Способ и устройство для защиты дифференциалов транспортных средств - RU2240934C2
Код документа: RU2240934C2
Чертежи


Описание
Уровень техники
Изобретение относится к способу, соответственно к устройству регулирования тормозных сил, действующих на колеса транспортного средства, согласно ограничительным частям независимых пунктов формулы изобретения.
Из уровня техники известны так называемые дифференциалы, предназначенные для передачи выходного крутящего момента двигателя на ведущие колеса. Назначение таких дифференциалов состоит в первую очередь в том, чтобы компенсировать различия в частоте вращения ведущих колес одного моста, например при повороте автомобиля. При этом один ведущий мост, как правило, имеет один соответствующий механический дифференциал, так называемый межколесный дифференциал.
При наличии более одного ведущего моста, например, у полноприводных транспортных средств в последних имеется, кроме того, еще один дифференциал (межосевой дифференциал), предназначенный в первую очередь для компенсации различий в частоте вращения колес разных ведущих мостов.
Несмотря на это дифференциалы способны лишь в ограниченной степени компенсировать различия в частоте вращения правого и левого колеса, соответственно колес заднего и переднего моста. Когда разность частот вращения превышает некоторое критическое предельное значение, происходит разрушение дифференциала (и шины) под действием слишком высоких центробежных сил. При этом транспортное средство теряет способность к передвижению и, как следствие, появляется необходимость в дорогостоящем ремонте соответствующих деталей.
Полноприводные транспортные средства по соображениям экономии затрат все чаще оснащают открытыми дифференциалами. С той целью, чтобы в случае, например, пробуксовывания одного колеса одного моста обеспечить тем не менее возможность передачи крутящего (приводного) момента на другое колесо этого же моста, применяют прежде всего в автомобилях повышенной проходимости механически блокируемые дифференциалы. Межосевой дифференциал также может быть выполнен блокируемым, чтобы даже при двух пробуксовывающих колесах одного моста приводной момент мог передаваться на другой мост.
Однако эту функцию блокировки невозможно обеспечить в так называемых открытых дифференциалах, конструкцией которых не предусмотрена возможность их механической блокировки даже за счет воздействия, заключающегося в регулируемом торможении колеса с одной стороны (система регулирования тормозного момента, СРТМ), соответственно у полноприводных транспортных средств - за счет дополнительного воздействия, заключающегося в торможении колес одного моста. Пробуксовывающее колесо, соответственно пробуксовывающие колеса одного моста можно тормозить только целенаправленно, соответственно индивидуально каждое колесо.
Вместе с тем именно у полноприводных транспортных средств с открытыми дифференциалами последние могут очень быстро выйти из строя в том случае, когда три колеса стоят неподвижно (например, на асфальте) и только одно колесо стоит на льду (или "висит в воздухе"), и водитель при включенном сцеплении "дает полный газ", доводя частоту вращения вала двигателя до максимальных значений. Если в этом случае воздействие, регулирующее торможение колеса с одной стороны, не обеспечивает затормаживания этого колеса, то весь приводной момент передается на это колесо, ускоряя его вращение. При этом соотношение частоты вращения вала двигателя и колеса в два раза выше, чем у транспортного средства с "обычным" распределением приводного момента между ведущими колесами. В этом случае отдельное колесо может в течение одной секунды разогнаться до скорости в несколько сот км/ч. Подобные ситуации возникают прежде всего при неправильных переключениях передач автоматической коробкой передач. Под действием таких исключительно высоких центробежных сил шина может разрушиться или по меньшей мере ее структура может нарушиться до такой степени, что в последующем она может лопнуть с возможными фатальными последствиями.
Даже если используемые дифференциалы имеют механически прочную конструкцию и способны по меньшей мере кратковременно выдерживать очень большую разницу в частотах вращения, то прочность шин представляет собой серьезную проблему, прежде всего если речь идет о шинах с рисунком протектора повышенной проходимости, которые в принципе не рассчитаны на движение с очень высокой скоростью.
Исходя из вышеизложенного, в основу настоящего изобретения была положена задача обеспечить с использованием простых средств эффективную защиту дифференциалов, соответственно шин.
Эта задача решается с помощью отличительных признаков, представленных в независимых пунктах формулы изобретения.
Преимущества изобретения
Настоящее изобретение согласно первому варианту относится к способу, соответственно устройству, регулирования выходного крутящего момента ДВС в транспортном средстве по меньшей мере с четырьмя установленными по меньшей мере на двух мостах и приводимыми во вращение указанным ДВС колесами. Для передачи приводного момента на ведущие колеса предусмотрен по меньшей мере один межколесный дифференциал для соответствующего моста с ведущими колесами и межосевой дифференциал для двух мостов с ведущими колесами. Для режима передачи крутящего момента на ведущие колеса транспортного средства предусмотрена деактивизируемая система управления тормозными силами индивидуально для каждого колеса (система регулирования тормозного момента, СРТМ) и/или система управления выходным крутящим моментом ДВС (система регулирования приводного момента, СРПМ). Основная идея изобретения заключается при этом в том, что при деактивизированной системе управления тормозными силами индивидуально для каждого колеса и/или системе управления выходным крутящим моментом ДВС:
- регистрируют значения частоты вращения, характеризующие вращение колес транспортного средства,
- в зависимости от полученных значений частоты вращения формируют значения разности, характеризующие разность частот и/или скоростей вращения на выходах дифференциалов,
- эти значения разности сравнивают с заданными пороговыми значениями и
- при превышении по крайней мере одного из этих пороговых значений регулируют выходной крутящий момент ДВС, изменяя его в сторону понижения.
Согласно второму варианту в изобретении предлагаются способ, соответственно устройство, регулирования выходного крутящего момента ДВС в транспортном средстве по меньшей мере с четырьмя установленными по меньшей мере на двух мостах и приводимыми во вращение указанным ДВС колесами. В этом случае также предусмотрен по меньшей мере один межколесный дифференциал для соответствующего моста с ведущими колесами и один межосевой дифференциал для двух мостов с ведущими колесами. Согласно изобретению в этом варианте
- регистрируют значения частоты вращения, характеризующие вращение колес транспортного средства,
- в зависимости от полученных значений частоты вращения формируют значения разности, характеризующие разность частот и/или скоростей вращения на выходах дифференциалов,
- эти значения разности сравнивают с заданными пороговыми значениями и
- при превышении по крайней мере одного из этих пороговых значений частоту вращения выходного вала ДВС ограничивают задаваемым предельным значением.
При этом следует отметить следующее.
В "обычном случае" в режиме передачи крутящего момента на ведущие колеса описанная выше система регулирования блокировки предотвращает за счет активного торможения индивидуально для каждого колеса (СРТМ) появление слишком большой разницы в частотах вращения на выходах дифференциалов. Однако существует целый ряд возможных ситуаций, приводящих к деактивизации этой системы регулирования тормозного момента (СРТМ) в следующих случаях:
- водитель в режиме передачи крутящего момента на ведущие колеса тормозит сознательно, например при движении по бездорожью, или бессознательно (при двухпедальной системе управления);
- регулирование тормозного момента (СРТМ) на одном колесе может быть отключено из-за предполагаемого перегрева колесного тормозного механизма;
- равным образом к бездействию СРТМ может приводить недостаточная мощность торможения определенного колеса, обусловленная, например, неисправностью колесного тормозного механизма.
Наряду с системой регулирования тормозного момента (СРТМ) может быть предусмотрена также система регулирования приводного момента (СРПМ), регулирующая передаваемый на ведущие колеса приводной момент таким образом, чтобы исключить возможность чрезмерного пробуксовывания ведущих колес. Деактивизировать систему регулирования приводного момента (СРПМ) может, например, сам водитель. Происходить это может, например, в том случае, когда водитель отключает систему регулирования курсовой устойчивости.
Таким образом, управление (СРТМ) торможением индивидуально для каждого колеса может быть деактивизировано в том случае, когда:
- происходит инициированное водителем торможение и/или
- зарегистрированная температура по меньшей мере одного колесного тормозного механизма превышает заданное пороговое значение и/или
- водитель вручную отключает эту систему управления.
Описанная выше проблема решается согласно изобретению за счет вычисления и контроля разности частот вращения путем анализа значений частот вращения колес. При превышении определенного предельного значения соответствующий регулятор понижает, соответственно ограничивает, крутящий момент двигателя, соответственно частоту вращения его вала, таким образом, чтобы исключить возможность поломки транспортного средства. Этот же подход позволяет также эффективно корректировать ошибки водителя при управлении транспортным средством.
Согласно одному из предпочтительных вариантов осуществления изобретения в соответствии с вышеописанным первым вариантом предлагается при превышении по крайней мере одного из пороговых значений активизировать описанную выше активную в режиме передачи крутящего момента на ведущие колеса транспортного средства систему (СРПМ) управления выходным крутящим моментом ДВС. Тем самым удается исключить чрезмерное пробуксовывание ведущих колес.
Согласно одному из предпочтительных вариантов осуществления изобретения в соответствии с вышеописанным вторым вариантом предлагается задавать предельное значение в зависимости от того дифференциала, для которого указанное значение разности превышает заданное пороговое значение.
Обычно в кинематической цепи после ДВС установлена ступенчатая или автоматическая коробка передач. При этом во втором варианте согласно изобретению предлагается задавать предельное значение, которым ограничена частота вращения выходного вала двигателя в зависимости от текущего передаточного отношения коробки передач.
Другие предпочтительные варианты осуществления изобретения представлены в зависимых пунктах формулы.
Чертежи
Ниже изобретение более подробно рассмотрено на примере некоторых вариантов его осуществления со ссылкой на прилагаемые чертежи, на которых показано:
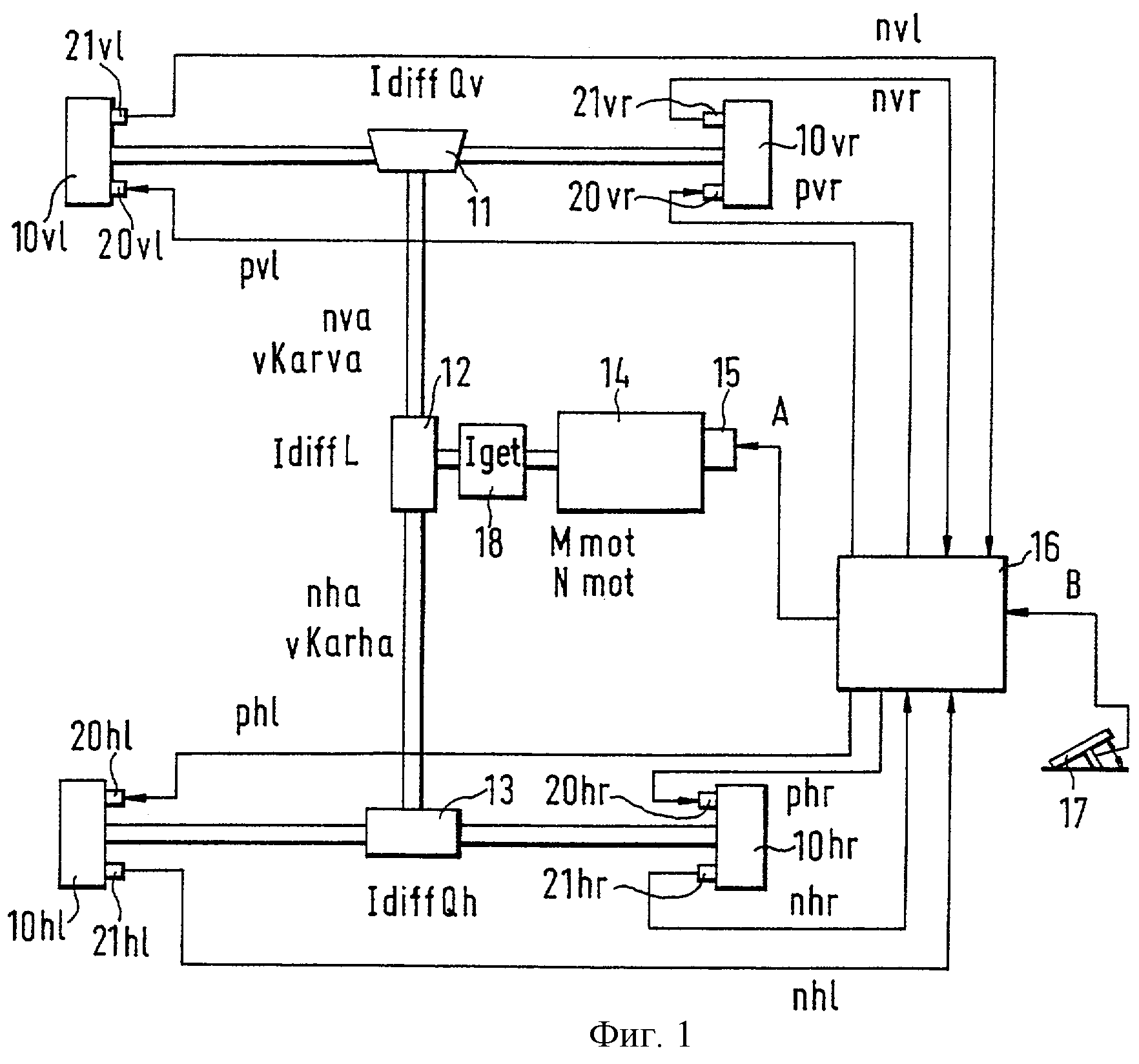
на фиг.1 - схема предлагаемого устройства;
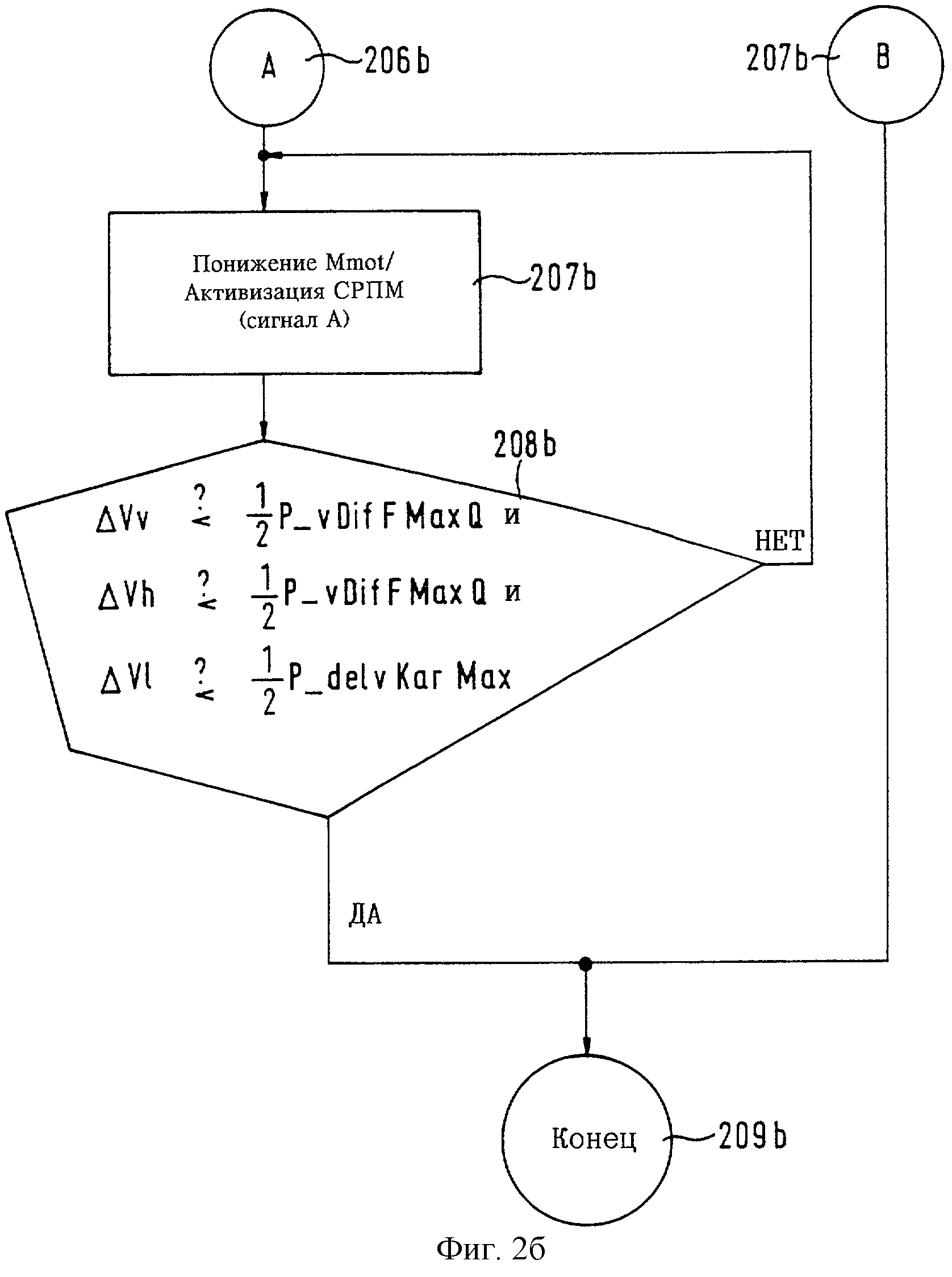
на фиг.2а и 2б - блок-схема, иллюстрирующая первый вариант осуществления предлагаемого способа;
на фиг.2а и 2в - блок-схема, иллюстрирующая второй вариант осуществления предлагаемого способа.
Варианты осуществления изобретения
На фиг.1 схематично показано четырехколесное полноприводное транспортное средство с четырьмя колесами, обозначенными позициями 10ij. При этом индекс i указывает на принадлежность колеса либо к переднему мосту (i=v), либо к заднему мосту (i=h). Индекс j указывает на расположение соответствующего колеса либо с правой (j=г), либо с левой (j=1) стороны транспортного средства.
Колеса 10ij имеют соответствующие колесные тормозные механизмы 20ij, управление которыми осуществляется сигналами pij для задания определенной тормозной силы, а также датчики 21ij частоты вращения nij колес.
Между колесами каждого моста расположен соответствующий межколесный дифференциал 11 и 13, а между мостами, соответственно осями, расположен межосевой дифференциал 12. Выходной крутящий момент Mmot двигателя 14, соответственно вращение выходного вала этого двигателя с частотой Nmot, передаются через ступенчатую или автоматическую коробку 18 передач на вход межосевого дифференциала 12.
Управление двигателем осуществляет соответствующий блок 15 управления. Такое управление заключается прежде всего в задании выходного крутящего момента Mmot двигателя, соответственно частоты вращения Nmot выходного вала двигателя. С этой целью в блок 15 управления от блока 16 обработки поступает управляющий сигнал А.
В блок 16 обработки в свою очередь поступает сигнал В, характеризующий степень нажатия на педаль 17 тормоза. Кроме того, в блок 16 обработки поступают сигналы, характеризующие частоту вращения nij колес. Блок 16 обработки управляет помимо прочего колесными тормозными механизмами 20ij с помощью сигналов pij.
Ниже рассмотренные выше процессы поясняются с помощью блок-схемы, показанной на фиг.2а.
После начального шага 201 на шаге 202 определяется частота вращения nij колес и соответствующие этим частотам вращения сигналы подвергаются фильтрации, например элементом PT1.
На шаге 203 для переднего и заднего мостов определяются абсолютные значения разности скоростей вращения колес:
ΔVv=Δnv(π·Rrad)/30=|nvr–nvl|(π·Rrad)/30,
ΔVh=Δnh(π ·Rrad)/30=|nhr–nhl|(π·Rrad)/30,
где Rrad означает радиус колеса.
Затем определяется абсолютное значение разности Δnl скоростей вращения vkarva и vkarha карданных валов на переднем и заднем мосту в виде разности этих скоростей в продольном направлении:
vkarva=nkarva·(π·Rrad)/30=[(nvr+nvl)/2]· (π·Rrad)/30],
vkarha=nkarha·(π·Rrad)/30=[(nhr+nhl)/2]·(π·Rrad)/30],
ΔVl=|vkarva-vkarha|.
Величины ΔVv, ΔVh и ΔV1 являются мерой нагрузки отдельных дифференциалов 11, 12 и 13.
На шаге 204 величины ΔVv, ΔVh и ΔV1 сравниваются с допустимыми предельными значениями P_vDifFMaxQ, соответственно P_delvKarMax. При отсутствии превышения этих предельных значений происходит переход через шаг 207 непосредственно к конечному шагу 209b/с.
Если же слишком высокие значения проскальзывания ведущих колес достигли или превысили какое-либо предельное значение, то происходит переход к шагу 205.
На шаге 205 проверяется, связаны ли величины ΔVv, ΔVh и ΔV1 теми разностями частот вращения, которые обусловлены скольжением колес при торможении. Разности, обусловленные скольжением колес при торможении, не должны приводить к срабатыванию системы защиты дифференциалов.
В показанном на фиг.2б первом варианте при превышении по крайней мере одного из предельных значений P_vDifFMaxQ, соответственно P_delvKarMax, на шаге 207b по сигналу А (фиг.1) в любом случае активизируется система регулирования крутящего момента двигателя, чтобы путем устранения кинематических связей, обеспечивающих передачу приводного момента Mmot (т.е. крутящего момента двигателя), соответственно путем понижения этого приводного момента Mmot обеспечить снижение частоты вращения вала двигателя, а тем самым и уменьшение разности частот вращения соответствующего дифференциала.
Следует отметить, что прежде всего в транспортных средствах, уже оснащенных для повышения их устойчивости при движении системой регулирования приводного момента (СРПМ), достаточно активизировать эту систему, поскольку выдерживаемые в системе СРПМ обычные заданные скорости вращения колес явно ниже предельных значений частоты вращения механических дифференциалов.
Мера, направленная на понижение крутящего момента двигателя для защиты дифференциала, отменяется сразу же, как только соответствующие величины снизятся существенно ниже предельных значений P_vDifFMaxQ, соответственно P_delvKarMax допустимой разности частот вращения. С этой целью величины ΔVv, ΔVh и ΔV1 сравниваются на шаге 208b с пороговыми значениями P_vDifFMaxQ, соответственно P_delvKarMax.
После конечного шага 209Ь показанный на фиг.2 цикл повторяется снова.
В другом варианте, показанном на фиг.2в, вспомогательная система регулирования частоты вращения позволяет ограничивать частоту вращения Nmot вала двигателя некритичными значениями. Такая возможность существует всегда, в том числе и транспортных средствах, еще не оснащенных системой регулирования привода ведущих колес по их пробуксовыванию. Однако для этого должна быть обеспечена возможность понижения крутящего момента двигателя по меньшей мере одним из известных способов. К таким способам относятся, например, использование дроссельных заслонок с электропневматическим регулированием их положения (EGAS), уменьшение времени впрыскивания топлива или изменение угла опережения зажигания.
Между величинами частоты вращения nij колес и частотой вращения Nmot вала двигателя у транспортного средства с открытыми дифференциалами (без понижения передаточного отношения коробки передач при движении по бездорожью) существует следующая зависимость:
nvl+nvr+nhl+nhr=4·Nmot/Iges (1)
Для общего передаточного отношения Iges справедлива следующая формула:
Iges=Iget·IdiffL· IdiffQ, (2),
где Iget означает передаточное число соответствующей ступени коробки 18 передач,
IdiffL означает передаточное отношение дифференциала 12 в продольном направлении,
IdiffQ означает передаточное отношение дифференциалов 11 и 13 в поперечном направлении.
Для переднего, соответственно заднего, моста справедливы следующие зависимости, основанные на вышеприведенных формулах
nvl+nvr=4·Nmot/Iges-nhl-nhr, (3)
nhl+nhr=4·Nmot/Iges-nvl-nvr (4)
или
nkritQva=4·Nmot/Iges-nhl-nhr-2·nvr, (5)
nkritQha=4·Nmot/Iges-nvl-nvr-2·nhr, (6)
где nkritQva = nvl - nvr представляет собой максимально допустимую разность частот вращения колес переднего моста,
nkritQha = nhl - nhr представляет собой максимально допустимую разность частот вращения колес заднего моста.
При условии, что в наихудшем для дифференциалов случае три колеса остаются неподвижными, а одно единственное колесо вращается свободно, с учетом формул (5) и (6) справедлива следующая зависимость:
nkritQva=4·Nmot/Iges (где nvr=nhl=nhr=0), (7)
nkritQha=4·Nmot/Iges (где nhr=nvl=nvr=0). (8)
Если критическую разность частот вращения в поперечном направлении nkritQ выразить в соответствии с уравнениями (7) и (8) в виде разности скоростей вращения колес (P_vDifFMaxQ), то получают следующую зависимость:
P_vDifFMaxQ = nkritQ·π/30·Rrad, (9)
где Rrad означает радиус колеса.
Таким образом, если на шаге 204 будет установлено, что одна из величин ΔVv и ΔVh превышает допустимую разность P_vDifFMaxQ скоростей вращения колес, то на шаге 207с частота вращения Nmot вала двигателя ограничивается вспомогательным регулятором частоты вращения или системой регулирования приводного момента (СРПМ) предельным значением NmotMaxQ
NmotMaxQ = nkrit·Iges/4. (10)
В этом случае на шаге 205 также проверяется, не связаны ли указанные различия в частоте вращения скольжением колес при торможении. Различия, обусловленные скольжением колес при торможении, не должны приводить к активизации системы защиты дифференциалов.
Как уже указывалось выше, межосевой дифференциал 12 полноприводного транспортного средства, обеспечивающий в продольном направлении необходимое выравнивание частот вращения колес переднего и заднего мостов, также должен быть защищен от слишком больших различий в частотах вращения этих колес.
Для главных передач частоты вращения определяются следующими уравнениями:
nva=IdiffQv·(nvl+nvr)/2, (11)
nha=IdiffQh·(nhl+nhr)/2. (12)
Средняя скорость вращения колеса соответствующего моста определяется на основании следующих зависимостей:
vKarva=(π·fRrad/30)((nvl+nvr)/2, (13)
vKarha=(π·fRrad/30)((nvl+nvr)/2, (14)
Для максимально допустимой разности частот вращения в продольном направлении nkritL справедливо следующее равенство:
nkritL=|nva-nha| (15)
или с учетом уравнений (11)-(15)
nkritL=IdiffQ·(30/(π·Rrad))(|vKarva-vKarha|. (16)
Разность скоростей вращения deIvKar карданных валов определяется по следующей формуле:
deIvKar=|vKarva-vKarha|, (17),
а предельно допустимое значение определяется по следующей формуле:
P_delvKarMax=nkritL·IdiffQ·(π·Rrad/30). (18)
Если на шаге 204 будет обнаружено превышение допустимой разности скоростей P_delvKarMax вращения карданных валов, то частота вращения Nmot вала двигателя должна быть ограничена вспомогательным регулятором частоты вращения следующим предельным значением NmotMaxL
NmotMaxL=nkritL·Iget·IdiffL/4. (19)
Таким образом, у полноприводного транспортного средства с межколесным и межосевым дифференциалами частота вращения Nmot вала двигателя ограничивается на шаге 207 со следующим значением:
NmotMax = Min (NmotMaxQ, NmotMaxL). (20)
Такое ограничение происходит путем соответствующей выдачи сигнала А (фиг.1).
Мера, направленная на понижение крутящего момента двигателя для защиты дифференциала, отменяется сразу же, как только соответствующие величины существенно снизятся ниже предельных значений P_vDifFMaxQ, соответственно P_delvKarMax, допустимой разности частот вращения. Для этого величины ΔVv, ΔVh и ΔV1 сравниваются на шаге 208с с пороговыми значениями P_vDifFMaxQ, соответственно P_delvKarMax.
После конечного шага 209с показанный на фиг.2 цикл повторяется снова.
В показанном на фиг.2 цикле дополнительно можно предусмотреть опрос по времени. Меры, предусмотренные на шаге 207b, соответственно 207с, вводятся лишь в том случае, когда выявленное на шаге 204 превышение определенного порогового значения длится в течение достаточно продолжительного интервала времени.
В заключение следует отметить, что основная идея и преимущество изобретения заключаются в расчете и контроле разностей скоростей вращения, соответственно разностей частот вращения в поперечном направлении у любых транспортных средств (передне-, задне- и полноприводных), а у полноприводных - и имеющейся в продольном направлении разницы в скоростях вращения карданных валов. При превышении заданных пороговых значений происходит автоматическое понижение приводного момента (крутящего момента двигателя), соответственно автоматическое ограничение частоты вращения вала двигателя до приемлемых величин.
Подобная функция защиты дифференциалов, которую невозможно отключить, присутствует даже при пассивно включенной системе регулирования приводного момента (СРПМ). Реализовать эту функцию можно только на программном уровне с использованием уже имеющихся датчиков и регуляторов. При этом затраты на разработку подобных программных приложений являются минимальными.
Реферат
Изобретение относится к области транспортного машиностроения и предназначено для защиты дифференциалов транспортных средств. Способ и устройство регулирования выходного крутящего момента двигателя внутреннего сгорания, соответственно выходной частоты вращения его вала, предназначены для защиты дифференциалов. Преимущество изобретения заключается в расчете и контроле разностей скоростей вращения, соответственно разностей частот вращения в поперечном направлении у любых транспортных средств – передне-, задне-, полноприводных, а у полноприводных дополнительно - имеющейся в продольном направлении разницы в скоростях вращения карданных валов. При превышении заданных пороговых значений происходит автоматическое ограничение частоты вращения вала двигателя до приемлемых величин. Подобная функция защиты дифференциала, которую невозможно отключить, присутствует даже при пассивно включенной системе регулирования приводного момента. Реализовать эту функцию можно только на программном уровне с использованием уже имеющихся датчиков и регуляторов. Техническим результатом является обеспечение с помощью простых средств эффективной защиты дифференциалов и соответственно шин транспортных средств. 4 н. и 8 з.п. ф-лы, 4 ил.

Комментарии