Приводная система электрического транспортного средства - RU2060173C1
Код документа: RU2060173C1
Чертежи






Описание
Изобретение относится к тяговому приводу транспортного средства и касается приводной системы, при которой определяются правая и левая стороны относительно прямолинейного направления движения и используются по меньшей мере один первый асинхронный электродвигатель, обеспечивающий управление первого колеса, находящегося с правой стороны транспортного средства, и один второй асинхронный электродвигатель, обеспечивающий управление второго колеса, находящегося с левой стороны транспортного средства.
Известна приводная система электрического транспортного средства (патент ФРГ 4011291, кл. В 60 L 15/00, 1991), содержащая по меньше мере один привод колеса, находящегося с правой стороны транспортного средства, и другой привод колеса, находящийся с левой стороны транспортного средства. Питание каждого из этих приводов обеспечивается собственным вторичным приводом, определяющим установленное правилами значение мощности, передаваемой на соответствующее колесо, либо угловой скорости этого колеса. Вторичные приводы затем соединяются с главным приводом, предназначенным обеспечивать однородность в управлении разных приводов таким образом, чтобы режим работы каждого привода был связан с режимом работы других приводов в зависимости от условий движения транспортного средства.
Такая приводная система имеет множество недостатков. Во-первых, все разные вторичные приводы и центральный привод, предусмотренные в этой приводной системе, являются дорогими. Во-вторых, такая приводная система, в которой центральный привод предназначен посылать особые команды в каждый из вторичных приводов, предусмотренных для обеспечения питания привода, обладает большим риском создать соответствующую неустойчивость на дороге во многих ситуациях. Многие команды этой системы образуют инерционные фильтры, которые в значительной степени уменьшают, когда один привод оказывается мгновенно в чрезвычайной ситуации, возможность для других приводов в тот же миг реагировать соответственно, чтобы обеспечит хорошее движение транспортного средства. Следовательно, такая система обладает ограниченной гибкостью и слабой способностью мгновенной реакции, что делает ее неэффективной и даже непригодной для многих ситуаций движения, которые могут возникнуть.
Задачей изобретения является создание системы с большой гибкостью применения и обладающей хорошими дорожными характеристиками.
Другой задачей изобретения является создание приводной системы, которая обеспечивала бы хороший энергетический КПД и оптимальную эксплуатацию применяемых приводов.
Таким образом, предметом изобретения является приводная система транспортного средства электрического типа, содержащая по меньшей мере два асинхронных электродвигателя, каждый из которых соединен только с одним соответствующим колесом транспортного средства и имеет статорную обмотку, приводимую в действие с целью образования магнитного поля, вращающегося на статорной частоте в ответ на переменный ток питания, подаваемый на статорную обмотку источником питания под переменным напряжением, определяющим частоту питания, а также ротор, магнитно связанный с названной статорной обмоткой, и вращающийся частотой, величина которой зависит от величины вращающегося магнитного поля.
Предложенная приводная система отличается тем, что роторная частота каждого из асинхронных электродвигателей измеряется соответствующим блоком измерения и подается на электронный блок обработки измерительных сигналов. Этот блок, являющийся узлом выделения максимальной роторной частоты вращения, подает на выход, связанный с основным входом узла управления, частотный сигнал, который среди измеренных роторных частот является представляющим максимальную роторную частоту.
Узел управления направляет к источнику питания первый сигнал управления в ответ на указанный частотный сигнал. Первый сигнал управления определяет для каждого из электродвигателей одно и то же значение для частоты питания. Это значение частоты питания определяет для статорной частоты каждого из электродвигателей одно и то же результирующее значение, и узел управления приводится в действие таким образом, чтобы результирующее значение было больше величины частотного сигнала, которое служит для регулирования этого результирующего значения, когда в приводной системе усиливается темп движения.
Из этих характеристик следует приводная система, содержащая узел управления общего источника питания, служащего для питания, по меньшей мере двух асинхронных электродвигателей, причем каждый из этих электродвигателей связан с одним соответствующим колесом. Затем, когда работа этой приводной системы усиливается, обеспечивается для всех электродвигателей один режим работы, так как при любых дорожных условиях, например при виражах или на дороге, имеющей неровности поверхности, скольжение всегда будет позитивным для каждого из этих электродвигателей.
Более того, если колесо получает ускорения из-за потери сцепляемости, силовой момент, появляющийся на этом колесе уменьшается, так как мгновенно уменьшается скольжение за счет интервала времени реакции, необходимого для блока измерения роторной частоты узла управления и источника питания. В последнем случае колесо сразу же теряет скорость и возвращается в ситуацию сцепления с покрытием. Таким образом, наблюдается саморегулирование условий сцепляемости для всех колес транспортного средства, соединенных соответственно с одним из электродвигателей до тех пор, пока по меньшей мере одно колесо выполняет это условие сцепления. Следует также заметить, что при мгновенной потере сцепления колеса его частота не превысит частоту вращения вращающегося магнитного поля, поскольку за пределом этой частоты вращения электродвигатель, связанный с этим колесом, перейдет в режим торможения.
Согласно другой характеристике изобретения, узел управления приводится в действие так, чтобы результирующее значение статорной частоты каждого из электродвигателей было меньше значения частотного сигнала, который служит для регулирования этого результирующего значения, когда включается режим торможения.
Режим торможения дополнительно обладает свойствами режима движения и обеспечивается тем же самым узлом управления. Факт регулирования результирующего значения статорного частоты в режиме торможения с помощью максимальной роторной частоты приводит к эффективному торможению, мешающему блокировке колес. Если при торможении одно колесо срывается, его скорость может лишь уменьшится, и силовой момент, прикладываемый к этому колесу, также уменьшается. Вследствие этого колесо снова сцепляется с покрытием и получает свою нормальную скорость качения. Таким образом, передаваемый на колеса максимальный силовой момент торможения остается постоянно обеспечивающим хорошее сцепление с покрытием.
Следует отметить, что в конце торможения первый сигнал управления в любое время соответствует позитивной частоте.
Согласно конкретному примеру исполнения изобретения, предусматривается двигательная система, влючающая только два асинхронных электродвигателя, причем оба эти двигателя соответственно соединены с одним колесом, находящимся с одной и с другой стороны транспортного средства. Можно также получить транспортное средство с передней тягой или с задней тягой.
Согласно другому примеру исполнения изобретения предусмотрено, что каждое из колес транспортного средства, обородованного двигательной системой, соединено с соответствующим асинхронным электродвигателем.
Здесь следует отметить, что можно по разному выбирать размеры электродвигаталей, находящихся впереди транспортного средства, и электродвигателей, находящихся в задней части транспортного средства, так, чтобы механическая мощность, выдаваемая электродвигателями, находящимися впереди, была бы больше или меньше механической мощности, выдаваемой электродвигателями, находящимися сзади.
Согласно еще одному примеру изобретения предусматривается, что все электродвигатели двигательной системы соединены с одним и тем же источником питания, который параллельно питает эти электродвигатели, подавая основной переменный ток питания.
Из этой характеристики следует снижение стоимости приводной системы согласно изобретению. Более того, это решение также вносит электрические преимущества, особенно в случае, когда источник энергии образован аккумуляторной батареей.
Согласно другим характеристикам предложенной приводной системы амплитуда напряжения питания определяется величиной второго сигнала управления, причем первый сигнал управления подается на первый вход источника питания контуром регулирования частоты питания, а второй сигнал управления на второй вход источника питания контуром регулирования амплитуды питания.
Оба контура регулирования входят в узел управления и приводятся в действие так, что при любом значении статорной частоты амплитуда питания способна изменяться в зависимости от регулирующего сигнала между минимальным значением и максимальным значением, определяемым для каждого значения статорной частоты, и система максимальных значений определяет предельную кривую напряжения, а частота питания регулируется так, чтобы при любом значении статорной частоты разность между этой статорной частотой и максимальной роторной частотой вращения сохранялась бы строго постоянной, пока амплитуда питания имеет значение ниже максимального значения, установленного для этого значения статорной частоты. Оба контура регулирования приводятся в действие, чтобы разность частот могла увеличиваться в абсолютном значении в зависимости от регулирующего сигнала, когда при любом значении статорной частоты амплитуда питания имеет значение, равное максимальному значению для этого значения статорной частоты.
Из этих характеристик следует приводная система, в которой амплитуда напряжения питания может изменяться независимо от частоты питания, что приводит к широкому диапазону возможных режимов работы для используемых электродвигателей. Можно изменять при данной максимальной роторной частоты вращающий момент, подаваемый электродвигателями на транспортное средство, изменяя, во-первых, амплитуду напряжения питания, и, во-вторых, значение статорной частоты и следовательно скольжения.
Таким образом, можно получить относительно оптимальное использование электродвигателей приводной системы, согласно изобретению, по всему диапазону работы. Отмечается, что оптимальный КПД достигается при строго постоянной разности частоты между статорной частотой и роторной частотой электродвигателя, какими бы ни были роторная частота и амплитуда напряжения питания, поскольку эта последняя создает магнитный поток, проходящий через обмотку ротора, достаточно удаленный от потока насыщения этого привода. Величина разности частоты, приводящая к оптимальному КПД двигательной системы, определяется в зависимости от характеристик применяемых асинхронных электродвигателей.
Из этих характеристик следует также возможность увеличивать значения мощности, подаваемой на электродвигатели до предельного значения, при котором потенциал приводов эксплуатируется на максимуме. Так, поскольку можно изменять амплитуду напряжения питания в зависимости от требуемого силового момента, предельная кривая напряжения может находиться относительно рядом с магнитным насыщением электродвигателей и, увеличивая скольжение, силовой момент увеличивают до тех пор, пока значение этого скольжения находится в рабочем диапазоне электродвигателей.
Согласно еще одной конкретной характеристике изобретения, приводная система содержит датчик для измерения основного тока питания, подаваемого источником питания на электродвигатели.
Согласно еще одной конкретной характеристике изобретения, приводная система содержит датчик для измерения основного тока питания, подаваемого источником питания на электродвигатели. Этот датчик передает сигнал, представляющий либо амплитуду, либо силу основного тока питания на блок, производящий регулирующий сигнал двигательной системы. Регулирующий сигнал определяется так, чтобы величина сигнала измерения основного тока питания была бы равна величине сигнала, установленного правилами и посылаемого также в блок, производящий регулирующий сигнал.
Из этой конкретной характеристики следует приводная система, в которой основной ток питания регулируется в зависимости от сигнала, устанавливаемого правилами и поступающего, например, от привода запуска или привода торможения транспортного средства. Общий силовой момент, посылаемый на валы электродвигателей, также контролируется сигналом, устанавливаемым правилами, причем этот общий силовой момент является функцией основного тока питания, посылаемого на электродвигатели.
Согласно конкретному примеру исполнения изобретения, предусматривается использование приводной системы в режиме запуска и в режиме торможения. Для этого предусмотрены привод запуска и привод торможения, посылающие соответственно сигнал запуска и сигнал торможения на отборочный орган. Этот отборочный орган приводится в действие для подачи на его выход сигнала, который имеет значение, соответствующее значению сигнала запуска, когда сигнал торможения имеет нетормозное значение, и значению сигнала торможения, когда величина этого последнего отличается от нетормозного значения.
Из конкретного примера исполнения изобретения следует приводная система, обеспечивающая усиление режима запуска и режима торможения транспортного средства, с которым она соединена. Более того, тормозной привод всегда имеет приоритет над приводом запуска, что гарантирует дорожную безопасность в случае одновременных противоречивых команд.
На фиг.1 представлена схема первого примера исполнения приводной системы согласно изобретению, причем система включает два асинхронных электродвигателя с параллельным питанием; на фиг.2 характеристика питания асинхронных электродвигателей, включенная в первый пример исполнения двигательной системы согласно изобретению; на фиг.3 характеристика, определяющая нормализованную амплитуду напряжения питания в зависимости от сигнала, представляющего результирующую частоту, определяющую частоту питания; на фиг.4 характеристика, определяющая коэффициент усиления нормализованной амплитуды напряжения питания в зависимости от регулирующего сигнала; на фиг.5 характеристика, определяющая переменную разность частоты между вращающимся статорным магнитным полем и максимальной роторной частотой вращения в зависимости от регулирующего сигнала в случае первого примера исполнения согласно изобретению; на фиг. 6 пример исполнения блока, производящего регулирующий сигнал в случае первого примера исполнения согласно изобретению; на фиг.7 схема второго примера исполнения двигательной системы согласно изобретению; на фиг.8 характеристики, определяющие переменную разность частоты между статорным магнитным полем и максимальной роторной частотой вращения в зависимости от регулирующего сигнала в случае второго примера исполнения согласно изобретению; на фиг. 9 характеристика, обеспечивающая коррекцию сигнала управления амплитуды напряжения питания в зависимости от уровня напряжения аккумуляторной батареи, используемой в качестве источника энергии.
Приводная система (фиг.1) содержит источник питания 2, называемый в дальнейшем центральное электропитание, питающее параллельно первый асинхронный электродвигатель М1 и второй асинхронный электродвигатель М2.
Каждый из электродвигателей М1, М2 содержит статор S1, S2, имеющий статорную обмотку В1, В2 и ротор R1, R2, имеющий роторную обмотку, замкнутую на нем самом. Центральное электропитание приводит основной электрический ток питания IAL, переменный и многофазный, под напряжением питания, имеющим амплитуду питания UAL и частоту питания FAL. Ток питания IAL образуется суммой тока питания первого электродвигателя IM1 и тока питания второго электродвигателя IM2.
Статорная обмотка В1, В2 приводится в действие таким образом, чтобы указанный ток питания IM1, IM2 соответствующего привода, циркулирующий в этой статорной обмотке, создавал вращающееся магнитное поле СМ1, СМ2 со статорной частотой FST в зоне соответствующего ротора, причем последний имеет роторную частоту вращения FRT1, FRT2, зависящую от вращающегося магнитного потока и от нагрузки.
Каждый электродвигатель М1, М2 соединен только с одним соответствующим колесом транспортного средства, имеющего этот первый пример исполнения двигательной системы изобретения. Частота вращения каждого колеса есть линейная функций роторной частоты FRT1, FRT2 соответствующего ротора R1, R2.
Когда ротор R1, R2 имеет частоту вращения FRT1, FRT2, отличающуюся от частоты вращения FST вращающегося магнитного поля СМ1, СМ2, поток этого магнитного поля, который проходит через обмотку, индуцирует в этой обмотке наведенное напряжение, возбуждающее в ней наведенный электрический ток. В этом случае, ротор подвергается электромагнитному воздействию в результате взаимодействия между вращающимся магнитным полем СМ1, СМ2 и электрическим током, наведенным в роторной обмотке, который создает на выходном валу электродвигателя М1, М2 силовой момент. При таком асинхронном электродвигателе можно определять скольжение S, равное относительной разности частоты вращения магнитного поля и частоты вращения ротора.
Пpи данных статорной частоте FST и амплитуде напряжения питания наблюдается увеличение тока питания, когда увеличивается скольжение S, а также увеличение силового момента, когда скольжение изменяется между нулевым значением и значением опрокидывания, при котором достигается максимальный силовой момент. Диапазон значений скольжения, заключенный между нулевым значением и значением опрокидывания, определяет рабочий диапазон привода при этой статорной частота FST и этой амплитуде питания.
С другой стороны, при статорной частоте FST и заданном скольжении S наблюдается увеличение силового момента, когда амплитуда питания увеличивается, пока электродвигатель не достигнет магнитного насыщения.
В первом примере исполнения двигательной системы (фиг.1) были предусмотрены блоки измерения 10 роторной частоты FRT1, FRT2 каждого ротора R1, R2. Эти блоки 10 посылают на узел 4 выделения максимальной роторной частоты (узел обработки) измерительные сигналы первого сигнала MFR1, представляющего роторную частоту FRT1 первого электродвигателя М1 и сигнал MFR2, представляющий роторную частоту FRT2 второго электродвигателя М2.
Центральное электропитание 2 и узел 4 обработки соединены с узлом 6 управления. Узел обработки 4 приводится в действие так, чтобы подавать на выход 4а сигнал SFМX, представляющий максимальную роторную частоту между роторной частотой FRT1 первого электродвигателя М1 и роторной частотой FRT2 второго электродвигателя М2. Этот сигнал SFMX подается на основной узел управления, а именно на вход 11а сумматора 11. Узел 6 управления приводится в действие для подачи на первый вход 12 центрального электропитания первого сигнала управления SCF частоты питания FAL и подачи на второй вход 14 этого центрального питания 2 второго сигнала управления SCA амплитуды напряжения питания UAL.
Узел управления 6 содержит блок 20 образования регулирующего сигнала SRG, подаваемого на выход 20а. Вход 20б блока 20 соединен с датчиком 22 основного тока питания IAL, который подает ему измерительный сигнал SM1 основного электрического тока питания. Другой вход 20с этого блока 20 соединен с контрольным блоком 24, который посылает ему контрольный сигнал SCS. Блок 20, производящий регулирующий сигнал SRG, приводится в действие для образования этого регулирующего сигнала SRG в зависимости от сигналов SM1 и SCS, поступающих в этот блок.
Регулирующий сигнал SRG передается на вход 30а функционального преобразователя 30 переменной разности частот (регулирующего блока разности частоты вращения между статорной частотой FST и максимальной роторной частотой FRM), а также на вход 32а блока 32 определения коэффициента передачи (усиления) САР, подаваемого на выход 32б блока 32.
Блок 30 подает на выход 30б сигнал DVA, представляющий переменную разность частоты, этот сигнал DVA передается на вход 11б сумматора 11. Вход 11с сумматора связан с блоком 36 образования фиксированной разности частот, включаемым для производства сигнала DF1, представляющего фиксированную разность частот. Сумматор 11 складывает сигналы FMX, DVA и DF1, передаваемые на его входы 11а, 11б и 11с для подачи на свой выход 11д сигнала SFRS, соответствующего результирующей частоте. Этот сигнал SFRS служит для формирования первого сигнала управления SCF частоты питания FAL. Затем сигнал SFRS, передаваемый на выход 11д сумматора 11, направляется на вход 40а блока питания 40, в котором в память записывается кривая напряжение частота 42, изображенная на фиг.3.
Блок 40 включается в действие для подачи на свой выход 40б нормализованной амплитуды напряжения UNO в зависимости от сигнала SFRS, поступающего на его вход 40А.
Сигнал UNO, выходящий из блока 40, и сигнал САР, поступающий с блока 32, соответственно передаются на вход 42а и на вход 42б блока умножения 42, в котором оба эти сигнала САР и UNO умножаются. Результат этого умножения подается на выход 42с блока 42 для формирования второго сигнала управления SCA амплитуды напряжения питания UAL.
Следует заметить, что усилитель 46 предусмотрен на электрическом пути 48, связывающем сумматор 11 с центральным питанием 2 в том случае, когда число пар полюсов статорных обмоток В1, В2, предусмотренных одинаковыми, отличается от 1. Если число пар полюсов статорных обмоток В1 и В2 определяется переменным Р, обеспечено получение синхронной частоты вращения ротора, уменьшенной на коэффициент 1/Р, что в этом случае эквивалентно электродвигателю, имеющему только одну пару магнитных полюсов и статорную частоту FST FAL/P.
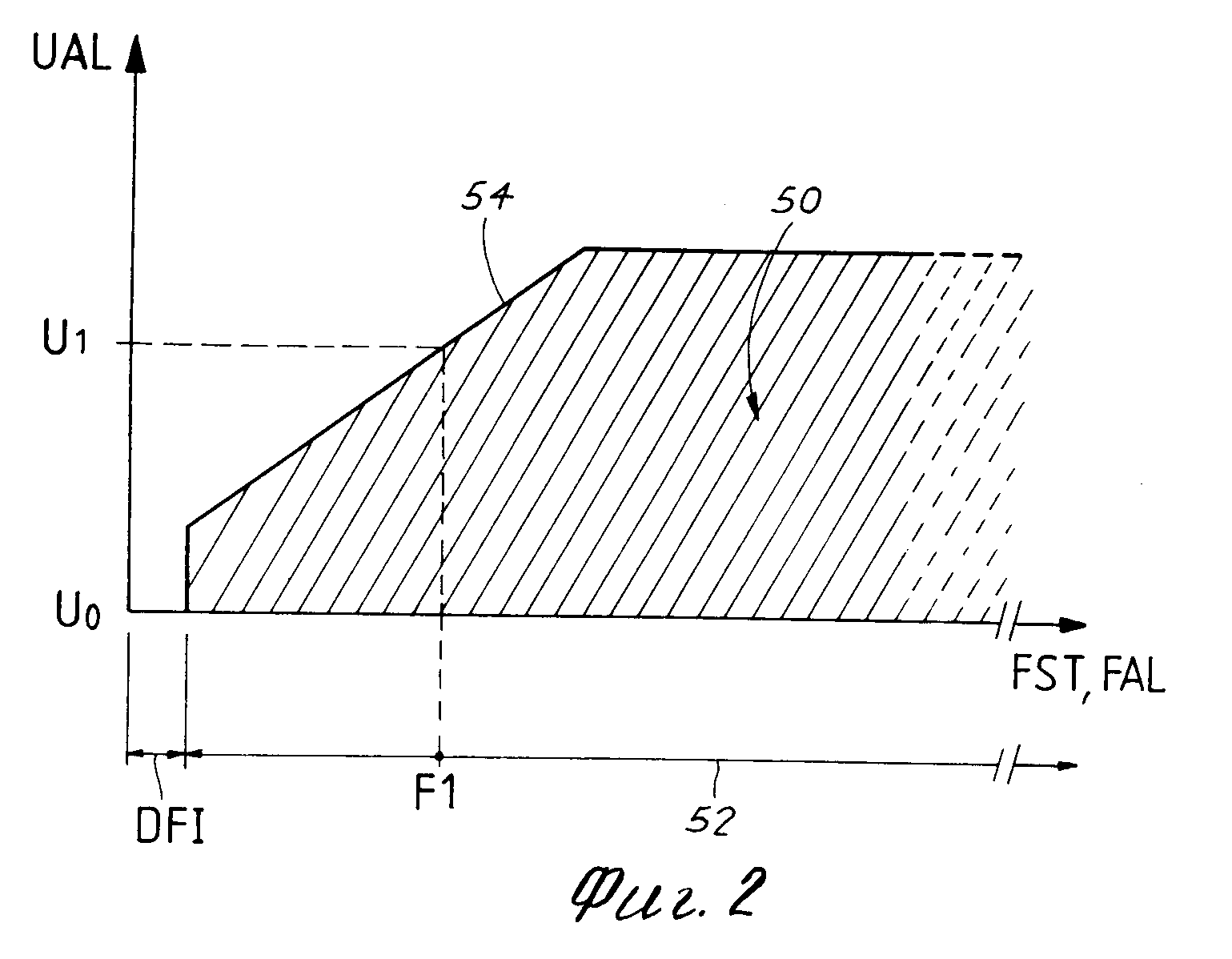
На фиг. 2 показана область 50 питания напряжением электродвигателей М1, М2, энергия на которые подается от центрального электропитания 2. Область питания напряжением представлена графиком, представляющим амплитуду UAL напряжения питания в зависимости от статорной частоты FST, причем значение этой последней представляет целое кратное число значения частоты FAL напряжения питания. Совокупность значений, которые может принимать статорная частота FST, определяет диапазон 52 значений частоты, доступных для этой статорной частоты FST.
При любой величине частоты F1, входящей в диапазон величин 52, амплитуда напряжения питания UAL может изменяться в пределах между минимальной величиной UO и максимальной величиной U1, причем эти значения конкретно ограничены для каждого значения частоты F1 указанного диапазона 52. Совокупность максимальных значений U1 определяет предельную кривую напряжения 54.
Узел управления 6 приводной системы приводится в действием с тем, чтобы, во-первых, статорная частота FST, значение которой определяется значением результирующей частоты FRS, была бы равна сумме максимальной роторной частоты FMX и фиксированной разности частот DF1, пока амплитуда UAL напряжения питания имеет значение менее максимального значения U1 для этой статорной частоты FST, что соответствует нулевому значению для переменной разности частоты DVA, и чтобы, во-вторых, переменная разность частот DVA могла принимать значения более нуля, когда амплитуда UAL напряжения питания равна максимальному значению U1, относящемуся к предельной кривой напряжения 54.
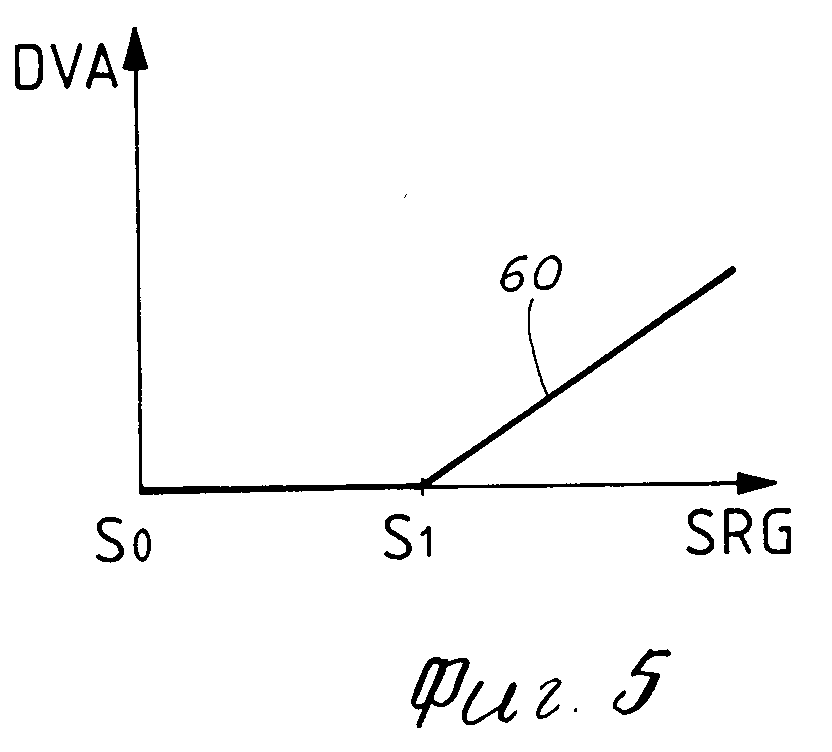
Описанный выше принцип питания достигается, в частности, благодаря передаточной функции функционального преобразователя 30, определяемой кривой 60, представленной на фиг.5, передаточной функцией блока памяти 40, определяемой нормализованной кривой напряжение частота 42, представленной на фиг.3, и передаточной функцией блока управления 42, определяемой характерной кривой 62, представленной на фиг.4.
На фиг. 4 и 5 видно, что значение переменной разности частот DVA фиксируется на нуле, пока регулирующий сигнал SRG имеет значение ниже установленного S1. С другой стороны, коэффициент усиления САР увеличивается линейно в зависимости от регулирующего сигнала SRG между начальным значением SO и значением S1. Однако можно предусмотреть, чтобы переменная разность частот увеличивалась незначительно в зависимости от регулирующего сигнала SRG между значениями S0 и S1.
При величине S1 коэффициент усиления САР достигает своего максимального значения С1. Когда регулирующий сигнал SRG сильнее S1 коэффициент усиления сохраняет максимальное значение С1. Это коэффициент С1 определяется для того, чтобы нормализованная кривая 42 напряжение частота (фиг.3), умноженная на коэффициент С1, давала предельную кривую напряжения 54, которая определяется заранее в зависимости от характеристик и размеров используемых асинхронных электродвигателей.
С другой стороны, когда регулирующий сигнал SRG больше S1, переменная разность частот DVA принимает значения более нуля, как это представлено на фиг.5. Переменная разность частот DVA больше нуля, когда регулирующий сигнал SRG больше S1 для режима запуска SPP двигательной системы и линейно возрастает с регулирующим сигналом SRG.
Таким образом, пока регулирующий сигнал SRG имеет значение ниже значения S1, результирующая частота FRS, значение которой соответствует значению первого сигнала управления SCF напряжения питания, точно соответствует максимальной роторной частоте FMX, к которой добавляется фиксированная разность частот DF1, определяемая заранее и соответствующая оптимальному режиму почти по всему диапазону питания 50 применяемых асинхронных электродвигателей.
Здесь следует отметить, что можно слегка и постепенно увеличивать разность частот между значениями S0 и S1 регулирующего сигнала SRG с целью обеспечения абсолютно оптимального режима по всей области питания 50.
Затем в соответствии со значением, придаваемым регулирующему сигналу SRG между исходным значением S0 и значением S1, второй сигнал управления SCA амплитуды питания UAL, передаваемый блоком 42 на центральное электропитание 2, может изменяться при каждом значении результирующей частоты FRS между минимальным значением U1 и максимальным значением U2, относящимся к предельной кривой напряжения 54.
С другой стороны, когда регулирующий сигнал SRG имеет значение выше значения S1, разность частоты между статорной частотой FST и максимальной роторной частотой FMX увеличивается со значительным увеличением в этом случае величины сигнала DVA, представляющего переменную разность частот.
Нужно заметить, что предпочтительным образом переменная разность частот DVA удерживается постоянной, когда она достигла заданного максимального значения, т. е. начиная с определенного значения регулирующего сигнала, увеличение этого регулирующего сигнала не вызывает больше увеличения переменной разности частот DVA.
При значении регулирующего сигнала SRG, большем значения S1, коэффициент усиления САР сохраняет постоянное значение С1. В результате этого второй сигнал управления SCA амплитуды UAL напряжения питания представляет значение предельной кривой напряжения 54 при любом значении результирующей частоты FRS.
Наконец, амплитуда питания UAL напряжения питания возрастает при максимальной заданной частоте вращения FMX, между минимальной величиной U0 и максимальной величиной U1, заданной для статорной частоты FST, равной этой максимальной роторной частоты FMX, к которой была добавлена оптимальная фиксированная разность частот DF1, когда регулирующий сигнал увеличивается между первоначальным значением SO и значением S1. Допустим, что максимальная роторная частота FMX остается постоянной и что величина регулирующего сигнала продолжает возрастать выше значения S1, разность между статорной частотой FST и максимальной роторной частотой FMX возрастает значительным образом. Это соответствует увеличению скольжения электродвигателей и амплитуды UAL напряжения питания, при которой центральное электропитание 2 электродвигателей М1 и М2 принимает максимально возможное значение при данной величине результирующей частоты FRS, задаваемой первым сигналом управления SCF статорной частоты FST.
Пример выполнения блока 20, производящего регулирующий сигнал SRG, представлен на фиг.6. Контрольный сигнал SCS и сигнал SM1 измерения основного тока питания IAL вычитаются один из другого с помощью вычитателя. Результат вычитания в этом случае передается в регулятор 68 пропорциональным и интегральным действием. Сигнал, выходящий из регулятора 68, в частности сигнал напряжения, в этом случае представляет собой регулирующий сигнал SRG.
Следует также отметить, что первый пример исполнения двигательной системы, предназначенной для транспортного средства электрического типа и представленной на фиг. 1-6, может регулировать общий силовой момент, посылаемый асинхронным электродвигателями в транспортное средство благодаря измерению основного электрического тока питания IAL, действию контрольного блока 24 и блока 20, предназначенного производить регулирующий сигнал SRG. Изменяя величину контрольного сигнала SCS, узел управления 6 срабатывает так, что значение сигнала SМ1, соответствующее значению основного тока питания принимает значение, равное значению контрольного сигнала SCS.
Кроме того, приводная система, согласно этому первому примеру исполнения изобретения, гарантирует для каждого из используемых асинхронных электродвигателей режим, соответствующий режиму запуска, причем значение первого сигнала управления SCF для частоты питания FAL регулируется так, чтобы ее значение было бы всегда больше значения максимальной роторной частоты FMX. В конкретном случае, когда величина роторной частоты FRT1 первого электродвигателя М1 равна значению роторной частоты FRT2 электродвигателя М2, на оба электродвигателя подается напряжение питания, амплитуда UAL которого и частоты FAL регулируется для того, чтобы иметь высокий КПД по всему диапазону работы этих электродвигателей, а также для того, чтобы обеспечить мягкое и качественное использование применяемых электродвигателей.
В варианте исполнения этого первого примера можно получить особое электропитание для каждого из электродвигателей М1 и М2, причем каждое из этих питаний регулируется по частоте первым сигналом управления SCF и по амплитуде вторым сигналом управления SCA. В этом случае датчик 22 для измерения основного электрического тока питания IAL заменяется эквивалентным устройством, непосредственно измеряющим токи IM1 и IM2, питающие каждый из этих приводов М1 и М2, при этом сигнал измерения тока SM1 соответствует в этом случае сумме двух измеренных токов IM1 и IM2.
Ниже описан второй пример исполнения приводной системы согласно изобретению, изображенный на фиг.7-9.
Приводная система транспортного средства электрического типа, согласно второму примеру исполнения включает четыре электродвигателя М1, М2, М3 и М4, на каждый из которых параллельно подается энергия от центрального элекропитания 2, причем на каждый электродвигатель подается собственный переменный ток питания IM1, IM2, IM3 и IM4. Следует отметить, что все четыре электродвигателя, представленные на фиг.7, абсолютно подобны электродвигателям М1, М2, описанным в первом примере исполнения.
Блоки измерения 10 (обозначено только одно из этих средств) подают измерительные сигналы MFR1, MFR2, MFR3 и MFR4, причем каждый из этих сигналов соответственно представляет роторную частоту одного из четырех асинхронных электродвигателей. В этом случае сигнал SFMX, подаваемый на выход 4а узла выделения максимальной роторной частоты вращения (блока обработки) 4, представляет максимальную роторную частоту описанных здесь четырех электродвигателей. Следует заметить, что вообще, каким бы не было число электродвигателей, входящих в приводную систему согласно изобретению, сигнал, посылаемый на выход 4а блока обработки 4, соответствует максимальной роторной частоте совокупности используемых электродвигателей.
Датчики 72 температуры каждого из электродвигателей М1-М4 (обозначен только один из этих датчиков) посылают на блок обработки 4 измерительные сигналы МТ1, МТ2, МТ3 и МТ4, соответствующие значению температуры каждого из названных электродвигателей. Блок обработки 4 посылает на выход 4б сигнал STR, значение которого есть функция температурных значений, измеренных датчиками 72. Сигнал STR подается на вход 20'd блока 20'. Этот блок 20', производящий регулирующий сигнал SRG, приводится в действие с целью образования этого регулирующего сигнала SRG в зависимости от контрольного сигнала SCS, сигнала SM1, поступающего от датчика электрического тока основного электропитания IAL, и сигнала STR, причем этот последний дает информацию о температурном состоянии используемых электродвигателей.
Как и в первом примере исполнения, согласно изобретению, значение тока основного питания IAL регулируется в зависимости от контрольного сигнала SCS, причем сигнал STR, представляющий температурное состояние электродвигателей, служит параметром коррекции или ограничения контрольного сигнала SCS. Можно также в варианте второго примера исполнения производить регулирующий сигнал соответственно с первым примером исполнения, при этом значение этого сигнала регулирования затем адаптируется в зависимости от величины сигнала STR.
Основное электропитание 2 формируется аккумуляторной батареей 76 коммутатором мощности 78 и модулятором ширины импульса 80.
Первый и второй сигналы управления SCF и SCA подаются соответственно на входы 12 и 14 модулятора 80 ширины импульсов. В ответ на сигналы SCF и SCA модулятор 80 посылает в коммутатор мощности 78 сигнал SOF открытия и закрытия. Батарея 76 посылает ток IВ в коммутатор мощности 78 под уровнем напряжения UB. Разные элементы центрального электропитания 2, также обеспечивают управление независимо от амплитуды напряжения питания UAL и частоты питания FAL.
Батарея 76 посылает на блок 20, а также на контрольный блок 84 сигнал SUB, представляющий уровень напряжения этой батареи. Батарея 76 посылает также на блок 20 сигнал SIB, представляющий ток батареи IB, посылаемый на коммутатор мощности 78. Так батареи IB служит для формирования основного тока питания IAL, выходящего из коммутатора мощности 78. Блок 84 контроля напряжения обладает функцией передачи, такой, которая определяется характерной кривой 88, представленной на фиг.9. На фиг.9 изображен сигнал коррекции SCR, посылаемый на выход 84а блока 84 в зависимости от сигнала SUB, представляющего уровень напряжения батареи 76, посылаемого на вход 84б этого блока 84. Значение коррекции нулевое, когда уровень напряжения батареи равен номинальному напряжению UBN этой батареи.
Затем сигнал SCR передается на вход 42'а блока 42' умножения для производства второго сигнала управления SVА амплитуды напряжения питания UAL, а также на вход 90а сумматора 90, причем второй вход 90в этого сумматора соединен с блоком 32, который посылает ему сигнал, представляющий коэффициент передачи (усиления), как представлено на фиг.4. Результат сложения, осуществляемого сумматором 90, подается на выход 90с и определяет сигнал САС, представляющий коэффициент усиления после корректировки. Этот сигнал САС передается затем на вход 42'в блока 42'. Блок 42' приводится в действие с целью осуществления умножения между входом 42' а и входом 42'в, т.е. между сигналом, представляющим нормализованную амплитуду напряжения UNO, такую как показано на фиг.3, и сигналом, представляющим корректированный сигнал усиления, затем добавления результата этого умножения к значению сигнала SCR, посланного на вход 42'd этого блока 42'. Полученный конечный результат подается на выход 42'с и формирует второй сигнал управления SCA амплитуды напряжения питания UAL.
Контрольный блок 24 включает здесь привод 94 приведения в движение и тормозной привод 96. Привод 94 запуска посылает сигнал запуска SPP в отборочный орган 98. Тормозной привод посылает сигнал торможения SFN в отборочный орган 98. Последний приводится в действия так, чтобы на его выходе 98а вырабатывался бы контрольный сигнал SCS, соответствующий значению сигнала запуска SPP, когда величина тормозного сигнала SFN соответствует нетормозному значению двигательной системы этого второго примера исполнения. Напротив, орган 98 приводится в действие таким образом, чтобы контрольный сигнал SCS который он посылает на блок 20', соответствовал величине тормозного сигнала SFN, когда он имеет величину, отличающуюся от нетормозной величины. Тормозной привод 96 имеет приоритет над приводом запуска 94.
Отборочный орган 96 посылает на выход 98б сигнал режима работы SMO, который он передает на вход 30'с блока 30', а также на блок 36'. Этот сигнал SMO сообщает блокам 30' и 36' режим работы включенного двигателя, а именно, режим запуска PPS или режим торможения FRN. Режим запуска начинается, когда контрольный сигнал SCS соответствует сигналу включения SPP. Точно также режим торможения включается, когда контрольный сигнал SCS соответствует сигналу торможения SFN.
Когда включается режим запуска PPS, фиксированная разность частоты DF1, находящаяся в блоке памяти 36', имеет положительное значение. Наоборот, в случае, когда включается режим торможения, величина этой фиксированной разности частоты DF1 отрицательная. В предпочтительном варианте этого второго примера исполнения абсолютная величина фиксированной разности частоты DF1 идентична для обоих возможных режимов движения.
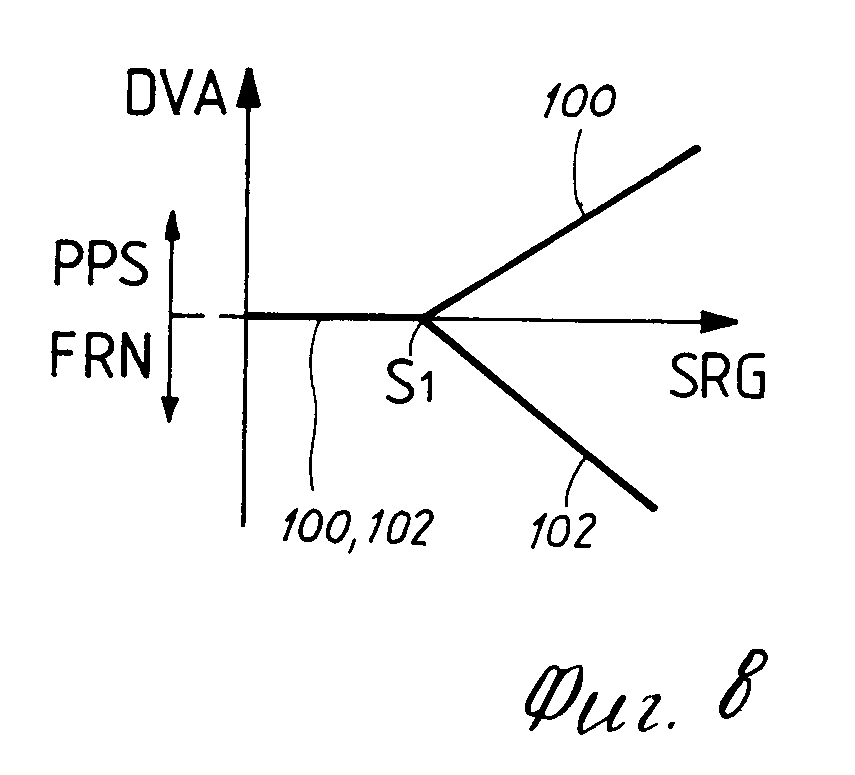
Равным образом, блок 30' приводится в действие для того, чтобы когда включается режим запуска PPS, переменная разность частот DVA, определяемая кривой 100 на фиг.8, принимала положительное значение, когда сигнал имеет величину более величины S1. Напротив, когда включается режим торможения FRN блок 30' включается в действие для коммутации на характерную кривую 102, представленную на фиг. 8, причем переменная результирующая разность частот DVA на этот раз становится отрицательной, когда величина регулирующего сигнала SRG больше, чем S1. Снова, в предпочтительном варианте этого второго примера исполнения абсолютное значение переменной разности частот DVA при данном регулирующем сигнале SRG идентично для обоих режимов движения.
Таким образом, в предпочтительном варианте второго примера исполнения видна симметрия работы между режимом запуска PPS и режимом торможения FRN. Из такой симметрии работы следует оптимальный КПД, как при режиме запуска, так и в режиме торможения.
Следует еще отметить, что предусматривается, чтобы контрольный сигнал SCS сохранял тот же математический знак для обоих возможных режимов работы. В этом втором примере исполнения, согласно изобретению, математический знак значения контрольного сигнала SCS положительный. Точно также, математический знак регулирующего сигнала SRG, посылаемого блоком 20' положительный в обоих режимах движения второго примера исполнения двигательной системы. Такой особый механизм имеет преимущество обеспечения регулировки режима запуска PPS и режима торможения FRN с помощью одного и того же сигнала измерения SM1 основного тока питания IAL, посылаемого одним и тем же датчиком 22 этого основного тока питания IAL.
Особая отличительная черта, описанная выше, вытекает из наблюдения того, что основной ток питания IAL в любом режиме запуска PPS или торможения FRN имеет идентичное абсолютное значение для общего силового момента, возникающего на валах четырех электродвигателей М1-М4, используемых во втором примере исполнения. Этим объясняется то, что переменный ток питания асинхронного электродвигателя формируется намагничивающим током, создающим вращающийся магнитный поток, и активным током в случае, когда ротор не имеет той же частоты вращения, как магнитное поле в этой зоне ротора. Намагничивающийся ток сдвигается по фазе на 90о относительно переменного напряжения питания, которое производит намагничивающий ток. Намагничивающий ток не создает таким образом активной мощности. Наоборот, активный ток снова сдвигается по фазе на 90о относительно намагничивающего тока. В силу этого различают два возможных случая, соответствующих в первом случае режиму запуска PPS, а во втором случае режиму торможения FRN.
В режиме включения активный ток совпадает по фазе с переменным напряжением питания. Из этого следует положительная активная мощность, соответствующая мощности, подаваемой на электродвигатели, часть которой преобразуется в механическую энергию движения транспортного средства. В режиме торможения активный ток сдвигается по фазе на 180о относительно переменного напряжения питания, т.е. его значение отрицательно по отношению к активному току режима движения. В этом случае результирующая активная мощность отрицательна и соответствует электрической мощности, частично посылаемой на основное электропитание, причем эта посылаемая электрическая мощность является результатом преобразования механической энергии в электрическую энергию, поступающую от торможения, т.е. отрицательного ускорения транспортного средства, оборудованного приводной системой, согласно второму примеру исполнения.
Таким образом, амплитуда тока питания или ее интенсивность остаются идентичными при одном и том же абсолютном значении активного тока при любом режиме работы, в котором находится транспортное средство, а именно режиме движения вперед или режиме торможения. Во втором примере исполнения это последнее свойство используют для максимального упрощения приводной системы согласно изобретению. Для этого измеряют либо амплитуду основного тока питания IAL, либо среднюю величину этого выпрямленного тока. Следовательно, можно применять один и тот же датчик 22 для измерения основного тока питания IAL и один блок 20', производящий регулирующий сигнал SRG.
При измеренном значении тока имеют либо силовой момент, сообщаемый приводом для ускорения транспортного средства, либо силовой момент того же абсолютного значения, который служит для торможения этого транспортного средства в зависимости от положительных или отрицательных скольжений приводов М1-М4. Единственная адаптация в приводной системе согласно изобретению для перехода из режима запуска PPS в режим торможения FRN состоит в изменении сигнала скольжения при соблюдении одного и того же математического знака для контрольного сигнала SCS.
Факт регулирования частоты питания FAL, предусмотренной идентичной для всех электродвигателей, на один сигнал SFMX, представляющий максимальную роторную частоту всех электродвигателей, включенных в приводную систему согласно изобретению, представляет множество преимуществ. Первое преимущество состоит в том, что статорная частота всех электродвигателей и, следовательно, частота питания FAL всех электродвигателей регулируются на основании только двух сигналов, а именно, контрольного сигнала SCS и сигнала SFMX. Затем статорная частота всех электродвигателей регулируется на основании этих обоих сигналов, каким бы ни был режим запуска PPS или торможения FRN.
Более того, выбор сигнала SFMX в качестве параметра регулирования статорной частоты FST всех электродвигателей гарантирует адекватное и когерентное поведение всех электродвигателей в любом режиме запуска или торможения. Действительно, в режиме запуска приводная система согласно изобретению обеспечивает режим движения для каждого из названных электродвигателей.
В случае тормозного режима приводная система согласно изобретению получает хорошие тормозные свойства при регулировании статорной частоты всех электродвигателей по одному параметру, определяемому сигналом SFMX, соответствующим максимальной роторной частоте всех электродвигателей. Таким образом, ни одно из колес не блокируется по той или иной причине, поскольку если колесо срывается при торможении, его скорость может лишь уменьшаться и, следовательно, уменьшается силовой момент торможения, накладываемый на соответствующее колесо, связанное с этим электродвигателем. Вследствие этого колесо снова обретает сцепление и нормальную скорость качения или в случае почти нулевого сцепления его разность частот никогда не превысит сумму фиксированной частотной разности и переменной частотной разности DVA. Такая приводная система обладает также преимуществом обеспечения максимального сцепления колес с дорожным покрытием во время торможения.
Следует заметить, что в конце торможения естественно предусмотрено, чтобы первый сигнал управления SCF частоты питания FAL соответствовал в любой момент положительной частоте.
В варианте второго примера исполнения приводной системы согласно изобретению, где предусмотрена интегральная тяга, можно предусмотреть выполнение электродвигателей разного размера, а именно тех из них, которые находятся в передней части и тех, которые находятся в задней части транспортного средства. В этом случае предусматривается способность адаптации свойств и размеров электродвигателей, находящихся в передней части, к свойствам и размерам электродвигателей, находящихся в задней части транспортного средства, с тем, чтобы работа каждого из электродвигателей соответствовала одному и тому же узлу управления.
Следует заметить, что в этом варианте можно также предусмотреть два электропитания: одно для электродвигателей, находящихся в передней части и другое для электродвигателей, находящихся в задней части, причем все электродвигатели будут управляться одним и тем же узлом 6 управления. В последнем случае можно усиливать второй сигнал управления амплитуды напряжения питания между узлом управления и электропитанием, питающим наиболее мощные электродвигатели, с тем, чтобы эти электродвигатели имели большую амплитуду напряжения питания, но пропорциональную амплитуде напряжения питания менее мощных приводов.
Реферат
Использование: тяговый электропривод транспортного средства. Сущность изобретения: система содержит по меньшей мере два асинхронных электродвигателя, питаемых параллельно от общего источника питания. Этот источник управляется узлом управления, который посылает ему первый управляющий сигнал, определяющий значение частоты питания, и второй сигнал управления, определяющий значение амплитуды напряжения питания. Эти управляющие сигналы регулируются в зависимости от сигнала измерения основного тока питания, контрольного сигнала и сигнала, представляющего значение максимальной роторной частоты вращения. При наличии двух асинхронных электродвигателей один из них связан с двумя передними, а другой - с двумя задними колесами транспортного средства. В случае использования четырех асинхронных электродвигателей два из них связаны с индивидуальными передними колесами, а два - с индивидуальными задними колесами. 17 з. п. ф-лы, 9 ил.
Комментарии