Система безопасности и управления грузоподъёмной машины - RU169157U1
Код документа: RU169157U1
Чертежи

Описание
Область техники, к которой относится полезная модель
Полезная модель относится к подъемно-транспортной технике и может быть использована в системах безопасности и управления грузоподъемных машин.
Уровень техники
Известно устройство защиты грузоподъемного крана, в котором для идентификации оператора используется модуль считывания биометрической информации (RU 2267457 C2, B66C 13/18, B66C 23/88, 27.02.2006).
Однако при использовании такого модуля могут возникать проблемы в эксплуатации, например в случае сдачи крана в аренду или при необходимости оперативной подмены машиниста крана и в других подобных ситуациях, т.к. в памяти устройства может храниться биометрическая информация только ограниченного числа лиц.
Известна также система безопасности и управления грузоподъемной машины, содержащая вычислительно-управляющее устройство и, по крайней мере, один блок расширения входов/выходов, связанные между собой с помощью общего проводного или беспроводного последовательного интерфейсного канала. Система содержит также датчики измеряемых или контролируемых параметров грузоподъемного крана, подключенные к блоку расширения входов/выходов, и/или к вычислительно-управляющему устройству, и/или к общему проводному или беспроводному последовательному интерфейсному каналу. Вычислительно-управляющее устройство включает в себя микропроцессорный контроллер, приемопередатчик последовательного интерфейса для подключения к общему системному интерфейсному каналу, стандартный компьютерный порт и радиомодуль, приспособленный для обмена информацией вычислительно-управляющего устройства с составными частями системы и внешними устройствами. К вычислительно-управляющему устройству подключены непосредственно или через устройства согласования индикатор, звуковой сигнализатор, устройство ввода команд и информации, и приемник идентификатора оператора и/или уровня доступа, в качестве которого использован радиомодуль (RU 91062 U1, B66C 23/88, B66C 23/90, 27.01.2010).
Недостатком данной системы является необходимость использования отдельного блока расширения входов-выходов, подключаемого к общему интерфейсному каналу, что усложняет конструкцию системы, снижает ее надежность и увеличивает нагрузку на общий интерфейсный канал.
Наиболее близкой к предлагаемой полезной модели по совокупности существенных признаков является система безопасности и управления грузоподъемной машины, содержащая вычислительно-управляющее устройство, включающее в себя микропроцессорный контроллер, приемопередатчик последовательного интерфейса для подключения к общему системному интерфейсному каналу, стандартный компьютерный порт и радиомодуль, приспособленный для обмена информацией вычислительно-управляющего устройства с составными частями системы и внешними устройствами. К вычислительно-управляющему устройству подключены датчики измеряемых или контролируемых параметров грузоподъемной машины, устройство ввода команд и информации, орган управления рабочими движениями, индикатор, звуковой сигнализатор и приемник идентификатора оператора и/или уровня доступа, в качестве которого использован радиомодуль. При этом индикатор, звуковой сигнализатор и устройство ввода команд и информации, подключенные к вычислительно-управляющему устройству, выполнены с ним в виде единого блока (RU 98409 U1, B66C 23/00, 24.05.2010).
Данная система обладает высокой надежностью, широкими функциональными возможностями и в комплексе решает задачу управления, контроля и безопасности грузоподъемной машины. Однако размещение индикатора, звукового сигнализатора, приемника идентификатора оператора и/или уровня доступа и всех элементов интерфейсов и портов в одном блоке с вычислительно-управляющим устройством накладывает ограничения на условия размещения вычислительно-управляющего устройства: оно должно быть размещено в зоне видимости и легкого доступа оператора, отсутствия препятствий для прохождения радиоволн между оператором и устройством. Наиболее благоприятным с этой точки зрения местоположением вычислительно-управляющего устройства является кабина оператора. Однако размещение его в кабине потребовало бы проводить в кабину большое количество электрических кабелей и жгутов извне для подключения датчиков и исполнительных устройств системы управления и безопасности грузоподъемной машины. Кроме того, это воспрепятствовало бы использованию имеющегося радиоканала для организации беспроводной связи с датчиками и пультами дистанционного управления системы (при наличии таковых), т.к. металлические стенки кабины не прозрачны для радиоволн.
Раскрытие полезной модели
Задачей, на решение которой направлено предлагаемая полезная модель, является обеспечение удобства монтажа и использования системы безопасности и управления грузоподъемной машины, а также расширение ее функциональных возможностей.
Поставленные технические задачи решаются тем, что система безопасности и управления грузоподъемной машины, содержащая вычислительно-управляющее устройство, включающее в себя микропроцессорный контроллер, приемопередатчик последовательного интерфейса для подключения к общему системному интерфейсному каналу, стандартный компьютерный порт и радиомодуль, приспособленный для обмена информацией вычислительно-управляющего устройства с составными частями системы и внешними устройствами, и подключенные к вычислительно-управляющему устройству датчики измеряемых или контролируемых параметров грузоподъемной машины, орган управления рабочими движениями, индикатор, звуковой сигнализатор и приемник идентификатора оператора и/или уровня доступа, согласно полезной модели система снабжена подключенной к вычислительно-управляющему устройству выносной панелью, на которой установлены индикатор, звуковой сигнализатор и соединитель стандартного компьютерного порта.
Достижению технического результата способствуют также частные существенные признаки полезной модели.
На выносной панели дополнительно установлен приемник идентификатора оператора и/или уровня доступа, в качестве которого использовано устройство чтения RFID карт.
На выносной панели дополнительно установлен соединитель системного последовательного интерфейса.
Сущность полезной модели заключается в следующем.
Снабжение системы безопасности и управления грузоподъемной машины, подключенной к вычислительно-управляющему устройству, выносной панелью, на которой установлены индикатор, звуковой сигнализатор и соединитель стандартного компьютерного порта, позволяет разместить эти элементы в кабине оператора в зоне комфортного доступа, а вычислительно-управляющее устройство разместить за пределами кабины в месте, удобном для подключения этого устройства к датчикам и исполнительным механизмам. При этом если в системе используются датчики или управляющие устройства, подключаемые к вычислительно-управляющему устройству по радиоканалу, то упрощается выбор места установки вычислительно-управляющего устройства, обеспечивающего его надежную радиосвязь с внешними устройствами. Это позволяет обеспечить удобный монтаж системы и расширить ее функциональные возможности за счет возможности использования беспроводных датчиков и управляющих устройств.
Установка на выносной панели приемника идентификатора оператора и/или уровня доступа, в качестве которого использовано устройство чтения RFID карт, обеспечивает удобную идентификацию оператора с помощью широко распространенных дешевых средств.
Установка на выносной панели соединителя системного последовательного интерфейса вместе с индикатором, звуковым сигнализатором и соединителем стандартного компьютерного порта обеспечивает удобный доступ для подключения стандартной интерфейсной шины системы к компьютеру (при необходимости, через адаптер) для диагностики работы системы и ее составных частей, установки и отладки программного обеспечения системы.
Технический результат от использования данной полезной модели заключается в обеспечении удобства монтажа и использования системы безопасности и управления грузоподъемной машины и расширении ее функциональных возможностей.
Приведенные далее описание предлагаемой системы и сопровождающие чертежи предназначены только для иллюстрации полезной модели и ни в коем случае не ограничивают объема формулы полезной модели.
Краткое описание чертежей
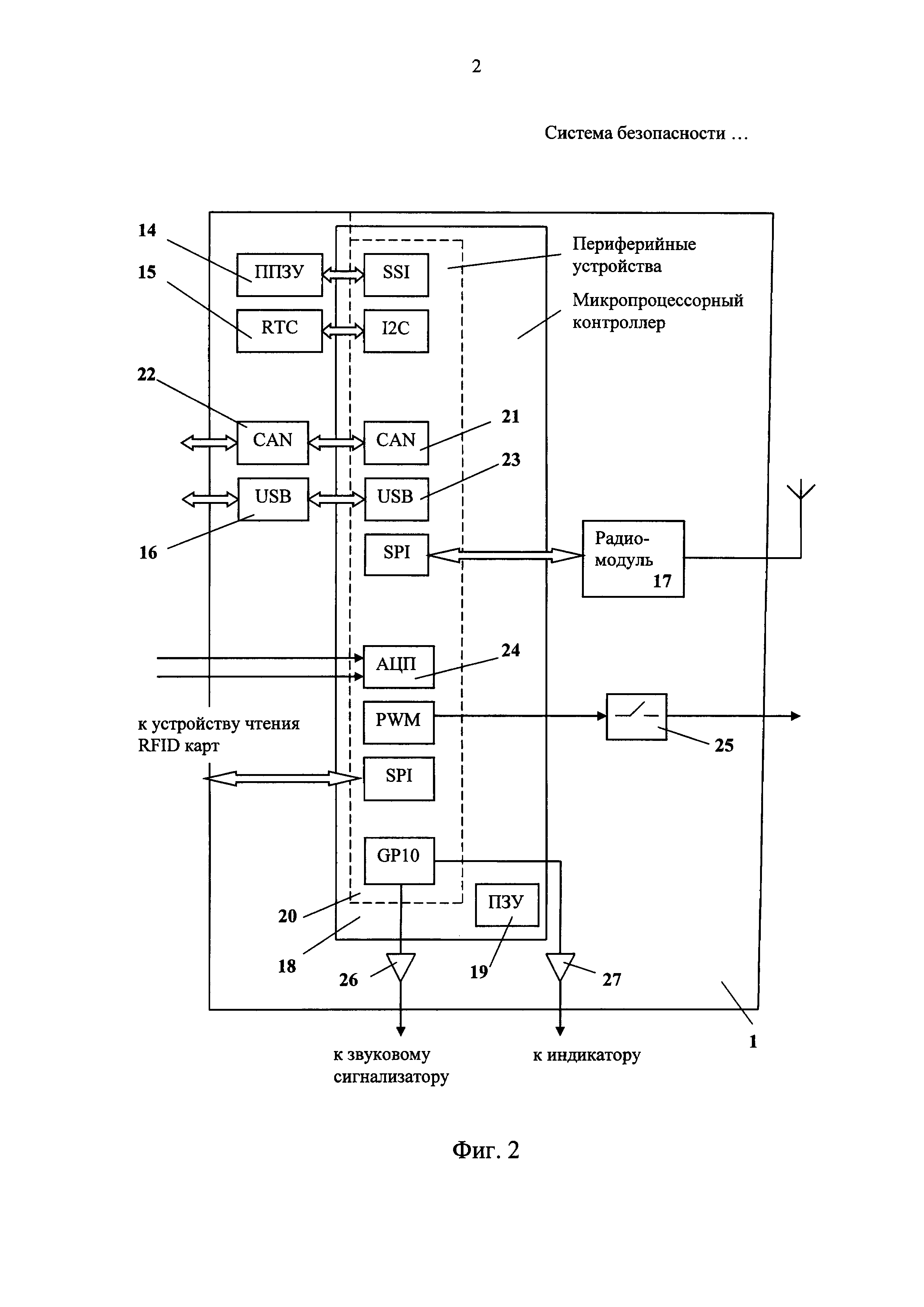
На фиг. 1 представлена функциональная схема одного из примеров выполнения предлагаемой системы безопасности и управления грузоподъемной машины; на фиг. 2 - функциональная схема вычислительно управляющего устройства. На приведенных рисунках одни и те же элементы обозначены одинаковыми позициями.
Осуществление полезной модели
Система безопасности и управления грузоподъемной машины, например, грузоподъемного крана стрелового типа, содержит связанные с помощью беспроводной линии связи вычислительно-управляющее устройство 1 и пульт дистанционного управления 2. К вычислительно-управляющему устройству 1 подключена выносная панель 3 интерактивной связи с оператором грузоподъемного крана, на которой установлены индикатор 4, звуковой сигнализатор 5, соединитель 6 стандартного компьютерного порта USB, соединитель 7 системного последовательного интерфейса CAN и устройство 8 чтения RFID карт.
Вычислительно-управляющее устройство 1 расположено за пределами кабины крана в месте, удобном для подключения данного устройства к датчикам системы и исполнительным механизмам. Выносная панель 3 расположена в кабине оператора в зоне комфортного доступа.
К вычислительно-управляющему устройству 1 подключаются блок пропорциональных гидрораспределителей, электрооборудование шасси и электроника управления двигателем.
Система содержит также датчики измеряемых или контролируемых параметров грузоподъемного крана с аналоговыми, цифровыми и дискретными выходными сигналами. Конкретный набор датчиков, используемых в системе, зависит от типа грузоподъемной машины. В частности, для грузоподъемного крана стрелового типа могут быть следующие датчики:
ограничитель 9 подъема крюка с радиоканалом, расположенный на оголовке телескопической стрелы;
датчики 10 с цифровыми выходными сигналами, расположенные на корневой секции стрелы (датчик длины стрелы и датчик угла наклона стрелы), подключенные к общему проводному последовательному внутрисистемному интерфейсному каналу, обеспечивающему магистральную структуру соединения составных частей системы;
датчики, расположенные на поворотной платформе. Это датчики 11 с цифровыми выходными сигналами (датчик азимута, совмещенный с датчиком крена, датчики давления в напорных магистралях, датчики давления в поршневой и штоковой полостях гидроцилиндра подъема стрелы, датчик массы противовеса), подключенные к общему проводному последовательному внутрисистемному интерфейсному каналу, датчики 12 с аналоговыми выходными сигналами (датчик температуры, рукоятки управления, расположенные в кабине, и др.) и датчики 13 с дискретными выходными сигналами (концевые выключатели), подключенные к дополнительным входам вычислительно-управляющего устройства 1;
датчики на неповоротной части крана (датчики положения выдвижных опор, датчики усилия в опорах), подключаемые по необходимости к дополнительному блоку расширения (на чертеже не показаны).
Вычислительно-управляющее устройство 1 содержит: перепрограммируемое энергонезависимое запоминающее устройство 14 (ППЗУ);
энергонезависимые часы 15 реального времени (RTC);
один или несколько стандартных компьютерных портов 16 USB для подключения к хост-компьютеру либо других внешних устройств, поддерживаемых операционной системой;
радиомодуль 17, обеспечивающий работу общей беспроводной линии связи;
микропроцессорный контроллер 18, приспособленный для выполнения как 32-битного, так и 16-битного набора инструкций и содержащий постоянное запоминающее устройство 19 с программой начальной загрузки и периферийные устройства 20 для сопряжения с внешними устройствами, в том числе контроллер 21 стандартного интерфейса CAN, подключенный к приемопередатчику 22 CAN для связи с другими составными частями системы, и контроллер 23 стандартного компьютерного интерфейса USB, подключенный к компьютерному порту 16 USB;
аналого-цифровой преобразователь 24, встроенный в микропроцессорный контроллер 18;
выходные ключи 25, приспособленные для формирования релейных и широтно-импульсных управляющих сигналов;
и два усилителя 26 и 27, к выходам которых подключаются звуковой сигнализатор 5 и индикатор 4.
Система безопасности грузоподъемного крана работает следующим образом.
В однократно программируемое постоянное запоминающее устройство 19 микропроцессорного контроллера 18 прошивается программа начальной загрузки. Алгоритм работы системы безопасности определяется рабочей программой, подготовленной на компьютере в среде программирования, например IAR и т.п. Полученный программный код заносится в перепрограммируемое энергонезависимое запоминающее устройство 14 из компьютера или иного устройства для программирования, подключенного с помощью стандартного последовательного интерфейса, например USB, к вычислительно-управляющему устройству 1 через приемопередатчик 16. Сформированный программный код может быть предварительно зашифрован для предотвращения использования его посторонними лицами. Загрузка программного кода в перепрограммируемое энергонезависимое запоминающее устройство 14 производится под управлением программы-загрузчика, которая производит проверку сертификата и производит дешифровку загружаемого кода рабочей программы. После программирования, установки и подключения составных частей системы на кране она готова к работе.
После завершения процесса загрузки запускается программа самодиагностики системы безопасности. В процессе загрузки и самодиагностики микропроцессорный контроллер 20 не формирует команд разрешения движений крана. Микропроцессорный контроллер 18 опрашивает устройство 8 чтения RFID карт и сравнивает коды доступа, содержащиеся в этой информации, с хранящимися в перепрограммируемом энергонезависимом запоминающем устройстве 14 микропроцессорного контроллера 18.
После завершения самодиагностики системы в случае подтверждения прав оператора микропроцессорный контроллер 18 опрашивает также USB порт на наличие подключения к соединителю 6 накопителя информации (USB-flash). При наличии подключенного накопителя производится с помощью индикатора 4 соответствующая предупреждающая сигнализация о считывании информации из встроенного регистратора параметров системы, использующего перепрограммируемое энергонезависимое запоминающее устройство 14 для хранения информации, на USB-flash. По окончании процесса считывания информации индикатор 4 выдает соответствующий сигнал.
После этого запускается рабочая программа, определяющая алгоритм функционирования системы безопасности.
В процессе выполнения рабочей программы микропроцессорный контроллер 18 опрашивает через общий внутрисистемный канал последовательного интерфейса значения рабочих параметров крана, замеренных датчиками, подключенных к общему внутрисистемному интерфейсному каналу, а также датчики, подключенные к встроенному аналого-цифровому преобразователю 24. Микропроцессорный контроллер 18 опрашивает по радиоканалу беспроводной датчик 9 и пульт дистанционного управления 2. На основании принятых сигналов от датчиков микропроцессорным контроллером 18 производится вычисление рабочих параметров крана и анализ его состояния, определяются разрешенные и опасные движения. В зависимости от результатов этого анализа микропроцессорный контроллер 18 в соответствии с сигналами от пульта 2 формирует сигналы управления ключами 25. Разрешаются только те движения крана, которые безопасны в данный момент.
Одновременно микропроцессорным контроллером 18 осуществляется формирование сигналов управления индикатором 4 и звуковым сигнализатором 5, а также запись и хранение в специально выделенной области перепрограммируемого энергонезависимого запоминающего устройства 14 рабочих параметров крана и данных об операторе (регистрация параметров) в фиксированные с помощью часов 15 моменты времени.
Эта информация затем может быть считана в компьютер для расшифровки и последующей обработки непосредственно через приемопередатчик 16 стандартного последовательного интерфейса, либо с помощью специализированного считывающего устройства, подключаемого к соединителю 6.
Промышленная применимость
Заявленная система может быть изготовлена промышленным способом на приборостроительном предприятии с использованием современных электронных компонентов и технологий.
Вычислительно-управляющее устройство может быть выполнено в виде одноплатного компьютера. В качестве микропроцессорного контроллера может использоваться высоко интегрированный микропроцессорный контроллер, например LPC4300.
В качестве радиомодуля может использоваться nRF24L01.
В качестве датчиков измеряемых или контролируемых параметров грузоподъемного крана можно использовать специализированные датчики, используемые в выпускаемых приборах и системах безопасности, либо общепромышленные датчики соответствующего исполнения.
В качестве запоминающих устройств могут быть использованы специализированные микросхемы. Например, в качестве перепрограммируемого энергонезависимого запоминающего устройства можно использовать одну или несколько микросхем AT45DB642D-CNU.
В качестве энергонезависимых часов реального времени может быть использована, например, микросхема с подключенным к ней литиевым элементом питания, а в качестве приемопередатчиков последовательного интерфейса - микросхемы DS1307.
Реферат
Полезная модель относится к подъемно-транспортной технике и может быть использована в системах безопасности и управления грузоподъемных машин. Система содержит вычислительно-управляющее устройство, включающее в себя микропроцессорный контроллер, приемопередатчик последовательного интерфейса для подключения к общему системному интерфейсному каналу, стандартный компьютерный порт и радиомодуль, приспособленный для обмена информацией вычислительно-управляющего устройства с составными частями системы и внешними устройствами, и подключенные к вычислительно-управляющему устройству датчики измеряемых или контролируемых параметров грузоподъемной машины, орган управления рабочими движениями, индикатор, звуковой сигнализатор и приемник идентификатора оператора и/или уровня доступа. Система снабжена подключенной к вычислительно-управляющему устройству выносной панелью, на которой установлены индикатор, звуковой сигнализатор и соединитель стандартного компьютерного порта. Технический результат - обеспечение удобства монтажа и использования системы и расширение ее функциональных возможностей. 2 з.п. ф-лы, 2 ил.
Комментарии