Устройство автоматического контроля скорости, остановки и обеспечения управления транспортом - RU2068361C1
Код документа: RU2068361C1
Чертежи





Описание
Изобретение относится к устройству для автоматического контроля скорости, остановки и обеспечения управления движением транспорта, в частности железнодорожного.
Известно устройство для автоматического контроля скорости, остановки и обеспечения управления транспорта, преимущественно железнодорожного, содержащее средства обнаружения всех вдоль железнодорожного пути, один из которых установлены на каждом из дорожных участков с постоянным выбранным интервалом между ними, средства обработки сигналов, выданных средствами обнаружения, для управления скоростью движения поезда в зависимости от его положения и мгновенной скорости, включающие в себя узел задания программы движения поезда в виде кодов, несущих информацию о заданной скорости движения на уровне указанной вехи, и счетно-решающий блок, соединенный одним из входом с одним из выходов, выдающим сигналы об интервале пройденного пути, средств обнаружения и систему контроля превышения скорости, соединенную одним из входов с одним из выходов узла задания программы движения поезда, другим входом с датчиком действительной скорости, а выходом связанную со средствами экстренного торможения поезда.
Надежность работы известного устройства и, следовательно, безопасность движения поездов основываются на безукоризненно точном и правильном обнаружении вех, расставленных на земле вдоль полотна железной дороги.
Действительно, необнаруженная веха позволяет локально превысить скорость движения поезда по сравнению с той, которая разрешалась бы в случае нормального обнаружения всех вех.
Например, выход из строя или повреждение системы обнаружения, устраняющие возможность опознавания одной из двух вех на участке дороги, на котором предписывается движение с постоянной скоростью разрешает увеличить в два раза максимальную скорость движения поезда.
Напротив, неуместное обнаружение всех "признаков" (не существующих) не оказывает отрицательного влияния на безопасность движения поезда потому, что это ошибочное обнаружение дополнительных вех, которых в действительности нет, искусственно уменьшает максимально разрешенную скорость движения.
Следовательно, необходимо располагать гарантией надежности обнаружения всех вех каждой железнодорожной линии независимо от того, являются ли эти вехи постоянными или временными.
Задачей изобретения является устранение недостатков, присущих устройствам, работающим на принципе программирования маршрута движения поездов через обработку сигналов, получаемых от вех, путем создания устройства, отличающегося значительно более простой конструкцией по сравнению с вышеуказанными известными устройствами и более высокой надежностью работы.
Для достижения технического результата в устройстве для автоматического контроля скорости, остановки и обеспечения управления транспорта, преимущественно железнодорожного поезда, содержащем средства обнаружения вех вдоль железнодорожного пути, одни из которых установлены на каждом из дорожных участков с постоянным выбранным интервалом между ними, средства обработки сигналов, выданных средствами обнаружения, для управления скоростью движения поезда в зависимости от его положения и мгновенной скорости, включающие в себя узел задания программы движения поезда в виде кодов, несущих информацию о заданной скорости движения на уровне заданной вехи, и счетно-решающий блок, соединенный одним концом из входов с одним из выходов, выдающим сигналы об интервале пройденного пути, средств обнаружения, и систему контроля превышения скорости, соединенную одним из входов с одним из выходов узла задания программы движения поезда, другим входом с датчиком действительной скорости, а выходом связанную со средствами экстренного торможения поезда, вехи на входе каждого дорожного участка расположены группами определенной конфигурации с возможностью образования опознавательных реперов дорожного участка для включения устройства, средства обработки сигналов снабжены контуром опознавания реперов, датчиком импульсов времени и узлом когерентности, а узел задания программы движения поезда представляет собой размещенный на поезде блок хранения программы движения поезда, дополненный элементами, содержащими коды, несущие информацию, касающуюся типа вехи на земле, которая должна быть обнаружена, и информацию, относящуюся к номеру пройденного дорожного участка, при этом узел когерентности с окном безопасности, предназначенный для обеспечения нахождения сигналов, относящихся к обнаруженным на земле вехам, и сигналов, поступающих от блока хранения программы движения поезда в пространственном окне, имеющем предварительно определенную величину, включает в себя симметричную цепь обработки сигналов, поступающих от средств обнаружения вех и сигналов, поступающих от блока хранения программы движения поезда, имеющую для сигналов, поступающих от средств обнаружения вех, первый буферный блок памяти, соединенный с вторым выходом, выдающим сигналы обнаружения вех, средств обнаружения, который соединен с одним и входов первого вентильного элемента И, выход которого соединен с информационным входом первого регистра сдвига определения пространственного окна для сигналов от вех, второй вентильный элемент И, один из входов которого соединен с вторым выходом средств обнаружения, а выход с входом возврата в нулевое состояние второго регистра сдвига, определения пространственного окна для сигналов, поступающих от блока хранения программы движения поезда и второго буферного блока памяти для сигнала, поступающего от блока хранения программы движения поезда, выход второго буферного блока памяти через один из инверторов и непосредственно соединен с другими входами первого и второго вентильного элемента И соответственно, третий вентильный элемент И, один вход которого через другой инвертор соединен с выходом первого буферного блока памяти, второй с одним из выходов счетно-решающего блока, управляющего доступом к блоку хранения программы движения поезда, а выход с информационным входом второго регистра сдвига определения пространственного окна для соответствующих ложным вехам сигналов блока хранения программы движения поезда, четвертый вентильный элемент И, один вход которого соединен с выходом первого буферного блока памяти, другой с выходом счетно-решающего блока, а выход с входами возврата в нулевое состояние регистра сдвига и первого буферного блока памяти, при этом каждый из выходов первого и второго регистров сдвига соединен с входами вентильного элемента ИЛИ, предназначенного для выдачи сигналов управления экстренным торможением в случае, если сигналы отделены на расстояние, превышающее пространственное окно, входы контура опознания реперов соединены с выходами датчика импульсов времени и средств обнаружения, а выход с вторым входом счетно-решающего блока, а датчик импульсов времени подключен к управляющим входам регистров сдвига, система контроля превышения скорости содержит частотомер, подключенный к выходу средств обнаружения для формирования сигналов действительной скорости и средство считывания заданной скорости, а блок хранения программы движения поезда дополнен элементами, содержащими коды соответствующей дополнительным "ложным" вехам, предназначенным для изменения скорости в определенных точках пути.
На фиг. 1 дана сводная схема состава устройства контроля и управления движения поезда, выполненного согласно изобретению; на фиг. 2 более подробная электрическая схема устройства, показанного на фиг. 2; на фиг. 3 - электрическая схема контура контроля скорости движения поезда с помощью устройства, выполненного согласно изобретению; на фиг. 4 когерентная схема организации управления инициированием устройства, показанного на фиг. 1; на фиг. 5 связанная схема организации процесса обнаружения вех дорожных участков с помощью устройства, изображенного на фиг. 1; на фиг. 6 связанная схема организации считывания информация, выдаваемой ЗУ устройства, изображенного на фиг. 1; на фиг. 7 схема организации процесса трогания поезда с места.
Для гарантирования обнаружения вех, расставленных на земле вдоль железнодорожного пути, устройство, выполненное согласно изобретению, использует принцип составления описания в кодовой форме положения всех вех маршрута движения поезда, которое хранится в ЗУ компьютера, установленного в кабине машиниста.
Соединенный с поездом счетчик пройденного пути позволяет заставить ЗУ создать в нем кодовый сигнал, определяющий ложную веху.
Начало реализации (инициирование) подобной кодовой записи обеспечивается репером идентификации (опознавания) дорожного участка, в который входит поезд. Система или цепь совпадений с пространственным "окном" безопасного расхождения сигналов обеспечивает действительность обнаружения вехи на земле по отношению к ложной вехе, кодовая информация от которой находится в памяти ЗУ устройства.
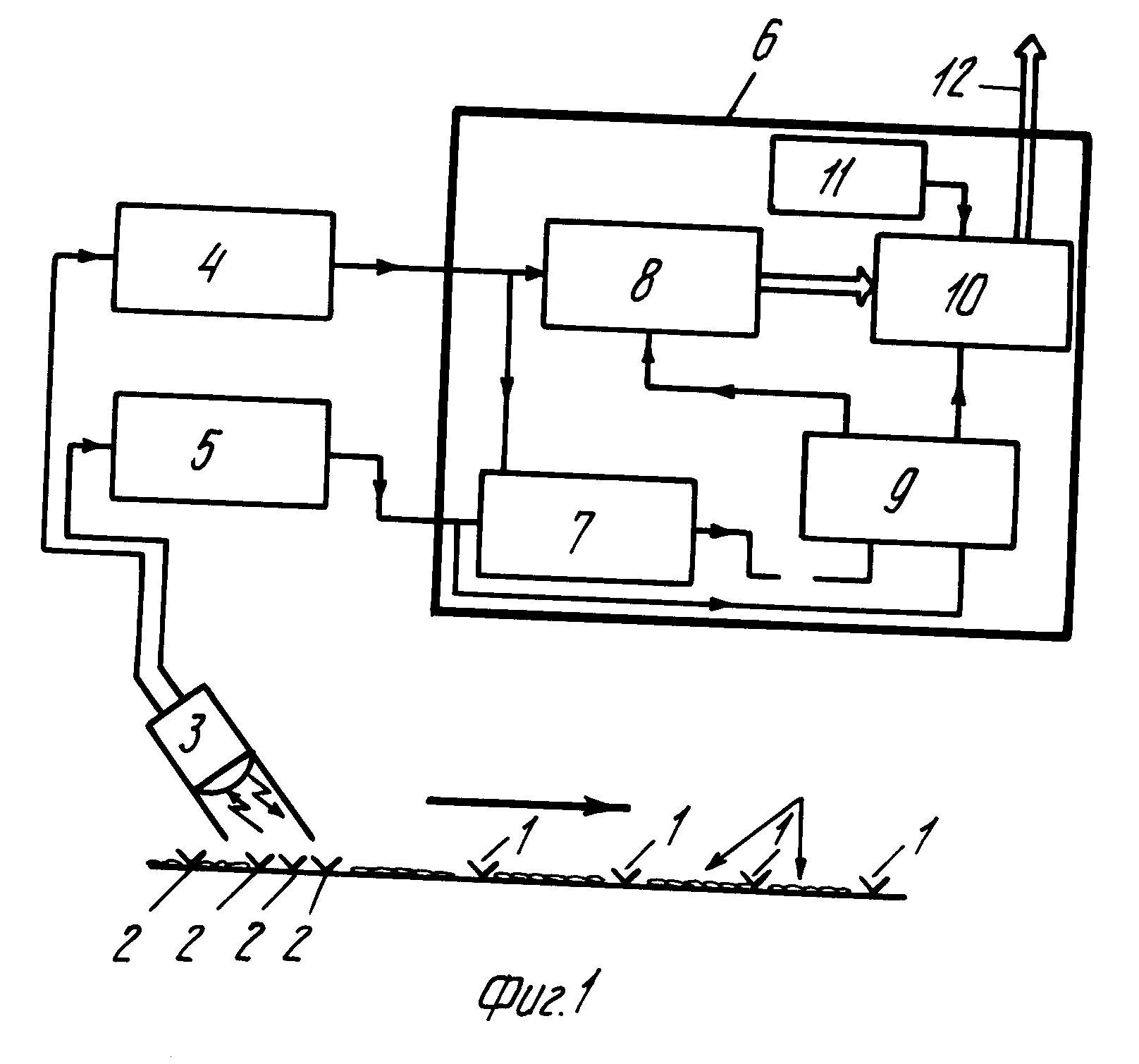
Устройство, изображенное на фиг. 1, имеет связь с железнодорожным путем, вдоль полотна которого расставлены вехи в форме двухгранных углов 1 с равномерными интервалами друг от друга.
Вехи 2, расположенные на входе каждого дорожного участка по определенной конфигурации, образуют репер инициирования устройства для его работы в режиме начала реализации кодирования.
Собственно само устройство состоит из локатора Допплера 3 для обнаружения вех 1 и 2, который монтируется на поезде, направлен в сторону щебеночного балласта железнодорожного полотна и ориентирован на вехи.
Локатор 3 имеет один выход, подсоединенный к цепи 4 обнаружения вех или двугранных углов 1, 2, и второй выход, подсоединенный к цепи 5 фиксирования проходимого интервала пути.
Эти две цепи подключаются, в свою очередь, к компьютеру безопасности 6, который содержит контур 7 опознавания репера инициирования, содержащий первый вход, подсоединенный к выходу цепи 5 обнаружения этого репера, и второй вход, соединенный с выходом цепи 4 обнаружения двугранных углов.
Компьютер 6 содержит, кроме того, систему 8 когерентности, выдающую или определяющую длину безопасного "окна" спектра расхождения сигналов различного происхождения (о чем было сказано выше), вход которой соединен с выходом цепи 4 обнаружения вех, а второй вход подключен к выходу ЗУ 9, содержащему в своей памяти описание в кодовой форме расположения вех или двухгранных углов, соответствующее маршруту, по которому должен следовать данный поезд, и скорости, которую он должен соблюдать во время движения.
ЗУ 9 содержит, кроме того, входное устройство, соединенное с контуром 7 опознавания реперов 2, и другое входное устройство подсоединенное к выходу цепи 5 фиксирования пройденного интервала пути.
Система 8 когерентности с безопасным "окном" спектра расхождения сигналов соединяется с системой контролирования превышения скорости 10, один вход которой подключен с одной стороны к ЗУ 9, а другой вход подсоединен к базовой цепи времени 11.
Выход системы контроля превышения скорости 10 соединяется линией 12 с органами экстренного (аварийного) торможения поезда, которые не показаны на фиг. 1.
Вехи или двухгранные углы 1, 2, расположенные вдоль железнодорожного полотна, выполняют две функции:
инициирование положения поезда с помощью репера идентификации;
гарантирование безопасности движения поезда на дорожном участке, который он проходит, через точное знание своего пробега
благодаря использованию программы движения, записанной в кодовой форме и
хранящейся в ЗУ устройства.
Электрическая схема, изображенная на фиг. 2, содержит локатор Допплеpа 3, выход которого подключен к буферному блоку памяти (М1), хранящему сигналы, возникающие в результате обнаружения вех.
ЗУ 9, хранящее в своей памяти описание в кодовой форме установки вех, соединяется с буферным блоком памяти (М2).
Блоки памяти (М1) и (М2) подключены к устройствам возврата в нулевое положение (RAZ).
Вышеупомянутый выход локатора Допплера 3 подсоединяется к входу вентильной схемы (ET P1), второй вход которой соединяется через инвертер (I 1) с выходом блока памяти (М2).
Выход вентильной схемы (P1) соединен с входом регистра сдвига (P1), который содержит вход от часового датчика (Н) и вход, через который он подключен к органу возврата в нулевое положение (RAZ 1).
Выход блока памяти (М2) соединен с входом второй вентильной схемы (ET P2), другой вход которой соединяется с выходом локатора Допплера 3, через который идут сигналы обнаружения вех или двухгранных углов.
Выход блока памяти (М1) соединен с входом в третью вентильную схему (ET P3) через инвертер (12), а также с входом в четвертую вентильную схему (ET P4).
Другие входы вентильных схем Р3 и Р4 подключаются к выходу адресного счетно-решающего устройства (С1), которое, в свою очередь, подсоединено также к входу ЗУ 9, хранящего в своей памяти описание в кодовой форме расположения вех.
Выход вентильной схемы (ET P3) связан с входом второго регистра сдвига (R2), который содержит вход от часового датчика (Н) и вход органа возврата в нулевое положение (RAZ 2).
Выход вентильной схемы (ET P2) подключен к входу органа возврата в нулевое положение (RAZ 2) регистра сдвига (R2).
Выход вентильной схемы (ET P4) соединяется с входом органа возврата в нулевое положение (RAZ 1) регистра сдвига (R1).
Устройство содержит контур 7 опознавания репера идентификации дорожного участка, управляющийся теми же сигналами датчика времени (Н), что и регистры сдвига (R1) и (R2), что и адресное счетно-решающее устройство (C1), и вход которого соединен с выходом локатора Допплера 3, через который идет информация о пройденном интервале пути.
Контур 7 подключен своим выходом к адресному счетно-решающему устройству (С1).
Регистры сдвига (R1) и (R2) имеют свои выходы, соединенные с входами вентильной схемы (OU P5), которая выдает сигнал управления экстренным торможением поезда.
Система контроля превышения скорости 10, изображенная на фиг. 3, имеет в своем составе адресное счетно-решающее устройства (С2), подключенное к выходу локатора 3, через который выдается информация о пройденном интервале пути.
Этот выход подсоединяется также к частотомеру (F1), измеряющему действительную скорость движения поезда.
Выход частотомера (F1) подключен к входу блока сравнения (СО), другой вход которого подсоединен к контуру или цепи (LV), выдающей предписанную скорость движения, хранящуюся в кодированной форме в памяти.
Выход блока сравнения (СО) предназначен для управления средствами торможения поезда, не показанными на чертеже.
Информация в кодовой форме, хранящаяся в ЗУ 9 и
описывающая расположения вех, содержит, например, 8 двоичных единиц (байтов) кодирования предписанной скорости движения, две двоичные единицы
кодирования типа сообщения, например:
00
индикация вехи,
01 индикация ложной вехи,
10 индикация предписанной скорости.
и 6 двоичных единиц кодирования номера дорожного участка.
Что касается локатора Допплера 3, то он показывает, как это видно на фиг. 3, положение вех 1 и положение ложной вехи (1p).
Учитывая такое положение, получается индикация новой предписанной скорости движения поезда.
Принцип функционирования системы когерентности 8, описанный со ссылками на фиг. 3, состоит в следующем.
Система когерентности получает на своем входе информацию, происходящую из локатора Допплера 3.
Этот счетчик 3 выдает, с одной стороны, импульсы обнаружения вех или двухгранных углов 1, 2, расставленных на земле вдоль железнодорожного полотна, и, с другой стороны, сигнал, представляющий пройденный интервал пути. Эти сигналы направляются соответственно к цепям обнаружения 4 и 5.
Одновременно в индикационном устройстве ЗУ 9 осуществляется считывание импульсов, касающихся вех, описанных по команде сигналов, воспроизводящих пройденный интервал пути.
Инициирование адресата (кодирования номера ячейки ЗУ) этого считывания осуществляется благодаря опознаванию репера идентификации, образованного вехами 2 на входе рассматриваемого дорожного участка. Адресное счетно-решающее устройство (С1) работает в дальнейшем с ритмом перемещения поезда, определяющимся сигналами, поступающими с выхода локатора 3 и фиксирующими пройденный интервал пути.
Система когерентности работает на принципе уравновешивания. Она контролирует, чтобы при присутствии на одном из ее входов импульса, соответствующий ему по природе импульс обязательно приходил на другой ее вход внутри пространственного "окна" допустимого расхождения этих сигналов, имеющего заранее определенную длину, равную например, 20 см.
В случае обнаружения вехи
на земле импульс
направляется:
с одной стороны в блок памяти (М1);
с другой стороны на вход вентильной схемы (ET P1).
Вентильная схема (ET) получает на своем другом входе выходной сигнал с обратным знаком (обратный сигнал) из блока памяти (М2).
Могут представиться два случая:
двухгранный угол или веха первая, которая должна быть
обнаружена;
двухгранный угол, находящийся в памяти, уже оказался обнаруженным.
В первом случае, обнаруженный двухгранный угол или веха запоминается в блок-памяти (М1).
Импульс передается также в регистр сдвига (R1), который начинает работать в ритме часового датчика интервала пути.
Импульс передается через вентильную схему (ET P1), т.к. ее другой вход находится в состоянии (I1), поскольку блок-памяти (M2) "пустая".
Если никакой сигнал от органа возврата в нулевое положение (RAZ) не направляется в регистр сдвига (R1), то входной импульс должен выйти по завершении N-го числа импульсов датчика времени и направиться к устройствам экстренного торможения через вентильную схему (OU P5).
Во втором случае импульс направляется на вход вентильной схемы (ET P2), другой вход которой получает сигнал из блока памяти (М2).
Выходной сигнал вентильной схемы (ET P2) служит для возврата в нулевое положение в регистре сдвига (R2) и также в блоке памяти (М2) после выдержки времени.
Длина пространственного "окна" безопасного расхождения сигналов зависит от числа двоичных единиц регистра сдвига.
Если локатор Допплера 3 порождает или создает импульс каждые 2 см при длине вышеуказанного "окна" 20 см, то регистр сдвига имеет 10 ячеек памяти или байтов.
Принцип работы системы контроля превышения скорости 10 в случае расположения всех с интервалами неизменной длины является следующим.
Система или цепь контроля и регулирования предписанной скорости движения поезда, представленная на фиг. 3, считывает из ЗУ предписанные скорости движения в зависимости от продвижения поезда по дорожному участку.
Продвижение с учетом его соответствия с программой движения, заложенной в ЗУ 9, надежно контролируется системой когерентности (фиг. 2).
Выход локатора 3, выдающий сигналы, соответствующие пройденному интервалу пути, подключен к частотомеру (F1), который показывает почти мгновенную скорость движения поезда.
Эта скорость направляется в числовой форме в блок сравнения (СО), который получает на своем другом входе сигнал в кодированной форме скорости, предписанной техникой безопасности, заложенной в память для соответствующего участка пути ЗУ 9, и считывающейся с помощью контура считывания (LV).
Выходной сигнал блока сравнения воздействует на устройстве экстренного торможения поезда, если действительная скорость поезда превышает на данном участке дороги скорость, которую приписано поддерживать в соответствии с условиями безопасности.
Если "ложные" вехи 1p, обнаруженные на земле, оказываются в достаточном количестве и распределенными равномерным образом вдоль железнодорожного полотна, то можно упразднить некоторую часть (число) или даже все вехи, расставленные с неизменным интервалом друг от друга.
ЗУ 9 будет содержать в своей памяти тогда только описание в кодированной форме расположения этих "ложных" вех.
Ниже дается описание работы устройства, выполненного согласно изобретению со ссылками на схемы, изображенные на фиг. 4 7.
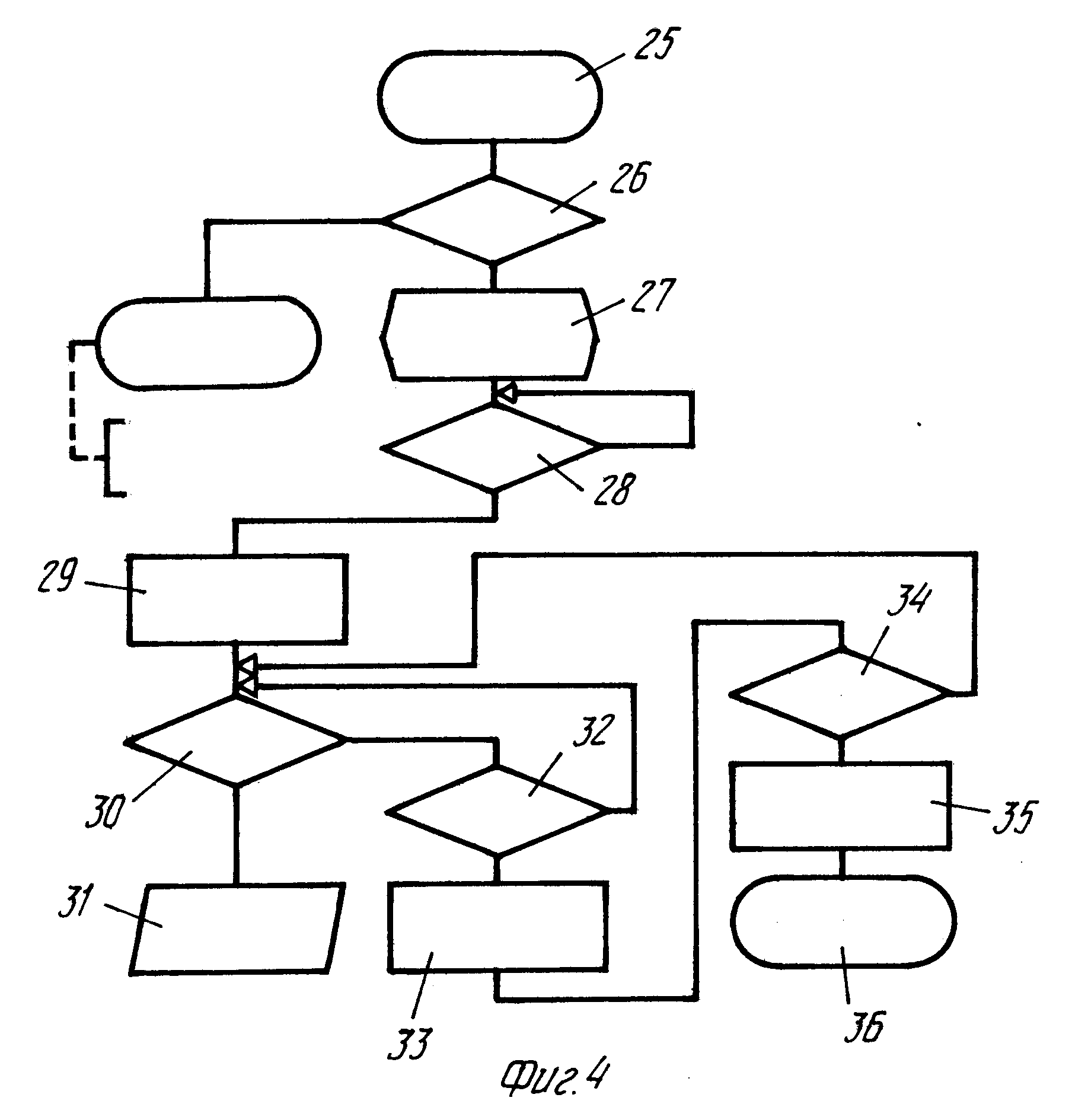
Как показано на фиг. 4, инициирование системы обеспечивается в процессе реализации фазы 25. Она сразу же сопровождается фазой обнаружения подачи питания в контур управления средствами движения поезда (фаза 26).
Если ответ оказывается отрицательным, то инициирование невозможно, что означает
что
поезд
находится на пути, на который не подается электропитание;
что соответствующий цвет сигнального семафора является красным;
что соответствующий контур не находится под
напряжением (не
возбужден).
Если ответ положительный, то дается разрешение на отправление поезда без проведения инициирования системы устройства ( см. фазу 27).
Поскольку дано разрешение на отправление поезда, то необходимо проверить в течение фазы 28, находится ли поезд в состоянии ожидания, герметично ли закрыты все двери вагонов и приведена ли в действие система ограничения (cerclo).
При несоблюдении этих требований они должны быть выполнены в процессе повторения фазы 28.
При констатации же их выполнения переходят к реализации фазы 29 открытия "окна" интервала надежности согласования соответствующих сигналов, соответственно заложенных в программе ЗУ устройства и реально происходящих в процессе движения поезда по дорожному участку пути.
На протяжении фазы 30 определяется возможно превышение длины (заранее определенной) "окна".
Если устанавливается факт такого превышения, то это говорит о неудачной реализации инициирования устройства и необходимости экстренного торможения поезда (фаза 31).
Если же длина этого "окна" не превышается, то переходят к фазе 32 контроля считывания сигналов описания расстановки или положения вех.
Если такое считывание выполнять невозможно, то переходят к фазе 33 постепенного обнаружения кода участка дороги.
Затем во время реализации фазы 34 определяют конец репера идентификации входа в данный дорожный участок.
Если устанавливается, что этот репер не был пройден, возвращаются к выполнению фазы 30 определения превышения заранее определенной длины "окна" (интервала), в котором обеспечивается надежное согласование сигналов программы ЗУ и действительно имеющих место при движении поезда.
Если устанавливается, что репер идентификации пройден, то в процессе реализации фазы 35 определяется следующее положение сигналов:
сигнал описания
программы движения 0,
сигнал устройства возврата в нулевое положение (RAZ) описания программы движения 0,
сигнал положения вех на земле 0,
сигнал устройства возврата в
нулевое положение (RAZ)
регистра сдвига, связанного с цепью обнаружения вех на земле 0.
Это означает, что программа движения поезда по маршруту, заложенная в память ЗУ 9 (фиг. 1), и приборы (цепи, контуры) считывания расположения вех, установленных вдоль железнодорожного полотна, находятся в их начальном состоянии.
Во время фазы 36 появляется индикация, показывающая, что система инициирована.
После этого переходят в соответствии со схемой, изображенной на фиг. 5, к фазам обнаружения вех или других двухгранных углов (1).
Для обнаружения вехи на земле с помощью локатора Допплера 3 необходимо прежде всего убедиться во время фазы 40 в том, что система инициирована.
При отрицательном ответе возвращаются к операциям инициирования, описанным со ссылкой на фиг. 4.
При положительном ответе переходят к фазе 41 анализа сигнала описания программы движения и расстановки вех.
Если сигнал описания не равен 1, то сигнал устройства (RAZ) цепи обнаружения вех равен 1, как это указано в фазе 42.
Если сигнал описания равен 1, при сигнале положения вех на земле, равном 1, как это констатируется в фазе 43, переходят к фазе 44 открытия "окна" спектра допускаемого расхождения родственных по природе сигналов.
Если во время реализации фазы 45 устанавливается, что длина "окна" согласования сигналов оказывается превышенной, то это означает отсутствие когерентности сигналов и необходимость применения экстренного торможения поезда во время фазы 45.
Если оказывается, что длина "окна" не превышена, то определяют во время фазы 47 условие равенства единице сигнала (RAZ) обнаружения вех на земле.
Если же это условие не выдерживается, то возвращаются к реализации фазы 45 определения превышения длины "окна" интервала когерентности сигналов.
Если же это условие соблюдается, то переходят к фазе 48 возврата сигнала в нулевое положение (RAZ=0) сигнала обнаружения вех на земле, а затем к фазе 49 отключения.
Считывание сигналов в кодовой форме расположения вехи или двухгранного угла, заложенных в программе, хранящейся в ЗУ 9 (фиг. 1), проведем со ссылкой на схему, показанную на фиг. 6.
Во время фазы 51 убеждаются, что сигнал положения вех на земле равен 1.
Если это условие не выполняется, то сигнал органа возврата в нулевое положение регистра сдвига, связанного с цепью описания в кодовой форме расположения вех на земле, равен 1, как это констатируется в фазе 52.
Если же оно выполняется, то сигнал описания программы движения (положения вех) равен 1, как об этом свидетельствует фаза 53 и как это имеет место во время фазы 54, и производят открытие пространственного "окна" спектра допускаемого расхождения родственных по природе сигналов.
Если во время реализации фазы 55 устанавливается, что длина "окна" превышается, то это означает отсутствие когерентности сигналов и необходимость применения экстренного торможения поезда во время фазы 56.
Если же длина "окна" не превышается, то определяют во время фазы 57 состояние сигнала устройства возврата в нулевое положение описания программы движения (расположения вех).
Если это состояние не равняется единице, возвращаются к фазе 55 определения состояния превышения длины "окна" интервала надежности когерентности сигналов.
Если же это состояние равно 1, то возврат в нулевое положение описания переходит к нулю, как это указывает фаза 58, и в конце фазы 59 происходит возврат к отключенному состоянию.
Процедура трогания поезда с места описывается со ссылкой на схему, изображенную на фиг. 7.
Прежде всего, на протяжении фазы 61 убеждаются, что поезд находится в состоянии готовности (система, обеспечивающая его надежное и безопасное движение).
При отрицательном ответе возвращаются к проведению операций инициирования, описанных со ссылкой на фиг. 4.
При положительном ответе приступают к реализации фазы 62 нормального разрешения на отправление поезда с инициированной системой устройства, обеспечивающего безопасное движение.
Во время фазы 63 определяется состояние готовности поезда перед его отправлением.
Если поезд стоит с герметично закрытыми дверями и с приведенной в рабочее состояние системой ограничения (cerolo), переходят к фазе 64 определения положения поезда на пути, находящемся под напряжением.
Если поезд находится на правильном положении проверяют во время фазы 65 подачу тока на эту ветку.
При положительном ответе поезду во время фазы 66 дается разрешение на отправление.
При отрицательном ответе возобновляют проведение фазы 65.
Одновременно возможно ожидание снятия красного света семафора, запрещающего движение.
Если поезд не находится на пути, электрическая цепь которого замкнута, ему дается разрешение на отправление во время фазы 66; могущее иметь место в какой-то определенной точке дорожного участка пути.
Система когерентности, которая только что описана, контролирует также точность и отклонение регистраций локатора, фиксирующего пройденный интервал пути, поскольку любое изменение измеренного интервала порождает потерю синхронизации.
Эта система когерентности позволяет гарантировать с точностью и надежностью положение поезда на железнодорожном пути при каждой новой обнаруженной вехе.
Тем не менее, предельно разрешенная скорость движения поезда всегда представляется через расстояние между двумя следующими друг за другом вехами.
Использование ЭВМ и запоминающего устройства для хранения кодовой информации позволяет помещать программу контроля и регулирования скорости в кабине машиниста поезда.
Вехи, установленные на земле вдоль железнодорожного пути, располагаются таким образом с постоянными интервалами друг от друга точно так же, как и фиктивные вехи, описанные в программе, заложенной в память ЗУ.
Дополнительные вехи, обеспечивающие контроль скорости, описываются только в программе, заложенной в ЗУ. Они размещаются между "сложными" вехами и выделяются специальным репером для того, чтобы не быть принятыми во внимание системой когерентности.
Устройство, выполненное согласно изобретению, обладает более высокой гибкостью функционирования по сравнению с известными подобными устройствами, поскольку она позволяет изменять программу контроля скорости движения поезда независимо от той программы, которая заложена в ЗУ 9 (фиг. 1) и составлена по "ложным" вехам, определяющим предписанные скорости по участкам дороги.
Следовательно, можно двигаться или обеспечивать движение поезда по одному и тому же пути движения поездов, имеющему различные эксплуатационные характеристики и в связи с этим различные контроля и регулирования скорости.
Расстояние между двумя расположенными на земле вехами определяет время "покоя" устройства.
Точность определения положения поезда на дорожном участке и, следовательно, точность в части контроля и регулирования скорости его движения зависят от расстояния между двумя последовательно расположенными вехами. ЫЫЫ6
Реферат
Использование: для автоматического контроля скорости, остановки и обеспечения эффективного и безопасного управления движением транспорта, в частности железнодорожного. Сущность изобретения: устройство имеет связь с железнодорожным путем, вдоль полотна которого расставлены вехи 1 с постоянными или произвольно выбранными интервалами между собой, на входе каждого дорожного участка вехи 2, расположенные таким образом, чтобы они образовывали репер идентификации (опознавания) дорожного участка и инициирования устройства, при этом средства обработки сигналов, выданных средствами обнаружения вех, имеют в своем составе блок хранения программы движения поезда в форме кодов и узел когерентности (связи) 8 с безопасным "окном" спектра разделения сигналов, систему контроля превышения скорости 10, предназначенную для управления органами экстренного торможения поезда, если указанные сигналы разделяются друг от друга на расстояние, превышающее длину вышеуказанного "окна" спектра безопасного расхождения этих сигналов. 2 з.п.ф-лы, 7 ил.
Комментарии