Устройство управления приводом электрического транспортного средства и способ управления приводом электрического транспортного средства - RU2697355C1
Код документа: RU2697355C1
Чертежи



















Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления для электрического транспортного средства и к способу управления для электрического транспортного средства.
Уровень техники
[0002] Тормозная сила, используемая, когда электрическое транспортное средство замедляется или останавливается, получается из рекуперативного торможения посредством мотора и фрикционного торможения посредством тормоза. Рекуперативное торможение имеет лучшую контролируемость тормозной силы, чем контролируемость фрикционного торможения. Таким образом, чтобы плавно останавливать электрическое транспортное средство, предпочтительно останавливать транспортное средство посредством рекуперативного торможения, а не посредством фрикционного торможения. В частности, в транспортном средстве, которое выполняет приведение в действие и торможение от мотора согласно степени открытия педали акселератора, необходимо останавливать транспортное средство посредством регулирования тормозной силы согласно возмущениям. Таким образом, предпочтительно выполнять рекуперативное торможение, имеющее хорошую контролируемость непосредственно перед остановкой транспортного средства.
[0003] Тем не менее традиционно, если рекуперативное торможение выполняется, когда аккумулятор находится в состоянии полного заряда, аккумулятор возможно чрезмерно заряжается. Таким образом, когда аккумулятор находится в состоянии полного заряда, электрическое транспортное средство останавливается посредством фрикционного торможения, а не рекуперативного торможения (JP2012-29461A).
Сущность изобретения
[0004] В той мере, в какой аккумулятор находится в состоянии полного заряда, если рекуперативное торможение выполняется, аккумулятор чрезмерно заряжается. Таким образом, должно выполняться фрикционное торможение. Следовательно, имеется проблема в том, что электрическое транспортное средство не может плавно останавливаться.
[0005] Задача настоящего изобретения заключается в том, чтобы предоставлять технологию, которая разрешает такую проблему, что электрическое транспортное средство не может плавно останавливаться, когда аккумулятор находится в состоянии полного заряда.
[0006] Согласно одному варианту осуществления настоящего изобретения, предоставляется устройство управления для электрического транспортного средства, которое формирует тормозную силу согласно степени открытия педали акселератора, чтобы замедлять электрическое транспортное средство. Устройство управления для электрического транспортного средства, содержащее: мотор, выполненный с возможностью формировать движущую силу или рекуперативную тормозную силу электрического транспортного средства; модуль фрикционного торможения, выполненный с возможностью формировать фрикционную тормозную силу; и контроллер, выполненный с возможностью управлять, по меньшей мере, одним из мотора и модуля фрикционного торможения согласно степени открытия педали акселератора. Контроллер определяет то, потребляется или нет вся рекуперативная электрическая мощность, вырабатываемая посредством мотора, в электрическом транспортном средстве, когда тормозная сила формируется только посредством мотора, и формирует рекуперативную тормозную силу посредством мотора, когда контроллер определяет то, что вся рекуперативная электрическая мощность потребляется в электрическом транспортном средстве.
Краткое описание чертежей
[0007] Фиг. 1 является схемой принципиальной конфигурации электрического транспортного средства, включающего в себя контроллер мотора первого варианта осуществления.
Фиг. 2A является видом, иллюстрирующим модель транспортного средства.
Фиг. 2B является видом, иллюстрирующим модель транспортного средства.
Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей управление движением электрического транспортного средства.
Фиг. 4 является видом, иллюстрирующим примерную таблицу крутящих моментов.
Фиг. 5 является блок-схемой, иллюстрирующей процесс управления остановкой.
Фиг. 6 является блок-схемой, иллюстрирующей процесс в блоке задания крутящего F/B-момента по частоте вращения мотора.
Фиг. 7 является блок-схемой, иллюстрирующей процесс в блоке оценки возмущающего крутящего момента.
Фиг. 8 является блок-схемой последовательности операций способа, иллюстрирующей управление вычислением значений команд управления.
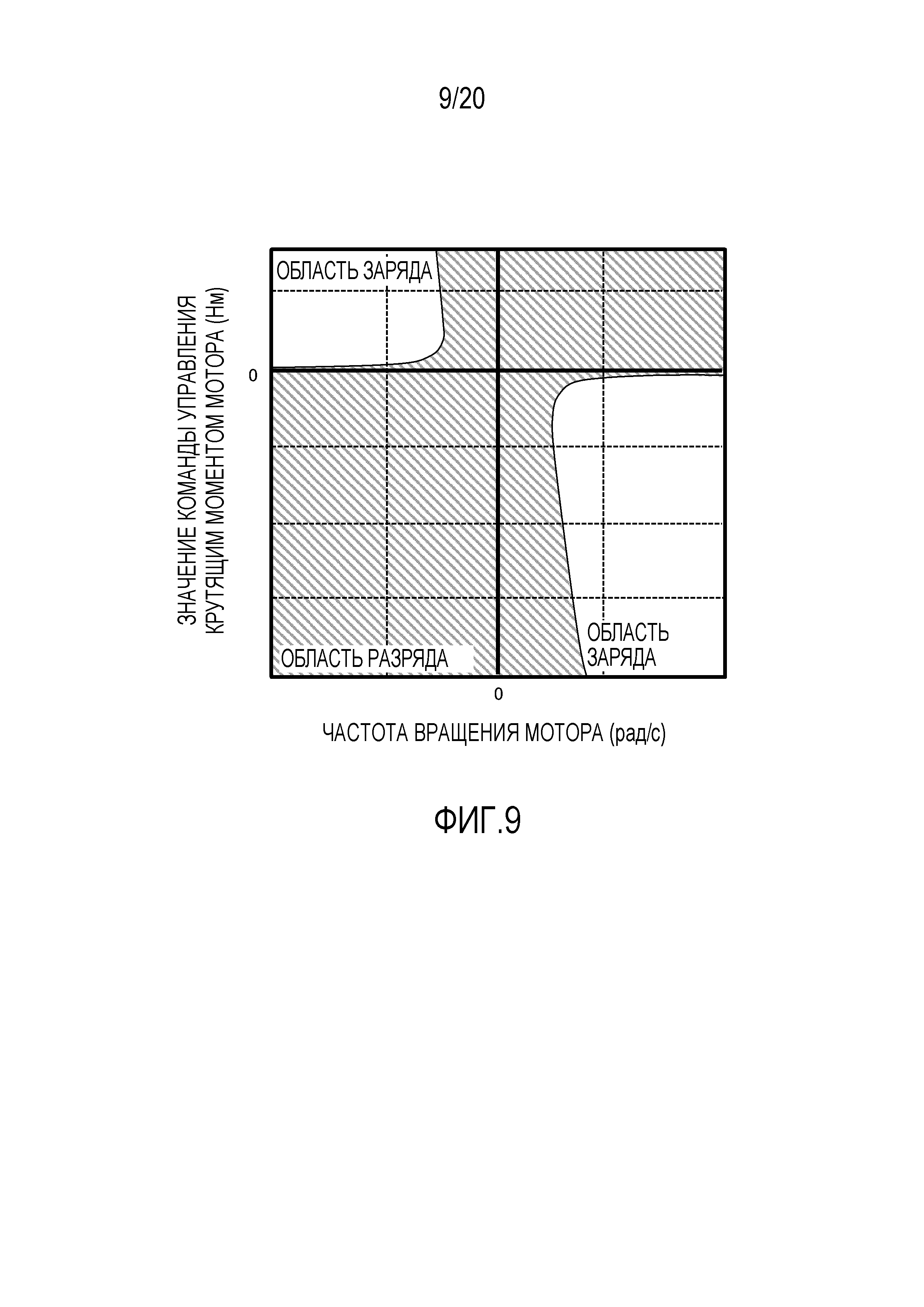
Фиг. 9 является видом, иллюстрирующим примерную таблицу зарядных токов.
Фиг. 10 является блок-схемой, иллюстрирующей процесс фильтрации.
Фиг. 11 являются временными диаграммами, иллюстрирующими примерный режим движения электрического транспортного средства.
Фиг. 12 является таблицами зарядных токов, иллюстрирующими операции электрического транспортного средства во временных диаграммах на фиг. 11.
Фиг. 13 является временными диаграммами, иллюстрирующими другой примерный режим движения электрического транспортного средства.
Фиг. 14 является таблицами зарядных токов, иллюстрирующими операции электрического транспортного средства во временных диаграммах на фиг. 13.
Фиг. 15 является схемой принципиальной конфигурации электрического транспортного средства, включающего в себя контроллер мотора второго варианта осуществления.
Фиг. 16 является блок-схемой, иллюстрирующей процесс управления остановкой.
Фиг. 17 является блок-схемой последовательности операций способа, иллюстрирующей управление вычислением значений команд управления.
Фиг. 18 является таблицей зарядных токов, иллюстрирующей работу электрического транспортного средства.
Фиг. 19 является блок-схемой последовательности операций способа, иллюстрирующей управление вычислением значений команд управления, выполняемое посредством контроллера мотора третьего варианта осуществления.
Фиг. 20 является таблицей зарядных токов, иллюстрирующей работу электрического транспортного средства.
Подробное описание вариантов осуществления
[0008] Далее описываются варианты осуществления настоящего изобретения со ссылкой на чертежи.
[0009] Первый вариант осуществления
Фиг. 1 является схемой принципиальной конфигурации электрического транспортного средства 100, которое включает в себя контроллер 14 мотора в качестве устройства управления согласно первому варианту осуществления.
[0010] Электрическое транспортное средство 100 включает в себя мотор 1 в качестве части или всего источника приведения в движение. В этом варианте осуществления, предполагается, что мотор 1, смонтированный на электрическом транспортном средстве 100, работает в трех фазах (U-, V- и W-фазы). Следует отметить, что электрическое транспортное средство 100 может представлять собой электрическое транспортное средство, которое использует электромотор в качестве источника приведения в движение, и гибридное транспортное средство, которое использует электромотор и двигатель в качестве источников приведения в движение.
[0011] Электрическое транспортное средство 100 согласно варианту осуществления может выполнять ускорение и замедление и останавливаться только посредством нажатия педали акселератора. Таким образом, крутящий момент приведения в движение и рекуперативный крутящий момент, сформированные посредством мотора 1, определяются согласно степени открытия педали акселератора. Следовательно, увеличение степени открытия педали акселератора увеличивает крутящий момент приведения в движение, сформированный посредством мотора 1, ускоряя электрическое транспортное средство 100. Дополнительно, уменьшение степени открытия педали акселератора уменьшает крутящий момент приведения в движение, сформированный посредством мотора 1, или увеличивает рекуперативную тормозную силу посредством мотора 1 и фрикционную тормозную силу посредством модуля 7 фрикционного торможения, замедляя или останавливая электрическое транспортное средство 100. Следует отметить, что хотя электрическое транспортное средство 100 может включать в себя педаль тормоза, педаль тормоза используется в случае, если требуется тормозная сила, превышающая тормозную силу, сформированную, когда степень открытия педали акселератора становится нулевой.
[0012] Электрическое транспортное средство 100 включает в себя мотор 1, аккумулятор 2, инвертор 3, редукторную шестерню 4, вал 5, ведущие колеса 6, модуль 7 фрикционного торможения, датчик 8 напряжения, датчик 9 тока, датчик 10 вращения, датчик 11 давления жидкости, контроллер 12 фрикционного тормоза, контроллер 13 аккумулятора и контроллер 14 мотора.
[0013] Мотор 1 включает в себя вращатель, который работает посредством трехфазных электрических мощностей (U-, V- и W-фаз). В моторе 1, протекание трехфазных переменных токов iu, iv и iw из аккумулятора 2 в инвертор 3 формирует крутящий момент согласно переменным токам iu, iv и iw. Крутящий момент, сформированный в моторе 1, передается на ведущие колеса 6 через редукторную шестерню 4 и вал 5. Мотор 1 выполняет рекуперативное торможение, чтобы замедлять или останавливать электрическое транспортное средство 100. Рекуперативное торможение посредством мотора 1 вырабатывает рекуперативную электрическую мощность, и аккумулятор 2 заряжается посредством рекуперативной электрической мощности. Следует отметить, что рекуперативная электрическая мощность, вырабатываемая посредством мотора 1, представляет собой мощность переменного тока.
[0014] Аккумулятор 2 представляет собой аккумулятор, который может заряжаться и разряжаться, к примеру, литиевый аккумулятор. Электрическая мощность постоянного тока, подаваемая из аккумулятора 2, преобразуется в мощность переменного тока посредством инвертора 3, и эта мощность переменного тока подается в мотор 1. Аккумулятор 2 заряжается не только в зарядной станции, но также и заряжается посредством рекуперативной электрической мощности, вырабатываемой в моторе 1 в то время, когда электрическое транспортное средство 100 замедляется. Датчик 8 напряжения располагается между аккумулятором 2 и инвертором 3.
[0015] Инвертор 3 преобразует постоянный ток, выводимый из аккумулятора 2, в три переменных тока iu, iv и iw согласно скважности импульсов (%) PWM-сигналов Tu, Tv и Tw, выводимых из контроллера 14 мотора. Инвертор 3 подает переменные токи iu, iv и iw преобразования в мотор 1. Следует отметить, что в случае, если мотор 1 вырабатывает рекуперативную электрическую мощность и выводит переменный ток, инвертор 3 преобразует переменный ток в постоянный ток и выводит преобразованный постоянный ток в аккумулятор 2. Датчик 9 тока располагается между инвертором 3 и мотором 1.
[0016] Инвертор 3, например, включает в себя два фрагмента переключающих элементов (не проиллюстрированы), которые предоставляются согласно каждой из U-, V- и W-фаз. В инверторе 3, согласно скважности импульсов PWM-сигналов Tu, Tv и Tw, переключается включение и выключение переключающих элементов. Постоянный ток, подаваемый из аккумулятора 2 посредством переключения переключающих элементов, преобразуется в требуемые переменные токи iu, iv и iw, и переменные токи iu, iv и iw подаются в мотор 1.
[0017] Следует отметить, что в качестве переключающих элементов, предусмотрено силовое полупроводниковое устройство, к примеру, биполярный транзистор с изолированным затвором (IGBT) и полевой транзистор со структурой "металл-оксид-полупроводник" (MOSFET).
[0018] Редукторная шестерня 4 преобразует крутящий момент, сформированный в моторе 1, и передает преобразованный крутящий момент в вал 5. Отношение, с которым частота вращения мотора 1 преобразуется в частоту вращения вала 5, упоминается как конечное передаточное отношение. Таким образом, редукторная шестерня 4 преобразует частоту вращения мотора 1 в частоту вращения вала 5 согласно конечному передаточному отношению.
[0019] Вал 5 вращается посредством крутящего момента, передаваемого из мотора 1 через редукторную шестерню 4.
[0020] Ведущие колеса 6 монтируются на обоих концах вала 5 и вращаются в соответствии с вращением вала 5. Таким образом, вращение ведущих колес 6 заставляет электрическое транспортное средство 100 двигаться.
[0021] Модуль 7 фрикционного торможения выполняет фрикционное торможение и располагается рядом с ведущим колесом 6. Модуль 7 фрикционного торможения и контроллер 12 фрикционного тормоза, например, соединены через масляный канал с использованием масла. Модуль 7 фрикционного торможения формирует фрикционную тормозную силу согласно давлению жидкости масляного канала между модулем 7 фрикционного торможения и контроллером 12 фрикционного тормоза.
[0022] Датчик 9 тока измеряет трехфазные переменные токи iu, iv и iw, подаваемые из инвертора 3 в мотор 1. Датчик 9 тока выводит измеренные трехфазные переменные токи iu, iv и iw в контроллер 14 мотора.
[0023] Датчик 10 вращения представляет собой, например, круговой датчик позиции и датчик позиции, который определяет фазу α вращателя (рад), фазу вращателя мотора 1. Датчик 10 вращения выводит определенную фазу α вращателя в контроллер 14 мотора.
[0024] Датчик 11 давления жидкости измеряет давление жидкости модуля 7 фрикционного торможения.
[0025] Контроллер 12 фрикционного тормоза получает значение команды управления давлением жидкости из ввода значения Tb* команды управления крутящим моментом трения из контроллера 14 мотора в, и давления тормозной жидкости из датчика 11 давления жидкости. Контроллер 12 фрикционного тормоза управляет давлением жидкости масляного канала между модулем 7 фрикционного торможения и контроллером 12 фрикционного тормоза согласно полученному значению команды управления давлением жидкости.
[0026] Контроллер 13 аккумулятора отслеживает состояние аккумулятора 2, чтобы получать состояние заряда (SOC) (%), указывающее оставшуюся величину заряда аккумулятора 2. Контроллер 13 аккумулятора получает рекуперативную электрическую мощность Pin (Вт) из SOC аккумулятора 2 и температуры. Контроллер 13 аккумулятора выводит полученную рекуперативную электрическую мощность Pin в контроллер 14 мотора. Следует отметить, что рекуперативная электрическая мощность Pin становится нулевым или положительным значением. Следует отметить, что вместо SOC может использоваться глубина разряда (DOD), указывающая отношение разряда относительно емкости.
[0027] В контроллер 14 мотора, вводятся скорость V транспортного средства для электрического транспортного средства 100 из датчика скорости транспортного средства (не проиллюстрирован), позиция θ акселератора (степень открытия акселератора) из датчика позиции акселератора (не проиллюстрирован), который измеряет величину нажатия педали акселератора, значение Vdc постоянного напряжения из датчика 8 напряжения, трехфазные переменные токи iu, iv и iw из датчика 9 тока, фаза α вращателя мотора 1 из датчика 10 вращения, давление тормозной жидкости из датчика 11 давления жидкости и SOC и рекуперативная электрическая мощность Pin из контроллера 13 аккумулятора. Контроллер 14 мотора выводит PWM-сигналы Tu, Tv и Tw в инвертор 3 через схему приведения в действие на основе этих вводов и выводит значение Tb* команды управления крутящим моментом трения в контроллер 12 фрикционного тормоза. Ниже описываются подробные операции контроллера 14 мотора. Следует отметить, что с учетом рекуперативного торможения посредством мотора 1 и скорости отклика фрикционного торможения посредством модуля 7 фрикционного торможения, контроллер 14 мотора управляет значением команды управления крутящим моментом.
[0028] Далее описываются передаточные функции в модели транспортного средства, в которой моделируется система трансмиссии с приводом электрического транспортного средства 100, используемые в процессах посредством контроллера 14 мотора. Передаточные функции Gp(s), Gb(s), Gpa(s) и Gba(s) используются для процессов посредством контроллера 14 мотора.
[0029] Передаточная функция Gp(s) указывает передаточные характеристики из ввода крутящего момента Tm мотора, сформированного посредством мотора 1, в вывод частоты ωm вращения мотора качестве частоты вращения мотора 1.
[0030] Передаточная функция Gb(s) указывает передаточные характеристики из ввода крутящего момента Tb трения, сформированного в модуле 7 фрикционного торможения, в вывод частоты ωm вращения мотора.
[0031] Передаточная функция Gpa(s) указывает передаточные характеристики из ввода крутящего момента Tm мотора в вывод ускорения a электрического транспортного средства 100.
[0032] Передаточная функция Gba(s) указывает передаточные характеристики из ввода крутящего момента Tb трения в вывод ускорения a электрического транспортного средства 100.
[0033] Далее описываются эти передаточные функции со ссылкой на фиг. 2A и фиг. 2B.
[0034] Фиг. 2A и фиг. 2B являются видами, иллюстрирующими модель транспортного средства, в которой моделируется система трансмиссии для передачи движущей силы электрического транспортного средства 100. Соответствующие параметры на этих видах являются следующими:
Jm - инерция мотора 1
Jw - инерция ведущих колес 6
M - вес электрического транспортного средства 100
KD - крутильная жесткость приводной системы
Kt - коэффициент трения между шинами и поверхностью дороги
N - полное передаточное отношение
r - динамический радиус шин
ωm - частота вращения мотора для мотора 1
Tm - крутящий момент мотора
TD - крутящий момент ведущих колес 6
F - сила, прикладываемая к электрическом транспортному средству 100
V - скорость электрического транспортного средства 100
ωw - угловая скорость ведущих колес 6
Tb - величина фрикционного торможения, сформированного в модуле 7 фрикционного торможения (крутящий момент преобразования вала мотора).
Следует отметить, что следующие уравнения движения в виде уравнений (1)-(5) могут извлекаться из фиг. 2A и фиг. 2B. Параметры со звездочками (*), присоединяемыми справа вверху в следующих уравнениях (1)-(3), указывают то, что параметры имеют дифференцированные во времени значения.
[0035] уравнение 1

[0036] уравнение 2

[0037] уравнение 3

[0038] уравнение 4

[0039] уравнение 5

[0040] Здесь, когда угловая скорость ωw ведущих колес 6 больше нуля (ωw>0), т.е. в то время, когда электрическое транспортное средство 100 движется передним ходом, величина Tb фрикционного торможения становится положительной (Tb>0). Когда угловая скорость ωw ведущих колес 6 меньше нуля (ωw<0), т.е. в то время, когда электрическое транспортное средство 100 едет задним ходом, величина Tb фрикционного торможения становится отрицательной (Tb<0). Когда угловая скорость ωw ведущих колес 6 равна нулю (ωw=0) т.е. в то время, когда электрическое транспортное средство 100 останавливается, величина Tb фрикционного торможения становится нулевой (Tb=0).
[0041] Из уравнений движения в виде уравнений (1)-(5), передаточная функция Gp(s) получается в качестве уравнения (6). Передаточная функция Gb(s) получается в качестве уравнения (7).
[0042] уравнение 6

[0043] уравнение 7

[0044] Следует отметить, что соответствующие параметры в уравнениях (6) и (7) выражаются следующим образом.
[0045] уравнение 8

[0046] Посредством исследований, полюса и нулевые точки передаточной функции, показанной в уравнении (6), могут быть аппроксимированы в передаточную функцию следующего уравнения (8), и один полюс и одна нулевая точка указывают значения, чрезвычайно близкие друг к другу. Это является эквивалентным тому, что α и β уравнения (8) указывают значения, чрезвычайно близкие друг к другу.
[0047] уравнение 9

[0048] Соответственно, посредством выполнения отмены нулей и полюсов (аппроксимации для α=β) в уравнении (8), составляются передаточные характеристики Gp(s) (второй порядок)/(третий порядок), как показано в следующем уравнении (9).
[0049] уравнение 10

[0050] Из уравнений движения в виде уравнений (1)-(5), передаточная функция Gpa(s) получается в качестве уравнения (10), и передаточная функция Gba(s) получается в качестве уравнения (11).
[0051] уравнение 11

[0052] уравнение 12

[0053] Следует отметить, что соответствующие параметры в уравнениях (10) и (11) выражаются посредством следующего уравнения.
[0054] уравнение 13

[0055] Таким образом, могут получаться передаточные функции Gp(s), Gb(s), Gpa(s) и Gba(s).
[0056] Далее описывается управление посредством контроллера 14 мотора.
[0057] Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей управление движением электрического транспортного средства 100 посредством контроллера 14 мотора. Это управление движением многократно выполняется в предварительно определенное время.
[0058] На S301, выполняется обработка ввода в контроллер 14 мотора. Как проиллюстрировано на фиг. 1, в контроллер 14 мотора, вводятся значение Vdc постоянного напряжения (В), рекуперативная электрическая мощность Pin (Вт), величина Tb фрикционного торможения, скорость V транспортного средства (м/с), позиция θ акселератора (%), фаза α вращателя (рад) и трехфазные переменные токи iu, iv и iw(а).
[0059] Значение Vdc постоянного напряжения вводится из датчика 8 напряжения в контроллер 14 мотора.
[0060] Рекуперативная электрическая мощность Pin вводится из контроллера 13 аккумулятора в контроллер 14 мотора. Эта рекуперативная электрическая мощность Pin, имеющая значение, отличное от 0, указывает то, что аккумулятор 2 имеет доступную емкость. Рекуперативная электрическая мощность Pin становится большей по мере того, как возрастает доступная емкость.
[0061] Фаза α вращателя вводится из датчика 10 вращения в контроллер 14 мотора.
[0062] Позиция θ акселератора вводится через средство связи из датчика позиции акселератора или другого контроллера. В этом варианте осуществления, предполагается, что позиция θ акселератора является значением с приращениями в 1/4 (25%). Таким образом, позиция θ акселератора выражается посредством пяти уровней 0/4 (0%), 1/4 (25%), 2/4 (50%), 3/4 (75%) и 4/4 (100%). При позиции θ акселератора в 0/4 (0%), педаль акселератора является полностью закрытой, т.е. педаль акселератора вообще не нажимается. При позиции θ акселератора в 4/4 (100%), педаль акселератора является полностью нажатой, т.е. педаль акселератора полностью нажимается. Следует отметить, что позиция θ акселератора не является значением с приращениями в 1/4 (25%) и, например, может составлять значение с приращениями в 1%.
[0063] Трехфазные переменные токи iu, iv и iw вводятся из датчика 9 тока в контроллер 14 мотора. Следует отметить, что поскольку трехфазные переменные токи iu, iv и iw имеют такой признак, что их сумма становится равной 0, датчик 9 тока может определять токи любых данных двух фаз, и контроллер 14 мотора может получать ток из одной оставшейся фазы за счет работы.
[0064] Скорость V транспортного средства вводится из датчика скорости транспортного средства в контроллер 14 мотора. Скорость V транспортного средства может вводиться через средство связи из другого контроллера, к примеру, контроллера 12 фрикционного тормоза.
[0065] Скорость V транспортного средства может получаться с использованием фазы α вращателя мотора 1, измеряемой посредством датчика 10 вращения. В частности, дифференцирование фазы α вращателя в качестве электрического угла позволяет получать угловую скорость ω (рад/с) электрического угла вращателя мотора 1. Деление угловой скорости ω электрического угла вращателя на номер полюсной пары, который является числом пар магнитных полюсов, предоставленных посредством мотора 1, позволяет получать частоту ωm вращения мотора (рад/с) в качестве механического угла. Умножение частоты ωm вращения мотора на динамический радиус r (м) ведущих колес 6 и деление найденного значения на конечное передаточное отношение редукторной шестерни 4 позволяет получать скорость v транспортного средства (м/с). Далее, умножение скорости v транспортного средства (м/с) на коэффициент преобразования единиц измерения (3600/1000) позволяет получать скорость V транспортного средства (км/ч). Следует отметить, что умножение частоты ωm вращения мотора (рад/с) на коэффициент преобразования единиц измерения (60/2 π) позволяет получать частоту Nm вращения (об/мин) мотора 1.
[0066] На этапе S302, контроллер 14 мотора выполняет процесс вычисления значения Tm1* первого целевого крутящего момента. Значение Tm1* первого целевого крутящего момента получается из операции нажатия педали акселератора водителем и текущей скорости электрического транспортного средства 100 и является значением команды управления, которое инструктирует мотору 1 формировать крутящий момент, при котором электрическое транспортное средство 100 переключается на требуемую скорость. На S302, используется таблица крутящих моментов, проиллюстрированная на фиг. 4.
[0067] Фиг. 4 является видом, иллюстрирующим примерную таблицу крутящих моментов в зависимости от позиции акселератора. С использованием этой таблицы крутящих моментов, значение целевого крутящего момента, при котором получается требуемая скорость, получается из частоты вращения мотора согласно состоянию движения электрического транспортного средства 100 и позиции акселератора согласно операции водителя. Фиг. 4 иллюстрирует взаимосвязь между частотой ωm вращения мотора и значением Tm целевого крутящего момента в соответствующих случаях позиции акселератора, составляющей 0/4 (0%), 1/4 (25%), 2/4 (50%), 3/4 (75%) и 4/4 (100%).
[0068] Контроллер 14 мотора получает частоту ωm вращения мотора посредством деления дифференцированной фазы α вращателя на номер полюсной пары. С использованием таблицы крутящих моментов на фиг. 4, контроллер 14 мотора обращается к значению Tm целевого крутящего момента при позиции θ акселератора, вводимой на S301, и к полученной частоте ωm вращения мотора, чтобы получать значение Tm1* первого целевого крутящего момента.
[0069] Следует отметить, что поскольку электрическое транспортное средство 100 выполняет ускорение и замедление и остановку транспортного средства только посредством операции нажатия педали акселератора, электрическое транспортное средство 100 замедляется с полностью закрытой педалью акселератора. Следует отметить, что как описано выше, хотя может иметь место то, что электрическое транспортное средство 100 включает в себя педаль тормоза, даже если педаль тормоза не нажимается, электрическое транспортное средство 100 может замедляться и останавливаться только посредством операции нажатия педали акселератора. Соответственно, на фиг. 4, при позиции акселератора в 0/4 (полностью закрыта), отрицательное значение главным образом задается равным значению Tm целевого крутящего момента. Следует отметить, что таблица крутящих моментов может представлять собой другую таблицу, отличную от фиг. 4.
[0070] Снова ссылаясь на фиг. 3, далее описываются процессы после S302.
[0071] На этапе S303, контроллер 14 мотора выполняет процесс управления остановкой. В процессе управления остановкой, контроллер 14 мотора определяет то, находится или нет электрическое транспортное средство 100 в момент времени непосредственно перед остановкой транспортного средства. Когда электрическое транспортное средство 100 находится в момент до момента непосредственно перед остановкой транспортного средства, значение Tm1* первого целевого крутящего момента, вычисленное на S302, задается равным значению Tm3* третьего целевого крутящего момента. Когда электрическое транспортное средство 100 находится в момент после момента непосредственно перед остановкой транспортного средства, значение Tm2* второго целевого крутящего момента, сходящееся к оцененному значению Td возмущающего крутящего момента, определенному посредством средства оценки возмущающего крутящего момента в качестве уменьшения частоты вращения мотора, задается равным значению Tm3* третьего целевого крутящего момента. На основе значения Tm3* третьего целевого крутящего момента, вычисляются значение Tm* команды управления крутящим моментом мотора и значение Tb* команды управления крутящим моментом трения. Следует отметить, что ниже описываются подробности процесса управления остановкой со ссылкой на фиг. 5-10.
[0072] На этапе S304, контроллер 14 мотора использует значение Tm* команды управления крутящим моментом мотора, вычисленное на S303, чтобы получать PWM-сигналы Tu, Tv и Tw, выводимые в инвертор 3. Следует отметить, что для вычисления PWM-сигналов, используемых для того, чтобы управлять мотором 1, используется координата синхронного вращения, состоящая из d-оси и q-оси.
[0073] В частности, контроллер 14 мотора использует значение Vdc постоянного напряжения, вводимое на S301, частоту ωm вращения мотора, полученную на S302, и значение Tm* команды управления крутящим моментом мотора, вычисленное на S303, чтобы получать целевое значение id* тока d-оси и целевое значение iq* тока q-оси, указываемые посредством координаты синхронного вращения, в качестве целевого значения тока, подаваемого в мотор 1.
[0074] Следует отметить, что контроллер 14 мотора предварительно сохраняет таблицу, показывающую взаимосвязь между значением Vdc постоянного напряжения, частотой ωm вращения мотора и значением Tm* команды управления крутящим моментом мотора и целевым значением id* тока d-оси и целевым значением iq* тока q-оси. Обращаясь к этой таблице, контроллер 14 мотора может получать целевое значение id* тока d-оси и целевое значение iq* тока q-оси из значения Vdc постоянного напряжения, частоты ωm вращения мотора и значения Tm* команды управления крутящим моментом мотора.
[0075] На этапе S305, контроллер 14 мотора использует целевое значение id* тока d-оси и целевое значение iq* тока q-оси, полученные на S304, для того чтобы получать PWM-сигналы Tu, Tv и Tw. Контроллер 14 мотора выводит PWM-сигналы Tu, Tv и Tw в инвертор 3 и выводит значение Tb* команды управления крутящим моментом трения, полученное на S303, в контроллер 12 фрикционного тормоза. Далее подробно описывается процесс, в котором контроллер 14 мотора получает PWM-сигналы Tu, Tv и Tw.
[0076] Во-первых, контроллер 14 мотора преобразует трехфазный переменный ток iu, iv и iw, вводимый на S301, в величину id тока d-оси и величину iq тока q-оси на основе фазы α вращателя мотора 1. Контроллер 14 мотора получает значение vd команды управления напряжением d-оси из отклонения между целевым значением id* тока d-оси и величиной id тока d-оси и получает значение vq команды управления напряжением q-оси из отклонения между целевым значением iq* тока q-оси и величиной iq тока q-оси.
[0077] Контроллер 14 мотора получает значения vu, vv и vw команд управления трехфазным переменным напряжением из значения vd команды управления напряжением d-оси, значения vq команды управления напряжением q-оси и фазы α вращателя мотора 1. Контроллер 14 мотора вычисляет PWM-сигналы Tu (%), Tv (%) и Tw (%) из полученных значений vu, vv и vw команд управления трехфазным переменным напряжением и значения Vdc постоянного напряжения.
[0078] Далее описываются подробности процесса управления остановкой, показанного на S303 на фиг. 3, со ссылкой на фиг. 5 в фиг. 10.
[0079] Фиг. 5 является блок-схемой, которая описывает процесс управления остановкой на S303 на фиг. 3.
[0080] Как проиллюстрировано на фиг. 5, процесс управления остановкой, выполняемый посредством контроллера 14 мотора, выполняет процессы посредством блока 501 задания крутящего F/B-момента по частоте вращения мотора, блока 502 оценки возмущающего крутящего момента, сумматора 503, модуля 504 сравнения и блока 505 вычисления значений команд управления.
[0081] В блоке 501 задания крутящего F/B-момента по частоте вращения мотора, вводится частота ωm вращения мотора, вычисленная на S301 на фиг. 3, и крутящий F/B-момент Tω по частоте вращения мотора выводится в сумматор 503. Ниже описывается подробный процесс в блоке 501 задания крутящего F/B-момента по частоте вращения мотора со ссылкой на фиг. 6.
[0082] В блок 502 оценки возмущающего крутящего момента, вводятся частота ωm вращения мотора и значение Tm* команды управления крутящим моментом мотора и значение Tb* команды управления крутящим моментом трения, которые представляют собой вводы с обратной связью из блока 505 вычисления значений команд управления. В блоке 502 оценки возмущающего крутящего момента, оцененное значение Td возмущающего крутящего момента оценивается с использованием этих вводов и модели транспортного средства. Блок 502 оценки возмущающего крутящего момента выводит оцененное значение Td возмущающего крутящего момента в сумматор 503. Следует отметить, что ниже описывается подробный процесс в блоке 502 оценки возмущающего крутящего момента со ссылкой на фиг. 7.
[0083] Сумматор 503 суммирует крутящий F/B-момент Tω по частоте вращения мотора, выводимый из блока 501 задания крутящего F/B-момента по частоте вращения мотора, с оцененным значением Td возмущающего крутящего момента, выводимым из блока 502 оценки возмущающего крутящего момента, чтобы вычислять значение Tm2* второго целевого крутящего момента. Сумматор 503 выводит значение Tm2* второго целевого крутящего момента в модуль 504 сравнения.
[0084] Модуль 504 сравнения сравнивает абсолютные величины значения Tm1* первого целевого крутящего момента, вычисленного на S302 на фиг. 3, со значением Tm2* второго целевого крутящего момента, выводимым из сумматора 503. Модуль 504 сравнения выводит большее значение из значения Tm1* первого целевого крутящего момента и значения Tm2* второго целевого крутящего момента в блок 505 вычисления значений команд управления в качестве значения Tm3* третьего целевого крутящего момента.
[0085] Блок 505 вычисления значений команд управления выполняет управление вычислением значений команд управления. Блок 505 вычисления значений команд управления получает значение Tm* команды управления крутящим моментом мотора и значение Tb* команды управления крутящим моментом трения из частоты ωm вращения мотора и вводов значения Tm3* третьего целевого крутящего момента из модуля 504 сравнения и рекуперативной электрической мощности Pin из контроллера 13 аккумулятора и выводит значения. Ниже описывается подробный процесс управления вычислением значений команд управления в блоке 505 вычисления значений команд управления со ссылкой на фиг. 8.
[0086] Далее описываются подробности процесса в блоке 501 задания крутящего F/B-момента по частоте вращения мотора, проиллюстрированном на фиг. 5, со ссылкой на фиг. 6.
[0087] Фиг. 6 является блок-схемой, иллюстрирующей процесс в блоке 501 задания крутящего F/B-момента по частоте вращения мотора. Блок 501 задания крутящего F/B-момента по частоте вращения мотора состоит из умножителя 601 и выводит результат умножения ввода частоты ωm вращения мотора на усиление Kvref в качестве крутящего F/B-момента Tω по частоте вращения мотора.
[0088] Следует отметить, что отрицательное значение задается равным Kvref, так что электрическое транспортное средство 100 замедляется или останавливается в то время, когда педаль акселератора является полностью закрытой (позиция θ акселератора составляет 0%). Соответственно, при условии, что частота ωm вращения мотора имеет большое положительное значение, крутящий F/B-момент Tω по частоте вращения мотора становится большим отрицательным значением, и в силу этого тормозная сила увеличивается. Следует отметить, что конкретное значение Kvref задается, например, на основе экспериментальных данных.
[0089] В этом варианте осуществления, тогда как блок 501 задания крутящего F/B-момента по частоте вращения мотора умножает частоту ωm вращения мотора на усиление Kvref, чтобы вычислять крутящий F/B-момент Tω по частоте вращения мотора, способ не ограничен этим. Блок 501 задания крутящего F/B-момента по частоте вращения мотора может использовать таблицу рекуперативных крутящих моментов, в которой частоты ωm вращения мотора заданы таким образом, что они соответствуют рекуперативным крутящим моментам, таблицу темпов спада, указывающую темпы спада частоты ωm вращения мотора, либо аналогичную таблицу, чтобы вычислять крутящий F/B-момент Tω по частоте вращения мотора.
[0090] Далее описываются подробности процесса посредством блока 502 оценки возмущающего крутящего момента, проиллюстрированного на фиг. 5, со ссылкой на фиг. 7.
[0091] Фиг. 7 является блок-схемой, иллюстрирующей процесс в блоке 502 оценки возмущающего крутящего момента. В блоке 502 оценки возмущающего крутящего момента, вводятся частота ωm вращения мотора, значение Tm* команды управления крутящим моментом мотора и значение Tb* команды управления крутящим моментом трения, и выводится оцененное значение Td возмущающего крутящего момента.
[0092] Блок 502 оценки возмущающего крутящего момента включает в себя блоки 701-704 и модули 705 и 706 вычитания.
[0093] В блоке 701, процесс фильтрации выполняется для частоты ωm вращения мотора посредством H(s)/Gp(s) с использованием фильтра H(s) нижних частот. Фильтр H(s) нижних частот имеет разность между степенью знаменателя и степенью числителя, равную или большую разности между степенью знаменателя и степенью числителя модели Gp(s) для передаточных характеристик крутящего момента Tm мотора и частоты ωm вращения мотора, чтобы вычислять оцененное значение Tmp1 первого крутящего момента мотора.
[0094] В блоке 702, процесс фильтрации выполняется для значения Tm* команды управления крутящим моментом мотора посредством фильтра H(s) нижних частот, чтобы вычислять оцененное значение Tmp2 второго крутящего момента мотора.
[0095] В блоке 703, процесс фильтрации выполняется для значения Tb* команды управления крутящим моментом трения в передаточной функции Gb(s) из величины Tb фрикционного торможения до частоты ωm вращения мотора, чтобы вычислять оцененное значение ωmp частоты фрикционного вращения.
[0096] В блоке 704, аналогичном блоку 701, процесс фильтрации выполняется для частоты ωmp фрикционного вращения посредством H(s)/Gp(s), чтобы вычислять оцененное значение Tbp крутящего момента трения.
[0097] Модуль 705 вычитания вычитает оцененное значение Tbp крутящего момента трения, выводимое из блока 704, из оцененного значения Tmp2 второго крутящего момента мотора, выводимого из блока 702, чтобы получать оцененное значение Tmp3 третьего крутящего момента мотора. Модуль 705 вычитания выводит оцененное значение Tmp3 третьего крутящего момента мотора в модуль 706 вычитания.
[0098] Модуль 706 вычитания вычитает оцененное значение Tmp1 первого крутящего момента мотора, выводимое из блока 701, из оцененного значения Tmp3 третьего крутящего момента мотора, выводимого из модуля 705 вычитания, чтобы вычислять оцененное значение Td возмущающего крутящего момента и выводить оцененное значение Td возмущающего крутящего момента.
[0099] Следует отметить, что хотя этот вариант осуществления оценивает возмущающий крутящий момент посредством модуля наблюдения возмущений, как проиллюстрировано на фиг. 7, возмущающий крутящий момент может оцениваться с использованием измерительного прибора, такого как датчик продольной составляющей G транспортного средства.
[0100] Хотя сопротивление воздуха, погрешность моделирования, вызываемая посредством варьирования веса транспортного средства (числа пассажиров и допустимой нагрузки), сопротивление крену шин, сопротивление вследствие градиента и аналогичное сопротивление рассматриваются в качестве возмущений, на которые нацелен вариант осуществления, фактор возмущений, доминирующий в момент непосредственно перед остановкой транспортного средства, представляет собой сопротивление вследствие градиента. Хотя факторы возмущений отличаются в зависимости от условий вождения, факторы возмущений, описанные выше, могут совместно оцениваться, поскольку блок 502 оценки возмущающего крутящего момента вычисляет оцененное значение Td возмущающего крутящего момента на основе значения Tm* команды управления крутящим моментом мотора, частоты ωm вращения мотора, моделей Gp(s) и Gb(s) транспортного средства и значения Tb* команды управления крутящим моментом трения. Это позволяет добиваться плавной остановки транспортного средства из замедления без варьирования при любом состоянии движения.
[0101] Далее описывается работа модуля 504 сравнения, когда электрическое транспортное средство 100 останавливается, при этом оцененное значение Td возмущающего крутящего момента становится частью ввода, со ссылкой на фиг. 5. В модуль 504 сравнения, вводятся значение Tm1* первого целевого крутящего момента и значение Tm2* второго целевого крутящего момента.
[0102] Здесь, когда электрическое транспортное средство 100 останавливается, значение Tm1* первого целевого крутящего момента становится отрицательным значением. Это обусловлено тем, что в таблице крутящих моментов по фиг. 4, когда электрическое транспортное средство 100 останавливается, т.е. когда позиция θ акселератора равна нулю, и частота ωm вращения мотора становится сравнительно небольшой, значение Tm1* первого целевого крутящего момента является отрицательным значением.
[0103] Снова ссылаясь на фиг. 5, когда электрическое транспортное средство 100 останавливается, значение Tm2* второго целевого крутящего момента сходится к предварительно определенному значению согласно градиенту. Это обусловлено тем, что когда электрическое транспортное средство 100 останавливается, схождение частоты ωm вращения мотора к нулю обеспечивает схождение крутящего F/B-момента Tω по частоте вращения мотора, выводимого из блока 501 задания крутящего F/B-момента по частоте вращения мотора в качестве умножителя, к нулю, и оцененное значение Td возмущающего крутящего момента, выводимое из блока 502 оценки возмущающего крутящего момента, становится приблизительно постоянным предварительно определенным значением согласно градиенту.
[0104] В состоянии остановки транспортного средства, значение схождения значения Tm2* второго целевого крутящего момента превышает постоянное отрицательное значение для значения Tm1* первого целевого крутящего момента. Следовательно, до тех пор, пока электрическое транспортное средство 100 не остановится, значение Tm2* второго целевого крутящего момента становится больше значения Tm1* первого целевого крутящего момента. Следовательно, посредством оценки состояния становления значения Tm2* второго целевого крутящего момента больше значения Tm1* первого целевого крутящего момента в качестве состояния, в котором электрическое транспортное средство 100 находится в момент времени непосредственно перед остановкой транспортного средства, переключение процессов согласно тому, находится или нет электрическое транспортное средство 100 в момент времени непосредственно перед остановкой транспортного средства, может выполняться с использованием модуля 504 сравнения.
[0105] Как описано выше, в случае если значение Tm2* второго целевого крутящего момента становится больше значения Tm1* первого целевого крутящего момента, т.е. когда электрическое транспортное средство 100 рассматривается как находящееся в состоянии непосредственно перед остановкой транспортного средства, модуль 504 сравнения выводит значение Tm2* второго целевого крутящего момента. Значение Tm2* второго целевого крутящего момента сходится к предварительно определенному значению, при котором может уменьшаться влияние от градиента. Соответственно, поскольку мотор 1 уменьшает частоту вращения при управлении таким образом, что влияние от градиента уменьшается, электрическое транспортное средство 100 может плавно останавливаться.
[0106] Кроме того, значение Tm2* второго целевого крутящего момента, которое используется для управления мотором 1 в то время, когда электрическое транспортное средство 100 останавливается, является главным образом значением, чтобы уменьшать влияние от градиента. Значение Tm2* второго целевого крутящего момента становится положительным крутящим моментом на дорогах, идущих в подъем, становится отрицательным крутящим моментом на дорогах, идущих под спуск, и становится приблизительно нулевым на ровных дорогах. Соответственно, поскольку мотор 1 управляется таким образом, что влияние от градиента уменьшается, состояние остановки транспортного средства может поддерживаться в местах с градиентом без использования педали тормоза.
[0107] В дальнейшем описываются подробности управления вычислением значений команд управления, выполняемого в блоке 505 вычисления значений команд управления, проиллюстрированном на фиг. 5, со ссылкой на фиг. 8.
[0108] Фиг. 8 является блок-схемой последовательности операций способа, иллюстрирующей управление вычислением значений команд управления. Фиг. 8 иллюстрирует процессы S801-S806 при управлении вычислением значений команд управления. В этих процессах, способ торможения выбирается на S801 и S803, и значения команд управления получаются на S804 на S806.
[0109] На этапе S801, контроллер 14 мотора определяет то, может или нет рекуперироваться аккумулятор 2, посредством определения того, равна или нет рекуперативная электрическая мощность Pin, передаваемая из контроллера 13 аккумулятора, нулю. Таким образом, когда рекуперативная электрическая мощность Pin равна нулю (S801: "Да"), контроллер 14 мотора определяет то, что аккумулятор 2 возможно избыточно заряжается, если рекуперативное торможение выполняется, и переводит процесс на S802. С другой стороны, когда рекуперативная электрическая мощность Pin не равна нулю (S801: "Нет"), поскольку аккумулятор 2 имеет доступную емкость, контроллер 14 мотора определяет то, что аккумулятор 2 надлежащим образом заряжается, даже если рекуперативное торможение выполняется, и выбирает рекуперативное торможение, чтобы переводить процесс на S805.
[0110] На этапе S802, контроллер 14 мотора вычисляет зарядный ток Ic с использованием значения Tm3* третьего целевого крутящего момента, выводимого из модуля 504 сравнения на фиг. 5, и частоты ωm вращения мотора, вычисленной на S301 на фиг. 3.
[0111] Здесь, зарядный ток Ic представляет собой ток, который протекает в аккумулятор 2, когда выполняется рекуперативное торможение. Таким образом, когда вся рекуперативная электрическая мощность мотора 1 потребляется посредством электрического транспортного средства 100, зарядный ток Ic становится отрицательным. Зарядный ток Ic становится отрицательным непосредственно перед остановкой транспортного средства, что представляет собой состояние, в котором скорость транспортного средства уменьшается таким образом, что вся рекуперативная электрическая мощность мотора 1 становится равной или меньше потребления мощности, потребляемого посредством электрического транспортного средства 100. С другой стороны, когда рекуперативная электрическая мощность мотора 1 не полностью потребляется посредством электрического транспортного средства 100, но заряжается в аккумулятор 2, зарядный ток Ic становится положительным. Таким образом, знак зарядного тока Ic указывает соотношение абсолютных величин между рекуперативной электрической мощностью мотора 1 и потреблением мощности электрического транспортного средства 100. Следует отметить, что рекуперативная электрическая мощность означает электрическую мощность, вырабатываемую в моторе 1. Потребление мощности означает электрическую мощность, потребляемую посредством вращающегося привода в моторе 1, и электрическую мощность, потребляемую в инверторе 3 и другом электрооборудовании.
[0112] Фиг. 9 является таблицей зарядных токов, иллюстрирующей то, является или положительным зарядный ток Ic, согласно значению Tm* команды управления крутящим моментом мотора и частоте ωm вращения мотора. Следует отметить, что на фиг. 9, горизонтальная ось указывает частоту ωm вращения мотора, и вертикальная ось указывает значение Tm* команды управления крутящим моментом мотора. Следует отметить, что значение Tm3* третьего целевого крутящего момента, используемое на S802, является эквивалентным значению Tm* команды управления крутящим моментом мотора.
[0113] Фиг. 9 иллюстрирует то, аккумулятор 2 заряжается или разряжается, когда приведение в действие и рекуперация в соответствии со значением Tm* команды управления крутящим моментом мотора выполняются в состоянии, в котором мотор 1 вращается на частоте ωm вращения мотора. Здесь, частота ωm вращения мотора указывает состояние движения электрического транспортного средства 100, и значение Tm* команды управления крутящим моментом мотора получается согласно позиции акселератора. В дополнение к соотношению абсолютных величин между рекуперативной электрической мощностью и потреблением мощности, то, аккумулятор 2 заряжается или разряжается, определяется посредством того, равна или нет рекуперативная электрическая мощность Pin нулю. Соответственно, фиг. 9 иллюстрирует прогнозный результат соотношения абсолютных величин между рекуперативной электрической мощностью и потреблением мощности на основе позиции акселератора и состояния движения электрического транспортного средства 100.
[0114] В частности, на фиг. 9, заштрихованная область представляет собой область разряда, и области без штриховки представляют собой области заряда. Когда рекуперативное торможение выполняется в области разряда, прогнозируется то, что рекуперативная электрическая мощность посредством мотора 1 опускается ниже потребления мощности электрического транспортного средства 100, и аккумулятор 2 разряжается. Соответственно, зарядный ток Ic становится отрицательным. С другой стороны, когда рекуперативное торможение выполняется в области заряда, прогнозируется то, что рекуперативная электрическая мощность посредством мотора 1 превышает потребление мощности электрического транспортного средства 100, и аккумулятор 2 заряжается. Соответственно, зарядный ток Ic становится положительным. Следует отметить, что когда позиция, указываемая ссылкой на фиг. 9, представляет собой границу между областью разряда и областью заряда, зарядный ток Ic равен нулю.
[0115] Снова со ссылкой на фиг. 8, контроллер 14 мотора определяет то, является или нет положительным зарядный ток Ic, вычисленный на S802, на этапе S803. Когда зарядный ток Ic является положительным (S803: "Да"), выполнение рекуперативного торможения обуславливает то, что рекуперативная электрическая мощность превышает потребление мощности, приводя к избыточному заряду аккумулятора 2. Следовательно, контроллер 14 мотора определяет то, что рекуперативное торможение не может выполняться, и выбирает фрикционное торможение, чтобы переводить процесс на S804. С другой стороны, когда зарядный ток Ic не является положительным (S803: "Нет"), рекуперативная электрическая мощность становится равной или меньше потребления мощности, даже когда выполняется рекуперативное торможение. Следовательно, контроллер 14 мотора определяет то, что рекуперативное торможение может выполняться, и выбирает рекуперативное торможение, чтобы переводить процесс на S805.
[0116] Следует отметить, что в качестве модификации S802 и S803, контроллер 14 мотора может определять то, является зарядный ток Ic положительным или отрицательным, посредством определения того, представляет собой либо нет позиция, указываемая ссылкой посредством значения Tm3* третьего целевого крутящего момента и частоты ωm вращения мотора на фиг. 9 область заряда или область разряда.
[0117] На этапе S804, контроллер 14 мотора задает значение Tm** команды управления крутящим моментом мотора (перед процессом фильтрации) и значение Tb** команды управления крутящим моментом трения (перед процессом фильтрации), используемые при фрикционном торможении.
[0118] В частности, значение Tm** команды управления крутящим моментом мотора (перед процессом фильтрации) задается равным 0. Абсолютное значение для целевого значения Tm3* третьего крутящего момента мотора, к которому присоединяется знак, идентичный знаку угловой скорости ωw ведущих колес 6, задается в качестве значения Tb** команды управления крутящим моментом трения (перед процессом фильтрации). Таким образом, когда угловая скорость ωw ведущих колес 6 является положительной (ωw>0), т.е. когда электрическое транспортное средство 100 движется передним ходом, значение Tb** команды управления крутящим моментом трения (перед процессом фильтрации) становится положительным. Когда угловая скорость ωw ведущих колес 6 является отрицательной (ωw<0), т.е. когда электрическое транспортное средство 100 движется задним ходом, значение Tb** команды управления крутящим моментом трения (перед процессом фильтрации) становится отрицательным. Когда угловая скорость ωw ведущего колеса 6 равна нулю (ωw=0), т.е. когда электрическое транспортное средство 100 останавливается, фрикционное торможение не выполняется. Таким образом, знак значения Tb** команды управления крутящим моментом трения (перед процессом фильтрации) становится нулевым.
[0119] С другой стороны, на этапе S805, контроллер 14 мотора задает значение Tm3* третьего целевого крутящего момента в качестве значения Tm** команды управления крутящим моментом мотора (перед процессом фильтрации) и задает нуль в качестве значения Tb** команды управления крутящим моментом трения (перед процессом фильтрации).
[0120] На этапе S806, контроллер 14 мотора выполняет процесс фильтрации для значения Tm** команды управления крутящим моментом мотора (перед процессом фильтрации) и значения Tb** команды управления крутящим моментом трения (перед процессом фильтрации), чтобы вычислять значение Tm* команды управления крутящим моментом мотора и значение Tb* команды управления крутящим моментом трения. Далее описываются подробности процесса фильтрации на S806 со ссылкой на фиг. 10.
[0121] Фиг. 10 является блок-схемой, иллюстрирующей процесс фильтрации на S806, проиллюстрированном на фиг. 8.
[0122] Как проиллюстрировано на фиг. 10, блок 505 вычисления значений команд управления включает в себя блоки 1001 и 1002.
[0123] Блок 1001 представляет собой фильтр Hba(s), который выполняет процесс фильтрации для входного значения Tm** команды управления крутящим моментом мотора (перед процессом фильтрации) и выводит значение Tm* команды управления крутящим моментом мотора. Следует отметить, что фильтр Hba(s) выражается посредством следующего уравнения.
[0124] уравнение 14

[0125] Следует отметить, что фильтр Hbrk(s) в уравнении (12) выражается посредством следующего уравнения.
[0126] уравнение 15

[0127] Следует отметить, что параметр в уравнении (13) заключается в следующем:
ωb - уникальная частота вибрации, когда отклик актуатора в модуле 7 фрикционного торможения выражается посредством системы вибрации второго порядка.
[0128] Фильтр Hba(s) представляет собой произведение передаточной функции Gba(s), 1/Gpa(s) в качестве обратной передаточной функции Gpa(s) и фильтра Hbk(s). Следовательно, вывод ускорения a электрического транспортного средства 100 получается из ввода значения Tm** команды управления крутящим моментом мотора (перед процессом фильтрации) с передаточной функцией Gba(s). Кроме того, ускорение a становится вводом, и крутящий момент приведения в действие мотора 1 получается с обратной передаточной функцией 1/Gpa(s). Затем фильтр Hbrk(s) выполняет процесс фильтрации, подходящий для фрикционного торможения, чтобы получать значение Tm* команды управления крутящим моментом мотора.
[0129] Блок 1002 представляет собой фильтр Hinv(s), который выполняет процесс фильтрации для входного значения Tb** команды управления крутящим моментом трения (перед процессом фильтрации) и выводит значение Tb* команды управления крутящим моментом трения. Следует отметить, что фильтр Hinv(s) выражается следующим образом.
[0130] уравнение 16

[0131] Следует отметить, что параметры в уравнении (14) заключаются в следующем.
ωp - уникальная частота вибрации в модели транспортного средства
ζp - коэффициент демпфирования в модели транспортного средства.
[0132] Использование такого фильтра Hba(s) блока 1001 и фильтра Hinv(s) блока 1002 обеспечивает придание равномерности скорости отклика ускорения из крутящего момента мотора и скорости отклика ускорения из величины фрикционного торможения.
[0133] Здесь, поскольку модуль 7 фрикционного торможения выполняет гидравлическое торможение с низкой скоростью отклика в то время, когда скорость отклика мотора 1 является почти мгновенной, существует разность скорости отклика между рекуперативным торможением и фрикционным торможением. Соответственно, например, как и в случае, когда рекуперативное торможение и фрикционное торможение переключаются, даже когда значение Tm** команды управления крутящим моментом мотора (перед процессом фильтрации) и значение Tb** команды управления крутящим моментом трения (перед процессом фильтрации) в качестве входных значений быстро изменяются, выполнение процесса фильтрации в блоках 1001 и 1002 учитывает разность скорости отклика между гидравлическим торможением и рекуперативным торможением в значении Tm* команды управления крутящим моментом мотора и значении Tb* команды управления крутящим моментом трения в качестве выходных значений.
[0134] Таким образом, в процессе фильтрации на S806, использование блоков 1001 и 1002 уменьшает быстрое изменение значения команды управления в мотор 1 и модуль 7 фрикционного торможения. В частности, в значении Tm* команды управления крутящим моментом мотора в качестве значения команды управления в мотор 1, быстрое варьирование уменьшается таким образом, что медленный отклик модуля 7 фрикционного торможения компенсируется. Следовательно, разность между значением команды управления и значением отклика в модуле 7 фрикционного торможения, вызываемая вследствие небольшой скорости отклика в модуле 7 фрикционного торможения, компенсируется посредством мотора 1.
[0135] Далее описывается режим движения электрического транспортного средства 100 со ссылкой на фиг. 11.
[0136] Фиг. 11 является видами, иллюстрирующими режим движения электрического транспортного средства 100. Фиг. 11 иллюстрирует режим движения электрического транспортного средства 100, когда рекуперативная электрическая мощность Pin равна нулю, и переключение с фрикционного торможения на рекуперативное торможение выполняется (время tc) после того, как электрическое транспортное средство 100 переходит в состояние непосредственно перед остановкой транспортного средства (время t2).
[0137] Фиг. 11 иллюстрирует режим движения электрического транспортного средства 100 на (a) дороге, идущей в подъем, (b) ровной дороге и (c) дороге, идущей под спуск. Фиг. 11 иллюстрирует частоту ωm вращения мотора в (a1), (b1) и (c1) на самом верхней стадии. В (a2), (b2) и (c2) на второй стадии сверху, значение Tm* команды управления крутящим моментом мотора проиллюстрировано в сплошных линиях, оцененное значение Td возмущающего крутящего момента проиллюстрировано в штрихпунктирных линиях с одной точкой, и значение Tm3* третьего целевого крутящего момента проиллюстрировано в штрихпунктирных линиях с двумя точками. В (a3), (b3) и (c3) на третьей стадии сверху, проиллюстрировано значение Tb* команды управления крутящим моментом трения. В (a4), (b4) и (c4) на самой нижнем стадии, проиллюстрировано ускорение a электрического транспортного средства 100.
[0138] Фиг. 12 является таблицами зарядных токов, иллюстрирующими режим движения электрического транспортного средства 100 на фиг. 11. Фиг. 12 указывает изменения зарядного тока Ic до тех пор, пока электрическое транспортное средство 100 не остановится, когда электрическое транспортное средство 100 движется на соответствующей (a) дороге, идущей в подъем, (b) ровной дороге и (c) дороге, идущей под спуск, посредством пунктирных линий.
[0139] Во-первых, далее описывается режим движения электрического транспортного средства 100 в каждое время на фиг. 11.
[0140] Во время, t0 позиция θ акселератора равна 0, и электрическое транспортное средство 100 начинает замедление посредством фрикционного торможения. Во время t2, электрическое транспортное средство 100 находится в состоянии непосредственно перед остановкой транспортного средства и переключает состояние на торможение с использованием оцененного значения Td возмущающего крутящего момента. Во время tc между временем t2 и временем t5, способ торможения переключается с фрикционного торможения на рекуперативное торможение. Во время t5, электрическое транспортное средство 100 останавливается.
[0141] Здесь, далее описывается состояние движения электрического транспортного средства 100 во время t0, в которое замедление посредством фрикционного торможения начинается на дороге, идущей в подъем.
[0142] Со ссылкой на фиг. 11 (a1), во время t0, электрическое транспортное средство 100 находится в состоянии перед непосредственно перед остановкой транспортного средства. Скорость электрического транспортного средства 100 монотонно уменьшается, за счет этого монотонно уменьшая частоту ωm вращения мотора.
[0143] Со ссылкой на фиг. 11 (a2), во время t0, поскольку влияние от градиента поверхности дороги является доминирующим, оцененное значение Td возмущающего крутящего момента является положительным значением согласно градиенту дороги, идущей в подъем. Следует отметить, что оцененное значение Td возмущающего крутящего момента является главным образом идентичным значением, поскольку влияние от градиента поверхности дороги является доминирующим даже во время, отличное от времени t0.
[0144] Значение Tm3* третьего целевого крутящего момента является предварительно определенным отрицательным значением. Это может описываться следующим образом.
[0145] Модуль 504 сравнения, проиллюстрированный на фиг. 5, выводит значение Tm1* первого целевого крутящего момента в качестве значения Tm3* третьего целевого крутящего момента, поскольку электрическое транспортное средство 100 не находится в состоянии непосредственно перед остановкой транспортного средства. Здесь, со ссылкой на таблицу крутящих моментов на фиг. 4, когда электрическое транспортное средство 100 находится в состоянии непосредственно перед остановкой транспортного средства, т.е. когда позиция θ акселератора равна нулю, и частота ωm вращения мотора является небольшой, значение Tm1* первого целевого крутящего момента является постоянным отрицательным значением. Соответственно, значение Tm3* третьего целевого крутящего момента становится значением Tm1* первого целевого крутящего момента в качестве постоянного отрицательного значения.
[0146] Значение Tm* команды управления крутящим моментом мотора равно нулю. Это может описываться следующим образом.
[0147] Со ссылкой на процесс вычисления значений команд управления на фиг. 8, рекуперативная электрическая мощность Pin равна нулю (S801: "Да"), и зарядный ток Ic с положительным значением вычисляется в процессе на S802. Следовательно, фрикционное торможение выбирается (S803: "Нет"), и значение Tm** команды управления крутящим моментом мотора (перед процессом фильтрации) становится нулевым (S804). Следует отметить, что значение Tm** команды управления крутящим моментом мотора (перед процессом фильтрации) не варьируется. Следовательно, значение Tm* команды управления крутящим моментом мотора через блок 1001 на фиг. 10 также становится нулевым (S806).
[0148] Со ссылкой на фиг. 11 (a3), во время t0, значение Tb* команды управления крутящим моментом трения задается равным абсолютному значению для значения Tm3* третьего целевого крутящего момента, проиллюстрированного на фиг. 11 (a2) со знаком плюс. Это обусловлено тем, что поскольку фрикционное торможение выполняется, как описано выше, процесс вычисления значений команд управления на фиг. 8 задает значение Tb* команды управления крутящим моментом трения равным значению согласно значению Tm3* третьего целевого крутящего момента на S804.
[0149] Со ссылкой на фиг. 11 (a4), во время t0, поскольку частота ωm вращения мотора монотонно уменьшается, как проиллюстрировано на фиг. 11 (a1), ускорение a является постоянным при отрицательном значении.
[0150] Далее описывается состояние движения электрического транспортного средства 100 во время t2, в которое электрическое транспортное средство 100 находится в состоянии непосредственно перед остановкой транспортного средства на дороге, идущей в подъем.
[0151] Со ссылкой на фиг. 11 (a1), во время t2, поскольку электрическое транспортное средство 100 находится в состоянии непосредственно перед остановкой транспортного средства и переключается на F/B-управление частоты вращения мотора, градиент уменьшения частоты ωm вращения мотора уменьшается.
[0152] Со ссылкой на фиг. 11 (a2), во время t2, значение Tm3* третьего целевого крутящего момента значительно изменяется. Это вызывается посредством изменения на противоположное соотношения абсолютных величин между значением Tm1* первого целевого крутящего момента и значением Tm2* целевого крутящего момента до и после времени t2, поскольку электрическое транспортное средство 100 переходит в состояние непосредственно перед остановкой транспортного средства. Таким образом, значение Tm3* третьего целевого крутящего момента, выводимое из модуля 504 сравнения на фиг. 5, является значением Tm1* первого целевого крутящего момента перед временем t2 и значением Tm2* второго целевого крутящего момента после времени t2. Следует отметить, что во время t2, значение Tm1* первого целевого крутящего момента и значение Tm2* второго целевого крутящего момента являются идентичными значениями. Следовательно, модуль 504 сравнения на фиг. 5 выводит любое из значения Tm1* первого целевого крутящего момента и значения Tm2* второго целевого крутящего момента в качестве значения Tm3* третьего целевого крутящего момента.
[0153] После времени t2, значение Tm3* третьего целевого крутящего момента в качестве значения Tm2* второго целевого крутящего момента сходится к оцененному значению Td возмущающего крутящего момента. Это обусловлено тем, что со ссылкой на фиг. 5, по мере того, как крутящий F/B-момент Tω по частоте вращения мотора, выводимый из блока 501 задания крутящего F/B-момента по частоте вращения мотора, уменьшается в ассоциации с уменьшением частоты ωm вращения мотора, значение Tm2* второго целевого крутящего момента, выводимое из сумматора 503, сходится к оцененному значению Td возмущающего крутящего момента, выводимому из блока 502 оценки возмущающего крутящего момента.
[0154] Значение Tm* команды управления крутящим моментом мотора равно нулю. Это обусловлено тем, что аналогично времени t0, рекуперативная электрическая мощность равна нулю (S801: "Да") в процессе вычисления значений команд управления, проиллюстрированном на фиг. 8, и зарядный ток Ic во время t2 является положительным на фиг. 12(a) (S803: "Да"); в силу этого фрикционное торможение выполняется (S804, S806).
[0155] Со ссылкой на фиг. 11 (a3), во время t2, значение Tb* команды управления крутящим моментом трения является абсолютным значением для значения Tm3* третьего целевого крутящего момента на фиг. 11 (a2) со знаком плюс, поскольку фрикционное торможение выполняется, как описано выше. Следует отметить, что после времени t2, значение Tb* команды управления крутящим моментом трения уменьшается в ассоциации с увеличением значения Tm3* третьего целевого крутящего момента. Следует отметить, что во время t2, изменение значения Tb* команды управления крутящим моментом трения является более пологим, чем изменение значения Tm3* третьего целевого крутящего момента. Это обусловлено тем, что варьирование уменьшается посредством процесса блока 1002 на фиг. 10 на S806 на фиг. 8.
[0156] Со ссылкой на фиг. 11 (a4), во время и после времени t2, электрическое транспортное средство 100 находится в состоянии непосредственно перед остановкой транспортного средства. Следовательно, ускорение a постепенно увеличивается с отрицательного значения вследствие градиента уменьшения частоты ωm вращения мотора, начинающегося как небольшой, как проиллюстрировано на фиг. 11 (a2).
[0157] В дальнейшем описывается состояние движения электрического транспортного средства 100 во время tc, в которое способ торможения переключается с фрикционного торможения на рекуперативное торможение на дороге, идущей в подъем.
[0158] Со ссылкой на фиг. 11 (a1), во время tc, частота ωm вращения мотора является значением, близким к нулю. Это обусловлено тем, что как описано выше, частота ωm вращения мотора сходится к нулю после времени t2, в которое электрическое транспортное средство 100 находится в состоянии непосредственно перед остановкой транспортного средства.
[0159] Со ссылкой на фиг. 11 (a2), во время tc, значение Tm3* третьего целевого крутящего момента является значением, близким к оцененному значению Td возмущающего крутящего момента. Это обусловлено тем, что как описано выше, значение Tm3* третьего целевого крутящего момента сходится к оцененному значению Td возмущающего крутящего момента после времени t2, в которое электрическое транспортное средство 100 находится в состоянии непосредственно перед остановкой транспортного средства.
[0160] Значение Tm* команды управления крутящим моментом мотора равно нулю во время tc и сходится к значению Tm3* третьего целевого крутящего момента с течением времени после времени tc. Это обусловлено тем, что контроллер 14 мотора выполняет следующую операцию.
[0161] Со ссылкой на процесс вычисления значений команд управления, проиллюстрированный на фиг. 8, перед временем tc, рекуперативная электрическая мощность равна нулю (S801: "Да"), положительный зарядный ток Ic вычисляется (S802), фрикционное торможение выбирается (S803: "Да"), значение Tm** команды управления крутящим моментом мотора (перед процессом фильтрации) задается равным нулю (S804). С другой стороны, во время tc рекуперативная электрическая мощность равна нулю (S801: "Да"), зарядный ток Ic нуля вычисляется (S802), рекуперативное торможение выбирается (S803: "Нет"), и значение Tm** команды управления крутящим моментом мотора (перед процессом фильтрации) задается равным значению Tm3* третьего целевого крутящего момента (S805).
[0162] Соответственно, значение Tm** команды управления крутящим моментом мотора (перед процессом фильтрации) задается равным нулю перед временем tc (S804) и задается равным значению Tm3* третьего целевого крутящего момента во время и после времени tc (S805). Следовательно, значение Tm** команды управления крутящим моментом мотора (перед процессом фильтрации) быстро варьируется.
[0163] Тем не менее выполнение процесса блока 1001 на фиг. 10 на S806 уменьшает варьирование значения Tm* команды управления крутящим моментом мотора после процесса фильтрации. Следовательно, значение Tm* команды управления крутящим моментом мотора, которое равно нулю во время tc, сходится к значению Tm3* третьего целевого крутящего момента с течением времени.
[0164] Следует отметить, что в блоке 1001, как проиллюстрировано в уравнении (12), задержка скорости отклика модуля 7 фрикционного торможения учитывается. Следовательно, изменение значения Tm* команды управления крутящим моментом мотора уменьшается таким образом, что избыточная величина крутящего момента фрикционного торможения, вызываемая посредством задержки скорости отклика посредством модуля 7 фрикционного торможения, компенсируется. С учетом этого, величина крутящего момента трения, вызываемая посредством небольшой скорости отклика модуля 7 фрикционного торможения, компенсируется посредством движущей силы мотора 1, когда способ торможения переключается с фрикционного торможения на рекуперативное торможение.
[0165] Со ссылкой на фиг. 11 (a3), значение Tb* команды управления крутящим моментом трения является значением, найденным посредством выполнения процесса фильтрации для абсолютного значения для значения Tm3* третьего целевого крутящего момента со знаком плюс во время tc, и сходится к нулю с течением времени после времени tc. Такое изменение значения Tb* команды управления крутящим моментом трения может описываться следующим образом.
[0166] Как описано выше, в процессе вычисления значений команд управления на фиг. 8, фрикционное торможение выполняется перед временем tc (S804), и рекуперативное торможение выполняется во время и после времени tc (S805).
[0167] Соответственно, значение Tb** команды управления крутящим моментом трения (перед процессом фильтрации) задается равным абсолютному значению для значения Tm3* третьего целевого крутящего момента со знаком плюс перед временем tc (S804) и задается равным нулю во время и после времени tc (S805). Следовательно, значение Tb** команды управления крутящим моментом трения (перед процессом фильтрации) быстро изменяется.
[0168] Тем не менее выполнение процесса блока 1002 на фиг. 10 на S806 уменьшает варьирование значения Tb* команды управления крутящим моментом трения после процесса фильтрации. Следовательно, значение Tb* команды управления крутящим моментом трения в качестве значения, найденного посредством выполнения процесса фильтрации для значения Tm3* третьего целевого крутящего момента, сходится к нулю с течением времени.
[0169] Со ссылкой на фиг. 11 (a4), градиент уменьшения частоты ωm вращения мотора уменьшается, как проиллюстрировано на фиг. 11 (a1) во время tc. Следовательно, изменение ускорения a постепенно снижается.
[0170] Далее описывается состояние движения электрического транспортного средства 100 во время t5, в которое электрическое транспортное средство 100 останавливается на дороге, идущей в подъем.
[0171] Со ссылкой на фиг. 11 (a1), электрическое транспортное средство 100 останавливается во время t5. Следовательно, частота ωm вращения мотора равна нулю.
[0172] Со ссылкой на фиг. 11 (a2), значение Tm* команды управления крутящим моментом мотора совпадает со значением Tm3* третьего целевого крутящего момента во время t5. Это обусловлено тем, что мотор 1 формирует крутящий момент (S805 и S806), поскольку, как описано выше, после времени tc, в процессе вычисления значений команд управления, проиллюстрированном на фиг. 8, рекуперативная электрическая мощность равна нулю (S801: "Да"), и зарядный ток Ic, вычисленный на S802, является отрицательным во время t5 (S803: "Нет"). Это предотвращает скатывание электрического транспортного средства 100 на дороге, идущей в подъем, за счет мотора 1, формирующего крутящий момент.
[0173] Как описано выше, значение Tm3* третьего целевого крутящего момента сходится к оцененному значению Td возмущающего крутящего момента во время и после времени t2. Следовательно, значение Tm* команды управления крутящим моментом мотора совпадает с оцененным значением Td возмущающего крутящего момента, соответствующим градиенту, когда электрическое транспортное средство 100 останавливается во время t5. Соответственно, мотор 1, формирующий положительный крутящий момент приведения в движение, который уменьшает влияние градиента, обеспечивает поддержание посредством электрического транспортного средства 100 состояния остановки транспортного средства на дороге, идущей в подъем.
[0174] Со ссылкой на фиг. 11 (a3), во время t5, рекуперативное торможение выбирается в процессе вычисления целевых значений на фиг. 8 (S803: "Нет"); в силу этого значение Tb* команды управления крутящим моментом трения становится нулевым (S805 и S806).
[0175] Со ссылкой на фиг. 11 (a4), во время t5, ускорение a становится положительным значением, так что электрическое транспортное средство 100 поддерживает состояние остановки транспортного средства на дороге, идущей в подъем. Это обусловлено тем, что как проиллюстрировано на фиг. 11 (a2), во время t5, мотор 1 формирует крутящий момент приведения в движение в соответствии со значением Tm* команды управления крутящим моментом мотора, которое является оцененным значением Td возмущающего крутящего момента.
[0176] Таким образом, на (a) дороге, идущей в подъем, вышеописанные процессы выполняются в соответствующие времена. Следует отметить, что на (b) ровной дороге и (c) на дороге, идущей под спуск, выполняется управляющая последовательность, идентичная управляющей последовательности на (a) дороге, идущей в подъем.
[0177] Тем не менее, в случаях на (b) ровной дороге и (c) на дороге, идущей под спуск, оцененное значение Td возмущающего крутящего момента, вычисленное в блоке 502 оценки возмущающего крутящего момента на фиг. 5 отличается от случая на (a) дороге, идущей в подъем. Оцененное значение Td возмущающего крутящего момента является значением, соответствующим градиенту. Со ссылкой на фиг. 11 (b2), оцененное значение Td возмущающего крутящего момента становится нулевым на (b) ровной дороге. Со ссылкой на фиг. 11 (c2), оцененное значение Td возмущающего крутящего момента становится отрицательным на (c) дороге, идущей под спуск.
[0178] В дальнейшем, со ссылкой на фиг. 13, описываются другие операции электрического транспортного средства 100.
[0179] Фиг. 13 является видами, иллюстрирующими режим движения электрического транспортного средства 100. По сравнению с фиг. 11, фиг. 13 является идентичным тем, что рекуперативная электрическая мощность Pin равна нулю, и отличается тем, что переключение с фрикционного торможения на рекуперативное торможение выполняется (время tc) до того, как электрическое транспортное средство 100 переходит в состояние непосредственно перед остановкой транспортного средства (время t2).
[0180] Следует отметить, что фиг. 13 иллюстрирует случаи (a) дороги, идущей в подъем, (b) ровной дороги и (c) дороги, идущей под спуск, аналогично фиг. 11. В каждом из (a) дороги, идущей в подъем, (b) ровной дороги и (c) дороги, идущей под спуск, частота ωm вращения мотора, значение Tm* команды управления крутящим моментом мотора, значение Tb* команды управления крутящим моментом трения и ускорение a проиллюстрированы в порядке сверху.
[0181] Фиг. 14 является таблицей зарядных токов, иллюстрирующей режим движения электрического транспортного средства 100 на фиг. 13. Фиг. 14, аналогично фиг. 12, иллюстрирует, когда электрическое транспортное средство 100 движется на каждой из (a) дороги, идущей в подъем, (b) ровной дороги и (c) дороги, идущей под спуск.
[0182] В дальнейшем описываются операции электрического транспортного средства 100 в соответствующие времена на фиг. 13.
[0183] Как описано выше, по сравнению с фиг. 11, фиг. 13 отличается тем, что электрическое транспортное средство 100 переходит в состояние непосредственно перед остановкой транспортного средства (время t2) после того, как выполняется переключение с фрикционного торможения на рекуперативное торможение (время tc). Следовательно, далее описываются операции электрического транспортного средства 100 во времена tc и t2, и описания других времен опускаются.
[0184] Во-первых, работа электрического транспортного средства 100 во время tc, в которое способ торможения переключается с фрикционного торможения на рекуперативное торможение на дороге, идущей в подъем.
[0185] Со ссылкой на фиг. 13 (a1), во время tc, частота ωm вращения мотора монотонно уменьшается, и темп уменьшения не изменяется. Это обусловлено тем, что до и после времени tc, выполняется только переключение способа торможения, и тормозная сила, сформированная в электрическом транспортном средстве 100, не изменяется.
[0186] Если описывать подробнее, со ссылкой на процесс вычисления значений команд управления на фиг. 8, рекуперативная электрическая мощность равна нулю перед временем tc (S801: "Да"), положительный зарядный ток Ic вычисляется (S802), и фрикционное торможение выбирается (S803: "Да"). Затем значение Tb* команды управления крутящим моментом трения становится значением, найденным посредством выполнения процесса фильтрации для значения Tm3* третьего целевого крутящего момента (S804 и S806).
[0187] С другой стороны, во время tc рекуперативная электрическая мощность равна нулю (S801: "Да"), зарядный ток Ic нуля вычисляется (S802), и рекуперативное торможение выбирается (S803: "Нет"). Затем значение Tm* команды управления крутящим моментом мотора становится значением, найденным посредством выполнения процесса фильтрации для значения Tm3* третьего целевого крутящего момента (S805 и S806).
[0188] Таким образом, перед временем tc, фрикционное торможение на основе значения Tm3* третьего целевого крутящего момента выполняется, и во время и после времени tc, способ торможения постепенно переключается на рекуперативное торможение на основе значения Tm3* третьего целевого крутящего момента. Соответственно, до и после времени tc, тогда как способы торможения отличаются, тормозная сила, сформированная в электрическом транспортном средстве 100, не изменяется. Соответственно, во время tc, градиент уменьшения частоты ωm вращения мотора не изменяется.
[0189] Со ссылкой на фиг. 13 (a2), во время tc, значение Tm3* третьего целевого крутящего момента является предварительно определенным отрицательным значением, аналогично времени t0.
[0190] Значение Tm* команды управления крутящим моментом мотора равно нулю во время tc и сходится к значению Tm3* третьего целевого крутящего момента с течением времени после времени tc.
[0191] Такие изменения значения Tm3* третьего целевого крутящего момента и значения Tm* команды управления крутящим моментом мотора являются аналогичными изменениям значения Tm3* третьего целевого крутящего момента и значения Tm* команды управления крутящим моментом мотора во время tc на фиг. 11 (a2), описанном выше. Следовательно, использование описания на фиг. 11 (a2) позволяет составлять описание.
[0192] Со ссылкой на фиг. 13 (a3), значение Tb* команды управления крутящим моментом трения является значением, найденным посредством присоединения знака минус к значению Tm3* третьего целевого крутящего момента во время tc, и сходится к нулю с течением времени после времени tc.
[0193] Такое изменение значения Tb* команды управления крутящим моментом трения является аналогичным изменению значения Tb* команды управления крутящим моментом трения во время tc на фиг. 11 (a3), как описано выше. Следовательно, использование описания на фиг. 11 (a3) позволяет составлять описание.
[0194] Со ссылкой на фиг. 13 (a4), во время tc, как проиллюстрировано на фиг. 13 (a1), частота ωm вращения мотора монотонно уменьшается. Следовательно, ускорение a является постоянным отрицательным значением.
[0195] В дальнейшем описывается работа электрического транспортного средства 100 во время t2, в которое электрическое транспортное средство 100 переходит в состояние непосредственно перед остановкой транспортного средства на дороге, идущей в подъем.
[0196] Со ссылкой на фиг. 13 (a1), во время t2, электрическое транспортное средство 100 переходит в состояние непосредственно перед остановкой транспортного средства. Следовательно, темп уменьшения частоты ωm вращения мотора начинает замедляться таким образом, чтобы останавливаться плавно.
[0197] Со ссылкой на фиг. 13 (a2), значение Tm* команды управления крутящим моментом мотора совпадает со значением Tm3* третьего целевого крутящего момента. Это обусловлено тем, что в процессе вычисления значений команд управления, проиллюстрированном на фиг. 8, рекуперативная электрическая мощность равна нулю (S801: "Да"), отрицательный зарядный ток Ic вычисляется на S802 (S802), рекуперативное торможение выбирается (S803: "Нет"), и значение Tm* команды управления крутящим моментом мотора становится значением, соответствующим значению Tm3* третьего целевого крутящего момента (S805 и S806).
[0198] Со ссылкой на фиг. 13 (a3), во время t2 рекуперативное торможение выполняется. Следовательно, значение Tb* команды управления крутящим моментом трения становится нулевым (S805 и S806).
[0199] Со ссылкой на фиг. 13 (a4), во время t2 электрическое транспортное средство 100, переходящее в состояние момента непосредственно перед остановкой транспортного средства, уменьшает градиент уменьшения частоты ωm вращения мотора, как проиллюстрировано на фиг. 13 (a1). Следовательно, ускорение a постепенно увеличивается с отрицательного значения.
[0200] Следует отметить, что тогда как на (a) дороге, идущей в подъем, вышеописанные процессы выполняются в соответствующие времена, идентичные операции выполняются в идентичное время с (a) дорогой, идущей в подъем, а также на (b) ровной дороге и на (c) дороге, идущей под спуск. Следует отметить, что оцененное значение Td возмущающего крутящего момента является значением, вызываемым посредством градиента. Как проиллюстрировано на фиг. 13 (b2), оцененное значение Td возмущающего крутящего момента равно нулю на (b) ровной дороге. Как проиллюстрировано на фиг. 13 (c2), оцененное значение Td возмущающего крутящего момента является отрицательным на (c) дороге, идущей под спуск.
[0201] Следует отметить, что контроллер 14 мотора может прогнозировать значение зарядного тока Ic с использованием уравнения, которое моделирует рекуперативную электрическую мощность мотора 1 и потребление мощности электрического транспортного средства 100.
[0202] Первый вариант осуществления предоставляет следующие преимущества.
[0203] Транспортное средство, которое выполняет приведение в действие и торможение мотора согласно степени открытия педали акселератора, должно останавливаться посредством регулирования тормозной силы, соответствующей возмущениям. Тем не менее, в этом варианте осуществления, непосредственно перед остановкой транспортного средства, рекуперативное торможение, которое имеет превосходную контролируемость (к примеру, скорость отклика при управлении и точность управления) относительно фрикционного торможения, выполняется для того, чтобы надлежащим образом выполнять торможение, соответствующее возмущениям. Следовательно, электрическое транспортное средство 100 может быть остановлено плавно.
[0204] Устройство управления электрического транспортного средства в первом варианте осуществления включает в себя мотор 1, модуль 7 фрикционного торможения и контроллер 14 мотора. Мотор 1 формирует движущую силу или рекуперативную тормозную силу электрического транспортного средства 100. Модуль 7 фрикционного торможения формирует фрикционную тормозную силу. Контроллер 14 мотора управляет, по меньшей мере, одним из мотора 1 и модуля 7 фрикционного торможения согласно степени открытия педали акселератора.
[0205] Здесь, со ссылкой на процесс вычисления значений команд управления на фиг. 8, контроллер 14 мотора вычисляет зарядный ток Ic, который протекает к аккумулятору 2, когда рекуперативное торможение выполняется (S802) и определяет положительную или отрицательную часть для вычисленного зарядного тока Ic (S803). Когда рекуперативная электрическая мощность, вырабатываемая посредством мотора 1, превышает потребление мощности в электрическом транспортном средстве 100, когда тормозная сила формируется только посредством мотора 1, зарядный ток Ic становится положительным. С другой стороны, когда рекуперативная электрическая мощность, вырабатываемая посредством мотора 1, опускается ниже потребления мощности в электрическом транспортном средстве 100, зарядный ток Ic становится отрицательным. Соответственно, определение положительной или отрицательной части для зарядного тока Ic (S803) обеспечивает определение того, потребляется или нет вся рекуперативная электрическая мощность, вырабатываемая посредством мотора 1, в электрическом транспортном средстве 100, когда тормозная сила формируется только посредством мотора 1.
[0206] Когда рекуперативная электрическая мощность Pin равна нулю (S801: "Да"), аккумулятор 2 возможно избыточно заряжается, если выполняется рекуперативное торможение. Тем не менее, даже когда рекуперативная электрическая мощность Pin равна нулю, когда зарядный ток Ic, который протекает к аккумулятору 2, когда рекуперативное торможение выполняется, вычисляется как отрицательный, т.е. когда вся рекуперативная электрическая мощность мотора 1 потребляется посредством мотора 1 и инвертора 3 в электрическом транспортном средстве 100 (S803: "Нет"), аккумулятор 2 не заряжается, даже если выполняется рекуперативное торможение. Следовательно, даже если рекуперативная электрическая мощность Pin находится в состоянии нуля, контроллер 14 мотора выбирает рекуперативное торможение (S805) и инструктирует мотору 1 выполнять рекуперативное торможение.
[0207] Здесь, непосредственно перед тем, как электрическое транспортное средство 100 останавливается, поскольку скорость транспортного средства является близкой к нулю, рекуперативная электрическая мощность мотора 1 является небольшой. Следовательно, вся рекуперативная электрическая мощность потребляется в электрическом транспортном средстве 100, так что аккумулятор 2 разряжается, и зарядный ток Ic становится отрицательным. Таким образом, непосредственно перед тем, как электрическое транспортное средство 100 останавливается, зарядный ток Ic является постоянно отрицательным (S803: "Нет"), за счет этого обеспечивая выполнение рекуперативного торможения. Соответственно, электрическое транспортное средство 100 может быть остановлено посредством рекуперативного торможения (S805) независимо от того, какова оставшаяся величина заряда аккумулятора 2. Следовательно, вибрация при ускорении, когда электрическое транспортное средство 100 остановлено, может уменьшаться, и электрическое транспортное средство 100 может плавно замедляться до остановки.
[0208] В качестве модификации S802 и S803, выполняемых посредством контроллера 14 мотора в качестве устройства управления в первом варианте осуществления, контроллер 14 мотора может определять положительную или отрицательную часть для зарядного тока Ic с использованием таблицы зарядных токов на фиг. 9. Таблица зарядных токов иллюстрирует положительную или отрицательную часть для зарядного тока Ic на основе значения команды управления крутящим моментом мотора, соответствующего операции с акселератором, и частоты ωm вращения мотора, соответствующей состоянию движения электрического транспортного средства 100. Таким образом, только посредством значения Tm* команды управления крутящим моментом мотора и частоты ωm вращения мотора, может определяться положительная или отрицательная часть для зарядного тока Ic, за счет этого обеспечивая уменьшение нагрузки по арифметической обработке в контроллере 14 мотора.
[0209] Следует отметить, что, со ссылкой на таблицу зарядных токов на фиг. 9, когда частота ωm вращения мотора является значением около нуля, т.е. когда электрическое транспортное средство 100 находится в состоянии непосредственно перед остановкой, поскольку оно находится в области разряда независимо от абсолютной величины значения команды управления крутящим моментом мотора Tc, зарядный ток Ic является отрицательным.
[0210] Таким образом, в состоянии непосредственно перед тем, как электрическое транспортное средство 100 останавливается, поскольку зарядный ток Ic является отрицательным (S803: "Нет"), контроллер 14 мотора инструктирует мотору 1 выполнять рекуперативное торможение (S805). Соответственно, электрическое транспортное средство 100 может быть остановлено посредством рекуперативного торможения независимо от того, какова оставшаяся величина заряда аккумулятора 2. Следовательно, инструктирование мотору 1 выполнять рекуперативное торможение, когда зарядный ток Ic определяется как отрицательный с использованием таблицы зарядных токов, обеспечивает плавное замедление и остановку электрического транспортного средства 100.
[0211] С помощью контроллера 14 мотора, который представляет собой устройство управления первого варианта осуществления, со ссылкой на процесс вычисления значений команд управления на фиг. 8, на S806, процесс фильтрации выполняется для значения Tm** команды управления крутящим моментом мотора (перед процессом фильтрации) и значения Tb** команды управления крутящим моментом трения (перед процессом фильтрации), которые получаются на S804 или S805, за счет этого получая значение Tm* команды управления крутящим моментом мотора и значение Tb* команды управления крутящим моментом трения.
[0212] В этом процессе фильтрации, использование фильтра Hba(s) блока 1001 и фильтра Hinv(s) блока 1002 обеспечивает придание равномерности скорости отклика ускорения из крутящего момента мотора и скорости отклика ускорения из величины фрикционного торможения.
[0213] Соответственно, посредством использования блока 1001, учитывается скорость отклика модуля 7 фрикционного торможения, меньшая скорости отклика мотора 1 рассматривается. Таким образом, рекуперативная тормозная сила посредством мотора 1 уменьшается, с тем чтобы компенсировать задержку этой скорости отклика.
[0214] Здесь, посредством использования работы электрического транспортного средства 100 в то время, когда переход выполняется из области заряда в область разряда в таблице зарядных токов на фиг. 9, т.е. во время tc на фиг. 11-14, ниже описывается преимущество посредством вышеописанного процесса фильтрации посредством блока 1001. В это время tc, в процессе вычисления значений команд управления на фиг. 8, контроллер 14 мотора выполняет переключение с фрикционного торможения (S804) на рекуперативное торможение (S805).
[0215] В это время tc, значение Tb** команды управления крутящим моментом трения (перед процессом фильтрации), которое является значением команды управления в модуль 7 фрикционного торможения, значительно изменяется со значения на основе значения Tm3 третьего целевого крутящего момента (S804) на нуль (S805). Следовательно, во время tc, предпочтительно, чтобы крутящий момент фрикционного торможения посредством модуля 7 фрикционного торможения становился нулевым. Тем не менее, крутящий момент фрикционного торможения посредством модуля 7 фрикционного торможения становится значением, большим значения команды управления вследствие небольшой скорости отклика в модуле 7 фрикционного торможения.
[0216] Напротив, значение Tm** команды управления крутящим моментом мотора (перед процессом фильтрации), которое является значением команды управления в мотор 1, значительно изменяется с нуля (S804) до значения Tm3 третьего целевого крутящего момента (S805). Здесь, в блоке 1001 на фиг. 10 в процессе фильтра на S806, т.е. в значении Tm* команды управления крутящим моментом мотора после процесса в уравнении (12), небольшая скорость отклика в модуле 7 фрикционного торможения учитывается, чтобы уменьшать варьирование.
[0217] Следовательно, когда варьирование значения Tm* команды управления крутящим моментом мотора, выводимого из блока 1001, уменьшается, управление выполняется для того, чтобы формировать крутящий момент приведения в движение в моторе 1 таким образом, чтобы компенсировать фрикционную тормозную силу вследствие небольшой скорости отклика, сформированной в модуле 7 фрикционного торможения. Соответственно, когда переключение с фрикционного торможения на рекуперативное торможение во время tc выполняется, ускоренная вибрация и варьирование вследствие небольшой скорости отклика в модуле 7 фрикционного торможения могут уменьшаться.
[0218] В контроллере 14 мотора, который представляет собой устройство управления первого варианта осуществления, со ссылкой на процесс управления остановкой на фиг. 5, в блоке 502 оценки возмущающего крутящего момента, оцененное значение Td возмущающего крутящего момента, необходимое для электрического транспортного средства, чтобы удерживать состояние остановки транспортного средства, соответствующее возмущениям, которые действуют на электрическое транспортное средство 100, получается с использованием модели транспортного средства. Затем когда электрическое транспортное средство 100 находится в состоянии в момент непосредственно перед остановкой транспортного средства, значение Tm* команды управления крутящим моментом мотора, выводимое из сумматора 503, становится суммой крутящего F/B-момента Tω по частоте вращения мотора, выводимого из блока 501 задания крутящего F/B-момента по частоте вращения мотора, и оцененного значения Td возмущающего крутящего момента, выводимого из блока 502 оценки возмущающего крутящего момента.
[0219] Здесь, когда электрическое транспортное средство 100 находится в состоянии в момент непосредственно перед остановкой транспортного средства, крутящий F/B-момент Tω по частоте вращения мотора, выводимый из блока 501 задания крутящего F/B-момента по частоте вращения мотора, сходится к нулю. Соответственно, значение Tm* команды управления крутящим моментом мотора сходится к оцененному значению Td возмущающего крутящего момента, чтобы обеспечивать схождение крутящего момента, сформированного в моторе 1, к значению, соответствующему градиенту. Таким образом, электрическое транспортное средство 100 может плавно останавливаться. Кроме того, когда электрическое транспортное средство 100 останавливается, мотор 1 формирует крутящий момент, соответствующий влиянию возмущений, таких как градиент, который действует на электрическое транспортное средство 100. Таким образом, даже в позиции, имеющей градиент, состояние остановки транспортного средства может поддерживаться без использования педали тормоза.
[0220] Второй вариант осуществления
Далее описывается устройство управления второго варианта осуществления. Этот вариант осуществления описывает случай, в котором время, в которое способ торможения переключается с фрикционного торможения на рекуперативное торможение, отличается от времени в первом варианте осуществления.
[0221] Фиг. 15 является схемой конфигурации электрического транспортного средства 100, включающего в себя контроллер 14 мотора в качестве устройства управления второго варианта осуществления.
[0222] Со ссылкой на фиг. 15, электрическое транспортное средство 100 второго варианта осуществления отличается от электрического транспортного средства 100 первого варианта осуществления, проиллюстрированного на фиг. 1, тем, что рекуперативная электрическая мощность Pin не выводится из контроллера 13 аккумулятора в контроллер 14 мотора.
[0223] Контроллер 14 мотора предварительно сохраняет указанное значение SOC (SOC0), используемое для получения распределения по времени переключения между фрикционным торможением и рекуперативным торможением. Следует отметить, что указанное значение SOC (SOC0) может получаться следующим образом.
[0224] Во-первых, электрическая энергия заряда аккумулятора 2 в период после того, как электрическое транспортное средство 100 переходит в состояние непосредственно перед остановкой транспортного средства, и до того, как электрическое транспортное средство 100 переключается в состояние одинаковой мощности, в котором рекуперативная электрическая мощность мотора 1 равна потреблению мощности электрического транспортного средства 100, получается в качестве указанной электрической энергии Ws0 заряда с помощью вычисления или эксперимента. Следует отметить, что состояние одинаковой мощности соответствует границам между областью заряда и областью разряда в таблице зарядных токов на фиг. 9.
[0225] Здесь, указанная электрическая энергия Ws0 заряда отличается, например, в зависимости от градиента поверхности дороги и рабочей точки мотора 1. Следовательно, согласно комбинациям градиента, рабочей точки мотора 1 и т.п., которые возможно рассматриваются, множество электрических мощностей заряда аккумулятора 2, до тех пор, пока электрическое транспортное средство 100 не переключается в состояние одинаковой мощности, вычисляются, например, с помощью эксперимента или вычисления. Максимальное значение из этих вычисленных значений может получаться в качестве указанной электрической энергии Ws0 заряда.
[0226] Затем с использованием указанной электрической энергии Ws0 заряда и максимальной емкости Wmax аккумулятора 2, SOC0 в качестве указанного значения SOC получается в следующем уравнении (15).
[0227] уравнение 17

[0228] Когда этот вариант осуществления сравнивается с первым вариантом осуществления, для процессов посредством контроллера 14 мотора, процессы, проиллюстрированные на фиг. 3, фиг. 6 и фиг. 7, являются идентичными, а процесс управления остановкой на фиг. 5 и процесс вычисления значений команд управления на фиг. 8 отличаются. Следовательно, далее описывается процесс управления остановкой и процесс вычисления значений команд управления.
[0229] Фиг. 16 является блок-схемой, иллюстрирующей процесс управления остановкой второго варианта осуществления.
[0230] Процесс управления остановкой, проиллюстрированный на фиг. 16, по сравнению с процессом управления остановкой первого варианта осуществления, проиллюстрированным на фиг. 5, отличается тем, что SOC, а не рекуперативная электрическая мощность Pin, вводится в блок 505 вычисления значений команд управления, тем, что дополнительно вводятся значение Tm1* первого целевого крутящего момента и значение Tm2* второго целевого крутящего момента, и тем, что частота ωm вращения мотора не вводится, и другие конфигурации являются идентичными.
[0231] Фиг. 17 является блок-схемой последовательности операций способа, иллюстрирующей процесс вычисления значений команд управления второго варианта осуществления.
[0232] Процесс вычисления значений команд управления, проиллюстрированный на фиг. 17, по сравнению с процессом вычисления значений команд управления первого варианта осуществления, проиллюстрированным на фиг. 8, S801-S803 удаляются, и S1701 и S1702 добавляются.
[0233] На этапе S1701, контроллер 14 мотора определяет то, находится он или нет в состоянии непосредственно перед остановкой транспортного средства, посредством сравнения значения Tm1* первого целевого крутящего момента со значением Tm2* второго целевого крутящего момента, чтобы определять то, начинается или нет рекуперативное торможение.
[0234] Когда значение Tm1* первого целевого крутящего момента превышает значение Tm2* второго целевого крутящего момента (S1701: "Да"), электрическое транспортное средство 100 определяется не в состоянии непосредственно перед остановкой транспортного средства. В таком случае, контроллер 14 мотора переводит процесс на S1702.
[0235] С другой стороны, когда значение Tm1* первого целевого крутящего момента равно или меньше значения Tm2* второго целевого крутящего момента (S1701: "Нет"), электрическое транспортное средство 100 определяется в состоянии непосредственно перед остановкой транспортного средства. В таком случае, контроллер 14 мотора переводит процесс на S805, чтобы выполнять рекуперативное торможение.
[0236] На этапе S1702, блок 505 вычисления значений команд управления определяет то, равно или превышает либо нет SOC, передаваемое из контроллера 13 аккумулятора, указанное значение SOC.
[0237] Когда SOC равно или превышает указанное значение SOC (S1702: "Да"), контроллер 14 мотора выбирает фрикционное торможение, чтобы переводить процесс на S804.
[0238] С другой стороны, когда SOC меньше указанного значения SOC (S1702: "Нет"), контроллер 14 мотора выбирает рекуперативное торможение, чтобы переводить процесс на S805.
[0239] Здесь, процессы на S1701 и S1702 описываются посредством отделения случая, в котором электрическое транспортное средство 100 находится в обычном состоянии движения, а не в состоянии непосредственно перед остановкой транспортного средства, от случая, в котором электрическое транспортное средство 100 находится в состоянии непосредственно перед остановкой транспортного средства.
[0240] Во-первых, описывается случай, в котором электрическое транспортное средство 100 находится в обычном состоянии движения.
[0241] На S1701, электрическое транспортное средство 100 находится в обычном состоянии движения, а не в состоянии непосредственно перед остановкой транспортного средства. Поскольку значение Tm1* первого целевого крутящего момента превышает значение Tm2* второго целевого крутящего момента (S1701: "Да"), контроллер 14 мотора переводят процесс в процесс на S1702.
[0242] На S1702, когда SOC равно или превышает указанное значение SOC (S1702: "Да"), фрикционное торможение выбирается, чтобы переводить процесс на S804. С другой стороны, когда SOC меньше указанного значения SOC (S1702: "Нет"), рекуперативное торможение выбирается, чтобы переводить процесс на S805.
[0243] Соответственно, когда электрическое транспортное средство 100 находится в обычном состоянии движения, такие процессы выполняются для того, чтобы заряжать аккумулятор 2 вплоть до емкости, при которой SOC не превышает указанное значение SOC. Соответственно, в то время, когда электрическое транспортное средство 100 переключается в состояние в момент непосредственно перед остановкой транспортного средства из состояния движения, SOC аккумулятора 2 не превышает указанное значение SOC и становится значением, близким к указанному значению SOC.
[0244] Далее описывается случай, в котором электрическое транспортное средство 100 находится в состоянии непосредственно перед остановкой транспортного средства.
[0245] На S1701, электрическое транспортное средство 100 находится в состоянии непосредственно перед остановкой транспортного средства. Поскольку значение Tm1* первого целевого крутящего момента равно или меньше значения Tm2* второго целевого крутящего момента (S1701: "Нет"), контроллер 14 мотора выбирает рекуперативное торможение, чтобы переводить процесс в процесс на S805.
[0246] Как описано выше, в состоянии непосредственно перед остановкой транспортного средства, SOC аккумулятора 2 не превышает указанное значение SOC. Следовательно, в аккумуляторе 2, имеется доступная емкость, равная или большая указанной электрической энергии Ws0 заряда.
[0247] Соответственно, в состоянии непосредственно перед остановкой транспортного средства (S1701: "Нет") таким образом, что контроллер 14 мотора выбирает рекуперативное торможение (S805), даже если аккумулятор 2 заряжается посредством указанной электрической энергии Ws0 заряда до переключения в состояние одинаковой мощности, аккумулятор 2 не заряжается избыточно.
[0248] Как описано выше, на S1701 и S1702, контроллер 14 мотора формирует рекуперативную тормозную силу посредством мотора 1 от момента времени, когда электрическое транспортное средство 100 переходит в состояние непосредственно перед остановкой транспортного средства, за счет этого начиная управление остановкой транспортного средства, чтобы останавливать электрическое транспортное средство 100 (S1701: "Нет", S805). В таком случае, после того, как управление остановкой начинается, и до того, как рекуперативная электрическая мощность посредством мотора 1 и потребление мощности, потребляемой посредством электрического транспортного средства 100, становятся одинаковыми, аккумулятор 2 должен заряжаться посредством указанной электрической энергии Ws0 заряда. Следовательно, до того, как электрическое транспортное средство 100 переключается в состояние непосредственно перед остановкой транспортного средства, то есть до того, как начинается управление остановкой транспортного средства, так что доступная емкость аккумулятора 2 становится равной или превышающей указанную электрическую энергию Ws0 заряда, формирование рекуперативной тормозной силы посредством мотора 1 управляется (S1701: "Да", S1702).
[0249] Следует отметить, что в этом варианте осуществления, процессы на S801-S803 на фиг. 8 в первом варианте осуществления не выполняются. Тем не менее, процессы на S801-S803 могут выполняться. Например, даже в случае, если SOC аккумулятора 2 превышает указанное значение SOC, когда электрическое транспортное средство 100 переключается в состояние непосредственно перед остановкой транспортного средства (S1701: "Нет"), рекуперативное торможение возможно выполняется (S805). В таком случае, до переключения в состояние одинаковой мощности, SOC аккумулятора 2 возможно становится 100%, чтобы избыточно заряжать аккумулятор 2. Тем не менее, посредством выполнения процессов на S801-S803, когда аккумулятор 2 полностью заряжен, рекуперативная электрическая мощность Pin равна нулю (S801). Таким образом, в зависимости от размера зарядного тока Ic, выбирается фрикционное торможение или рекуперативное торможение (S802 на S805). Соответственно, это позволяет предотвращать избыточный заряд аккумулятора 2, аналогично первому варианту осуществления.
[0250] Контроллер 13 аккумулятора и контроллер 14 мотора могут включать в себя устройство управления зарядом, которое управляет зарядом аккумулятора 2 таким образом, что SOC аккумулятора 2 равно или меньше указанного значения SOC перед предварительно определенным временем. Например, в случае если электрическое транспортное средство 100 движется на автостраде и т.п., и скорость транспортного средства превышает предварительно определенную нижнюю предельную скорость, устройство управления зарядом выполняет рекуперативное торможение таким образом, что SOC не превышает указанное значение SOC. Таким образом, поскольку доступная емкость аккумулятора 2 равна или превышает указанную электрическую энергию Ws0 заряда в области высоких скоростей транспортного средства, транспортное средство может останавливаться посредством рекуперативного торможения и дополнительно посредством увеличения оставшейся величины заряда аккумулятора 2, проезжаемое расстояние электрического транспортного средства 100 может продлеваться.
[0251] В этом варианте осуществления, время, когда значение Tm1* первого целевого крутящего момента становится меньше значения Tm2* второго целевого крутящего момента, является временем, чтобы начинать рекуперативное торможение, посредством предположения в качестве времени, когда электрическое транспортное средство 100 переключается в состояние непосредственно перед остановкой транспортного средства. Тем не менее, это не ограничено этим. Например, время, когда скорость электрического транспортного средства 100 становится равной или меньше предварительно определенной скорости (например, 20 км/ч), может быть временем, чтобы начинать рекуперативное торможение, посредством предположения в качестве времени, когда электрическое транспортное средство 100 переключается в низкоскоростное состояние. В таком случае, контроллер 14 мотора, в качестве указанной электрической энергии Ws0 заряда, предварительно накапливает электрическую мощность, посредством которой заряжается аккумулятор 2 после того, как скорость электрического транспортного средства 100 становится равной или меньше предварительно определенной скорости, и до переключения в состояние одинаковой мощности. Затем на S1701 определяется то, превышает или нет скорость электрического транспортного средства 100 предварительно определенную скорость.
[0252] Ниже описывается преимущество посредством второго варианта осуществления со ссылкой на таблицу зарядных токов на фиг. 18.
[0253] Фиг. 18 является примерной таблицей зарядных токов, в которой изменение состояния движения электрического транспортного средства 100 согласно варианту осуществления указывается с пунктирной линией.
[0254] Например, во время t2, определяется то, что электрическое транспортное средство 100 находится в состоянии непосредственно перед остановкой транспортного средства (S1701: "Нет"). В таком случае, электрическое транспортное средство 100 переходит в состояние непосредственно перед остановкой транспортного средства, и до того, как рекуперативная электрическая мощность и потребление мощности становятся равными, то есть до достижения границы между областью разряда и областью заряда, аккумулятор 2 должен заряжаться посредством указанной электрической энергии Ws0 заряда. Как описано выше, когда электрическое транспортное средство 100 находится в состоянии в момент непосредственно перед остановкой транспортного средства, SOC равно или меньше указанного значения SOC. Таким образом, поскольку доступная емкость аккумулятора 2 равна или превышает указанную электрическую энергию Ws0 заряда, контроллер 14 мотора начинает рекуперативное торможение (S805). Соответственно, в этом варианте осуществления, рекуперативное торможение начинается со времени t2.
[0255] С другой стороны, в первом варианте осуществления, например, со ссылкой на фиг. 12(b), рекуперативное торможение начинается со времени tc, когда переход выполняется из области заряда в область разряда. Следовательно, во втором варианте осуществления, время для того, чтобы выполнять рекуперативное торможение, является большим по сравнению с первым вариантом осуществления. Соответственно, транспортное средство может останавливаться посредством рекуперативного торможения независимо от оставшейся величины заряда аккумулятора 2, и дополнительно, возможность выполнять рекуперативное торможение возрастает. Таким образом, ускоренная вибрация и варьирование дополнительно могут уменьшаться, когда транспортное средство останавливается.
[0256] Следует отметить, что в процессе вычисления значений команд управления на фиг. 17, посредством дополнительного выполнения процессов на S801-S803 в первом варианте осуществления, можно предотвращать избыточный заряд аккумулятора 2. После того, как электрическое транспортное средство 100 переходит в состояние непосредственно перед остановкой транспортного средства, и дополнительно, даже в области разряда в таблице зарядных токов, как проиллюстрировано на фиг. 18 и т.п., рекуперативное торможение может выполняться. Кроме того, поскольку возможность выполнять рекуперативное торможение возрастает, ускоренная вибрация и варьирование дополнительно могут уменьшаться, когда транспортное средство останавливается.
[0257] Согласно контроллеру 14 мотора, который представляет собой устройство управления второго варианта осуществления, до того, как электрическое транспортное средство 100 переключается в состояние в момент непосредственно перед остановкой транспортного средства, заряд аккумулятора 2 управляется таким образом, что доступная емкость аккумулятора 2 равна или превышает указанную электрическую энергию Ws0 заряда. Следовательно, когда электрическое транспортное средство 100 переключается в состояние непосредственно перед остановкой (S1701: "Да"), SOC аккумулятора 2 равно или меньше указанного значения SOC. Таким образом, даже если рекуперативное торможение выполняется (S805), аккумулятор 2 не заряжается избыточно.
[0258] Второй вариант осуществления предоставляет следующие преимущества.
[0259] Устройство управления электрического транспортного средства второго варианта осуществления, когда электрическое транспортное средство 100 доходит до момента непосредственно перед остановкой транспортного средства, формирует рекуперативную тормозную силу посредством мотора 1, чтобы начинать управление остановкой транспортного средства, чтобы останавливать электрическое транспортное средство 100 (S1701: "Нет", S805). После того, как это управление остановкой транспортного средства начинается, и до того, как рекуперативная электрическая мощность и потребление мощности, потребляемое в электрическом транспортном средстве 100, становятся равными, аккумулятор 2 заряжается посредством указанной электрической энергии Ws0 заряда. Следовательно, посредством состояния непосредственно перед остановкой транспортного средства, т.е. посредством начала управления остановкой транспортного средства, формирование рекуперативной тормозной силы посредством мотора 1 управляется таким образом, что доступная емкость аккумулятора 2 равна или превышает указанную электрическую энергию Ws0 заряда (S1701: "Да", S1702).
[0260] Таким образом, в момент времени, когда рекуперативная электрическая мощность и потребление мощности в электрическом транспортном средстве 100 становятся равными, аккумулятор 2 заряжается посредством указанной электрической энергии Ws0 заряда, так что аккумулятор переводится в состояние полного заряда. Таким образом, по сравнению с первым вариантом осуществления, проезжаемое расстояние электрического транспортного средства 100 в состоянии остановки транспортного средства может задаваться большим. Посредством выполнения рекуперативного торможения до того, как рекуперативная электрическая мощность и потребление мощности, потребляемое посредством электрического транспортного средства 100, становятся равными, время для того, чтобы выполнять рекуперативное торможение до тех пор, пока электрическое транспортное средство 100 не останавливается, не может задаваться большим. Таким образом, электрическое транспортное средство 100 может еще более плавно останавливаться.
[0261] Третий вариант осуществления
Далее приводится описание электрического транспортного средства 100, которое включает в себя устройство управления третьего варианта осуществления. Во втором варианте осуществления, в качестве указанной электрической энергии Ws0 заряда, предварительно прогнозируется рекуперативная электрическая энергия, вырабатываемая между моментом времени, в который электрическое транспортное средство 100 переключается в состояние непосредственно перед остановкой транспортного средства, и моментом времени, в который транспортное средство останавливается. В этом варианте осуществления, приводится описание примера, в котором электрическая энергия Ws заряда прогнозируется согласно состоянию движения электрического транспортного средства 100.
[0262] Электрическое транспортное средство 100 третьего варианта осуществления имеет конфигурацию, идентичную конфигурации электрического транспортного средства 100 первого варианта осуществления, проиллюстрированного на фиг. 1. В таком случае, пояснение конфигурации опускается.
[0263] Когда этот вариант осуществления сравнивается с первым вариантом осуществления, процессы, проиллюстрированные на фиг. 3, фиг. 5, фиг. 6 и фиг. 7, являются идентичными, а процесс вычисления значений команд управления на фиг. 8 отличается. Следовательно, далее описывается только процесс вычисления значений команд управления и опускает пояснение других процессов.
[0264] Фиг. 19 является видом, иллюстрирующим процесс вычисления значений команд управления третьего варианта осуществления.
[0265] Процесс вычисления значений команд управления, проиллюстрированный на фиг. 19, по сравнению с процессом вычисления значений команд управления первого варианта осуществления, проиллюстрированного на фиг. 8, S801-S803 удаляются, и S1901 и S1902 добавляются.
[0266] На этапе S1901, блок 505 вычисления значений команд управления использует значение Tm3* третьего целевого крутящего момента, частоту ωm вращения мотора и таблицу рекуперативной электрической мощности для остановки транспортного средства на фиг. 20, чтобы прогнозировать электрическую энергию Ws заряда аккумулятора 2 до тех пор, пока рекуперативная электрическая мощность не становится эквивалентной потреблению мощности, как в состоянии одинаковой мощности, когда начинается рекуперативное торможение.
[0267] Здесь, фиг. 20 иллюстрирует таблицу электрической энергии заряда, в которой значение Tm* команды управления крутящим моментом мотора и частота ωm вращения мотора соответствуют электрической энергии Ws заряда. Горизонтальная ось указывает частоту ωm вращения мотора, а вертикальная ось указывает значение Tm* команды управления крутящим моментом мотора. Примерное состояние движения электрического транспортного средства 100 согласно варианту осуществления указывается посредством пунктирной линии. Следует отметить, что электрическая энергия Ws заряда на чертеже является просто примером и не ограничена значением.
[0268] На фиг. 20, в случае если рекуперативное торможение начинается, линии одинаковой электрической мощности используются для того, чтобы указывать электрическую энергию Ws заряда аккумулятора 2 в период времени, в который рекуперативная электрическая мощность мотора 1 становится эквивалентной потреблению мощности в электрическом транспортном средстве 100, т.е. до достижения границы области заряда и области разряда. Например, когда позиция, указываемая посредством частоты ωm вращения мотора и значения Tm команды управления крутящим моментом мотора электрического транспортного средства 100, находится на линии одинаковой электрической мощности в 200 Вт⋅ч, электрическая мощность, заряженная в аккумуляторе 2 до того, как рекуперативная электрическая мощность становится эквивалентной потреблению мощности после начала рекуперативного торможения, составляет 200 Вт⋅ч. Следует отметить, что граница области заряда и области разряда является линией одинаковой электрической мощности в 0 Вт⋅ч.
[0269] Контроллер 14 мотора получает электрическую энергию Ws заряда на основе такого эталонного участка значения Tm* команды управления крутящим моментом мотора и частоты ωm вращения мотора в таблице электрической энергии заряда на фиг. 20. Следует отметить, что когда линия одинаковой электрической мощности не существует в эталонном участке, электрическая энергия Ws заряда может прогнозироваться согласно, например, отношению расстояний между эталонным участком и двумя линиями одинаковой электрической мощности через эталонный участок.
[0270] Снова со ссылкой на фиг. 19, на этапе S1902, блок 505 вычисления значений команд управления сравнивает электрическую энергию Ws заряда с величиной доступной емкости аккумулятора 2 и выбирает рекуперативное торможение (S805) посредством мотора 1 или фрикционное торможение (S804) посредством модуля 7 фрикционного торможения согласно результату сравнения.
[0271] Когда электрическая энергия Ws заряда превышает доступную емкость аккумулятора 2 (S1902: "Да"), контроллер 14 мотора определяет то, что начало рекуперативного торможения обуславливает то, что электрическая энергия Ws заряда до тех пор, пока рекуперативная электрическая мощность не становится эквивалентной потреблению мощности, превышает доступную емкость аккумулятора 2, за счет этого возможно чрезмерно заряжая аккумулятор 2. Следовательно, контроллер 14 мотора выбирает фрикционное торможение, чтобы переводить процесс на S804.
[0272] С другой стороны, когда электрическая энергия Ws заряда равна или меньше доступной емкости аккумулятора 2 (S1902: "Нет"), контроллер 14 мотора определяет то, что начало рекуперативного торможения обуславливает надлежащий заряд аккумулятора 2 без чрезмерного заряда. Следовательно, контроллер 14 мотора выбирает рекуперативное торможение, чтобы переводить процесс на S805.
[0273] Здесь, со ссылкой на фиг. 20, описывается работа электрического транспортного средства 100. На фиг. 20, состояние движения электрического транспортного средства 100, едущего по ровной дороге, указывается посредством пунктирной линии. Следует отметить, что для удобства, допустим, что доступная емкость аккумулятора 2 составляет 200 Вт⋅ч и не варьируется.
[0274] Во время t1, электрическая энергия Ws заряда составляет 300 Вт⋅ч. Соответственно, поскольку электрическая энергия Ws заряда (300 Вт⋅ч) превышает доступную емкость аккумулятора 2 (200 Вт⋅ч) (S1902: "Да"), контроллер 14 мотора определяет то, что начало рекуперативного торможения, возможно, обуславливает чрезмерный заряд аккумулятора 2, за счет этого выбирая фрикционное торможение (S804).
[0275] Во время tc, электрическая энергия Ws заряда составляет 200 Вт⋅ч. Поскольку электрическая энергия Ws заряда становится эквивалентной доступной емкости аккумулятора 2 (200 Вт⋅ч) (S1902: "Нет"), контроллер 14 мотора начинает рекуперативное торможение. После времени tc, выполняется рекуперативное торможение.
[0276] Во время t2, электрическое транспортное средство 100 переключается в состояние непосредственно перед остановкой транспортного средства, и значение Tm3* третьего целевого крутящего момента, которое представляет собой значение команды управления крутящим моментом мотора, начинается сходиться к оцененному значению Td возмущающего крутящего момента (нулю). Следовательно, скорость транспортного средства для электрического транспортного средства 100 постепенно сходится к нулю.
[0277] Во время t5, электрическое транспортное средство 100 полностью останавливается.
[0278] Третий вариант осуществления предоставляет следующие преимущества.
[0279] Со ссылкой на управление вычислением значений команд управления на фиг. 19, контроллер 14 мотора в качестве устройства управления для электрического транспортного средства согласно третьему варианту осуществления вычисляет электрическую энергию Ws заряда в качестве электрической мощности, заряженной в аккумуляторе 2 до того, как рекуперативная мотора 1 становится эквивалентной потреблению мощности электрического транспортного средства 100, когда электрическое транспортное средство 100 начинает рекуперативное торможение (S1901). Затем когда электрическая энергия Ws заряда равна или меньше доступной емкости аккумулятора 2, т.е. доступная емкость аккумулятора 2 превышает электрическую энергию Ws заряда (1902: "Нет"), рекуперативное торможение выбирается (S805). Следовательно, электрическая энергия Ws заряда, эквивалентная доступной емкости аккумулятора 2, заряжается в аккумуляторе 2 до того, как рекуперативная электрическая мощность становится эквивалентной потреблению мощности.
[0280] Доступная емкость аккумулятора 2, используемая для определения на S1902 в процессе вычисления значений команд управления на фиг. 19, равна нулю или положительному значению. Со ссылкой на таблицу зарядных токов на фиг. 20, электрическая энергия Ws заряда сходится к нулю до того, как электрическое транспортное средство 100 замедляется, чтобы достигать границы области заряда и области разряда. Затем, до того, как электрическое транспортное средство 100 останавливается, электрическая энергия Ws заряда всегда становится ниже доступной емкости аккумулятора 2, за счет этого выполняя рекуперативное торможение. Соответственно, помимо того, что электрическое транспортное средство 100 всегда останавливается вследствие рекуперативного торможения независимо от оставшейся величины заряда аккумулятора 2, аккумулятор 2 дополнительно заряжается в области заряда на фиг. 20 таким образом, что он переключается в состояние полного заряда при переходе в область разряда, за счет этого обеспечивая продление проезжаемого расстояния электрического транспортного средства 100.
[0281] Вариант осуществления настоящего изобретения, описанный выше, просто описывает некоторые примеры вариантов применения настоящего изобретения, и не имеет намерения ограничивать объем настоящего изобретения конкретными конструкциями вышеописанного варианта осуществления.
Реферат
Группа изобретений относится к электродинамическим тормозным системам для транспортных средств. Устройство управления приводом электрического транспортного средства, содержащего мотор, модуль фрикционного торможения, аккумулятор. Устройство управления формирует тормозную силу согласно степени открытия педали акселератора для замедления транспортного средства. Причем устройство управления приводом содержит контроллер, выполненный с возможностью управлять мотором и модулем фрикционного торможения согласно степени открытия педали акселератора. При этом контроллер определяет, является аккумулятор рекуперативным или нет, на основе доступной емкости аккумулятора. Контроллер формирует тормозную силу посредством мотора, когда контроллер определяет то, что аккумулятор не является рекуперативным на основе доступной емкости аккумулятора. Контроллер формирует рекуперативную тормозную силу посредством мотора, когда аккумулятор не является рекуперативным, и зарядный ток, который протекает к аккумулятору, является отрицательным. Также заявлен способ управления приводом электрического транспортного средства. Технический результат заключается в обеспечении плавной остановки транспортного средства, когда аккумулятор полностью заряжен. 2 н. и 6 з.п. ф-лы, 21 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ управления рекуперативным торможением транспортного средства, содержащего по меньшей мере один электрический двигатель
Комментарии