Устройство управления и способ управления транспортным средством - RU2738653C1
Код документа: RU2738653C1
Чертежи
Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления для транспортного средства, выполненному с возможностью управлять движущей/тормозной силой и фрикционной тормозной силой мотора, чтобы останавливать транспортное средство, и относится к такому способу управления.
Уровень техники
[0002] Традиционно, известны технологии для системы управления ускорением/замедлением транспортного средства, которые управляют замедлением в соответствии со смещением акселератора, когда смещение акселератора меньше предварительно определенного значения, и управляют ускорением в соответствии со смещением акселератора, когда смещение акселератора составляет предварительно определенное значение или больше (см. JP2000-205015A). Такая система управления ускорением/замедлением задает целевое ускорение/замедление в соответствии со смещением акселератора. Смещение акселератора, соответствующее целевому ускорению/замедлению, задается равным 0, в силу этого обеспечивает возможность транспортному средству поддерживать постоянную скорость транспортного средства без необходимости от водителя регулировать смещение акселератора даже на дороге с уклоном.
Сущность изобретения
[0003] Чтобы приводить в движение/тормозить транспортное средство, вышеуказанное устройство управления оценивает градиент поверхности дороги с использованием модели транспортного средства на основе таких параметров, как скорость транспортного средства, движущий крутящий момент и вес, и затем прикладывает тормозной крутящий момент на основе оцененного значения градиента поверхности дороги таким образом, чтобы останавливать транспортное средство.
[0004] Оцененное значение градиента поверхности дороги может отличаться между фактическим состоянием транспортного средства и моделью транспортного средства, поскольку вес транспортного средства меняется, например, в зависимости от числа пассажиров и количества багажа на транспортном средстве. В таком случае, оцененное значение градиента поверхности дороги может иметь ошибку. Если значение тормозного крутящего момента, полученное из оцененного значения градиента поверхности дороги, ниже тормозного крутящего момента, требуемого для того, чтобы останавливать транспортное средство, транспортное средство может не иметь возможность останавливаться.
[0005] С учетом таких проблем, настоящее изобретение нацелено на то, чтобы останавливать транспортное средство, несмотря на различные градиенты поверхности дороги, по которой движется транспортное средство.
[0006] Согласно одному аспекту настоящего изобретения, способ управления транспортным средством включает в себя этап вычисления цели для вычисления целевого крутящего момента мотора в соответствии со смещением педали акселератора, причем транспортное средство включает в себя мотор, выполненный с возможностью предоставлять движущую/тормозную силу в транспортное средство, и фрикционный тормозной механизм, выполненный с возможностью предоставлять фрикционную тормозную силу в транспортное средство. Дополнительно, способ управления транспортным средством включает в себя этап оценки градиента для оценки градиентного крутящего момента, чтобы подавлять возмущения вследствие градиента поверхности дороги, по которой движется транспортное средство, этап вычисления команд управления для вычисления значения команды управления крутящим моментом мотора на основе градиентного крутящего момента и целевого крутящего момента, и этап управления для управления крутящим моментом мотора в соответствии со значением команды управления крутящим моментом. Способ управления транспортным средством также включает в себя этап управления остановкой для предоставления тормозного крутящего момента в транспортное средство для того, чтобы останавливать транспортное средство, причем тормозной крутящий момент составляет большое значение, превышающее градиентный крутящий момент, и изменения тормозного крутящего момента с крутящего момента мотора на фрикционный момент посредством фрикционного тормозного механизма.
Краткое описание чертежей
[0007] Фиг. 1 показывает конфигурацию устройства управления, чтобы управлять транспортным средством согласно первому варианту осуществления настоящего изобретения.
Фиг. 2 является блок-схемой последовательности операций, показывающей пример способа для управления транспортным средством в настоящем варианте осуществления.
Фиг. 3 является блок-схемой, показывающей один пример функциональной конфигурации контроллера мотора, который составляет устройство управления настоящего варианта осуществления.
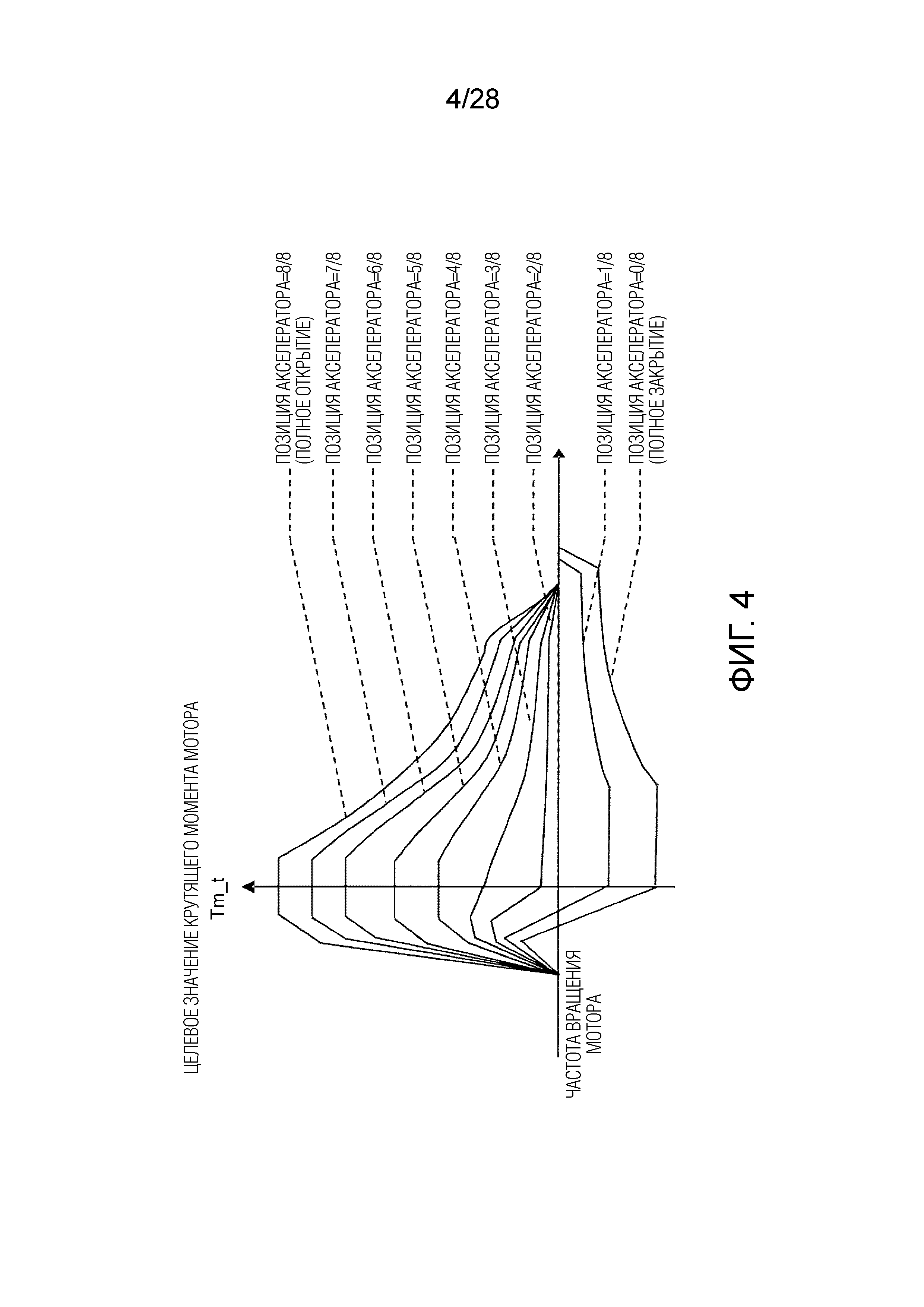
Фиг. 4 является картой, показывающей взаимосвязь между значениями целевого крутящего момента и частотами вращения мотора для каждой позиции акселератора.
Фиг. 5 описывает передаточную характеристику из крутящего момента мотора в частоту вращения мотора.
Фиг. 6 является блок-схемой, показывающей один пример конфигурации модуля вычисления градиентного крутящего момента, чтобы вычислять градиентный крутящий момент, чтобы подавлять силу, действующую на транспортное средство вследствие градиента поверхности дороги.
Фиг. 7 является блок-схемой, показывающей один пример конфигурации модуля управления демпфированием вибрации, чтобы подавлять вибрации транспортного средства.
Фиг. 8 является блок-схемой, показывающей один пример конфигурации модуля вычисления целевого останавливающего крутящего момента, чтобы вычислять целевое значение для тормозного крутящего момента, предоставленного в транспортное средство.
Фиг. 9 является блок-схемой, показывающей один пример функциональной конфигурации тормозного контроллера, который составляет устройство управления настоящего варианта осуществления.
Фиг. 10 является временной диаграммой, показывающей пример способа для остановки транспортного средства в настоящем варианте осуществления.
Фиг. 11 описывает другой пример вычисления степени повышения давления фрикционного тормоза.
Фиг. 12 является блок-схемой последовательности операций способа, показывающей пример обработки управления остановкой в настоящем варианте осуществления.
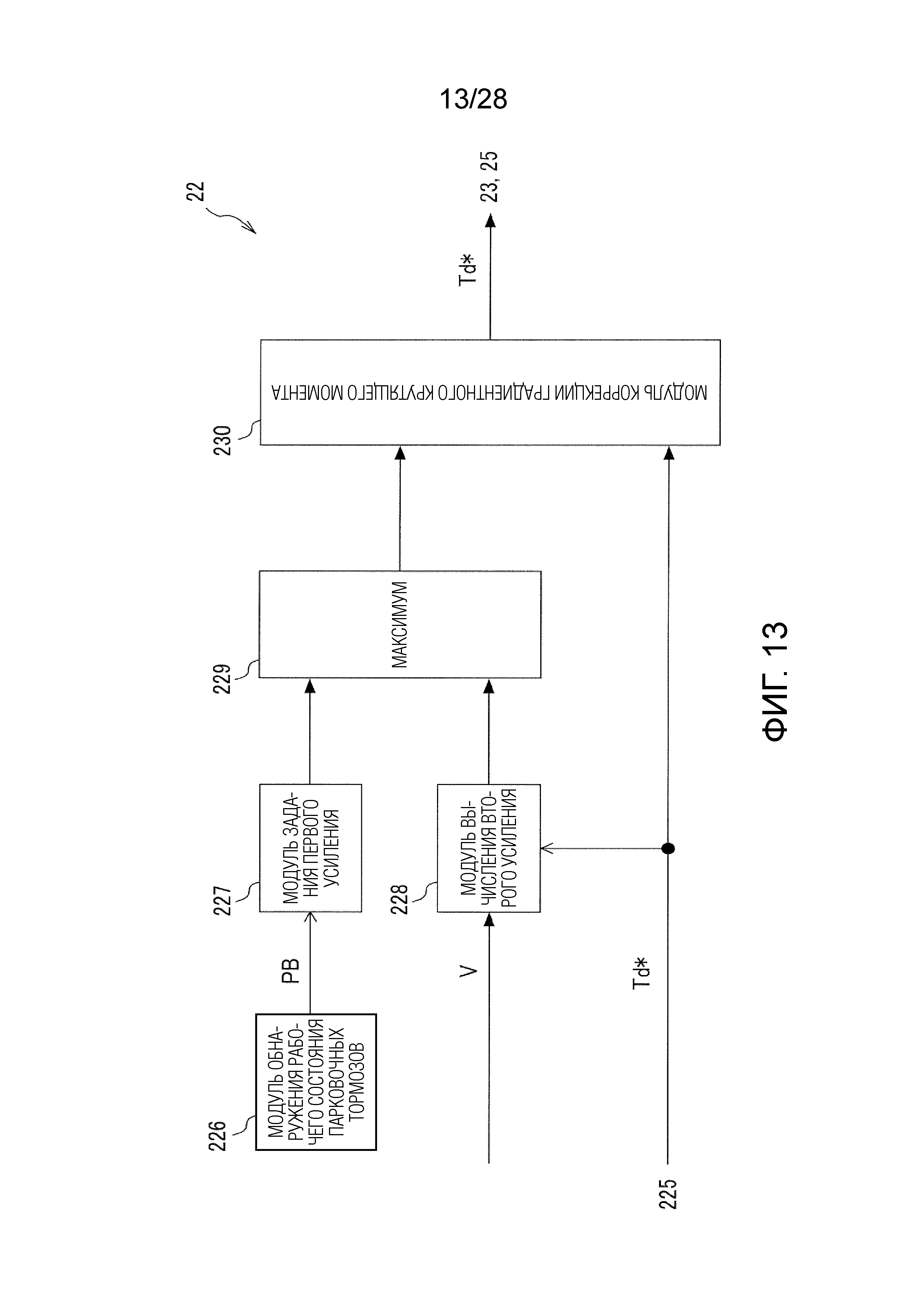
Фиг. 13 является блок-схемой, показывающей один пример конфигурации модуля вычисления градиентного крутящего момента во втором варианте осуществления настоящего изобретения.
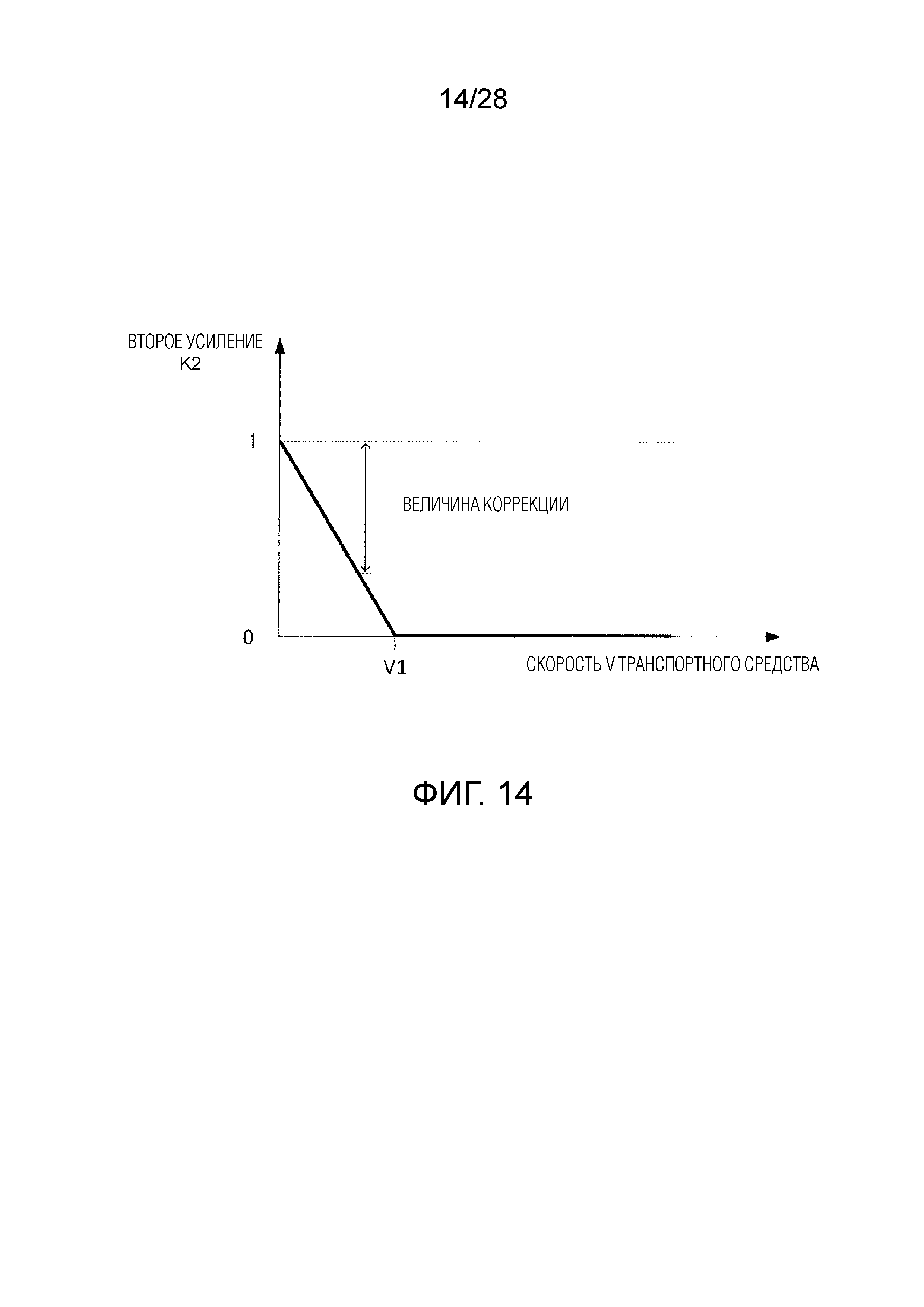
Фиг. 14 описывает способ для коррекции градиентного крутящего момента.
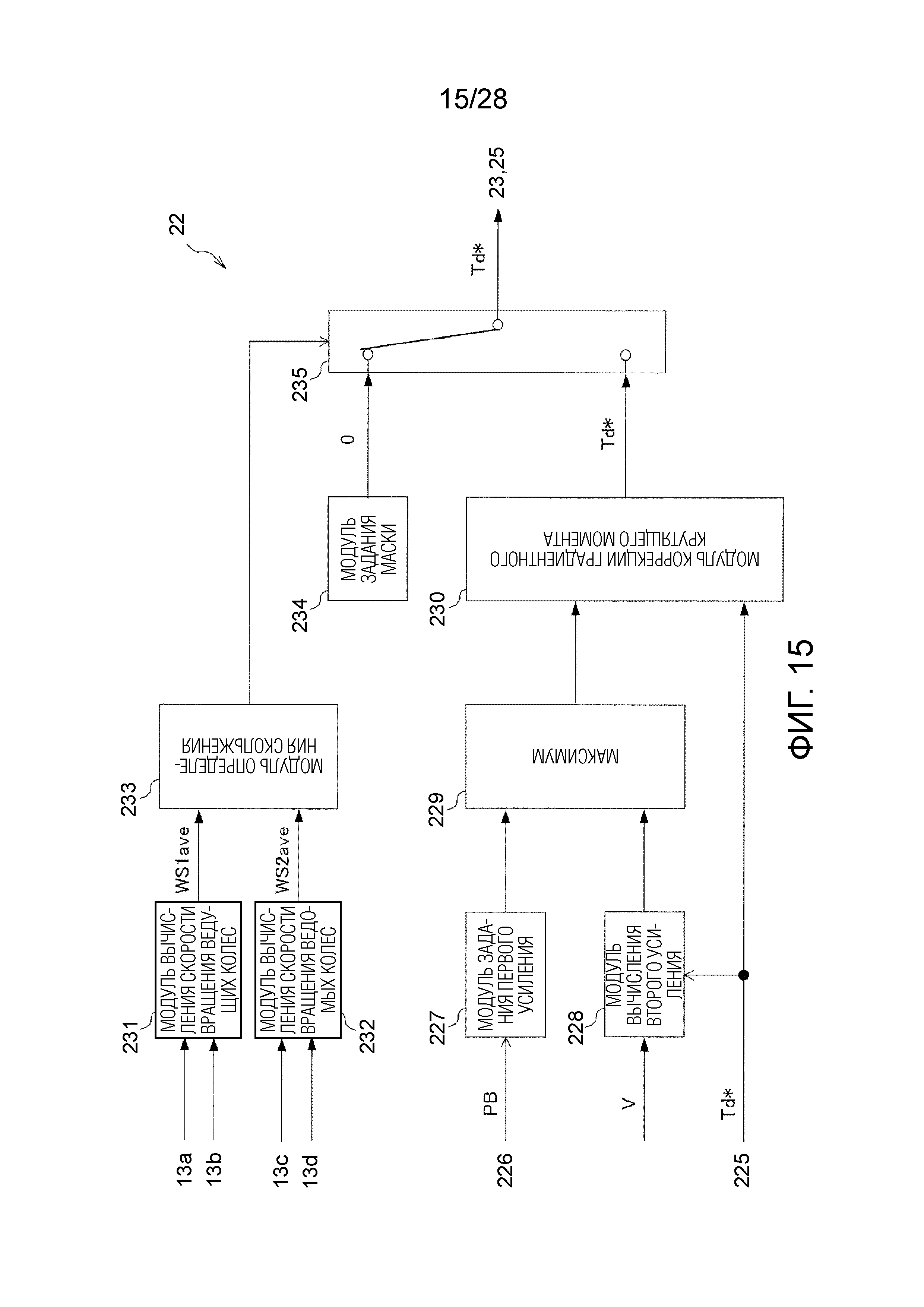
Фиг. 15 является блок-схемой, показывающей один пример конфигурации модуля вычисления градиентного крутящего момента в третьем варианте осуществления настоящего изобретения.
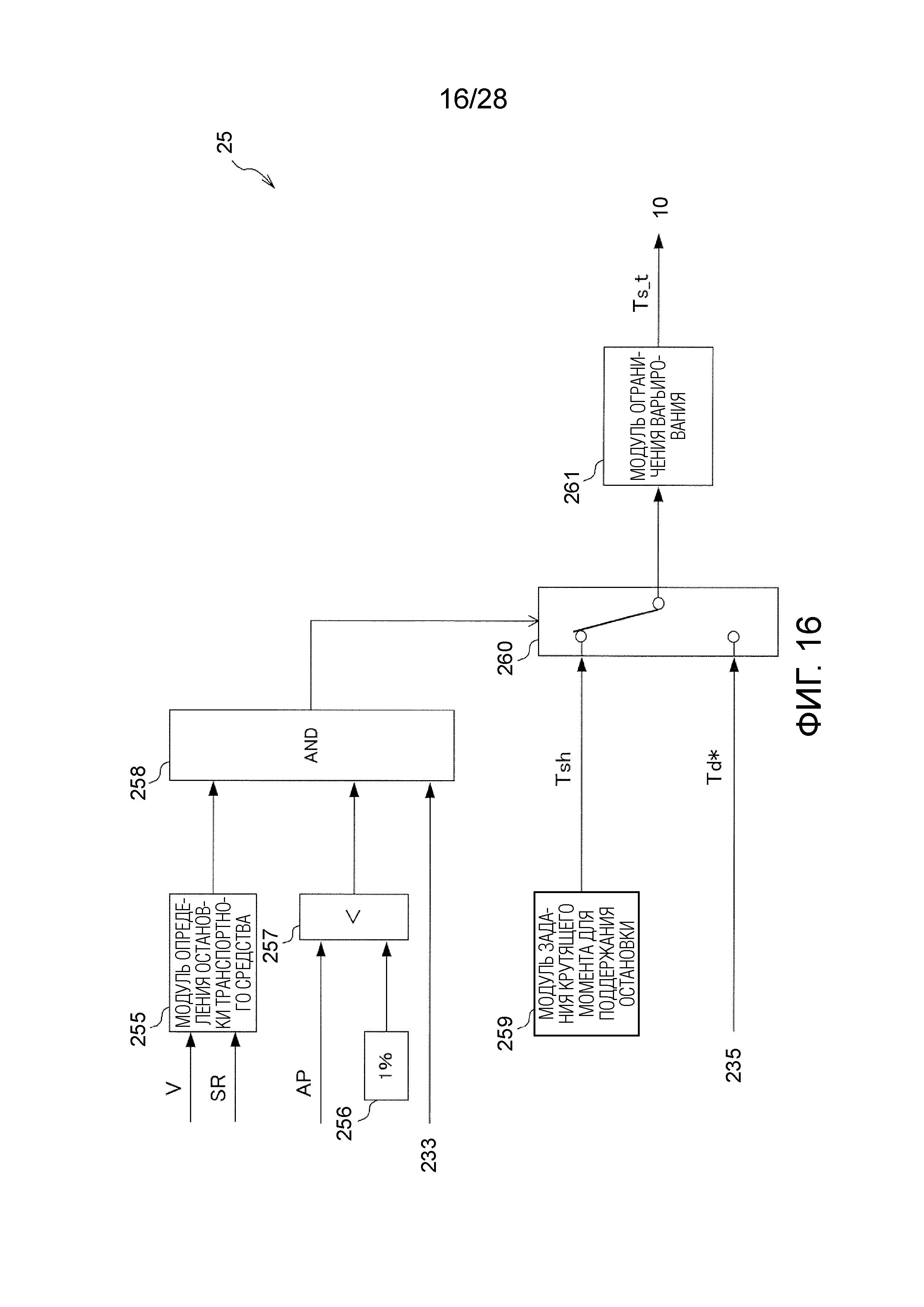
Фиг. 16 является блок-схемой, показывающей один пример конфигурации модуля вычисления целевого останавливающего крутящего момента в настоящем варианте осуществления.
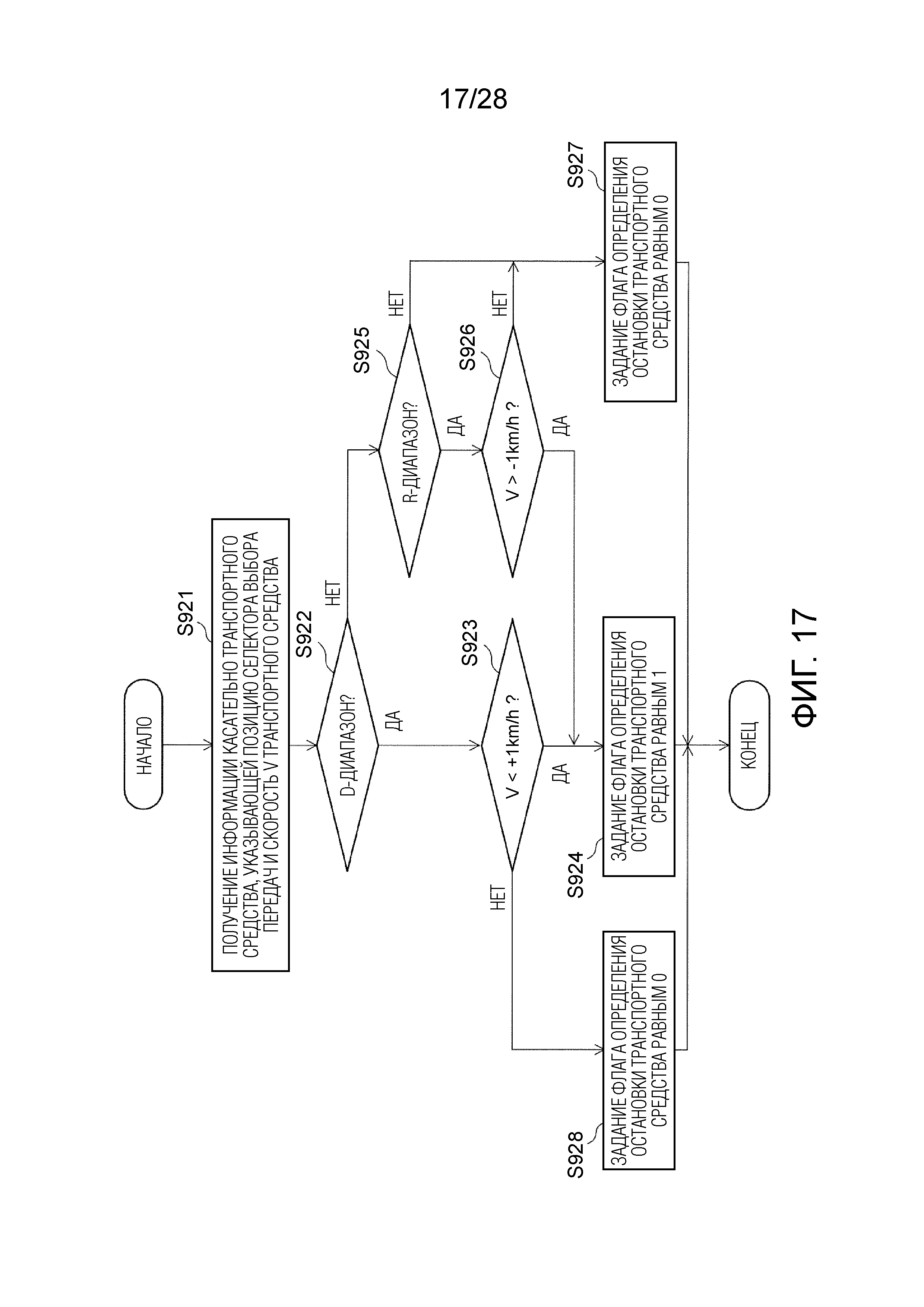
Фиг. 17 является блок-схемой последовательности операций, показывающей способ определения остановки транспортного средства.
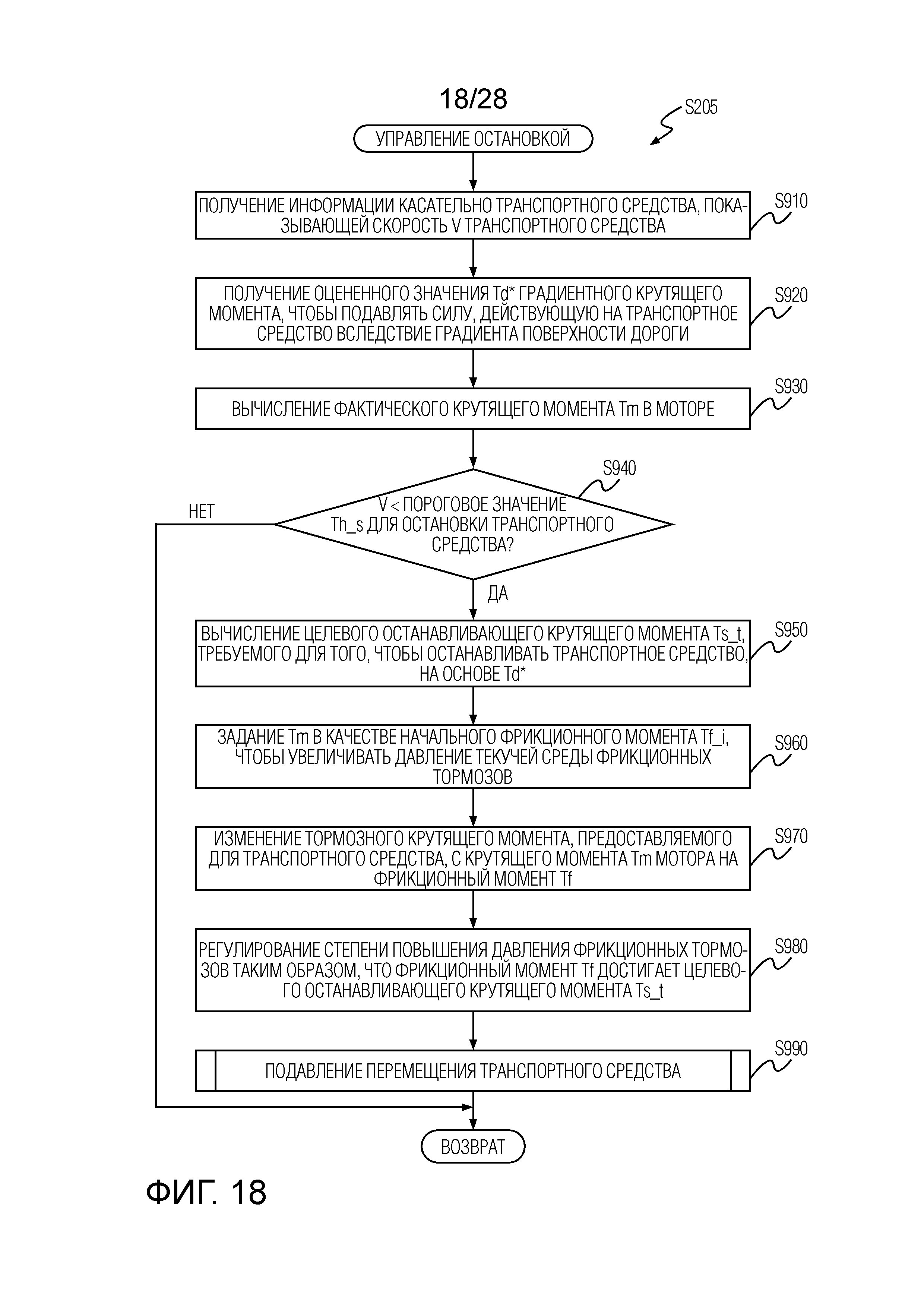
Фиг. 18 является блок-схемой последовательности операций способа, показывающей пример обработки управления остановкой в четвертом варианте осуществления настоящего изобретения.
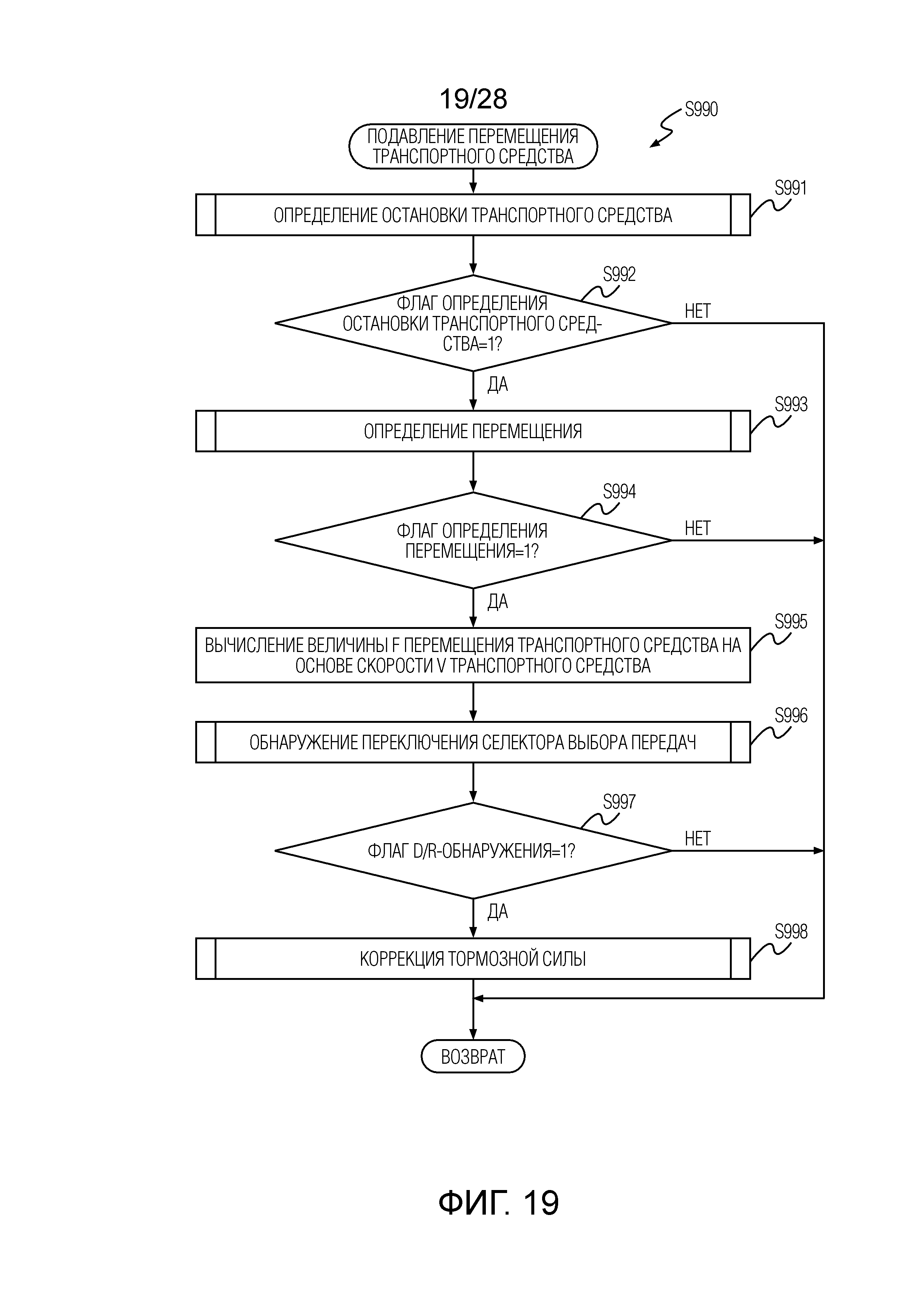
Фиг. 19 является блок-схемой последовательности операций способа, показывающей пример обработки подавления перемещения транспортного средства в обработке управления остановкой.
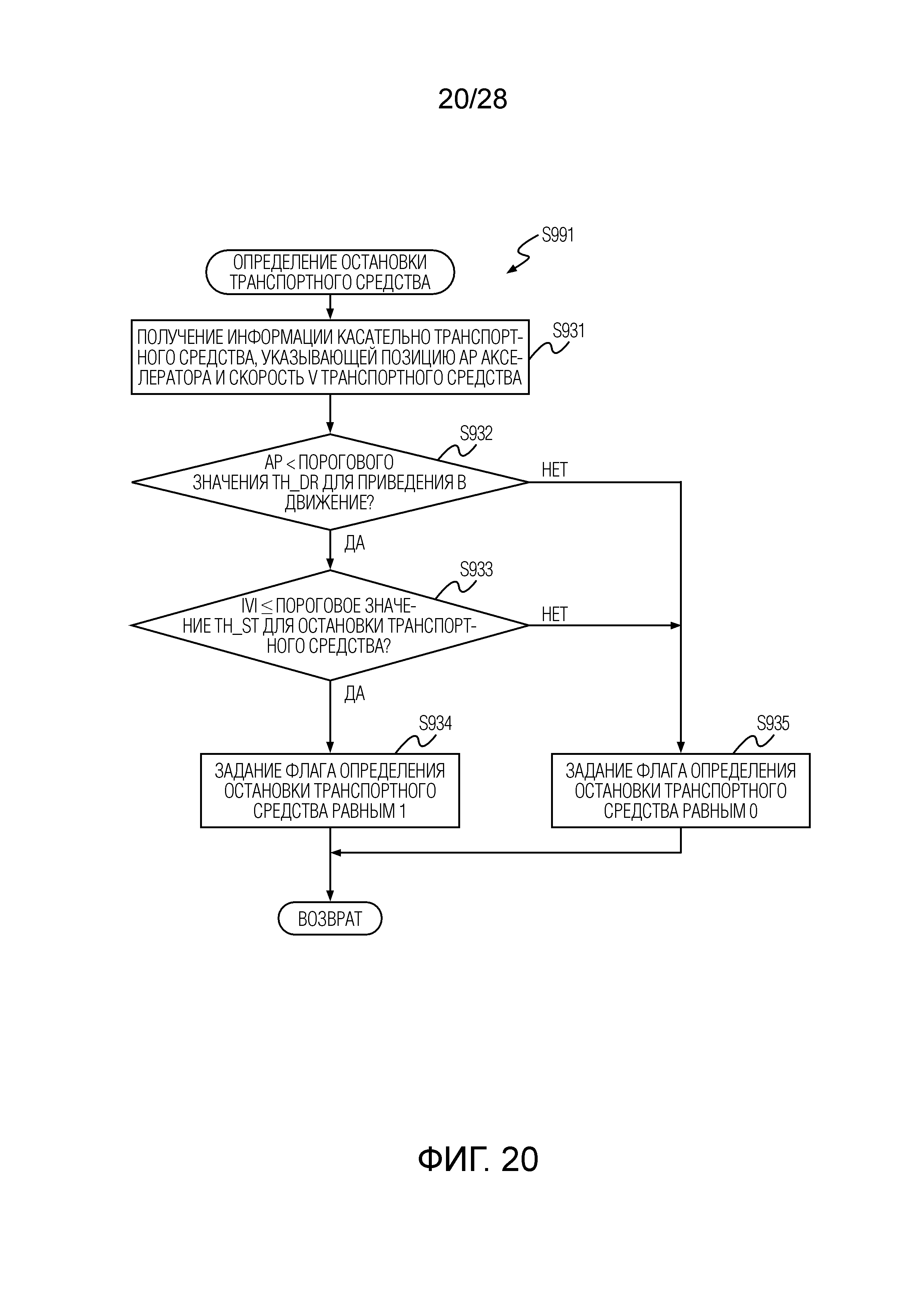
Фиг. 20 является блок-схемой последовательности операций способа, показывающей пример обработки определения остановки транспортного средства в обработке подавления перемещения транспортного средства.
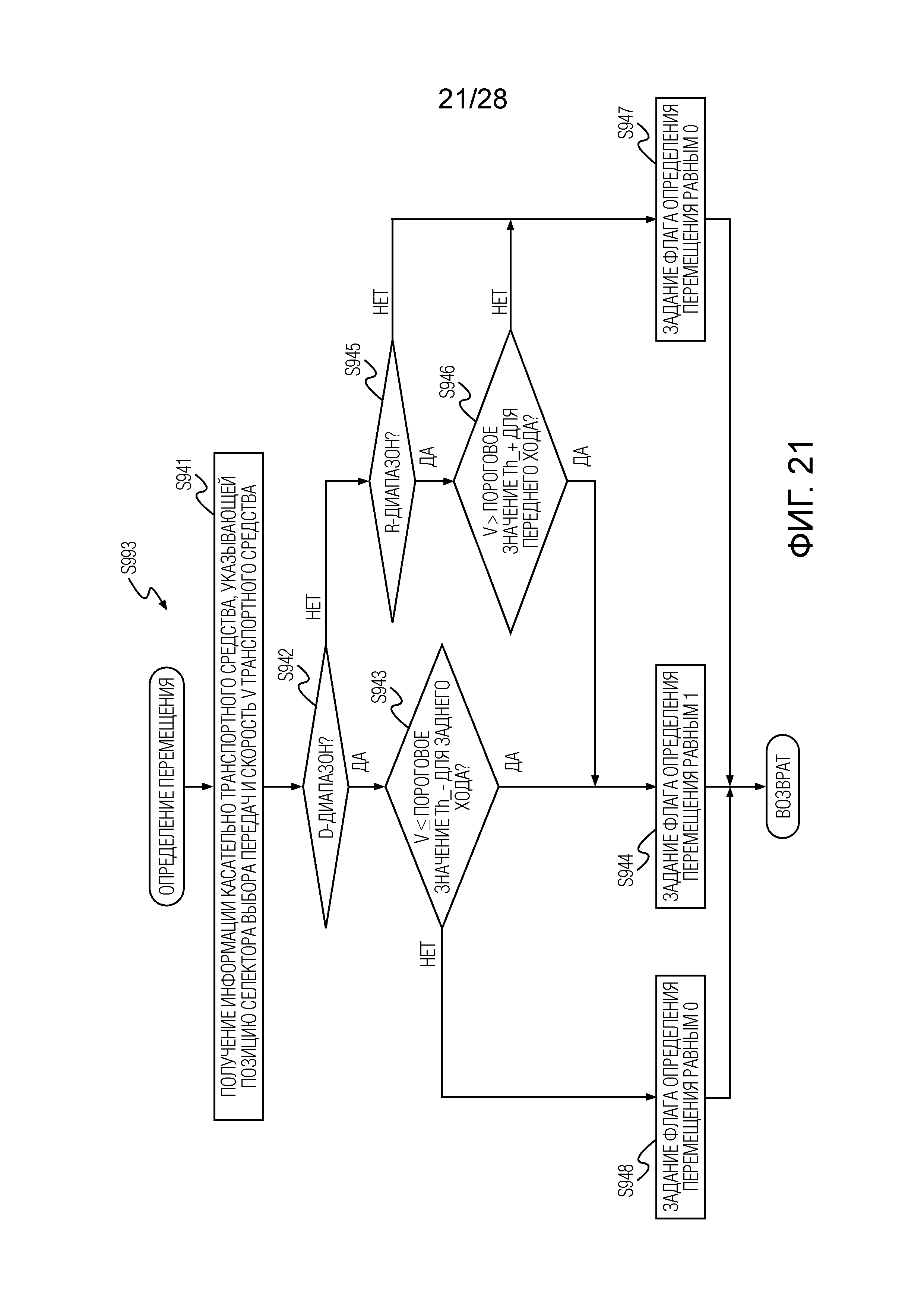
Фиг. 21 является блок-схемой последовательности операций способа, показывающей пример обработки определения перемещения.
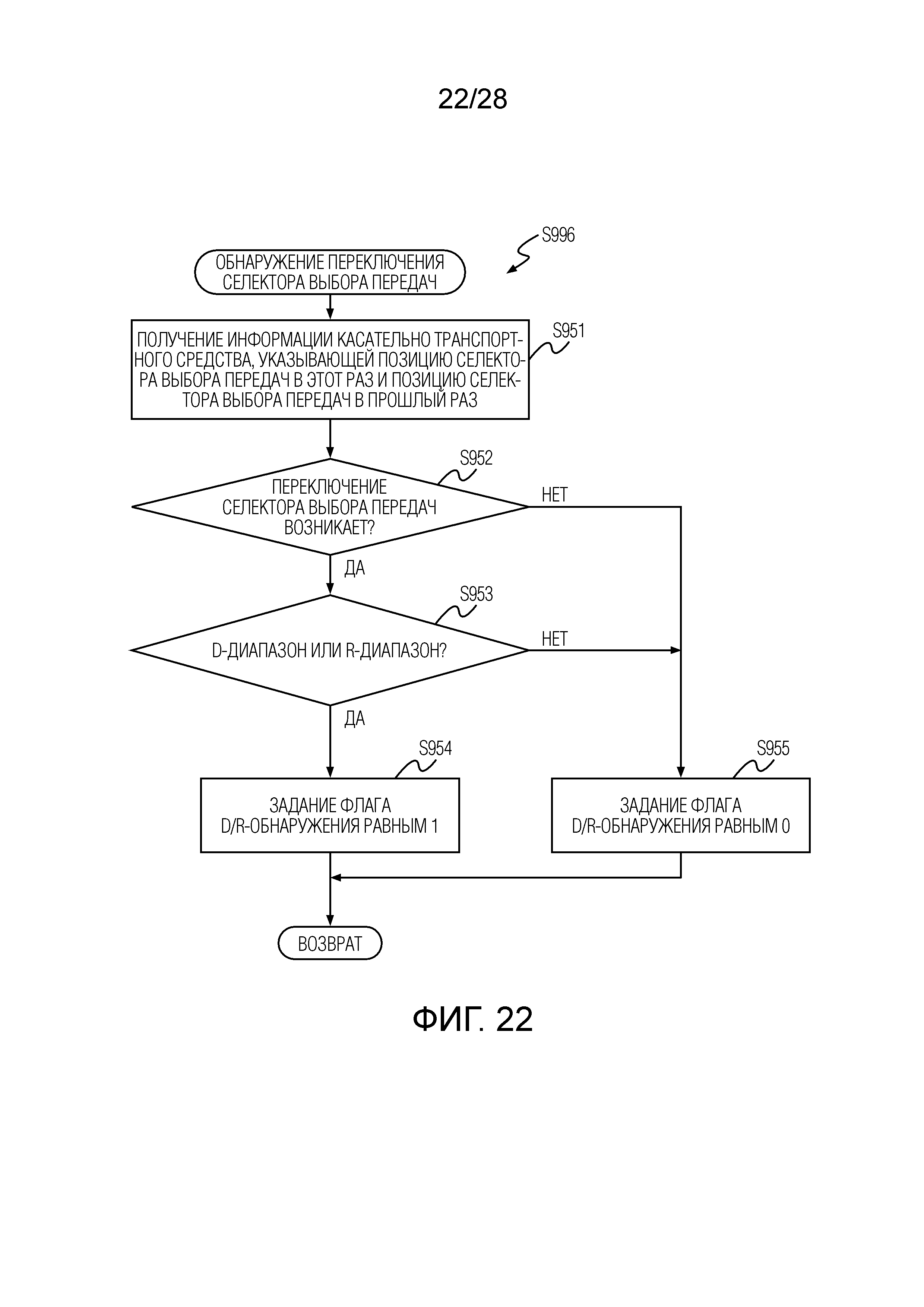
Фиг. 22 является блок-схемой последовательности операций способа, показывающей пример обработки обнаружения переключения селектора выбора передач.
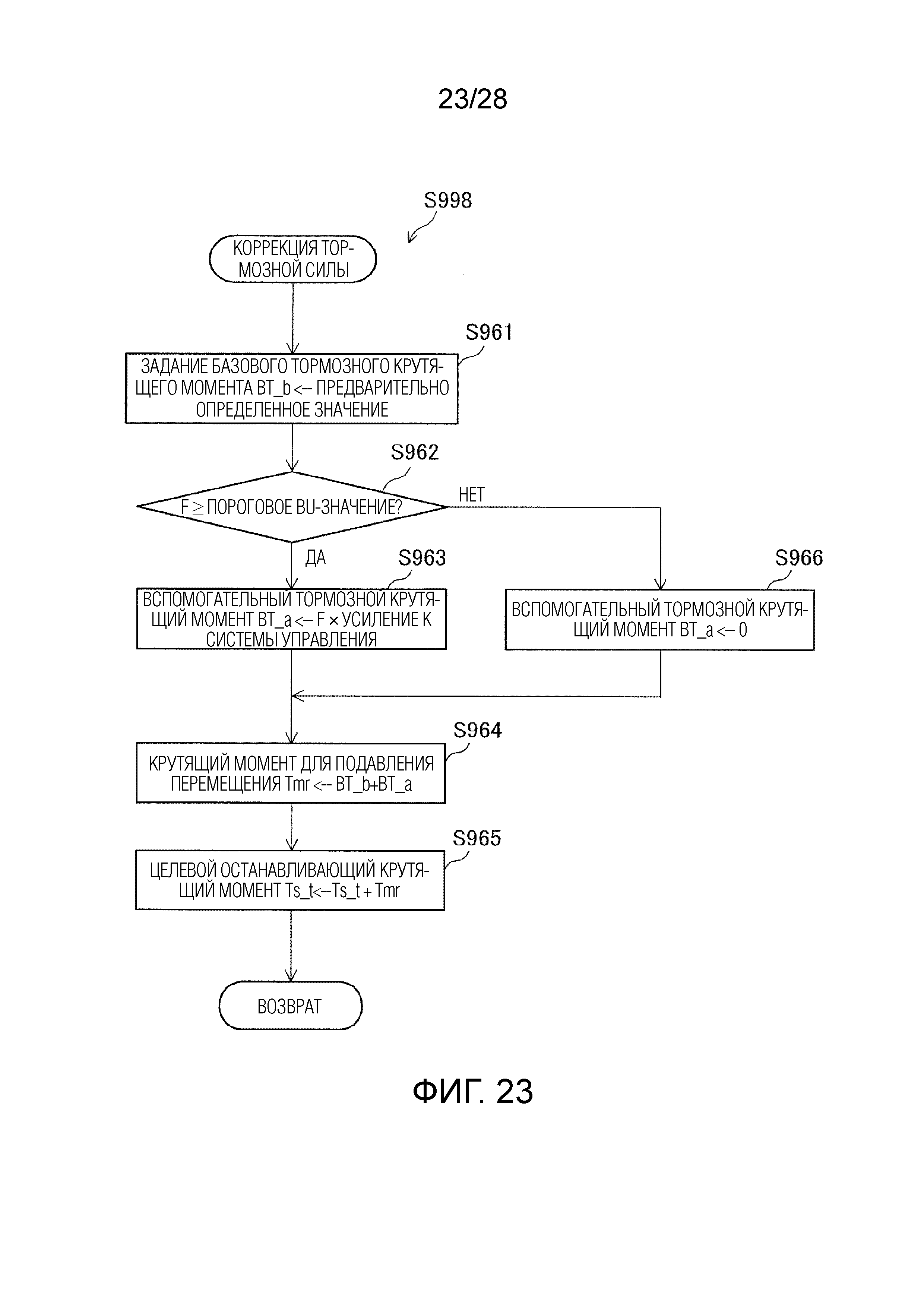
Фиг. 23 является блок-схемой последовательности операций способа, показывающей пример обработки коррекции тормозной силы.
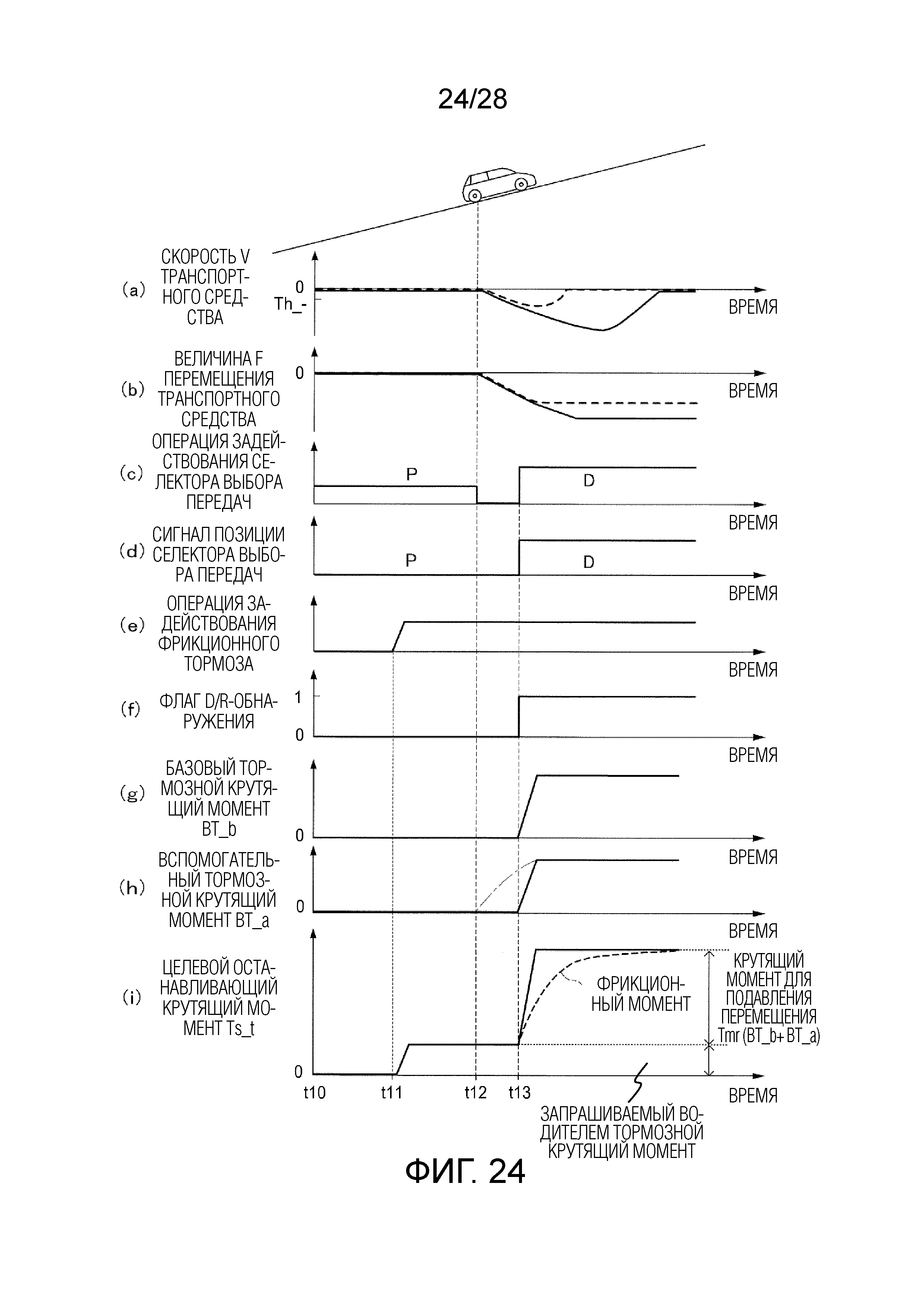
Фиг. 24 является временной диаграммой, описывающей пример способа для подавления перемещения транспортного средства в настоящем варианте осуществления.
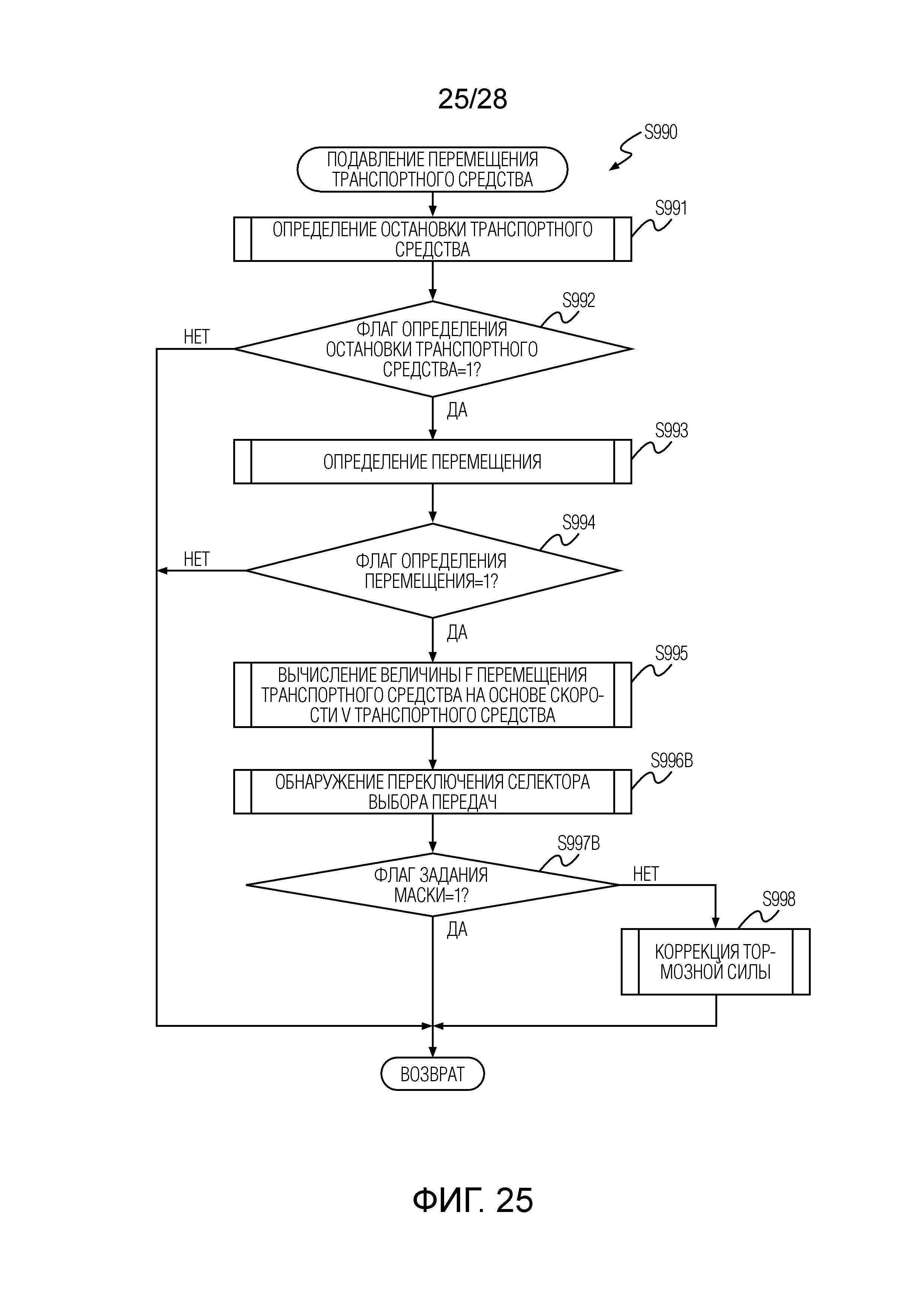
Фиг. 25 является блок-схемой последовательности операций способа, показывающей пример обработки подавления перемещения транспортного средства в пятом варианте осуществления настоящего изобретения.
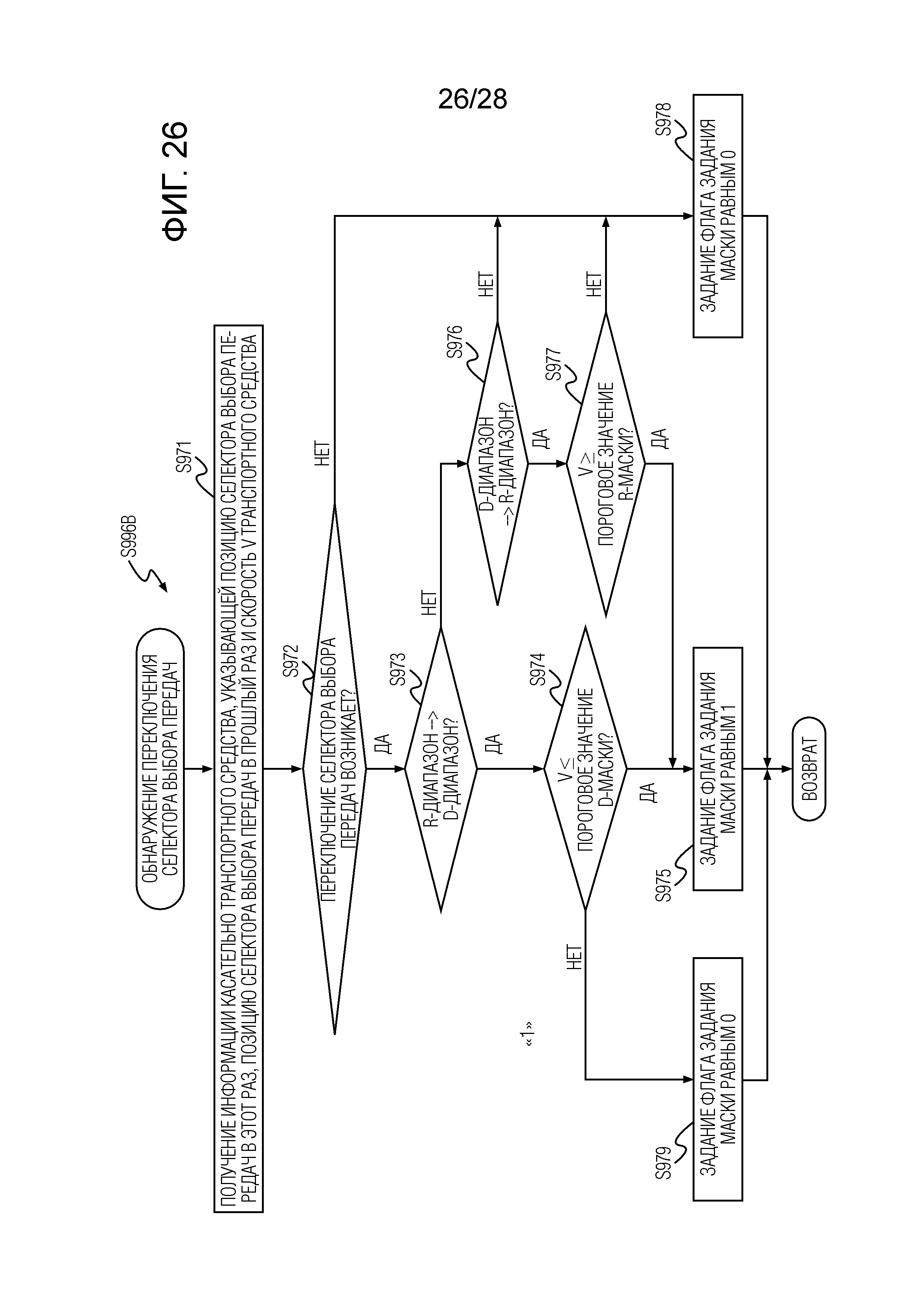
Фиг. 26 является блок-схемой последовательности операций способа, показывающей пример обработки обнаружения переключения селектора выбора передач в обработке подавления перемещения транспортного средства.
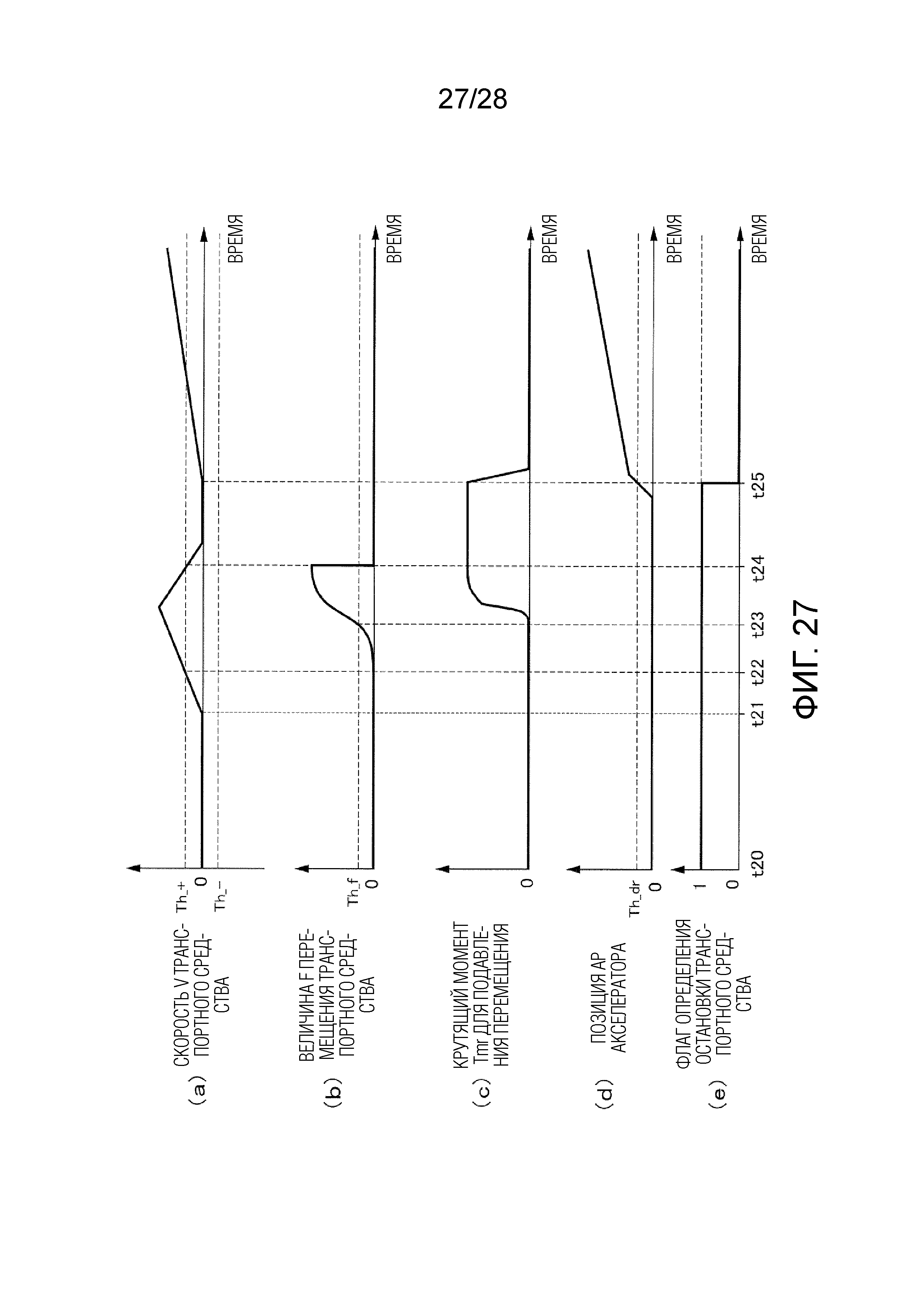
Фиг. 27 является временной диаграммой, описывающей пример способа для подавления перемещения транспортного средства в настоящем варианте осуществления.
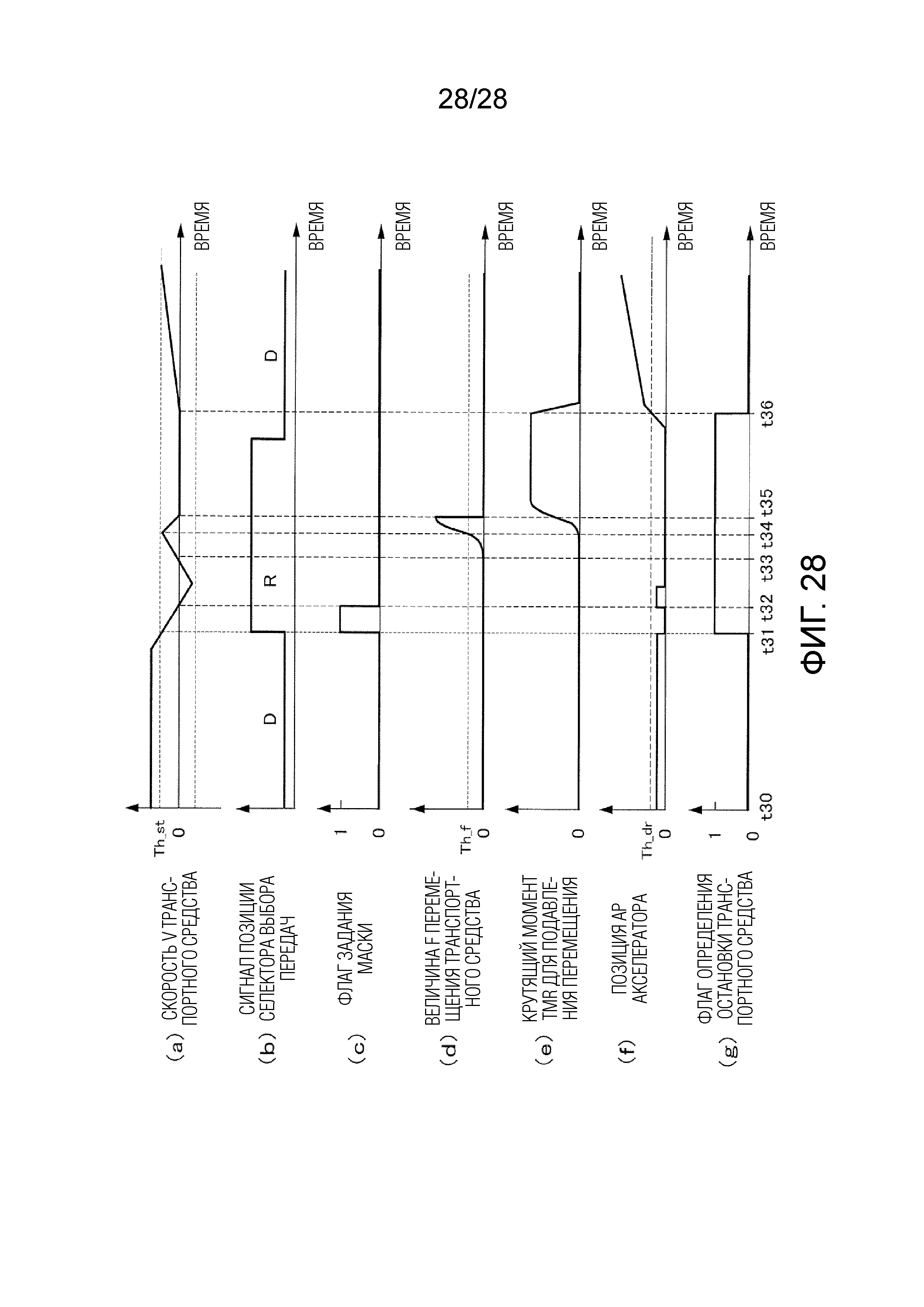
Фиг. 28 является временной диаграммой, описывающей пример способа для ограничения обработки подавления перемещения транспортного средства в настоящем варианте осуществления.
Подробное описание вариантов осуществления
[0008] Далее описываются некоторые варианты осуществления настоящего изобретения со ссылкой на прилагаемые чертежи.
[0009] Первый вариант осуществления
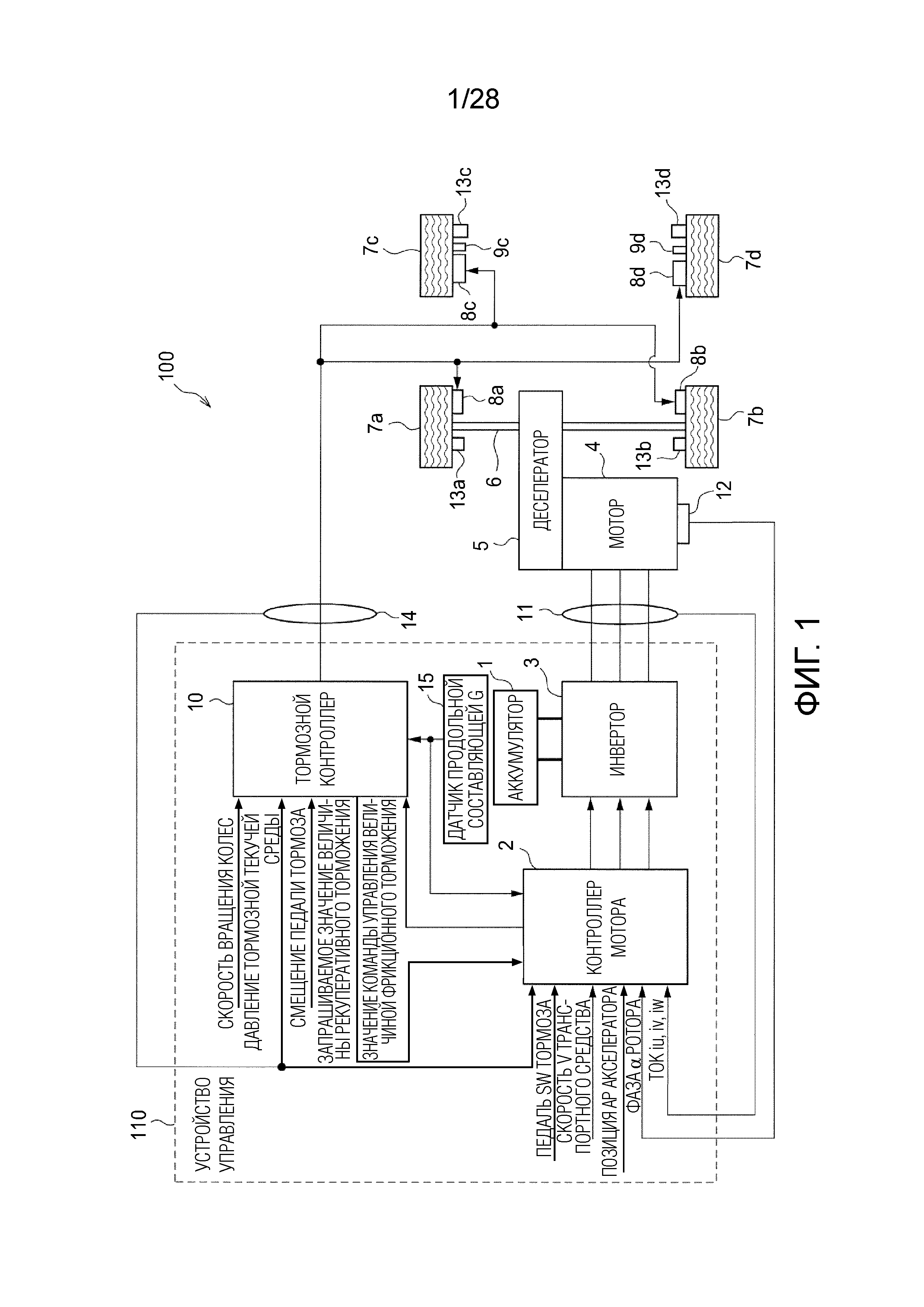
Фиг. 1 является блок-схемой, показывающей главную конфигурацию электрического транспортного средства 100, включающего в себя устройство управления согласно первому варианту осуществления настоящего изобретения.
[0010] Электрическое транспортное средство 100 включает в себя электромотор в качестве источника приведения в движение. Электрическое транспортное средство 100 настоящего варианта осуществления обеспечивает возможность водителю управлять ускорением или замедлением и остановкой электрического транспортного средства 100 посредством регулирования величины нажатия педали акселератора. Чтобы ускорять электрическое транспортное средство 100, водитель нажимает педаль акселератора вниз. Чтобы замедлять или останавливать электрическое транспортное средство 100, водитель уменьшает величину нажатия педали акселератора или регулирует величину нажатия педали акселератора до нуля.
[0011] Электрическое транспортное средство 100 включает в себя мотор 4, деселератор 5, ведущий вал 6, ведущие колеса 7a и 7b, ведомые колеса 7c и 7d, фрикционные тормоза 8a и 8d, парковочные тормоза 9c и 9d, датчик 11 тока, датчик 12 вращения, датчик 13a-13d скорости вращения колес, датчик 14 давления текучей среды и устройство 110 управления.
[0012] Устройство 110 управления управляет работой электрического транспортного средства 100. Устройство 110 управления включает в себя программируемый центральный процессор (CPU) и запоминающее устройство, соединенное с CPU. CPU включает в себя внутренние запоминающие устройства, такие как постоянное запоминающее устройство (ROM) и оперативное запоминающее устройство (RAM), чтобы сохранять управляющую программу, причем программа указывает различные типы процедуры, такие как обработка управления скоростью транспортного средства, и другие требуемые данные. Эти программы реализуют различные средства для электрического транспортного средства 100. Устройство 110 управления включает в себя аккумулятор 1, контроллер 2 мотора, инвертор 3, тормозной контроллер 10 и датчик 15 продольной составляющей G.
[0013] Аккумулятор 1 представляет собой источник электрической мощности, чтобы подавать электричество в мотор 4 в качестве электромотора. В одном примере, аккумулятор 1 включает в себя свинцовый аккумулятор или литий-ионный аккумулятор.
[0014] Контроллер 2 мотора составляет устройство управления, чтобы управлять рабочим состоянием электрического транспортного средства 100. Контроллер 2 мотора включает в себя микрокомпьютер, включающий в себя центральный процессор (CPU) и интерфейс ввода-вывода (интерфейс ввода-вывода). Контроллер 2 мотора предоставляет тормозной крутящий момент в электрическое транспортное средство 100 посредством мотора 4, например, в соответствии с рабочим состоянием электрического транспортного средства 100.
[0015] Контроллер 2 мотора принимает сигналы, указывающие состояние транспортного средства, в качестве ввода, такие как скорость V транспортного средства, позиция AP акселератора (или степень открытия акселератора), фаза α ротора мотора 4 и токи iu, iv, iw, подаваемые в мотор 4. Контроллер 2 мотора затем формирует сигнал PWM (широтно-импульсной модуляции), чтобы управлять работой мотора 4 на основе входных сигналов, и создает сигнал приведения в действие для инвертора 3 в соответствии со сформированным PWM-сигналом. Контроллер 2 мотора также формирует значение команды управления величиной фрикционного торможения посредством способа, описанного ниже.
[0016] Инвертор 3 включает в себя два переключающих элемента (например, силовые полупроводниковые устройства, такие как IGBT и MOSFET), соответствующие фазам мотора 4. Инвертор 3 включает/выключает каждый переключающий элемент в соответствии с PWM-сигналом, сформированным посредством контроллера 2 мотора. Это преобразует постоянный ток, подаваемый из аккумулятора 1 в мотор 4, в переменный ток, так что требуемый ток подается в мотор 4.
[0017] Мотор 4 представляет собой электромотор, чтобы предоставлять движущую силу и тормозную силу в электрическое транспортное средство 100. В одном примере, мотор трехфазного переменного тока реализует мотор. Мотор 4 формирует движущую силу при приеме переменного тока из инвертора 3 и передает движущую силу на левое и правое ведущие колеса 9a и 9b через деселератор 5 и ведущий вал 6.
[0018] При вращении согласно вращению ведущих колес 9a, 9b во время движения электрического транспортного средства 100, мотор 4 формирует рекуперативную движущую силу. Инвертор 3 преобразует переменный ток, сформированный посредством рекуперативной движущей силы мотора 4, в постоянный ток и подает постоянный ток в аккумулятор 1. Таким образом, мотор 4 преобразует кинетическую энергию электрического транспортного средства 100 в электрическую энергию, и аккумулятор 1 заряжается электрической энергией. Таким образом, аккумулятор 1 собирает кинетическую энергию.
[0019] Ведущие колеса 7a и 7b передают движущую силу на поверхность дороги во время приведения в движение электрического транспортного средства 100. Ведомые колеса 7c и 7d приводятся в движение посредством ведущих колес 7a и 7b электрического транспортного средства 100. Далее эти ведущие колеса 7a и 7b и ведомые колеса 7c и 7d называются "колесами".
[0020] Фрикционные тормоза 8a-8d составляют механизм фрикционного торможения, чтобы предоставлять фрикционную тормозную силу в электрическое транспортное средство 100. Фрикционные тормоза 8a-8d настоящего варианта осуществления выполнены с возможностью формировать фрикционную тормозную силу (фрикционный момент), когда рекуперативная тормозная сила мотора 4 превышает верхний предел, либо когда мотор 4 не может подавать тормозной крутящий момент вследствие состояния заряда аккумулятора 1 и состояния скольжения ведущих колес 7a и 7b.
[0021] Фрикционные тормоза 8a и 8b располагаются в левом и правом ведущих колесах 7a и 7b, и фрикционные тормоза 8c и 8d располагаются в левом и правом ведомых колесах 7c и 7d. Чтобы предоставлять фрикционную тормозную силу в электрическое транспортное средство 100, каждый из фрикционных тормозов 8a-8d прижимает тормозную колодку соответствующего колеса (7a-7d) к тормозному ротору с помощью давления текучей среды, подаваемой непосредственно во фрикционный тормоз, называемого "давлением тормозной текучей среды". В настоящем варианте осуществления, тормозное масло используется в качестве текучей среды, которая должна подаваться во фрикционные тормоза 8a-8d.
[0022] Парковочные тормоза 9c и 9d составляют механизм фрикционного торможения, чтобы предоставлять фрикционную тормозную силу в электрическое транспортное средство 100. Парковочные тормоза 9c и 9d предоставляют фрикционную тормозную силу на ведомые колеса 7c и 7d, чтобы поддерживать электрического транспортного средства 100 остановленным, т.е. в состоянии парковки. В одном примере, фрикционный тормоз барабанного типа или проводного типа может реализовывать парковочные тормоза 9c и 9d. В одном примере, когда водитель тянет рычаг парковки электрического транспортного средства 100, парковочные тормозы 9c и 9d действуют с возможностью переводить транспортное средство в состояние парковки.
[0023] Датчик 11 тока определяет трехфазные переменные токи iu, iv и iw, которые инвертор подает в мотор 4. Следует отметить, что поскольку сумма трехфазных переменных токов iu, iv и iw равна 0, токи двух произвольных фаз могут определяться, и ток оставшейся одной фазы может получаться посредством вычисления.
[0024] Датчик 12 вращения определяет фазу α ротора мотора 4. В одном примере, датчик 12 вращения включает в себя круговой датчик позиции и датчик позиции.
[0025] Датчики 13a-13d скорости вращения колес определяют скорость вращения колес, включающих в себя ведущие колеса 7a и 7b и ведомые колеса 7c и 7d, соответственно.
[0026] Датчик 14 давления текучей среды определяет давление тормозной текучей среды, которое представляет собой давление масла, подаваемого во фрикционные тормоза 8a-8d.
[0027] Датчик 15 продольной составляющей G определяет продольную составляющую G, которая представляет собой продольное ускорение относительно направления движения электрического транспортного средства 100.
[0028] Тормозной контроллер 10 вместе с контроллером 2 мотора составляет устройство управления электрического транспортного средства 100. Тормозной контроллер 10 вычисляет требуемую тормозную силу (требуемый тормозной крутящий момент) на основе смещений педали акселератора и педали тормоза. Тормозной контроллер 10 затем назначает требуемую тормозную силу как рекуперативную тормозную силу и фрикционную тормозную силу в соответствии с состоянием транспортного средства, таким как скорость V транспортного средства, рекуперативная тормозная сила, состояние скольжения, недостаточная поворачиваемость и избыточная поворачиваемость.
[0029] Тормозной контроллер 10 управляет давлением тормозной текучей среды фрикционных тормозов 8a-8d в соответствии со значением команды управления величиной фрикционного торможения, вычисленным посредством контроллера 2 мотора. Тормозной контроллер 10 управляет с обратной связью таким образом, что давление тормозной текучей среды, определенное посредством датчика 14 давления текучей среды, придерживается значения, определенного в соответствии со значением команды управления величиной фрикционного торможения.
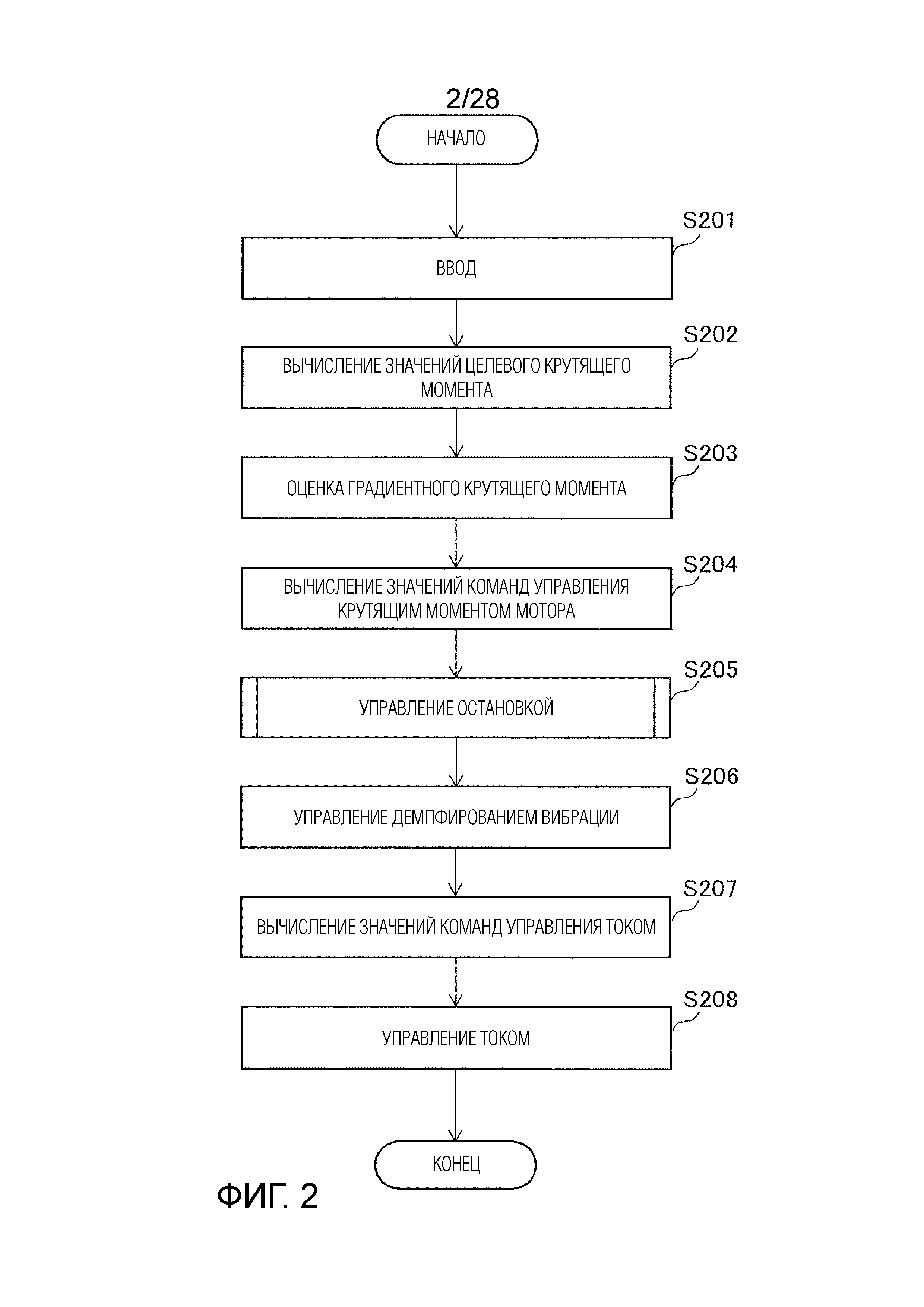
[0030] Фиг. 2 является блок-схемой последовательности операций способа, показывающей пример процедуры обработки управления мотором, выполняемой посредством контроллера 2 мотора.
[0031] На этапе S201, контроллер 2 мотора принимает сигнал состояния транспортного средства, указывающий состояние электрического транспортного средства 100, в качестве ввода. В этом примере, контроллер мотора принимает, в качестве сигналов состояния транспортного средства, скорость V транспортного средства (м/с), позицию AP акселератора (%), фазу α ротора (рад) мотора 4, частоту ωm вращения мотора (об/мин/с), трехфазные переменные токи iu, iv, iw, значение Vdc постоянного напряжения аккумулятора 1 (В), оцененное значение B величины фрикционного торможения и педаль SW тормоза.
[0032] Скорость V транспортного средства (м/с) представляет собой скорость вращения колес для ведущих колес 7a и 7b и ведомых колес 7c и 7d. Скорость V транспортного средства получается из датчика скорости транспортного средства (не проиллюстрирован) или из другого контроллера через связь. Альтернативно, скорость V транспортного средства (км/ч) получается посредством умножения частоты ωm вращения мотора (механической угловой скорости вращения) на динамический радиус r шины и деления произведения на передаточное отношение главной передачи.
[0033] Позиция AP акселератора (%) представляет собой параметр, указывающий смещение педали акселератора, и получается из датчика позиции акселератора (не проиллюстрирован). Альтернативно позиция AP акселератора получается из другого контроллера, такого как контроллер транспортного средства (не проиллюстрирован), через связь.
[0034] Фаза α вращения (рад) мотора 4 получается из датчика 12 вращения. Частота Nm вращения (об/мин) мотора 4 вычисляется посредством деления угловой скорости ω вращения (электрического угла) на номер p полюсной пары мотора 4, чтобы получать частоту ωm вращения мотора (рад/с) (параметр скорости/частоты вращения), которая представляет собой механическую угловую скорость мотора 4, и умножения полученной частоты ωm вращения мотора на 60/(2π). Угловая скорость ωm вращения вычисляется посредством дифференцирования фазы α вращения.
[0035] Трехфазные переменные токи iu, iv и iw (А) получаются из датчика 11 тока.
[0036] Значение Vdc постоянного напряжения (В) получается из датчика напряжения (не проиллюстрирован), расположенного в линии источника мощности постоянного тока, соединяющей аккумулятор 1 и инвертор 3. Значение Vdc постоянного напряжения (В) может получаться из значения напряжения источника мощности, передаваемого из контроллера аккумулятора (не проиллюстрирован).
[0037] Оцененное значение B величины фрикционного торможения получается на основе давления тормозной текучей среды, которое получается посредством датчика 14 давления текучей среды. Альтернативно определенное значение посредством датчика хода (не проиллюстрирован), чтобы определять величину нажатия педали тормоза водителем, может использоваться для оцененного значения B величины фрикционного торможения. Альтернативно, значение команды управления величиной фрикционного торможения, сформированное посредством контроллера 2 мотора или другого контроллера, может получаться через связь, и полученное значение команды управления величиной фрикционного торможения может использоваться в качестве оцененного значения B величины фрикционного торможения.
[0038] Педаль SW тормоза представляет собой сигнал переключения, чтобы определять то, выполняет или нет водитель нажатие педали тормоза, т.е. операцию торможения. Педаль SW тормоза получается из тормозного переключателя (не проиллюстрирован), присоединенного к педали тормоза. Педаль тормоза SW=1 указывает то, что водитель нажимает педаль тормоза, и педаль тормоза SW=0 указывает то, что водитель не нажимает педаль тормоза.
[0039] На этапе S202, контроллер 2 мотора выполняет обработку вычисления значений целевого крутящего момента.
[0040] Более конкретно, контроллер 2 мотора задает значение Tm_t целевого крутящего момента при обращении к предварительно определенной таблице вычислений на основе позиции AP акселератора и частоты ωm вращения мотора, вводимых на этапе S201. Фиг. 3 показывает таблицу позиций акселератора и крутящих моментов в качестве примера таблицы вычислений.
[0041] На этапе S203, контроллер 2 мотора выполняет обработку оценки градиентного крутящего момента на основе частоты ωm вращения мотора и значения Tm_t целевого крутящего момента.
[0042] Более конкретно, контроллер 2 мотора вычисляет оцененное значение Td* градиентного крутящего момента, чтобы приводить в действие мотор 4 в направлении подавления сопротивления вследствие градиента, действующего на электрическое транспортное средство 100, на основе модуля наблюдения возмущений в соответствии с частотой ωm вращения мотора и значением Tm_t целевого крутящего момента. Модуль наблюдения возмущений сконфигурирован с использованием модели транспортного средства, которая показывает моделируемый режим работы электрического транспортного средства 100. Модель транспортного средства получается посредством уравнений движения.
[0043] Контроллер 2 мотора затем преобразует фрикционную тормозную силу, которую фрикционные тормоза 8a-8d предоставляют электрическое транспортное средство 100, в крутящий момент мотора 4, чтобы получать фрикционный момент, и вычитает полученный фрикционный момент из оцененного значения Td* градиентного крутящего момента, чтобы вычислять новое оцененное значение Td* градиентного крутящего момента.
[0044] Оцененное значение Td* градиентного крутящего момента меняется в зависимости от возмущений, таких как ошибка моделирования электрического транспортного средства 100, сопротивление воздуха и сопротивление вследствие градиента, действующее на электрическое транспортное средство 100, и сопротивление качения шин. Из этих факторов, доминирующий компонент для оцененного значения Td градиентного крутящего момента представляет собой сопротивление вследствие градиента. Оцененное значение Td градиентного крутящего момента в силу этого имеет положительное значение на дорогах, идущих в подъем, имеет отрицательное значение на дорогах, идущих под спуск, и равно практически 0 на ровных дорогах.
[0045] Ошибка моделирования увеличивается с увеличением числа пассажиров и количества багажа на электрическом транспортном средстве 100, например, поскольку вес электрического транспортного средства 100 значительно отличается между заданным значением, заданным для модели транспортного средства, и фактическим значением. Ниже описываются подробности обработки оценки градиентного крутящего момента.
[0046] На этапе S204, контроллер 2 мотора выполняет обработку вычисления значений команд управления крутящим моментом мотора.
[0047] Более конкретно, контроллер 2 мотора суммирует оцененное значение Td* градиентного крутящего момента, вычисленное на этапе S203, со значением Tm_t целевого крутящего момента, вычисленным на этапе S202, и задает сумму в качестве значения Tm* команды управления крутящим моментом мотора, которое указывает значение команды управления крутящим моментом мотора 4.
[0048] Такое суммирование оцененного значения Td* градиентного крутящего момента со значением Tm_t целевого крутящего момента обеспечивает подавление сопротивления вследствие градиента, действующего на электрическое транспортное средство 100. Следовательно, оно формирует крутящий момент Tm мотора, удовлетворяющий требованию водителя.
[0049] Например, для электрического транспортного средства 100 на дороге, идущей в подъем, значение Tm* команды управления крутящим моментом мотора включает в себя крутящий момент мотора, прибавляемый с возможностью подавлять силу из силы тяжести, чтобы возвращать электрическое транспортное средство 100 против направления движения. Это обеспечивает возможность водителю уменьшать дополнительную операцию нажатия для педали акселератора.
[0050] Для электрического транспортного средства 100 на дороге, идущей под спуск, значение Tm* команды управления крутящим моментом мотора включает в себя крутящий момент мотора, прибавляемый с возможностью подавлять чрезмерную силу из силы тяжести в направлении движения электрического транспортного средства 100. Это сокращает число операций водителя по смене ступней ног с педали акселератора на педаль тормоза.
[0051] На этапе S205, контроллер 2 мотора выполняет обработку управления остановкой, чтобы плавно останавливать электрическое транспортное средство 100.
[0052] Чтобы останавливать электрическое транспортное средство 100, контроллер 2 мотора настоящего варианта осуществления изменяет тормозную силу, предоставленную в электрическое транспортное средство 100, с рекуперативной тормозной силы мотора 4 на фрикционную тормозную силу фрикционных тормозов 8a-8d.
[0053] Более конкретно, контроллер 2 мотора определяет то, останавливается или нет электрическое транспортное средство 100, т.е. то, находится или нет электрическое транспортное средство 100 в момент времени непосредственно перед остановкой. Например, когда скорость V транспортного средства опускается ниже порогового значения для остановки транспортного средства, контроллер 2 мотора определяет то, что электрическое транспортное средство 100 находится в момент времени непосредственно перед остановкой.
[0054] Это пороговое значение для остановки транспортного средства задается равным нижнему предельному значению в диапазоне, в котором скорость транспортного средства для электрического транспортного средства 100 может точно определяться. Это обеспечивает обработку управления остановкой непосредственно перед остановкой. В одном примере, когда датчик скорости транспортного средства имеет минимальное считывание скорости в 5 км (км/ч) час, пороговое значение для остановки транспортного средства задается равным скорости в 5 км/час. Рекуперативная тормозная сила является более точно управляемой, чем фрикционная тормозная сила, и в силу этого меньшее пороговое значение для остановки транспортного средства и рекуперативная тормозная сила обеспечивают возможность поддержания длительного времени для торможения электрического транспортного средства 100. Следовательно, это подавляет уменьшение точности управления тормозной силой.
[0055] Когда контроллер 2 мотора определяет то, что электрическое транспортное средство 100 находится в момент времени непосредственно перед остановкой, контроллер 2 мотора управляет работой фрикционных тормозов 8a-8d таким образом, что фрикционная тормозная сила фрикционных тормозов 8a-8d достигает тормозной силы, определенной в соответствии с оцененным значением Td* градиентного крутящего момента.
[0056] Контроллер 2 мотора настоящего варианта осуществления вычисляет целевой останавливающий крутящий момент в соответствии с оцененным значением Td* градиентного крутящего момента и выводит вычисленный целевой останавливающий крутящий момент в качестве значения команды управления величиной фрикционного торможения в тормозной контроллер 10. Целевой останавливающий крутящий момент в этом случае задается равным значению таким образом, чтобы надежно останавливать транспортное средство при подавлении скольжения вниз (перемещения) электрического транспортного средства 100 вследствие градиента поверхности дороги.
[0057] Например, целевой останавливающий крутящий момент может вычисляться посредством суммирования предварительно определенного дополнительного тормозного крутящего момента в ассоциации с оцененным значением Td* градиентного крутящего момента. Такой дополнительный тормозной крутящий момент, например, определяется с учетом ошибки в вычислении оцененного значения Td градиентного крутящего момента и изменения температуры масла, подаваемого во фрикционные тормоза 8a-8d.
[0058] Более конкретно, фрикционная тормозная сила, сформированная посредством фрикционных тормозов 8a-8d, меняется в зависимости от температуры масла фрикционных тормозов 8a-8d, и дополнительный тормозной крутящий момент в силу этого определяется с учетом величины уменьшения фрикционной тормозной силы вследствие такого изменения температуры масла во фрикционных тормозах 8a-8d. Температурный датчик может располагаться около фрикционных тормозов 8a-8d, и дополнительный тормозной крутящий момент может изменяться в соответствии со значением определения температурного датчика.
[0059] Здесь следует отметить, что больший дополнительный тормозной крутящий момент продлевает время, требуемое для того, чтобы понижать давление масла фрикционных тормозов 8a-8d, чтобы начинать приведение в движение электрического транспортного средства 100. Чтобы не допускать этого, дополнительный тормозной крутящий момент задается таким образом, что он не превышает верхнее предельное значение фрикционного момента, которое обеспечивает быстрое трогание с места электрического транспортного средства 100.
[0060] Таким образом, целевой останавливающий крутящий момент прибавляется в соответствии с оцененным значением Td* градиентного крутящего момента, за счет чего контроллер мотора надежно останавливает электрическое транспортное средство 100 таким образом, чтобы не создавать помехи плавному троганию с места электрического транспортного средства 100.
[0061] Чтобы останавливать электрическое транспортное средство 100, фрикционные тормоза 8a-8d должны быстро предоставлять фрикционную тормозную силу на колеса. С этой целью, тормозной контроллер 10 задает начальный фрикционный момент, соответствующий давлению масла, которое должно подаваться сначала во фрикционные тормоза 8a-8d. Такой начальный фрикционный момент, например, может определяться заранее на основе результата моделирования и экспериментальных данных.
[0062] Тормозной контроллер 10 настоящего варианта осуществления задает фактическое значение рекуперативного тормозного крутящего момента, сформированного в моторе 4, в качестве начального фрикционного момента. Более конкретно, контроллер 2 мотора оценивает рекуперативный крутящий момент мотора 4 на основе трехфазных переменных токов iu, iv и iw и выводит оцененный крутящий момент в тормозной контроллер 10. Тормозной контроллер 10 получает оцененное значение рекуперативного крутящего момента в качестве начального фрикционного момента.
[0063] После получения начального фрикционного момента, тормозной контроллер 10 увеличивает давление масла, подаваемого в каждый из фрикционных тормозов 8a-8d таким образом, что фрикционный момент, сформированный в каждом колесе, достигает начального фрикционного момента.
[0064] Затем тормозной контроллер 10 увеличивает давление масла, подаваемого в каждый из фрикционных тормозов 8a-8d, таким образом, что фрикционный момент, который фрикционные тормоза 8a-8d предоставляют на колеса, увеличивается с начального фрикционного момента до целевого останавливающего крутящего момента.
[0065] В то время, когда фрикционный момент, сформированный в каждом колесе, достигает целевого останавливающего крутящего момента из начального фрикционного момента, тормозной контроллер 10 настоящего варианта осуществления управляет степенью повышения давления масла, подаваемого во фрикционные тормоза 8a-8d, таким образом, чтобы подавлять продольную составляющую G электрического транспортного средства 100. Ниже описывается способ для управления степенью повышения давления фрикционных тормозов 8a-8d.
[0066] При повышении давления масла, подаваемого во фрикционные тормоза 8a-8d, тормозной контроллер 10 вычисляет значение Tm* команды управления крутящим моментом мотора таким образом, что рекуперативная тормозная сила мотора 4 постепенно снижается. В одном примере, тормозной контроллер 10 вычисляет значение Tm* команды управления крутящим моментом мотора в соответствии с предварительно определенной картой или арифметическим уравнением. Тормозной контроллер 10 затем выводит вычисленное значение Tm* команды управления крутящим моментом мотора в качестве запрашиваемого значения RBr величины рекуперативного торможения в контроллер 2 мотора.
[0067] Когда контроллер 2 мотора определяет то, что электрическое транспортное средство 100 не находится в момент времени непосредственно перед остановкой, контроллер 2 мотора затем выполняет обработку для управления демпфированием вибрации на этапе S206.
[0068] Более конкретно, контроллер 2 мотора выполняет обработку для управления демпфированием вибрации для значения Tm* команды управления крутящим моментом мотора на основе значения Tm* команды управления крутящим моментом мотора, вычисленного на этапе S204, и частоты ωm вращения мотора. Результирующее значение Tm* команды управления крутящим моментом мотора обеспечивает подавление вибрации системы передачи крутящего момента, к примеру, крутильной вибрации ведущего вала 6, без ухудшения отклика крутящего момента ведущего вала в электрическом транспортном средстве 100. Ниже описываются подробности обработки для управления демпфированием вибрации.
[0069] На этапе S207, контроллер 2 мотора выполняет обработку вычисления значений команд управления током.
[0070] Контроллер 2 мотора вычисляет целевое значение тока d-q-оси на основе значения Tm* команды управления крутящим моментом мотора, вычисленного на этапе S205, или значения Tm* команды управления крутящим моментом мотора, выводимого из тормозного контроллера 10 на этапе S204.
[0071] Более конкретно, контроллер 2 мотора получает целевое значение id* тока d-оси и целевое значение iq* тока q-оси на основе значения Tm* команды управления крутящим моментом мотора, а также частоты ωm вращения мотора и значения Vdc постоянного напряжения.
[0072] Например, контроллер 2 мотора имеет таблицу токов, записанную заранее. Таблица токов указывает взаимосвязь целевого значения id* тока d-оси и целевого значения iq* тока q-оси со значением Tm* команды управления крутящим моментом мотора, частотой ωm вращения мотора и значением Vdc постоянного напряжения. При получении значения Tm* команды управления крутящим моментом мотора, частоты ωm вращения мотора и значения Vdc постоянного напряжения, контроллер 2 мотора обращается к таблице токов, чтобы получать целевое значение id* тока d-оси и целевое значение iq* тока q-оси.
[0073] На этапе S208, контроллер 2 мотора выполняет обработку управления по току, чтобы управлять операцией переключения инвертора 3 таким образом, что ток id d-оси и ток iq q-оси совпадают (сходятся) с целевым значением id* тока d-оси и целевым значением iq* тока q-оси, полученными на этапе S206, соответственно.
[0074] Более конкретно, контроллер 2 мотора оценивает ток id d-оси и ток iq q-оси, подаваемые в мотор 4, на основе трехфазных переменных токов iu, iv и iw и фазы α вращения мотора 4, вводимых на этапе S201. Затем контроллер 2 мотора вычисляет значение vd* команды управления напряжением d-оси из отклонения между током id d-оси и целевым значением id* тока d-оси и значение vq* команды управления напряжением q-оси из отклонения между оцененным током iq q-оси и целевым значением iq* тока q-оси.
[0075] Затем контроллер 2 мотора получает значения vu*, vv* и vw* команд управления трехфазным переменным напряжением из значения vd* команды управления напряжением d-оси, значений vq* команд управления напряжением q-оси и фазы α вращения мотора 4. Затем контроллер 2 мотора формирует PWM-сигналы tu (%), tv (%) и tw (%) из полученных значений vu*, vv* и vw* команд управления трехфазным переменным напряжением и значения Vdc постоянного напряжения и подает сформированные PWM-сигналы tu, tv и tw в инвертор 3.
[0076] Переключающие элементы в инверторе 3 включаются и выключаются в соответствии с PWM-сигналами tu, tv и tw, и в силу этого мотор 4 вращательно приводится в действие таким образом, что крутящий момент, сформированный в моторе 4, сходится к значению Tm* команды управления крутящим моментом мотора.
[0077] Далее описывается конфигурация контроллера 2 мотора настоящего варианта осуществления.
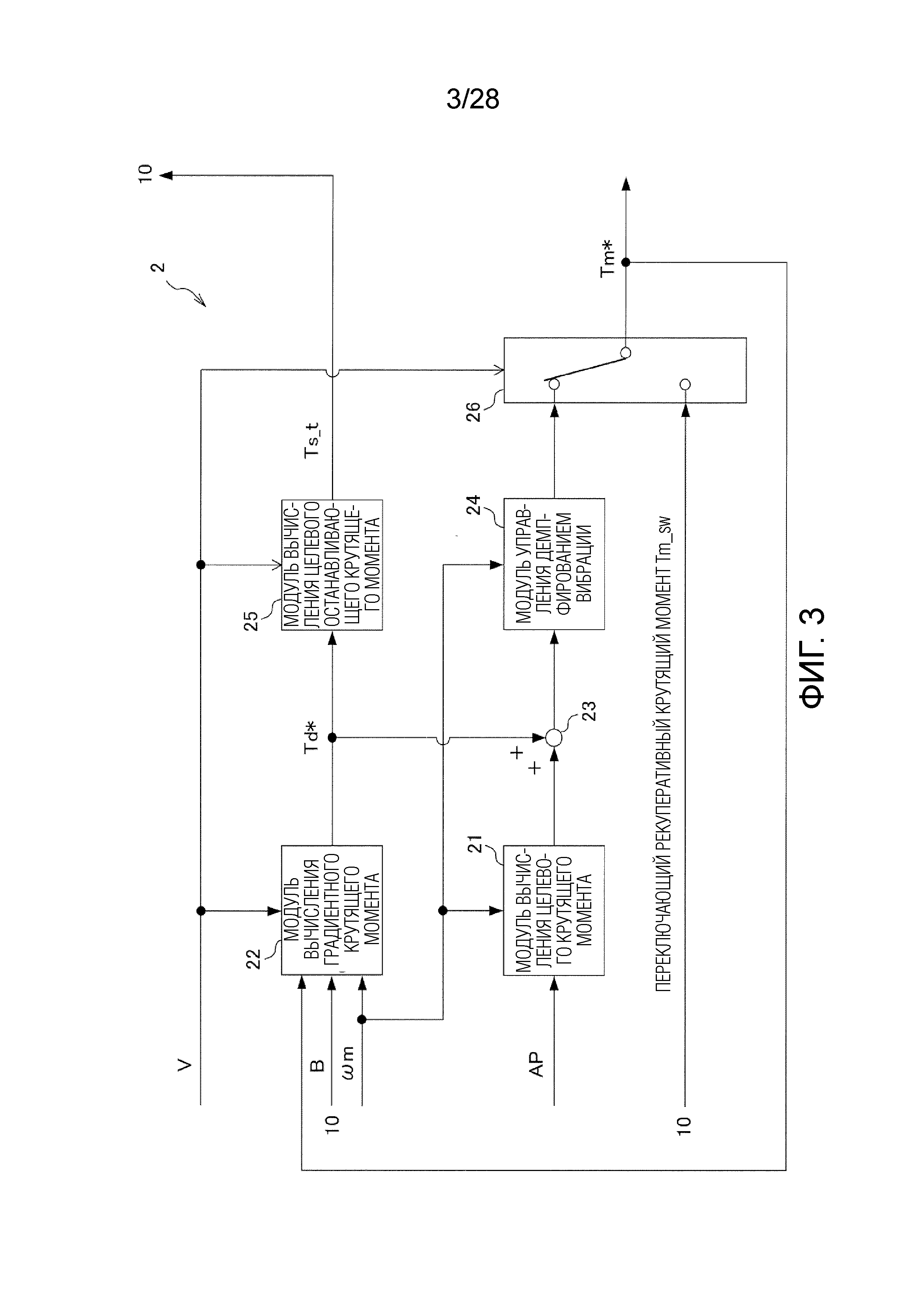
[0078] Фиг. 3 является блок-схемой, показывающей пример функциональной конфигурации контроллера 2 мотора настоящего варианта осуществления.
[0079] Контроллер 2 мотора включает в себя модуль 21 вычисления целевого крутящего момента, модуль 22 вычисления градиентного крутящего момента, модуль 23 вычисления командного крутящего момента, модуль 24 управления демпфированием вибрации, модуль 25 вычисления целевого останавливающего крутящего момента и модуль 26 переключения управления остановкой.
[0080] Модуль 21 вычисления целевого крутящего момента выполняет обработку вычисления значений целевого крутящего момента, описанную на этапе S202 по фиг. 2. Как указано выше, модуль 21 вычисления целевого крутящего момента получает позицию AP акселератора и частоту ωm вращения мотора и затем обращается к карте, показанной на фиг. 4, чтобы вычислять значение Tm_t целевого крутящего момента в ассоциации с полученными параметрами.
[0081] Модуль 22 вычисления градиентного крутящего момента выполняет обработку оценки градиентного крутящего момента, описанную на этапе S203 по фиг. 2. Как указано выше, модуль 22 вычисления градиентного крутящего момента вычисляет оцененное значение Td* градиентного крутящего момента на основе значения Tm* команды управления крутящим моментом мотора, оцененного значения B величины фрикционного торможения, частоты ωm вращения мотора и скорости V транспортного средства. Ниже описывается пример конфигурации модуля 22 вычисления градиентного крутящего момента со ссылкой на фиг. 6.
[0082] Модуль 23 вычисления командного крутящего момента вычисляет значение Tm* команды управления крутящим моментом мотора на основе оцененного значения Td* градиентного крутящего момента и значения Tm_t целевого крутящего момента. Модуль 23 вычисления командного крутящего момента настоящего варианта осуществления вычисляет значение Tm* команды управления крутящим моментом мотора посредством суммирования оцененного значения Td* градиентного крутящего момента со значением Tm_t целевого крутящего момента.
[0083] Модуль 23 вычисления командного крутящего момента может корректировать оцененное значение Td* градиентного крутящего момента на основе того, представляет дорога собой дорогу, идущую в подъем, или дорогу, идущую под спуск, и может суммировать скорректированное оцененное значение Td* градиентного крутящего момента со значением Tm_t целевого крутящего момента. Это уменьшает некомфортное ощущение водителя, когда водитель останавливает транспортное средство на поверхности дороги с уклоном.
[0084] Как описано на этапе S206 по фиг. 2, модуль 24 управления демпфированием вибрации выполняет обработку для управления демпфированием вибрации на основе значения Tm* команды управления крутящим моментом мотора и частоты ωm вращения мотора. Ниже описывается пример конфигурации модуля 24 управления демпфированием вибрации со ссылкой на фиг. 7.
[0085] Как описано на этапе S205 по фиг. 2, модуль 25 вычисления целевого останавливающего крутящего момента вычисляет целевой останавливающий крутящий момент Ts_t на основе оцененного значения Td* градиентного крутящего момента. Ниже описывается пример конфигурации модуля 25 вычисления целевого останавливающего крутящего момента со ссылкой на фиг. 8.
[0086] Как описано на этапе S205 по фиг. 2, модуль 26 переключения управления остановкой задает переключающий рекуперативный крутящий момент Tm_sw, который используется для того, чтобы переключаться с рекуперативного крутящего момента на фрикционный момент, когда электрическое транспортное средство 100 останавливается, в качестве значения Tm* команды управления крутящим моментом мотора. Модуль 26 переключения управления остановкой получает значение Tm* команды управления крутящим моментом мотора, указывающее переключающий рекуперативный крутящий момент Tm_sw, в качестве запрашиваемого значения RBr величины рекуперативного торможения из тормозного контроллера 10.
[0087] Когда скорость V транспортного средства меньше предварительно определенного порогового значения для остановки транспортного средства, модуль 26 переключения управления остановкой настоящего варианта осуществления изменяет значение Tm* команды управления крутящим моментом мотора с выходного значения модуля 24 управления демпфированием вибрации на переключающий рекуперативный крутящий момент Tm_sw.
[0088] Обработка управления остановкой
Далее описывается способ извлечения оцененного значения Td* градиентного крутящего момента на этапе S203, со ссылкой на чертежи.
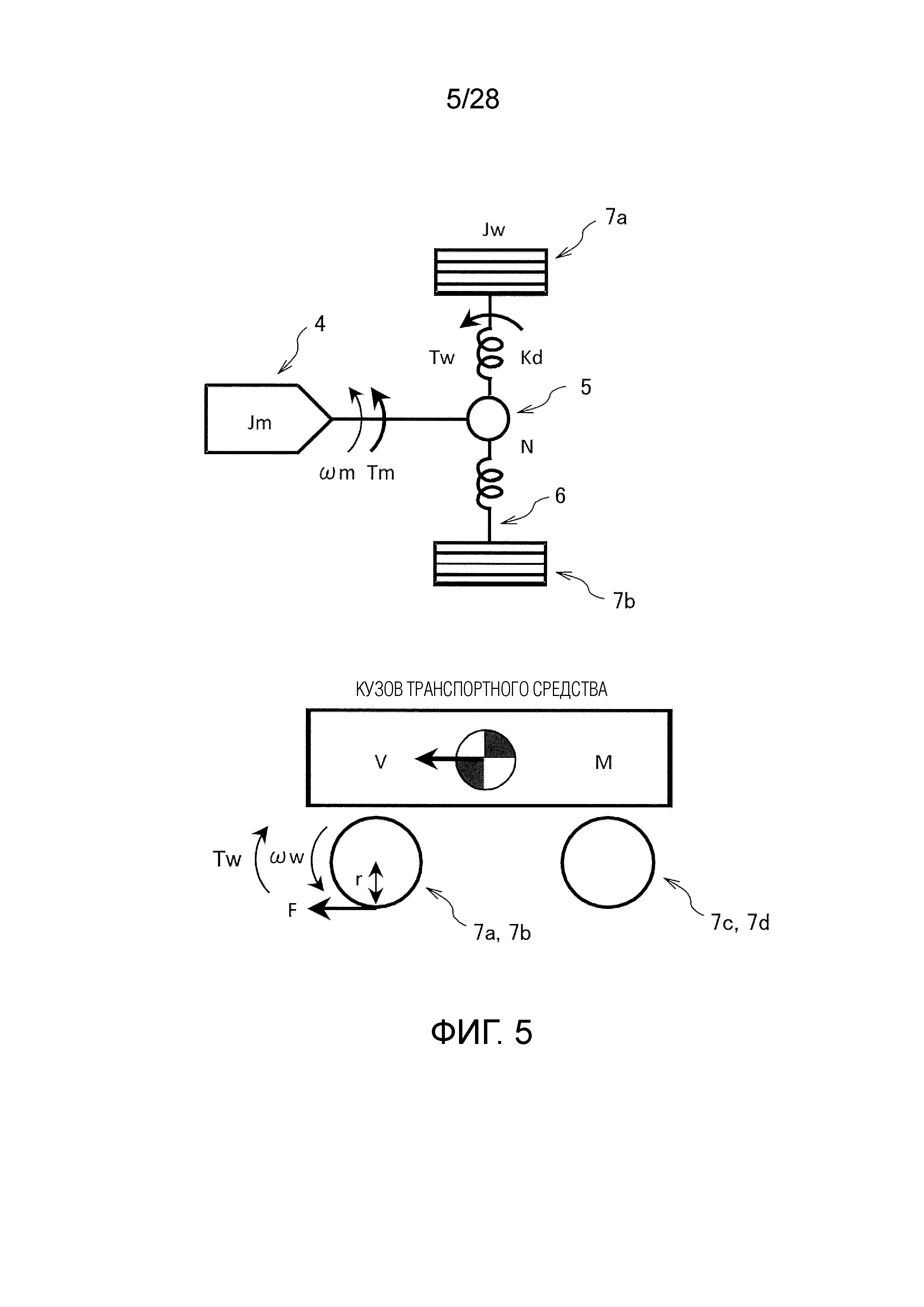
[0089] Фиг. 5 описывает передаточную характеристику GP(s) из крутящего момента Tm мотора, который представляет собой крутящий момент, сформированный в моторе 4, в частоту ωm вращения мотора.
[0090] Фиг. 5 показывает модель транспортного средства системы передачи движущей силы электрического транспортного средства 100. Параметры, используемые для этой модели транспортного средства, являются следующими.
[0091] Jm - инерция мотора 4
Jw - инерция ведущих колес
M - вес электрического транспортного средства 100
Kd - крутильная жесткость приводной системы
Kt - коэффициент относительно трения между шинами и поверхностью дороги
N - полное передаточное отношение
r - радиус нагрузки шин
ωm - частота вращения мотора
Tm - крутящий момент мотора
Tw - крутящий момент ведущих колес
F - сила, прикладываемая к электрическому транспортному средству 100
V - скорость электрического транспортного средства 100
Ωw - угловая скорость ведущих колес
Tf - величина фрикционного торможения (крутящий момент преобразования мотор-вал) (≥0)
Следующие уравнения движения могут извлекаться из модели транспортного средства, показанной на фиг. 5.
[0092] уравнение 1

[0093] уравнение 2

[0094] уравнение 3

[0095] уравнение 4

[0096] уравнение 5

[0097] Следует отметить, что звездочка (*), присоединяемая к правому верхнему углу символа в уравнениях (1)-(3), указывает производную по времени.
[0098] Следующее уравнение (6) представляет передаточную характеристику GP(s) из крутящего момента Tm мотора, вводимого в электрическое транспортное средство 100, в частоту ωm вращения мотора, которые получаются на основе уравнений (1)-(5) движения. В нижеприведенном описании, передаточные характеристики GP(s), извлекаемые из вышеуказанной модели транспортного средства, упоминаются как модель Gp(s) транспортного средства.
[0099] уравнение 6

[0100] Каждый параметр в уравнении (6) выражается посредством следующих уравнений (7).
[0101] уравнение 7
[0102] Исследования полюсов и нулевой точки передаточной функции, показанной в уравнении (6), обеспечивают аппроксимацию в передаточную функцию следующего уравнения (8), и один полюс и одна нулевая точка указывают значения, чрезвычайно близкие друг к другу. Это означает то, что α и β следующего уравнения (8) указывают значения, чрезвычайно близкие друг к другу.
[0103] уравнение 8

[0104] Отмена нулей и полюсов, чтобы аппроксимировать то, что α=β в уравнении (8), в силу этого обеспечивает возможность Gp(s) составлять передаточную характеристику (второго порядка)/(третьего порядка), как показано в следующем уравнении (9).
[0105] уравнение 9

[0106] Для комбинированного использования обработки для управления демпфированием вибрации на этапе S205, алгоритм управления демпфированием вибрации может применяться таким образом, что модель Gp(s) транспортного средства может рассматриваться как модель Gr(s) транспортного средства, указывающая скорость отклика транспортного средства, когда обработка для управления демпфированием вибрации выполняется, как показано в следующем уравнении (10).
[0107] уравнение 10

[0108] Здесь следует отметить, что обработка для управления демпфированием вибрации может представлять собой обработку, описанную в JP 2001-45613, или может представлять собой обработку, описанную в JP 2002-152916.
[0109] Далее описываются подробности обработки управления остановкой, выполняемой на этапе S205, со ссылкой на фиг. 6-9.
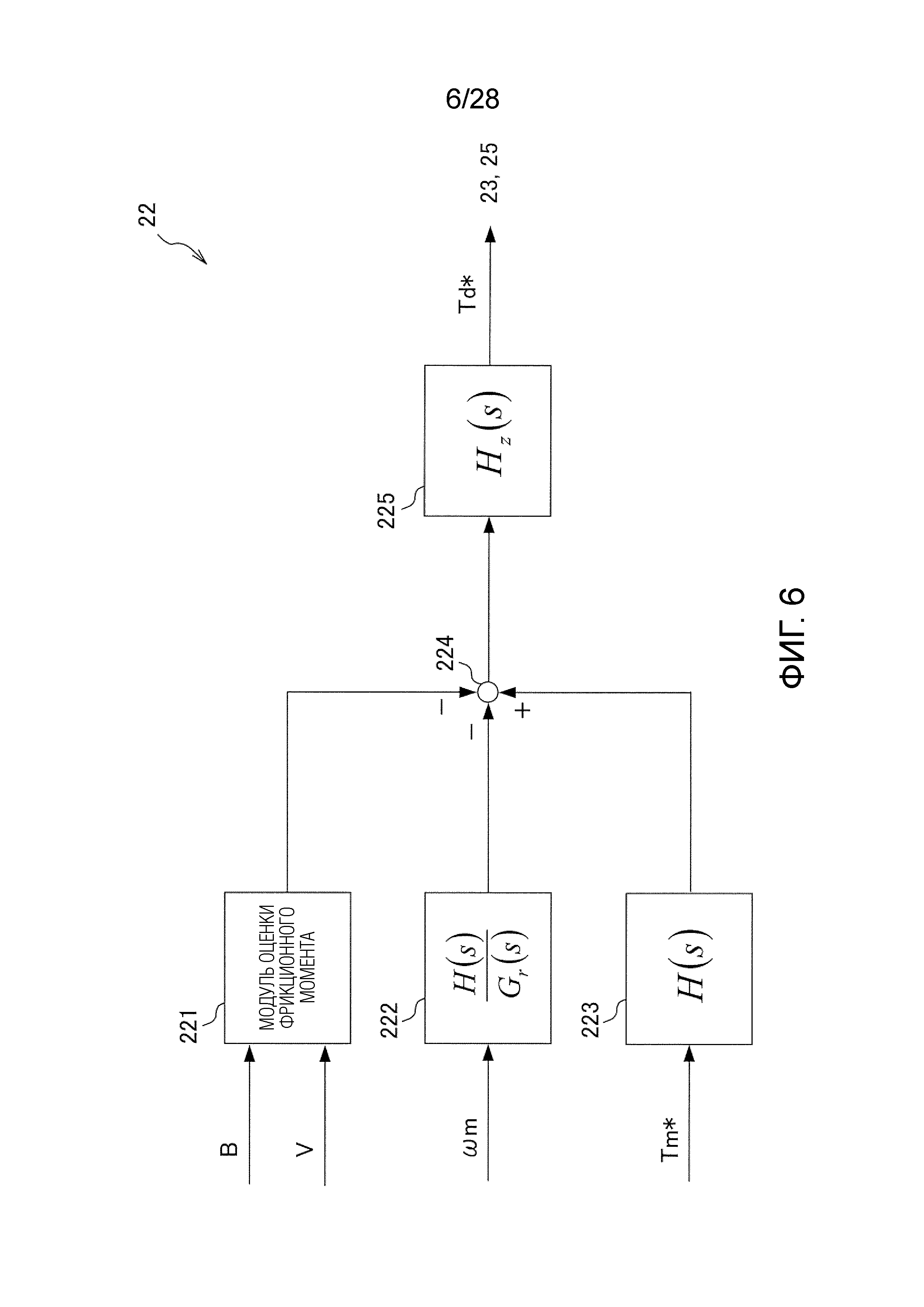
[0110] Фиг. 6 является блок-схемой, показывающей функциональную конфигурацию модуля 22 вычисления градиентного крутящего момента, чтобы вычислять оцененное значение Td* градиентного крутящего момента.
[0111] Модуль 22 вычисления градиентного крутящего момента включает в себя модуль 221 оценки фрикционного момента, блок 222 управления, блок 223 управления, модуль 224 вычисления и блок 225 управления.
[0112] Модуль 221 оценки фрикционного момента вычисляет оцененное значение фрикционного момента на основе оцененного значения B величины фрикционного торможения и скорости V транспортного средства. Модуль 221 оценки фрикционного момента рассматривает операцию умножения, чтобы преобразовывать оцененное значение B величины фрикционного торможения в крутящий момент вала мотора и скорость отклика из значения, определенного посредством датчика 14 давления текучей среды, в фактическую тормозную силу, чтобы вычислять оцененное значение B величины фрикционного торможения.
[0113] Блок 222 управления имеет функцию в качестве фильтра, имеющего передаточную характеристику H(s)/Gr(s), и выполняет фильтрацию для частоты ωm вращения мотора таким образом, чтобы вычислять оцененное значение первого крутящего момента мотора. Это оцененное значение первого крутящего момента мотора представляет собой текущий крутящий момент мотора, который оценивается из частоты ωm вращения мотора.
[0114] Передаточная характеристика H(s), как указано выше, представляет собой фильтр нижних частот, имеющий такую передаточную характеристику, что разность между степенью знаменателя и степенью числителя равна или больше разности между степенью знаменателя и степенью числителя модели Gr(s) транспортного средства. Эта Gr(s) представляет собой передаточную характеристику, показанную в уравнении (10), из крутящего момента Tm мотора в частоту ωm вращения мотора, когда обработка для управления демпфированием вибрации выполняется.
[0115] Блок 223 управления имеет функцию в качестве фильтра нижних частот, имеющего передаточную характеристику H(s), и выполняет фильтрацию для значения Tm* команды управления крутящим моментом мотора таким образом, чтобы вычислять оцененное значение второго крутящего момента мотора. Это оцененное значение второго крутящего момента мотора оценивается из значения Tm* команды управления крутящим моментом мотора.
[0116] Модуль 224 вычисления вычисляет отклонение крутящего момента посредством вычитания оцененного значения первого крутящего момента мотора из оцененного значения второго крутящего момента мотора и вычитает оцененное значение фрикционного момента из такого отклонения. Затем модуль 224 вычисления выводит полученное значение в блок 225 управления. Таким образом, чтобы получать крутящий момент мотора, требуемый для того, чтобы подавлять силу, действующую на электрическое транспортное средство 100 вследствие градиента поверхности дороги, модуль 224 вычисления вычисляет разность фактического значения относительно значения команды управления крутящего момента мотора. С этой целью, модуль 224 вычисления удаляет компонент фрикционного момента, включенный в разность.
[0117] Блок 225 управления представляет собой фильтр, имеющий передаточную характеристику Hz(s), и выполняет фильтрацию для вывода из модуля 224 вычисления таким образом, чтобы вычислять оцененное значение Td* градиентного крутящего момента.
[0118] Далее описывается передаточная характеристика Hz(s). Модификация уравнения (10), как указано выше, приводит к следующему уравнению (11). В уравнении (11) ζz, ωz и ωp выражаются посредством уравнения (12).
[0119] уравнение 11

[0120] уравнение 12
[0121] Из вышеозначенного, передаточная характеристика Hz(s) представляется посредством следующего уравнения (13).
[0122] уравнение 13

[0123] Оцененное значение Td* градиентного крутящего момента, вычисляемое так, как указано выше, оценивается посредством модуля наблюдения возмущений, как показано на фиг. 11, и представляет собой параметр, указывающий возмущения, действующие на транспортное средство.
[0124] Возмущения, действующие на транспортное средство, могут включать в себя сопротивление воздуха, ошибку моделирования, вызываемую посредством варьирования веса транспортного средства вследствие числа пассажиров и величины нагрузки, сопротивление качения шин и сопротивление вследствие градиента поверхности дороги. Из них, доминирующий фактор возмущений непосредственно перед остановкой транспортного средства либо при начальном трогании с места представляет собой сопротивление вследствие градиента. Модуль 22 вычисления градиентного крутящего момента настоящего варианта осуществления совместно оценивает факторы возмущений, описанные выше, поскольку этот модуль вычисляет оцененное значение Td* градиентного крутящего момента на основе значения Tm* команды управления крутящим моментом мотора, частоты ωm вращения мотора и модели Gr(s) транспортного средства, полученной посредством выполнения управления демпфированием вибрации. Это позволяет добиваться плавной остановки транспортного средства после замедления при любом состоянии движения.
[0125] Обработка для управления демпфированием вибрации
Далее описывается обработка для управления демпфированием вибрации, выполняемая посредством модуля 24 управления демпфированием вибрации на этапе S206 по фиг. 2.
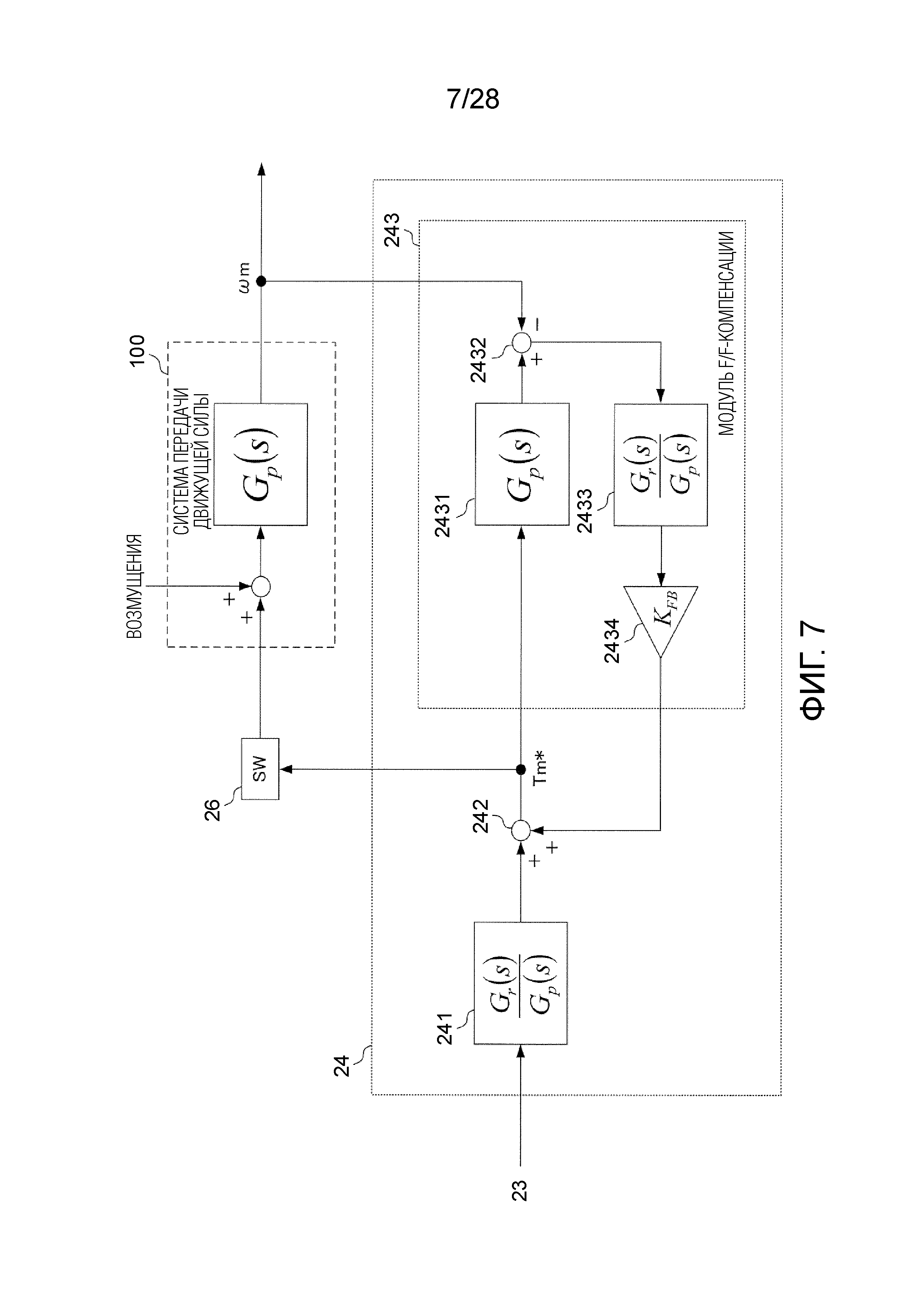
[0126] Фиг. 7 является блок-схемой, показывающей один пример функциональной конфигурации модуля 24 управления демпфированием вибрации настоящего варианта осуществления.
[0127] Модуль 24 управления демпфированием вибрации включает в себя модуль 241 F/F-компенсации, сумматор 242 и модуль 243 F/B-компенсации.
[0128] Модуль 241 F/F-компенсации функционирует в качестве фильтра, имеющего передаточную характеристику Gr(s)/Gp(s). Передаточная характеристика Gr(s)/Gp(s) состоит из модели Gr(s) транспортного средства, показанной в вышеуказанном уравнении (10), и обратной системы модели Gp(s) транспортного средства, показанной в уравнении (6).
[0129] Модуль 241 F/F-компенсации выполняет фильтрацию для значения Tm* команды управления крутящим моментом мотора таким образом, чтобы выполнять обработку для управления демпфированием вибрации посредством компенсации с прямой связью. Модуль 241 F/F-компенсации затем выводит значение команды управления крутящим моментом мотора после обработки для управления демпфированием вибрации посредством компенсации с прямой связью в сумматор 242.
[0130] Здесь следует отметить, что обработка для управления демпфированием вибрации в модуле 241 F/F-компенсации может представлять собой обработку, описанную в JP 2001-45613, или может представлять собой обработку, описанную в JP 2002-152916.
[0131] Сумматор 242 суммирует выходное значение из модуля 243 F/B-компенсации с выходным значением из модуля 241 F/F-компенсации таким образом, чтобы вычислять новое значение Tm* команды управления крутящим моментом мотора. Сумматор 242 затем выводит вычисленное значение Tm* команды управления крутящим моментом мотора в модуль 26 переключения управления остановкой и модуль 243 F/B-компенсации.
[0132] Модуль 243 F/B-компенсации представляет собой фильтр, используемый для управления с обратной связью. Модуль 243 F/B-компенсации включает в себя блок 2431 управления, вычитатель 2432, блок 2433 управления и модуль 2434 компенсации усиления.
[0133] Блок 2431 управления функционирует в качестве фильтра, имеющего передаточную характеристику, которая представляет собой модель Gp(s) транспортного средства, как указано выше. Блок 2431 управления выполняет фильтрацию для значения Tm* команды управления крутящим моментом мотора, которое представляет собой выходное значение из сумматора 242, чтобы выводить оцененное значение частоты вращения мотора.
[0134] Вычитатель 2432 вычисляет отклонение посредством вычитания частоты ωm вращения мотора из оцененного значения блока 2431 управления и выводит вычисленное отклонение в блок 2433 управления.
[0135] Блок 2433 управления функционирует в качестве фильтра, имеющего передаточную характеристику H(s)/Gp(s), которая состоит из фильтра нижних частот, имеющего передаточную характеристику H(s), и обратной системы модели Gp(s) транспортного средства. Блок 2433 управления выполняет фильтрацию для отклонения из вычитателя 2432, чтобы вычислять компенсационный крутящий F/B-момент, и выводит компенсационный крутящий F/B-момент в модуль 2434 компенсации усиления.
[0136] Модуль 2434 компенсации усиления представляет собой фильтр, чтобы умножать компенсационный крутящий F/B-момент на усиление KFB. Усиление KFB может регулироваться, чтобы поддерживать стабильность модуля 243 F/B-компенсации. Модуль 2434 компенсации усиления затем выводит отрегулированный по усилению компенсационный крутящий F/B-момент в сумматор 242.
[0137] Сумматор 242 суммирует компенсационный крутящий F/B-момент и значение Tm* команды управления крутящим моментом мотора, подвергнутое обработке для управления демпфированием вибрации посредством модуля 241 F/F-компенсации. Таким образом, значение Tm* команды управления крутящим моментом мотора вычисляется таким образом, чтобы подавлять вибрацию системы передачи движущей силы электрического транспортного средства 100.
[0138] Здесь следует отметить, что обработка для управления демпфированием вибрации, показанная на фиг. 7, представляет собой один пример, который может представлять собой обработку, описанную в JP 2003-9566, или может представлять собой обработку, описанную в JP 2010-288332.
[0139] Далее описывается способ вычисления целевого останавливающего крутящего момента, вычисленного посредством целевого модуля вычисления останавливающего крутящего момента 25 на этапе S205 по фиг. 2.
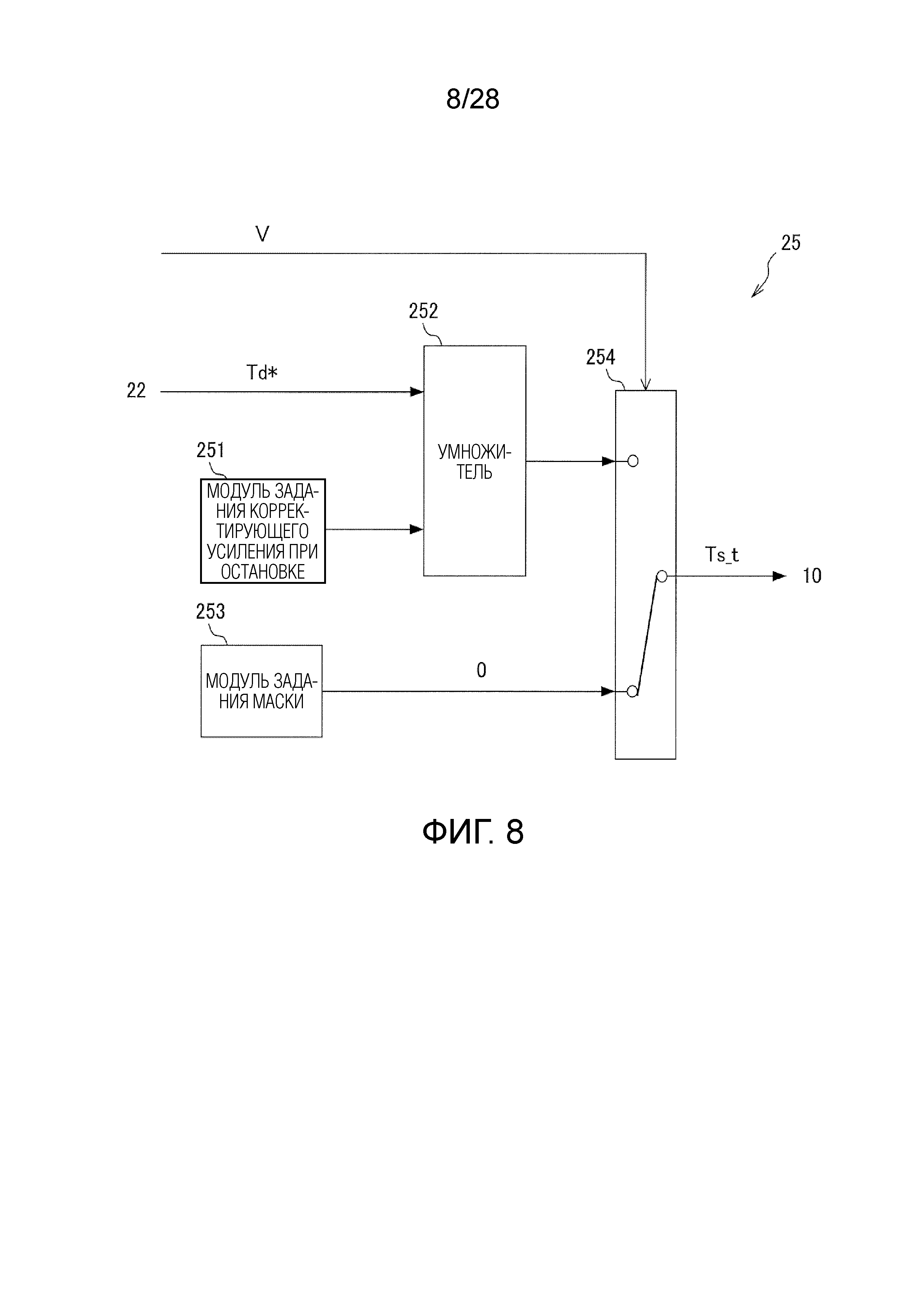
[0140] Фиг. 8 является блок-схемой, показывающей один пример функциональной конфигурации модуля 25 вычисления целевого останавливающего крутящего момента. Модуль 25 вычисления целевого останавливающего крутящего момента включает в себя модуль 251 задания корректирующего усиления при остановке, умножитель 252, модуль 253 задания маски и модуль 254 вывода целевого останавливающего крутящего момента.
[0141] Модуль 251 задания корректирующего усиления при остановке выводит корректирующее усиление при остановке, требуемое для того, чтобы останавливать электрическое транспортное средство 100 независимо от градиента поверхности дороги, в умножитель 252. Как указано выше на этапе S205, корректирующее усиление при остановке задается заранее таким образом, чтобы обеспечивать плавное трогание с места электрического транспортного средства 100 и надежно останавливать электрическое транспортное средство 100, например, с учетом температурной зависимости фрикционной тормозной силы во фрикционных тормозах 8a-8d. Корректирующее усиление при остановке задается равным значению, большему 1,0.
[0142] Умножитель 252 умножает оцененное значение Td* градиентного крутящего момента из модуля 22 вычисления градиентного крутящего момента на корректирующее усиление при остановке и выводит произведение в модуль 254 вывода целевого останавливающего крутящего момента.
[0143] Модуль 253 задания маски выводит 0 в модуль 254 вывода целевого останавливающего крутящего момента для маскирования целевого останавливающего крутящего момента.
[0144] Модуль 254 вывода целевого останавливающего крутящего момента определяет то, останавливается или нет электрическое транспортное средство 100. Когда электрическое транспортное средство 100 останавливается, модуль 254 вывода целевого останавливающего крутящего момента изменяет целевой останавливающий крутящий момент Ts_t, который указывает целевое значение фрикционного момента, с выходного значения модуля 253 задания маски на выходное значение умножителя 252.
[0145] Когда скорость V транспортного средства меньше порогового значения для остановки, модуля 254 вывода целевого останавливающего крутящего момента настоящего варианта осуществления умножает оцененное значение Td* градиентного крутящего момента на корректирующее усиление при остановке и выводит произведение в тормозной контроллер 10 в качестве целевого останавливающего крутящего момента Ts_t. Когда скорость V транспортного средства составляет пороговое значение для остановки или больше, модуль 254 вывода целевого останавливающего крутящего момента выводит 0 в тормозной контроллер 10 в качестве целевого останавливающего крутящего момента Ts_t.
[0146] Таким образом, когда остановка электрического транспортного средства 100 ожидается, модуль 25 вычисления целевого останавливающего крутящего момента предоставляет целевой останавливающий крутящий момент Ts_t в тормозной контроллер 10 таким образом, что фрикционная тормозная сила надежно останавливает электрическое транспортное средство 100 независимо от градиента поверхности дороги.
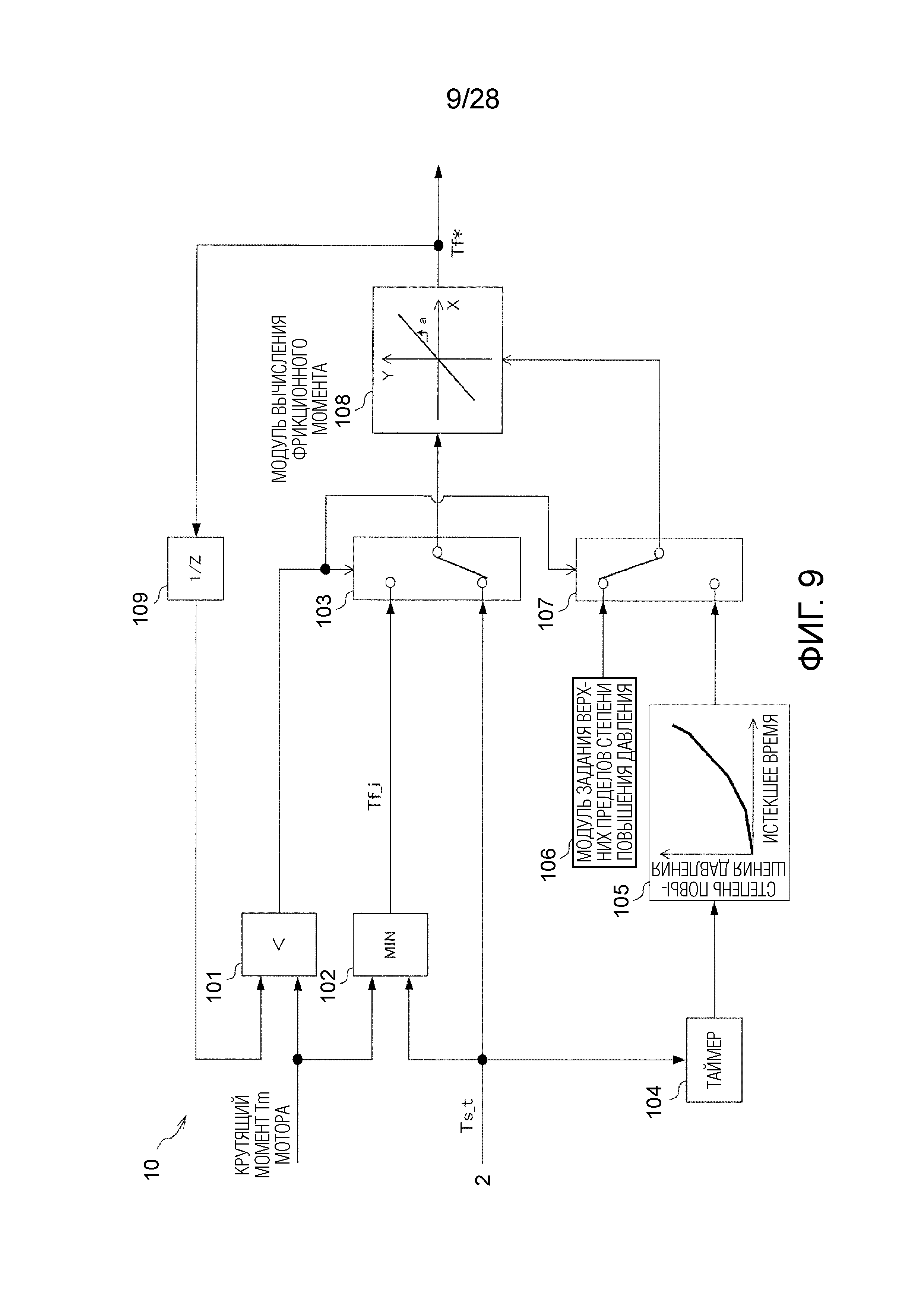
[0147] Фиг. 9 является блок-схемой, показывающей один пример функциональной конфигурации тормозного контроллера 10 настоящего варианта осуществления.
[0148] Тормозной контроллер 10 включает в себя модуль 101 определения переключения, переключатель 102 выбора минимума, модуль 103 переключения крутящего момента, таймер 104, модуль 105 вычисления степени повышения давления, модуль 106 задания верхних пределов степени повышения давления, модуль 107 переключения степени повышения давления, модуль 108 вычисления фрикционного момента и модуль 109 задания предыдущих значений.
[0149] Модуль 101 определения переключения определяет то, достигает или нет предыдущее значение Tf-1* фрикционного момента крутящего момента Tm мотора. Модуль 101 определения переключения принимает, в качестве ввода, крутящий момент Tm мотора в качестве начального фрикционного момента Tf_i фрикционных тормозов 8a-8d. Крутящий момент Tm мотора, например, вычисляется из трехфазных переменных токов iu, iv и iw посредством типичного способа.
[0150] Когда модуль 101 определения переключения определяет то, что предыдущее значение Tf-1* фрикционного момента не достигает крутящего момента Tm мотора, модуль 101 определения переключения выводит начальный задающий сигнал фрикционных тормозов 8a-8d в модуль 103 переключения крутящего момента и модуль 107 переключения степени повышения давления.
[0151] Когда модуль 101 определения переключения определяет то, что предыдущее значение Tf-1* фрикционного момента достигает крутящего момента Tm мотора, модуль 101 определения переключения выводит сигнал управления повышением давления фрикционных тормозов 8a-8d в модуль 103 переключения крутящего момента и модуль 107 переключения степени повышения давления.
[0152] Переключатель 102 выбора минимума выводит меньшее значение между крутящим моментом Tm мотора и целевым останавливающим крутящим моментом Ts_t в модуль 103 переключения крутящего момента в качестве начального фрикционного момента Tf_i. Например, когда крутящий момент Tm мотора меньше целевого останавливающего крутящего момента Ts_t, переключатель 102 выбора минимума выводит крутящий момент Tm мотора в модуль 103 переключения крутящего момента в качестве начального фрикционного момента Tf_i.
[0153] Модуль 103 переключения крутящего момента изменяет тормозной крутящий момент, который должен выводиться в модуль 108 вычисления фрикционного момента, с начального фрикционного момента Tf_i на целевой останавливающий крутящий момент Ts_t в соответствии с сигналом, выводимым из модуля 101 определения переключения.
[0154] Более конкретно, при приеме начального задающего сигнала из модуля 101 определения переключения, модуль 103 переключения крутящего момента выводит начальный фрикционный момент Tf_i в модуль 108 вычисления фрикционного момента. При приеме сигнала управления повышением давления из модуля 101 определения переключения, модуль 103 переключения крутящего момента выводит целевой останавливающий крутящий момент Ts_t в модуль 108 вычисления фрикционного момента.
[0155] Таймер 104 определяет то, равен целевой останавливающий крутящий момент Ts_t или нет 0 (нулю). Когда целевой останавливающий крутящий момент Ts_t равен 0, таймер 104 задает значение счетчика равным 0. Когда целевой останавливающий крутящий момент Ts_t превышает 0, таймер 104 начинает подсчет и выводит подсчитанное значение в модуль 105 вычисления степени повышения давления. Таким образом, когда определяется то, что электрическое транспортное средство 100 останавливается, таймер 104 выводит подсчитанное значение, которое представляет собой истекшее время с момента определения остановки транспортного средства, в модуль 105 вычисления степени повышения давления.
[0156] Модуль 105 вычисления степени повышения давления вычисляет степень повышения давления в соответствии с предварительно определенной таблицей вычислений или арифметическим уравнением. Модуль 105 вычисления степени повышения давления вычисляет степень повышения давления фрикционных тормозов 8a-8d в соответствии с подсчитанным значением таймера 104. Модуль 105 вычисления степени повышения давления выводит вычисленную степень повышения давления в модуль 108 вычисления фрикционного момента.
[0157] Модуль 105 вычисления степени повышения давления настоящего варианта осуществления сохраняет таблицу степеней повышения давления заранее, причем таблица повышения давления показывает взаимосвязь между степенью повышения давления фрикционных тормозов 8a-8d и подсчитанным значением таймера 104. Таблица степеней повышения давления задает степень повышения давления таким образом, чтобы не вызывать у водителя некомфортное ощущение, когда электрическое транспортное средство 100 останавливается. Таблица степеней повышения давления настоящего варианта осуществления задает большую степень повышения давления фрикционных тормозов 8a-8d для большего подсчитанного значения таймера 104 таким образом, чтобы рисовать квадратичную кривую.
[0158] Модуль 106 задания верхних пределов степени повышения давления сохраняет верхнее предельное значение степени повышения давления для фрикционных тормозов 8a-8d заранее. Верхнее предельное значение степени повышения давления определяется с учетом конструкции фрикционных тормозов 8a-8d, например, которая может задаваться равным нескольким десяткам тысяч ньютонов (м/с). Модуль 106 задания верхних пределов степени повышения давления задает верхнее предельное значение степени повышения давления в модуле 107 переключения степени повышения давления.
[0159] Модуль 107 переключения степени повышения давления изменяет степень повышения давления, которая должна выводиться в модуль 108 вычисления фрикционного момента, в соответствии с сигналом из модуля 101 определения переключения.
[0160] Более конкретно, при приеме начального задающего сигнала из модуля 101 определения переключения, модуль 107 переключения степени повышения давления выводит верхнее предельное значение степени повышения давления в модуль 108 вычисления фрикционного момента. При приеме сигнала управления повышением давления из модуля 101 определения переключения, модуль 107 переключения степени повышения давления выводит степень повышения давления, вычисленную посредством модуля 105 вычисления степени повышения давления, в модуль 108 вычисления фрикционного момента.
[0161] Таким образом, когда предыдущее значение Tf-1* фрикционного момента достигает крутящего момента Tm мотора, модуль 107 переключения степени повышения давления задает степень повышения давления для модуля 108 вычисления фрикционного момента таким образом, что транспортное средство останавливается плавно во время увеличения с начального фрикционного момента Tf_i до целевого останавливающего крутящего момента Ts_t.
[0162] Модуль 108 вычисления фрикционного момента вычисляет значение Tf* команды управления фрикционным моментом, чтобы указывать силу трения, которая должна предоставляться в электрическое транспортное средство 100, при обращении к предварительно определенной таблице вычислений или арифметическому уравнению. Модуль 108 вычисления фрикционного момента вычисляет значение Tf* команды управления фрикционным моментом на основе значения степени повышения давления, выводимого из модуля 107 переключения степени повышения давления, и значения тормозного крутящего момента, выводимого из модуля 103 переключения крутящего момента.
[0163] Модуль 108 вычисления фрикционного момента настоящего варианта осуществления сохраняет таблицу фрикционных моментов заранее, причем таблица фрикционных моментов имеет ось X и ось Y, представляющие целевое значение фрикционного момента и значение команды управления фрикционным моментом, соответственно, и показывает взаимосвязь между целевым значением фрикционного момента и значением команды управления фрикционным моментом. В таблице фрикционных моментов, целевое значение фрикционного момента и значение команды управления фрикционным моментом имеют пропорциональную взаимосвязь, и уклон значения команды управления фрикционным моментом (Y) относительно целевого значения фрикционного момента (X) изменяется со степенью повышения давления из модуля 107 переключения степени повышения давления. В одном примере, уклон увеличивается с увеличением степени повышения давления.
[0164] При получении степени повышения давления из модуля 107 переключения степени повышения давления, модуль 108 вычисления фрикционного момента изменяет уклон таблицы фрикционных моментов в соответствии со степенью повышения давления. При получении тормозного крутящего момента из модуля 103 переключения крутящего момента в качестве целевого значения фрикционного момента, модуль 108 вычисления фрикционного момента обращается к измененной таблице фрикционных моментов и вычисляет значение команды управления в ассоциации с полученным целевым значением в качестве значения Tf* команды управления фрикционным моментом.
[0165] Модуль 108 вычисления фрикционного момента выводит вычисленное значение Tf* команды управления фрикционным моментом в блок управления, чтобы управлять давлением масла фрикционных тормозов 8a-8d, и в модуль 109 задания предыдущих значений.
[0166] Модуль 109 задания предыдущих значений получает значение Tf* команды управления фрикционным моментом из модуля 108 вычисления фрикционного момента и сохраняет его в качестве предыдущего значения до следующего периода управления. В следующий период управления, модуль 109 задания предыдущих значений выводит сохраненное значение команды управления фрикционным моментом в качестве предыдущего значения Tf-1* в модуль 101 определения переключения.
[0167] Таким образом, когда целевой останавливающий крутящий момент Ts_t превышает 0, тормозной контроллер 10 задает значение рекуперативного крутящего момента, фактически сформированного в моторе 4, в качестве начального фрикционного момента Tf_i. Затем тормозной контроллер 10 быстро увеличивает давление тормозного масла, которое должно подаваться во фрикционные тормоза 8a-8d, таким образом, что фрикционный момент достигает начального фрикционного момента Tf_i. После этого, в то время как фрикционный момент достигает целевого останавливающего крутящего момента Ts_t, заданного таким образом, что транспортное средство надежно останавливается даже на дороге с уклоном, тормозной контроллер 10 управляет степенью повышения давления тормозного масла таким образом, чтобы не вызывать некомфортное ощущение у водителя электрического транспортного средства 100.
[0168] Таким образом, когда электрическое транспортное средство 100 находится в момент времени непосредственно перед остановкой, тормозной контроллер 10 увеличивает давление тормозного масла заранее таким образом, чтобы точно предоставлять фрикционную тормозную силу в электрическое транспортное средство 100. После этого, тормозной контроллер 10 предоставляет фрикционную тормозную силу в электрическое транспортное средство 100 таким образом, что электрическое транспортное средство 100 надежно останавливается при регулировании степени повышения давления тормозного масла в соответствии с состоянием электрического транспортного средства 100. Это обеспечивает возможность тормозной силе, предоставленной в электрическое транспортное средство 100, корректно переключаться с рекуперативной тормозной силы на фрикционную тормозную силу таким образом, что электрическое транспортное средство 100 останавливается.
[0169] Далее описывается операция остановки электрического транспортного средства 100 настоящего варианта осуществления, со ссылкой на чертежи.
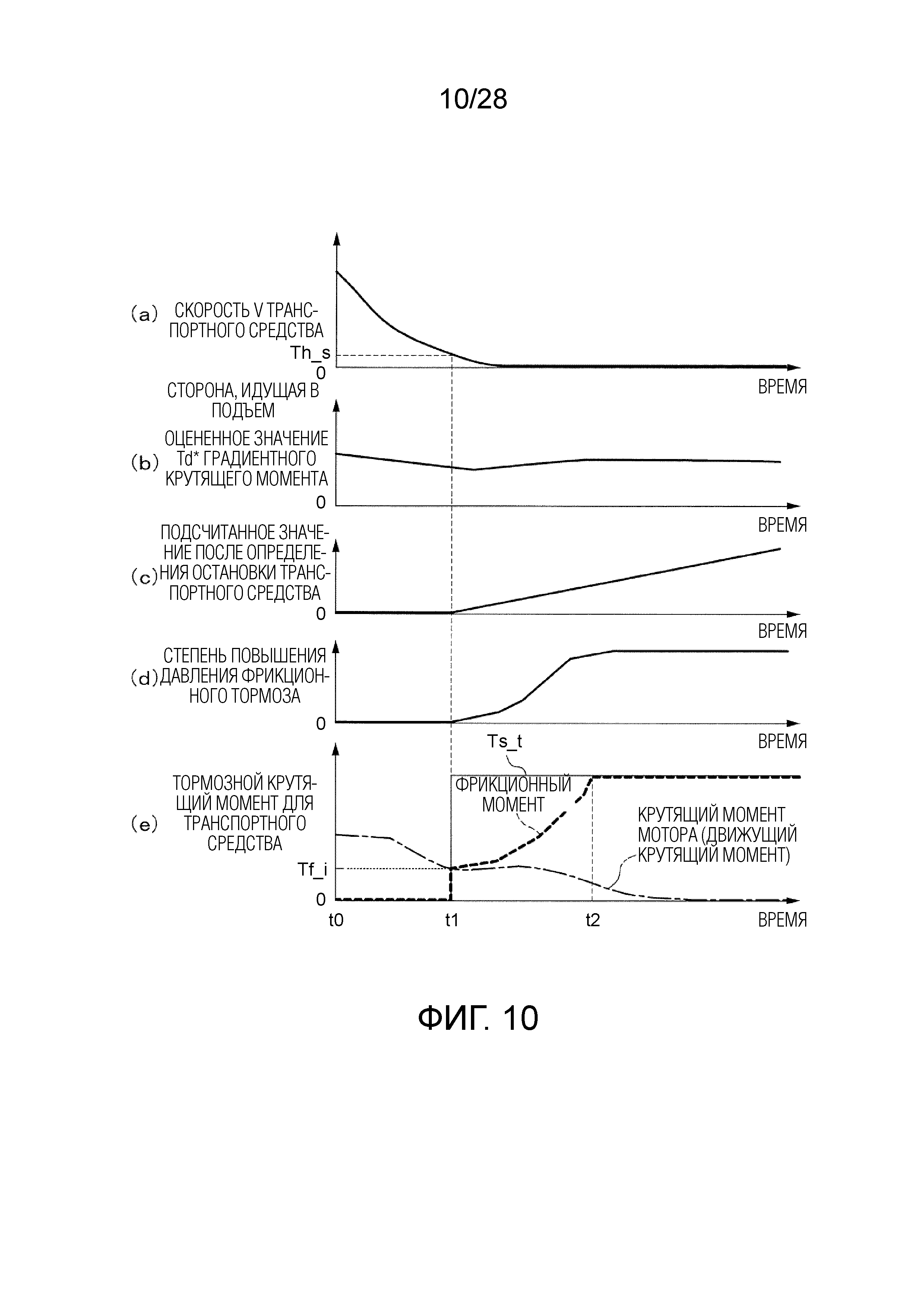
[0170] Фиг. 10 является временной диаграммой, показывающей один пример, когда электрическое транспортное средство 100 настоящего варианта осуществления останавливается.
[0171] Фиг. 10(a)-(e) показывает скорость V транспортного средства, оцененное значение Td* градиентного крутящего момента, подсчитанное значение таймера 104 после определения остановки транспортного средства, степень повышения давления фрикционного тормоза 8a-8d и тормозной крутящий момент, предоставленный в электрическое транспортное средство 100. Фиг. 10(a)-(e) совместно используют общую временную ось на горизонтальной оси.
[0172] Этот пример показывает электрическое транспортное средство 100, когда электрическое транспортное средство 100, движущееся на дороге, идущей в подъем, останавливается. После времени t0, позиция AP акселератора постепенно снижается таким образом, что скорость V транспортного средства для электрического транспортного средства 100 в ходе движения уменьшается, как показано на фиг. 10(a). Оцененное значение Td* градиентного крутящего момента имеет положительное значение, как показано на фиг. 10(b), поскольку электрическое транспортное средство 100 движется по дороге, идущей в подъем.
[0173] Во время t1, скорость V транспортного средства опускается ниже порогового значения Th_s для остановки транспортного средства, как показано на фиг. 10(a), и в силу этого модуль 25 вычисления целевого останавливающего крутящего момента определяет то, что электрическое транспортное средство 100 останавливается. Модуль 25 вычисления целевого останавливающего крутящего момента в силу этого задает целевой останавливающий крутящий момент Ts_t, который превышает оцененное значение Td* градиентного крутящего момента, на основе оцененного значения Td* градиентного крутящего момента, как показано на фиг. 10(e).
[0174] Соответственно, тормозной контроллер 10 задает значение, идентичное значению рекуперативного крутящего момента мотора 4, в качестве начального фрикционного момента Tf_i и увеличивает давление тормозного масла, которое должно подаваться во фрикционные тормоза 8a-8d, таким образом, что оно не превышает верхнее предельное значение степени повышения давления для фрикционных тормозов 8a-8d. Фрикционный момент Tf в силу этого быстро увеличивается до начального фрикционного момента Tf_i.
[0175] После этого, подсчитанное значение таймера 104 увеличивается во времени, как показано на фиг. 10(c). Как показано на фиг. 10(d), модуль 105 вычисления степени повышения давления увеличивает или уменьшает степень повышения давления тормозного масла в соответствии с изменением подсчитанного значения таймера 104.
[0176] Это постепенно увеличивает фрикционный момент Tf, как показано на фиг. 10(e), так что электрическое транспортное средство 100 плавно останавливается таким образом, чтобы не вызывать некомфортное ощущение у водителя. Крутящий момент Tm мотора поддерживается в определенном диапазоне.
[0177] Во время t2, фрикционный момент Tf увеличивает целевой останавливающий крутящий момент Ts_t, который превышает оцененное значение Td* градиентного крутящего момента. Это обеспечивает возможность электрическому транспортному средству 100 надежно останавливаться независимо от градиента поверхности дороги. После этого, в то время как трение Tf поддерживается постоянно, тормозной контроллер 10 постепенно снижает крутящий момент мотора. Это уменьшает потребление мощности мотора 4.
[0178] Как указано выше, когда определяется то, что электрическое транспортное средство 100 находится в момент времени непосредственно перед остановкой, тормозной крутящий момент, предоставленный в электрическое транспортное средство 100, переключается с крутящего момента Tm мотора (рекуперативного крутящего момента) на фрикционный момент Tf, и фрикционный момент после переключения задается равным значению, большему оцененного значения Td* градиентного крутящего момента. Таким образом, сила трения используется в качестве тормозной силы электрического транспортного средства 100, и в силу этого электрическое транспортное средство 100 надежно останавливается.
[0179] Из параметров, заданных для модели Gr(s) транспортного средства, показанной на фиг. 6, вес электрического транспортного средства 100, например, может иметь большую разность между фактическим значением и заданным значением вследствие числа пассажиров и количества багажа на электрическом транспортном средстве 100, что может увеличивать ошибку оцененного значения Td* градиентного крутящего момента. Если электрическое транспортное средство 100 остановлено посредством крутящего момента Tm мотора в этом случае, тормозная сила, предоставленная в электрическое транспортное средство 100, является недостаточной, так что электрическое транспортное средство 100 может не иметь возможность останавливаться согласно намерению водителя.
[0180] Чтобы не допускать этого, когда электрическое транспортное средство 100 находится в момент времени непосредственно перед остановкой, контроллер 2 мотора настоящего варианта осуществления изменяет тормозной крутящий момент, предоставленный в электрическое транспортное средство 100, с крутящего момента Tm мотора на фрикционный момент Tf, и задает значение, превышающее оцененное значение Td* градиентного крутящего момента, в качестве тормозного крутящего момента. Это плавно останавливает электрическое транспортное средство 100 таким образом, чтобы не вызывать некомфортное ощущение у водителя.
[0181] Тормозной контроллер 10 настоящего варианта осуществления регулирует степень повышения давления тормозного масла, которое должно подаваться во фрикционные тормоза 8a-8d, с учетом механических характеристик фрикционных тормозов 8a-8d таким образом, что фрикционный момент Tf превышает оцененное значение Td* градиентного крутящего момента. Это подавляет продольное ускорение в электрическом транспортном средстве 100 непосредственно перед остановкой таким образом, что электрическое транспортное средство останавливается плавно.
[0182] Выше описывается неограничивающий пример настоящего варианта осуществления, в котором, как показано на фиг. 9, модуль 105 вычисления степени повышения давления регулирует степень повышения давления тормозного масла в соответствии с истекшим временем после определения остановки транспортного средства. Далее описывается другой пример модуля 105 вычисления степени повышения давления для того, чтобы регулировать степень повышения давления тормозного масла.
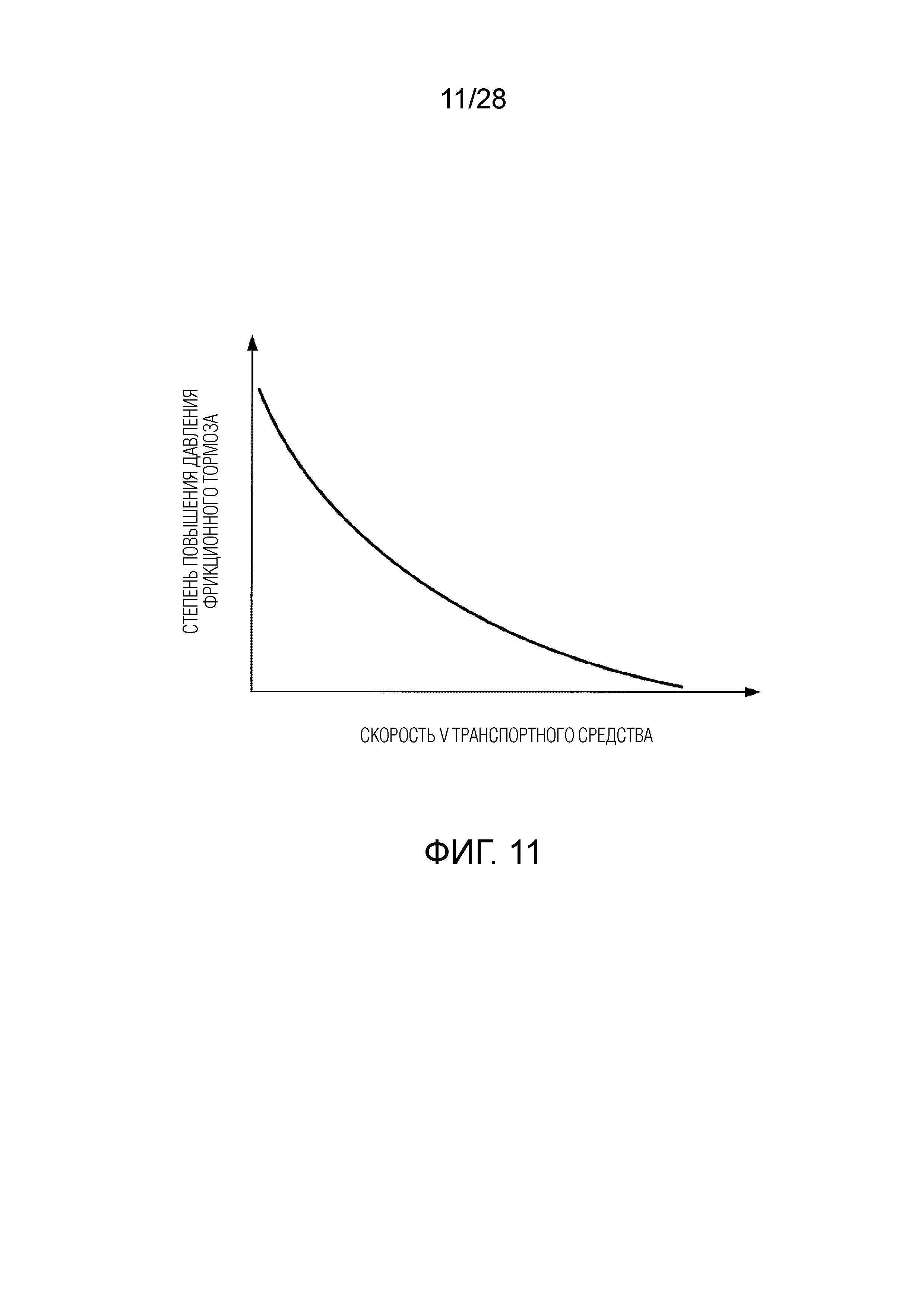
[0183] Фиг. 11 описывает другой пример модуля 105 вычисления степени повышения давления настоящего варианта осуществления.
[0184] В этом примере, модуль 105 вычисления степени повышения давления сохраняет таблицу степеней повышения давления заранее, причем таблица повышения давления показывает взаимосвязь между степенью повышения давления тормозного масла, которое должно подаваться во фрикционные тормоза 8a-8d, и скоростью V транспортного средства. С учетом механических характеристик фрикционных тормозов 8a-8d, таблица степеней повышения давления указывается заранее таким образом, чтобы подавлять продольное ускорение в электрическом транспортном средстве 100. Как показано на фиг. 11, таблица степеней повышения давления рисует обратно пропорциональную кривую таким образом, что степень повышения давления фрикционных тормозов 8a-8d постепенно увеличивается с уменьшением скорости V транспортного средства.
[0185] При получении скорости V транспортного средства, модуль 105 вычисления степени повышения давления обращается к таблице степеней повышения давления, показанной на фиг. 11, и вычисляет степень повышения давления в ассоциации с полученным значением скорости V транспортного средства. Затем модуль 105 вычисления степени повышения давления выводит вычисленную степень повышения давления в модуль 107 переключения степени повышения давления, показанный на фиг. 9.
[0186] Таким образом, модуль 105 вычисления степени повышения давления может изменять степень повышения давления фрикционных тормозов 8a-8d в соответствии со скоростью V транспортного средства, и такой модуль 105 вычисления степени повышения давления также останавливает электрическое транспортное средство 100 при подавлении продольного ускорения электрического транспортного средства 100.
[0187] Далее описывается способ остановки электрического транспортного средства 100 настоящего варианта осуществления.
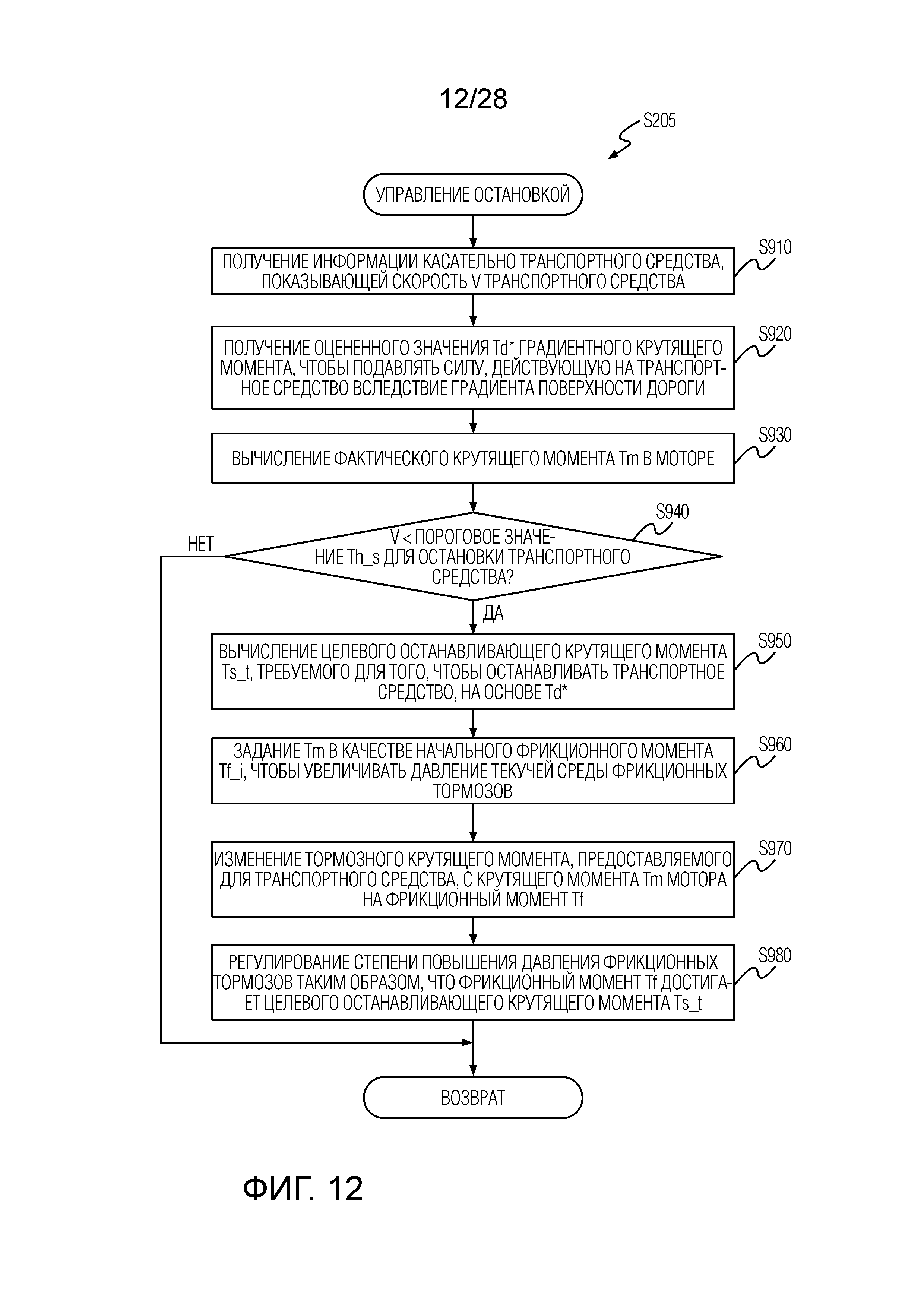
[0188] Фиг. 12 является блок-схемой последовательности операций способа, показывающей пример процедуры обработки управления остановкой на этапе S205 по фиг. 2.
[0189] На этапе S910, тормозной контроллер 10 получает информацию касательно транспортного средства, показывающую скорость V транспортного средства для электрического транспортного средства 100.
[0190] На этапе S920, контроллер 2 мотора вычисляет оцененное значение Td* градиентного крутящего момента, чтобы подавлять силу тяжести, действующую на электрическое транспортное средство 100 главным образом вследствие градиента поверхности дороги.
[0191] На этапе S930, тормозной контроллер 10 вычисляет крутящий момент Tm мотора, указывающий крутящий момент, сформированный в моторе 4, на основе трехфазных переменных токов iu, iv и iw.
[0192] На этапе S940, контроллер 2 мотора определяет то, меньше или нет скорость V транспортного средства порогового значения Th_s для остановки транспортного средства. Пороговое значение Th_s для остановки транспортного средства составляет пороговое значение, чтобы определять то, останавливается или нет электрическое транспортное средство 100. Когда скорость V транспортного средства составляет пороговое значение Th_s для остановки транспортного средства или больше, контроллер 2 мотора завершает обработку управления остановкой и возвращается в процедуру управления электрическим транспортным средством 100, показанную на фиг. 2.
[0193] На этапе S950, когда скорость V транспортного средства меньше порогового значения Th_s для остановки транспортного средства, контроллер 2 мотора вычисляет целевой останавливающий крутящий момент Ts_t, который требуется для того, чтобы надежно останавливать электрическое транспортное средство 100, независимо от присутствия или отсутствия градиента на основе оцененного значения Td* градиентного крутящего момента.
[0194] На этапе S960, тормозной контроллер 10 задает начальный фрикционный момент Tf_i таким образом, чтобы иметь достаточную скорость отклика фрикционных тормозов 8a-8d. Тормозной контроллер 10 настоящего варианта осуществления задает значение крутящего момента Tm мотора, вычисленное на этапе S930, в качестве начального фрикционного момента Tf_i.
[0195] Тормозной контроллер 10 затем увеличивает давление текучей среды, которая должна подаваться во фрикционные тормоза 8a-8d (давление тормозной текучей среды), на основе верхнего предельного значения степени повышения давления, которое задается посредством модуля 106 задания верхних пределов степени повышения давления, показанного на фиг. 9, так что фрикционный момент Tf достигает начального фрикционного момента Tf_i. Это поддерживает достаточную скорость отклика фрикционных тормозов 8a-8d и точно регулирует фрикционный момент Tf.
[0196] На этапе S970, тормозной контроллер 10 изменяет тормозной крутящий момент, используемый для электрического транспортного средства 100, с крутящего момента Tm мотора на фрикционный момент Tf. Например, когда фрикционный момент Tf увеличивается до начального фрикционного момента Tf_i, тормозной контроллер 10 постепенно увеличивает давление тормозной текучей среды таким образом, что фрикционный момент Tf достигает целевого останавливающего крутящего момента Ts_t при постепенном снижении крутящего момента Tm мотора. Это подавляет продольное ускорение в электрическом транспортном средстве 100 при уменьшении потребления мощности мотора 4.
[0197] На этапе S980, тормозной контроллер 10 регулирует степень повышения давления фрикционных тормозов 8a-8d таким образом, что фрикционный момент Tf увеличивается с начального фрикционного момента Tf_i до целевого останавливающего крутящего момента Ts_t, как показано на фиг. 10(d).
[0198] Например, как описано для модуля 105 вычисления степени повышения давления по фиг. 9, тормозной контроллер 10 постепенно увеличивает степень повышения давления в соответствии с истекшим временем с момента определения того, что электрическое транспортное средство 100 останавливается. Альтернативно, тормозной контроллер 10 может обращаться к таблице степеней повышения давления, показанной на фиг. 11, чтобы постепенно увеличивать степень повышения давления с уменьшением скорости V транспортного средства.
[0199] Это останавливает электрическое транспортное средство 100 плавно при подавлении продольного ускорения электрического транспортного средства 100.
[0200] Электрическое транспортное средство 100 согласно первому варианту осуществления настоящего изобретения включает в себя мотор 4, чтобы предоставлять рекуперативную тормозную силу в электрическое транспортное средство 100, и фрикционные тормоза 8a-8d, которые составляют фрикционный тормозной механизм, чтобы предоставлять фрикционную тормозную силу в электрическое транспортное средство 100. Как показано на фиг. 2, способ управления для электрического транспортного средства 100 включает в себя этап S202, чтобы вычислять целевой крутящий момент, указывающий значение Tm_t целевого крутящего момента мотора 4, на основе позиции AP акселератора, показывающей смещение педали акселератора, и этап S203, чтобы оценивать градиентный крутящий момент для того, чтобы подавлять возмущения вследствие градиента поверхности дороги. Возмущения главным образом представляют собой силу тяжести, внешне действующую на электрическое транспортное средство 100 вследствие градиента поверхности дороги.
[0201] Способ управления для электрического транспортного средства 100 дополнительно включает в себя этап S204 для того, чтобы вычислять значение Tm* команды управления крутящим моментом мотора на основе оцененного значения Td* градиентного крутящего момента и значения Tm_t целевого крутящего момента, и этапы S206 в S208 для того, чтобы управлять крутящим моментом Tm мотора, сформированным в моторе 4, на основе значения Tm* команды управления крутящим моментом мотора. Способ управления для электрического транспортного средства 100 дополнительно включает в себя этап S205, когда электрическое транспортное средство 100 останавливается, для того чтобы задавать значение, превышающее оцененное значение Td* градиентного крутящего момента для тормозного крутящего момента, предоставленного в электрическое транспортное средство 100, и изменять тормозной крутящий момент с крутящего момента Tm мотора на фрикционный момент Tf фрикционных тормозов 8a-8d. Фрикционный момент Tf в этом случае представляет собой параметр, полученный посредством преобразования фрикционной тормозной силы, сформированной посредством фрикционных тормозов 8a-8d, в крутящий момент в ведущем валу мотора 4.
[0202] Таким образом, когда электрическое транспортное средство 100 находится в момент времени непосредственно перед остановкой, устройство 110 управления изменяет тормозную силу, предоставленную в электрическое транспортное средство 100, с тормозной силы мотора 4 на фрикционную тормозную силу, и останавливает электрическое транспортное средство 100 с фрикционным моментом Tf, который превышает оцененное значение Td* градиентного крутящего момента.
[0203] Это обусловлено тем, что вес электрического транспортного средства 100, который используется для того, чтобы оценивать градиентный крутящий момент, может значительно отличаться между заданным значением и фактическим значением вследствие увеличения или уменьшения числа пассажиров и количества багажа на электрическом транспортном средстве 100, например, и такая разность увеличивает ошибку оцененного значения Td* градиентного крутящего момента. Как результат, если электрическое транспортное средство останавливается на дороге с уклоном с крутящим моментом Tm мотора, тормозная сила для электрического транспортного средства 100 может быть недостаточной вследствие такой большой ошибки значения Tm команды управления крутящим моментом мотора и в силу этого создает помехи плавной остановке.
[0204] Чтобы исключать эту проблему вследствие большой ошибки оцененного значения Td* градиентного крутящего момента, вызываемой посредством изменения веса электрического транспортного средства 100, способ управления изменяет тормозной крутящий момент электрического транспортного средства 100 на фрикционный момент Tf и увеличивает фрикционный момент Tf таким образом, что он превышает оцененное значение Td* градиентного крутящего момента. Это обеспечивает возможность электрическому транспортному средству 100 останавливаться хорошо независимо от варьирования параметров, чтобы оценивать градиентный крутящий момент, таких как вес электрического транспортного средства 100, вне зависимости от того, находится электрическое транспортное средство на дороге, идущей в подъем, или на дороге, идущей под спуск.
[0205] Таким образом, настоящий вариант осуществления обеспечивает возможность транспортному средству останавливаться хорошо независимо от изменения градиента поверхности дороги, по которой движется транспортное средство.
[0206] На этапе S205 настоящего варианта осуществления, контроллер 2 мотора определяет то, останавливается или нет электрическое транспортное средство 100. Когда контроллер 2 мотора определяет то, что электрическое транспортное средство 100 останавливается, тормозной контроллер 10 управляет степенью увеличения фрикционного момента Tf в соответствии с рабочим состоянием электрического транспортного средства 100.
[0207] В одном примере, тормозной контроллер 10 увеличивает степень повышения давления текучей среды, которая должна подаваться во фрикционные тормоза 8a-8d, в соответствии с истекшим временем после определения того, что электрическое транспортное средство 100 останавливается. Он увеличивает степень повышения давления с истекшим временем после определения остановки транспортного средства и за счет этого плавно останавливает электрическое транспортное средство 100 посредством простого способа таким образом, чтобы не вызывать некомфортное ощущение у водителя.
[0208] В другом примере, тормозной контроллер 10 может увеличивать степень повышения давления текучей среды, которая должна подаваться во фрикционные тормоза 8a-8d, в соответствии с уменьшением скорости V транспортного средства, которая представляет собой скорость электрического транспортного средства 100. Этот случай также увеличивает степень повышения давления с уменьшением скорости V транспортного средства и в силу этого плавно останавливает электрическое транспортное средство 100, аналогично вышеприведенному примеру.
[0209] Таким образом, способ регулирует степень увеличения фрикционного момента Tf в соответствии с истекшим временем после определения остановки транспортного средства или в соответствии с рабочим состоянием электрического транспортного средства 100, к примеру, скорость V транспортного средства, за счет чего способ обеспечивает плавную остановку электрического транспортного средства 100 с использованием фрикционной тормозной силы.
[0210] Согласно способу настоящего варианта осуществления, когда на этапе S205 определяется то, что электрическое транспортное средство 100 останавливается, тормозной контроллер 10 быстро увеличивает давление текучей среды во фрикционных тормозах 8a-8d таким образом, что фрикционный момент Tf равен крутящему моменту Tm мотора. После этого, тормозной контроллер 10 постепенно увеличивает степень повышения давления текучей среды во фрикционных тормозах 8a-8d.
[0211] Таким образом, способ увеличивает давление текучей среды, которая должна подаваться во фрикционные тормоза 8a-8d, до регулирования степени повышения давления во фрикционных тормозах 8a-8d. Это упрощает формирование фрикционной тормозной силы из фрикционных тормозов 8a-8d и за счет этого поддерживает достаточную скорость отклика фрикционной тормозной силы. Это обеспечивает точное регулирование степени увеличения фрикционного момента Tf и за счет этого реализует плавную остановку.
[0212] Согласно настоящему варианту осуществления, контроллер 2 мотора на этапе S205 определяет то, опускается или нет параметр, пропорциональный скорости V транспортного средства, ниже порогового значения Th_s для остановки транспортного средства. Когда такой параметр, пропорциональный скорости V транспортного средства, опускается ниже порогового значения Th_s для остановки транспортного средства, тормозной контроллер 10 увеличивает фрикционный момент Tf до целевого останавливающего крутящего момента Ts_t, который превышает абсолютное значение оцененного значения Td* градиентного крутящего момента.
[0213] Он задает большее значение, чем оцененное значение Td* градиентного крутящего момента, в качестве фрикционного момента Tf, чтобы останавливать электрическое транспортное средство 100, и в силу этого надежно останавливает электрическое транспортное средство 100 при уменьшении некомфортного ощущения, вызываемого у водителя.
[0214] В частности, целевой останавливающий крутящий момент Ts_t в настоящем варианте осуществления задается заранее на основе температурных характеристик текучей среды, которая должна подаваться во фрикционные тормоза 8a-8d. Поскольку текучая среда во фрикционных тормозах 8a-8d имеет такие температурные характеристики, что фрикционная тормозная сила уменьшается с увеличением температуры, целевой останавливающий крутящий момент Ts_t задается равным значению, чтобы надежно останавливать электрическое транспортное средство 100, даже когда температура текучей среды увеличивается. Это предотвращает скольжение вниз (перемещение) электрического транспортного средства 100 на дороге, идущей в подъем, или на дороге, идущей под спуск, без остановки.
[0215] Согласно настоящему варианту осуществления, целевой останавливающий крутящий момент Ts_t задается в пределах диапазона обеспечения плавного трогания с места электрического транспортного средства 100 с фрикционным моментом Tf. Большее давление текучей среды во фрикционных тормозах 8a-8d требует большего времени для того, чтобы уменьшать давление текучей среды во фрикционных тормозах 8a-8d при следующем трогании с места электрического транспортного средства 100. Это создает помехи плавному троганию с места электрического транспортного средства 100.
[0216] Чтобы не допускать этого, целевой останавливающий крутящий момент Ts_t задается в пределах диапазона обеспечения плавного трогания с места электрического транспортного средства 100, что обеспечивает как плавную остановку электрического транспортного средства 100, движущегося по дороге, идущей в подъем, или дороге, идущей под спуск, так и быстрое трогание с места электрического транспортного средства.
[0217] Второй вариант осуществления
Фиг. 13 является блок-схемой, показывающей один пример конфигурации модуля 22 вычисления градиентного крутящего момента во втором варианте осуществления настоящего изобретения.
[0218] Модуль 22 вычисления градиентного крутящего момента настоящего варианта осуществления корректирует оцененное значение Td* градиентного крутящего момента из блока 225 управления, показанного на фиг. 6 таким образом, чтобы не вызывать некомфортное ощущение у водителя электрического транспортного средства 100, движущегося по дороге, идущей в подъем, или дороге, идущей под спуск. Этот модуль 22 вычисления градиентного крутящего момента включает в себя, в дополнение к конфигурации (включающей в себя 221-225) на фиг. 6, модуль 226 обнаружения рабочего состояния парковочных тормозов, модуль 227 задания первого усиления, модуль 228 вычисления второго усиления, переключатель 229 выбора максимума и модуль 230 коррекции градиентного крутящего момента.
[0219] Модуль 226 обнаружения рабочего состояния парковочных тормозов обнаруживает рабочее состояние парковочных тормозов 9c и 9d. Модуль 226 обнаружения рабочего состояния парковочных тормозов выводит сигнал PB обнаружения, указывающий обнаруженное состояние парковочных тормозов 9c и 9d, в модуль 227 задания первого усиления.
[0220] Например, когда парковочные тормоза 9c и 9d работают таким образом, чтобы предоставлять фрикционную тормозную силу на ведомые колеса 7c и 7d, модуль 226 обнаружения рабочего состояния парковочных тормозов выводит сигнал PB обнаружения, указывающий включенное состояние парковочных тормозов 9c и 9d. Когда парковочные тормоза 9c и 9d отпускаются таким образом, чтобы не предоставлять фрикционную тормозную силу на ведомые колеса 7c и 7d, модуль 226 обнаружения рабочего состояния парковочных тормозов выводит сигнал PB обнаружения, указывающий отключенное состояние парковочных тормозов 9c и 9d.
[0221] Модуль 227 задания первого усиления выводит первое усиление K1 в переключатель 229 выбора максимума. Первое усиление K1 должно корректировать оцененное значение Td* градиентного крутящего момента в соответствии с сигналом PB обнаружения из модуля 226 обнаружения рабочего состояния парковочных тормозов. Первое усиление K1 имеет значение в диапазоне от 0,0 до 1,0.
[0222] Первое усиление K1 может быть переменной, которая меняется в зависимости от оцененного значения Td* градиентного крутящего момента. В этом случае, первое усиление K1 уменьшается с увеличением оцененного значения Td* градиентного крутящего момента в положительную сторону или в отрицательную сторону. Альтернативно, оцененное значение Td* градиентного крутящего момента может составлять фиксированное значение, такое как 0,5.
[0223] Когда первое усиление K1 задается равным 1,0, например, оцененное значение Td* градиентного крутящего момента отменяет все возмущения от сопротивления вследствие градиента. Электрическое транспортное средство 100 в силу этого движется, как если транспортное средство движется на ровной дороге без уклона. Это означает то, что смещение педали акселератора водителем является идентичным смещению педали на ровной дороге.
[0224] Между тем, когда водитель осуществляет приведение в движение транспортного средства с двигателем внутреннего сгорания, имеющего двигатель внутреннего сгорания в качестве источника приведения в движение, на дороге, идущей в подъем, или на дороге, идущей под спуск, если он намеревается осуществлять приведение в движение транспортного средства как на ровной дороге, смещение педали акселератора должно изменяться относительно смещения на ровной дороге. Первое усиление K1, заданное равным 1,0, в силу этого может вызывать у водителя электрического транспортного средства 100 некомфортное ощущение на дороге, идущей в подъем, или на дороге, идущей под спуск, вследствие отличия удобства использования от транспортного средства с двигателем внутреннего сгорания.
[0225] Чтобы не допускать этого, когда оцененное значение Td* градиентного крутящего момента превышает предварительно определенный диапазон, включающий в себя 0 (нуль), т.е. дорога представляет собой дорогу, идущую в подъем, или дорогу, идущую под спуск, первое усиление K1 предпочтительно задается равным значению, меньшему 1,0. Когда оцененное значение Td* градиентного крутящего момента находится в пределах предварительно определенного диапазона, первое усиление K1 может задаваться равным 1,0.
[0226] Таким образом, при приеме сигнала PB обнаружения, указывающего отключенное состояние парковочных тормозов 9c и 9d, модуль 227 задания первого усиления выводит первое усиление K1 в переключатель 229 выбора максимума таким образом, чтобы корректировать оцененное значение Td* градиентного крутящего момента.
[0227] При приеме сигнала PB обнаружения, указывающего включенное состояние парковочных тормозов 9c и 9d, модуль 227 задания первого усиления выводит 0 (нуль) в переключатель 229 выбора максимума.
[0228] Когда парковочные тормоза 9c и 9d работают, модуль 22 вычисления градиентного крутящего момента вычисляет оцененное значение Td* градиентного крутящего момента для электрического транспортного средства 100, на которое действуют сопротивление вследствие градиента, а также фрикционная тормозная сила посредством парковочных тормозов 9c и 9d. Это оцененное значение Td* градиентного крутящего момента включает в себя компонент, отменяющий тормозной крутящий момент посредством парковочных тормозов 9c и 9d, и коррекция оцененного значения Td* градиентного крутящего момента с первым усилением K1 в силу этого может не позволять подавлять тормозной крутящий момент посредством парковочных тормозов 9c и 9d вследствие величины коррекции. Это может приводить к сбою при выполнении торможения согласно намерению водителя. Чтобы не допускать этого, при приеме сигнала PB обнаружения, указывающего включенное состояние, модуль 227 задания первого усиления выводит 0 в переключатель 229 выбора максимума таким образом, чтобы не корректировать оцененное значение Td* градиентного крутящего момента.
[0229] Чтобы надежно останавливать электрическое транспортное средство 100 непосредственно перед остановкой модуль 228 вычисления второго усиления вычисляет второе усиление K2, чтобы корректировать оцененное значение Td* градиентного крутящего момента при обращении к предварительно определенному арифметическому уравнению или таблице усилений. Модуль 228 вычисления второго усиления задает большее второе усиление K2 для меньшей скорости V транспортного средства.
[0230] Например, модуль 228 вычисления второго усиления обращается к таблице усилений и приближает второе усиление K2 к 1,0 для скорости V транспортного средства, более близкой к 0. Он задает второе усиление K2 равным 1,0, когда скорость V транспортного средства равна 0. Следовательно, он не корректирует оцененное значение Td* градиентного крутящего момента таким образом, что оно является небольшим, и за счет этого не допускает нехватки тормозной силы электрического транспортного средства 100.
[0231] Даже когда парковочные тормоза 9c и 9d работают, скорость V транспортного средства типично является небольшой, и величина коррекции оцененного значения Td* градиентного крутящего момента является небольшой. Тормозной крутящий момент посредством парковочных тормозов 9c и 9d в силу этого, в общем, отменяется. Это обеспечивает плавную остановку электрического транспортного средства 100 при уменьшении некомфортного ощущения, вызываемого у водителя.
[0232] Модуль 228 вычисления второго усиления выводит вычисленное второе усиление K2 в переключатель 229 выбора максимума. Ниже описывается таблица усилений, заданная в модуле 228 вычисления второго усиления, со ссылкой на фиг. 14.
[0233] Переключатель 229 выбора максимума выводит большее значение между первым усилением K1, выводимым из модуля 227 задания первого усиления, и вторым усилением K2, выводимым из модуля 228 вычисления второго усиления, в модуль 230 коррекции градиентного крутящего момента.
[0234] Модуль 230 коррекции градиентного крутящего момента корректирует оцененное значение Td* градиентного крутящего момента из блока 225 управления в соответствии с выходным значением из переключателя 229 выбора максимума. Модуль 230 коррекции градиентного крутящего момента настоящего варианта осуществления умножает оцененное значение Td* градиентного крутящего момента на усиление, выводимое из переключателя 229 выбора максимума, чтобы вычислять новое оцененное значение Td* градиентного крутящего момента. Модуль 230 коррекции градиентного крутящего момента выводит вычисленное оцененное значение Td* градиентного крутящего момента в модуль 23 вычисления командного крутящего момента и модуль 25 вычисления целевого останавливающего крутящего момента, показанные на фиг. 3.
[0235] Фиг. 14 схематично описывает один пример таблицы усилений, сохраненной в модуле 228 вычисления второго усиления. В этом примере, вертикальная ось представляет второе усиление K2, и горизонтальная ось представляет скорость V транспортного средства.
[0236] Как показано на фиг. 14, таблица задается таким образом, что по мере того, как скорость V транспортного средства уменьшается относительно предварительно определенной скорости V1, второе усиление K2 увеличивается. Таким образом, когда электрическое транспортное средство 100 находится в момент времени непосредственно перед остановкой, величина коррекции оцененного значения Td* градиентного крутящего момента является небольшой. Это обеспечивает возможность надежной остановки электрического транспортного средства 100.
[0237] В области, в которой скорость V транспортного средства превышает предварительно определенную скорость V1, второе усиление K2 задается равным 0, чтобы обеспечивать возможность переключателю 229 выбора максимума выбирать первое усиление K1. Это означает то, что первое усиление K1 корректирует оцененное значение Td* градиентного крутящего момента, и в силу этого удобство использования электрического транспортного средства 100 на дороге, идущей в подъем, или на дороге, идущей под спуск, является аналогичным удобству использования транспортного средства с двигателем внутреннего сгорания. Это позволяет уменьшать некомфортное ощущение, вызываемое у водителя электрического транспортного средства 100.
[0238] Согласно второму варианту осуществления настоящего изобретения, модуль 230 коррекции градиентного крутящего момента корректирует оцененное значение Td* градиентного крутящего момента таким образом, что оно уменьшается. Затем, когда электрическое транспортное средство 100 находится в момент времени непосредственно перед остановкой, модуль 230 коррекции градиентного крутящего момента приближает величину коррекции оцененного значения Td* градиентного крутящего момента к 0 в соответствии с уменьшением скорости V транспортного средства. Это уменьшает некомфортное ощущение, вызываемое у водителя электрического транспортного средства 100, движущегося по дороге, идущей в подъем, или дороге, идущей под спуск, и обеспечивает плавную и надежную остановку электрического транспортного средства 100.
[0239] Согласно настоящему варианту осуществления, модуль 230 коррекции градиентного крутящего момента корректирует оцененное значение Td* градиентного крутящего момента таким образом, что оно уменьшается в соответствии с увеличением оцененного значения Td* градиентного крутящего момента. Это дополнительно приближает удобство использования электрического транспортного средства 100 к удобству использования транспортного средства с двигателем внутреннего сгорания и в силу этого дополнительно уменьшает некомфортное ощущение, вызываемое у водителя электрического транспортного средства 100.
[0240] Когда модуль 226 обнаружения рабочего состояния парковочных тормозов выводит сигнал PB обнаружения, указывающий включенное состояние, модуль 227 задания первого усиления настоящего варианта осуществления выводит 0 вместо первого усиления K1. Модуль 230 коррекции градиентного крутящего момента в силу этого не выполняет коррекцию на основе первого усиления K1. Таким образом, когда парковочные тормоза 9c и 9d предоставляют фрикционную тормозную силу в электрическое транспортное средство 100, модуль 230 коррекции градиентного крутящего момента подавляет коррекцию оцененного значения Td* градиентного крутящего момента.
[0241] Это отменяет тормозной крутящий момент посредством парковочных тормозов 9c и 9d, даже когда парковочные тормоза 9c и 9d работают, и в силу этого плавно останавливает электрическое транспортное средство 100 таким образом, чтобы не вызывать некомфортное ощущение у водителя.
[0242] Третий вариант осуществления
Фиг. 15 является блок-схемой, показывающей один пример конфигурации модуля 22 вычисления градиентного крутящего момента в третьем варианте осуществления настоящего изобретения.
[0243] Когда определяется то, что электрическое транспортное средство 100 находится в состоянии скольжения, модуль 22 вычисления градиентного крутящего момента настоящего варианта осуществления ограничивает оцененное значение Td* градиентного крутящего момента. Этот модуль 22 вычисления градиентного крутящего момента включает в себя, в дополнение к конфигурации (включающей в себя 226-230) на фиг. 13, модуль 231 вычисления скорости вращения ведущих колес, модуль 232 вычисления скорости вращения ведомых колес, модуль 233 определения скольжения, модуль 234 задания маски и модуль 235 ограничения градиентного крутящего момента.
[0244] Модуль 231 вычисления скорости вращения ведущих колес вычисляет скорость вращения для ведущих колес 7a и 7b на основе значений определения датчиков 13a и 13b скорости вращения колес. Модуль 231 вычисления скорости вращения ведущих колес настоящего варианта осуществления вычисляет среднюю скорость WS1ave вращения ведущих колес 7a и 7b на основе значений определения датчиков 13a и 13b скорости вращения колес.
[0245] Модуль 231 вычисления скорости вращения ведущих колес выводит среднюю скорость WS1ave вращения ведущих колес 7a и 7b в модуль 233 определения скольжения. Модуль 231 вычисления скорости вращения ведущих колес может выводить любое из значений скорости вращения ведущих колес 7a и 7b.
[0246] Модуль 232 вычисления скорости вращения ведомых колес вычисляет скорость вращения для ведомого колеса 7c и 7d на основе значений определения датчиков 13c и 13d скорости вращения колес. Модуль 232 вычисления скорости вращения ведомых колес настоящего варианта осуществления вычисляет среднюю скорость WS2ave вращения ведомого колеса 7c и 7d на основе значений определения датчиков 13c и 13d скорости вращения колес.
[0247] Модуль 232 вычисления скорости вращения ведомых колес выводит среднюю скорость WS2ave вращения ведомого колеса 7c и 7d в модуль 233 определения скольжения. Модуль 232 вычисления скорости вращения ведомых колес может выводить любое из значений скорости вращения ведомого колеса 7c и 7d.
[0248] Модуль 233 определения скольжения определяет то, находится или нет электрическое транспортное средство 100 в состоянии скольжения, и выводит результат определения в модуль 235 ограничения градиентного крутящего момента.
[0249] Модуль 233 определения скольжения настоящего варианта осуществления вычисляет скорость скольжения электрического транспортного средства 100 на основе средней скорости WS1ave вращения ведущих колес 7a и 7b и средней скорости WS2ave вращения ведомых колес 7c и 7d. Модуль 233 определения скольжения настоящего варианта осуществления вычисляет скорость Rs скольжения в соответствии со следующим уравнением (14).
[0250] уравнение 14

[0251] Затем модуль 233 определения скольжения определяет то, превышает или нет абсолютное значение скорости Rs скольжения пороговое значение для скольжения. Пороговое значение для скольжения, например, задается заранее на основе результата исследования или моделирования.
[0252] Когда скорость Rs скольжения превышает пороговое значение для скольжения, затем модуль 233 определения скольжения определяет то, что электрическое транспортное средство 100 находится в состоянии скольжения, т.е. в состоянии с низким μ, и выводит сигнал определения, указывающий 1, в модуль 235 ограничения градиентного крутящего момента. Когда скорость Rs скольжения составляет пороговое значение для скольжения или меньше, затем модуль 233 определения скольжения определяет то, что электрическое транспортное средство 100 не находится в состоянии скольжения, и выводит сигнал определения, указывающий 0, в модуль 235 ограничения градиентного крутящего момента.
[0253] После определения того, что электрическое транспортное средство 100 находится в состоянии скольжения, модуль 233 определения скольжения выполняет обработку с использованием таймера, чтобы прекращать определение в течение предварительно определенной длительности или тройную последовательную обработку проверки, чтобы прекращать вывод сигнала определения до тех пор, пока идентичный результат определения не получается три раза последовательно. Это не допускает явления рыскания, имеющего частое переключение сигнала определения между 0 и 1.
[0254] Настоящий вариант осуществления показывает неограничивающий пример, как указано выше, так что модуль 233 определения скольжения определяет состояние скольжения электрического транспортного средства 100 на основе скорости Rs скольжения. В другом примере, модуль 233 определения скольжения вычисляет величину As скольжения посредством следующего уравнения (15), и когда величина As скольжения превышает предварительно определенное пороговое значение, модуль 233 определения скольжения определяет то, что электрическое транспортное средство находится в состоянии скольжения. Этот пример уменьшает нагрузку обработки вычисления, чтобы определять состояние скольжения.
[0255] уравнение 15

[0256] Модуль 234 задания маски задает 0 в модуле 235 ограничения градиентного крутящего момента таким образом, чтобы маскировать оцененное значение Td* градиентного крутящего момента из модуля 230 коррекции градиентного крутящего момента.
[0257] Модуль 235 ограничения градиентного крутящего момента ограничивает оцененное значение Td* градиентного крутящего момента, выводимое из модуля 230 коррекции градиентного крутящего момента, в соответствии с результатом определения посредством модуля 233 определения скольжения.
[0258] При приеме сигнала определения, указывающего 0, из модуля 233 определения скольжения, модуль 235 ограничения градиентного крутящего момента настоящего варианта осуществления выводит оцененное значение Td* градиентного крутящего момента в модуль 23 вычисления командного крутящего момента и модуль 25 вычисления целевого останавливающего крутящего момента, показанные на фиг. 3.
[0259] При приеме сигнала определения, указывающего 1, из модуля 233 определения скольжения, модуль 235 ограничения градиентного крутящего момента выводит 0 (нуль), заданный в модуле 234 задания маски, в модуль 23 вычисления командного крутящего момента и модуль 25 вычисления целевого останавливающего крутящего момента.
[0260] Таким образом, когда определяется то, что электрическое транспортное средство 100 находится в состоянии скольжения, модуль 22 вычисления градиентного крутящего момента изменяет скорректированное оцененное значение Td* градиентного крутящего момента на 0 (нуль). Это не допускает флуктуации в ускорении электрического транспортного средства 100 вследствие флуктуации в оцененном значении Td* градиентного крутящего момента, вызываемой посредством скольжения, при уменьшении некомфортного ощущения, вызываемого у водителя электрического транспортного средства 100, движущегося по дороге, идущей в подъем, или дороге, идущей под спуск. Такое уменьшенное некомфортное ощущение водителя приводит к плавной остановке электрического транспортного средства 100.
[0261] Когда электрическое транспортное средство 100 определяется как находящееся в состоянии скольжения, модуль 22 вычисления градиентного крутящего момента настоящего варианта осуществления задает оцененное значение Td* градиентного крутящего момента равным 0. В другом примере, модуль 22 вычисления градиентного крутящего момента может задавать оцененное значение Td* градиентного крутящего момента равным определенному значению в диапазоне от оцененного значения Td* градиентного крутящего момента до 0. Этот пример также подавляет флуктуацию ускорения электрического транспортного средства 100.
[0262] Фиг. 16 является блок-схемой, показывающей один пример конфигурации модуля 25 вычисления целевого останавливающего крутящего момента настоящего варианта осуществления.
[0263] Модуль 25 вычисления целевого останавливающего крутящего момента настоящего варианта осуществления ограничивает целевой останавливающий крутящий момент Ts_t в соответствии с рабочим состоянием и состоянием скольжения электрического транспортного средства 100. Модуль 25 вычисления целевого останавливающего крутящего момента включает в себя, в дополнение к конфигурации (включающей в себя 251-254) на фиг. 8, модуль 255 определения остановки транспортного средства, модуль 256 задания начальных пороговых значений, модуль 257 сравнения, модуль 258 вычисления "AND", модуль 259 задания крутящего момента для поддержания остановки, модуль 260 переключения крутящего момента и модуль 261 ограничения варьирования.
[0264] Модуль 255 определения остановки транспортного средства определяет, на основе скорости V транспортного средства и позиции SR селектора выбора передач, то, электрическое транспортное средство 100 останавливается или находится в состоянии, близком к остановке, либо нет. Ниже описывается способ определения остановки посредством модуля 255 определения остановки транспортного средства со ссылкой на нижеприведенный чертеж. Модуль 255 определения остановки транспортного средства выводит результат определения в модуль 258 вычисления "AND".
[0265] Более конкретно, когда модуль 255 определения остановки транспортного средства определяет то, что электрическое транспортное средство 100 останавливается или находится в состоянии, близком к остановке, модуль 255 определения остановки транспортного средства задает флаг определения остановки транспортного средства равным 1. Когда модуль 255 определения остановки транспортного средства определяет то, что электрическое транспортное средство 100 не останавливается либо не находится в состоянии, близком к остановке, модуль 255 определения остановки транспортного средства задает флаг определения остановки транспортного средства равным 0.
[0266] Модуль 256 задания начальных пороговых значений задает пороговое значение Th_dr для приведения в движение в модуле 257 сравнения. Пороговое значение Th_dr для приведения в движение указывается, чтобы определять то, формируется или нет операция нажатия для педали акселератора. Пороговое значение Th_dr для приведения в движение настоящего варианта осуществления задается равным 1,0% от позиции акселератора.
[0267] Модуль 257 сравнения сравнивает позицию AP акселератора и пороговое значение Th_dr для приведения в движение и выводит результат сравнения в модуль 258 вычисления "AND". Когда позиция AP акселератора составляет пороговое значение Th_dr для приведения в движение или больше, модуль 257 сравнения определяет то, что операция нажатия для педали акселератора формируется, и задает флаг определения отмены операции равным 0. Когда позиция AP акселератора меньше порогового значения Th_dr для приведения в движение, модуль 257 сравнения определяет то, что операция нажатия для педали акселератора не формируется, и задает флаг определения отмены операции равным 1.
[0268] Когда все из сигнала определения в модуле 233 определения скольжения, флага определения остановки транспортного средства и флага определения отмены операции равно 1, модуль 258 вычисления "AND" выводит разрешающий сигнал, чтобы разрешать увеличение фрикционного момента Tf, в модуль 260 переключения крутящего момента. Таким образом, когда педаль акселератора не нажимается, и когда электрическое транспортное средство 100 в состоянии с низким μ находится в состоянии остановки или близко к состоянию остановки, модуль 258 вычисления "AND" разрешает увеличение фрикционной тормозной силы, предоставленной в электрическое транспортное средство 100.
[0269] Когда, по меньшей мере, любое одно из сигнала определения в модуле 233 определения скольжения, флага определения остановки транспортного средства и флага определения отмены операции равно 0, модуль 258 вычисления "AND" выводит запрещающий сигнал, чтобы запрещать увеличение фрикционного момента Tf, в модуль 260 переключения крутящего момента. Таким образом, когда электрическое транспортное средство 100 практически не скользит вниз, т.е. транспортное средство практически не перемещается, модуль 258 вычисления "AND" подавляет необязательное увеличение фрикционного момента Tf.
[0270] Модуль 259 задания крутящего момента для поддержания остановки задает крутящий момент Tsh для поддержания остановки в модуле 260 переключения крутящего момента. Крутящий момент Tsh для поддержания остановки представляет собой фрикционный момент, указываемый таким образом, чтобы останавливать электрическое транспортное средство 100 на каждой предполагаемой дороге с уклоном. Крутящий момент Tsh для поддержания остановки составляет значение, большее оцененного значения Td* градиентного крутящего момента, которое выводится из модуля 235 ограничения градиентного крутящего момента.
[0271] Модуль 260 переключения крутящего момента изменяет оцененное значение Td* градиентного крутящего момента, выводимое из модуля 235 ограничения градиентного крутящего момента, на крутящий момент Tsh для поддержания остановки в соответствии с выходным сигналом из модуля 258 вычисления "AND". Таким образом, когда транспортное средство может перемещаться, поскольку поверхность дороги находится в состоянии с низким μ, модуль 260 переключения крутящего момента увеличивает фрикционный момент Tf посредством фрикционных тормозов 8a-8d.
[0272] Более конкретно, при приеме разрешающего сигнала из модуля 258 вычисления "AND", т.е. когда транспортное средство может перемещаться вследствие состояния с низким μ поверхности дороги, модуль 260 переключения крутящего момента выводит крутящий момент Tsh для поддержания остановки в модуль 261 ограничения варьирования. При приеме запрещающего сигнала из модуля 258 вычисления "AND", т.е. когда электрическое транспортное средство 100 практически не скользит вниз, модуль 260 переключения крутящего момента выводит оцененное значение Td* градиентного крутящего момента из модуля 235 ограничения градиентного крутящего момента в модуль 261 ограничения варьирования.
[0273] Во время переключения с оцененного значения Td* градиентного крутящего момента на крутящий момент Tsh для поддержания остановки, модуль 261 ограничения варьирования выполняет обработку, чтобы ограничивать варьирование в единицу времени относительно крутящего момента Tsh для поддержания остановки таким образом, что степень повышения давления для давления текучей среды во фрикционных тормозах 8a-8d не превышает верхнее предельное значение. Это подавляет звуковую вибрацию во время повышения давления текучей среды во фрикционных тормозах 8a-8d.
[0274] Модуль 261 ограничения варьирования выводит крутящий момент Tsh для поддержания остановки, подвергнутый обработке ограничения варьирования или оцененному значению Td* градиентного крутящего момента, в качестве целевого останавливающего крутящего момента Ts_t в тормозной контроллер 10.
[0275] Таким образом, модуль 25 вычисления целевого останавливающего крутящего момента настоящего варианта осуществления увеличивает фрикционный момент Tf, предоставленный в электрическое транспортное средство 100, когда электрическое транспортное средство 100 останавливается в состоянии легкого скольжения. Это обеспечивает возможность надежной остановки электрического транспортного средства 100.
[0276] Фиг. 17 является блок-схемой последовательности операций способа, показывающей пример процедуры обработки определения остановки транспортного средства посредством модуля 255 определения остановки транспортного средства настоящего варианта осуществления.
[0277] На этапе S921, модуль 255 определения остановки транспортного средства получает информацию касательно транспортного средства, указывающую позицию SR селектора выбора передач и скорость V транспортного средства.
[0278] На этапе S922, модуль 255 определения остановки транспортного средства определяет то, находится или нет позиция SR селектора выбора передач в D-диапазоне (диапазоне переднего хода).
[0279] На этапе S923, когда позиция SR селектора выбора передач находится в D-диапазоне, модуль 255 определения остановки транспортного средства определяет то, меньше или нет скорость V транспортного средства порогового значения Th_d для переднего хода. Этот пример задает пороговое значение Th_d для переднего хода равным +1км/ч.
[0280] На этапе S924, когда скорость V транспортного средства меньше порогового значения Th_d для переднего хода, модуль 255 определения остановки транспортного средства задает флаг определения остановки транспортного средства равным 1.
[0281] На этапе S928, когда скорость V транспортного средства составляет пороговое значение Th_d для переднего хода или больше, модуль 255 определения остановки транспортного средства задает флаг определения остановки транспортного средства равным 0.
[0282] Когда этап S922 определяет то, что позиция SR селектора выбора передач не находится в D-диапазоне, модуль 255 определения остановки транспортного средства на этапе S925 определяет то, находится или нет позиция SR селектора выбора передач в R-диапазоне (диапазоне заднего хода).
[0283] Когда позиция SR селектора выбора передач находится в R-диапазоне, модуль 255 определения остановки транспортного средства на этапе S926 определяет то, превышает или нет скорость V транспортного средства пороговое значение Th_r для заднего хода. Этот пример задает пороговое значение Th_r для заднего хода равным -1км/ч. Когда скорость V транспортного средства превышает пороговое значение Th_r для заднего хода, модуль 255 определения остановки транспортного средства задает флаг определения остановки транспортного средства равным 1 на этапе S924.
[0284] Когда позиция SR селектора выбора передач не находится в R-диапазоне, либо когда скорость V транспортного средства составляет пороговое значение Th_r для заднего хода или меньше, модуль 255 определения остановки транспортного средства задает флаг определения остановки транспортного средства равным 0 на этапе S927.
[0285] Когда любой из этапов S924, S927 и S928 завершается таким образом, последовательность обработки определения остановки транспортного средства посредством модуля 255 определения остановки транспортного средства завершается.
[0286] Согласно третьему варианту осуществления настоящего изобретения, когда определение показывает то, что электрическое транспортное средство 100 находится в состоянии скольжения, модуль 22 вычисления градиентного крутящего момента ограничивает оцененное значение Td* градиентного крутящего момента. Таким образом, оцененное значение Td* градиентного крутящего момента задается равным значению, меньшему непосредственно оцененного значения Td* градиентного крутящего момента, например, равным 0. Это подавляет флуктуацию ускорения электрического транспортного средства 100.
[0287] Модуль 25 вычисления целевого останавливающего крутящего момента настоящего варианта осуществления увеличивает целевой останавливающий крутящий момент Ts_t, чтобы останавливать электрическое транспортное средство 100 в состоянии скольжения, по сравнению с целевым останавливающим крутящим моментом Ts_t, чтобы останавливать электрическое транспортное средство 100 в состоянии отсутствия скольжения. Это подавляет перемещение электрического транспортного средства 100 в такой ситуации.
[0288] Четвертый вариант осуществления
Далее описывается обработка подавления перемещения транспортного средства, чтобы подавлять перемещение транспортного средства, которое может возникать в ходе переключения селектора выбора передач из состояния остановки на состояние трогания с места электрического транспортного средства 100.
[0289] Фиг. 18 является блок-схемой последовательности операций способа, показывающей пример процедуры обработки управления остановкой в четвертом варианте осуществления настоящего изобретения. Обработка управления остановкой настоящего варианта осуществления включает в себя, в дополнение к этапам S910-S980 на фиг. 12, этап подавления перемещения транспортного средства на этапе S990.
[0290] Фиг. 19 является блок-схемой последовательности операций способа, показывающей пример процедуры обработки подавления перемещения транспортного средства настоящего варианта осуществления.
[0291] На этапе S991, тормозной контроллер 10 выполняет обработку определения остановки транспортного средства, чтобы определять то, останавливается или нет электрическое транспортное средство 100. Когда этот этап определяет то, что электрическое транспортное средство 100 останавливается, тормозной контроллер 10 настоящих вариантов осуществления задает флаг определения остановки транспортного средства равным 1. Когда этап определяет то, что электрическое транспортное средство 100 не останавливается, тормозной контроллер 10 задает флаг определения остановки транспортного средства равным 0. Ниже описываются подробности обработки определения остановки транспортного средства со ссылкой на нижеприведенный чертеж.
[0292] На этапе S992, тормозной контроллер 10 определяет то, равен или нет флаг определения остановки транспортного средства 1. Когда флаг определения остановки транспортного средства равен 0, тормозной контроллер 10 завершает обработку подавления перемещения транспортного средства.
[0293] Когда флаг определения остановки транспортного средства равен 1, тормозной контроллер 10 выполняет на этапе S993 обработку определения перемещения, чтобы определять то, перемещается или нет электрическое транспортное средство 100. Более конкретно, когда этот этап определяет то, что перемещение транспортного средства возникает, то тормозной контроллер 10 настоящего варианта осуществления задает флаг определения перемещения равным 1. Когда этап определяет то, что перемещение транспортного средства не возникает, то тормозной контроллер 10 задает флаг определения перемещения равным 0. Ниже описываются подробности обработки определения перемещения со ссылкой на фиг. 21.
[0294] На этапе S994, тормозной контроллер 10 определяет то, равен или нет флаг определения перемещения 1. Когда флаг определения перемещения равен 0, тормозной контроллер 10 завершает обработку подавления перемещения транспортного средства.
[0295] Когда флаг определения перемещения равен 1, тормозной контроллер 10 вычисляет на этапе S995 величину F перемещения транспортного средства, которая указывает расстояние перемещения электрического транспортного средства 100, на основе скорости V транспортного средства. Например, тормозной контроллер 10 умножает скорость V транспортного средства, полученную в каждом цикле Δt управления, на цикл Δt управления и суммирует эти произведения, чтобы вычислять величину F перемещения транспортного средства.
[0296] На этапе S996, тормозной контроллер 10 выполняет обработку обнаружения переключения селектора выбора передач, чтобы обнаруживать перемещение селектора выбора передач. Это служит для того, чтобы указывать ситуацию, когда возникает перемещение транспортного средства. Более конкретно, когда селектор выбора передач перемещается из предыдущей позиции в D-диапазон или R-диапазон, тормозной контроллер 10 настоящего варианта осуществления задает флаг D/R-обнаружения равным 1. Когда селектор выбора передач перемещается в другие позиции, тормозной контроллер 10 задает флаг D/R-обнаружения равным 0. Когда селектор выбора передач проходит через N-диапазон, предыдущая позиция селектора выбора передач поддерживается. Ниже описываются подробности обработки обнаружения переключения селектора выбора передач со ссылкой на фиг. 22.
[0297] На этапе S997, тормозной контроллер 10 определяет то, равен или нет флаг D/R-обнаружения 1. Когда флаг D/R-обнаружения равен 0, тормозной контроллер 10 завершает обработку подавления перемещения транспортного средства.
[0298] На этапе S998, тормозной контроллер 10 выполняет обработку коррекции тормозной силы таким образом, чтобы подавлять перемещение транспортного средства. В частности, тормозной контроллер 10 увеличивает целевой останавливающий крутящий момент Ts_t в соответствии с величиной F перемещения транспортного средства. Ниже описываются подробности обработки коррекции тормозной силы со ссылкой на фиг. 23.
[0299] Когда этап S998 завершается, это означает то, что обработка подавления перемещения транспортного средства завершается. Затем процедура возвращается к обработке управления остановкой на фиг. 18.
[0300] Фиг. 20 является блок-схемой последовательности операций способа, показывающей пример процедуры обработки определения остановки транспортного средства на этапе S991.
[0301] На этапе S931, тормозной контроллер 10 получает информацию касательно транспортного средства, указывающую позицию AP акселератора и скорость V транспортного средства.
[0302] На этапе S932, тормозной контроллер 10 определяет то, меньше или нет позиция AP акселератора порогового значения Th_dr для приведения в движение. Пороговое значение Th_dr для приведения в движение составляет пороговое значение, чтобы определять то, намеревается или нет водитель электрического транспортного средства 100 приводить в движение электрическое транспортное средство. Пороговое значение Th_dr для приведения в движение задается равным, например, 1%.
[0303] Когда позиция AP акселератора составляет пороговое значение Th_dr для приведения в движение или больше, тормозной контроллер 10 на этапе S935 определяет то, что водитель намеревается приводить в движение электрическое транспортное средство, и задает флаг определения остановки транспортного средства равным 0.
[0304] Когда позиция AP акселератора меньше порогового значения Th_dr для приведения в движение, тормозной контроллер 10 на этапе S933 определяет то, составляет абсолютное значение скорости V транспортного средства либо нет пороговое значение Th_st для остановки транспортного средства или меньше. Пороговое значение Th_st для остановки транспортного средства составляет пороговое значение, чтобы определять то, находится электрическое транспортное средство 100 в момент времени непосредственно перед остановкой или останавливается либо нет. В одном примере, пороговое значение Th_st для остановки транспортного средства задается равным нескольким км/ч, с учетом точности определения датчика скорости транспортного средства, чтобы определять скорость V транспортного средства. Пороговое значение Th_st для остановки транспортного средства может задаваться равным 0 км/ч.
[0305] Когда абсолютное значение скорости V транспортного средства превышает пороговое значение Th_st для остановки транспортного средства, тормозной контроллер 10 определяет то, что электрическое транспортное средство 100 не находится в момент времени непосредственно перед остановкой либо не находится в состоянии остановки, и процедура переходит к этапу S935.
[0306] Когда абсолютное значение скорости V транспортного средства составляет пороговое значение Th_st для остановки транспортного средства или меньше, тормозной контроллер 10 на этапе S934 определяет то, что электрическое транспортное средство 100 находится в момент времени непосредственно перед остановкой или находится в состоянии остановки, и задает флаг определения остановки транспортного средства равным 1.
[0307] Когда этап S934 или S935 завершается, это означает то, что обработка определения остановки транспортного средства завершается. Затем процедура возвращается к обработке подавления перемещения транспортного средства на фиг. 19.
[0308] Фиг. 21 является блок-схемой последовательности операций способа, показывающей пример процедуры обработки определения перемещения транспортного средства на этапе S993.
[0309] На этапе S941, тормозной контроллер 10 получает информацию касательно транспортного средства, указывающую позицию селектора выбора передач, которая представляет собой позицию селектора выбора передач, и скорость V транспортного средства.
[0310] На этапе S942, тормозной контроллер 10 определяет то, находится или нет позиция селектора выбора передач в D-диапазоне.
[0311] Когда позиция селектора выбора передач находится в D-диапазоне, тормозной контроллер 10 на этапе S943 определяет то, составляет скорость V транспортного средства либо нет пороговое значение Th_- для заднего хода или меньше, т.е. то, превышает скорость перемещения вперед транспортного средства либо нет пороговое значение Th_- для заднего хода. Пороговое значение Th_- для заднего хода составляет пороговое значение, чтобы определять то, превышает или нет скорость транспортного средства разрешенную скорость перемещения транспортного средства. Это пороговое значение имеет отрицательное значение. Пороговое значение Th_- для заднего хода, например, определяется заранее посредством исследования или моделирования.
[0312] Когда скорость V транспортного средства превышает пороговое значение Th_- для заднего хода, тормозной контроллер 10 на этапе S948 определяет то, что перемещение транспортного средства не возникает, и задает флаг определения перемещения равным 0.
[0313] Когда скорость V транспортного средства составляет пороговое значение Th_- для заднего хода или меньше, тормозной контроллер 10 на этапе S944 определяет то, что перемещение транспортного средства возникает, и задает флаг определения перемещения равным 1.
[0314] Когда позиция селектора выбора передач не находится в D-диапазоне на этапе S942, тормозной контроллер 10 на этапе S945 определяет то, представляет собой позиция селектора выбора передач или нет R.
[0315] Когда позиция селектора выбора передач не представляет собой R-диапазон, тормозной контроллер 10 задает флаг определения перемещения равным 0 на этапе S947.
[0316] Когда позиция селектора выбора передач находится в R-диапазоне, тормозной контроллер 10 на этапе S946, превышает или нет скорость V транспортного средства пороговое значение Th_+ для переднего хода, т.е. то, превышает или нет скорость обратного движения транспортного средства пороговое значение Th_+ для переднего хода. Пороговое значение Th_+ для переднего хода составляет пороговое значение, чтобы определять то, превышает или нет скорость транспортного средства разрешенную скорость перемещения транспортного средства. Это пороговое значение имеет положительное значение. Пороговое значение Th_+ для переднего хода, например, определяется заранее посредством исследования или моделирования.
[0317] Когда скорость V транспортного средства превышает пороговое значение Th_+ для переднего хода, тормозной контроллер 10 определяет то, что перемещение транспортного средства возникает. Затем процедура переходит к этапу S944, на котором тормозной контроллер 10 задает флаг определения перемещения равным 1. Когда скорость V транспортного средства составляет пороговое значение Th_+ для переднего хода или меньше, тормозной контроллер 10 определяет то, что перемещение транспортного средства не возникает. Затем процедура переходит к этапу S957, на котором тормозной контроллер 10 задает флаг определения перемещения равным 0.
[0318] Когда этапы S954, S957 и S958 завершаются, это означает то, что обработка определения перемещения завершается. Затем процедура возвращается к обработке подавления перемещения транспортного средства на фиг. 19.
[0319] Фиг. 22 является блок-схемой последовательности операций способа, показывающей пример процедуры обработки обнаружения переключения селектора выбора передач на этапе S996.
[0320] На этапе S951, тормозной контроллер 10 получает информацию касательно транспортного средства, указывающую позицию селектора выбора передач в этот раз и позицию селектора выбора передач в прошлый раз.
[0321] На этапе S952, тормозной контроллер 10 определяет то, отличается или нет позиция селектора выбора передач, полученная в этот раз, от позиции селектора выбора передач в прошлый раз, т.е. то, возникает или нет переключение селектора выбора передач.
[0322] Когда этот этап определяет то, что переключение селектора выбора передач не возникает, тормозной контроллер 10 задает флаг D/R-обнаружения равным 0 на этапе S955.
[0323] Когда этот этап определяет то, что переключение селектора выбора передач возникает, тормозной контроллер 10 на этапе S953 определяет то, представляет либо нет позиция селектора выбора передач в этот раз собой D-диапазон или R-диапазон. Когда позиция селектора выбора передач в этот раз не представляет собой ни D-диапазон, ни R-диапазон, процедура переходит к этапу S955, на котором тормозной контроллер 10 задает флаг D/R-обнаружения равным 0.
[0324] Когда позиция селектора выбора передач в этот раз представляет собой D-диапазон или R-диапазон, тормозной контроллер 10 задает флаг D/R-обнаружения равным 1 на этапе S954. Когда этап S954 или S955 завершается, это означает то, что обработка обнаружения переключения селектора выбора передач завершается. Затем процедура возвращается к обработке подавления перемещения транспортного средства на фиг. 19.
[0325] Фиг. 23 является блок-схемой последовательности операций способа, показывающей пример процедуры обработки коррекции тормозной силы на этапе S998.
[0326] На этапе S961, тормозной контроллер 10 задает базовый тормозной крутящий момент BT_b равным предварительно определенному значению, чтобы увеличивать тормозную силу для электрического транспортного средства 100. Предварительно определенное значение здесь задается в пределах диапазона поддержания плавного трогания с места электрического транспортного средства 100 на ровной дороге. Предварительно определенное значение может задаваться с учетом фрикционного момента, который уже предоставляется из фрикционных тормозов 8a-8d в электрическое транспортное средство 100 в соответствии с операцией нажатия педали тормоза.
[0327] Вышеуказанное предварительно определенное значение может задаваться в соответствии с градиентом поверхности дороги. В частности, когда градиент поверхности дороги является большим, тормозной контроллер 10 увеличивает предварительно определенное значение по сравнению с меньшим градиентом на основе определенного значения датчика 15 продольной составляющей G. Это подавляет расстояние перемещения электрического транспортного средства 100, даже когда электрическое транспортное средство останавливается на крутом уклоне.
[0328] На этапе S962, тормозной контроллер 10 определяет то, составляет либо нет величина F перемещения транспортного средства пороговое значение BU (движения задним ходом) или больше. Пороговое BU-значение Th_+ необходимо для того, чтобы определять то, требуется или нет тормозной крутящий момент в дополнение к базовому тормозному крутящему моменту BT_b, и это пороговое значение, например, определяется заранее посредством исследования или моделирования.
[0329] Когда величина F перемещения транспортного средства меньше порогового BU-значения, тормозной контроллер 10 на этапе S966 определяет то, что перемещение транспортного средства прекращается только с базовым тормозным крутящим моментом BT_b, и задает вспомогательный тормозной крутящий момент BT_a для того, чтобы дополнительно увеличивать величину увеличения тормозной силы, равным 0.
[0330] Когда величина F перемещения транспортного средства превышает пороговое BU-значение, тормозной контроллер 10 задает на этапе S963, в качестве вспомогательного тормозного крутящего момента BT_a, значение, полученное посредством умножения величины F перемещения транспортного средства на предварительно определенное усиление K системы управления. Он задает больший вспомогательный тормозной крутящий момент BT_a для большей величины F перемещения транспортного средства. Таким образом, тормозной контроллер 10 увеличивает фрикционный момент таким образом, что величина F перемещения транспортного средства становится равной 0.
[0331] На этапе S964, тормозной контроллер 10 суммирует базовый тормозной крутящий момент BT_b и вспомогательный тормозной крутящий момент BT_a и задает сумму в качестве крутящего момента Tmr для подавления перемещения.
[0332] На этапе S965, тормозной контроллер 10 суммирует крутящий момент Tmr для подавления перемещения с тормозным крутящим моментом Tp при операции с педалью, чтобы вычислять целевой останавливающий крутящий момент Ts_t. Тормозной крутящий момент Tp при операции с педалью задается в соответствии со смещением педали тормоза. Это обеспечивает возможность фрикционному крутящему моменту увеличиваться с крутящим моментом Tmr для подавления перемещения, когда только смещение педали тормоза не может останавливать транспортное средство.
[0333] Когда этап S965 завершается, это означает то, что обработка коррекции тормозной силы завершается. Затем процедура возвращается к обработке подавления перемещения транспортного средства на фиг. 19.
[0334] Далее описывается пример работы тормозного контроллера 10 настоящего варианта осуществления.
[0335] Фиг. 24 является временной диаграммой, описывающей способ подавления перемещения транспортного средства вследствие переключения селектора выбора передач электрического транспортного средства 100. Этот пример показывает способ подавления перемещения транспортного средства, когда электрическое транспортное средство 100, останавливающееся на дороге, идущей в подъем, начинает приводиться в движение.
[0336] На фиг. 24(a)-(i), вертикальная ось представляет скорость V транспортного средства, величину F перемещения транспортного средства, операцию задействования селектора выбора передач, сигнал позиции селектора выбора передач, операцию задействования фрикционного тормоза, флаг определения перемещения, базовый тормозной крутящий момент TB_b, вспомогательный тормозной крутящий момент TB_a и целевой останавливающий крутящий момент Ts_t, и горизонтальная ось представляет собой общую временную ось. Сигнал позиции селектора выбора передач представляет собой информацию касательно транспортного средства, указывающую позицию селектора выбора передач, которая представляет собой один из сигналов, вводимых в тормозной контроллер 10.
[0337] Во время t10, скорость V транспортного средства равна 0, величина F перемещения транспортного средства равна 0, и позиция селектора выбора передач находится в P-диапазоне. Таким образом, электрическое транспортное средство 100 находится в состоянии парковки. Тормозной контроллер 10 в силу этого задает флаг определения остановки транспортного средства равным 1.
[0338] Во время t11, как показано на фиг. 24(e), водитель выполняет операцию нажатия педали тормоза останавливающегося электрического транспортного средства 100, чтобы управлять транспортным средством. Наряду с этой операцией, тормозной контроллер 10 задает требуемый тормозной крутящий момент в качестве целевого останавливающего крутящего момента Ts_t, причем требуемый тормозной крутящий момент составляет требуемое значение тормозного крутящего момента в соответствии с операцией водителя. Это предоставляет фрикционный момент из фрикционных тормозов 8a-8d в электрическое транспортное средство 100, как показано на фиг. 24(i).
[0339] Во время t12, как показано на фиг. 24(c), позиция селектора выбора передач переключается с P-диапазона в D-диапазон. Наряду с тем, как показано на фиг. 24(a) и (b), электрическое транспортное средство 100 движется в направлении, противоположном направлению переднего хода, так что как скорость V транспортного средства, так и величина F перемещения транспортного средства увеличиваются в отрицательную сторону. Таким образом, электрическое транспортное средство 100 движется задним ходом вследствие перемещения транспортного средства. Тормозной контроллер 10 в силу этого изменяет флаг определения перемещения с 0 на 1 в соответствии со скоростью V транспортного средства.
[0340] В течение времени от времени t12 до времени t13, как показано на фиг. 24(c), позиция селектора выбора передач не является фиксированной, и как показано на фиг. 24(a) и (b), скорость V транспортного средства и величина F перемещения транспортного средства увеличиваются вследствие перемещения транспортного средства во времени после времени t12. Как показано на фиг. 24(d), сигнал позиции селектора выбора передач показывает позицию селектора выбора передач, идентичную позиции селектора выбора передач в P-диапазоне в прошлый раз. Тормозной контроллер 10 в силу этого определяет то, что переключение селектора выбора передач не возникает, поскольку позиция селектора выбора передач не изменяется между прошлым разом и этим разом.
[0341] В это время, величина F перемещения транспортного средства увеличивается, как показано на фиг. 24(b), и в силу этого вычисляемое значение, заданное в качестве вспомогательного тормозного крутящего момента BT_a, также постепенно увеличивается, как показано с помощью штрихпунктирной линии на фиг. 24 (h). Тормозной контроллер 10 настоящего варианта осуществления суммирует предварительно определенное усиление K системы управления с величиной F перемещения транспортного средства и задает вычисленное значение в качестве вспомогательного тормозного крутящего момента BT_a.
[0342] Во время t13, как показано на фиг. 24(c), позиция селектора выбора передач фиксируется в D-диапазоне, и в силу этого сигнал позиции селектора выбора передач переключается с P-диапазона в D-диапазон, как показано на фиг. 24(d). Тормозной контроллер 10 в силу этого определяет то, что переключение селектора выбора передач возникает, и задает флаг D/R-обнаружения равным 1.
[0343] В это время, все из флага определения остановки транспортного средства, флага определения перемещения и флага D/R-обнаружения равно 1, и тормозной контроллер 10 в силу этого выполняет обработку коррекции тормозной силы таким образом, чтобы подавлять перемещение транспортного средства, описанное со ссылкой на фиг. 23.
[0344] Более конкретно, как показано на фиг. 24(g) и (h), тормозной контроллер 10 задает базовый тормозной крутящий момент BT_b и вспомогательный тормозной крутящий момент BT_a и суммирует эти значения, чтобы вычислять крутящий момент Tmr для подавления перемещения. Затем, как показано на фиг. 24(i), тормозной контроллер 10 суммирует крутящий момент Tmr для подавления перемещения с требуемым тормозным крутящим моментом в соответствии с операцией водителя таким образом, чтобы корректировать целевой останавливающий крутящий момент Ts_t.
[0345] Он увеличивает фрикционный момент, как показано в пунктирных линиях по фиг. 24(i), который подавляет перемещение транспортного средства для электрического транспортного средства 100, как показано на фиг. 24(a) и (b).
[0346] Таким образом, когда флаг определения остановки транспортного средства равен 1, и флаг D/R-обнаружения равен 1, тормозной контроллер 10 настоящего варианта осуществления суммирует крутящий момент Tmr для подавления перемещения с требуемым тормозным крутящим моментом в соответствии с операцией водителя таким образом, чтобы вычислять целевой останавливающий крутящий момент Ts_t. Таким образом, когда перемещение останавливающегося электрического транспортного средства 100 обнаруживается, тормозной контроллер 10 увеличивает фрикционный момент до предварительно определенного значения.
[0347] Когда электрическое транспортное средство 100 останавливается на дороге с уклоном, ускорение/замедление электрического транспортного средства 100 равно 0 (нулю). Этот случай может не позволять корректно вычислять оцененное значение Td* градиентного крутящего момента. Таким образом, в случае если перемещение транспортного средства обнаруживается во время начала приведения в движение электрического транспортного средства 100, и когда целевой останавливающий крутящий момент Ts_t задается на основе оцененного значения Td* градиентного крутящего момента, тормозная сила, предоставленная в электрическое транспортное средство 100 в этом случае, является недостаточной, и электрическое транспортное средство 100 может перемещаться вниз.
[0348] Чтобы не допускать этого, тормозной контроллер 10 настоящего варианта осуществления выполнен с возможностью, когда перемещение остановленного электрического транспортного средства 100 обнаруживается, увеличивать фрикционный момент таким образом, что электрическое транспортное средство 100 надежно останавливается. Это быстро подавляет перемещение электрического транспортного средства 100.
[0349] Тормозной контроллер 10 настоящего варианта осуществления увеличивает вспомогательный тормозной крутящий момент BT_a, который должен суммироваться с крутящим моментом Tmr для подавления перемещения, в соответствии с величиной F перемещения транспортного средства для электрического транспортного средства 100. Это надежно подавляет перемещение электрического транспортного средства 100.
[0350] Тормозной контроллер 10 настоящего варианта осуществления выполнен с возможностью, когда электрическое транспортное средство 100 останавливается, обнаруживать переключение селектора выбора передач из P-диапазона в другой диапазон, к примеру, D-диапазон или R-диапазон, электрического транспортного средства 100. При обнаружении такого переключения позиции селектора выбора передач из P-диапазона в другой диапазон, тормозной контроллер 10 определяет то, что электрическое транспортное средство 100 может перемещаться, и увеличивает фрикционный момент на величину, соответствующую крутящему моменту Tmr для подавления перемещения.
[0351] Таким образом, когда переключение селектора выбора передач возникает во время остановки электрического транспортного средства, электрическое транспортное средство 100 может перемещаться. Тормозной контроллер в силу этого увеличивает фрикционный момент до предварительно определенного значения таким образом, чтобы корректно подавлять перемещение электрического транспортного средства 100. Это не допускает необязательного увеличенного фрикционного момента, который может создавать помехи плавному троганию с места электрического транспортного средства 100.
[0352] Пятый вариант осуществления
Фиг. 25 является блок-схемой последовательности операций способа, показывающей пример процедуры обработки подавления перемещения транспортного средства пятого варианта осуществления настоящего изобретения.
[0353] Обработка подавления перемещения транспортного средства настоящего варианта осуществления включает в себя этапы S996B и S997B вместо этапов S996 и S997 на фиг. 19. Поскольку другие этапы являются аналогичными этапам, описанным на фиг. 19, далее описываются только этапы S996B и S997B.
[0354] На этапе S996B, тормозной контроллер 10 выполняет обработку обнаружения переключения селектора выбора передач, чтобы обнаруживать перемещение селектора выбора передач. Это необходимо для того, чтобы определять то, требуется или нет обработка коррекции тормозной силы, на этапе S998. Тормозной контроллер 10 настоящего варианта осуществления обнаруживает то, возникает или нет перемещение позиции селектора выбора передач между D-диапазоном и R-диапазоном, и выполняет маскирование, чтобы подавлять обработку коррекции тормозной силы на этапе S998 в соответствии с результатом обнаружения.
[0355] Например, когда позиция селектора выбора передач перемещается между D-диапазоном и R-диапазоном, тормозной контроллер 10 определяет то, превышает или нет абсолютное значение скорости V транспортного средства предварительно определенное пороговое значение маски. Когда абсолютное значение скорости V транспортного средства превышает пороговое значение маски, то тормозной контроллер 10 задает флаг задания маски равным 1, и в противном случае задает флаг задания маски равным 0.
[0356] На этапе S997B, тормозной контроллер 10 определяет то, задается или нет флаг задания маски равным 1. Когда флаг задания маски задается равным 0, т.е. когда перемещение транспортного средства для электрического транспортного средства 100 обнаруживается, тормозной контроллер 10 переходит к этапу S998.
[0357] Когда флаг задания маски задается равным 1, тормозной контроллер 10 запрещает обработку на этапе S998. Это служит для того, чтобы не допускать продольной составляющей G, сформированной посредством крутого тормозного крутящего момента вследствие обработки коррекции тормозной силы на этапе S998. Затем тормозной контроллер 10 завершает обработку подавления перемещения транспортного средства.
[0358] Фиг. 26 является блок-схемой последовательности операций способа, показывающей пример процедуры обработки обнаружения переключения селектора выбора передач на этапе S996B.
[0359] На этапе S971, тормозной контроллер 10 получает информацию касательно транспортного средства, указывающую позицию селектора выбора передач в этот раз, позицию селектора выбора передач в прошлый раз и скорость V транспортного средства.
[0360] На этапе S972, тормозной контроллер 10 определяет то, отличается или нет позиция селектора выбора передач, полученная в этот раз, от позиции селектора выбора передач в прошлый раз, т.е. то, возникает или нет переключение селектора выбора передач.
[0361] Когда этот этап определяет то, что переключение селектора выбора передач не возникает, то тормозной контроллер 10 задает флаг задания маски равным 0 на этапе S978.
[0362] Когда этап определяет то, что переключение селектора выбора передач возникает, тормозной контроллер 10 обнаруживает ситуацию, когда продольная составляющая G легко возникает вследствие выполнения обработки коррекции тормозной силы на этапе S973. Тормозной контроллер 10 настоящего варианта осуществления определяет то, осуществляется или нет переключение селектора выбора передач из R-диапазона в D-диапазон.
[0363] Когда переключение селектора выбора передач осуществляется из R-диапазона в D-диапазон, тормозной контроллер 10 на этапе S974 определяет то, составляет либо нет скорость V транспортного средства пороговое значение D-маски или меньше, чтобы не допускать продольной составляющей G. Пороговое значение D-маски задается заранее на основе скорости транспортного средства, которая легко формирует продольную составляющую G вследствие обработки коррекции тормозной силы, и, например, получается посредством исследования или моделирования. В одном примере, пороговое значение D-маски задается равным 0 или положительному значению.
[0364] Когда скорость V транспортного средства составляет пороговое значение D-маски или меньше, тормозной контроллер 10 задает флаг задания маски равным 1 на этапе S975 таким образом, чтобы не допускать необязательной обработки коррекции тормозной силы.
[0365] Когда скорость V транспортного средства составляет пороговое значение D-маски или больше, тормозной контроллер 10 задает флаг задания маски равным 0 на этапе S979.
[0366] Когда переключение селектора выбора передач не осуществляется из R-диапазона в D-диапазон на этапе S973, тормозной контроллер 10 на этапе S976 определяет то, осуществляется или нет переключение селектора выбора передач из D-диапазона в R-диапазон, что представляет собой другую ситуацию, когда продольная составляющая G легко возникает. Когда переключение селектора выбора передач не осуществляется из D-диапазона в R-диапазон, тормозной контроллер 10 переходит к этапу S978.
[0367] Когда переключение селектора выбора передач осуществляется из D-диапазона в R-диапазон, тормозной контроллер 10 на этапе S977 определяет то, составляет либо нет скорость V транспортного средства пороговое значение R-маски или больше. Пороговое значение R-маски задается аналогично пороговому значению D-маски, как указано выше. В одном примере, пороговое значение R-маски задается равным 0 или отрицательному значению.
[0368] Когда скорость V транспортного средства составляет пороговое значение R-маски или больше, то тормозной контроллер 10 задает флаг задания маски равным 1. Когда скорость V транспортного средства меньше порогового значения R-маски, то тормозной контроллер 10 задает флаг задания маски равным 0. Когда этапы S975, S978 и S979 завершаются, последовательность обработки обнаружения переключения селектора выбора передач завершается.
[0369] Далее описывается работа электрического транспортного средства 100 настоящего варианта осуществления, со ссылкой на фиг. 27 и фиг. 28.
[0370] Фиг. 27 является временной диаграммой, описывающей один пример способа подавления перемещения транспортного средства для электрического транспортного средства 100, останавливающегося на дороге, идущей под спуск.
[0371] На фиг. 27(a)-(e), вертикальная ось представляет скорость V транспортного средства, величину F перемещения транспортного средства, крутящий момент Tmr для подавления перемещения, позицию AP акселератора и флаг определения остановки транспортного средства, соответственно, и горизонтальная ось представляет собой общую временную ось.
[0372] Во время t20, как показано на фиг. 27(a) и (d), как скорость V транспортного средства, так и позиция AP акселератора равны 0, и в силу этого обработка определения остановки транспортного средства, показанная на фиг. 20, задает флаг определения остановки транспортного средства равным 1, как показано на фиг. 27(e).
[0373] Во время t21, электрическое транспортное средство 100 перемещается в направлении переднего хода вследствие багажа на электрическом транспортном средстве 100, например, и в силу этого скорость V транспортного средства постепенно увеличивается, как показано на фиг. 27(a).
[0374] Во время t22, скорость V транспортного средства превышает пороговое значение Th_+ для переднего хода, как показано на фиг. 27(a), и в силу этого суммирование величины F перемещения транспортного средства начинается, как показано на фиг. 27(b).
[0375] Во время t23, величина F перемещения транспортного средства превышает пороговое значение Th_f, как показано на фиг. 27(b), и в силу этого обработка коррекции тормозной силы начинается. В частности, как показано на фиг. 27(c), обработка вычисляет крутящий момент Tmr для подавления перемещения и суммирует вычисленное значение с целевым останавливающим крутящим моментом Ts_t.
[0376] Величина F перемещения транспортного средства постепенно увеличивается, как показано на фиг. 27(b), и крутящий момент Tmr для подавления перемещения, соответственно, увеличивается таким образом, чтобы он соответствует величине F перемещения транспортного средства. Это увеличивает фрикционный момент, предоставленный в электрическое транспортное средство 100, что подавляет перемещение транспортного средства и уменьшает скорость V транспортного средства.
[0377] Во время t24, скорость V транспортного средства опускается ниже порогового значения Th_+ для переднего хода, как показано на фиг. 27(a), и в силу этого суммирование величины F перемещения транспортного средства прекращается, как показано на фиг. 27(b). После этого, скорость V транспортного средства становится равной 0, т.е. электрическое транспортное средство 100 останавливается, и фрикционный момент поддерживается таким образом, что он имеет суммированный крутящий момент Tmr для подавления перемещения.
[0378] Во время t25, как показано на фиг. 27(d), позиция AP акселератора превышает пороговое значение Th_dr для приведения в движение. Флаг определения остановки транспортного средства в силу этого задается равным 0, как показано на фиг. 27(e), и обработка коррекции тормозной силы прекращается. В частности, как показано на фиг. 27(c), крутящий момент Tmr для подавления перемещения задается равным 0 и уменьшается со скоростью отклика фрикционных тормозов 8a-8d.
[0379] Таким образом, когда перемещение транспортного средства возникает вследствие багажа на останавливающемся электрическом транспортном средстве 100, крутящий момент Tmr для подавления перемещения, который должен суммироваться с фрикционным моментом, увеличивается в соответствии с величиной F перемещения транспортного средства. Это надежно подавляет перемещение электрического транспортного средства.
[0380] Фиг. 28 является временной диаграммой, описывающей один пример способа подавления перемещения транспортного средства для электрического транспортного средства 100, останавливающегося на дороге, идущей под спуск.
[0381] На фиг. 28(a)-(g), вертикальная ось представляет скорость V транспортного средства, сигналы позиции селектора выбора передач, флаги задания маски, величину F перемещения транспортного средства, крутящий момент Tmr для подавления перемещения, позицию AP акселератора и флаг определения остановки транспортного средства, соответственно, и горизонтальная ось представляет собой общую временную ось.
[0382] Во время t30, водитель, например, временно останавливает электрическое транспортное средство 100. С этой целью, электрическое транспортное средство 100 движется передним ходом на низкой скорости, как показано на фиг. 28(a), (b) и (f).
[0383] Во время t31, водитель осуществляет приведение в движение электрического транспортного средства 100 назад. С этой целью, позиция AP акселератора, которая меньше порогового значения Th_dr для приведения в движение, уменьшается в большей степени, как показано на фиг. 28(a) и (f), таким образом, что скорость V транспортного средства опускается ниже порогового значения Th_st для остановки. Затем, как показано на фиг. 28(g), этап определения остановки транспортного средства по фиг. 20 задает флаг определения остановки транспортного средства равным 1.
[0384] Затем, как показано на фиг. 28(b), сигнал позиции селектора выбора передач переключается с D-диапазона в R-диапазон. Скорость V транспортного средства превышает пороговое значение R-маски, которое равно 0, как показано на фиг. 28(a), и в силу этого флаг задания маски задается равным 1, как показано на фиг. 28(c). Как показано на фиг. 28(c) и (d), это маскирует обработку коррекции тормозной силы даже во время перемещения электрического транспортного средства 100 в направлении, противоположном направлению движения, и в силу этого как величина F перемещения транспортного средства, так и крутящий момент Tmr для подавления перемещения задаются равными 0.
[0385] Во время t32, скорость V транспортного средства опускается ниже порогового значения R-маски, как показано на фиг. 28(a), и в силу этого флаг задания маски задается равным 0. Как показано на фиг. 28(a) и (f), позиция AP акселератора увеличивается в R-диапазоне, и скорость V транспортного средства увеличивается на отрицательной стороне. После этого, когда позиция AP акселератора становится равной 0, скорость V транспортного средства увеличивается на положительной стороне вследствие перемещения транспортного средства.
[0386] Во время t33, скорость V транспортного средства превышает 0, и в силу этого величина F перемещения транспортного средства увеличивается, как показано на фиг. 28(d). Во время t34, величина F перемещения транспортного средства превышает пороговое значение Th_f, и в силу этого крутящий момент Tmr для подавления перемещения увеличивается в соответствии с величиной F перемещения транспортного средства, как показано на фиг. 28(e). Это уменьшает скорость V транспортного средства, как показано на фиг. 28(a), и подавляет перемещение транспортного средства.
[0387] Во время t35, скорость V транспортного средства становится равной 0, как показано на фиг. 28(a). Затем суммирование величины F перемещения транспортного средства прекращается, как показано на фиг. 28(d), чтобы увеличивать крутящий момент Tmr для подавления перемещения.
[0388] Во время t36, как показано на фиг. 28(b) и (f), позиция AP акселератора превышает пороговое значение Th_dr для приведения в движение в D-диапазоне. Флаг определения остановки транспортного средства в силу этого переключается на 0, как показано на фиг. 28(f), и обработка коррекции тормозной силы прекращается.
[0389] Таким образом, когда позиция селектора выбора передач перемещается из D-диапазона в R-диапазон, и когда скорость V транспортного средства превышает предварительно определенное пороговое значение маски, обработка коррекции тормозной силы подавляется. Это не допускает внезапной остановки электрического транспортного средства 100 вследствие необязательной прикладываемой тормозной силы.
[0390] Тормозной контроллер 10 пятого варианта осуществления настоящего изобретения выполнен с возможностью, когда скорость V транспортного средства уменьшается до порогового значения Th_s для остановки транспортного средства в качестве предварительно определенного значения, увеличивать фрикционный момент, прикладываемый к электрическому транспортному средству 100 из фрикционных тормозов 8a-8d с увеличением величины перемещения электрического транспортного средства 100.
[0391] Например, тормозной контроллер 10 выполняет обработку коррекции тормозной силы на фиг. 23 и увеличивает крутящий момент Tmr для подавления перемещения, показанный на фиг. 27(c), с увеличением величины F перемещения транспортного средства, показанной на фиг. 27(b). Это подавляет перемещение электрического транспортного средства 100 в направлении, противоположном направлению движения.
[0392] Тормозной контроллер 10 может увеличивать фрикционный момент в соответствии с величиной перемещения от времени, когда электрическое транспортное средство 100 уменьшается до порогового значения Th_s для остановки транспортного средства. Этот случай также останавливает электрическое транспортное средство 100 быстро, когда электрическое транспортное средство перемещается в направлении, идентичном направлению движения.
[0393] Тормозной контроллер 10 настоящего варианта осуществления выполнен с возможностью, когда перемещение электрического транспортного средства 100 обнаруживается после остановки электрического транспортного средства 100, увеличивать фрикционный момент в соответствии с величиной F перемещения транспортного средства. Например, как описано выше ссылаясь на фиг. 27, когда флаг определения остановки транспортного средства задается равным 1, и величина F перемещения транспортного средства превышает пороговое значение Th_f, тормозной контроллер 10 определяет то, что транспортное средство перемещается, и затем увеличивает крутящий момент Tmr для подавления перемещения.
[0394] Это обеспечивает возможность электрическому транспортному средству 100 останавливаться быстро, даже когда багаж размещен на электрическом транспортном средстве 100 во время остановки на дороге с уклоном, и в силу этого электрическое транспортное средство 100 может перемещаться.
[0395] Фиг. 27 описывает пример увеличения фрикционного момента, когда электрическое транспортное средство 100 может перемещаться в направлении, идентичном направлению движения. Также для перемещения электрического транспортного средства 100 в направлении, противоположном направлению движения, аналогично может увеличиваться фрикционный момент, предоставленный в электрическое транспортное средство.
[0396] Когда электрическое транспортное средство 100 перемещается в направлении, противоположном направлению движения 100, как указано выше, по меньшей мере, одно из величины увеличения и степени увеличения фрикционного момента предпочтительно превышает величину увеличения и степень увеличения в случае перемещения электрического транспортного средства 100 в направлении, идентичном направлению движения. Это останавливает электрическое транспортное средство 100 быстро, когда электрическое транспортное средство 100 перемещается в направлении, противоположном направлению движения 100, и останавливает электрическое транспортное средство 100 плавно, когда электрическое транспортное средство 100 перемещается в направлении, идентичном направлению движения.
[0397] Тормозной контроллер 10 настоящего варианта осуществления выполнен с возможностью, когда селектор выбора передач электрического транспортного средства 100 перемещается между D-диапазоном и R-диапазоном, подавлять увеличение фрикционного момента. Например, когда селектор выбора передач переключается с D-диапазона в R-диапазон во время t31, как описано со ссылкой на фиг. 28, тормозной контроллер 10 задает флаг задания маски равным 1, чтобы запрещать увеличение фрикционного момента.
[0398] Это запрещает увеличение фрикционного момента, когда селектор выбора передач переключается между D-диапазоном и R-диапазоном, и когда электрическое транспортное средство 100 также перемещается в направлении, противоположном направлению движения, и за счет этого подавляет необязательное увеличение фрикционного момента.
[0399] Вышеописанные варианты осуществления настоящего изобретения представляют собой просто часть примеров варианта применения настоящего изобретения, и объем настоящего изобретения не ограничен конкретными структурами вышеописанных вариантов осуществления.
[0400] Вышеописанные варианты осуществления управляют мотором 4 и фрикционными тормозами 8a-8d отдельно с помощью как контроллера 2 мотора, так и тормозного контроллера 10. В другом варианте осуществления, как мотор, так и фрикционные тормоза могут управляться с помощью одного из контроллеров, или часть управления с помощью контроллера 2 мотора может реализовываться с помощью тормозного контроллера 10. Часть управления с помощью тормозного контроллера 10 может реализовываться с помощью контроллера 2 мотора.
[0401] Настоящая заявка испрашивает приоритет заявки на патент (Япония) № 2017-010565, поданной в патентное бюро Японии 24 января 2017 года, содержимое которой полностью содержится в данном документе по ссылке.
Реферат
Группа изобретений относится к устройству и способу управления транспортным средством. Устройство содержит: мотор, фрикционный тормозной механизм и контроллер. Мотор предоставляет движущую/тормозную силу. Фрикционный тормозной механизм предоставляет фрикционную тормозную силу. Контроллер оценивает градиентный крутящий момент для того, чтобы подавлять возмущения, действующие на транспортное средство; вычисляет значение команды управления крутящим моментом мотора на основе целевого и градиентного крутящих моментов и смещения педали акселератора; управляет мотором в соответствии со значением команды управления крутящим моментом. Контроллер определяет, останавливается или нет транспортное средство; управляет остановкой для изменения тормозного крутящего момента с крутящего момента мотора на фрикционный момент. Во время остановки тормозной крутящий момент задается равным значению, превышающему градиентный крутящий момент; при этом увеличивает степень повышения давления текучей среды, подающейся во фрикционный тормозной механизм, до тех пор, пока фрикционный момент не достигнет значения в соответствии с увеличением времени, истекшего после упомянутого определения или значения в соответствии с уменьшением скорости транспортного средства. Достигается повышение эффективности торможения за счет учета градиента поверхности дороги. 4 н. и 15 з.п. ф-лы, 28 ил.
Комментарии