Управляемый узел колесного двигателя и узел для перемещения строительных подъемников и оборудования строительных лесов (варианты) - RU114439U1
Код документа: RU114439U1
Чертежи
Описание
2420-177463RU/045
ИНТЕГРАЛЬНЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ С ДАТЧИКОМ СКОРОСТИ, ПЛАНЕТАРНОЙ КОРОБКОЙ ПЕРЕДАЧ И СРЕДСТВАМИ УПРАВЛЕНИЯ
Настоящее техническое решение относится вообще к системам привода от колесного электрического двигателя для небольшого компактного строительного оборудования.
Патент США № 6,852,061, выданный 8 февраля 2005 г., включен в данный документ посредством ссылки и по существу скопирован в данном документе и приведен ниже, в данном разделе, «Предпосылки к созданию технического решения», настоящей заявки на патент. Фиг.1-3 представляют собой по существу точные копии из патента США № 6,852,061. Фиг.1 представляет собой перспективный вид 100 пары колесных двигателей в соответствии с известным уровнем техники, соединенных между собой соединительной тягой, используемой для управления. Фиг.2 представляет собой вид 200 спереди колесного двигателя в соответствии с известным уровнем техники. Фиг.3 представляет собой вид 300 сбоку с частичным разрезом, выполненным по линии 3-3, показанной на фиг.2, в соответствии с известным уровнем техники. Фиг.3А представляет собой вид 300А сбоку с частичным разрезом другого варианта осуществления в соответствии с известным уровнем техники.
Патент США № 6,852,061, выданный 8 февраля 2005 г., заявляет следующее:
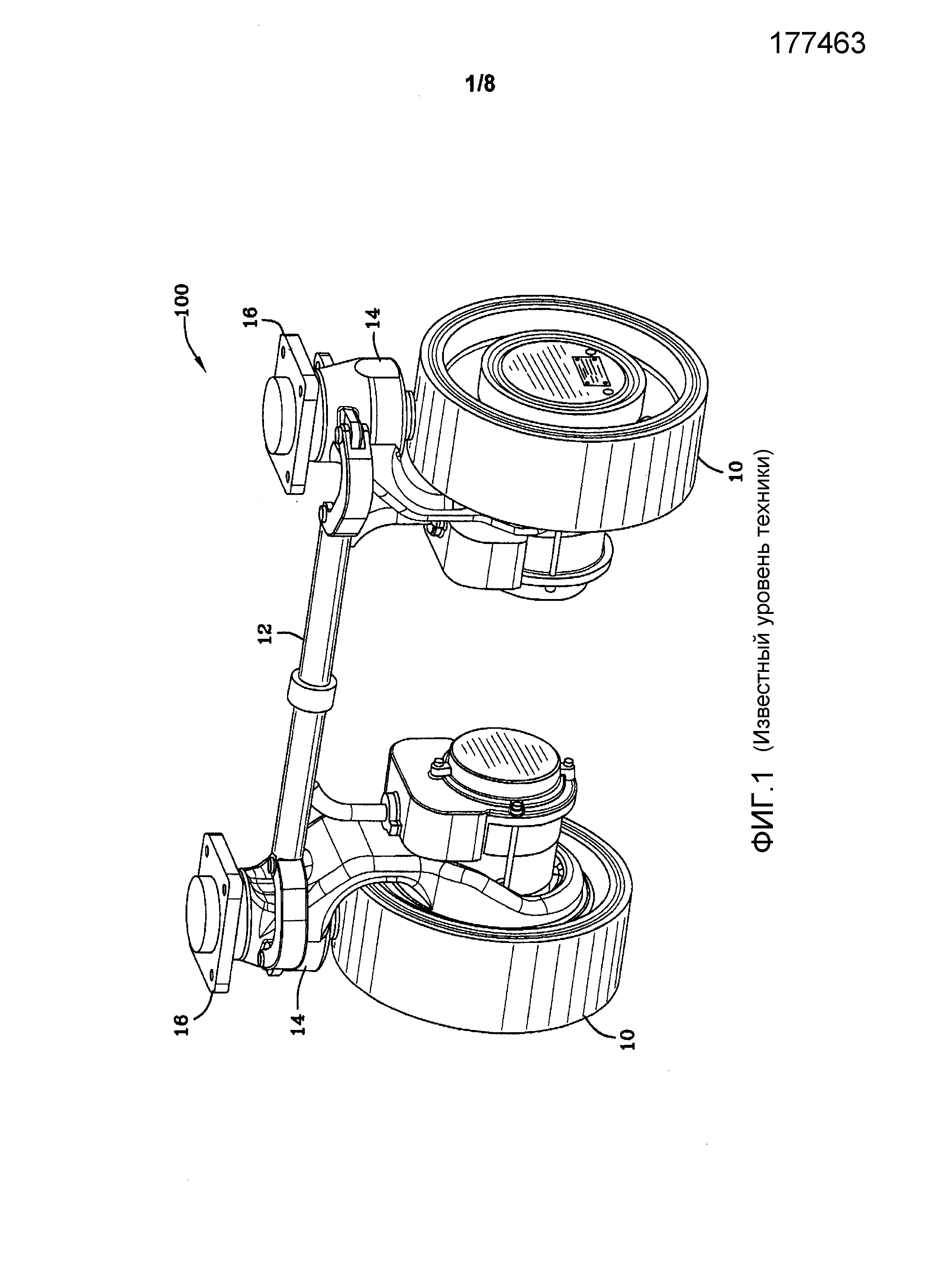
«Со ссылкой на фиг.1, два узла 10 колесных двигателей показаны в парной взаимосвязи с узлом 12 соединительной тяги, который соединен с возможностью поворота в каждом конце с осевыми кронштейнами 14. Осевые кронштейны 14 закреплены с возможностью поворота на валу (не показанном), продолжающемся вниз от кронштейнов 16. Кронштейны 16 могут быть установлены на соответствующее шасси ножничного подъемника или другому оборудованию строительных лесов (не показанному). Узел 12 соединительной тяги соединен с механизмом управления оборудования (не показанным) так, что соединительная тяга может быть смещена в сторону, чтобы вызывать поворот узлов колесных двигателей вокруг оси для управления оборудованием.
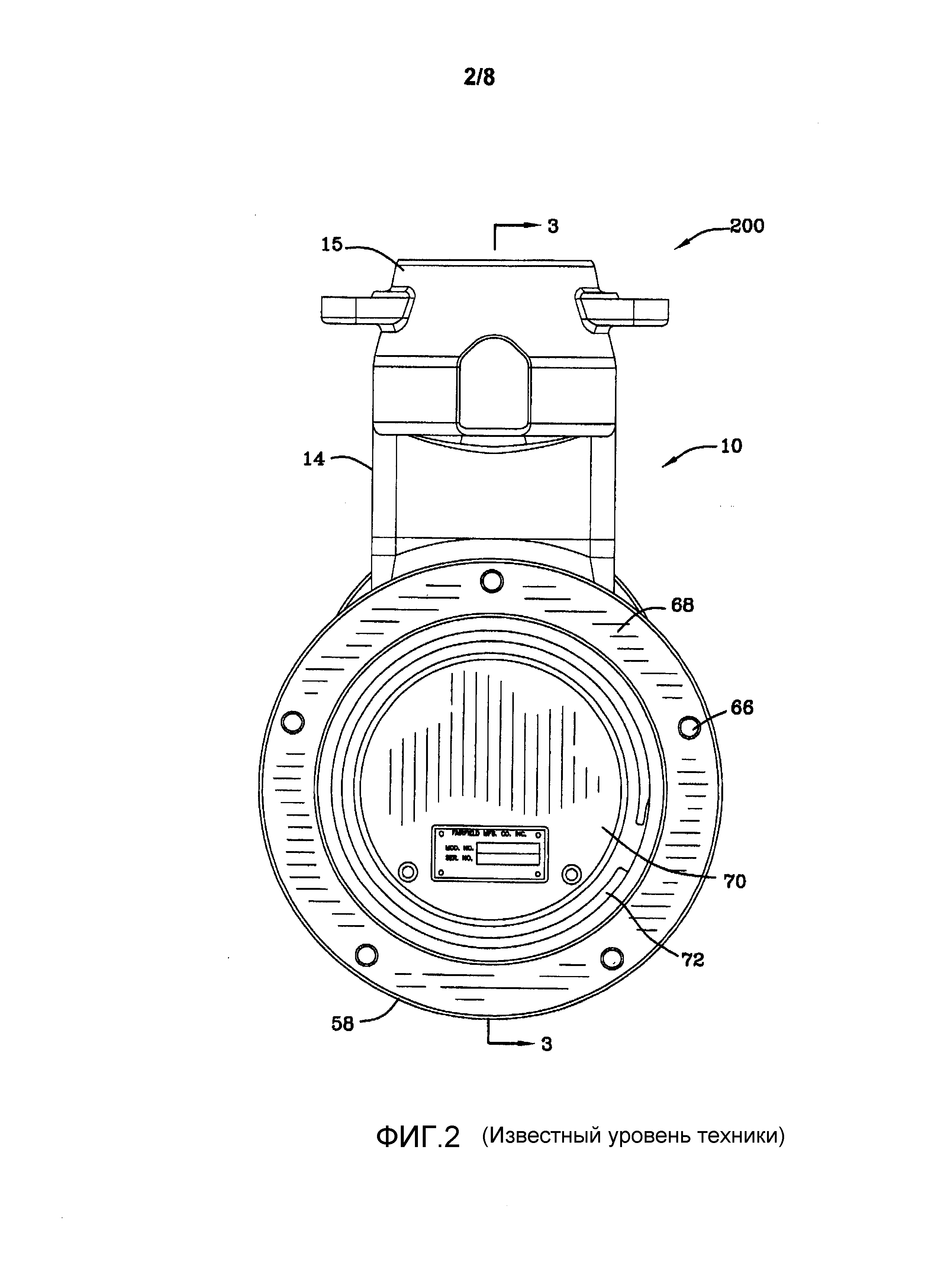
Со ссылкой на фиг.2 и 3, узел 10 колесного двигателя содержит осевой кронштейн 14, на который установлен двигатель 18. Верхний конец 15 осевого кронштейна 14 имеет образованное полое цилиндрическое отверстие 20, через которое возможен прием цилиндрического вала (не показан), установленного на кронштейне 16, так, что осевой кронштейн 14 может поворачиваться вокруг вертикальной оси 22.
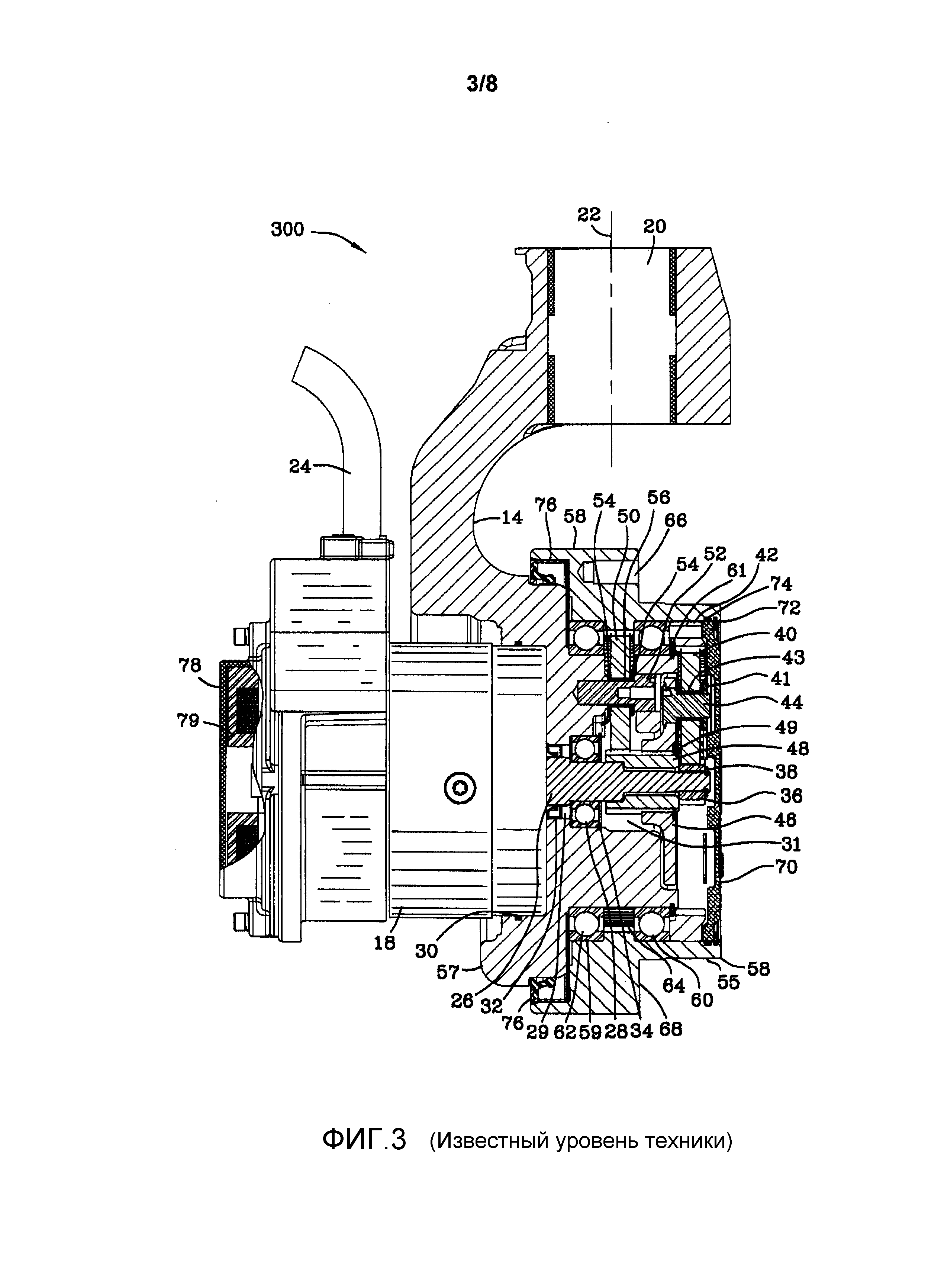
Электроэнергию подают в двигатель 18 через электрический кабель 24, который соединен с соответствующим источником электроэнергии. Приложение электроэнергии через кабель 24 вызывает вращение выходного вала 26 или двигателя 18. Выходной вал 26 опирается с возможностью вращения на подшипник 28 вала, расположенный в круглом отверстии 29 через нижний конец 57 осевого кронштейна 14. Вокруг края двигателя 18 расположено кольцевое уплотнение 30 для предотвращения попадания пыли и мусора в отсек двигателя и для опоры двигателя 18. Кроме того, для дополнительного уплотнения вала 26 предусмотрено манжетное уплотнение 32 вала для предотвращения утечки смазочного масла и попадания пыли и мусора в отсек шестерен. Отсек 31 шестерен содержит полую внутреннюю часть нижнего конца 57 осевого кронштейна 14. Подшипник 28 вала удерживается на месте посредством удерживающего кольца 34. На конце выходного вала 26 установлена входная солнечная шестерня 36, которая удерживается на конце вала 26 посредством удерживающего кольца 38, которое входит в зацепление с выемкой на конце вала 26. Солнечная шестерня 36 содержит множество зубьев, которые сцепляются с соответствующими зубьями на входных планетарных шестернях 40 (показана только одна из трех). Коронная шестерня 42, имеющая множество зубьев, выполнена с возможностью сцепления с зубьями входных планетарных шестерен 40 таким образом, что вращение входной солнечной шестерни 36 вызывает вращение входных планетарных шестерен в пределах коронной шестерни 42, вызывая круговое вращение входных планетарных шестерен вокруг солнечной шестерни 36. Планетарные шестерни 40 установлены для вращения на входных планетарных стержнях 44 посредством стопорного кольца 41 и опираются для вращения вокруг входных планетарных стержней 44 посредством игольчатых подшипников 43. Стержни 44 установлены на входном водиле 46, которое соединено с выходной солнечной шестерней 48. Входное водило 46 зафиксировано на выходной солнечной шестерне 48 посредством стопорного кольца 49. Солнечная шестерня 48 установлена для вращения вокруг вала 26. Таким образом, когда входные планетарные шестерни 40 вынуждены совершать круговое движение вокруг солнечной шестерни 36, когда солнечная шестерня 36 вращается, водило 46 и соединенная с ним выходная солнечная шестерня 48 вынуждены вращаться вокруг вала 26 в том же самом направлении.
Выходная солнечная шестерня 48 имеет зубья, которые сцепляются с зубьями на выходных планетарных шестернях 50, которые установлены для вращения на осевом кронштейне 14 посредством выходных планетарных стержней 52. Упорные шайбы 54 предусмотрены на каждой стороне выходных планетарных шестерен 50 вокруг стержня 52, и игольчатые подшипники 56 поддерживают выходные планетарные шестерни 50 для легкого вращения.
В общем цилиндрическая ступица 58 установлена для вращения вокруг нижнего конца 57 осевого кронштейна 14. Ступица 58 опирается для вращения на подшипники 60 и 62. Подшипники 60 удерживаются на месте посредством удерживающего кольца 61. С внутренней поверхностью 59 ступицы 58 соединена выходная коронная шестерня 64, которая входит в зацепление с выходными планетарными шестернями 50. Вращение выходных планетарных шестерен 50, вызываемое вращением выходной солнечной шестерни 48, вызывает вращение выходной коронной шестерни 64, вызывающее вращение соединенной с ней ступицы 58. Таким образом, подача электроэнергии к двигателю 18 вызывает вращение выходного вала 26 и прикрепленной к нему входной солнечной шестерни 36, которое в свою очередь вызывает вращение входных планетарных шестерен вокруг внутренней части коронной шестерни 42, которая в свою очередь вращает входное водило 46 и прикрепленную к нему выходную солнечную шестерню 48 вокруг вала 26. Вращение выходной солнечной шестерни 48 в свою очередь вызывает вращение выходных планетарных шестерен 50, которое в свою очередь вызывает вращение выходной коронной шестерни 64 и соединенной с ней в одно целое ступицы 58. Резиновое колесо (не показано) обычно прикреплено к наружной поверхности 55 ступицы 58 посредством болтов (не показаны), ввинченных в резьбовые выемки 66, образованные на вертикальной стороне 68 ступицы 58.
Крышка 70 лежит на открытом наружном конце ступицы 58 и удерживается на месте посредством стопорного кольца 72, которое входит в зацепление с канавкой на открытом наружном конце ступицы 58. По краю крышки 70 расположено кольцевое уплотнение 74 для предотвращения утечки смазочного масла и проникновения пыли и строительного мусора в отсек 31 планетарных шестерен. Кроме того, по внутреннему краю ступицы 58 и по краю осевого кронштейна 14 предусмотрено манжетное уплотнение 76 для предотвращения утечки смазочного масла и проникновения пыли и строительного мусора во внутреннюю часть механизма с обратной стороны.
Электрический двигатель 18 содержит тормозной механизм 79, расположенный на наружном конце двигателя 18 и закрытый крышкой 78. Тормозной механизм функионирует, чтобы блокировать вал 26 для предотвращения вращения вала 26, когда электроэнергию снимают с двигателя 18, но высвобождать вал 26 для вращения всякий раз, когда электроэнергию подают на двигатель 18. Данный блокировочный механизм предотвращает перемещение колес в любое время, когда электроэнергию не подают. Таким образом, если узел 10 колесного двигателя используют для приведения в движение ножничного подъемника или другого оборудования строительных лесов, то такое оборудование будет заблокировано и предохранено от перемещения, когда электроэнергию снимают с двигателя 24.
Описан и заявлен узел для перемещения строительных подъемников и оборудования строительных лесов. Данный узел включает в себя первый и второй управляемые узлы колесных двигателей для перемещения строительных подъемников и оборудования строительных лесов. Каждый из первого и второго управляемых узлов колесных двигателей для перемещения строительных подъемников и оборудования строительных лесов включает в себя осевой кронштейн, выполненный с возможностью установки с возможностью поворота в верхнем конце на механизме управления для вращения вокруг вертикальной оси. Каждый из узлов дополнительно включает в себя электрический двигатель, установленный на нижнем конце осевого кронштейна. Двигатель имеет выходной вал, который вращается вокруг оси, когда электроэнергию подают в двигатель. Выходной вал помещен через отверстие для вала во внутренней части нижнего конца осевого кронштейна.
Выходной вал опирается на первый набор подшипников и второй набор подшипников. Первый набор подшипников расположена в пределах электрического двигателя, а второй набор подшипников расположен между осевым кронштейном и выходным валом. Второй набор подшипников включает в себя датчик скорости и направления, составляющий одно целое с ним, для детектирования скорости и направления вращения выходного вала.
Второй набор подшипников включает в себя внутреннее кольцо и внешнее кольцо. Внутреннее кольцо прикреплено к выходному валу и выполнено с возможностью вращения вместе с ним, а внешнее кольцо является неподвижным. Намагниченное импульсное кольцо прикреплено к внутреннему кольцу и выполнено с возможностью вращения вместе с ним. К внешнему кольцу второго набора подшипников прикреплен корпус датчика, который детектирует магнитные импульсы, выдаваемые, когда внутреннее импульсное кольцо и вал вращаются. По существу цилиндрическая ступица колеса установлена на осевом кронштейне для вращения вокруг горизонтальной оси, совпадающей с осью вращения выходного вала.
Ступица колеса содержит наружную поверхность, на которой может быть установлено колесо, внутреннюю поверхность, окружающую внутреннюю часть нижнего конца осевого кронштейна, внутренний край между наружной и внутренней поверхностями и наружный край между наружной и внутренней поверхностями. Ступица опирается с возможностью вращения на третий набор подшипников, помещенный рядом с внутренним краем ступицы, и четвертый набор подшипников, помещенный внутри от наружного края ступицы.
Многоступенчатая система планетарных шестерен установлена вокруг выходного вала двигателя и помещена в пределах внутренней части осевого кронштейна и в пределах цилиндрической ступицы колеса между наружным краем и внутренним краем. Система планетарных шестерен включает в себя входную солнечную шестерню, помещенную между четвертым набором подшипников и наружным краем ступицы и установленную на выходном валу двигателя.
Входная солнечная шестерня содержит проксимальную часть и дистальную часть. Система планетарных шестерен также включает в себя входные планетарные шестерни, первую коронную шестерню, прикрепленную к внутренней части ступицы колеса, входное водило шестерен, включающее шлицованную внутреннюю часть, и выходную солнечную шестерню, включающую в себя шлицованную наружную часть. Выходная солнечная шестерня содержит проксимальную часть и дистальную часть. Между осевым кронштейном и проксимальным концом выходной солнечной шестерни расположена упорная шайба. Проксимальная часть выходной солнечной шестерни сцепляется с упорной шайбы, а дистальная часть выходной солнечной шестерни сцепляется с проксимальной частью входной солнечной шестерни.
Концевая крышка прикреплена к ступице колеса и выполнена с возможностью вращения вместе с ней. Концевая крышка ступицы колеса содержит цилиндрическую выемку, расположенную в ней по центру. В цилиндрической выемке в крышке размещается окружное распорное кольцо и окружной кронштейн. Дистальная часть входной солнечной шестерни сцепляется с окружным кронштейном в цилиндрической выемке в крышке.
Входная солнечная шестерня при вращении приводит в движение входные планетарные шестерни, которые находятся в зацеплении с и взаимодействуют с первой коронной шестерней, обеспечивая вращение входного водила шестерен. Шлицованная внутренняя часть входного водила шестерен сцепляется со шлицованной наружной частью выходной солнечной шестерни. Система планетарных шестерен дополнительно включает в себя выходные планетарные шестерни, приводимые в движение посредством шлицованной наружной части выходной солнечной шестерни. Выходные планетарные шестерни установлены с возможностью вращения относительно оси.
Выходная коронная шестерня расположена между третьим набором подшипников и четвертым набором подшипников и соединена с внутренней поверхностью ступицы колеса. Выходная коронная шестерня сцепляется с выходными планетарными шестернями многоступенчатой системы планетарных шестерен таким образом, что вращение выходных планетарных шестерен вызывает вращение выходных планетарных шестерен и ступицы колеса таким образом, что механическое усилие через систему планетарных шестерен прикладывается на ступицу колеса.
Датчик скорости и направления, который составляет одно целое со вторым набором подшипникового узла, выдает два прямоугольных сигнала. Процессор сигналов адаптирует прямоугольные сигналы для ввода в микропроцессор. Микропроцессор принимает адаптированные прямоугольные сигналы. Станция для ввода данных оператором вводит в микропроцессор требуемую скорость и направление ступицы колеса. Микропроцессор принимает адаптированные прямоугольные сигналы, сравнивает прямоугольные сигналы с введенными сигналами требуемой скорости и направления ступицы колеса и выдает корректирующий сигнал управления в соответствии с алгоритмом. Может быть использовано любое количество алгоритмов, и данные алгоритмы могут быть использованы для защиты двигателя. Микропроцессор, иногда называемый в данном документе встроенным микроконтроллером или встроенным микропроцессором, защищает двигателей.
Контроллер двигателя принимает и обрабатывает корректирующий сигнал управления из микропроцессора и выдает в электрический двигатель сигнал управления, предписывающий скорость и направление выходного вала.
Одно из основных преимуществ датчика скорости в мобильных применениях заключается в том, что он обеспечивает управление двигателем с обратной связью. Это обеспечивает точную регулировку напряжения, выдаваемого в якорь двигателя, на основе скорости, измеряемой датчиком, так что скорость двигателя будет точно соответствовать целевой (заданной) скорости. Датчик скорости также обеспечивает средство защиты для двигателя. Контроллер способен детектировать наличие состояния заблокированного ротора и будет прекращать подачу энергии в двигатель. В отсутствии датчика скорости контроллер может продолжать выдавать энергию в двигатель до тех пор, пока двигатель не сгорит. Датчики скорости могут быть использованы при множестве различных способов управления, некоторые из которых будут зависеть от применения. Датчики скорости могут быть использованы для регулирования тяги или для осуществления торможения или ускорения с конкретной скоростью или в пределах конкретного расстояния. Датчики скорости могут быть также использованы в качестве одометра и/или спидометра.
Упорная шайба между осью и выходной солнечной шестерней обеспечивает более точное регулирование осевого люфта выходной солнечной шестерни и входного водила. Использование упорной шайбы позволяет регулировать осевой люфт выходной солнечной шестерни без необходимости точной механической обработки вала в двигателе и таким образом уменьшает стоимость и сложность двигателя. Использование упорной шайбы обеспечивает надлежащее размещение выходной солнечной шестерни в пределах заданного пространства. Без использования упорной шайбы, вследствие увеличения производственных допусков, выходная солнечная шестерня может быть либо слишком свободной, либо она может быть слишком плотно посаженной.
Сцепление проксимальной части выходной солнечной шестерни с упорной шайбой, сцепление дистальной части выходной солнечной шестерни с проксимальной частью первой солнечной шестерни, и сцепление дистальной части входной солнечной шестерни с окружным кронштейном в цилиндрической выемке в крышке регулирует положение выходной солнечной шестерни в осевом направлении.
Использование упорной шайбы устраняет необходимость контролировать расстояние между первым выступом 301 и вторым выступом выходного вала. Выступ на выходном валу должен быть расположен в точном местоположении дистально относительно двигателя или другом местоположении на выходном валу. Размещенный иначе, выступ на валу должен быть расположен с высокой точностью относительно оси. Местоположение выступа имеет большое значение, поскольку соответствующий выступ сцепляется с выступом выходного вала и вращается относительно выходного вала. Точное местоположение выступа на валу определяет, установится ли преимущественно цилиндрическая выходная солнечная шестерня правильно в отведенном пространстве. Если выступ находится в надлежащем аксиальном положении, то выходная солнечная шестерня установится надлежащим образом. Если аксиальное местоположение выступа находится слишком далеко от выступа, то выходная солнечная шестерня установится слишком туго между выступом и проксимальным концом входной солнечной шестерни. Если же аксиальное местоположение выступа находится недостаточно далеко от выступа, то выходная солнечная шестерня установится слишком свободно между выступом и проксимальным концом входной солнечной шестерни. Ссылочная позиция показывает уплотнение, расположенное между выходным валом и смежной кольцевой шайбой оси.
Описан и заявлен управляемый узел колесного двигателя для перемещения строительных подъемников и оборудования строительных лесов, который включает в себя осевой кронштейн, выполненный с возможностью установки с возможностью поворота в верхнем конце на механизме управления с возможностью вращения вокруг вертикальной оси. Выходной вал опирается на первый набор подшипников и второй набор подшипников, причем второй набор подшипников включает в себя датчик скорости и направления, составляющий одно целое с ним, для детектирования скорости и направления вращения выходного вала. Датчик выдает в систему управления сигнал, который управляет скоростью и направлением оборудования. Упорная шайба используется для точного размещения выходной солнечной шестерни, уменьшая стоимость изготовления и технического обслуживания узла. Использование упорной шайбы уменьшает стоимость механической обработки выходного вала с жестким допуском.
Целью настоящего технического решения является обеспечение выходного вала, опирающегося на первый набор подшипников и второй набор подшипников, причем второй набор подшипников расположен между осевым кронштейном и выходным валом и при этом второй набор подшипников включает в себя датчик скорости и направления, составляющий одно целое с ним, для детектирования скорости и направления вращения выходного вала.
Другой целью настоящего технического решения является обеспечение второго набора подшипников, который включает в себя внутреннее кольцо и внешнее кольцо, причем внутреннее кольцо прикреплено к выходному валу и выполнено с возможностью вращения вместе с ним, а внешнее кольцо является неподвижным.
Другой целью настоящего технического решения является обеспечение второго набора подшипников, в котором намагниченное импульсное кольцо прикреплено к внутреннему кольцу и выполнено с возможностью вращения вместе с ним и в которой к внешнему кольцу второго набора подшипников прикреплен корпус датчика, который детектирует магнитные импульсы, выдаваемые, когда внутреннее импульсное кольцо и вал вращаются.
Другой целью настоящего технического решения является то, что датчик скорости и направления выдает прямоугольные сигналы, процессор сигналов адаптирует прямоугольные сигналы для ввода в микропроцессор, микропроцессор принимает адаптированные прямоугольные сигналы и затем сравнивает их с сигналами требуемой скорости и направления ступицы колеса.
Другой целью настоящего технического решения является то, что микропроцессор принимает адаптированные прямоугольные сигналы, сравнивает прямоугольные сигналы с введенными сигналами требуемой скорости и направления ступицы колеса и выдает корректирующий сигнал управления в соответствии с алгоритмом.
Другой целью настоящего технического решения является то, что может быть использовано любое количество алгоритмов, и данные алгоритмы могут быть использованы для защиты двигателя.
Другой целью настоящего технического решения является то, что контроллер двигателя принимает и обрабатывает корректирующий сигнал управления из микропроцессора и выдает в электрический двигатель сигнал управления, предписывающий скорость и направление выходного вала.
Другой целью настоящего технического решения является то, что датчик скорости используется для управления двигателем с обратной связью, которое обеспечивает точную регулировку напряжения, выдаваемого в якорь двигателя, на основе скорости, измеряемой датчиком, так что скорость двигателя будет почти точно соответствовать целевой (заданной) скорости.
Другой целью настоящего технического решения является обеспечение датчика скорости в сочетании с микропроцессором в качестве средства защиты двигателя.
Другой целью настоящего технического решения является обеспечение датчика скорости в сочетании с микропроцессором в качестве средства ограничения ускорения и замедления.
Другой целью настоящего технического решения является обеспечение датчика скорости в сочетании с микропроцессором для использования в качестве спидометра или одометра.
Другой целью настоящего технического решения является обеспечение упорной шайбы между осью и выходной солнечной шестерней, которое позволяет более точно регулировать осевой люфт выходной солнечной шестерни и входного водила.
Другой целью настоящего технического решения является обеспечения упорной шайбы для уменьшения необходимости в точной механической обработке вала в пределах двигателя и за пределами двигателя, таким образом уменьшая стоимость и сложность электрического двигателя.
Другая цель настоящего технического решения заключается в том, чтобы обеспечить: сцепление проксимальной части выходной солнечной шестерни с упорной шайбой, сцепление дистальной части выходной солнечной шестерни с проксимальной частью первой солнечной шестерни и сцепление дистальной части входной солнечной шестерни с окружным кронштейном в цилиндрической выемке в крышке, таким образом регулируя аксиальное положение выходной солнечной шестерни.
В соответствии с одним аспектом технического решения создан управляемый узел колесного двигателя для перемещения строительных подъемников и оборудования строительных лесов, содержащий:
- осевой кронштейн, выполненный с возможностью установки с возможностью поворота в верхнем конце на оборудовании с возможностью вращения вокруг вертикальной оси, причем упомянутый осевой кронштейн включает в себя нижнюю концевую часть, причем упомянутая нижняя концевая часть включает в себя внутреннюю часть и отверстие для вала в упомянутой внутренней части;
- электрический двигатель, установленный на упомянутой нижней концевой части упомянутого осевого кронштейна, причем упомянутый двигатель содержит выходной вал, который вращается вокруг оси, когда электроэнергию подают в упомянутый двигатель, причем упомянутый выходной вал упомянутого двигателя помещен через упомянутое отверстие для вала в упомянутую внутреннюю часть упомянутого нижнего конца упомянутого осевого кронштейна;
- упомянутый выходной вал опирается на первый набор подшипников и второй набор подшипников, причем упомянутый первый набор подшипников расположен в пределах упомянутого электрического двигателя, а упомянутый второй набор подшипников расположен между упомянутым осевым кронштейном и упомянутым выходным валом;
- упомянутый второй набор подшипников включает в себя датчик скорости и направления, составляющий одно целое с ним, для детектирования скорости и направления вращения упомянутого выходного вала;
- упомянутый второй набор подшипников включает в себя внутреннее кольцо и внешнее кольцо;
- упомянутое внутреннее кольцо прикреплено к упомянутому выходному валу и выполнено с возможностью вращения вместе с ним, а упомянутое внешнее кольцо является неподвижным;
- намагниченное импульсное кольцо, прикрепленное к упомянутому внутреннему кольцу и выполненное с возможностью вращения вместе с ним;
- корпус датчика, прикрепленный к упомянутому внешнему кольцу, который детектирует магнитные импульсы, выдаваемые, когда упомянутое внутреннее импульсное кольцо и упомянутый вал вращаются;
- по существу цилиндрическую ступицу колеса, установленную на упомянутом осевом кронштейне для вращения вокруг горизонтальной оси, совпадающей с упомянутой осью вращения упомянутого выходного вала;
- упомянутая ступица колеса содержит наружную поверхность, на которой может быть установлено колесо, внутреннюю поверхность, окружающую упомянутую внутреннюю часть упомянутого нижнего конца упомянутого осевого кронштейна, внутренний край между упомянутыми наружной и внутренней поверхностями и наружный край между упомянутыми наружной и внутренней поверхностями;
- упомянутая ступица опирается с возможностью вращения на третий набор подшипников, помещенный рядом с упомянутым внутренним краем упомянутой ступицы, и четвертый набор подшипников, помещенный внутри от упомянутого наружного края упомянутой ступицы;
- многоступенчатую систему планетарных шестерен, установленную вокруг упомянутого выходного вала упомянутого двигателя и помещенную в пределах упомянутой внутренней части упомянутого осевого кронштейна и в пределах упомянутой цилиндрической ступицы колеса между упомянутым наружным краем и упомянутым внутренним краем;
- упомянутая система планетарных шестерен включает в себя входную солнечную шестерню, помещенную между упомянутым четвертым набором подшипников и упомянутым наружным краем упомянутой ступицы и установленную на упомянутом выходном валу упомянутого двигателя;
- упомянутая входная солнечная шестерня содержит проксимальную часть и дистальную часть;
- упомянутая система планетарных шестерен дополнительно включает в себя входные планетарные шестерни, первую коронную шестерню, прикрепленную к упомянутой внутренней части упомянутой ступицы колеса, входное водило шестерен, включающее в себя шлицованную внутреннюю часть, и выходную солнечную шестерню, включающую в себя шлицованную наружную часть;
- упомянутая выходная солнечная шестерня содержит проксимальную часть и дистальную часть;
- между упомянутым осевым кронштейном и упомянутым проксимальным концом упомянутой выходной солнечной шестерни расположена упорная шайба;
- упомянутая проксимальная часть упомянутой выходной солнечной шестерни сцепляется с упомянутой упорной шайбой, а упомянутая дистальная часть упомянутой выходной солнечной шестерни сцепляется с упомянутой проксимальной частью упомянутой входной солнечной шестерни;
- концевую крышку, прикрепленную к упомянутой ступице колеса;
- упомянутая концевая крышка упомянутой ступицы колеса содержит цилиндрическую выемку, расположенную в ней по центру;
- в упомянутой цилиндрической выемке в упомянутой крышке расположены окружное распорное кольцо и окружной кронштейн;
- упомянутая дистальная часть упомянутой входной солнечной шестерни сцепляется с упомянутым окружным кронштейном в упомянутой цилиндрической выемке в упомянутой крышке;
- упомянутая входная солнечная шестерня при вращении приводит в движение упомянутые входные планетарные шестерни, которые находятся в зацеплении с и взаимодействуют с упомянутой первой коронной шестерней, обеспечивая вращение упомянутого входного водила шестерен;
- упомянутая шлицованная внутренняя часть упомянутого входного водила шестерен сцепляется с упомянутой шлицованной наружной частью упомянутой выходной солнечной шестерни;
- упомянутая система планетарных шестерен дополнительно включает в себя выходные планетарные шестерни, приводимые в движение посредством упомянутой шлицованной наружной части упомянутой выходной солнечной шестерни;
- выходную коронную шестерню, расположенную между упомянутым третьим набором подшипников и упомянутым четвертым набором подшипников и соединенную с упомянутой внутренней поверхностью упомянутой ступицы колеса; и
- упомянутая выходная коронная шестерня сцепляется с упомянутыми выходными планетарными шестернями упомянутой многоступенчатой системы планетарных шестерен таким образом, что вращение упомянутых выходных планетарных шестерен вызывает вращение упомянутых выходных планетарных шестерен и упомянутой ступицы колеса, так что механическое усилие через упомянутую систему планетарных шестерен передается на упомянутую ступицу колеса.
В соответствии с другим вариантом осуществления технического решения создан управляемый узел колесного двигателя для перемещения строительных подъемников и оборудования строительных лесов, дополнительно содержащий:
- упомянутый датчик скорости и направления выдает два прямоугольных сигнала;
- процессор сигналов для адаптирования упомянутых прямоугольных сигналов;
- микропроцессор принимает упомянутые адаптированные прямоугольные сигналы;
- станцию для ввода данных оператором для ввода в упомянутый микропроцессор требуемой скорости и направления ступицы колеса;
- упомянутый микропроцессор принимает упомянутые адаптированные прямоугольные сигналы и сравнивает упомянутые прямоугольные сигналы с упомянутыми введенными сигналами требуемой скорости и направления ступицы колеса и выдает корректирующий сигнал управления в соответствии с алгоритмом; и
- контроллер двигателя для приема и обработки упомянутого корректирующего сигнала управления из упомянутого микропроцессора и выдачи в упомянутый электрический двигатель сигнала управления, предписывающего скорость и направление упомянутого выходного вала и упомянутого оборудования.
В соответствии с вторым аспектом технического решения создан узел для перемещения строительных подъемников и оборудования строительных лесов, содержащий:
- первый и второй управляемые узлы колесных двигателей для перемещения строительных подъемников и оборудования строительных лесов;
- каждый из упомянутого первого и второго управляемых узлов колесных двигателей для перемещения строительных подъемников и оборудования строительных лесов включает в себя:
- осевой кронштейн, выполненный с возможностью установки с возможностью поворота в верхнем конце на механизме управления для вращения вокруг вертикальной оси;
- электрический двигатель, установленный на нижнем конце упомянутого осевого кронштейна, причем упомянутый двигатель содержит выходной вал, который вращается вокруг оси, когда электроэнергию подают в упомянутый двигатель, причем упомянутый выходной вал помещен через отверстие для вала в полую внутреннюю часть упомянутого нижнего конца упомянутого осевого кронштейна;
- упомянутый выходной вал опирается на первый набор подшипников и второй набор подшипников, причем упомянутый первый набор подшипников расположен в пределах упомянутого электрического двигателя, а упомянутый второй набор подшипников расположен между упомянутым осевым кронштейном и упомянутым выходным валом;
- упомянутый второй набор подшипников включает в себя датчик скорости и направления, составляющий одно целое с ним, для детектирования скорости и направления вращения упомянутого выходного вала;
- упомянутый второй набор подшипников включает в себя внутреннее кольцо и внешнее кольцо;
- упомянутое внутреннее кольцо прикреплено к упомянутому выходному валу и выполнено с возможностью вращения вместе с ним, а упомянутое внешнее кольцо является неподвижным;
- намагниченное импульсное кольцо, прикрепленное к упомянутому внутреннему кольцу и выполненное с возможностью вращения вместе с ним;
- к упомянутому внешнему кольцу прикреплен корпус датчика, который детектирует магнитные импульсы, выдаваемые, когда упомянутое внутреннее импульсное кольцо и упомянутый вал вращаются;
- по существу цилиндрическую ступицу колеса, установленную на упомянутом осевом кронштейне для вращения вокруг горизонтальной оси, совпадающей с упомянутой осью вращения упомянутого выходного вала;
- упомянутая ступица колеса содержит наружную поверхность, на которой может быть установлено колесо, внутреннюю поверхность, окружающую упомянутую внутреннюю часть упомянутого нижнего конца упомянутого осевого кронштейна, внутренний край между упомянутыми наружной и внутренней поверхностями и наружный край между упомянутыми наружной и внутренней поверхностями;
- упомянутая ступица опирается с возможностью вращения на третий набор подшипников, помещенный рядом с упомянутым внутренним краем упомянутой ступицы, и четвертый набор подшипников, помещенный внутри от упомянутого наружного края упомянутой ступицы;
- многоступенчатую систему планетарных шестерен, установленную вокруг упомянутого выходного вала упомянутого двигателя и помещенную в пределах упомянутой внутренней части упомянутого осевого кронштейна и в пределах упомянутой цилиндрической ступицы колеса между упомянутым наружным краем и упомянутым внутренним краем;
- упомянутая система планетарных шестерен включает в себя входную солнечную шестерню, помещенную между упомянутым четвертым набором подшипников и упомянутым наружным краем упомянутой ступицы и установленную на упомянутом выходном валу упомянутого двигателя;
- упомянутая входная солнечная шестерня содержит проксимальную часть и дистальную часть;
- упомянутая система планетарных передач дополнительно включает в себя входные планетарные шестерни, первую коронную шестерню, прикрепленную к упомянутой внутренней части упомянутой ступицы колеса, входное водило шестерен, включающее в себя шлицованную внутреннюю часть, и выходную солнечную шестерню, включающую шлицованную наружную часть;
- упомянутая выходная солнечная шестерня содержит проксимальную часть и дистальную часть;
- между упомянутым осевым кронштейном и упомянутым проксимальным концом упомянутой выходной солнечной шестерни расположена упорная шайба;
- упомянутая проксимальная часть упомянутой выходной солнечной шестерни сцепляется с упомянутой упорной шайбой, а упомянутая дистальная часть упомянутой выходной солнечной шестерни сцепляется с упомянутой проксимальной частью упомянутой входной солнечной шестерни;
- концевую крышку, прикрепленную к упомянутой ступице колеса;
- упомянутая концевая крышка упомянутой ступицы колеса содержит цилиндрическую выемку, расположенную в ней по центру;
- в упомянутой цилиндрической выемке в упомянутой крышке расположены окружное распорное кольцо и окружной кронштейн;
- упомянутая дистальная часть упомянутой входной солнечной шестерни сцепляется с упомянутым окружным кронштейном в упомянутой цилиндрической выемке в упомянутой крышке;
- упомянутая входная солнечная шестерня при вращении приводит в движение упомянутые входные планетарные шестерни, которые находятся в зацеплении с и взаимодействуют с упомянутой первой коронной шестерней, обеспечивая вращение упомянутого входного водила шестерен;
- упомянутая шлицованная внутренняя часть упомянутого входного водила шестерен сцепляется с упомянутой шлицованной наружной частью упомянутой выходной солнечной шестерни;
- упомянутая система планетарных шестерен дополнительно включает в себя выходные планетарные шестерни, приводимые в движение посредством упомянутой шлицованной наружной части упомянутой выходной солнечной шестерни;
- выходную коронную шестерню, расположенную между упомянутым третьим набором подшипников и упомянутым четвертым набором подшипников и соединенную с упомянутой внутренней поверхностью упомянутой ступицы колеса; и
- упомянутая выходная коронная шестерня сцепляется с упомянутыми выходными планетарными шестернями упомянутой многоступенчатой системы планетарных шестерен таким образом, что вращение упомянутых выходных планетарных шестерен вызывает вращение упомянутых выходных планетарных шестерен и упомянутой ступицы колеса, так что механическое усилие через упомянутую систему планетарных шестерен прикладывается на упомянутую ступицу колеса.
В частности, создан управляемый узел колесного двигателя для перемещения строительных подъемников и оборудования строительных лесов, дополнительно содержащий:
- упомянутый датчик скорости и направления выдает два прямоугольных сигнала;
- процессор сигналов для адаптирования упомянутых прямоугольных сигналов;
- микропроцессор принимает упомянутые адаптированные прямоугольные сигналы;
- станцию для ввода данных оператором для ввода в упомянутый микропроцессор требуемой скорости и направления ступицы колеса;
- упомянутый микропроцессор принимает упомянутые адаптированные прямоугольные сигналы, и сравнивает упомянутые прямоугольные импульсы с упомянутыми введенными сигналами требуемой скорости и направления ступицы колеса и выдает корректирующий сигнал управления в соответствии с алгоритмом; и
- контроллер двигателя для приема и обработки упомянутого корректирующего сигнала управления из упомянутого микропроцессора и выдачи в упомянутый электрический двигатель сигнала управления, предписывающего упомянутые скорость и направление упомянутого выходного вала.
В соответствии с другим аспектом технического решения создан узел для перемещения строительных подъемников и оборудования строительных лесов, содержащий:
- первый и второй управляемые узлы колесных двигателей для перемещения строительных подъемников и оборудования строительных лесов;
- каждый из упомянутого первого и второго управляемых узлов колесных двигателей для перемещения строительных подъемников и оборудования строительных лесов включает в себя:
- осевой кронштейн, выполненный с возможностью установки с возможностью поворота в верхнем конце на оборудование для вращения вокруг вертикальной оси, причем упомянутый осевой кронштейн включает в себя нижнюю концевую часть, причем упомянутая нижняя концевая часть включает в себя внутреннюю часть и отверстие для вала в упомянутой внутренней части;
- электрический двигатель, установленный на упомянутой нижней концевой части упомянутого осевого кронштейна, причем упомянутый двигатель содержит выходной вал, который вращается вокруг оси, когда электроэнергию подают в упомянутый двигатель, причем упомянутый выходной вал упомянутого двигателя размещен через упомянутое отверстие для вала в упомянутую внутреннюю часть упомянутого нижнего конца упомянутого осевого кронштейна;
- по существу цилиндрическую ступицу колеса, установленную на упомянутом осевом кронштейне для вращения вокруг горизонтальной оси, совпадающей с упомянутой осью вращения упомянутого выходного вала;
- упомянутая ступица колеса содержит наружную поверхность, на которой может быть установлено колесо, внутреннюю поверхность, окружающую упомянутую внутреннюю часть упомянутого нижнего конца упомянутого осевого кронштейна, внутренний край между упомянутыми наружной и внутренней поверхностями и наружный край между упомянутыми наружной и внутренней поверхностями;
- упомянутая ступица опирается с возможностью вращения на третий набор подшипников, помещенный рядом с упомянутым внутренним краем упомянутой ступицы, и четвертый набор подшипников, помещенный внутри от упомянутого наружного края упомянутой ступицы;
- упомянутый выходной вал опирается на первый набор подшипников и второй набор подшипников, причем упомянутый первый набор подшипников расположен в пределах упомянутого электрического двигателя, а упомянутый второй набор подшипников расположен между упомянутым осевым кронштейном и упомянутым выходным валом;
- упомянутый второй набор подшипников включает в себя датчик скорости и направления, составляющий одно целое с ним, для детектирования скорости и направления вращения упомянутого выходного вала;
- упомянутый второй набор подшипников включает в себя внутреннее кольцо и внешнее кольцо;
- упомянутое внутреннее кольцо прикреплено к упомянутому выходному валу и выполнено с возможностью вращения вместе с ним, а упомянутое внешнее кольцо является неподвижным и находится в зацеплении с упомянутой осью;
- намагниченное импульсное кольцо, прикрепленное к упомянутому внутреннему кольцу упомянутого второго набора подшипников и выполненное с возможностью вращения вместе с ним;
- корпус датчика, прикрепленный к упомянутому внешнему кольцу, который детектирует магнитные импульсы, выдаваемые, когда упомянутое внутреннее импульсное кольцо и упомянутый вал вращаются;
- первую солнечную шестерню, прикрепленную к упомянутому валу таким образом, что вращение упомянутого вала вращает упомянутую первую солнечную шестерню;
- упомянутая первая солнечная шестерня помещена между упомянутым четвертым набором подшипников и упомянутым наружным краем упомянутой ступицы и установлена на упомянутом выходном валу упомянутого двигателя;
- упомянутая первая солнечная шестерня содержит проксимальную часть и дистальную часть;
- первые планетарные шестерни;
- первую коронную шестерню, прикрепленную к упомянутой внутренней части упомянутой ступицы колеса;
- первое водило, причем упомянутое первое водило включает в себя шлицованную внутреннюю часть;
- выходную солнечную шестерню, причем упомянутая выходная солнечная шестерня включает в себя шлицованную наружную часть;
- упомянутая выходная солнечная шестерня содержит проксимальную часть и дистальную часть, причем упомянутая выходная солнечная шестерня установлена для вращения вокруг упомянутой оси упомянутого выходного вала;
- между упомянутым осевым кронштейном и упомянутым проксимальным концом упомянутой выходной солнечной шестерни расположена упорная шайба;
- упомянутая проксимальная часть упомянутой выходной солнечной шестерни сцепляется с упомянутой упорной шайбой, а упомянутая дистальная часть упомянутой выходной солнечной шестерни сцепляется с упомянутой проксимальной частью упомянутой первой солнечной шестерни;
- концевую крышку, прикрепленную к упомянутой ступице колеса;
- упомянутая крышка упомянутой ступицы колеса содержит цилиндрическую выемку, расположенную в ней по центру, причем в упомянутой цилиндрической выемке в упомянутой крышке расположены окружное распорное кольцо и окружной кронштейн;
- упомянутая дистальная часть упомянутой входной солнечной шестерни сцепляется с упомянутым окружным кронштейном в упомянутой цилиндрической выемке в упомянутой крышке;
- упомянутое сцепление упомянутой проксимальной части упомянутой выходной солнечной шестерни с упомянутой упорной шайбой, упомянутое сцепление упомянутой дистальной части упомянутой выходной солнечной шестерни с упомянутой проксимальной частью упомянутой первой солнечной шестерни и упомянутое сцепление упомянутой дистальной части упомянутой входной солнечной шестерни с упомянутым окружным кронштейном в упомянутой цилиндрической выемке в упомянутой крышке управляет положение упомянутой выходной солнечной шестерни в осевом направлении;
- упомянутая первая солнечная шестерня при вращении приводит в движение упомянутые первые планетарные шестерни, которые находятся в зацеплении с и взаимодействуют с упомянутой первой коронной шестерней, обеспечивая вращение упомянутого первого водила;
- упомянутая шлицованная внутренняя часть упомянутого первого водила сцепляется с упомянутой шлицованной наружной частью упомянутой выходной солнечной шестерни, вызывая вращение упомянутой выходной солнечной шестерни;
- выходные планетарные шестерни, сцепляющиеся с упомянутой шлицованной наружной частью упомянутой выходной солнечной шестерни, причем упомянутые выходные планетарные шестерни установлены для вращения относительно упомянутого осевого кронштейна таким образом, что вращение упомянутой выходной солнечной шестерни вызывает вращение упомянутых выходных планетарных шестерен;
- выходную коронную шестерню, соединенную с внутренней частью упомянутой ступицы колеса, расположенную между упомянутым третьим набором подшипников и упомянутым четвертым набором подшипников; и
- упомянутая выходная коронная шестерня сцепляется с упомянутыми выходными планетарными шестернями таким образом, что вращение упомянутых выходных планетарных шестерен вызывает вращение упомянутой выходной коронной шестерни и ступицы колеса.
В частности создан узел для перемещения строительных подъемников и оборудования строительных лесов, дополнительно содержащий:
- упомянутый датчик скорости и направления выдает два прямоугольных сигнала;
- процессор сигналов для адаптирования упомянутых прямоугольных сигналов;
- микропроцессор принимает упомянутые адаптированные прямоугольные сигналы;
- станцию для ввода данных оператором для ввода в упомянутый микропроцессор требуемой скорости и направления ступицы колеса;
- упомянутый микропроцессор принимает упомянутые адаптированные прямоугольные сигналы и сравнивает упомянутые адаптированные прямоугольные сигналы с упомянутыми введенными сигналами требуемой скорости и направления ступицы колеса и выдает корректирующий сигнал управления в соответствии с алгоритмом; и
- контроллер двигателя для приема и обработки упомянутого корректирующего сигнала управления из упомянутого микропроцессора и выдачи в упомянутый электрический двигатель сигнала управления, предписывающего скорость и направление упомянутого выходного вала.
Дополнительные преимущества, признаки и возможные применения настоящего технического решения могут стать очевидными из описания, приведенного ниже со ссылками на варианты осуществления, проиллюстрированные в чертежах. В описании, формуле технического решения и чертежах использованы термины и соответствующие им ссылочные позиции, которые приведены в прилагаемом перечне ссылочных позиций. На чертежах
Фиг.1 представляет собой перспективный вид пары колесных двигателей в соответствии с известным уровнем техники, соединенные посредством соединительной тяги, используемой для управления;
Фиг.2 представляет собой вид спереди колесного двигателя в соответствии с известным уровнем техники;
Фиг.3 представляет собой вид сбоку с частичным разрезом, выполненным по линии 3-3, показанной на фиг.2, в соответствии с известным уровнем техники;
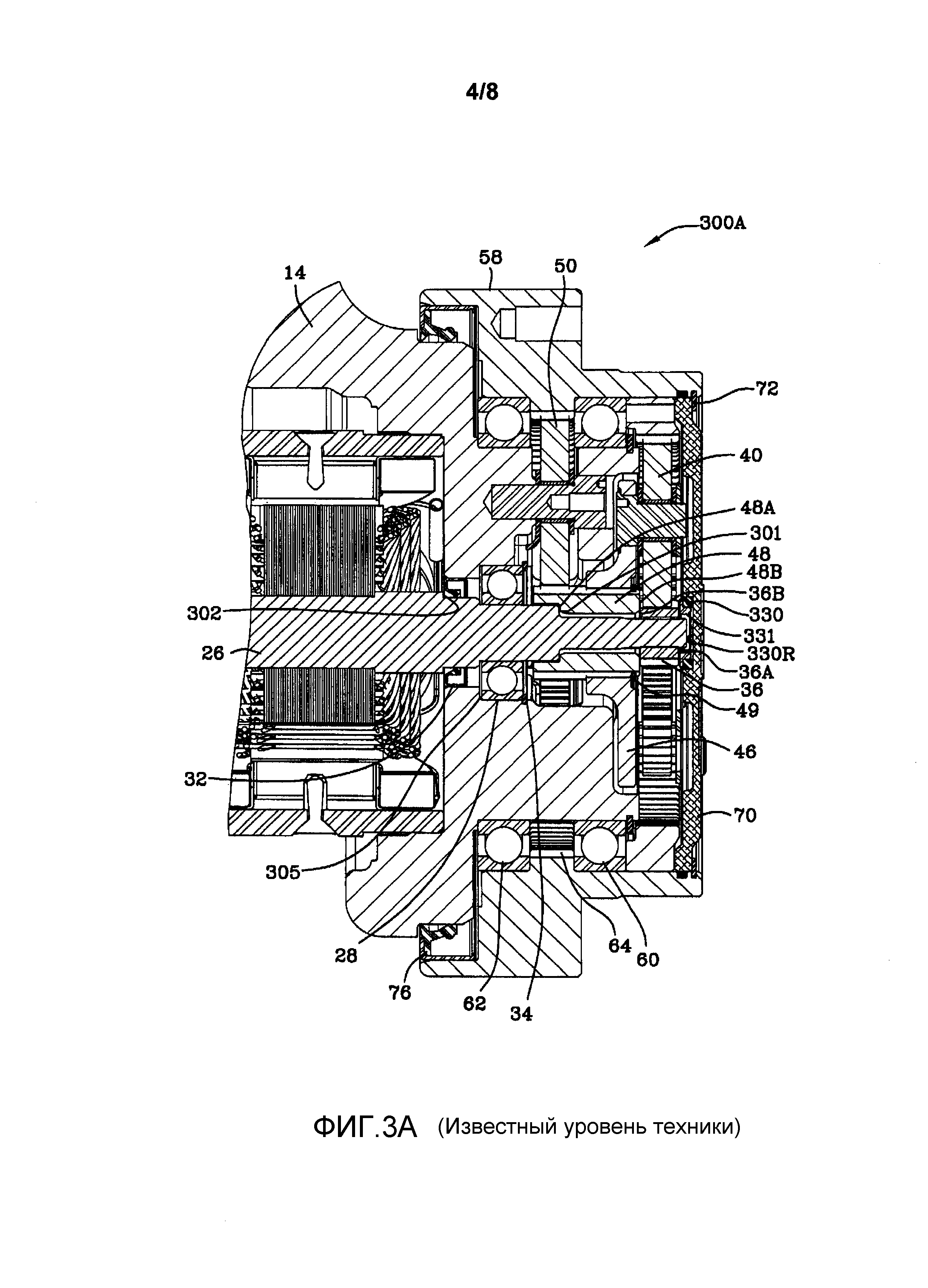
Фиг.3А представляет собой вид сбоку с частичным разрезом другого варианта осуществления в соответствии с известным уровнем техники;
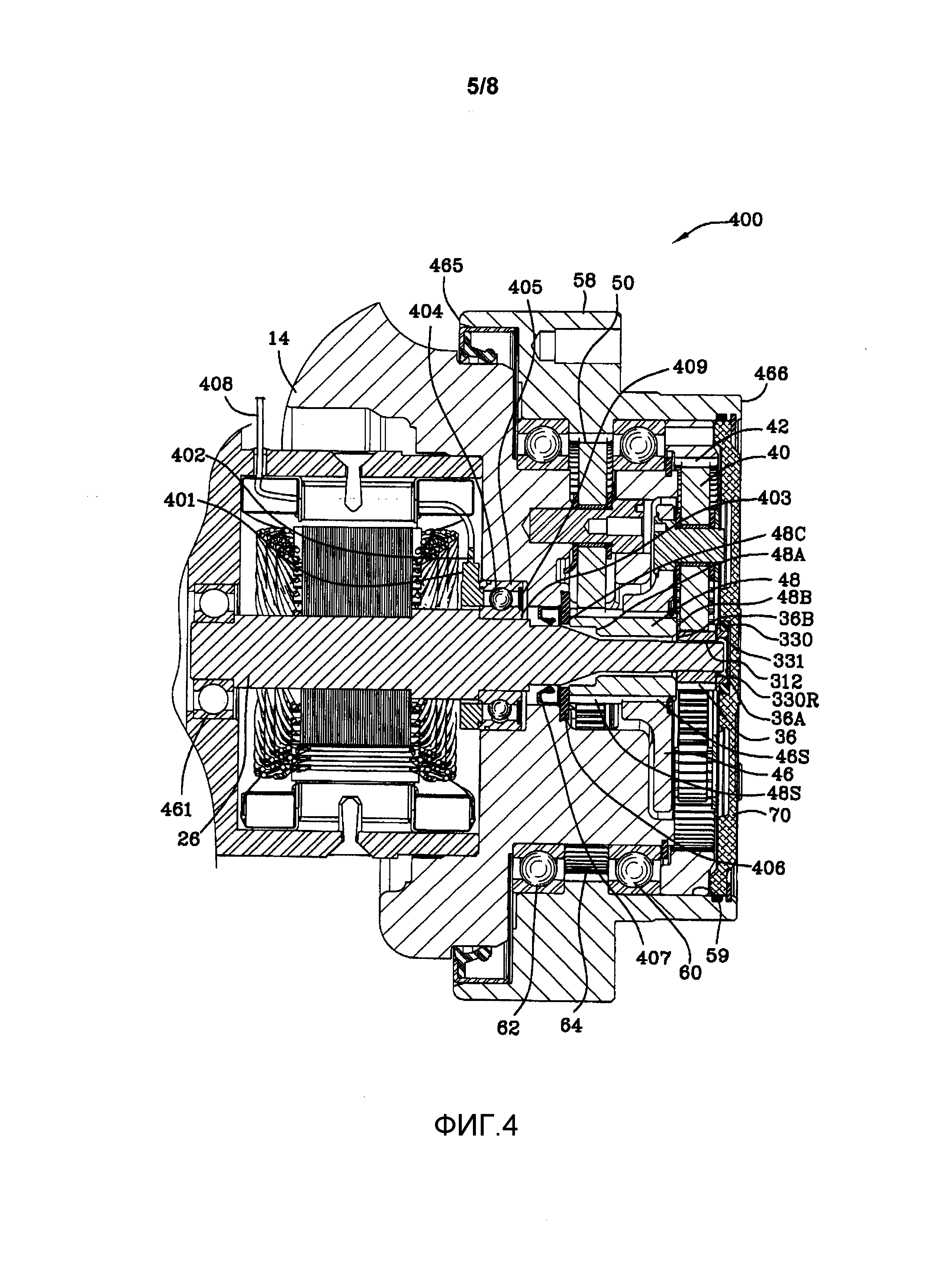
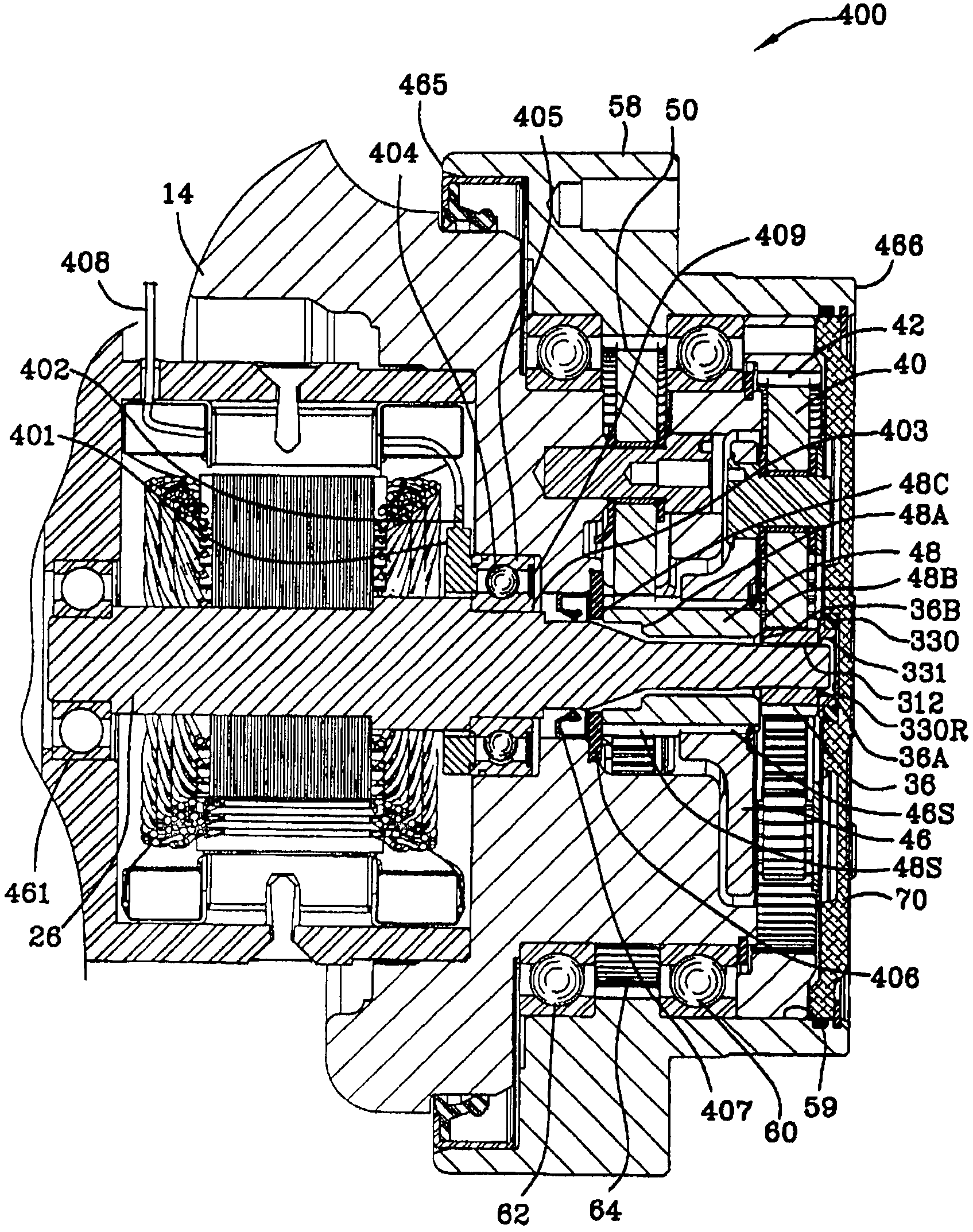
Фиг.4 представляет собой вид в разрезе в соответствии с техническим решением, иллюстрирующий блок подшипников датчика скорости, упорную шайбу, выходную солнечную шестерню, примыкающую к упорной шайбе, и выходной вал;
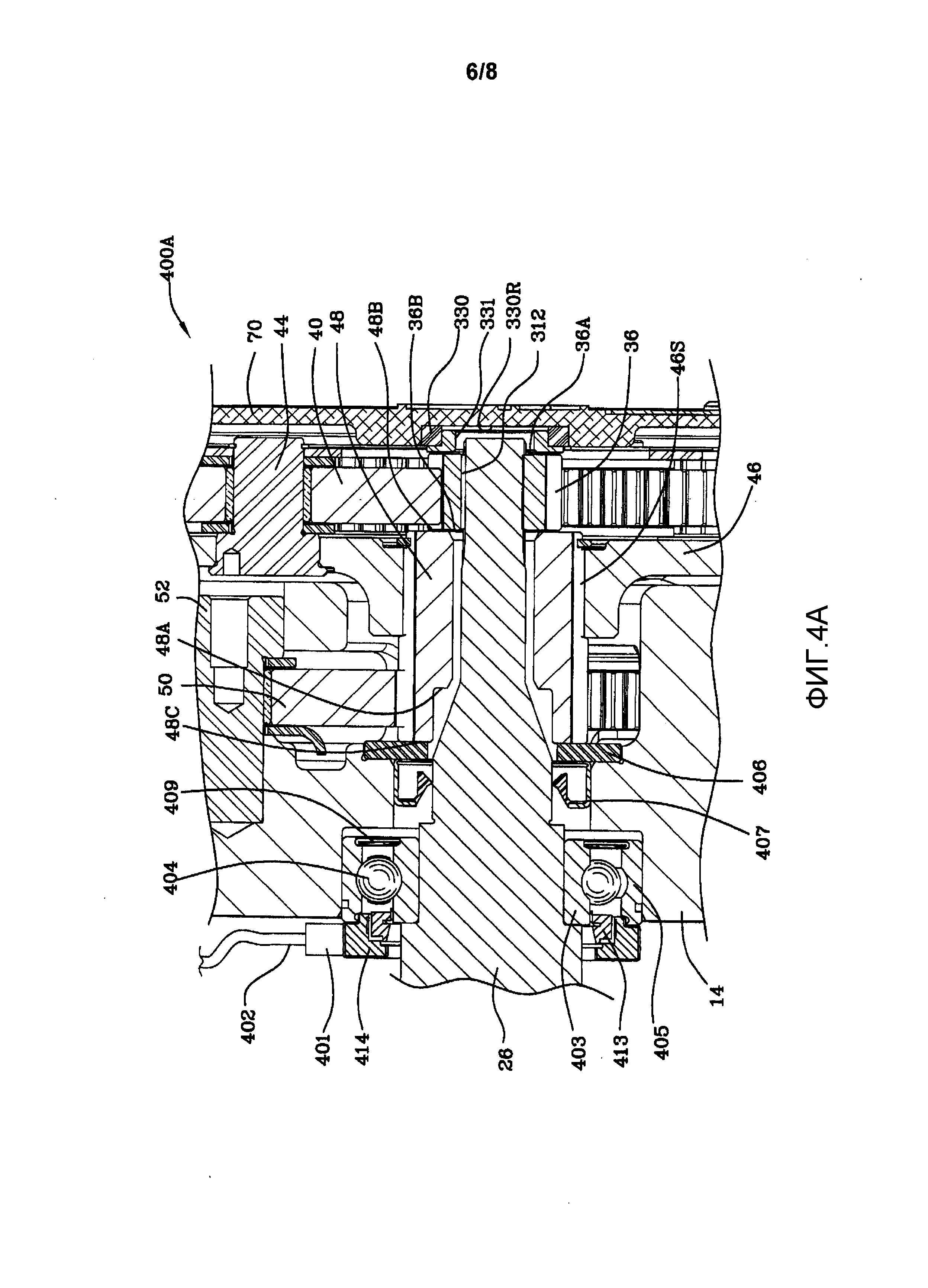
Фиг.4А представляет собой увеличенный вид части фиг.4;
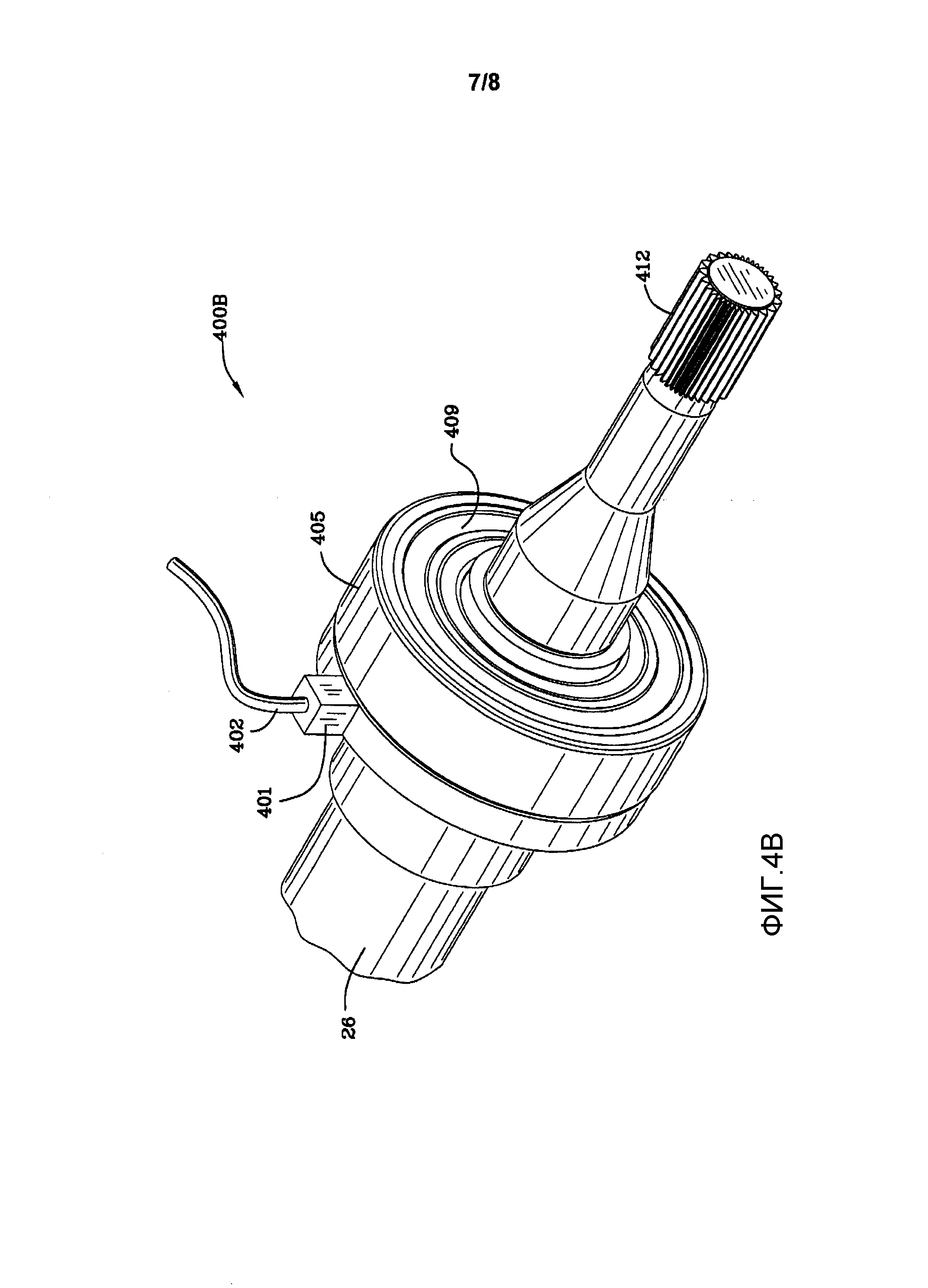
Фиг.4В представляет собой перспективный вид блока подшипников датчика скорости, установленного на выходном валу; и
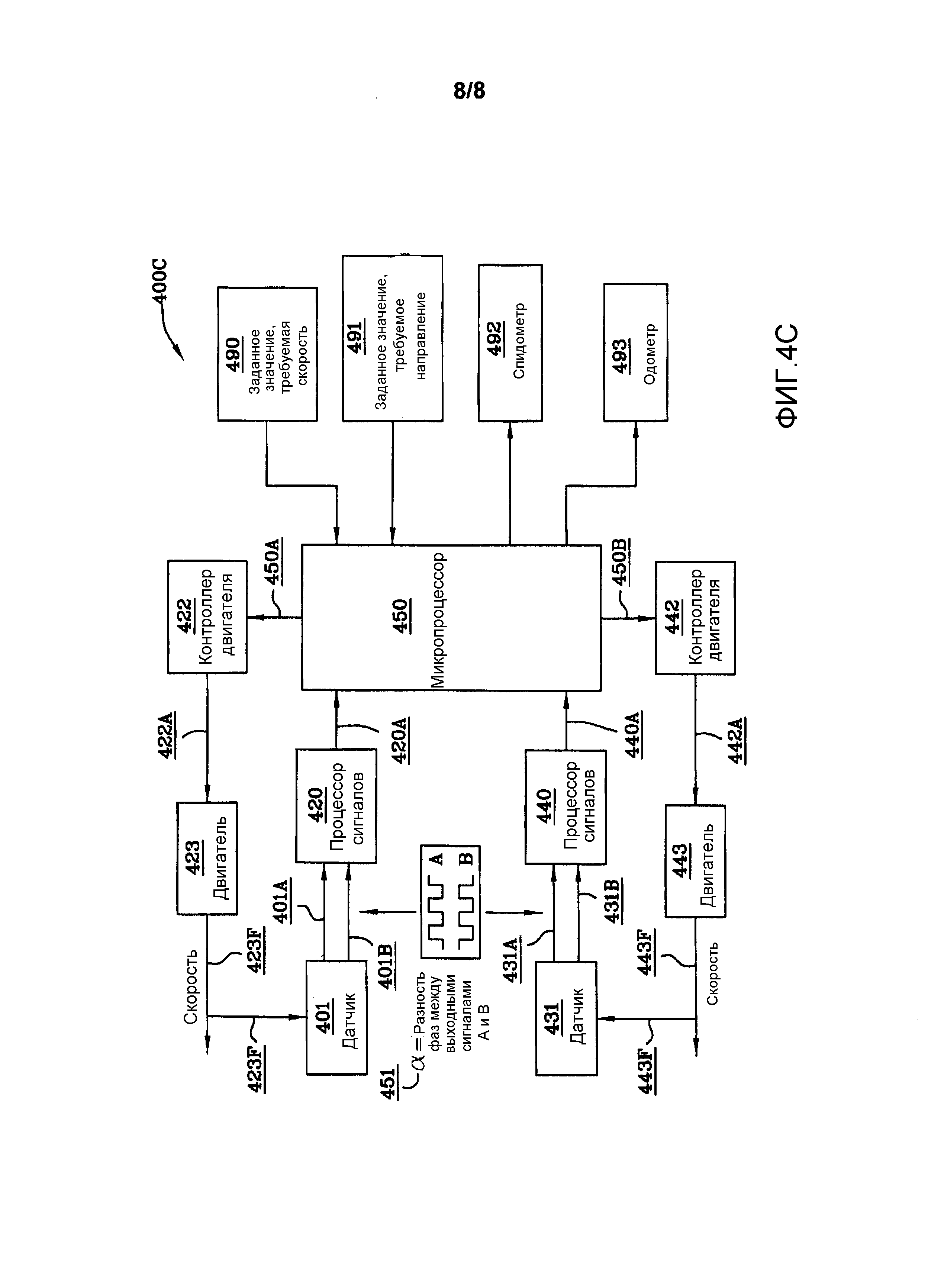
Фиг.4С представляет собой схему, на которой показаны микропроцессор, датчики контроля скорости и направления, процессоры сигналов, контроллеры двигателей, двигатели и соответствующие выходные сигналы для обоих колес.
Фиг.4 представляет собой вид 400 в разрезе технического решения, изображающий блок 401 подшипников датчика скости, упорную шайбу 406, выходную солнечную шестерню 48, примыкающую к упорной шайбе 406, и выходной вал 26. Узел 10 включает в себя первый и второй управляемые узлы колесных двигателей для перемещения строительных подъемников и оборудования строительных лесов. Каждый из первого и второго управляемых узлов колесных двигателей для перемещения строительных подъемников и оборудования строительных лесов включает в себя осевой кронштейн 14, выполненный с возможностью установки с возможностью поворота в верхнем конце 15 на механизме управления для вращения вокруг вертикальной оси 22. Каждый из узлов дополнительно включает в себя электрический двигатель 18, установленный на нижнем конце осевого кронштейна. Двигатель содержит выходной вал 26, который вращается вокруг оси, когда в двигатель подают электроэнергию. Выходной вал помещен через отверстие для вала во внутреннюю часть нижнего конца осевого кронштейна 14.
Выходной вал опирается на первый набор подшипников 461 и второй набор подшипников 401. Первый набор подшипников 461 расположен в пределах электрического двигателя между корпусом двигателя и валом 26.
Фиг.4В представляет собой перспективный вид 400В блока 401 подшипников датчика скорости, установленного на выходном валу 26. Второй набор подшипников 401 расположен между осевым кронштейном 14 и выходным валом 26. Второй набор подшипников 401 включает в себя датчик скорости и направления, составляющий одно целое с ним, для детектирования скорости и направления вращения выходного вала 26.
Второй набор подшипников 401 включает в себя внутреннее кольцо 403 и внешнее кольцо 405 и множество шариковых подшипников 404. Внутреннее кольцо 403 прикреплено к выходному валу 26 и выполнено с возможностью вращения вместе с ним, а внешнее кольцо 405 является неподвижным. Намагниченное импульсное кольцо 413 прикреплено к внутреннему кольцу 403 и выполнено с возможностью вращения вместе с ним, когда вал 26 вращается. К внешнему кольцу 405 второго набора подшипников 401 прикреплен корпус 414 датчика, который детектирует магнитные импульсы, выдаваемые, когда внутреннее импульсное кольцо 413 и вал 26 вращаются. От датчика 401 ведут кабели 402, 408 для связи с системой управления, показанной на фиг.4С. Ссылочная позиция 408 показывает наружную часть кабеля, который продолжается из корпуса двигателя, как показано на фиг.4.
Блоки 401 подшипники-датчик представляют собой специально выполненные инкрементные датчики положения для управления двигателем, выпускаемые компанией SKF Mechatronics. Датчик компании SKF Mechatronics указан в данном документе только в качестве примера, и может быть использовано множество других датчиков и других типов датчиков. Блоки 401 подшипники-датчик обеспечивают компактное и надежное кодирование сигналов, которые затем подвергаются обработке и используются в системе управления. Блоки подшипники-датчик, используемые в данном документе, предназначены для применений с вращающимся внутренним кольцом и неподвижным внешним кольцом.
Блок 401 подшипников датчика включает в себя активный датчик, который выполнен компактным и расположен очень близко к инкрементному датчику положения. Основными элементами датчика являются импульсное кольцо, корпус датчика с датчиками и соединительный кабель. К неподвижному внутреннему кольцу подшипника прикреплено композитное намагниченное импульсное кольцо, которое разделено на некоторое количество северных и южных полюсов. Корпус датчика прикреплен к внешнему кольцу подшипника. Корпус датчика содержит два чувствительных элемента для измерения и вычисления вращения вала в двух разных направлениях вращения. Датчик требует подачи внешнего напряжения. Датчик выдает два разных прямоугольных сигнала, и в зависимости от того, какой выдается сигнал, определяется направление и скорость вращения.
По существу цилиндрическая ступица 58 колеса прикреплена к осевому кронштейну 14 для вращения вокруг горизонтальной оси, совпадающей с осью вращения выходного вала 26. Ступица колеса содержит наружную поверхность 55, на которой может быть установлено колесо, внутреннюю поверхность 59, окружающую внутреннюю часть нижнего конца осевого кронштейна 14, внутренний край 465 между наружной 58 и внутренней 59 поверхностями, и наружный край 466 между наружной 55 и внутренней 59 поверхностями. Ступица 58 опирается с возможностью вращения на третий набор подшипников 62, расположенной рядом с внутренним краем 466 ступицы, и четвертым набором подшипников 60, помещенным внутри от наружного края 465 ступицы.
Многоступенчатая система планетарных шестерен установлена вокруг выходного вала 26 двигателя и помещена в пределах внутренней части осевого кронштейна 14 и в пределах цилиндрической ступицы 58 колеса между наружным краем 466 и внутренним краем 465. Система планетарных шестерен включает в себя входную солнечную шестерню 36, расположенную между четвертым набором 60 подшипников и наружным краем 466 ступицы 58 и установленную на выходном валу 26 двигателя. Входная солнечная шестерня 36 включает в себя внешнюю шлицу, которая сцепляется с наружным шлицем 412 выходного вала 26.
Входная солнечная шестерня 36 содержит проксимальную часть 36В и дистальную часть 36А. В данном документе входная солнечная шестерня 36 иногда называется «первой» солнечной шестерней. Определение «проксимальный» относится к стороне (или точке), наиболее близкой к двигателю, а определение «дистальный» относится к стороне (точке), наиболее удаленной от двигателя. Система планетарных шестерен дополнительно включает в себя входные планетарные шестерни 40, первую коронную шестерню 61, прикрепленную к внутренней части ступицы 58 колеса, входное водило 46 шестерен, включающее в себя шлицованную внутреннюю часть 46А, и выходную солнечную шестерню 48, включающую в себя шлицованную наружную часть 48S. В данном документе входные планетарные шестерни 40 иногда называются первыми планетарными шестернями. Кроме того, в данном документе входное водило 46 шестерен иногда называется первым водилом.
Выходная солнечная шестерня 48 содержит проксимальную часть 48С и дистальную часть 48С. Выходная солнечная шестерня установлена с возможностью вращения вокруг выходного вала. Между осевым кронштейном 14 и проксимальным концом 48С выходной солнечной шестерни 48 расположена упорная шайба 406. Проксимальная часть 48С выходной солнечной шестерни 48 сцепляется с упорной шайбой 406, а дистальная часть 48В выходной солнечной шестерни 48 сцепляется с проксимальной частью 36В входной солнечной шестерни 36.
Концевая крышка 70 прикреплена к ступице 58 колеса и выполнена с возможностью вращения вместе с ней. Концевая крышка ступицы колеса содержит внутреннюю часть, причем данная внутренняя часть содержит цилиндрическую выемку 330R, расположенную в ней по центру. В цилиндрической выемке 330R в крышке расположено окружное распорное кольцо 330 и окружной кронштейн 331. Дистальная часть 36А входной солнечной шестерни 36 сцепляется с окружным кронштейном 331 в цилиндрической выемке 330R в крышке.
Сцепление проксимальной части 48С выходной солнечной шестерни с упорной шайбой 406, сцепление дистальной части 48В выходной солнечной шестерни 48 с проксимальной частью 36В первой солнечной шестерни 36, и сцепление дистальной части 36А входной солнечной шестерни с окружным кронштейном 331 в цилиндрической выемке 330R в крышке регулирует положение выходной солнечной шестерни в осевом направлении.
Ссылаясь на фиг.3А, использование упорной шайбы устраняет необходимость контролировать расстояние между первым выступом 301 и вторым выступом 302 выходного вала 26. Ссылаясь также на фиг.3А, выступ 301 на выходном валу 26 должен быть расположен в точном местоположении дистально относительно двигателя или другого местоположения на выходном валу. Другими словами, выступ 301 на валу 26 должен быть расположен с высокой точностью относительно оси 14. Местоположение выступа 301 имеет большое значение, поскольку соответствующий выступ 48А выходной солнечной шестерни 48 сцепляется с выступом 301 выходного вала 26 и вращается относительно выходного вала 26. Точное местоположение выступа 301 на валу 26 определяет, установится ли в общем цилиндрическая выходная солнечная шестерня 48 правильно в отведенном пространстве. Если выступ 301 находится в надлежащем осевом положении, то выходная солнечная шестерня 48 установится надлежащим образом. Если осевое положение выступа 301 находится слишком далеко от выступа, то выходная солнечная шестерня установится слишком туго между выступом 301 и проксимальным концом 36В входной солнечной шестерни 36. Если же осевое положение выступа 301 находится недостаточно далеко от выступа 302, то выходная солнечная шестерня 48 установится слишком свободно между выступом 301 и проксимальным концом 36В входной солнечной шестерни 36.
Использование упорной шайбы 406, расположенной между осью 14 и выходной солнечной шестерней 48 обеспечивает ориентир (ось), который является точным и надежным. Выходная солнечная шестерня 48 надежно размещается в отведенном аксиальном пространстве между кольцом 406 и проксимальным концом 36В входной солнечной шестерни 36. Допуски выходной солнечной шестерни 48, шайбы 406, входной солнечной шестерни 36 и кронштейна 331 гарантируют надлежащее размещение выходной солнечной шестерни 48 между шайбой 406 и солнечной шестерней 36. Использование шайбы 406 значительно улучшает работу системы шестерен посредством уменьшения концевого люфта выходной солнечной шестерни 48.
Входная солнечная шестерня 36 при вращении приводит в движение входные планетарные шестерни 40, которые находятся в зацеплении с и взаимодействуют с первой коронной шестерней 42, обеспечивая вращение входного водила 46 шестерен. Шлицованная внутренняя часть 46А входного водила 46 шестерен сцепляется со шлицованной наружной частью 48S выходной солнечной шестерни 48. Система планетарных шестерен дополнительно включает в себя выходные планетарные шестерни 50, приводимые в движение посредством шлицованной наружной части 48S выходной солнечной шестерни 48.
Выходные планетарные шестерни установлены для вращения относительно осевого кронштейна таким образом, что вращение выходной солнечной шестерни вызывает вращение выходных планетарных шестерен. Ссылочная позиция 407 показывает уплотнение, расположенное между выходным валом 26 и осью 14 рядом с шайбой 406.
Выходная коронная шестерня 64, соединенная с внутренней частью ступицы колеса, расположена между третьим набором подшипников 62 и четвертым набором подшипников 60 и соединена с внутренней поверхностью 59 ступицы колеса. Выходная коронная шестерня 64 сцепляется с выходными планетарными шестернями 50 многоступенчатой системы планетарных шестерен таким образом, что вращение выходных планетарных шестерен 50 вызывает вращение выходной коронной шестерни 64 и ступицы 58 колеса, так что механическое усилие через систему планетарных шестерен прикладывается на ступицу колеса.
Фиг.4С представляет собой схему 400С, на которой показаны микропроцессор 450, датчики 401, 431 контроля скорости и направления, процессоры 420, 440 сигналов, контроллеры 422, 442 двигателей, двигатели 423, 443 и соответствующие выходные сигналы для обоих колес. Фиг.4С иллюстрирует работу системы привода двух колес. В частности, предусмотрено наличие систем привода четырех колес. Датчики 401, 431 скорости и направления выдают два прямоугольных сигнала 401А, 431А, 401В, 431В, которые не совпадают по фазе, как указано посредством сдвига фаз α (ссылочная позиция 499) относительно друг друга. Направление вала 26 определяется соотношением между выходными сигналами 401А, 401В датчика блока подшипников. Процессор 420, 440 сигналов адаптирует прямоугольные сигналы для ввода в микропроцессор 450. Микропроцессор 450 принимает адаптированные прямоугольные сигналы. Станция для ввода данных оператором выдает в микропроцессор 450 требуемую скорость 490 и направление 491 ступицы колеса. Микропроцессор 450 принимает адаптированные прямоугольные сигналы 420А, 440А, сравнивает прямоугольные сигналы с введенными сигналами требуемой скорости 490 и направления 491 ступицы колеса и выдает корректирующий сигнал 450А, 450В управления в соответствии с алгоритмом. Может быть использовано любое количество алгоритмов, и данные алгоритмы могут быть использованы для защиты двигателя и для защиты оператора оборудования. Микропроцессор 450, иногда называемый в данном документе встроенным микроконтроллером или встроенным микропроцессором, обеспечивает защиту двигателей.
Контроллер 422, 442 электродвигателя принимает и обрабатывает корректирующий сигнал 450А, 450В управления из микропроцессора 450 и выдает в электрический двигатель 423, 442 сигнал 422А, 442А управления, предписывающий скорость и направление 423F, 443F двигателя 423, 443.
Техническое решение описано в данном документе в качестве примера с конкретными деталями. Специалистам в данной области техники будет понятно, что изменения могут быть выполнены в данном техническом решении без отхода от сущности и объема приведенной ниже формулы полезной модели.
Перечень ссылочных позиций
10 два узла колесных двигателей
12 узел соединительной тяги
14 осевые кронштейны
15 верхний конец осевого кронштейна 14
16 кронштейн
18 двигатель
22 вертикальная ось
24 кабель
26 выходной вал
28 подшипник вала
29 круглое отверстие
30 кольцевое уплотнение
31 отсек шестерен
32 манжетное уплотнение
34 удерживающее кольцо
36 входная солнечная шестерня
36А дистальный конец входной солнечной шестерни 36
36В проксимальный конец входной солнечной шестерни 36
38 удерживающее кольцо
40 входная планетарная шестерня
41 стопорное кольцо
42 коронная шестерня
43 игольчатые подшипники
44 входные планетарные стержни
46 входное водило
46S шлицованная внутренняя часть входного водила 46
48 выходная солнечная шестерня
48А проксимальный выступ на выходной солнечной шестерне 48
48В дистальный конец выходной солнечной шестерни, примыкающий к проксимальному концу 36В входной солнечной шестерни
48С проксимальный конец выходной солнечной шестерни 48
48S шлицованная наружная часть выходной солнечной шестерни 48
49 стопорное кольцо
50 выходные планетарные шестерни
52 стержни
54 упорные шайбы
55 наружная поверхность ступицы 50
56 игольчатые подшипники
57 нижний конец осевого кронштейна 14
58 в общем цилиндрическая ступица
59 внутренняя поверхность ступицы 50
60 подшипники
62 подшипники
64 выходная коронная шестерня
70 крышка
72 стопорное кольцо
74 кольцевое уплотнение
76 манжетное уплотнение
78 крышка
79 тормозной механизм
100 перспективный вид пары колесных двигателей в соответствии с известным уровнем техники, соединенных посредством соединительной тяги, используемой для управления
200 вид спереди колесного двигателя в соответствии с известным уровнем техники вид сбоку с частичным разрезом, выполненным по линии 3-3, показанной на фиг.2, в соответствии с известным уровнем техники
300А вид сбоку с частичным разрезом другого варианта осуществления в соответствии с известным уровнем техники выступ на валу 26, который примыкает к выступу 48А на выходной солнечной шестерне
302 выступ на приводном валу 26 в пределах электрического двигателя
305 выступ на оси 14 для сцепления с подшипником 28
330 окружное распорное кольцо
330R расположенная по центру выемка
331 окружной кронштейн
400 вид в разрезе технического решения, изображающий блок подшипников датчика скорости, упорную шайбу, выходную солнечную шестерню, примыкающую к упорной шайбе, и приводной вал
400А увеличенный вид части фиг.4
400В перспективный вид блока подшипников датчика скорости, установленного на приводном валу
400С схема, показывающая микропроцессор, датчики скорости и направления, процессоры сигналов, контроллеры сигнала, контроллеры двигателей, двигатели и соответствующие выходные сигналы для обоих колес
401, 431 подшипник/датчик скорости
401А, 431А сигнал А
401В, 432А сигнал В α, фаза между сигналом 401А и 401В, определяет направление вала
402 кабель, идущий из датчика скорости
403 внутреннее, вращающееся, кольцо подшипника/датчика скорости, прикрепленное к валу 26
404 шариковые подшипники
405 внешнее, неподвижное, кольцо подшипника/датчика скорости, сцепляющееся с осью 24
406 упорная шайба
407 уплотнение
408 наружная часть кабеля 402
409 уплотнение подшипника/датчика скорости
412 шлиц на выходном валу 26
413 намагниченное импульсное кольцо
414 корпус датчика
420, 440 процессор сигналов
420А, 440А обработанный сигнал
422, 442 контроллер двигателя
422А, 442А выходной сигнал контроллера двигателя
423, 443 двигатель
423F,443F действительная скорость двигателя
450 микропроцессор
450А, 450В выходной сигнал микропроцессора
461 первый набор стандартных подшипников
465 внутренний край ступицы 58
466 наружный край ступицы 58
490 заданное значение, требуемая входная скорость
491 заданное значение, требуемое входное направление
492 спидометр
493 одометр
Реферат
1. Управляемый узел колесного двигателя для перемещения строительных подъемников и оборудования строительных лесов, содержащий: ! - осевой кронштейн, выполненный с возможностью установки с возможностью поворота в верхнем конце на оборудование для вращения вокруг вертикальной оси, причем упомянутый осевой кронштейн включает в себя нижний концевой участок, причем упомянутый нижний концевой участок включает в себя внутреннюю часть и отверстие для вала в упомянутой внутренней части; !- электрический двигатель, установленный на упомянутом нижнем концевом участке упомянутого осевого кронштейна, причем упомянутый двигатель содержит выходной вал, который вращается вокруг оси, когда электроэнергию подают в упомянутый двигатель, причем упомянутый выходной вал упомянутого двигателя помещен через упомянутое отверстие для вала в упомянутой внутренней части упомянутого нижнего конца упомянутого осевого кронштейна; ! - упомянутый выходной вал опирается на первый набор подшипников и второй набор подшипников, причем упомянутый первый набор подшипников расположен в пределах упомянутого электрического двигателя, а упомянутый второй набор подшипников расположен между упомянутым осевым кронштейном и упомянутым выходным валом; ! - упомянутый второй набор подшипников включает в себя датчик скорости и направления, составляющий одно целое с ним, для детектирования скорости и направления вращения упомянутого выходного вала; ! - упомянутый второй набор подшипников включает в себя внутреннее кольцо и внешнее кольцо; ! - упомянутое внутреннее кольцо прикреплено к упомянутому выходному валу и выполнено с возможностью вр
Формула
Комментарии