Устройство управления транспортным средством с электроприводом (варианты) - RU2192974C2
Код документа: RU2192974C2
Чертежи



Описание
Предпосылки создания изобретения
Изобретение относится к
устройству управления транспортными средствами с электроприводом, такими как железнодорожные вагоны с электроприводом, электровозы и т. д. , в частности к устройству управления транспортными
средствами с электроприводом, которое позволяет сохранить комфортные условия езды за счет уменьшения тормозного усилия с заданной скоростью изменения и которое на основании измерений скорости вращения
и скорости торможения установленного на транспортном средстве приводного электрического двигателя отключает систему электрического торможения на определенное время, обеспечивая при этом одновременно
полную остановку транспортного средства.
Обычно на транспортных средствах с электроприводом для торможения используют и электрические, и пневматические тормоза, при этом, в частности, при торможении от некоторой заданной скорости движения транспортного средства до его полной остановки используют только пневматические тормоза. Обусловлено это тем, что для измерения скорости вращения приводного двигателя обычно используются относительно недорогие генераторы импульсов, выдающие за один оборот небольшое количество импульсов и не обладающие такой точностью измерения скорости, при которой непосредственно перед остановкой двигателя в диапазоне низких скоростей можно было бы определить момент полной остановки двигателя, и, как следствие этого, не позволяющие осуществлять необходимое регулирование тормозного усилия в диапазоне низких скоростей с помощью электрических тормозов, но позволяющие регулировать тормозное усилие вплоть до остановки транспортного средства с помощью пневматических тормозов. Поэтому на таких транспортных средствах предусмотрено переключение с режима электрического торможения на режим пневматического торможения при одновременном регулировании тормозов, суммарное тормозное усилие которых в процессе такого регулирования поддерживается на постоянном уровне при одновременном поддержании вплоть до полной остановки транспортного средства на постоянном уровне усилия, снижающего скорость движения транспортного средства.
В японской заявке JP-A 7-7806, озаглавленной "Regenerative braking control method for electric vehicles" ("Способ управления электроприводными транспортными средствами с рекуперативным торможением"), описан способ регулирования, при котором приложенное к элементам системы пневматического торможения усилие рекуперативного торможения используется для сглаживания работы системы торможения при ее переключении с режима рекуперативного торможения на режим пневматического торможения путем умножения действующего усилия рекуперативного торможения на коэффициент, учитывающий постоянную времени пневматических тормозов во всем диапазоне сигналов управления, задающих тормозное усилие, в том числе и на этапе торможения, и на режимах с изменяющейся нагрузкой.
Кроме того, в японской заявке JP-A 11-234804, озаглавленной "Electric Vehicle Reverse Phase Electric Brake Control" ("Способ и устройство регулирования электрических тормозов транспортного средства с электроприводом реверсированием фазы"), описан способ определения нулевой скорости при электрическом торможении с реверсированием фазы, основанный на измерении снижающейся в процессе электрического торможения с реверсированием фазы до нуля скорости транспортного средства, и создания тормозного усилия путем перехода по мере снижения скорости с режима торможения при движении в прямом направлении на режим торможения с изменением направления движущей силы.
Способ, предложенный в заявке JP-A 7-7806, позволяет достаточно эффективно избежать появления удара в момент перехода с режима рекуперативного торможения на режим пневматического торможения, при этом, однако, остается нерешенной проблема, связанная с возможностью достаточно легкого изменения из-за изменения внешних условий, например погоды, фактически создаваемого пневматической системой тормозного усилия и его отклонения от величины тормозного усилия, заданного соответствующим сигналом управления, и недостаточным усилием торможения, создаваемым системой торможения после перехода ее с режима рекуперативного торможения на режим пневматического торможения. Помимо этого, следует также учитывать и необходимость в максимально возможном уменьшении частоты включения и использования пневматических тормозов из-за создаваемого ими на низких скоростях скрежета и шума и затрат, которые связаны с необходимостью замены тормозных башмаков (тормозных колодок).
Кроме того, следует отметить, что в заявке JP-A 11-234804 не приведено достаточно четкого описания способа снижения крутящего момента, который, как известно, во время торможения оказывает значительное влияние на создание комфортных условий езды.
Краткое изложение сущности изобретения
Задачей настоящего изобретения является разработка такого устройства управления транспортным средством с электроприводом, останавливаемым
электрическим торможением, который позволял бы одновременно осуществлять надежное торможение и создавать комфортные условия езды за счет определения такого времени отключения системы электрического
торможения, при котором обеспечивается полная остановка электроприводного транспортного средства, и за счет снижения тормозного усилия с определенной скоростью изменения, обеспечивающей остановку
транспортного средства с электроприводом.
Предлагаемое в изобретении устройство управления позволяет уменьшить удар, возникающий при резких изменениях тормозного усилия, за счет снижения непосредственно перед остановкой транспортного средства тормозного усилия с заданной или определенной скоростью изменения и выбора определенного времени отключения электрического тормоза с полной остановкой транспортного средства в зависимости от скорости вращения и скорости торможения установленного на транспортном средстве приводного электродвигателя с учетом изменения тормозного усилия и задержки времени, возникающей при измерении скорости.
Краткое описание чертежей
На прилагаемых к описанию чертежах показано:
на фиг. 1 - принципиальная схема
предлагаемого в изобретении устройства управления транспортным средством с электроприводом, выполненного по первому варианту,
на фиг. 2 - графики, иллюстрирующие характер изменения во времени
и зависимость при торможении между скоростью и сигналами, выдаваемыми различными элементами предлагаемого в изобретении устройства управления транспортным средством с электроприводом,
на фиг.
3 - принципиальная схема предлагаемого в изобретении устройства управления транспортным средством с электроприводом, выполненного по второму варианту,
на фиг. 4 - принципиальная схема
предлагаемого в изобретении устройства управления транспортным средством с электроприводом, выполненного по третьему варианту, и
на фиг. 5 - принципиальная схема предлагаемого в изобретении
устройства управления транспортным средством с электроприводом, выполненного по четвертому варианту.
Предпочтительные варианты выполнения изобретения
Ниже со ссылками на фиг.
1 и 2 рассмотрен первый вариант выполнения предлагаемого устройства управления транспортным средством с электроприводом.
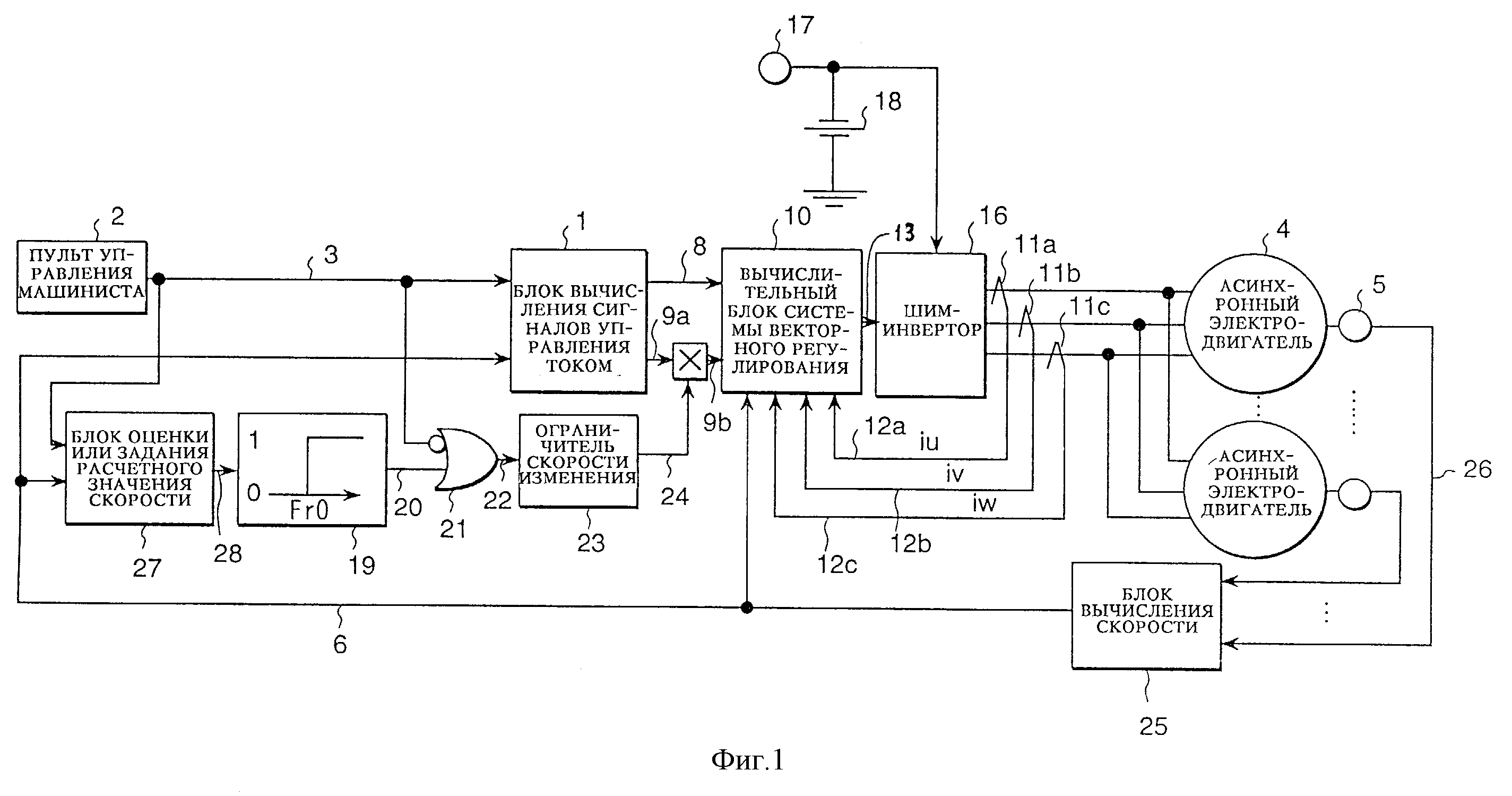
На фиг. 1 показаны асинхронные электродвигатели 4, которые предназначены для привода и рекуперативного торможения транспортного средства с электроприводом по командам, поступающим с пульта 2 управления водителя (машиниста). Устройство управления имеет формирующий сигнал управления током вычислительный блок 1, на вход которого с пульта 2 подаются флаговый сигнал 3 управления тормозом, который в процессе торможения задается равным "1", и опорный сигнал 6 скорости вращения, и который на основании этих сигналов выдает сигнал 8 управления током возбуждения и сигнал 9а управления тяговым током.
Опорный сигнал 6 скорости вращения формируется в соответствии с определенными условиями блоком 25 вычисления скорости по сигналам 26 скорости вращения, поступающим в него от датчиков 5 скорости вращения, которые установлены на асинхронных двигателях 4 (или на колесах, на чертеже не показаны). К такого рода условиям относится, например, определение величины опорного сигнала 6 скорости вращения максимальным значением скорости вращения, полученным в результате сравнения скоростей, измеренных всеми датчиками 5.
Контроллер, предназначенный для управления преобразователем электрической мощности с целью регулирования момента электрического двигателя, выполнен в виде вычислительного блока 10 системы векторного регулирования, на вход которого подаются опорный сигнал 6 скорости вращения, сигнал 8 управления током возбуждения, сигнал 9b изменения тягового тока и сигналы 12а, 12b и 12с измеренного тока двигателя, полученные с помощью датчиков 11а, 11b и 11с тока, выдает на основании этих сигналов сигнал 13 управления напряжением, который определяет выходное напряжение инвертора и благодаря чему осуществляется регулирование момента электрического двигателя.
Сигнал 13 управления напряжением подается на преобразователь электрической мощности, который выполнен в виде инвертора 16 широтно-импульсной модуляции (ШИМ-инвертор), а отпирающие импульсы, вычисленные на основании сигналов 13 управления напряжением, используются для управления работой переключающих устройств главной цепи инвертора, который преобразует напряжение постоянного тока источника 17 постоянного тока, подаваемое на него через фильтрующий конденсатор 18, в напряжение трехфазного переменного тока, которое подается на асинхронные двигатели 4.
Флаговый сигнал 3
управления тормозом и опорный сигнал 6 скорости вращения подаются на вход вычислительного блока, предназначенного для вычисления торможения на основании измеренной датчиком скорости вращения
электрического двигателя, выполненного в виде блока 27 оценки или задания расчетного значения скорости, в котором, когда во время торможения опорный сигнал 6 скорости вращения становится меньше
определенной величины, пропорциональной величине Fr0 (Гц), путем дифференцирования опорного сигнала 6 скорости вращения получают сохраняемую в памяти величину изменения во времени скорости
торможения β (Гц/с) и вычисляют в соответствии с приведенной ниже формулой поступающий на выход сигнал 28 оценки или задания расчетного значения скорости:
Frh = Fr0-βt. (1)
В этом уравнении Frh (Гц) соответствует сигналу 28 оценки или задания расчетного значения скорости, Fr0 (Гц) означает начальную скорость, с
которой начинается процесс вычислений, β (Гц/с) представляет собой сохраняемую в памяти величину скорости торможения при Fr0 (Гц), a t (с) означает время, отсчитываемое с момента,
когда скорость становится меньше Fr0 (Гц), и равное в этот момент нулю.
Сигнал 28 оценки или задания расчетного значения скорости подается на вход компаратора 19, который выдает флаговый сигнал 20 скорости, который становится равным "1", когда сигнал 28 оценки или задания расчетного значения скорости становится больше сигнала, соответствующего скорости Fr0 (Гц). Логический сумматор 21 формирует путем отрицания флагового сигнала 3 управления тормозом и флагового сигнала 20 скорости флаговый сигнал 22 управления работой электрического тормоза. При этом флаговый сигнал 22 управления работой электрического тормоза становится равным "1", когда сигнал 28 оценки или задания расчетного значения скорости во время движения с потреблением мощности, движения по инерции и торможения превышает величину, соответствующую скорости Fr0 (Гц), или равным "0", когда сигнал 28 оценки или задания расчетного значения скорости становится меньше или равным величине, соответствующей скорости Fr0 (Гц).
Сигнал 24 снижения тормозного момента выдается ограничителем 23 скорости изменения усилия торможения, нижнее предельное значение которого соответствует подаче флагового сигнала управления работой электрического тормоза, равного -1/td (1/с), на вход ограничителя. Сигнал 24 снижения тормозного момента умножается на сигнал 9а управления тяговым током и в результате сигнал 9а управления тяговым током в течение периода времени, равного td, когда опорный сигнал 6 скорости вращения становится во время торможения меньше сигнала, соответствующего скорости Fr0 (Гц), снижается по наклонной, формируя в итоге сигнал 9b изменения тягового тока, в результате чего момент электрического двигателя снижается с заданной скоростью.
Такой характер изменения снижающегося по наклонной сигнала 9b, определяющего характер изменения тягового тока, позволяет смягчить удар, возникающий во время отключения электрического тормоза, и обеспечить тем самым комфортные условия езды. При этом величина Fr0 (Гц), которая определяется начальной скоростью, при которой во время торможения тяговый ток начинает падать, и время td (с), которое равно времени снижения тягового тока, задаются таким образом, чтобы при этом была обеспечена надежная остановка транспортного средства с электроприводом в комфортных для езды условиях.
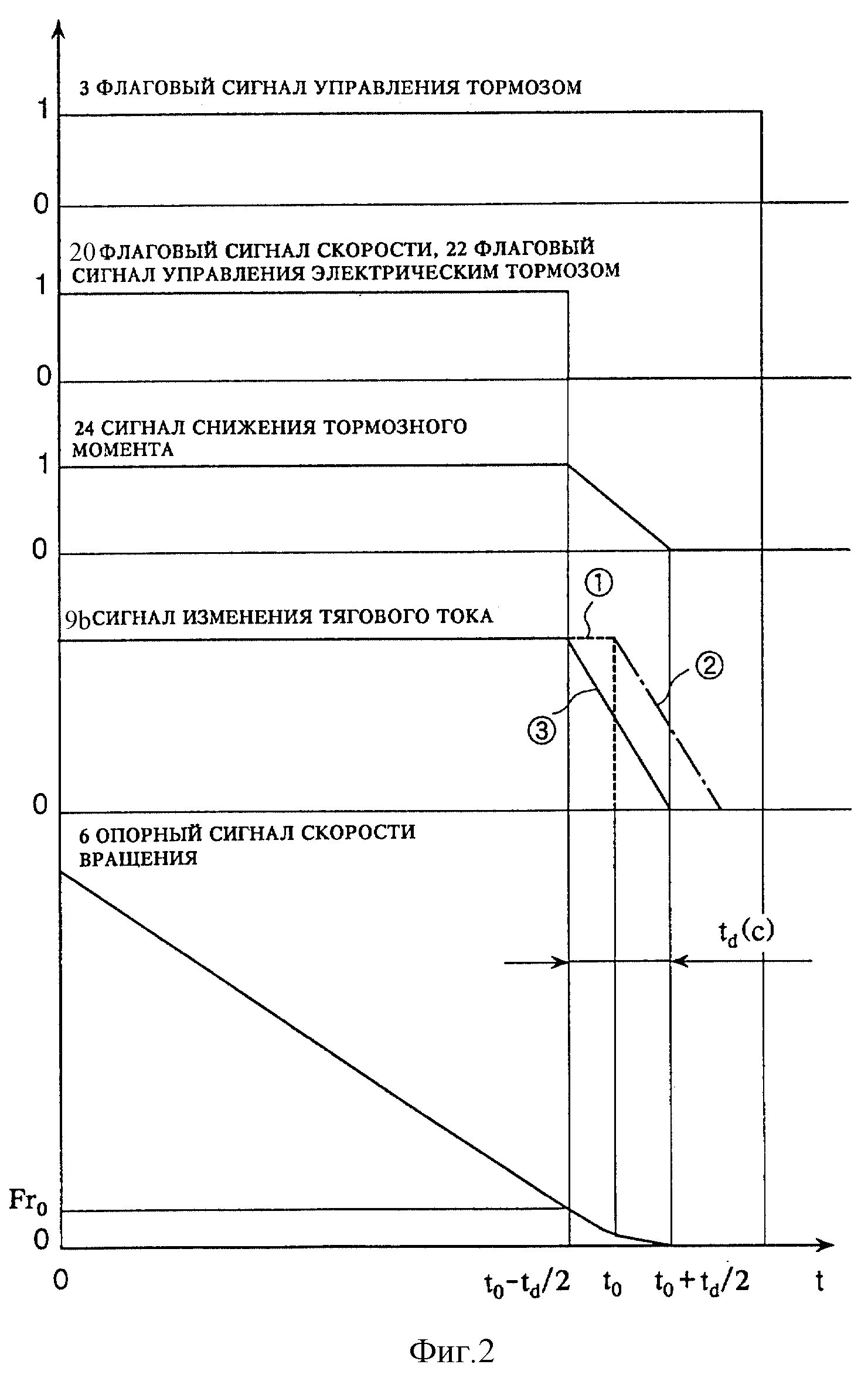
На фиг. 2 показаны графики изменения во времени связанных со скоростью сигналов, выдаваемых во время торможения различными элементами выполненного по первому варианту устройства управления транспортным средством с электроприводом.
В начальный момент времени (t = 0) флаговый сигнал 3 управления тормозом равен "1", что говорит о том, что система работает в режиме торможения. В этот момент флаговый сигнал 20 скорости и флаговый сигнал 22 управления работой тормоза равны "1" и остаются такими же все время, пока опорный сигнал 6 скорости вращения остается достаточно большим. Для равномерного снижения скорости и остановки транспортного средства при скорости, соответствующей моменту времени t0 и показанному пунктирной линией опорному сигналу 6 скорости вращения, можно использовать метод ступенчатого (резкого) снижения сигнала 9b изменения тягового тока, начиная с момента времени to, что обозначено на фиг. 2 позицией (1).
Однако такой способ, предусматривающий резкое изменение сигнала 9b, определяющего характер изменения тягового тока, нежелателен, поскольку при этом из-за ударов, возникающих при резком изменении тормозного усилия, у находящихся в транспортном средстве людей возникает чувство дискомфорта. В этой связи может оказаться целесообразным для смягчения удара, возникающего из-за резкого изменения тормозного усилия, обеспечить в течение промежутка времени td (с), начиная с момента времени t0, снижение тягового тока по наклонной линии, обозначенной на фиг. 2 штрихпунктирной линией (2). Однако, если снижение тягового тока начать в момент времени t0 (с), то после момента времени t0 (с) в течение периода времени td (с) транспортное средство будет оставаться под действием направленной вперед движущей силы, не позволяющей удержать транспортное средство в остановленном состоянии.
Если же снижение по наклонной линии начать до момента времени t0 (с), т. е. раньше того момента, начиная с которого в течение времени td/2 (с), которое равно половине времени изменения сигнала 9b, определяющего характер изменения тягового тока, предполагается остановить транспортное средство, то опорный сигнал 6 скорости вращения станет равным нулю точно в момент времени (t0 + td/2) (с), когда сигнал 9b изменения тягового тока в результате снижения станет равным нулю, что обеспечит возможность полной остановки транспортного средства в нужный момент времени и его дальнейшего удержания в остановленном состоянии.
Из всего вышесказанного следует, что скорость Fr0 (Гц) вращения, при которой флаговый сигнал 20
скорости должен быть снижен и начиная с которой полная остановка транспортного средства происходит путем уменьшения сигнала 9b снижения тягового тока по наклонной линии в течение интервала времени
td (с) и торможения с постоянной скоростью изменения β (Гц/с), можно определить из следующего уравнения:
Fr0 = β×td/2. (2)
Кроме того, скорость Fr0 (Гц) вращения, при которой флаговый сигнал 20 скорости должен быть снижен с учетом времени dt запаздывания определения опорного сигнала 6 скорости вращения, может
быть получена из следующего уравнения:
Fr0 = β×(td/2+dt). (3)
В данном случае в качестве времени dt запаздывания определения опорного сигнала 6
скорости вращения можно принять постоянную времени первого порядка элемента задержки времени, включенного в схему для снижения шума и в других аналогичных целях.
Ниже со ссылкой на фиг. 3 рассмотрен второй вариант выполнения предлагаемого в изобретении устройства управления транспортным средством с электроприводом.
В показанном на фиг. 3 устройстве управления транспортным средством с электроприводом отсутствует показанный на фиг. 1 блок 27 оценки или задания расчетного значения скорости. В устройстве управления по фиг. 3 флаговый сигнал 3 управления тормозом, который при включении машинистом с пульта 2 управления режима торможения принимает значение, равное "1", и опорный сигнал 6 скорости вращения подаются на вход формирующего сигнал управления током вычислительного блока 1, который выдает сигнал 8 управления током возбуждения и сигнал 9а управления тяговым током.
Опорный сигнал 6 скорости вращения формируется блоком 25 вычисления скорости по сигналам 26 скорости вращения, поступающим в него от датчиков 5 скорости вращения, которые установлены на одном или нескольких асинхронных двигателях 4 (или на колесах, которые на чертеже не показаны), в соответствии с определенными условиями, о которых было сказано выше при описании первого варианта.
Вычислительный блок 10 системы векторного регулирования, на вход которого подаются опорный сигнал 6 скорости вращения, сигнал 8 управления током возбуждения, сигнал 9b изменения тягового тока и сигналы 12а, 12b и 12с измеренного тока двигателя, полученные с помощью датчиков 11а, 11b и 11с тока, выдает на основании этих сигналов сигнал 13 управления напряжением, который определяет выходное напряжение инвертора и благодаря чему осуществляют регулирование момента электрического двигателя.
Сигнал 13 управления напряжением подается в ШИМ-инвертор 16, а отпирающие импульсы, вычисленные на основании сигналов 13 управления напряжением, используются для управления работой переключающих устройств главной цепи инвертора, который преобразует напряжение постоянного тока источника 17 постоянного тока, подаваемое на него через фильтрующий конденсатор 18, в напряжение трехфазного переменного тока, которое подается на асинхронные двигатели 4.
Опорный сигнал 6 скорости вращения подается на вход в компаратор 19, который выдает флаговый сигнал 20 скорости, когда опорный сигнал 6 скорости вращения становится больше Fr0 (Гц).
Логический сумматор 21 формирует путем отрицания флагового сигнала 3 управления тормозом и флагового сигнала 20 скорости флаговый сигнал 22 управления работой электрического тормоза. При этом флаговый сигнал 22 управления работой электрического тормоза становится равным "1", когда опорный сигнал 6 скорости вращения во время движения с потреблением мощности, движения по инерции и торможения превышает величину, соответствующую скорости Fr0 (Гц), или равным "0", когда сигнал 28 оценки или задания расчетного значения скорости становится меньше или равным величине, соответствующей скорости Fr0 (Гц).
Сигнал 24 снижения тормозного момента выдается ограничителем 23 скорости изменения усилия торможения, нижнее предельное значение которого соответствует подаче флагового сигнала управления работой электрического тормоза, равного -1/td (1/с), на вход ограничителя. Сигнал 24 снижения тормозного момента умножается на сигнал 9а управления тяговым током и в результате сигнал управления тяговым током снижается по наклонной в течение периода времени, равного td, когда опорный сигнал 6 скорости вращения становится во время торможения меньше сигнала, соответствующего скорости Fr0 (Гц). Такой характер изменения снижающегося по наклонной сигнала 9b, определяющего характер изменения тягового тока, позволяет смягчить удар, возникающий во время отключения электрического тормоза, и обеспечить тем самым комфортные условия езды. При этом величина Fr0 (Гц), которая определяется начальной скоростью, при которой во время торможения тяговый ток начинает падать, и время td (с), которое равно времени снижения тягового тока, задаются таким образом, чтобы при этом была обеспечена надежная остановка электроприводного транспортного средства в комфортных для езды условиях.
Ниже со ссылкой на показанную на фиг. 4 принципиальную схему рассмотрен третий вариант выполнения предлагаемого устройства управления транспортным средством с электроприводом.
В устройстве управления по фиг. 4 флаговый сигнал 3 управления тормозом, который при включении машинистом с пульта 2 управления режима торможения принимает значение, равное "1", и опорный сигнал 6 скорости вращения подаются на вход формирующего сигнал управления током вычислительного блока 1, который выдает сигнал 8 управления током возбуждения и сигнал 9а управления тяговым током.
Опорный сигнал 6 скорости вращения формируется блоком 25 вычисления скорости по сигналу 26 скорости вращения, поступающим в него от датчиков 5 скорости вращения, которые установлены на одном или нескольких асинхронных двигателях 4 (или на колесах, которые на чертеже не показаны) в соответствии с определенными условиями, о которых было сказано выше при описании первого варианта.
Вычислительный блок 10 системы векторного регулирования, на вход которого подаются опорный сигнал 6 скорости вращения, сигнал 8 управления током возбуждения, сигнал 9b изменения тягового тока и сигналы 12а, 12b и 12с измеренного тока двигателя, полученные с помощью датчиков 11а, 11b и 11с тока, выдает на основании этих сигналов сигнал 13 управления напряжением, который определяет выходное напряжение ШИМ-инвертора 16. Сигнал 13 управления напряжением подается в ШИМ-инвертор 16, а отпирающие импульсы, вычисленные на основании сигналов 13 управления напряжением, используются для управления работой переключающих устройств главной цепи инвертора, который преобразует напряжение постоянного тока источника 17 постоянного тока, подаваемое на него через фильтрующий конденсатор 18, в напряжение трехфазного переменного тока, которое подается на асинхронные двигатели 4.
Флаговый сигнал 3 управления тормозом и опорный сигнал 6 скорости вращения подаются на вход блока
27 оценки или задания расчетного значения скорости, в котором, когда во время торможения опорный сигнал 6 скорости вращения становится меньше определенной величины, пропорциональной величине Fr0 (Гц), путем дифференцирования опорного сигнала 6 скорости вращения получают сохраняемую в памяти величину изменения во времени скорости торможения β (Гц/с) и вычисляют в соответствии с
приведенной ниже формулой поступающий на выход сигнал 28 оценки или задания расчетного значения скорости:
Frh = Fr0-βt. (4)
В этой формуле Frh (Гц) соответствует сигналу 28 оценки или задания расчетного значения скорости, Fr0 (Гц) означает начальную скорость, с которой начинается процесс вычислений, β (Гц/с)
представляет собой сохраняемую в памяти величину скорости торможения при Fr0 (Гц), a t (с) означает время, отсчитываемое с момента, когда скорость становится меньше Fr0 (Гц), и
равное в этот момент нулю.
Опорный сигнал 6 скорости вращения подается на вход компаратора 19а, который выдает флаговый сигнал 20а скорости, который становится равным "1", когда опорный сигнал 6 скорости вращения становится больше Fr0 (Гц). Сигнал 28 оценки или задания расчетного значения скорости подается на вход компаратора 19b, который выдает флаговый сигнал 20b скорости, который становится равным "1", когда сигнал 28 оценки или задания расчетного значения скорости становится больше сигнала, соответствующего скорости Fr0 (Гц).
Логический сумматор 29 формирует флаговый сигнал 20с скорости, логически суммируя флаговые сигналы 20а и 20b. При этом флаговый сигнал 20с становится равным "1", когда один или оба этих сигнала 20а и 20b равны "1".
Логический сумматор 21 формирует путем отрицания флагового сигнала 3 управления тормозом и флагового сигнала 20с скорости флаговый сигнал 22 управления работой электрического тормоза. При этом флаговый сигнал 22 управления работой электрического тормоза становится равным "1", когда сигнал 28 оценки или задания расчетного значения скорости во время движения с потреблением мощности, движения по инерции и торможения превышает величину, соответствующую скорости Fr0 (Гц), и становится равным "0", когда опорный сигнал 6 скорости вращения или сигнал 28 оценки или задания расчетного значения скорости становится меньше или равным величине, соответствующей скорости Fr0 (Гц).
Сигнал 24 снижения тормозного момента выдается ограничителем 23 скорости изменения усилия торможения, нижнее предельное значение которого соответствует подаче флагового сигнала управления работой электрического тормоза, равного -1/td (1/с), на вход ограничителя. Сигнал 24 снижения тормозного момента умножается на сигнал 9а управления тяговым током и в результате сигнал управления тяговым током снижается по наклонной в течение периода времени, равного td (с), когда опорный сигнал 6 скорости вращения или сигнал 28 оценки или расчетного значения скорости становится во время торможения меньше сигнала, соответствующего скорости Fr0 (Гц).
Такой характер изменения снижающегося по наклонной сигнала 9b, определяющего характер изменения тягового тока, позволяет смягчить удар, возникающий во время отключения электрического тормоза, и обеспечить тем самым комфортные условия езды. При этом величина Fr0 (Гц), которая определяется начальной скоростью, при которой во время торможения тяговый ток начинает падать, и время td (с), которое равно времени снижения тягового тока, задаются таким образом, чтобы при этом была обеспечена надежная остановка транспортного средства с электроприводом в комфортных для езды условиях.
Далее со ссылкой на показанную на фиг. 5 принципиальную схему рассмотрен еще один - четвертый вариант выполнения предлагаемого в изобретении устройства управления транспортным средством с электроприводом. В устройстве управления по фиг. 5 флаговый сигнал 3 управления тормозом, который при включении машинистом с пульта 2 управления режима торможения принимает значение, равное "1", и опорный сигнал 6 скорости вращения подаются на вход формирующего сигнал управления током вычислительного блока 1, который выдает сигнал 8 управления током возбуждения и сигнал 9а управления тяговым током. При этом опорный сигнал 6 скорости вращения формируется блоком 25 вычисления скорости по сигналу 26 скорости вращения, поступающему в него от датчиков 5 скорости вращения, которые установлены на асинхронных двигателях 4 (или на колесах, которые на чертеже не показаны) в соответствии с определенными условиями, о которых было сказано выше при описании первого варианта.
Вычислительный блок 10 системы векторного регулирования, на вход которого подаются опорный сигнал 6 скорости вращения, сигнал 8 управления током возбуждения, сигнал 9b изменения тягового тока и сигналы 12а, 12b и 12с измеренного тока двигателя, полученные с помощью датчиков 11a, 11b и 11с тока, выдает на основании этих сигналов сигнал 13 управления напряжением, который определяет выходное напряжение ШИМ-инвертора 16. Сигнал 13 управления напряжением подается в ШИМ-инвертор 16, а отпирающие импульсы, вычисленные на основании сигналов 13 управления напряжением, используются для управления работой переключающих устройств главной цепи инвертора, который преобразует напряжение постоянного тока источника 17 постоянного тока, подаваемое на него через фильтрующий конденсатор 18, в напряжение трехфазного переменного тока, которое подается на асинхронные двигатели 4.
Флаговый сигнал 3
управления тормозом и опорный сигнал 6 скорости вращения подаются на вход блока 27 оценки или задания расчетного значения скорости, в котором, когда во время торможения опорный сигнал 6 скорости
вращения становится меньше определенной величины, пропорциональной величине Fr0 (Гц), путем дифференцирования опорного сигнала 6 скорости вращения получают сохраняемую в памяти величину
изменения во времени скорости торможения β (Гц/с) и вычисляют в соответствии с приведенной ниже формулой сигнал 28 оценки или задания расчетного значения скорости:
Frh =
Fr0-βt. (5)
В этой формуле Frh (Гц) соответствует сигналу 28 оценки или задания расчетного значения скорости, Fr0 (Гц) означает начальную скорость, с
которой начинается процесс вычислений, β (Гц/с) представляет собой сохраняемую в памяти величину скорости торможения при Fr0 (Гц), a t (с) означает время, отсчитываемое с момента,
когда скорость становится меньше Fr0 (Гц), и равное в этот момент нулю.
Опорный сигнал 6 скорости вращения и сигнал 28 оценки или задания расчетного значения скорости подаются на вход селектора 30, который выбирает меньший из двух сигналов скорости и выдает минимальный сигнал 31 скорости вращения. Минимальный сигнал 31 скорости вращения подается на вход компаратора 19, который выдает флаговый сигнал 20, который становится равным "1", когда минимальный сигнал 31 скорости вращения превышает сигнал, соответствующий скорости Fr0 (Гц).
Логический сумматор 21 формирует путем отрицания флагового сигнала 3 управления тормозом и флагового сигнала 20 скорости флаговый сигнал 22 управления работой электрического тормоза. При этом флаговый сигнал 22 управления работой электрического тормоза становится равным "1", когда опорный сигнал 6 скорости вращения и сигнал 28 оценки или задания расчетного значения скорости во время движения с потреблением мощности, движения по инерции и торможения оба превышают величину, соответствующую скорости Fr0 (Гц), и равным "0", когда опорный сигнал 6 скорости вращения или сигнал 28 оценки или задания расчетного значения скорости становится равным или меньшим величины сигнала, соответствующего скорости Fr0 (Гц).
Сигнал 24 снижения тормозного момента выдается ограничителем 23 скорости изменения усилия торможения, нижнее предельное значение которого соответствует подаче флагового сигнала управления работой электрического тормоза, равного -1/td (1/с), на вход ограничителя. Сигнал 24 снижения тормозного момента умножается на сигнал 9а управления тяговым током и в результате сигнал управления тяговым током снижается по наклонной в течение периода времени, равного td (с), когда опорный сигнал 6 скорости вращения или сигнал 28 оценки или расчетного значения скорости становится во время торможения меньше сигнала, соответствующего скорости Fr0 (Гц).
Такой характер изменения снижающегося по наклонной сигнала 9b, определяющего характер изменения тягового тока, позволяет смягчить удар, возникающий во время отключения электрического тормоза, и обеспечить тем самым комфортные условия езды. При этом величина Fr0 (Гц), которая определяется начальной скоростью, при которой во время торможения тяговый ток начинает падать, и время td (с), которое равно времени снижения тягового тока, задаются таким образом, чтобы при этом была обеспечена надежная остановка транспортного средства с электроприводом в комфортных для езды условиях.
Предлагаемое в настоящем изобретении устройство управления обеспечивает комфортные условия езды путем уменьшения по определенному закону изменения тормозного усилия на близких к остановке транспортного средства скоростях и позволяет осуществить полную остановку транспортного средства за счет определения времени отключения электрического тормоза по скорости вращения приводного двигателя и торможения с учетом скорости уменьшения тормозного усилия на близких к остановке скоростях и задержки времени при измерении скорости.
Реферат
Изобретение относится к устройствам управления транспортными средствами с электроприводом. Технический результат изобретения заключается в обеспечении плавности торможения транспортного средства. В устройстве управления для определения времени отключения электрического тормоза при полной остановке транспортного средства с помощью системы регулирования электрическим торможением, а также для надежной остановки и одновременно для сохранения комфортных условий езды за счет снижения тормозного усилия с заданной скоростью изменения регулирование момента электрического двигателя осуществляется путем регулирования преобразователя мощности с использованием управляющего его работой ведущего регулятора, при этом на основании измеренной измерительным устройством скорости электрического двигателя вычисляется торможение, а дальнейшая скорость электрического двигателя определяется расчетным путем на основании измеренной скорости вращения и скорости торможения в то время, когда измеренная скорость вращения электрического двигателя становится меньше заданной скорости, и регулирование момента осуществляется на основании полученного расчетом значения скорости с использованием ведущего регулятора преобразователя мощности. 3 с. и 3 з.п. ф-лы, 5 ил.
Комментарии