Привод штанговых токоприемников троллейбуса - RU2708147C1
Код документа: RU2708147C1
Чертежи



Описание
Изобретение относится к области транспортного машиностроения, в частности к пневмоштангоулавливающим устройствам троллейбуса.
Известен привод штанговых токоприемников троллейбуса, содержащий штанги одни концы которых шарнирно закреплены на горизонтальной оси, установленной на поворотном относительно вертикальной оси основании, размещенном на неподвижной опоре на крыше троллейбуса, а другие концы штанг снабжены головками с контактными башмаками, выполненными с возможностью взаимодействия с воздушным токопроводом, при этом каждый из штанговых токоприемников снабжен пневмоцилиндром вертикального выравнивания, закрепленным шарнирно на стойке, установленной на поворотном основании, причем шток указанного пневмоцилиндра закреплен шарнирно на штанге. Привод снабжен пневмоцилиндром горизонтального выравнивания, установленным между элементами поворота штанги и опорой, двумя предварительно растянутыми пружинами, один конец каждой из которых закреплен на основании, а другой - на штанге, датчиками положения штанги относительно токопровода, ресивером, пневмораспределителем, исполнительным механизмом и блоком управления пневмоцилиндрами (патент RU 167733, МПК В60L 5/16, опубликовано: 10.01.2017 г., бюлл. №1).
Данное техническое решение является наиболее близким к изобретению по технической сущности и достигаемому результату, поэтому принято за прототип.
Недостатками прототипа является недостаточные фиксации штанг и безопасность при сходе штанги с троллеи.
Технический результат от использования заявленного технического решения заключается в повышении надежности и безопасности при сходе штанги с троллеи путем отключения привода при критических отклонениях от режимов работы.
Ниже раскрыты все общие и частные существенные признаки технического решения, характеризующие их причинно-следственную связь с указанным техническим результатом, достаточные для осуществления изобретения специалистом в данной области техники.
Привод штанговых токоприемников содержит штанги, одни концы которых шарнирно закреплены на горизонтальной оси, установленной на поворотном относительно вертикальной оси основании, размещенном на неподвижной опоре на крыше троллейбуса. Другие концы штанг снабжены головками с контактными башмаками, выполненными с возможностью взаимодействия с воздушным токопроводом. Каждый из штанговых токоприемников снабжен пневмоцилиндром вертикального выравнивания, закрепленным шарнирно на стойке, установленной на поворотном основании. Шток указанного пневмоцилиндра закреплен шарнирно на штанге и снабжен пневмоцилиндром горизонтального выравнивания, установленным между элементами поворота штанги и опорой. Привод снабжен двумя предварительно растянутыми пружинами, один конец каждой из которых закреплен на основании, а другой - на штанге, датчиками положения штанги относительно токопровода, ресивером, пневмораспределителем, исполнительным механизмом и блоком управления пневмоцилиндрами. Шток пневмоцилиндра горизонтального выравнивания соединен с одним концом рычажного фиксатора. Другой конец фиксатора соединен со штоком пневмоцилиндра его блокировки, корпус последнего соединен с неподвижной опорой. В средней части фиксатора выполнен выступ, сопряженный в выдвинутом положении штока с соответствующей ему по форме выемкой, образованной в стопорной пластине, прикрепленной к основанию. Привод снабжен двумя пневмозахватами штанговых токоприемников, симметрично разнесенных относительно оси троллейбуса. Каждый пневмозахват состоит из рамы, установленной на крыше троллейбуса; крюка, нижний конец которого шарнирно закреплен на раме и соединен со штоком установленного на раме пневмоцилиндра, корпус которого шарнирно прикреплен посредством оси к раме, на которой закреплен стержневой релинг с одной наклонной стороной в виде направляющей для штанги, причем верхний, свободный конец крюка выполнен с загибом по дуге окружности, при этом между наклонной стороной стержневого релинга и торцем свободного конца крюка предусмотрен зазор не меньший диаметра штанги с возможностью ее свободного прохождения через него и удержания в крюке при закрытом положении пневмозахвата посредством удлинения полукольца захватной части крюка стержневой надставкой, при этом ось крюка и ось пневмоцилиндра расположены в одной вертикальной плоскости, а крюки расположены на расстоянии, обеспечивающем свободное одновременное перемещение штанг в пространстве между крюками. Указанный релинг каждого пневмозахвата может быть закреплен вдоль его продольной оси или расположены со стороны передней или задней относительно оси троллейбуса части соответствующего корпуса. Релинг одного пневмозахвата может быть расположен со стороны передней части, а релинг другого пневмозахвата - со стороны задней части соответствующего пневмозахвата относительно оси троллейбуса. Стержневой релинг пневмозахвата может быть ориентирован наклонной стороной к прилежащему к нему крюку или ориентирован наклонной стороной в направлении от крюка. Крюки пневмозахватов штанговых токоприемников могут быть ориентированы друг к другу или в противоположные стороны. Указанный выступ может быть образован роликом, установленным на оси, расположенной на фиксаторе.
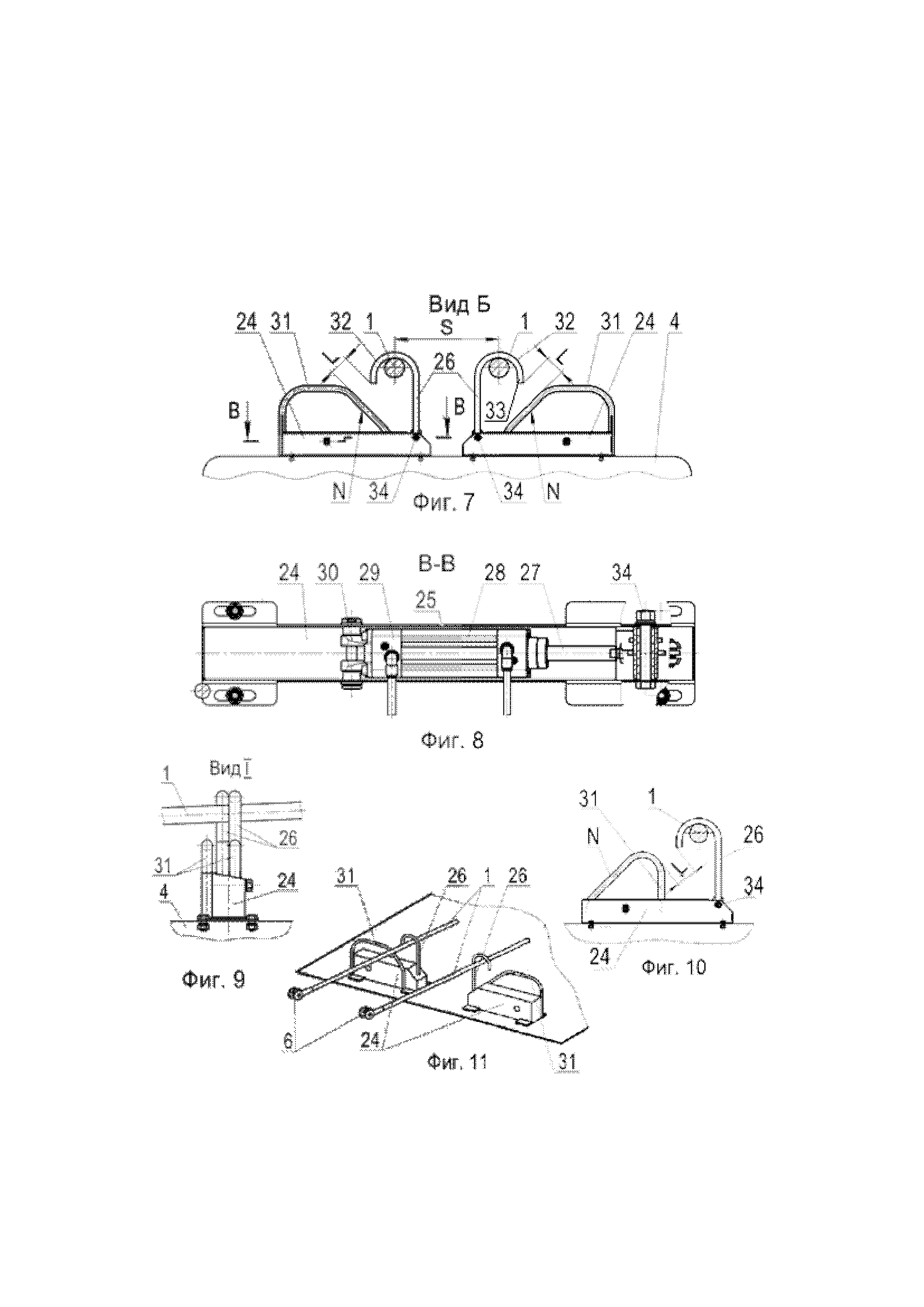
Устройство иллюстрируется чертежами, где: на фиг. 1 - привод штанговых токоприемников на троллейбусе, вид сбоку; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - привод штанговых токоприемников вид сбоку; на фиг.4 - то же, что и на фиг. 3, вид сверху; на фиг. 5 - вид на узел крепления штанг к крыше троллейбуса, изометрия; на фиг. 6 - кинематическая схема привода штанговых токоприемников; на фиг. 7 - вид Б на фиг. 3, монтаж устройства на крыше троллейбуса; на фиг. 8 - разрез В-В на фиг. 7; на фиг. 9 - вид I на фиг. 3; на фиг. 10 - вариант выполнения пневмозахвата; на фиг. 11 - вариант расположения пневмозахватов, изометрия.
Привод штанговых токоприемников содержит штанги 1, одни концы которых шарнирно закреплены на горизонтальной оси, установленной на поворотном относительно вертикальной оси основании 2, размещенном на неподвижной опоре 3 на крыше 4 троллейбуса 5.
Другие концы штанг 1 снабжены головками 6 с контактными башмаками, выполненными с возможностью взаимодействия с воздушным токопроводом 7 (троллеями).
Каждый из штанговых токоприемников снабжен пневмоцилиндром вертикального выравнивания 8, закрепленным шарнирно на стойке 9, установленной на поворотном основании 2.
Шток 10 указанного пневмоцилиндра закреплен шарнирно на штанге 1 и снабжен пневмоцилиндром горизонтального выравнивания 11, установленным между элементами поворота штанги и опорой 3.
Привод снабжен: двумя предварительно растянутыми пружинами 12, один конец каждой из которых закреплен на основании 2, а другой - на штанге 1; датчиками положения 13 (фиг. 6) штанги 1 относительно токопровода 7; ресивером 14; электропневмораспределителем 15; исполнительным механизмом 16 и блоком управления 17 пневмоцилиндрами.
Шток 18 пневмоцилиндра горизонтального выравнивания 11 соединен с одним концом рычажного фиксатора 19.
Другой конец фиксатора 19 соединен со штоком пневмоцилиндра 20 его блокировки, корпус последнего соединен с неподвижной опорой 3.
В средней части фиксатора 19 выполнен выступ 21, сопряженный в выдвинутом положении штока с соответствующей ему по форме выемкой 22, образованной в стопорной пластине 23, прикрепленной к основанию 2.
Привод снабжен двумя пневмозахватами 24 штанговых токоприемников, симметрично разнесенных относительно оси троллейбуса 5.
Каждый пневмозахват 24 состоит из рамы 25, установленной на крыше 4 троллейбуса 5; крюка 26 нижний конец которого шарнирно закреплен на раме 25 и соединен со штоком 27 вмонтированного в раму 25 пневмоцилиндра 28, корпус 29 которого шарнирно прикреплен посредством оси 30 к раме 25.
На одной из сторон рамы 25 закреплен стержневой релинг 31 с одной наклонной стороной ввиде направляющей N для штанги, причем верхний, свободный конец 32 крюка 26 выполнен с загибом по дуге окружности.
Между наклонной стороной N стержневого релинга 31 и торцем свободного конца 32 крюка 26 предусмотрен зазор L, не меньший диаметра штанги 1 с возможностью ее свободного прохождения через него и удержания в крюке 26 при закрытом положении пневмозахвата 24 посредством удлинения полукольца захватной части 32 крюка 26 стержневой надставкой 33.
При этом ось 34 крюка 26 и ось пневмоцилиндра 28 расположены в одной вертикальной плоскости, а крюки 26 расположены на расстоянии S, обеспечивающем свободное одновременное перемещение штанг 1 в пространстве между ними.
Стержневой релинг 31 одного пневмозахвата 24 может быть расположен со стороны передней части, а стержневой релинг 31 другого пневмозахвата 24 при этом может быть расположен со стороны задней части соответствующего пневмозахвата 24 относительно оси троллейбуса 5 или могут быть расположены с одной стороны обоих пневмозахватов 24.
Стержневой релинг 31 пневмозахвата 24 может быть ориентирован наклонной стороной L к прилежащему к нему крюку 26 (фиг. 7) или может быть ориентирован наклонной стороной L в направлении от крюка 26.
Крюки 26 пневмозахватов 24 штанговых токоприемников могут быть ориентированы друг к другу или ориентированы в стороны от оси троллейбуса 5.
Указанный выступ 21 может быть образован роликом, установленным на оси, расположенной на фиксаторе 19.
Штанги 1 снабжены гибкими тягами 35 для их ручного перемещения.
Сравнение заявленного технического решения с уровнем техники, известным из научно-технической и патентной документации на дату приоритета, в основной и смежной рубриках не выявило средство, которому присущи признаки, идентичные всем признакам, содержащимся в предложенной заявителем формуле изобретения, включая характеристику назначения. Т.е., совокупность существенных признаков заявленного решения ранее не была известна и не тождественна каким-либо известным техническим решениям, следовательно, оно соответствует условию патентоспособности "новизна".
Данное техническое решение промышленно применимо, поскольку в описании к заявке и названии полезной модели указано ее назначение, она может быть изготовлена промышленным способом и использована для использования в приводах штанговых токоприемников троллейбусов.
Техническое решение работоспособно, осуществимо и воспроизводимо, а отличительные признаки устройства позволяют получить заданный технический результат, т.е. являются существенными.
Изобретение в том виде, как оно охарактеризовано в каждом из пунктов формулы, может быть осуществлено с помощью средств и методов, описанных в прототипе - патенте RU 167733, ставшим общедоступным до даты приоритета изобретения.
Следовательно, заявленное техническое решение соответствует условию патентоспособности "промышленная применимость".
Анализ известных технических решений в данной области техники показал, что предложенное техническое решение не следует для специалиста явным образом из уровня техники, поскольку не выявлены решения, имеющие признаки, совпадающие с его отличительными признаками, а в выявленных таких решениях не подтверждена известность влияния отличительных признаков на указанный в материалах заявки технический результат.
Т.е. заявленное решение имеет признаки, которые отсутствуют в известных технических решениях, а использование этих признаков в заявленной совокупности существенных признаков дает возможность получить новый технический результат - повышение надежности и безопасности при сходе штанги с троллеи.
Следовательно, предложенное техническое решение может быть получено только путем творческого подхода и неочевидно для среднего специалиста в этой области, т.е. имеет изобретательский уровень по сравнению с существующим уровнем техники.
Осуществление заявленного изобретения достигается реализацией указанного назначения.
Пневмозахваты 24 штанговых токоприемников троллейбуса 5 могут быть расположены в поперечной вертикальной плоскости его сечения посредством поворота одного из них на 180° относительно другого. В этом случае используются пневмозахваты 24 одинаковой конструкции.
Пневмозахваты 24 штанговых токоприемников троллейбуса 5 могут быть установлены в виде зеркально отраженных их изображений относительно поперечной вертикальной плоскости троллейбуса 5 и со взаимным смещением вдоль его оси. В этом случае левый и правый пневмозахваты отличаются расположением стержневого релинга 31.
Крюки 26 пневмозахватов штанговых токоприемников могут быть ориентированы друг к другу или ориентированы в стороны от оси троллейбуса.
Привод штанговых токоприемников троллейбуса имеет три режима работы:
- Аварийное складывание штанг в случае схода любого из токоприемников с троллеи 7 (основной режим работы);
- Опускание штанг 1 по команде блока управления 17;
- Поднятие штанг 1 по команде блока управления 17.
Режим аварийного складывания штанг 1 в случае схода любого из токоприемников с троллеи 7.
Исходное состояние: троллейбус 5 движется по маршруту, получая электропитание с троллей 7 через контактные головки 6 на штангах 1.
При этом на двух штангах полости цилиндров 8 и 11 обезвоздушены.
Цилиндр фиксатора 19 втянут (сжатый воздух подается в штоковую полость), тем самым, выступ 21 фиксатора 19 не попадает в выемку 22 в пластине 23.
Шток 27 пневмоцилиндра захвата 28 выдвинут (сжатый воздух подается в поршневую полость), тем самым, захват штанги токоприемника закрыт.
Такое состояние цилиндров позволяет штанге 1 троллейбуса 5 свободно перемещаться как вертикально, так и горизонтально, обеспечивая скольжение контактной головки 6 по троллее 7.
Аварийное складывание происходит независимо при сходе контактной головки 6 правой или левой (или обоих одновременно) контактной головки 6 с троллеи 7.
Система управления при этом работает параллельно с двумя штангами 1. Условием аварийного складывания является два события, происходящих одновременно:
- превышение допустимого ускорения подъема штанги 1;
- отсутствие напряжения питания с троллей 7.
Появление этих условий непрерывно отслеживается блоком управления 17 с помощью датчика положения 13 пневмоцилиндра вертикального перемещения 8 (ускорение) и сигнала высокого напряжения с троллей 7.
При аварийном складывании штанг 1 происходят последовательно следующие действия:
- штанги 1 быстро опускаются на 700-1000 мм ниже уровня точки схода с троллеи. Для этого в бесштоковую полость цилиндра 8 подается сжатый воздух. Скорость опускания и величина перемещения отслеживается с помощью датчика положения 13.
Для регулирования скорости опускания блок управления 17 регулирует время открытия-закрытия пневмораспределителя 15, подающего сжатый воздух в бесштоковую полость цилиндра 8 (широтно-импульсное управление скоростью);
- штанги 1 располагаются вдоль продольной оси троллейбуса.
Для этого в штоковую полость цилиндра 11 подается сжатый воздух. Втягиваясь, цилиндр 11 поворачивает штангу 1 вокруг вертикальной оси (штанга двигается параллельно горизонту) и устанавливается строго вдоль продольной оси троллейбуса 5.
О том, что штанга 1 установилась вдоль оси блоку управления 17 сообщает датчик положения 13.
Скорость втягивания также контролируется блоком управления 17 с помощью датчика положения 13.
Для регулирования скорости блок управления 17 регулирует время открытия-закрытия электропневмораспределителя 15, подающего сжатый воздух в бесштоковую и штоковую полости цилиндра 11 (широтно-импульсное управление скоростью).
Подача давления в штоковую полость необходима для случая перелета штанги 1 через продольную ось вследствие инерции.
В зависимости от поставки возможно не широтно-импульсное управление скоростью, а управление расходом поступающего воздуха с помощью механически настраиваемого дросселя;
- пневмоцилиндр 28 втягивается (сжатый воздух подается в штоковую полость), и захват штанги открывается;
- пневмоцилиндр 20 выдвигается (сжатый воздух подается в бесштоковую полость), выступ 21 фиксатора 19 попадает в выемку 22 и штанга 1 фиксируется в горизонтальной плоскости;
- штанги 1 медленно опускаются в пневмозахват 24. Для этого в бесштоковую полость цилиндра 8 подается сжатый воздух. Скорость опускания и величина перемещения отслеживается с помощью датчика положения 13.
Для регулирования скорости опускания блок управления 17 регулирует время открытия-закрытия электропневмораспределителя 15, подающего сжатый воздух в бесштоковую полость цилиндра 8 (широтно-импульсное управление скоростью);
- пневмоцилиндр 28 выдвигается (сжатый воздух подается в бесштоковую полость), и захват штанги закрывается;
- полости пневмоцилиндров 8 и 11 обезвоздушиваются, и штанга под действием пружин 12 приподнимается под крюк 26 пневмозахвата 24;
- пневмоцилиндр 20 втягивается (сжатый воздух подается в штоковую полость), выступ 21 фиксатора 19 выходит из выемки 22 пластины 23 и штанга 1 больше не фиксируется в горизонтальной плоскости;
Блок управления 17 отслеживает предельное время каждого действия и в случае его превышения останавливает процесс складывания, выдавая сигнал аварии на пульт водителю.
Режим опускания штанг по команде с пульта управления.
Исходное состояние:
- троллейбус 5 движется по маршруту, получая электропитание с троллей через контактные головки 6 на штангах 1.
- троллейбус 5 стоит на месте и штанги 1 подняты и контактные головки 6 контактируют или не контактируют с троллеями 7.
При этом на двух штангах 1 полости цилиндров 8 и 11 обезвоздушены. Пневмоцилиндр 20 фиксатора 19 втянут (сжатый воздух подается в штоковую полость), тем самым, выступ 21 фиксатора 19 не попадает в выемку 22 пластины 23. Шток 27 пневмоцилиндра 28 захвата 24 выдвинут (сжатый воздух подается в бесштоковую полость), тем самым, захват штанги токоприемника 1 закрыт.
При нажатии водителем кнопки опускания штанг 1 блоком управления 17 осуществляются следующие действия:
- штанги 1 быстро опускаются на 700-1000 мм ниже уровня точки схода с троллеи. Для этого в бесштоковую полость цилиндра 8 подается сжатый воздух. Скорость опускания и величина перемещения отслеживается с помощью датчика положения 13. Для регулирования скорости опускания блок управления 17 регулирует время открытия-закрытия электропневмораспределителя 15, подающего сжатый воздух в бесштоковую полость цилиндра 8 (широтно-импульсное управление скоростью);
- штанги 1 располагаются строго вдоль продольной оси троллейбуса 5. Для этого в штоковую полость пневмоцилиндра 11 подается сжатый воздух. Втягиваясь, пневмоцилиндр поворачивает штангу 1 вокруг вертикальной оси (штанга двигается параллельно горизонту) и устанавливается строго вдоль продольной оси троллейбуса 5.
О том, что штанга 1 встала вдоль оси блоку управления 17 сообщает датчик положения 13. Скорость втягивания также контролируется блоком управления 17 с помощью датчика положения 13.
Для регулирования скорости блок управления 17 регулирует время открытия-закрытия электропневмораспределителя 15, подающего сжатый воздух в бесштоковую и штоковую полость цилиндра 11 (широтно-импульсное управление скоростью). Подача давления в штоковую полость необходима для случая перелета штанги через продольную ось вследствие инерции. В зависимости от поставки возможно широтно-импульсное управление скоростью, а управление расходом поступающего воздуха с помощью механически настраиваемого дросселя;
- пневмоцилиндр 28 втягивается (сжатый воздух подается в штоковую полость), и пневмозахват 24 штанги 1 открывается;
- пневмоцилиндр 20 выдвигается (сжатый воздух подается в бесштоковую полость), выступ 21 фиксатора 19 попадает в выемку 22 пластины 23 и штанга 1 фиксируется в горизонтальной плоскости;
- штанги 1 медленно опускаются в пневмозахват 24. Для этого в бесштоковую полость цилиндра 8 подается сжатый воздух. Скорость опускания и величина перемещения отслеживается с помощью датчика положения 13. Для регулирования скорости опускания блок управления 17 регулирует время открытия-закрытия электропневмораспределителя 15, подающего сжатый воздух в бесштоковую полость цилиндра 8 (широтно-импульсное управление скоростью);
- пневмоцилиндр 28 выдвигается (сжатый воздух подается в бесштоковую полость), и пневмозахват 24 штанги 1 закрывается;
- пневмоцилиндр 20 втягивается (сжатый воздух подается в штоковую полость), выступ 21 фиксатора 19 выходит из выемкии штанга больше не фиксируется в горизонтальной плоскости;
- полости цилиндров 8 и 11 обезвоздушиваются, и штанга под действием пружин 12 приподнимается под крюк 26 пневмозахвата 24;
Блок управления 17 отслеживает предельное время каждого действия и в случае его превышения останавливает процесс складывания, выдавая сигнал аварии на пульт водителю.
Режим поднятия штанг 1 по команде с блока управления 17.
Исходное состояние троллейбус 5 стоит на месте, штанги 1 опущены и заведены под крюки 26 пневмозахвата 24.
При этом на двух штангах 1 полости цилиндров 8 и 11 обезвоздушены. Пневмоцилиндр фиксатора 20 втянут (сжатый воздух подается в штоковую полость), тем самым, выступ 21 фиксатора 19 не попадает в выемку 22 пластины 23. Шток 27 пневмоцилиндра захвата 28 выдвинут (сжатый воздух подается в бесштоковую полость), тем самым, пневмозахват 24 штанги 1 токоприемника закрыт.
При нажатии водителем кнопки поднятия штанг с блока управления 17 осуществляются следующие действия:
- штанги медленно опускаются на 200-300 мм в захвате штанги 1. Для этого в бесштоковую полость цилиндра 8 подается сжатый воздух. Скорость опускания и величина перемещения отслеживается с помощью датчика положения 13. Для управления скоростью опускания блок управления 17 регулирует время открытия-закрытия электропневмораспределителя 15, подающего сжатый воздух в бесштоковую полость цилиндра 8 (широтно-импульсное управление скоростью);
- пневмоцилиндр 28 втягивается (сжатый воздух подается в штоковую полость), и пневмозахват 24 штанги 1 открывается;
- штанги 1 медленно поднимаются на полную высоту (или до момента касания головки штанги 6 с троллей 7). Для этого из бесштоковой полости цилиндра 8 выпускается сжатый воздух.
Скорость подъема регулируется расходом стравливаемого воздуха с помощью механически настраиваемого дросселя. Окончание подъема блоком управления 17 по датчику положения 13;
- пневмоцилиндр 28 выдвигается (сжатый воздух подается в бесштоковую полость), и захват штанги закрывается;
- полость пневмоцилиндра 8 обезвоздушивается.
Система управления отслеживает предельное время каждого действия и в случае его превышения останавливает процесс складывания, выдавая сигнал аварии на пульт водителю.
Пневмозахват 24 токопод водящих штанг собирается отдельно и монтируется на крышу 4 троллейбуса, исходное рабочее состояние - закрытое.
Устройство обеспечивает аварийное, автоматическое опускание токоприемников, в случае их схода одного или обоих с контактной сети.
Допускается штатное складывание штанг 1 при движении троллейбуса 5 со скоростью до 60 км/ч на ровном дорожном покрытии, при этом высота подвеса троллеи не должна быть менее 4,5 м от уровня дорожного полотна.
В процессе штатного опускания штанг 1 снижение скорости движения троллейбуса 5 не требуется.
Использование изобретения позволяет повысить надежность и безопасность при сходе штанги с троллеи путем отключения привода при критических отклонений от режимов работы.
Реферат
Изобретение относится к токоприемникам транспортных средств. Привод штанговых токоприемников троллейбуса содержит штанги, концы которых шарнирно закреплены на поворотном относительно вертикальной оси основании, размещенном на неподвижной опоре на крыше троллейбуса. При этом каждый из штанговых токоприемников снабжен пневмоцилиндром вертикального выравнивания. Привод снабжен пневмоцилиндром горизонтального выравнивания, двумя предварительно растянутыми пружинами, датчиками положения штанги относительно токопровода, ресивером, электропневмораспределителем, исполнительным механизмом и блоком управления пневмоцилиндрами. При этом шток пневмоцилиндра горизонтального выравнивания соединен с одним концом рычажного фиксатора, другой конец которого соединен со штоком пневмоцилиндра его блокировки. В средней части фиксатора выполнен выступ, сопряженный в выдвинутом положении штока с соответствующей ему по форме выемкой, образованной в стопорной пластине, прикрепленной к основанию. При этом привод снабжен двумя пневмозахватами штанговых токоприемников, которые состоят из рамы, крюка, пневмоцилиндра и стержневого релинга. Технический результат заключается в повышении надёжности и безопасности при сходе штанги с провода. 8 з.п. ф-лы, 11 ил.
Формула
Документы, цитированные в отчёте о поиске
Пневматический привод штанги троллейбуса
Комментарии