Система автоматического подсоединения и отсоединения во время движения транспортного средства с питанием от воздушной контактной сети - RU2561643C2
Код документа: RU2561643C2
Чертежи

Описание
Изобретение представляет собой систему, состоящую из цифровых камер, приводов, воздействующих на штанговый токоприемник, и электронного управления данной системы, которая позволяет транспортным средствам с питанием от воздушной контактной сети при необходимости автоматически во время движения подсоединять и отсоединять штанговый токоприемник, используя соответствующий способ, в частности со стерео-оптическим распознанием образов и динамичного сопровождения цели.
Электрические транспортные средства имеют ряд преимуществ по сравнению с теми, которые получают первичную энергию от двигателя внутреннего сгорания. Так как с помощью топливного элемента до сих пор не представляется возможным обеспечить достаточно эффективное аккумулирование или согласно распространенному мнению чистое производство тока, то электроснабжение посредством воздушной контактной сети или посредством других электрических сетей или соответственно контактных рельсов является важным альтернативным решением. Методы, уже более ста лет известные для рельсовых транспортных средств, таких как поезда и трамваи, имеют достаточную практическую ценность и широко распространены. Однако известные способы для безрельсовых транспортных средств, в частности троллейбусов, обладают большими ограничениями, так что во многих городах даже осуществляют демонтаж существующих систем и заменяют их дизельными автобусами. Самым значительным ограничением известных для троллейбусов способов является их недостаточная гибкость, то есть отсутствующая или за счет больших затрат достигаемая возможность кратковременной эксплуатации троллейбусов без воздушной контактной сети.
Электробусы, обозначаемые также троллейбусами, в основном снабжаются энергией через двухполюсную электрическую систему в виде воздушных контактных сетей. Провода обычно проведены на определенной высоте и, как правило, по середине над предусмотренной полосой движения. При этом провода в зависимости от вида подвески проходят фактически даже не параллельно друг к другу, то есть расстояние между проводами, составляющее обычно 60 см, может отклоняться в диапазоне 10 см и более. Также предусматриваются большие допуски по высоте, составляющей от 5 до 6 м. Еще больший допуск наблюдается при смещении к центру полосы движения, которая может составлять до 4,5 м при длине штанг 6,2 м. Все эти факторы препятствуют автоматическому подсоединению, являющемуся необходимым условием для ряда сфер применения, которые смогли бы способствовать желаемому и в принципе с помощью троллейбуса достижимому развитию электромобильности, в частности во внутригородском сообщении.
Токоприемники обычно выполнены в виде U-образных контактных башмаков и расположены на конце обоих штанговых токоприемников с возможностью вращения соответственно вокруг вертикальной и горизонтальной оси. Контактные башмаки прижимаются штангами к воздушным контактным сетям под действием силы, направленной вертикально вверх, так что в фазе подсоединения к контактной сети обеспечивается постоянный электрический контакт.
Известные системы предназначены для того, чтобы токоприемники были постоянно подсоединены к контактной сети во время всего пути следования или соответственно были отсоединены или по меньшей мере подсоединены к контактной сети во время остановки. Так как электрическая сеть для постоянного элетроснабжения во время всего пути следования не только связана с большими затратами на монтаж и на техническое обслуживание, в частности в случае воздушных стрелок, двупроводных или многопроводных линий на участках с двухполосным или многополосным движением, но имеет и другие недостатки, такие как, например, ограничения, связанные с эстетическим видом, в частности в исторических центрах городов или на подобных территориях, то представляется желательным эксплуатировать транспортные средства на более или менее коротких участках пути беспроводным образом.
Для этого с одной стороны в транспортном средстве необходим дополнительный автономный источник энергии, например батареи, конденсаторы, двигатель внутреннего сгорания с генератором, топливный элемент или маховик, с другой стороны, необходима система токоприемников, которая способна автоматически, быстро и надежно отсоединяться или, в частности, подсоединяться к электрической линии. Известны различные модификации, задачей которых является усовершенствование источника электроэнергии в транспортном средстве, как, например, двухсистемное транспортное средство с дизель-генератором или раскрываемый в DE 30 15 754 C супермаховик, с помощью которого возможно вырабатывать ток для автономного режима эксплуатации.
Так же предлагаются технические решения для автоматизированного подсоединения к контактной сети, то есть управляемого подведения токосъемников к электрическим линиям: B DE 24 60 843 раскрыта установка сбоку на контактные башмаки соответственно по одному вертикальному вспомогательному элементу («флажку»), расположенному параллельно направлению движения, который должен облегчать введение в зацепление, а после достижения контакта откидываться вниз. Недостатки этой системы состоят, во-первых, в том, что автоматическое подсоединение с помощью этого устройства возможно лишь во время останова, так как флажок в открытом виде вдается внутрь участка контактной подвески, а во-вторых, в том, что подсоединение к контактному проводу до сих пор проводится вручную.
B FR 2 506 234 осуществляется попытка автоматизации этого процесса и при этом сокращают расходы на измерение и регулировку за счет того, что оба башмака токоприемника монтированы на одном совместном носителе. Использование данного решения невозможно уже в силу того, что контактные провода, как это было упомянуто в начале, в принципе никогда не находятся на точно определенном расстоянии друг от друга.
B DE 100 54 766, хотя и предлагается решение проблемы ненадежного параллельного монтажа обоих контактных проводов, а также сокращение расходов на регулировку подсоединения контактных башмаков к воздушной контактной сети, однако не решается ситуация, когда воздушная контактная сеть находится не точно по середине или соответственно в узком коридоре над транспортным средством, и для ситуации, когда воздушная контактная сеть начинается или кончается во время движения.
Сходное по тематике изобретение, известное из DE 100 12 039 C, кроме того, имеет дополнительный недостаток, заключающийся в том, что предусматривается использование совсем новой и более затратной технологии и конфигурации монтажа контактных проводов и контактной подвески.
Все описанные приводные системы сходны в том, что предполагается, что положение штанги токоприемника как относительно транспортного средства, так и относительно контактного провода может быть зарегистрировано и использовано в управлении перемещениями, однако для этого не предоставляют никаких конкретных предложений.
Как следствие, ни одна из этих систем не была использована на практике, так как либо по всей длине трассы предусматривается непрерывная воздушная контактная сеть, либо транспортные средства двигаются на определенных участках пути лишь за счет электроэнергии, как, например, в туннелях, а на других участках на дизельном топливе, контактные башмаки либо вручную, либо в лучшем случае полуавтоматически вводятся в зацепление со стационарными устройствами, обозначаемыми "ловушками". Конструкции, посредством которых электрифицируют с самого начала лишь несколько метров участка пути и обходят перекрестки, подземные переходы, повороты налево, наклонные участки пути и подобное, и поэтому зависят от надежной и прежде всего быстрой повторной даже во время движения установки токоприемников, не описаны ни в литературе, ни используются на практике.
Таким образом, задачей изобретения является предложить систему токоприемников вместе с использованными для этого способами, позволяющую осуществлять автоматическое отсоединение и подсоединение штанговых токоприемников транспортного средства во время движения.
Задача изобретения решается с помощью устройства и способа, охарактеризованных в независимых пунктах формулы изобретения.
Сущность изобретения состоит в том, что с помощью регистрации, обработки и анализа изображений можно обеспечить автоматическое подсоединение или соответственно отсоединение штанговых токоприемников от воздушной контактной сети.
Согласно изобретению заявляется автоматическое подсоединение и отсоединение по меньшей мере одного штангового токоприемника транспортного средства, предусмотренного для эксплуатации с питанием от воздушной контактной сети, с по меньшей мере одним приводом, перемещающим штанговый токоприемник, и по меньшей мере одним блоком регистрации и анализа изображений, управляющим приводом таким образом, что штанговый ток о приемник подсоединяется и отсоединяется от воздушной контактной сети. Преимуществом изобретения является надежное и безопасное автоматическое подсоединение и отсоединение токоприемников транспортного средства от воздушной контактной сети.
Также в изобретении заявляется способ автоматического подсоединения и отсоединения по меньшей мере одного штангового токоприемника транспортного средства, предусмотренного для эксплуатации с питанием от воздушной контактной сети, с регистрацией изображения штангового токоприемника и воздушной контактной сети, с анализом изображения для определения позиции штангового токоприемника и воздушной контактной сети и с системой управления привода, соединенного со штанговым токоприемником, на основании анализа изображения таким образом, что штанговый токоприемник автоматически подсоединяется или отсоединяется от воздушной контактной сети.
Предпочтительны транспортные средства, оборудованные двумя штанговыми токоприемниками, присоединяющиеся или соответственно отсоединяющиеся от воздушной контактной сети. Каждый штанговый токоприемник находится в оперативной связи с по меньшей мере одним приводом. Понятия "воздушная контактная сеть" и "контактный провод" идентичны.
Задача также решается посредством системы, состоящей из стерео-оптических видеокамер, приводов для перемещения штанговых токоприемников или соответственно контактных башмаков и интеллектуальной управляющей электроники, которая с помощью оптического распознавания образов на основе данных, полученных с видеокамеры, определяет позицию контактных проводов относительно транспортного средства, так же как и позиции контактных башмаков или токосъемных головок, и на основе расчетов и связи с другими системами выдает команды для моторного или соответственно гидравлического или пневматического позиционирования штанговых токоприемников для осуществления перемещений, необходимых для подсоединения или отсоединения от контактной сети.
Упомянутая управляющая электроника осуществляет как верхний командный уровень, который решает, следует ли осуществлять подсоединения или отсоединения от контактной сети, так и нижний уровень, который контролирует движения штангового токоприемника или соответственно контактного башмака. Оба уровня используют информацию, полученную с камер, то есть динамические изображения, и при необходимости от других датчиков, с помощью которых можно определить относительные позиции контактных башмаков и воздушных контактных сетей, а также видимое окружение, в частности препятствия между контактным башмаком и воздушной контактной сетью. Верхний уровень к тому же может использовать доступ к глобальной навигационной спутниковой системе для определения географической позиции транспортного средства, сравниваемой с картой, на которой зарегистрированы зоны с воздушной контактной сетью и без воздушной контактной сети или соответственно зоны обрыва воздушной контактной сети. Кроме того, верхний уровень может использовать так называемую связь между двумя транспортными средствами на основе цифровой радиосвязи с транспортным средством, оборудованным подобной технологией, чтобы в случае конфликта ресурсов (в отношении одной и той же воздушной контактной сети) согласовывать, какое из задействованных транспортных средств должно (на короткое время) отсоединиться от контактной сети.
При этом в целях ресурсосбережения, то есть оптимизации энергопотребления и износа, верхний уровень может на основе статистических (полученных в результате прежней эксплуатации) или других данных, в частности профиля участков подъема и наклонных участков пути, сохраненного на карте, отдавать нижнему уровню команды на осуществление подсоединения и отсоединения.
Далее изобретение более детально описывается на примере осуществления с помощью чертежей, на которых показано:
Фиг. 1 - соответствующие механические компоненты транспортного средства на примере троллейбуса, на виде сбоку.
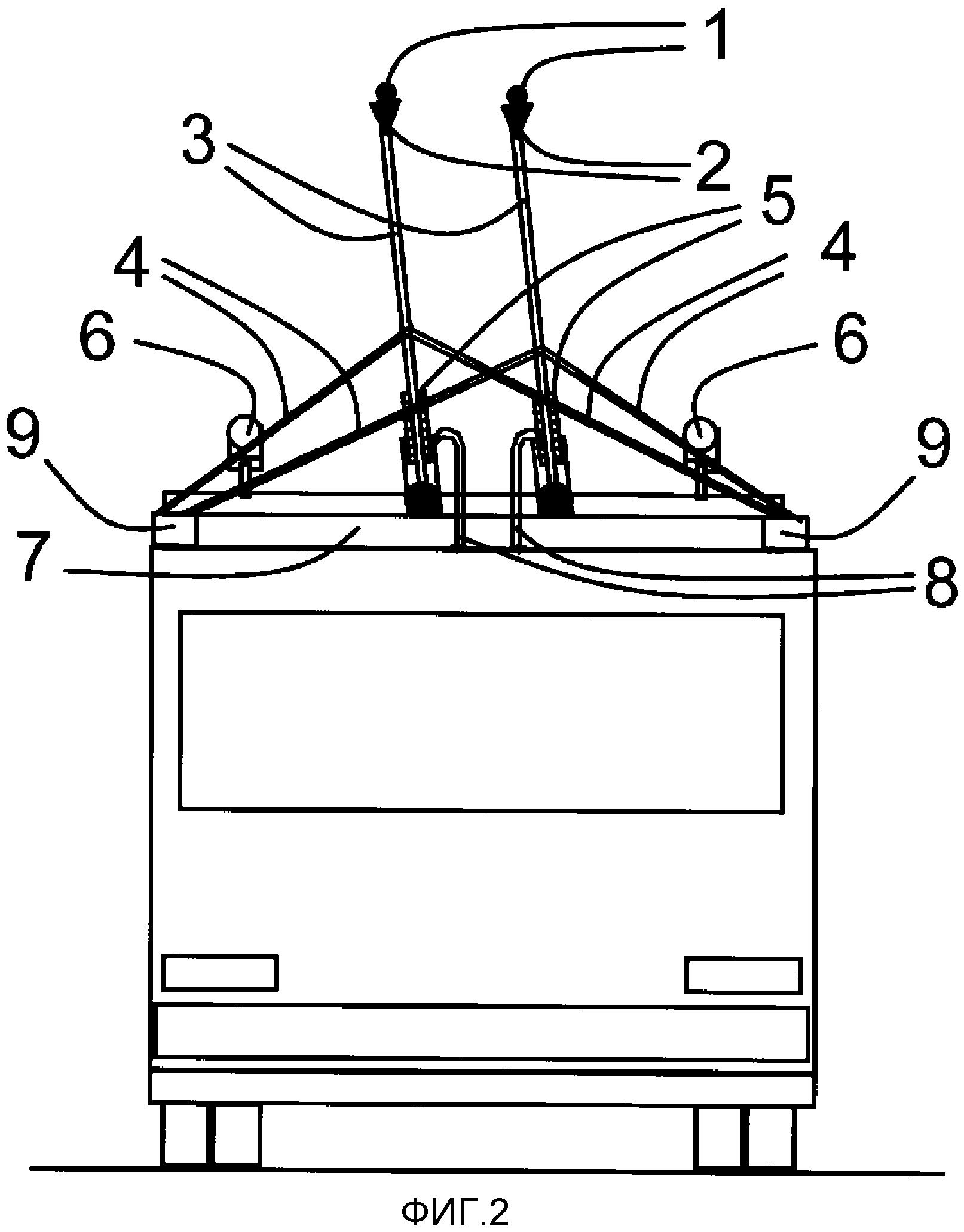
Фиг. 2 - то же самое, на виде сзади.
Фиг. 3 - способ определения позиции воздушной контактной сети.
На всех фиг. показано применение изобретения в виде троллейбуса, у которого активное перемещение штанговых токоприемников (3) происходит с помощью моторов (9) для тросов штангоуловителей и натянутых тросов (4) штангоуловителей под действием силы, произведенной нажимными пружинами (5). Стерео-оптические видеокамеры (6) установлены на крыше троллейбуса и передают видеоданные в электронику управления, также размещенную на крыше в наружном электрооборудовании (7), которая в свою очередь передает управляющие команды на приводы, то есть в данном примере осуществления моторы для тросов штангоуловителей.
При этом электроника управления использует нижеописанные способы согласно изобретению для позиционирования штанговых токоприемников вместе с контактными башмаками (2) как можно ближе к имеющейся в данных условиях в распоряжении воздушной контактной сети (1) для осуществления электрического контакта. Наоборот, в зонах, в которых согласно режиму эксплуатации, рассчитанному электроникой управления, непредпочтительно или опасно ехать в режиме подсоединения к контактной сети или соответственно в которых отсутствует воздушная контактная сеть, доступная для штанговых токоприемников, передаются соответствующие управляющие команды на отсоединение от контактной сети и закрепления в устройстве (8) фиксации.
При этом в видеоизображениях с упомянутых камер методами распознаваний образов осуществляют идентификацию позиций обоих контактных проводов, как двух по существу прямых линий в двухмерном изображении, соответствующих «левому» и «правому» контактному проводу. Обе линии методом обратной проекции в трехмерном пространстве задают соответственно по одной плоскости (10) относительно транспортного средства. Так как в трехмерном пространстве левые и правые плоскости обоих изображений с обоих камер пересекаются, а именно соответственно левые друг с другом, а правые - друг с другом, то получают правую и левую линию (11) в трехмерном пространстве, все еще относительно позиции транспортного средства. С целью подсоединения оба токоприемника следует позиционировать относительно этих линий. Для этого аналогичным образом стерео-оптическим методом в пространстве определяется также позиция контактных башмаков относительно штанговых токоприемников, методом вычисления определяются соответствующие повороты в пространстве, согласно которым башмаки контактируют с контактными проводами, и механические элементы штанг регулируются таким образом, что контактные башмаки приближаются на вычисленных поворотах к контактным проводам. Так как все это проходит во время движения, то есть, в частности, положение контактных проводов относительно транспортного средства постоянно изменяется, то фактические и заданные позиции и выводимые на их основе управляющие команды необходимо постоянно пересчитывать.
Способ отсоединения от контактной сети аналогичен, только в этом случае позиция контактных проводов в зависимости от применения больше не имеет значения.
Кроме того, система управления как в состоянии подсоединения, так и в состоянии отсоединения от контактной сети осуществляет постоянный контроль контактных проводов с целью ответа на следующие вопросы:
Выходят ли контактные провода из коридора, который доступен контактным башмакам, относительно транспортного средства, то есть покидает ли транспортное средство полосу?
Или соответственно контактные провода возвращаются в этот коридор?
Заканчиваются ли контактные провода?
Или соответственно они начинаются снова?
Находится ли под контактными проводами препятствие, в частности, например, контактные башмаки другого транспортного средства, причем одновременно определяется направление и скорость движения препятствия относительно транспортного средства?
Находится ли транспортное средство в данный момент в состоянии подсоединения или отсоединения от контактной сети?
Преимущества, достигаемые с помощью настоящего изобретения, заключаются в том, что достигается существенное облегчение монтажа электрической сети и при этом до максимума увеличивается время, в течение которого транспортное средство получает энергию от воздушной контактной сети.
Кроме того, могут использоваться стандартные компоненты, испытанные в сфере механики.
Другое преимущество состоит в том, что отныне подсоединение и отсоединение может осуществляться с периодичностью в несколько секунд, что позволяет часто чередовать движение по воздушной контактной сети и без воздушной контактной сети и гибким образом реагировать даже на непредвиденные ситуации во время движения, например объезд внезапно возникшего препятствия, как, например, в результате аварии.
Благодаря полностью автоматизированному режиму все это может происходить без нагрузки или без осуществления вмешательства со стороны водителя вручную.
Вышеописанное оптическое распознание использует, в частности, метод сопровождения медленно движущейся цели, при котором на основании предыдущего движения можно сделать вывод о будущих передвижениях, так что даже в условиях плохой видимости, как, например, при сильном дожде или снегопаде, может быть обеспечено надежное распознавание контактного провода. Для надежного функционирования в условиях темноты достаточно маленьких ламп, например инфракрасных светодиодов, часто используемых в камерах слежения.
Описанный метод сопровождения цели соответствует следующему принципу.
Динамическим позициям контактных проводов, ожидаемым в результате предыдущих распознаваний, с учетом экстраполяции их предшествующих движений в двухмерном видеоизображении при расчете следующей ситуации присваивается (значительно) большая вероятность, что искомый образ (опять) появится.
Кроме того, в состоянии подсоединения к контактным проводам вычисленная и при необходимости определенная с помощью датчиков позиция штангового токоприемника или соответственно контактного башмака может быть использована для определения позиции контактных проводов.
Для контроля водителю на панели приборов могут быть отображены изображения, заснятые видеокамерой, с демонстрацией распознанной контактной сети и штанговых токоприемников. Если распознавание контактной сети не происходит, то и подсоединение к контактным проводам не осуществляется или соответственно происходит автоматическое отсоединение.
Въезд в зоны, в которых следует ехать в режиме подсоединения к контактной сети, то есть такие зоны, в которых по существу проложены воздушные контактные сети, распознается с помощью глобальной навигационной спутниковой системы, например GPS, то есть американской системы глобального позиционирования Global Positioning System, или ее европейского аналога Galileo, а также с помощью сохраненной карты. Аналогично распознается и приводит к плановому отсоединению от контактной сети покидание этих зон, например конец сети, подземные переходы и туннели с недостаточным просветом для контактных проводов или участок ремонтных работ с отклонением от нормальной полосы движения. Аналогичное справедливо и в случае ответвлений, для которых в принципе больше не нужны дорогие и подверженные износу (воздушные) стрелки: ответвляющаяся электрическая линия как бы заново начинается с незначительным отступом от места ответвления, поворачивающие транспортные средства в этой зоне на короткое время осуществляют отсоединение от контактных проводов, а затем присоединяются к новой электрической линии.
Аналогичное справедливо и в случае перекрестков с другими воздушными контактными сетями, а также с такими воздушными контактными сетями трамваев и железных дорог, при которых одна из обоих пересекающих пар контактных сетей просто кратковременно обрывается. Также согласно данному подходу можно не прокладывать контактные провода в зонах, в которых воздушные контактные сети создают помехи по эстетическим или другим причинам.
В режиме отсоединения от контактной сети транспортное средство снабжается энергией от накопителя (маховика, аккумулятора или конденсаторов) и/или от двигателя внутреннего сгорания (ВСУ, вспомогательной силовой установки, гибридных двигателей или топливного элемента).
Имеющийся при известных условиях в распоряжении аккумулятор заряжается рекуперативной энергией или соответственно от контактного провода или при необходимости также от ВСУ и дозаряжается с помощью применяемых в системе управления интеллектуальных эвристических методов об ожидаемом последующем использовании аккумулятора, при этом известны маршрут следования транспортного средства и его профиль расхода электроэнергии.
Может быть предусмотрена актуализация сохраненной карты по цифровой связи (GPS/UMTS или транкинговой связи) при необходимости и во время движения.
С помощью оптического контроля проводится постоянное сопоставление карты (заданные данные) с фактической ситуацией (действительные данные). При отклонении, например " внезапное отсутствие воздушной контактной сети", водителю и по цифровой связи в депо передается обратное сообщение.
Оптически заснятые данные постоянно записываются в кольцевой памяти (Silikon-Disk - «интегральный диск») (видеоданные как журнал регистрации) и их можно использовать для последующего анализа проблем.
Запланированное отсоединение на (продолжительных) отрезках, на которых требуется мало приводной энергии или соответственно на которых запитывается мало рекуперативной энергии (например, длинный участок пути с небольшим уклоном), может быть использовано для сокращения износа токоприемников и контактных сетей.
Соответственно на подобных участках пути при известных условиях может полностью отсутствовать воздушная контактная сеть.
В зонах со встречным движением, при соответствующих локальных условиях, для движения в обоих направлениях можно использовать одну общую воздушную контактную сеть. При скрещении двух троллейбусов посредством систем управления транспортных средств по цифровой связи осуществляется автоматическое согласование о том, какое из транспортных средств на короткое время произведет отсоединение от контактной сети (связь между двумя транспортными средствами). При этом на вышеупомянутой карте могут быть сохранены правила о преимуществе, так что отсоединение осуществляет тот троллейбус, для которого ожидается более низкое потребление энергии от сети. Информацию о том, что скрещение состоится, можно детектировать по цифровой связи (позиционная обратная связь отдельных троллейбусов) или по транспондеру. Отказ автоматической связи (например, выход их строя цифровой связи) может быть распознан с помощью оптического контроля и приводит к аварийному отсоединению от контактной сети обоих троллейбусов.
Отсоединение производится также при обгоне, который автоматически распознается или явным образом сигнализируется водителем, или соответственно при параллельно проходящих полосах движения в одном и том же направлении с совместно используемой воздушной контактной сетью.
Автоматическое отсоединение производится также в случае, если целевая зона штанговых токосъемников отклоняется от зоны с воздушными контактными сетями, например, при объезде участка ремонтных работ или дорожно-транспортного происшествия. Автоматическое повторное подсоединение производится, как только троллейбус достаточно продвинется в зоне с воздушными контактными сетями.
В результате создается система, отличающаяся высоким уровнем надежности в эксплуатации при низких затратах.
Реферат
Изобретением предлагается устройство и способ для автоматического подсоединения и отсоединения штангового токоприемника (3) транспортного средства, предназначенного для эксплуатации с питанием от по меньшей мере одной воздушной контактной сети (1). Устройство содержит по меньшей мере один привод (9), перемещающий штанговый токоприемник (3) и по меньшей мере один блок (6 и 7) регистрации и анализа изображения, управляющий приводом (9) таким образом, что штанговый токоприемник (3) подсоединяется и отсоединяется от воздушной контактной сети (1). При этом блок (6,7) регистрации и анализа изображений выполнен с возможностью распознавания стрео-оптического изображения штангового токоприемника (3) и воздушной контактной сети (1) и с возможностью управления на основе полученных данных по меньшей мере одним приводом (9). Технический результат заключается в обеспечении надежного и безопасного автоматического подсоединения и отсоединения токоприемников транспортного средства от воздушной контактной сети. 2 н. и 13 з.п. ф-лы, 3 ил.
Формула
по меньшей мере один привод (9), выполненный с возможностью перемещения штангового токоприемника (3) и
по меньшей мере один блок (6, 7) регистрации и анализа изображения, выполненный с возможностью управления приводом (9) таким образом, что штанговый токоприемник (3) подсоединяется и отсоединяется от воздушной контактной сети (1),
отличающееся тем, что
блок (6, 7) регистрации и анализа изображения выполнен с возможностью распознавания стерео-оптического изображения штангового токоприемника (3) и воздушной контактной сети (1) посредством стерео-оптического распознавания образов и с возможностью управления на основе полученных данных по меньшей мере одним приводом (9).
стерео-оптические камеры блока (6) регистрации и анализа изображения, выполненные с возможностью регистрации стерео-оптического изображения штангового токоприемника (3) и воздушной контактной сети.
два штанговых токоприемника (3), имеющих соответственно по одному контактному башмаку (2),
две воздушные контактные сети (1) и
по меньшей мере два привода (9), перемещающих штанговые токоприемники (3).
регистрацию изображений штангового токоприемника (3) и воздушной контактной сети (1),
анализ изображений для определения позиции штангового токоприемника (3) и воздушной контактной сети (1) и
управление приводом (9), соединенным со штанговым токоприемником (3), на основе анализа изображений таким образом, что штанговый токоприемник (3) подсоединяют и отсоединяют от воздушной контактной сети (1), отличающийся тем, что
анализ изображений осуществляют посредством стерео-оптического распознавания образов.
регистрацию и анализ изображений осуществляют стерео-оптическим методом.
систему управления выполняют с возможностью по рассчитанной позиции воздушной контактной сети (1) и контактного башмака (2) штангового токоприемника (3) устанавливать команды для привода (9), причем посредством двухмерных изображений, заснятых камерой (6), воздушную контактную сеть (1) идентифицируют соответственно как практически прямую линию, на основании чего вычисляют соответственно две почти плоские плоскости в трехмерном пространстве относительно транспортного средства, проекция которых образует практически прямые линии в двухмерном пространстве и в которых должна проходить воздушная контактная сеть (1), в связи с чем две плоскости пересекаются и тем самым в пространстве в качестве пересечения множеств вычисляют линию, являющуюся практически прямой относительно транспортного средства, и аналогичным образом определяют стерео-оптическим методом позицию соответствующего контактного башмака (2) штангового токоприемника (3) в пространстве как приблизительную точку пересечения линий в пространстве, которые вычисляют посредством проекции выбранной соответствующим образом точки контактного башмака (2) в обоих двухмерных изображениях.
посредством вышестоящего уровня системы управления выдают команду для подсоединения и отсоединения, то есть прижатия штангового токоприемника (3) к воздушной контактной сети (1) и отсоединения и/или закрепления в устройстве (8) фиксации штанг, причем вышестоящий уровень системы управления опирается на сохраненную цифровую карту, в которой на плане маршрутов отмечают зоны, во время которых транспортное средство необходимо эксплуатировать в основном подсоединенным к контактной сети, и при покидании транспортным средством этих зон выдают команду для автоматического отсоединения и, наоборот, при въезде транспортного средства в зону с воздушной контактной сетью (1) предоставляют возможность запрашивания автоматического подсоединения, в связи с чем каждый раз позицию транспортного средства на цифровой карте определяют с помощью глобальной навигационной спутниковой системы.
вместо традиционных стрелок для поворачивающих воздушных контактных сетей (1) воздушную контактную сеть (1) заново начинают после места поворота, при этом посредством системы управления обеспечивают кратковременное отсоединение поворачивающего транспортного средства и новое подсоединение к заново начинающейся воздушной контактной сети (1), что является аналогичным и для ситуаций, в которых транспортное средство пересекает перекресток и соответствующая ему воздушная контактная сеть (1) прерывается.
кратковременное отсоединение посредством системы управления 21
производят также в результате того, что транспортное средство встречает или проезжает мимо другого подобного транспортного средства, использующего ту же самую воздушную контактную сеть (1), причем оба транспортных средства связываются между собой по цифровой радиосвязи (7) и совместно определяют, какое из обоих транспортных средств произведет отсоединение от контактной сети.
Комментарии