Моторизованный самокат - RU2641401C1
Код документа: RU2641401C1
Чертежи

Описание
Предпосылки создания изобретения
Настоящее изобретение касается моторизованного самоката. В частности, оно применяется для проведения отдыха на свежем воздухе или для передвижения на средние и длинные расстояния, в частности в городе, например, в рамках интермодальных перевозок.
Под интермодальными перевозками подразумевают комбинирование различных видов передвижения, таких как ходьба, велосипед, самокат, метро, автобус и т.д., используемых для передвижения по единому маршруту.
Известны моторизованные самокаты, мощность двигателя которых управляется устройством управления, приводимым в действие пользователем.
В частности, такой моторизованный самокат предлагался патентом US 2002/170 763, который описывает самокат, имеющий раму, переднее колесо и заднее колесо, двигатель, выполненный с возможностью приведения во вращение заднего колеса, и устройство управления двигателем.
Приводя в действие устройство управления, пользователь выбирает одну из предварительно заданных мощностей двигателя, и, следовательно, скорость самоката.
Существуют также самокаты, устройство управления которых имеет пусковой рычажок, расположенный, например, на руле самоката.
Воздействуя на пусковой рычажок, например, поворачивая его вокруг оси руля, пользователь изменяет мощность двигателя подобно тому, как это делается в случае воздействия на устройство управления мопеда.
Тем не менее, такие изделия не удовлетворяют пользователей, которые желают получать помощь, позволяющую уменьшить мускульные усилия для того, чтобы, например, можно было преодолеть расстояния, большие, чем те, которые можно преодолеть на обычном самокате, сохраняя при этом возможность использовать самокат в традиционной манере, то есть сохранять, например, одну ногу на раме самоката, тогда как вторая нога отталкивается от земли. Кроме того, такие изделия не позволяют автоматически приспособить мощность двигателя к усилиям, выполняемым пользователем.
Цель и краткое содержание изобретения
Настоящее изобретение имеет целью решить, среди всего прочего, проблему вышеописанных недоработок существующих моторизованных самокатов, предложив моторизованный самокат, мощность двигателя которого управляется усилиями, прилагаемыми пользователем.
Эта цель достижима, так как данное изобретение касается самоката, устройство управления которого содержит:
- средства обнаружения ускорения движения для обнаружения фазы ускорения движения самоката;
- средства обнаружения замедления движения для обнаружения фазы замедления движения самоката;
- устройство управления, выполненное с возможностью приведения в действие двигателя, когда средствами обнаружения замедления движения обнаруживается фаза замедления скорости движения, имеющая длительность, по меньшей мере, равную предусмотренной первой пороговой величине, после того, как средствами обнаружения ускорения движения обнаруживается фаза ускорения скорости движения.
Таким образом, это устройство выполнено так, чтобы двигатель приводился в действие в зависимости от усилий, прилагаемых пользователем. Под ускорением и замедлением скорости движения самоката подразумевают фазу, в течение которой скорость движения самоката соответственно увеличивается или замедляется.
Точнее, устройство управления выполнено с возможностью приводить в действие двигатель после того, как пользователем было выполнено какое-то мускульное усилие.
Под мускульным усилием подразумевают, в качестве неограничительного примера, толчкообразное движение, приданное пользователем самокату, позволяющее привести или поддержать самокат в движении, при этом пользователь оказывает одной своей ногой давление на землю, в то время как вторая его нога сохраняется на раме самоката, а точнее, на опорной площадке, расположенной между передним и задним колесами.
Факт обеспечения приведения в действие двигателя во время обнаружения фазы замедления скорости движения, следующей за обнаружением фазы ускорения скорости движения, позволяет не приводить в действие двигатель, когда пользователь прилагает толчкообразное усилие на самокат, что может, кроме всего прочего, внести изменение в традиционное ручное использование самоката пользователем.
Стало быть, устройство управления, согласно изобретению, может отключаться таким образом, что моторизованный самокат не лишает потребителя возможности приводить или поддерживать самокат в движении посредством традиционных мускульных усилий.
Более того, факт обеспечения приведения в действие двигателя при обнаружении достаточно длинной фазы замедления скорости движения позволяет не приводить в действие двигатель, когда пользователь совершает новое толчкообразное движение практически сразу же после ускорения скорости движения, обнаруженной средствами обнаружения ускорения.
Другими словами, устройство управления выполнено так, чтобы, когда пользователь совершает различные последовательные толчкообразные движения в установленном порядке, например для начала движения самоката после его остановки, двигатель не приводился в действие, чтобы не мешать усилиям, совершаемым пользователем.
Под последовательными толчкообразными движениями подразумевают движения, которые совершаются пользователем, независимо от того, истек или не истек промежуток времени, превышающий первую предусмотренную пороговую величину между концом фазы ускорения скорости движения, обнаруженной средствами обнаружения ускорения по завершении первого движения, и началом фазы ускорения скорости движения, также обнаруженной средствами обнаружения ускорения по завершении следующего движения. Другими словами, два последовательных толчкообразных движения должны находиться в промежутке времени, который не должен превышать первую предусмотренную пороговую величину.
Под окончанием фазы ускорения скорости движения подразумевают период времени, который предшествует периоду времени, когда скорость самоката начинает замедляться, например, от трения самоката о дорогу, по которой он движется.
В случае, когда пользователь не совершает новых действий на самокате, самокат начинает фазу замедления скорости движения, обнаруживаемую средствами обнаружения замедления движения; когда средства обнаружения замедления движения обнаруживают фазу замедления скорости движения, длительность которой превышает предусмотренную первую пороговую величину, двигатель приводится в действие для того, чтобы устранить замедление скорости самоката. Говоря другими словами, устройство управления двигателем выполнено с возможностью приведения в действие двигателя, чтобы замещать мускульные усилия, прилагаемые пользователем.
Данное изобретение упоминается ниже в серии различных вариантов реализации, которые могут рассматриваться сами по себе или в комбинации с одним или несколькими предшествующими.
Преимущественно, устройство управления выполнено с возможностью приведения в действие двигателя после обнаружения упомянутой фазы замедления скорости движения таким образом, чтобы скорость движения самоката поддерживалась на заданной величине.
В таком варианте устройство управления выполнено с возможностью приведения в действие двигателя с целью устранения естественного замедления скорости движения самоката, характерного, например, для сил трения.
Преимущественно, заданная скорость является следствием начальной скорости. Под начальной скоростью подразумевают скорость самоката в момент приведения в действие двигателя.
Начальная скорость может, таким образом, соответствовать скорости самоката в конце продолжительности фазы замедления скорости движения, обнаруженной средствами обнаружения замедления движения; в качестве альтернативы она может соответствовать скорости, которая ниже скорости самоката в конце продолжительности фазы замедления скорости движения, обнаруженной средствами обнаружения замедления движения, при условии, что двигатель приводится в действие не одновременно с окончанием продолжительности фазы замедления скорости движения, а немного позже, и при условии, что скорость самоката при этом продолжает уменьшаться.
Следовательно, устройство управления выполнено так, что обеспечение движения самоката является следствием усилий, прилагаемых пользователем, которые позволяют достигать начальной скорости движения. Таким образом, становится понятно, что устройство управления выполнено таким образом, что обеспечение движения, реализуемое включением двигателя, выполняется так, чтобы не застать потребителя врасплох мощностью двигателя, которая не будет зависеть от скорости самоката, обнаруженной средствами обнаружения замедления движения по окончании фазы замедления скорости движения, продолжительность которой превышает предусмотренную первую пороговую величину. Предпочтительно, заданная скорость будет равна скорости самоката в момент приведения в действие двигателя.
В таком варианте обеспечение движения, реализуемое приведением в действие двигателя, происходит очень плавно и не влечет за собой внезапного и резкого ускорения или замедления, которые могли бы застать потребителя врасплох, то есть заставить его потерять равновесие.
Предпочтительно, устройство управления выполнено с возможностью определения скорости в конце упомянутой фазы замедления скорости движения и приведения в действие двигателя после обнаружения упомянутой фазы замедления скорости движения, для того, чтобы скорость самоката превышала скорость, определенную в конце упомянутой фазы замедления скорости движения.
При такой конструкции обеспечение движения, реализуемое приведением в действие двигателя, позволяет уменьшить, то есть устранить, воздействие замедления движения в промежутке времени, который практически равен первой предусмотренной пороговой величине фазы замедления скорости движения, обнаруженной средствами обнаружения замедления движения. Другими словами, устройство управления выполнено с возможностью приведения в действие двигателя для того, чтобы скорость моторизованного самоката приблизилась к желаемой скорости, которую пользователь хотел бы придать самокату в результате одного или нескольких толчкообразных движений, которые он совершил.
Предпочтительно, устройство управления выполнено с возможностью приведения в действие двигателя в течение определенного отрезка времени.
При таком конструктивном варианте двигатель не приводится в действие постоянно, позволяя, таким образом, чередовать фазы ручного продвижения, например, посредством действий, выполняемых пользователем в традиционной манере, и фазы продвижения, реализуемые приведением в действие двигателя. Кроме того, при таком конструктивном варианте возможность приведения в движение самоката, таким образом комбинирующего различные варианты, возрастает.
Предпочтительно, устройство управления выполнено с возможностью отключения двигателя, когда обнаруживается новая фаза ускорения скорости движения, в то время, когда двигатель приведен в действие.
При таком конструктивном варианте использование самоката в традиционной манере посредством толчкообразных движений, осуществляемых пользователем, допускается при приведенном в действие двигателе.
Преимущественно, устройство управления выполнено с возможностью нового приведения в действие двигателя, когда новая фаза замедления скорости движения, имеющая длительность, по меньшей мере, равную первой предусмотренной пороговой величине, обнаружена средствами обнаружения замедления движения после новой фазы ускорения скорости движения.
Таким образом, фазы обеспечения движения посредством приведения в действие двигателя и ручного продвижения при помощи толчкообразных движений, совершаемых пользователем, могут чередоваться плавно и предсказуемо, соединяя преимущества обеспечения движения со спортом, характерным для передвижения на самокате. Следовательно, пользователь может увеличивать предписанную скорость путем совершения нового толчкообразного движения.
Предпочтительно, самокат имеет, кроме того, устройство определения скорости самоката, а устройство управления выполнено с возможностью отключения двигателя, когда обнаруживается позитивное изменение скорости самоката, которое превышает вторую предусмотренную пороговую величину.
Таким образом, когда скорость самоката становится больше заданной скорости самоката более чем на вторую предусмотренную пороговую величину, или, иначе говоря, когда скорость самоката превышает вторую предусмотренную пороговую величину по отношению к предусмотренной скорости, приведение в действие двигателя прерывается.
При таком конструктивном варианте согласно изобретению безопасность пользователя, так же, как и людей, находящихся вблизи самоката, не нарушается, при этом приведение в движение самоката с помощью двигателя может не являться причиной увеличения скорости, которое может быть вызвано, в качестве неограничительного примера, уклоном дороги, по которой перемещается самокат, новым толчкообразным движением, выполненным пользователем.
Предпочтительно, устройство управления выполнено с возможностью прерывания работы двигателя, когда позитивное изменение скорости самоката превышает вторую предусмотренную пороговую величину в течение периода, превосходящего третью предусмотренную пороговую величину.
При таком конструктивном варианте приведение в действие двигателя не прерывается при возникновении ускорения, превышающего вторую предусмотренную пороговую величину, в течение периода, который меньше третей предусмотренной пороговой величины. Другими словами, приведение в движение самоката не прерывается при резком, но коротком ускорении, при этом такое случайное ускорение может произойти, например, из-за неровностей дороги или при наезде на бордюр тротуара. Под случайным ускорением подразумевают любое ускорение, отличное от ускорения, вызванного сознательным усилием пользователя, приложенным к самокату.
Преимущественно, устройство управления выполнено с возможностью не приводить в действие двигатель, когда скорость самоката превышает четвертую предусмотренную пороговую величину.
Другими словами, максимальная скорость, которую может достичь самокат, является ниже четвертой предусмотренной пороговой величины.
При таком конструктивном варианте самокат при приведении в действие двигателя не может развивать скорость, превышающую четвертую предусмотренную пороговую величину, чтобы не нарушить безопасность пользователя и других потребителей, находящихся в пространстве, в котором передвигается самокат. Эта конструкция позволяет, в частности, соответствовать правилам, разрешенным в общественном месте, например, когда самокат движется по тротуару.
Преимущественно, устройство управления выполнено с возможностью не приводить в действие двигатель, когда скорость самоката ниже пятой предусмотренной пороговй скорости.
При таком конструктивном варианте двигатель не приводится в действие в нежелательный момент, когда, например, пользователь идет с ним рядом.
Предпочтительно, самокат имеет, кроме всего прочего, тормозное устройство, и устройство управления выполнено с возможностью прерывать приведение в действие двигателя, когда тормозное устройство приведено в действие.
Таким образом, приведение в действие двигателя может быть прервано простым и понятным способом, для того, чтобы дать пользователю возможность быстро и эффективно уменьшить скорость самоката и, таким образом, приспособиться к встреченным препятствиям.
Краткое описание чертежей
Другие преимущества и характеристики будут более полно и отчетливо видны из описания предпочтительного варианта реализации, приведенного ниже в качестве неограничительного примера и представленного на прилагаемых рисунках, на которых:
Фиг. 1А и Фиг 1В - схематичное представление примера самоката в соответствии с изобретением; и
- Фиг. 2А, 2В и 2С - схематичное представление различных примеров изменений во времени скорости самоката согласно изобретению.
Подробное описание изобретения
На фиг. 1А и фиг. 1В, представлен пример, на котором самокат 10 согласно изобретению традиционно имеет раму 12, переднее колесо 20, заднее колесо 22.
Рама 12 самоката 10 имеет платформу 14, расположенную между передним 20 и задним 22 колесами и рулевую колонку 16, один конец которой соединен с передним колесом 20; рулевая колонка 16 имеет руль 18, расположенный на ее противоположном конце.
Кроме того, самокат 10 согласно настоящему изобретению имеет двигатель 24, выполненный с возможностью приведения во вращение переднего колеса 20, и устройство управления 26, выполненное с возможностью управления двигателем 24.
В качестве неограниченного примера двигатель 24 самоката 10 представляет собой электрический двигатель, установленный на ступицу переднего колеса 20, при этом самокат 10 содержит, кроме всего прочего, батарею 28, расположенную между рулевой колонкой 16 и платформой 14.
Можно, конечно, конструктивно придумать, не выходя за рамки настоящего изобретения, совершенно другой тип двигателя, такого как двигатель внутреннего сгорания, выполненный с возможностью приведения во вращение одного из двух колес - переднего 20 или заднего 22.
Самокат 10 имеет, кроме того, тормозное устройство 30, которое в качестве неограничительного примера можно приводить в действие от руля 18 самоката 10, при этом тормозное устройство может быть выполнено с возможностью противостояния вращательному движению переднего колеса 20.
Самокат 10 имеет также устройство определения скорости самоката, при этом в качестве неограничительного примера устройство определения скорости представляет собой датчик 11, установленный на заднем колесе 22 и выполненный с возможностью получения через регулярные интервалы, разделенные периодом времени t 0, для определения скорости самоката 10. Речь также может идти о датчике скорости вращения одного из двух колес самоката.
С другой стороны, устройство управления 26 имеет, в частности, средства обнаружения замедления движения 26b, выполненные с возможностью обнаружения соответственно фазы ускорения движения и фазы замедления скорости движения самоката 10.
Устройство управления 26 выполнено с возможностью приведения в действие двигателя 24 и, таким образом, приведения во вращение переднего колеса 20, если определенные условия, о которых речь будет идти более подробно в описании фиг. 2А, 2В и 2С, будут выполнены.
Фиг 2А, 2В и 2С схематично представляют примеры изменений во времени скорости самоката 10 согласно данному изобретению.
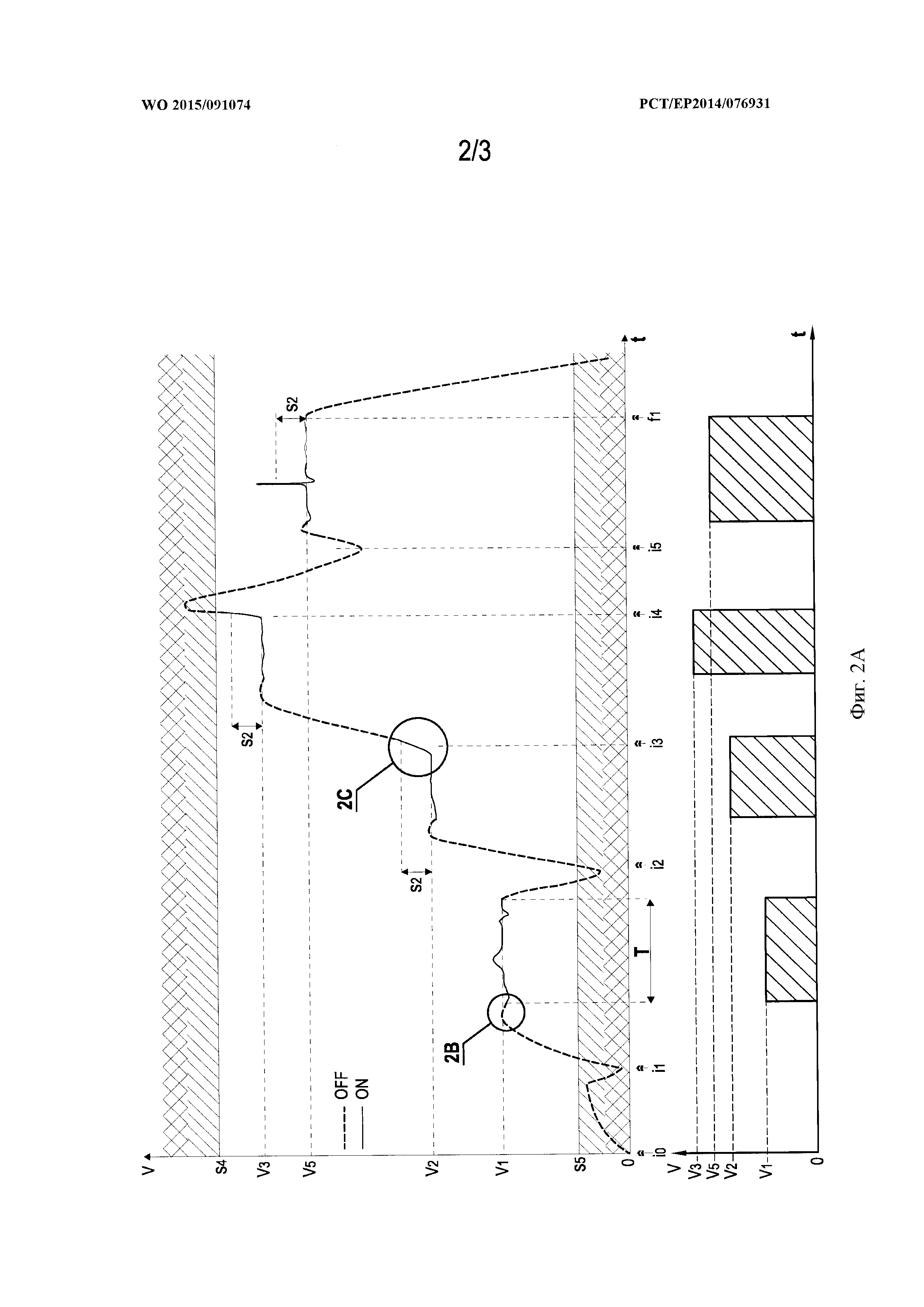
В частности, фиг. 2А, 2В и 2С представляют изменения во времени скорости самоката 10 в зависимости от действий, выполняемых пользователем самоката 10, которые заключаются в движениях i0, i1, i2, i3, i4, i5, выполняемых пользователем на самокате.
Фиг. 2А, 2В и 2С представляют первые si, вторые s2, третьи s3, четвертые s4 и пятые s5 предусмотренные пороговые величины, которые будут описаны более подробно далее.
В этом неограничительном примере первая пороговая величина si имеет значение 200 ms; вторая предусмотренная пороговая величина s2 имеет значение 10 оборотов в минуту; третья предусмотренная пороговая величина s3 имеет значение 200 ms, четвертая предусмотренная пороговая величина s4 имеет значение 400 оборотов в минуту; пятая предусмотренная пороговая величина s5 имеет значение 100 оборотов в минуту.
С другой стороны, фиг. 2А, 2В и 2С представляют попеременно пунктирными линиями и сплошными линиями фазы, во время которых самокат приводится в движение соответственно вручную, благодаря мускульным усилиям, прилагаемым пользователем, и с применением двигателя 24, приводимого в действие устройством управления 26.
Для полной ясности, нижняя часть фиг. 2А демонстрирует периоды, в течение которых двигатель 24 приводится в действие устройством управления 26, при этом скорость, которую самокат поддерживает на различных фазах действия двигателя, зависит от различных уклонов мостовых.
Обычно, когда самокат 10 остановлен, пользователь, чтобы привести его в движение, производит первое толчкообразное движение i0. Как это представлено на фиг.2А, измерения скорости, производимые периодически датчиком 11 каждые t0 ms, при t0, значение которого в качестве неограничительного примера равно 40 ms, возрастают; средства обнаружения ускорения 26а определяют, таким образом, фазу ускорения движения i0 ниже пятой предусмотренной пороговой величины s5.
Устройство управления 26 выполнено с возможностью не приводить в действие двигатель 24, когда скорость самоката 10, определенная устройством определения скорости, ниже пятой предусмотренной пороговой величины s5; двигатель 24, таким образом, не приводится в действие по истечении этого первого движения i0.
После обнаружения средствами обнаружения ускорения 26а устройства управления 26 фазы ускорения скорости движения, вызванного первым движением i0, средства обнаружения 26b обнаруживают фазу замедления скорости движения в течение периода, который меньше первой предусмотренной пороговой величины si.
Устройство управления 26 выполнено с возможностью приведения в действие двигателя 24, когда фаза замедления скорости движения, имеющая длительность, превосходящую или равную первой предусмотренной пороговой величине si, обнаружена с помощью средств обнаружения замедления движения, после того как фаза ускорения скорости движения обнаружена с помощью средств обнаружения ускорения движения; двигатель 24, таким образом, не приводится в действие во время этой фазы замедления скорости движения.
Затем пользователь осуществляет новое толчкообразное движение i1.
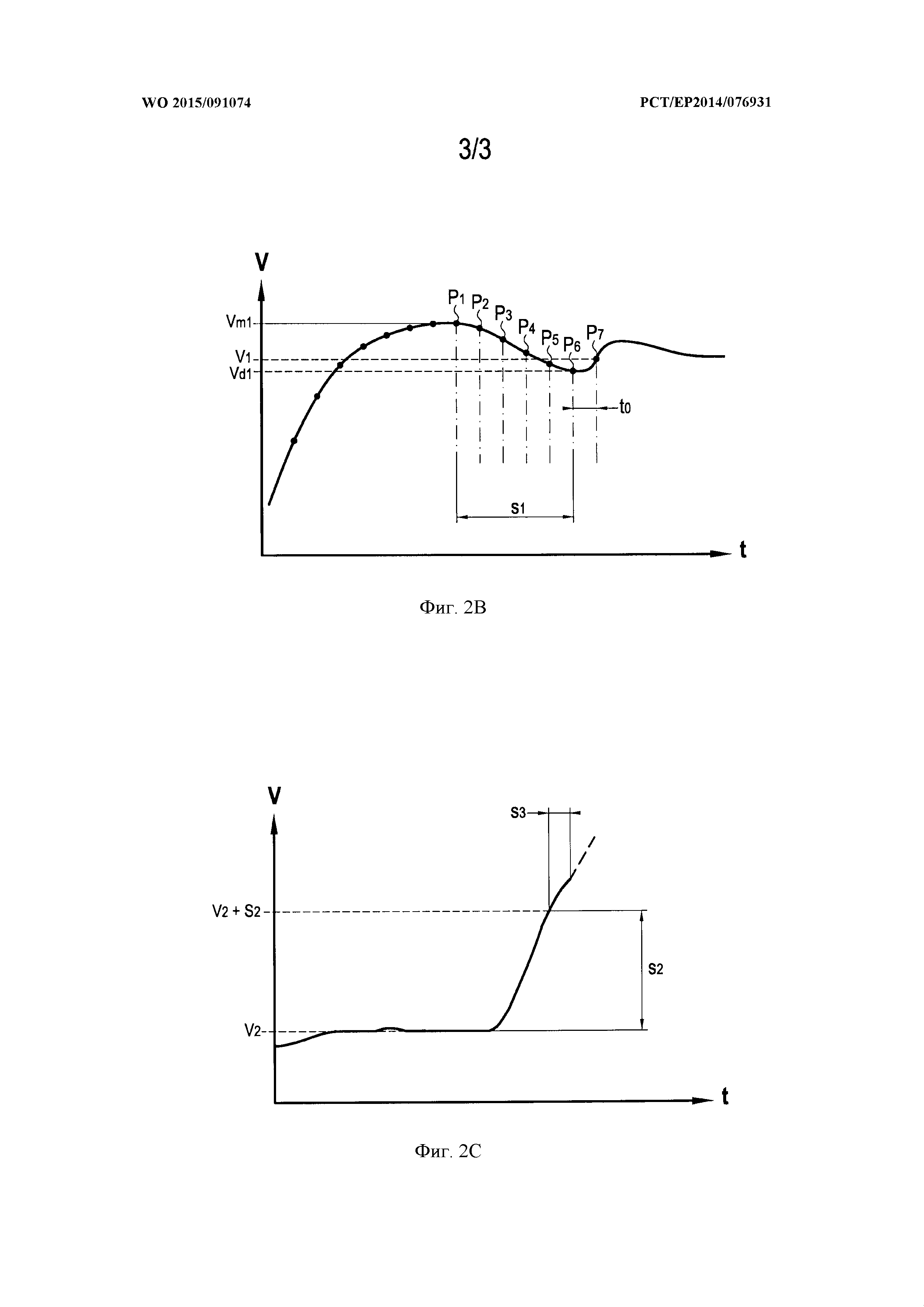
Как видно на фиг. 2А, в результате этого толчкообразного движения i1 средства обнаружения ускорения движения обнаруживают ускорение скорости движения самоката, в течение которого его скорость, определенная с помощью устройства определения скорости, превышает пятую предусмотренную пороговую величину s5 до достижения скорости vm1, показанной на фиг. 2В.
В качестве неограничительного примера средства обнаружения ускорения движения обнаруживают фазу ускорения скорости движения самоката 10, когда скорости, последовательно определенные устройством определения скорости, и измеренные в постоянном интервале t0, являются возрастающими.
Средства обнаружения замедления ускорения скорости, в свою очередь, обнаруживают фазу замедления скорости движения самоката 10, когда скорости, последовательно определенные устройством определения скорости, и измеренные в постоянном интервале t0, являются убывающими. В частности, между моментами от PI до Р6, показанными на фиг. 2В, скорость самоката 10, определенная устройством определения скорости, является убывающей.
Естественно, можно создать другое средство обнаружения скорости ускорения движения и замедления движения, не выходя за рамки данного изобретения.
Как видно на фиг 2В, фаза замедления скорости движения следует за фазой ускорения скорости движения, обнаруженными соответственно средствами обнаружения ускорения движения и средствами обнаружения замедления движения, и, когда фаза обнаружения замедления скорости движения, обнаруженная средствами обнаружения замедления движения, имеет продолжительность, превышающую первую предусмотренную пороговую величину si, устройство управления 26 приводит в действие двигатель 24.
На неограничительном примере, показанном на фиг. 2В, видно, что скорость vm1 представляет самую большую величину скорости самоката 10, определенную устройством определения скорости, достигнутой в момент P1; при этом момент P1, соответствующий измерению скорости vm1, совпадает, стало быть, одновременно с концом фазы ускорения скорости движения, обнаруженной средствами обнаружения ускорения движения, и с началом фазы замедления движения, обнаруженной средствами обнаружения замедления движения.
Как представлено на фиг. 2В, первая предусмотренная пороговая величина si имеет, в качестве неограничительного примера, значение 5 интервалов t0, в течение которых скорости определены с помощью устройство определения скорости в моменты Р2, Р3, Р4, Р5 et Р6; при этом двигатель 24 приводится в действие устройством управления 26 в конце убывающей пятой скорости, определенной вслед за скоростью vml с помощью устройства определения скорости в момент Р6.
Момент Р7, представленный на фиг. 2В, соответствует, таким образам, первой скорости, определенной устройством определения скорости во время приведения в действие двигателя 24.
Момент, представленный на этом рисунке, соответствует, следовательно, первой скорости, определенной устройством определения скорости во время приведения в действие двигателя 24.
В приведенном примере, где 5 интервалов длительностью tO=40 рассматриваются во время фазы замедления скорости движения, обнаруженной средствами обнаружения замедления движения 26b, первая предусмотренная пороговая величина si имеет, следовательно, значение 200 ms. Другими словами, понятно, что устройство управления 26 двигателем 24 обнаруживает с помощью своих средств обнаружения ускорения движения фазу ускорения скорости движения самоката 10, за которой следует фаза замедления скорости движения, обнаруживаемая с помощью его средств обнаружения замедления движения. Когда фаза замедления скорости движения, обнаруженная средствами обнаружения замедления движения имеет длительность, по меньшей мере, равной первой предусмотренной пороговой величине si, устройство управления 26 приводит в действие двигатель 24.
Как это, в частности, представлено на фиг. 2А, устройство управления 26 выполнено с возможностью приведения в действие двигатель 24 таким образом, чтобы скорость самоката 10, достигнутая в конце движения i1, поддерживалась на заданной скорости v1
Как это представлено на фиг. 2В, заданная скорость v1, зависит от скорости самоката 10 в момент приведения в действие двигателя 24. В этом примере заданная скорость v1 имеет постоянную величину, равную приблизительно 180 оборотов в минуту.
Как станет понятно в ходе этого описания, заданная скорость v1, с которой самокат 10 начинает двигаться по истечении движения i1, превышает скорость vd1, определенную устройством определения скорости, достигнутой по истечении времени si фазы замедления скорости движения, обнаруженной с помощью средств обнаружения замедления движения. В качестве неограничительного примера, устройство управления 26 применяет к скорости vd1 коэффициент больше 1, например, 1.05.
Естественно, можно было бы, не выходя за рамки данного изобретения, создать устройство управления 26, выполненное с возможностью приведения в действие двигателя 24 таким образом, чтобы заданная скорость v1, была бы равна скорости vd1 по завершении времени si фазы замедления скорости движения, обнаруженной с помощью средств обнаружения замедления движения.
В качестве альтернативы, не выходя за рамки данного изобретения, устройство управления 26 могло бы быть выполнено с возможностью приведения в действие двигателя 24 таким образом, чтобы заданная скорость v1 была бы равной одной из скоростей, определенных устройством определения скорости в течение фазы замедления скорости движения, до момента достижения скорость vd1. Как это представлено на фиг. 2А, устройство управления 26 выполнено с возможностью приведения в действие двигателя 24 с течение времени Т, равного, например, 60 секундам.
Как это представлено на фиг. 2А, в течение периода Т, во время которого двигатель 24 приводится в действие, устройство определения скорости может определять небольшие изменения скорости самоката 10; при этом устройство управления 26 выполнено таким образом, что, когда эти изменения незначительны, приведение в действие двигателя 24 не прекращается.
Характерный смысл изменений скорости самоката 10, определенных устройством определения скорости, когда двигатель 24 приведен в действие, станет более понятным в ходе данного описания.
По окончании предусмотренного времени Т устройство управления 26 прерывает приведение в действие двигателя 24, вызывая этим замедление скорости движения самоката 10, связанное с силами трения, прилагаемыми к самокату 10.
Как это представлено на фиг. 2А, пользователь прилагает новое усилие i2; средства обнаружения ускорения движения обнаруживают, таким образом, новую фазу ускорения скорости движения.
Как это представлено на фиг.2А и согласно конструктивному решению, описанному в описании фиг. 2В, устройство управления 26 двигателя 24 приводит в действие двигатель 24, если средствами обнаружения замедления движения обнаружена фаза замедления скорости движения, которая по длительности является большей или равной первой предусмотренной пороговой величине si, после того, как средствами обнаружения ускорения движения обнаружена фаза ускорения движения.
Устройство управления 26, следовательно, приводит в действие двигатель 24 таким образом, чтобы скорость самоката 10 придерживалась заданной скорости v2, которая в данном примере больше скорости v1, равной, например 200 оборотам в минуту.
В частности, констатируется, что заданные скорости v1 и v2, которых придерживается скорость самоката 10 соответственно после толчкообразных движений i1 и i2, отличаются, так как они зависят от скорости самоката 10 в момент приведения в действие двигателя 24 устройством управления 26. Как это представлено на фиг. 2А, пользователь совершает новое толчкообразное движение i3, в то время как двигатель 24 приведен в действие в течение периода Т.
В частности, как это представлено на фиг. 2С, в результате этого движения i3, выполненного пользователем, средства обнаружения ускорения движения обнаруживают новую фазу ускорения скорости движения, в ходе которой скорость самоката 10 увеличивается, значительно превышая заданную скорость v2. Точнее, положительное изменение скорости самоката 10, наблюдаемое с момента заданной скорости v2, превышает вторую предусмотренную пороговую величину s2.
Как это показано в описании фиг. 2С, устройство управления 26 выполнено таким образом, что, когда скорость самоката 10, определенная устройством определения скорости, превышает заданную скорость v2 больше, чем на вторую предусмотренную пороговую величину s2 в течение промежутка времени, превосходящего третью предусмотренную пороговую величину s3, приведение в действие двигателя 24 прерывается.
Другими словами, устройство управления движения обнаруживает новое толчкообразное движение потребителя и прерывает действие двигателя
По завершении фазы ускорения скорости движения, обнаруженной средствами обнаружения ускорения движения, вызванного толчкообразным движением i3 и, как и в случае, представленном на фиг 2А, по завершении толчкообразных движений i1 и i2 средства обнаружения замедления движения обнаруживают фазу замедления скорости движения, продолжительность которой превосходит первую предусмотренную пороговую величину si таким образом, что устройство управления 26 включает двигатель 24, позволяя поддерживать скорость самоката 10 на заданной скорости v3, которая явно больше чем v2. В данном примере скорость v3 равна примерно 360 оборотам в минуту.
Пользователь совершает новое толчкообразное движение i4 во время действия двигателя 24 в течение периода Т.
Так же, как и случае с самокатом 10, приведенном на фиг. 2С, устройство управления 26 прерывает действие двигателя 24, когда позитивное изменение скорости самоката 10 по отношению к заданной скорости v3 больше второй предусмотренной пороговой величины s2 в течение отрезка времени, большего третьей предусмотренной пороговой величины s3.
Как представлено на фиг. 2А, по окончании фазы ускорения скорости движения, обнаруженной средствами обнаружения ускорения движения, и ввиду наличия толчкообразного движения i4, скорость самоката 10, определенная устройством определения скорости, превышает четвертую предусмотренную пороговую величину s4, которая в рамках данного примера равна 400 оборотам в минуту.
В целях безопасности устройство управления 26 выполнено с возможностью прерывания работы двигателя 24, если скорость самоката 10, определенная устройством определения скорости, превышает четвертую предусмотренную пороговую величину s4.
Вследствие чего двигатель 24 не действует; средства обнаружения замедления движения обнаруживают фазу замедления скорости движения, в течение которой скорость самоката 10 снижается до тех пор, пока пользователь не выполнит новое толчкообразное движение i5, как это представлено на фиг. 2А.
Подобно тому, как было описано ранее, когда средства обнаружения замедления движения обнаруживают фазу замедления скорости движения, имеющую длительность больше первой предусмотренной пороговой величины si, после того, как средствами обнаружения ускорения движения была обнаружена фаза ускорения скорости движения по окончании толчкообразного движения i5, устройство управления 26 включает двигатель 24.
Следовательно, двигатель 24 включается устройством управления 26 таким образом, что скорость самоката 10 поддерживается на уровне заданной скорости v5 по завершении толчкообразного движения i5, при этом заданная скорость v5 подобно другим фазам работы двигателя 24, описанным ранее, зависит от скорости самоката 10, определенной устройством определения скорости во время работы двигателя 24
В этом неограничительном примере заданная скорость v5 немного выше скорости, определенной по окончании фазы замедления скорости движения, и равна, например, 330 оборотам в минуту.
Как представлено на фиг. 2А, во время работы двигателя 24, благодаря которому скорость самоката 10 поддерживается на уровне заданной скорости v5, короткое позитивное изменение скорости самоката 10 определяется устройством определения скорости; в отличие от характеристик, описанных применительно к фиг. 2С, позитивное изменение скорости самоката 10 не превышает вторую предусмотренную пороговую величину s2 в течение времени, превосходящего третью предусмотренную пороговую величину s3.
Как было описано ранее, устройство управления 26 выполнено с возможностью прерывания работы двигателя 24, если позитивное изменение скорости самоката 10 превосходит вторую предусмотренную пороговую величину s2 в течение времени, превосходящего третью предусмотренную пороговую величину s3, при этом работа двигателя не прерывается устройством управления 26, когда устройство определения скорости определяет упомянутое краткосрочное позитивное изменение скорости самоката 10.
Другими словами, если изменение скорости самоката 10, представленное на фиг. 2А, в течение действия двигателя 24 в соответствии с толчкообразным движением i5, происходит случайно и не является результатом нового толчкообразного движения, выполняемого пользователем, устройство управления 26 не прерывает действие двигателя 24.
Для того, чтобы изменение скорости самоката 10, определенное устройством определения скорости, рассматривалось устройством управления 26 как значимое, и чтобы оно в этой связи вызвало прерывание действия двигателя 24 необходимо, стало быть, чтобы оно превосходило величину заданной скорости, соответствующую величине, по меньшей мере, равной второй предусмотренной пороговой величине s2, и, с другой стороны, чтобы превышение второй предусмотренной пороговой величины s2 было определено устройством определения скорости в течение отрезка времени, превосходящего третью предусмотренную пороговую величину s3.
После этого случайного ускорения и согласно ссылке f1 на фиг. 2А пользователь приводит в действие тормозное устройство 30.
Устройство управления 26 выполнено с возможностью прерывания действия двигателя 24, если пользователем приведено в действие тормозное устройство 30.
В результате средства обнаружения замедления движения обнаруживают новую фазу замедления скорости движения, в течение которой скорость самоката 10 снижается ниже пятой предусмотренной пороговой величины s5.
Устройство управления 26 самоката 10 согласно данному изобретению может также содержать устройство введения параметров, выполненное с возможностью позволить пользователю изменять значения предусмотренных пороговых величин si, s2, s3, s4 и s5.
Длительность периода tO определения скоростей самоката 10 устройством определения скорости может также, не выходя за рамки данного изобретения, быть измененной с помощью устройства введения параметров.
Можно также конструктивно придумать устройство управления 26, выполненное с возможностью включения двигателя 24, если условия, описанные выше, неограничительно выполнены.
Как это описано в ссылках к фиг. 1, 2А, 2В и 2С, самокат 10 согласно данному изобретению выполнен с возможностью применения способа моторизованного обеспечения, который включает:
- этап обнаружения фазы ускорения скорости движения самоката;
- этап обнаружения фазы замедления скорости движения самоката;
- этап измерения длительности фазы ускорения и
- этап включения двигателя 24, если фаза замедления скорости движения имеет длительность, по меньшей мере, равную первой предусмотренной пороговой величине si.
Способ моторизованного обеспечения содержит также этап, заключающийся в обнаружении новой фазы ускорения скорости движения в течение этапа включения двигателя и этапа прерывания работы двигателя.
Кроме того, способ моторизованного обеспечения, примененный на самокате 10 согласно данному изобретению, включает также:
- этап, заключающийся в обнаружении положительного изменения скорости самоката, превышающего вторую предусмотренную пороговую величину s2 в течение действия двигателя;
- этап, заключающийся в измерении отрезка времени, в течение которого позитивное изменения скорости самоката превышает вторую предусмотренную пороговую величину s2; и
- этап, заключающийся в прерывании действия двигателя 24, если позитивное изменение скорости самоката превышает вторую предусмотренную пороговую величину s2 в течение отрезка времени, превосходящего третью предусмотренную пороговую величину s3.
Наконец, способ моторизованного обеспечения содержит также этап, заключающийся в обнаружении возможного приведения в действие тормозного устройства 30, в то время, когда двигатель включен, и этап, заключающийся в том, чтобы прервать действие двигателя в случае обнаружения приведения в действие тормозного устройства.
Описание, приведенное выше, дается в качестве примера и не является ограничительным для данного изобретения.
В частности, изобретение, несмотря на особую адаптацию в области самокатов, может также применяться в любых средствах передвижения, таких как велосипед или скейтборд, с тем, чтобы предоставить моторизованное обеспечение, не нарушая традиционное использование средства передвижения.
Реферат
Изобретение относится к области транспортной техники, в частности к самокатам. Самокат содержит раму, переднее колесо и заднее колесо, двигатель, устройство управления двигателем. Устройство управления двигателем содержит средства обнаружения фазы ускорения и замедления движения самоката. Устройство управления выполнено с возможностью приведения в действие двигателя, когда фаза замедления скорости движения, имеющая длительность, равную заданной первой пороговой величине, обнаружена средствами обнаружения фазы замедления движения после того, как средствами обнаружения ускорения движения обнаружена фаза ускорения движения. Достигается улучшение распределения усилий пользователя транспортного средства. 9 з.п. ф-лы, 5 ил.
Комментарии