Устройство и способ для оценки состояния трения поверхности земли, с которой транспортное средство находится в контакте - RU2468945C1
Код документа: RU2468945C1
Чертежи















































Описание
Область техники
Изобретение относится к устройству или устройству и способу для оценки состояния трения на поверхности контакта между колесом транспортного средства и землей или состояния сцепления с поверхностью дороги колеса транспортного средства или допустимого запаса относительно предела по трению.
Уровень техники
В качестве предшествующей технологии данного типа, предусмотрена система, выполненная с возможностью иллюстрирования точки, соответствующей фактической скорости скольжения колеса и коэффициенту трения поверхности дороги в двумерной карте, имеющей горизонтальную ось, представляющую скорость степени скольжения колеса, и вертикальную ось, представляющую коэффициент трения поверхности дороги, и оценки состояния трения шин из наклона прямой линии, проходящей через точку на графике и начало координат (см. JP 2006-34012 A: далее - Патентный Документ 1). В соответствии с оцененным состоянием трения шин, эта система управляет продольной силой или движущей/тормозной силой колеса.
Сущность изобретения
Тем не менее, система согласно предшествующей технологии Патентного Документа 1 не может выяснять предел по трению шины и, следовательно, не может определять допустимый запас для предела по трению шины. Задачей настоящего изобретения является обеспечение оценки состояния сцепления и допустимого запаса для предела по трению более надлежащим образом.
Для устранения указанной проблемы, согласно настоящему изобретению, модуль первого ввода задает первый ввод, который является соотношением первой силы на колесе, действующей на колесо транспортного средства на поверхности контакта земли в первом направлении, и первой степени скольжения колеса для колеса транспортного средства. Модуль второго ввода задает второй ввод, который является соотношением второй силы на колесе, действующей на колесо транспортного средства на поверхности контакта земли во втором направлении, отличном от первого направления, и второй степени скольжения колеса для колеса транспортного средства. В соответствии с вводами, заданными посредством модулей первого и второго ввода, модуль вывода определяет вывод, который является параметром характеристики сцепления, указывающим характеристику сцепления колеса транспортного средства.
Краткое описание чертежей
Фиг.1 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, характерным видом, показывающим характеристическую кривую шины (характеристическую кривую Fx-λ) между скоростью λ скольжения колеса транспортного средства и продольной силой Fx колеса транспортного средства.
Фиг.2 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, характерным видом, показывающим характеристические кривые шины (характеристические кривые Fx-λ) и круги трения для различных значений μ поверхности дороги.
Фиг.3 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, характерным видом, показывающим наклон касательной или наклон касательной каждой из характеристических кривых шины (характеристических кривых Fx-λ) различных μ-значений поверхности дороги в точке пересечения с прямой линией, проходящей через начало координат характеристической кривой шины.
Фиг.4 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, другим характерным видом, показывающим наклон касательной каждой из характеристических кривых шины для различных μ-значений поверхности дороги в точке пересечения с прямой линией, проходящей через начало координат характеристической кривой шины.
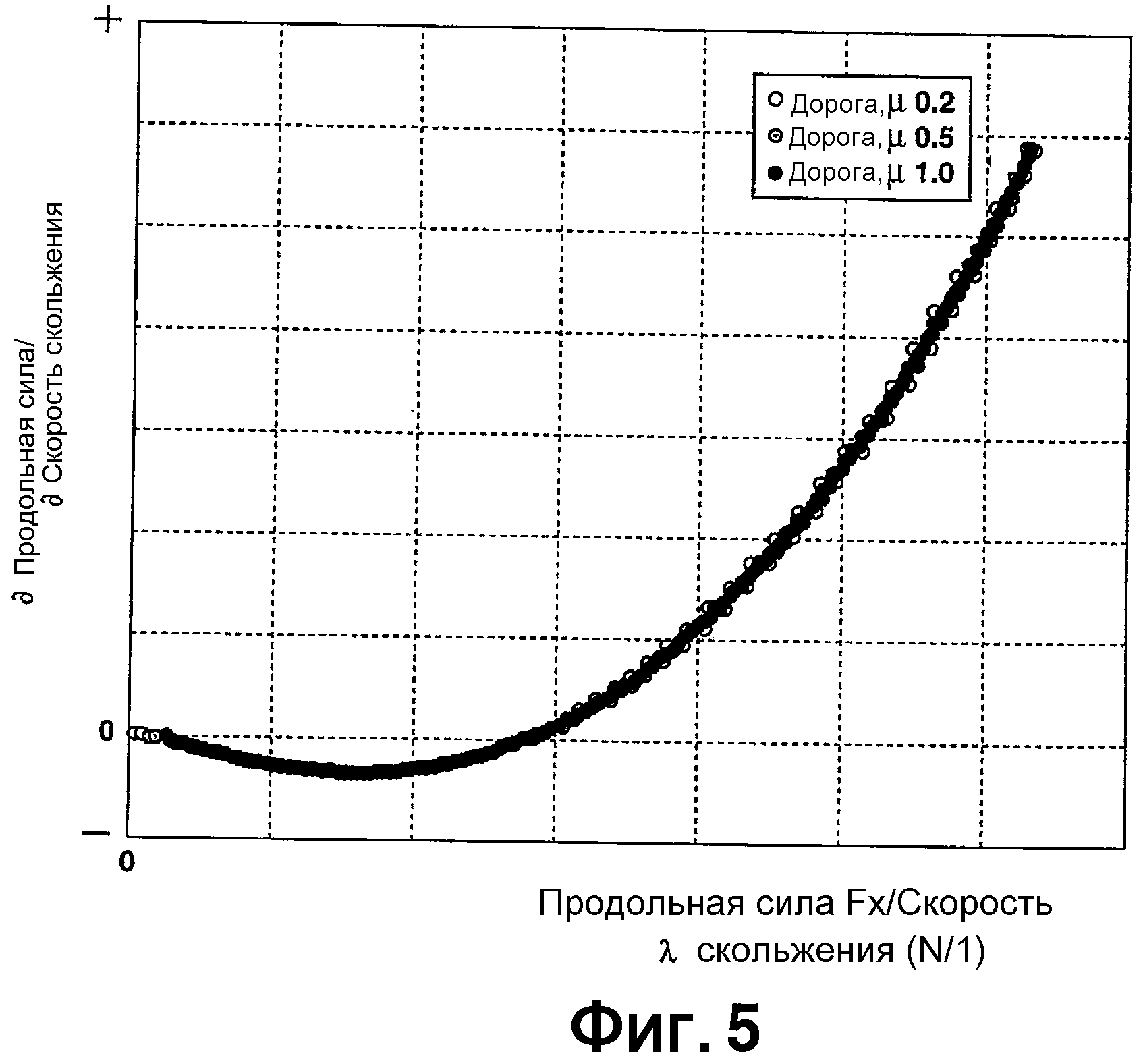
Фиг.5 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, видом, показывающим характеристику, состоящую из набора точек на графике между соотношением (Fx/λ) продольной силы Fx и скорости λ скольжения, представляющим точку пересечения произвольной прямой линии и характеристической кривой шины (характеристической кривой Fx-λ), и наклоном касательной (μ-градиентом) характеристической кривой шины в точке пересечения.
Фиг.6 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, характерным видом, показывающим характеристическую кривую (характеристическую кривую сцепления, двумерную характеристическую карту μ-градиента), полученную из точек на графике по фиг.5.
Фиг.7 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, видом, используемым для пояснения процесса определения наклона касательной (μ-градиента) характеристической кривой шины (характеристической кривой Fx-λ) из продольной силы Fx и скорости λ скольжения.
Фиг.8 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, видом для показа соотношения между характеристической кривой (двумерной характеристической картой μ-градиента), характеристической кривой шины (характеристической кривой Fx-λ) и кругом трения.
Фиг.9 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, характерным видом, показывающим взаимосвязь между соотношением (Fx/λ) продольной силы Fx и скорости λ скольжения и наклоном касательной (μ-градиентом) к характеристической кривой шины, полученной, когда нагрузка на колесо варьируется.
Фиг.10 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, характерным видом, показывающим характеристическую кривую шины (характеристическую кривую Fy-βt) между углом βt скольжения колеса транспортного средства и поперечной силой Fy колеса транспортного средства.
Фиг.11 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, характерным видом, показывающим характеристические кривые шины (характеристические кривые Fy-βt) и круги трения для различных значений μ поверхности дороги.
Фиг.12 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, характерным видом, показывающим наклоны касательной характеристических кривых шины (характеристических кривых Fy-βt) различных μ-значений поверхности дороги в точках пересечения с прямой линией, проходящей через начало координат характеристической кривой шины.
Фиг.13 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, другим характерным видом, показывающим наклон касательной каждой из характеристических кривых шины (характеристических кривых Fy-βt) различных μ-значений поверхности дороги в точке пересечения с прямой линией, проходящей через начало координат характеристической кривой шины.
Фиг.14 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, характерным видом, показывающим взаимосвязь (характеристическую кривую сцепления, двумерную характеристическую карту μ-градиента) между соотношением (Fy/βt) поперечной силы Fy и угла βt скольжения, представляющим точку пересечения произвольной прямой линии и характеристической кривой шины (характеристической кривой Fy-βt), и наклоном касательной (μ-градиентом) характеристической кривой шины в точке пересечения.
Фиг.15 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, видом, используемым для пояснения процесса определения наклона касательной характеристической кривой шины (характеристической кривой Fy-βt) из поперечной силы Fy и угла βt скольжения.
Фиг.16 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, видом для показа соотношения между характеристической кривой (характеристической картой μ-градиента), характеристической кривой шины (характеристической кривой Fy-βt) и кругом трения.
Фиг.17 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, характерным видом, показывающим взаимосвязь между соотношением (Fy/βt) поперечной силы Fy и угла βt скольжения и наклоном касательной (μ-градиентом) к характеристической кривой шины (характеристической кривой Fy-βt), полученной, когда нагрузка на колесо варьируется.
Фиг.18 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, характерным видом, показывающим круг трения на ортогональной координатной плоскости, представляющей движущую/тормозную силу (продольную силу) Fx вдоль первой оси и поперечную силу Fy вдоль второй оси.
Фиг.19 является видом, используемым для иллюстрации процесса показа взаимосвязи между продольной силой Fx и скоростью λ скольжения в трехмерной системе координат в базовой технологии, и характерным видом для показа взаимосвязи между продольной силой Fx и скоростью λ скольжения.
Фиг.20 является видом, используемым для иллюстрации процесса показа взаимосвязи между поперечной силой Fy и углом βt скольжения в трехмерной системе координат в базовой технологии, и характерным видом для показа взаимосвязи между поперечной силой Fy и углом βt скольжения.
Фиг.21 является видом, используемым для иллюстрации процесса показа взаимосвязи между силой на колесе (продольной силой Fx, поперечной силой Fy) и степенью скольжения (скоростью λ скольжения, углом βt скольжения) в трехмерной системе координат в базовой технологии, и характерным видом, показывающим взаимосвязь между силой на колесе (продольной силой Fx, поперечной силой Fy) и степенью скольжения (скоростью λ скольжения, углом βt скольжения) в форме трехмерной искривленной поверхности.
Фиг.22 является видом, используемым для иллюстрации базовой технологии. Фиг.22A является характерным видом, показывающим линию пересечения между трехмерной искривленной поверхностью, представляющей взаимосвязь между степенью скольжения и силой на колесе, и плоскостью, содержащей вектор равнодействующей или комбинированной силы F из продольной силы Fx и поперечной силы Fy и ось Z. Фиг.22B является характерным видом, показывающим характеристическую кривую шины (характеристическую кривую F-Z), представляющую взаимосвязь между равнодействующей силой F и степенью Z скольжения вследствие равнодействующей силы F.
Фиг.23 является видом, используемым для иллюстрации базовой технологии. Фиг.23A является характерным видом для показа кругов трения шины различных размеров в трехмерной системе координат. Фиг.23B является характерным видом, показывающим варьирование характеристической кривой шины (характеристической кривой F-Z) вследствие разности в абсолютной величине наибольшей силы трения, определяющей размер круга трения.
Фиг.24 является видом, используемым для иллюстрации базовой технологии. Фиг.24A является характерным видом трехмерной системы координат для показа того, что наклон в точке пересечения между характеристической кривой шины и прямой линией, проходящей через начало O координат (точке, в которой степень скольжения и сила на колесе равны нулю), является константой безотносительно абсолютной величины наибольшей силы трения. Фиг.24B является характерным видом двумерной системы координат для показа того, что наклон в точке пересечения между характеристической кривой шины и прямой линией, проходящей через начало O координат, является константой безотносительно абсолютной величины наибольшей силы трения.
Фиг.25 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, характерным видом, показывающим взаимосвязь (двумерную характеристическую карту μ-градиента) между соотношением (F/Z) равнодействующей силы F и степени Z скольжения и наклоном γ касательной к характеристической кривой шины (характеристической кривой F-Z).
Фиг.26 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, характерным видом, показывающим взаимосвязь между наклоном γ касательной к одной из множества характеристических кривых шины (характеристических кривых F-Z), существующих в зависимости от направления равнодействующей силы F, и соотношением равнодействующей силы F и степени Z скольжения.
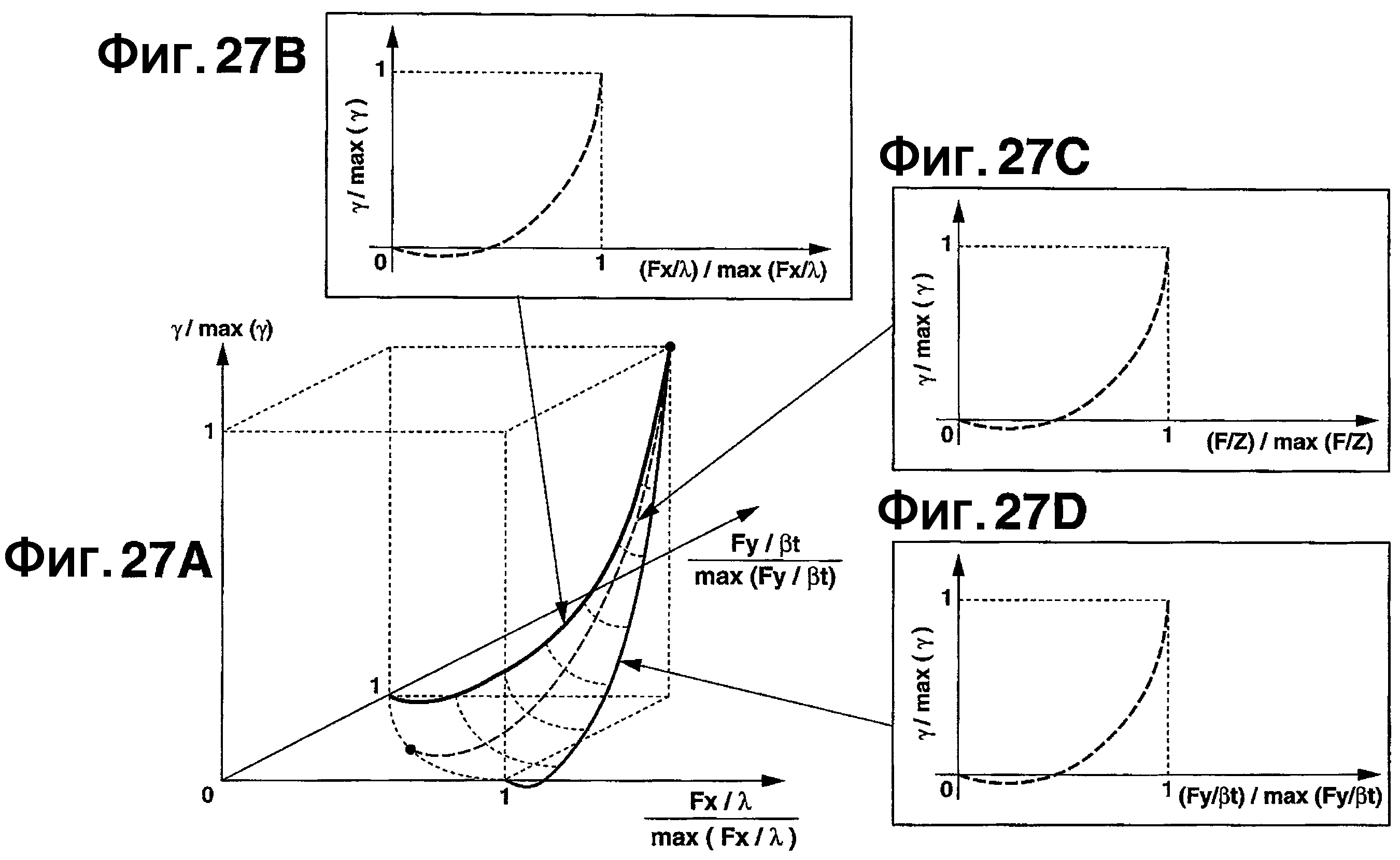
Фиг.27 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, характерным видом для иллюстрации процесса показа множества взаимосвязей (двумерных характеристических карт μ-градиента) по фиг.26 совместно в трехмерной системе координат.
Фиг.28 является видом, используемым для иллюстрации базовой технологии, и, более конкретно, характерным видом, показывающим max(F/Z) и max(γ).
Фиг.29 является характерным видом, показывающим взаимосвязь между соотношением (F/Z) равнодействующей силы F и степени Z скольжения и наклоном γ касательной к характеристической кривой шины (характеристической кривой F-Z), в форме трехмерной искривленной поверхности (трехмерной характеристической карты μ-градиента).
Фиг.30 является схематичным видом, показывающим общую конструкцию электромобиля согласно первому варианту осуществления настоящего изобретения схематично.
Фиг.31 является блок-схемой, показывающей пример конструкции устройства оценки состояния движения транспортного средства.
Фиг.32 является блок-схемой, показывающей пример конструкции модуля оценки угла скольжения шин.
Фиг.33 является видом, используемым для пояснения сил поля, действующих на кузов транспортного средства в движении при повороте.
Фиг.34 является видом, используемым для пояснения сил поля, действующих на кузове транспортного средства в движении при повороте.
Фиг.35 является характерным видом, используемым для пояснения схемы управления для задания усиления компенсации.
Фиг.36 является видом, используемым для пояснения линейной двухколесной модели транспортного средства.
Фиг.37 является характерным видом, показывающим соотношение между вводом (Fx/λ, Fy/βt) и выводом (μ-градиентом γ) трехмерной характеристической карты μ-градиента.
Фиг.38 является блок-схемой последовательности операций способа, показывающей процесс модуля вычисления команд коррекции продольной силы на основе продольного компонента μ-градиента.
Фиг.39 является блок-схемой последовательности операций способа, показывающей процесс модуля вычисления характеристик поворачиваемости на основе поперечного компонента μ-градиента.
Фиг.40 является блок-схемой последовательности операций способа, показывающей процесс модуля вычисления команд помощи при повороте на основе статического допустимого запаса SM.
Фиг.41 является блок-схемой последовательности операций способа, показывающей процесс вычисления устройства оценки состояния движения транспортного средства.
Фиг.42 является характерным видом, показывающим взаимосвязь между соотношением (F/Z) равнодействующей силы F и степени Z скольжения и наклоном касательной характеристической кривой шины (μ-градиентом) в случае, если нагрузка на колесо варьируется.
Фиг.43 является характерным видом, показывающим взаимосвязь между нагрузкой на колесо и усилением Kw модификации.
Фиг.44 является блок-схемой, показывающей другой пример конструкции устройства оценки состояния движения транспортного средства в первом варианте осуществления.
Фиг.45 является характерным видом, показывающим трехмерную характеристическую карту μ-градиента, варьируемую в зависимости от нагрузки на колесо.
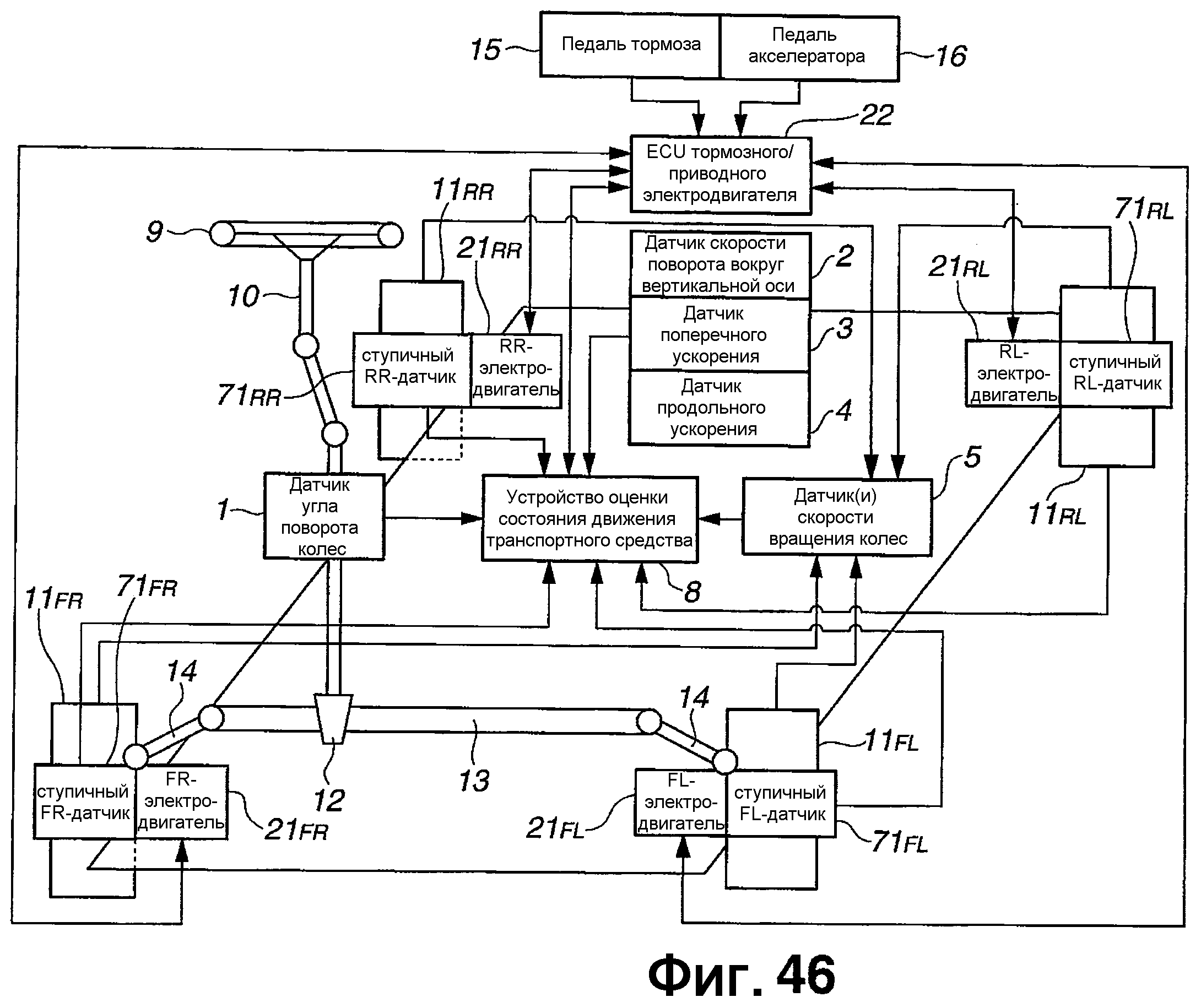
Фиг.46 является схематичным видом, показывающим общую конструкцию электромобиля согласно второму варианту осуществления настоящего изобретения.
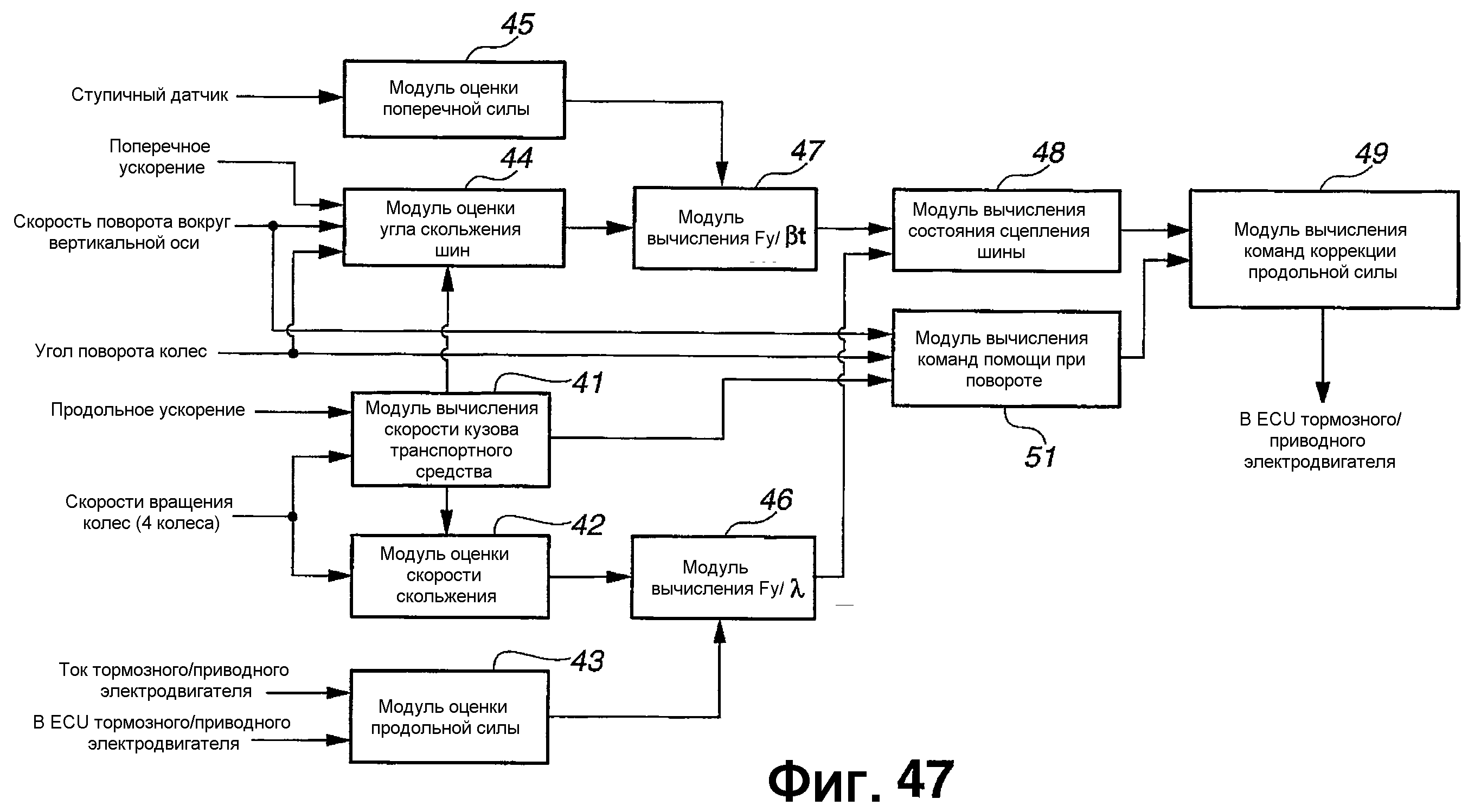
Фиг.47 является блок-схемой, показывающей пример конструкции устройства оценки состояния движения транспортного средства согласно второму варианту осуществления.
Фиг.48 является блок-схемой, показывающей пример конструкции модуля оценки угла скольжения шин согласно второму варианту осуществления.
Фиг.49 является блок-схемой последовательности операций способа, показывающей процесс, на основе μ-градиента, модуля вычисления команд коррекции продольной силы согласно второму варианту осуществления.
Фиг.50 является блок-схемой последовательности операций способа, показывающей процесс управления поворотом модуля вычисления команд коррекции продольной силы и модуля вычисления команд помощи при повороте согласно второму варианту осуществления.
Фиг.51 является блок-схемой последовательности операций способа, показывающей процесс вычисления устройства оценки состояния движения транспортного средства согласно второму варианту осуществления.
Наилучшие способы осуществления изобретения
Далее приводится пояснение относительно вариантов осуществления настоящего изобретения со ссылкой на чертежи.
Технология, лежащая в основе варианта(ов) осуществления
Сначала, пояснение направлено на технологию, на которой основан вариант осуществления.
(1) Соотношение между скоростью скольжения колеса и продольной силой колеса
Фиг.1 показывает характеристическую кривую шины, которая представляет общую взаимосвязь между скоростью или коэффициентом λ скольжения ведущих колес и продольной силой на ведущем колесе (или движущей/тормозной силой) Fx. Например, характеристическая кривая шины получается посредством использования модели шины, такой как MagicFormula. Продольная сила Fx является силой, действующей от шины к поверхности земли. Продольная сила Fx соответствует силе на колесе, действующей на колесо на поверхности контакта земли, а скорость λ скольжения колеса соответствует степени скольжения колеса или степени проскальзывания.
Как показано на фиг.1, на характеристической кривой шины, взаимосвязь между скоростью λ скольжения и продольной силой Fx изменяется с линейной на нелинейную по мере того, как абсолютное значение скорости λ скольжения увеличивается. Таким образом, взаимосвязь между скоростью λ скольжения и продольной силой Fx является линейной, когда скорость λ скольжения находится в заданном диапазоне от нуля. Взаимосвязь между скоростью λ скольжения и продольной силой Fx становится нелинейной, когда скорость λ скольжения (абсолютное значение) увеличивается до некоторой степени. Таким образом, характеристическая кривая шины включает в себя линейный сегмент и нелинейный сегмент.
В нелинейной области в примере с фиг.1, скорость увеличения продольной силы Fx относительно коэффициента λ скольжения становится меньшей около положения, в котором скорость λ скольжения равна 0,1. Около коэффициента λ скольжения в 0,15, продольная сила Fx достигает наибольшего значения. После этого, продольная сила Fx уменьшается по мере того, как коэффициент λ скольжения увеличивается. Такое соотношение является очевидным, когда внимание направлено на наклон или градиент касательной линии к характеристической кривой шины.
Наклон касательной линии к характеристической кривой шины может быть выражен посредством соотношения изменения в скорости λ скольжения и изменения в продольной силе Fx, которое является коэффициентом при частной производной продольной силы Fx относительно скорости λ скольжения. Наклон касательной к характеристической кривой шины может рассматриваться как наклон касательной линии к характеристике шины в точке пересечения (помеченной посредством ○ на фиг.1) между характеристической кривой шины и произвольной прямой линией a, b, c, d, …, пересекающий характеристическую кривую шины. Можно оценивать состояние трения шины, если положение на такой характеристической кривой шины может быть определено, т.е. если известны скорость λ скольжения и продольная сила Fx. Когда, например, позиция находится в точке x0, которая находится в нелинейной области на характеристической кривой шины, но которая находится близко к линейной области, как показано на фиг.1, то можно оценивать то, что состояние трения шин является стабильным. Из определения того, что состояние трения шин является стабильным, можно оценивать то, что шина по-прежнему находится на уровне, допускающем достижение ее рабочих характеристик надлежащим образом, или транспортное средство находится в стабильном состоянии.
Фиг.2 показывает характеристические кривые шины и круги трения для различных μ-значений поверхности дороги. Фиг.2A показывает характеристические кривые шины для различных μ-значений поверхности дороги, а фиг.2B-2D показывают круги трения для различных μ-значений поверхности дороги. μ поверхности дороги равно 0,2, 0,5 или 1,0 в этом примере. Как показано на фиг.2A, характеристические кривые шины для различных значений коэффициента μ трения поверхности дороги имеют тенденции, качественно аналогичные друг другу. Как показано на фиг.2B-2D, круг трения становится меньшим по мере того, как μ поверхности дороги становится ниже. Таким образом, чем ниже коэффициент μ трения поверхности дороги, тем меньше продольная сила, которая может реализовываться посредством шины. Таким образом, характеристика шины имеет форму характеристики, включающей в себя, в качестве параметра, коэффициент трения поверхности дороги (μ поверхности дороги). Как показано на фиг.2, в зависимости от значения коэффициента трения поверхности дороги, можно получать характеристическую кривую шины для низкого трения, характеристическую кривую шины для среднего трения и характеристическую кривую шины для высокого трения и т.д.
Фиг.3 показывает взаимосвязи между характеристическими кривыми шины для различных μ-значений поверхности дороги и произвольными прямыми линиями a b, c и d, проходящими через начало координат. Как показано на фиг.3, таким же образом, как на фиг.1, наклон касательной к каждой из характеристических кривых шины для различных μ-значений поверхности дороги определяется в точке пересечения характеристической кривой шины и каждой прямой линии b, c или d. Другими словами, соответствующие наклоны касательных к характеристическим кривым шины для различных μ-значений поверхности дороги определяются в соответствующих точках пересечения с прямой линией b. Соответствующие наклоны касательных к характеристическим кривым шины для различных μ-значений поверхности дороги определяются в соответствующих точках пересечения с прямой линией c. Соответствующие наклоны касательных к характеристическим кривым шины для различных μ-значений поверхности дороги определяются в соответствующих точках пересечения с прямой линией d. Посредством определения наклонов касательных к характеристическим кривым шины таким образом, можно получать такой результат, что наклоны касательных к характеристическим кривым шины на пересечениях одной прямой линии равны друг другу.
На фиг.4 внимание обращается на прямую линию c, показанную на фиг.3, в качестве примера. Как показано на фиг.4, наклоны касательных к характеристическим кривым шины для различных μ-значений поверхности дороги в точках пересечения с прямой линией c равны друг другу. Другими словами, соотношение (Fx1/λ1) продольной силы Fx1 и скорости λ1 скольжения, определяющее точку пересечения x1 с характеристической кривой шины μ=0,2 поверхности дороги, соотношение (Fx2/λ2) продольной силы Fx2 и коэффициента λ2 скольжения, определяющее точку пересечения x2 с характеристической кривой шины μ=0,5 поверхности дороги, и соотношение (Fx3/λ3) продольной силы Fx3 и скорости λ3 скольжения, определяющее точку пересечения x3 с характеристической кривой шины μ=1,0 поверхности дороги, равны одному значению. Наклоны характеристических кривых шины для различных μ-значений поверхности дороги равны друг другу в этих точках пересечения x1, x2 и x3.
Фиг.5 показывает взаимосвязь соотношения (Fx/λ) продольной силы Fx к скорости λ скольжения, выражающего точку пересечения между произвольной прямой линией и характеристической кривой шины, и наклона касательной (∂ продольная сила/∂ скорость скольжения) характеристической кривой шины в точке пересечения. На фиг.5 иллюстрируются значения, полученные при различных μ-значениях поверхности дороги (μ=0,2, 0,5 и 1,0, в этом примере). Как показано на фиг.5 безотносительно μ поверхности дороги, имеется постоянная взаимосвязь между соотношением (Fx/λ) продольной силы Fx к скорости λ скольжения и наклоном касательной характеристической кривой шины.
Фиг.6 показывает характеристическую кривую, полученную из точек на графике по фиг.5. Как показано на фиг.6, эта характеристическая кривая показывает то, что соотношение (Fx/λ) продольной силы Fx к скорости λ скольжения и наклона касательной характеристической кривой шины связаны друг с другом посредством постоянного соотношения безотносительно μ поверхности дороги. Следовательно, характеристическая кривая по фиг.6 является допустимой и надлежащей даже на поверхностях дороги с различными значениями коэффициента μ трения, таких как сухая асфальтированная поверхность дороги и обледеневшая поверхность дороги. Таким образом, характеристическая кривая шины, показанная на фиг.6, включает в себя характеристическую кривую шины в случае высокого трения для поверхности дороги с высоким трением, имеющей более высокий коэффициент трения, и характеристическую кривую шины в случае низкого трения для поверхности дороги с низким трением, имеющей более низкий коэффициент трения, ниже более высокого коэффициента трения. Эта характеристическая кривая шины отличается тем, что на наклон не оказывает влияние μ поверхности дороги. Таким образом, эта характеристическая кривая отличается тем, что наклон может быть определен без необходимости получения или оценки информации по состоянию поверхности дороги. Характеристическая кривая шины по фиг.6 представляет характеристическую кривую шины, аналогично фиг.1. Тем не менее, характеристическая кривая шины по фиг.6 может упоминаться как характеристическая кривая сцепления, например, в отличие от фиг.1.
На характеристической кривой по фиг.6, наклон касательной характеристической кривой шины является отрицательным в области (области меньшего соотношения), в которой соотношение (Fx/λ) продольной силы Fx и скорости λ скольжения является небольшим. В этой области по мере того, как соотношение (Fx/λ) становится больше, наклон касательной характеристической кривой шины (соответствующий параметру характеристики сцепления) сначала уменьшается, а затем начинает увеличиваться. Отрицательный наклон касательной характеристической кривой шины означает, что коэффициент при частной производной продольной силы относительно скорости скольжения является отрицательным.
В области (области большего соотношения), в которой соотношение (Fx/λ) продольной силы Fx и скорости λ скольжения больше, наклон касательной характеристической кривой шины является положительным. В этой области наклон касательной характеристической кривой шины увеличивается по мере того, как соотношение (Fx/λ) становится больше. В области, в которой соотношение (Fx/λ) продольной силы Fx и скорости λ скольжения большое, характеристическая кривая по фиг.6 имеет форму монотонно возрастающей функции.
Положительный наклон касательной характеристической кривой шины означает, что коэффициент при частной производной продольной силы относительно скорости скольжения является положительным. Кроме того, наибольшее значение наклона касательной характеристической кривой шины означает, что наклон касательной является наклоном линейной области характеристической кривой шины. В линейной области наклон касательной характеристической кривой шины является константой безотносительно соотношения продольной силы Fx и скорости λ скольжения.
Наклон касательной полученной таким образом характеристической кривой шины является параметром характеристики сцепления, переменной, представляющей состояние сцепления шины, или параметром, представляющим состояние насыщения силы на шине, которая может формироваться посредством шины в поперечном направлении. В частности, этот параметр представляет следующие тенденции. В случае положительной области продольная сила Fx дополнительно может увеличиваться посредством увеличения скорости λ скольжения. В случае нулевой или отрицательной области, даже если скорость λ скольжения увеличивается, продольная сила Fx не увеличивается, но продольная сила Fx может уменьшаться.
Характеристическая кривая сцепления (см. фиг.6) может получаться посредством выполнения дифференцирования по частям для характеристической кривой шины (см. фиг.1) и непрерывного отслеживания.
Как упомянуто выше, было обнаружено, что, относительно характеристических кривых шины для различных μ-значений поверхности дороги, наклоны касательных становятся равными друг другу в точках пересечения, каждая из которых является точкой пересечения между данной прямой линией, проходящей через начало координат каждой характеристической кривой, и характеристической кривой шины. Затем, авторы настоящей заявки пришли к выводу, что взаимосвязь между соотношением Fx/λ продольной силы Fx к скорости λ скольжения и наклоном касательной характеристических кривых шины может быть выражена посредством характеристической кривой (характеристической кривой сцепления) (см. фиг.6) безотносительно μ поверхности дороги. С помощью этой характеристической кривой, можно получать информацию по состоянию трения шины, если продольная сила Fx и скорость λ скольжения известны, без необходимости информации μ поверхности дороги. Процесс получения информации по состоянию трения шины поясняется в отношении фиг.7.
Сначала, продольная сила Fx и скорость λ скольжения считываются. Затем, посредством использования характеристической кривой, показанной на фиг.7A (аналогичной характеристической кривой по фиг.6), можно определять наклон касательной характеристической кривой шины, соответствующей считываемой продольной силе Fx и скорости λ скольжения (согласно Fx/λ). Например, как показано на фиг.7A, получаются наклоны Id1, Id2, Id3, Id4 и Id5 касательной характеристической кривой шины. Из этих наклонов касательной характеристической кривой шины, можно определять положения на характеристической кривой шины μ поверхности дороги, как показано на фиг.7B. Например, можно указывать положения Xid1, Xid2, Xid3, Xid4 и Xid5, соответствующие наклонам Id1, Id2, Id3, Id4 и Id5 касательной характеристической кривой шины. Положение на характеристической кривой шины представляет состояние трения и возможности шины при μ поверхности дороги, при которой характеристическая кривая шины является допустимой. Соответственно, можно знать состояние трения шины и возможности (такие как возможности сцепления) шины посредством определения положения на характеристической кривой шины, как показано на фиг.7B, при μ поверхности дороги характеристической кривой шины. Когда, например, наклон касательной характеристической кривой шины является отрицательным или близким к нулю (например, Id4 или Id5), можно определять, из положения (например, Xid4 или Xid5), определенного из наклона касательной, что сила сцепления шины находится в предельной области или критической области. Как результат, даже когда сила сцепления колеса находится в предельной области, можно оценивать допустимый запас для предела по трению силы сцепления шины надлежащим образом.
Посредством этого процесса, если продольная сила Fx и скорость λ скольжения известны, можно определять состояние трения и возможности шины при μ поверхности дороги, при которой продольная сила Fx и скорость λ скольжения получаются посредством использования характеристической кривой (характеристической кривой сцепления).
Фиг.8 показывает связь с кругом трения. Фиг.8A показывает взаимосвязь между соотношением (Fx/λ) между продольной силой Fx и скоростью λ скольжения и наклоном касательной характеристической кривой шины (аналогично фиг.6). Фиг.8B показывает характеристическую кривую шины, а фиг.8(C) показывает круг трения. В этих взаимосвязях, сначала получается наклон Id касательной характеристической кривой шины, соответствующий продольной силе Fx и скорости λ скольжения (соответствующий Fx/λ) (см. фиг.8A). Соответственно, положение на характеристической кривой шины может быть определено (см. фиг.8B). Кроме того, относительное значение продольной силы в круге трения может быть определено. Таким образом, можно определять допустимый запас M для продольной силы, который может реализовываться посредством шины. Наклон касательной характеристической кривой шины представляет скорость изменения продольной силы Fx относительно изменения в скорости λ скольжения. Следовательно, значение, вдоль вертикальной оси, характеристической кривой, показанной на фиг.8A (наклон касательной характеристической кривой шины), может рассматриваться как величина, указывающая скорость варьирования поведения транспортного средства.
Кроме того, выявлена взаимосвязь между соотношением (Fx/λ) продольной силы Fx и скоростью λ скольжения и наклоном касательной характеристической кривой шины, когда нагрузка на колесо варьируется, посредством процесса, аналогичного вышеуказанному процессу. На фиг.9 показано это соотношение. В этом примере, нагрузка на колесо варьируется посредством умножения первоначального значения Fz нагрузки на колесо (значения нагрузки на колесо, полученного, когда нет варьирования) на 0,6, 0,8 и 1,2. В случае умножения на 1,0, нагрузка на колесо равна первоначальному значению Fz. Когда нагрузка на колесо шины становится меньшей, наклон касательной характеристической кривой шины, полученный посредством каждого значения нагрузки на колесо, становится меньшим, как показано на фиг.9. В этом случае, наибольшее значение наклона касательной характеристической кривой шины, полученное посредством каждого значения нагрузки на колесо (значения линейной области), перемещается на прямой линии, проходящей начало координат характеристического вида. Кроме того, характеристическая кривая, представляющая взаимосвязь между соотношением (Fx/λ) продольной силы Fx и скорости λ скольжения и наклоном касательной характеристической кривой шины (наклоном касательной к характеристической кривой шины), варьируется по размеру, при этом форма сохраняется, так что формы являются аналогичными похожим чертежам, имеющим различные размеры. Было также обнаружено такое соотношение с нагрузкой на колесо.
(2) Соотношение между углом скольжения колеса и поперечной силой колеса
Фиг.10 показывает характеристическую кривую шины, которая представляет общую взаимосвязь между углом βt скольжения колеса и поперечной силой Fy колеса. Например, посредством настройки модели шины в соответствии с экспериментальными данными, можно получать эквивалентную характерную диаграмму (характеристическую кривую шины) для двух колес, соответствующих передним и задним колесам. Модель шины составляется на основе, например, MagicFomula. Поперечная сила Fy является величиной, представленной посредством силы, возникающей при повороте, и боковой силы. Поперечная сила Fy является силой, действующей от шины к поверхности земли. Поперечная сила Fy соответствует силе на колесе, действующей на колесо на поверхности контакта земли, а угол βt скольжения колеса соответствует степени скольжения колеса или степени проскальзывания колес.
Как показано на фиг.10, на характеристической кривой шины, взаимосвязь между углом βt скольжения и поперечной силой Fy изменяется с линейной на нелинейную по мере того, как абсолютное значение угла βt скольжения увеличивается. Таким образом, взаимосвязь между углом βt скольжения и поперечной силой Fy является линейной, когда угол βt скольжения находится в заданном диапазоне от нуля. Взаимосвязь между углом βt скольжения и поперечной силой Fy становится нелинейной, когда угол βt скольжения (абсолютное значение) увеличивается до некоторой степени. Таким образом, характеристическая кривая шины включает в себя линейный сегмент и нелинейный сегмент.
Переход от линейной формы к нелинейной форме является очевидным, когда внимание обращается на наклон (градиент) касательной линии, касательной к характеристической кривой шины. Наклон касательной линии к характеристической кривой шины может быть выражен посредством соотношения изменения в угле βt скольжения и изменения в поперечной силе Fy, которое является коэффициентом при частной производной поперечной силы Fy относительно угла βt скольжения. Наклон касательной к характеристической кривой шины может рассматриваться как наклон касательной линии к характеристике шины в точке пересечения (помеченной посредством ○ на фиг.10) между характеристической кривой шины и произвольной прямой линией a, b, c,..., пересекающий характеристическую кривую шины. Можно оценивать состояние трения шины, если положение на такой характеристической кривой шины определяется, т.е. если угол βt скольжения и поперечная сила Fy известны. Когда, например, местоположение располагается в точке x0, которая находится в нелинейной области на характеристической кривой шины, но которая находится близко к линейной области, как показано на фиг.10, то можно оценивать то, что состояние трения шин является стабильным. Из определения того, что состояние трения шин является стабильным, можно оценивать то, что шина по-прежнему находится на уровне, допускающем достижение ее рабочих характеристик надлежащим образом, или транспортное средство находится в стабильном состоянии.
Фиг.11 показывает характеристические кривые шины и круги трения для различных μ-значений поверхности дороги. Фиг.11A показывает характеристические кривые шины для различных μ-значений поверхности дороги, а фиг.11B, 11C и 11D показывают круги трения для различных μ-значений поверхности дороги. μ поверхности дороги равно 0,2, 0,5 или 1,0 в этом примере. Как показано на фиг.11A, характеристические кривые шины для различных значений коэффициента μ трения поверхности дороги имеют тенденции, качественно аналогичные друг другу. Как показано на фиг.11B-11D, круг трения становится меньшим по мере того, как μ поверхности дороги становится ниже. А именно, чем ниже коэффициент μ трения поверхности дороги, тем меньше поперечная сила, которая может реализовываться посредством шины. Таким образом, характеристика шины является характеристикой, включающей в себя, в качестве параметра, коэффициент трения поверхности дороги (μ поверхности дороги). В зависимости от значений коэффициента трения поверхности дороги, предусмотрены характеристическая кривая шины в случае низкого трения для более низкого трения, характеристическая кривая шины со средним трением для среднего трения и характеристическая кривая шины в случае высокого трения для более высокого трения, как показано на фиг.11.
Фиг.12 показывает взаимосвязи между характеристическими кривыми шины для различных μ-значений поверхности дороги и произвольными прямыми линиями a, b и c, проходящими через начало координат. Как показано на фиг.12, таким же образом, как на фиг.10, наклон касательной к каждой из характеристических кривых шины для различных μ-значений поверхности дороги определяется в точке пересечения характеристической кривой шины и каждой прямой линии a, b или c. Другими словами, соответствующие наклоны касательных к характеристическим кривым шины для различных μ-значений поверхности дороги определяются в соответствующих точках пересечения с прямой линией a. Соответствующие наклоны касательных к характеристическим кривым шины для различных μ-значений поверхности дороги определяются в соответствующих точках пересечения с прямой линией b. Соответствующие наклоны касательных к характеристическим кривым шины для различных μ-значений поверхности дороги определяются в соответствующих точках пересечения с прямой линией c. Посредством определения наклонов касательных к характеристическим кривым шины таким образом, можно получать такой результат, что наклоны касательных к характеристическим кривым шины на пересечениях одной прямой линии равны друг другу.
На фиг.13 внимание обращается на прямую линию c, показанную на фиг.12, в качестве примера. Как показано на фиг.13, наклоны касательных к характеристическим кривым шины для различных μ-значений поверхности дороги в точках пересечения с прямой линией c равны друг другу. Другими словами, соотношение (Fy1/βt1) поперечной силы Fy1 и угла βt1 скольжения, определяющее точку пересечения x1 с характеристической кривой шины при μ=0,2 поверхности дороги, соотношение (Fy2/βt2) поперечной силы Fy2 и угла βt2 скольжения, определяющее точку пересечения x2 с характеристической кривой шины при μ=0,5 поверхности дороги, и соотношение (Fy3/βt3) поперечной силы Fy3 и угла βt3 скольжения, определяющее точку пересечения x3 с характеристической кривой шины при μ=1,0 поверхности дороги, равны одному значению. Характеристические кривые шины для различных μ-значений поверхности дороги имеют идентичный наклон касательной в этих точках пересечения x1, x2 и x3.
На фиг.14 показана взаимосвязь соотношения (Fy/βt) поперечной силы Fy к углу βt скольжения, выражающего точку пересечения между произвольной прямой линией и характеристической кривой шины, и наклона касательной (∂Fy/∂βt) характеристической кривой шины в точке пересечения. Как показано на фиг.14, безотносительно значения μ поверхности дороги (например, μ=0,2, 0,5 или 1,0), имеется постоянная взаимосвязь между соотношением (Fy/βt) поперечной силы Fy к углу βt скольжения и наклоном касательной характеристической кривой шины. Следовательно, характеристическая кривая по фиг.14 является допустимой и надлежащей даже на поверхностях дороги с различными значениями коэффициента μ трения, таких как сухая асфальтированная поверхность дороги и обледеневшая поверхность дороги. Таким образом, характеристическая кривая шины, показанная на фиг.14, включает в себя характеристическую кривую шины в случае высокого трения для поверхности дороги с высоким трением, имеющей более высокий коэффициент трения, и характеристическую кривую шины в случае низкого трения для поверхности дороги с низким трением, имеющей более низкий коэффициент трения, ниже более высокого коэффициента трения. Эта характеристическая кривая шины отличается тем, что на наклон не оказывает влияние μ поверхности дороги. Таким образом, эта характеристическая кривая отличается тем, что наклон может быть определен без необходимости получения или оценки информации по состоянию поверхности дороги. Характеристическая кривая шины по фиг.14 представляет характеристическую кривую шины, аналогично фиг.10. Тем не менее, характеристическая кривая по фиг.14 может упоминаться как характеристическая кривая сцепления, например, в отличие от характеристической кривой шины с фиг.10.
На характеристической кривой с фиг.14, наклон касательной характеристической кривой шины (соответствующий параметру характеристики сцепления) является отрицательным в области (области меньшего соотношения), в которой соотношение (Fy/βt) поперечной силы Fy и угла βt скольжения является небольшим. В этой области по мере того, как соотношение (Fy/βt) становится больше, наклон касательной характеристической кривой шины сначала уменьшается, а затем начинает увеличиваться. Отрицательный наклон касательной характеристической кривой шины означает, что коэффициент при частной производной поперечной силы относительно угла скольжения является отрицательным.
В области (области большего соотношения), в которой соотношение (Fy/βt) поперечной силы Fy и угла βt скольжения больше, наклон касательной характеристической кривой шины становится положительным. В этой области наклон касательной характеристической кривой шины увеличивается по мере того, как соотношение (Fy/βt) становится больше. В области, в которой соотношение (Fy/βt) поперечной силы Fy и угла βt скольжения больше, характеристическая кривая по фиг.14 имеет форму монотонно возрастающей функции.
Положительный наклон касательной характеристической кривой шины означает, что коэффициент при частной производной поперечной силы относительно угла скольжения является положительным. Кроме того, наибольшее значение наклона касательной характеристической кривой шины означает, что наклон касательной является наклоном линейной области характеристической кривой шины. В линейной области наклон касательной характеристической кривой шины является константой безотносительно соотношения поперечной силы Fy и угла βt скольжения.
Наклон касательной полученной таким образом характеристической кривой шины является параметром характеристики сцепления, переменной, представляющей состояние сцепления шины, или параметром, представляющим состояние насыщения силы на шине, которая может формироваться посредством шины в поперечном направлении. В частности, этот параметр представляет следующие тенденции. В случае положительной области поперечная сила Fy (сила, возникающая при повороте) дополнительно может увеличиваться посредством увеличения угла βt скольжения. В случае нулевой или отрицательной области, даже если угол βt скольжения увеличивается, поперечная сила Fy (сила, возникающая при повороте) не увеличивается, но поперечная сила Fy может уменьшаться.
Характеристическая кривая сцепления (см. фиг.14) может получаться посредством выполнения дифференцирования по частям для характеристической кривой шины (см. фиг.10) и непрерывного отслеживания. Как упомянуто выше, было обнаружено, что, относительно характеристических кривых шины для различных μ-значений поверхности дороги, наклоны касательных становятся равными друг другу в точках пересечения между данной прямой линией, проходящей через начало координат, и соответствующими характеристическими кривыми шины. Затем, авторы настоящей заявки пришли к выводу, что взаимосвязь между соотношением Fy/βt поперечной силы Fy к углу βt скольжения и наклоном касательной характеристических кривых шины может быть выражена посредством характеристической кривой (характеристической кривой сцепления) (см. фиг.14) безотносительно μ поверхности дороги. С помощью этой характеристической кривой можно получать информацию по состоянию трения шины из поперечной силы Fy и угла βt скольжения, без необходимости информации μ поверхности дороги. Процесс получения информации по состоянию трения шины поясняется в отношении фиг.15.
Сначала считываются поперечная сила Fy и угол βt скольжения. Затем, посредством использования характеристической кривой, показанной на фиг.15A (аналогичной характеристической кривой с фиг.14), можно определять наклон касательной характеристической кривой шины, соответствующей считываемой поперечной силе Fy и углу βt скольжения (согласно Fy/βt). Например, как показано на фиг.15A, получаются наклоны Id1, Id2, Id3, Id4 и Id5 касательной характеристической кривой шины. Из этих наклонов касательной характеристической кривой шины, можно определять положения на характеристической кривой шины μ поверхности дороги, как показано на фиг.15B. Например, можно указывать положения Xid1, Xid2, Xid3, Xid4 и Xid5, соответствующие наклонам Id1, Id2, Id3, Id4 и Id5 касательной характеристической кривой шины. Положение на характеристической кривой шины представляет состояние трения и возможности шины при μ поверхности дороги, при которой характеристическая кривая шины является допустимой. Соответственно, можно знать состояние трения шины и возможности (такие как возможности сцепления) шины посредством определения положения на характеристической кривой шины, как показано на фиг.15B, при μ поверхности дороги характеристической кривой шины. Когда, например, наклон касательной характеристической кривой шины является отрицательным или близким к нулю (например, Id4 или Id5), можно определять, из положения (Xid4 или Xid5), определенного из наклона касательной, что поперечная сила шины находится в предельной области критической области. Как результат, даже когда сила сцепления колеса находится в предельной области, можно оценивать допустимый запас шины для предела по трению силы сцепления надлежащим образом.
Посредством этого процесса, если поперечная сила Fy и угол βt скольжения известны, можно определять состояние трения и возможности шины при μ поверхности дороги, при которой поперечная сила Fy и угол βt скольжения получаются посредством использования характеристической кривой (характеристической кривой сцепления).
Фиг.16 показывает связь с кругом трения. Фиг.16A показывает взаимосвязь между соотношением (Fy/βt) между поперечной силой Fy и углом βt скольжения и наклоном касательной характеристической кривой шины (аналогично фиг.14). Фиг.16B показывает характеристическую кривую шины, а фиг.16C показывает круг трения. В этих взаимосвязях, сначала получается наклон Id касательной характеристической кривой шины, соответствующий поперечной силе Fy и углу βt скольжения (соответствующий Fy/βt) (фиг.16A). Соответственно, положение на характеристической кривой шины может быть определено (фиг.16B). Кроме того, относительное значение поперечной силы в круге трения может быть определено. Таким образом, можно определять допустимый запас M для поперечной силы, который может реализовываться посредством шины. Наклон касательной характеристической кривой шины представляет скорость изменения поперечной силы Fy относительно изменения в угле βt скольжения. Следовательно, значение, вдоль вертикальной оси, характеристической кривой, показанной на фиг.16A (наклон касательной характеристической кривой шины), может рассматриваться как величина, указывающая скорость варьирования поведения транспортного средства.
Кроме того, взаимосвязь между соотношением (Fy/βt) поперечной силы Fy и угла βt скольжения и наклоном касательной характеристической кривой шины выявлена, когда нагрузка на колесо варьируется, посредством процесса, аналогичного вышеуказанному процессу. Фиг.17 показывает это соотношение. В этом примере, нагрузка на колесо варьируется посредством умножения первоначального значения Fz нагрузки на колесо (значения нагрузки на колесо, полученного, когда нет варьирования) на 0,6, 0,8 и 1,2. В случае умножения на 1,0, нагрузка на колесо равна первоначальному значению Fz. Когда нагрузка на колесо шины становится меньшей, наклон касательной характеристической кривой шины, полученный посредством каждого значения нагрузки на колесо, становится меньшим, как показано на фиг.17. В этом случае, наибольшее значение наклона касательной характеристической кривой шины, полученное посредством каждого значения нагрузки на колесо (значения линейной области), перемещается по прямой линии, проходящей начало координат характеристического вида, показанного на фиг.17. Кроме того, характеристическая кривая, представляющая взаимосвязь между соотношением (Fy/βt) поперечной силы Fy и угла βt скольжения и наклоном касательной характеристической кривой шины (наклоном касательной к характеристической кривой шины), варьируется по размеру, при этом форма сохраняется, так что формы являются аналогичными похожим чертежам, имеющим различные размеры. Было также обнаружено такое соотношение с нагрузкой на колесо.
(3) Соотношение между кругом трения шины и силой на колесе
Фиг.18 показывает круг трения, описанный на ортогональной координатной плоскости, представленной посредством оси X, выражающей продольную силу Fx, и оси Y, выражающей поперечную силу Fy.
Круг трения шины показывает предел по трению, до которого шина может поддерживать состояние трения на поверхности контакта земли. Предел по трению еще не достигается, и шина находится в состоянии, поддерживающем состояние трения, когда значение поперечной силы Fy, продольной Fx или равнодействующей силы, являющейся результатом поперечной силы Fy и продольной силы Fx, находится в рамках круга трения. Когда значение силы равно кругу трения, шина находится в состоянии, формирующем наибольшую силу трения. Когда внешняя сила, применяемая к шине на поверхности контакта шины и земли, превышает круг трения, шина находится в состоянии, в котором состояние трения между шиной и поверхностью земли потеряно, и относительное смещение между шиной и поверхностью земли становится больше, т.е. шина находится в так называемом состоянии проскальзывания. Это означает связь круга трения шины и сил сцепления в продольном и поперечном направлениях, при которой наибольшие силы сцепления не могут достигаться одновременно в продольном и поперечном направлениях.
Можно описывать круг трения шины, имеющий эллиптическую форму, посредством нанесения на график наибольшего значения равнодействующей силы из продольной силы Fx вследствие силы сцепления в продольном направлении, и поперечной силы Fy вследствие силы сцепления в поперечном направлении, в соответствии с направлением равнодействующей силы. В следующем пояснении, поперечная сила Fy, продольная сила Fx и результирующая сила из поперечной и продольной сил Fy и Fx, в общем, упоминаются как сила на колесе, как общий термин.
Следовательно, можно определять, в соответствии с соотношением между кругом трения шины и абсолютной величиной силы на колесе, что по мере того, как абсолютная величина силы на колесе приближается к радиусу круга трения (внешней окружности), сила трения приближается к наибольшему значению, которое может формироваться посредством шины (пределу по трению). Таким образом, можно теоретически определять допустимый запас либо степень допустимого запаса или простора силы сцепления шины для предела по трению. Тем не менее, определение размера круга трения шины является трудным на практике, и до настоящего времени невозможно определять допустимый запас для предела по трению на основе вышеуказанной теории.
Размер круга трения определяется посредством наибольшего значения силы трения между шиной и поверхностью контакта земли. Предшествующая технология, известная к настоящему времени, может оценивать только наибольшее значение силы трения в состоянии, превышающем предел по трению. Следовательно, система предшествующей технологии не может оценивать наибольшее значение силы трения до того, как предел по трению достигается, и не может знать допустимый запас для предела по трению в состоянии до предела по трению, так что трудно управлять силой трения шины, чтобы не допускать достижения предела по трению. В отличие от этого, этот вариант осуществления настоящего изобретения позволяет определять допустимый запас для предела по трению непосредственно без зависимости от силы трения.
(4) Соотношение между силой на колесе и состоянием сцепления (μ-градиентом) с использованием трехмерных координат
Как упомянуто выше, этот вариант осуществления настоящего изобретения позволяет определять допустимый запас или степень допустимого запаса для предела по трению непосредственно без зависимости от силы трения. С этой целью, взаимосвязь (трехмерная характеристическая карта) между силой на колесе колеса и состоянием сцепления (μ-градиентом) получается посредством использования трехмерной системы координат согласно следующему процессу, как пояснено ниже.
(4-1) Соотношение между силой на колесе и степенью скольжения колеса с использованием трехмерной системы координат.
Фиг.19 показывает процесс преобразования взаимосвязи между продольной силой Fx и скоростью λ скольжения (двумерная система координат) в форму в трехмерной системе координат. Как показано на фиг.19A, согласно характеристической кривой шины (характеристической кривой Fx-λ), скорость скольжения, при которой продольная сила Fx становится наибольшей, задается как λpeak. А именно, продольная сила Fx увеличивается с увеличением скорости λ скольжения. Тем не менее, когда скорость λ скольжения увеличивается до определенного уровня, продольная сила Fx становится насыщенной, и после этого продольная сила Fx уменьшается. Эта точка насыщения, в которой продольная сила Fx достигает насыщения, задается как λpeak. Затем, как показано на фиг.19B, ось скорости λ скольжения преобразуется в безразмерную форму из λpeak в λ/λpeak, и после этого местоположение λ/λpeak, равное единице, изменяется на начало координат (ось продольной силы Fx сдвигается к значению λ/λpeak, равному единице). Затем, как показано на фиг.19C, двумерная система координат по фиг.19B поворачивается на 90°. После этого, линия взаимосвязей (характеристическая кривая) между продольной силой Fx и λ/λpeak иллюстрируется в одном квадранте трехмерной системы координат, как показано на фиг.19D. На фиг.19D, осью λ/λpeak является ось Z. Как упомянуто ниже, Z является степенью скольжения.
Фиг.20 показывает процесс преобразования взаимосвязи между поперечной силой Fy и углом βt скольжения (двумерная система координат) в форму в трехмерной системе координат. Взаимосвязь между поперечной силой Fy и углом βt скольжения преобразуется в трехмерную систему координат таким же образом, как для взаимосвязи между продольной силой Fx и скоростью λ скольжения. Как показано на фиг.20A, согласно характеристической кривой шины (характеристической кривой Fy-βt по фиг.10), угол скольжения, при котором поперечная сила Fy становится наибольшей, задается как βpeak. Поперечная сила Fy увеличивается с увеличением угла βt скольжения. Тем не менее, когда угол βt скольжения увеличивается до определенного уровня, поперечная сила Fy становится насыщенной и после этого уменьшается. Точка насыщения, в которой поперечная сила Fy насыщается, задается как βtpeak. Затем, как показано на фиг.20B, ось угла β скольжения преобразуется в безразмерную ось βt/βtpeak, и значение β/βpeak, равное единице, задается как начало координат (ось поперечной силы Fy сдвигается к значению βt/βtpeak, равному единице). После этого, как показано на фиг.20C, двумерная система координат по фиг.20B поворачивается на 90°. Затем, как показано на фиг.20D, линия взаимосвязей (характеристическая кривая) между поперечной силой Fy и βt/βtpeak иллюстрируется в квадранте трехмерной системы координат. На фиг.20D, ось βt/βtpeak задается как ось Z.
Фиг.21 показывает трехмерную искривленную поверхность, полученную посредством интерполяции между линией взаимосвязей продольной силы Fx и λ/λpeak (характеристической линией, плоскость Fx-Z), показанной на фиг.19D, и линией взаимосвязей поперечной силы Fy и βt/βtpeak (характеристической линией, плоскость Fy-Z), показанной на фиг.20D. Трехмерная искривленная поверхность по фиг.21 получается посредством дополнительной вставки эллипса, соответствующего кругу трения шины для каждого значения вдоль оси Z, между линией взаимосвязей (характеристической линией) "a" по фиг.19D между продольной силой Fx и λ/λpeak и линией взаимосвязей (характеристической линией) "b" по фиг.20D между поперечной силой Fy и βt/βtpeak. Трехмерная искривленная поверхность по фиг.21 является искривленной поверхностью, существующей между плоскостью Fx-Z, содержащей ось Fx и ось Z, и плоскостью Fy-Z, содержащей ось Fy и ось Z.
Как упомянуто выше, степень скольжения (Z) используется в качестве общего понятия для названия, в общем, скорости λ скольжения, относящейся к продольной силе Fx, и угла βt скольжения, относящегося к поперечной силе Fy. Соответственно, ось Z, показанная на фиг.21, является осью, представляющей степень скольжения (λ/λpeak, βt/βtpeak). Трехмерная искривленная поверхность представляет взаимосвязь между степенью скольжения и силой на колесе. На фиг.21, трехмерная искривленная поверхность, представляющая взаимосвязь между степенью скольжения и силой на колесе, показывается частично только для 1/4 части (квадранта) и немного более из всей окружности. Тем не менее, трехмерная искривленная поверхность, представляющая взаимосвязь между степенью скольжения и силой на колесе, на практике идет по всей окружности, и, соответственно, трехмерная искривленная поверхность, представляющая взаимосвязь между степенью скольжения и силой на колесе, является куполообразной или полусферической.
На фиг.21 скорость λ скольжения и угол βt скольжения, которые отличаются в единицах, проиллюстрированы в одной системе координат посредством обезразмеривания в λ/λpeak и βt/βtpeak, соответственно. Следовательно, трехмерная искривленная поверхность по фиг.21 представляет набор линий взаимосвязей между равнодействующей силой F из продольной силы Fx и поперечной силы Fy и степенью Z скольжения, относящейся к равнодействующей силе F. Равнодействующая сила F соответствует наклонной силе, действующей в наклонном направлении шины. Степень Z скольжения, относящаяся к равнодействующей силе F, является понятием, сформированным посредством комбинирования скорости λ скольжения и угла βt скольжения.
Фиг.22 является видом для пояснения набора линий взаимосвязей (двумерных характеристических кривых) между равнодействующей силой F из продольной силы Fx и поперечной силы Fy и степенью Z скольжения, относящейся к равнодействующей силе F, показанной на фиг.21. В трехмерной системе координат предусмотрено бесчисленное множество комбинаций абсолютной величины и направления равнодействующей силы F, являющейся результатом различных комбинаций скалярной величины и направления продольной силы Fx и скалярной величины и направления поперечной силы Fy. В этом варианте осуществления, сила на колесе (F) может действовать в любом направлении на 360° вокруг оси Z, и проиллюстрированный вариант осуществления приспособлен для всех направлений. Соответственно, можно сказать, что взаимосвязью между равнодействующей силой F и степенью скольжения, относящейся к равнодействующей силе F в трехмерной системе координат, является набор двумерных характеристик, показанных в плоскости, содержащей ось Z и равнодействующую силу F. Как показано на фиг.22B, можно получать взаимосвязь между равнодействующей силой F и степенью Z скольжения, относящейся к равнодействующей силе F, в форме двумерной характеристической кривой. Предусмотрено бесчисленное число плоскостей, содержащих ось Z и равнодействующую силу F, в зависимости от направления равнодействующей силы F вокруг оси Z, и эти плоскости формируют пучок плоскостей, имеющих ось Z в качестве оси. Каждая из этих плоскостей включает в себя двумерную характеристическую кривую, как показано на фиг.22B.
Ниже приводится пояснение относительно допустимого запаса (или степени допустимого запаса) равнодействующей силы F для предела по трению в трехмерной системе координат. Характеристическая кривая шины, показанная на фиг.22B, является линией пересечения между трехмерной искривленной поверхностью, представляющей взаимосвязь между степенью скольжения и силой на колесе (Fx, Fy, F), показанной на фиг.22A, и плоскостью, содержащей вектор равнодействующей силы F и оси Z. Наклон касательной полученной таким образом характеристической кривой шины, показанной на фиг.22B, является величиной, представляющей допустимый запас для предела по трению шины. По мере того, как наклон касательной характеристической кривой шины по фиг.22B становится ближе к нулю от положительного значения, состояние становится ближе к пределу по трению. Следовательно, если наклон касательной линии к характеристической кривой шины считывается, то можно определять допустимый запас для предела по трению в состоянии до того, как предел по трению достигается. Когда наклон касательной линии к характеристической кривой шины по фиг.22B является отрицательным, шина находится в состоянии, в котором сила трения насыщается, т.е. в состоянии скольжения. В этой точке можно выявлять допустимый запас для предела по трению (сила трения насыщена) до того, как шина достигает состояния скольжения, если наклон касательной характеристической кривой шины может быть определен.
На фиг.23 показано соотношение между равнодействующей силой F и степенью Z скольжения, вызываемой посредством равнодействующей силы F, когда размер круга трения шины варьируется. Как упомянуто выше, размер круга трения шины определяется посредством наибольшего значения силы трения между шиной и поверхностью контакта земли (в дальнейшем называемой "наибольшей силой трения"). Круг трения шины становится меньшим при наибольшем значении силы трения между шиной и поверхностью контакта земли. Следовательно, как показано на фиг.23(A) и 23(B), характеристическая кривая шины (круг трения шины) изменяется в зависимости от абсолютной величины наибольшей силы трения. Поскольку невозможно оценивать наибольшее значение силы трения до того, как предел по трению достигается, как упомянуто выше, применение к управлению транспортным средством является неосуществимым, если ничего не предпринимается.
На фиг.24 показано соотношение между характеристическими кривыми шины (характеристическими кривыми F-Z) различных значений наибольшей силы трения (например, μ поверхности дороги) и прямой линией (показанной посредством прямой линии с цепочкой из одиночных точек), проходящей через начало O координат (т.е. точку, в которой степень скольжения и сила на колесе равны нулю). Как показано на фиг.24A и 24B, наклон (в дальнейшем называемый μ-градиентом) в точке пересечения между характеристической кривой шины и прямой линией, проходящей через начало O координат, является константой независимо от абсолютной величины наибольшей силы трения. Таким образом, относительно характеристических кривых шины различных значений наибольшей силы трения, наклоны равны друг другу, если соотношение (F/Z) равнодействующей силы F и степени Z скольжения является идентичным. При помощи этого свойства взаимосвязь между соотношением (F/Z) равнодействующей силы F и степени Z скольжения и наклоном γ касательной характеристической кривой шины может быть перекомпонована в форму, которая не зависит от наибольшей силы трения.
(4-2) Связь между силой на колесе и состоянием сцепления (μ-градиентом) с использованием трехмерной системы координат
Фиг.25 показывает взаимосвязь между соотношением (F/Z) равнодействующей силы F и степени Z скольжения и наклоном γ касательной характеристической кривой шины. Можно получать одну сконцентрированную характеристику (двумерную характеристическую кривую), которая не зависит от наибольшей силы трения, как показано на фиг.25, посредством перекомпоновки взаимосвязи между соотношением (F/Z) равнодействующей силы F и степени Z скольжения и наклоном γ касательной характеристической кривой шины. Посредством подготовки характерных данных с фиг.25 заранее в форме характеристической карты, например, можно определять значение наклона касательной линии к характеристической кривой шины посредством использования характерных данных и определять допустимый запас для предела по трению, если равнодействующая сила F и степень скольжения могут быть определены. Таким образом, можно определять допустимый запас для предела по трению без получения информации по наибольшей силе трения (без оценки наибольшей силы трения).
Поскольку абсолютная величина и направление равнодействующей силы F в трехмерных осях координат могут допускать бесчисленное число значений вследствие различных комбинаций значений скалярной величины и направления продольной силы Fx и скалярной величины и направления поперечной силы Fy, имеются несчетные формы взаимосвязи, показанной на фиг.25, между соотношением (F/Z) равнодействующей силы F и степени Z скольжения и наклоном γ касательной характеристической кривой шины, в бесчисленном числе, соответствующем числу направлений равнодействующей силы F. В плоскости, содержащей ось Z и ось Fx в трехмерной системе координат, показанной на фиг.26A, существует взаимосвязь между соотношением (Fx/λ) продольной силы Fx и скорости λ скольжения и наклоном γ касательной характеристической кривой шины, как показано на фиг.26D. В плоскости, содержащей ось Z и ось Fy, существует взаимосвязь между соотношением (Fy/βt) поперечной силы Fy и угла βt скольжения и наклоном γ касательной характеристической кривой шины. В плоскости, содержащей ось Z и равнодействующую силу F, существует взаимосвязь между соотношением (F/Z) равнодействующей силы F и степени Z скольжения и наклоном γ касательной характеристической кривой шины.
Посредством использования вышеуказанной технологии в качестве базовой технологии авторы настоящей заявки реализуют представление несчетных форм взаимосвязи между соотношением (F/Z) равнодействующей силы F и степени Z скольжения и наклоном касательной характеристики шины (μ-градиентом) совместно в одной трехмерной системе координат.
Фиг.27A показывает, в качестве примера, взаимосвязь между соотношением (F/Z) равнодействующей силы F и степени Z скольжения и наклоном γ касательной (μ-градиентом) характеристической кривой шины в трехмерной системе координат. На фиг.27(C), ось, представляющая соотношение (F/Z) равнодействующей силы F (силы на колесе) и степени Z скольжения, обезразмеривается (нормализуется) ((F/Z)/max(F/Z)) с помощью наибольшего значения max(F/Z) соотношения (F/Z) равнодействующей силы F (силы на колесе) и степени Z скольжения, чтобы задавать величину, представленную посредством оси, равной единице при наибольшем значении max(F/Z). Таким образом, как показано на фиг.27B, ось, представляющая соотношение (Fx/λ) продольной силы как компонента равнодействующей силы F и скорости λ скольжения, обезразмеривается ((Fx/λ)/max(Fx/λ)) с помощью наибольшего значения max(Fx/λ) соотношения (Fx/λ), чтобы задавать величину, представленную посредством оси, равной единице при наибольшем значении max(Fx/λ). Кроме того, как показано на фиг.27D, ось, представляющая соотношение (Fy/βt) поперечной силы Fy как компонента равнодействующей силы F и угла βt скольжения, обезразмеривается (нормализуется) ((Fy/βt)/max(Fy/βt)) с помощью наибольшего значения max(Fy/βt) соотношения (Fy/βt), чтобы задавать величину на оси равной единице при наибольшем значении max(Fy/βt).
Кроме того, ось, представляющая наклон γ касательной характеристической кривой шины, обезразмеривается (нормализуется) с помощью наибольшего значения max(γ) наклона касательной, чтобы задавать величину, представленную посредством оси, равной единице при наибольшем значении max(γ).
Наибольшие значения max(F/Z) и max(γ) определяются следующим образом, как показано на фиг.28. Наибольшие значения max(F/Z) и max(γ) являются значениями в состоянии, в котором степень Z скольжения является очень небольшой, и шина надежно находится в состоянии сцепления, т.е. значениями в линейном состоянии характеристики шины. Как показано на фиг.28A, в линии взаимосвязей (характеристической кривой шины) равнодействующей силы F и степени Z скольжения, наибольшее значение max(γ) является наклоном касательной линии взаимосвязей в области, в которой изменение в равнодействующей силе F и изменение в степени Z скольжения находятся в линейной зависимости. Таким образом, max(γ) является наклоном касательной в начале O координат. Как показано на фиг.28B, наибольшее значение max(F/Z) является соотношением (F/Z) равнодействующей силы F и степени Z скольжения, при котором получается max(γ). Это наибольшее значение max(F/Z) является значением, внутренне присутствующим в транспортном средстве. Наклон max(γ) является постоянным, даже если сила трения, действующая на поверхности контакта шины и земли, варьируется. Следовательно, можно определять наклон max(γ) и max(F/Z) простым образом заранее.
Соотношение между равнодействующей силой F и степенью Z скольжения может поясняться следующим образом посредством использования соотношения между продольной силой Fx и скоростью λ скольжения. Наибольшие значения max(Fx/λ) и max(γ) являются значениями в состоянии, в котором скорость λ скольжения является очень небольшой, и шина надежно находится в состоянии сцепления, т.е. значениями в линейном состоянии характеристики шины. В линии взаимосвязей (характеристической кривой шины) продольной силы Fx и скорости λ скольжения, наибольшее значение max(γ) является наклоном касательной линии взаимосвязей в области, в которой изменение в продольной силе Fx и изменение в скорости λ скольжения находятся в линейной зависимости. Таким образом, max(γ) является наклоном касательной в начале O координат. Наибольшее значение max(Fx/λ) является соотношением (Fx/λ) продольной силы Fx и скорости λ скольжения, при котором получается max(γ). Это наибольшее значение max(Fx/λ) является значением, внутренне присутствующим в транспортном средстве. Наклон max(γ) является постоянным, даже если варьируется сила трения, действующая на поверхности контакта шины и земли. Следовательно, можно простым образом заранее определять наклон max(γ) и max(Fx/λ).
Соотношение между равнодействующей силой F и степенью Z скольжения может поясняться аналогично следующим образом посредством использования соотношения между поперечной Fy и углом βt скольжения. Наибольшие значения max(Fy/βt) и max(γ) являются значениями в состоянии, в котором скорость λ скольжения является очень небольшой, и шина надежно находится в состоянии сцепления, т.е. значениями в линейном состоянии характеристики шины. В линии взаимосвязей (характеристической кривой шины) поперечной Fy и угла βt скольжения, наибольшее значение max(γ) является наклоном касательной линии взаимосвязей в области, в которой изменение в поперечной силе Fy и изменение в угле βt скольжения находятся в линейной зависимости. Таким образом, max(γ) является наклоном касательной в начале O координат. Наибольшее значение max(Fy/βt) является соотношением (Fy/βt) поперечной силы Fy и угла βt скольжения, при котором получается max(γ). Это наибольшее значение max(Fy/βt) является значением, внутренне присутствующим в транспортном средстве. Наклон max(γ) является постоянным, даже если сила трения, действующая на поверхности контакта шины и земли, варьируется. Следовательно, можно определять наклон max(γ) и max(Fy/βt) простым образом заранее.
Таким образом, можно получать взаимосвязь между соотношением (F/Z) равнодействующей силы F и степени Z скольжения и наклоном касательной (μ-градиентом) характеристической кривой шины в форме характеристики (характеристики μ-градиента) в трехмерной системе координат.
На фиг.29 показана взаимосвязь между соотношением (F/Z) равнодействующей силы F и степени Z скольжения и наклоном касательной (μ-градиентом) характеристической кривой шины, в форме характеристики (характеристики μ-градиента) в трехмерной системе координат. На фиг.29, γ0 соответствует эталонному значению, которое составляет max(γ); (Fx0/λ0), соответствует эталонному соотношению, которое составляет max(Fx/λ); и (Fy0/βt0) соответствует эталонному соотношению, которое составляет max(Fy/βt). Варианты осуществления выполнены с возможностью определять состояние сцепления и допустимый запас или степень допустимого запаса для предела по трению непосредственно безотносительно силы трения посредством наличия характеристики, как показано на фиг.29, в форме карты (трехмерной характеристической карты μ-градиента).
Варианты осуществления изобретения
Далее приводится пояснение относительно вариантов осуществления, реализованных посредством использования вышеуказанной технологии.
Первый вариант осуществления изобретения
Конструкция
Фиг.30 является видом, схематично показывающим общую конструкцию транспортного средства согласно первому варианту осуществления. Транспортное средство, показанное на фиг.30, является электрическим полноприводным транспортным средством. Как показано на фиг.30, транспортное средство включает в себя датчик 1 угла поворота колес, датчик 2 скорости поворота вокруг вертикальной оси, датчик 3 поперечного ускорения, датчик 4 продольного ускорения, датчик 5 скорости вращения колес, электронный модуль управления электроусилителем руля (EPSECU) 6, электродвигатель 7 электроусилителя руля (EPS) и устройство или модуль 8 оценки состояния движения (или работы) транспортного средства. Транспортное средство дополнительно включает в себя приводные/тормозные электродвигатели 21FL-21RR, соединенные непосредственно с соответствующими колесами 11FL-11RR транспортного средства и электронным модулем управления (ECU) 22 приводного/тормозного электродвигателя.
Датчик 1 угла поворота колес считывает угол поворота рулевого вала 10, поворачивающегося как один модуль с рулем 9. Датчик 1 угла поворота колес доставляет результат считывания (угол поворота колес) в устройство 8 оценки состояния движения транспортного средства. Датчик 2 скорости поворота вокруг вертикальной оси считывает скорость поворота вокруг вертикальной оси транспортного средства и доставляет результат считывания в устройство 8 оценки состояния движения транспортного средства. Датчик 3 поперечного ускорения считывает поперечное ускорение транспортного средства и передает результат считывания в устройство 8 оценки состояния движения транспортного средства. Датчик 4 продольного ускорения считывает продольное ускорение транспортного средства и доставляет результат считывания в устройство 8 оценки состояния движения транспортного средства. Датчик 5 скорости вращения колес считывает скорости вращения колес для колес 11FL-11RR, предусмотренных в кузове транспортного средства, и доставляет результаты считывания в устройство 8 оценки состояния движения транспортного средства.
EPSECU 6 выводит команду помощи в рулении в EPS-электродвигатель 7 в соответствии с углом поворота колес, считываемым посредством датчика 1 угла поворота колес. Эта команда помощи в рулении является командным сигналом для осуществления помощи в регулировании усилия на руле. Кроме того, EPSECU 6 выводит команду помощи в рулении в EPS-электродвигатель 7 в соответствии с командой (командой помощи в ограничении нестабильного поведения), сформированной посредством устройства 8 оценки состояния движения транспортного средства. Эта команда помощи в рулении является командным сигналом для ограничения нестабильного поведения транспортного средства.
EPS-электродвигатель 7 передает крутящий момент на рулевой вал 10 в соответствии с командой помощи в рулении, выводимой из EPSECU 6. Следовательно, EPS-электродвигатель 7 предоставляет помощь для перемещения при рулении левого и правого передних колес 11FL и 11FR через механизм реечной передачи (шестерню 12 и рейку 13), соединенный с рулевым валом 10, поперечной рулевой тягой 14 и рычагами поворотного кулака.
ECU 22 приводного/тормозного электродвигателя управляет приводными/тормозными электродвигателями 21FL-21RR в соответствии с вводами от водителя от тормозной педали 15 и педали акселератора 16 и информацией от устройства 8 оценки состояния движения транспортного средства.
Устройство 8 оценки состояния движения транспортного средства оценивает состояние движения (или работы) транспортного средства в соответствии с результатами считывания датчика 1 угла поворота колес, датчика 2 скорости поворота вокруг вертикальной оси, датчика 3 поперечного ускорения, датчика 4 продольного ускорения и датчика 5 скорости вращения колес. В соответствии с результатом оценки, устройство 8 оценки состояния движения транспортного средства выводит команду (команду помощи в ограничении нестабильного поведения) в EPSECU 6 и ECU 22 приводного/тормозного электродвигателя. Эта команда является командным сигналом для управления EPS-электродвигателем 7 и продольной силой, чтобы ограничивать нестабильное поведение транспортного средства.
Фиг.31 показывает внутреннюю конфигурацию устройства или модуля 8 оценки состояния движения транспортного средства. Как показано на фиг.31, устройство 8 оценки состояния движения транспортного средства включает в себя модуль 41 вычисления скорости кузова транспортного средства, модуль 42 оценки скорости скольжения, модуль 43 оценки продольной силы, модуль 44 оценки угла скольжения шин, модуль 45 оценки поперечной силы, модуль 46 оценки соотношения продольной силы и скорости скольжения (в дальнейшем называемый модулем вычисления Fx/λ), модуль 47 оценки соотношения поперечной силы и угла скольжения (в дальнейшем называемый модулем вычисления Fy/βt), модуль 48 вычисления состояния сцепления шины (модуль вычисления μ-градиента), модуль 49 вычисления команд коррекции продольной силы, модуль 50 вычисления характеристик поворачиваемости и модуль 51 вычисления команд помощи при повороте.
Модуль 41 вычисления скорости кузова транспортного средства оценивает скорость кузова транспортного средства в соответствии со скоростями вращения колес, считываемыми посредством датчика 5 скорости вращения колес, и продольным ускорением, считываемым посредством датчика 4 продольной скорости. В частности, модуль 41 вычисления скорости кузова транспортного средства вычисляет среднее значение (или среднее) скоростей вращения колес для приводимых в движение колес 11RL и 11RR или среднее значение (или среднее) скоростей вращения колес для колес 11FL-11RR и задает вычисленное значение как базовое значение скорости кузова транспортного средства. Модуль 41 вычисления скорости кузова транспортного средства модифицирует это базовое значение с продольным ускорением. В частности, модуль 41 вычисления скорости кузова транспортного средства модифицирует базовое значение, чтобы исключать влияние погрешностей вследствие пробуксовки шин во время быстрого ускорения и блокировки шин во время резкого торможения. Модуль 41 вычисления скорости кузова транспортного средства задает таким образом модифицированное значение как оцененную скорость кузова транспортного средства. Модуль 41 вычисления скорости кузова транспортного средства выводит результат вычисления в модуль 42 оценки скорости скольжения и модуль 44 оценки угла скольжения шин.
Модуль 42 оценки скорости скольжения вычисляет скорости λf и λr скольжения передних и задних колес (для двух передних колес и для двух задних колес) в соответствии со скоростями вращения колес для колес 11FL-11RR, считываемыми посредством датчика 5 скорости вращения колес, и скоростью кузова транспортного средства, вычисляемой посредством модуля 41 вычисления скорости кузова транспортного средства. Затем, модуль 42 оценки скорости скольжения выводит результаты вычисления в модуль 46 вычисления Fx/λ.
Модуль 43 оценки продольной силы оценивает продольные силы (приводящие в движение/тормозные крутящие моменты) Fxf и Fxr, выводимые в передних и задних колесах в соответствии с частотами вращения и значениями тока приводных/тормозных электродвигателей 21FL-21RR. Например, модуль 43 оценки продольной силы получает частоты вращения и значения тока приводных/тормозных электродвигателей 21FL-21RR через ECU 22 приводного/тормозного электродвигателя. Относительно вычисления продольных сил Fxf и Fxr передних колес и задних колес, модуль 43 оценки продольной силы специально вычисляет приводящие в движение/тормозные крутящие моменты TTir приводных/тормозных электродвигателей 21FL-21RR согласно следующему математическому выражению (1).
Математическое выражение 1:

Каждый из приводных/тормозных электродвигателей 21FL-21RR формирует крутящий момент, который является пропорциональным току Ι. Коэффициентом пропорциональности этой пропорциональной взаимосвязи является KMTR. Кроме того, поскольку имеются сопутствующие потери крутящего момента, пропорциональные угловому ускорению и угловой скорости относительно угла θMTR электродвигателя, и потери крутящего момента вследствие трения, осуществляется коррекция этих потерь крутящего момента. В этом случае, усилением, соответствующим инерции, является IMTR, усилением, соответствующим внутреннему трению (включающему в себя противодействующую электродвижущую силу), является CMTR, и трением является RMTR, и эти параметры идентифицируются заранее.
Затем, модуль 43 оценки продольной силы задает сумму приводящих в движение/тормозных крутящих моментов TTir приводных/тормозных электродвигателей 21FL и 21FR для передних колес 11FL и 11FR как приводящий в движение/тормозной крутящий момент для левого и правого передних колес. Кроме того, модуль 43 оценки продольной силы задает сумму приводящих в движение/тормозных крутящих моментов TTir приводных/тормозных электродвигателей 21RL и 21RR для задних колес 11RL и 11RR как приводящий в движение/тормозной крутящий момент для левого и правого задних колес.
Модуль 43 оценки продольной силы вычисляет продольную силу Fxf для передних колес посредством умножения приводящих в движение/тормозных крутящих моментов TTir передних колес на их динамический радиус и вычисляет продольную силу Fxr для задних колес посредством умножения приводящих в движение/тормозных крутящих моментов TTir задних колес на их динамический радиус. Модуль 43 оценки продольной силы выводит результаты вычисления (результаты оценки) в модуль 45 вычисления Fx/λ. Продольная сила Fxf является равнодействующей силой левого и правого передних колес, а продольная сила Fxr является равнодействующей силой левого и правого задних колес.
Модуль 46 вычисления Fx/λ вычисляет соотношения (Fxf/λf, Fxr/λr) продольной силы Fxf и Fxr передних и задних колес и скоростей λf и λr скольжения передних и задних колес, соответственно, в соответствии со скоростями λf и λr скольжения передних и задних колес, вычисляемыми посредством модуля 42 оценки скорости скольжения, и продольными силами Fxf и Fxr передних и задних колес, вычисляемыми посредством модуля 43 оценки продольной силы. Модуль 46 вычисления Fx/λ выводит результаты вычисления в модуль 48 вычисления состояния сцепления шины.
Модуль 44 оценки угла скольжения шин оценивает угол β скольжения кузова транспортного средства (угол бокового скольжения транспортного средства) и преобразует оцененный угол β скольжения кузова транспортного средства в угол βt скольжения (угол скольжения шин) каждого из передних и задних колес.
С этой целью, модуль 44 оценки угла скольжения шин сначала оценивает угол бокового скольжения транспортного средства (угол скольжения) в соответствии с углом поворота колес (углом δ поворота шин), считываемым посредством датчика 1 угла поворота колес, скоростью γ поворота вокруг вертикальной оси (Ф'), считываемой посредством датчика 2 скорости поворота вокруг вертикальной оси, поперечным ускорением, считываемым посредством датчика 3 поперечного ускорения, продольным ускорением, считываемым посредством датчика 4 продольного ускорения, и скоростью V кузова транспортного средства, вычисляемой посредством модуля 41 вычисления скорости кузова транспортного средства.
Фиг.32 показывает, в качестве примера, конфигурацию модуля 44 оценки угла скольжения кузова транспортного средства для оценки угла бокового скольжения транспортного средства (угла скольжения). Как показано на фиг.32, модуль 44 оценки угла скольжения кузова транспортного средства включает в себя линейный модуль 61 наблюдения с двумя входами, оценивающий одну или более переменных состояния транспортного средства (угол β бокового скольжения транспортного средства, угол β скольжения). При этой конструкции, модуль 44 оценки угла скольжения кузова транспортного средства оценивает угол β бокового скольжения транспортного средства (угол скольжения). Линейный модуль 61 наблюдения с двумя входами основан на двухколесной модели транспортного средства, которая может быть выражена посредством следующего математического выражения (2), посредством использования равновесия сил в поперечном направлении и момента транспортного средства.
Математическое выражение 2:

В этих уравнениях, A, B, C и D, показанные на фиг.32, являются матрицами, определенными посредством линейной двухколесной модели транспортного средства. Посредством задания угла поворота шин в качестве ввода u и скорости поворота вокруг вертикальной оси и поперечного ускорения в качестве вывода y, можно получать уравнение состояния (уравнение вывода) математического выражения (2), выраженное посредством следующего математического выражения (3).
Математическое выражение 3:

В этих уравнениях m является массой транспортного средства, I является вызывающим вращение моментом инерции, lf является расстоянием между центром тяжести транспортного средства и передней осью, lr является расстоянием между центром тяжести транспортного средства и задней осью, Cpf является мощностью на повороте передних колес (суммой для левого и правого колес), Cpr является мощностью на повороте задних колес (суммой для левого и правого колес), V является скоростью кузова транспортного средства, β является углом бокового скольжения транспортного средства, γ является скоростью поворота вокруг вертикальной оси, Gy является поперечным ускорением, и a11, a12, и b1 являются элементами матриц A и B.
На основе этого уравнения состояния, линейный модуль 61 наблюдения с двумя входами формируется посредством задания скорости поворота вокруг вертикальной оси и поперечного ускорения в качестве ввода и использования усиления K1 модуля наблюдения. Усиление K1 модуля наблюдения является значением, заданным так, чтобы ограничивать влияние погрешности моделирования и обеспечивать стабильную оценку. Можно заменять модуль наблюдения посредством фактического измерения с использованием GPS (глобальной системы определения местоположения) либо другой технологии или способа оценки, отличного от вышеуказанной оценки.
Линейный модуль 25 наблюдения с двумя входами включает в себя модуль 63 компенсации для оценки β, используемый для того, чтобы модифицировать ввод модуля 62 интеграции. С помощью этого модуля 63 компенсации для оценки β, линейный модуль 61 наблюдения с двумя входами может обеспечивать достаточную точность оценки даже в предельной или критической области. При помощи модуля 63 компенсации для оценки β, можно оценивать угол β бокового скольжения точно даже в случае изменения состояния μ поверхности дороги и в случае критического поведения транспортного средства, а также в линейной области, в которой существует состояние μ поверхности дороги, предполагаемое во время разработки линейной двухколесной модели транспортного средства, и характеристика угла бокового скольжения шины не становится нелинейной.
На фиг.33 показано транспортное средство в движении при повороте для угла β бокового скольжения кузова транспортного средства. Как показано на фиг.33, сила поля, действующая на кузов транспортного средства, т.е. центробежная сила, действующая за пределы центра поворота, также формируется в направлении, отклоненном от направления ширины транспортного средства на значение, соответствующее углу β бокового скольжения. Следовательно, модуль 63 компенсации для оценки β вычисляет отклонение β2 силы поля согласно следующему математическому выражению (4). Это отклонение β2 выступает в качестве эталонного значения (целевого значения) G, используемого для того, чтобы модифицировать угол β бокового скольжения транспортного средства, оцененный посредством линейного модуля 61 наблюдения с двумя входами.
Математическое выражение 4:

В этом уравнении Gx является продольным ускорением. Кроме того, как показано на фиг.34, равновесие сил вследствие переключений скорости принимается во внимание. Соответственно, посредством извлечения только компонентов, обусловленных движением в повороте, выражение (4) может быть перезаписано как следующее математическое выражение (5).
Математическое выражение 5:

Модуль 63 компенсации для оценки β вычитает целевое значение β2 из угла β бокового скольжения, оцененного посредством линейного модуля 61 наблюдения с двумя входами. Кроме того, модуль 63 компенсации для оценки β умножает результат вычитания на усиление K2 компенсации, заданное согласно схеме управления по фиг.35. Затем, модуль 63 компенсации для оценки β использует результат умножения в качестве ввода в модуль 62 интеграции.
В схеме управления, показанной на фиг.35, усиление K2 компенсации задается равным нулю, когда абсолютное значение (|Gy|) поперечного ускорения Gy транспортного средства меньше или равно первому пороговому значению, и поддерживается при относительно большом постоянном значении, когда абсолютное значение поперечного ускорения Gy транспортного средства превышает или равно второму пороговому значению, которое превышает первое пороговое значение.
Когда абсолютное значение поперечного ускорения Gy транспортного средства находится в промежутке между первым и вторым пороговыми значениями, усиление K2 компенсации увеличивается по мере того, как абсолютное значение поперечного ускорения Gy увеличивается.
С помощью карты управления по фиг.35, в которой усиление K2 компенсации задается равным нулю, когда абсолютное значение поперечного ускорения Gy меньше или равно первому пороговому значению и является близким к нулю, система не выполняет ошибочную модификацию, поскольку нет необходимости модификации в ситуации, такой как ситуация движения вперед по прямой, в которой поворот G не выполняется. Кроме того, в карте управления по фиг.35, коэффициент K2 обратной связи (усиление компенсации) увеличивается в пропорции к абсолютному значению поперечного ускорения Gy, когда абсолютное значение поперечного ускорения Gy становится превышающим первое пороговое значение (например, 0,1G), и усиление K2 компенсации поддерживается неизменно при постоянном значении, чтобы стабилизировать управление, когда абсолютное значение поперечного ускорения Gy становится превышающим или равным второму пороговому значению (например, 0,5G). Посредством регулирования усиления K2 компенсации таким образом, система повышает точность оценки угла β бокового скольжения.
Затем, модуль 44 оценки угла скольжения шин вычисляет углы βf и βr скольжения передних и задних колес (углы βf и βr скольжения колеса) в соответствии с таким образом вычисленным углом β бокового скольжения транспортного средства (углом скольжения транспортного средства) посредством использования следующего выражения (6).
Математическое выражение 6:




Модуль 44 оценки угла скольжения шин выводит вычисленные углы βf и βr скольжения передних и задних колес (βt) в модуль 47 вычисления Fy/βt.
Модуль 45 оценки поперечной силы вычисляет поперечные силы Fyf и Fyr передних и задних колес в соответствии со скоростью γ поворота вокруг вертикальной оси, считываемой посредством датчика 2 скорости поворота вокруг вертикальной оси, и поперечным ускорением Gy, считываемым посредством датчика 3 поперечного ускорения, посредством использования следующего выражения (7).
Математическое выражение 7:


Скорость γ поворота вокруг вертикальной оси и поперечное ускорение Gy являются величинами, как показано на фиг.36. Модуль 45 оценки поперечной силы выводит вычисленные поперечные силы Fyf и Fyr в модуль 47 вычисления Fy/βt. Каждая из поперечных сил Fyf и Fyr передних и задних колес является равнодействующей силой левых и задних двух колес на передней или задней стороне.
Модуль 47 вычисления Fy/βt вычисляет соотношения (Fyf/βtf, Fyr/βtr) поперечных сил Fyf и Fyr и углов βtf и βtr скольжения в соответствии с углами βtf и βtr скольжения передних и задних колес и поперечными силами Fyf и Fyr передних и задних колес, вычисляемыми посредством модуля 44 оценки угла скольжения шин и модуля 45 оценки поперечной силы. Модуль 47 вычисления Fy/βt выводит результаты вычисления в модуль 48 вычисления состояния сцепления шины.
Модуль 48 вычисления состояния сцепления шины (модуль вычисления μ-градиента) оценивает состояние сцепления передних колес и состояние сцепления задних колес в соответствии с соотношениями (Fxf/λf, Fxr/λr) продольных сил Fxf и Fxr передних и задних колес и скоростей λf и λr скольжения передних и задних колес, вычисляемыми посредством модуля 46 вычисления Fx/λ, и соотношениями (Fyf/βtf, Fyr/βtr) поперечных сил Fyf и Fyr передних и задних колес и углов βtf и βtr скольжения передних и задних колес, вычисляемыми посредством модуля 47 вычисления Fy/βt. Таким образом, модуль 48 вычисления состояния сцепления шины оценивает μ-градиент передних колес и μ-градиент задних колес. С этой целью, модуль 48 вычисления состояния сцепления шины имеет трехмерную характеристическую карту μ-градиента, показанную на фиг.29. Модуль 48 вычисления состояния сцепления шины имеет такие трехмерные характеристические карты μ-градиента для передних колес и для задних колес. Например, модуль 48 вычисления состояния сцепления шины размещает трехмерные характеристические карты μ-градиента сохраненными в носителе хранения данных, таком как запоминающее устройство.
Трехмерные характеристические карты μ-градиента подготавливаются на основе данных, полученных посредством выполнения теста прямого движения и теста поворотного движения на заданной эталонной поверхности дороги, заранее. В частности, фактическое измерение выполняется для характеристической кривой скорости скольжения и продольной силы посредством эксперимента ускорения на прямой для фактического транспортного средства на эталонной поверхности дороги. Кроме того, фактическое измерение выполняется для характеристической кривой поперечной силы (силы, возникающей при повороте) и угла скольжения шин посредством эксперимента, связанного с поворотом (предпочтительно, круговым движением при повороте с ускорением с постоянным радиусом поворота) для фактического транспортного средства на эталонной поверхности дороги. Трехмерные характеристические карты μ-градиента формируются из результатов фактических измерений. Когда непосредственное измерение является неосуществимым, можно измерять другую физическую величину и преобразовывать измеренную величину. Например, можно получать поперечные силы Fyf и Fyr передних и задних шин посредством измерения поперечного ускорения Gy и скорости γ поворота вокруг вертикальной оси и решения вышеуказанной системы уравнений (7), включающей в себя эти величины и параметры транспортного средства (см. фиг.36).
Соответственно, модуль 48 вычисления состояния сцепления шины получает μ-градиенты посредством поиска или анализа трехмерных характеристических карт μ-градиента. Фиг.37 показывает соотношение, чтобы получать μ-градиент из трехмерной карты μ-градиента, как соотношение между вводами и выводом трехмерной карты μ-градиента. Как показано на фиг.37, модуль 48 вычисления состояния сцепления шины упоминается как трехмерная характеристическая карта μ-градиента для передних колес, использует, в качестве вводов, соотношение (Fxf/λf) продольной силы Fxf передних колес и скорости λf скольжения передних колес и соотношения (Fyf/βtf) поперечной силы Fyf передних колес и угла βtf скольжения передних колес и вычисляет (или выводит) μ-градиент (γ/γ0) передних колес для передних колес, соответствующих вводам. Аналогично, модуль 48 вычисления состояния сцепления шины упоминается как трехмерная характеристическая карта μ-градиента для задних колес, использует, в качестве вводов, соотношение (Fxr/λr) продольной силы Fxr задних колес и скорости λr скольжения задних колес и соотношение (Fyr/βtr) поперечной силы Fyr задних колес и угла βtr скольжения задних колес и вычисляет (выводит) μ-градиент (γ/γ0) задних колес для задних колес, соответствующих вводам.
В этом случае, посредством этого, модуль 48 вычисления состояния сцепления шины определяет μ-градиент (γ/γ0) одной характеристической кривой (соответствующий двумерной характеристической карте μ-градиента), образующей трехмерную характеристическую карту μ-градиента (характеристическую поверхность). Таким образом, в трехмерной характеристической карте μ-градиента, как в двумерной характеристической карте μ-градиента (см. фиг.6 и 14), μ-градиент в форме наклона касательной характеристической кривой шины является параметром характеристики сцепления, переменной, представляющей состояние сцепления шины, или параметром, представляющим состояние насыщения силы, которую шина может создавать в поперечном направлении. Следовательно, из μ-градиента, система может определять то, что сила сцепления шины находится в предельной области. Как результат, система может оценивать допустимый запас силы сцепления шины для предела по трению надлежащим образом, даже когда сила сцепления колеса находится в предельной области.
Кроме того, модуль 48 вычисления состояния сцепления шины раскладывает каждый из μ-градиентов (γ/γ0) передних колес и задних колес на компонент, способствующий в продольном направлении, и компонент, способствующий в поперечном направлении. Без такого разложения вычисленный μ-градиент (γ/γ0) является величиной в направлении равнодействующей силы F из продольной силы Fx и поперечной силы Fy. μ-градиент (γ/γ0) в направлении равнодействующей силы F раскладывается на продольный компонент, способствующий в продольном направлении, и поперечный компонент, способствующий в поперечном направлении, и выводится. Компонент, способствующий в продольном направлении вычисленного μ-градиента (γ/γ0) (в дальнейшем называемый продольным компонентом μ-градиента), является пропорциональным μ-градиенту в продольном направлении колеса. Компонент, способствующий в поперечном направлении вычисленного μ-градиента (γ/γ0) (в дальнейшем называемый поперечным компонентом μ-градиента), является пропорциональным μ-градиенту в поперечном направлении колеса. Модуль 48 вычисления состояния сцепления шины выводит продольный компонент μ-градиента в модуль 49 вычисления команд коррекции продольной силы и выводит поперечный компонент μ-градиента в модуль 50 вычисления характеристик поворачиваемости.
Модуль 49 вычисления команд коррекции продольной силы выводит команду коррекции управления продольной силой в соответствии с продольным компонентом μ-градиента. Фиг.38 показывает пример процесса. Как показано на фиг.38, сначала на этапе S1, модуль 49 вычисления команд коррекции продольной силы определяет то, превышает продольный компонент μ-градиента заданное пороговое значение Kx1 или нет. Заданное пороговое значение Kx1 является экспериментальным значением, эмпирическим значением или теоретическим значением. Например, заданное пороговое значение Kx1 является произвольным положительным значением. Продольный компонент μ-градиента является величиной, полученной из μ-градиента, обезразмеренного в форме γ/γ0. Соответственно, заданное пороговое значение Kx1 является значением, определенным с учетом обезразмеривания.
Когда продольный компонент μ-градиента превышает заданное пороговое значение Kx1 (продольный компонент μ-градиента>Kx1), модуль 49 вычисления команд коррекции продольной силы переходит к этапу S2. Когда продольный компонент μ-градиента меньше или равен заданному пороговому значению Kx1 (продольный компонент μ-градиента≤Kx1), то модуль 49 вычисления команд коррекции продольной силы переходит к этапу S3. Когда продольный компонент μ-градиента составляет Kx0 в линейной области (области, в которой взаимосвязь между изменением в силе на колесе и изменением в степени скольжения является линейной), то Kx0 превышает заданное пороговое значение Kx1 (Kx0>Kx1).
На этапе S2, модуль 49 команды коррекции продольной силы определяет то, что шина находится в состоянии сцепления (состоянии более высокого сцепления), и выполняет обычное управление продольной силой (обычный режим управления). Соответственно, команда коррекции управления продольной силы не выводится в ECU 22 приводного/тормозного электродвигателя посредством модуля 49 команды коррекции продольной силы. Альтернативно, модуль 49 вычисления команд коррекции продольной силы выводит команду коррекции управления, позволяющую ECU 22 приводного/тормозного электродвигателя выполнять обычное управление продольной силой. Затем, модуль 49 вычисления команд коррекции продольной силы завершает процесс, показанный на фиг.38.
На этапе S3, модуль 49 вычисления команд коррекции продольной силы определяет то, превышает продольный компонент μ-градиента заданное пороговое значение Kx2 или нет. Заданное пороговое значение Kx2 является экспериментальным значением, эмпирическим значением или теоретическим значением. Заданное пороговое значение Kx2 меньше заданного порогового значения Kx1 (Kx2 Когда продольный компонент μ-градиента превышает заданное пороговое значение Kx2 (Kx1≥ продольный компонент μ-градиента >Kx2), модуль 49 вычисления команд коррекции продольной силы переходит к этапу S4. Когда продольный компонент μ-градиента меньше или равен заданному пороговому значению Kx2 (продольный компонент μ-градиента≤Kx2), то модуль 49 вычисления команд коррекции продольной силы переходит к этапу S5. На этапе S4, модуль 49 команды коррекции продольной силы определяет то, что состояние находится в нелинейном состоянии, но сила сцепления еще не достигла точки насыщения, и выполняет управление продольной силой для ограничения дополнительного увеличения продольной силы (режим управления для запрещения увеличения продольной силы). Соответственно, модуль 49 вычисления команд коррекции продольной силы выводит команду коррекции управления, чтобы ограничивать увеличение продольной силы на основе операции ускорения или операции торможения, в ECU 22 приводного/тормозного электродвигателя. Например, модуль 49 вычисления команд коррекции продольной силы выводит команду коррекции управления, которая задается равной значению для вычитания величины увеличения продольной силы вследствие операции ускорения или операции торможения. Затем, модуль 49 вычисления команд коррекции продольной силы завершает процесс, показанный на фиг.38. На этапе S5, модуль 49 вычисления команд коррекции продольной силы определяет то, что состояние находится в области, в которой сила сцепления насыщается, и выполняет управление продольной силой (режим управления для уменьшения продольной силы), чтобы восстанавливать силу сцепления посредством уменьшения продольной силы. Соответственно, модуль 49 вычисления команд коррекции продольной силы выводит, в ECU 22 приводного/тормозного электродвигателя, команду коррекции управления, чтобы уменьшать продольную силу (расходует продольную силу). Например, даже в случае операции ускорения или операции торможения, модуль 49 вычисления команд коррекции продольной силы выводит команду коррекции управления, чтобы уменьшать продольную силу при одновременном подавлении увеличения продольной силы вследствие этой операции. Затем, модуль 49 вычисления команд коррекции продольной силы завершает процесс по фиг.38. Как пояснено выше, модуль 49 вычисления команд коррекции продольной силы выполняет процесс в соответствии с продольным компонентом μ-градиента. Модуль 49 вычисления команд коррекции продольной силы выполняет этот процесс в соответствии с каждым из продольных компонентов μ-градиента передних колес и задних колес. Модуль 50 вычисления характеристик поворачиваемости определяет состояние поворачиваемости (поведение транспортного средства) в соответствии с поперечным компонентом μ-градиента согласно процессу определения. Фиг.39 показывает пример процесса определения. Как показано на фиг.39, сначала на этапе S11, модуль 50 вычисления характеристик поворачиваемости вычисляет статический допустимый запас SM, выступающий в качестве индекса поведения транспортного средства. Модуль 50 вычисления характеристик поворачиваемости этого примера вычисляет статический допустимый запас SM в соответствии с поперечными компонентами Kf и Kr μ-градиента передних и задних колес посредством использования следующего выражения (8). Математическое выражение 8:

Статический допустимый запас SM является величиной, указывающей легкость возникновения сноса и заноса. Кроме того, статический допустимый запас SM является величиной, указывающей состояние насыщения поперечной силы шины. Например, когда состояние сцепления передних колес 11FL, 11FR достигает предела (поперечная сила шины становится насыщенной), и поперечный компонент Kf μ-градиента передних колес становится нулевым или отрицательным, статический допустимый запас SM становится меньшим. Таким образом, статический допустимый запас SM становится меньшим, когда вероятность сноса увеличивается в состоянии (состоянии насыщения силы на колесе), в котором сила на колесе не увеличивается на передних колесах независимо от увеличения степени скольжения.
На следующем этапе S12 модуль 50 вычисления характеристик поворачиваемости определяет то, равен статический допустимый запас SM, вычисляемый на S11, нулю или нет. Модуль 50 вычисления характеристик поворачиваемости переходит к этапу S13, когда статический допустимый запас SM равен нулю (SM=0) и этапу S14, когда статический допустимый запас SM не равен нулю (SM≠0). По своему усмотрению можно определять то, что статический допустимый запас SM равен нулю, когда статический допустимый запас SM находится в рамках заданного диапазона, включающего в себя нуль.
На этапе S14, модуль 50 вычисления характеристик поворачиваемости определяет то, является статический допустимый запас SM положительным или нет. Модуль 50 вычисления характеристик поворачиваемости переходит к этапу S15, когда статический допустимый запас SM является положительным (SM>0), и к этапу S16, когда статический допустимый запас SM не является положительным (SM<0).
На этапе S13, модуль 50 вычисления характеристик поворачиваемости определяет то, что характеристика поворачиваемости транспортного средства представляет тенденцию нейтральной управляемости (вероятность возникновения нейтральной управляемости является высокой). На этапе S15, модуль 50 вычисления характеристик поворачиваемости определяет то, что характеристика поворачиваемости транспортного средства представляет тенденцию недостаточной управляемости (вероятность возникновения недостаточной управляемости является высокой). На этапе S16, модуль 50 вычисления характеристик поворачиваемости определяет то, что характеристика поворачиваемости транспортного средства представляет тенденцию избыточной управляемости (вероятность возникновения избыточной управляемости является высокой). Модуль 50 вычисления характеристик поворачиваемости выводит результат определения в модуль 51 вычисления команд помощи при повороте.
Таким образом, модуль 50 вычисления характеристик поворачиваемости выполняет операции в соответствии с поперечными компонентами μ-градиента передних и задних колес.
Модуль 51 вычисления команд помощи при повороте вычисляет команду помощи при повороте в соответствии с результатом определения модуля 50 вычисления характеристик поворачиваемости. Фиг.40 показывает пример процесса, выполняемого посредством модуля 51 вычисления команд помощи при повороте. Как показано на фиг.40, сначала, на этапе S21, модуль 51 вычисления команд помощи при повороте определяет то, представляет характеристика поворачиваемости тенденцию нейтральной управляемости (SM=0) или нет. Когда характеристика поворачиваемости представляет тенденцию нейтральной управляемости, то модуль 51 вычисления команд помощи при повороте завершает процесс по фиг.40. Иначе (когда SM≠0, в случае тенденции недостаточной управляемости или тенденции избыточной управляемости), модуль 51 вычисления команд помощи при повороте переходит к этапу S22.
На этапе S22, модуль 51 вычисления команд помощи при повороте определяет то, представляет характеристика поворачиваемости тенденцию недостаточной управляемости (SM>0) или нет. Модуль 51 вычисления команд помощи при повороте переходит к этапу S23, когда характеристика поворачиваемости представляет тенденцию недостаточной управляемости (вероятность возникновения недостаточной управляемости является высокой), и переходит к этапу S25 иначе (SM≤0, тенденция избыточной управляемости).
На этапе S23, модуль 51 вычисления команд помощи при повороте определяет то, меньше поперечный компонент (поперечное сцепление) μ-градиента передних колес заданного порогового значения Ky1 или нет. Заданное пороговое значение Ky1 является экспериментальным значением, эмпирическим значением или теоретическим значением. Например, заданное пороговое значение Ky1 является значением, близким к нулю. Поперечный компонент μ-градиента является величиной, полученной из μ-градиента, обезразмеренного в форме γ/γ0. Соответственно, заданное пороговое значение Ky1 является значением, определенным с учетом обезразмеривания.
Модуль 51 вычисления команд помощи при повороте переходит к этапу S24, когда поперечный компонент μ-градиента передних колес меньше заданного порогового значения Ky1 (поперечный компонент μ-градиента На этапе S24, модуль 51 вычисления команд помощи при повороте определяет то, что вероятность сноса транспортного средства является высокой, и выполняет управление величиной обратной связи на руле EPS. В частности, модуль 51 вычисления команд помощи при повороте выводит команду помощи при повороте для добавления величины обратной связи на руле в направлении, ограничивающем операцию руления водителя в направлении поворота от полностью нейтрального положения, в EPSECU 6. Затем, модуль вычисления команд помощи в рулении 51 завершает процесс, показанный на фиг.40. На этапе S25, модуль 51 вычисления команд помощи при повороте определяет то, меньше поперечный компонент μ-градиента передних колес заданного порогового значения Ky2 или нет. Заданное пороговое значение Ky2 является экспериментальным значением, эмпирическим значением или теоретическим значением. Заданное пороговое значение Ky2 может задаваться равным заданному пороговому значению Ky1 или может задаваться равным значению, отличному от заданного порогового значения Ky1. Например, заданное пороговое значение Ky2 является значением, близким к нулю. Поперечный компонент μ-градиента является величиной, полученной из μ-градиента, обезразмеренного в форме γ/γ0. Соответственно, заданное пороговое значение Ky2 является значением, определенным с учетом обезразмеривания. Модуль 51 вычисления команд помощи при повороте переходит к этапу S26, когда поперечный компонент μ-градиента передних колес меньше заданного порогового значения (поперечный компонент μ-градиента На этапе S26, модуль 51 вычисления команд помощи при повороте определяет то, что вероятность заноса транспортного средства является высокой, и выполняет управление величиной обратной связи на руле EPS. В частности, модуль 51 вычисления команд помощи при повороте выводит команду помощи при повороте, чтобы добавлять величину обратной связи на руле в направлении для вынуждения выполнения операции руления водителем в обратном направлении к нейтральному положению, в EPSECU 6. Таким образом, крутящий момент добавляется, чтобы помогать противодействовать скольжению (возвращающее руление). Затем, модуль 51 вычисления команд помощи при повороте завершает процесс согласно фиг.40. Таким образом, модуль 51 вычисления команд помощи при повороте выполняет операции на основе результата определения модуля 50 вычисления характеристик поворачиваемости. Действия и операции Фиг.41 показывает один пример процесса в устройстве 8 оценки состояния движения транспортного средства. Устройство 8 оценки состояния движения транспортного средства выполняет этот процесс в ходе движения или перемещения транспортного средства. Сначала, в устройстве 8 оценки состояния движения транспортного средства, модуль 41 вычисления скорости кузова транспортного средства вычисляет скорость кузова транспортного средства (этап S31). В устройстве 8 оценки состояния движения транспортного средства, модуль 42 оценки скорости скольжения вычисляет скорость λf скольжения передних колес и скорость λr скольжения задних колес в соответствии со скоростью кузова транспортного средства (этап S32). Кроме того, модуль 44 оценки угла скольжения шин в устройстве 8 оценки состояния движения транспортного средства вычисляет угол βtf скольжения передних колес и угол βtr скольжения задних колес (этап S33). В устройстве 8 оценки состояния движения транспортного средства, модуль 43 оценки продольной силы вычисляет продольную силу Fxf передних колес и продольную силу Fxr задних колес (этап S34). Кроме того, модуль 45 оценки поперечной силы в устройстве 8 оценки состояния движения транспортного средства вычисляет поперечную силу Fyf передних колес и поперечную силу Fyr задних колес (этап S35). В устройстве 8 оценки состояния движения транспортного средства, модуль 46 вычисления Fx/λ вычисляет соотношения (Fxf/λf, Fxr/λr) продольной силы Fxf, Fxr к скорости (λf, λr) скольжения (этап S36). Кроме того, модуль 47 вычисления Fy/βt вычисляет соотношения (Fyf/βtf, Fyr/βtr) поперечной силы Fyf, Fyr к углу βtf, βtr скольжения (этап S37). Затем, модуль 48 вычисления состояния сцепления шины в устройстве 8 оценки состояния движения транспортного средства оценивает μ-градиент (параметр характеристики сцепления) на основе трехмерной характеристической карты μ-градиента (этап S38). Таким образом, модуль 48 вычисления состояния сцепления шины вычисляет μ-градиент (γ/γ0) для каждой пары передних колес и пары задних колес в ходе движения, соответствующий соотношению (Fx/λ) продольной силы Fxf или Fxr к скорости λf или λr скольжения и соотношению (Fy/βt) поперечной силы Fyf или Fyr к углу βtf или βtr скольжения, посредством использования трехмерной характеристической карты μ-градиента для передних колес или трехмерной характеристической карты μ-градиента для задних колес. Затем, модуль 48 вычисления состояния сцепления шины раскладывает каждый из μ-градиента передних колес и μ-градиента задних колес (γ/γ0) на компонент, влияющий в продольном направлении (продольный компонент μ-градиента), и компонент, влияющий в поперечном направлении (поперечный компонент μ-градиента) (этап S39). В устройстве 8 оценки состояния движения транспортного средства, модуль 49 вычисления команд коррекции продольной силы выводит команду коррекции управления для продольной силы (т.е. каждой из продольной силы передних колес и продольной силы задних колес) в соответствии с продольным компонентом μ-градиента передних колес или задних колес (этап S40). С другой стороны, модуль 50 оценки характеристики поворачиваемости в устройстве 8 оценки состояния движения транспортного средства определяет состояние поворачиваемости (поведение транспортного средства) в соответствии с поперечным компонентом μ-градиента передних колес и поперечным компонентом μ-градиента задних колес (этап S41). В соответствии с результатом определения модуля 50 оценки характеристики поворачиваемости, модуль 51 вычисления команд помощи при повороте вычисляет команду помощи при повороте для управления для добавления величины обратной связи на руле (EPS-управление) (этап S42). Таким образом, устройство 8 оценки состояния движения кузова транспортного средства выполняет управление продольной силой и управление величиной обратной связи на руле следующим образом в соответствии с продольным компонентом и поперечным компонентом μ-градиента (параметром характеристики сцепления). Таким образом, когда продольный компонент μ-градиента превышает заданное пороговое значение Kx1 (продольный компонент μ-градиента>Kx1), устройство 8 оценки состояния движения транспортного средства определяет то, что колесо, удовлетворяющее этому состоянию, находится в состоянии сцепления, и выполняет обычное управление продольной силой (обычный режим управления) (S1→S2). Кроме того, когда продольный компонент μ-градиента меньше или равен заданному пороговому значению Kx1 и превышает заданное пороговое значение Kx2 (Kx1≥продольный компонент μ-градиента>Kx2), то устройство 8 оценки состояния движения кузова транспортного средства выполняет управление продольной силой, чтобы ограничивать увеличение продольной силы для колеса, удовлетворяющего этому состоянию (режим управления для запрещения увеличения продольной силы) (S1→ S3→ S4). Соответственно, система может не допускать насыщения силы сцепления посредством увеличения продольной силы, вызываемой посредством операции ускорения или операции торможения от водителя. Посредством выполнения этих процессов, когда водитель выполняет операцию ускорения или операцию торможения (когда запрос на увеличение продольной силы формируется) в то время, когда продольный компонент μ-градиента превышает заданное пороговое значение Kx1, то продольная сила увеличивается до тех пор, пока продольный компонент μ-градиента не становится меньшим или равным заданному пороговому значению Kx1 (до тех пор, пока управление не переходит в режим запрещения увеличения продольной силы). Кроме того, когда продольный компонент μ-градиента меньше или равен заданному пороговому значению Kx1 и превышает заданное пороговое значение Kx2 (Kx1≥продольный компонент μ-градиента>Kx2), то устройство 8 оценки состояния движения кузова транспортного средства выполняет управление продольной силой, чтобы ограничивать увеличение продольной силы для колеса, удовлетворяющего этому состоянию (режим управления для запрещения увеличения продольной силы) (S1→ S3→ S5). При этом управлении, даже если сила сцепления насыщается, система может восстанавливать силу сцепления. В вышеуказанном процессе устройство 8 оценки состояния движения транспортного средства определяет состояние сцепления колеса только посредством сравнения продольного компонента μ-градиента с заданными пороговыми значениями Kx1 и Kx2. Посредством этого, устройство 8 оценки состояния движения транспортного средства оценивает допустимый запас для предела по трению адекватно и выполняет управление продольной силой, подходящее для оцененного допустимого запаса, даже когда сила сцепления колеса находится в состоянии предела (состоянии насыщения или состоянии около состояния насыщения). Кроме того, в соответствии с поперечным компонентом μ-градиента, устройство 8 оценки состояния движения транспортного средства вычисляет статический допустимый запас SM (S11). В соответствии с вычисленным статическим допустимым запасом SM, устройство 8 оценки состояния движения транспортного средства определяет состояние поворачиваемости (поведение транспортного средства) и выполняет управление продольной силой на основе результата определения. В частности, устройство 8 оценки состояния движения транспортного средства определяет то, что характеристика поворачиваемости представляет тенденцию недостаточной управляемости, когда статический допустимый запас SM является положительным (SM>0) (на этапе S15). В этом случае, устройство 8 оценки состояния движения транспортного средства выполняет управление, чтобы добавлять величину обратной связи на руле в направлении, ограничивающем операцию руления от водителя от нейтрального положения, при условии, что поперечный компонент μ-градиента передних колес меньше заданного порогового значения Ky1 (S21→ S22→ S23→ S24). Таким образом, когда параметр характеристики сцепления уменьшается, система выполняет управление, чтобы увеличивать угол скольжения шин, и тем самым предотвращает снос транспортного средства. Кроме того, устройство 8 оценки состояния движения транспортного средства определяет то, что характеристика поворачиваемости представляет тенденцию избыточной управляемости, когда статический допустимый запас SM является отрицательным (SM<0) (на этапе S16). В этом случае, устройство 8 оценки состояния движения транспортного средства выполняет управление, чтобы добавлять величину обратной связи на руле в направлении для инструктирования водителю выполнять операцию обратного руления к полностью нейтральному положению при условии, что поперечный компонент μ-градиента передних колес меньше заданного порогового значения Ky2 (S21→ S22→ S25→ S26). При этом управлении, система управления добавляет крутящий момент, чтобы помогать противодействовать скольжению (возвращающее руление), и тем самым предотвращает занос транспортного средства. В этом процессе, также, система определяет состояние сцепления колеса только посредством сравнения поперечного компонента μ-градиента с заданными пороговыми значениями Ky1 и Ky2. Посредством этого, система оценивает допустимый запас для предела по трению адекватно и выполняет управление для добавления величины обратной связи на руле, подходящее для оцененного допустимого запаса, даже когда сила сцепления колеса находится в состоянии предела (состоянии насыщения или состоянии около состояния насыщения). Модификации первого варианта осуществления изобретения (1) Можно модифицировать μ-градиент в соответствии с варьированием нагрузки на колесо. Фиг.42 показывает характеристическую кривую (соответствующую двумерной характеристической карте μ-градиента), образующую трехмерную характеристическую карту μ-градиента (характеристическую поверхность). Как показано на фиг.42, нагрузка на колесо варьируется посредством умножения первоначального значения Fz нагрузки на колесо (значения нагрузки на колесо, полученного, когда нет варьирования) на 0,6, 0,8 и 1,2. Характеристическая кривая, представляющая взаимосвязь между соотношением (F/Z) равнодействующей силы F и степени Z скольжения и μ-градиентом, варьируется в зависимости от нагрузки на колесо. В частности, характеристическая кривая варьируется по форме аналогичных характеристических кривых (группы характеристических кривых), имеющих различные размеры в зависимости от нагрузки на колесо и имеющих похожие формы, аналогично похожим чертежам, имеющим различные размеры. Фиг.43 показывает варьирование характеристической кривой в зависимости от нагрузки на колесо в форме взаимосвязи нагрузки на колесо и усиления Kw модификации (коэффициента модификации) для увеличения и сокращения характеристической кривой. Как показано на фиг.43, усиление Kw модификации увеличивается по мере того, как нагрузка на колесо увеличивается. Кроме того, скорость увеличения усиления Kw модификации уменьшается по мере того, как нагрузка на колесо увеличивается. Фиг.44 показывает один пример конструкции для корректирования μ-градиента в соответствии с варьированием нагрузки на колесо. Как показано на фиг.44, предусмотрены модуль 52 вычисления нагрузки на колесо и модуль 53 модификации карты. Модуль 52 вычисления нагрузки на колесо вычисляет варьирование нагрузки на колесо в соответствии с поперечным ускорением, считываемым посредством датчика 3 поперечного ускорения, и продольным ускорением, считываемым посредством датчика 4 продольного ускорения. В частности, модуль 52 вычисления нагрузки на колесо вычисляет значение варьирования нагрузки на колесо, соответствующее поперечному ускорению и продольному ускорению. Модуль 52 вычисления нагрузки на колесо выводит результат вычисления в модуль 53 модификации карты. Модуль 53 модификации карты модифицирует трехмерную характеристическую карту μ-градиента посредством использования усиления Kw модификации, показанного на фиг.43. В этом примере, характеристическая кривая, показанная на фиг.43, получается заранее, как карта коэффициентов модификации нагрузки и т.п., из результатов теста с использованием машины для тестирования шин. Модуль 53 модификации карты определяет значение усиления Kw коррекции, соответствующее измеренному значению нагрузки на колесо, посредством использования карты коэффициентов модификации нагрузки и корректирует μ-градиент. В частности, модуль 53 модификации карты умножает ввод(ы) в трехмерную карту μ-градиента (см. фиг.37) на 1/Kw и умножает вывод трехмерной карты μ-градиента (см. фиг.37) на Kw. (2) Кроме того, можно подготавливать множество трехмерных характеристических карт μ-градиента (характеристических поверхностей), соответствующих нагрузке на колесо, как показано на фиг.45, чтобы модифицировать градиент в соответствии с варьированием нагрузки на колесо. В этом случае, трехмерная характеристическая карта μ-градиента (характеристическая поверхность), используемая для вычисления μ-градиента, указывается или выбирается в соответствии с измеренным значением нагрузки на колесо. (3) В первом варианте осуществления заданное нелинейное соотношение между двумя входными переменными Fx/λ и Fy/βt и выходной переменной, которая является параметром характеристики сцепления (μ-градиентом), имеет форму характеристической карты или характеристического чертежа. В отличие от этого, по своему усмотрению можно рассматривать такое нелинейное соотношение в форме математического выражения(й). Кроме того, если возможно, по своему усмотрению можно упрощать нелинейное соотношение в линейную зависимость. (4) В первом варианте осуществления трехмерная характеристическая карта μ-градиента получается посредством качания продольной силы и поперечной силы одновременно в различных направлениях, т.е. посредством сдвига направления равнодействующей силы в ширину. Вместо этого, по своему усмотрению можно получать трехмерную характеристическую карту μ-градиента посредством получения характеристической карты μ-градиента продольного направления (продольной силы Fx) (двумерной характеристической карты μ-градиента) и характеристической карты μ-градиента поперечного направления (поперечной силы Fy) (двумерной характеристической карты μ-градиента) по отдельности и дополнения зазора между этими характеристическими картами μ-градиента. В этом случае, зазор между характеристическими картами μ-градиента дополняется посредством использования эллиптического приближения. (5) В первом варианте осуществления система выполнена с возможностью управлять поведением при повороте или поведением в поперечном направлении транспортного средства посредством выполнения управления рулением (управления для добавления величины обратной связи на руле). Тем не менее, система может управлять поведением транспортного средства посредством управления движением при повороте посредством разности между продольными силами левых и правых колес, такой как VDC (динамическое управление транспортным средством). В этом случае, система может реализовывать более чувствительное управление для стабилизации поведения транспортного средства (управление для предотвращения бокового скольжения). (6) В первом варианте осуществления транспортное средство является транспортным средством с управлением от передних колес. Тем не менее, транспортное средство может быть транспортным средством с управлением от задних колес, имеющим управляемое заднее колесо(а). (7) В первом варианте осуществления система выполнена с возможностью определять характеристику транспортного средства или управлять поведением транспортного средства в соответствии с μ-градиентом передних колес (параметром характеристики сцепления) и μ-градиентом задних колес (параметром характеристики сцепления). Тем не менее, система может определять характеристику транспортного средства или управлять поведением транспортного средства в соответствии с μ-градиентом левых колес (параметром характеристики сцепления) и μ-градиентом правых колес (параметром характеристики сцепления). (8) В первом варианте осуществления система включает в себя модуль 49 вычисления команд коррекции продольной силы, чтобы управлять продольной силой в соответствии с μ-градиентом, и модуль 50 вычисления характеристик поворачиваемости и модуль 51 вычисления команд помощи, чтобы управлять добавлением величины обратной связи на руле в соответствии с μ-градиентом. Тем не менее, система может включать в себя только один из модуля 49 вычисления команд коррекции продольной силы и модуля 51 вычисления команд помощи (включающего в себя модуль 50 вычисления характеристик поворачиваемости). Таким образом, система может осуществлять только одно из управления продольной силой и управления для добавления величины обратной связи на руле. В первом варианте осуществления каждая конструкция, включающая в себя модуль 42 оценки скорости скольжения, модуль 43 оценки продольной силы и модуль 46 вычисления Fx/λ, и конструкция, включающая в себя модуль 44 оценки угла скольжения шин, модуль 45 оценки поперечной силы и модуль 47 вычисления Fy/βt, реализует один из модуля первого ввода для задания первого ввода, который является соотношением первой силы на колесе, действующей на колесо в первом направлении на поверхности контакта земли, к первой степени скольжения колеса для колеса, и модуля второго ввода для задания второго ввода, который является соотношением второй силы на колесе, действующей на колесо во втором направлении, отличном от первого направления на поверхности контакта земли, ко второй степени скольжения колеса для колеса. Кроме того, модуль 48 оценки состояния сцепления шины реализует модуль вывода для определения вывода, который является параметром характеристики сцепления, представляющим характеристику сцепления колеса, в соответствии с первым и вторым вводами, заданными посредством модулей первого и второго ввода. Таким образом, устройство оценки состояния трения поверхности контакта земли и транспортного средства реализуется, в первом варианте осуществления, посредством модуля 42 оценки скорости скольжения, модуля 43 оценки продольной силы, модуля 46 вычисления Fx/λ, модуля 44 оценки угла скольжения шин, модуля 45 оценки поперечной силы, модуля 47 вычисления Fy/βt и модуля 48 вычисления состояния сцепления шины. В этом варианте осуществления, один из модуля 43 оценки продольной силы и модуля 45 оценки поперечной силы реализует модуль определения первой силы на колесе для определения первой силы на колесе. Один из модуля 42 оценки скорости скольжения и модуля 44 оценки угла скольжения шин реализует модуль определения первой степени скольжения колеса для определения первой степени скольжения колеса. Один из модуля 46 вычисления Fx/λ и модуля 47 вычисления Fy/βt реализует первый модуль деления для определения соотношения первой силы на колесе к первой степени скольжения колеса посредством деления первой силы на колесе, определенной посредством модуля определения первой силы на колесе, на первую степень скольжения колеса, определенную посредством модуля определения первой степени скольжения колеса. Другой из модуля 43 оценки продольной силы и модуля 45 оценки поперечной силы реализует модуль определения второй силы на колесе для определения второй силы на колесе. Другой из модуля 42 оценки скорости скольжения и модуля 44 оценки угла скольжения шин реализует модуль определения второй степени скольжения колеса для определения второй степени скольжения колеса. Другой из модуля 46 вычисления Fx/λ и модуля 47 вычисления Fy/βt реализует второй модуль деления для определения соотношения второй силы на колесе ко второй степени скольжения колеса посредством деления второй силы на колесе, определенной посредством модуля определения второй силы на колесе, на вторую степень скольжения колеса, определенную посредством модуля определения второй степени скольжения колеса. В первом варианте осуществления модуль 48 вычисления состояния сцепления шины (трехмерная характеристическая карта μ-градиента) реализует модуль вывода, чтобы определять параметр характеристики сцепления только из соотношения первой силы на колесе и первой степени скольжения и соотношения второй силы на колесе и второй степени скольжения без использования коэффициента трения поверхности земли. Кроме того, модуль 48 вычисления состояния сцепления шины (трехмерная характеристическая карта μ-градиента) реализует модуль вывода, чтобы определять параметр характеристики сцепления в соответствии с соотношением первой силы на колесе и первой степени скольжения в нелинейной области, в которой первая сила на колесе варьируется нелинейно с первой степенью скольжения, и соотношением второй силы на колесе и второй степенью скольжения в нелинейной области, в которой вторая сила на колесе варьируется нелинейно со второй степенью скольжения. В первом варианте осуществления модуль 48 вычисления состояния сцепления шины (трехмерная характеристическая карта μ-градиента) реализует модуль вывода, чтобы определять параметр характеристики сцепления из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса согласно заданной нелинейной взаимосвязи между двумя входными переменными, представленными посредством двух вводов, и выходной переменной, представленной посредством вывода. В этом случае, μ-градиент реализует параметр характеристики сцепления, который является величиной, представляющей допустимый запас для предела по трению шины. В первом варианте осуществления скорость λ скольжения и угол βt скольжения являются степенями скольжения колеса (первой и второй степенями скольжения колес), которые являются степенями скольжения колеса транспортного средства относительно поверхности земли в направлении продольной силы Fx и направлении поперечной силы Fy, модуль 48 вычисления состояния сцепления шины (трехмерная характеристическая карта μ-градиента) реализует модуль вывода, выполненный с возможностью определять параметр характеристики сцепления только из соотношения первой силы на колесе и первой степени скольжения и соотношения второй силы на колесе и второй степени скольжения без использования коэффициента трения поверхности земли. В первом варианте осуществления скорость λ скольжения и угол βt скольжения являются величинами, представляющими вектор относительной скорости колеса транспортного средства относительно поверхности земли в направлении силы на колесе (первой и второй силы на колесе). Модуль 48 вычисления состояния сцепления шины (трехмерная характеристическая карта μ-градиента) реализует модуль вывода, выполненный с возможностью определять параметр характеристики сцепления только из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса без использования коэффициента трения поверхности земли. В первом варианте осуществления каждая из продольной силы и поперечной силы является одним из первой и второй сил на колесе, которые являются силами на шине в первом и втором направлениях, действующими на шину. μ-градиент (параметр характеристики сцепления) является величиной, представляющей градиент характеристической кривой шины равнодействующей силы на шине относительно результирующей степени скольжения колеса, при этом результирующая степень скольжения колеса является степенью скольжения колеса, сформированной в направлении (направлении равнодействующей силы F) комбинации первой силы на колесе и второй силы на колесе, и равнодействующая сила на шине является комбинированной силой на шине, являющейся результатом первой силы на колесе и второй силы на колесе. Модуль 48 вычисления состояния сцепления шины (характеристическая карта μ-градиента) реализует модуль вывода, выполненный с возможностью определять градиент характеристической кривой шины только из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса без использования коэффициента трения поверхности земли. В первом варианте осуществления характеристическая кривая шины (например, показанная на фиг.23 и фиг.24) реализует характеристическую кривую шины, включающую в себя линейный сегмент, в котором равнодействующая сила на шине увеличивается линейно от нуля, когда абсолютное значение результирующей степени скольжения колеса увеличивается от нуля в области меньшего скольжения, в которой результирующая степень скольжения колеса меньше, и нелинейный сегмент, в котором равнодействующая сила на шине варьируется нелинейно, когда абсолютное значение результирующей степени скольжения колеса увеличивается в области большего скольжения, в которой абсолютное значение результирующей степени скольжения колеса увеличивается за пределы области меньшего скольжения. Параметр характеристики сцепления увеличивается от нуля до наибольшего значения параметра, когда, по меньшей мере, одно из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса увеличивается. Наибольшее значение параметра представляет градиент линейного сегмента характеристической кривой шины. Модуль 48 вычисления состояния сцепления шины (характеристическая карта μ-градиента) реализует модуль вывода, выполненный с возможностью определять градиент нелинейного сегмента характеристической кривой шины из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса. В первом варианте осуществления характеристическая кривая шины включает в себя характеристическую кривую шины в случае высокого трения для поверхности дороги с более высоким трением, имеющей более высокий коэффициент трения, и характеристическую кривую шины в случае низкого трения для поверхности дороги с более низким трением, имеющей более низкий коэффициент трения, ниже более высокого коэффициента трения. μ-градиент (параметр характеристики сцепления) является величиной, представляющей градиенты характеристики шины в случае высокого трения и характеристики шины в случае низкого трения. Модуль 42 оценки скорости скольжения, модуль 43 оценки продольной силы, модуль 46 вычисления Fx/λ, модуль 44 оценки угла скольжения шин, модуль 45 оценки поперечной силы и модуль 47 вычисления Fy/βt реализуют модули вывода, выполненные с возможностью определения текущего значения соотношения силы на колесе и степени скольжения колеса из текущего значения силы на шине и текущего значения степени скольжения колеса. Модуль 48 вычисления состояния сцепления шины (характеристическая карта μ-градиента) реализует модуль вывода, который определяет текущее значение параметра характеристики сцепления из текущих значений соотношений силы на колесе и степени скольжения колеса и задавать значение градиента характеристической кривой шины в случае высокого трения, соответствующее текущему значению силы на шине и текущему значению степени скольжения колеса, и значение градиента характеристической кривой шины в случае низкого трения, соответствующее текущему значению силы на шине и текущему значению степени скольжения колеса, равными друг другу и равными текущему значению параметра характеристики сцепления. В первом варианте осуществления характеристическая кривая шины является характеристической кривой, представляющей характеристику шины, зависящую от коэффициента трения поверхности дороги. Модуль 48 вычисления состояния сцепления шины (характеристическая карта μ-градиента) реализует модуль вывода, выполненный с возможностью определения градиента характеристической кривой шины только из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса без использования коэффициента трения поверхности дороги. В первом варианте осуществления μ-градиент (параметр характеристики сцепления) является функцией, возрастающей, когда, по меньшей мере, одно из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса увеличивается от заданного критического значения соотношения. Заданное критическое значение соотношения является значением соотношения первой силы на колесе и первой степени скольжения колеса или значением соотношения второй силы на колесе и второй степени скольжения колеса, когда μ-градиент равен нулю. В области большего соотношения, превышающего заданное критическое значение соотношения, когда, по меньшей мере, одно из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса увеличивается, параметр характеристики сцепления увеличивается нелинейно так, что скорость увеличения параметра характеристики сцепления относительно увеличения этого соотношения силы на колесе и степени скольжения колеса увеличивается. В первом варианте осуществления в трехмерной характеристической карте μ-градиента, параметр характеристики сцепления равен заданному критическому значению параметра, когда соотношение первой силы на колесе и первой степени скольжения и соотношение второй силы на колесе и второй степени скольжения колеса равны заданному критическому значению или значениям соотношения. Альтернативно, параметр характеристики сцепления равен заданному критическому значению параметра, когда одно из соотношения первой силы на колесе и первой степени скольжения и соотношения второй силы на колесе и второй степени скольжения колеса равно наибольшему значению в диапазоне этого соотношения, а другое из соотношения первой силы на колесе и первой степени скольжения и соотношения второй силы на колесе и второй степени скольжения колеса равно заданному критическому значению соотношения. Кроме того, в трехмерной характеристической карте μ-градиента, параметр характеристики сцепления уменьшается ниже критического значения параметра, когда, по меньшей мере, одно из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса уменьшается ниже критического значения соотношения. В трехмерной характеристической карте μ-градиента параметр характеристики сцепления увеличивается выше критического значения параметра, когда соотношение первой силы на колесе и первой степени скольжения колеса и соотношение второй силы на колесе и второй степени скольжения колеса увеличиваются выше критического значения или значений соотношения. В первом варианте осуществления модуль 49 вычисления команд коррекции продольной силы реализует модуль управления. В частности, режим управления для уменьшения продольной силы модуля 49 вычисления команд коррекции продольной силы реализует управление для восстановления сцепления, чтобы увеличивать параметр характеристики сцепления выше критического значения параметра в критической области, в которой параметр характеристики сцепления меньше или равен критическому значению параметра (соответствующему заданному пороговому значению Kx1). Режим управления для запрещения увеличения продольной силы модуля 49 вычисления команд коррекции продольной силы реализует управление для предотвращения снижения сцепления, чтобы предотвращать снижение параметра характеристики сцепления до критического значения параметра, когда параметр характеристики сцепления находится в критической области, в которой параметр характеристики сцепления превышает критическое значение параметра, но меньше заданного порогового значения параметра (соответствующего заданному пороговому значению Kx1), которое превышает критическое значение параметра. Обычный режим управления модуля 49 вычисления команд коррекции продольной силы реализует управление состоянием сцепления, которое выполняется, когда параметр характеристики сцепления превышает пороговое значение параметра. В первом варианте осуществления модуль 50 вычисления характеристик поворачиваемости реализует модуль оценки стабильности, чтобы оценивать параметр стабильности транспортного средства, представляющий стабильность транспортного средства, из параметра характеристики сцепления. Кроме того, модуль 50 вычисления характеристик поворачиваемости реализует модуль оценки стабильности, выполненный с возможностью оценки параметра стабильности транспортного средства из параметра характеристики сцепления первого колеса (одного из передних и задних колес или одного из левого и правого колеса) и параметра характеристики сцепления второго колеса (другого из передних и задних колес или другого из левого и правого колеса). В первом варианте осуществления модуль 51 вычисления команд помощи при повороте реализует модуль управления стабильностью транспортного средства, чтобы управлять транспортным средством в соответствии с параметром стабильности транспортного средства. Кроме того, в первом варианте осуществления модуль 49 вычисления команд коррекции продольной силы и модуль 50 вычисления характеристик поворачиваемости реализуют модуль оценки поведения транспортного средства, чтобы оценивать поведение транспортного средства в соответствии с параметром характеристики сцепления. В первом варианте осуществления модуль 48 вычисления состояния сцепления шины реализует модуль разложения, чтобы раскладывать параметр характеристики сцепления на поперечный компонент в поперечном направлении и продольный компонент в продольном направлении. Модуль 50 вычисления характеристик поворачиваемости реализует модуль оценки поперечного поведения, чтобы оценивать поперечное поведение транспортного средства в поперечном направлении в соответствии с поперечным компонентом параметра характеристики сцепления, раскладываемого посредством модуля разложения. В частности, модуль 50 вычисления характеристик поворачиваемости реализует модуль 50 оценки поведения транспортного средства реализует модуль оценки поведения транспортного средства (модуль оценки продольного поведения, который оценивает поперечное поведение транспортного средства в поперечном направлении в соответствии с поперечным компонентом параметра характеристики сцепления первого колеса (одного из передних и задних колес) транспортного средства и параметра характеристики сцепления второго колеса (другого из передних и задних колес) транспортного средства. Модуль 50 вычисления характеристик поворачиваемости реализует модуль оценки характеристики поворачиваемости, чтобы оценивать характеристику поворачиваемости транспортного средства из параметра характеристики сцепления. Модуль 49 вычисления команд продольной коррекции имеет функцию модуля оценки продольного поведения, чтобы оценивать продольное поведение транспортного средства в продольном направлении в соответствии с продольным компонентом параметра характеристики сцепления, раскладываемого посредством модуля разложения. Можно предоставлять, по меньшей мере, один из модуля оценки поперечного поведения транспортного средства и модуля оценки продольного поведения. В первом варианте осуществления модуль 49 вычисления команд коррекции продольной силы и модуль 51 вычисления команд помощи при повороте реализуют модуль управления поведением транспортного средства, чтобы управлять поведением транспортного средства в соответствии с поведением транспортного средства, оцененным посредством модуля оценки поведения транспортного средства. Кроме того, в первом варианте осуществления модуль 49 вычисления команд коррекции продольной силы (в частности, режим запрещения увеличения продольной силы и режим управления для уменьшения продольной силы) управляет исполнительным механизмом управления поведением транспортного средства, чтобы увеличивать параметр характеристики сцепления, когда параметр характеристики сцепления становится ниже. Модуль 51 вычисления команд помощи при повороте (управление для добавления величины обратной связи на руле) управляет исполнительным механизмом управления поведением транспортного средства, чтобы увеличивать параметр характеристики сцепления, когда параметр характеристики сцепления становится ниже. В первом варианте осуществления модуль 51 вычисления команд помощи при повороте (управление для добавления величины обратной связи на руле) управляет исполнительным механизмом управления поведением транспортного средства, чтобы уменьшать угол скольжения колеса, когда параметр характеристики сцепления становится ниже. В первом варианте осуществления способ оценки состояния трения поверхности контакта земли и транспортного средства для оценки характеристики сцепления колеса транспортного средства на поверхности контакта с землей реализуется посредством способа, содержащего: этап первого ввода, чтобы задавать первый ввод, который является соотношением первой силы на колесе, действующей на колесо транспортного средства на поверхности контакта с землей в первом направлении, и первой степени скольжения колеса для колеса транспортного средства; этап второго ввода, чтобы задавать второй ввод, который является соотношением второй силы на колесе, действующей на колесо транспортного средства на поверхности контакта с землей во втором направлении, отличном от первого направления, и второй степени скольжения колеса для колеса транспортного средства; и этап вывода, чтобы определять, из вводов, заданных посредством этапов первого и второго ввода, вывод, который является параметром характеристики сцепления, указывающим характеристику сцепления колеса транспортного средства. Результаты первого варианта осуществления (1) Модуль первого ввода задает первый ввод, который является соотношением первой силы на колесе, действующей на колесо транспортного средства на поверхности контакта земли в первом направлении, и первой степени скольжения колеса для колеса транспортного средства. Модуль второго ввода, чтобы задавать второй ввод, который является соотношением второй силы на колесе, действующей на колесо транспортного средства на поверхности контакта земли во втором направлении, отличном от первого направления, и второй степени скольжения колеса для колеса транспортного средства. В соответствии с вводами, заданными посредством этапов первого и второго ввода, модуль вывода, чтобы определять вывод, который является параметром характеристики сцепления, указывающим характеристику сцепления колеса транспортного средства. Посредством компоновки характеристики шины (характеристики сцепления колеса транспортного средства) посредством использования соотношения силы на колесе и степени скольжения колеса, можно определять характеристику шины при одновременном подавлении влияния варьирования μ поверхности дороги. Кроме того, можно подавлять влияние варьирования μ поверхности дороги и получать характеристику шины без приема влияния варьирования μ поверхности дороги независимо от направления силы на колесе. Соответственно, если сила на колесе и степень скольжения колеса могут быть определены в первом направлении и втором направлении, система оценки согласно первому варианту осуществления может получать параметр характеристики сцепления, представляющий характеристику сцепления колеса, из соотношений силы на колесе и степени скольжения колеса. Из параметра характеристики сцепления, представляющего характеристику сцепления колеса, система может оценивать состояние сцепления надлежащим образом. Даже когда сила сцепления колеса находится в предельной области, система может оценивать состояние сцепления надлежащим образом и, следовательно, оценивать допустимый запас для предела по трению надлежащим образом. Кроме того, можно определять или получать параметр характеристики сцепления только из взаимосвязи между продольной силой и скоростью скольжения или только из взаимосвязи между поперечной силой и углом скольжения. Другими словами, можно определять параметр характеристики сцепления при условии, что сила действует только в одном направлении колеса, таком как продольное направление или поперечное направление. В этом случае, тем не менее, точность определения параметра характеристики сцепления может становиться ниже, когда транспортное средство сильно ускоряется в ходе поворота транспортного средства, или когда транспортное средство управляется в ходе торможения. В отличие от этого, система первого варианта осуществления может точно определять параметр характеристики сцепления даже в ситуации быстрого ускорения в ходе движения в повороте и т.п., посредством определения параметра характеристики сцепления из взаимосвязи силы на колесе и степени скольжения колеса в одном направлении и взаимосвязи силы на колесе и степени скольжения колеса в другом направлении. (2) Параметр характеристики сцепления является скоростью изменения силы на колесе относительно изменения степени скольжения колеса. Следовательно, система первого варианта осуществления может оценивать состояние сцепления и допустимый запас для предела по трению надлежащим образом на основе скорости изменения силы на колесе относительно величины изменения или варьирования степени скольжения колеса. (3) Модуль вывода может определять параметр характеристики сцепления только из соотношения первой силы на колесе и первой степени скольжения и соотношения второй силы на колесе и второй степени скольжения без использования коэффициента трения поверхности земли. Таким образом, при конструкции, которая не требует коэффициента трения поверхности земли, система первого варианта осуществления может реализовывать простую конструкцию без необходимости множества карт для различных значений коэффициента трения и оценивать состояние сцепления и допустимый запас для предела по трению надлежащим образом. (4) Модуль вывода может определять параметр характеристики сцепления из соотношения первой силы на колесе и первой степени скольжения колеса в нелинейной области, в которой первая сила на колесе варьируется нелинейно с первой степенью скольжения колеса, и соотношения второй силы на колесе и второй степени скольжения в нелинейной области, в которой вторая сила на колесе варьируется нелинейно со второй степенью скольжения колеса. Соотношение между силой на колесе, степенью скольжения колеса и параметром характеристики сцепления может быть перекомпоновано в форму заданной взаимосвязи между соотношением силы на колесе и степенью скольжения колеса и параметром характеристики сцепления в нелинейной области, в которой сила на колесе варьируется нелинейно в соответствии со степенью скольжения колеса. Модуль вывода выполнен с возможностью определять параметр характеристики сцепления посредством использования такой взаимосвязи. Следовательно, система может оценивать состояние сцепления и допустимый запас для предела по трению надлежащим образом. (5) Модуль вывода может определять параметр характеристики сцепления из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса согласно заданной нелинейной взаимосвязи между двумя входными переменными, представленными посредством двух вводов, и выходной переменной, представленной посредством вывода, и параметр характеристики сцепления является величиной, представляющей допустимый запас для предела по трению шины. Соотношение между силой на колесе, степенью скольжения колеса и параметром характеристики сцепления может быть перекомпоновано в форму заданной взаимосвязи, допускающей предоставление параметра характеристики сцепления (выходной переменной) из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса (из двух входных переменных). Параметр характеристики сцепления может быть сформулирован как величина, представляющая допустимый запас для предела по трению шины. Модуль вывода может определять параметр характеристики сцепления согласно такой взаимосвязи. Следовательно, система может оценивать состояние сцепления и допустимый запас для предела по трению надлежащим образом. (6) Заданная нелинейная взаимосвязь между двумя входными переменными и выходной переменной имеет форму одной из характерной искривленной поверхности и математической формулы. Если модуль вывода имеет такую упрощенную конструкцию, система может оценивать состояние сцепления и допустимый запас для предела по трению надлежащим образом. (7) Первая степень скольжения колеса является степенью скольжения колеса транспортного средства относительно поверхности земли в направлении первой силы на колесе, вторая степень скольжения колеса является степенью скольжения колеса транспортного средства относительно поверхности земли в направлении второй силы на колесе, параметр характеристики сцепления является переменной, представляющей возможность сцепления колеса транспортного средства, и модуль вывода выполнен с возможностью определять параметр характеристики сцепления только из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса без использования коэффициента трения поверхности земли. При конструкции, которая не требует коэффициента трения поверхности дороги, система первого варианта осуществления может достигать конструкции, которая не требует множества карт для различных значений коэффициента трения поверхности дороги и оценивает состояние сцепления и допустимый запас для предела по трению надлежащим образом. (8) Первая степень скольжения колеса является величиной, представляющей вектор относительной скорости колеса транспортного средства относительно поверхности земли в направлении первой силы на колесе, вторая степень скольжения колеса является величиной, представляющей вектор относительной скорости колеса транспортного средства относительно поверхности земли в направлении второй силы на колесе, и модуль вывода выполнен с возможностью определять параметр характеристики сцепления только из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса без использования коэффициента трения поверхности земли. При конструкции, которая не требует коэффициента трения поверхности земли, система реализует простую конструкцию, которая не требует множества карт для различных значений коэффициента трения, и система может оценивать состояние сцепления и допустимый запас для предела по трению надлежащим образом. (9) Первая сила на колесе является силой на шине в первом направлении, действующей на шину, соотношение первой силы на колесе к первой степени скольжения колеса является соотношением силы на шине в первом направлении к первой степени скольжения колеса, вторая сила на колесе является силой на шине во втором направлении, действующем на шину, соотношение второй силы на колесе ко второй степени скольжения колеса является соотношением силы на шине во втором направлении ко второй степени скольжения колеса, и параметр характеристики сцепления представляет градиент характеристической кривой шины равнодействующей силы на шине относительно результирующей степени скольжения колеса, при этом результирующая степень скольжения колеса является степенью скольжения колеса, сформированной в направлении комбинации первой силы на колесе и второй силы на колесе, и равнодействующая сила на шине является комбинированной силой на шине, являющейся результатом первой силы на колесе и второй силы на колесе. Модуль вывода выполнен с возможностью определять градиент характеристической кривой шины только из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса без использования коэффициента трения поверхности земли. При конструкции, которая не требует коэффициента трения поверхности земли, система реализует простую конструкцию, которая не требует множества карт для различных значений коэффициента трения, и система может оценивать состояние сцепления и допустимый запас для предела по трению надлежащим образом. (10) Характеристическая кривая шины включает в себя линейный сегмент, в котором равнодействующая сила на шине увеличивается линейно от нуля, когда абсолютное значение результирующей степени скольжения колеса увеличивается от нуля в области меньшего скольжения, в которой результирующая степень скольжения колеса меньше, и нелинейный сегмент, в котором равнодействующая сила на шине варьируется нелинейно, когда абсолютное значение результирующей степени скольжения колеса увеличивается в области большего скольжения, в которой абсолютное значение результирующей степени скольжения колеса увеличивается за пределы области меньшего скольжения. Параметр характеристики сцепления увеличивается от нуля до наибольшего значения параметра, когда, по меньшей мере, одно из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса увеличивается. Наибольшее значение параметра представляет градиент линейного сегмента характеристической кривой шины. Модуль вывода может определять градиент нелинейного сегмента характеристической кривой шины из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса. При этой конструкции, система может определять градиент нелинейного сегмента характеристической кривой шины как параметр характеристики шины в форме взаимосвязи результирующей степени скольжения колеса и равнодействующей силы на шине. (11) Характеристическая кривая шины включает в себя характеристическую кривую шины в случае высокого трения для поверхности дороги с более высоким трением, имеющей более высокий коэффициент трения, и характеристическую кривую шины в случае низкого трения для поверхности дороги с более низким трением, имеющей более низкий коэффициент трения, ниже более высокого коэффициента трения. Параметр характеристики сцепления представляет градиенты характеристики шины в случае высокого трения и характеристики шины в случае низкого трения. Модули ввода выполнены с возможностью определять текущее значение соотношения силы на колесе и степени скольжения колеса из текущего значения силы на шине и текущего значения степени скольжения колеса. Модуль вывода выполнен с возможностью определять текущее значение параметра характеристики сцепления из текущих значений соотношений силы на колесе и степени скольжения колеса и задавать значение градиента характеристической кривой шины в случае высокого трения, соответствующее текущему значению силы на шине и текущему значению степени скольжения колеса, и значение градиента характеристической кривой шины в случае низкого трения, соответствующее текущему значению силы на шине и текущему значению степени скольжения колеса, равными друг другу и равными текущему значению параметра характеристики сцепления. Таким образом, конструкция, не требующая коэффициента трения поверхности земли, достигается посредством системы с использованием характеристической кривой шины, которая включает в себя характеристическую кривую шины в случае высокого трения для поверхности дороги с более высоким трением, имеющей более высокий коэффициент трения, и характеристическую кривую шины в случае низкого трения для поверхности дороги с более низким трением, имеющей более низкий коэффициент трения, ниже более высокого коэффициента трения. При конструкции, которая не требует коэффициента трения поверхности земли, система реализует простую конструкцию, которая не требует множества карт для различных значений коэффициента трения, и система может оценивать состояние сцепления и допустимый запас для предела по трению надлежащим образом. (12) Характеристическая кривая шины является характеристической кривой, представляющей характеристику шины, зависящую от коэффициента трения поверхности дороги, и модуль вывода может определять градиент характеристической кривой шины только из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса без использования коэффициента трения поверхности дороги. При конструкции, которая не требует коэффициента трения поверхности земли, система реализует простую конструкцию, которая не требует множества карт для различных значений коэффициента трения, и система может оценивать состояние сцепления и допустимый запас для предела по трению надлежащим образом. (13) Параметр характеристики сцепления является функцией, которая увеличивается, когда, по меньшей мере, одно из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса увеличивается от заданного критического значения соотношения. Посредством использования параметра характеристики сцепления в форме функции система может оценивать состояние сцепления и допустимый запас для предела по трению надлежащим образом. (14) В области большего соотношения, превышающей заданное критическое значение соотношения, когда, по меньшей мере, одно из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса увеличивается, параметр характеристики сцепления увеличивается нелинейно так, что скорость увеличения параметра характеристики сцепления относительно увеличения этого соотношения силы на колесе и степени скольжения колеса увеличивается. Таким образом, посредством использования параметра характеристики сцепления в форме, имеющей заданную характеристику, система может оценивать состояние сцепления и допустимый запас для предела по трению надлежащим образом. (15) Параметр характеристики сцепления равен заданному критическому значению параметра, когда соотношение первой силы на колесе и первой степени скольжения и соотношение второй силы на колесе и второй степени скольжения колеса равны заданному критическому значению или значениям соотношения. Параметр характеристики сцепления уменьшается ниже критического значения параметра, когда, по меньшей мере, одно из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса уменьшается ниже критического значения соотношения. Параметр характеристики сцепления увеличивается выше критического значения параметра, когда соотношение первой силы на колесе и первой степени скольжения колеса и соотношение второй силы на колесе и второй степени скольжения колеса увеличиваются выше критического значения(й) соотношения. Таким образом, посредством использования параметра характеристики сцепления, проясняемого в форме, имеющей заданную характеристику, система может оценивать состояние сцепления и допустимый запас для предела по трению надлежащим образом. (16) Одна из первой силы на колесе и второй силы на колесе является продольной силой или движущей/тормозной силой, действующей на колесо транспортного средства. Обычно, просто получать информацию по продольной или движущей/тормозной силе, применяемой к колесу. Соответственно, система может легко оценивать состояние сцепления и допустимый запас для предела по трению. (17) Одна из первой силы на колесе и второй силы на колесе является продольной силой или движущей/тормозной силой, одна из первой степени скольжения колеса и второй степени скольжения колеса, соответствующей продольной или движущей/тормозной силе, является степенью продольного скольжения, и одно из первого ввода и второго ввода является величиной, полученной посредством деления продольной силы или движущей/тормозной силы на степень продольного скольжения. Следовательно, система может определять параметр характеристики сцепления из величины, полученной посредством деления продольной или движущей/тормозной силы на степень продольного скольжения. Таким образом, система может легко оценивать состояние сцепления и допустимый запас для предела по трению. (18) Степень продольного скольжения является скоростью скольжения колеса транспортного средства. В общем, просто получать информацию по скорости степени скольжения колеса. Соответственно, система может легко оценивать состояние сцепления и допустимый запас для предела по трению. (19) Одна из первой силы на колесе и второй силы на колесе является поперечной силой шины или силой шин, возникающей при повороте, действующей на колесо транспортного средства. В общем, просто получать информацию по поперечной силе или силе шины, возникающей при повороте. Соответственно, система может легко оценивать состояние сцепления и допустимый запас для предела по трению. (20) Одна из первой силы на колесе и второй силы на колесе является поперечной силой шины или силой, возникающей при повороте, одна из первой степени скольжения колеса и второй степени скольжения колеса, соответствующая поперечной силе шины или силе, возникающей при повороте, является степенью поперечного скольжения, и одно из первого ввода и второго ввода является величиной, полученной посредством деления поперечной силы или силы, возникающей при повороте, на степень поперечного скольжения. Следовательно, система может определять параметр характеристики сцепления из величины, полученной посредством деления поперечной силы или силы, возникающей при повороте, на степень поперечного скольжения, и тем самым легко оценивать состояние сцепления и допустимый запас для предела по трению. (21) Степень поперечного скольжения является углом скольжения колеса транспортного средства. Информация по углу скольжения колеса является информацией, которая может получаться, в общем, легко. Соответственно, система может легко оценивать состояние сцепления и допустимый запас для предела по трению. (22) Сила на колесе или каждая из сил на колесе являются равнодействующей силой из сил на колесе для левых и правых колес. Следовательно, посредством использования усредненных сил на колесе, система может оценивать состояние сцепления и допустимый запас для предела по трению надлежащим образом. (23) Первый и второй вводы являются безразмерными величинами, и модули ввода могут задавать безразмерный ввод посредством деления соотношения силы на колесе и степени скольжения колеса на эталонное соотношение. Следовательно, посредством использования обобщенного процесса, система может оценивать состояние сцепления и допустимый запас для предела по трению надлежащим образом. (24) Параметр характеристики сцепления является безразмерной величиной, и модуль вывода может определять безразмерную величину посредством деления на эталонный параметр. Таким образом, посредством использования обобщенного процесса с использованием обезразмеривания система может оценивать состояние сцепления и допустимый запас для предела по трению надлежащим образом. (25) Модуль вывода может определять вывод из двух вводов согласно заданной взаимосвязи между двумя вводами и выводом, и взаимосвязью между двумя вводами и выводом является взаимосвязь, которая может быть выражена посредством трехмерной искривленной поверхности в трехмерной системе координат, имеющей первую ось, представляющую первый ввод, который является соотношением первой силы на колесе и первой степени скольжения, вторую ось, представляющую второй ввод, который является соотношением второй силы на колесе и второй степени скольжения колеса, и третью ось, представляющую параметр характеристики сцепления. Таким образом, если модуль вывода имеет простую конструкцию, система может оценивать состояние сцепления и допустимый запас для предела по трению надлежащим образом. (26) Первая ось представляет одно из соотношения поперечной силы или силы, возникающей при повороте, и степени поперечного скольжения и соотношения продольной или движущей/тормозной силы и степени продольного скольжения, и вторая ось представляет другое из соотношения поперечной силы или силы, возникающей при повороте, и степени поперечного скольжения и соотношения продольной или движущей/тормозной силы и степени продольного скольжения. Таким образом, если модуль вывода имеет простую конструкцию, система может оценивать состояние сцепления и допустимый запас для предела по трению надлежащим образом. (27) Первая, вторая и третья оси представляют безразмерные величины, причем первая и вторая оси выполнены таким образом, что безразмерная величина определяется посредством деления соотношения силы на колесе и степени скольжения колеса в направлении каждой оси на эталонное соотношение, и третья ось выполнена таким образом, что безразмерная величина определяется посредством деления параметра характеристики сцепления на эталонный параметр. Таким образом, с помощью процесса, обобщенного посредством обезразмеривания, система может оценивать состояние сцепления и допустимый запас для предела по трению надлежащим образом. (28) Модули ввода содержат модуль считывания первой силы на колесе, чтобы считывать первую силу на колесе, модуль считывания первой степени скольжения колеса, чтобы считывать первую степень скольжения колеса, первый модуль деления, чтобы определять соотношение первой силы на колесе и первой степени скольжения колеса посредством деления первой силы на колесе, определенной посредством модуля считывания первой силы на колесе, на первую степень скольжения колеса, определенную посредством модуля считывания первой степени скольжения колеса, модуль считывания второй силы на колесе, чтобы считывать вторую силу на колесе, модуль считывания второй степени скольжения колеса, чтобы считывать вторую степень скольжения колеса, и второй модуль деления, чтобы определять соотношение второй силы на колесе и второй степени скольжения колеса посредством деления второй силы на колесе, определенной посредством модуля считывания второй силы на колесе, на вторую степень скольжения колеса, определенную посредством модуля считывания второй степени скольжения колеса. (29) Модуль считывания нагрузки на колесо определяет нагрузку на колесо для колеса транспортного средства, и модуль модификации модифицирует взаимосвязь между вводами и выводом в соответствии с нагрузкой на колесо, определенной посредством модуля считывания нагрузки на колесо. Следовательно, система может получать параметр характеристики сцепления точно без приема влияния от нагрузки на колесо. (30) Модуль модификации для корректирования варьирования нагрузки на колесо вычисляет коэффициент модификации в соответствии с нагрузкой на колесо. Модуль модификации выполняет модификацию каждого из первого и второго вводов посредством деления каждого ввода на коэффициент модификации и выполняет модификацию вывода посредством умножения вывода, определенного из модифицированного первого и второго ввода, на коэффициент модификации. Следовательно, система может определять параметр характеристики сцепления, который модифицируется адекватно в соответствии с нагрузкой на колесо. Система может получать параметр характеристики сцепления точно без приема влияния от нагрузки на колесо. (31) Коэффициент модификации увеличивается по мере того, как увеличивается нагрузка на колесо. Следовательно, система может определять параметр характеристики сцепления адекватно в соответствии с увеличением силы сцепления с увеличением нагрузки на колесо. (32) Скорость увеличения коэффициента модификации уменьшается по мере того, как увеличивается нагрузка на колесо. Следовательно, система может определять параметр характеристики сцепления адекватно в соответствии с силой сцепления, которая увеличивается так, что скорость увеличения становится ниже с увеличением нагрузки на колесо. (33) Модуль управления выполняет управление для восстановления сцепления, чтобы увеличивать параметр характеристики сцепления выше заданного критического значения параметра в критической области, в которой параметр характеристики сцепления меньше или равен критическому значению параметра, и управление для предотвращения снижения сцепления, чтобы предотвращать снижение параметра характеристики сцепления до критического значения параметра, когда параметр характеристики сцепления находится в критической области, в которой параметр характеристики сцепления превышает критическое значение параметра, но меньше заданного порогового значения параметра, которое превышает критическое значение параметра. Следовательно, при управлении для восстановления сцепления, система может обеспечивать силу сцепления посредством инструктирования водителю возвращать руль. При управлении для предотвращения снижения сцепления система может предотвращать уменьшение силы сцепления посредством недопущения слишком сильного поворота руля водителем. (34) Модуль управления может осуществлять управление состоянием сцепления, когда параметр характеристики сцепления превышает пороговое значение параметра. Управление состоянием сцепления является управлением, приспособленным к ситуации, когда обычное состояние сцепления обеспечивается. Следовательно, в соответствии с параметром характеристики сцепления, система может выполнять управление, приспособленное к обычному состоянию сцепления. (35) Модуль оценки стабильности может оценивать параметр стабильности транспортного средства, представляющий стабильность транспортного средства, из параметра характеристики сцепления. Следовательно, система может выполнять управление для стабилизации поведения транспортного средства в соответствии с параметром характеристики сцепления. (36) Модули ввода могут определять соотношение первой силы на колесе и первой степени скольжения колеса для первого колеса транспортного средства и соотношение второй силы на колесе и второй степени скольжения колеса для первого колеса транспортного средства и соотношение первой силы на колесе и первой степени скольжения для второго колеса транспортного средства и соотношение второй силы на колесе и второй степени скольжения колеса для второго колеса транспортного средства. Модуль вывода может определять параметр характеристики сцепления первого колеса из соотношения первой силы на колесе и первой степени скольжения колеса для первого колеса и соотношения второй силы на колесе и второй степени скольжения колеса для первого колеса и параметр характеристики сцепления второго колеса из соотношения первой силы на колесе и первой степени скольжения колеса для второго колеса и соотношения второй силы на колесе и второй степени скольжения колеса для второго колеса. Модуль оценки стабильности может оценивать параметр стабильности транспортного средства из параметра характеристики сцепления первого колеса и параметра характеристики сцепления второго колеса. Таким образом, система может оценивать параметр стабильности транспортного средства из параметров характеристик сцепления первых и вторых колес. Кроме того, система может оценивать параметр стабильности транспортного средства из разности параметра характеристики сцепления между первым и вторым колесами. (37) Первое колесо и второе колесо транспортного средства являются передним и задним колесами или левым и правым колесами транспортного средства. Следовательно, система может оценивать параметр стабильности транспортного средства из разности параметра характеристики сцепления между передним и задним колесами или между левыми и правыми колесами. (38) Модуль контроля стабильности может управлять транспортным средством в соответствии с параметром стабильности транспортного средства. Следовательно, система может выполнять управление для стабилизации поведения транспортного средства в соответствии с параметром характеристики сцепления. (39) Модуль оценки поведения транспортного средства может оценивать поведение транспортного средства в соответствии с параметром характеристики сцепления. (40) Устройство или система оценки состояния трения поверхности контакта земли и транспортного средства включает в себя модуль разложения, чтобы раскладывать параметр характеристики сцепления на поперечный компонент в поперечном направлении и продольный компонент в продольном направлении, и модуль оценки поведения транспортного средства включает в себя, по меньшей мере, один из модуля оценки продольного поведения, чтобы оценивать продольное поведение транспортного средства в продольном направлении в соответствии с продольным компонентом параметра характеристики сцепления, раскладываемого посредством модуля разложения, и модуля оценки поперечного поведения, чтобы оценивать поперечное поведение транспортного средства в поперечном направлении в соответствии с поперечным компонентом параметра характеристики сцепления, раскладываемого посредством модуля разложения. Следовательно, система может раскладывать параметр характеристики сцепления на продольный компонент и поперечный компонент. Также, система оценивает поведение транспортного средства в продольном направлении и поведение транспортного средства в поперечном направлении по отдельности в соответствии с продольным компонентом параметра характеристики сцепления и поперечным компонентом параметра характеристики сцепления. (41) Модуль оценки поперечного поведения оценивает поперечное поведение транспортного средства в поперечном направлении в соответствии с поперечным компонентом параметра характеристики сцепления первого колеса транспортного средства и поперечным компонентом параметра характеристики сцепления второго колеса транспортного средства. Таким образом, система может оценивать поперечное поведение транспортного средства надлежащим образом в соответствии с поперечными компонентами параметров характеристик сцепления первых и вторых колес. (42) Модуль управления поведением транспортного средства управляет поведением транспортного средства в соответствии с поведением транспортного средства, оцененным посредством модуля оценки поведения транспортного средства. Например, модуль управления поведением транспортного средства управляет, по меньшей мере, одним из продольного поведения и поперечного поведения транспортного средства в соответствии с результатом оценки, по меньшей мере, одного из модуля оценки продольного поведения и модуля оценки продольного поведения. Следовательно, система может выполнять управление для стабилизации поведения транспортного средства в соответствии с параметром характеристики сцепления. (43) Модуль управления поведением транспортного средства управляет поведением транспортного средства посредством управления исполнительным механизмом управления поведением транспортного средства (EPS-электродвигателем 7) в соответствии с поведением транспортного средства, оцененным посредством модуля оценки поведения транспортного средства. Следовательно, система может выполнять управление для стабилизации поведения транспортного средства в соответствии с параметром характеристики сцепления. (44) Исполнительный механизм управления поведением транспортного средства (EPS-электродвигатель 7) используется в качестве исполнительного механизма помощи в усилии на руле, чтобы помогать в усилии на руле для водителя транспортного средства, или исполнительного механизма управления углом поворота колес, чтобы управлять углом поворота колес транспортного средства. Следовательно, посредством помощи водителю в рулении или посредством управления углом поворота колес, система может выполнять управление для стабилизации поведения транспортного средства. (45) Модуль управления поведением транспортного средства может управлять исполнительным механизмом управления поведением транспортного средства (тормозным/приводным электродвигателем 21) таким образом, чтобы увеличивать параметр характеристики сцепления, когда параметр характеристики сцепления уменьшается. Следовательно, система может восстанавливать силу сцепления посредством увеличения параметра характеристики сцепления. Таким образом, система может выполнять управление для стабилизации поведения транспортного средства посредством увеличения параметра характеристики сцепления. (46) Модуль управления поведением транспортного средства может управлять исполнительным механизмом управления поведением транспортного средства таким образом, чтобы уменьшать угол скольжения колеса транспортного средства, когда параметр характеристики сцепления уменьшается. Следовательно, система может восстанавливать силу сцепления посредством уменьшения угла скольжения шин. Система может выполнять управление для стабилизации поведения транспортного средства посредством уменьшения угла скольжения шин. (47) Модуль оценки поведения транспортного средства может оценивать характеристику поворачиваемости транспортного средства из параметра характеристики сцепления, и модуль управления поведением транспортного средства может управлять поведением при повороте транспортного средства в соответствии с характеристикой поворачиваемости транспортного средства, оцененной посредством модуля оценки поведения транспортного средства. Следовательно, система может оценивать характеристику поворачиваемости транспортного средства посредством использования параметра характеристики сцепления и выполняет управление, чтобы стабилизировать поведение транспортного средства посредством использования оцененной характеристики поворачиваемости. (48) Модуль оценки поведения транспортного средства может оценивать, по меньшей мере, одну из тенденции сноса транспортного средства и тенденции заноса транспортного средства из параметра характеристики сцепления, и модуль управления поведением транспортного средства может управлять поведением при повороте транспортного средства таким образом, чтобы уменьшать тенденцию, которая является, по меньшей мере, одной из тенденции сноса транспортного средства и тенденции заноса транспортного средства, оцененной посредством модуля оценки поведения транспортного средства. Следовательно, система может управлять транспортным средством для стабилизации поведения при повороте транспортного средства посредством уменьшения тенденции сноса транспортного средства или тенденции заноса транспортного средства в соответствии с параметром характеристики сцепления. (49) Модуль управления крутящим моментом колеса (ECU тормозного/приводного электродвигателя 22 и модуль 49 вычисления команд коррекции продольной силы) управляет крутящим моментом колеса, который является одним из тормозного крутящего момента и приводящего в движение крутящего момента колеса, в соответствии с параметром характеристики сцепления. Следовательно, система может управлять характеристикой сцепления колеса посредством управления, по меньшей мере, одним из тормозного крутящего момента и приводящего в движение крутящего момента колеса и тем самым достигать требуемой характеристики сцепления колеса. (50) Модуль управления крутящим моментом колеса может управлять, по меньшей мере, одним из тормозного крутящего момента и приводящего в движение крутящего момента колеса в соответствии с продольным компонентом параметра характеристики сцепления. Посредством использования продольного компонента параметра характеристики сцепления система может управлять тормозным крутящим моментом и приводящим в движение крутящим моментом колеса надлежащим образом. (51) Модуль управления крутящим моментом колеса управляет исполнительным механизмом управления крутящим моментом колеса (тормозным/приводным электродвигателем 21), чтобы управлять крутящим моментом колеса. Следовательно, посредством управления исполнительным механизмом управления крутящим моментом колеса, система может управлять тормозным крутящим моментом или приводящим в движение крутящим моментом колеса надлежащим образом. (52) Модуль управления крутящим моментом колеса может управлять, по меньшей мере, одним из тормозного крутящего момента и приводящего в движение крутящего момента колеса таким образом, чтобы уменьшать крутящий момент колеса до тех пор, пока параметр характеристики сцепления не становится выше заданного критического значения параметра (заданного порогового значения Kx2), когда параметр характеристики сцепления становится ниже заданного критического значения параметра. Следовательно, система может восстанавливать силу сцепления посредством управления тормозной силой или движущей силой колеса и задания характеристики сцепления колеса в требуемой форме. (53) Модуль управления крутящим моментом колеса управляет, по меньшей мере, одним из тормозного крутящего момента и приводящего в движение крутящего момента колеса таким образом, чтобы ограничивать увеличение крутящего момента колеса, когда параметр характеристики сцепления находится в области, превышающей заданное критическое значение параметра (заданное пороговое значение Kx2) и меньшей заданного порогового значения (заданного порогового значения Kx1). Следовательно, система может предотвращать уменьшение силы сцепления посредством управления тормозным крутящим моментом и приводящим в движение крутящим моментом колеса и достижения требуемой формы характеристики сцепления колеса. (54) Модуль управления крутящим моментом колеса управляет, по меньшей мере, одним из тормозного крутящего момента и приводящего в движение крутящего момента колеса таким образом, чтобы увеличивать крутящий момент колеса до тех пор, пока параметр характеристики сцепления не становится меньшим заданного порогового значения, при приеме запроса водителя транспортного средства, чтобы увеличивать продольную силу, когда параметр характеристики сцепления превышает заданное критическое значение параметра. Следовательно, система может формировать продольную силу в соответствии с намерением водителя при одновременном предотвращении снижения силы сцепления посредством управления тормозным крутящим моментом и приводящим в движение крутящим моментом колеса. (55) Заданное критическое значение параметра равно нулю. Следовательно, система может управлять тормозным крутящим моментом и приводящим в движение крутящим моментом колеса в соответствии с силой сцепления, которая становится насыщенной около точки, в которой характеристика сцепления равна нулю. Второй вариант осуществления изобретения Конструкция Фиг.46 схематично показывает общую конструкцию транспортного средства согласно второму варианту осуществления. Фиг.47 показывает внутреннюю структуру устройства 8 оценки состояния движения транспортного средства, предусмотренного в транспортном средстве. Как показано на фиг.46 и 47, базовая конструкция транспортного средства второго варианта осуществления является во многом идентичной конструкции транспортного средства первого варианта осуществления, показанного на фиг.30 и 31. Тем не менее, во втором варианте осуществления, колеса 11FL-11RR содержат, соответственно, ступичные датчики 71FL-71RR. С другой стороны, система второго варианта осуществления не включает в себя EPSECU 6 для EPS, EPS-электродвигатель 7 и модуль 50 вычисления характеристик поворачиваемости. В нижеследующем пояснении части в транспортном средстве согласно второму варианту осуществления с присвоенными идентичными ссылочными позициями являются идентичными частям с идентичными ссылочными позициями в транспортном средстве первого варианта осуществления, если иное не указано конкретно. Во втором варианте осуществления система может управлять продольными силами колес 11FL-11RR по отдельности, как пояснено ниже. Следовательно, в этой точке, процессы составных частей отличаются от процессов в первом варианте осуществления. Модуль 42 оценки скорости скольжения вычисляет скорости λfl, λfr, λrl, λrr скольжения колес 11FL-11RR в соответствии со скоростями вращения колес для колес 11FL-11RR, считываемыми посредством датчика 5 скорости вращения колес, и скоростью кузова транспортного средства, вычисляемой посредством модуля 41 вычисления скорости кузова транспортного средства. Затем, модуль 42 оценки скорости скольжения выводит результаты вычисления в модуль 46 вычисления Fx/λ. Модуль 43 оценки продольной силы вычисляет продольные силы Fxfl, Fxfr, Fxrl и Fxrr колес 11FL-11RR в соответствии с частотами вращения и значениями тока приводных/тормозных электродвигателей 21FL-21RR. В первом варианте осуществления модуль 43 оценки продольной силы определяет сумму приводящих в движение/тормозных крутящих моментов TTir левых и правых колес, чтобы получать каждую из продольной силы Fxf передних колес и продольной силы Fxr задних колес. Во втором варианте осуществления, в отличие от этого, модуль 43 оценки продольной силы определяет приводящие в движение/тормозные крутящие моменты TTir приводных/тормозных электродвигателей 21FL-21RR колес 11FL-11RR без добавления приводящих в движение/тормозных крутящих моментов TTir левых и правых колес. Модуль 43 оценки продольной силы вычисляет продольную силу Fxfl, Fxfr, Fxrl и Fxrr колес 11FL-11RR, посредством умножения каждого из приводящих в движение/тормозных крутящих моментов TTir колес 11FL-11RR на динамический радиус. Модуль 43 оценки продольной силы выводит результаты вычисления (результаты оценки) в модуль 46 вычисления Fx/λ. Ступичные датчики 71FL-71RR, показанные на фиг.46, считывают поперечные силы, действующие на колеса 11FL-11RR, соответственно. Ступичные датчики 71FL-71RR выводят свои результаты считывания в устройство 8 оценки состояния движения транспортного средства (модуль 45 оценки поперечной силы). В устройстве 8 оценки состояния движения транспортного средства, модуль 45 оценки поперечной силы вычисляет поперечные силы Fyfl, Fyfr, Fyrl и Fyrr колес 11FL-11RR в соответствии с результатами считывания ступичных датчиков 71FL-71RR. Модуль 45 оценки поперечной силы выводит результаты вычисления в модуль 47 вычисления Fy/βt. Модуль 44 оценки угла скольжения шин, показанный на фиг.47, оценивает угол β скольжения кузова транспортного средства (угол бокового скольжения транспортного средства) таким же образом, как в первом варианте осуществления, и преобразуют оцененный угол β скольжения кузова транспортного средства в угол скольжения передних колес (угол скольжения шин) и угол скольжения задних колес (угол скольжения шин). Фиг.48 показывает один пример конструкции модуля 44 оценки угла скольжения шин для оценки угла бокового скольжения транспортного средства (угла скольжения). Конструкция, показанная в примере по фиг.48, не содержит модуль 63 компенсации для оценки β и усиление K2 компенсации. Кроме того, модуль 44 оценки угла скольжения шин задает угол βtf скольжения передних колес как углы βtfl и βtfr скольжения переднего левого колеса и переднего правого колеса и задает угол βtr скольжения задних колес как углы βtrl и βtrr скольжения заднего левого колеса и заднего правого колеса. Модуль 44 оценки угла скольжения шин выводит полученные таким образом углы βtfl-βtrr скольжения колес 11FL-11RR в модуль 47 вычисления Fy/βt. Модуль 46 вычисления Fx/λ вычисляет соотношения (Fxfl/λfl-Fxrr/λrr) продольных сил Fxfl-Fxrr и скоростей λfl-λrr скольжения в соответствии со скоростями λfl-λrr скольжения и продольными силами Fxfl-Fxrr колес 11FL-11RR, вычисляемыми посредством модуля 42 оценки скорости скольжения и модуля 43 оценки продольной силы. Модуль 46 вычисления Fx/λ выводит результаты вычисления в модуль 48 вычисления состояния сцепления шины. Модуль 47 вычисления Fy/βt вычисляет соотношения (Fyfl/βtfl-Fyrr/βtrr) поперечных сил Fyfl-Fyrr и углов βtfl-βtrr скольжения в соответствии с углами βtfl-βtrr скольжения и поперечными силами Fyfl-Fyrr, вычисляемыми посредством модуля 44 оценки угла скольжения шин и модуля 45 оценки поперечной силы. Модуль 47 вычисления Fy/βt выводит результаты вычисления в модуль 48 вычисления состояния сцепления шины. Модуль 48 вычисления состояния сцепления шины (модуль вычисления μ-градиента) оценивает состояние сцепления каждого из колес 11FL-11RR в соответствии с соотношениями (Fxfl/λfl-FxrR/λrr) продольных сил Fxfl-Fxrr и скоростей λfl-λrr скольжения передних и задних колес, вычисляемыми посредством модуля Fx/λ вычисления 46, и соотношениями (Fyfl/βtfl-Fyrr/βtrr) поперечных сил Fyfl-Fyrr и углов βtfl-βtrr скольжения, вычисляемыми посредством модуля 47 вычисления Fy/βt. Таким образом, модуль 48 вычисления состояния сцепления шины оценивает μ-градиент каждого из колес 11FL-11RR. С этой целью, модуль 48 вычисления состояния сцепления шины имеет трехмерные характеристические карты μ-градиента, как показано на фиг.29. Модуль 48 вычисления состояния сцепления шины имеет такую трехмерную характеристическую карту μ-градиента для каждого из колес 11FL-11RR. Например, модуль 48 вычисления состояния сцепления шины размещает трехмерные характеристические карты μ-градиента сохраненными в носителе хранения данных, таком как запоминающее устройство. Соответственно, модуль 48 вычисления состояния сцепления шины вычисляет (выводит) μ-градиент (γ/γ0) каждого из колес 11FL-11RR посредством обращения к трехмерной характеристической карте μ-градиента соответствующего одного из колес 11FL-11RR и использования, в качестве вводов, соотношения (Fxfl/λfl-FxrR/λrr) продольной силы Fxfl-Fxrr и скорости λfl-λrr скольжения соответствующего одного из колеса 11FL-11RR и соотношение (Fyfl/βtfl-Fyrr/βtrr) поперечной силы Fyfl-Fyrr и угла βtfl-βtrr скольжения соответствующего одного из колес 11FL-11RR (см. фиг.37). Модуль 49 вычисления команд коррекции продольной силы выполняет процесс управления для предотвращения пробуксовки и блокировки колес 11FL-11RR в соответствии с μ-градиентами колес 11FL-11RR. Фиг.49 показывает один пример процесса управления. Как показано на фиг.49, сначала на этапе S51, модуль 49 вычисления команд коррекции продольной силы определяет то, превышает μ-градиент заданное пороговое значение A1 или нет. Заданное пороговое значение A1 является экспериментальным значением, эмпирическим значением или теоретическим значением. Заданное пороговое значение A1 является, например, произвольным положительным значением. μ-градиент является величиной, полученной посредством обезразмеривания в форме γ/γ0. Соответственно, заданное пороговое значение A1 является значением, определенным с учетом обезразмеривания. Когда μ-градиент превышает заданное пороговое значение A1 (μ-градиент>A1), модуль 49 вычисления команд коррекции продольной силы переходит к этапу S52. Когда μ-градиент меньше или равен заданному пороговому значению A1 (μ-градиент≤A1), то модуль 49 вычисления команд коррекции продольной силы переходит к этапу S53. На этапе S52, модуль 49 команды коррекции продольной силы определяет то, что колесо находится в состоянии сцепления (состоянии более высокого сцепления) и выполняет обычное управление продольной силой (обычный режим управления). Соответственно, команда коррекции управления продольной силы не выводится в ECU 22 приводного/тормозного электродвигателя посредством модуля 49 команды коррекции продольной силы. Альтернативно, модуль 49 вычисления команд коррекции продольной силы выводит команду коррекции управления, позволяющую ECU 22 приводного/тормозного электродвигателя выполнять обычное управление продольной силой. Затем, модуль 49 вычисления команд коррекции продольной силы завершает процесс, показанный на фиг.49. На этапе S53, модуль 49 вычисления команд коррекции продольной силы определяет то, превышает μ-градиент заданное пороговое значение A2 или нет. Заданное пороговое значение A2 является экспериментальным значением, эмпирическим значением или теоретическим значением. Заданное пороговое значение A2 меньше заданного порогового значения A1 (A2 Когда μ-градиент превышает заданное пороговое значение A2 (μ-градиент>A2), модуль 49 вычисления команд коррекции продольной силы переходит к этапу S54. Когда μ-градиент меньше или равен заданному пороговому значению A2 (μ-градиент≤A2), модуль 49 вычисления команд коррекции продольной силы переходит к этапу S55. На этапе S54, модуль 49 команды коррекции продольной силы определяет то, что сила сцепления еще не достигла точки насыщения, и выполняет управление продольной силой (режим управления для запрещения увеличения продольной силы) для ограничения дополнительного увеличения продольной силы от текущего уровня. Соответственно, в качестве управления для предотвращения пробуксовки и блокировки, модуль 49 вычисления команд коррекции продольной силы выводит команду коррекции управления, чтобы ограничивать увеличение продольной силы на основе операции ускорения или операции торможения, в ECU 22 приводного/тормозного электродвигателя. Например, модуль 49 вычисления команд коррекции продольной силы выводит команду коррекции управления, которая задается равной значению для вычитания величины увеличения продольной силы вследствие операции ускорения или операции торможения. Затем, модуль 49 вычисления команд коррекции продольной силы завершает процесс, показанный на фиг.49. На этапе S55, модуль 49 вычисления команд коррекции продольной силы определяет то, что состояние находится в области, в которой сила сцепления насыщается, и выполняет управление продольной силой (режим управления для уменьшения продольной силы), чтобы восстанавливать силу сцепления посредством расходования продольной силы. Соответственно, в качестве управления для предотвращения пробуксовки и блокировки, модуль 49 вычисления команд коррекции продольной силы выводит, в ECU 22 приводного/тормозного электродвигателя, команду коррекции управления, чтобы уменьшать продольную силу. Например, даже в случае операции ускорения или операции торможения, модуль 49 вычисления команд коррекции продольной силы выводит команду коррекции управления, чтобы уменьшать продольную силу при одновременном подавлении увеличения продольной силы вследствие этой операции. Затем, модуль 49 вычисления команд коррекции продольной силы завершает процесс по фиг.49. Таким образом, модуль 49 вычисления команд коррекции продольной силы выполняет процесс на основе μ-градиента. Модуль 49 вычисления команд коррекции продольной силы выполняет этот процесс в соответствии с μ-градиентом каждого из колес 11FL-11RR. В случае вышеуказанного управления для предотвращения пробуксовки и блокировки колес для управления колесами 11FL-11RR по отдельности (см. фиг.49), продольная сила каждого из колес 11FL-11RR регулируется независимо от других. Следовательно, возникает разность в приводящем в движение тормозном крутящем моменте между колесами 11FL-11RR (например, между левыми и правыми колесами). Вследствие этой разности приводящих в движение/тормозных крутящих моментов, вызываемой посредством управления для предотвращения пробуксовки и блокировки колес, транспортное средство может поворачиваться. Кроме того, независимо от управления для предотвращения пробуксовки и блокировки колес, транспортное средство может становиться неспособным поворачиваться надлежащим образом в соответствии с операцией руления вследствие возникновения бокового скольжения шины. Соответственно, модуль 49 вычисления команд коррекции продольной силы и модуль 51 вычисления команд помощи при повороте выполняют процесс, удовлетворяющий такому поведению транспортного средства. Фиг.50 показывает один пример процесса. Сначала, на этапе S61, модуль 49 вычисления команд коррекции продольной силы вычисляет вращающий момент (момент поворота вокруг вертикальной оси) ΔM, сформированный посредством разности приводящих в движение/тормозных крутящих моментов левого и правого колеса вследствие управления для предотвращения пробуксовки и блокировки колес. Затем, на этапе S62, модуль 51 вычисления команд помощи при повороте вычисляет базовую скорость поворота вокруг вертикальной оси, спрогнозированную в случае линейной характеристики транспортного средства. В частности, модуль 51 вычисления команд помощи при повороте вычисляет базовую скорость γb поворота вокруг вертикальной оси посредством ввода скорости транспортного средства и угла поворота колес в линейную двухколесную модель транспортного средства (используемую при вычислении угла βt скольжения). На следующем этапе S63, модуль 51 вычисления команд помощи при повороте вычисляет разность Δγ (=γ-γb) между фактической скоростью поворота вокруг вертикальной оси (считываемой скоростью поворота вокруг вертикальной оси) γ, сформированной фактически в транспортном средстве, и базовой скоростью γb поворота вокруг вертикальной оси, вычисляемой на этапе S62. Затем, на этапе S64, модуль 49 вычисления команд коррекции продольной силы вычисляет крутящий момент MMTR помощи при повороте согласно следующему математическому выражению (9) посредством использования вращающего момента ΔM, вычисляемого на S61, и разности Δγ скоростей поворота вокруг вертикальной оси, вычисляемой на S63. MMTR=ΔM+G×Δγ
В этом уравнении G является усилением помощи при повороте, которое является константой, определенной предварительно посредством настройки. Затем, модуль 49 вычисления команд коррекции продольной силы выводит команду для управления при повороте в ECU 22 приводного/тормозного электродвигателя. Таким образом, модуль 49 вычисления команд коррекции продольной силы доставляет, в ECU 22 приводного/тормозного электродвигателя, команду для формирования разности левой и правой продольной силы, чтобы достигать крутящего момента MMTR помощи при повороте, вычисляемого согласно математическому выражению (9). Команда для формирования разности левой и правой продольной силы (команда, чтобы достигать MMTR) является командой, чтобы формировать продольную силу для колеса или колес, имеющих более высокий μ-градиент. В случае ограничения поворачиваемости эта команда для формирования разности левой и правой движущей силы является командой для увеличения тормозной силы колеса снаружи поворота или командой для увеличения движущей силы колеса внутри поворота. В случае содействия поворачиваемости эта команда для формирования разности левой и правой движущей силы является командой для увеличения движущей силы колеса снаружи поворота или командой для увеличения тормозной силы колеса внутри поворота. При возникновении нестабильного поведения транспортного средства управление при повороте выполняется только посредством увеличения тормозной силы без увеличения движущей силы, поскольку замедление действует в направлении, стабилизирующем поведение транспортного средства. Кроме того, если, даже в таком случае водитель выполняет операцию резкого ускорения, то приоритет отдается операции водителя, и управление при повороте выполняется посредством увеличения движущей силы. Действия и операции Фиг.51 показывает один пример процесса в устройстве 8 оценки состояния движения транспортного средства. Устройство 8 оценки состояния движения транспортного средства выполняет этот процесс в ходе движения или перемещения транспортного средства. Сначала, в устройстве 8 оценки состояния движения транспортного средства, модуль 41 вычисления скорости кузова транспортного средства вычисляет скорость кузова транспортного средства (этап S71). В устройстве 8 оценки состояния движения транспортного средства, модуль 42 оценки скорости скольжения вычисляет скорости λfl-λrr скольжения колес 11FL-11RR в соответствии со скоростью кузова транспортного средства (этап S72). Кроме того, модуль 44 оценки угла скольжения шин в устройстве 8 оценки состояния движения транспортного средства вычисляет углы βtfl-βtrr скольжения колес 11FL-11RR (этап S73). В устройстве 8 оценки состояния движения транспортного средства, модуль 43 оценки продольной силы вычисляет продольные силы Fxfl-Fxrr колес 11FL-11RR (этап S74). Кроме того, модуль 45 оценки поперечной силы в устройстве 8 оценки состояния движения транспортного средства вычисляет поперечные силы Fyfl-Fyrr колес 11FL-11RR (этап S75). В устройстве 8 оценки состояния движения транспортного средства, модуль 46 вычисления Fx/λ вычисляет соотношения (Fxfl/λfl-Fxrr/λrr) продольной силы Fxfl-Fxrr к скорости λfl-λrr скольжения колес 11FL-11RR (этап S76). Кроме того, модуль 47 вычисления Fy/βt в устройстве 8 оценки состояния движения кузова транспортного средства вычисляет соотношения (Fyfl/βtfl-Fyrr/βtrr) поперечной силы Fyfl-Fyrr к углу βtfl-βtrr скольжения (этап S77). Затем, модуль 48 вычисления состояния сцепления шины в устройстве 8 оценки состояния движения транспортного средства оценивает μ-градиент (параметр характеристики сцепления) на основе трехмерной характеристической карты μ-градиента (этап S78). Таким образом, модуль 48 вычисления состояния сцепления шины вычисляет μ-градиент (γ/γ0) для каждого из колес в ходе движения, соответствующий соотношению (Fxfl/λfl-Fxrr/λrr) продольной силы Fxfl-Fxrr к скорости λfl-λrr скольжения и соотношению (Fyfl/βtfl-Fyrr/βtrr) поперечной силы Fyfl-Fyrr к углу βtfl-βtrr скольжения, посредством использования трехмерной характеристической карты μ-градиента для этого одного из колес. Затем, модуль 49 вычисления команд коррекции продольной силы устройства 8 оценки состояния движения транспортного средства выполняет управление продольной силой для предотвращения пробуксовки и блокировки каждого из колес 11FL-11RR (этап S78). Кроме того, модуль 49 вычисления команд коррекции продольной силы и модуль 51 вычисления команд помощи при повороте устройства 8 оценки состояния движения транспортного средства выполняют управление при повороте посредством управления продольными силами (этап S79). Таким образом, устройство 8 оценки состояния движения транспортного средства выполняет управление для предотвращения пробуксовки и блокировки и управление при повороте посредством управления продольными силами следующим образом в соответствии с μ-градиентом (параметром характеристики сцепления). Таким образом, когда μ-градиент превышает заданное пороговое значение A1 (μ-градиент>A1), устройство 8 оценки состояния движения транспортного средства определяет то, что колесо, удовлетворяющее этому состоянию, находится в состоянии сцепления, и выполняет обычное управление продольной силой (обычный режим управления) (S51→S52). Кроме того, когда μ-градиент меньше или равен заданному пороговому значению A1 и превышает заданное пороговое значение A2 (градиент A1≥μ>A2), то устройство 8 оценки состояния движения транспортного средства выполняет управление продольной силой, чтобы запрещать увеличение продольной силы для колеса, удовлетворяющего этому состоянию (управление для предотвращения пробуксовки и блокировки, режим управления для запрещения увеличения продольной силы) (S51→S53→S54). Соответственно, система может не допускать насыщения силы сцепления посредством увеличения продольной силы, вызываемой посредством операции ускорения или операции торможения от водителя. Кроме того, когда μ-градиент меньше или равен заданному пороговому значению A2 (A2≥μ-градиент), устройство 8 оценки состояния движения транспортного средства выполняет управление продольной силой, чтобы уменьшать продольную силу (управление для предотвращения пробуксовки и блокировки, режим управления для уменьшения продольной силы) для колеса, удовлетворяющего этому состоянию (S51→S53→S55). При этом управлении, даже если сила сцепления насыщается, система может восстанавливать силу сцепления. В вышеуказанном процессе система определяет состояние сцепления колеса только посредством сравнения μ-градиента с заданными пороговыми значениями A1 и A2. Посредством этого, система оценивает допустимый запас для предела по трению адекватно и выполняет управление продольной силой, подходящее для оцененного допустимого запаса, даже когда сила сцепления колеса находится в состоянии предела. Устройство 8 оценки состояния движения транспортного средства вычисляет вращающий момент ΔM, сформированный посредством разности продольной силы между левыми и правыми колесами вследствие управления для предотвращения пробуксовки и блокировки (S61). Кроме того, устройство 8 оценки состояния движения транспортного средства вычисляет базовую скорость γb поворота вокруг вертикальной оси и вычисляет разность Δγ посредством использования вычисленной базовой скорости γb поворота вокруг вертикальной оси (этап S62 и этап S63). Затем, устройство 8 оценки состояния движения транспортного средства вычисляет крутящий момент MMTR помощи при повороте из вычисленного вращающего момента ΔM и разности Δγ скоростей поворота вокруг вертикальной оси. В соответствии с вычисленным крутящим моментом MMTR помощи при повороте, устройство 8 оценки состояния движения транспортного средства выполняет управление при повороте транспортного средства посредством формирования продольной силы для колеса, имеющего более высокий μ-градиент (этап S64). При этом управлении, система не допускает поворота транспортного средства посредством управления для предотвращения пробуксовки и блокировки. Кроме того, система достигает поворачиваемости согласно операции рулевого управления даже в случае бокового скольжения шины. Во втором варианте осуществления модуль 49 вычисления команд коррекции продольной силы и модуль 51 вычисления команд помощи при повороте реализуют модуль оценки поведения транспортного средства для оценки поведения транспортного средства в соответствии с параметром характеристики сцепления. Результаты второго варианта осуществления изобретения (1) Модуль оценки поведения транспортного средства оценивает поведение транспортного средства, и модуль управления поведением транспортного средства управляет поведением транспортного средства посредством управления исполнительным механизмом управления поведением транспортного средства (тормозным/приводным электродвигателем 21) в соответствии с поведением транспортного средства, оцененным посредством модуля оценки поведения транспортного средства. Следовательно, система может выполнять управление для стабилизации поведения транспортного средства (включающего в себя поведение при повороте транспортного средства) в соответствии с параметром характеристики сцепления. (2) Исполнительный механизм управления поведением транспортного средства (тормозной/приводной электродвигатель 21) имеет форму исполнительного механизма управления продольной силой для управления продольными силами левых и правых колес транспортного средства. Следовательно, система может выполнять управление для стабилизации поведения транспортного средства (включающего в себя поведение при повороте транспортного средства) посредством управления продольными силами левых и правых колес. (3) Система выполняет управление при повороте транспортного средства на основе вращающего момента ΔM, сформированного посредством разности приводящих в движение/тормозных крутящих моментов между левыми и правыми колесами вследствие управления продольной силой (управление для предотвращения пробуксовки и блокировки). Следовательно, система может не допускать поворот транспортного средства за счет управления продольной силой (управления для предотвращения пробуксовки и блокировки). Согласно одной из возможных интерпретаций проиллюстрированных вариантов осуществления, можно подготавливать следующую формулу изобретения. X1) Система (устройство или способ) для оценки характеристики сцепления колеса транспортного средства на поверхности контакта земли, содержащая: элемент первого ввода (модуль первого ввода или этап первого ввода), чтобы задавать первый ввод, который является соотношением силы на колесе в первом направлении, действующей на колесо транспортного средства на поверхности контакта земли в первом направлении, и степени скольжения колеса в первом направлении колеса транспортного средства; элемент второго ввода (модуль второго ввода или этап второго ввода), чтобы задавать второй ввод, который является соотношением силы на колесе во втором направлении, действующей на колесо транспортного средства на поверхности контакта земли во втором направлении, отличном от первого направления, и степени скольжения колеса во втором направлении колеса транспортного средства; и элемент вывода (модуль вывода или этап вывода), чтобы определять, из первого ввода, заданного посредством элемента первого ввода, и второго ввода, заданного посредством элемента второго ввода, вывод, который является параметром характеристики сцепления, указывающим характеристику сцепления колеса транспортного средства. X2) Система (устройство или способ) по пункту X1, в которой первое направление является продольным направлением колеса, второе направление является поперечным направлением колеса, элемент первого ввода выполнен с возможностью определять, в качестве первого ввода, соотношение продольной силы на колесе и степени продольного скольжения колеса для колеса, и элемент второго ввода выполнен с возможностью определять, в качестве второго ввода, соотношение поперечной силы на колесе и степени поперечного скольжения колеса для колеса. X3) Система (устройство или способ) по пункту X1 или X2, в которой элемент вывода выполнен с возможностью иметь заданную характеристическую взаимосвязь "два-входа-один-выход" (такую как взаимосвязь, показанная на фиг.37) и определять параметр характеристики сцепления из соотношения силы на колесе в первом направлении и степени скольжения колеса в первом направлении и соотношения силы на колесе во втором направлении и степени скольжения колеса во втором направлении согласно этой характеристической взаимосвязи. X4) Система (устройство или способ) по любому из п.п.X1-X3, в которой параметр характеристики сцепления является величиной, представляющей градиент характеристической кривой между силой на колесе в результирующем направлении и степенью скольжения колеса в результирующем направлении или комбинированном направлении в интервале между первым направлением и вторым направлением. X5) Система (устройство или способ) по пункту X3 или X4, в которой параметр характеристики сцепления, определенный посредством вышеуказанной характеристической взаимосвязи, увеличивается от минимального значения параметра до положительного максимального значения параметра, когда, по меньшей мере, один из первого и второго вводов возрастает. X6) Система (устройство или способ) по пункту X5, при этом система дополнительно содержит элемент (модуль или этап) считывания нагрузки на колесо, чтобы определять нагрузку на колесо для колеса, и элемент модификации (модуль модификации или этап модификации), и элемент модификации выполнен с возможностью модифицировать характеристическую взаимосвязь таким образом, чтобы увеличивать максимальное значение параметра по мере того, как нагрузка на колесо увеличивается. X7) Система (устройство или способ) по любому из п.п.X1-X6, в которой элемент первого ввода задает первый ввод для передних двух колес транспортного средства и первый ввод для задних двух колес транспортного средства, элемент второго ввода задает второй ввод для передних двух колес транспортного средства и второй ввод для задних двух колес транспортного средства, и элемент вывода определяет параметр характеристики сцепления для передних двух колес из первого и второго вводов для передних двух колес согласно взаимосвязи характеристики сцепления для передних двух колес и определяет параметр характеристики сцепления для задних двух колес из первого и второго вводов для задних двух колес согласно взаимосвязи характеристики сцепления для задних двух колес. X8) Система (устройство или способ) по любому из п.п.X1-X6, в которой транспортное средство является транспортным средством, имеющим множество колес (например, 4, 3 или 2 колеса), элемент первого ввода задает первый ввод для каждого из колес, элемент второго ввода задает второй ввод для каждого из колес, и элемент вывода определяет параметр характеристики сцепления для каждого из колес из первого и второго вводов для каждого колеса согласно взаимосвязи характеристики сцепления для каждого колеса. X9) Система (устройство или способ) по любому из п.п.X1-X6, в которой указанное колесо транспортного средства является неуправляемым колесом (например, задним колесом). X10) Система (устройство или способ) по любому из п.п.X1-X9, в которой элемент второго ввода включает в себя элемент (модуль или этап) вычисления второй силы на колесе (например, 45, показанный на фиг.31), чтобы вычислять силу на колесе во втором направлении, по меньшей мере, из одного из скорости поворота вокруг вертикальной оси (например, скорости поворота вокруг вертикальной оси транспортного средства, считываемой посредством датчика 2 скорости поворота вокруг вертикальной оси) и поперечного ускорения (например, поперечного ускорения транспортного средства, считываемого посредством датчика 2 поперечного ускорения). X11) Система (устройство или способ) по любому из п.п.X1-X9, при этом система дополнительно содержит датчик силы на колесе во втором направлении (например, ступичные датчики 71), чтобы считывать силу на колесе во втором направлении, и элемент второго ввода включает в себя элемент (модуль или этап) оценки второй силы на колесе (например, 45, показанный на фиг.44), чтобы определять силу на колесе во втором направлении из выходного сигнала датчика силы на колесе во втором направлении. X12) Система (устройство или способ) по любому из п.п.X1-X11, в которой элемент первого ввода включает в себя элемент вычисления первой силы на колесе (43), чтобы вычислять силу на колесе в первом направлении из рабочего состояния (например, частоты вращения или значение тока) исполнительного механизма управления продольной силой колеса (например, тормозного/приводного электродвигателя 21). X13) Система (устройство или способ) по любому из п.п.X1-X12, в которой первый и второй входные элементы выполнены с возможностью вычислять силу на колесе и соотношение силы на колесе и степени скольжения колеса при условии, что увод пневматической шины равен нулю. Сила на колесе (сила на колесе в поперечном направлении, сила на колесе в продольном направлении, сила на колесе в результирующем направлении) является силой, действующей на колесо на поверхности контакта земли, и абсолютная величина силы на колесе не становится равной нулю, даже когда увод пневматической шины равен нулю. X14) Система (устройство или способ) по любому из п.п.X1-X13, в которой элемент вывода выполнен с возможностью определять параметр характеристики сцепления из соотношения силы на колесе в первом направлении и степени скольжения колеса в первом направлении и соотношения силы на колесе во втором направлении и степени скольжения колеса во втором направлении согласно заданной характеристической взаимосвязи "два-входа-один-выход" между первой входной переменной, представленной посредством первого ввода, второй входной переменной, представленной посредством второго ввода, и выходной переменной, представленной посредством вывода, характеристическая взаимосвязь представляет характеристическую кривую сцепления в продольном направлении колеса, когда вторая входная переменная равна нулю, характеристическая взаимосвязь представляет характеристическую кривую сцепления в поперечном направлении колеса, когда первая входная переменная первого ввода равна нулю, и характеристическая взаимосвязь представляет характеристическую кривую сцепления в наклонном направлении колеса, когда первая входная переменная не равна нулю (положительная или отрицательная), и вторая входная переменная не равна нулю (положительная или отрицательная). Настоящая заявка основана на первоначальной заявке на патент Японии №2008-278033, поданной 29 октября 2008 года. Содержание этой заявки включено в данный документ посредством ссылки. Кроме того, настоящее изобретение относится к международной патентной заявке PCT/JP 2008/057452, поданной 16 апреля 2008 года. Содержимое этой международной патентной заявки включено в данный документ посредством ссылки.
Реферат
Группа изобретений относится к области оценки состояния трения на поверхности контакта между колесом транспортного средства и землей или состояния сцепления с поверхностью дороги колеса транспортного средства. Предусмотрены модуль (или этап) первого ввода, модуль (или этап) второго ввода и модуль (или этап) вывода. Модуль первого ввода задает первый ввод, который является соотношением первой силы на колесе, действующей на колесо транспортного средства на поверхности контакта земли в первом направлении, и первой степени скольжения колеса. Модуль второго ввода задает второй ввод, который является соотношением второй силы на колесе, действующей на колесо транспортного средства на поверхности контакта земли во втором направлении, и второй степени скольжения колеса. Модуль вывода определяет из первого и второго вводов вывод, который является параметром характеристики сцепления, указывающим характеристику сцепления колеса транспортного средства. Группа изобретений позволяет оценивать допустимый запас относительно предела по трению с высокой точностью. 2 н. и 54 з.п. ф-лы, 51 ил.
Формула
модуль первого ввода, чтобы задавать первый ввод, который является соотношением первой силы на колесе, действующей на колесо транспортного средства на поверхности контакта с землей в первом направлении, и первой степени скольжения колеса для колеса транспортного средства;
модуль второго ввода, чтобы задавать второй ввод, который является соотношением второй силы на колесе, действующей на колесо транспортного средства на поверхности контакта с землей во втором направлении, отличном от первого направления, и второй степени скольжения колеса для колеса транспортного средства; и
модуль вывода, чтобы определять из вводов, заданных посредством модулей первого и второго ввода, вывод, который является параметром характеристики сцепления, указывающим характеристику сцепления колеса транспортного средства.
первая сила на колесе является силой на шине, действующей на шину в первом направлении,
соотношение первой силы на колесе к первой степени скольжения колеса является соотношением силы на шине в первом направлении к первой степени скольжения колеса,
вторая сила на колесе является силой на шине, действующей на шину во втором направлении,
соотношение второй силы на колесе ко второй степени скольжения колеса является соотношением силы на шине во втором направлении ко второй степени скольжения колеса,
параметр характеристики сцепления представляет градиент характеристической кривой равнодействующей силы на шине относительно результирующей степени скольжения колеса, причем результирующая степень скольжения колеса является степенью скольжения колеса, сформированной в направлении комбинации первой силы на колесе и второй силы на колесе, равнодействующая сила на шине является комбинированной силой на шине, являющейся результатом первой силы на колесе и второй силы на колесе, и модуль вывода выполнен с возможностью определения градиента характеристической кривой шины только из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса без использования коэффициента трения поверхности земли.
параметр характеристики сцепления увеличивается от нуля до наибольшего значения параметра по мере того, как, по меньшей мере, одно из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса увеличивается,
наибольшее значение параметра представляет градиент линейного сегмента характеристической кривой шины, и
модуль вывода выполнен с возможностью определения градиента нелинейного сегмента характеристической кривой шины из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса.
параметр характеристики сцепления представляет градиенты характеристики шины в случае высокого трения и характеристики шины в случае низкого трения,
модули ввода выполнены с возможностью определения текущего значения соотношения силы на колесе и степени скольжения колеса из текущего значения силы на шине и текущего значения степени скольжения колеса, и
модуль вывода выполнен с возможностью определения текущего значения параметра характеристики сцепления из текущих значений соотношений силы на колесе и степени скольжения колеса и задания значения градиента характеристической кривой шины в случае высокого трения, соответствующего текущему значению силы на шине и текущему значению степени скольжения колеса, и значения градиента характеристической кривой шины в случае низкого трения, соответствующего текущему значению силы на шине и текущему значению степени скольжения колеса, равными друг другу и равными текущему значению параметра характеристики сцепления.
параметр характеристики сцепления уменьшается ниже критического значения параметра по мере того, как, по меньшей мере, одно из соотношения первой силы на колесе и первой степени скольжения колеса и соотношения второй силы на колесе и второй степени скольжения колеса уменьшается ниже критического значения соотношения, и
параметр характеристики сцепления увеличивается выше критического значения параметра по мере того, как соотношение первой силы на колесе и первой степени скольжения колеса и соотношение второй силы на колесе и второй степени скольжения колеса увеличиваются выше критического значения соотношения.
вторая ось представляет другое из соотношения поперечной силы или силы, возникающей при повороте, и степени поперечного скольжения и соотношения продольной или движущей/тормозной силы и степени продольного скольжения.
первая и вторая оси выполнены таким образом, что безразмерная величина определяется посредством деления соотношения силы на колесе в направлении каждой оси и степени скольжения колеса на эталонное соотношение, и
третья ось выполнена таким образом, что безразмерная величина определяется посредством деления параметра характеристики сцепления на эталонный параметр.
модуль модификации выполнен с возможностью модифицирования каждого из первого и второго вводов посредством деления каждого ввода на коэффициент модификации и модифицирования вывода, определяемого из первого и второго вводов, модифицированных таким образом, посредством умножения вывода на коэффициент модификации.
модуль вывода выполнен с возможностью определения параметра характеристики сцепления первого колеса из соотношения первой силы на колесе и первой степени скольжения колеса для первого колеса и соотношения второй силы на колесе и второй степени скольжения колеса для первого колеса и параметра характеристики сцепления второго колеса из соотношения первой силы на колесе и первой степени скольжения колеса для второго колеса и соотношения второй силы на колесе и второй степени скольжения колеса для второго колеса, и
модуль оценки стабильности выполнен с возможностью оценки параметра стабильности транспортного средства из параметра характеристики сцепления первого колеса и параметра характеристики сцепления второго колеса.
этап первого ввода, чтобы задавать первый ввод, который является соотношением первой силы на колесе, действующей на колесо транспортного средства на поверхности контакта с землей в первом направлении, и первой степени скольжения колеса для колеса транспортного средства;
этап второго ввода, чтобы задавать второй ввод, который является соотношением второй силы на колесе, действующей на колесо транспортного средства на поверхности контакта с землей во втором направлении, отличном от первого направления, и второй степени скольжения колеса для колеса транспортного средства; и
этап вывода, чтобы определять из вводов, заданных посредством этапов первого и второго ввода, вывод, который является параметром характеристики сцепления, указывающим характеристику сцепления колеса транспортного средства.
Документы, цитированные в отчёте о поиске
Устройство для измерения силы трения
Комментарии