Транспортное средство, способ и система для планирования режимов транспортного средства с использованием изученных предпочтений пользователя - RU2683902C2
Код документа: RU2683902C2
Чертежи



Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение в общем относится к транспортным средствам с множеством режимов динамики движения и, в частности, к планированию режимов транспортного средства с использованием изученных предпочтений пользователя.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[0002] Транспортные средства с множеством режимов динамики движения становятся все более популярными. Эти режимы изменяют настройки множества подсистем транспортного средства, например, систем рулевого управления, силовой передачи, шасси, внутреннего освещения, звукоизоляции и/или фильтрации информационно-развлекательного контента и т.д. Режимы обеспечивают пользователю гибкость путем изменения поведения транспортного средства для разных условий движения и лучшего соответствия предпочтениям водителя с точки зрения производительности.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] В настоящем документе раскрыто транспортное средство, содержащее:
датчики для отслеживания данных транспортного средства;
память для хранения множества классификаторов, принятых от сервера, причем классификаторы выполнены с возможностью прогнозирования предпочтения в отношении перехода из первого режима во второй режим на основе подмножества данных транспортного средства; и
процессор, коммуникативно связанный с памятью и датчиками, причем процессор выполнен с возможностью:
выбора одного из множества классификаторов на основе условий движения;
применения данных транспортного средства в отношении выбранного из множества классификатора для генерации рекомендации о том, следует ли переключаться на второй режим при следовании по маршруту; и
в ответ на генерацию рекомендации переключения на второй режим отображения рекомендации на информационно-развлекательном головном блоке.
[0004] В настоящем документе раскрыт способ, содержащий этапы, на которых:
отслеживают посредством первого процессора данные транспортного средства, когда при транспортное средство меняет первый режим на второй режим;
анализируют посредством второго процессора данные транспортного средства для идентификации предпочтения для второго режима в условиях движения;
генерируют рекомендацию о том, следует ли переключаться на второй режим при следовании по маршруту, на основе данных транспортного средства и условий движения; и
представляют рекомендацию водителю.
Заявленный способ включает в себя этап, на котором в ответ на генерацию рекомендации переключения на второй режим движения автоматически переключают транспортное средство на второй режим.
Причем в заявленном способе условия движения представляют собой по меньшей мере одно из географической области, времени суток или дня недели.
Причем в заявленном способе для анализа данных транспортного средства для идентификации предпочтения для второго режима в условиях движения способ дополнительно включает в себя этап, на котором генерируют потенциально подходящий классификатор путем применения методов планирования эксперимента и методов машинного обучения в отношении данных транспортного средства, причем классификатор выполнен с возможностью прогнозирования предпочтения в отношении перехода из первого режима во второй режим на основе подмножества данных транспортного средства.
Заявленный способ включает в себя этап, на котором отклоняют потенциально подходящий классификатор, если потенциально подходящий классификатор не удовлетворяет пороговому значению атрибута.
Заявленный способ включает в себя этап, на котором отклоняют потенциально подходящий классификатор, если потенциально подходящий классификатор не соответствует классификационному пороговому значению.
В заявленном способе генерация рекомендации о том, следует ли переключаться на второй режим при следовании по маршруту, на основе данных транспортного средства и условий движения включает в себя этапы, на которых:
выбирают классификатор из множества классификаторов на основе условий движения; и
применяют данные транспортного средства в отношении выбранного классификатора.
[0005] Заявлена система, содержащая:
сервер, выполненный с возможностью анализа данных транспортного средства для идентификации предпочтения водителя в отношении переключения с первого режима на второй режим в условиях движения;
транспортное средство, выполненное с возможностью:
отслеживания данных транспортного средства, когда транспортное средство меняет первый режим на второй режим;
генерации рекомендации о том, следует ли переключаться на второй режим при следовании по маршруту, на основе классификатора, принятого от сервера; и
представления рекомендации водителю.
Причем в заявленной системе в ответ на генерацию рекомендации переключения на второй режим движения транспортное средство выполнено с возможностью автоматического переключения на второй режим.
Причем в заявленной системе условия движения представляют собой по меньшей мере одно из географической области, времени суток или дня недели.
Причем в заявленной системе для анализа данных транспортного средства для идентификации предпочтения для второго режима в условиях движения сервер выполнен с возможностью генерации потенциально подходящего классификатора путем применения методов планирования эксперимента и методов машинного обучения в отношении данных транспортного средства, причем классификатор выполнен с возможностью прогнозирования предпочтения в отношении перехода из первого режима во второй режим на основе подмножества данных транспортного средства.
[0006] Причем в заявленной системе сервер выполнен с возможностью отклонения потенциально подходящего классификатора, если потенциально подходящий классификатор не удовлетворяет пороговому значению атрибута.
Причем в заявленной системе сервер выполнен с возможностью отклонения потенциально подходящего классификатора, если потенциально подходящий классификатор не удовлетворяет классификационному пороговому значению.
Причем в заявленной системе для генерации рекомендации о том, следует ли переключаться на второй режим при следовании по маршруту, на основе данных транспортного средства и условий движения, транспортное средство выполнено с возможностью:
выбора классификатора из множества классификаторов, принятых от сервера, на основе условий движения; и
применения данных транспортного средства в отношении выбранного классификатора.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Для лучшего понимания изобретения может быть сделана ссылка на варианты осуществления, показанные на следующих далее чертежах. Компоненты на чертежах необязательно выполнены в масштабе, и связанные элементы могут быть опущены, или в некоторых примерах пропорции могут быть преувеличены так, чтобы подчеркнуть и наглядно проиллюстрировать новые описанные в настоящем документе признаки. Кроме того, компоненты системы могут быть расположены различным образом, известным в уровне техники. Кроме того, на чертежах одинаковые ссылочные позиции обозначают соответствующие части на различных видах.
[0008] Фиг. 1 представляет собой схему системы для реализации планирования режимов транспортного средства с использованием изученных предпочтений пользователя в соответствии с замыслами настоящего изобретения.
[0009] Фиг. 2 представляет собой структурную схему преобразователя режимов на Фиг. 1.
[0010] Фиг. 3 представляет собой структурную схему процессорной платформы, которая может быть использована для реализации преобразователя режимов на Фиг. 1 и 2.
[0011] Фиг. 4 представляет собой структурную схему электронных компонентов, которые могут быть использованы для реализации менеджера режимов на Фиг. 1.
[0012] Фиг. 5 представляет собой блок-схему последовательности операций примерного способа генерации профиля режимов для пользователя, который может быть реализован процессорной платформой на Фиг. 3.
[0013] Фиг. 6 представляет собой блок-схему последовательности операций примерного способа прогнозирования режимов движения транспортного средства на основе профиля режимов, который может быть реализован электронными компонентами на Фиг. 4.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0014] Хотя изобретение может быть выполнено в различных формах, на чертежах показаны и далее будут описаны некоторые примерные и неограничивающие варианты осуществления с пониманием, что настоящее раскрытие следует рассматривать как иллюстративный пример изобретения, а не как ограничение изобретения конкретными проиллюстрированными вариантами осуществления.
[0015] Транспортные средства (например, легковые автомобили, грузовики, фургоны и т.д.) имеют множество режимов движения, которые обеспечивают разную динамику движения. Например, транспортное средство может иметь спортивный режим, нормальный режим, комфортный режим, один или более внедорожных режимов (например, режимы для конкретных типов рельефа, таких как грунтовые дороги и т.д.) и/или режим экономии топлива и т.д. Режимы изменяют настройки (например, различных электронных блоков управления (ECU)) транспортного средства для изменения баланса различных предпочтений движения. Например, спортивный режим может изменять рулевое управление, управление коробкой передач, управление дросселем, контроль тяги и/или контроль устойчивости для улучшения производительности и управления транспортным средством за счет топливной эффективности транспортного средства. Со временем водитель может выработать предпочтения в отношении того, какой режим должен использоваться в различных ситуациях и приоритетах, например, экономия топлива против удовольствия от движения.
[0016] Как раскрыто более подробно ниже, транспортное средство включает в себя менеджер данных режимов, который получает данные от подсистем транспортного средства (например, рулевого управления, управления коробкой передач управления дросселем, контроля тяги, контроля устойчивости, координаты системы глобального позиционирования (GPS) и т.д.) при изменении водителем режима движения транспортного средства. Субъект, осуществляющий поддержку транспортного средства, принимает полученные данные от менеджера данных режимов и генерирует профиль режимов транспортного средства на основе полученных данных и данных, извлеченных из полученных данных. Например, ограничение скорости, уровень земли и уровень загруженности дорог могут быть получены от источников данных, внешних по отношению к транспортному средству. Субъект, осуществляющий поддержку транспортного средства, представляет собой любой подходящий субъект (например, производителя транспортного средства, продавца транспортного средства, продавца запасных частей, компанию по управлению данными и т.д.), обеспечивающий услуги по поддержке транспортного средства. Менеджер режимов принимает профиль режимов транспортного средства от субъекта, осуществляющего поддержку транспортного средства. Менеджер данных режимов отслеживает подсистемы транспортного средства. На основе подсистем транспортного средства и профиля режимов транспортного средства менеджер режимов рекомендует режим движения (например, посредством дисплея центральной консоли, проекционного дисплея, дисплея на приборной панели и т.д.) или автоматически переключает транспортное средство в рекомендуемый режим движения (например, если транспортное средство является автономным или полуавтономным транспортным средством).
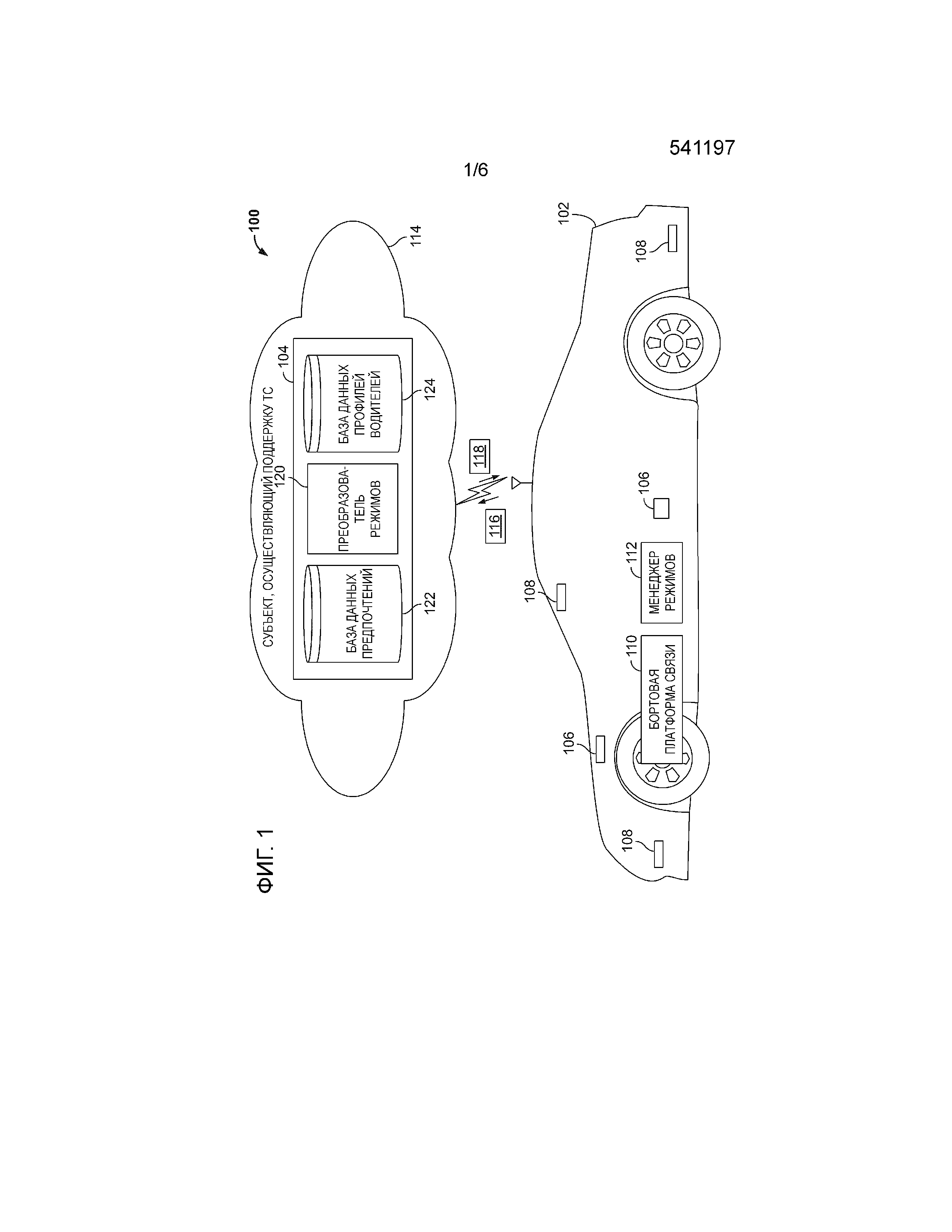
[0017] Фиг. 1 представляет собой примерную систему 100 для реализации планирования режимов транспортного средства с использованием изученных предпочтений пользователя в соответствии с замыслами настоящего изобретения. В проиллюстрированном примере система 100 включает в себя транспортное средство 102 (например, легковой автомобиль, грузовик, фургон и т.д.) и субъект 104, осуществляющий поддержку транспортного средства (например, производитель транспортного средства, продавец транспортного средства, продавец запасных частей, компания по управлению данными и т.д.). Транспортное средство 102 может представлять собой стандартное бензиновое транспортное средство, гибридное транспортное средство, электрическое транспортное средство, транспортное средство на топливных элементах или любой другой тип реализации способности к движению транспортного средства. Транспортное средство 102 может быть неавтономным, полуавтономным или автономным. Транспортное средство 102 включает в себя части, связанные со способностью к движению, такие как силовая передача с двигателем, коробка передач, подвеска, карданный вал и/или колеса и т.д. Примерное транспортное средство 102 включает в себя электронные блоки управления (ECU) 106, датчики 108, бортовую платформу 110 связи и менеджер 112 режимов.
[0018] ECU 106 отслеживают и управляют системами (например, системой рулевого управления, системой управления торможением, системой управления коробкой передач, системой управления двигателем и т.д.) транспортного средства 102. Некоторые транспортные средства 102 могут иметь семьдесят или более ECU 106, расположенных в различных местах вокруг транспортного средства 102. ECU 106 представляют собой отдельные наборы электроники, которые включают в себя собственную схему/схемы (например, интегральные схемы, микропроцессоры, память, хранилище и т.д.) и микропрограммное обеспечение, датчики, исполнительные устройства и/или установочное оборудование. Режимы движения определяются настройками различных ECU 106. Например, режим экономии топлива может настраивать систему управления коробкой передач на переключение на более высокую передачу при меньшем числе оборотов в минуту (об/мин) и/или систему управления дросселем на снижение быстроты реагирования дросселя и т.д.
[0019] Датчики 108 могут быть расположены в транспортном средстве 102 и вокруг транспортного средства 102 любым подходящим образом. Датчики 108 могут включать в себя камеру/камеры, сонар, радиолокатор, лидар, ультразвуковые датчики, оптические датчики или инфракрасные устройства, выполненные с возможностью определения характеристик вокруг внешней части транспортного средства 102. Кроме того, некоторые датчики 108 могут быть установлены в пассажирском салоне транспортного средства 102 или в кабине транспортного средства 102 (например, в отсеке двигателя, нишах колес и т.д.) для измерения характеристик во внутренней области транспортного средства 102. Например, такие датчики 108 могут включать в себя акселерометры, одометры, датчики тангажа и рыскания, датчики скорости колес, камеры, микрофоны и термисторы, датчики давления в шинах, биометрические датчики и т.д. Датчики 108 обеспечивают условия, при которых пользователь изменяет режим движения транспортного средства 102.
[0020] Бортовая платформа 110 связи включает в себя проводные или беспроводные сетевые интерфейсы для обеспечения связи с внешней сетью 114. Бортовая платформа 110 связи также включает в себя аппаратное обеспечение (например, процессоры, память, хранилище и т.д.) и программное обеспечение для управления проводными или беспроводными сетевыми интерфейсами. Кроме того, внешняя сеть/сети 114 может/могут представлять собой сеть общего пользования, например, интернет; частную сеть, например, интранет; или их сочетание, и может/могут использовать множество сетевых протоколов доступных сейчас или разработанных в будущем, включая, но не ограничиваясь, сетевые протоколы на основе TCP/IP. Бортовая платформа 110 связи также может включать в себя проводной или беспроводной интерфейс для обеспечения прямой связи с электронным устройством (таким как, смартфон, планшетный компьютер, переносной компьютер и т.д.).
[0021] Менеджер 112 режимов отслеживает (a) режим движения транспортного средства 102 и (b) данные от ECU 106 и датчиков 108. Менеджер 112 режимов генерирует запись 116 события режима в ответ на обнаружение изменения режима движения транспортного средства 102. Например, водитель может выбирать режим путем нажатия кнопки на центральной консоли и/или на сенсорном экране информационно-развлекательного головного блока (например, информационно-развлекательного головного блока 402 на Фиг. 4, описанной ниже) транспортного средства 102. Если водитель транспортного средства 102 идентифицирован, запись 116 события режима связывается с профилем водителя. Таким образом, создаются профили 118 режимов с учетом предпочтений конкретного водителя/водителей. В некоторых примерах менеджер 112 режимов различает (i) изменения режима движения вследствие активации водителями элемента управления и (ii) изменения режима движения автоматизированной системой, такой как система в автономном или полуавтономном транспортном средстве, или даже менеджером 112 режимов. В таких примерах менеджер 112 режимов генерирует запись 116 события изменения режима в ответ на изменение водителем режима движения, но не генерирует запись 116 события режима в ответ на изменение режима движения автоматизированной системой.
[0022] Менеджер 112 режимов включает в записи 116 события изменения режима данные за период времени (например, две минуты, пять минут и т.д.) до изменения режима движения и период времени (например, тридцать секунд, одна минута и т.д.) после изменения режима движения. Запись 116 события режима включает в себя (a) данные, полученные от навигационной системы (например, географическое местоположение, маршрут и т.д.), (b) данные о режимах транспортного средства (например, текущий режим, прошлые режимы, уровень автономности транспортного средства и т.д.), (c) данные, полученные ECU 106 и датчиками 108 (например, настройки коробки передач, скорости колес, температура двигателя, давление в шинах и т.д.), (d) дорожные данные (например, состояния дорог, ограничения скорости, тип покрытия, степень неровности дорожной поверхности, перепады высот, радиус дороги, количество изменений ограничения скорости на милю и т.д.), (e) данные об условиях окружающей среды (например, погода, температура и т.д.), (f) данные о характеристиках водителя (например, манера вождения, намерение вождения и т.д.), (g) данные времени (например, день, дата, время суток и т.д.) и/или (h) данные о транспортном средстве (например, вес, класс, модель, настройки силовой передачи, набор функций и т.д.). Данные, собранные менеджером 112 режимов, иногда называются в настоящем документе «данными динамики транспортного средства». Кроме того, запись 116 события режима включает в себя режим движения до изменения режима движения и режим движения после изменения режима движения. В некоторых примерах дорожные данные включают в себя подробные картографические данные, такие как ограничения скорости, изгибы дорог, перепады высот и т.д., обеспеченные интеллектуальной системой помощи водителю (ADAS). Кроме того, дорожные данные включают в себя информацию, полученную из данных от ECU 106 и датчиков 108. Например, состояние дороги (например, покрытая льдом, мокрая, покрытая снегом, песчаная, гравийная и т.д.) могут быть получены из данных от датчиков скорости колес и системы контроля устойчивости.
[0023] Время от времени (например, периодически, апериодически и т.д.) менеджер 112 режимов передает запись 116 события режима субъекту 104, осуществляющему поддержку транспортного средства, посредством бортовой платформы 110 связи. В некоторых примерах менеджер 112 режимов может периодически передавать множество записей 116 событий изменения режима (например, ежедневно, еженедельно и т.д.). В некоторых примерах менеджер 112 режимов ожидает до тех пор, пока транспортное средство 102 не будет подключено к внешней сети 114 через соединение WLAN без использования сотовых данных. В некоторых примерах менеджер 112 режимов передает запись 116 события режима при создании записи 116 события режима.
[0024] Менеджер 112 режимов принимает профиль 118 режимов от субъекта 104, осуществляющего поддержку транспортного средства. В некоторых примерах профиль 118 режимов связан с транспортным средством 102. В таких примерах профиль 118 режимов показывает сочетание предпочтений водителя транспортного средства 102. В некоторых примерах профиль 118 режимов связан с профилем водителя. В таких примерах профиль 118 режимов загружается из субъекта 104, осуществляющего поддержку транспортного средства, при идентификации водителя системой идентификации водителя. В некоторых примерах профиль 118 режимов может быть связан с пассажиром транспортного средства 102. Таким образом, водитель может использовать рекомендации, основанные на профиле 118 режимов, для вождения в приятной для пассажира манере. Профиль 118 режимов связывает данные динамики транспортного средства с возможными режимами движения транспортного средства 102. В некоторых примерах профиль 118 режимов связан с конкретной географической областью или конкретным маршрутом. Менеджер 112 режимов применяет данные динамики транспортного средства в отношении профиля 118 режимов. Менеджер 112 режимов применяет данные динамики транспортного средства в отношении профиля 118 режимов для генерации рекомендации по активации режима движения. В некоторых примерах менеджер 112 режимов на основе профиля 118 режимов также генерирует весовое значение, связанное с рекомендацией. Таким образом, водитель может выбирать реакцию на рекомендацию на основе весового значения. Менеджер 112 режимов посредством информационно-развлекательного головного блока акустически и/или визуально представляет рекомендацию водителю. В некоторых примерах, если транспортное средство 102 является автономным или полуавтономным, менеджер 112 режимов побуждает транспортное средство 102 к переходу в рекомендуемый режим движения.
[0025] Как раскрыто более подробно ниже в отношении Фиг. 2, субъект 104, осуществляющий поддержку транспортного средства, анализирует записи 116 событий режима, принятые от транспортного средства 102, и генерирует профиль 118 режимов для транспортного средства 102. В проиллюстрированном примере субъект 104, осуществляющий поддержку транспортного средства, включает в себя сервер, выполненный на внешней сети 114. В некоторых примерах субъект 104, осуществляющий поддержку транспортного средства, включает в себя один или более интернет-серверов (иногда называемых «облачными»). В проиллюстрированном примере субъект 104, осуществляющий поддержку транспортного средства, включает в себя преобразователь 120 режимов, базу 122 данных предпочтений и базу 124 данных профилей водителей.
[0026] Преобразователь 120 режимов анализирует записи 116 событий изменения режима, принятые от транспортного средства 102, и генерирует профиль 118 режимов для транспортного средства 102. Профиль 118 режимов содержит один или более классификаторов, которые используют данные, отслеживаемые менеджером 112 режимов для (a) прогнозирования режимов движения на основе частых мест назначения и маршрутов, (b) прогнозирования режимов движения на основе среднего предпочтения водителя и/или (c) прогнозирования режимов движения на основе подобных водителей. Время от времени преобразователь 120 режимов передает профиль 118 режимов в транспортное средство 102. Например, преобразователь 120 режимов может передавать профиль 118 режимов после генерации или обновления профиля 118 режимов. В качестве другого примера преобразователь 120 режимов может передавать профиль 118 режимов в ответ на обнаружение, что текущий профиль 118 режимов, загруженный в транспортное средство 102, не включает в себя маршрут, по которому движется транспортное средство 102, но для подобных водителей на маршруте существует один или более профилей 118 режимов.
[0027] На основе данных динамики транспортного средства в записях 116 событий режима преобразователь 120 режимов генерирует шаблонную карту, которая связывает данные динамики транспортного средства с изменениями режима движения. Преобразователь 120 режимов сводит шаблонную карту к потенциально подходящим классификаторам. Потенциально подходящий классификатор связан с подмножеством данных динамики транспортного средства для генерации рекомендации режима. Например, один из потенциально подходящих классификаторов может генерировать рекомендацию режима на основе значения состояния дороги (например, мокрая дорога, покрытая льдом, гравийная, грязная и т.д.) и значения кривизны дороги (например, прямая дорога, 20-ти градусная кривизна и т.д.). Потенциально подходящие классификаторы могут быть одномерными (например, значение одной переменной в данных динамики транспортного средства используется для генерации рекомендации) или многомерными (например, две или более переменных в данных динамики транспортного средства используются для генерации рекомендации). В некоторых примерах преобразователь 120 режимов использует полный факторный, дробный факторный или другой план экспериментальных способов для определения набора возможных шаблонных карт с разными комбинациями входных данных (например, разными комбинациями данных динамики транспортного средства). Одна из шаблонных карт может состоять из всех входных сигналов, но все остальные потенциально подходящие карты будут иметь только подмножество всех входных данных. Каждая потенциально подходящая карта будет иметь классификатор, основанный на подмножествах ее входных данных. Классификатор обучен, и его производительность записана. Преобразователь 120 режимов выполняет классификационные тесты для потенциально подходящих классификаторов для выбора одного из потенциально подходящих классификаторов. Потенциально подходящие классификаторы оцениваются на основе сложности (например, количества входных данных) и производительности (например, скорости точного прогнозирования). Этот процесс включает перекрестную проверку, при которой доступные данные итеративно делятся на данные обучения и данные проверки для получения всех показателей производительности. Преобразователь 120 режимов выбирает один из потенциально подходящих классификаторов для включения в профиль 118 режимов, отправляет в транспортное средство 102.
[0028] Когда преобразователю 120 режимов не достаточно записей 116 событий изменения режима, связанных с географической областью и/или навигационным маршрутом, по которому движется транспортное средство 102, для генерации потенциально подходящего классификатора, который пройдет классификационные тесты (например, преобразователь 120 режимов отклоняет потенциально подходящие классификаторы), преобразователь 120 режимов сравнивает профиль водителя, сохраненный в базе 124 данных профилей водителей, связанной с транспортным средством 102, с профилями предпочтений, сохраненными в базе 122 данных предпочтений. Профили предпочтений связывают классификаторы режимов с демографическими данными водителей, географическими местоположениями и/или навигационными маршрутами. На основе демографических данных, связанных с водителем/водителями транспортного средства 102, географической области транспортного средства 102 и/или навигационного маршрута, по которому следует транспортное средство 102, преобразователь 120 режимов выбирает классификатор в базе 122 данных предпочтений для включения в профиль 118 режимов, передаваемый в транспортное средство 102. В таком сценарии, когда преобразователь 120 режимов имеет достаточно записей 116 событий режима, связанных с географической областью и/или навигационным маршрутом, по которому движется транспортное средство 102, для генерации потенциально подходящего классификатора, который пройдет классификационные тесты, преобразователь 120 режимов обновляет профиль 118 режимов для включения данного потенциально подходящего классификатора.
[0029] Фиг. 2 представляет собой структурную схему преобразователя 120 режимов на Фиг. 1. В проиллюстрированном примере преобразователь 120 режимов включает в себя информационный выравниватель 202, генератор 204 классификаторов, валидатор 206 классификаторов и генератор 208 профилей. В проиллюстрированном примере преобразователь 120 режимов коммуникативно связан с транспортным средством 102. Преобразователь 120 режимов принимает записи 116 событий режима от транспортного средства 102 и передает профили 118 режимов в транспортное средство 102.
[0030] Информационный выравниватель 202 принимает записи 116 событий режима. Информационный выравниватель 202 создает однородное множество данных путем выравнивания переменных с разными частотами измерений. Например, если датчик давления в шинах измеряет давление в шинах каждые пятнадцать секунд, а датчики скорости колес измеряют скорость колес каждую секунду, информационный выравниватель 202 может усреднять или иным образом манипулировать данными скорости колес для получения значения для каждого пятнадцатисекундного периода. Кроме того, информационный выравниватель 202 может выполнять другие функции предварительной обработки данных, такие как стандартизация форматов данных и фильтрация недопустимых значений, невозможных комбинаций данных и/или выведение недостающих значений и т.д. В некоторых примерах информационный выравниватель 202 разделяет данные динамики транспортного средства на разные группы на основе условий движения, таких как географическая область, навигационный маршрут, время суток или место назначения и т.д.
[0031] Генератор 204 классификаторов генерирует потенциально подходящие классификаторы, которые прогнозируют режим движения на основе подмножества данных динамики транспортного средства. В некоторых примерах генератор 204 классификаторов генерирует потенциально подходящие классификаторы с использованием конкретной группы данных динамики транспортного средства на основе интересующих условий движения. Генератор 204 классификаторов применяет методы планирования эксперимента (например, полный факторный план, дробный факторный план и т.д.) и методы машинного обучения (например, метод опорных векторов, метод нечетких с-средних, метод k-ближайших соседей, линейный дискриминантный анализ, метод горной кластеризации) для определения упрощенных карт разных множеств данных динамики транспортного средства. Например, если данные динамики транспортного средства включают в себя {скорость, состояние дороги, время суток}, с использованием методов планирования эксперимента упрощенные шаблонные карты для оценки могут представлять собой {скорость}, {состояние дороги}, {время суток}, {скорость, состояние дороги}, {скорость, время суток}, {состояние дороги, время суток} и {скорость, состояние дороги, время суток}. Методы машинного обучения используются для выбора тех упрощенных шаблонных карт, которые будут потенциально подходящими классификаторами. Например, некоторые из упрощенных шаблонных карт могут не группироваться таким образом, что входные данные (например, конкретные данные динамики транспортного средства упрощенной шаблонной карты) могут быть связаны с одним или более выходными данными (например, режимами движения). Таким образом, полная шаблонная карта данных динамики транспортного средства может быть сведена к одному или более потенциально подходящим классификаторам. Потенциально подходящие классификаторы включают в себя комбинацию переменных данных динамики транспортного средства, которые позволяют прогнозировать, какой режим движения предпочитает водитель. Например, один из потенциально подходящих классификаторов может определять, предпочитает ли водитель езду в нормальном режиме движения или комфортном режиме движения на основе переменной скорости и переменной состояния дороги при движении в конкретной географической области (например, интересующие условия движения).
[0032] Валидатор 206 классификаторов применяет тесты в отношении потенциально подходящих классификаторов, сгенерированных генератором 204 классификаторов. Тесты уравновешивают число переменных, используемых потенциально подходящим классификатором, с точностью прогнозирования. Меньшее число переменных, используемых потенциально подходящим классификатором, означает, что транспортное средство 102 может обрабатывать классификатор с меньшей производительностью. Однако большая точность прогнозирования означает, что рекомендация менеджера 112 режимов будет более точно соответствовать фактическим предпочтениям водителя, повышая степень удовлетворенности водителя. Валидатор 206 классификаторов сравнивает число переменных, используемых потенциально подходящими классификаторами, с пороговым числом переменных. Валидатор 206 классификаторов исключает потенциально подходящие классификаторы, которые не удовлетворяют (например, больше) пороговому числу переменных. В некоторых примерах пороговое число переменных составляет пять. Кроме того, валидатор 206 классификаторов применяет данные динамики транспортного средства в записях 116 событий режима, принятых информационным выравнивателем 202, в отношении потенциально подходящего классификатора. Валидатор 206 классификаторов сравнивает режим движения, спрогнозированный потенциально подходящим классификатором, с фактическим режимом движения в записях 116 событий режима. Валидатор 206 классификаторов исключает потенциально подходящие классификаторы, которые не удовлетворяют (например, меньше) пороговой точности (например, 70%, 80% и т.д.). В некоторых примерах при исключении всех потенциально подходящих классификаторов валидатор 206 классификаторов запрашивает больше потенциально подходящих классификаторов от генератора 204 классификаторов. Альтернативно в некоторых примерах валидатор 206 классификаторов информирует генератор 208 профилей о том, что потенциально подходящие классификаторы были исключены. Валидатор 206 классификаторов передает в генератор 208 профилей потенциально подходящий классификатор, который (a) удовлетворяет пороговому числу переменных и пороговой точности и (b) имеет наивысшую точность. В некоторых примерах, если потенциально подходящие классификаторы имеют аналогичную точность, валидатор 206 классификаторов передает в генератор 208 профилей потенциально подходящий классификатор, который (a) имеет меньшее число переменных и/или (b) имеет большее число переменных, которые наблюдаются непосредственно транспортным средством 102.
[0033] Генератор 208 профилей подготавливает и отправляет профиль 118 режимов в транспортное средство 102. Генератор 208 профилей извлекает профиль 118 режимов, связанный с водителем транспортного средства 102, из базы 124 данных профилей водителей. Профиль 118 режимов может включать в себя множество классификаторов, сгенерированных генератором 204 классификаторов. Каждый классификатор, включенный в профиль 118 режимов, связан с разными условиями движения, такими как географическая область, навигационный маршрут, время суток, день недели или место назначения и т.д. Профили 118 режимов обновляются классификатором, сгенерированным генератором 204 классификаторов. В некоторых примерах, когда генератор 204 классификаторов указывает, что потенциально подходящие классификаторы были исключены, генератор 208 профилей извлекает классификатор, сохраненный в базе 122 данных предпочтений, на основе интересующих условий движения и/или демографических характеристик водителя, связанного с профилем 118 режимов. Например, при движении водителя в новой географической области генератор 204 классификаторов и/или валидатор 206 классификаторов могут быть не способны генерировать потенциально подходящий классификатор для добавления в профиль 118 режимов. В таком примере генератор 208 профилей сравнивает манеру вождения, шаблоны использования, тип транспортного средства и установки транспортного средства (например, настройки силовой передачи, настройки подвески и т.д.) с другими профилями в базе 125 данных профилей водителей и выбирает классификатор из одного из других профилей водителей, которые сгенерированы для этой географической области. В некоторых примерах генератор 208 профилей сохраняет профиль 118 режимов в базе 124 данных профилей водителей.
[0034] Фиг. 3 иллюстрирует процессорную платформу 300, которая может быть использована для реализации преобразователя 120 режимов на Фиг. 1 и 2. В проиллюстрированном примере процессорная платформа 300 включает в себя процессор или контроллер 302, память 304, хранилище 306, сетевой интерфейс 308 и шину 310 передачи данных.
[0035] Процессор или контроллер 302 может представлять собой любое подходящее устройство обработки или набор устройств обработки, таких как, но не ограничиваясь: микропроцессор, платформа на основе микроконтроллера, подходящая интегральная схема или одна или более интегральных схем специального назначения (ASIC). В проиллюстрированном примере процессор или контроллер 302 выполнен так, чтобы включать в себя информационный выравниватель 202, генератор 204 классификаторов, валидатор 206 классификаторов и генератор 208 профилей.
[0036] Память 304 может представлять собой энергозависимую память (например, RAM, которая может включать в себя энергонезависимую RAM, магнитную RAM, сегнетоэлектрическую RAM и любые другие подходящие формы); энергонезависимую память (например, дисковую память, флэш-память, EPROM, EEPROM, энергонезависимую твердотельную память на основе мемристора и т.д.), неизменную память (например, EPROM) и постоянную память. В некоторых примерах память 304 включает в себя множество типов памяти, в частности, энергозависимую память и энергонезависимую память. Хранилище 306 может включать в себя любое устройство хранения большой емкости, например, жесткий диск и/или твердотельный накопитель. Хранилище 306 может быть локальным по отношению к вычислительной платформе 300 и/или удаленным от вычислительной платформы 300. В некоторых примерах база 122 данных предпочтений и/или база 124 данных профилей водителей сохранены в хранилище 306.
[0037] Память 304 и хранилище 306 представляют собой машиночитаемый носитель, на котором могут быть сохранены один или более наборов инструкций, таких как программное обеспечение для выполнения способов в соответствии с настоящим изобретением. Инструкции могут воплощать один или более способов или логическую схему, которые описаны в настоящем документе. В конкретном варианте осуществления инструкции могут находиться полностью или по меньшей мере частично в любом одном или более из памяти 304, машиночитаемого носителя и/или в процессоре 302 при выполнении инструкций.
[0038] Выражения « энергонезависимый машиночитаемый носитель» и «машиночитаемый носитель» следует понимать как включающие в себя один носитель или множество носителей, например, централизованная или распределенная база данных, и/или связанные кэши и серверы, которые хранят один или более наборов инструкций. Выражения «энергонезависимый машиночитаемый носитель» и «машиночитаемый носитель» также включают в себя любой материальный носитель, который выполнен с возможностью хранения, кодирования или переноса набора инструкций для выполнения процессором, или который побуждает систему к выполнению одного или более способов или операций, раскрытых в настоящем документе. В данном контексте выражение «машиночитаемый носитель» четко определено как включающее в себя любой тип машиночитаемого устройства хранения и/или накопителя на дисках и исключающее распространяющие сигналы.
[0039] Сетевой интерфейс 308 обеспечивает взаимодействие транспортного средства 102 с вычислительной платформой 300, представляя собой сетевое соединение. Сетевой интерфейс 308 включает в себя устройство связи, например, модем или плату сетевого интерфейса, для обеспечения обмена данных с внешними вычислительными системами (например, бортовой вычислительной платформой 404 на Фиг. 4) посредством сетевого соединения (например, Ethernet соединение, цифровая абонентская линия (DSL), телефонная линия, коаксиальный кабель, система сотовой телефонной связи, Bluetooth соединение и т.д.). Сетевой интерфейс 308 может использовать множество сетевых протоколов, доступных сейчас или разработанных в будущем, включая, но не ограничиваясь, сетевые протоколы на основе TCP/IP.
[0040] Шина 310 передачи данных коммуникативно связывает процессор 302, память 304, хранилище 306 и сетевой интерфейс 308. Шина 310 передачи данных может быть реализована в соответствии с одним или более стандартами интерфейса, такими как Ethernet интерфейс, USB интерфейс, PCI express интерфейс и/или Serial ATA интерфейс и т.д.
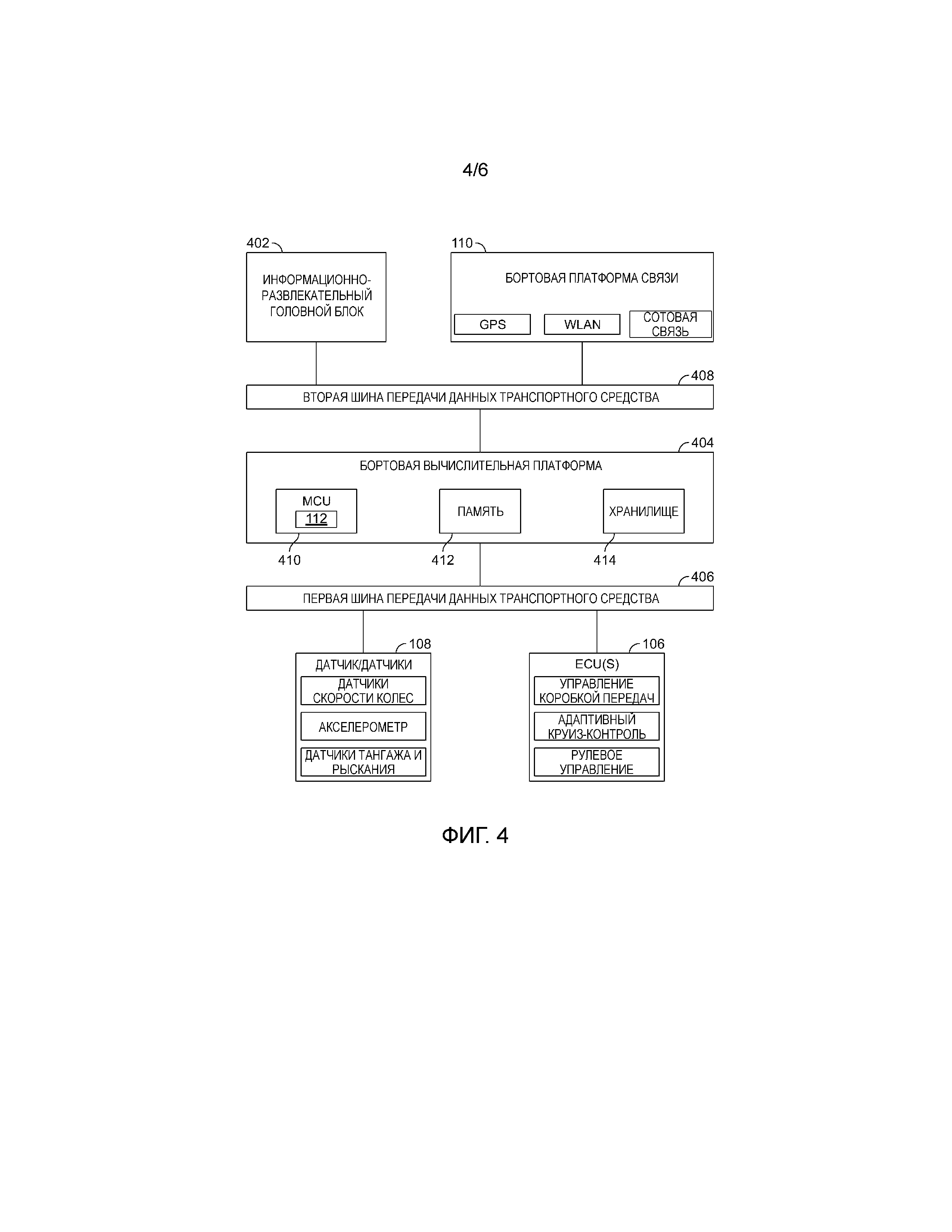
[0041] Фиг. 4 представляет собой структурную схему электронных компонентов 400 транспортного средства 102 на Фиг. 1. Электронные компоненты 400 включают в себя примерную бортовую платформу 110 связи, примерный информационно-развлекательный головной блок 402, бортовую вычислительную платформу 404, примерные датчики 108, примерные ECU 106, первую шину 406 передачи данных транспортного средства и вторую шину 408 передачи данных транспортного средства.
[0042] Бортовая платформа 110 связи включает в себя проводные или беспроводные сетевые интерфейсы для обеспечения связи с внешними сетями, например, с внешней сетью 114 на Фиг. 1. Бортовая платформа 110 связи также включает в себя аппаратное обеспечение (например, процессоры, память хранилище, антенну и т.д.) и программное обеспечение для управления проводными или беспроводными сетевыми интерфейсами. В проиллюстрированном примере бортовая платформа 110 связи включает в себя модем сотовой связи, GPS-приемник 112 и модуль беспроводной локальной сети (WLAN). Модем сотовой связи включает в себя контроллеры для сетей на основе стандартов (например, глобальной системы мобильной связи («GSM»), универсальной мобильной телекоммуникационной системы («UMTS»), долгосрочного развития («LTE»), множественного доступа с кодовым разделением («CDMA»), WiMAX («IEEE 802.16m»); и беспроводного гигабита («IEEE 802.11ad»)) и т.д. Модуль беспроводной локальной сети включает в себя контроллеры для беспроводных сетей, например, Wi-FI® контроллер (включая IEEE 802.11 a/b/g/n/ac или другие), Bluetooth® контроллер (на основе Bluetooth® Core Specification, поддерживаемой Bluetooth Special Interest Group), и/или ZigBee® контроллер («IEEE 802.15.4»), и/или контроллер коммуникации ближнего поля («NFC») и т.д. В некоторых примерах бортовая платформа 110 связи включает в себя модуль специализированной связи на коротких расстояниях (DSRC). Модуль DSRC включает в себя антенну/антенны, радио и программное обеспечение для передачи сообщений и установления прямых соединений между транспортными средствами и узлами инфраструктуры. DSRC представляет собой протокол или систему беспроводной связи, предназначенную, главным образом, для транспорта, работающую в диапазоне 5,9 ГГц. Более подробная информация о сети DSRC и о взаимодействии сети с аппаратным обеспечением и программным обеспечением транспортного средства доступна в докладе по Спецификации требований к системе (SyRS) Министерства транспорта США, июнь 2011 г. (доступен по ссылке http://www.its.dot.gov/meetings/pdf/CoreSystem_SE_SyRS_RevA%20(2011-06-13).pdf), который включен сюда путем ссылки во всей своей полноте вместе со всеми документами, упомянутыми на страницах 11-14 доклада SyRS. Системы DSRC могут быть установлены на транспортных средствах и на объектах инфраструктуры вдоль обочин. Система DSRC, включающая информацию от объектов инфраструктуры, известна как «придорожная» система. Бортовая платформа 110 связи также может включать в себя проводной или беспроводной интерфейс для обеспечения прямой связи с электронным устройством (таким как, смартфон, планшетный компьютер, переносной компьютер и т.д.).
[0043] Информационно-развлекательный головной блок 402 обеспечивает взаимодействие между транспортным средством 102 и пользователями (например, водителями, пассажирами и т.д.). Информационно-развлекательный головной блок 402 включает в себя цифровые и/или аналоговые интерфейсы (например, устройства ввода и устройства вывода) для приема входных данных от пользователя/пользователей и отображения информации. Устройства ввода могут включать в себя, например, ручку управления, приборную панель, цифровую камеру для получения изображений и/или визуального распознавания команд, сенсорный экран, устройство ввода аудиосигнала (например, встроенный микрофон), кнопки или сенсорную панель. Устройства вывода могут включать в себя устройства вывода на приборной панели (например, циферблаты, световые устройства), исполнительные устройства, панель приборной доски, проекционный дисплей, дисплей на центральной консоли (например, жидкокристаллический дисплей («LCD»), дисплей на органических светодиодах («OLED»), плоскопанельный дисплей, твердотельный дисплей или проекционный дисплей) и/или динамики. Когда менеджер 112 режимов рекомендует режим движения на основе профиля 118 режимов, менеджер 112 режимов представляет рекомендацию посредством информационно-развлекательного головного блока 402.
[0044] Бортовая вычислительная платформа 404 включает в себя процессор или контроллер 410, память 412 и хранилище 414. В проиллюстрированном примере бортовая вычислительная платформа 404 выполнена так, чтобы включать в себя менеджер 112 режимов. Альтернативно в некоторых примерах менеджер 112 режимов может быть встроен в ECU 106 с его собственным процессором и памятью. Процессор или контроллер 410 может представлять собой любое подходящее устройство обработки или набор устройств обработки, таких как, но не ограничиваясь: микропроцессор, платформа на основе микроконтроллера, подходящая интегральная схема, одна или более программируемых пользователем вентильных матриц («FPGA») или одна или более интегральных схем специального назначения («ASIC»). Память 412 может представлять собой энергозависимую память (например, RAM, которая может включать в себя энергонезависимую RAM, магнитную RAM, сегнетоэлектрическую RAM и любые другие подходящие формы); энергонезависимую память (например, дисковую память, флэш-память, EPROM, EEPROM, энергонезависимую твердотельную память на основе мемристора и т.д.), неизменную память (например, EPROM), и постоянную память. В некоторых примерах, память 412 включает в себя множество типов памяти, в частности, энергозависимую память и энергонезависимую память. Хранилище 414 может включать в себя любое устройство хранения большой емкости, например, жесткий диск и/или твердотельный накопитель.
[0045] Память 412 и хранилище 414 представляют собой машиночитаемый носитель, на котором могут быть сохранены один или более наборов инструкций, таких как программное обеспечение для выполнения способов в соответствии с настоящим изобретением. Инструкции могут воплощать один или более способов или логическую схему, которые описаны в настоящем документе. В конкретном варианте осуществления инструкции могут находиться полностью или по меньшей мере частично в любом одном или более из памяти 412, машиночитаемого носителя и/или в процессоре 410 при выполнении инструкций.
[0046] ECU 106 отслеживают и управляют системами транспортного средства 106. ECU 106 связываются и обмениваются информацией по первой шине 406 передачи данных транспортного средства. Кроме того, ECU 106 могут сообщать характеристики (такие как состояние ECU 106, показания датчиков, состояние управления, коды ошибок и диагностические коды и т.д.) другим ECU 106 и/или принимать запросы от других ECU 106. Некоторые транспортные средства 102 могут иметь семьдесят или более ECU 106, расположенных в различных местах вокруг транспортного средства 102, коммуникативно связанных первой шиной 406 передачи данных транспортного средства. ECU 106 представляют собой отдельные наборы электроники, которые включают в себя собственную схему/схемы (например, интегральные схемы, микропроцессоры, память хранилище, и т.д.) и микропрограммное обеспечение, датчики, исполнительные устройства, и/или установочное оборудование. В проиллюстрированном примере ECU 106 включают в себя контроль тяги, адаптивный круиз-контроль и управление торможением. ECU 106 также могут включать в себя управление двигателем, управление коробкой передач и/или рулевое управление и т.д. Если подключенное транспортное средство является автономным или полуавтономным, ECU 106 также могут включать в себя адаптивный круиз-контроль.
[0047] Первая шина 406 передачи данных транспортного средства коммуникативно связывает датчики 406, ECU 106, бортовую вычислительную платформу 404 и другие устройства, подключенные к первой шине 406 передачи данных транспортного средства. В некоторых примерах первая шина 406 передачи данных транспортного средства реализована в соответствии с протоколом шины локальной сети контроллеров («CAN»), который определен Международной организацией по стандартизации (ISO) 11898-1. Альтернативно в некоторых примерах первая шина 406 передачи данных транспортного средства может быть реализована в соответствии с другим протоколом шины, например, шина передачи данных мультимедийных систем («MOST») или шина CAN с изменяемой скоростью передачи данных (CAN-FD) (определена ISO 11898-7). Вторая шина 408 передачи данных транспортного средства коммуникативно связывает бортовую платформу 108 связи, информационно-развлекательный головной блок 402 и бортовую вычислительную платформу 404. Вторая шина 408 передачи данных транспортного средства может представлять собой шину MOST, шину CAN-FD или шину Ethernet. В некоторых примерах бортовая вычислительная платформа 404 коммуникативно изолирует первую шину 406 передачи данных транспортного средства и вторую шину 408 передачи данных транспортного средства (например, посредством межсетевых экранов, брокеров сообщений и т.д.). Альтернативно в некоторых примерах первая шина 406 передачи данных транспортного средства и вторая шина 408 передачи данных транспортного средства представляют собой одну шину передачи данных.
[0048] Фиг. 5 представляет собой блок-схему последовательности операций примерного способа генерации профиля 118 режимов для пользователя (например, водителя транспортного средства 102 на Фиг. 1), который может быть реализован вычислительной платформой 300 на Фиг. 3. Первоначально на этапе 502 информационный выравниватель 202 принимает информацию о режиме движения (например, посредством записей 116 событий режима) от транспортного средства 102. В некоторых примерах информационный выравниватель 202 принимает записи 116 событий режима от транспортного средства 102 отдельными пакетами. На этапе 504 информационный выравниватель 202 выравнивает данные динамики транспортного средства в записях 116 событий режима, принятых на этапе 502. Выравнивание данных динамики транспортного средства облегчает сравнение и анализ данных динамики транспортного средства для определения зависимостей между данными динамики транспортного средства и предпочтениями водителя в отношении режима движения.
[0049] На этапе 506 генератор 204 классификаторов генерирует полную шаблонную карту на основе выровненных данных динамики транспортного средства. Полная шаблонная карта связывает (например, в качестве входных данных) выровненные данные динамики транспортного средства с изменениями режима движения (например, в качестве выходных данных) и включает независимые и зависимые переменные в выровненных данных динамики транспортного средства. То есть полная шаблонная карта характеризует предпочтения водителя в отношении режима движения и включает в себя переменные в выровненных данных динамики транспортного средства независимо от того, какая конкретная переменная участвует в предпочтениях водителя. На этапе 508 генератор 204 классификаторов сводит полную шаблонную карту к потенциально подходящему классификатору. Потенциально подходящий классификатор связывает подмножество данных полной шаблонной карты с прогнозом изменения режима движения. Генератор 204 классификаторов применяет методы планирования эксперимента (например, полный факторный план, дробный факторный план и т.д.) и методы машинного обучения (например, методы опорных векторов, метод нечетких с-средних, метод k-ближайших соседей, линейный дискриминантный анализ, метод горной кластеризации) для определения потенциально подходящих классификаторов, которые включают в себя разные комбинации данных динамики транспортного средства.
[0050] На этапе 510 валидатор 206 классификаторов определяет, удовлетворяет ли потенциально подходящий классификатор, сгенерированный на этапе 508, пороговому значению атрибута (например, пороговому числу переменных). Потенциально подходящий классификатор удовлетворяет пороговому значению атрибута, когда число входных переменных потенциально подходящего классификатора меньше или равно пороговому значению атрибута. В некоторых примерах пороговое значение атрибута составляет пять. Пороговое значение атрибута выбрано для уравновешивания прогностической способности потенциально подходящих классификаторов с вычислительной нагрузкой для генерации прогноза. Если потенциально подходящий классификатор не удовлетворяет пороговому значению атрибута, генератор 204 классификаторов генерирует другой потенциально подходящий классификатор (на этапе 508). В противном случае, если потенциально подходящий классификатор удовлетворяет пороговому значению атрибута, на этапе 512 валидатор 206 классификаторов, определяет, удовлетворяет ли потенциально подходящий классификатор классификационному пороговому значению (например, пороговой точности). Потенциально подходящий классификатор удовлетворяет классификационному пороговому значению, когда процент правильных классификаций больше или равен классификационному пороговому значению. В некоторых примерах классификационное пороговое значение составляет семьдесят процентов. Для вычисления процента правильных классификаций валидатор 206 классификаторов применяет данные динамики транспортного средства из записей 116 событий режима в отношении потенциально подходящего классификатора и сравнивает выходные данные потенциально подходящего классификатора с изменением режима движения в записях 116 событий режима. Если потенциально подходящий классификатор не удовлетворяет классификационному пороговому значению, генератор 204 классификаторов генерирует другой потенциально подходящий классификатор (на этапе 508).
[0051] В противном случае, если потенциально подходящий классификатор удовлетворяет классификационному пороговому значению, на этапе 514 генератор 208 профилей генерирует профиль 118 транспортного средства. Профиль 118 транспортного средства может включать в себя потенциально подходящие классификаторы, связанные с разными условиями движения, которые используются транспортным средством 102 в зависимости от текущих условий движения транспортного средства 102. На этапе 516 генератор 208 профилей передает профиль 118 транспортного средства в транспортное средство 102.
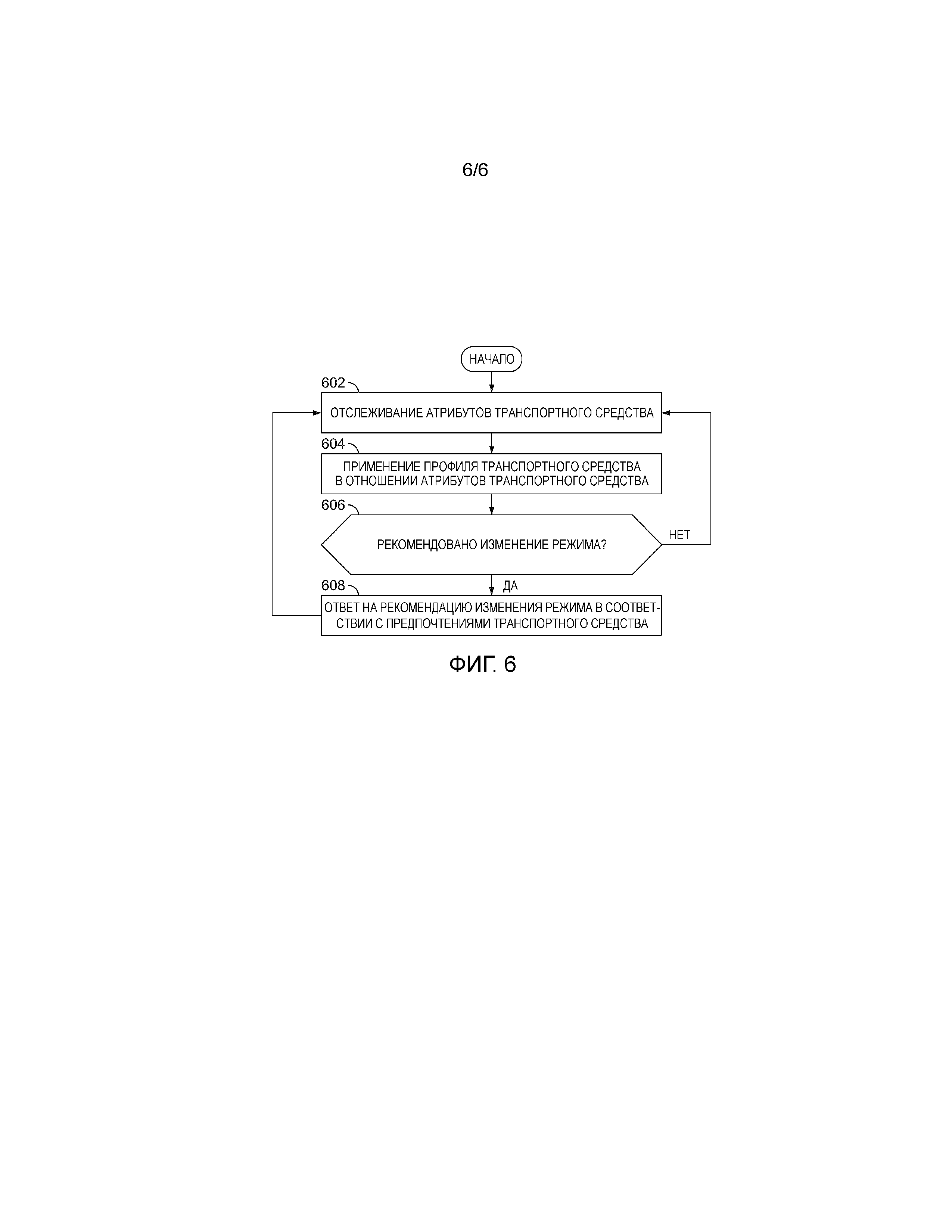
[0052] Фиг. 6 представляет собой блок-схему последовательности операций примерного способа прогнозирования режимов движения транспортного средства на основе профиля 118 режимов, который может быть реализован электронными компонентами 400 на Фиг. 4. Первоначально на этапе 602 менеджер 112 режимов отслеживает атрибуты транспортного средства (например, данные динамики транспортного средства). В некоторых примерах менеджер 112 режимов отслеживает атрибуты транспортного средства по первой шине 406 передачи данных транспортного средства. На этапе 604 менеджер 112 режимов применяет атрибуты транспортного средства в отношении одного из классификаторов в профиле 118 транспортного средства. В некоторых примерах менеджер 112 режимов выбирает один из классификаторов в профиле 118 транспортного средства на основе текущих условий движения транспортного средства 102. На этапе 606 менеджер 112 режимов определяет, прогнозирует ли классификатор изменение режима движения на основе атрибутов транспортного средства. Если классификатор не прогнозирует изменение режима движения, менеджер 112 режимов продолжает отслеживать атрибуты транспортного средства (на этапе 602). В противном случае, если классификатор прогнозирует изменение режима движения, на этапе 608 менеджер 112 режимов отвечает на прогноз режима движения в соответствии с предпочтениями транспортного средства. В некоторых примерах, если транспортное средство является неавтономным, менеджер 112 режимов отображает посредством информационно-развлекательного головного блока 402 прогноз в качестве рекомендации водителю транспортного средства 102. В некоторых примерах, если транспортное средство 102 является автономным или полуавтономным, менеджер 112 режимов посредством одного или более ECU 106 автоматически изменяет режим движения транспортного средства 102 (например, без участия водителя). Далее менеджер 112 режимов продолжает отслеживать атрибуты транспортного средства (на этапе 602).
[0053] Блок-схема последовательности операций на Фиг. 5 представляет собой способ, который может быть реализован машиночитаемыми инструкциями, содержащими одну или более программ, которые при выполнении процессором (например, процессором 302 на Фиг. 3) побуждают субъект 104, осуществляющий поддержку транспортного средства, к реализации преобразователя 120 режимов на Фиг. 1 и 2. Блок-схема на Фиг. 6 представляет собой способ, который может быть реализован машиночитаемыми инструкциями, содержащими одну или более программ, которые при выполнении процессором (например, процессором 410 на Фиг. 4) побуждают транспортное средство 102 к реализации менеджера 112 режимов на Фиг. 1. Кроме того, хотя примерная программа/программы описана/описаны со ссылкой на блок-схемы, проиллюстрированные на Фиг. 5 и 6, альтернативно может быть использовано множество других способов реализации примерного преобразователя 120 режимов и/или менеджера 112 режимов. Например, порядок выполнения этапов может быть изменен, и/или некоторые из описанных этапов могут быть изменены, опущены или объединены.
[0054] В настоящей заявке использование разделительных союзов предназначено для включения соединительных союзов. Использование определенных или неопределенных артиклей не предназначено для указания количества элементов. В частности, ссылка на «объект» предназначена для обозначения одного из возможного множества таких объектов. Кроме того, союз «или» может быть использован для передачи одновременно присутствующих признаков, а не взаимоисключающих альтернатив. Другими словами, союз «или» следует понимать как подразумевающий значение «и/или». Выражения «включает в себя», «включающий в себя» и «включают в себя» охватывают и имеют такой же объем и смысл, что и выражения «содержит», «содержащий» и «содержат» соответственно.
[0055] Вышеописанные варианты осуществления и, в частности, любые «предпочтительные» варианты осуществления представляют собой возможные примеры реализаций и изложены только для четкого понимания принципов изобретения. Множество изменений и модификаций может быть выполнено в вышеописанном варианте/вариантах осуществления по существу без отклонения от замысла и принципов описанных в настоящем документе технологий. Все такие модификации должны быть включены в пределы объема охраны настоящего изобретения и защищены следующей далее формулой изобретения.
Реферат
Раскрыты системы и способы планирования режимов транспортного средства с использованием изученных предпочтений пользователя. Способ включает в себя этап, на котором отслеживают данные транспортного средства, когда транспортное средство меняет первый режим во второй режим. Способ также включает в себя этап, на котором анализируют данные транспортного средства для идентификации предпочтения для второго режима в условиях движения. Способ включает в себя этапы, на которых генерируют рекомендацию о том, следует ли переключаться на второй режим при следовании по маршруту, на основе данных транспортного средства и условий движения, и представляют рекомендацию водителю. Улучшается возможность управления транспортным средством при использовании нескольких режимов движения. 4 н. и 12 з.п. ф-лы, 6 ил.
Комментарии