. Каждый модуль содержит соединяющую поверхность для прикрепления к примыкающему смежному модулю, центральную шину питания, источник электрического питания, центральную шину сети, электрически питаемую ось и контроллер модуля. Питаемый сборочный модуль выполнен с возможностью поворота посредством взаимодействия контроллера с питаемой осью. Контроллер транспортного средства выполнен с возможностью распознавать конфигурацию транспортного средства и выбирать соответствующее программное обеспечение управления на основе этой конфигурации. Интерфейс оператора, присоединенный к контроллеру транспортного средства и обеспечивающий возможность оператору и управлять транспортным средством. Также заявлены центральная сеть управления для использования на модульном электрическом транспортном средстве и взаимозаменяемый сборочный модуль транспортного средства. Технический результат заключается в изготовлении модульного электрического транспортного средства, обладающего наибольшей степенью гибкости конфигурации. 3 н. и 40 з.п. ф-лы, 17 ил.
Комментарии