Тяговый линейный синхронный электропривод для маршрутной единицы подвижного состава - SU563904A3
Код документа: SU563904A3
Чертежи
Описание
НИЛ1И своими концами к стациоиарпсму источннку переменного тока, и возбудитель которого размещен иа маршрутной единице подвижного соетава со.вместно с электромагнитом ее подвешивания.
Однако электромеханические вибрации или колебания, возникающие при движении маршрутной единицы, отрицательно сказываются на удобстве поездки и могут привести к выходу из строя электропривода.
Целью изобретения является демпфирование электромеханических колебаний при двнженнн маршрутной единицы.
Это доетнгается тем, что тяговый лцнейный синхронный электропривод снабжен включенным между стационарным источником переменного тока и обмоткой 6eryniero магнитного ноля силовым регулятором, моиь ность которого меньше максимальной мощности линейиого синхронного электроиривода, блоком регулирования фазового сдвига и аМНлнтуды выходного напряжения силового егулятора и датчиком колебаний мощности линейного сннхронного электропривода, а к выходу датчика колебаний мощности линейного синхроиного электропривода подключен вход влока регулирования фазового сдвига и амплитуды выходного напряжения силового регулятора.
Силовой регулятор может быть выполиеп в виде уп|равляемого статического преобразователя частоты.
Тяговый линейный синхронный электропривод может быть спабжен трансформатором , включенным между стационарным источником перемопного тока и входом управляемого статического преобразователя частоты , а си лозой регулятор может быть снабжен другим транеформатором, первичная обмотка которого подключена к выходу управляемого статического преобразователя частоты, а вторичная - включена между стационарным источником переменного тока и обмоткой бегущего магннтиого поля, примем выход силового регулятора может быть подключен к другому концу обмотки бегуи1его магнитного поля.
Силовой регулятор может быть также выполнен в впде поворотного трансформатора, к сервоприводу которого подключен выход блока регу.тирования фазового сдвига и амилит -ды выходного напряжения.
Тя1овый линейный синхронный электропривод может быть снабжен включенным между датчиком колебаний мониюсти лииейпого синхронного электроиривода и блоком регулирования фазового сдвига и амилит дьт выходного напряжения силового регулятора фильтром, иастроенпым на частоту колебаний при движении маршрутной единицы, причем датчик колеба.ний моииюсти линейного синхроНИого электропривода может быть выполнен в виде трансформатора тока в обмотке бегущего магнитного ноля.
Датчик колебаний мощности линейного
синхронного электронривода может оыть также выполнен в виде датчика, измеряющего ноложение нолюсов возбудителя относительно наведенного обмоткой бегущего магнитного поля, нли в виде установлен-ного на возбудителе датчика линейного ускорения маршрутной единицы иодвнжного состава.
Тяговый линейный синхронный электропривод может быть снабжен также включенным в рассечку соединения источника переменного тока с обмоткой бегущего магнитного поля переключателем на два коммутационных ноложения, Б первом из которых концы обмотки бегущего магнитного поля соединены со стационарным источником переменного
тока, а в другом включены на общую точку.
На фиг. 1-3 приведена электрическая
схема предложеииого тятового линейиого
синхронного электропривода с линейно-движущнмся ротором и с демнфированием колебаний (три варианта);
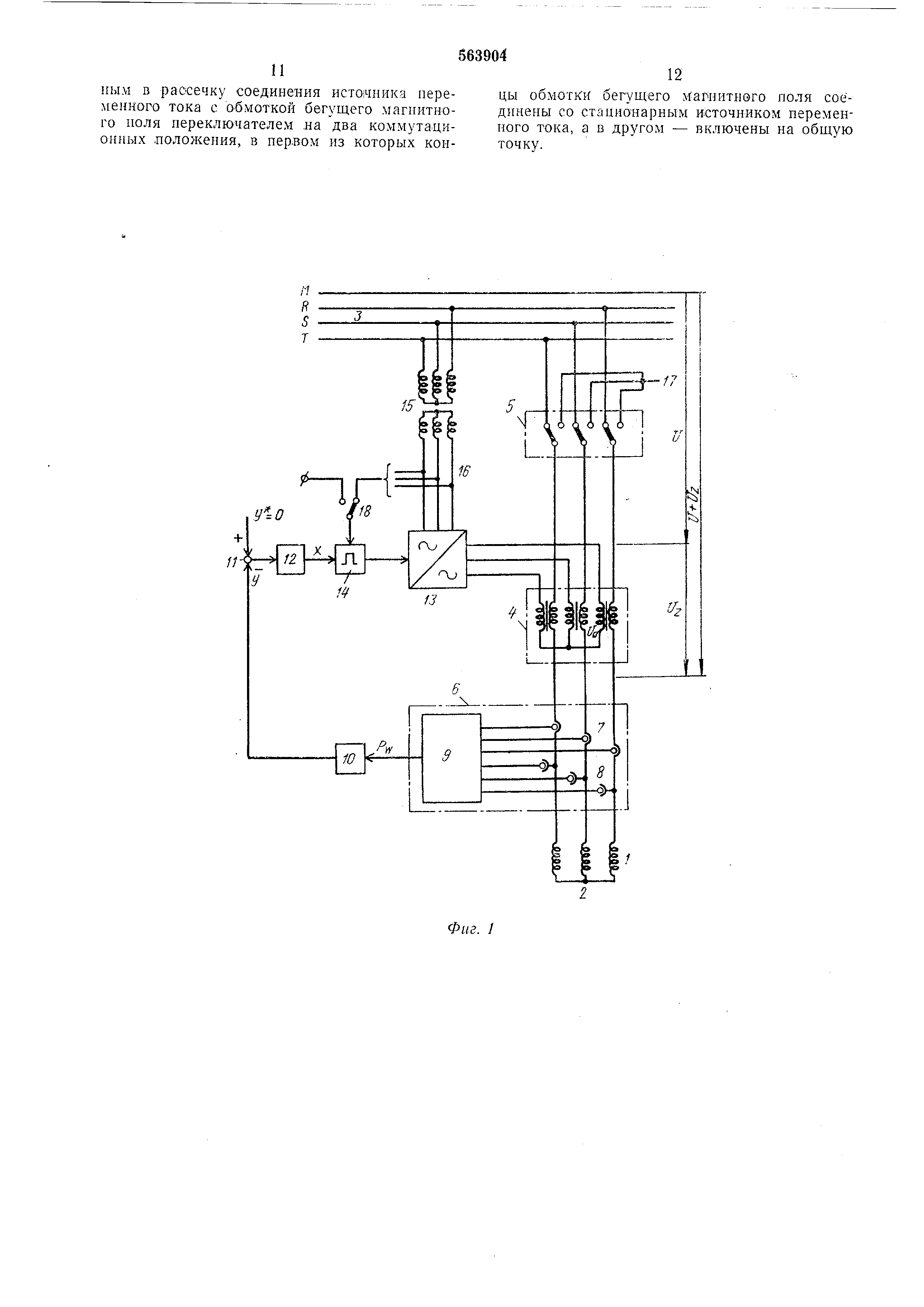
Трехфазная обмотка 1 бегущего магнитного поля еоедипена в звезду со средней точкой 2 (ем. фиг. 1) Обмотка 1 - составная
часть тягового линейного синхронного электроиривода с линейно-движущимся ротором, служащего для передвижения по трассе самодвижущейся маршрутной единицы под,вижного состава электромагнитной подвесной дорогн . Обмотка 1 рассчитана па скорость нередвижения и проложена в качестве статора вдоль трассы; при этом она может продолжатьея на значительное расстояние в иаправлении движения и поэтому используется как
длинный статор. Самодвижущаяся маршрутная единица подвижного состава электромагнитной подвесной дороги может быть, в частности , моториым вагоном высокоскоростной линии.
Электродвигатель е линейно-двнжуи имся ротором охватывает вместе с обмоткой 1 беryniero магиитгюго поля также возбудитель (не показан), который установлен на самодвижун1ейся маршрутной 2 единице в качестве совместно передвигающегося передатчика . Это может быть синхронный электродвигатель е линейно-движуи1имся ротором, который в качестве двигателя оборудован или сверхпроводяп1ей катушкой электромагнита
без ферромагннтного сердечника, или катушкой электромагнита с магнитньгм сердечником со стальным креплением, или постоянным магнитом, возбуждаемым от иостояииых магнитов . Возбудитель может быть выполнен, в
частности, как обмотка возбуждения, постоянная или регулируемая при помощи управляюи1его устройства. Возбудитель при работе самодвиж)щейся единицы подвижного состава удерживается в подвешенном иоложсНИИ при noMOHui подвесного устройства (не ноказано) вместе с марагрутной единицей. Между трассой и нолем единицы подвижного состава образуется, таким обра.зом, зазор, имеющий в ОСНОВ1ЮЛ1 повсюду одинаковую
ширину, В этом зазоре обмотка I бегущего
магнитного ноля производит перемещающееся поле. Обмотка 1 питается от стацио-нарного источника 3 переменного тока, например . трехфазной сети переменного напряжения, по фазовым проводам /, S, Т, и нулевому проводу М; сетевая частота составляет, например , 50 или 60 Гц; переменное напряжение равно 10 кВ. В соединении между стационарным источником 3 переменного папряжения и обмоткой 1 расположена вторичная обмотка трансформатора 4 связи, коэффициент трансформации которого составляет, например, 1. Вторичиая обмотка трансформатора 4 может отключаться от стационарного источника 3 переменного тока посредством выключателя 5.
Обмотка 1 во время движения получает через выключатель 5 и втор.ичную обмотку трансформатора 4 большую часть мощности, необходимую для двилсения маршрутной единицы непосредственно и неуправляемо от стационарного источника 3 переменного тока. Опыт показал, что при такой прямой подаче тока могут возникнуть колебания маршрутиой единицы в направлении движения, вызванные встречными порывами ветра. Эти колебания нарушают движение и являются помехой; кроме того, они могут вызвать выпадение из син .хронизма синхронного электродвигателя с линейнодвий :ущимся ротором, в результате - остановку самодвижущейся маршрутной единицы . Для устранения этих колебаний предусмотрено демнфирование колебаний, которое осуществляется контуром регулирования.
Составной частью контура регулирования является датчик 6 колебаний мощности линейного синхронного электропривода, подающий сигнал Р :, например электрический измеритель актив ной мощности, уста-назленный в соединении между вторичной обмоткой трансформатора 4 тока и обмоткой 1. Он состоит из трансформаторов 7, трансформаторов 8 напряжения и вычислительной схемы 9, которая по измеренному статорному току и входному 1 еремен ному напряжению обмотки 1 определяет активную мопдаость. Сигнал Ящ, является степенью действительного значения активной .мощности и содержи: вместе с составляющей ностоянного напряжения также пропорциональную колебаниям величину иатряження. Таким образом, электрический измеритель активной мощности используется как измерительный прибор для оиределения электромеханических колебаний мощности. При всегда постоянно.м наиряжении переменного тока могут в качестве датчика 6 ирименяться также только трансформаторы 7 тока , которые установлены для измере ия статорного тока в соединении между трансформатором 4 и обмоткой 1 бегущего магнитного поля.
Сигнал Р подводится к фильтру 10, который может быть выполнен в виде активного или пассивного полоснопропускающего фильтра , настроенного на частоту колебаний при
двл(жепии самодвижущейся маршрутной единицы . Частота колебаний обычно ниже частоты напряжепня стап,ио арного источника перемеппого тока, зависит от механической конструкцнн са.модвижущейся маршрутной единицы нодвижного состава и может иметь значе11 е, например, около I Гц. В качестве фильтра 10 может быть применен также фильтр верхних частот.
Фильтр 10 подает вы.чодной сигнал г/, являющийся степенью той части сигнала Р, , которая раскачивается с частотой колебания. Дальнейшая подача составляющей постоянного напрялсения блокнруется фильтром 10. Выходной сигнал // нодводится к блоку регулирования , состоящему из элемента 11 сравнения и регулятора 12. В элементе 11 сравнения выходной сигнал у сравнивается путем вычитания с сигнало.м сравнения г/, обладающим нулевым зиачеиие.м. Регулятор 12 подает в зависимости от выходного сигнала у унравляЕощий сигнал л , который после оп«,еделепия колебани гспользуется для изменения входного переменного напряжения обмотки 1 бегущего магнитного поля.
Для этого иредусмотрен в качестве силового регулятора 13 статический преобразователь частоты, к которому придана система 14 у|правления. Статический преобразователь частоты , например, преобразователь со звеном постоянного тока, .имеет управляемые и неуправляемые полупроводнпковые вентили, рассчитан на часть максимальной мощности синхронного электродвигателя с линейно-двмжущнмся ротором и должен быть при этом установлен только для стабилизирующей MoniHOCTi, составляющей 2-20% максимальной потребляе.мой мощности. Элемент 11 сравнения i регулятор 12 вместе образуют
блок регулирования фазового сдвига и амплитуды выходного напряжения силового регулятора 13.
Силовой регулятор 13 питается через трансформатор 15, коэффициент траисформацин которого ieньшe 1, от стационарного источника 3 переменного тока; его выходная частота равна частоте сети. Выход силового регулятора 13 подключен к первичной обмотке трансформатора 4 связи. Таким образом,
трансформатор 4 связн служит для преобразования выходного переменного напряжения и,, силового регулятора 13 с сетью перемен5 ого напряжения U.
Решающим является то, что положение по
фазе выходного переменного напряженияt/,, силового регулятора 13 устаиавливается относитель}10 сети пере.менного напряжения U носредством управляющего сигнала л , нодаваемого от блока, состоящего .из элемента 11
н регулятора 12, к С1гстеме 14 управлепия. Для фнксаиин положения но фазе выходного переменного напрял еппя U переменное напряжение и сети или ионил ающее трансфор-мированное входное перемеппое папрял ение
силового регулятора 13 отводптся посредстBOM траясформатора::16 напряжения И: подводится к системе, 14 уир.авления. Система 14 управления: ,и вместе с ней силовой регуляг тор. 13,,,т..:е. .преобразователь .частоты,:таким образом одновременно ,,пол,уча}от: от сети, тактовые сигналы. Вследствие-этого изменяется также частота выходного неремеииого: напряжения На с частотой сети. Управляющие им;пульсы , которые система 14 управления передает управляемым вентилям.; преобразователя частоты, : компенсируются;ПО: фазе в зав.ис.иМости ОТ уиравляющего сишн ал ад; относительно прохождения через-нуль переменного напряженияL сети.. Вследствие этого изменяется также, положение по фазе выходного нацряже.ния ,и а преобразователя .частоты относнтель но -переменного напряжения, t/: .сети. .Преобразование . или суммирование в ,трансформаторе 4 связи дает общее выходное напряжение :(;(/fj-i/j ), вектор .которого,, состоит ИЗ:
переменного напряжения f/ сети и.тако,го, же но частоте дополнительного переменного напряжения и г , которое: отличается, только ко,эффициентом .,трансф0рм:ации. от:выходного :Переменного напряжения /„ .: Трансформатор 4 связи следует рассматр.ивать таким ,образом, как векторный сумм,ирующий, орган. Ам:ПЛИг туда общего выходного напряжения;:(С/+ U,- } устанавливается посредством :управляющег,о сигнала х. Это: напряжение служит,, в ,качестве входного переменного: напряжения для,обмотки 1 бегущего магнитного ,поля: , : : :
Контур регулирования выполнен таким образом , что поступающее: через: силовой регулятор 13 дополнительное переменное: напря-, жения и гвротиводейотвует колебаниям мощности . - : : : :: : , . Трехфазный выключатель 5 является переключателем .Он соединяет в первом коммутационном положении (см. фиг.I) ст.аодо,нарный источник 3 переменного тока со втор,нчной обмоткой трансформатора 4 связИ; Во втором коммутациОННсьм положении этоСоединение прерывается; при; этом «леммы трансформатора 4 связи соединяются :с общей : то-чкой звезды 17, поэто,му трансформатор 4 связи, ста,ноВ|ИТ1ся, нормальным .трансформатором со схемой соединения ,в :звезду. Обмоткд 1 бегу-; Щ6ГО магнитного поля ,вэтом втором коммутациОНном положении :может: при аварийном режиме получать , питание : от стационар:ного источника 3 перег енного тока через трансфорМатор 4 связи, силовой регулятор :13 и трансформатор 15 уМеньшенной мощности и измененной частоты. Частота выходного переменного напряжения U в этом случае- за-, дается сигналом управления частотой системе-14 управления чер,ез выключатель 18, который :одновремеЕно: реверсируется выключателем , 5. Эта частота может, вчастности, изменяться iBMecTe свыходным переменным напряжением Ua ,.,,::,
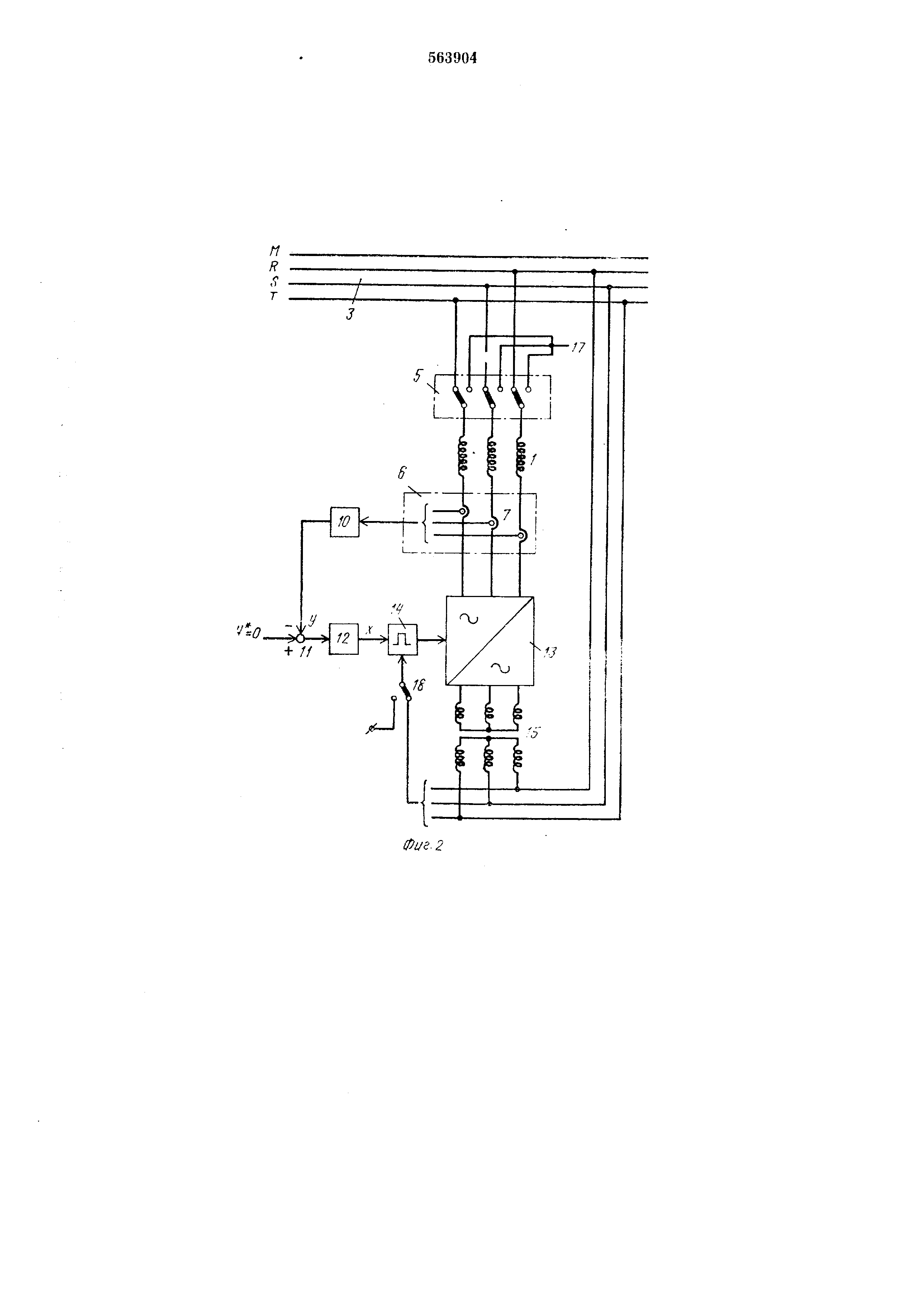
Как показано на-фиг.: 2,-трехфазная ,об-, мотка -1; бегущего ма-гнитного поля подклю чена одним Своим, концом через , выключатель 5 к ,стадионар;ному источнику 3 перемеяНОГО тока:.;,,:;.,,,.,,
В : :nepBOMi, коммута:ционно,М положении выключателя 5 образуется соединение между
5 ста,ционариым. источником 3 :перемел:ног.о,, тока : и обмоткой 1: бегущего:,,магнитпого, ноля. В его: втором ,-коммутационном, ноложеНии ЭТО соединение :р,азмыкается:.,: Одновре.менно расположенные ,на (Сторо.не сети со,едннитель0 ные, клеммы ,обмотки il -бегущего ,магни,тного
поля, ВКЛ-ючаю,тся j-ia общую:точку.,. 17.звезды..:
- Обмотка :1: бегущего- м.агн,итн.ого ноля :Пролс :жена , в частности, .вдоль, :трассы: или, вместе
с возбудителем i может быть расположена-.в.
5 са-модвижущейся маршрутной .единице под-вижного состава. Единица подвижпото ,соста-ва .::дв1НжетСЯ: пр-и: э.том .вдоль реактивного рельса с нерлодически .изменяющейся магнитной , ПрОВОДИМО-СТЬЮ. ,,:,,-,-; ,:1:,:- :: , ;: :,,
0 -:,Другой -кон.ец обмотки- 1. бегущего м.агнитного поля подключен через, датчик. 6, к си,ло-: во.му регулятору :13,. который может :0ытьвыпол .нен также:, ка-к -статический., преобразова-, тель .частоты., Силовой .регулятор- 13 ,рдссчи5 тан ща ч-асть :м:аксимал,ыной,:лшщности .лиией-. ного: синхронного::электродвигателя;, он отдат. етчвыходное Нервменн-оемнапряжбние. с .частотой -Сети. Такоесо:адинеане обмотки .бегЬущего м-агнитного. сетью: с, одной: стороны и
0 с БЫ-ходом.:Силовоге :регулято,ра :13:,.с...Другой, стороны: приводит ;КТому;. ЧТО:.переменное :на,-; пряжение сетиi сумм ируется.с .этим выходн.мм гюременным напряжением :непрсредственн.о ..у, обмотки 1 бегущего магнитного, поля.., .,
5 вой регулятор: 13::мо:жет ,быть также подключен через ;:-трансфор,матор -.15:В- еоединенщ. звезда. -г. звезда,, коэффициент. - трансфермд-, ци« которого.мепьще..1;::к стациЬнарно:му :fjc-, точнику: 3 переменного-тока,1 - : : - ,:.:.:
0 :.Положение::ПО1ф:азе, а.также и. величина выход-ногЬ напряжения - и.еполнительного:юрга-: нд , устанавливаются .отно1сительно-- фазы. перем ,енного: н.а(пряжеяия::сетипосредством: равляющего :сигна:ла л, .абразовапного в-кон-:
5 туре .регулирования.: Этот .контур : регулирот ваиия . :соответс11в.ует в ОСнов,.контуру; ре-: гулнрования, : показанному; ,на ,ф«г. :1. Дат-. чик 6:состо:ит:здесь только из трансформатор JOB,7 .тока, которые- установлены в: соедине-.
0 НИИ между силовым регулятором 13 и о.бмот
кой 1.бегущего магнитного.поля1 - .-...
. , .Пр,И::В0:зникяавенли:колебаний силовой ре-:
гул:ят,ор: 13- подает в соответСтвии :с. ритмом и
размерами этих .колебан-ий электроэнергию.
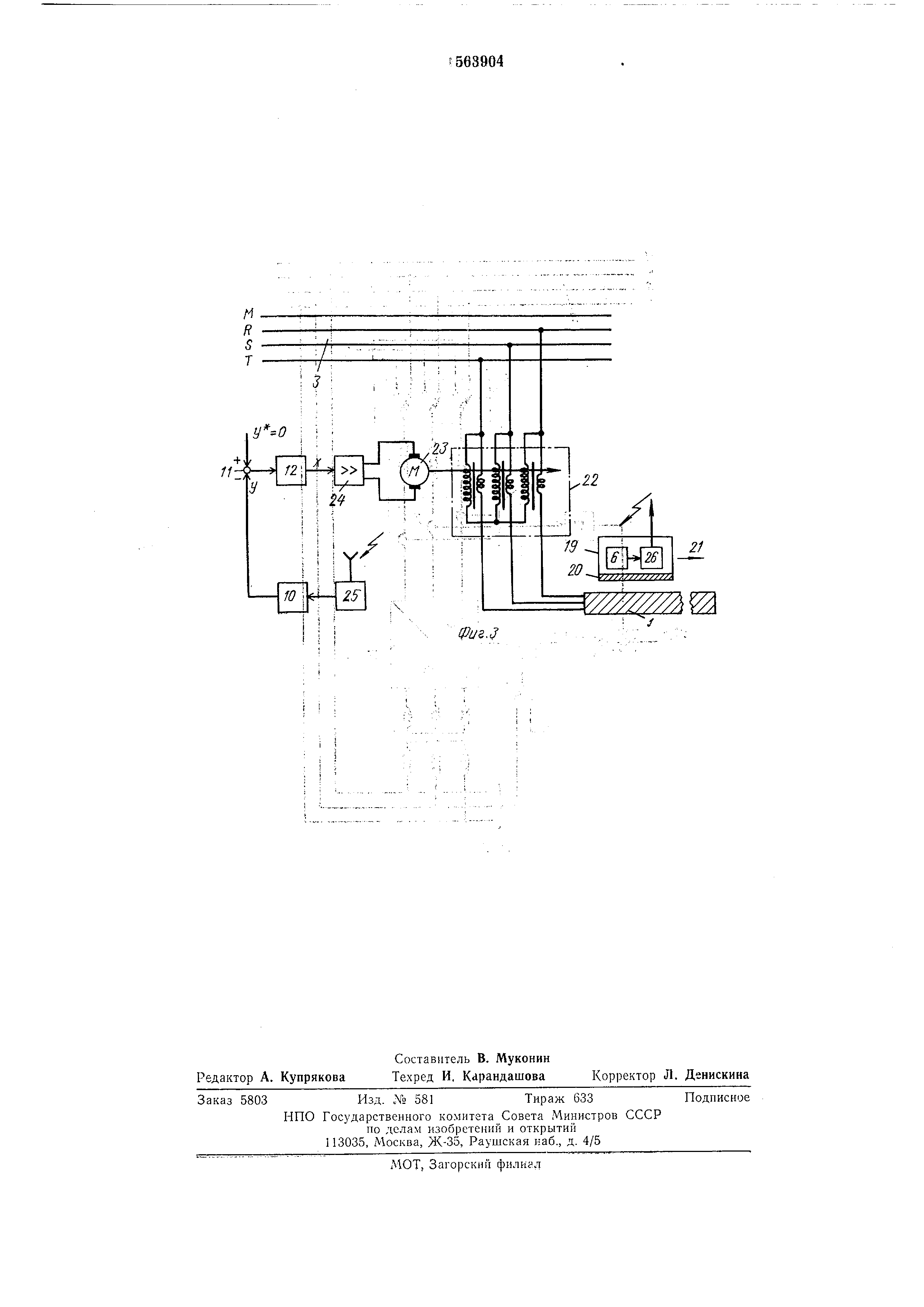
5 в обМОтку. 1 :б.егущего магнитного, поля, кото -; рая компенсирует энергию .колеба-ний самодвижущейся ,маршрутной единицы,;-,, : Па .фиг. 3 схем:атическ«- изображен тяговый линейный, синхронный:-.электродвигатель
0 с линейно:-дв,ижущимся ротором, обхЬатыва-ющим обмотку 1 бегущего магнитного поля,, и раопол.оженную на маршрутной .единице 19 подвижного -состава - электромагнитной-.подвесной доро-ги обмотку 20--возбуждения. Синх5 ровный . электродвигатель с линейнр-двйжущим-ся ротором перемещаег маршрутную еди1Тйцу:19 в направлениистрелки 21. Обмотка- Гчерез вторичную- обмотку поворотного трансформатора 22 и выключатель 5 (на фиг. 3 условно не ноказан) нитается ненОСредственно от стационарного источника 3 переменного тока. Поворотный трансформатор 22 является силювым регулятором, а также сумм,ирующим элементом. При этом он .вылолняет двойную функцию. Включенная в звезду первичная обмотка поворотного трансформатора 22 непосредственно подключена к стационарному источнику 3 неремеяиого то1ка. Коэффициент т,ран1офор|мации значительно меньше 1 и находится, например между 0,02 и 0,2. У поворотного трансформатора 22 для установки положения по фазе его выходного переменного напряжения имеется сервопривод 23, питаемый от усилителя 24. Этот усилитель 24 регулируется управляюшим сигналом к. Управляющий сигнал х, направляется блоком регулирования, состоящим из: регулятора 12 с предварительно: включенным элементом 11 сравнения. Элемент 11 сра внения .сравнивает установленный -«а нуле i сигнал; уставки у с выходным .. сигналоМ фильтра 10. Фильтр 10 нагружается сигналом от приемника 25, т. е. сигналрм, содержащим вели-чину , пропорциональную колебаниям мощности тягового линейного синхронного электропривода .: Соответствующий передатчик 26 закреплен на самодвижуф.ейся маршрутной ;единице 19 .и соединен с д-Ьт;11Пком 6, ;котЬрый также установлен на единице 19 п(}Дви КногЬ состава и из.меряет ее линейное ускорение,; которое является м-ерой для силы тЯ}Гй. Колебания единицы 19 подвижного состава в направлении движения вперед воспринимаются -посвоей величине и частоте колебания линейного ускорения и переда:ются ПО-,радио к неподвижно расположенному на-питающей станции .приемнику 25. С включейием: беспроволочного канала связи образуется закрытый контур регулирования, действие которого описано выше. Формула изобретения 1. Тяговый линейный синхронный электро-, привод для маршрутной единицы подвижного состава, на статоре которого размен1.ена обмотка бегущего магнитного поля, подключаемая одними своимл конца.ми к стационарному источнику переменного тока, и возбудитель которого размещен на маршрутной единице подвижного состава совместно с электромагнитом ее подвешивания, отличающийся тем, что, с целью демпфирования электромеханических колебаний при движении маршрутной единицы, он снабжен включенным между стационарным источником переменного тока и обмоткой бегущего магнитного поля силовым регулятором, мощность оторого меньще максимальной мощности лиейного синхронного электропривода, блоком егул ирования фазового сдвига и амплитуды ь1ходного напряжения силового регулятора датчиком колебаний мощности линейного инхронного электропривода, а к выходу датика колебаний мощности линейного синхроного электропривода подключен вход блока егулирования фазового сдвига и амплитуды ыходного напряжения силового регулятора. 2. Электропривод по п. 1, отл.ичающийся тем, что силовой регулятор выполнен в виде управляемого статического преобразователя частоты. 3. Электропривод по п. 2, отличающийся тем, что он 10на:бже1Н -БраНсфорМатором , включенным между стационарным источником переменного тока и входом управляемого статического преобразователя частоты. 4. Электропривод по п.п. 1-3, отличающ и и с я тем, что силовой регулятор снабжен другим трансфор.матором, первичная обмотка которого подключена к выходу управляемого статического преобразователя частоты, а вторичная - включена между стационарным истбчником переменного тока и обмоткой бегущего магнитного поля: 5.:Электран1ривод по яп. 1-3, отличающийся тем, что выход силового регулятора подключен к другому концу обмотки бегущего магнитного поля. . 6.Электропривод по; п. 1, отличающийся тем, что силовой регулятор выполнен в виде поворотного трансформатора, к сервоприводу которого ,ключен выход блока регулирования фазовогр сдвига и амплитуды выходного напряжения;. 7.Электропривод по п.ц. 1-6, отличающи .йся тем, что он снабжен включенным между датчиком колебаний мощности линейного синхронного электропривода и блоком регулирования фазового сдвига и амплитуды выходного напряжения силового регулятора фильтром, .настроенным на частоту колебаний пр.и движении маршрутной единицы. 8.Электропривод по тп. 1-7, отличаюш и и с я тем, что датчик колебаний мопщости линейного синхронного электропривода выполнен в виде трансформатора тока в обмотке бегущего магнитного поля. 9.Электропривод по пп. 1-7, отличающийся тем, что датчик колебаний мощности линейного синхронного электропр-ивода вьшолнен в виде датчика, измеряющего положение полюсов возбудителя относительно наведенного обмоткой бегущего магнитного поля. 10.Электропривод по дп. 1-7, отличающийся тем, что датчик колебаний мощности линейного синхронного электропривода выполнен в виде установленного на возбудителе датчика линейного ускорения маршрутной единицы подвижного состава. И. Электропривод по п.п. , о т л ичающийся тем, что он снабжен включениым в рассечку соединения истО|Чника переменного тока с обмоткой бегущего магнитного поля нереключателем .на два коммутационных .полол ения, в пер.вом из которых коицы обмоткй бегущего {агиитного поля соединепы со станиопарным источником переменпого тока, а в другом - включены на общую точку.

Реферат
Формула
Комментарии