Способ и устройство для управления электромотором электрического транспортного средства - RU2723661C1
Код документа: RU2723661C1
Чертежи









Описание
Область техники
Настоящее изобретение относится к способу управления электромотором электрического транспортного средства и к устройству управления электромотором электрического транспортного средства.
Уровень техники
Предусмотрена известная технология в системе управления ускорением/замедлением транспортного средства, посредством которой замедление управляется в соответствии с рабочей величиной нажатия педали акселератора, когда рабочая величина нажатия педали акселератора меньше заданного значения, и ускорение управляется в соответствии с рабочей величиной нажатия педали акселератора, когда рабочая величина нажатия педали акселератора составляет заданное значение или больше (см. JP 2000-205015 A). С помощью системы управления ускорением/замедлением, можно задавать целевое ускорение/замедление в соответствии с рабочей величиной нажатия педали акселератора. Следовательно, при рабочей величине нажатия педали акселератора, имеющей целевое ускорение/замедление, которое задается равным 0, можно поддерживать постоянную скорость транспортного средства даже на дороге с градиентом без необходимости регулирования рабочей величины нажатия педали акселератора.
Сущность изобретения
Здесь, в JP 2000-205015 A, чтобы сдерживать изменения ускорения/замедления и скорости, которые изменяются по мере того, как градиент поверхности дороги, по которой движется транспортное средство, изменяется, выполняется коррекция градиента, посредством которой целевое ускорение/замедление транспортного средства корректируется в соответствии с градиентом поверхности дороги. Нормально, транспортное средство ускоряется при заданном или более крутом нисходящем градиенте. Тем не менее, в транспортном средстве, в котором выполняется коррекция градиента, поскольку замедление дополнительно корректируется для нисходящего градиента, формируется большое замедление в транспортном средстве даже для нисходящего градиента, и водитель может иметь чувство дискомфорта.
Цель настоящего изобретения состоит в том, чтобы предоставлять технологию, которая уменьшает величину коррекции градиента, которая определяется в соответствии с абсолютной величиной градиента для нисходящего градиента, за счет этого сдерживая возникновение у водителя чувства дискомфорта.
Согласно одному варианту осуществления настоящего изобретения создан способ управления электромотором электрического транспортного средства, которое содержит электромотор, который обеспечивает тормозную силу или движущую силу для транспортного средства в соответствии с рабочей величиной нажатия педали акселератора, управляет тормозной силой, когда рабочая величина нажатия педали акселератора меньше заданного значения, и управляет движущей силой, когда рабочая величина нажатия педали акселератора составляет заданное значение или больше, при этом способ управления включает этапы, на которых: оценивают возмущающий крутящий момент, который действует на электромотор в качестве компонента сопротивления, связанного с градиентом; выполняют коррекцию, посредством которой тормозная сила или движущая сила увеличивается и уменьшается для того, чтобы подавлять компонент сопротивления в соответствии с оцененным значением возмущающего крутящего момента; уменьшают величину коррекции тормозной силы или движущей силы на дороге, идущей под спуск, при заданном или более крутом градиенте; и вычисляют верхнее предельное значение величины коррекции на основе значения крутящего момента, которое позволяет транспортному средству останавливаться, когда рабочая величина нажатия педали акселератора равна 0 при заданном градиенте.
Предпочтительно, когда задается верхнее предельное значение величины коррекции, заданный градиент задается равным максимальному значению градиента, при котором транспортное средство имеет возможность останавливаться посредством тормозного крутящего момента, который получается посредством суммирования величины коррекции с верхним предельным значением с тормозной силой, сформированной в транспортном средстве, когда рабочая величина нажатия педали акселератора равна 0.
Предпочтительно, на дороге, идущей под спуск, при заданном крутом градиенте, который является более крутым, чем заданный градиент, величина коррекции задается таким образом, что ускорение транспортного средства становится равным 0 или меньше вследствие тормозной силы, сформированной в транспортном средстве, когда рабочая величина нажатия педали акселератора равна 0.
Предпочтительно, крутой градиент задается равным градиенту, с которым ускорение транспортного средства становится равным 0 вследствие тормозной силы, сформированной в транспортном средстве, когда рабочая величина нажатия педали акселератора равна 0.
Согласно другому варианту осуществления настоящего изобретения создано устройство управления электромотором электрического транспортного средства, которое содержит электромотор, который обеспечивает тормозную силу или движущую силу для транспортного средства в соответствии с рабочей величиной нажатия педали акселератора, и контроллер, который управляет тормозной силой, когда рабочая величина нажатия педали акселератора меньше заданного значения, и управляет движущей силой, когда рабочая величина нажатия педали акселератора составляет заданное значение или больше, при этом контроллер: оценивает возмущающий крутящий момент, который действует на электромотор в качестве компонента сопротивления, связанного с градиентом; выполняет коррекцию, посредством которой тормозная сила или движущая сила увеличивается и уменьшается таким образом, чтобы подавлять компонент сопротивления в соответствии с оцененным значением возмущающего крутящего момента; уменьшает величину коррекции тормозной силы или движущей силы на дороге, идущей под спуск, при заданном или более крутом градиенте; и вычисляет верхнее предельное значение величины коррекции на основе значения крутящего момента, которое позволяет транспортному средству останавливаться, когда величина нажатия педали акселератора равна 0 при заданном градиенте.
Далее подробно описываются варианты осуществления настоящего изобретения с прилагаемыми чертежами.
Краткое описание чертежей
Фиг. 1 является блок-схемой основных компонентов электрического транспортного средства, содержащего устройство управления электрического транспортного средства согласно варианту осуществления;
Фиг. 2 является блок-схемой последовательности операций способа, показывающей последовательность операций обработки управления током электромотора, причем обработка выполняется посредством контроллера электромотора, предоставленного в устройстве управления электрического транспортного средства согласно варианту осуществления;
Фиг. 3 является видом примера таблицы позиций акселератора (степеней открытия акселератора) и крутящих моментов;
Фиг. 4 является видом, описывающим способ для вычисления значения первого целевого крутящего момента согласно варианту осуществления;
Фиг. 5 является видом, описывающим способ для вычисления оцененного значения возмущающего крутящего момента.
Фиг. 6 является видом моделирования системы передачи движущей силы в транспортном средстве;
Фиг. 7 является блок-схемой, реализующей обработку управления остановкой;
Фиг. 8 является видом, описывающим способ для вычисления крутящего F/B-момента Tω по частоте вращения электромотора на основе частоты вращения электромотора;
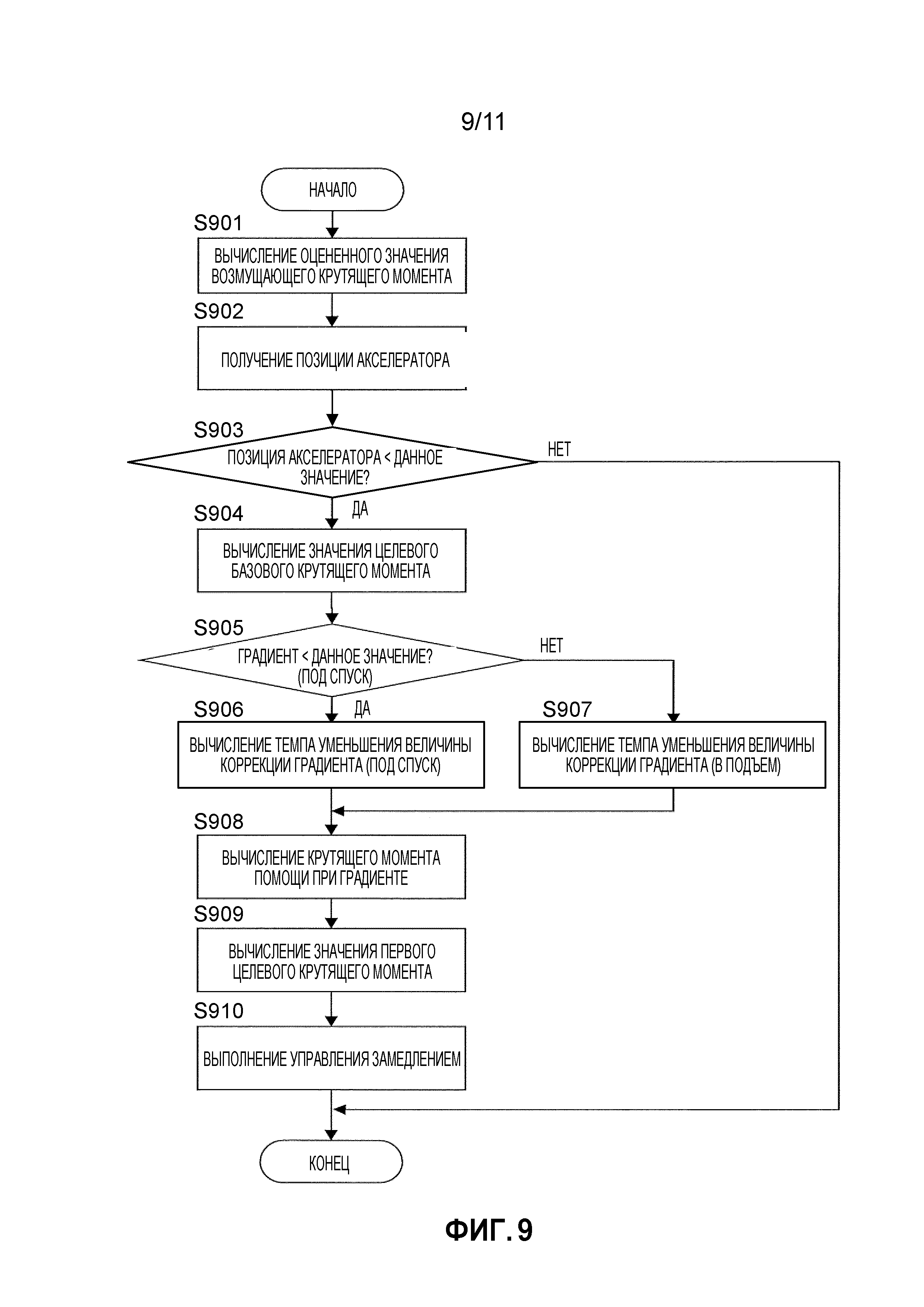
Фиг. 9 является блок-схемой последовательности операций способа, показывающей последовательность операций обработки управления замедлением;
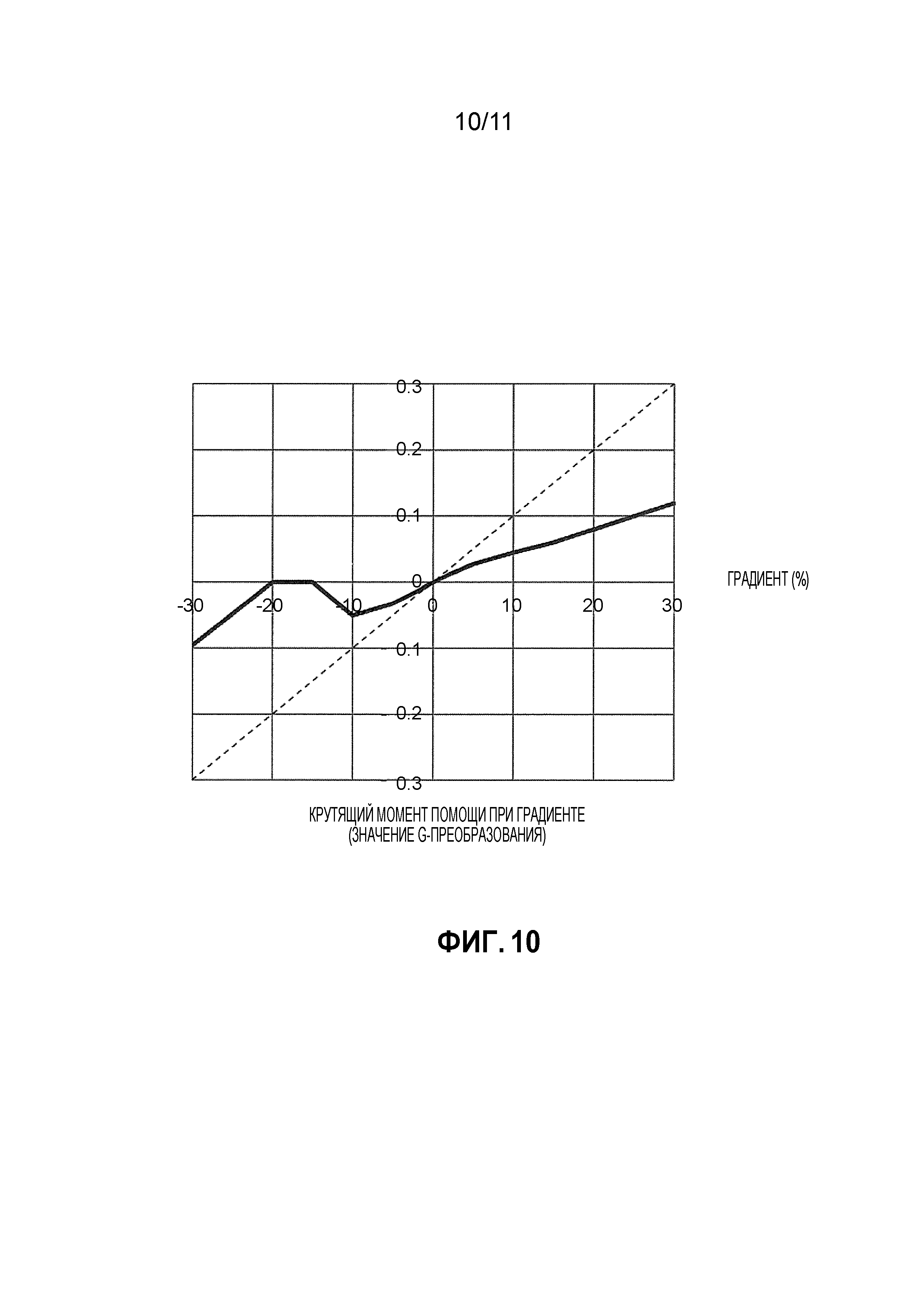
Фиг. 10 является видом, описывающим способ для вычисления темпа уменьшения величины коррекции градиента согласно варианту осуществления; и
Фиг. 11 является видом примера результата управления посредством устройства управления электрического транспортного средства согласно варианту осуществления.
Подробное описание вариантов осуществления изобретения
Далее в этом документе описывается пример, в котором устройство управления электрического транспортного средства согласно настоящему изобретению применяется к электрическому транспортному средству, имеющему электромотор (в дальнейшем в этом документе, также называемый просто "электромотором") в качестве источника приведения в движение.
Вариант осуществления
Фиг. 1 является блок-схемой основных компонентов электрического транспортного средства, которое включает в себя устройство управления электрического транспортного средства согласно варианту осуществления. Устройство управления электрического транспортного средства согласно настоящему изобретению содержит электромотор в качестве части или всего источника приведения в движение транспортного средства и является применимым к электрическому транспортному средству, которое имеет возможность двигаться с помощью движущей силы электромотора. Электрическое транспортное средство представляет собой не только электромобиль, но также может представлять собой гибридный автомобиль или автомобиль на топливных элементах. В частности, устройство управления электрического транспортного средства согласно варианту осуществления является применимым к транспортному средству, которое имеет возможность управлять ускорением, замедлением и остановкой транспортного средства только с помощью операции нажатия педали акселератора. В таком транспортном средстве, водитель нажимает педаль акселератора, чтобы ускорять транспортное средство, и водитель уменьшает величину нажатия педали акселератора, которая нажимается, или приводит величину нажатия педали акселератора к нулю, когда транспортное средство замедляется или останавливается. На дороге, идущей в подъем, транспортное средство может приближаться к остановленному состоянию при нажатии педали акселератора, чтобы предотвращать перемещение транспортного средства назад.
Сигналы, указывающие состояния транспортного средства, такие как скорость V транспортного средства, позиция θ акселератора, фаза α ротора электромотора 4 (электромотора трехфазного переменного тока) и трехфазные переменные токи iu, iv, iw электромотора 4, вводятся в контроллер 2 электромотора в качестве цифровых сигналов. Контроллер 2 электромотора формирует PWM-сигнал для управления электромотором 4 на основе входных сигналов. Дополнительно, контроллер 2 электромотора управляет переключающим элементом инвертора 3 таким образом, чтобы открывать и закрывать в соответствии со сформированным PWM-сигналом. Контроллер 2 электромотора также формирует значение команды управления величиной фрикционного торможения в соответствии с рабочей величиной нажатия педали акселератора или рабочей величиной нажатия педали 10 тормоза водителем.
Контроллер 2 электромотора также функционирует в качестве контроллера, который управляет тормозной силой, сформированной в транспортном средстве, когда рабочая величина нажатия педали акселератора (позиция акселератора (степень открытия акселератора)) меньше заданного значения, и управляет движущей силой, сформированной в транспортном средстве, когда рабочая величина нажатия педали акселератора составляет заданное значение или больше.
Инвертор 3 включает и выключает два переключающих элемента (например, силовые полупроводниковые элементы, такие как IGBT и MOSFET), предоставленные для каждой фазы, и в силу этого преобразует постоянный ток, предоставленный посредством аккумулятора 1, в переменный ток таким образом, что требуемый ток протекает в электромоторе 4.
Электромотор 4 формирует движущую силу посредством использования переменного тока, подаваемого из инвертора 3, и передает движущую силу на левое и правое ведущие колеса 9a, 9b через редукторную шестерню 5 и ведущий вал 8. Электромотор 4 также формирует рекуперативную движущую силу, когда электромотор 4 вращается вместе с ведущими колесами 9a, 9b, когда транспортное средство движется, и в силу этого восстанавливает кинетическую энергию транспортного средства в качестве электрической энергии. В этом случае, инвертор 3 преобразует переменный ток, сформированный во время работы в рекуперативном режиме электромотора 4, в постоянный ток и подает постоянный ток в аккумулятор 1.
Датчик 7 электрического тока определяет трехфазные переменные токи Iu, Iv, Iw, протекающие в электромоторе 4. Тем не менее, поскольку сумма трехфазных переменных токов Iu, Iv, Iw равна 0, токи в любых двух фазах могут определяться, и ток в оставшейся одной фазе может получаться посредством вычисления.
Датчик 6 вращения, например, представляет собой круговой датчик позиции или датчик позиции и определяет фазу α ротора электромотора 4.
Тормозной контроллер 11 выводит значение команды управления тормозным актуатором во фрикционный тормоз 13. С помощью значения команды управления тормозным актуатором, давление тормозной жидкости формируется в соответствии со значением команды управления величиной фрикционного торможения, сформированным в контроллере 2 электромотора.
Датчик 12 давления жидкости функционирует в качестве средства определения величины торможения, определяет давление тормозной жидкости фрикционного тормоза 13 и выводит определенное давление тормозной жидкости (величину фрикционного торможения) в тормозной контроллер 11 и контроллер 2 электромотора.
Фрикционный тормоз 13 обеспечивается в каждом из левого и правого ведущих колес 9a, 9b и формирует тормозную силу в транспортном средстве посредством прижатия тормозной колодки к тормозному ротору в соответствии с давлением тормозной жидкости.
Когда максимальный рекуперативный тормозной крутящий момент является недостаточным для намеченного тормозного крутящего момента водителя, вычисленного из рабочей величины нажатия педали акселератора, скорости транспортного средства и т.д., фрикционная тормозная сила, сформированная посредством фрикционного тормоза 13, функционирует в качестве тормозной силы, которая используется в соответствии со значением команды управления величиной фрикционного торможения, выводимым из контроллера 2 электромотора. Кроме того, даже когда намеченная тормозная сила водителя меньше максимального рекуперативного тормозного крутящего момента, фрикционная тормозная сила используется, когда тормозная сила, требуемая водителем, не может покрываться только посредством рекуперативного тормозного крутящего момента, поскольку рекуперативная электрическая мощность ограничена, когда аккумулятор 1 полностью заряжен, электромотор 4 защищен от тепла и т.д. Кроме того, фрикционная тормозная сила не только запрашивается в соответствии с рабочей величиной нажатия педали акселератора, но также и используется для достижения тормозной силы, требуемой посредством рабочей величины нажатия педали тормоза водителя.
Датчик 15 продольной составляющей G главным образом определяет продольное ускорение и выводит значение определения в контроллер 2 электромотора. Таким образом, контроллер 2 электромотора имеет возможность вычислять компонент возмущающего крутящего момента, который почти совпадает с сопротивлением вследствие градиента, которое действует на электромотор 4 на основе значения, определенного посредством датчика продольной составляющей G.
Фиг. 2 является блок-схемой последовательности операций способа, показывающей последовательность операций обработки управления током электромотора, которая программируется таким образом, что она выполняется посредством контроллера 2 электромотора.
На этапе S201, сигналы, указывающие состояния транспортного средства, вводятся в контроллер 2 электромотора. Здесь, вводятся скорость V транспортного средства (м/с), позиция θ акселератора (%), фаза α ротора (рад) электромотора 4, частота Nm вращения (об/мин) электромотора 4, трехфазные переменные токи iu, iv, iw, протекающие в электромоторе 4, значение Vdc постоянного напряжения (В) между аккумулятором 1 и инвертором 3, рабочая величина нажатия педали тормоза и давление тормозной жидкости.
Скорость V транспортного средства (км/ч) представляет собой скорость вращения колес для колес (ведущих колес 9a, 9b), которые передают движущую силу, когда транспортное средство приводится в движение. Скорость V транспортного средства получается посредством датчиков 11a, 11b скорости вращения колес или через связь из другого контроллера (не показан). Альтернативно, скорость V транспортного средства (км/ч) получается следующим образом. Механическая угловая скорость ωm ротора умножается на динамический радиус r шины и затем делится на передаточное отношение главной шестерни, и в силу этого получается скорость v транспортного средства (м/с). Затем скорость v транспортного средства (м/с) умножается на 3600/1000, чтобы преобразовывать единицы.
В качестве индикатора рабочей величины нажатия педали акселератора водителем, позиция θ акселератора (%) получается посредством датчика позиции акселератора (не показан) или через связь из другого контроллера, такого как контроллер транспортного средства (не показан).
Фаза α ротора (рад) электромотора 4 получается из датчика 6 вращения. Частота Nm вращения (об/мин) электромотора 4 получается следующим образом. Угловая скорость ω ротора (электрический угол) делится на число полюсных пар p электромотора 4 таким образом, что получается частота ωm вращения электромотора (рад/с), которая представляет собой механическую угловую скорость электромотора 4. После этого, полученная частота ωm вращения электромотора умножается на 60/(2π), в силу чего получается частота Nm вращения (об/мин). Угловая скорость ω ротора получается посредством дифференцирования фазы α ротора.
Трехфазные переменные токи iu, iv, iw (A), протекающие в электромоторе 4, получаются из датчика 7 электрического тока.
Значение Vdc постоянного напряжения (В) получается из датчика напряжения (не показан), предоставленного в линии источника мощности постоянного тока между аккумулятором 1 и инвертором 3, или из значения напряжения источника мощности, передаваемого из контроллера аккумулятора (не показан).
Величина торможения получается из значения датчика давления тормозной жидкости, определенного посредством датчика 12 давления жидкости. Значение, определенное посредством датчика хода (не показан) и т.п., который определяет величину нажатия педали тормоза посредством операции с педалью водителя (рабочую величину нажатия педали тормоза), может использоваться вместо этого в качестве величины торможения.
При обработке вычисления значений целевого крутящего момента на этапе S202, контроллер 2 электромотора задает значение Tm1* первого целевого крутящего момента. В частности, во-первых, со ссылкой на таблицу позиций акселератора и крутящих моментов, показанную на фиг. 3, который представляет аспект характеристики движущей силы, которая вычисляется в соответствии с позицией θ акселератора и частотой ωm вращения электромотора, вводимыми на этапе S201, значение Tm0* целевого базового крутящего момента (значение целевого крутящего момента) задается в качестве крутящего момента, запрашиваемого водителем. Затем, оцененное значение Td возмущающего крутящего момента, которое почти совпадает с сопротивлением вследствие градиента, получается. После этого оцененное значение Td возмущающего крутящего момента суммируется со значением Tm0* целевого базового крутящего момента в качестве крутящего момента помощи при градиенте, за счет этого задавая значение Tm1* первого целевого крутящего момента, в котором компонент сопротивления вследствие градиента подавляется.
Тем не менее, в варианте осуществления, когда водитель запрашивает замедление, выполняется обработка управления замедлением, при которой величина крутящего момента помощи при градиенте, которая должна суммироваться со значением Tm0* целевого базового крутящего момента, уменьшается в соответствии с градиентом поверхности дороги. Ниже описываются подробности обработки управления замедлением, которая представляет собой характеристическую обработку настоящего изобретения.
Как описано выше, устройство управления электрического транспортного средства согласно варианту осуществления является применимым к транспортному средству, которое имеет возможность управлять ускорением, замедлением и остановкой транспортного средства только посредством нажатия педали акселератора, и можно останавливать транспортное средство посредством полного закрытия педали акселератора, по меньшей мере, на поверхности дороги с заданным градиентом или меньше. Следовательно, в таблице позиций акселератора и крутящих моментов, показанной на фиг. 3, отрицательный крутящий момент электромотора задается таким образом, что рекуперативная тормозная сила работает, когда позиция акселератора составляет от 0 (полностью закрытая) до 1/8. Тем не менее, таблица позиций акселератора и крутящих моментов, показанная на фиг. 3, представляет собой только пример и не ограничена этим.
В варианте осуществления, максимальное значение величины помощи при градиенте, которое представляет собой верхнее предельное значение абсолютного значения крутящего момента помощи при градиенте, задается с учетом безопасности и т.д. Верхнее предельное значение в варианте осуществления задается равным значению, эквивалентному абсолютному значению тормозного крутящего момента, которое обеспечивает остановку транспортного средства, посредством суммирования с тормозной силой, сформированной в транспортном средстве, когда рабочая величина нажатия педали акселератора равна 0 на дороге, идущей под спуск с градиентом в -10%.
На этапе S203, контроллер 2 выполняет обработку управления остановкой. В частности, контроллер 2 определяет то, находится он или нет в момент времени непосредственно перед остановкой транспортного средства, и когда он не находится в момент времени непосредственно перед остановкой транспортного средства, значение Tm1* первого целевого крутящего момента, вычисленное на этапе S202, задается равным значению Tm* команды управления крутящим моментом электромотора. В момент времени непосредственно перед остановкой транспортного средства, значение Tm2* второго целевого крутящего момента задается равным значению Tm* команды управления крутящим моментом электромотора. Значение Tm2* второго целевого крутящего момента сходится к оцененному значению Td возмущающего крутящего момента по мере того, как частота вращения электромотора уменьшается. Значение Tm2* второго целевого крутящего момента представляет собой положительный крутящий момент на дороге, идущей в подъем, отрицательный крутящий момент на дороге, идущей под спуск, и почти нуль на ровной дороге.
Дополнительно, во время обработки управления остановкой, при которой значение Tm2* второго целевого крутящего момента задается равным значению Tm* команды управления крутящим моментом электромотора, обработка уменьшения крутящего момента при замедлении, описанная ниже, не выполняется. Это означает то, что во время обработки управления остановкой, поскольку значение Tm* команды управления крутящим моментом электромотора сходится к оцененному значению Td возмущающего крутящего момента, которое почти совпадает с сопротивлением вследствие градиента, транспортное средство останавливается плавно и остается остановленным только с помощью операции нажатия педали акселератора независимо от градиента поверхности дороги.
На следующем этапе S204, контроллер 2 выполняет обработку вычисления значений команд управления током. В частности, целевое значение id* тока d-оси и целевое значение iq* тока q-оси получаются на основе частоты ωm вращения электромотора и значения Vdc постоянного напряжения в дополнение к значению Tm* целевого крутящего момента (значению Tm* команды управления крутящим моментом электромотора), вычисленному на этапе S203. Например, подготавливается таблица, которая задает взаимосвязи между значением команды управления крутящим моментом, частотой вращения электромотора и значением постоянного напряжения и целевым значением тока d-оси и целевым значением тока q-оси, и целевое значение id* тока d-оси и целевое значение iq* тока q-оси получаются со ссылкой на таблицу.
На этапе S205, управление по току выполняется таким образом, что ток id d-оси и ток iq q-оси совпадают с целевым значением id* тока d-оси и целевым значением iq* тока q-оси, полученными на этапе S204, соответственно. Для этого, во-первых, ток id d-оси и ток iq q-оси получаются на основе трехфазных переменных токов iu, iv, iw и фазы α ротора электромотора 4, которые вводятся на этапе S201. Затем, из соответствующих отклонений между значениями id*, iq* команд управления током d-оси и q-оси и токами id, iq d-оси и q-оси, вычисляются значения vd, vq команд управления напряжением d-оси и q-оси. Напряжение помехозащищенности, которое необходимо для того, чтобы подавлять напряжение помех между d-q ортогональными координатами, может суммироваться с вычисленными значениями vd, vq команд управления напряжением d-оси и q-оси.
Затем значения vu, vv, vw команд управления трехфазным переменным напряжением получаются из значений vd, vq команд управления напряжением d-оси и q-оси и фазы α ротора электромотора 4. PWM-сигналы tu (%), tv (%) и tw (%) получаются из полученных значений vu, vv и vw команд управления трехфазным переменным напряжением и значения Vdc постоянного напряжения. По мере того, как переключающий элемент инвертора 3 открывается и закрывается посредством PWM-сигналов tu, tv, tw, полученных так, как описано выше, можно приводить в действие электромотор 4 с требуемым крутящим моментом, инструктированным посредством значения Tm* команды управления крутящим моментом электромотора.
В дальнейшем подробно описывается обработка, выполняемая на этапе S202 на фиг. 2, другими словами, способ для задания значения Tm1* первого целевого крутящего момента со ссылкой на фиг. 4.
Модуль 401 задания значений целевого базового крутящего момента обращается к таблице позиций акселератора и крутящих моментов, показанной на фиг. 3, и задает значение Tm0* целевого базового крутящего момента на основе позиции акселератора и частоты ωm вращения электромотора.
Модуль 402 оценки возмущающего крутящего момента получает оцененное значение Td возмущающего крутящего момента на основе значения Tm* команды управления крутящим моментом электромотора, частоты ωm вращения электромотора и величины B торможения.
Фиг. 5 является подробной блок-схемой модуля 402 оценки возмущающего крутящего момента. Модуль 402 оценки возмущающего крутящего момента включает в себя блок 501 управления, блок 502 управления, модуль 503 оценки тормозного крутящего момента, сумматор/вычитатель 504 и блок 505 управления.
Блок 501 управления выполняет функцию в качестве фильтра, имеющего передаточную характеристику H(s)/Gp(s), и выполняет обработку фильтрации частоты ωm вращения электромотора, которая вводится в блок 501 управления, за счет этого вычисляя оцененное значение первого крутящего момента электромотора. Gp(s) представляет собой передаточную характеристику из крутящего момента Tm электромотора через частоту ωm вращения электромотора, и подробная информация Gp(s) предоставлена ниже. H(s) представляет собой фильтр нижних частот, имеющий передаточную характеристику, в которой разность между степенью знаменателя и степенью числителя H(s) становится разностью между степенью знаменателя и степенью числителя передаточной характеристики GP(s) или больше.
Блок 502 управления выполняет функцию в качестве фильтра нижних частот, имеющего передаточную характеристику H(s), и выполняет обработку фильтрации значения Tm* команды управления крутящим моментом электромотора, которое вводится в блок 502 управления, за счет этого вычисляя оцененное значение второго крутящего момента электромотора.
Модуль 503 оценки тормозного крутящего момента вычисляет оцененное значение тормозного крутящего момента на основе величины B торможения и скорости V транспортного средства. В модуле 503 оценки тормозного крутящего момента оцененное значение тормозного крутящего момента вычисляется с учетом обработки умножения для выполнения преобразования из величины B торможения в крутящий момент вала электромотора, скорости отклика из значения датчика давления жидкости, определенного посредством датчика 12 давления жидкости до фактической тормозной силы, и т.д.
Поскольку тормозная от посредством фрикционного тормоза 13 действует в направлении замедления, когда транспортное средство перемещается вперед и назад, необходимо инвертировать знак оцененного значения тормозного крутящего момента в соответствии со знаком продольной скорости транспортного средства (скорости кузова транспортного средства, скорости вращения колес, частоты вращения электромотора, частоты вращения ведущего вала или другого параметра скорости/частоты вращения, пропорционального скорости транспортного средства). Следовательно, в соответствии со скоростью V транспортного средства, которая вводится, модуль 503 оценки тормозного крутящего момента задает знак оцененного значения тормозного крутящего момента как знак минус, когда транспортное средство движется вперед, и как знак плюс, когда транспортное средство движется назад.
Сумматор/вычитатель 504 вычитает оцененное значение первого крутящего момента электромотора из оцененного значения второго крутящего момента электромотора, а также суммирует значение коррекции тормозного крутящего момента. В сумматоре/вычитателе 504, поскольку значение коррекции тормозного крутящего момента, имеющее знак минус относительно направления перемещения транспортного средства, суммируется, можно вычислять на последующей стадии оцененное значение Td возмущающего крутящего момента, в котором подавляется тормозной крутящий момент, вызываемый посредством величины B торможения. Вычисленное значение выводится в блок 505 управления.
Блок 505 управления представляет собой фильтр, имеющий передаточную характеристику Hz(s), и выполняет обработку фильтрации вывода сумматора/вычитателя 504, за счет этого вычисляя оцененное значение Td возмущающего крутящего момента. Затем блок 505 управления выводит оцененное значение Td возмущающего крутящего момента в модуль 403 регулирования величины коррекции градиента, показанный на фиг. 4. Ниже описываются подробности Hz(s).
Снова ссылаясь на фиг. 4, описание продолжается. Традиционно, оцененное значение Td возмущающего крутящего момента, вычисленное в модуле 402 оценки возмущающего крутящего момента, вводится в сумматор 404 и суммируется со значением Tm0* целевого базового крутящего момента. Таким образом, коррекция градиента значения Tm0* целевого базового крутящего момента выполняется на основе оцененного значения Td возмущающего крутящего момента, и крутящий момент помощи при градиенте, соответствующий компоненту сопротивления вследствие градиента, суммируется. Таким образом, вычисляется значение Tm1* первого целевого крутящего момента, в котором подавляется компонент сопротивления вследствие градиента. Следовательно, даже когда, например, транспортное средство движется по поверхности дороги с различными градиентами при постоянной позиции акселератора, можно поддерживать равномерную скорость без влияния компонента сопротивления вследствие градиента.
Тем не менее, когда абсолютно отсутствует влияние компонента сопротивления вследствие градиента на ускорение и замедление вследствие такой коррекции градиента, водитель может иметь чувство дискомфорта, поскольку водитель не ощущает влияния на ускорение и замедление, которое ожидается от градиента. Например, в то время, когда транспортное средство движется по дороге, идущей под спуск (нисходящий градиент), когда градиент внезапно становится более крутым, и замедление корректируется таким образом, что оно увеличивается, еще большее замедление формируется в транспортном средстве, даже если нисходящий градиент является более крутым. В такой период, водитель, движущийся по дороге, идущей под спуск, инстинктивно ожидает, что транспортное средство ускоряется по мере того, как градиент становится более крутым. Следовательно, большое замедление, сформированное в противовес такому ожиданию, вызывает у водителя чувство дискомфорта.
В варианте осуществления, с учетом ощущения при вождении, обработка уменьшения крутящего момента при замедлении выполняется для того, чтобы сдерживать этот вид чувства дискомфорта в то время, когда водитель выполняет запрос на замедление. Обработка уменьшения крутящего момента при замедлении уменьшает абсолютную величину крутящего момента помощи при градиенте (величину помощи при градиенте) в соответствии с градиентом поверхности дороги, по которой движется транспортное средство. В дальнейшем в этом документе, описывается конфигурация для выполнения обработки уменьшения крутящего момента при замедлении.
Модуль 403 регулирования величины коррекции градиента, показанный на фиг. 4, представляет собой конфигурацию для выполнения обработки уменьшения крутящего момента при замедлении. Оцененное значение Td возмущающего крутящего момента, оцененное в модуле 402 оценки возмущающего крутящего момента, и позиция акселератора вводятся в модуль 403 регулирования величины коррекции градиента, и модуль 403 регулирования величины коррекции градиента вычисляет крутящий момент помощи при градиенте после обработки уменьшения крутящего момента при замедлении. Более конкретно, с учетом ощущения при вождении, модуль 403 регулирования величины коррекции градиента вычисляет оптимизированный в соответствии с ощущениями темп уменьшения величины коррекции градиента из градиента поверхности дороги, который может определяться из оцененного значения Td возмущающего крутящего момента, и запроса на ускорение/замедление водителя, который может обнаруживаться из позиции акселератора. Затем крутящий момент помощи при градиенте вычисляется посредством умножения оцененного значения Td возмущающего крутящего момента, которое вводится в модуль 403 регулирования величины коррекции градиента, на вычисленный темп уменьшения величины коррекции градиента. Как результат, вычисляется крутящий момент помощи при градиенте, который регулируется до величины помощи при градиенте, которая не вызывает у водителя чувство дискомфорта. Ниже подробно описывается способ для задания темпа уменьшения величины коррекции градиента относительно вычисления крутящего момента помощи при градиенте.
В сумматоре 404, значение Tm1* первого целевого крутящего момента перед обработкой задания ограничений вычисляется посредством суммирования значения Tm0* значения Tm0* целевого базового крутящего момента, служащего в качестве запрашиваемого водителем крутящего момента, вычисленного в модуле 401 задания значений целевого базового крутящего момента, с крутящим моментом помощи при градиенте, вычисленным в модуле 403 регулирования величины коррекции градиента. Значение Tm1* первого целевого крутящего момента перед обработкой задания ограничений вводится в ограничитель 405 скорости.
Ограничитель 405 скорости задает верхний предел темпа изменения значения Tm1* первого целевого крутящего момента. Таким образом, можно предотвращать резкое изменение значения целевого крутящего момента. Верхний предел темпа изменения может изменяться в соответствии со скоростью транспортного средства. Дополнительно, вывод ограничителя 405 скорости вводится в фильтр 406 нижних частот, чтобы удалять высокочастотный шум и т.д.
Фильтр 406 нижних частот представляет собой фильтр нижних частот, сконфигурированный таким образом, чтобы удалять компонент высокочастотного шума, и вычисляет значение Tm1* первого целевого крутящего момента в качестве значения команды управления тормозного/движущего крутящего момента посредством выполнения обработки фильтрации для вывода ограничителя 405 скорости.
С помощью значения Tm1* первого целевого крутящего момента, вычисленного так, как указано выше, можно уменьшать рабочую величину нажатия педали акселератора водителя (величину хода) без вызывания чувства дискомфорта, и можно улучшать ощущение при вождении, в частности, когда транспортное средство движется по дороге с градиентом.
Перед описанием обработки управления замедлением, здесь описывается передаточная характеристика GP(s) из крутящего момента Tm электромотора в частоту ωm вращения электромотора в устройстве управления электрического транспортного средства согласно варианту осуществления. Передаточная характеристика GP(s) используется в качестве модели транспортного средства, в которой моделируется система передачи движущей силы транспортного средства, когда оцененное значение возмущающего крутящего момента вычисляется.
Фиг. 6 является видом моделирования системы передачи движущей силы в транспортном средстве, и параметры на чертеже являются следующими:
Jm - инерция электромотора
Jw - инерция ведущего колеса
M - вес транспортного средства
Kd - крутильная жесткость приводной системы
Kt - коэффициент относительно трения между шиной и поверхностью дороги
N - полное передаточное отношение
r - радиус нагрузки шины
ωm - частота вращения электромотора
Tm - значение Tm* целевого крутящего момента
Td - крутящий момент ведущего колеса
F - сила, прикладываемая к транспортному средству
V - скорость транспортного средства
ωw - угловая скорость ведущего колеса
Затем следующие уравнения движения извлекаются из фиг. 6.
Уравнение 1

Уравнение 2

Уравнение 3

Уравнение 4

Уравнение 5

Звездочка (*), приведенная в верхнем правом углу каждого знака в уравнениях 1-3, выражает временной дифференциал.
Когда передаточная характеристика GP(s) из крутящего момента Tm электромотора в частоту ωm вращения электромотора для электромотора 4 получается на основе уравнений движения, приведенных в уравнениях 1-5, передаточная характеристика GP(s) выражается посредством следующего уравнения 6.
Уравнение 6

Параметры в уравнении 6 выражаются в нижеприведенном уравнении 7.
Уравнение 7
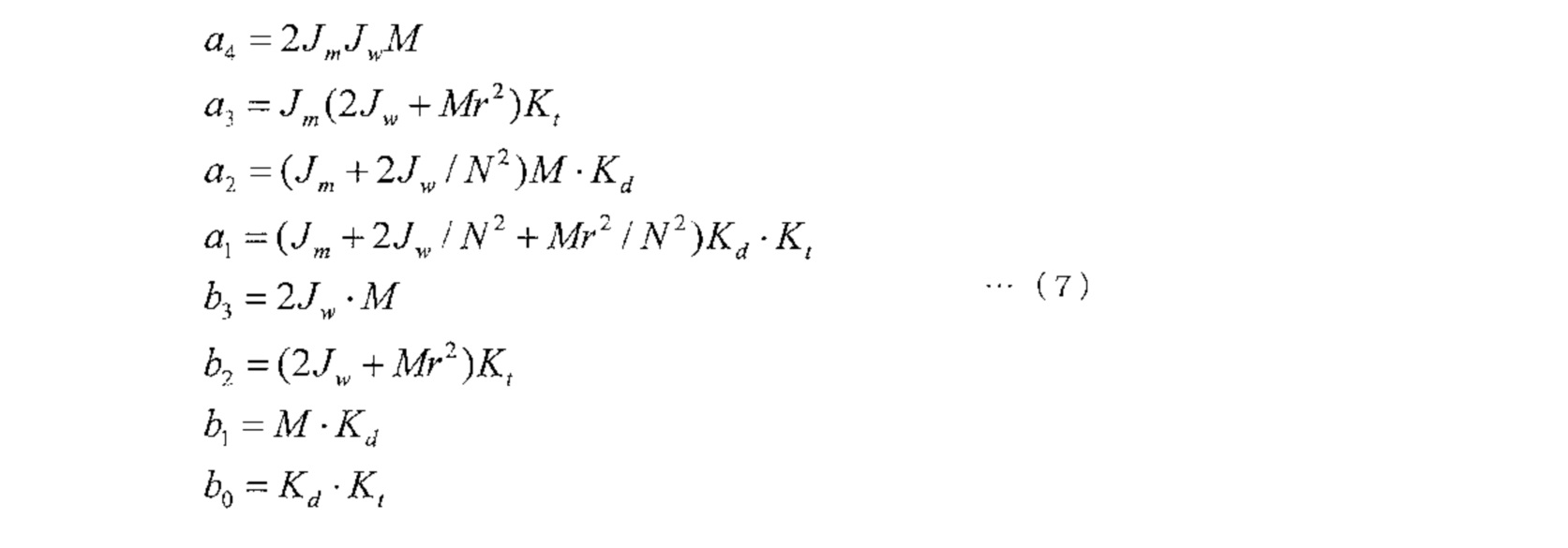
Посредством анализа полюсов и нулей передаточной функции, показанной в уравнении 6, уравнение 6 имеет возможность аппроксимировать передаточную функцию, приведенную в следующем уравнении 8, и один полюс и один нуль показывают значения, которые находятся чрезвычайно близко друг к другу. Это является эквивалентным тому, что α и β в следующем уравнении 8 являются значениями, которые находятся чрезвычайно близко друг к другу.
Уравнение 8

Следовательно, по мере того, как подавление нулей и полюсов в уравнении 8 (аппроксимация для α=β) выполняется, Gp(s) составляет передаточную характеристику (вторичного)/(третьего порядка), как показано в следующем уравнении 9.
Уравнение 9

Далее, со ссылкой на фиг. 7 и фиг. 8, описываются подробности обработки управления остановкой, выполняемой на этапе S203.
Фиг. 7 является блок-схемой для реализации обработки управления остановкой. Обработка управления остановкой выполняется посредством использования модуля 701 задания крутящего F/B-момента по частоте вращения электромотора, сумматора 702 и модуля 703 сравнения крутящих моментов. В дальнейшем в этом документе, описываются подробности каждого из компонентов.
Модуль 701 задания крутящего F/B-момента по частоте вращения электромотора вычисляет крутящий момент Tω обратной связи по частоте вращения электромотора (в дальнейшем в этом документе, называемый "крутящим F/B-моментом по частоте вращения электромотора)" на основе определенной частоты ωm вращения электромотора. Подробности предоставляются со ссылкой на фиг. 8.
Фиг. 8 является схемой для описания способа для вычисления крутящего F/B-момента Tω по частоте вращения электромотора на основе частоты ωm вращения электромотора. Модуль 701 задания крутящего F/B-момента по частоте вращения электромотора включает в себя умножитель 801 и умножает частоту ωm вращения электромотора на усиление Kvref, за счет этого вычисляя крутящий F/B-момент Tω по частоте вращения электромотора. Kvref является отрицательным значением (со знаком "минус"), которое необходимо для того, чтобы останавливать электрическое транспортное средство непосредственно перед остановкой электрического транспортного средства, и задается соответствующий на основе экспериментальных заданных и т.д. Крутящий F/B-момент Tω по частоте вращения электромотора задается в качестве крутящего момента, который реализует большую тормозную силу по мере того, как частота ωm вращения электромотора становится более высокой.
Хотя описывается модуль 701 задания крутящего F/B-момента по частоте вращения электромотора, который вычисляет крутящий F/B-момент Tω по частоте вращения электромотора посредством умножения частоты ωm вращения электромотора на усиление Kvref, модуль 701 задания крутящего F/B-момента по частоте вращения электромотора может вычислять крутящий F/B-момент Tω по частоте вращения электромотора посредством использования, например, таблицы рекуперативных крутящих моментов, в которой рекуперативный крутящий момент задается относительно частоты ωm вращения электромотора, или таблицы темпов спада, в которой темп спада частоты ωm вращения электромотора сохраняется заранее.
Описание продолжается снова со ссылкой на фиг. 7. Сумматор 702 суммирует крутящий F/B-момент Tω по частоте вращения электромотора, вычисленный в модуле 701 задания крутящего F/B-момента по частоте вращения электромотора, с крутящим моментом помощи при градиенте, вычисленным в вышеприведенном модуле 403 регулирования величины коррекции градиента посредством умножения оцененного значения Td возмущающего крутящего момента на темп уменьшения величины коррекции градиента. Таким образом, вычисляется значение Tm2* второго целевого крутящего момента.
Здесь, относительно оцененного значения Td возмущающего крутящего момента, приводятся подробности блока 505 управления, показанного на фиг. 5. Блок 505 управления представляет собой фильтр, имеющий передаточную характеристику Hz(s), и выполняет обработку фильтрации вывода сумматора/вычитателя 504, который вводится в блок 505 управления, за счет этого вычисляя оцененное значение Td возмущающего крутящего момента.
Передаточная характеристика Hz(s) описывается. Посредством перезаписи уравнения 9, получается следующее уравнение 10. Тем не менее, ζz, ωz, ζp, ωp в уравнении 10 выражаются посредством уравнений 11.
Уравнение 10

Уравнение 11

Согласно вышеприведенному, Hz(s) выражается посредством следующего уравнения (12) при условии, что ζc>ζz. Например, ζc>1, чтобы повышать эффект подавления вибрации в окружении при замедлении, сопровождаемый посредством бокового зазора в шестернях.
Уравнение 12

Как описано выше, оцененное значение Td возмущающего крутящего момента согласно варианту осуществления оценивается посредством модуля наблюдения возмущений, как показано на фиг. 5. Тем не менее, оцененное значение Td возмущающего крутящего момента может корректироваться для более высокой точности на основе значения определения датчика 15 продольной составляющей G. Кроме того, значение преобразования крутящего момента компонента сопротивления вследствие градиента, вычисленное на основе значения определения датчика 15 продольной составляющей G, может использоваться в качестве оцененного значения Td возмущающего крутящего момента.
Хотя сопротивление воздуха, ошибка моделирования, вызываемая посредством варьирования массы транспортного средства вследствие числа пассажиров и веса нагрузки, сопротивление крену шины, сопротивление вследствие градиента поверхности дороги и т.д. рассматриваются в качестве возмущений, сопротивление вследствие градиента представляет собой доминирующий фактор возмущений, в частности, непосредственно перед остановкой транспортного средства. Хотя факторы возмущений изменяются в зависимости от условий вождения, вышеприведенные факторы возмущений оцениваются совместно, поскольку модуль 402 оценки возмущающего крутящего момента вычисляет оцененное значение Td возмущающего крутящего момента на основе значения Tm* команды управления крутящим моментом электромотора, частоты ωm вращения электромотора и передаточной характеристики GP(s). Таким образом, транспортное средство имеет возможность плавно останавливаться, после чего выполняется замедление при любом состоянии движения.
Снова ссылаясь на фиг. 7, описание продолжается. Сумматор 702 вычисляет значение Tm2* второго целевого крутящего момента посредством суммирования крутящего F/B-момента Tω по частоте вращения электромотора, вычисленного посредством модуля 701 задания крутящего F/B-момента по частоте вращения электромотора, с крутящим моментом помощи при градиенте.
Модуль 703 сравнения крутящих моментов сравнивает абсолютные величины значения Tm1* первого целевого крутящего момента и значения Tm2* второго целевого крутящего момента и задает большее значение целевого крутящего момента в качестве значения Tm* команды управления крутящим моментом электромотора. В то время, когда транспортное средство движется, значение Tm2* второго целевого крутящего момента меньше значения Tm1* первого целевого крутящего момента. Когда транспортное средство замедляется и непосредственно перед остановкой транспортного средства (при заданной скорости транспортного средства или медленнее, либо когда параметр скорости/частоты вращения, пропорциональный скорости транспортного средства, становится заданным значением или меньше), значение Tm2* второго целевого крутящего момента превышает значение Tm1* первого целевого крутящего момента. Следовательно, когда значение Tm1* первого целевого крутящего момента превышает значение Tm2* второго целевого крутящего момента, модуль 703 сравнения крутящих моментов определяет то, что момент времени по-прежнему не находится в момент времени непосредственно перед остановкой транспортного средства, и задает значение Tm1* первого целевого крутящего момента равным значению Tm* команды управления крутящим моментом электромотора.
Дополнительно, когда значение Tm2* второго целевого крутящего момента становится больше значения Tm1* первого целевого крутящего момента, модуль 703 сравнения крутящих моментов определяет то, что момент времени находится в момент времени непосредственно перед остановкой транспортного средства, и переключает значение Tm* команды управления крутящим моментом электромотора со значения Tm1* первого целевого крутящего момента на значение Tm2* второго целевого крутящего момента. В этот момент, крутящий момент помощи при градиенте задается равным значению, которое совпадает с оцененным значением Td возмущающего крутящего момента. Следовательно, в то время как значение Tm2* второго целевого крутящего момента задается равным значению Tm* команды управления крутящим моментом электромотора, нижеописанная обработка управления замедлением не выполняется, или темп уменьшения величины коррекции градиента задается равным 0%. Для того, чтобы поддерживать состояние остановки транспортного средства, значение Tm2* второго целевого крутящего момента представляет собой положительный крутящий момент на дороге, идущей в подъем, и отрицательный крутящий момент на дороге, идущей под спуск, и сходится почти до нуля на ровной дороге.
Выше описываются подробности передаточной характеристики GP(s) и обработки управления остановкой. Далее приводится описание относительно вычисления темпа уменьшения величины коррекции градиента, выполняемого посредством модуля 403 регулирования величины коррекции градиента, показанного на фиг. 4, и вычисления крутящего момента помощи при градиенте на основе темпа уменьшения величины коррекции градиента.
Обработка управления замедлением
Фиг. 9 является блок-схемой последовательности операций способа, показывающей последовательность операций обработки уменьшения крутящего момента при замедлении согласно варианту осуществления. Последовательность операций программируется таким образом, что она многократно выполняется посредством контроллера 2 электромотора в фиксированном цикле.
На этапе S901, контроллер 2 электромотора вычисляет оцененное значение Td возмущающего крутящего момента. Оцененное значение Td возмущающего крутящего момента вычисляется посредством использования модуля наблюдения возмущений, описанного со ссылкой на фиг. 5.
Затем, на этапе S902, контроллер 2 электромотора получает позицию акселератора, чтобы обнаруживать ускорение или замедление, запрашиваемое водителем. Как описано со ссылкой на фиг. 3, заданная позиция акселератора или больше служит в качестве запроса на ускорение, и положительный крутящий момент электромотора (движущий крутящий момент) задается. Между тем, позиция акселератора, меньшая заданной позиции акселератора, служит в качестве запроса на замедление, и отрицательный крутящий момент электромотора (тормозной крутящий момент) задается таким образом, что рекуперативная тормозная сила прикладывается. Например, согласно таблице позиций акселератора и крутящих моментов, показанной на фиг. 3 в качестве примера, когда позиция акселератора составляет 1/8 или меньше, отрицательный крутящий момент электромотора задается, а когда позиция акселератора составляет 2/8, или больше, положительный крутящий момент электромотора задается. После того, как позиция акселератора получается, контроллер 2 электромотора выполняет обработку следующего этапа S903.
На этапе S903, контроллер 2 электромотора определяет то, запрашивает или нет водитель замедление, на основе полученной позиции акселератора. Когда позиция акселератора меньше заданного значения, другими словами, когда позиция акселератора меньше нижнего предельного значения позиции акселератора, посредством которого задается движущий крутящий момент, определяется то, что водитель запрашивает замедление. Когда определяется то, что водитель запрашивает замедление, контроллер 2 электромотора выполняет обработку следующего этапа S904, чтобы вычислять тормозной крутящий момент, запрашиваемый водителем, в качестве значения Tm0* целевого базового крутящего момента.
Когда полученная позиция акселератора составляет заданное значение или больше, другими словами, когда позиция акселератора находится в пределах диапазона, в котором задается движущий крутящий момент, в таком случае определяется то, что водитель запрашивает ускорение, и в силу этого обработка управления замедлением согласно этой последовательности операций завершается.
На этапе S904, контроллер 2 электромотора обращается к таблице позиций акселератора и крутящих моментов, показанной на фиг. 3 в качестве примера, и вычисляет значение Tm0* целевого базового крутящего момента в качестве запрашиваемого водителем крутящего момента на основе позиции θ акселератора и частоты ωm вращения электромотора. После того, как вычисляется значение Tm0* целевого базового крутящего момента, обработка следующего этапа S905 выполняется для того, чтобы определять то, представляет собой поверхность дороги, по которой движется транспортное средство, или нет дорогу, идущую под спуск.
На этапе S905, контроллер 2 электромотора определяет то, меньше или нет градиент (%) поверхности дороги заданного значения. Поскольку следует определять то, представляет собой поверхность дороги или нет дорогу, идущую под спуск, заданное значение задается равным 0%. Как описано выше, градиент поверхности дороги может получаться из оцененного значения Td возмущающего крутящего момента. Кроме того, оцененное значение Td возмущающего крутящего момента представляет собой положительный крутящий момент на дороге, идущей в подъем, отрицательный крутящий момент на дороге, идущей под спуск, и почти нуль на ровной дороге. Следовательно, на этом этапе, когда оцененное значение Td возмущающего крутящего момента меньше 0, определяется то, что поверхность дороги представляет собой дорогу, идущую под спуск, и обработка следующего этапа S906 выполняется. Когда оцененное значение Td возмущающего крутящего момента равно 0 или больше, определяется то, что поверхность дороги не представляет собой дорогу, идущую под спуск, и обработка этапа S907 выполняется.
На этапе S906, контроллер 2 электромотора вычисляет темп уменьшения величины коррекции градиента в то время, когда транспортное средство движется по дороге, идущей под спуск. В дальнейшем подробно описывается способ для вычисления темпа уменьшения величины коррекции градиента, вычисленной на этом этапе, со ссылкой на фиг. 10.
Фиг. 10 является видом для описания способа для вычисления темпа уменьшения величины коррекции градиента. Горизонтальная ось представляет градиент (%), и вертикальная ось представляет значение G-преобразования крутящего момента помощи при градиенте. Градиент (%) с положительным значением представляет дорогу, идущую в подъем, и градиент (%) с отрицательным значением представляет дорогу, идущую под спуск. Кроме того, чем больше абсолютное значение градиента (%), тем более крутым является градиент.
Пунктирная линия, показанная на фиг. 10, представляет крутящий момент помощи при градиенте, который почти совпадает с сопротивлением вследствие градиента поверхности дороги, и указывает оцененное значение Td возмущающего крутящего момента до того, как выполняется обработка уменьшения крутящего момента при замедлении. Это означает то, что пунктирная линия показывает крутящий момент помощи при градиенте, когда 100% помощи по градиенту выполняется, другими словами, темп уменьшения величины коррекции градиента равен 0%. Сплошная линия показывает крутящий момент помощи при градиенте согласно варианту осуществления. Крутящий момент помощи при градиенте вычисляется посредством умножения оцененного значения Td возмущающего крутящего момента на темп уменьшения величины коррекции градиента, вычисленный на этом этапе. Сплошная линия, показанная в отрицательных градиентах (%) на горизонтальной оси на фиг. 10 (левая половина на чертеже), представляет крутящий момент помощи при градиенте на дороге, идущей под спуск.
Как показано на чертеже, в варианте осуществления, на дороге с относительно умеренным градиентом приблизительно в -10(%), темп уменьшения величины коррекции градиента задается равным приблизительно 50%, и величина помощи при градиенте разделена почти на два. Таким образом, в то время как водитель имеет возможность ощущать, что транспортное средство движется по дороге, идущей под спуск, рабочая величина нажатия педали акселератора водителем для формирования тормозной силы может уменьшаться.
Затем, темп уменьшения величины коррекции градиента на дороге, идущей под спуск при градиенте от -10(%) до -20(%), вычисляется таким образом, что он увеличивается с 50% до 100%. Как описано выше, верхнее предельное значение крутящего момента помощи при градиенте согласно варианту осуществления представляет собой значение крутящего момента, которое обеспечивает возможность транспортному средству останавливаться, когда позиция акселератора является полностью закрытой, на дороге с градиентом -10(%). Это означает то, что транспортное средство, к которому применяется устройство управления электрического транспортного средства согласно варианту осуществления, может быть остановлено только посредством операции нажатия педали акселератора водителя, до тех пор, пока градиент дороги не достигает-10(%).
С другой стороны, на дороге, идущей под спуск, более крутой, чем градиент в -10(%), транспортное средство не может быть остановлено только с помощью операции нажатия педали акселератора, даже когда темп уменьшения величины коррекции градиента равен 0,%, и в силу этого требуется операция нажатия педали тормоза. Следовательно, в варианте осуществления, на дороге, идущей под спуск, которая является более крутой, чем градиент в -10(%), который представляет собой нижний предельный градиент (%), при котором операция нажатия педали тормоза требуется для того, чтобы останавливать транспортное средство, сдерживание чувства дискомфорта, ощущаемого водителем, приоритезируется, и темп уменьшения величины коррекции градиента увеличивается, чтобы уменьшать величину коррекции градиента.
В частности, темп уменьшения величины коррекции градиента согласно варианту осуществления вычисляется таким образом, что темп уменьшения величины коррекции градиента увеличивается линейно с 50% до 100%, когда градиент изменяется с -10(%) до -15(%) и что темп уменьшения поддерживается в 100%, до тех пор, пока градиент не достигает -20(%). Тем не менее, в варианте осуществления, необходимо только то, что темп уменьшения величины коррекции градиента увеличивается, когда градиент изменяется с -10(%) до градиента в -20(%), и что то, темп уменьшения величины коррекции градиента становится приблизительно 100%, когда градиент составляет -20(%), и изменения темпа уменьшения величины коррекции градиента не ограничены конкретным образом при условии, что изменения являются непрерывными. Дополнительно, когда градиент составляет -10(%), темп уменьшения величины коррекции градиента не ограничен и не должен обязательно составлять 50%.
Причина, по которой градиент в -10(%) описывается как градиент, который служит в качестве точки, в которой темп уменьшения величины коррекции градиента начинает увеличиваться, заключается в том, что верхнее предельное значение крутящего момента помощи при градиенте задается в качестве значения крутящего момента, которое обеспечивает возможность транспортному средству останавливаться, когда позиция акселератора является полностью закрытой, на дороге с градиентом -10(%). Это означает то, что заданный градиент, который служит в качестве точки, в которой темп уменьшения величины коррекции градиента начинает увеличиваться, задается равным максимальному значению градиента, при котором транспортное средство может быть остановлено посредством тормозного крутящего момента, который получается посредством суммирования ранее заданного верхнего предельного значения крутящего момента помощи при градиенте с тормозной силой, сформированной в транспортном средстве, когда рабочая величина нажатия педали акселератора равна 0. Следовательно, когда значение, заданное в качестве верхнего предела крутящего момента помощи при градиенте, изменяется, заданный градиент (%) также изменяется соответствующим образом.
Затем при крутом градиенте, более крутом, чем -20(%), темп уменьшения величины коррекции градиента уменьшается. В варианте осуществления, темп уменьшения величины коррекции градиента, который составляет 100% при градиенте в -20(%), уменьшается линейно и задается в качестве темпа уменьшения приблизительно в 30% при градиенте в -30(%).
Здесь, описывается причина, по которой темп уменьшения величины коррекции градиента задается равным 100% при градиенте в -20(%). В таблице позиций акселератора и крутящих моментов, показанной на фиг. 3, когда позиция акселератора равна 0 (полностью закрытая), формируется тормозная сила приблизительно в 0,2G. Затем, сопротивление вследствие градиента при градиенте в -20(%) составляет приблизительно 0,2G в качестве значения G-преобразования в направлении перемещения. Это означает то, что согласно таблице позиций акселератора и крутящих моментов, показанной на фиг. 3, когда темп уменьшения величины коррекции градиента задается равным 100% при градиенте в -20(%), можно сопоставлять тормозную силу, сформированную в транспортном средстве, когда позиция акселератора равна 0 (полностью закрытая) при градиенте в -20(%), и сопротивление вследствие градиента, действующее на транспортное средство. Дополнительно, поскольку человек инстинктивно ощущает, что дорога, идущая под спуск при градиенте в -20(%), является очень крутой, практически ни один обычный водитель не должен запрашивать ускорение посредством нажатия педали акселератора, и в большинстве случаев, обычный водитель должен запрашивать замедление посредством полного закрытия позиции акселератора.
Следовательно, с градиентом вплоть до -20(%), транспортное средство не должно ускоряться при полностью закрытой позиции акселератора, даже когда темп уменьшения величины коррекции градиента составляет приблизительно 100%. Следовательно, можно исключать окружение, в котором транспортное средство ускоряется в противовес запросу на замедление водителя посредством операции нажатия педали акселератора.
Между тем, на дороге, идущей под спуск при градиенте, более крутом, чем -20(%), сопротивление вследствие градиента превышает тормозную силу, сформированную, когда позиция акселератора является полностью закрытой. Следовательно, транспортное средство ускоряется, даже когда позиция акселератора является полностью закрытой. Следовательно, темп уменьшения величины коррекции градиента уменьшается таким образом, что ускорение становится равным 0 или меньше, когда позиция акселератора является полностью закрытой, за счет этого увеличивая величину помощи при градиенте. Таким образом, в то время, когда транспортное средство движется по дороге с относительно крутым спуском, у водителя не вызывается ощущение беспокойства по мере того, как транспортное средство ускоряется, даже если рабочая величина нажатия педали акселератора равна 0. Следовательно, на дороге, идущей под спуск при крутом градиенте, можно обеспечивать ощущение при вождении с чувством защищенности, и когда водитель намеревается останавливать транспортное средство, водитель стимулируется на то, чтобы выполнять операцию нажатия педали тормоза.
Выше описывается способ для вычисления темпа уменьшения величины коррекции градиента на дороге, идущей под спуск. Тем не менее, конкретные вышеизложенные числа являются значениями, вычисленными на основе таблицы позиций акселератора и крутящих моментов, показанной на фиг. 3 в качестве примера, и числа изменяются по мере необходимости в соответствии с изменениями значений таблицы позиций акселератора и крутящих моментов. Дополнительно, темп уменьшения величины коррекции градиента может вычисляться надлежащим образом в соответствии с таблицей позиций акселератора и крутящих моментов и градиентом поверхности дороги (%) либо может вычисляться из градиента поверхности дороги (%) со ссылкой на таблицу, которая сохраняется заранее, при этом взаимосвязь между темпом уменьшения величины коррекции градиента и градиентом поверхности дороги (%) получается в соответствии с таблицей позиций акселератора и крутящих моментов.
Снова ссылаясь на фиг. 9, описание продолжается.
На этапе S905, когда оцененное значение Td возмущающего крутящего момента равно 0 или больше, определяется то, что поверхность дороги не представляет собой дорогу, идущую под спуск. Следовательно, обработка этапа S907 выполняется для того, чтобы вычислять темп уменьшения величины коррекции градиента на дороге, идущей в подъем.
На этапе S907, контроллер 2 электромотора вычисляет темп уменьшения величины коррекции градиента на дороге, идущей в подъем. В варианте осуществления, сплошная линия, показанная при положительном градиенте (%) на горизонтальной оси на фиг. 10, представляет темп уменьшения величины коррекции градиента на дороге, идущей в подъем. Как показано на чертеже, темп уменьшения величины коррекции градиента на дороге, идущей в подъем, согласно варианту осуществления задается равным приблизительно 50%. При этом задании, величина помощи при градиенте разделена почти на два на дороге, идущей в подъем, и в силу этого можно уменьшать рабочую величину нажатия педали акселератора для формирования тормозной силы, заставляя водителя ощущать то, что транспортное средство движется по дороге, идущей в подъем.
На этапе S908, крутящий момент помощи при градиенте вычисляется посредством умножения оцененного значения Td возмущающего крутящего момента на вышеприведенный темп уменьшения величины коррекции градиента. После того, как вычисляется крутящий момент помощи при градиенте, контроллер 2 электромотора выполняет обработку следующего этапа S909.
На этапе S909, контроллер 2 электромотора вычисляет значение Tm1* первого целевого крутящего момента. Более конкретно, как показано на фиг. 4, значение Tm1* первого целевого крутящего момента вычисляется посредством суммирования значения Tm0* целевого базового крутящего момента в качестве запрашиваемого водителем крутящего момента и крутящего момента помощи при градиенте, вычисленного на этапе S908. Затем в течение времени приведения в движение в нормальном режиме, когда момент времени не находится в момент времени непосредственно перед остановкой транспортного средства, значение Tm1* первого целевого крутящего момента задается равным значению Tm* команды управления крутящим моментом электромотора (см. фиг. 7).
Затем на этапе 910, контроллер 2 электромотора выполняет управление торможением транспортного средства на основе запроса на замедление водителя посредством управления электромотором 4 со значением Tm1* первого целевого крутящего момента, которое задается в качестве значения Tm* команды управления крутящим моментом электромотора.
Со ссылкой на фиг. 11, приводится описание относительно преимуществ, когда устройство управления электрического транспортного средства согласно варианту осуществления, описанному выше, применяется к электрическому транспортному средству.
Фиг. 11 является временной диаграммой, которая описывает пример результата управления посредством устройства управления электрического транспортного средства согласно варианту осуществления. Фиг. 11 показывает градиент (%) поверхности дороги, по которой движется транспортное средство, величину операции нажатия педали акселератора или тормоза обычным водителем в то время, когда транспортное средство движется по дороге с градиентом, и крутящий момент помощи при градиенте, вычисленный в соответствии с градиентом дороги и рабочей величины в то время, когда транспортное средство движется с фиксированной скоростью транспортного средства. Градиент (%), крутящий момент помощи при градиенте, позиция акселератора и рабочая величина нажатия педали тормоза показаны в этом порядке сверху. Положительный градиент (%) представляет дорогу, идущую в подъем, отрицательный градиент (%) представляет дорогу, идущую под спуск, и чем больше абсолютное значение градиента (%), тем более крутым является градиент.
Дополнительно, на чертеже, пунктирная линия, которая представляет крутящий момент помощи при градиенте, показывает крутящий момент помощи при градиенте, когда темп уменьшения величины коррекции градиента всегда равен 0, другими словами, оцененное значение Td возмущающего крутящего момента, которое почти совпадает с сопротивлением вследствие градиента.
Дополнительно, на чертеже, пунктирная линия, которая представляет позицию акселератора, указывает рабочую величину нажатия педали акселератора, когда темп уменьшения величины коррекции градиента всегда составляет 0%, другими словами, когда обработка управления замедлением не выполняется. Затем, пунктирная линия на чертеже указывает рабочую величину нажатия педали акселератора обычным водителем, когда темп уменьшения величины коррекции градиента всегда составляет 100%, другими словами, когда коррекция градиента не выполняется.
В t1-t2, градиент поверхности дороги изменяется с дороги, идущей в подъем, на дорогу, идущую под спуск в -10(%). После этого, когда обработка управления замедлением не выполняется, крутящий момент помощи при градиенте совпадает с оцененным значением Td возмущающего крутящего момента, как показано посредством пунктирной линии на чертеже. В этом случае, поскольку компонент сопротивления вследствие градиента подавляется посредством крутящего момента помощи при градиенте, позиция акселератора водителем становится постоянной.
С другой стороны, поскольку темп уменьшения величины коррекции градиента согласно варианту осуществления настоящего изобретения задается равным 50%, крутящий момент помощи при градиенте разделен почти на два по сравнению со случаем, в котором обработка управления замедлением не выполняется, за счет этого заставляя водителя ощущать то, что транспортное средство движется по дороге с градиентом с соответствующей вспомогательной величиной. Между тем, рабочая величина нажатия педали акселератора разделена на два по сравнению со случаем, в котором коррекция градиента не выполняется. Таким образом, посредством задания темпа уменьшения величины коррекции градиента равным приблизительно 50% на дороге, идущей в подъем, через относительно пологую дорогу, идущую под спуск, можно уменьшать рабочую величину нажатия педали акселератора по сравнению со случаем, в котором коррекция градиента не выполняется, заставляя водителя ощущать то, что транспортное средство движется по дороге с градиентом, без чувства дискомфорта.
В t2-t3, транспортное средство движется по дороге с относительно крутым спуском, на которой градиент поверхности дороги изменяется в диапазоне от -10(%) до -20(%). В этом случае, в случае если обработка управления замедлением не выполняется, компонент сопротивления вследствие градиента подавляется посредством крутящего момента помощи при градиенте. Следовательно, в ситуации, в которой крутой градиент изменяется на еще более крутой градиент, в то время как позиция акселератора остается идентичной, тормозная сила (замедление) увеличивается, и у водителя вызывается чувство дискомфорта при управлении.
С другой стороны, темп уменьшения величины коррекции градиента согласно варианту осуществления настоящего изобретения увеличивается по мере того, как градиент становится более крутым, и становится 100% при градиенте, более крутом, чем -15(%). Следовательно, поскольку величина помощи при градиенте уменьшается по мере того, как градиент становится более крутым, можно устранять чувство дискомфорта в отношении увеличения тормозной силы. Дополнительно, чтобы поддерживать или уменьшать скорость транспортного средства на дороге с крутым спуском, необходимо уменьшать позицию акселератора. Как результат, водитель отвечает за управление торможением и в силу этого не имеет чувства дискомфорта вследствие операции нажатия педали акселератора водителя. Дополнительно, поскольку соответствующая помощь по градиенту осуществляется при градиенте, более пологом, чем -15(%), можно уменьшать рабочую величину нажатия педали акселератора водителем по сравнению со случаем, в котором коррекция градиента не выполняется (пунктирная линия).
В t3 или позже, транспортное средство движется по дороге, идущей под спуск при градиенте поверхности дороги, более крутом, чем -20(%). Затем в случае, если обработка управления замедлением не выполняется, компонент сопротивления вследствие градиента подавляется посредством крутящего момента помощи при градиенте, аналогично вышеописанному. Следовательно, постоянная скорость транспортного средства поддерживается, хотя позиция акселератора является постоянной.
С другой стороны, темп уменьшения величины коррекции градиента согласно варианту осуществления настоящего изобретения уменьшается до значения, которое не заставляет транспортное средство ускоряться, даже когда позиция акселератора равна 0 на дороге, идущей под спуск, более крутой, чем -20(%), за счет этого увеличивая величину помощи при градиенте. Таким образом, на дороге с градиентом, более крутым, чем -20(%), увеличение скорости транспортного средства с полностью закрытой позицией акселератора сдерживается. Следовательно, можно устранять беспокойство, которое может ощущаться на дороге, идущей под спуск с крутым градиентом, когда транспортное средство ускоряется с полностью закрытой позицией акселератора, за счет этого улучшая чувство защищенности водителя. Дополнительно, когда водитель намеревается замедлять или останавливать транспортное средство, водитель может стимулироваться на то, чтобы переходить к операции нажатия педали тормоза из ситуации, когда педаль акселератора является полностью закрытой.
Как описано выше, устройство управления электрического транспортного средства согласно варианту осуществления представляет собой устройство управления, которое включает в себя электромотор 4, который обеспечивает тормозную силу или движущую силу для транспортного средства в соответствии с операцией нажатия педали акселератора, и реализует способ управления электрическим транспортным средством, посредством которого управляется тормозная сила, когда рабочая величина нажатия педали акселератора меньше заданного значения, и управляется движущая сила, когда рабочая величина нажатия педали акселератора составляет заданное значение или больше. Устройство управления электрического транспортного средства оценивает возмущающий крутящий момент, который действует на электромотор 4 в качестве компонента сопротивления, связанного с градиентом, и выполняет коррекцию, посредством которой тормозная сила либо движущая сила увеличивается или уменьшается таким образом, чтобы подавлять компонент сопротивления на основе оцененного значения возмущающего крутящего момента. Затем на дороге, идущей под спуск при заданном градиенте или больше, величина коррекции тормозной силы или движущей силы уменьшается. Дорога, идущая под спуск при заданном градиенте или больше, означает дорогу, идущую под спуск, которая имеет заданный градиент или крутой градиент, более крутой, чем заданный градиент. Таким образом, на дороге с градиентом, при уменьшении рабочей величины нажатия педали акселератора водителя, которая требуется для того, чтобы реализовывать запрос на ускорение/замедление водителя, величина коррекции градиента уменьшается до соответствующей величины коррекции градиента на дороге, идущей под спуск при относительно крутом градиенте, за счет этого сдерживая чувство дискомфорта, ощущаемое водителем.
С помощью устройства управления электрического транспортного средства согласно варианту осуществления, когда задается верхнее предельное значение величины коррекции (величины помощи при градиенте), заданный градиент, при котором величина коррекции уменьшается, задается равным максимальному значению градиента, при котором транспортное средство имеет возможность останавливаться с помощью тормозного крутящего момента, полученного посредством суммирования величины коррекции с верхним предельным значением с тормозной силой, сформированной в транспортном средстве, когда рабочая величина нажатия педали акселератора равна 0. Таким образом, ситуация, когда величина коррекции градиента уменьшается, происходит только на дороге, идущей под спуск, на которой операция нажатия педали тормоза требуется в любом случае, чтобы останавливать транспортное средство. Следовательно, необязательно увеличивать операции нажатия педали тормоза вследствие уменьшения величины коррекции градиента, и в силу этого можно сдерживать чувство дискомфорта, ощущаемое водителем.
Дополнительно, с помощью устройства управления для электрического транспортного средства согласно варианту осуществления, на дороге, идущей под спуск при заданном крутом градиенте или больше, причем крутой градиент является более крутым, чем вышеприведенный заданный градиент, величина коррекции (величина помощи при градиенте) задается таким образом, что ускорение транспортного средства становится равным 0 или меньше вследствие тормозной силы, сформированной в транспортном средстве, когда рабочая величина нажатия педали акселератора равна 0. Дополнительно, вышеприведенный крутой градиент задается равным градиенту, при котором ускорение транспортного средства становится равным 0 вследствие тормозной силы, сформированной в транспортном средстве, когда рабочая величина нажатия педали акселератора равна 0. Таким образом, на дороге, идущей под спуск при крутом градиенте, можно сдерживать ускорение транспортного средства, даже когда позиция акселератора является полностью закрытой. Следовательно, можно вызывать у водителя чувство защищенности относительно управления тормозной силой транспортного средства только посредством операции нажатия педали акселератора, при сдерживании чувства дискомфорта, ощущаемого водителем, посредством уменьшения величины коррекции градиента.
Выше описывается устройство управления электрического транспортного средства согласно варианту осуществления настоящего изобретения. Тем не менее, настоящее изобретение не ограничено вышеприведенным вариантом осуществления, и возможны различные деформации и варианты применения. Например, хотя конфигурация блока управления для вычисления значения Tm1* первого целевого крутящего момента описывается со ссылкой на фиг. 4, необязательно предоставлять все компоненты, показанные на фиг. 4, и, например, ограничитель 405 скорости и фильтр 406 нижних частот могут опускаться.
Дополнительно, в вышеприведенном описании, когда рабочая величина нажатия педали акселератора составляет заданное значение или меньше, а также момент времени находится в момент времени непосредственно перед остановкой электрического транспортного средства, выполняется управление остановкой, посредством которого значение Tm* команды управления крутящим моментом электромотора сходится к оцененному значению скорректированного возмущающего крутящего момента Td (вспомогательного крутящего момента возмущений) по мере того, как частота вращения электромотора 4 уменьшается. Тем не менее, поскольку параметры скорости/частоты вращения, такие как скорость вращения колес, скорость кузова транспортного средства и частота вращения ведущего вала, имеют пропорциональную взаимосвязь с частотой вращения электромотора 4, значение Tm* команды управления крутящим моментом электромотора может сходиться к оцененному значению Td возмущающего крутящего момента по мере того, как параметры скорости/частоты вращения, пропорциональные частоте вращения электромотора 4, снижаются. Кроме того, во-первых, не всегда обязательно выполнять вышеприведенное управление остановкой непосредственно перед остановкой транспортного средства, и обработка управления остановкой согласно этапу S203 на фиг. 2 может опускаться.
Реферат
Группа изобретений относится к управлению тяговой системой транспортных средств с электротягой. Способ управления электромотором электрического транспортного средства заключается в следующем. Оценивают возмущающий крутящий момент, который действует на электромотор в качестве компонента сопротивления, связанного с градиентом. Выполняют коррекцию, посредством которой тормозная сила или движущая сила увеличивается и уменьшается для того, чтобы подавлять компонент сопротивления в соответствии с оцененным значением возмущающего крутящего момента. Уменьшают величину коррекции тормозной силы или движущей силы на дороге, идущей под спуск, при заданном или более крутом градиенте. Вычисляют верхнее предельное значение величины коррекции на основе значения крутящего момента, которое позволяет транспортному средству останавливаться, когда рабочая величина нажатия педали акселератора равна 0 при заданном градиенте. Также заявлено устройство управления электромотором электрического транспортного средства. Технический результат заключается в повышении комфорта управления электрического транспортного средства. 2 н. и 3 з.п. ф-лы, 11 ил.
Формула
Документы, цитированные в отчёте о поиске
Автомобиль и способ управления автомобилем
Комментарии