Способ и устройство для осуществления процесса тестирования рельсового транспортного средства - RU2675728C2
Код документа: RU2675728C2
Чертежи
Описание
Изобретение относится к способу осуществления процесса тестирования рельсового транспортного средства.
К режиму работы рельсовых транспортных средств в настоящее время предъявляются всё более жёсткие требования по безопасности. Кроме того, имеют место и другие требования со стороны железнодорожных операторов, которые – для снижения затрат в связи с производственными отказами и ремонтом при выходе из строя – предполагают небольшое число отказов, большие интервалы профилактических осмотров и небольшое время технического обслуживания. Чтобы принимать в расчёт эти требования, разрабатываются резервные системы или специальная архитектура для рельсовых транспортных средств.
В основе изобретения лежит задача создания способа ранее указанного типа, при котором может быть получена быстро работающая, оперативная и точная при регистрации ошибок контрольная среда, в частности, без дорогостоящих согласований системы и архитектуры с рельсовым транспортным средством.
Для этого предлагается, чтобы стационарный блок управления и блок моделирования были расположены в стационарном месте, был сформирован канал передачи данных между стационарным блоком управления и рельсовым транспортным средством, был сформирован канал передачи данных между стационарным блоком управления и блоком моделирования, и процесс тестирования включал в себя обмен данными стационарного блока управления с рельсовым транспортным средством и с блоком моделирования. Благодаря этому, может быть сформирована контрольная среда, которая позволяет осуществлять быструю и точную регистрацию ошибок, и имеет высокую оперативность. Оперативность может быть достигнута, в частности, за счёт того, что на основании обмена данных с рельсовым транспортным средством и с блоком моделирования возможно обоюдное воздействие друг на друга систем «рельсовое транспортное средство» и «блок моделирования». В частности, в форме стационарного блока управления может быть образован – в предпочтительном варианте связывающий – блок, который обрабатывает параметры процесса в транспортном средстве и параметры моделирования в блоке моделирования, в частности, синхронно – то есть, по меньшей мере, во время одного и того же временного интервала.
При наличии ошибки в ходе работы рельсового транспортного средства при поддержке стационарного блока управления посредством процесса моделирования возможно быстро и точно распознать ошибку. Это приносит дополнительное преимущество, так как меры по устранению ошибки могут быть предприняты быстро и целенаправленно.
Стационарный блок управления имеет в целесообразном варианте, по меньшей мере, один процессорный блок, который предусмотрен для осуществления модулей тестовых программ, а также запоминающий блок, который служит для сохранения модулей тестовых программ. Эти программные модули относятся в целесообразном варианте к программному обеспечению, одна версия которого инсталлирована в рельсовое транспортное средство, и которое создано, в частности, для смешанного программного управления процессами в рельсовом транспортном средстве.
Для формирования канала передачи данных между стационарным блоком управления и рельсовым транспортным средством используются обычные, защищённые от внешних воздействий, протоколы обмена данными. В особо предпочтительном варианте этот канал передачи данных осуществлён как резервный.
В предпочтительном варианте осуществления изобретения блок моделирования имеет компоненты транспортного средства и среду моделирования, в которую встроены компоненты. Блок моделирования служит в режиме моделирования для тестирования компонентов транспортного средства, которые встроены в среду моделирования, которая моделирует реальную среду соответствующих компонентов транспортного средства в рельсовом транспортном средстве. Компоненты транспортного средства могут включать в себя компоненты аппаратных средств – к примеру, исполнительные механизмы или механизмы управления – и/или компоненты программного обеспечения – к примеру, программные модули системы управления. При этом среда моделирования формирует в предпочтительном варианте среду, которая на профессиональном языке именуется как среда «с аппаратными средствами в контуре управления » или как среда «с программными средствами в контуре управления». Для образования блока моделирования могут использоваться традиционные компоненты моделирования, которые включают в себя программы моделирования и/или механические моделирующие устройства. Они служат в режиме моделирования для поддержания проектирования нового рельсового транспортного средства.
В соответствии с предпочтительным вариантом осуществления изобретения предлагается, чтобы параметры процесса в транспортном средстве передавались на стационарный блок управления, и стационарный блок управления осуществлял анализ параметров процесса на основании параметром моделирования процесса моделирования. Благодаря этому, может быть образован тестовый режим стационарного блока управления, в котором посредством параметров процесса в транспортном средстве отображается фактическое состояние рельсового транспортного средства, генерированные процессом моделирования параметры моделирования представляют собой заданное состояние рельсового транспортного средства, и в результате анализа параметров процесса рельсового транспортного средства и параметров моделирования производится сравнение между фактическим состоянием и заданным состоянием. В этом тестовом режиме ошибка в процессе работы рельсового транспортного средства может быть зарегистрирована особенно быстро и точно. В частности, сравнение заданного и фактического значений, может быть осуществлено, по возможности, в режиме реального времени, в частности, во время прохождения рельсовым транспортным средством участка пути.
В предпочтительном варианте выполнения изобретения предлагается, чтобы параметры процесса в транспортном средстве передавались на стационарный блок управления и стационарный блок управления осуществлял изменение параметров моделирования блока моделирования на основании параметров процесса. Благодаря этому, может быть сформирован режим согласования стационарного блока управления, который служит для согласования блока моделирования, и в котором посредством параметров процесса в транспортном средстве отображается фактическое состояние рельсового транспортного средства, а параметры моделирования согласуются с фактическим состоянием. Этот режим согласования может служить, в частности, для того, чтобы для согласования параметров блока моделирования учитывать осуществлённые в рельсовом транспортном средстве изменения или изменения, которые выявляются, к примеру, при работе компонентов транспортного средства со сбоями. Это согласование параметров может включать в себя, в частности, согласование параметров моделирования, которые важны для встроенной среды моделирования, и на основании которых осуществляется процесс моделирования, и/или согласование программных модулей, посредством которых осуществляется моделирование.
Далее предлагается, чтобы стационарный блок управления на основании параметров моделирования процесса моделирования, по меньшей мере, частично оказывал воздействие, по меньшей мере, на один процесс в транспортном средстве. Благодаря этому, может быть сформирован тестовый режим стационарного блока управления, в котором тестируется процесс в транспортном средстве. Он может быть осуществлён стационарным блоком управления на основании параметров, которые определяются и/или задаются посредством процесса моделирования. При этом целесообразным образом в основе процесса в транспортном средстве, на который было оказано частичное или полное воздействие, лежат параметры моделирования. В частности, процесс в транспортном средстве может быть протестирован посредством того, что на основании параметров моделирования процессу в транспортном средстве задаётся параметр – к примеру, входной параметр и/или параметр обслуживания – причём этот параметр отличается от реального значения в рельсовом транспортном средстве. Благодаря этому, в рельсовом транспортном средстве искусственно могут быть созданы тестовые условия, которые отличаются от реальных условий.
Под термином «по меньшей мере, частичное воздействие» на процесс посредством стационарного блока управления следует понимать процесс, который включает в себя, по меньшей мере, запуск, инициирование, приведение в действие, управление, регулировку, изменение и/или окончание процесса посредством стационарного блока управления.
По меньшей мере, частичное воздействие осуществляется в целесообразном варианте посредством управляющего соединения, которое формируется и приводится в действие между стационарным блоком управления и, по меньшей мере, одним блоком управления рельсового транспортного средства, посредством канала передачи данных и, в частности, делает возможной передачу управляющих параметров стационарного блока управления, по меньшей мере, на один блок управления рельсового транспортного средства. По меньшей мере, одним блоком управления рельсового транспортного средства может быть центральный, вышестоящий по отношению к локальным блокам управления, в частности, к локальным блоком управления подсистемами, блок управления. К примеру, по меньшей мере, один блок управления может соответствовать центральному блоку управления (или «ZSG») рельсового транспортного средства. Если процесс в транспортном средстве является процессом локальной подсистемы, то управляющее соединение может быть сформировано посредством центрального блока управления, на который со стационарного блока управления подаётся команда по оказанию, по меньшей мере, частичного воздействия на соответствующий локальный процесс в транспортном средстве. В альтернативном варианте управляющее соединение может быть сформировано и приведено в действие между стационарным блоком управления и соответствующим локальным, по меньшей мере, частично назначенным для осуществления процесса в транспортном средстве, блоком управления, причём это управляющее соединение в предпочтительном варианте формируется посредством центрального блока управления.
Для, по меньшей мере, частичного воздействия на процесс в транспортном средстве посредством стационарного блока управления служат в предпочтительном варианте его, описанные выше, модули программного обеспечения, одна версия которого инсталлирована в рельсовое транспортное средство, и которое предусмотрено, в частности, для смешанного программного управления процессами в транспортном средстве.
В частности, предлагается, чтобы параметры моделирования моделировали, по меньшей мере, одну ошибку в рельсовом транспортном средстве. Посредством этого возможно осуществить введение ошибки, по меньшей мере, в одну подсистему рельсового транспортного средства, благодаря чему может быть зарегистрирована и проанализирована её реакция на ошибку. Этот анализ может быть произведён, как описано выше, на базе сравнения фактического состояния рельсового транспортного средства, которое взаимосвязано с поведением рельсового транспортного средства при наличии ошибки, с установленным посредством блока моделирования заданным состоянием рельсового транспортного средства, которое характеризует заданное поведение рельсового транспортного средства. Посредством такого тестового режима могут быть эффективно предотвращены аварийные ситуации, в частности, небезопасные состояния рельсового транспортного средства.
Далее предлагается, чтобы параметры процесса в рельсовом транспортном средстве передавались на стационарный блок управления и стационарный блок управления инициировал осуществление процесса моделирования на основании параметров процесса. Это является предпочтительным в рамках согласования, в частности, тренировки блока моделирования.
В вышеописанном варианте осуществления, при котором блок моделирования имеет компоненты транспортного средства и среду моделирования, в которую встроены компоненты, предлагается, чтобы среда моделирования имела интерфейс, посредством которого осуществлялся обмен данными с автоматизированной системой проектирования. Под термином «автоматизированная система проектирования» должна пониматься поддержка рабочих процессов в технике, причём поддержанные рабочие процессы включают в себя, по меньшей мере, разработку дизайна, в частности, дизайна конструкции (или «Computer Aided Design», также «CAD»), разработку цифрового управления – именуемую также «NC-программирование» (то есть, программирование «Numerical Controls» или «цифровое управление») – в рамках производства (или «Computer Aided Manufacturing», также «CAM») и/или другие процессы, которые в целом относятся к автоматизированной системе проектирования в соответствии с профессиональным понятием «Computer Aided Engineering» (также «CAE»). В предложенном варианте осуществления, при котором параметры такой системы могут передаваться на блок моделирования, осуществлённые в данной системе изменения посредством блока моделирования могут учитываться автоматически и предпочтительно в режиме реального времени. Обмен данными между автоматизированной системой проектирования и блоком моделирования может поддерживаться посредством блока преобразования формата – к примеру, в форме «анализатора» – который относится к интерфейсу.
Функционирование автоматизированной системы проектирования базируется в целесообразном варианте, по меньшей мере, на одном наборе параметров моделирования из группы: данные схемы соединений, библиотеки конструктивных элементов, данные библиотек для дизайн-программы.
В связи с этим и в связи с вышеописанным вариантом осуществления, при котором параметры процесса в транспортном средстве передаются на стационарный блок управления и стационарный блок управления инициирует изменение параметров моделирования блока моделирования на основании параметров процесса, предлагается, чтобы изменение включало в себя согласование, по меньшей мере, одного набора параметров, на основании параметров процесса. Благодаря этому, изменения в конфигурации рельсового транспортного средства, которые регистрируются на основании параметров процесса, могут моделироваться, по меньшей мере, в один набор параметров автоматизированной системы проектирования, вследствие чего можно добиться максимальной автоматической актуализации блока моделирования. Если набор параметров включает в себя данные схемы соединений, то может быть осуществлено максимальное автоматическое генерирование схемы соединений посредством блока моделирования.
Далее предлагается, чтобы процесс тестирования осуществлялся во время режима прохождения рельсовым транспортным средством участка пути. Благодаря этому, может осуществляться обширный, целенаправленный и в предпочтительном варианте автоматический контроль рельсового транспортного средства во время движения по участку. В предпочтительном варианте осуществляется тестовый режим, который никак не влияет на безопасность пассажиров. В частности, в предпочтительном варианте осуществляется тестовый режим, который производит сравнение фактического состояния рельсового транспортного средства с установленным посредством блока моделирования заданным значением.
Этот вариант является предпочтительным в плане безопасности пассажиров, так как посредством тестового режима может быть распознано небезопасное состояние рельсового транспортного средства, в особо предпочтительном варианте во время прохождения участка пути. Могут быть быстро и целенаправленно предприняты меры для приведения рельсового транспортного средства в безопасное состояние. Благодаря этому, могут быть выполнены требования по безопасности, которые являются условием для допуска транспортного средства к эксплуатации. Под «требованиями безопасности» должны пониматься, в частности, требования, которые определены в нормативах EN 50128, 50159, 50126 и/или 50129, и должны быть рассчитаны, в частности, на безопасность пассажиров.
В частности, при наличии небезопасного состояния может быть запущен механизм экстренного торможения рельсового транспортного средства.
Изобретение относится далее к устройству для осуществления процесса тестирования рельсового транспортного средства. Предлагается, чтобы устройство было оснащено стационарным блоком управления, блоком моделирования и интерфейсом данных, которые имеются на стационарной станции, причём стационарный блок управления для осуществления передачи данных находится в рабочем взаимодействии с блоком моделирования и предусмотрен для того, чтобы посредством интерфейса данных формировать канал передачи данных с рельсовым транспортным средством и осуществлять процесс тестирования на основании обмена данными с рельсовым транспортным средством и с блоком моделирования. Благодаря этому, может быть сформирована контрольная среда, которая позволяет осуществлять быструю и точную регистрацию ошибок, и имеет высокую оперативность. Для выявления предпочтительных воздействий и проявлений предложенного устройства ссылаются на представленный выше вариант осуществления касательно предложенного способа.
Пример осуществления изобретения поясняется на основании чертежей, на которых представлено следующее:
фиг. 1 - рельсовое транспортное средство на схематичном виде сбоку;
фиг. 2 - система, включающая в себя рельсовое транспортное средство и центральную контрольно-испытательную станцию, которая имеет блок управления и блок моделирования;
фиг. 3 - блок моделирования в схематичном детальном изображении;
фиг. 4 - взаимодействие между компонентами рельсового транспортного средства и блоком управления центральной контрольно-испытательной станции.
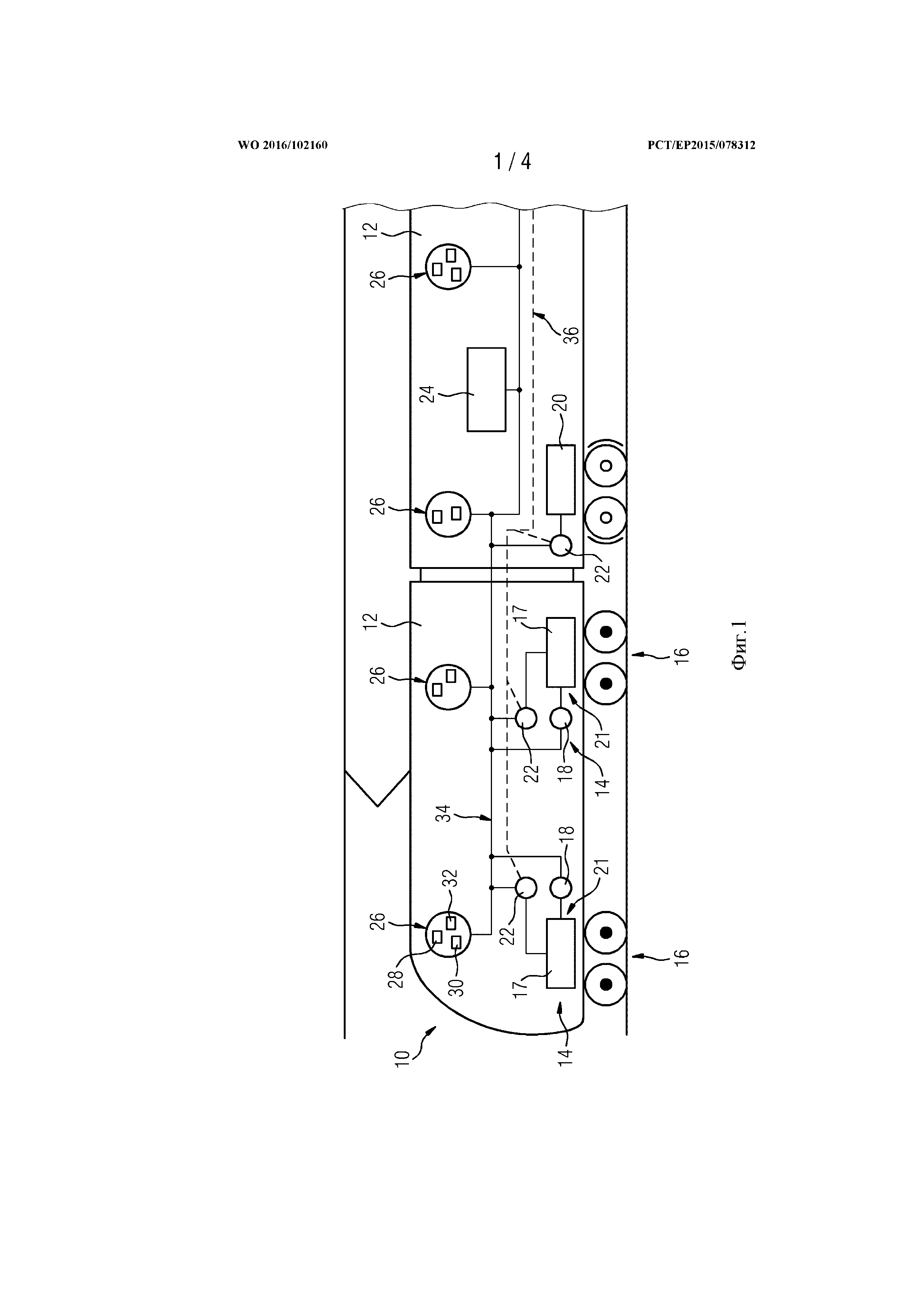
Фиг. 1 демонстрирует рельсовое транспортное средство 10 на схематичном виде сбоку. Оно выполнено в виде системы вагонов 12, которые, соответственно, предусмотрены для перевозки пассажиров, причём, по меньшей мере, один вагон 12 осуществлён в виде моторного вагона. Вариант осуществления рельсового транспортного средства 10 в виде мотор-вагонного поезда для перевозки пассажиров представлен в качестве примера. В альтернативном варианте рельсовое транспортное средство может быть осуществлено в виде локомотива или в виде системы из локомотива с присоединёнными пассажирскими вагонами.
В рассматриваемом варианте осуществления последний вагон выполнен, к примеру, в виде моторного вагона. Моторный вагон имеет, по меньшей мере, один приводной блок 14, который присоединён, по меньшей мере, к одному моторному ходовому механизму 16, к примеру, к моторной поворотной тележке, и предусмотрен для приведения в действие, по меньшей мере, одной ведущей оси присоединённого моторного ходового механизма 16. Рельсовое транспортное средство 10 имеет приводные блоки 14, которые имеют, соответственно, по меньшей мере, один тяговый двигатель (не изображён), блок 17 подачи мощности и устройство 18 для управления приводом. Оно служит для управления подачей мощности на тяговый двигатель посредством блока 17 подачи мощности, который осуществлён, в частности, в виде инвертора.
Рельсовое транспортное средство 10 имеет далее тормозной механизм с комплектом тормозных блоков 20, которые выполнены, в частности, в виде выполненных с возможностью приведения в действие пневматическим способом фрикционных тормозов, а также осуществлённые в виде электрических моторных тормозов тормозные блоки 21, которые осуществлены посредством комплекта приводных блоков 14. Тормозные блоки 20 и 21 управляются посредством устройств 22 для управления тормозом. Кроме того, рельсовое транспортное средство 10 включает в себя центральный блок 24 управления, который является вышестоящим по отношению к локальными устройствам управления, в частности, к устройствам 18 для управления приводом и к устройствам 22 для управления тормозом.
Наряду с приводными блоками 14 и с тормозным механизмом, рельсовое транспортное средство 10 имеет другие подсистемы 26, которые включают в себя, соответственно, по меньшей мере, один блок 28 управления, исполнительный блок 30 и/или сенсорный блок 32. Подсистема 26 и её внутренние компоненты представлены на фигуре лишь схематично.
Приводные блоки 14, тормозные блоки 20, 21 и другие подсистемы 26 подсоединены к системе 34 информационных шин электрической цепи рельсового транспортного средства 10. Система 34 информационных шин представлена схематично и может включать в себя несколько, отличающихся друг от друга и соединённых друг с другом для передачи данных информационных шин. Центральный блок 24 управления также подсоединён к системе 34 информационных шин, причём обмен данными для передачи информации, данными управления и/или данными сенсоров между подсистемой 26 и центральным блоком 24 управления осуществляется через систему 34 информационных шин.
Рельсовое транспортное средство 10 включает в себя далее комплект предохранительных контуров 36, которые назначены, соответственно, для предохранения рельсового транспортного средства 10. Типичным примером является при этом контур экстренного торможения, посредством которого экстренное торможение может быть инициировано пассажиром.
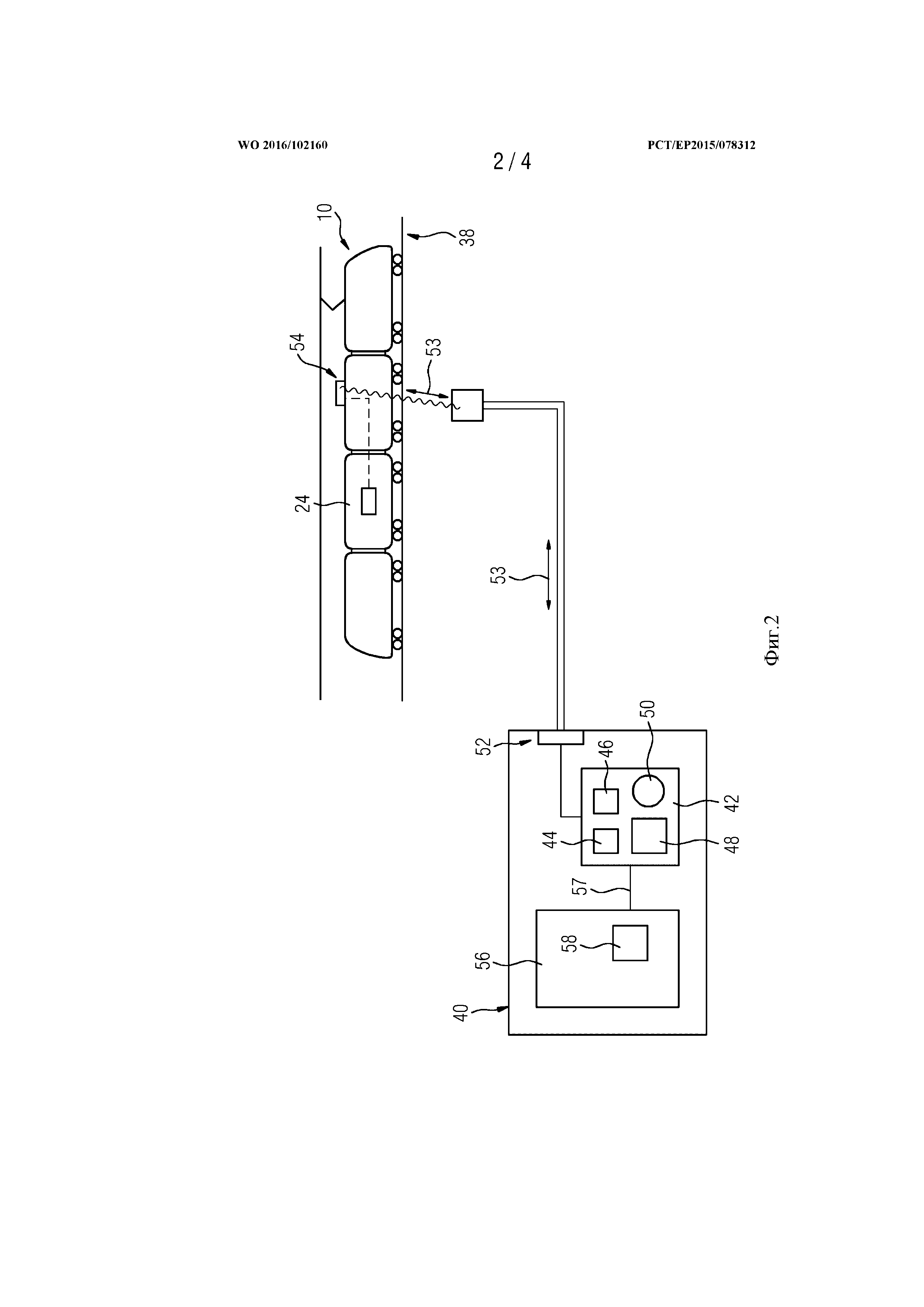
Фиг. 2 демонстрирует рельсовое транспортное средство 10 на упрощённом, по сравнению с фиг. 1, виде на участке 38, а также удалённую центральную контрольно-испытательную станцию 40. На этой центральной контрольно-испытательной станции находится, по меньшей мере, один блок 42 управления, который выполнен с возможностью управления оператором. Для этого блок 42 управления имеет, по меньшей мере, одно устройство 44 ввода, которое предназначено для ввода данных оператором, а также устройство 46 вывода, которое предусмотрено для вывода, в частности, по меньшей мере, для оптического вывода данных на оператора. В отличие от центрального блока 24 управления рельсового транспортного средства 10, блок 42 управления центральной контрольно-испытательной станции называется «стационарный блок управления». К примеру, стационарный блок управления может быть осуществлён в виде ПК (или «персонального компьютера»). При работе на стационарном блоке 42 управления могут осуществляться, как будет описано ниже, процессы тестирования рельсового транспортного средства 10. В альтернативном варианте или в дополнение к этому, эти процессы тестирования могут осуществляться автоматически, то есть, без необходимости работы на блоке 42 управления, причём информация о ходе и результатах тестирований автоматически выдаётся посредством устройства 46 вывода. При этом возможно, чтобы блок 42 управления был осуществлён без интерфейса «человек-машина», то есть, без устройства ввода и вывода.
Стационарный блок 42 управления имеет, по меньшей мере, один процессорный блок 48 и запоминающее устройство 50, в котором программные модули для осуществления процессов тестирования сохраняются посредством процессорного блока 48.
Центральная контрольно-испытательная станция 40 имеет далее интерфейс 52 данных, посредством которого может формироваться канал 53 передачи данных с рельсовым транспортным средством 10. Для этого рельсовое транспортное средство 10 включает в себя интерфейс 54 данных, посредством которого может формироваться канал передачи данных с интерфейсом 52 данных центральной контрольно-испытательной станции 40. Канал 53 передачи данных между интерфейсами 52 и 54 данных может быть, по меньшей мере, частично осуществлён проводным. Сформированное между интерфейсами 52, 54 данных соединение служит, в частности, для формирования канала 53 передачи данных между стационарным блоком 42 управления и рельсовым транспортным средством 10, в частности, его центральным блоком 24 управления. Для этого стационарный блок 42 управления для передачи данных находится в рабочем взаимодействии с интерфейсом 52 данных, а центральный блок 24 управления рельсового транспортного средства 10 для передачи данных находится в рабочем взаимодействии с интерфейсом 54 данных.
Центральная контрольно-испытательная станция 40 имеет, кроме того, блок 56 моделирования, посредством которого осуществляются процессы моделирования. Стационарный блок 42 управления через канал 57 передачи данных для осуществления передачи данных находится в рабочем взаимодействии, по меньшей мере, с одним вычислительным блоком 58 блока 56 моделирования.
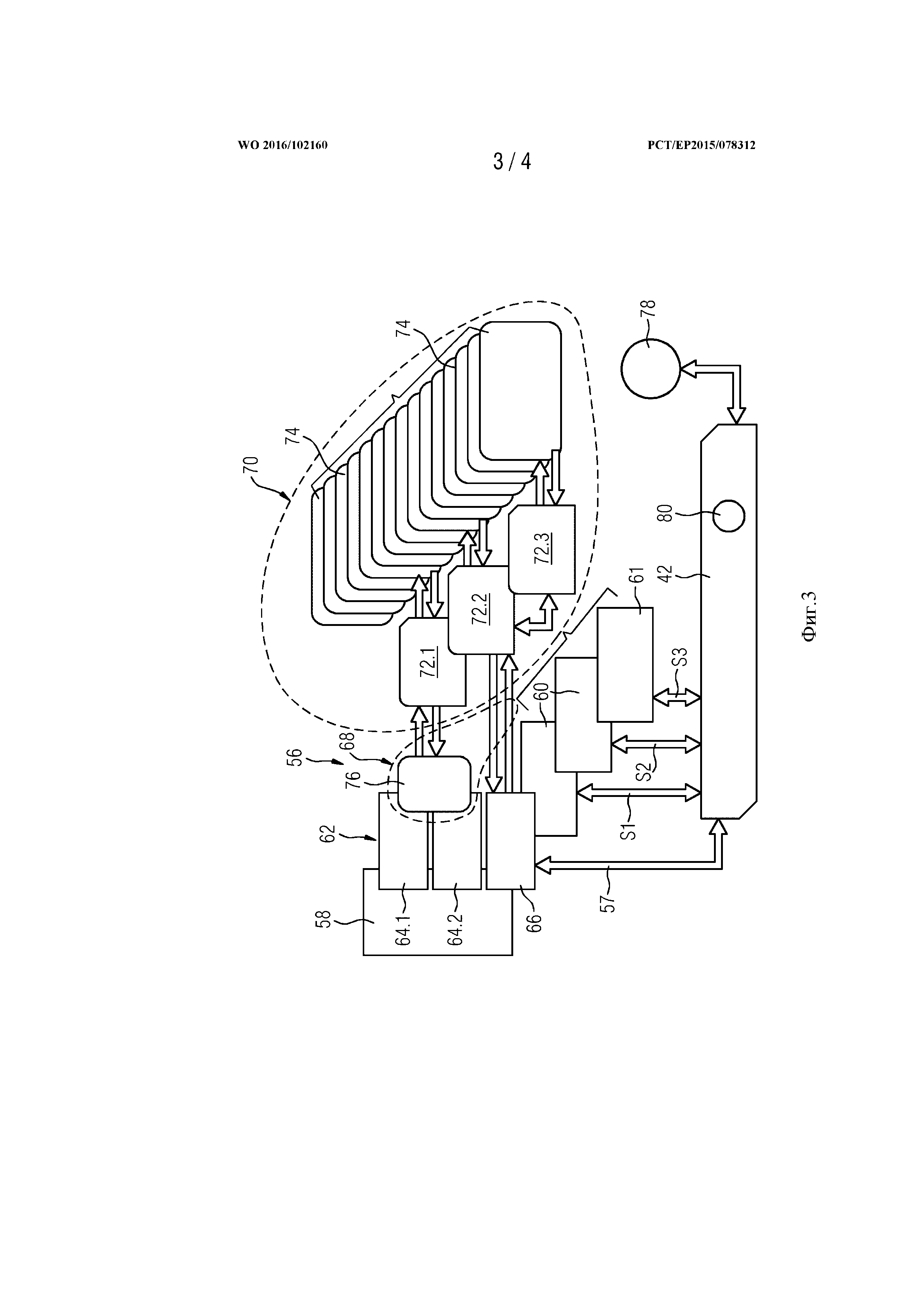
Блок 56 моделирования более детально представлен на фиг. 3. Также изображены канал 57 передачи данных блока 56 моделирования со стационарным блоком 42 управления, а также этот блок 42 управления. Блок 56 моделирования имеет компоненты 60 транспортного средства в форме аппаратных средств, к примеру, устройств управления, механических исполнительных устройств и проч., и/или программного обеспечения, к примеру, программ управления, программ регулирования и проч., которые встроены в среду 62 моделирования. Компоненты 60 транспортного средства соответствуют реальным компонентам, которые расположены в рельсовом транспортном средстве 10. Компоненты 60 транспортного средства могут быть, кроме того, соединены друг с другом посредством электропроводки 61, которая соответствует реальной электропроводке в рельсовом транспортном средстве 10. Среда 62 моделирования имеет комплект моделирующих программ 64.1, 64.2 и механические моделирующие устройства 66, которые могут быть осуществлены или могут управляться посредством вычислительного блока 58. На этапе разработки эти моделирующие программы 64 или механические моделирующие устройства 66 могут отдельно управляться оператором. Компоненты 60 транспортного средства и электропроводка 61 вместе со средой 62 моделирования образуют систему, которая на профессиональном языке именуется как среда «с аппаратными средствами в контуре управления» («Hardware-in-the-loop» или «HIL») или как среда «с программными средствами в контуре управления» («Software-in-the-loop» или «SIL»). Компоненты среды 62 моделирования служат при этом для того, чтобы смоделировать реальную среду компонентов 60 транспортного средства в системе, образованной рельсовым транспортным средством 10. Известными моделирующими программами 64 являются, к примеру, Labview® или dSPACE®.
Как описано выше, стационарный блок 42 управления для осуществления передачи данных находится в рабочем взаимодействии с вычислительным блоком 58 блока 56 моделирования, причём вычислительный блок 58 служит для осуществления модулирующих программ 64.1 и 64.2. Для этого вычислительный блок 58 оснащён, по меньшей мере, одним процессорным блоком (не изображён).
Блок 56 моделирования имеет далее интерфейс 68, посредством которого данные автоматизированной системы 70 проектирования принимаются средой 62 моделирования. Автоматизированная система 70 проектирования имеет комплект проектировочных программ 72.1, 72.2, 72.3, которые осуществляются соответствующими блоками управления или вышестоящим блоком управления (не изображён). К примеру, проектировочная программа 72.1 является общей программой компьютерного моделирования («Computer-aided Engineering» или «CAE»). Проектировочная программа 72.2 может быть, в частности, дизайн-программой или программой компьютерного конструирования («Computer-aided Design» или «CAD»). Проектировочная программа 72.3 может быть, в частности, производственной программой или программой компьютерного производства («Computer-aided Manufacturing» или «CAM»). Эти проектировочные программы 72, для доступа к ним, находятся, соответственно, в соединении с наборами 74 данных моделирования. Этими наборами 74 данных являются при этом, в частности, данные схемы соединений, библиотеки конструктивных элементов и/или данные библиотек для дизайн-программы.
Проектировочная программа 72.2 находится в предпочтительном варианте в рабочем взаимодействии с механическими моделирующими устройствами 66, с одной стороны, и с проектировочной программой 72.3, с другой стороны. Проектировочная программа 72.1 в предпочтительном варианте находится в рабочем взаимодействии с моделирующими программами 64.1, 64.2. Обмен данными между моделирующими программами 64.1, 64.2 и проектировочной программой 72.1 осуществляется посредством блока 76 преобразования формата – именуемого также «анализатором» – который относится к интерфейсу 68.
Блок 56 моделирования имеет далее программу 78 моделирования участка пути, посредством которой формируются параметры моделирования, которые учитываются моделирующими программами 64 при осуществлении процессов моделирования. Эти параметры моделирования служат для того, чтобы смоделировать имеющиеся, относящиеся к данному участку пути, условия при прохождении участка пути, при которых осуществляется управление компонентами 60 транспортного средства. Сопряжение этих параметров моделирования осуществляется посредством стационарного блока 42 управления, который для осуществления передачи данных соединён с программой 78 моделирования участка пути.
В соответствии с первым, осуществлённым в виде реального режима моделирования, тестовым режимом стационарного блока 42 управления в процессе моделирования блок 56 моделирования осуществляет управление встроенными в среду 62 моделирования компонентами 60 транспортного средства. Такое управления осуществляется, в частности, посредством стационарного блока 42 управления через вычислительное устройство 58, которое осуществляет, по меньшей мере, одну программу моделирования с функцией HIL и/или SIL. Настройка компонентов 60 транспортного средства посредством стационарного блока 42 управления на фиг. 3 схематично представлена стрелками S1 и S2, которые обозначают сформированные между блоком 42 управления и компонентами 60 управляющие соединения. Посредством следующего, также лишь схематично представленного управляющего соединение S3 осуществляется управление элементами электропроводки 61, посредством блока 42 управления. К примеру, может быть активирована или деактивирована проводная связь, чтобы смоделировать, к примеру, обрыв проводов. В таком режиме осуществляется обмен данными между стационарным блоком 42 управления и блоком 56 моделирования, при котором параметры управления с блока 42 управления для осуществления процесса моделирования переносятся на блок 56 моделирования, а полученные в процессе моделирования параметры моделирования передаются на блок 42 управления.
При осуществлении режима моделирования также могут быть учтены сформированные программой 78 моделирования участка пути параметры моделирования. Программа моделирования с функцией HIL и/или SIL, как описано ранее, использует параметры моделирования автоматизированной системы 70 проектирования. Режим моделирования блока 42 управления осуществляется, в частности, на базе программного обеспечения 80, которым оснащён стационарный блок 42 управления и которое соответствует реальному программному обеспечению системы управления рельсовым транспортным средством 10, которое осуществляется, к примеру, посредством реального управления рельсовым транспортным средством 10 в ходе его эксплуатации. Программное обеспечение 80 заложено в запоминающее устройство 50.
Осуществлённый в режиме моделирования процесс моделирования формирует параметры моделирования, которые через канал 57 передачи данных анализируются посредством стационарного блока 42 управления и/или сохраняются для дальнейшего анализа.
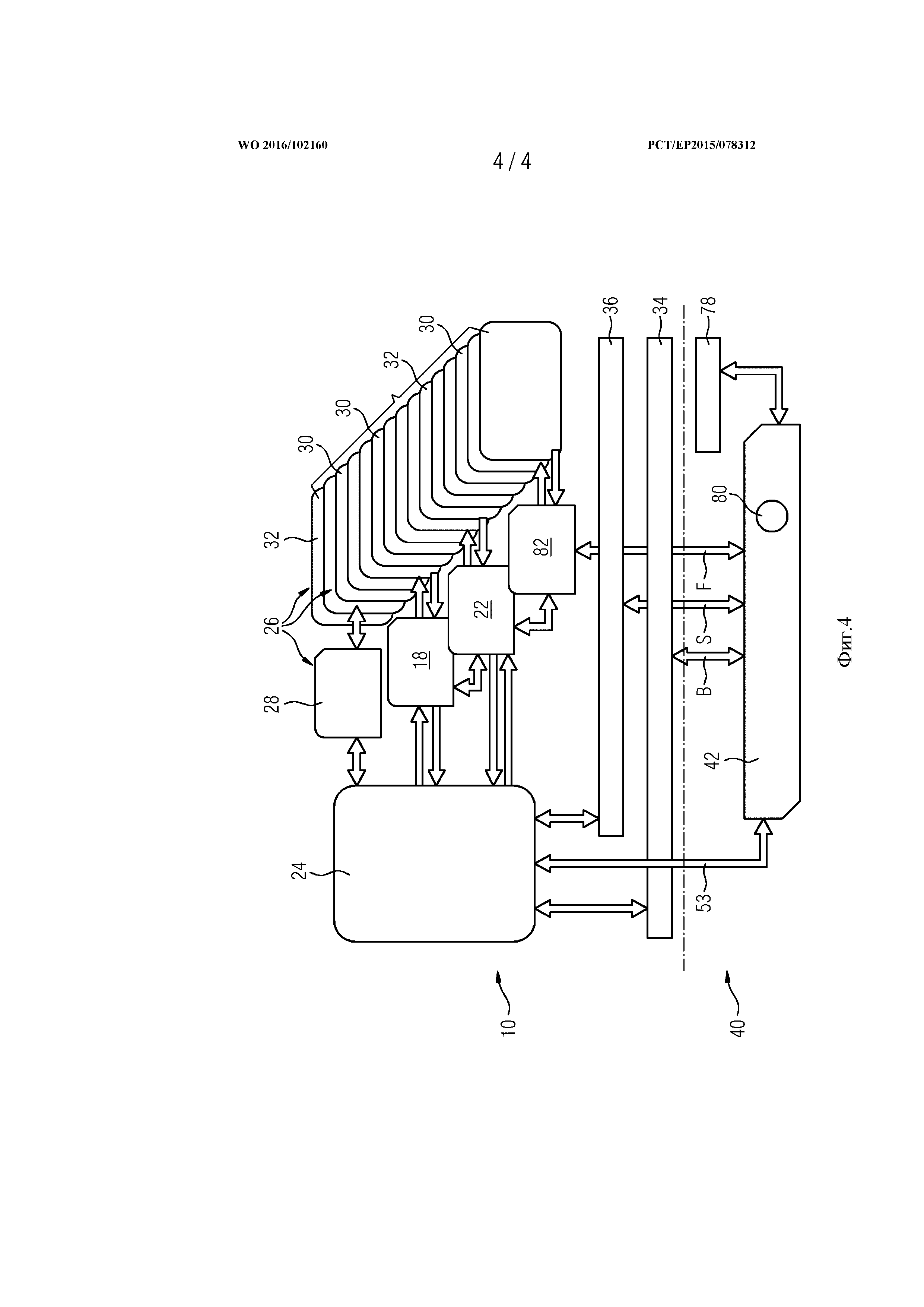
Взаимодействия стационарного блока 42 управления с рельсовым транспортным средством 10 и его реальными компонентами поясняются на основании фиг. 4 более детально. На ней представлены стационарный блок 42 управления, центральный блок 24 управления рельсовым транспортным средством 10 и канал 53 передачи данных. Кроме того, схематично представлены устройство 18 для управления приводом, устройство 22 для управления тормозом и блок 28 для управления подсистемами. Также представлены система 34 информационных шин и предохранительный контур 36.
Блоки 28 управления подсистемами, устройства 18 для управления приводом и устройства 22 для управления тормозом для осуществления передачи данных находятся, с одной стороны, в рабочем взаимодействии с компонентами транспортного средства, которые соответствуют, в частности, сенсорным блокам 32, блокам 30 исполнительных элементов и электропроводке, а, с другой стороны, как описано выше, находятся в рабочем взаимодействии с центральным блоком 24 управления.
Стационарный блок 42 управления может через канал 53 передачи данных с центральным блоком 24 управления оказывать воздействие на процессы в транспортном средстве. При этом стационарный блок 42 управления и центральный блок 24 управления предусмотрены для того, чтобы во взаимодействии посредством канала 53 передачи данных формировать и эксплуатировать управляющие соединения. Для этого стационарный блок 42 управления – как уже описано выше – оснащён программным обеспечением 80. Оно соответствует реальному программному обеспечению, которое установлено на рельсовом транспортном средстве 10. Как показано на фиг. 4 посредством стрелок B и S, которые, соответственно, обозначают управляющее соединение, стационарный блок 42 управления может оказывать воздействие на обмен данными через систему 34 информационных шин, а также на базирующиеся на работе предохранительного контура 36 процессы. Описываются и другие тестовые режимы стационарного блока 42 управления.
В тестовом режиме стационарного блока 42 управления он служит для того, чтобы через канал 53 передачи данных параметры с датчиков, которые регистрируются, по меньшей мере, одним сенсорным блоком 32 подсистемы 26, и могут передаваться, к примеру, в форме диагностических параметров, скачивать для сохранения и/или для анализа рельсового транспортного средства 10. В этом случае происходит обмен данными между рельсовым транспортным средством 10 и стационарным блоком 42 управления, при котором параметры с датчиков передаются на него.
В следующем тестовом режиме стационарный блок 42 управления служит для того, чтобы тестировать, по меньшей мере, один определённый процесс в подсистеме 26 транспортного средства – к примеру, процесс в её блоке 30 исполнительных элементов, в приводном блоке 14 и/или в тормозном блоке 20, 21. При этом процесс в транспортном средстве может быть запущен, изменён, в частности, проконтролирован или отрегулирован, или же завершён, посредством стационарного блока 42 управления. Параметры процесса, которые формируются в связи с процессом в транспортном средстве, скачиваются посредством стационарного блока 42 управления для сохранения и/или анализа. В данном случае происходит обмен данными между рельсовым транспортным средством 10 и стационарным блоком 42 управления, при котором параметры управления передаются от блока 42 управления на рельсовое транспортное средство 10, а зарегистрированные параметры процесса с рельсового транспортного средства 10 передаются на него.
Далее представленные ниже тестовые режимы стационарного блока 42 управления включают в себя, соответственно, обмен данными стационарного блока 42 управления с рельсовым транспортным средством 10 и с блоком 56 моделирования.
В тестовом режиме стационарного блока 42 управления осуществляется анализ параметров процесса в рельсовом транспортном средстве 10 на основании параметров моделирования процесса моделирования блока 56 моделирования. К примеру, как описано выше, параметры с датчиков в рельсовом транспортном средстве 10 могут регистрироваться и передаваться на центральную контрольно-испытательную станцию 40. Эти параметры с датчиков в конкретном примере представляют собой параметры приводного блока 14, в частности, напряжение, приводную мощность и температуру в блоке 17 подачи мощности. Эти параметры с датчиков регистрируются во время движения рельсового транспортного средства 10 на определённом участке. Стационарный блок 42 управления инициирует процесс моделирования блока 56 моделирования, в котором определяется температура смоделированного в блоке 56 моделирования приводного блока при одинаковых условиях по напряжению и мощности. Зарегистрированные во время процесса в транспортном средстве параметры процесса, то есть, параметры с датчиков, соответствуют фактическому состоянию рельсового транспортного средства 10, и полученные в процессе моделирования параметры моделирования приводятся в соответствие с заданным состоянием рельсового транспортного средства 10. При наличии параметров процесса и параметров моделирования посредством стационарного блока 42 управления может быть осуществлено сравнение заданных и фактических величин, причём при отклонении генерируется указание оператору блока 42 управления посредством устройства 46 вывода данных и/или посредством автоматического блока обработки информации.
В следующем тестовом режиме стационарного блока 42 управления осуществляется изменение параметров моделирования блока 56 моделирования на основании параметров процесса в рельсовом транспортном средстве 10. Этот тестовый режим может служить, в частности, для того, чтобы автоматически регистрировать изменения, которые были выполнены на рельсовом транспортном средстве 10, и учитывать их в блоке 56 моделирования. К примеру, принимается тот факт, что в рельсовом транспортном средстве 10 вентиляционный блок с определённой номинальной мощностью был заменён другим вентиляционным блоком с другой номинальной мощностью. Инициированный посредством стационарного блока 42 управления процесс в транспортном средстве регистрирует, к примеру, в виде тестового режима вентиляционного блока, номинальную мощность вентиляционного блока. Эти параметры процесса учитываются в блоке 56 моделирования, который после сравнения с имеющимся значением, сохраняет в памяти новое значение. Это новое значение используется затем при моделировании работы вентиляционного блока. Этот тестовый режим может далее служить для того, чтобы учитывать в блоке 56 моделирования изменение значения, которое выявляется на основании работы вентиляционного блока со сбоями.
В следующем тестовом режиме изменение параметров моделирования блока 56 моделирования на основании параметров процесса в рельсовом транспортном средстве 10 может включать в себя согласование параметров в наборе 74 данных, которые относятся к автоматизированной системе 70 проектирования. Если, к примеру, в рельсовое транспортное средство 10 встраивается новый конструктивный элемент, то он может быть зарегистрирован посредством процесса в рельсовом транспортном средстве 10. Соответствующие параметры процесса, которые формируются при этом, анализируются посредством стационарного блока 42 управления, который инициирует автоматическую актуализацию соответствующей библиотеки конструктивных элементов автоматизированной системы 70 проектирования и/или автоматическое согласование параметров схемы соединений.
В следующем тестовом режиме стационарного блока 42 управления осуществляется, по меньшей мере, частичное воздействие на процесс в транспортном средстве 10, на основании параметров моделирования процесса моделирования блока 56 моделирования. В этом режиме процесс в транспортном средстве может быть запущен посредством стационарного блока 42 управления. Это происходит на основании параметров моделирования, которые служат в качестве обслуживающих параметров для процесса в транспортном средстве. В особом примере функционирование системы кондиционирования рельсового транспортного средства 10 должно быть протестировано, причём это функционирование соответствует регулированию мощности кондиционирования, в зависимости от концентрации CO. Такая ситуация применения моделируется для определённого значения концентрации в процессе моделирования блока 56 моделирования, который в качестве параметров моделирования формирует входные параметры для процесса в транспортном средстве. Эти данные моделирования используются стационарным блоком 42 управления, чтобы управлять через канал 53 передачи данных работой установки кондиционирования в соответствии с рассматриваемым значением концентрации. Как описано выше, стационарный блок 42 управления имеет программное обеспечение, которое соответствует версии программного обеспечения регулировки системы кондиционирования рельсового транспортного средства 10. Режим работы установки кондиционирования в качестве процесса в транспортном средстве формирует параметры процесса, в частности, параметры с датчиков, которые подвергаются анализу посредством стационарного блока 42 управления и, в частности, сравниваются с параметрами моделирования из процесса моделирования.
В следующем примере должна быть протестирована плоскость возврата системы управления мощностью вспомогательного привода, если отсутствует часть вспомогательной системы обеспечения. Эта ситуация применения моделируется в процессе моделирования блока 56 моделирования, который в качестве параметров моделирования формирует входные параметры для процесса в транспортном средстве. Эти параметры моделирования используются стационарным блоком 42 управления для регулировки соответствующего регулировочного блока реальной системы управления мощностью в рельсовом транспортном средстве 10. Работа системы управления мощностью в качестве процесса в транспортном средстве формирует параметры процесса, в частности, параметры с датчиков, которые подвергаются анализу посредством стационарного блока 42 управления и сравниваются, в частности, с параметрами моделирования из процесса моделирования. Этот пример соответствует случаю введения ошибки, при котором неправильное состояние в подсистеме рельсового транспортного средства 10 создаётся искусственно. В качестве следующего примера введения ошибки возможно моделирование обрыва кабеля.
Что касается ситуации введения ошибки в функционирование тормозной системы, то – как представлено на фиг. 4 – в рельсовое транспортное средство 10 может быть встроен специальный интерфейс 82, который через управляющее соединение F находится в рабочем взаимодействии со стационарным блоком 42 управления. Этот интерфейс 82 соединён с устройством 22 для управления тормозом и с исполнительными механизмами рельсового транспортного средства 10.
Описанный выше, включающий в себя сравнение заданной и фактической величин, тестовый режим стационарного блока 42 управления может быть осуществлён во время прохождения рельсовым транспортным средством 10 участка пути. Как уже пояснено ранее, наличие отклонения может генерировать указание оператору блока 42 управления посредством устройства 46 вывода данных и/или посредством автоматического блока обработки информации. В зависимости от величины отклонения могут быть предприняты различные меры, как то уведомление обслуживающего персонала или автоматическое сохранение результата для дальнейшего анализа. Определённые, существенные отклонения могут выявляться при состояниях рельсового транспортного средства 10, которые в соответствии с нормативами защиты персонала являются небезопасными. Соотнесение определённых отклонений с такими небезопасными состояниями заложено в стационарном блоке 42 управления. При распознавании небезопасного, с точки зрения защиты персонала, состояния рельсового транспортного средства 10 посредством стационарного блока 42 управления инициируются мероприятия для приведения рельсового транспортного средства 10 в безопасное состояние. Если безопасное состояние не может быть достигнуто посредством устранения распознанной ошибки, то в качестве меры может быть инициировано экстренное торможение рельсового транспортного средства 10.
Реферат
Изобретение относится к области железнодорожной автоматики и телемеханики. Устройство для осуществления процесса тестирования рельсового транспортного средства со стационарным блоком управления, с блоком моделирования и с интерфейсом данных, которые расположены в стационарном месте, причём стационарный блок управления для передачи данных находится в рабочем взаимодействии с блоком моделирования и предназначен для того, чтобы через интерфейс данных формировать канал передачи данных с рельсовым транспортным средством и осуществлять процесс тестирования на основании обмена данными с рельсовым транспортным средством и с блоком моделирования. Достигается повышение надежности тестирования рельсового транспортного средства. 2 н. и 13 з.п. ф-лы, 4 ил.
Комментарии