Устройство управления предотвращением отката при трогании с места транспортного средства с электроприводом - RU2536752C1
Код документа: RU2536752C1
Чертежи







Описание
Область техники
Настоящее изобретение относится к транспортному средству с электроприводом, такому как электромобиль с использованием только электромотора в качестве источника мощности или гибридное транспортное средство с использованием энергии для движения как от двигателя внутреннего сгорания, так и электромотора.
В частности, настоящее изобретение относится к технологии предотвращения отката при трогании с места транспортного средства с электроприводом, для которого не допускается откат в направлении, противоположном направлению трогания с места, когда электромобиль начинает движение вперед или назад, например, на подъеме, вследствие градиента (уклона) дороги и т.п.
Уровень техники
Транспортное средство с электроприводом допускает движение посредством передачи движущей силы электромотора/генератора на колеса и дополнительно допускает торможение колес посредством совместного управления рекуперативным торможением за счет ассоциированной с выработкой электричества нагрузки электромотора/генератора и фрикционным торможением за счет гидравлического тормозного модуля при необходимости. Электроэнергия, которая вырабатывается посредством электромотора/генератора, накапливается или заряжается в аккумуляторе для использования в качестве электроэнергии во время приведения в движение за счет электромотора.
В этой связи при выполнении операций торможения для колес посредством взаимодействия между рекуперативным торможением и фрикционным торможением в традиционной тормозной системе взаимодействия, в общем, приоритет отдается рекуперативному торможению с точки зрения скорости восстановления энергии, и если торможение колес посредством просто рекуперативного торможения является недостаточным для того, чтобы достигать целевого тормозного момента, требуемого водителем, нехватка компенсируется посредством фрикционного торможения.
Следовательно, при попытке выполнять трогание с места транспортного средства с электроприводом, например, на дороге, идущей в подъем, посредством отпускания педали тормоза и нажатия на педаль акселератора, транспортное средство может откатываться в направлении, противоположном направлению начала движения или трогания с места, вследствие градиента дороги. Чтобы управлять и не допускать этого отката при трогании с места, как описано в Патентном документе 1, например, колеса должны тормозиться через рекуперативное торможение, чтобы не допускать отката транспортного средства.
Патентная литература
Патентный документ 1: публикация выложенной заявки на патент Японии № 2007-203975.
Задачи, на решение которых направлено изобретение
Тем не менее, если аккумулятор источника питания находится в полностью заряженном или почти полностью заряженном состоянии, либо зарядка аккумулятора ограничивается при экстремально низкой температуре, не допускается выработка электричества посредством электромотора/генератора при выполнении рекуперативного торможения на колесах.
В этом случае электромотор/генератор не может выводить движущую силу посредством функционирования в качестве генератора, транспортное средство с электроприводом непрерывно откатывается в обратном направлении относительно требуемого водителем направления, несмотря на попытку выполнять трогание с места транспортного средства посредством нажатия педали акселератора после отпускания педали тормоза, возникает проблема появления чувства дискомфорта у водителя.
Настоящее изобретение направлено на создание устройства управления предотвращением отката транспортного средства с электроприводом при приведении в движение колес вместо рекуперативного торможения, и тем самым решать указанную проблему и не допускать отката транспортного средства с электроприводом посредством фрикционного торможения в случае, когда транспортное средство с электроприводом откатывается вследствие отсутствия рекуперативной тормозной силы за счет ограничения изменения.
Механизм для решения задачи
С этой целью устройство управления для предотвращения отката транспортного средства при трогании с места согласно настоящему изобретению имеет следующую конфигурацию.
Во-первых, приводится описание транспортного средства с электроприводом, к которому предположительно должно применяться настоящее изобретение.
Транспортное средство допускает движение посредством передачи движущей силы из вращающейся электрической машины на колеса, и колеса допускают торможение за счет рекуперативного торможения посредством нагрузки, ассоциированной с выработкой электричества посредством электрической машины, и фрикционного торможения по мере необходимости.
Транспортное средство с электроприводом с таким устройством управления предотвращением согласно настоящему изобретению при трогании с места характеризуется наличием модуля определения сдерживания или ограничения зарядки, модуля определения операции трогания с места, модуля определения отката транспортного средства и модуля управления фрикционным торможением.
Модуль определения сдерживания зарядки, который определяет то, что зарядка вращающейся электрической машины ограничивается, и модули определения операции трогания с места определяют операцию трогания с места водителем. Модуль определения отката транспортного средства определяет то, что транспортное средство откатывается в направлении, противоположном направлению трогания с места, когда модуль определения трогания с места определяет операцию трогания с места.
Модуль управления фрикционным торможением активирует вышеописанное фрикционное торможение, когда модуль определения операции трогания с места и модуль определения отката транспортного средства определяют откат транспортного средства при трогании с места, и модуль ограничения зарядки определяет ограничение зарядки.
Преимущества изобретения
Согласно устройству управления предотвращением отката согласно настоящему изобретению при трогании с места, когда происходит откат транспортного средства в ходе операции трогания с места, требуется торможение колес для того, чтобы не допускать этого отката, и зарядка источника питания ограничивается или сдерживается, то колеса должны тормозить посредством фрикционной тормозной силы.
Следовательно, в случае, если рекуперативное торможение недоступно вследствие ограничения зарядки, фрикционный тормоз приспособлен тормозить колеса, чтобы не допускать отката при операции трогания с места. Таким образом, можно надежно не допускать отката при операции трогания с места в течение периода ограничения зарядки, тем самым разрешая вышеописанную проблему.
Согласно настоящему изобретению также может исключаться такая ситуация, когда выполняется рекуперативное торможение, и рекуперативная мощность избыточно заряжает источник питания, несмотря на период сдерживания зарядки.
Краткое описание чертежей
Фиг. 1 является схемой системы, схематично показывающей систему управления приведением в действие и торможением транспортного средства для транспортного средства с электроприводом при виде сверху, которое оснащается устройством управления предотвращением отката при трогании с места, в первом варианте осуществления настоящего изобретения.
Фиг. 2 является блок-схемой последовательности операций способа для программы управления крутящим моментом электромотора, включающей в себя управление крутящим моментом электромотора для предотвращения отката при трогании с места, которая выполняется посредством универсального контроллера с фиг. 1.
Фиг. 3 является блок-схемой последовательности операций способа для программы управления тормозным гидравлическим или жидкостным давлением, включающей в себя управление тормозным давлением для предотвращения отката при трогании с места, которая выполняется посредством универсального контроллера с фиг. 1.
Фиг. 4 является блок-схемой последовательности операций способа, показывающей подпрограмму, связанную с процессом определения нажатия тормоза, в программе управления давлением тормозной жидкости, показанной на фиг. 2.
Фиг. 5 является блок-схемой последовательности операций способа, показывающей подпрограмму, связанную с процессом определения нажатия педали акселератора, в программе управления крутящим моментом электромотора, показанной на фиг. 2.
Фиг. 6 является блок-схемой последовательности операций способа, показывающей подпрограмму, связанную с процессом определения отката, в программе управления крутящим моментом электромотора, показанной на фиг. 2.
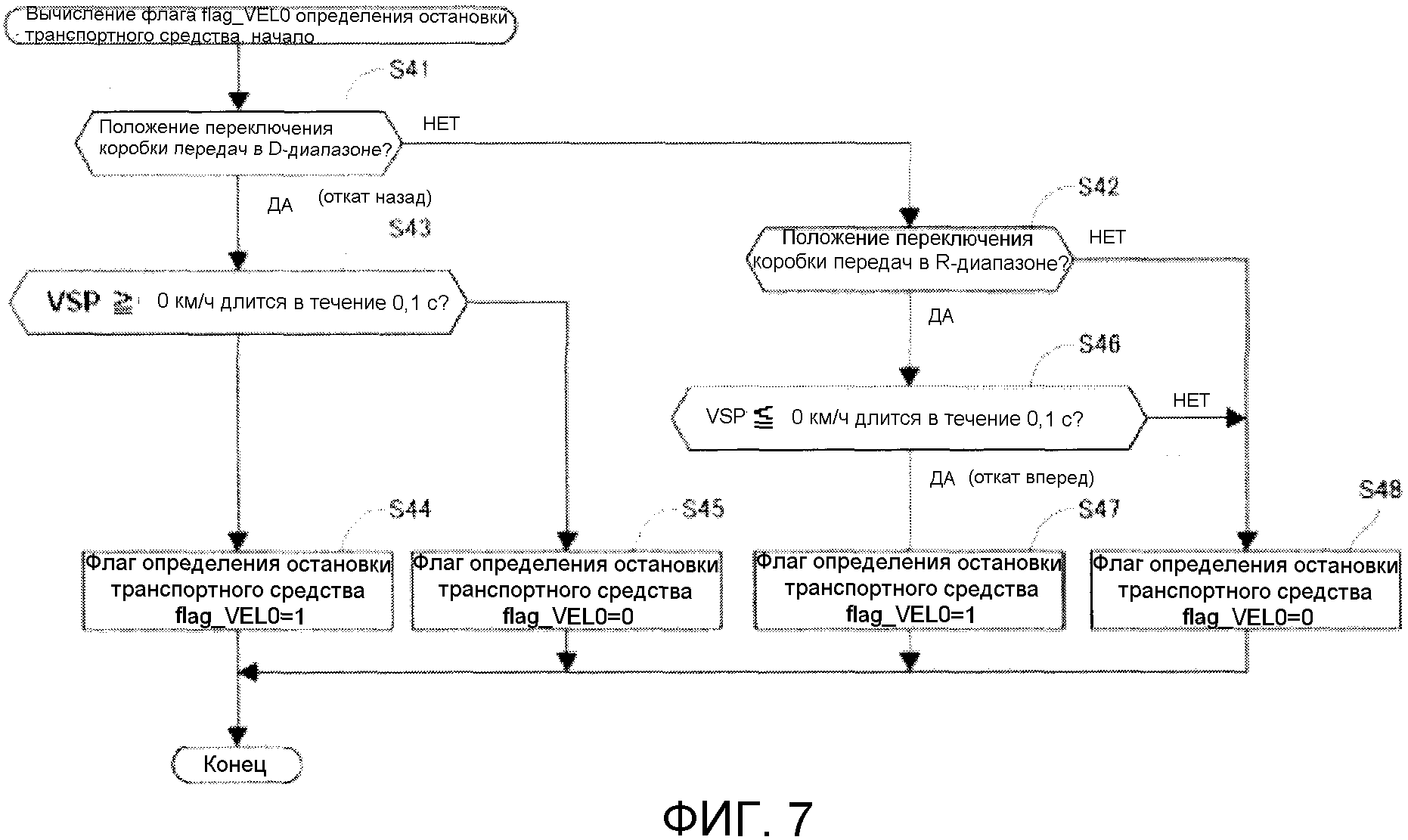
Фиг. 7 является блок-схемой последовательности операций способа, показывающей подпрограмму, связанную с процессом определения остановки транспортного средства, в программе управления крутящим моментом электромотора, показанной на фиг. 2.
Фиг. 8 является блок-схемой последовательности операций способа, показывающей подпрограмму, связанную с процессом определения для выполнения управления предотвращением отката при трогании с места, в программе управления крутящим моментом электромотора на фиг. 2.
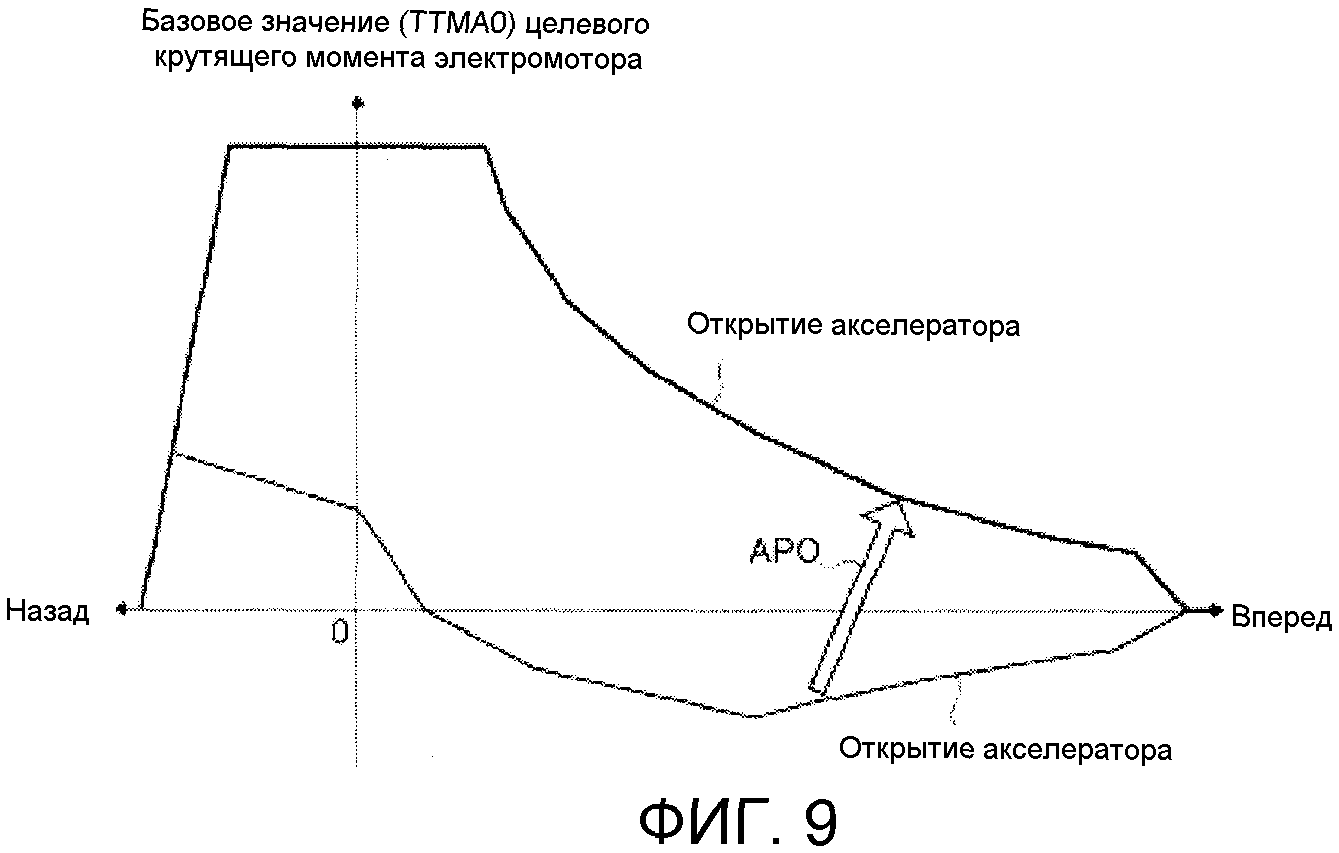
Фиг. 9 является характеристической схемой, показывающей характеристику варьирования базового значения целевого крутящего момента электромотора с использованием скорости транспортного средства и позиции педали акселератора в качестве параметров.
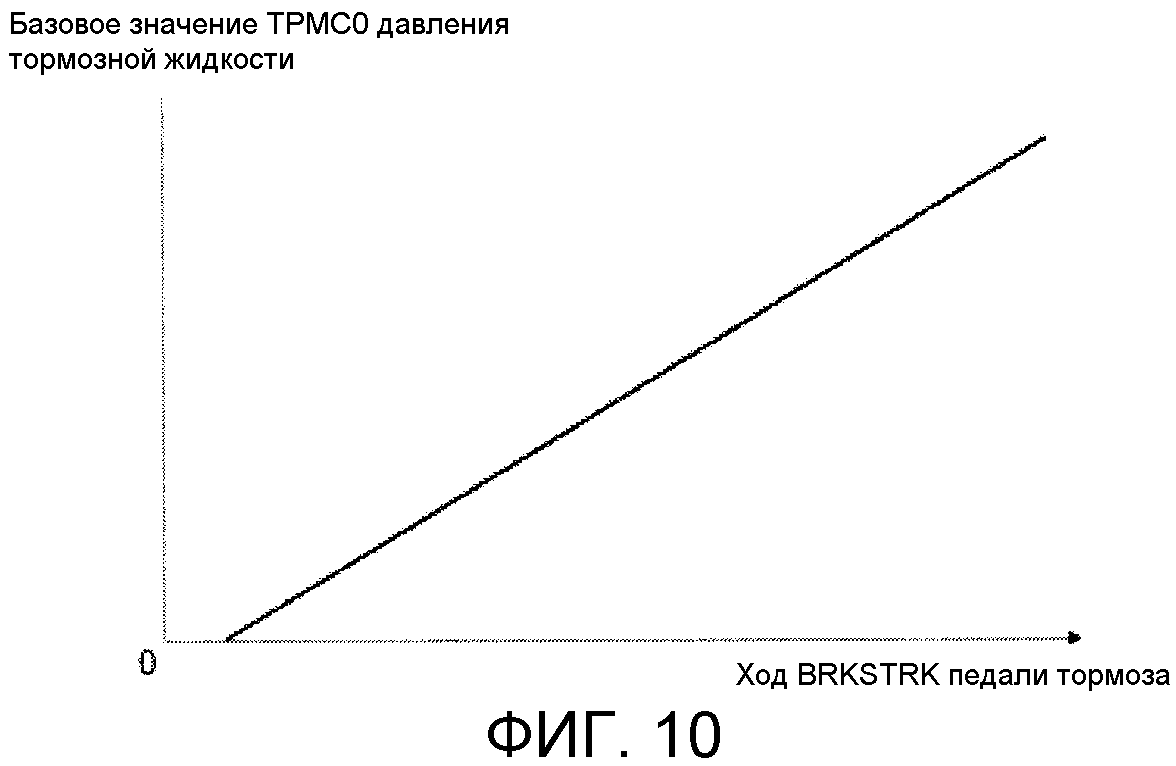
Фиг. 10 является характеристической схемой, показывающей изменение характеристик базового значения давления тормозной жидкости относительно хода педали тормоза.
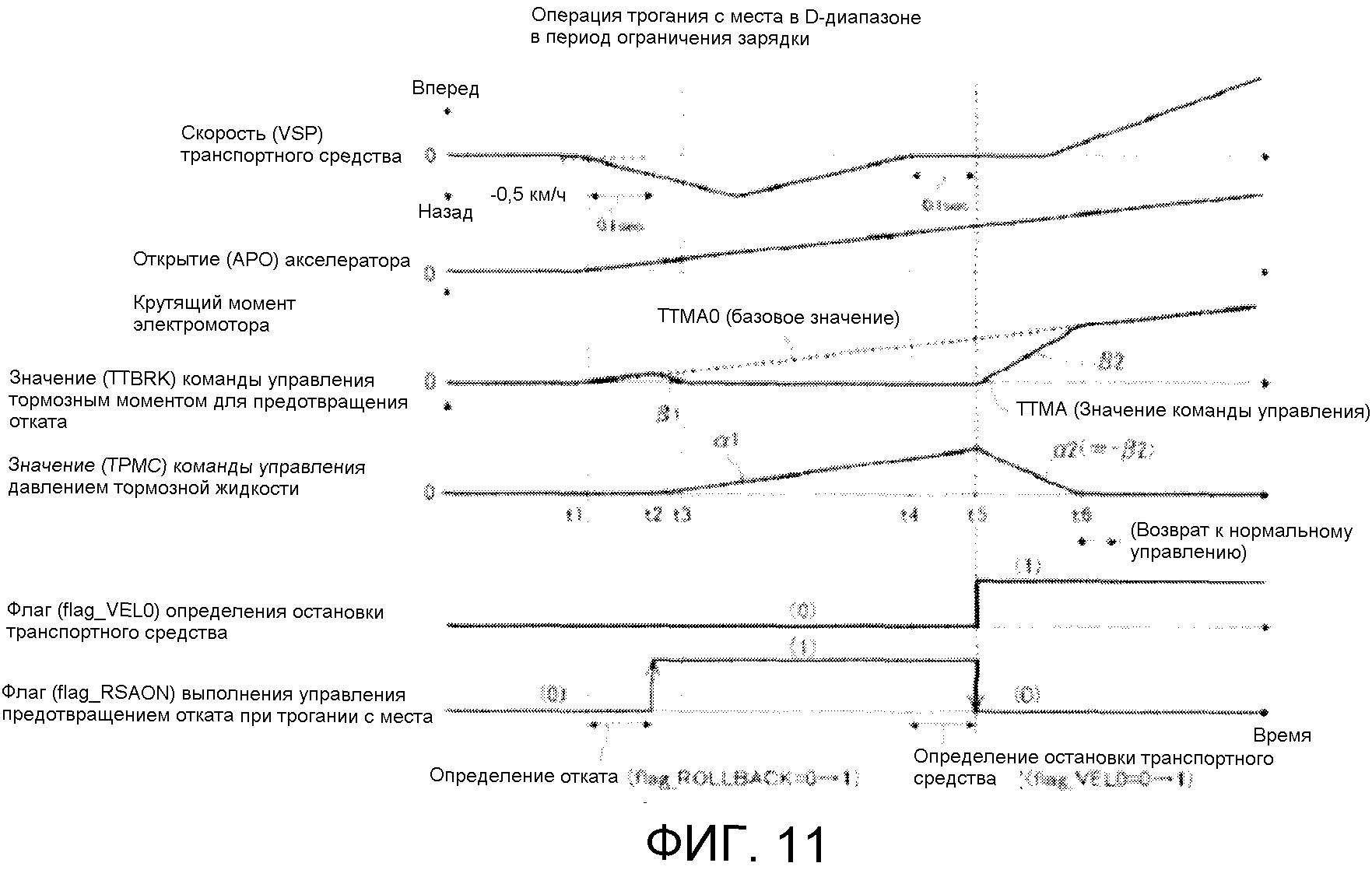
Фиг. 11 является временной диаграммой работы контроллера при трогании с места для устройства управления предотвращением отката в первом варианте осуществления, показанном на фиг. 1-10.
Фиг. 12 является временной диаграммой работы контроллера при трогании с места для устройства управления предотвращением отката во втором варианте осуществления при работе в условиях, идентичных условиям на фиг. 11.
Перечень ссылочных позиций
1L, 1R - левое и правое передние колеса
2L, 2R - левое и правое задние колеса
3 - электромотор (вращающаяся электрическая машина)
4 - редуктор
5 - контроллер электромотора
6 - аккумулятор (источник питания)
7 - инвертор
8 - универсальный или интегрированный контроллер
9L, 9R, 10L, 10R - тормозной диск
11L, 11R, 12L, 12R - тормозной модуль
13 - устройство управления давлением тормозной жидкости
14 - тормозной контроллер на основе давления жидкости
21 - датчик хода педали тормоза
22 - переключатель передач
23 - датчик открытия или положения акселератора
Наилучший способ осуществления изобретения
Далее приводится описание вариантов осуществления согласно настоящему изобретению со ссылкой на прилагаемые чертежи.
Первый вариант осуществления изобретения
Конфигурация
Фиг. 1 является схемой системы, схематично показывающей систему управления приведением в действие и торможением транспортного средства для транспортного средства с электроприводом при виде сверху, которое оснащается устройством управления предотвращением отката при трогании с места, в первом варианте осуществления настоящего изобретения. На фиг. 1, 1L, 1R, соответственно, обозначают левое и правое передние колеса, тогда как 2L, 2R - левое и правое задние колеса.
Транспортное средство с электроприводом, показанное на фиг. 1, сконфигурировано как электромобиль, который может двигаться посредством приведения в движение левого и правого задних колес 2L, 2R через электромотор (электромотор/генератор) в качестве вращающейся электрической машины через редуктор 4, включающий в себя дифференциальную зубчатую передачу.
Для управления электромотором 3 контроллер 5 электромотора выполнен с возможностью преобразования из постоянного тока в переменный мощности из аккумулятора 6 (источника питания), подачи мощности переменного тока в электромотор 3 под управлением инвертора 7 и управляет электромотором 3 таким образом, что крутящий момент электромотора 3 совпадает со значением TTMA команды управления крутящим моментом электромотора из универсального контроллера 8.
В случае если значение TTMA команды управления крутящим моментом электромотора из универсального контроллера 8 имеет отрицательную полярность, что требует действия рекуперативного торможения в отношении электромотора 3, контроллер 5 электромотора прикладывает ассоциированную с выработкой электроэнергии нагрузку к электромотору 3 без результирующей избыточной зарядки аккумулятора 6. В это время мощность, сформированная посредством электромотора 3 посредством этой операции рекуперативного торможения, подвергается преобразованию из переменного тока в постоянный посредством инвертора 7 для зарядки аккумулятора 6.
Электромобиль, показанный на фиг. 1, также допускает торможение посредством фрикционного торможения, как описано ниже, в дополнение к вышеуказанному рекуперативному торможению, и оборудуется составным тормозом, состоящим из рекуперативной тормозной системы и фрикционной тормозной системы.
Фрикционная тормозная система состоит из известного гидравлического устройства дискового тормоза и вкратце пояснена ниже.
Это устройство дискового тормоза содержит тормозные диски 10L, 10R, которые вращаются вместе с левым и правым передними колесами 1L, 1R, и тормозные диски 9L, 9R, которые вращаются вместе с левым и правым задними колесами 2L, 2R. Эти тормозные диски 10L, 10R и 9L и 9R зажимаются путем сдавливания с обеих сторон в осевом направлении, так что левое и правое передние колеса 1L, 1R и левое и правое задние колеса 2L, 2R могут быть отдельно управляемыми для фрикционного торможения.
Тормозной модуль 11L, 11R и 12L, 12R выполняет операцию, описанную выше, посредством давления тормозной жидкости из устройства 13 управления давлением тормозной жидкости.
Относительно управления давлением тормозной жидкости тормозной контроллер 14 на основе гидравлического или жидкостного давления реагирует на сигнал из датчика 21 хода педали тормоза для определения хода BRKSTRK педали тормоза и нижеописанное значение TTBRK команды управления тормозным моментом из универсального контроллера 8 для предотвращения отката при трогании с места. Устройство 13 управления давлением тормозной жидкости затем управляется таким образом, что значение TPMC команды управления давлением тормозной жидкости (целевое давление жидкости в главном цилиндре) в тормозной модуль 11L, 11R, 12L и 12R определяется таким образом, что общий фрикционный тормозной момент транспортного средства совпадает с требуемым водителем тормозным моментом в соответствии с ходом BRKSTRK педали тормоза для операции торможения посредством нажатия педали тормоза, с одной стороны, и совпадает с тормозным моментом TTBRK для предотвращения отката при трогании с места для операции трогания с места при нажатии педали акселератора, с другой стороны, и затем подает это определенное значение TPMC команды управления давлением тормозной жидкости (целевое давление жидкости в главном цилиндре) в тормозной модуль 11L, 11R, 12L и 12R.
Интегрированный или универсальный контроллер 8 отвечает за управление энергопотреблением всего транспортного средства и может управлять транспортным средством с максимальной эффективностью на основе различной входной информации (не показана). С этой целью значение TTBRK команды управления тормозным моментом для вышеописанного тормозного контроллера 14 на основе давления жидкости и значение TTMA команды управления крутящим моментом электромотора (отрицательный рекуперативный тормозной момент) передается в контроллер 5 электромотора.
Управление предотвращением отката при трогании с места
Универсальный контроллер 8 и тормозной контроллер 14 на основе давления жидкости выполняют программу управления крутящим моментом электромотора на фиг. 2 и программу управления давлением тормозной жидкости на фиг. 3, соответственно, с назначенными интервалами прерывания, т.е. каждые 10 мс, например, и передают и принимают рабочие данные между собой через связь, с тем чтобы выполнять управление предотвращением отката при трогании с места, которое описывается ниже и является целью настоящего изобретения.
Таким образом, универсальный контроллер 8 принимает мощность PIN зарядки аккумулятора, определенную на основе состояния зарядки, температуры и т.п. аккумулятора 6. Он дополнительно принимает сигнал из переключателя 22 передач, который управляется водителем при инструктировании режима движения транспортного средства (D-диапазон для переднего хода, R-диапазон для заднего хода и P-, N-диапазоны для операции парковки, остановки), и сигнал из датчика 23 открытия или позиции педали акселератора (APO), представляющий величину нажатия или ход педали акселератора.
С другой стороны, тормозной контроллер 14 на основе давления жидкости принимает сигнал из датчика 21, связанный с ходом педали тормоза.
Программа управления давлением тормозной жидкости на фиг. 3, выполняемая посредством контроллера 14 давления тормозной жидкости, сначала на этапе SB-01 выполняет определение и вычисление входных параметров, включающих в себя сигнал из датчика 21, связанный с ходом BRKSTRK педали тормоза.
На следующем этапе SB-02, флаг (flag_BRK) определения нажатия педали тормоза вычисляется посредством процесса, показанного на фиг. 4
При вычислении флага (flag_BRK) определения нажатия педали тормоза выполняется проверка в отношении того, равен или превышает либо нет ход BRKSTRK педали тормоза заданное значение (10 мм на фиг. 4), которое задано для определения операции торможения вследствие нажатия педали тормоза.
Когда определяется, что ход BRKSTRK педали тормоза равен или превышает заданное значение (10 мм), выполняется определение в отношении того, что выполняется операция торможения посредством нажатия педали тормоза, и на этапе S12 флаг (flag_BRK) определения нажатия педали тормоза задается равным "1", чтобы указывать то, что выполняется операция торможения.
Тем не менее, при определении того, что ход BRKSTRK педали тормоза меньше заданного значения (10 мм), выполняется определение в отношении того, что операция торможения вследствие нажатия педали тормоза не осуществляется, и на этапе S12 флаг (flag_BRK) определения нажатия педали тормоза сбрасывается до "0", чтобы указывать то, что операция торможения не выполняется.
На следующем этапе SB-03 на фиг. 3 контроллер 14 давления тормозной жидкости выполняет процесс передачи данных, чтобы передавать флаг (flag_BRK) определения нажатия педали тормоза в универсальный контроллер 8.
В программе управления крутящим моментом электромотора на фиг. 2, выполняемой посредством универсального контроллера 8, сначала на этапе SV-01 определяется то, что вводятся входные параметры, включающие в себя сигнал из датчика 23, представляющий позицию или открытие педали акселератора (APO), и сигнал из переключателя 23 передач, представляющий позицию переключения коробки передач (D-, R-, P-, N-диапазон).
На следующем этапе SV-02 универсальный контроллер 8 выполняет обработку приема данных и принимает, в дополнение к флагу (flag_BRK) определения нажатия педали тормоза, определенному и передаваемому посредством тормозного контроллера 14 на основе давления жидкости на этапах SB-02 на фиг. 3, как описано выше, информацию, связанную с частотой Nm вращения электромотора 3, передаваемую из контроллера 5 электромотора, показанного на фиг. 1, и информацию, связанную с мощностью (PIN) зарядки аккумулятора, из аккумулятора 6.
На следующем этапе SV-03 универсальный контроллер 8 вычисляет флаг (flag_APO) определения нажатия педали акселератора в соответствии с процессом, показанным на фиг. 5, который теперь описывается ниже.
На фиг. 5, на этапе S21 выполняется проверка, чтобы определять то, равно или превышает либо нет открытие APO педали акселератора заданное значение (5 градусов на фиг. 5) для определения того, что выполнена операция ускорения, включающая в себя операцию трогания с места вследствие нажатия педали акселератора.
Когда определяется, что открытие акселератора равно или превышает заданное значение (5 градусов), затем выполняется определение в отношении того, что выполняется операция ускорения посредством нажатия педали акселератора, и на этапе S22, флаг (flag_APO) определения нажатия педали акселератора задается равным "1", чтобы указывать то, что педаль акселератора находится в состоянии нажатия.
Тем не менее, когда определяется, что открытие APO педали акселератора меньше заданного значения (5 градусов), т.е. определяется состояние отсутствия нажатия педали акселератора, на этапе S23 флаг определения нажатия педали акселератора сбрасывается до 0 (flag_APO), чтобы указывать это состояние.
На следующем этапе SV-04 на фиг. 2, универсальный контроллер 8 вычисляет скорость транспортного средства (VSP), на основе частоты Nm вращения электромотора.
Помимо этого, универсальный контроллер 8 определяет посредством выполнения управляющей программы на фиг. 6 на этапе SV-05 (соответствующей модулю определения предотвращения отката согласно настоящему изобретению), находится или нет транспортное средство в состоянии отката, в котором транспортное средство откатывается в направлении, противоположном направлению трогания с места, при трогании с места вследствие градиента дороги и т.п. Затем универсальный контроллер 8 при определении того, что транспортное средство находится в откате, задает флаг определения отката равным "1", и если не находится в состоянии отката, флаг (flag_ROLLBACK) определения отката сбрасывается до "0".
Другими словами, сначала на этапах S31 и S32 на фиг. 6 выполняется определение касательно позиции переключения коробки передач, т.е. того, что водитель выбирает D-диапазон для переднего хода, R-диапазон для заднего хода и P- или N-диапазон для состояния отсутствия движения.
На этапе S33, если на этапе S31 определено, что выбран D-диапазон, выполняется определение в отношении состояния отката, в котором транспортное средство откатывается в направлении, противоположном (т.е. назад) направлению трогания с места (т.е. трогания с места передним ходом вследствие D-диапазона), в зависимости от того, продолжается или нет эта ситуация в течение предварительно определенного времени (0,1 секунды на фиг. 6), при том, что скорость VSP транспортного средства равна или меньше скорости транспортного средства для определения отката (-0,5 км/ч, фиг. 6).
Когда определено, что возникает состояние отката, на этапе S34 флаг (flag_ROLLBACK) определения отката задается равным "1", что указывает это состояние, а когда определено, что состояние не является состоянием отката, на этапе S35 флаг (flag_ROLLBACK) определения отката сбрасывается до "0", чтобы указывать этот факт.
На этапе S36, если на этапе S32 определено, что выбран R-диапазон, выполняется определение в отношении состояния отката, в котором транспортное средство откатывается в направлении, противоположном (т.е. вперед) направлению трогания с места (т.е. трогания с места задним ходом вследствие R-диапазона) в зависимости от того, продолжается или нет эта ситуация в течение предварительно определенного времени (0,1 секунды на фиг. 6), при том, что скорость VSP транспортного средства равна или меньше скорости транспортного средства для определения отката (0,5 км/ч фиг. 6).
Когда определено, что возникает состояние отката, на этапе S37 флаг (flag_ROLLBACK) определения отката задается равным "1", что указывает это состояние, а когда определено, что состояние не является состоянием отката, на этапе S38 флаг (flag_ROLLBACK) определения отката сбрасывается до "0", чтобы указывать этот факт.
Следует отметить, что на этапах S31 и этап S32, если определено, что выбирается N-диапазон или P-диапазон для отсутствия движения, нет необходимости в определении отката, поскольку эти диапазоны не являются диапазонами движения для операции трогания с места. На этапе S38, флаг (flag_ROLLBACK) определения отката сбрасывается до "0".
Затем универсальный контроллер 8 определяет то, находится или нет транспортное средство в остановленном или неподвижном состоянии (либо состоянии трогания с места) без отката, посредством выполнения управляющей программы на фиг. 7 на этапе SV-06 (соответствующей модулю определения застопоренного состояния) на фиг. 3.
Когда определено, как остановленное состояние (либо состояние трогания с места) без отката, флаг (flag_VEL0) определения остановки транспортного средства задается равным "1", а когда определено, что транспортное средство по-прежнему откатывается при отсутствии неподвижности, флаг (flag_VEL0) определения остановки транспортного средства сбрасывается до "0", чтобы указывать этот факт.
Другими словами, на этапе S42 и этап S41 на фиг. 7 позиция переключения коробки передач, выбранная посредством переключателя 2 передач, определяется посредством идентификации D-диапазона для переднего хода, R-диапазона для заднего хода либо P- или N-диапазона для состояния неготовности к движению.
На этапе S43, если определено как D-диапазон на этапе S41, в зависимости от того, длится или нет в течение предварительно определенного времени (0,1 секунды на фиг. 7) ситуация, когда скорость VSP транспортного средства равна либо "нулю" (остановленное состояние), либо положительному значению (т.е. передний ход), выполняется определение в отношении того, находится или нет транспортное средство в остановленном состоянии или состоянии трогания с места в направлении, идентичном направлению трогания с места (т.е. трогания с места передним ходом вследствие D-диапазона), после того, как транспортное средство прекращает откат.
Когда определено, что транспортное средство находится в остановленном состоянии или состоянии трогания с места после того, как транспортное средство прекращает откат, на этапе S44 флаг (flag_VEL0) определения состояния остановки транспортного средства задается равным "1", тогда как когда определено, что транспортное средство еще не находится в остановленном состоянии или состоянии трогания с места, на этапе S45 флаг (flag_VEL0) определения остановки транспортного средства сбрасывается до "0", чтобы указывать это событие.
На этапе S43, если на этапе S42 определено, что выбран R-диапазон, выполняется определение, в зависимости от того, длится или нет в течение предварительно определенного времени (0,1 секунды на фиг. 7) ситуация, когда скорость VSP транспортного средства равна либо "нулю" (остановленное состояние), либо отрицательному значению (т.е. задний ход) после того, как транспортное средство прекращает откат, в отношении остановленного состояния или состояния трогания с места, в котором транспортное средство движется в направлении (т.е. назад), идентичном направлению трогания с места (т.е. трогания с места задним ходом вследствие R-диапазона).
Когда определено, что транспортное средство находится в остановленном состоянии или состоянии трогания с места после того, как транспортное средство прекращает откат, на этапе S48 флаг (flag_VEL0) определения остановки транспортного средства сбрасывается до "нуля", чтобы указывать эту ситуацию.
Следует отметить, что, когда определено на этапах S41 и S42, что транспортное средство находится в P-диапазоне или в N-диапазоне для отсутствия движения, поскольку они не являются диапазонами движения или передач для трогания с места, вышеописанное определение остановки транспортного средства является необязательным, и флаг (flag_VEL0) определения остановки транспортного средства сбрасывается до "0" на этапе S48.
Затем универсальный контроллер 8 определяет то, следует или нет выполнять управление предотвращением отката, которое является целью настоящего изобретения, посредством выполнения управляющей программы по фиг. 8 на этапе SV-07 на фиг. 3.
Когда определено выполнять управление предотвращением отката при трогании с места вследствие удовлетворения условий для его выполнения, флаг (flag_RSAON) выполнения управления предотвращением отката задается равным "1", чтобы указывать это событие.
Когда определено не выполнять управление предотвращением отката при трогании с места вследствие неудовлетворения условий для его выполнения, флаг (flag_RSAON) выполнения управления предотвращением отката сбрасывается до "0", чтобы указывать это событие.
Более конкретно, на этапе S51 на фиг. 8 выполняется проверка в отношении того, что позиция переключения коробки передач, выбранная посредством переключателя 2 передач, представляет собой диапазон движения, т.е. D-диапазон или R-диапазон, и аккумулятор 6 находится в периоде ограничения зарядки, в котором мощность PIN зарядки равна или меньше 5 кВт.
На этапе S52, после этапа S51, на котором диапазон движения выбран в течение периода ограничения зарядки, выполняется проверка на предмет наличия операции трогания с места в зависимости от того, что флаг (flag_BRK) определения нажатия педали тормоза равен "нулю" (состояние отсутствия торможения при ненажатой педали тормоза), и что флаг (flag_APO) определения нажатия педали акселератора равен "1" (т.е. состояние ускорения при нажатой педали акселератора).
Следовательно, этап S52 соответствует средству определения операции трогания с места.
На этапе S51, когда выполняется определение в отношении того, что диапазон отсутствия движения из P- или N-диапазона, или того, что мощность PIN зарядки аккумулятора 6 превышает 5 кВт, и не в периоде ограничения зарядки, в таком случае управление предотвращением отката при трогании с места согласно настоящему изобретению по-прежнему необходимо, и флаг (flag_RSAON) выполнения управления предотвращением отката сбрасывается до "нуля".
Дополнительно, даже если на этапе S51 выполняется определение в отношении выбора D-, R-диапазона (диапазона движения) в течение периода ограничения зарядки, при состоянии торможения (flag_BRK=1) посредством нажатия педали тормоза или состоянии отсутствия ускорения (flag_APO=0) при ненажатой педали акселератора, намерение ускорения (операции трогания с места) четко не подтверждается. Следовательно, управление предотвращением отката с точки зрения цели настоящего изобретения, очевидно, является необязательным. Флаг (flag_RSAON) выполнения управления предотвращением отката тем самым сбрасывается до "0", чтобы указывать эту ситуацию.
Когда определено, что диапазон движения выбран в течение периода ограничения зарядки на этапе S51, (flag_BRK) равен "0" на этапе S52 (состояние отсутствия торможения, в котором педаль тормоза не нажимается), и (flag_APO) равен "1" (педаль акселератора нажимается), т.е. когда определено, что выполняется операция трогания с места, на этапе S54 выполняется проверка в отношении того, осуществляется или нет управление предотвращением отката при трогании с места, в зависимости от того, равен или нет "0" предыдущий флаг (flag_RSAPN) выполнения управления предотвращением отката при трогании с места.
Когда управление предотвращением отката находится в состоянии отсутствия выполнения (деактивировано) на этапе S55, на этапе S55 выполняется проверка в отношении того, начинает или нет транспортное средство откат, в зависимости от того, равен или нет "1" флаг (flag_ROLLBACK) определения отката. Таким образом, этап S55 соответствует модулю определения отката транспортного средства согласно настоящему изобретению.
Когда (flag_ROLLBACK) определяется как "0" (не происходит откат при трогании с места), поскольку нет необходимости в управлении предотвращением отката при трогании с места, флаг (flag_RSAON) выполнения управления предотвращением отката остается равным "0" на этапе S55, т.е. идентичным предыдущему значению, проверенному на этапе S54.
Когда (flag_ROLLBACK) определяется как "1" (происходит откат при трогании с места), поскольку существует необходимость управления предотвращением отката при трогании с места, флаг (flag_RSAON) выполнения управления предотвращением отката задается равным "1" на этапе S57.
Когда определяется, что предыдущее значение флага (flag_RSAON) выполнения управления предотвращением отката при трогании с места равно "1", т.е. когда определяется, что выполняется (активировано) управление предотвращением отката, на этапе S58 выполняется проверка в отношении того, находится или нет транспортное средство в остановленном состоянии (или в состоянии трогания с места) после завершения предотвращения отката, в зависимости от того, равен или нет "1" флаг (flag_VEL0) определения остановки транспортного средства.
Следовательно, этап S58 соответствует средству определения остановки транспортного средства согласно настоящему изобретению.
Хотя определяется, что флаг (flag_VEL0) определения остановки транспортного средства не равен "1", т.е. управление предотвращением отката транспортного средства при трогании с места еще не завершено, и тем самым происходит откат, флаг (flag_RSAON) выполнения управления предотвращением отката поддерживается равным "1", т.е. предыдущему значению, проверенному на этапе S54.
Когда на этапе S58 определяется то, что флаг (flag_VEL0) определения остановки транспортного средства ранен "1", т.е. когда откат не происходит после завершения управления предотвращением отката, т.е. транспортное средство находится в остановленном состоянии (или состоянии трогания с места), флаг (flag_RSAON) выполнения управления предотвращением отката сбрасывается до "0" на этапе S60.
На этапе SV-08 универсальный контроллер 8 вычисляет базовое значение TTMA0 целевого крутящего момента электромотора, которое требуется водителем в текущем рабочем режиме, из открытия APO педали акселератора и скорости VSP транспортного средства на основе карты базовых значений целевого крутящего момента электромотора, проиллюстрированной на фиг. 9.
Универсальный контроллер 8 вычисляет значение (TTMA) команды управления крутящим моментом электромотора, которое следует инструктировать контроллеру 5 электромотора, как показано на фиг. 1, на следующем этапе SV-09 (соответствующем модулю управления вращающейся электрической машины и модулю подготовки к троганию с места).
Другими словами, когда флаг (flag_RSAON) выполнения управления предотвращением отката равен "0", значение (TTMA) команды управления крутящим моментом электромотора задается как идентичное значение относительно вышеуказанного базового значения целевого крутящего момента электромотора (TTMA0), т.е. (TTMA=TTMA0), при этом выполняется нормальное управление крутящим моментом электромотора.
Когда флаг (flag_RSAON) выполнения управления предотвращением отката переключается с "0" на "1", значение (TTMA) команды управления крутящим моментом электромотора задается так, что оно достигает "0" на постоянной скорости с началом при значении во время переключения (значении, идентичном базовому значению TTMA0 целевого крутящего момента электромотора). Напротив, когда флаг (flag_RSAON) выполнения управления предотвращением отката переключается с "1" на "0", значение (TTMA) команды управления крутящим моментом электромотора должно восстанавливаться или возвращаться до базового значения TTMA0 целевого крутящего момента электромотора на постоянной скорости изменения от "0" во время переключения, и управление возвращается к нормальному управлению крутящим моментом электромотора во время завершения восстановления, в которое TTMA равен TTMA0.
Универсальный контроллер 8 на этапе SV-10 на фиг. 2 вычисляет значение (TTBRK) команды управления тормозным моментом для предотвращения отката, которое должно быть инструктировано в тормозной контроллер 14 на основе давления жидкости на фиг. 1 (соответствующем модулю управления фрикционным торможением и модулю восстановления фрикционной тормозной силы), следующим образом.
Более конкретно, когда флаг (flag_RSAON) выполнения управления предотвращением отката равен "0", поскольку не выполняется управление предотвращением отката при трогании с места, значение (TTBRK) команды управления тормозным моментом для предотвращения отката задается равным "0" (т.е. TTBRK="0").
Когда флаг (flag_RSAON) выполнения управления предотвращением отката при трогании с места переключается с "0" на "1", значение (TTBRK) команды управления тормозным моментом для предотвращения отката увеличивается таким образом, что оно достигает значения крутящего момента, идентичного базовому значению TTMA0 целевого крутящего момента электромотора, от "0" во время переключения на постоянной скорости изменения.
Наоборот, когда флаг (flag_RSAON) выполнения управления предотвращением отката при трогании с места переключается с "1" на "0", значение (TTBRK) команды управления тормозным моментом для предотвращения отката уменьшается от значения во время переключения (значения крутящего момента, идентичного базовому значению TTMA0 целевого крутящего момента электромотора) таким образом, что оно в итоге достигает "0" (т.е. TTBRK="0").
Следует отметить, что в варианте осуществления, скорость уменьшения значения (TTBRK) команды управления тормозным моментом для управления предотвращением отката при трогании с места во время уменьшения задается идентичной скорости увеличения значения (TTMA) команды управления крутящим моментом электромотора от "0" до базового значения TTMA0 целевого крутящего момента электромотора, что выполняется на этапе SV-09 в ответ на изменение (flag_RSAON) с "1" на "0".
Универсальный контроллер 8 выполняет процесс передачи данных, в котором значение (TTBRK) команды управления тормозным моментом для предотвращения отката, полученное на этапе SV-10, должно быть передано в тормозной контроллер 14 на основе давления жидкости, показанный на фиг. 1, в то время как значение (TTMA) команды управления крутящим моментом электромотора, полученное на этапе SV-09, должно быть передано в контроллер 5 электромотора, показанный на фиг. 1.
На этапе SB-04 на фиг. 3, тормозной контроллер 14 на основе давления жидкости вычисляет базовое значение (TPMC0) давления тормозной жидкости, соответствующее тормозному моменту, который запрашивает водитель, на основе хода BRKSTRK педали тормоза в отношении карты, соответствующей характеристике давления тормозной жидкости, показанной на фиг. 10.
На следующем этапе SB-05 контроллер гидравлического тормоза 14 выполняет процесс приема данных на фиг. 1, чтобы принимать значение (TTBRK) команды управления тормозным моментом для предотвращения отката при трогании с места, передаваемое из универсального контроллера 8 на этапе SV-11 на фиг. 2.
Затем контроллер гидравлического тормоза 14 вычисляет значение (TPMC) команды управления тормозным жидкостным или гидравлическим давлением, которое должно быть передано в устройство 13 управления давлением тормозной жидкости, показанное на фиг. 1, на этапе SB-06 на фиг. 3, который соответствует модулю управления фрикционным торможением согласно настоящему изобретению.
Это значение (TPMC) команды управления давлением тормозной жидкости является значением команды управления давлением тормозной жидкости (целевым давлением жидкости в главном цилиндре), чтобы управлять тормозным модулем 11L, 11R, 12L и 12R таким образом, что общий фрикционной тормозной момент транспортного средства соответствует тормозному моменту, требуемому водителем согласно ходу BRKSTRK педали тормоза при операции торможения в ответ на нажатие педали тормоза, с одной стороны, и соответствует значению TTBRK команды управления тормозным моментом для предотвращения отката при трогании с места в ответ на нажатие педали акселератора.
Следовательно, значение (TPMC) команды управления давлением тормозной жидкости определяет принимать более высокое и выбирать более высокое между базовым значением TPMC0 давления тормозной жидкости, полученным на этапе SB-04, и давлением тормозной жидкости для предотвращения отката, требуемым для того, чтобы достигать значения TTBRK команды управления тормозным моментом для предотвращения отката при трогании с места, принимаемого на этапе SB-05.
Иллюстрация операции предотвращения отката при трогании с места
Работа устройства управления предотвращением отката в вышеописанном первом варианте осуществления теперь поясняется ниже в отношении операции трогания с места, показанной на фиг. 11, в которой открытие APO педали акселератора увеличивается, как проиллюстрировано от момента t1 времени в неподвижном или остановленном состоянии (скорость транспортного средства VSP=0) с работой в D-диапазоне согласно операции ограничения зарядки.
В ответ на операцию трогания с места вследствие увеличения открытия APO педали акселератора увеличивается базовое значение TTMA0 целевого крутящего момента электромотора, как показано посредством пунктирной линии.
Поскольку флаг flag_RSAON выполнения управления предотвращением отката равен "0" в первоначальный период трогания с места, и, следовательно, не выполняется управление предотвращением отката, значение TTMA команды управления крутящим моментом электромотора задается равным значению, идентичному базовому значению TTMA0 целевого крутящего момента электромотора.
Между прочим, когда транспортное средство откатывается в направлении, противоположном направлению трогания с места, вследствие градиента дороги, несмотря на значение TTMA команды управления крутящим моментом электромотора (=TTMA0), и в течение предварительно определенного времени в 0,1 секунду или более длится состояние, в котором скорость VSP транспортного средства равна или ниже скорости определения отката в -0,5 км/ч (этап S33, фиг. 6), флаг flag_ROLLBACK определения отката переключается с "0" на "1" в этот момент времени t2 (этап S34, фиг. 6). Таким образом, при трогании с места, флаг flag_RSAON выполнения управления предотвращением отката переключается с "0" на "1" (этап S57, фиг. 8), и управление предотвращением отката выполняется далее.
В момент t2 времени, когда флаг (flag_RSAON) выполнения управления предотвращением отката переключается с "0" на "1", значение (TTBRK) команды управления тормозным моментом для предотвращения отката увеличивается от момента t2 времени переключения в "0" с постоянной скоростью α1 изменения таким образом, что оно достигает идентичного значения крутящего момента с базовым значением TTMA0 целевого крутящего момента электромотора (этап SV-10, фиг. 2).
Затем, в ответ на увеличение значения (TTBRK) команды управления крутящим моментом для предотвращения отката при трогании с места, давление тормозной жидкости для предотвращения отката также увеличивается таким образом, что оно достигает его.
Между тем, как описано выше для этапа SB-06 на фиг. 3, значение TPMC команды управления давлением тормозной жидкости для устройства 13 управления тормозным гидравлическим давлением на фиг. 1 извлекается из более высокого значения между давлением тормозной жидкости для предотвращения отката при трогании с места и базовым значением TPMC0 давления тормозной жидкости, полученным на этапе SB-04 (т.е. посредством выбора более высокого значения), с тем чтобы достигать значения (TTBRK) команды управления тормозным моментом для предотвращения отката.
Тем не менее, при операции трогания с места, поскольку ход BRKSTRK равен "0" вследствие отпускания педали тормоза, базовое значение TPMC0 давления тормозной жидкости также равно "0".
Следовательно, значение TPMC команды управления давлением тормозной жидкости допускает значение, идентичное значению давления тормозной жидкости для предотвращения отката при трогании с места, и увеличивается так, как показано на фиг. 11 (на фиг. 11, для удобства показывается как линия, идентичная значению TTBRK команды управления тормозным моментом для предотвращения отката).
С другой стороны, после момента t2 времени, в который флаг (flag_RSAON) выполнения управления предотвращением отката переключается с "0" на "1", значение (TTMA) команды управления крутящим моментом электромотора снижается со значения в начальный момент t2 времени переключения (значения, идентичного базовому значению TTMA0 целевого крутящего момента электромотора) с постоянной скоростью β1 изменения таким образом, что оно в итоге достигает "0" в момент t3 времени (этап SV-09, фиг. 2).
Вследствие уменьшения значения (TTMA) команды управления крутящим моментом электромотора после момента t2 времени с поддерживаемым "0" после момента t3 времени и увеличения вышеописанного значения TTBRK команды управления тормозным моментом для предотвращения отката (значения TPMC команды управления давлением тормозной жидкости) при трогании с места, откат не допускается, как очевидно из изменения во времени скорости VSP транспортного средства.
В момент t4 времени на фиг. 11, в который предотвращение отката транспортного средства завершено, при том, что скорость VSP транспортного средства равна "0", определение остановки транспортного средства выполняется (этап S43, фиг. 7) в зависимости от того, продолжается или нет это состояние в течение предварительно определенного времени в 0,1 секунды. В момент t5 времени, в который состояние скорости транспортного средства в "0" длится в течение 0,1 секунды, флаг flag_VEL0 определения остановки транспортного средства переключается с "0" на "1" (этап S44, фиг. 7).
В ответ на переключение флага flag_VEL0 определения остановки транспортного средства с 0 на 1, в момент t5 времени флаг (flag_RSAON) выполнения управления предотвращением отката при трогании с места переключается с "1" на "0" (этап S58 и этап S60 на фиг. 8).
Когда в момент t5 времени флаг (flag_RSAON) выполнения управления предотвращением отката переключается с "1" на "0", значение (TTMA) команды управления крутящим моментом электромотора возвращается к базовому значению TTMA0 целевого крутящего момента электромотора (этап SV-09) от "0" во время переключения в момент t5 времени с постоянной скоростью β2 изменения, и управление возвращается к нормальному управлению крутящим моментом электромотора в момент t6 времени при завершении восстановления (где TTBRK равен "0") (этап SV-9, фиг. 2).
После момента t5 времени, в который флаг (flag_RSAON) выполнения управления предотвращением отката переключается с "1" на "0", значение (TTBRK) команды управления тормозным моментом для предотвращения отката при трогании с места снижается со значения в момент t5 времени переключения (т.е. значения, идентичного базовому значению TTMA0 целевого крутящего момента электромотора) с постоянной скоростью α2 изменения (идентичной скоростью со скоростью β2 увеличения крутящего момента электромотора) таким образом, что оно в итоге достигает "0" в момент t6 времени (этап SV-10, фиг. 2).
Помимо этого, наряду с уменьшением значения (TTBRK) команды управления тормозным моментом для предотвращения отката, значение (TPMC) команды управления давлением тормозной жидкости также уменьшается (этап SB-06, фиг. 3).
Вследствие снижения или уменьшения значения TTBRK команды управления тормозным моментом для предотвращения отката (значения TPMC команды управления давлением тормозной жидкости) на α2 наряду с восстановлением вышеописанного значения (TTMA) команды управления крутящим моментом электромотора до базового значения TTMA0 целевого крутящего момента электромотора на β2, транспортное средство может трогаться с места, как очевидно из скорости транспортного средства, которая равна или превышает нуль (т.е. VSP≥0).
Дополнительно, с учетом того, что скорость снижения или уменьшения значения TTBRK команды управления тормозным моментом для предотвращения отката (значения TPMC команды управления давлением тормозной жидкости) на α2 и восстановления вышеописанного значения (TTMA) команды управления крутящим моментом электромотора до базового значения TTMA0 целевого крутящего момента электромотора на β2 являются идентичными (т.е. α2=-β2), эти две операции выполняются в идентичный момент t6 времени, и как управление крутящим моментом электромотора, так и управление тормозом могут возвращаться к нормальному режиму управления в этот момент t6 времени и далее.
Преимущества
В этой связи в первом варианте осуществления, когда откат транспортного средства происходит при операции трогания с места, и требуется торможение колес, чтобы не допускать отката, с ограничением аккумулятора 6 касательно зарядки, колеса управляются таким образом, что они тормозят за счет трения, на основе значения TTBRK команды управления тормозным моментом для предотвращения отката (значения TPMC команды управления давлением тормозной жидкости) при трогании с места.
Следовательно, когда рекуперативное торможение недоступно, колеса тормозят посредством фрикционного тормоза (TTBRK), чтобы не допускать отката при трогании с места. Таким образом, может исключаться невыгодная ситуация, когда не может не допускаться откат при операции трогания с места в течение периода ограничения зарядки.
Дополнительно, также может исключаться такая ситуация, когда рекуперативное торможение выполняется, несмотря на период ограничения зарядки, и рекуперативная мощность избыточно заряжает аккумулятор 6.
Помимо этого, значение (TTMA) команды управления крутящим моментом электромотора задается равным "0", в то время как колеса тормозят за счет трения на основе значения TTBRK команды управления тормозным моментом для предотвращения отката (значения TPMC команды управления тормозной жидкостью). Таким образом, рекуперативный крутящий момент (TTMA) не выводится посредством электромотора 3 при значении команды управления крутящим моментом электромотора (TTMA=TTMA0) в зависимости от открытия APO педали акселератора, несмотря на операцию предотвращения отката посредством фрикционного торможения, так что может надежно исключаться избыточная зарядка.
Помимо этого, в ответ на то, что флаг flag_VEL0 определения остановки транспортного средства равен "1", остановленное состояние транспортного средства определяется при предотвращении отката транспортного средства посредством фрикционного торможения колес на основе значения TTBRK команды управления тормозным моментом для предотвращения отката (значения TPMC команды управления давлением тормозной жидкости). Затем не допускается торможение колес за счет трения на основе значения TTBRK команды управления тормозным моментом для предотвращения отката при трогании с места (значения TPMC команды управления давлением тормозной жидкости), и разрешается возврат значения (TTA) команды управления крутящим моментом электромотора от "0" к базовому значению TTMA0 целевого крутящего момента электромотора.
Следовательно, не возникает ситуации, при которой рекуперативное торможение начинается без прекращения отката транспортного средства. Таким образом, может исключаться невыгодная ситуация, когда рекуперативная мощность подается, несмотря на период ограничения зарядки.
Дополнительно, поскольку значение TTBRK команды управления тормозным моментом для предотвращения отката при трогании с места задается равным значению, эквивалентному базовому значению TTMA0 целевого крутящего момента электромотора в соответствии с открытием APO педали акселератора, изменение (увеличение или снижение) фрикционной тормозной силы колес на основе значения TTBRK команды управления тормозным моментом для предотвращения отката (значения TPMC команды управления давлением тормозной жидкости) выполняется в соответствии с открытием педали акселератора водителем. Таким образом, управление фрикционной тормозной силой предоставляется с ощущением, идентичным ощущению для управления предотвращением отката при трогании с места посредством рекуперативного торможения, так что управление предотвращением отката может быть реализовано без ощущения дискомфорта.
Помимо этого, в случае, когда предотвращение отката при трогании с места завершено с остановкой транспортного средства, уменьшение значения TTBRK команды управления тормозным моментом для предотвращения отката при трогании с места (значения TPMC команды управления давлением тормозной жидкости) (на скорости α2) и восстановление базового значения (TTMA) крутящего момента электромотора до значения TTMA0 команды управления целевым крутящим моментом электромотора (на скорости β2) выполняются с идентичной скоростью. Таким образом, как изначальное уменьшение значения TTBRK команды управления тормозным моментом для предотвращения отката при трогании с места (значения TPMC команды управления давлением тормозной жидкости), так и последующее восстановление базового значения (TTMA) крутящего момента электромотора до значения TTMA0 команды управления целевым крутящим моментом электромотора завершаются в идентичный момент времени (момент t6 времени, фиг. 11), чтобы возвращаться к нормальному управлению.
Таким образом, может исключаться такая невыгодная ситуация, когда плавное трогание с места не гарантируется вследствие разного времени завершения двух видов управления с сопутствующим чувством заедания при торможении.
Дополнительно, когда операция трогания с места активируется посредством отпускания педали акселератора во время управления для предотвращения отката транспортного средства посредством торможения за счет трения на колесах на основе значения TTBRK команды управления тормозным моментом для предотвращения отката (значения TPMC команды управления давлением тормозной жидкости), управление переходит от этапа S52 на фиг. 8 к этапу S53, на котором флаг flag_RSAON выполнения управления предотвращением отката при трогании с места задается равным "0". Таким образом, управление предотвращением отката посредством фрикционного торможения прекращается (посредством задания TTBRK равным "0"), и значение TPMC команды управления давлением тормозной жидкости, полученное на этапе SB-06 на фиг. 3, задается равным значению, идентичному базовому значению TPMC0 давления тормозной жидкости, полученному на этапе SB-04 на этом чертеже.
Следовательно, даже при нажатии педали тормоза и прекращении операции трогания с места во время управления предотвращением отката транспортного средства, поскольку значение TPMC команды управления давлением тормозной жидкости задается в соответствии с ходом BRKSTRK педали тормоза (операцией торможения водителя), нет риска появления ощущения дискомфорта, так что восстановление или возврат к нормальному управлению может выполняться без дискомфорта.
Второй вариант осуществления изобретения
Конфигурация
Фиг. 12 является временной диаграммой операции при трогании с места для управления предотвращением отката во втором варианте осуществления согласно настоящему изобретению.
В этом варианте осуществления способ уменьшения, с помощью которого уменьшается значение (TTBRK) команды управления тормозным моментом для предотвращения отката при трогании с места в момент времени, в который флаг (flag_RSAON) выполнения управления предотвращением отката изменяется с "1" на "0", выполняется так, как описано ниже со ссылкой на фиг. 12, тогда как в противном случае таким же образом, как в первом варианте осуществления.
Фиг. 12 показывает функциональную временную диаграмму в условиях, идентичных условиям на фиг. 11, и значение TTMA команды управления крутящим моментом электромотора увеличивается аналогично первому варианту осуществления от момента t5 времени, в который флаг (flag_RSAON) выполнения управления предотвращением отката переключается с "1" на "0", в направлении базового значения TTMA0 целевого крутящего момента электромотора от "0" на скорости β2 изменения (этап SV-09, фиг. 2).
Разрешается уменьшение значения (TTBRK) команды управления тормозным моментом для предотвращения отката при трогании с места на этапе SV-10 на фиг. 2 таким образом, что оно в итоге достигает "0" от значения δ (значения, идентичного базовому значению TTMA0 крутящего момента электромотора), как описано ниже.
Другими словами, момент t7 времени является опорным моментом, в который значение TTMA команды управления крутящим моментом электромотора увеличивается от "0" до целевого крутящего момента TTMA0 электромотора на скорости β2 изменения таким образом, что оно достигает значения δ, идентичного значению (TTBRK) команды управления тормозным моментом для предотвращения отката при трогании с места во время вышеописанного переключения.
До момента t7 времени значение (TTBRK) команды управления тормозным моментом для предотвращения отката при трогании с места поддерживается равным значению δ в момент t5 времени и в момент t7 времени, и после этого разрешается уменьшение значения (TTBRK) команды управления тормозным моментом для предотвращения отката от поддерживаемого значения δ до "0" (т.е. TTBRK="0") в момент t8 времени с постоянной скоростью α3 изменения, и затем управление возвращается к нормальному управлению.
Помимо этого, время для того, чтобы давать возможность значению (TTBRK) команды управления тормозным моментом для предотвращения отката возвращаться от поддерживаемого значения δ к "0", как описано выше, не обязательно должно быть моментом t7 времени со значением δ, идентичным значению TTMA команды управления крутящим моментом электромотора в момент t5 времени.
Например, может разрешаться возврат значения (TTBRK) команды управления тормозным моментом для предотвращения отката от поддерживаемого значения δ к "0" во время, когда значение TTMA команды управления крутящим моментом электромотора достигает предварительно определенного процентного отношения от вышеописанного значения δ.
Преимущества
В устройстве управления предотвращением отката во втором варианте осуществления не разрешается начало снижения значения (TTBRK) команды управления тормозным моментом для предотвращения отката сразу в момент t5 времени, в который флаг (flag_RSAON) выполнения управления предотвращением отката переключается с "1" на "0".
Вместо этого значение (TTBRK) команды управления тормозным моментом для предотвращения отката поддерживается в течение предварительно определенного времени (до момента t7 времени на фиг. 12) равным значению δ в момент t5 времени и после этого снижается до "0". Следовательно, предотвращение отката транспортного средства может выполняться надежно посредством фрикционного торможения, и наверняка исключается такой недостаток, что рекуперативная мощность подается, несмотря на период ограничения зарядки.
Другие варианты осуществления изобретения
Помимо этого, в случае проиллюстрированных вариантов осуществления приведено описание того, что транспортное средство с электроприводом, как показано на фиг. 1, представляет собой электромобиль, который оснащается только электромотором 3 в качестве источника мощности. Идентичный принцип может применяться с аналогичной идеей к гибридному транспортному средству, приводимому в движение посредством энергии как от двигателя, так и от электромотора. Само собой разумеется, что обеспечивается идентичный режим работы, а также преимущества относительно вышеописанного режима работы и преимуществ.
Реферат
Изобретение относится к транспортному средству с электроприводом. Устройство управления предотвращением отката для транспортного средства с электроприводом содержит модуль определения ограничения зарядки вращающейся электрической машины, модуль определения операции трогания с места, модуль определения отката транспортного средства и модуль управления фрикционным торможением, когда определяется откат транспортного средства при операции трогания с места, а модуль определения ограничения зарядки определяет ограничение операции зарядки. Достигается предотвращение отката транспортного средства. 7 з.п. ф-лы, 12 ил.
Формула
модуль определения ограничения зарядки, который определяет ограничение зарядки вращающейся электрической машины;
модуль определения операции трогания с места, который определяет операцию трогания с места водителем;
модуль определения отката транспортного средства, который определяет откат транспортного средства в направлении, противоположном направлению трогания с места, когда модуль определения операции трогания с места определяет операцию трогания с места; и
модуль управления фрикционным торможением, который активирует фрикционное торможение и управляет фрикционной тормозной силой для тормозной силы в соответствии с операцией трогания с места, когда модуль определения операции трогания с места и модуль определения отката транспортного средства определяют откат транспортного средства при операции трогания с места, а модуль определения ограничения зарядки определяет ограничение операции зарядки.
модуль определения остановки транспортного средства, который определяет остановленное состояние транспортного средства после того, как транспортное средство прекращает откат; и
модуль подготовки к троганию с места, который прекращает осуществление фрикционного торможения посредством модуля управления фрикционным торможением после определения состояния остановки транспортного средства посредством модуля определения остановки транспортного средства и возвращает выходной крутящий момент вращающейся электрической машины, вывод которой управляется как нулевой, к значению целевого выходного крутящего момента в соответствии с операцией трогания с места.
Комментарии