Трансмиссия механическая с гидравлическими дифференциальными связями ведущих колес и многорежимной системой электронного управления их блокировкой для автотранспортного средства повышенной проходимости - RU2692737C1
Код документа: RU2692737C1
Чертежи










Описание
Изобретение относится к области транспортного машиностроения, и может быть использовано в конструкции колесных автотранспортных средств повышенной проходимости.
Целями предлагаемого изобретения являются повышение маневренности, проходимости и экономичности колесных полноприводных АТС в различных условиях дорожного и внедорожного движения и за счет более полной адаптации к ним режимов и параметров самоблокировки межосевой и межколесных дифференциальных связей трансмиссии, повышения стабильности заданных режимов самоблокировки и облегчения управления АТС в экстремальных условиях движения,
При прямолинейном движении АТС и неодинаковом коэффициенте сцепления правых и левых колес наиболее эффективен режим синхронного вращения колес. Поэтому частичная или полная блокировка межколесных дифференциальных связей (МКДС) при внедорожном прямолинейном движении повышает проходимость АТС.
При непрямолинейной траектории движения частота вращения колес "забегающего" борта АТС (4к4) должна превышать частоту вращения колес "отстающего" борта. При наличии полной или частичной блокировки межколесных дифференциальных связи крутящие моменты замедляющихся колес увеличиваются, а ускоряющихся - уменьшаются. Разница крутящих моментов колес ведущего моста определяет величину блокирующего момента, который при полной блокировке максимален. От суммы блокирующих моментов МКДС передних и задних колес зависит момент сопротивления повороту АТС, действующий в горизонтальной плоскости и увеличивающий боковую нагрузку и боковой увод передних колес. Все указанные показатели увеличиваются по мере повышения скорости движения и кривизны траектории. В этих условиях полная блокировка ухудшает маневренность.
Компромиссным решением обеспечения проходимости и маневренности являются самоблокирующиеся дифференциалы, которые в настоящее время получили широко применение на АТС (4к4). Их блокирующий момент зависит либо от передаваемого крутящего момента, либо - от разности частоты вращения колес. Это дифференциалы, чувствительные к нагрузке и чувствительные к скорости или разности скоростей. В первом случае коэффициент блокировки либо постоянен, либо меняется в узких пределах, а переход от блокированного состояния к дифференциальному носит "релейный" характер. Во втором случае дифференциальная связь колес постоянна, а блокирующий момент по мере увеличения разности вращения колес возрастает в соответствии с характеристикой самоблокировки - зависимости блокирующего момента от разности частоты вращения колес.
К последнему типу дифференциалов можно отнести широко применяемые "вискомуфты". Однако из-за инерционности процесса изменения вязкости рабочей жидкости в условиях меняющегося сцепления и непостоянного сопротивления качению колес, характерных для грунтовых дорог и внедорожного движения, они не эффективны.
Известен самоблокирующийся "героторный" межколесный дифференциал "Hydra-Loc" |1|. Это механический шестеренный дифференциал с фрикционной гидроуправляемой блокирующей муфтой. Управляющий гидроцилиндр муфты через игольчатый дроссель соединен с нагнетательной полостью героторного гидронасоса, статор и ротор которого соединены с корпусом дифференциала и одной из полуосей, соответственно. При разности частоты вращения колес Δωк частота относительного вращения статора и ротора равна Δω=0.5Δωк. Величина потока рабочей жидкости от гидронасоса, перепускаемого через игольчатый дроссель, пропорциональна Δω, усилие управляющего гидроцилиндра пропорционально давлению рабочей жидкости, а момент сопротивления взаимному вращению статора и ротора определяется зависимостью

где С - коэффициент жесткости самоблокировки, а показатель степени k изменяется примерно от 2 при малых значениях Δω до 0.5 при больших значениях Δω.
Сравнительный анализ |2| двух типов самоблокирующих МКД трансмиссии АТС (4к4) при круговом движении с различными радиусами его траектории и с различной скоростью на грунте при вариации коэффициентами сопротивления качения и сцепления колес, коэффициентами блокировки Kбл МКД первого типа и коэффициента С при k=2 для МКД второго типа выявил следующее. При неодинаковом сцеплении и сопротивлении качению колес "отстающего" и "забегающего" борта АТС по показателям статической и динамической поворотливости, запасу сцепления и экономичности эффективнее МКД второго типа с зависимостью блокирующих момента от разности частоты вращения колес "отстающего" и "забегающего" борта. При этом целесообразно регулирование величины С, но в достаточно узком диапазоне. При одинаковом сцеплении и сопротивлении качению всех колес на пониженных скоростях движения и при большей кривизне траектории второй тип МКД также эффективнее. А при радиусах поворота более 50 м и соответствующих (повышенных) скоростях движении более эффективен самоблокирующийся МКД с пропорциональной зависимостью блокирующего момента от передаваемого крутящего момента при ограниченной величине Кбл, которая должна соответствовать дорожным условиям.
При прямолинейном внедорожном движении АТС и наличии неровностей поверхности качения, обкатываемых колесами правого и левого борта не одновременно, первый тип МКД обеспечивает более устойчивое движение с меньшими угловыми отклонениями АТС в горизонтальной плоскости в сравнении с МКД второго типа.
Таким образом, для лучшей адаптации к меняющимся условиям внедорожного движения блокирующие механизмы дифференциалов должны обеспечивать комбинацию указанных режимов самоблокировки с возможностью регулирования коэффициента Кбл и С.. Кроме того, для обеспечения некоторых режимов движении (разгона, торможения, движения на буксире) необходима возможность полной блокировки и разблокировки МКД.
В самоблокирующемся дифференциалах |1| рабочая магистраль гидронасоса с неуправляемым дросселем расположена в каналах вращающегося корпуса дифференциала. Известна установка в такой магистрали электроуправляемого клапана |3|. Однако возможности такого клапана ограничены тремя рабочими позициями (при наличии двух управляющих обмоток), поэтому он не сможет обеспечить вариацию режимов самоблокировки, а также управление включением полной блокировки и разблокировки МКД.
Теоретически проблему "многорежимной" работы блокирующего механизма дифференциалов можно, было бы решить применением многодисковой фрикционной муфтой типа "Haldex" с соответствующей программой электронного управления. Однако для ее практической реализации необходимо непрерывное измерение крутящих моментов всех колес без которого невозможно управлять режимами самоблокировки, и которое пока в современных системах автомобильной электроники не решено. Система "SH-AWD" распределения крутящих моментов между осями и колесами полноприводного автомобиля, в которой основным ведущим мостом является передний, а шестеренный дифференциал заднего моста, подключаемого автоматически при определенной пробуксовке передних колес, заменен парой многодисковых муфт сцеплений, разработана фирмой "Honda". В качестве таких муфт сцепления использован однорядный планетарный механизм с заторможенной коронной шестерней посредством многодискового тормоза с электромагнитным и электронным управлением. Основной функцией такого ведущего заднего моста является улучшение управляемости автомобиля при высоких скоростях движения на дорогах с твердым покрытием, и при таких условиях движения нет необходимости измерять крутящие моменты колес |4|.
Использование в АТС повышенной проходимости шести таких сцеплений вместо трех шестеренных дифференциалов существенно увеличит габариты трансмиссии. Кроме того, утрачивается возможность дифференциального изменения частоты вращения "забегающих" и "отстающих" колес при повороте. При частоте замены масла и фильтров из-за быстрого износа фрикционных дисков многодисковых сцеплений, работающих в режиме постоянного проскальзывания, через 20000-30000 км пробега, стоимость обслуживания шести муфт с учетом стоимости запасных частей существенно удорожает эксплуатацию АТС.
Ближайшим аналогом предлагаемого изобретения является механическая трансмиссия |:5| АТС (4к4) с самоблокирующимися гидравлическими межколесными дифференциальными связями и гидравлической межосевой дифференциальной связью наиболее нагруженных колес переднего и заднего моста. В этой трансмиссии отсутствуют шестеренные дифференциалы и выходные валы в раздаточной коробке и полуоси ведущих мостов вращаются синхронно. Ведущие мосты - портального типа с несоосными колесными редукторами. Эти редукторы содержат входные цилиндрические пары, ведущие шестерни которых связаны с полуосями ведущих мостов, и однорядные планетарные механизмы, коронные шестерни которых приводятся ведомыми шестернями этих цилиндрических пар. Гидравлические межколесные дифференциальные связи осуществляются гидропередачами, состоящими из двух объемных радиально-плунжерных гидромашин обратимого действия, статоры которых закреплены внутри колесных редукторов, а роторы соединены с солнечными шестернями упомянутых выше планетарных механизмов. Водила планетарных механизмов жестко связаны с ведущими колесами АТС. Соответствующие рабочие полости гидромашин каждого ведущего моста с помощью двухпозиционных подпружиненных и электроуправляемых золотников реверса и их выходных магистралей высокого давления через пару разнонаправленных (выпускной и впускной) обратных клапанов связаны с входом и выходом гидравлического блокирующего механизма, межколесной дифференциальной связи (МКДС). При включении передачи заднего хода и изменении направления вращения колес рабочие полости гидромашин меняются ролями. По сигналу соответствующего датчика управляющие соленоиды переключают золотники реверса, которые пересоединяют рабочие полости гидромашин с выходными магистралями золотников низкого и высокого давления.
Рабочие полости каждой гидромашин через пару выпускных обратных клапанов соединены с магистралью подпитки, которую обеспечивают два насос подпитки. Один приводится первичным ДВС, а второй насос - от входного вала раздаточный коробки. Нагнетательная магистраль последнего снабжена разгрузочным клапаном, который подключает эту магистраль к магистрали подпитки в случае падения давления в ней ниже заданного уровня. При повышении давления подпитки до этого уровня, клапан соединяет упомянутую магистраль с резервуаром рабочей жидкости.
В тяговом режиме ведущих мостов при одинаковом давлении на выходах из золотников реверса обратные клапаны перекрывают циркуляцию рабочей жидкости между гидромашинами. В этом случае гидромашины и солнечные шестерни застопорены и оба ведущих колеса вращаются синхронно. В случае поворота АТС его внутренние колеса (колеса "отстающего" борта) замедляют свое вращения за счет вращения солнечных шестерен и связанных с ними роторами гидромашин соответствующих колесных редукторов в обратном направлении, в режиме насоса, повышая давление и открывая соответствующие впускные обратные клапаны на входах в гидравлические блокирующие устройства. Наружные колеса (колеса "забегающего" борта) ускоряют свое вращение за счет вращения солнечных шестерен и связанных с ними роторов гидромашин в направлении вращения колес. При этом давление на выходах золотников реверса гидромашин этих колес падает. При этом соответствующие выпускные обратные клапаны открывают выходы из гидравлических блокирующих механизмов. В результате открывается путь рабочей жидкости от гидромашин внутренних колес к соответствующим гидромашинам наружных колес через гидравлические блокирующие механизмы. Между входной и выходной магистралями каждого гидравлического блокирующего механизма (МКДС) установлены последовательно соединенные двухпозиционный с электроуправлением золотник включения полной блокировки и два нерегулируемых дросселя с малым и с увеличенным в 4-5 раз коэффициентом сопротивления. При этом второй дроссель с помощью аналогичного двухпозиционного золотника может отключаться, что обеспечивает уменьшение коэффициента сопротивление гидравлического блокирующего механизма в: 5-6 раз. Между входом и выходом упомянутого механизма также включен двухпозиционный гидроуправляемый золотник полной разблокировки гидравлического блокирующего механизма. Торцевая управляющая полость этого золотника соединена посредством двух впускных обратных клапанов с входными магистралями низкого давления золотников реверса, связанными с рабочими полости гидромашин низкого давления (сливной и всасывающей). В тяговом режиме ведущих колес в этой магистрали - давление подпитки. В случаях движения АТС "накатом" и торможения двигателем, запуска двигателя путем буксировки АТС или аварийной буксировки АТС крутящие моменты колес отрицательны и давление в вышеупомянутой магистрали и управляющей торцевой полости золотника превышает давление подпитки.. В этом случае золотник, отжимая пружину, соединяет напрямую вход и выход гидравлического блокирующего механизма. При этом обеспечивается полная его разблокировка. При отключении управляющих соленоидов золотников полной блокировки в тяговом режиме колес гидравлические блокирующие механизмы обеспечивают два режима самоблокировки, при которой блокирующие моменты МКДС примерно (без учета объемных и механических потерь в гидромашинах) пропорциональны квадратам разности частот вращения соответствующих колес.
Параллельно указанным гидравлическим блокирующим механизмам МКДС с выходными магистралями высокого давления золотников реверса соединены входы в торцевые полости трехпозиционных с центрирующими пружинами избирательных клапанов, выходы из которых связаны межосевой магистралью высокого давления. При одинаковом давлении в торцевых полостях избирательный клапан находится в нейтральном положении. В этом случае выход в межосевую магистраль перекрыт. При наличии перепада давления в соответствующем гидравлическом блокирующем механизме МКДС и соответствующих торцевых полостях избирательного клапана он перемещается. При этом вход менее нагруженной выходной магистрали золотника реверса гидромашины, работающей в режиме мотора, перекрывается, а вход более нагруженной выходной магистрали золотника реверса гидромашины, работающей в режиме насоса, соединяется с межосевой магистралью. В эту магистраль включен гидравлический блокирующий механизм, который обеспечивает дифференциальную связи более нагруженных колес переднего и заднего моста. Этот механизм в содержит последовательно соединенные нерегулируемый дроссель и двухпозиционный подпружиненный золотник с управляющим соленоидом, при включении которого золотник перекрывает межосевую магистраль. Это обеспечивает полную блокировку дифференциальной связи между более нагруженными колесами переднего и заднего ведущих мостов. Включение этого золотника происходит одновременно с включением золотников полной блокировки МКДС. Коэффициент сопротивления дросселя увеличен в сравнении с дросселями гидравлических механизмов МКДС.
Между упомянутыми выше входными магистралями золотников реверса низкого давления в гидросистеме каждого ведущего моста включен блок автоматического гидравлического управления блокировкой МКДС при отрицательных крутящих моментах колес ведущего моста. Он содержит два двухпозиционных гидроуправляемых подпружиненных золотника "постоянно открытого", управляющая торцевая полость которого соединена посредством двух впускных обратных клапанов с входными магистралями низкого давления золотников реверса, и "постоянно закрытого", управляющая торцевая полость которого связана с нагнетательной магистралью упомянутого выше насоса подпитки, приводимого от первичного ДВС. При "аварийной" буксировке АТС давление в управляющей торцевой полости "постоянно открытого" золотника, соответствующее моменту сопротивления холостому вращению трансмиссии при выключенных передачах КПП, недостаточно для преодоления усилия его пружины. Поэтому этот золотник находится в исходном положении разблокировки МКДС магистралями низкого давления, в том числе и межосевой.. При запуске ДВС с помощью буксировки момент сопротивления холостому вращению элементов трансмиссии и ДВС и соответствующая величина давления в управляющей торцевой полости золотника повышается и золотник переключается в положение блокировки МКДС магистралями низкого давления. В первом случае и в процессе запуска ДВС "постоянно закрытый" золотник находится в исходном положении и блокирует межосевую дифференциальную связь более нагруженных колес переднего и заднего моста. После запуска двигателя давление в управляющей торцевой полости золотника поднимается насосом подпитки, приводимого ДВС, до заданного уровня и золотник перемещается в положение разблокировки МКДС магистралями низкого давления, в том числе и межосевой. Блокировка МКДС магистралями низкого давления позволяет увеличить крутящий момент для запуска двигателя.
Система автоматического управления (САУ) режимами блокировки МКДС при повороте АТС в тяговом режиме ведущих мостов включает датчики и реле давления, датчики углов поворота управляемых колес, частоты вращения колес, перемещения тормозной педали и педали акселератора. Сигналы указанных датчиков в виде аналоговых сигналов поступают на вход электронного вычислительного блока, в котором вычисляются текущие значения расчетной величины θ угла поворота колес, равного, углу поворота условного (эквивалентного) переднего колеса, и его абсолютной величины |θ|, фактической Δωзо и теоретической Δωтеор (без учета буксования и бокового увода колес) для заданного значения |θ| разности частоты вращения передних колес "забегающего" и "отстающего" бортов АТС, разности крутящих моментов ΔМоз этих колес, абсолютной величины заданной теоретической (без учета буксования) скорости поступательного движения |V0|, а также пороговые верхнее Δωmax и нижнее (отрицательная величина) Δωmin значения разности частоты вращения передних колес "забегающего" и "отстающего" бортов АТС. Разность Δωmax представлена функцией двух переменных |V0| и |θ|. Ее коэффициенты определены по данным компьютерного моделирования кругового движения АТС на грунте с различными сочетаниями коэффициентов сцепления и сопротивления качению колес "забегающего" и "отстающего" бортов АТС при предельном буксовании наиболее нагруженного колеса "забегающего" борта, колеса которого движутся в худших условиях в сравнении с колесами "отстающего" борта. Для определения Δωmin использована минимально допускаемая относительная его величина заданная в виде линейной функции от |θ|, с коэффициентами полученными аналогичным образом, но при одинаковых или худших условиях движения колес "отстающего" борта АТС в сравнении с колесами "с забегающего" для тех режимов, когда Δωзо<0. Эти значения Δωmax и Δωmin, а также заданное из условия максимально допустимого буксования "отстающего" переднего колеса пороговое значения разности крутящих моментов ΔM0 передних колес передаются в аналоговой форме электронный блок управления. В этом блоке задаются пороговые значения расчетного угла поворота передних колес, нижнее θ0, при котором включается основной режим самоблокировки с увеличенным гидравлическим сопротивлением дросселя, и верхнее θ1, при котором включается дополнительный режим самоблокировки с уменьшенным гидравлическим сопротивлением. Все указанные пороговые значения сравниваются в электронном блоке управления с фактическими значениями соответствующих переменных. Полученные значения разницы Δω, Δω0, ΔM, Δθ0, Δθ1, а также |V0| с помощью релейных звеньев преобразуются в соответствующие цифровые сигналы, которые посредством логических операций преобразуются в пять управляющих команд включения основного и дополнительного режимов самоблокировки, режима полной блокировки при повороте, режима разблокировки при торможении АТС и режим полной блокировки при разгоне АТС. В нормальных условиях дорожного или внедорожного движения, если все колеса сохраняют сцепление, при θ=θ1 САУ переключает режим основной режим самоблокировки на дополнительный, а при уменьшении до θ=θ0 включается основной режим. Если при повороте управляемых колес на угол θ>θ1 разность частоты вращения передних колес увеличивается вследствие ухудшения условий движения и буксования "забегающих" колес выше заданного порогового значения Δωmax, САУ обратно включает основной режим (с большей "жесткой" самоблокировкой). При малых углах поворота и отрицательной величине разности частоты вращения передних или задних колес из-за ухудшения условий движения колес "отстающего" борта САУ полностью блокирует МКДС.
Рассмотренное устройство |5| обладает рядом серьезных недостатков.
1. Режим самоблокировки МКДС, при котором блокирующий момент пропорционален крутящему моменту, передаваемому ведущим мостом, синхронное вращение колес возможно только до определенной величины блокирующего момента, при превышении которого включается МКДС, в устройстве |5| с его системой управления отсутствует. А в режиме полной блокировки, предусмотренном в устройстве |5|, синхронное вращение колес сохраняется во всем диапазоне изменения блокирующего момента, и поэтому этот режим не эквивалентен упомянутому выше режиму самоблокировки из-за более высокой тяговой и боковой нагрузки "отстающих" колес при повороте АТС..
2. Гидравлический блокирующий механизм на основе дросселей пластинчатого типа не способен бесступенчато изменять свое гидравлическое сопротивление. Ступенчатое изменение гидравлического сопротивления в 5…6 раз не имеет смысла. Как уже было сказано, необходимый диапазон его регулирования весьма ограничен в условиях пониженного сцепления колес, а в условиях дорожного движения более целесообразен вышеупомянутый альтернативный режим самоблокировки. Заменить нерегулируемые пластинчатые дроссели регулируемыми игольчатыми невозможно из-за малой величины потока рабочей жидкости через них, которая не превышает 12…13 л/мин в расчете на каждые 1000 кг весовой нагрузки колеса (и 2000 кг - ведущего моста). В этом случае минимально необходимая площадь проходного сечения дросселя должна снижаться до 0.05-0.03 см2 Да и дистанционное электроуправление игольчатыми дросселями практически не реализуемо.
3. Заявленная в |5| гидравлическая межосевая дифференциальная связь таковой не является. Фактически это межколесная связь более нагруженных колес переднего и заднего ведущих мостов. При равенстве, например, крутящих моментов этих колес в случае разблокировки этой дифференциальной связи (при открытой межосевой магистрали высокого давления) разность передаваемых ведущими мостами крутящих моментов равна не нулю, а половине разности блокирующих моментов МКДС заднего и переднего ведущих мостов. В режиме самоблокировки дифференциальной связи более нагруженных колес переднего и заднего ведущих мостов блокирующий момент, созданный блокирующим механизмом в межосевой магистрали высокого давления не равен блокирующему моменту МОДС, который в данном случае зависит и от блокирующих моментов МКДС ведущих мостов. Кроме того избирательные клапаны в предлагаемых гидравлических блокирующих механизмах ведущих мостов при непрямолинейном внедорожном движении с меняющимися условиями движения "забегающих" и "отстающих" колес будут дополнительным источником пульсации давления в межосевой магистрали высокого давления.
4. Значения расчетного угла поворота колес не могут быть использованы в качестве "пороговых" для формирования управляющих команд перехода от "мягкой" к более "жесткой" характеристике самоблокировки, и обратно, для различных условий дорожного и внедорожного движения. Эти значения сильно отличаются из-за разницы углов бокового увода передних колес при одних и тех же параметрах кругового движения. Нулевое значение расчетного угла поворота колес не может служить признаком прямолинейного движения АТС. При неодинаковых условиях качения и сцепления правых и левых колес и наличии отклоняющего момента в горизонтальной плоскости водитель АТС для сохранения прямолинейности движения вынужден компенсировать действие этого момента небольшим поворотом управляемых колес.
5. При малой кривизне траектории и отрицательной разнице частоты вращения колес "забегающего" и "отстающего" бортов АТС полная блокировка и синхронизация вращения колес приведет лишь к увеличению поворачивающего момента, действующего в горизонтальной плоскости, из-за увеличения абсолютных значении отрицательных блокирующих моментов. В этом случае для стабилизации поворота, наоборот, необходимо предельно возможное по величине буксования переднего колеса "отстающего" борта снижение "жесткости" характеристики самоблокировки, которое невозможно обеспечить без бесступенчатого дистанционного регулирования гидравлического сопротивления гидравлического блокирующего механизма.
6. На основе только данных компьютерного моделирования, полученных для различных условий кругового движения невозможно точно определить пороговые (верхнее и нижнее) значения разности частоты вращения передних колес для формирования управляющих команд. Без применения навигационных датчиков (акселерометров и гироскопа) невозможно обеспечить достаточную адаптацию режимов блокировки МКДС к реальным условиям движения. АТС.
7. Привод одного из двух насосов подпитки от входного вала раздаточной коробки не содержит механизма отключения в случае превышения предельной для насоса частоты вращения. (1500…2500 об/мин). При частоте вращения входного вала раздаточной коробки, например, 2000 об/мин, передаточном отношении главной передачи 5 (у УАЗа), внутреннем передаточном отношении планетарного механизма 5 (близким к верхнему конструктивному ограничению) в зависимости от радиуса качения колес (от 0.35 до 0.4 м, характерном для АТС (4к4)), скорость движения АТС составит примерно 44…50 км/час. Последнее значение соответствует верхнему допустимому значению скорости при аварийной буксировке. Поэтому при более высоких скоростях движения привод этого насоса должен быть отключен. Работа системы подпитки при этом не нарушится, поскольку при работающем двигателе давление подпитки обеспечивается вторым насосом.
8. При портальной схеме ведущих мостов дренажные выводы из корпусов гидромашин расположены существенно ниже резервуара рабочей жидкости, нижнее положение которого ограничено величиной необходимого дорожного просвета. Но отвод внешних утечек рабочей жидкости из корпусов гидромашин не решен.
9. Не предусмотрен отвод утечек из замкнутой внутренней торцевой полости ротора радиально-плунжерных гидромашин и отсутствует двустороннее ограничение положения ротора гидромашин на распределительной цапфе.
Задачами предлагаемого изобретения являются:
- устранение вышеуказанных недостатков механической трансмиссии с гидравлическими самоблокирующимися межосевой и межколесными связями с автоматически управляемыми режимами блокировки |5|;.
- разработка двухрежимной системы самоблокировки межосевой (МОДС) и межколесных (МКДС) гидравлических дифференциальных связей с зависимостью блокирующего момента либо от передаваемого крутящего момента, либо от квадрата разности частоты вращения соответствующих колес АТС на основе электроуправляемого гидравлического клапанного блокирующего механизма для рабочего режима АТС;
- разработка электронной следящей системы дистанционного электроуправления параметрами режимов самоблокировки МКДС и МОДС для рабочего движения АТС;
- разработка системы электронного управления автоматическим включением и отключением полной блокировки и полной разблокировки МКДС и МОДС как при установившемся тяговом режиме движении, так и при разгоне, торможении, аварийной буксировке и запуске первичного двигателя АТС буксировкой,
- разработка алгоритма определения предельной скорости движения и системы сигнализации водителю АТС о ее превышении, о блокированном состоянии МОДС и МКДС в режиме самоблокировки с зависимостью блокирующего момента от передаваемого крутящего момента, а также о нарушении работы электронного управления параметрами самоблокировки.
Технический результат более полная адаптации колесной ходовой системы АТС к различным условиям дорожного и внедорожного движения и улучшение за счет этого функциональных характеристик АТС (4к4): маневренности, проходимости, экономичности и управляемости; а также удобство управления в экстремальных условиях движения и повышение надежности гидравлической системы.
Решение поставленных задач достигается: установкой между рабочими полостями каждой гидромашины и соответствующим золотником реверса электроуправляемого двухпозиционного подпружиненного золотника, который во включенном состоянии перекрывает полости соответствующих гидромашин, обеспечивая их блокировку и полную блокировку МКДС и МОДС; применением для каждого ведущего моста гидравлических блокирующих механизмов МКДС, каждый из которых содержит двухпозиционный электроуправляемый золотник разблокировки МКДС и два последовательно соединенных идентичных гидроуправляемых напорных клапана, включенных между входной и выходной магистралью гидравлического блокирующего механизма, а также электроуправляемый редукционный клапан, вход в который соединен с входной магистралью гидравлического блокирующего механизма, а выход связан с общей магистралью управления напорных клапанов, каждый из которых содержит золотник с двумя осевыми каналами одинакового диаметра, в которых размещены подвижные плунжеры с наружными упорами и внутренним торцевыми полостями, соединенными с входной и выходной магистралью клапана, при этом торцевая полость клапана со стороны более нагруженного плунжера соединена с магистралью низкого давления (давления подпитки), а торцевая полость клапана со стороны менее нагруженного плунжера соединена с магистралью управления и снабжена возвратной пружиной, воздействующей на торец золотника в сторону его закрытия и уравновешивающей при нулевом перекрытии золотника силу давления подпитки на противоположный его торец, при этом магистрали, связывающие между собой напорные клапаны в блокирующих механизмах МКДС передних и задних колес соединены между собой межосевой магистралью высокого давления, в которой установлен подобный упомянутому выше гидравлический блокирующий механизм МОДС, содержащий упомянутые выше двухпозиционный электроуправляемый золотник разблокировки, электроуправляемый редукционный клапан и один гидроуправляемый напорный клапан; применением гидравлической системы подпитки всасывающих полостей гидромашин и отвода внешних утечек гидромашин, один из двух насосов которой, имеющий привод от входного вала раздаточной коробки, снабжен соединительной электромагнитной муфтой с электронным управлением, а сливные магистрали перепускных клапанов насосов подпитки через выпускные обратные клапаны соединены общей сливной магистралью с соплом эжектора, вход в диффузор которого связан с дренажными выходами корпусов гидромашин и гидравлических блоков управления, а выход - с резервуаром рабочей жидкости; соединением замкнутой внутренней полости ротора гидромашин осевым и радиальным каналами выполненными в распределительной цапфе с разгрузочной канавкой на внутренней поверхности ротора, и сквозным радиальным каналом, выполненным в роторе, - с внутренней полостью статора гидромашины; применением электронной системы управления, содержащей датчики давления в магистралях высокого и низкого давления, частоты вращения колес, углов поворота управляемых колес, а также снабженных активными фильтрами низкой частоты гироскопа и двухкомпонентных акселерометров повышенной чувствительности, установленных на продольной оси АТС, например, над точками пересечения ее с передней и задней осью колес, на основе показания которых для автоматического выбора одного из двух режимов самоблокировки в вычислительном блоке вычисляются разница текущих значений кинематических параметров движения АТС - разности частоты вращения соответствующих колес "забегающего" и "отстающего борта АТС, буксования колес "отстающего" борта, коэффициента боковой устойчивости (отношения приращения расчетного угла поворота управляемых колес к приращению угловой скорости поворота) - и заданных пороговых значений, преобразуемой в цифровые сигналы с помощью релейных звеньев с зоной нечувствительности, для формирования управляющей команды, при нулевой величине которой сохраняется исходный режим с пропорциональной зависимостью граничного значения перепада давления в гидравлических блокирующих механизмах, при котором происходит разблокировка гидравлических дифференциальных связей, от суммы перепадов давления в гидромашинах левых и правых колес каждого ведущего моста для МКДС и в гидромашинах всех колес для МОДС, а в случае поворота АТС при условии, что угловая скорость поворота АТС не достигло своего нижнего порогового значения, соответствующего при любой скорости движения АТС граничному значению радиуса поворота АТС, когда кривизной траектории уже можно пренебречь, при достижении верхнего порогового значения буксования "отстающих" колес, либо нижнего нулевого значения разности частоты вращения передних или задних колес "забегающего" и "отстающего" борта АТС, или коэффициента боковой устойчивости АТС при повороте, управляющая команда равна единице и автоматически включается режим самоблокировки с пропорциональной зависимостью текущих значений перепада давления от квадрата разности частоты вращения колес "забегающего" и "отстающего" борта АТС каждого ведущего моста для МКДС и от квадрата разности средних значений частоты вращения передних и задних колес для МОДС, при этом сформированная в вычислительном блоке управляющая команда передается на панель управления и индикации, содержащей световые индикаторы указанных режимов самоблокировки, а также переменные резисторы с джойстиками управления и цифровыми индикаторами, посредством которых задаются параметры самоблокировки - значения коэффициентов пропорциональности упомянутых выше зависимостей регулируемых перепадов давления блокирующих механизмов либо от суммарного перепада давления гидромашин (относительный коэффициент блокировки), либо от квадрата соответствующей разности частоты вращения колес (коэффициент жесткости характеристики самоблокировки), передаваемых в форме аналоговых сигналов в электронной блок управления, содержащий соответственно три замкнутых отрицательными обратными связями контура управления, каждый из которых имеет два, переключаемых с помощью реле в соответствии с величиной указанной выше управляющей командой, и соответствующих двум указанным выше режимам самоблокировки, канала управления, обеспечивающими равенство заданных и фактических значений указанных параметров за счет автоматического регулирования управляющего давления на выходе редукционных клапанов и задаваемого перепада давления напорных клапанов; обеспечивающей на панели управления световую индикацию сигнала предельной для данных условий скорости движения, который определяется в упомянутом выше вычислительном блоке, как логическая сумма указанной выше управляющей команды переключения режима самоблокировки и инверсии логического произведения сигналов верхних пороговых значений углов бокового увода передней и задней оси колес, сигнала верхнего порогового значения давления во входных магистралях гидравлических блокирующих механизмов МКДС на основе сигналов реле давления, включенных в указанные магистрали, сигнала нижнего порогового значения давления в системе подпитки по преобразованному в цифровую форму аналогового сигнала датчика давления в магистрали подпитки, сигнала блокированного состояния МКДС в указанном выше исходном режиме самоблокировки, полученного инверсией логической суммы сигналов отрицательной разницы текущих и заданных граничных значений перепада давления напорных клапанов и нулевого значения указанной выше управляющей команды переключения режимов, сигнала неисправности гидравлических блокирующих механизмов, полученного преобразованием в цифровую форму аналоговой суммы абсолютных значений ошибок регулирования в звеньях сравнения в трех замкнутых контурах управления упомянутого выше электронного блока управления; содержащей блок формирования команд автоматического управления исполнительными механизмами при различных режимах движения АТС на основе преобразованных в цифровую форму аналоговых сигналов датчиков и использования логических операций, обеспечивающих блокировку гидромашин и полную блокировку всех гидравлических дифференциальных связей либо при падении давления в магистрали подпитки до нижнего порогового значения, либо при заданной предельной величине перемещения педали акселератора, если движение АТС - прямолинейное, разблокировку МКДС и МОДС либо при падении давления во входной магистрали, по крайней мере, одного из двух гидравлических блокирующих механизмов МКДС до нижнего порогового значения, либо при заданной предельной величине перемещения тормозной педали, выключение электромагнитной муфты привода насоса подпитки от входного вала раздаточной коробки либо при превышении верхнего порогового значения давления подпитки, либо при превышении верхнего порогового значения частоты вращения входного вала раздаточной коробки.
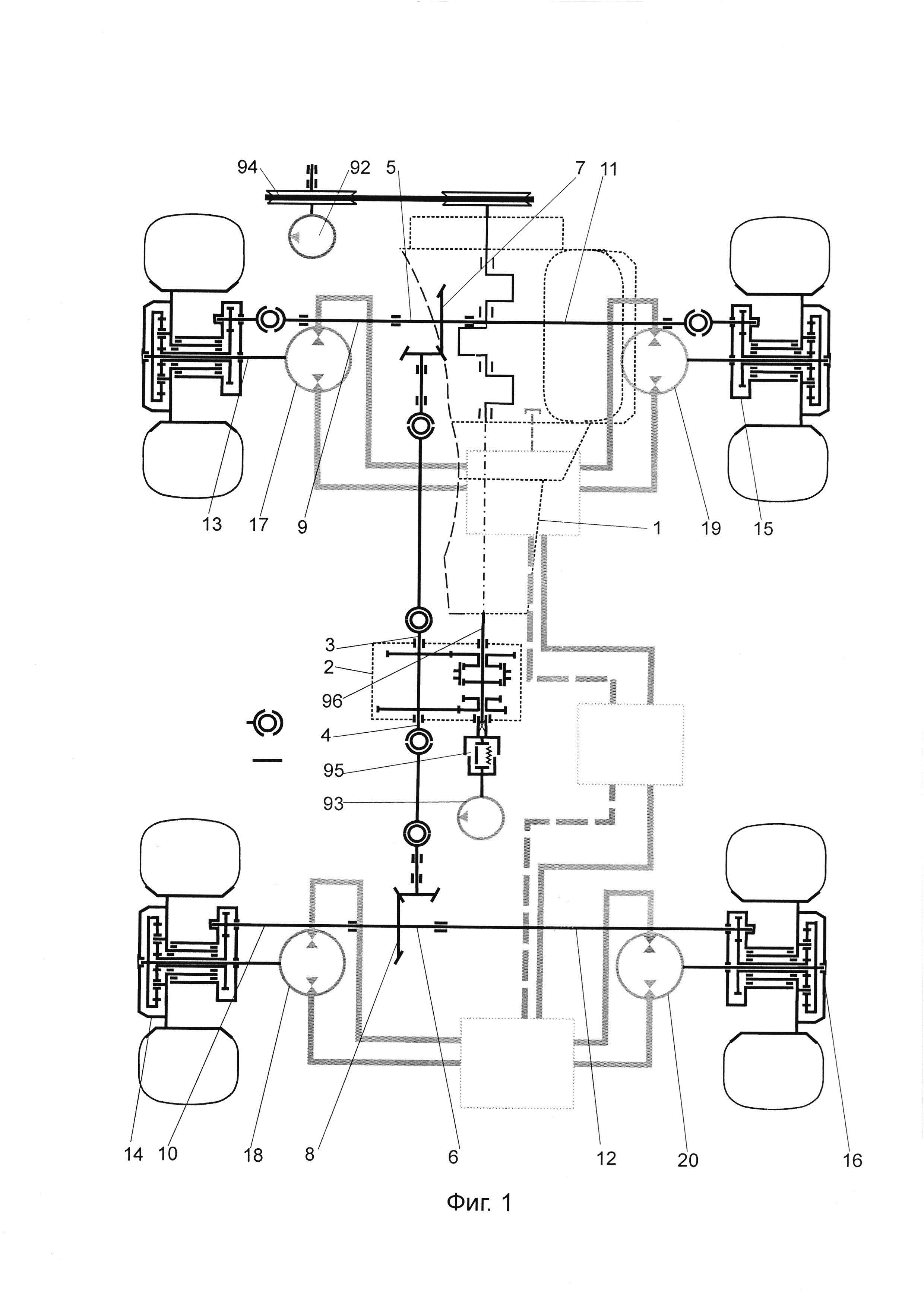
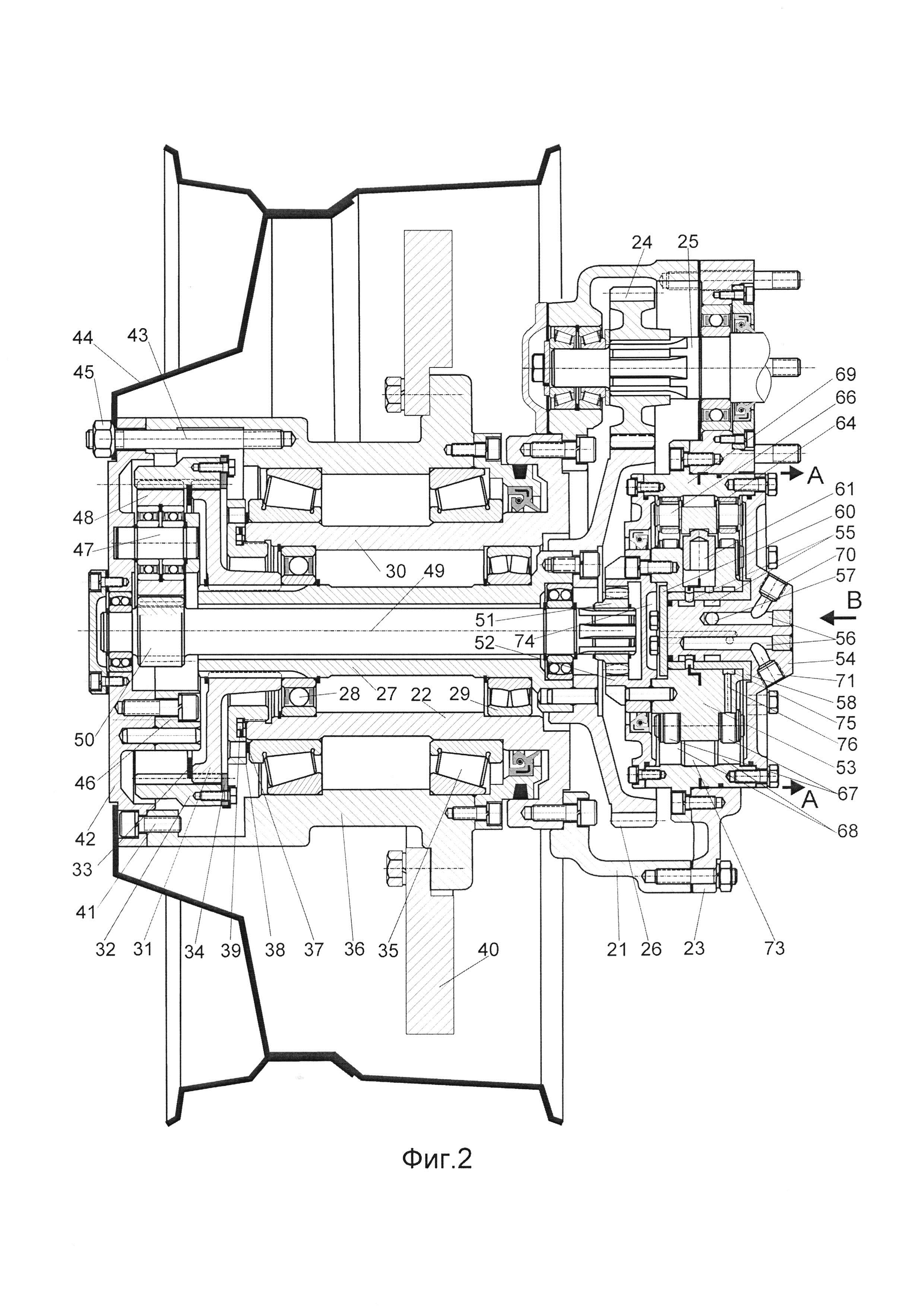
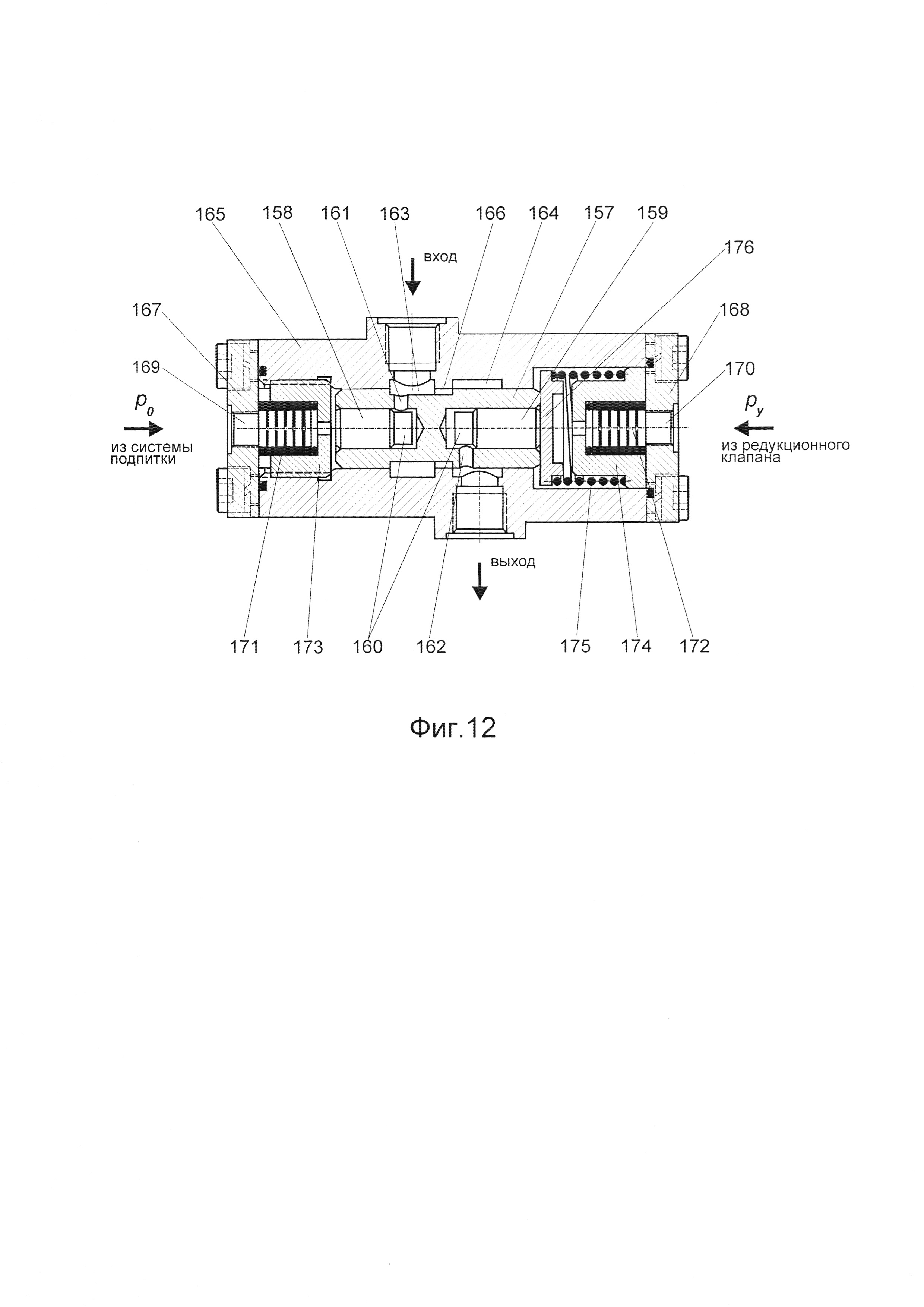
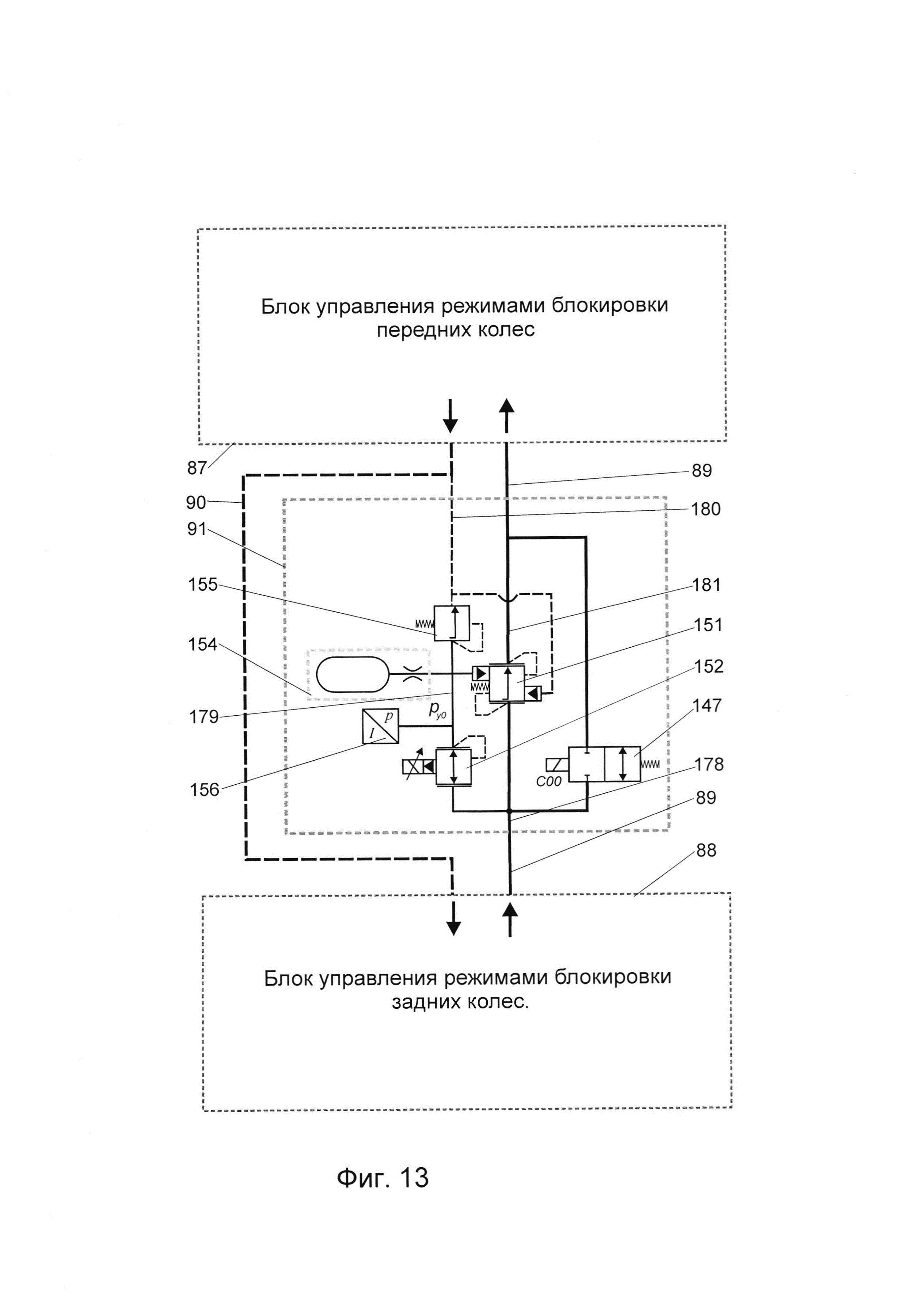
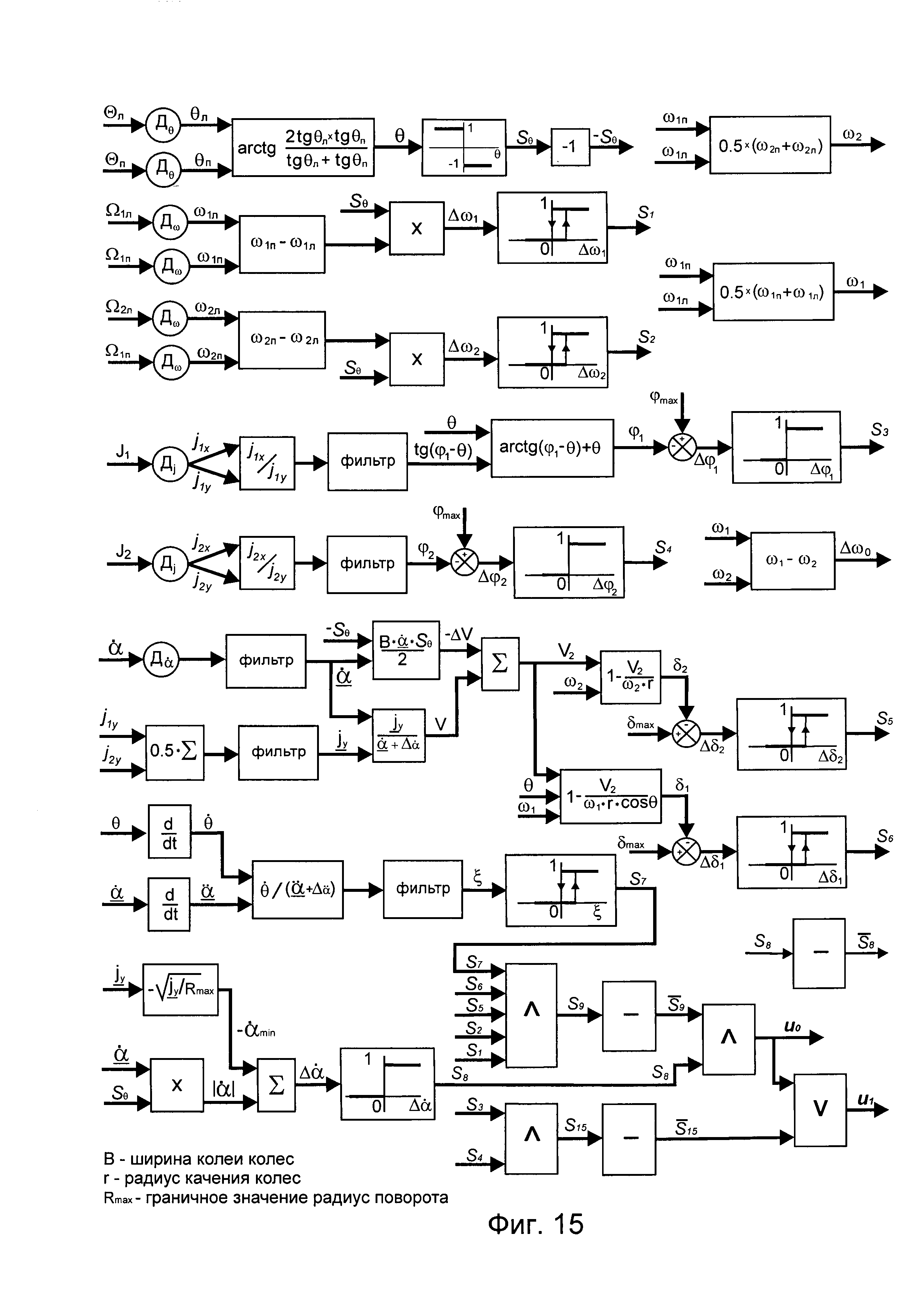
На фиг. 1 представлена кинематическая схема трансмиссии АТС, на фиг. 2, 8 - несоосный колесный редуктор; на фиг. 3, 4, 5, 6, 7 радиально-плунжерная гидромашина постоянного рабочего объема; на фиг. 9 - общая гидравлическая схема системы управляемой блокировки МКДС и МОДС трансмиссии АТС; на фиг. 10 - гидравлическая схема блока управления режимами блокировки МКДС переднего ведущего моста; на фиг. 11 - гидравлическая схема блока управления режимами блокировки МКДС заднего ведущего моста; на фиг. 12 - напорный гидроуправляемый дифференциальный клапан межосевой и межколесной блокировки; на фиг. 13 - гидравлическая схема блока управления режимами блокировки МОДС; на фиг. 14 - блок-схема системы электронного управления режимами и параметрами блокировки гидравлических МКДС и МОДС трансмиссии АТС; на фиг. 15 - функциональная схема электронного вычислительного блока формирования команды автоматического выбора режима самоблокировки и сигнала предельной скорости непрямолинейного движения АТС; на фиг. 16 - принципиальная электрическая схема панели управления режимами и параметрами самоблокировки МКДС и МОДС трансмиссии и их индикации, а также индикации предельного значения скорости движения АТС и контроля за нормальным функционированием системы управления; на фиг. 17 - функциональная схема электронного блока управления выбранными режимом и параметрами самоблокировки гидравлических МКДС и МОДС при рабочем движении АТС; на фиг. 18 - принципиальная схема системы электроуправления исполнительными механизмами и функциональная схема формирования команд для автоматического управления ими в различных режимах движения АТС.
Трансмиссия (фиг. 1) содержит коробку перемены передач - 1, двухступенчатую раздаточную коробку - 2 с передним - 3 и задним выходом - 4, ведущие мосты передний - 5 и задний - 6 с ведомыми шестернями - 7 и 8 главных передач, связанными жестко с полуосями - 9, 10, 11 и 12, несоосными колесными редукторами - 13, 14, 15 и 16 и гидромашинами - 17, 18, 19 и 20 радиально-плунжерного типа. Колесные редукторы состоят из двух частей: внутренней и наружной. Внутренняя неподвижная часть колесных редукторов (фиг. 2, 3) (без элементов подвески) содержит корпус - 21, жестко связанный со ступицей - 22, и крышку - 23. В этой части колесных редукторов размещена входная цилиндрическая пара шестерен: ведущая - 24 на входном валу - 25, соединенного с соответствующей полуосью ведущего моста, и ведомая - 26, которая жестко связана с фланцем трубчатого ведомого вала - 27, установленного на подшипниках, шариковом - 28 и роликовом сферическом двухрядном - 29 внутри неподвижной ступицы - 30. На внутреннем шлицевом хвостовике ведомого вала - 27 закреплена зубчатая полумуфта - 31 с эвольвентным профилем наружных зубьев, количество и размер которых такой же, как и у коронной шестерни - 32 планетарного механизма, и которыми полумуфта сопрягается с внутренними зубьями последней. При этом в осевом направлении коронная шестерня - 32 фиксируется стопорным кольцом - 33 и кольцом 34. На наружной поверхности ступицы - 22 на радиально-упорных подшипниках - 35 установлена вращающаяся ступица - 36 колеса, являющаяся наружной подвижной частью колесного редуктора. Регулировка осевого зазора подшипников - 35 осуществляется набором прокладок - 37, которые установлены между внутренним кольцом подшипника и гайкой - 38 со стопорной шайбой - 39. На ступице - 36 закреплен тормозной диск - 40. К торцу ступицы - 36 с помощью болтов - 41 пристыкована наружная часть - 42 корпуса водила планетарного механизма, которая одновременно выполняет роль крышки ступицы - 36. Одновременно с крепежными болтами - 41 в торец ступицы ввернуты шпильки - 43 для крепления колесного диска - 44 с помощью гаек - 45. Наружная часть - 42 корпуса водила жестко с помощью болтов и штифтов соединена с его внутренней частью - 46. В цилиндрических расточках последней на осях - 47 и сдвоенных шариковых подшипниках установлены три сателлита - 48. Внутри трубчатого вала - 27 на сферических двухрядных шарикоподшипниках, установлен вал - 49, выполненный заодно с солнечной шестерней - 50. Наружный подшипник вала - 49 размещен в сквозной цилиндрической расточке наружной части - 42 корпуса водила, а внутренний - в цилиндрической расточке фланца трубчатого вала - 27. Шлицевой хвостовик вала - 49 с помощью зубчатых полумуфт, ведущей - 51 и ведомой - :52, соединен с ротором - :53 радиально-плунжерной гидромашины. Ротор - 53 (фиг. 2, 3, 4, 5, 6) вращается на неподвижной распределительной цапфе - 54, выполненной заодно с крышкой корпуса гидромашины, снабженной двумя кольцевыми наружными проточками - 55, осевыми - 56 и радиальными - 57 каналами для подвода и отвода рабочей жидкости, и бронзовой втулки - 58 с радиальными каналами - 59. При этом втулка - 58 наряду с функцией распределения рабочей жидкости выполняет роль подшипника скольжения для вращающегося ротора - 53. Осевая фиксация ротора на цапфе обеспечивается опорным кольцом - 60. В роторе - 53 в радиальных расточках расположены семь (в данном исполнении) подпружиненных (пружины не показаны) плунжеров - 61 (фиг. 3). Рабочие полости - 62 плунжеров соединены с радиальными каналами - 59 распределительной цапфы отверстиями - 63. Плунжеры - 61 наружными торцами упираются в подвижные в радиальном направлении ползуны - 64, установленные в наружных продольных радиальных пазах - 65 ротора - 53. Ползуны - 64 снабжены цилиндрическими хвостовиками - 66, на которых установлены опорные ролики - 67 с игольчатыми подшипниками, контактирующие с направляющими - 68 неподвижного статора - 69, прифланцованного к крышке редуктора - 23. Осевые каналы - 56 цапфы связаны с резьбовыми отверстиями - 70 и 71 (фиг. 2, 8) для штуцеров (на фиг. 2 и 8 не показаны) соединительных магистралей между гидромашинами и гидравлическим блоком управления режимами блокировки соответствующего ведущего моста. Там же выполнено резьбовое отверстие - 72 для отвода внешних утечек рабочей жидкости из внутренней полости статора - 73 в дренажную магистраль - 109 (фиг. 9).. Чтобы избежать повышения давления в замкнутой внутренней торцевой полости - 74 ротора и осевой нагрузки ротора, на внутренней поверхности ротора - 53 выполнена разгрузочная канавка - 75 и радиальный канал - 76, соединяющей ее с внутренней полостью - 73 статора, а в цапфе - открытый с торца осевой канал - 77 и соединенный с ним радиальный канал - 78, которые постоянно соединяют эту замкнутую полость - 74 с внутренней полостью статора и дренажным отверстием - 72..
Посредством трубопроводов - 79, 80, 81, 82 гидромашины - 17, 19 переднего ведущего моста (фиг. 9) и трубопроводов - 83, 84, 85, 86 гидромашины - 18, 20 заднего ведущего моста соединены с входными магистралями соответствующих гидравлических блоков - 87, 88 управления режимами блокировки МКДС переднего и заднего ведущих мостов. Выходы гидравлического блока - 88 и входы гидравлического блока - 87 соединены между собой межосевыми магистралями - 89 (высокого давления) и 90 (низкого давления) с гидравлическим блоком - 91 управления режимами блокировки МОДС.
Для восполнения внешних утечек рабочей жидкости в гидромашинах и поддержания в их всасывающих полостях небольшого (р0=0-5 МПа) избыточного давления трансмиссия оснащена системой подпитки. Эта система содержит два шестеренных гидронасоса - 92 и 93 (фиг. 1, 9). Основной гидронасос - 92, приводится от первичного двигателя, например, клиноременной передачей - 94, дополнительный гидронасос - 93 посредством электромагнитной муфты - 95 приводится от входного вала - 96 раздаточной коробки, имеющего постоянную кинематическую связь с ведущими колесами АТС. Нагнетательные магистрали - 97, 98 насосов подпитки через впускные обратные клапаны - 99 соединены с общей магистралью подпитки - 100. Эта магистраль связана с соответствующими входами в гидравлические блоки - 87, 88 управления режимами блокировки МКДС. Давление в нагнетательных магистралях - 97, 98 и магистрали подпитки - 100 ограничивается перепускными клапанами - 101, 102 с одинаковой настройкой (0.5 МПа). Сливные магистрали этих клапанов снабжены впускными обратными клапанами - 103 и соединены с общей сливной магистралью - 104 насосов подпитки. По этой магистрали рабочая жидкость через фильтр - 105 и теплообменник - 106 поступает в сопло эжектора - 107 и через него сливается в резервуар - 108. Диффузор эжектора - 107 соединен общей дренажной магистралью - 109 с дренажными выходами - 72 (фиг. 8) гидромашин и гидравлических блоков - 87, 88 и 91. Благодаря разряжению в диффузоре рабочая жидкость из этой магистрали поступает через диффузор эжектора - 107 в резервуар - 108.. Для измерения текущих значений давления p0 подпитки к общей магистрали подпитки - 100 присоединен датчик давления - 110.
Выше упомянутые трубопроводы - 79, 80,81, 82 гидромашин передних колес (фиг. 9) и трубопроводы - 83, 84, 85, 86 гидромашин задних колес соединены с соответствующими входными магистралями - 111, 112, 113, 114 (фиг. 10) гидравлического блока - 87 управления режимами блокировки МКДС передних колес и входными магистралями - 115, 116, 117, 118 (фиг. 11) гидравлического блока - 88 управления режимами блокировки МКДС задних колес. Входные магистрали низкого давления с помощью впускных обратных клапанов - 119 соединяются с магистралью подпитки - 100, если давление в них ниже, чем в этой магистрали, а входные магистрали высокого давления с помощью выпускных обратных клапанов - 120 соединяются с предохранительными клапанами - 121, ограничивающими заданное пороговое значения (30-32 МПа) давления в этих магистралях.
Входные магистрали - 111, 112, 113, 114 (фиг. 10) гидравлического блока - 87 связаны с входами последовательно соединенных электроуправляемых двухпозиционных подпружиненных золотников - 122, 123 блокировки и 124, 125 реверса гидромашин передних колес. А входные магистрали - 115, 116, 117, 118 (фиг. 11) гидравлического блока - 88 связаны с входами аналогичных золотников - 126, 127 блокировки и 128, 129 реверса гидромашин задних колес. В тяговом режиме движения и выключенном положении (при обесточенных управляющих соленоидах) этих золотников выходы - 130, 131 золотников - 124, 125 реверса и 132, 133 золотников - 128, 129 связаны с нагнетательными рабочими полостями соответствующих гидромашин и являются выходами высокого давления. (На это не влияет изменение направления движения, поскольку при включении передачи КПП заднего хода одновременно происходит и включение всех золотников реверса). А выходы - 134, 135 (фиг. 10) и 136, 137 (фиг. 11) связаны либо с всасывающими, либо со сливными рабочими полостями соответствующих гидромашин и являются выходами низкого давления. Эти выходы в гидравлических блоках - 87, 88 управления режимами блокировки МКДС соединены между собой магистралями - 138 (фиг. 10), 139 (фиг. 11), которые, в свою очередь, связаны межосевой магистралью - 90 низкого давления.
Гидравлические блоки - 87, 88 управления режимами блокировки МКДС содержат гидравлические блокирующие механизмы - 140 клапанного типа с электроуправлением. Выходы высокого давления - 130, 131 (фиг. 10) и 132, 133 (фиг. 11) золотников реверса посредством соответствующих магистралей - 141, 142 с выпускными обратными клапанами -143 соединены с входными магистралями - 144 гидравлических блокирующих механизмов - 140. При одинаковом давлении рабочей жидкости в нагнетательных полостях гидромашин и в магистралях - 141, 142. обратные клапаны закрыты и поток рабочей жидкости между нагнетательными полостями гидромашин отсутствует. Роторы - 53 гидромашин застопорены А при неодинаковом давлении в магистралях - 141, 142 в гидравлических блоках - 87 (фиг. 10), 88 (фиг. 11) управления магистрали с более высоким давлением р1вх, р2вх соединяются соответствующими обратными клапанами - 143 с входными магистралями - 144 гидравлических блокирующих механизмов. А выходные магистрали - 145 последних соединяются соответствующими обратными клапанами - 146 с магистралями - 141, 142 с более низким давлением р1вых, р2вых. И если разница р1вх - р1вых или р2вх - р2вых превышает заданные в гидравлических блокирующих механизмах перепады давления, то рабочая жидкость от более нагруженных гидромашин через гидравлические блокирующие механизмы поступает в менее нагруженные гидромашины При этом более нагруженные гидромашины работают в режиме гидронасосов, а менее нагруженные - в режиме гидромоторов и их роторы - 53 (фиг. 2) вращаются в противоположном направлении В противном случае гидравлические блокирующие механизмы заперты, циркуляция рабочей жидкости между гидромашинами отсутствует, роторы гидромашин - 53 застопорены.
Для разблокировки гидравлических блокирующих механизмов - 140 предназначены электроуправляемые двухпозиционные двухходовые золотники - 147, которые обеспечивают этот режим в выключенном положении (при обесточенном управляющем соленоиде), посредством соединения между собой входной - 144 и выходной магистрали - 145. К входным магистралям - 144 для сигнализации верхнего и нижнего пороговых значений давления подключены реле давления - 148, 149, для гидромашины более нагруженного переднего колеса - РД-11 и РД-12, для гидромашины более нагруженного заднего колеса - РД-21, РД-22. Кроме того, к входным - 144 и выходным магистралям - 145 подключены датчики - 150 давления.
Входная магистраль - 144 в гидравлических блоках - 87, 88 связана с двумя последовательно соединенными гидроуправляемыми напорными клапанами - 151, каждый из которых поддерживает половину необходимого перепада давления, а также с входом электроуправляемого редукционного клапана - 152. На выходе последнего в магистрали управления - 153 управляющее давление (py1 - для гидравлического блокирующего механизма МКДС передних колес и ру2 - для гидравлического блокирующего механизма МКДС задних колес) автоматически изменяется в соответствии с необходимой величиной перепада давления Δр1 и Δр2 напорных клапанов. К магистрали управления - 153 подключен демпфер - 154, содержащий последовательно соединенные дроссель и гидроаккумулятор небольшой емкости, для снижения пульсации давления, а также предохранительный клапан - 155, ограничивающий давление в магистрали управления в случае неисправности редукционного клапана - 152. Кроме того, к этой магистрали подключен датчик - 156 давления.
Напорный гидроуправляемый клапан - 151 (фиг. 12) содержит двухходовой золотник - 157, с двумя внутренними осевыми каналами одинакового диаметра, в которых размешены подвижные управляющие плунжеры - 158, 159 с упорами - 160 на внутренних торцах, ограничивающих их перемещение внутри золотника. Внутренние торцевые полости этих плунжеров с помощью радиальных отверстий - 161, 162 в золотнике постоянно связаны с входной и выходной полостями - 163 и 164 золотника. Они выполнены в виде кольцевых расточек в корпусе - 165 клапана и разделены кольцевой перемычкой - 166. Торцевые полости корпуса - 165 закрыты крышками - 167, 168 с резьбовыми отверстиями - 169, 170 для подвода рабочей жидкости из магистрали подпитки - 100 и магистрали управления - 153, соответственно. В этих полостях размещены дроссельные демпферы - 171, 172 пластинчатого типа для гашения высокочастотных колебаний золотника - 157. Гильзы - 173, 174 этих демпферов ограничивают перемещение золотника - 157 и его управляющих плунжеров - 158, 159. В торцевой полости корпуса, связанной с магистралью управления, размещена предварительно сжатая пружина -175, которая взаимодействует с торцами золотника - 157 и управляющего плунжера - 159 через цилиндрическую проставку - 176. Размеры пружины - 175 и диаметры золотника - 157 и управляющих плунжеров - 158, 159 подобраны таким образом, что при нулевом перекрытии кольцевой щели, соединяющей между собой полости - 163 и 164, усилие пружины уравновешивает силу давления подпитки р0 рабочей жидкости на кольцевую торцевую поверхность золотника с противоположной стороны, наружный диаметр которой равен диаметру золотника, а внутренний - диаметру управляющего плунжера. В этом случае поддерживаемый напорным дифференциальным клапаном перепад давления примерно пропорционален давлению рабочей жидкости в магистрали управления - 153. А коэффициент пропорциональности Kнк этой зависимости является коэффициентом передачи напорного клапана. В режиме перепуска рабочей жидкости через кольцевую щель, соединяющую рабочие полости - 163 и 164, золотник смещен вправо за счет дополнительного сжатия возвратной пружины - 175 и увеличения перепада давления, тем большего, чем выше расход рабочей жидкости.
Этот клапан в зависимости от режима блокировки может находиться в трех состояниях. В запертом положении золотник - 157 полностью перекрывает кольцевую щель между входной - 163 и выходной - 164 полостью. При отключении электроуправления золотник полностью открывает кольцевую щель между этими полостями. При малой ширине кольцевой щели золотник обеспечивает перепуск рабочей жидкости с заданным перепадом давления.
Давление рвх на входе в напорный клапан из-за механических потерь в более нагруженной и работающей в насосном режиме гидромашине меньше теоретического значения, равного 2π*Мк/q, где Мк - крутящий момент колеса, a q - рабочий объем гидромашины. А давление рвых на выходе из напорного клапана из-за механических потерь в менее нагруженной и работающей в моторном режиме гидромашине, наоборот, больше указанного выше теоретического значения. Поэтому фактическая величина перепада давления напорного клапана будет меньше теоретической, равной ΔМк*(2π/q), где ΔМк величина блокирующего момента. Эта разница примерно равна сумме механических потерь в обеих гидромашинах. Таким образом, коэффициенты блокировки МОДС и МКДС будут несколько ниже фактических значений. Это не имеет практического значения в связи с возможностью бесступенчатого регулирования коэффициентов блокировки.
При одинаковой настройке напорных клапанов в магистрали - 177 (фиг. 10, 11), соединяющей выход из первого напорного клапана с входом во второй напорный клапан, давление рабочей жидкости равно средней величине давления


Блок-схема многорежимной системы электронного управления (СЭУ) параметрами самоблокировки МОДС и МКДС АТС в различных условиях движения представлена на фиг. 14. СЭУ позволяет адаптировать к этим условиям задаваемое распределение крутящих моментов на ведущих колесах АТС как при прямолинейном, так и непрямолинейном движении, в тяговом режиме колес, в т.ч. разгоне АТС, или движении "накатом" и торможении. При непрямолинейном движении в тяговом режиме в зависимости от условий движения СЭУ обеспечивает один из двух режимов самоблокировки МКДС и МОДС, а при прямолинейном только один режим.
Режим 1 включен в исходном состоянии системы управления. При прямолинейном движении он используется постоянно, а при непрямолинейном - наряду с режимом 2. В режиме 1 задается постоянная величина отношения граничных значений перепадов давления (р1вх - рвых) и (р2вх - р2вых) гидравлических блокирующих механизмов МКДС, при превышении которых начинается перепуск рабочей жидкости в напорных клапанах, и соответствующих текущих значений суммарного перепада давления Σp1=р1вх+р1вых-2р0, Σp2=р2вх+р2вых-2р0 в гидромашинах ведущих мостов, а также отношения аналогичного граничного значения перепада давления (р20-р10) в межосевом гидравлическом блокирующем механизме МОДС и суммы текущих значений перепадов давления Σр0=Σp1+Σp2 в гидромашинах всех ведущих колес. При меньших текущих значениях перепадов давления относительно граничных значений левые и правые колеса вращаются синхронно, а отношение средних значении частоты вращения передних и задних колес равно заданному коэффициенту кинематического несоответствия межосевого привода. При превышении заданных граничных значений жесткая кинематическая связь колес заменяется дифференциальной. Указанные выше заданные отношения примерно соответствуют относительной величине коэффициентов блокировки МКДС передних и задних колес и МОДС, равных отношению соответствующих блокирующих моментов и передаваемых крутящих моментов колес, и являются параметрами этого режима самоблокировки.
Режим 2 используется только при непрямолинейном движении и включается автоматически в более сложных условиях движения, в том числе при внедорожном движении, и переключается на режим 1 также автоматически. В режиме 2 задается постоянная величина отношения текущих значений перепадов давления Δр1, Δр2 гидравлических блокирующих механизмов МКДС передних и задних колес и квадратов разности соответствующих значений частоты вращения левых и правых колес, а также отношения текущего значения перепада давления Δр0 межосевого гидравлического блокирующего механизма и квадрата разности средних значений частоты вращения передних и задних колес. Эти отношения примерно соответствует значениям указанного выше коэффициента С жесткости характеристики самоблокировки и являются параметрами этого режима самоблокировки.
Предусмотрено дублирование автоматического переключения режимов самоблокировки кнопочным ручным переключением.
СЭУ включает датчики давления - 150 (фиг. 10, 11) в входных и выходных магистралях гидравлических блокирующих механизмах МКДС передних и задних колес - р1вх, р1вых, р2вх, р2вых; датчик давления - 110 (фиг. 9) в системе подпитки - р0; датчики давления - 156 в магистралях управления - 179 (фиг. 13) ру0 и 153 (фиг. 10, 11) ру1, ру2 гидравлических блокирующих механизмов МОДС и МКДС; датчики - 182 (фиг. 14) частоты вращения передних и задних колес ω1л,



При прямолинейном движении АТС скорость и ускорение его угловых отклонений равно нулю. В этом случае в формулах расчета фактической скорости V движения и коэффициента ξ имеет место неопределенность 0/0. Чтобы избежать ее, в знаменатели этих формул добавлены не влияющие практически на результаты расчетов слагаемые - постоянные и малые значения (0.002…0.005 рад/с и 0.02…0.05 рад/с2) угловой скорости и углового ускорения поворота АТС. При этом расчетные значения V, ΔV и ξ равны нулю, а буксования "отстающих колес" - единице. Это не имеет значения, поскольку для прямолинейного движения, как уже было сказано, буксование не вычисляется. Определение пороговых значений буксования актуально при непрямолинейном, в основном, внедорожном движении. На деформируемом грунте при пониженном сцеплении колес прямолинейное движение в чистом виде отсутствует из-за постоянных угловых отклонений АТС. Чтобы зафиксировать характер движения, прямолинейный или непрямолинейный, и связанный с ним выбор режима самоблокировки, введено нижнее пороговое значение скорости этих угловых отклонений (dα/dt)min=(0.5*(jy1+jy2)/Rmax)0.5, где Rmax - граничное значение радиуса поворота, при больших значения которого можно пренебречь кривизной траектории движения АТС, равное примерно 350…450 м. При более высоких значениях угловой скорости движение рассматривается, как непрямолинейное, а при меньших значениях - как прямолинейное. Разность текущего и нижнего порогового значения угловой скорости поворота посредством релейного звена преобразована в цифровой сигнал S8, при прямолинейном движении равный нулю, а при непрямолинейном - единице.
Рассчитанные кинематические параметры движения Δω1, Δω2, ϕ1, ϕ2, δ1, δ2, ξ посредством релейных звеньев из аналоговых преобразуются в цифровые сигналы S1…S7. При этом для преобразования Δω1, Δω2, ξ, δ1, δ2 используются релейные звенья с зоной нечувствительности. При достижении пороговых значений указанных параметров соответствующие цифровые сигналы равны нулю. При пороговых значениях разницы частоты вращения 'забегающих" и "отстающих" колес одной из осей АТС, либо буксования по крайней мере одного из двух "отстающих" колес, либо коэффициента ξ логическое произведение соответствующих цифровых сигналов (S1^S2^S5^S6^S7)=S9=0. После перемножения "инверсии" S9 с сигналом S8.=1 (при повороте АТС) управляющий сигнал u0=1. В этом случае включается режим 2. Обратное включение режима 1 при S9=1 происходит с задержкой, вызванной наличием указанной выше зоны нечувствительности релейного звена. Режим 1 включается как только кинематический параметр, достигший своего порогового значения и вызвавший включение режима 2, не снизится относительно своего порогового значения, например, на 10…15% для параметров δ1, δ2. А для параметров Δω1, Δω2, ξ с нижним нулевым пороговым значением режим 1 включится, как только параметр, снизившийся до нуля не увеличится, например, на 10…15% от своей максимальной положительной величины. Это позволяет исключить "зацикливание" системы управления в области пороговых значений указанных выше аналоговых параметров. Обратное включение режима 1 происходит также и при выходе АТС из поворота, при S8=0.
Подобным образом, в результате логического перемножения сигналов (S3^S4)=S15 и логического суммирования "инверсии" S15 с управляющим сигналом u0 формируется выходной сигнал: - u1. При u1=1 фиксируется предельно допустимая для данных условий окружная скорость Vlim движения при повороте АТС.
Управляющий сигнал u0 передается на панель управления и индикации - 191 (фиг. 16). Управляющая часть панели управления и индикации содержит усилители, в т.ч. усилитель - 192 входного управляющего сигнала - u0. Усиленный сигнал U0 подается на вход управляющего реле - 193 с двумя контактами, постоянно замкнутым K01 и постоянно разомкнутым K02, а также в блок электронного управления - 194 (фиг. 17) на входы управляющих реле - 195, 196, 197, 198 с аналогичными контактами.. Ручная кнопка Ky1 с замыкающим контактом дублирует сигнал U0 автоматического управления переключением двух режимов самоблокировки. При включении этой кнопки режим 1 заменяется режимом 2. Включение режимов самоблокировки индицируется световыми индикаторами зеленого цвета Л01 (режим 1) и Л02 (режим 2)..
Сигнал u1 передается на вход усилителя - 199 панели управления (фиг. 16). При u1=1 на вход управляющего реле - 200.с постоянно разомкнутом контактом K1 поступает усиленный сигнал U1. Контакт замыкается, включается световой красный индикатор Л1 - сигнал Vlim предельно допустимой для данных условий скорости движения при повороте АТС.
Панель управления и индикации содержит переменные резисторы - 201, посредством которых задаются аналоговые параметры режимов самоблокировки I0 и I1 МОДС и МКДС, которые индицируются цифровыми миллиамперметрами - 202. Для режима 1 I0, I1 - относительная величина коэффициентов блокировки МОДС и МКДС, а для режима 2 - коэффициент жесткости характеристики самоблокировки МОДС и МКДС.
Указанные аналоговые параметры передаются в блок электронного управления - 194. Он предназначен для автоматического поддержания заданных параметров I0 и I1 и содержит три замкнутых обратными отрицательными связями контуры "0", "1", "2" управления (фиг. 17) величиной I0 для МОДС и I1 для МКДС передних и задних колес. Каждый контур имеет два канала управления, для режима 1 и режима 2. Применение замкнутой следящей системы управления вместо более простой разомкнутой системы имеет целью повысить стабильность заданных параметров. В режиме 1 - за счет автоматической компенсации возмущающего воздействия изменения разности частоты вращения левых и правых колес АТС на величину перепадов давления в гидравлических блокирующих механизмах при наличии МКДС. А в режиме 2 - за счет автоматической компенсации возмущающего воздействия изменения тяговой нагрузки колес и гидромашин на величину разности частоты вращения левых и правых колес АТС..
В режиме 1 величина управляющего давления ру1к, ру2к и ру0к на выходе редукционных клапанов - 152 и соответствующего перепада давления Δр1к, Δр2к, Δр0к напорных клапанов - 151 (фиг. 12) задается из условия равенства последнего произведению заданной величины параметров I1, I0 и суммарного перепада давления соответствующих гидромашин Σp1, Σр2 и Σр0. Индекс "к" в обозначениях указанных параметров соответствует нулевому перекрытию золотниками - 157 кольцевых щелей между входной - 163 и выходной - 164 полостями напорных клапанов. При такой настройке клапанов золотники - 157 перекрывают доступ рабочей жидкости из входной - 163 в выходную - 164 полость до тех пор пока фактическая разница давления на входе и выходе напорных клапанов не превысит заданные значения Δр1к, Δр2к, Δр0к, которые являются граничными, разделяющими два состояния напорных клапанов. Признаком состояния напорных клапанов является знак разницы δр1, δр2 и δр0 фактических и заданных (граничных) значений перепадов давления в напорных клапанах и соответствующая дискретная величина коэффициентов Sδ1, Sδ2, Sδ0 (0 или 1), полученных на выходе релейных звеньев - 203. Сигналы Sδ1, Sδ2 передаются на панель управления и индикации - 191 (фиг. 16) в блок - 205 для формирования светового сигнала блокированного состояния межколесных дифференциальных связей трансмиссии в режиме 1..
В первом случае (Sδ=0) изменение тяговой нагрузки колес и величины суммарного перепада давления соответствующих гидромашин Σp1, Σр2 и Σр0 благодаря обратным связям по величине управляющего давления ру1к, ру2к и ру0к граничные значения Δр1к,Δр2к, Δр0к непрерывно корректируются, обеспечивая постоянство заданных параметров I1, I0.. При этом входные магистрали - 89 (фиг. 13) и 144 (фиг. 10, 11) гидравлических блокирующих механизмов перекрыты, МОДС и МКДС - блокированы.
Во втором случае (Sδ=1) при превышении фактическими значениями граничных значений перепада давления и под действием соответствующей разницы давления на торцах управляющих плунжеров - 158, 159 золотник - 157 перемещается вправо, обеспечивая перепуск рабочей жидкости в выходную полость - 164. Это перемещение сопровождается сжатием возвратной пружины - 175 золотников и дополнительным, сверх Δр1к, Δр2к и Δр0к, увеличением перепадов давления Δр1к, Δр2к и Δр0к на величину δp1, δр2 и δр0, и управляющего давления, сверх ру1к, ру2к и ру0к, на соответствующую величину δру1, δру2 и δру0. Величина δр1, δр2 и δр0 зависит от жесткости возвратных пружин - 175 и диаметра кольцевой щели золотников - 157 и является причиной статической ошибки в величине регулируемого перепада давления напорных клапанов при перепуске рабочей жидкости.
При отрицательной величине перепада давления Δр0 в напорном клапане - δр0<0. Как было выше сказано, золотник - 157 напорного клапана - 151 (фиг. 12) при этом перекрывает кольцевую щель между полостями 163 и 164, блокируя МОДС. Это устраняет дестабилизирующее влияние дифференциальной межосевой связи на боковую устойчивость непрямолинейного движения АТС на повышенной скорости и при малой кривизне траектории, когда благодаря смещению полюса поворота к передней оси колес средняя скорость движения задних колес начинает превышать среднюю скорость передних. В этом случае задние колеса - "отстающие", их тяговая нагрузка снижается, а запас сцепления и предельная величина сопротивления боковому уводу возрастает.
Общее для двух рассматриваемых состояний напорных клапанов выражение фактических значений I1(1) и I0(1) в обратных связях трех контуров управления имеет вид:
I1(1)=(2*ру1к*Кнк+δp1*Sδ1)/Σp1; I1(1)=(2*ру2к*Кнк+δp2*Sδ2)/Σр2;
I1(1)=(2*ру0к*Кнк+δp0*Sδ0)/Σp0. Выражения в скобках равны фактической величине перепада давления напорных клапанов при перепуске рабочей жидкости в выходную полость - 164. При этом коэффициент 2 учитывает наличие двух напорных клапанов в блокирующих механизмах МКДС.
Таким образом, если при Sδ=0 функционируют обратные связи по управляющему давлению редукционного клапана, то при Sδ=1 - по перепаду давления напорного клапана.
В режиме 2 отрицательные обратные связи по величине I1 и I0 формируется на основе текущих значений перепадов давления Δр1(2), Δр2(2) и Δр0(2) между входной - 163 и выходной полостью - 164 соответствующих напорных клапанов - 151 (фиг. 12) при перепуске рабочей жидкости из входной полости в выходную. Фактические значениями параметров I1(2), I2(2)) в обратных связях, рассчитываются, как соотношения текущих значений указанных перепадов давления и квадратов разности частоты вращения передних - Δр1(2)/Δω12 и задних - Δр2(2)/Δω22 колес АТС для контуров "1", "2" управления МКДС и квадрата разности средних значений частоты вращения передних и задних колес Δр0(2)/Δω02 для контура "0" управления МОДС.
При отрицательной величине перепада давления Δр0 золотник - 157 напорного клапана - 151 (фиг. 12), как и при рассмотренном выше режиме 1, блокирует МОДС.
Использование замкнутых контуров управления позволяет не только повысить точность дистанционного управления параметрами I0 и I1, но и при неравенстве нулю текущих значений ΔI0, ΔI1 и ΔI2 своевременно зафиксировать неисправность системы управления, Для ее индикации формируется сумма абсолютных значений ошибок регулирования в контурах управления. Чтобы исключить при этом случаи блокированного состояния МОДС в режимах 1 и 2 при отрицательной величине перепада давления, в напорном клапане введены параметры S0(1) и S0(2), являющиеся выходными сигналами релейных звеньев - 203. При отрицательном перепаде давления в межосевой магистрали - 89 эти параметры равны нулю, а при положительном равны единице. И признаком неисправности в контуре управления блокирующего механизма МОДС является S0(1)*ΔI0(1)>0 и S0(2)*ΔI0(2)>0. Сумма абсолютных значений Σ|ΔI|=|ΔI1|+|ΔI2|+S0*|ΔI0|>0 для каждого из двух режимов самоблокировки является признаком неисправности системы управления гидравлическими блокирующими механизмами МОДС и МКДС передних и задних колес.
Аналоговые сигналы Σ|ΔI|(1) и Σ|ΔI|(2) в соответствии с положением контактов управляющего реле - 198 и включенным режимом самоблокировки передается на панель управления (фиг. 16), в блок - 205 формирования сигналов состояния и нарушения работы электронного управления и гидравлической системы. Этот сигнал посредством релейного звена - 206 (фиг. 16) преобразуется в цифровой сигнал u4.
В этом же блоке на основе сигнала датчика давления - 110 (фиг. 9) в магистрали - 100 подпитки формируется сигнал u3 падения до нижнего порогового уровня давления подпитки (0.25 МПа), а также сигналы увеличения до верхнего порогового значения давления рвх1 и рвх2 во входных магистралях - 144 (фиг. 10, 11) гидравлических блокирующих механизмах от реле давления РД-11 (фиг. 10) и РД-21 (фиг. 11), которые после логического сложения формируют цифровой сигнал u2. При равенстве единице управляющие сигналы u2, u3, u4 передаются на входы соответствующих усилителей - 207 панели управления и индикации, а после их усиления соответствующие усиленные сигналы U2, U3 и U4 поступают на входы соответствующих управляющих реле - 208 с постоянно разомкнутыми контактами K2, K3, K4, замыкание которых, индицируются световыми красными индикаторами Л2, Л3, Л4.
Блокированное состояние МКДС в режиме 1 фиксируется сигналом u8. Он формируется в блоке - 205 (фиг. 16) формирования сигналов состояния и нарушения работы электронного управления путем логического сложения вышеупомянутых сигналов Sδ1, Sδ2 блокировки МКДС в режиме 1 с сигналом u0. При Sδ1=0, Sδ2=0 (МКДС передних и задних колес блокированы) и при u0=0 (включен режим 1) логическая сумма равна 0, а ее инверсия - u8=1. Сигнал поступает на вход усилителя - 209, а усиленный сигнал - U8 - на вход управляющего реле - 210 с постоянно разомкнутым контактом K8, при замыкании которого включается световой желтый индикатор Л5.
На фиг. 18 представлена принципиальная схема электроуправления исполнительными механизмами, обеспечивающего автоматическое включение и выключение полной блокировки и разблокировки МКДС и МОДС, электромагнитной муфты привода дополнительного насоса подпитки и золотников реверса в различных вариантах движения АТС, а также функциональная схема блока формирования - 211 (фиг. 18) команд автоматического управления. Аналоговые сигналы датчиков: Sγ датчика - 187 (фиг. 14) перемещения педали акселератора, Sλ датчика - 188 перемещения педали тормоза,

При u5=1 и наличия на входе управляющего реле - 222 с постоянно замкнутым контактом K5 напряжения U5, контакт разомкнут, управляющие соленоиды С00, С10, С20, С0у, С1у, С2у обесточены, золотники - 147 гидравлических блокирующих механизмов находятся в положении разблокировки МОДС и МКДС ведущих колес и электроуправление редукционных клапанов - 152 (фиг. 10, 11, 13) отключено. При u5=0 и замкнутом контакте K5 и золотники - 147 гидравлических блокирующих механизмов находятся в рабочем положении, обеспечивая функционирование режимов управляемой самоблокировки МОДС и МКДС ведущих колес..
При u=0 на входе управляющего реле - 221 с постоянно разомкнутым контактом K напряжение отсутствует, управляющие соленоиды С13, С14, С23, С24 обесточены и золотники - 122, 123, 126, 127 (фиг. 10, 11) блокировки гидромашин находятся в положении разблокировки. При u=1 и замкнутом контакте K реле указанные золотники блокируют гидромашины и МОДС и МКДС ведущих колес. Эта автоматическая полная блокировка трансмиссии с помощью указанных золотников в отличие от ранее рассмотренного сигнала u8 блокировки МКДС в режиме 1 не сопровождается световой индикацией.
При u6=0 на входе управляющего реле - 223 с постоянно разомкнутым контактом K6 напряжение отсутствует, управляющие соленоиды С11, С12, С21, С22 обесточены и золотники - 124, 125, 128, 129 (фиг. 10, 11) реверса гидромашин находятся в положении "переднего хода" АТС. При u6=1, контакт K6 замкнут и указанные золотники находятся в положении "заднего хода" АТС.
При u7=0 на входе управляющего реле - 224 с постоянно замкнутым контактом K7 напряжение отсутствует, электромагнитная муфта - 95 (фиг. 1) в приводе дополнительного насоса - 93 подпитки включена. При превышении верхнего порогового значения давления подпитки (р0max=0.55…0.6 МПа) (S14=1), либо при превышении верхнего порогового значения частоты вращения входного вала раздаточной коробки (S13=1) u7=1. В этом случае постоянно замкнутый контакт K7 размыкается и выключает электромагнитную муфту - 95 и привод дополнительного насоса подпитки. Превышение указанных верхних пороговых значений может произойти и одновременно при прямолинейном движении на скорости более 50 км/час, когда наряду с увеличением суммарной производительности насосов подпитки уменьшается потребность в подпитке при неподвижных гидромашинах.
Формируемая автоматически команда u=1 (включения полной блокировки всех дифференциальных связей) дублируется ручной кнопкой Ky2 с замыкающим контактом, а команда u5=0 (включения разблокировки всех дифференциальных связей) - ручной кнопкой Ky3 с размыкающим контактом.
Работа трансмиссии с СЭУ в тяговом режиме движения АТС происходит следующим образом. После запуска первичного двигателя в системе подпитки устанавливается давление 0.5 МПа, которое превышает нижнее пороговое значение 0.25 МПа. Чтобы обеспечить функционирование режима 1 самоблокировки МКДС и МОДС, который является исходным, водитель должен задать его параметры I0 и I1 джойстиками переменных резисторов - 201 на панели управления, контролируя их значения на цифровых миллиамперметрах - 202 При включенной передаче переднего хода контакт K6 реле - 223 (фиг. 18) разомкнут и золотники реверса 124, 125, 128, 129 (фиг. 10, 11) удерживаются возвратными пружинами в исходном положении "переднего" хода. При незадействованных кнопках Ky2, Kу3 ручного управления отжим педали акселератора при нулевом сигнале S8 (нулевое значение угловой скорости поворота) вызывает подачу напряжения U на вход управляющего реле - 221, замыкание постоянно разомкнутого контакта К (фиг. 18) и переключение золотников 122, 123, 126, 127 в положение полной блокировки гидромашин и всех дифференциальных связей ведущих колес. Доступ рабочей жидкости к гидравлическим блокирующим механизмам - 140 перекрыт, гидромашины застопорены и солнечные шестерни - 50 колесных редукторов заторможены. Разгон АТС происходит при практически синхронном вращении всех четырех колес.
После возврата педали акселератора из нижнего положения и размыкания контакта К реле - 221 упомянутые золотники переключаются возвратными пружинами в исходное положение - разблокировки гидромашин. То же самое происходит и до возврата педали акселератора из нижнего положения, если при трогании с места АТС его управляемые колеса повернуты и гироскоп дает сигнал наличия угловой скорости поворота АТС (S8=1). В этих случаях нагнетательные рабочие полости гидромашин каждого ведущего моста соединятся с магистралями - 141, 142 высокого давления и через впускные обратные клапаны - 143 - с входной магистралью - 144 гидравлического блокирующего механизма, а рабочие полости низкого давления (с давлением подпитки) соединяются между собой магистралями - 138, 139. При прямолинейном движении из-за нулевой величины сигнала S8 при отсутствии угловых отклонений движения АТС всегда поддерживается режим 1 самоблокировки МОДС и МКДС (вне зависимости от положения кнопки Ky1). В соответствии с заданными значениями I0 и I1 трехконтурная следящая система управления в электронном блоке (фиг. 17) обеспечивает соответствующее изменение управляющего давления ру0, py1 и ру2 на выходе электроуправляемых редукционных клапанов - 152 и граничных значений перепадов давления Δр1к, Δр2к и Δр0к напорных клапанов - 151. При меньших фактических значениях перепада давления МКДС и МОДС блокированы, а при больших значениях - МКДС и МОДС за счет перепуска рабочей жидкости напорными клапанами - разблокированы..
При одинаковом сцеплении и сопротивлении качению левых и правых колес давление в нагнетательных полостях гидромашин одинаково и давление на входах и выходах гидравлических блокирующих механизмов - 140, роторы гидромашин застопорены и солнечные шестерни - 50 колесных редукторов неподвижны. Левые и правые колеса вращаются синхронно. При существенной разнице коэффициентов сцепления в режиме синхронного вращения левых и правых колес их касательные силы тяги перераспределяются. Тяговая нагрузка колес с более низким сцеплением снижается, а с более высоким - возрастает. Возникает небольшая разница действительной скорости движение этих колес. При достижении и превышении разницы перепадов давления в гидромашинах левых и правых колес заданных граничных значений напорные клапаны - 151 начинают перепускать рабочую жидкость из входной полости - 163 в выходную - 164, синхронный режим вращения колес заменяется дифференциальным В этом случае гидромашина замедляющегося и более нагруженного колеса работает в ведомом режиме гидронасоса, а гидромашина ускоряющегося и менее нагруженного колеса - в ведущем режиме гидромотора. При этом их роторы - 53 (фиг. 2), как и солнечных шестерни - 50 колесных редукторов, вращаются в противоположном направлении. Из-за неодинаковой частоты вращения указанных колес разница скорости движения левых и правых колес еще больше возрастает. Увеличиваются угловые отклонения АТС от заданного направления движения. Для стабилизации прямолинейного движения на панели управления - 191 необходимо задать более высокую относительную величину коэффициента блокировки I1 МКДС. Сопутствующее этому увеличение граничных значений перепадов давления напорных клапанов восстанавливает блокировку МКДС и синхронное вращение левых и правых колес АТС.
При повороте АТС из-за перераспределения буксования и касательных сил тяги более нагруженными, как правило, являются колеса "отстающего" борта АТС, поскольку их скорость движения должна уменьшаться, и менее нагруженными - колеса "забегающего" борта, скорость движения которых должна увеличиваться. Пока текущие значения разницы давления в нагнетательных полостях более и менее нагруженной гидромашины ведущего моста не достигнет заданного граничного значения, напорный клапан - 151 заперт и гидромашины заблокированы. При заторможенных солнечных шестернях - 50 колеса вращаются практически синхронно. При достижении и превышении заданного граничного значения перепада давления напорный клапан - 151 перепускает рабочую жидкость от более нагруженной гидромашины "отстающего" колеса к менее нагруженной - "забегающего" колеса. Как и в предыдущем случае, более нагруженная гидромашина работает в режиме гидронасоса, а менее нагруженная гидромашина - в режиме гидромотора. Между колесами устанавливается дифференциальная связь, но замедление "отстающего" колеса несколько превышает ускорение "забегающего" из-за суммарных объемных потерь (утечек рабочей жидкости) в обеих гидромашинах. Чем больше тяговая нагрузка ведущих мостов, тем больше заданная граничная величина перепадов давления, равная произведению суммарного перепада давления гидромашин соответствующих колес на заданную величину I1, и тем значительнее асимметрия изменения скорости колес.
При повороте АТС и невысоких скоростях движения, когда полюс поворота смещен к задней оси, передние колеса должны двигаться быстрее, чем задние. Поэтому при запертом напорном клапане тяговая нагрузка переднего ведущего мост снижается, а заднего увеличивается. При превышении отношения разницы суммарных перепадов давления гидромашин задних и передних колес к суммарному перепаду давления гидромашин всех ведущих колес заданного значения I0 напорный клапан - 151 межосевого блокирующего механизма - 91 перепускает по межосевой магистрали - 89 высокого давления (фиг. 13) рабочую жидкость от задних гидромашин к передним. Между осями колес устанавливается дифференциальная связь. Средняя частота вращения передних колес увеличивается за счет уменьшения частоты вращения задних колес. При этом средняя величина замедление задних колес несколько превышает среднюю величину ускорения передних по выше упомянутой причине.
При больших радиусах поворота АТС и высоких скоростях движения из-за смещения полюса поворота к передней оси АТС задние колеса, наоборот, должны двигаться быстрее, чем задние. Но как уже было сказано выше, напорный клапан - 151 межосевого блокирующего механизма - 91 блокирует поток рабочей жидкости в межосевой магистрали - 89 (фиг. 13) в обратном направлении и МОДС.
При повороте АТС режим 1 самоблокировки сохраняется до тех пор, пока какой-либо из указанных выше кинематических параметров Δω1, Δω2, ξ, δ1, δ2 не достигнет порогового значения. В этом случае автоматически включается режим 2 и эта смена режима самоблокировки индицируется на панели управления световым зеленым индикатором Л02, а световым красным индикатором Л1 - предупреждение водителю о предельной скорость движения. И если последний световой сигнал сохранится, несмотря на смену режима самоблокировки, водитель должен понизить скорость движения. Режим 2 остается включенным до тех пор, пока вызвавший включение этого режима кинематический параметр не изменится относительно своего верхнего порогового или своего максимального положительного значения на 10…15%. Этому может способствовать и снижение скорости движения Включение режима 1 происходит и при выходе АТС из поворота.
В режиме 2 самоблокировки между колесами каждого ведущего моста - постоянная межколесная и межосевая дифференциальная связь колес. В отличие от предыдущего, блокирующие моменты МКДС и МОДС не зависит от передаваемых ведущими мостами крутящих моментов. При повороте с малыми радиусами и невысокой скоростью, например, на сухом песке в сравнении с сухой грунтовой дорогой, блокирующие моменты МКДС и зависящий от них момент сопротивления повороту в режиме 1 возрастут примерно в шесть раз, что определяется соотношением сопротивления качению колес в этих условиях. Соответственно это отразится на уровне буксования и бокового увода "отстающего" борта АТС. В то же время, движение по песку в режиме 2 при аналогичных значениях скорости и радиуса поворота блокирующие моменты, зависящие только от разности частоты вращения колес, даже уменьшатся из-за снижения последней вследствие более высокого уровня буксования колес на песке в сравнении с грунтовой дорогой.. Поэтому в сложных дорожных условиях режим 2 в сравнении с режимом 1 обеспечит более высокую проходимость АТС. В то же время при повороте на грунтовой дороге и примерно одинаковой разности частоты вращения колес "забегающего" и "отстающего" борта АТС в режиме 2 в сравнении с режимом 1 блокирующие моменты и момент сопротивления повороту будет существенно выше. Это вызвано тем, что в режиме 1, в отличие от режима 2, блокирующие моменты МКДС и момент сопротивления повороту АТС не зависят от разности частоты вращения колес "забегающего" и "отстающего" борта. Таким образом, в нормальных дорожных условиях движения более выгоден режим 1.
При дорожном движении под уклон "накатом" или с включенной передачей КПП для торможения АТС двигателем давление рвх1 и рвх2 на входе гидравлических блокирующих механизмов - 140 (фиг. 10, 11) падает до минимума. При снижении его до нижнего порогового значения напряжение U5 (фиг. 18) на входе управляющего реле - 222 с постоянно замкнутым контактом K5 вызывает размыкание контакта и управляющие соленоиды C00, С10, С20, С0у, С1у, С2у обесточиваются. Золотники - 147 разблокировки гидравлических механизмов возвращаются возвратными пружинами в исходное положение, при котором магистрали - 144 и 145 (фиг. 10, 11), 89 и 181 (фиг. 13) соединяются между собой, минуя напорные клапаны -151. При этом отключается и электроуправление редукционных клапанов - 152. Происходит разблокировка МКДС и МОДС. Аналогично этому разблокировка осуществляется и при экстренном торможении АТС тормозной педалью по сигналу Sλ датчика - 188 перемещения (фиг. 18). Это позволяет совместить СЭУ с системой АБС управления тормозами.
При включении передачи заднего хода, по сигналу
Для аварийной транспортировки АТС на буксире, осуществляемой при неработающем первичном двигателе, необходимо наличие аккумуляторной батареи. При отсутствии движения и неработающем первичном двигателе АТС давление р0 в магистрали - 100 (фиг. 9) подпитки и других магистралях гидравлической системы, в т.ч. давление рвх1 и рвх2, а также частота вращения ω входного вала - 96 раздаточной коробки (фиг. 1) равны нулю. При р0=0 напряжение U подается на вход управляющего реле - 221 с постоянно разомкнутым контактом K. Контакт замыкается и соленоиды С13, С14, С23, С24 перемещают золотники - 122, 123 и 126, 127 в положение блокировки всех гидромашин и находятся в этом положении до тех пор, пока величина давления подпитки не достигнет нижнего порогового значения (0.25 МПа). Это предохраняет гидравлическую систему от попадания воздуха и связанных с этим негативных последствий При рвх1 и рвх2 ниже нижних пороговых значений сигнал S11=1, напряжение U5 на входе в управляющее реле - 222 (фиг. 18) размыкает его постоянно замкнутый контакт K5. При разомкнутом контакте K5 соленоиды С00, С10, С20, С0у, С1у, С2у - обесточены. Золотники - 145 гидравлических блокирующих механизмов под действием возвратных пружин находятся в исходном положении, обеспечивая полную разблокировку гидравлических блокирующих механизмов - 140 (фиг. 10, 11) МКДС и 91 (фиг. 13) МОДС, отключение электроуправления редукционных клапанов - 152. При величинах р0 и ω ниже верхних пороговых значений напряжение на входе управляющего реле - 224 (фиг. 18) с постоянно замкнутым контактом K7 отсутствует. При замкнутом контакте K7 электромагнитная муфта включена. Из-за отсутствия давления подпитки на панели управления включен световой красный индикатор Л3 (фиг. 16).
При движении АТС вращение колес передается входному валу - 96 раздаточной коробки - 2 (фиг. 1) и приводу этого насоса подпитки. С началом движения и увеличения скорости буксировки АТС давление в магистрали - 100 (фиг. 9) подпитки увеличивается до нижнего порогового значения (0,25 МПа) и световой красный индикатор Л3 гаснет. При достаточной величине рабочего объема насоса это происходит при скорости 5…6. км/час. При этом контакт K реле - 221 размыкается и золотники - 122, 123, 126, 127 возвратными пружинами перемещаются в положение разблокировки гидромашин. В экстремальных случаях разблокировка гидромашин при более низком давлении подпитки может быть осуществлена ручной кнопкой управления Ky2 (фиг. 18).
При движении на буксире касательные силы колес отрицательны, абсолютное значение их соответствуют крутящим моментам на входных валах - 25 (фиг. 2) колесных редукторов - 13, 14, 15, 16, достаточных для холостого вращения элементов механической трансмиссии от полуосей ведущих мостов до вторичного вала коробки передач. В этом случае перепад давления в гидромашинах зависит только от величины этих крутящих моментов. Рабочие полости гидромашин меняются ролями, нагнетательные - через трубопроводы - 80 и 82, 84 и 86, магистрали - 112 и 114, 116 и 118, выходы - 134 и 135, 136 и 137 золотников реверса соединяются между собой магистралями - 138 и 139 (в тяговом режиме - магистрали низкого давления) и межосевой магистралью - 90. При этом обратные клапана - 119 разъединяют эту магистраль с магистралью - 100 подпитки (фиг. 10, 11). А входные магистрали - 141 и 142 (в тяговом режиме - магистрали высокого давления) гидравлических блокирующих механизмов - 140 через входы 130 и 131, 132 и 133 золотников реверса, магистрали - 111 и 113, 115 и 117 и трубопроводы - 79 и 81, 83 и 85 соединяются с всасывающими или сливными полостями гидромашин, и посредством обратных клапанов - 119 - с магистралью подпитки - 100. При этом величина давления рвх1 и рвх2 в магистралях - 144, связанных с входами реле давления РД-12, РД-22. равна давлению подпитки и, естественно, ниже их заданного нижнего порогового значения. Поэтому разомкнутое состояние контакта K5 реле - 222 сохраняется, а при этом сохраняется разблокированное состояние гидравлических блокирующих механизмов, при котором давление на входе и выходе напорных клапанов одинаково и равно давлению подпитки.
При прямолинейном движении АТС на буксире, вне зависимости от разницы сопротивления качению колес, перепад давления в гидромашинах практически одинаков для колес левого и правого борта АТС, роторы гидромашин застопорены и солнечные шестерни - 50 колесных редукторов неподвижны. Наличие механических потерь в гидромашинах эквивалентно наличию внутреннего трения в механических дифференциалах. Поэтому даже при неодинаковом сопротивлении холостому вращению элементов трансмиссии привода передних и задних колес, если исключить экстремальные случаи потери сцепления колесами либо задних, либо передних колес при буксировке АТС, движение рабочей жидкости в межосевой магистрали - 90 отсутствует. Чтобы не допускать превышения верхнего порогового значение частоты вращения дополнительного насоса - 93 подпитки, водитель должен ограничивать скорость движения, соответствующей этой частоте вращения входного вала - 96 раздаточной коробки и предельно допустимой правилами дорожного движения скорости аварийной транспортировки на буксире (50 км/час).
При повороте буксируемого АТС крутящий момент ускоряющихся колес "забегающего" борта увеличивается, а замедляющихся колес "отстающего" борта уменьшаются. Соответственно, перепад давления в гидромашинах колес "забегающего" борта выше, чем в гидромашинах "отстающего" борта. Поэтому гидромашины ускоряющихся колес работают в режиме гидронасоса, а гидромашины замедляющихся колес - в режиме гидромотора. Роторы первых вращаются в сторону вращения колес, а роторы вторых - в обратном направлении. Разность давления в нагнетательных - 138, 139 и связанных между собой сливных магистралях - 144 и 145 пропорциональна сумме механических потерь (крутящего момента) в гидронасосе и гидромоторе. А давление в нагнетательных магистралях - 138 и 139 переднего - 87 и заднего - 88 (фиг. 9) гидравлических блоков управления близки по своей величине из-за малой разницы средней скорости движения передних и задних колес и, соответственно, расход рабочей жидкости в межосевой магистрали - 90 либо мал, либо отсутствует.
Таким образом, предлагаемая механическая трансмиссия АТС с портальными ведущими мостами, с гидравлическими межосевой (МОДС) и межколесными (МКДС) дифференциальными связями, обеспечиваемыми суммирующими планетарными механизмами в колесных несоосных редукторах, солнечные шестерни которых у каждого ведущего моста связаны нерегулируемой гидрообъемной передачей на основе обратимых радиально-плунжерных гидромашин, с электроуправляемыми гидравлическими самоблокирующими механизмами и автоматическим электронным управлением режимами самоблокировки, полной блокировки и разблокировки в сравнении с подобным известным устройством |5| обладает следующими преимуществами.
- Повышена экономичность, проходимость и маневренность АТС за счет лучшей адаптации его колесной ходовой системы к различным эксплутационным условиям. Это достигнуто благодаря использования в гидравлических блокирующих механизмах напорных клапанов с пропорциональным электроуправлением, которое позволило использовать эти механизмы в двух режимах самоблокировки с возможностью их автоматического переключения и бесступенчатого регулирования параметров самоблокировки. Первый режим самоблокировки с пропорциональной зависимостью блокирующего момента от суммарного передаваемого ведущим мостом (для МКДС) крутящего момента или от суммарного крутящего момента всех ведущих колес (для МОДС) предназначен для прямолинейного или близкого к нему характера движения в различных, в том числе, и условиях внедорожного движения, а также для движения по сухим грунтовым и дорогам с твердым покрытием. Второй режим самоблокировки с пропорциональной зависимостью блокирующего момента от квадрата разности частоты вращения колес ведущего моста (для МКДС) и от разности квадратов средней частоты вращения передних и задних колес (для МОДС) предназначен для плохих дорожных условий, в том числе и для внедорожного непрямолинейного движения.
- Улучшена управляемость АТС за счет самоблокировки в двух указанных выше режимах межосевой гидравлической дифференциальной связи при малых и средних скоростях движения с возможностью ее разблокировки кнопкой ручного управления и автоматической полной ее блокировки на повышенных скоростях движения при опережении задними колесами передних.
- Удобство управления в экстремальных условиях движения благодаря автоматизации переключения режимов самоблокировки, возможности бесступенчатого регулирования параметрами самоблокировки с места водителя АТС, применению навигационных датчиков и системы индикации предельно допустимой для конкретных условий движения скорости АТС, предельных значений параметров гидравлической системы, а также возможной неисправности системы электронного управления режимами самоблокировки.
- Повышена надежность работы гидравлической системы за счет использования в приводе второго дополнительного насоса подпитки электромагнитной муфты с электронным управлением, использования эжектора для отвода внешних утечек рабочей жидкости из внутренних полостей гидромашин, осевой разгрузки ротора гидромашин за счет отвода внешних утечек из его внутренней торцевой замкнутой полости.
Источники информации
1. Lowell J. Differential speed-sensitive and torque - sensitive limited slip coupling. US Patent 5,938,556 F16H 48/26 17.08.1999.
2. Габай E.B. Сравнение эффективности различных самоблокирующихся межколесных дифференциалов (МКД) при круговом движении АТС(4×4) для неодинаковых условий качения и сцепления внутренних и наружных колес на деформируемой грунтовой поверхности. "Журнал автомобильных инженеров" (ААИ) №4, 2015, стр. 42-45 и №6, 2015 г., стр. 46-51.
3. Schrand Е. Limited slip differential with integrated solenoid valve and plenum. US Patent 6,902,506 B2 F16H 48/20 07.06.2005.
4. Полный привод Honda https://carguts.ru/articles/4wd-honda/ SH-AWD
5. Габай E.B, Габай O.E.. Трансмиссия с гидравлическими межосевой и межколесными дифференциальными связями с автоматически управляемыми режимами блокировки для автотранспортного средства повышенной проходимости. RU Патент 2551052 С2 F16H 47/02, B60K 23/04 от 28.05.2013
Реферат
Изобретение относится к транспортным средствам. В механической трансмиссии с гидравлическими дифференциальными связями ведущих колес и многорежимной системой электронного управления их блокировкой, осуществляется блокировка межколесных и межосевых дифференциальных связей. Привод насоса подпитки от входного вала раздаточной коробки снабжен электромагнитной муфтой с электронным управлением. Гидравлический блокирующий механизм для каждого ведущего моста содержит электроуправляемый редукционный клапан, подключенный к входной магистрали этого блокирующего механизма, двухпозиционный подпружиненный электроуправляемый золотник разблокировки и два последовательно соединенных идентичных напорных гидроуправляемых клапана. Повышается маневренность, проходимость и экономичность ТС. 12 з.п. ф-лы, 18 ил.
Формула








Документы, цитированные в отчёте о поиске
Вездеходное транспортное средство
Комментарии