Модуль управления (варианты) и способ управления (варианты) для механизма регулируемых фаз газораспределения - RU2432479C2
Код документа: RU2432479C2
Чертежи















Описание
Изобретение, в общем, относится к модулю управления и способу управления для механизма регулируемых фаз газораспределения. Более конкретно, изобретение относится к регулированию фаз газораспределения, которое выполняется, когда двигатель внутреннего сгорания работает на холостом ходу.
Механизм регулируемых фаз газораспределения (VVT), который изменяет фазу (т.е. угол поворота распределительного вала), в которой впускной клапан или выпускной клапан открыты/закрыты, на основе рабочего режима двигателя, использовался ранее. Этот механизм регулируемых фаз газораспределения изменяет фазу впускного клапана или выпускного клапана посредством поворота распределительного вала, который открывает/закрывает впускной клапан или выпускной клапан, например, относительно звездочки. Распределительный вал вращается гидравлически или посредством привода, например, электродвигателя. Труднее получать крутящий момент для вращения распределительного вала, когда распределительный вал вращается посредством электродвигателя, чем когда распределительный вал вращается гидравлически. Следовательно, когда распределительный вал вращается посредством электродвигателя, обычно крутящий момент, формируемый электродвигателем, передается распределительному валу, например, через рычажный механизм, чтобы вращать распределительный вал.
Публикация заявки на патент Японии номер 2005-98142 (JP-A-2005-98142) описывает устройство регулирования фаз газораспределения, которое является разновидностью вышеописанного механизма регулируемых фаз газораспределения и которое изменяет направление, в котором целевая фаза изменяется, в пределах короткого времени. В устройстве регулирования фаз газораспределения, описанном в JP-A-2005-98142, как показано на фиг.16 и 18, степень изменения (соответствующая наклону касательной на графике с фиг.16 и 18) величины изменения фазы вращения распределительного вала относительно коленчатого вала (т.е. величина изменения фазы клапана) по отношению к величине изменения фазы вращения направляющего корпуса вращения, который вращается в соответствии с работой привода, изменяется на основе области фазы.
Обычно, когда двигатель работает на холостом ходу, целевое значение фазы клапана задается равным заданному значению, которое является подходящим для работы на холостом ходу. Напротив, в механизме регулируемых фаз газораспределения, с помощью которого степень изменения переменно задается на основе области фазы клапана, есть возможность того, что степень изменения фазы клапана, подходящей для работы на холостом ходу, возможно, не является соответствующей в зависимости от диапазона, в котором фазе разрешено изменяться, и который должен быть обеспечен, чтобы учитывать различные рабочие режимы. Помимо этого, когда целевая скорость на холостом ходу для двигателя переменно задается на основе состояния транспортного средства, необходимо извлекать соответствующий способ для задания фазы клапана в соответствии с переменно задаваемой целевой скоростью на холостом ходу. В механизме регулируемых фаз газораспределения, описанном выше, необходимо извлекать соответствующий способ для задания фазы клапана, которая используется в ходе работы на холостом ходу, чтобы помещать фазу клапана в пределы области, в которой степень изменения является надлежащей, когда двигатель останавливается. Как описано выше, в механизме регулируемых фаз газораспределения, с помощью которого степень изменения величины изменения фазы клапана относительно рабочей величины привода (коэффициента снижения скорости) изменяется на основе фазы клапана, необходимо учитывать зависимость между фазой клапана и коэффициентом снижения скорости, для того чтобы выполнять соответствующее управление фазой клапана в ходе работы на холостом ходу.
Изобретение обеспечивает технологию надлежащего управления фазой клапана, когда двигатель внутреннего сгорания работает на холостом ходу, с использованием механизма регулируемых фаз газораспределения, который выполнен таким образом, что отношение величины изменения фазы клапана относительно рабочей величины привода (коэффициента снижения скорости) изменяется на основе фазы клапана.
Согласно первому объекту настоящего изобретения создан модуль управления для механизма регулируемых фаз газораспределения, который изменяет распределение фаз открытия/закрытия, по меньшей мере, одного из впускного клапана и выпускного клапана двигателя внутреннего сгорания на величину изменения, которая соответствует рабочей величине привода, и который сконфигурирован таким образом, что диапазон регулирования, в котором разрешено управление распределением фаз открытия/закрытия посредством механизма регулируемых фаз газораспределения, включает в себя первую область и вторую область, и отношение величины изменения распределения фаз открытия/закрытия относительно рабочей величины привода является более высоким, когда распределение фаз открытия/закрытия находится в рамках первой области, чем тогда, когда распределение фаз открытия/закрытия находится в рамках второй области, характеризующийся тем, что он содержит модуль задания целевой скорости на холостом ходу, который переменно задает целевую скорость холостого хода для двигателя внутреннего сгорания, которая используется, когда двигатель внутреннего сгорания работает на холостом ходу, на основе состояния транспортного средства; и модуль ограничения фазы, который ограничивает диапазон, в котором распределение фаз открытия/закрытия изменяется посредством механизма регулируемых фаз газораспределения, рамками первой области, когда целевая скорость холостого хода, которая задана посредством модуля задания целевой скорости холостого хода, ниже заданной скорости вращения.
Предпочтительно заданная скорость вращения задается равной значению, которое соответствует нижнему предельному значению диапазона скорости вращения, в котором имеется низкая вероятность того, что пассажир услышит шум при работе механизма регулируемых фаз газораспределения, когда распределение фаз открытия/закрытия управляется вне первой области.
Предпочтительно модуль управления дополнительно содержит модуль управления приводом, который управляет рабочей величиной привода на основе отклонения текущего значения распределения фаз открытия/закрытия от целевого значения распределения фаз открытия/закрытия, при этом модуль ограничения фазы включает в себя модуль задания целевой фазы, который задает целевое значение распределения фаз открытия/закрытия равным значению в рамках первой области, в то время как двигатель внутреннего сгорания работает на холостом ходу.
Предпочтительно модуль задания целевой фазы задает целевое значение распределения фаз открытия/закрытия равным значению в рамках второй области в случае, если диапазон, в котором распределение фаз открытия/закрытия изменяется посредством механизма регулируемых фаз газораспределения, не должен быть ограничен рамками первой области.
Предпочтительно модуль управления дополнительно содержит модуль определения температуры, который определяет, является ли температура двигателя внутреннего сгорания равной или ниже заданной эталонной температуры, при этом случай, когда диапазон, в котором распределение фаз открытия/закрытия изменяется посредством механизма регулируемых фаз газораспределения, не должен быть ограничен рамками первой области, включает в себя, по меньшей мере, случай, когда целевая скорость на холостом ходу, заданная посредством модуля задания целевой скорости на холостом ходу, равна или выше заданной скорости вращения, или случай, когда модуль определения температуры определяет, что температура двигателя внутреннего сгорания является более высокой, чем заданная эталонная температура.
Предпочтительно двигатель внутреннего сгорания установлен на транспортном средстве, которое движется в режиме стабилизации скорости, который выбран из числа режимов стабилизации скорости, включающих в себя первый режим стабилизации скорости, в котором транспортное средство движется с использованием мощности приведения в движение, формируемой посредством двигателя внутреннего сгорания, и вторым режимом стабилизации скорости, в котором двигатель внутреннего сгорания остановлен, и транспортное средство движется с использованием мощности приведения в движение, формируемой посредством источника питания для приведения в движение, который отличается от двигателя внутреннего сгорания.
Предпочтительно первая область находится ближе к наиболее поздней фазе, чем вторая область.
Предпочтительно привод образован электродвигателем, и рабочая величина привода представляет собой скорость вращения электродвигателя относительно скорости вращения распределительного вала, который приводит в движение клапан, распределение фаз открытия/закрытия которого изменяется.
Согласно второму объекту настоящего изобретения создан способ управления для механизма регулируемых фаз газораспределения, который изменяет распределение фаз открытия/закрытия, по меньшей мере, одного из впускного клапана и выпускного клапана двигателя внутреннего сгорания на величину изменения, которая соответствует рабочей величине привода, и который сконфигурирован таким образом, что диапазон регулирования, в котором разрешено управление распределением фаз открытия/закрытия посредством механизма регулируемых фаз газораспределения, включает в себя первую область и вторую область, и отношение величины изменения распределения фаз открытия/закрытия относительно рабочей величины привода является более высоким, когда распределение фаз открытия/закрытия находится в рамках первой области, чем тогда, когда распределение фаз открытия/закрытия находится в рамках второй области, характеризующийся тем, что переменно задают целевую скорость на холостом ходу для двигателя внутреннего сгорания, которая используется, когда двигатель внутреннего сгорания работает на холостом ходу, на основе состояния транспортного средства; и ограничивают диапазон, в котором распределение фаз открытия/закрытия изменяется посредством механизма регулируемых фаз газораспределения, рамками первой области, когда целевая скорость на холостом ходу для двигателя внутреннего сгорания ниже заданной скорости вращения, в то время когда двигатель внутреннего сгорания работает на холостом ходу.
Предпочтительно двигатель внутреннего сгорания установлен на транспортном средстве, которое движется в режиме стабилизации скорости, который выбирают из числа режимов стабилизации скорости, включающих в себя первый режим стабилизации скорости, в котором транспортное средство движется с использованием мощности приведения в движение, формируемой посредством двигателя внутреннего сгорания, и вторым режимом стабилизации скорости, в котором двигатель внутреннего сгорания остановлен и транспортное средство движется с использованием мощности приведения в движение, формируемой посредством источника питания для приведения в движение, который отличается от двигателя внутреннего сгорания.
Предпочтительно привод образуют из электродвигателя, и рабочая величина привода представляет собой скорость вращения электродвигателя относительно скорости вращения распределительного вала, который приводит в движение клапан, распределение фаз открытия/закрытия которого изменяется.
С помощью модуля управления и способа управления, описанных выше, когда целевая скорость на холостом ходу для двигателя внутреннего сгорания переменно задается на основе состояния транспортного средства (например, выбранного положения переключения передач или диапазона передач), если целевая скорость на холостом ходу задана со значением ниже заданной скорости вращения, и пассажир транспортного средства без труда слышит шум при работе механизма регулируемых фаз газораспределения, диапазон, в котором фазе клапана разрешено изменяться, ограничен рамками области, в которой степень величины изменения распределения фаз открытия/закрытия (фаза клапана) относительно рабочей величины привода является высоким. Как результат, фаза клапана управляется в рамках области фазы (первой области), в которой относительно трудно передавать внешнюю вращающую силу на внутреннюю часть механизма регулируемых фаз газораспределения, и скорость работы каждого элемента в механизме регулируемых фаз газораспределения является относительно низкой. Следовательно, можно делать шум при работе механизма регулируемых фаз газораспределения относительно низким так, чтобы пассажир транспортного средства не слышал шума при работе.
Согласно третьему объекту настоящего изобретения создан модуль управления для механизма регулируемых фаз газораспределения, который изменяет распределение фаз открытия/закрытия, по меньшей мере, одного из впускного клапана и выпускного клапана двигателя внутреннего сгорания на величину изменения, которая соответствует рабочей величине привода, и который сконфигурирован таким образом, что диапазон регулирования, в котором разрешено управление распределением фаз открытия/закрытия посредством механизма регулируемых фаз газораспределения, включает в себя первую область и вторую область, и отношение величины изменения распределения фаз открытия/закрытия относительно рабочей величины привода является более высоким, когда распределение фаз открытия/закрытия находится в рамках первой области, чем тогда, когда распределение фаз открытия/закрытия находится в рамках второй области, характеризующийся тем, что он содержит модуль определения температуры, который определяет, является ли температура двигателя внутреннего сгорания равной или ниже заданной эталонной температуры; и модуль ограничения фазы, который ограничивает диапазон, в котором распределение фаз открытия/закрытия изменяется посредством механизма регулируемых фаз газораспределения, рамками первой области, когда определено то, что температура двигателя внутреннего сгорания равна или ниже заданной эталонной температуры, в то время как двигатель внутреннего сгорания работает на холостом ходу.
Предпочтительно отношение величины изменения распределения фаз открытия/закрытия относительно рабочей величины привода в первой области является постоянным.
Предпочтительно отношение величины изменения распределения фаз открытия/закрытия относительно рабочей величины привода во второй области является постоянным.
Предпочтительно модуль управления дополнительно содержит модуль управления приводом, который управляет рабочей величиной привода на основе отклонения текущего значения распределения фаз открытия/закрытия от целевого значения распределения фаз открытия/закрытия, при этом модуль ограничения фазы включает в себя модуль задания целевой фазы, который задает целевое значение распределения фаз открытия/закрытия равным значению в рамках первой области, в то время как двигатель внутреннего сгорания работает на холостом ходу.
Предпочтительно модуль задания целевой фазы задает целевое значение распределения фаз открытия/закрытия равным значению в рамках второй области в случае, если диапазон, в котором распределение фаз открытия/закрытия изменяется посредством механизма регулируемых фаз газораспределения, не должен быть ограничен рамками первой области.
Предпочтительно модуль управления дополнительно содержит модуль задания целевой скорости на холостом ходу, который переменно задает целевую скорость на холостом ходу для двигателя внутреннего сгорания, которая используется, когда двигатель внутреннего сгорания работает на холостом ходу, на основе состояния транспортного средства, при этом случай, когда диапазон, в котором распределение фаз открытия/закрытия изменяется посредством механизма регулируемых фаз газораспределения, не должен быть ограничен рамками первой области, включает в себя, по меньшей мере, случай, когда целевая скорость на холостом ходу, заданная посредством модуля задания целевой скорости на холостом ходу, равна или выше заданной скорости вращения, или случай, когда модуль определения температуры определяет, что температура двигателя внутреннего сгорания является более высокой, чем заданная эталонная температура.
Предпочтительно двигатель внутреннего сгорания установлен на транспортном средстве, которое движется в режиме стабилизации скорости, который выбран из числа режимов стабилизации скорости, включающих в себя первый режим стабилизации скорости, в котором транспортное средство движется с использованием мощности приведения в движение, формируемой посредством двигателя внутреннего сгорания, и вторым режимом стабилизации скорости, в котором двигатель внутреннего сгорания остановлен и транспортное средство движется с использованием мощности приведения в движение, формируемой посредством источника питания для приведения в движение, который отличается от двигателя внутреннего сгорания.
Предпочтительно первая область находится ближе к наиболее поздней фазе, чем вторая область.
Предпочтительно привод образован электродвигателем, и рабочая величина привода представляет собой скорость вращения электродвигателя относительно скорости вращения распределительного вала, который приводит в движение клапан, распределение фаз открытия/закрытия которого изменяется.
Предпочтительно модуль управления дополнительно содержит модуль задания целевой скорости на холостом ходу, который переменно задает целевую скорость на холостом ходу для двигателя внутреннего сгорания, которая используется, когда двигатель внутреннего сгорания работает на холостом ходу, на основе состояния транспортного средства; при этом модуль ограничения фазы ограничивает диапазон, в котором распределение фаз открытия/закрытия изменяется посредством механизма регулируемых фаз газораспределения, рамками первой области, когда целевая скорость на холостом ходу, которая задана посредством модуля задания целевой скорости на холостом ходу, ниже заданной скорости вращения.
Согласно четвертому объекту настоящего изобретения создан способ управления для механизма регулируемых фаз газораспределения, который изменяет распределение фаз открытия/закрытия, по меньшей мере, одного из впускного клапана и выпускного клапана двигателя внутреннего сгорания на величину изменения, которая соответствует рабочей величине привода, и который сконфигурирован таким образом, что диапазон регулирования, в котором разрешено управление распределением фаз открытия/закрытия посредством механизма регулируемых фаз газораспределения, включает в себя первую область и вторую область, и отношение величины изменения распределения фаз открытия/закрытия относительно рабочей величины привода является более высоким, когда распределение фаз открытия/закрытия находится в рамках первой области, чем тогда, когда распределение фаз открытия/закрытия находится в рамках второй области, характеризующийся тем, что определяют, является ли температура двигателя внутреннего сгорания равной или ниже заданной эталонной температуры; и ограничивают диапазон, в котором распределение фаз открытия/закрытия изменяется посредством механизма регулируемых фаз газораспределения, рамками первой области, когда определено то, что температура двигателя внутреннего сгорания равна или ниже заданной эталонной температуры, в то время как двигатель внутреннего сгорания работает на холостом ходу.
Предпочтительно двигатель внутреннего сгорания установлен на транспортном средстве, которое движется в режиме стабилизации скорости, который выбран из числа режимов стабилизации скорости, включающих в себя первый режим стабилизации скорости, в котором транспортное средство движется с использованием мощности приведения в движение, формируемой посредством двигателя внутреннего сгорания, и вторым режимом стабилизации скорости, в котором двигатель внутреннего сгорания остановлен, и транспортное средство движется с использованием мощности приведения в движение, формируемой посредством источника питания для приведения в движение, который отличается от двигателя внутреннего сгорания.
Предпочтительно привод образуют из электродвигателя, и рабочая величина привода представляет собой скорость вращения электродвигателя относительно скорости вращения распределительного вала, который приводит в движение клапан, распределение фаз открытия/закрытия которого изменяется.
С помощью модуля управления и способа управления, описанных выше, когда двигатель внутреннего сгорания является холодным, можно ограничивать диапазон, в котором фазе клапана разрешено изменяться, когда двигатель внутреннего сгорания работает на холостом ходу, рамками области (первой области), где коэффициент снижения скорости является высоким, и момент открытия или закрытия клапана может быть сохранен без точного управления работой привода с учетом того факта, что есть возможность того, что фаза клапана не может быть изменена на достаточную величину посредством механизма регулируемых фаз газораспределения вследствие увеличения трения, когда двигатель внутреннего сгорания является холодным. Как результат, когда двигатель внутреннего сгорания, который работал на холостом ходу, переводится в состояние останова в то время, когда двигатель внутреннего сгорания является холодным, можно надежно помещать фазу клапана в рамки первой области, когда двигатель останавливается. Следовательно, можно подавлять отклонение фактической фазы клапана от фазы, используемой при управлении, которое, вероятно, возникает, когда двигатель останавливается.
В первом и третьем объектах изобретения, описанных выше, модуль управления дополнительно может включать в себя модуль управления приводом, который управляет рабочей величиной привода на основе отклонения текущего значения распределения фаз открытия/закрытия от целевого значения распределения фаз открытия/закрытия. Помимо этого, модуль ограничения фазы может включать в себя модуль задания целевой фазы, который задает целевое значение распределения фаз открытия/закрытия равным значению в рамках первой области, когда диапазон, в котором распределение фаз открытия/закрытия изменяется посредством механизма регулируемых фаз газораспределения, ограничен рамками первой области, в то время как двигатель внутреннего сгорания работает на холостом ходу.
При этой конфигурации можно легко ограничивать диапазон, в котором фазе клапана разрешено изменяться, когда двигатель внутреннего сгорания работает на холостом ходу, рамками первой области посредством задания целевого значения фазы клапана равным значению в рамках ограниченной области.
Помимо этого, модуль задания целевой фазы может задавать целевое значение распределения фаз открытия/закрытия равным значению в рамках второй области в случае, если диапазон, в котором распределение фаз открытия/закрытия изменяется посредством механизма регулируемых фаз газораспределения, не должен быть ограничен рамками первой области.
При этой конфигурации, когда фаза клапана, которая является подходящей для повышения КПД сгорания, которое осуществляется в двигателе внутреннего сгорания, когда он работает на холостом ходу, находится вне первой области, если целевая скорость на холостом ходу равна или выше заданной скорости вращения, и менее вероятно, что пассажир транспортного средства услышит шум при работе механизма регулируемых фаз газораспределения, фаза клапана управляется с более высоким приоритетом, присвоенным повышению КПД сгорания.
Двигатель внутреннего сгорания может устанавливаться в транспортном средстве, которое движется в режиме стабилизации скорости, который выбран из числа режимов стабилизации скорости, включающих в себя первый режим стабилизации скорости, в котором транспортное средство движется с использованием мощности приведения в движение, генерируемой посредством двигателя внутреннего сгорания, и вторым режимом стабилизации скорости, в котором двигатель внутреннего сгорания остановлен, и транспортное средство движется с использованием мощности приведения в движение, генерируемой посредством источника питания для приведения в движение, который отличается от двигателя внутреннего сгорания.
При этой конфигурации фаза клапана управляется надлежащим образом, когда двигатель внутреннего сгорания работает на холостом ходу, с использованием механизма регулируемых фаз газораспределения, который установлен в гибридном транспортном средстве, оснащенном двигателем внутреннего сгорания и источником питания для приведения в движение, отличном от двигателя внутреннего сгорания.
Помимо этого, первая область может быть ближе к наиболее поздней фазе, чем вторая область. При этой конфигурации в гибридном транспортном средстве, в котором двигатель внутреннего сгорания периодически часто запускается, фаза клапана на стороне запаздывания, которая задана для управления снижением давления, которое выполняется, когда двигатель запущен, а именно целевое значение фазы клапана, когда двигатель остановлен, задается равным значению в рамках области, в которой коэффициент снижения скорости является высоким.
В любом из объектов изобретения с первого по четвертый привод может быть сформирован из электродвигателя, и рабочая величина привода может быть скоростью вращения электродвигателя относительно скорости вращения распределительного вала, который приводит в движение клапан, распределение фаз открытия/закрытия которого изменяется.
При этой конфигурации, когда привод сформирован из электродвигателя и рабочей величиной привода является скорость вращения электродвигателя относительно скорости вращения распределительного вала, который останавливается в ответ на останов двигателя внутреннего сгорания, фаза клапана надлежащим образом управляется, когда двигатель внутреннего сгорания работает на холостом ходу.
С объектами изобретения, описанными выше, можно надлежащим образом управлять фазой клапана, когда двигатель внутреннего сгорания работает на холостом ходу, с использованием механизма регулируемых фаз газораспределения, который сконфигурирован таким образом, что отношение величины изменения фазы клапана к рабочей величине привода (коэффициенту снижения скорости) изменяется на основе фазы клапана.
Вышеприведенные и дополнительные признаки и преимущества изобретения должны стать очевидными из последующего описания варианта осуществления со ссылкой на прилагаемые чертежи, на которых одинаковые или соответствующие элементы обозначаются одинаковыми ссылочными позициями.
Фиг.1 является представлением, схематично показывающим структуру силовой схемы гибридного транспортного средства;
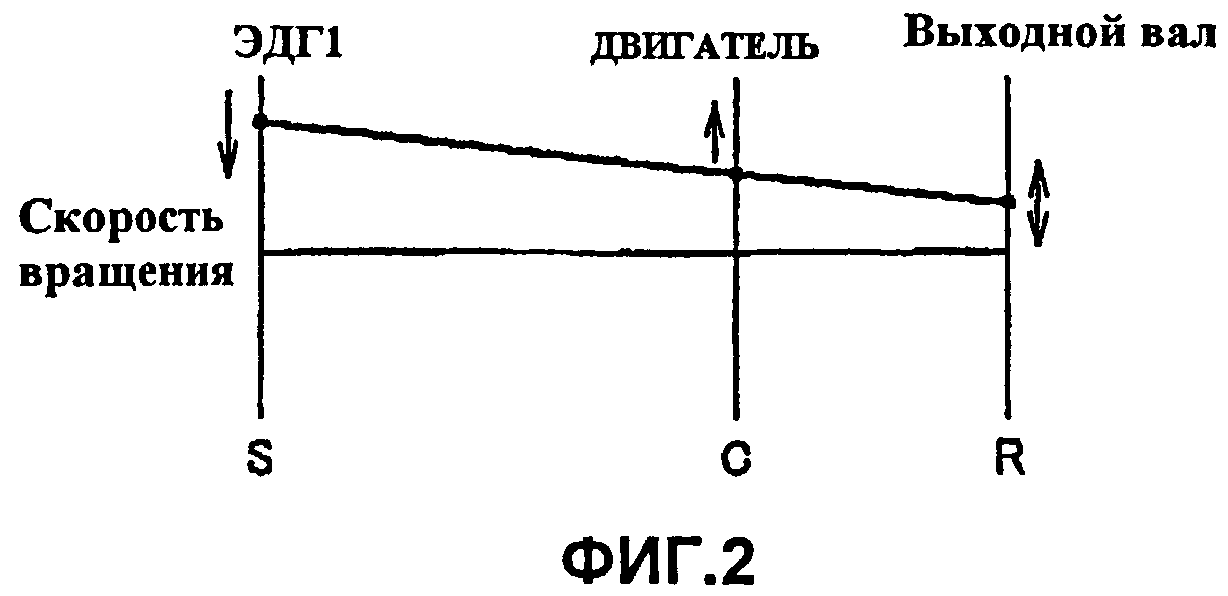
фиг.2 является коллинеарной схемой для механизма деления мощности;
фиг.3 является коллинеарной схемой для трансмиссии;
фиг.4 является представлением, схематично показывающим структуру двигателя гибридного транспортного средства;
фиг.5 является графиком, показывающим карту, которая задает фазу впускного клапана;
фиг.6 является видом в поперечном разрезе, показывающим впускной VVT-механизм;
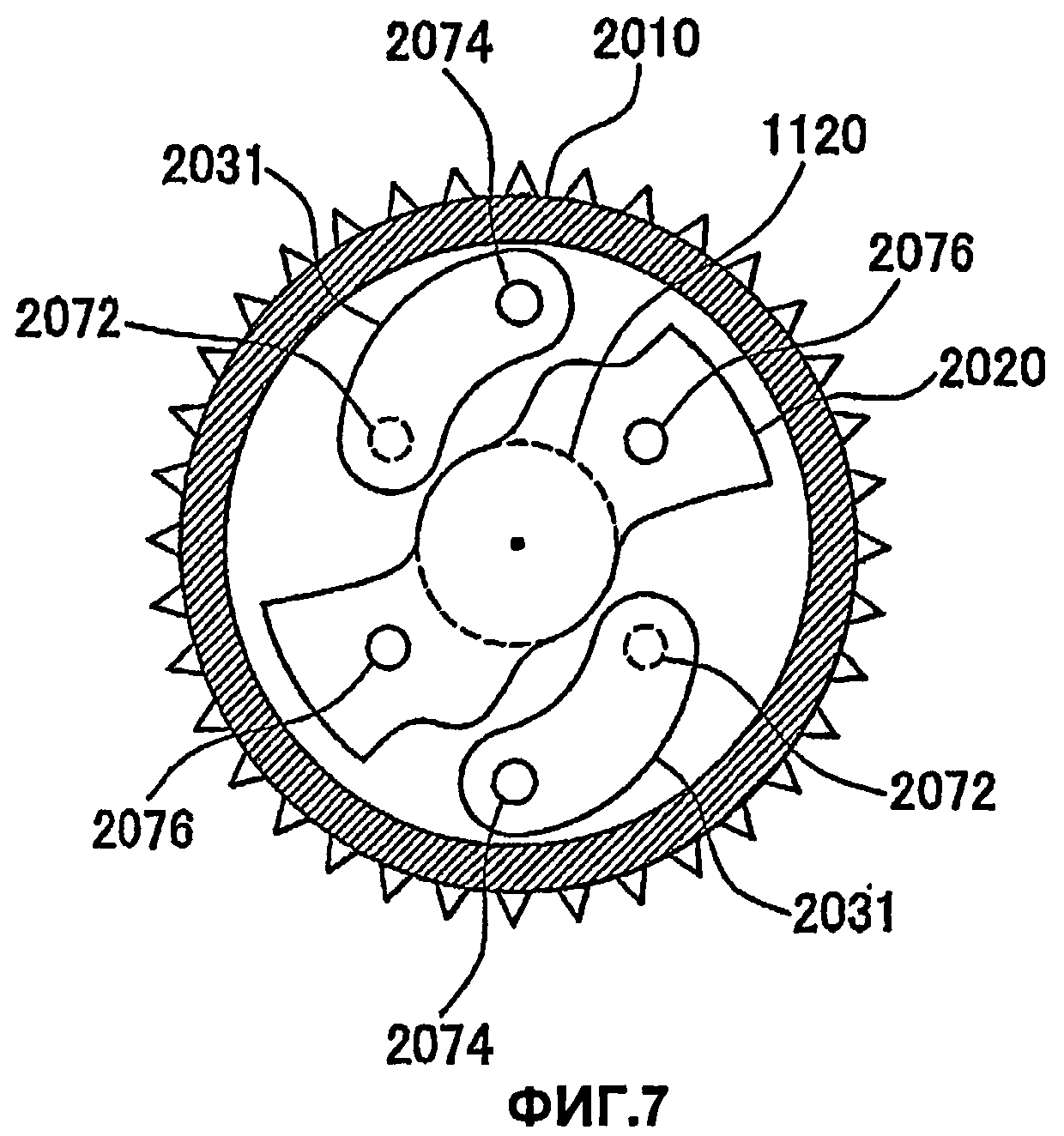
фиг.7 является видом в поперечном разрезе по линии VII-VII с фиг.6;
фиг.8 является первым видом в поперечном разрезе по линии VIII-VIII с фиг.6;
фиг.9 является вторым видом в поперечном разрезе по линии VIII-VIII с фиг.6;
фиг.10 является видом в поперечном разрезе по линии Х-Х с фиг.6;
фиг.11 является видом в поперечном разрезе по линии XI-XI с фиг.6;
фиг.12 является графиком, показывающим коэффициент снижения скорости, который элементы впускного VVT-механизма реализуют совместно;
фиг.13 является графиком, показывающим зависимость между фазой направляющей пластины относительно звездочки и фазой впускного клапана;
фиг.14 является блок-схемой, иллюстрирующей конфигурацию управления, выполняемого для механизма регулируемых фаз газораспределения согласно варианту осуществления изобретения;
фиг.15 является графиком, иллюстрирующим способ для задания целевой фазы клапана, которая используется, когда двигатель работает на холостом ходу;
фиг.16 является блок-схемой последовательности операций способа для задания целевой фазы для впускного клапана, который используется, когда двигатель работает на холостом ходу, с использованием программно-реализованного процесса, выполняемого посредством ЭМУ согласно варианту осуществления изобретения;
фиг.17 является блок-схемой, иллюстрирующей конфигурацию управления, выполняемого для механизма регулируемых фаз газораспределения согласно модифицированному примеру варианта осуществления изобретения, и
фиг.18 является блок-схемой последовательности операций способа для задания целевой фазы для впускного клапана, который используется, когда двигатель работает на холостом ходу, с использованием программно-реализованного процесса, выполняемого посредством ЭМУ согласно модифицированному примеру варианта осуществления изобретения.
Далее описывается вариант осуществления изобретения со ссылкой на прилагаемые чертежи. В нижеприведенном описании одинаковые или соответствующие элементы обозначаются одинаковыми ссылками с номерами, и описания относительно элементов, имеющих одинаковые ссылки с номером, предоставляются только один раз ниже.
Силовая схема гибридного транспортного средства, оснащенного модулем управления согласно варианту осуществления изобретения, описывается со ссылкой на фиг.1. Модуль управления согласно варианту осуществления изобретения реализован, когда ЭМУ (электронный модуль управления) 100 выполняет программу, сохраненную в ПЗУ (постоянное запоминающее устройство) 102 ЭМУ 100. ЭМУ 100 может быть разделен на несколько ЭМУ. Программа, которая выполняется посредством ЭМУ 100, может быть записана на CD диск или DVD диск и выпущена на рынок.
Как показано на фиг.1, силовая схема сформирована главным образом из двигателя 1000, первого ЭДГ (электродвигателя-генератора) 200, механизма 300 деления мощности, второго ЭДГ 400 и трансмиссии 500. Механизм 300 деления мощности предусмотрен между двигателем 1000 и первым ЭДГ 200. Механизм 300 деления мощности комбинирует крутящий момент от двигателя 1000 с крутящим моментом от первого ЭДГ 200 или делит крутящий момент от двигателя 1000 на крутящий момент, который передается в первый ЭДГ 200, и крутящий момент, который передается на приводные колеса.
Двигатель 1000 является известным силовым модулем, который сжигает топливо, чтобы генерировать мощность приведения в движение. Рабочий режим двигателя 1000, такой как величина открытия дроссельного клапана (объем всасываемого воздуха), величина подачи топлива и распределение зажигания, управляется электрическим образом. Управление выполняется посредством ЭМУ 100, который сформирован главным образом из микрокомпьютера. Двигатель 1000 подробнее описывается далее.
Первый ЭДГ 200 является, например, трехфазной вращающейся электрической машиной переменного тока и структурирован таким образом, чтобы выступать в качестве электродвигателя (двигателя), а также выступать в, качестве генератора. Первый ЭДГ 200 соединен с модулем 700 накопления, например, аккумулятором, через инвертор 210. Выходной крутящий момент от первого ЭДГ 200 или рекуперативный крутящий момент надлежащим образом регулируется посредством управления инвертором 210. Инвертор 210 управляется посредством ЭМУ 100. Статор (не показан) первого ЭДГ 200 блокирован от вращения.
Механизм 300 деления мощности является известной зубчатой передачей, которая формирует дифференциальный эффект посредством использования трех вращающихся элементов, т.е. солнечной шестерни (S) 310, которая является шестерней внешнего зацепления, коронной шестерни (R) 320, которая является шестерней внутреннего зацепления, размещенной соосно с солнечной шестерней (S) 310 и водила (С) 330, которое поддерживает сателлиты, которые находятся в зацеплении с солнечной шестерней (S) 310 и коронной шестерней (R) 320, таким образом, что сателлитам предоставлена возможность вращаться вокруг своих осей и проворачивать солнечную шестерню (S) 310. Выходной вал двигателя 1000 соединен с водилом (С) 330, который является первым вращающимся элементом, через демпфер. Другими словами, водило (С) 330 выступает в качестве входного элемента.
Ротор (не показан) первого ЭДГ 200 соединен с солнечной шестерней (S) 310, которая является вторым вращающимся элементом. Следовательно, солнечная шестерня (S) 310 выступает в качестве так называемого элемента силы реакции, а коронная шестерня (R) 320, которая является третьим вращающимся элементом, выступает в качестве выходного элемента. Коронная шестерня (R) 320 соединена с выходным валом 600, который соединен с приводными колесами (не показаны).
Фиг.2 является коллинеарной диаграммой для механизма 300 деления мощности. Как показано на фиг.2, когда крутящий момент от первого ЭДГ 200 вводится в солнечную шестерню (S) 310 в качестве реактивного крутящего момента для крутящего момента, который выводится из двигателя 1000 и вводится в водило (С) 330, коронная шестерня (R) 320, которая выступает в качестве выходного элемента, выводит крутящий момент, который получается посредством повышения или понижения крутящего момента, выводимого из двигателя 1000, с помощью реактивного крутящего момента. В этом случае, ротор первого ЭДГ 200 вращается посредством этого крутящего момента, и первый ЭДГ 200 выступает в качестве генератора. Если скорость вращения (выходная скорость вращения) коронной шестерни (R) 320 является постоянной, скорость вращения двигателя 1000 может непрерывно (бесступенчато) изменяться посредством регулирования скорости вращения первого ЭДГ 200. Таким образом, управление для задания скорости вращения двигателя 1000, например, равной значению, при котором достигается оптимальный КПД сгорания топлива, выполняется посредством управления первым ЭДГ 200. ЭМУ 100 выполняет управление.
Когда двигатель 1000 остановлен в то время, когда транспортное средство движется, первый ЭДГ 200 вращается в обратном направлении. В этом состоянии, если первый ЭДГ 200 используется в качестве электродвигателя, чтобы формировать крутящий момент, который прикладывается в направлении вращения вперед, крутящий момент, который прикладывается в таком направлении, что двигатель 1000 вращается в прямом направлении, прикладывается к двигателю 1000, который соединен с водилом (С) 330. Таким образом, двигатель 1000 запускается посредством первого ЭДГ 200 (прокрутка или проворачивание двигателя). В этом случае, крутящий момент, который прикладывается в таком направлении, что вращение выходного вала 600 останавливается, прикладывается к выходному валу 600. Следовательно, крутящий момент, используемый для того, чтобы позволить транспортному средству двигаться, поддерживается посредством управления крутящим моментом, который выводится из второго ЭДГ 400, и в то же время двигатель 1000 запускается плавно. Этот тип системы с гибридным приводом называют гибридной системой с механическим делением мощности или гибридной системой с делением мощности.
Снова ссылаясь на фиг.1, второй ЭДГ 1 является, например, трехфазной вращающейся электрической машиной переменного тока и структурирован таким образом, чтобы выступать в качестве электродвигателя (двигателя), а также выступать в качестве генератора. Второй ЭДГ 400 соединен с модулем 700 накопления, например аккумулятором, через инвертор 410. Крутящий момент, который получается посредством операции подачи питания, и крутящий момент, который получается посредством рекуперативной операции, регулируется посредством управления инвертором 410. Статор (не показан) второго ЭДГ 400 блокирован, чтобы не вращаться.
Трансмиссия 500 сформирована из набора планетарной зубчатой передачи Ravigneaux. Трансмиссия 500 включает в себя первую солнечную шестерню (S1) 510 и вторую солнечную шестерню (S2) 520, которые являются шестернями внешнего зацепления. Первые сателлиты 531 находятся в зацеплении с первой солнечной шестерней (S1) 510, первые сателлиты 531 находятся в зацеплении со вторыми сателлитами 532, и вторые сателлиты 532 находятся в зацеплении с коронной шестерней (R) 540, которая размещается соосно с солнечными шестернями 510 и 520.
Сателлиты 531 и 532 поддерживаются посредством водила (С) 550 таким образом, что сателлитам 531 и 532 обеспечивается возможность вращения вокруг своих осей и проворота солнечных шестерней 510 и 520. Вторая солнечная шестерня (S2) 520 находится в зацеплении со вторыми сателлитами 532. Следовательно, первая солнечная шестерня (S1) 510 и коронная шестерня (R) 540 вместе с сателлитами 531 и 532 составляют механизм, который соответствует планетарной зубчатой передаче с двумя сателлитами. Вторая солнечная шестерня (S2) 520 и коронная шестерня (R) 540 вместе со вторыми сателлитами 532 составляют механизм, который соответствует планетарной зубчатой передаче с одним сателлитом.
Трансмиссия 500 дополнительно включает в себя Bl-тормоз 561, который выборочно блокирует первую солнечную шестерню (S1) 510, и В2-тормоз 562, который выборочно блокирует коронную шестерню (R) 540. Эти тормоза 561 и 562 являются так называемыми фрикционными сцепляющими элементами, которые формируют силу зацепления с использованием силы трения. Многодисковые сцепляющие устройства или ленточные сцепляющие устройства могут использоваться в качестве тормозов 561 и 562. Каждый из тормозов 561 и 562 структурирован таким образом, что его перегрузочная способность по крутящему моменту непрерывно изменяется на основе силы зацепления, которая формируется гидравлическим образом. Помимо этого, второй ЭДГ 400 соединен со второй солнечной шестерней (S2) 520. Водило (С) 550 соединено с выходным валом 600.
Следовательно, в трансмиссии 500 вторая солнечная шестерня (S2) 520 выступает в качестве так называемого входного элемента, а водило (С) 550 выступает в качестве выходного элемента. Когда Bl-тормоз 561 зацеплен, высшая передача, передаточное отношение которой больше 1, выбирается. Когда В2-тормоз 562 зацеплен вместо Bl-тормоза 561, низшая передача, передаточное отношение которой является более высоким, чем передаточное отношение высшей передачи, выбирается.
Трансмиссия 500 переключается между этими передачами на основе режима вождения транспортного средства, такого как скорость транспортного средства и требуемая мощность приведения в движение (или величина нажатия педали акселератора). Более конкретно, диапазоны переключений задаются заранее в форме карты (схема переключений), и управление выполняется таким образом, чтобы выбирать одну из передач на основе определенного режима вождения транспортного средства.
Фиг.3 является коллинеарной диаграммой для трансмиссии 500. Как показано на фиг.3, когда коронная шестерня (R) 540 блокирована посредством В2-тормоза 562, низшая передача L выбирается, и крутящий момент, выводимый из второго ЭДГ 400, усиливается на основе передаточного отношения, и усиленный крутящий момент прикладывается к выходному валу 600. Когда первая солнечная шестерня (S1) 510 блокирована посредством В1-тормоза 561, выбирается высшая передача Н, передаточное отношение которой ниже значения низшей передачи L. Передаточное отношение высшей передачи Н также является более высоким чем 1. Следовательно, крутящий момент, выводимый из второго ЭДГ 400, усиливается на основе передаточного отношения, и усиленный крутящий момент прикладывается к выходному валу 600.
Когда низшая передача L или высшая передача Н поддерживаются, крутящий момент, который получен посредством усиления крутящего момента, выводимого из второго ЭДГ 400, на основе передаточного отношения, прикладывается к выходному валу 600. Тем не менее, когда передачи переключаются, крутящий момент, на который оказывают влияние перегрузочные способности по крутящему моменту тормозов 561 и 562, и крутящий момент инерции, обусловленный изменением скорости вращения, прикладывается к выходному валу 600. Крутящий момент, который прикладывается к выходному валу 600, является положительным крутящим моментом, когда второй ЭДГ 400 находится в ведущем состоянии, и является отрицательным крутящим моментом, когда второй ЭДГ 400 находится в ведомом состоянии.
В варианте осуществления изобретения гибридное транспортное средство движется в одном из первого режима стабилизации скорости, в котором гибридное транспортное средство движется с использованием только мощности приведения в движение, генерируемой посредством двигателя 1000, второго режима стабилизации скорости, в котором двигатель 1000 остановлен, и гибридное транспортное средство движется с использованием только мощности приведения в движение, генерируемой посредством второго ЭДГ 400, и третьего режима стабилизации скорости, в котором гибридное транспортное средство движется с использованием как мощности приведения в движение, генерируемой посредством двигателя 1000, так и мощности приведения в движение, генерируемой посредством второго ЭДГ 400. Режим стабилизации скорости выбирается на основе различных параметров, таких как величина нажатия педали акселератора и оставшаяся емкость модуля 700 накопления.
Технология, известная в области техники, которая относится к гибридным транспортным средствам, может использоваться для того, чтобы формировать способ выбора режима стабилизации скорости. Следовательно, подробное описание способа выбора режима стабилизации скорости не предусмотрено ниже. Помимо этого, число режимов стабилизации скорости не ограничено тремя.
Двигатель 1000 описывается подробнее со ссылкой на фиг.4. Двигателем 1000 является восьмицилиндровый V-образный двигатель, включающий в себя "А"-группу 1010 и "В"-группу 1012, каждая из которых имеет четыре цилиндра. Отметим, что могут использоваться двигатели, отличные от восьмицилиндрового V-образного двигателя.
Воздух, который прошел через воздушный фильтр 1020, подается в двигатель 1000. Дроссельный клапан 1030 регулирует объем воздуха, подаваемого в двигатель 1000. Дроссельный клапан 1030 является дроссельным клапаном с электронным управлением, который приводится посредством электродвигателя.
Воздух вводится в цилиндр 1040 через впускной канал 1032.
Воздух затем смешивается с топливом в цилиндре 1040 (камера сгорания). Топливо впрыскивается под давлением из инжектора 1050 непосредственно в цилиндр 1040. А именно, отверстие для впрыска инжектора 1050 размещено в цилиндре 1040.
Топливо впрыскивается под давлением в цилиндр 1040 в такте впуска. Время, в которое впрыскивается под давлением топливо, не обязательно должно быть в такте впуска. Описание варианта осуществления изобретения предоставляется при допущении, что двигатель 1000 является двигателем с непосредственным впрыском топлива, причем отверстие для впрыска инжектора 1050 размещается в цилиндре 1040. В дополнение к инжектору 1050 для непосредственного впрыска может быть предоставлен инжектор для впрыска во впускной коллектор. Альтернативно может быть предоставлен только инжектор для впрыска во впускной коллектор.
Топливно-воздушная смесь в цилиндре 1040 поджигается посредством свечи зажигания 1060 и затем сгорает. Сгоревшая топливно-воздушная смесь, а именно отработанный газ, очищается посредством трехкомпонентного катализатора 1070 и затем выпускается за пределы транспортного средства. К поршеню 1080 прикладывается давление от сгорания топливно-воздушной смеси, за счет чего коленчатый вал 1090 вращается.
Впускной клапан 1100 и выпускной клапан 1110 предусмотрены на верхней поверхности цилиндра 1040. Впускной клапан 1100 приводится в движение посредством впускного распределительного вала 1120, а выпускной клапан 1110 приводится в движение посредством выпускного распределительного вала 1130. Впускной распределительный вал 1120 и выпускной распределительный вал 1130 соединены друг с другом, например, посредством цепи или зубчатой передачи и вращаются на одной скорости вращения. Поскольку число оборотов (типично, число оборотов в минуту (об/мин)) вращающегося корпуса, например, вала обычно упоминается в качестве скорости вращения, термин "скорость вращения" используется в последующем описании.
Фаза (распределение фаз открытия/закрытия) впускного клапана 1100 управляется посредством впускного VVT-механизма 2000, который прикреплен к впускному распределительному валу 1120. Фаза (распределение фаз открытия/закрытия) выпускного клапана 1110 управляется посредством выпускного VVT-механизма 3000, который прикреплен к выпускному распределительному валу 1130.
В варианте осуществления изобретения впускной распределительный вал 1120 и выпускной распределительный вал 1130 вращаются посредством VVT-механизмов 2000 и 3000 соответственно, посредством чего управляется фаза впускного клапана 1100 и фаза выпускного клапана 1110. Тем не менее способ для управления фазой впускного клапана 1100 не ограничен этим.
Впускной VVT-механизм 2000 работает от электродвигателя 2060 (не показан на фиг.4). Электродвигатель 2060 управляется посредством ЭМУ 100. Величина электрического тока, проходящего через электродвигатель 2060, определяется посредством амперметра (не показан), а напряжение, прикладываемое к электродвигателю 2060, определяется посредством вольтметра (не показан), и сигнал, указывающий величину электрического тока, и сигнал, указывающий напряжение, передаются в ЭМУ 100.
Выпускной VVT-механизм 3000 имеет гидравлическое управление. Отметим, что впускной VVT-механизм 2000 может иметь гидравлическое управление. Отметим, что выпускной VVT-механизм 3000 может работать от электродвигателя.
ЭМУ 100 принимает сигналы, указывающие скорость вращения и угол поворота коленчатого вала 1090, от датчика 5000 угла поворота коленчатого вала. ЭМУ 100 также принимает сигнал, указывающий фазу впускного распределительного вала 1120, и сигнал, указывающий фазу выпускного распределительного вала 1130 (позиции этих распределительных валов в направлении вращения), от датчика 5010 положения кулачка. Другими словами, ЭМУ 100 принимает сигнал, указывающий фазу впускного клапана 1100, и сигнал, указывающий фазу выпускного клапана 1110, от датчика 5010 положения кулачка. Помимо этого, ЭМУ 100 принимает сигнал, указывающий скорость вращения впускного распределительного вала 1120, и сигнал, указывающий скорость вращения выпускного распределительного вала 1130, от датчика 5010 положения кулачка.
Помимо этого, ЭМУ 100 принимает сигнал, указывающий температуру охлаждающей жидкости или хладагента для двигателя 1000 (температуру охлаждающей жидкости), от датчика 5020 температуры охлаждающей жидкости, и сигнал, указывающий объем воздуха, содержащегося в двигателе 1000, от расходомера воздуха 5030.
Дополнительно ЭМУ 100 принимает сигнал, указывающий скорость вращения выходного вала электродвигателя 2060, от датчика 5040 скорости вращения.
ЭМУ 100 управляет величиной открытия дроссельного клапана, распределением зажигания, распределением фаз впрыска топлива, величиной впрыска топлива, фазой впускного клапана 1100, фазой выпускного клапана 1110 и т.д. на основе сигналов, принимаемых от вышеупомянутых датчиков, и карт и программ, которые сохранены в запоминающем устройстве (не показано), так что двигатель 1000 переводится в требуемый рабочий режим.
Согласно варианту осуществления изобретения ЭМУ 100 задает фазу впускного клапана 1100 на основе карты, которая использует частоту NE вращения двигателя и величину KL всасываемого воздуха в качестве параметров, как показано на фиг.5. Несколько карт, используемых для того, чтобы задавать фазу впускного клапана 1100 при нескольких температурах охлаждающей жидкости, сохранены в запоминающем устройстве.
Далее, впускной VVT-механизм 2000 описывается подробнее. Отметим, что выпускной VVT-механизм 3000 может иметь такую же структуру, как впускной VVT-механизм 2000, описанный ниже.
Как показано на фиг.6, впускной VVT-механизм 2000 включает в себя звездочку 2010, кулачковую шайбу 2020, рычажные механизмы 2030, направляющую пластину 2040, редуктор 2050 и электродвигатель 2060.
Звездочка 2010 соединена с коленчатым валом 1090, например, через цепь. Скорость вращения звездочки 2010 составляет половину от скорости вращения коленчатого вала 1090. Впускной распределительный вал 1120 предоставляется таким образом, что впускной распределительный вал 1120 является соосным с осью вращения звездочки 2010 и поворачивается относительно звездочки 2010.
Кулачковая шайба 2020 соединена с впускным распределительным валом 1120 с помощью первого штифта 2070. В звездочке 2010 кулачковая шайба 2020 вращается вместе с впускным распределительным валом 1120. Кулачковая шайба 2020 и впускной распределительный вал 1120 могут быть сформированы неразъемно друг с другом.
Каждый рычажный механизм 2030 сформирован из первого рычага 2031 и второго рычага 2032. Как показано на фиг.7, т.е. вид в поперечном разрезе по линии VII-VII с фиг.6, соединенные первые рычаги 2031 размещены в звездочке 2010 так, чтобы быть симметричными относительно оси вращения впускного распределительного вала 1120. Каждый первый рычаг 2031 соединен со звездочкой 2010 так, чтобы поворачиваться вокруг второго штифта 2072.
Как показано на фиг.8, т.е. вид в поперечном разрезе по линии VIII-VIII с фиг.6 и фиг.9, который показывает состояние, достигаемое посредством продвижения фазы впускного клапана 1100 из состояния, показанного на фиг.8, первые рычаги 2031 и кулачковая шайба 2020 соединены друг с другом посредством вторых рычагов 2032.
Каждый второй рычаг 2032 поддерживается так, чтобы поворачиваться вокруг третьего штифта 2074 относительно первого рычага 2031. Каждый второй рычаг 2032 поддерживается так, чтобы поворачиваться вокруг четвертого штифта 2076 относительно кулачковой шайбы 2020.
Впускной распределительный вал 1120 вращается относительно звездочки 2010 посредством пары рычажных механизмов 2030, посредством чего фаза впускного клапана 1100 изменяется. Соответственно, даже если один из рычажных механизмов 2030 выходит из строя и зажимается, фаза впускного клапана 1100 изменяется посредством другого рычажного механизма 2030.
Снова ссылаясь на фиг.6, управляющий штифт 2034 прикреплен к одной лицевой поверхности каждого рычажного механизма 2030 (более конкретно, второго рычага 2032), причем эта лицевая поверхность является ближней к направляющей пластине 2040. Управляющий штифт 2034 размещен соосно с третьим штифтом 2074. Каждый управляющий штифт 2034 плавно перемещается в пределах направляющей канавки 2042, сформированной в направляющей пластине 2040.
Каждый управляющий штифт 2034 перемещается в радиальном направлении при плавном перемещении в пределах направляющей канавки 2042, сформированной в направляющей пластине 2040. Перемещение каждого управляющего штифта 2034 в радиальном направлении поворачивает впускной распределительный вал 1120 относительно звездочки 2010.
Как показано на фиг.10, т.е. вид в поперечном разрезе по линии Х-Х с фиг.6, направляющая канавка 2042 сформирована спиральным способом так, что управляющий штифт 2034 перемещается в радиальном направлении в соответствии с вращением направляющей пластины 2040. Тем не менее форма направляющей канавки 2042 не ограничена этим.
По мере того как расстояние между управляющим штифтом 2034 и осью направляющей пластины 2040 увеличивается в радиальном направлении, фаза впускного клапана 1100 все больше запаздывает.
А именно, величина изменения фазы соответствует величине, на которую каждый рычажный механизм 2030 срабатывает в соответствии с перемещением управляющего штифта 2034 в радиальном направлении. Отметим, что по мере того как расстояние между управляющим штифтом 2034 и осью направляющей пластины 2040 увеличивается в радиальном направлении, фаза впускного клапана 1100 может быть все более ранней.
Как показано на фиг.10, когда управляющий штифт 2034 достигает конца направляющей канавки 2042, действие рычажного механизма 2030 ограничивается. Соответственно, фаза, при которой управляющий штифт 2034 достигает конца направляющей канавки 2042, является механически определенной наиболее ранней фазой или механически определенной наиболее поздней фазой впускного клапана 1100.
Снова ссылаясь на фиг.6, несколько пазов 2044 сформировано в одной лицевой поверхности направляющей пластины 2040, причем эта лицевая поверхность является ближней к редуктору 2050. Пазы 2044 используются для того, чтобы соединять направляющую пластину 2040 и редуктор 2050 друг с другом.
Редуктор 2050 сформирован из шестерни 2052 внешнего зацепления и шестерни 2054 внутреннего зацепления. Шестерня 2052 внешнего зацепления крепится к звездочке 2010 так, чтобы вращаться вместе со звездочкой 2010.
Несколько выступов 2056, которые вставляются в пазы 2044 направляющей пластины 2040, сформированы на шестерне 2054 внутреннего зацепления. Шестерня 2054 внутреннего зацепления поддерживается так, чтобы вращаться вокруг эксцентриковой оси 2066 соединительной муфты 2062, ось которой отклоняется от оси 2064 выходного вала электродвигателя 2060.
Фиг.11 показывает вид в поперечном разрезе по линии XI-XI с фиг.6. Шестерня 2054 внутреннего зацепления размещается таким образом, что часть из ее нескольких зубцов зацепляется с шестерней 2052 внешнего зацепления. Когда скорость вращения выходного вала электродвигателя 2060 равна скорости вращения звездочки 2010, соединительная муфта 2062 и шестерня 2054 внутреннего зацепления вращаются на той же скорости вращения, что и шестерня 2052 внешнего зацепления (звездочка 2010). В этом случае направляющая пластина 2040 вращается на той же скорости вращения, что и звездочка 2010, и фаза впускного клапана 1100 поддерживается.
Когда соединительная муфта 2062 вращается вокруг оси 2064 относительно шестерни 2052 внешнего зацепления посредством электродвигателя 2060, вся шестерня 2054 внутреннего зацепления проворачивает вокруг оси 2064 и, в то же самое время, шестерня 2054 внутреннего зацепления вращается вокруг эксцентриковой оси 2066. Вращательное движение шестерни 2054 внутреннего зацепления заставляет направляющую пластину 2040 вращаться относительно звездочки 2010, посредством чего фаза впускного клапана 1100 изменяется.
Фаза впускного клапана 1100 изменяется посредством уменьшения относительной скорости вращения (рабочего параметра электродвигателя 2060) между выходным валом электродвигателя 2060 и звездочкой 2010 с использованием редуктора 2050, направляющей пластины 2040 и рычажных механизмов 2030.
Альтернативно фаза впускного клапана 1100 может быть изменена посредством увеличения относительной скорости вращения между выходным валом электродвигателя 2060 и звездочкой 2010.
Как описано выше, с помощью VVT-механизма 2000 согласно варианту осуществления изобретения, фаза впускного клапана 1100 изменяется с использованием скорости вращения электродвигателя 2060 относительно скорости вращения звездочки 2010, т.е. разности между скоростью вращения электродвигателя 2060 и скоростью вращения звездочки 2010 (в основном, идентичной скорости вращения впускного распределительного вала 1120) в качестве рабочего параметра привода.
Как показано на фиг.12, коэффициент снижения скорости, который элементы впускного VVT-механизма 2000 реализуют совместно, а именно отношение относительной скорости вращения между выходным валом электродвигателя 2060 и звездочкой 2010 к величине изменения фазы впускного клапана 1100, может принимать значение, соответствующее фазе впускного клапана 1100. Согласно варианту осуществления изобретения по мере того как коэффициент снижения скорости увеличивается, величина изменения фазы относительно относительной скорости вращения между выходным валом электродвигателя 2060 и звездочкой 2010 уменьшается.
Когда фаза впускного клапана 1100 находится в пределах области запаздывания, которая идет от наиболее поздней фазы до СА1, коэффициент снижения скорости, который элементы впускного VVT-механизма 2000 реализуют совместно, составляет R1. Когда фаза впускного клапана 1100 находится в пределах области опережения, которая идет от СА2 (СА2 - это фаза, которая наиболее опережает СА1) до наиболее опережающей фазы, коэффициент снижения скорости, который элементы впускного VVT-механизма 2000 реализуют совместно, составляет R2 (R1>R2).
Когда фаза впускного клапана 1100 находится в пределах промежуточной области, которая идет от СА1 до СА2, коэффициент снижения скорости, который элементы впускного VVT-механизма 2000 реализуют совместно, изменяется с заданной интенсивностью ((R2-R1)/(CA2-CA1)).
Результаты работы впускного VVT-механизма 2000 механизма регулируемых фаз газораспределения описываются далее.
Когда фаза впускного клапана 1100 (впускного распределительного вала 1120) ранняя, электродвигатель 2060 работает так, чтобы вращать направляющую пластину 2040 относительно звездочки 2010. Как результат, фаза впускного клапана 1100 становится ранней, как показано на фиг.13.
Когда фаза впускного клапана 1100 находится в рамках области запаздывания, которая идет от наиболее поздней фазы до СА1, относительная скорость вращения между выходным валом электродвигателя 2060 и звездочкой 2010 снижается согласно коэффициенту R1 снижения скорости. Как результат, фаза впускного клапана 1100 становится ранней.
Когда фаза впускного клапана 1100 находится в рамках области опережения, которая идет от СА2 до наиболее опережающей фазы, относительная скорость вращения между выходным валом электродвигателя 2060 и звездочкой 2010 снижается согласно коэффициенту R2 снижения скорости. Как результат, фаза впускного клапана 1100 становится ранней.
Когда фаза впускного клапана 1100 запаздывает, выходной вал электродвигателя 2060 вращается относительно звездочки 2010 в направлении, противоположном направлению, в котором фаза впускного клапана 1100 является ранней. Когда фаза запаздывает, относительная скорость вращения между выходным валом электродвигателя 2060 и звездочкой 2010 уменьшается способом, аналогичным тому, когда фаза является ранней. Когда фаза впускного клапана 1100 находится в рамках области 6001 запаздывания, которая идет от наиболее поздней фазы до СА1, относительная скорость вращения между выходным валом электродвигателя 2060 и звездочкой 2010 снижается согласно коэффициенту R1 снижения скорости. Как результат, фаза запаздывает. Когда фаза впускного клапана 1100 находится в рамках области опережения, которая идет от СА2 до наиболее опережающей фазы, относительная скорость вращения между выходным валом электродвигателя 2060 и звездочкой 2010 снижается согласно коэффициенту R2 снижения скорости. Как результат, фаза запаздывает.
Соответственно, до тех пор, пока направление относительного вращения между выходным валом электродвигателя 2060 и звездочкой 2010 остается неизмененным, фаза впускного клапана 1100 может быть ранней или запаздывать как в области 6001 запаздывания, которая идет от наиболее поздней фазы до СА1, так и в области 6002 опережения, которая идет от СА2 до наиболее ранней фазы. В этом случае, в области 6002 опережения, которая идет от СА2 до наиболее ранней фазы, фаза становится ранней или запаздывает на величину, превышающую величину в области запаздывания, которая идет от наиболее поздней фазы до СА1. Соответственно, область 6002 опережения является более широкой по ширине изменения фазы, чем область 6001 запаздывания.
В области 6001 запаздывания, которая идет от наиболее поздней фазы до СА1, коэффициент снижения скорости является высоким. Соответственно, высокий крутящий момент требуется для того, чтобы вращать выходной вал электродвигателя 2060 с использованием крутящего момента, связанного с впускным распределительным валом 1120, в соответствии с работой двигателя 1000. Следовательно, даже когда электродвигатель 2060 не формирует крутящий момент, например, даже когда электродвигатель 2060 остановлен, вращение выходного вала электродвигателя 2060, которое вызывается посредством крутящего момента, прикладываемого к впускному распределительному валу 1120, ограничено. Это ограничивает отклонение фактической фазы от фазы, используемой при управлении.
Следовательно, если фаза впускного клапана, когда двигатель останавливается, находится в рамках области 6001 запаздывания, в которой уменьшение скорости является высоким, даже когда выходной вал электродвигателя 2060 вращается посредством силы реакции, формируемой посредством впускного распределительного вала 1120, когда двигатель остановлен, можно предотвращать случайное изменение фазы впускного клапана, т.е. отклонение фактической фазы от фазы, используемой при управлении. Наоборот, чтобы предотвращать такое изменение фазы впускного клапана, необходимо надежно задавать фазу впускного клапана, когда двигатель останавливается, в области 6001 запаздывания, в которой коэффициент снижения скорости является высоким.
В общем, в гибридном транспортном средстве, частота, с которой двигатель запускается в то время, когда транспортное средство движется, является высокой, поскольку двигатель 1000 может включаться периодически в то время, когда транспортное средство движется. Следовательно, фаза клапана, когда двигатель запущен, а именно целевая фаза, которая используется, когда двигатель остановлен, задается равной наиболее поздней фазе, чтобы выполнять управление снижения давления в период пуска (так называемое управление декомпрессией) для уменьшения толчка, который, вероятно, возникает, когда двигатель запускается. Следовательно, предпочтительно задавать коэффициент снижения скорости, который используется в области 6001 запаздывания, равным высокому значению.
Когда фаза впускного клапана 1100 находится в пределах промежуточной области 6003, которая идет от СА1 до СА2, относительная скорость вращения между выходным валом электродвигателя 2060 и звездочкой 2010 уменьшается согласно коэффициенту снижения скорости, который изменяется с заданной интенсивностью. Как результат, фаза впускного клапана 1100 становится ранней или запаздывает.
Когда фаза впускного клапана 1100 смещается из области запаздывания в область опережения или из области опережения в область запаздывания, величина изменения фазы относительно относительной скорости вращения между выходным валом электродвигателя 2060 и звездочкой 2010 постепенно увеличивается или уменьшается. Соответственно, резкое пошаговое изменение величины изменения фазы ограничивается так, чтобы ограничивать резкое изменение фазы. Как результат, фаза впускного клапана 1100 управляется более точно.
В области 6001 запаздывания, в которой коэффициент снижения скорости является относительно высоким, труднее передавать вращающую силу с выходного вала электродвигателя 2060 и звездочки 2010 на внутреннюю часть впускного VVT-механизма 2000, чем в области 6002 опережения, в которой коэффициент снижения скорости является относительно низким. Соответственно, когда фаза впускного клапана 1100 находится в рамках области 6001 запаздывания, скорость работы каждого механизма в VVT-механизме 2000, является относительно низкой. Следовательно, в области 6001 запаздывания, шум при работе VVT-механизма 2000 подавляется до уровня, ниже уровня в области 6002 опережения и промежуточной области 6003.
Фиг.14 является блок-схемой, иллюстрирующей конфигурацию управления, выполняемого для механизма регулируемых фаз газораспределения согласно варианту осуществления изобретения. Каждый блок, показанный на фиг.14, реализуется посредством ЭМУ 100 с помощью либо аппаратных средств, либо программного обеспечения.
Как показано на фиг.14, модуль 150 управления фазой клапана задает значение Nmref команды скорости вращения для электродвигателя 2060, который выступает в качестве привода, на основе отклонения ΔСА фактической фазы СА клапана от целевой фазы CAr для впускного клапана 1100.
Модуль 150 управления фазой клапана включает в себя модуль 152 определения фазы клапана, модули 154 и 160 вычисления, модуль 156 вычисления требуемой разности скоростей вращения и модуль 158 определения скорости вращения распределительного вала.
Модуль 152 определения фазы клапана вычисляет текущую фазу СА клапана для впускного клапана 1100 на основе сигналов от датчика 5000 угла поворота коленчатого вала и датчика 5010 положения кулачка (сигнала угла поворота коленчатого вала и сигнала угла кулачка) или скорости электродвигателя, определенной посредством датчика 5040 скорости вращения для электродвигателя 2060.
Модуль 152 определения фазы клапана определяет текущую фазу СА клапана на основе сигнала угла поворота коленчатого вала и сигнала угла кулачка от датчиков, описанных выше, например, посредством преобразования запаздывания между выдачей сигнала угла кулачка и выдачей сигнала угла поворота коленчатого вала в сдвиг фаз вращения между коленчатым валом 1090 и впускным распределительным валом 1120.
Альтернативно с впускным VVT-механизмом 2000 согласно варианту осуществления изобретения величина Δθ изменения фазы клапана в течение времени ΔТ может быть отслежена на основе рабочей величины (разности скоростей вращения ΔNm) электродвигателя 2060, который выступает в качестве привода, согласно уравнению 1. В уравнении 1 R(θ) обозначает коэффициент снижения скорости, показанный на фиг.12, который изменяется в соответствии с фазой впускного клапана.

Следовательно, модуль 152 определения фазы клапана может обнаруживать текущую фазу СА клапана посредством интегрирования величин Δθ изменения фазы, вычисленных согласно уравнению 1.
Модуль 154 вычисления вычисляет девиацию ΔСА фазы для текущей фазы СА клапана, определенной посредством модуля 152 определения фазы клапана, от целевой фазы CAr.
Модуль 156 вычисления требуемой разности скоростей вращения вычисляет разность ΔNm скоростей вращения между скоростью вращения выходного вала электродвигателя 2060 и скоростью вращения звездочки 2010 (впускного распределительного вала 1120), которая используется для того, чтобы приближать фактическую фазу клапана к целевой фазе CAr на основе девиации ΔСА фазы, вычисленной посредством модуля 154 вычисления. Например, разность ΔNm скоростей вращения задается равной положительному значению (ΔNm>0), когда фаза впускного клапана ранняя, тогда как она задается равной отрицательному значению (ΔNm<0), когда фаза впускного клапана запаздывает. Когда текущая фаза впускного клапана сохраняется (а именно, когда Δθ=0), разность ΔNm скоростей вращения задается равной значению, практически равному нулю (ΔNm=0).
Модуль 158 определения скорости вращения распределительного вала вычисляет скорость вращения звездочки 2010, т.е. фактическую скорость IVN вращения впускного распределительного вала 1120 посредством деления скорости вращения коленчатого вала 1090 на два.
Модуль вычисления 160 вычисляет значение Nmref команды скорости вращения для электродвигателя 2060 посредством сложения фактической скорости IVN вращения впускного распределительного вала 1120, которая определена посредством модуля 158 определения скорости вращения распределительного вала, и разности ΔNm скоростей вращения, которая задана посредством модуля 156 вычисления требуемой разности скоростей вращения. Сигнал, указывающий значение Nmref команды скорости вращения, передается в электронное задающее устройство (EDU) 4000.
EDU 4000 выполняет управление скоростью вращения для управления работой электродвигателя 2060 согласно значению Nmref команды скорости вращения. Например, EDU 4000 включает в себя модуль 190 задания продолжительности включения, который задает продолжительность DTY включения на основе значения Nmref команды скорости вращения. Модуль 190 задания продолжительности включения принимает сигнал, указывающий скорость вращения Nmt электродвигателя 2060, которая определена посредством датчика 5040 скорости вращения. Модуль 190 задания продолжительности включения управляет продолжительностью DTY включения на основе скорости Nmt электродвигателя и значения Nmref команды скорости вращения так, чтобы скорость электродвигателя Nmt соответствовала значению Nmref команды скорости вращения.
Скважность (продолжительность) DTY включения указывает отношение длительности, в течение которой переключающий элемент (не показан) EDU 4000 включен, к циклу переключения. Электроэнергия, которая подается в электродвигатель 2060, управляется посредством управления переключающим элементом на основе продолжительности DTY включения. Например, если рабочее напряжение электродвигателя 2060 задается равным напряжению, которое соответствует продолжительности DTY включения, рабочее напряжение увеличивается, и крутящий момент, который формируется посредством электродвигателя 2060, возрастает по мере того, как продолжительность DTY включения задается равной более высокому значению. Другими словами, рабочее напряжение электродвигателя 2060 уменьшается, и крутящий момент, который формируется посредством электродвигателя 2060, снижается по мере того, как продолжительность DTY включения задается равной более низкому значению.
Вместо задания продолжительности DTY включения рабочее напряжение или рабочий ток электродвигателя 2060 может быть непосредственно задан посредством EDU 4000 на основе скорости Nmt электродвигателя и значения Nmref команды скорости вращения. В этом случае, управление скоростью вращения может быть выполнено посредством приведения в действие электродвигателя 2060 при заданном рабочем напряжении или заданном рабочем токе.
Далее поясняется способ, которым задается целевая фаза CAr для впускного клапана 1100, который управляется посредством VVT-механизма.
Целевая фаза CAr задается посредством модуля 130 задания целевой фазы в режиме холостого хода, когда двигатель 1000 работает на холостом ходу, и задается посредством модуля 140 задания целевой фазы, когда двигатель 1000 не работает на холостом ходу. Когда двигатель 1000 работает на холостом ходу, модуль 170 переключения передает сигнал, указывающий целевую фазу CAr, заданную посредством модуля 130 задания целевой фазы в режиме холостого хода, в модуль 150 управления фазой клапана. С другой стороны, когда двигатель 1000 не работает на холостом ходу, модуль 170 переключения передает сигнал, указывающий целевую фазу CAr, заданную посредством модуля 140 задания целевой фазы, в модуль 150 управления фазой клапана.
Модуль 140 задания целевой фазы задает целевую фазу CAr для впускного клапана 1100 на основе состояния двигателя 1000, например, на основе частоты NE вращения двигателя и объема KL воздуха согласно карте, показанной на фиг.5.
Модуль 130 задания целевой фазы в режиме холостого хода переменно задает целевую фазу на основе целевой скорости вращения (целевой скорости на холостом ходу) NIr для двигателя 1000, которая используется, когда двигатель 1000 работает на холостом ходу, и которая задается посредством модуля 110 задания целевой скорости на холостом ходу.
Модуль 110 задания целевой скорости на холостом ходу задает целевую скорость NIr на холостом ходу на основе состояния транспортного средства, когда определено то, что величина, на которую водитель нажимает педаль акселератора, становится равной нулю, и двигатель 1000 работает на холостом ходу.
Например, модуль 110 задания целевой скорости на холостом ходу переменно задает целевую скорость NIr на холостом ходу на основе положения переключения и диапазона переключений, выбранного водителем. Более конкретно, когда положение переключений передач или диапазон переключений, который дает возможность транспортному средству перемещаться (типично, D-диапазон или R-диапазон), выбран, целевая скорость NIr на холостом ходу задается равной относительно высокому значению (например, приблизительно 1000 об/мин), чтобы подготовиться к движению транспортного средства на постоянной скорости. С другой стороны, когда положение переключений передач или диапазон переключений, который дает возможность транспортному средству начинать движение сразу (типично, Р-диапазон или N-диапазон), не выбран, целевая скорость на холостом ходу NIr задается равной относительно низкому значению (например, приблизительно 850 об/мин), чтобы повышать КПД сгорания топлива.
Модуль 120 ИСХХ (управление скоростью на холостом ходу) управляет двигателем 1000 так, чтобы частота вращения двигателя соответствовала целевой скорости NIr на холостом ходу, которая задана посредством модуля 110 задания целевой скорости на холостом ходу. Как правило, модуль 120 ИСХХ управляет объемом воздуха, содержащегося в двигателе 1000. Объем всасываемого воздуха управляется посредством управления величиной открытия дроссельного клапана 1030 или управления величиной подъема, когда впускной клапан 1100 оснащен механизмом изменения величины подъема. Альтернативно, когда двигатель 1000 является, например, дизельным двигателем, скорость на холостом ходу может управляться посредством управления количеством топлива, впрыскиваемого под давлением из инжектора 1050.
Когда двигатель 1000 работает на холостом ходу, модуль 130 задания целевой фазы в режиме холостого хода задает целевую фазу CAr на основе сравнения между целевой скоростью NIr на холостом ходу и заданной скоростью вращения. Например, заданная скорость вращения задается равной значению между вышеописанными двумя целевыми скоростями NIr на холостом ходу, чтобы отличать их друг от друга.
Как показано на фиг.15, когда целевая скорость NIr на холостом ходу равна или выше заданной скорости вращения, модуль 130 задания целевой фазы в режиме холостого хода задает целевую фазу CAr для впускного клапана 1100, который управляется посредством VVT-механизма 2000, равной фазе CAi, при которой оптимальное состояние сгорания достигается в двигателе 1000, когда двигатель 1000 работает на холостом ходу (CAr=CAi).
В гибридном транспортном средстве необходимо задерживать фазу клапана, когда двигатель 1000 запускается, посредством относительно большой величины, чтобы выполнять управление снижением давления для уменьшения толчка, который, вероятно, возникает, когда двигатель 1000 периодически запускается. Следовательно, в гибридном транспортном средстве фаза CAi впускного клапана может находиться за пределами области 6001 (фиг.12), в которой коэффициент снижения скорости является высоким, вследствие диапазона, в котором фазе клапана разрешено управляться посредством VVT-механизма 2000. В варианте осуществления изобретения фаза CAi находится в рамках области 6002 (фиг.12), в которой коэффициент снижения скорости является низким.
С другой стороны, когда целевая скорость на холостом ходу NIr ниже заданной скорости вращения, модуль 130 задания целевой фазы в режиме холостого хода задает целевую фазу CAr равной фазе CAi# в рамках области 6001, в которой коэффициент снижения скорости является высоким. Таким образом, диапазон, в котором фазе клапана разрешено изменяться, когда двигатель 1000 работает на холостом ходу, ограничен рамками области 6001, в которой коэффициент снижения скорости является высоким.
Как результат, в состоянии, в котором шум при работе VVT-механизма 2000 относительно легко слышит пассажир, например водитель, из-за относительно низкой целевой скорости NIr на холостом ходу и небольшого шума при работе двигателя, диапазон, в котором фазе впускного клапана 1100 разрешено изменяться, ограничен рамками области 6001, в которой коэффициент снижения скорости является высоким, и шум при работе VVT-механизма 2000 является относительно небольшим. Как результат, можно уменьшать вероятность того, что шум при работе VVT-механизма 2000 слышит водитель.
С другой стороны, в состоянии, в котором менее вероятно для водителя слышать шум при работе VVT-механизма 2000 из-за относительно высокой целевой скорости NIr на холостом ходу и большого шума при работе двигателя, можно выполнять управление фазой клапана, при которой более высокий приоритет дается повышению КПД сгорания топлива, чем подавлению шума при работе VVT-механизма 2000. Таким образом, предпочтительно задавать заданную скорость вращения с зависимостью между шумом при работе VVT-механизма 2000, когда фаза клапана управляется вне области 6001, в которой коэффициент снижения скорости является высоким, и шумом при работе двигателя 1000, который изменяется в соответствии с частотой вращения двигателя.
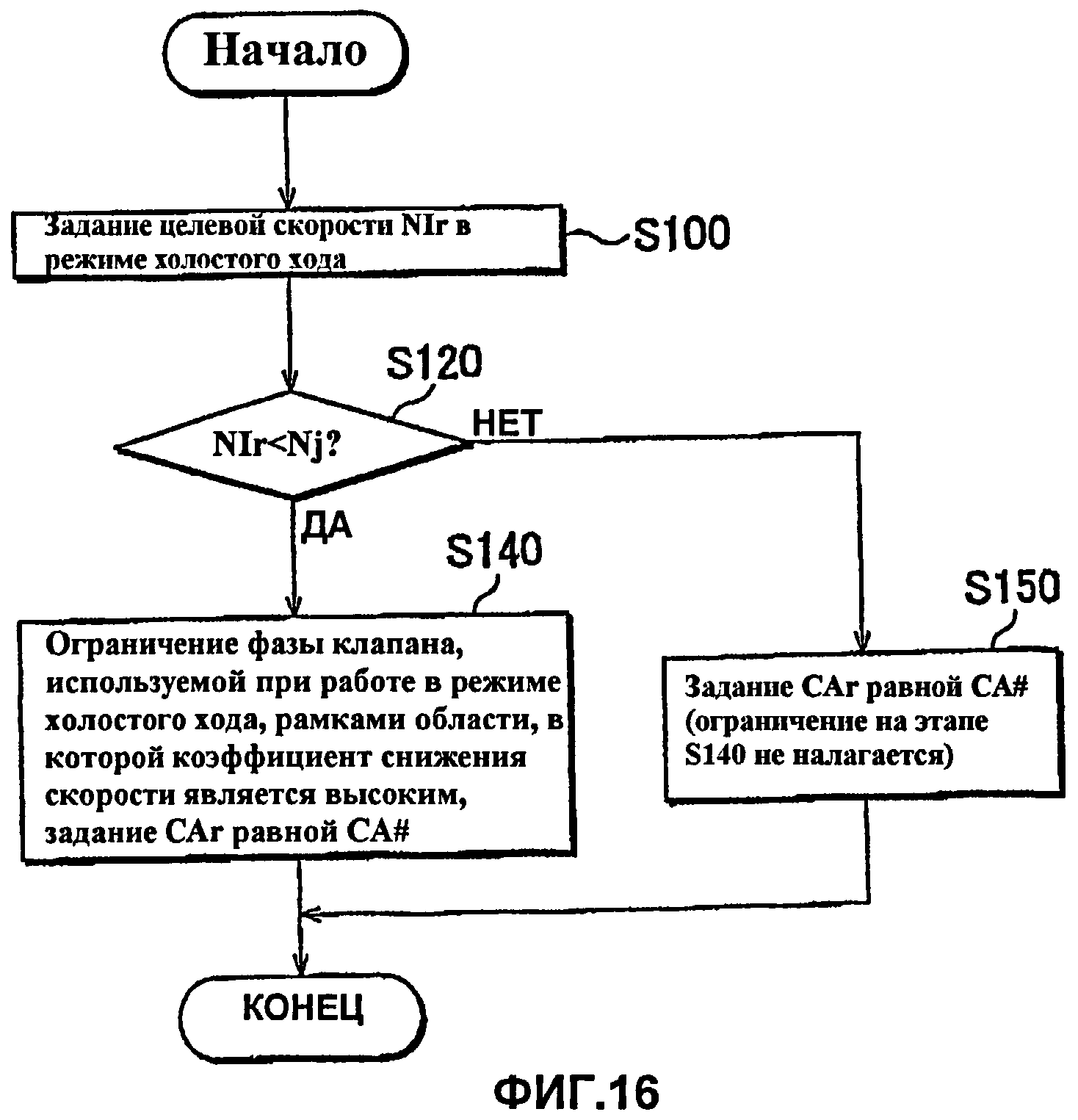
Фиг.16 является блок-схемой последовательности операций способа, согласно которому управление для задания целевой фазы для впускного клапана, который показан на фиг.14, выполняется с использованием программно-реализованного процесса, выполняемого посредством ЭМУ 100. Целевая фаза для впускного клапана используется, когда двигатель работает на холостом ходу.
Как показано на фиг.16, ЭМУ 100 задает целевую скорость NIr на холостом ходу на этапе (в дальнейшем в этом документе, называемом "S"), 100. А именно, процесс на этапе S100 соответствует функции модуля 110 задания целевой скорости на холостом ходу на фиг.14.
Помимо этого, ЭМУ 100 сравнивает целевую скорость NIr на холостом ходу с заданной скоростью Nj вращения на этапе S120. Как описано выше, предпочтительно задавать скорость Nj вращения равной значению, соответствующему нижнему предельному значению диапазона частоты вращения двигателя, при котором менее вероятно, что пассажир, например водитель, услышит шум при работе VVT-механизма 2000, когда фаза клапана управляется вне области 6001, в которой коэффициент снижения скорости является высоким.
Когда положительное определение выполнено на этапе S120, т.е. когда целевая скорость NIr на холостом ходу ниже заданной скорости Nj вращения, ЭМУ 100 ограничивает диапазон, в котором фазе клапана разрешено изменяться, когда двигатель работает на холостом ходу, рамками области 6001, в которой коэффициент снижения скорости является высоким. Как описано выше, фаза клапана ограничивается на этапе S140 посредством задания целевой фазы CAr, которая используется, когда двигатель работает на холостом ходу, равной фазе CAi# в области 6001, в которой коэффициент снижения скорости является высоким.
Между тем, когда отрицательное определение выполнено на этапе S120, т.е. когда целевая скорость NIr на холостом ходу равна или выше заданной скорости Nj вращения, ЭМУ 100 не ограничивает диапазон, в котором фазе разрешено изменяться, в отличие от этапа 3149, и задает целевую фазу CAr, при которой более высокий приоритет дается достижению более надлежащего состояния сгорания в двигателе 1000 (CAr=CAi).
А именно, процессы на этапе S120, S140 и S150 соответствуют функции модуля 130 задания целевой фазы в режиме холостого хода на фиг.14.
Как описано выше, с модулем управления для механизма регулируемых фаз газораспределения согласно варианту осуществления изобретения, когда целевая скорость на холостом ходу переменно задается на основе состояния транспортного средства, если целевая скорость на холостом ходу задается равной относительно низкому значению, и шум при работе VVT-механизма 2000 легко слышит пассажир, такой как водитель, диапазон, в котором фазе клапана разрешено изменяться, ограничен рамками области 6001, в которой область снижения скорости является высокой. Таким образом, можно исключать ситуацию, при которой шум при работе VVT-механизма 2000 слышит пассажир, такой как водитель.
С другой стороны, когда целевая скорость на холостом ходу задана равной относительно высокому значению, и менее вероятно, что водитель слышит шум при работе VVT-механизма 2000, более высокий приоритет дается КПД сгорания, которое осуществляется в двигателе 1000. Следовательно, можно надлежащим образом управлять фазой клапана без введения вышеописанного ограничения.
Фиг.17 является блок-схемой, показывающей конфигурацию управления, выполняемого посредством модуля управления для механизма регулируемых фаз газораспределения согласно модифицированному примеру варианта осуществления изобретения.
Модуль управления для механизма регулируемых фаз газораспределения согласно модифицированному примеру варианта осуществления изобретения, показанного на фиг.17, отличается от модуля управления, показанного на фиг.14, тем, что дополнительно предоставляется модуль 135 определения температуры двигателя. Модуль 135 определения температуры двигателя получает температуру Tw охлаждающей жидкости двигателя на основе сигнала, выводимого из датчика 5020 температуры охлаждающей жидкости (фиг.4), предусмотренного на двигателе 1000, и определяет то, является ли двигатель 1000 холодным, на основе сравнения между температурой Tw охлаждающей жидкости двигателя и эталонной температурой Tj. Когда температура Tw охлаждающей жидкости двигателя равна или ниже эталонной температуры Tj, модуль 135 определения температуры двигателя определяет, что двигатель 1000 является холодным, и включает флаг FC.
В случае, если флаг FC включен посредством модуля 135 определения температуры двигателя, как в случае, где целевая скорость NIr на холостом ходу, описанная выше, задается равной значению, ниже заданной скорости вращения, модуль 130 задания целевой фазы в режиме холостого хода задает целевую фазу CAr равной фазе CAi# в рамках области 6001, в которой коэффициент снижения скорости является высоким.
Таким образом, когда двигатель работает на холостом ходу будучи холодным, диапазон, в котором фазе впускного клапана 1100 разрешено изменяться, ограничен рамками области 6001, в которой коэффициент снижения скорости является высоким.
Поскольку функции и операции других блоков являются идентичными показанным на фиг.14, их подробное описание этого не предоставляется ниже.
Фиг.18 является блок-схемой последовательности операций способа, согласно которому управление для задания целевой фазы для впускного клапана, который показан на фиг.17, выполняется с использованием программно-реализованного процесса, выполняемого посредством ЭМУ 100. Целевая фаза для впускного клапана используется, когда двигатель работает на холостом ходу.
Блок-схема последовательности операций способа на фиг.18 отличается от блок-схемы последовательности операций способа на фиг.16 тем, что модуль управления для механизма регулируемых фаз газораспределения согласно модифицированному примеру варианта осуществления изобретения выполняет этапы S130 и S135 в дополнение к этапам S100, S120, S140 и S150 на фиг.16.
ЭМУ 100 получает температуру Tw охлаждающей жидкости двигателя на этапе S130 и определяет на этапе S135 то, является ли двигатель 1000 холодным, посредством определения того, является ли температура Tw охлаждающей жидкости двигателя равной или ниже эталонной температуры Tj.
Когда определено то, что двигатель 1000 является холодным ("ДА" на этапе S135), ЭМУ 100 ограничивает диапазон, в котором фазе впускного клапана 1100 разрешено изменяться, на этапе S140.
С другой стороны, когда определено то, что температура Tw охлаждающей жидкости двигателя превышает эталонную температуру Tj ("НЕТ" на этапе S135, т.е. когда двигатель 1000 является прогретым), ЭМУ 100 выполняет этап S150, если целевая скорость NIr на холостом ходу равна или выше заданной скорости Nj вращения. Таким образом, диапазон, в котором фазе впускного клапана 1100 разрешено изменяться, не ограничен.
Как описано со ссылкой на фиг.12, фаза впускного клапана, когда двигатель останавливается, должна быть в рамках области 6001, в которой коэффициент снижения скорости является высоким, чтобы предотвращать случайное изменение фазы впускного клапана. Следовательно, когда команда, чтобы останавливать двигатель, выдается автоматически или в ответ на операцию, выполняемую водителем в то время, когда двигатель работает на холостом ходу, фаза впускного клапана 1100 должна быть переведена в область 6001 посредством VVT-механизма 2000, к тому времени, когда двигатель фактически остановлен. Тем не менее, когда двигатель 1000 является холодным, есть возможность того, что фаза клапана не изменяется на достаточную величину посредством VVT-механизма 2000 вследствие увеличения трения в каждой части, в отличие от случая, когда двигатель является прогретым и обеспечивается достаточная смазка.
Следовательно, с модулем управления для механизма регулируемых фаз газораспределения согласно модифицированному примеру варианта осуществления изобретения, когда двигатель 1000 является холодным, диапазон, в котором фазе клапана разрешено изменяться, ограничен рамками области 6001, в которой коэффициент снижения скорости является высоким. Таким образом, можно надежно исключать ситуацию, при которой фаза случайно изменяется, например, фактическая фаза клапана отклоняется от фазы, используемой при управлении.
С модулем управления для механизма регулируемых фаз газораспределения согласно модифицированному примеру варианта осуществления изобретения целевая фаза CAr клапана, которая используется, когда двигатель работает на холостом ходу, задается на основе как целевой скорости на холостом ходу, так и температуры охлаждающей жидкости двигателя (когда двигатель является холодным/когда двигатель не является холодным). Тем не менее целевая фаза клапана CAr, которая используется, когда двигатель работает на холостом ходу, может быть задана только на основе температуры охлаждающей жидкости двигателя (когда двигатель является холодным/когда двигатель не является холодным).
Вариант осуществления изобретения, который описан в подробном описании, должен рассматриваться во всех отношениях как иллюстративный, а не ограничивающий. Объем изобретения задается посредством формулы изобретения, и все изменения, которые находятся в пределах смысла и диапазона эквивалентности формулы изобретения, следовательно, имеют намерение быть включенными в данный документ.
Реферат
Модуль задания целевой фазы в режиме холостого хода переменно задает целевую фазу на основе целевой скорости на холостом ходу, которая задается посредством модуля задания целевой скорости на холостом ходу. В частности, когда целевая скорость на холостом ходу ниже заданной скорости вращения и шум при работе механизма регулируемых фаз газораспределения без труда слышит, например, водитель, модуль задания целевой фазы в режиме холостого хода задает целевую фазу так, чтобы диапазон, в котором фазе клапана разрешено изменяться, ограничивался рамками области фазы, где коэффициент снижения скорости является высоким, и шум при работе являлся относительно низким. Дан вариант выполнения модуля управления и варианты способа управления для механизма регулируемых фаз газораспределения. Такое выполнение позволяет управлять фазой клапана, когда двигатель работает на холостом ходу. 4 н. и 18 з.п. ф-лы, 18 ил.
Формула
модуль задания целевой скорости на холостом ходу, который переменно задает целевую скорость холостого хода для двигателя внутреннего сгорания, которая используется, когда двигатель внутреннего сгорания работает на холостом ходу, на основе состояния транспортного средства; и модуль ограничения фазы, который ограничивает диапазон, в котором распределение фаз открытия/закрытия изменяется посредством механизма регулируемых фаз газораспределения, рамками первой области, когда целевая скорость холостого хода, которая задана посредством модуля задания целевой скорости холостого хода, ниже заданной скорости вращения.
модуль определения температуры, который определяет, является ли температура двигателя внутреннего сгорания равной или ниже заданной эталонной температуры; и
модуль ограничения фазы, который ограничивает диапазон, в котором распределение фаз открытия/закрытия изменяется посредством механизма регулируемых фаз газораспределения, рамками первой области, когда определено, что температура двигателя внутреннего сгорания равна или ниже заданной эталонной температуры, в то время как двигатель внутреннего сгорания работает на холостом ходу.
ограничивают диапазон, в котором распределение фаз открытия/закрытия изменяется посредством механизма регулируемых фаз газораспределения, рамками первой области, когда целевая скорость на холостом ходу для двигателя внутреннего сгорания ниже заданной скорости вращения, в то время когда 'двигатель внутреннего сгорания работает на холостом ходу.
определяют, является ли температура двигателя внутреннего сгорания равной или ниже заданной эталонной температуры; и
ограничивают диапазон, в котором распределение фаз открытия/закрытия изменяется посредством механизма регулируемых фаз газораспределения, рамками первой области, когда определено, что температура двигателя внутреннего сгорания равна или ниже заданной эталонной температуры, в то время как двигатель внутреннего сгорания работает на холостом ходу.
Комментарии