Система привода автомобиля и способ эксплуатации подобной системы привода - RU2538501C2
Код документа: RU2538501C2
Чертежи
Описание
Изобретение относится к системе привода автомобиля, содержащей по меньшей мере две оси, которые приводятся независимо друг от друга, по меньшей мере один электропривод, по меньшей мере одно управляющее устройство, содержащее по меньшей мере одну систему силовой электроники и содержащее устройство накопления энергии.
Подобная система привода известна, например, из DE 102006030197 А1. Кроме этого, данный документ раскрывает изменение распределения крутящего момента на двух валах, установленных с возможностью вращения, в частности, на одной оси, для того чтобы улучшить контроль над динамической устойчивостью автомобиля. Кроме этого, также в целом известны системы привода для полноприводных автомобилей, которые изменяют или адаптируют распределение крутящего момента обоих ведущих осей для оптимизации параметров динамики движения автомобиля и оптимизации контроля над устойчивостью. Помимо того, что данная адаптация распределения крутящего момента обеспечивает вполне удовлетворительные результаты в отношении устойчивости транспортного средства и параметров динамики движения транспортного средства, адаптация распределения крутящего момента также обеспечивает снижение расхода и, следовательно, выброса С02, то есть повышение эффективности вождения. Однако данное требование приводит к возникновению цели, конфликтующей с требованием максимально возможной динамики движения транспортного средства.
Таким образом, задача изобретения заключается в предоставлении системы привода, которая обеспечивает энергоэффективное распределение крутящего момента при оптимальных условиях динамики движения транспортного средства и оптимального контроля над устойчивостью автомобиля.
Данную задачу решают за счет того, что управляющее устройство содержит по меньшей мере один модуль управления приводом, модуль управления рекуперацией и модуль управления тормозом, при этом модуль управления приводом предоставляет предельное значение рекуперации для каждого электропривода, причем модуль управления рекуперацией соответствующим образом комбинирует данные предельные значения рекуперации и, как следствие, формирует максимальное общее предельное значение рекуперации, при этом модуль управления тормозом предоставляет общий тормозной момент, запрашиваемый водителем, таким образом, что посредством модуля управления рекуперацией можно выводить общий момент рекуперации, который меньше или равен общему предельному значению рекуперации, и, следовательно, также можно выводить частичные моменты рекуперации, которые соответственно меньше или равны предельным значениям рекуперации, для каждого электропривода, причем, в случае если общий тормозной момент больше, чем общее предельное значение рекуперации, модуль управления тормозом передает соответствующее давление гидравлического тормоза в тормозную систему. Благодаря системе привода, осуществленной данным образом, возможно оптимальное использование энергии, получаемой в ходе процесса торможения, без ограничения или отрицательного воздействия на устойчивость колес и/или транспортного средства
Для того чтобы установить подходящее давление гидравлического тормоза в тормозной системе может быть предусмотрена выполненная с возможностью переменной регулировки компенсационная емкость для того, чтобы поглощать определенный объем тормозной гидравлической системы. Дополнительная устойчивость транспортного средства в предельных диапазонах также может быть обеспечена благодаря тому, что предусмотрен модуль регулирования тягового усилия, который непрерывно отслеживает устойчивость транспортного средства и, при необходимости, инициирует согласование эффективного приводного момента и предельных значений рекуперации электроприводов с помощью модуля управления рекуперацией.
Кроме этого, задача решается с помощью способа, согласно которому на первом этапе активируют педаль тормоза, и посредством модуля управления приводом определяют предельное значение рекуперации для каждого электропривода и передают его в модуль управления рекуперацией, на втором этапе посредством модуля управления рекуперацией определяют общее предельное значение рекуперации путем соответствующего комбинирования предельных значений рекуперации, на третьем этапе посредством модуля управления тормозом определяют общий тормозной момент в зависимости от требования водителя и передают его на модуль управления рекуперацией, на четвертом этапе посредством модуля управления рекуперацией определяют общий момент рекуперации и, следовательно, также частичные моменты рекуперации для каждого электропривода, и передают их на модуль управления приводом, на пятом этапе посредством модуля управления тормозом создают давление phydr гидравлического тормоза на случай, если общий тормозной момент больше, чем общее предельное значение рекуперации, и передают данное давление phydr гидравлического тормоза в тормозную систему. При этом предпочтительно, если непрерывное согласование предельных значений рекуперации выполняется модулем управления приводом с учетом параметров динамики движения транспортного средства, потенциалов устройства накопления энергии, потенциалов электроприводов и так далее. Дополнительно, требование водителя также может быть частично или полностью сформировано системой помощи водителю, например автоматическая система адаптивного круиз-контроля.
В результате можно частично обойтись без активации педали тормоза.
Изобретение более подробно описывается ниже со ссылками на чертежи, на которых показано:
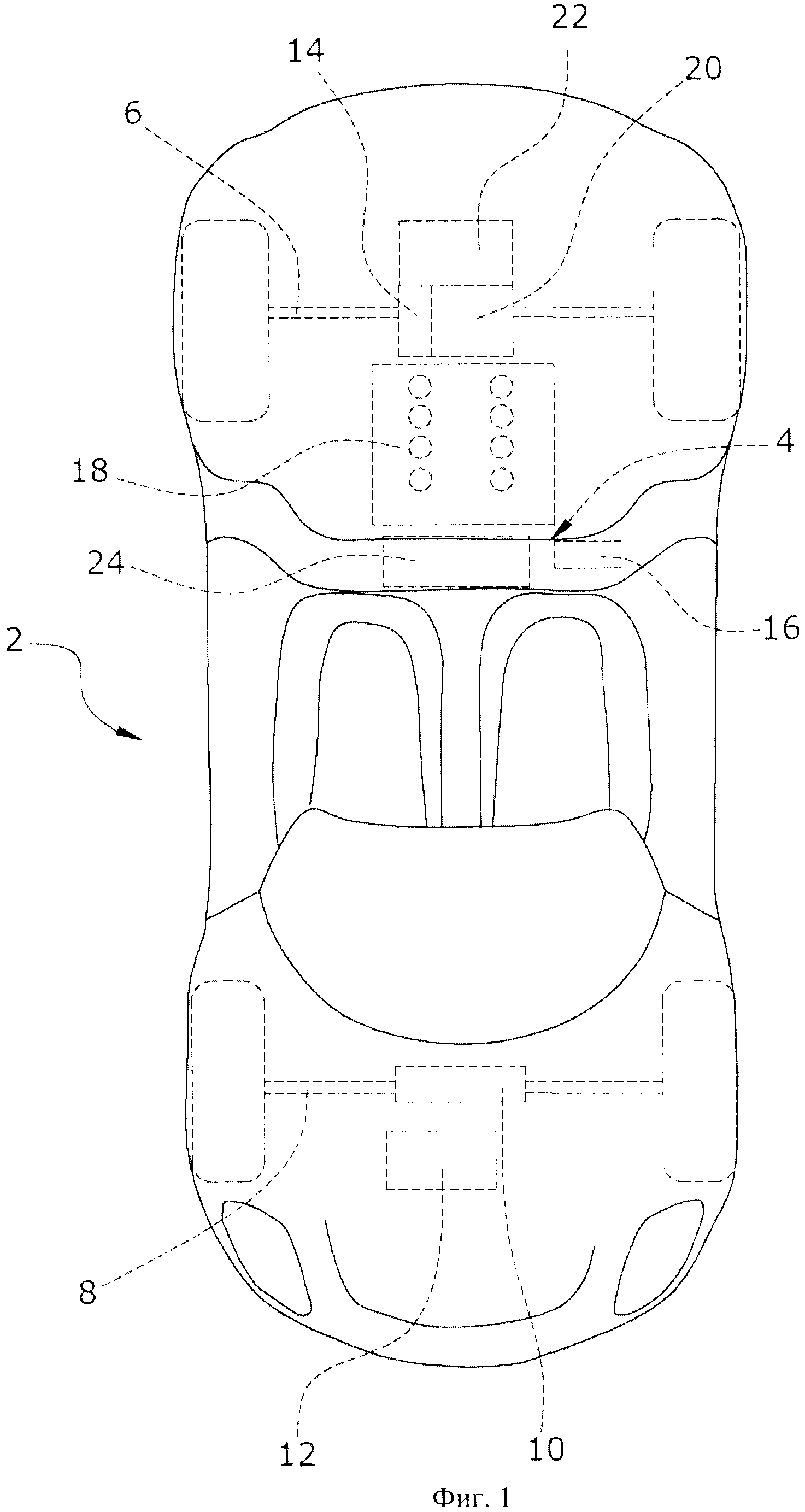
фиг. 1 - схематический вид автомобиля, содержащего систему привода согласно изобретению, и
фиг. 2 - блок-схема управляющего устройства системы привода согласно изобретению.
На фиг. 1 изображен автомобиль 2, содержащий систему 4 привода, изображенную схематически. Автомобиль 2 содержит первую ведущую ось 6, которая выполнена в виде задней колесной оси, и вторую ведущую ось 8, которая выполнена в виде передней колесной оси. В передней области расположен электропривод 10, который опционально соединен с передней колесной осью 8 посредством коробки передач (не показана более подробно). Кроме этого, в передней области расположен блок 12 силовой электроники, который известным образом присоединен в задней области как второй блок 14 силовой электроники к управляющему устройству 16 для того, чтобы приводить в действие соответствующие приводные устройства. В области задней части кузова автомобиля 2 расположены, помимо уже упомянутого блока 14 силовой электроники и управляющего устройства 16, двигатель 18 внутреннего сгорания и второй электропривод 20, которые присоединены известным образом для передачи крутящего момента посредством коробки 22 передач с двойным сцеплением к первой ведущей оси 6, которая выполнена в виде задней колесной оси. Кроме этого, например, в области задней части кузова расположено устройство 24 накопления энергии, которое выполнено в настоящем примере варианта осуществления изобретения в виде блока ионно-литиевых батарей. Однако могут быть предусмотрены и другие устройства накопления энергии, такие как, например, конструкции с маховиком. В таком случае, система 4 привода согласно изобретению обеспечивает, как описано с помощью фиг. 2, оптимальное энергоэффективное распределение крутящего момента, которое осуществляется с учетом предельных значений динамики движения транспортного средства.
На фиг. 2 изображена схема блокировочной цепи, содержащая модули управления управляющего устройства 16. Следует отметить, что термин "модуль управления" не обязательно включает в себя замкнутую систему управления, но, разумеется, также может описывать простую разомкнутую систему управления. Наряду с несколькими модулями управления, которые могут быть предусмотрены в управляющем устройстве 16, три модуля управления являются существенными для настоящего изобретения. С данной целью управляющее устройство 16 содержит, в частности, модуль 26 управления приводом, модуль 28 управления рекуперацией и модуль 30 управления тормозом. Модуль 26 управления приводом в данном изобретении предоставляет предельное значение 32, 34 рекуперации для каждого электропривода 20, 6. Модуль 28 управления рекуперацией соответствующим образом комбинирует данные предельные значения 32, 34 рекуперации и одновременно учитывает граничные условия динамики движения транспортного средства, причем их, например, суммируют, и указанный модуль 28 управления рекуперацией таким образом формирует общее предельное значение 36 рекуперации. Модуль 30 управления тормозом предоставляет общий тормозной момент 42, запрашиваемый водителем 38 посредством педали 40 тормоза или посредством системы помощи водителю. В случае если общий тормозной момент 42, запрашиваемый водителем 38, превышает общее предельное значение 36 рекуперации, модуль 30 управления тормозом создает дополнительное давление Phydraulic гидравлического тормоза и передает его в тормозную систему 44. Однако в настоящем случае общий тормозной момент 42 все таки меньше, в результате чего процесс торможения может происходить полностью посредством рекуперации.
Предпочтительно также предусмотрен модуль 46 регулирования тягового усилия, который непрерывно отслеживает устойчивость транспортного средства и отдельных колес и, при необходимости, приводит в действие модуль 26 управления приводом таким образом, что согласуются крутящие моменты и предельные значения 32, 34 рекуперации ведущих осей 6, 8.
Способ эксплуатации подобной системы 4 привода может быть описан следующим образом. В случае приведения в движение, когда транспортное средство 2 перемещается благодаря сообщению движения посредством педали 45 газа, во время tl активируют педаль 40 тормоза. В модуле 26 управления приводом непрерывно рассчитываются минимальные и максимальные предельные значения крутящего момента, причем в настоящем варианте осуществления лишь предельное значение 32 рекуперации является релевантным для электропривода 10, а его предельное значение 34 рекуперации является релевантным для электропривода 20. Данные предельные значения 32, 34 рекуперации передаются в модуль управления рекуперацией, при этом модуль 28 управления рекуперацией передает общее предельное значение 36 рекуперации. Вслед за этим на третьем этапе модуль 30 управления тормозом по требованию водителя определяет общий тормозной момент 42 и передает его в модуль управления рекуперацией. Затем на четвертом этапе модуль 30 управления тормозом передает общий момент 47 рекуперации в модуль 28 управления рекуперацией, при этом указанный общий момент 47 рекуперации меньше или равен общему предельному значению 36 рекуперации. Модуль 28 управления рекуперацией соответствующим образом разделяет общий момент 47 рекуперации на частичные моменты 48 и 50 рекуперации независимых друг от друга приводов, то есть ведущих осей 6 и 8 - в случае электроприводов 10 и 20. Указанные частичные моменты 48 и 50 рекуперации затем передаются в модуль 26 управления приводом.
В случае если, как изображено на схеме блокировочной цепи, общий тормозной момент 42 больше, чем общее предельное значение 36 рекуперации, модуль 30 управления тормозом создает гидравлическое давление Phydr и передает его в тормозную систему 44. В настоящем варианте осуществления непрерывная адаптация предельных значений рекуперации 32, 34 может быть выполнена посредством модуля (26) управления приводом с учетом параметров динамики движения транспортного средства или потенциалов устройства накопления энергии или электроприводов. При этом параметры динамики движения непрерывно контролируются модулем 46 регулирования тягового усилия.
Реферат
Изобретение относится к системе привода автомобиля. Система привода автомобиля содержит приводные устройства в виде электропривода, управляющее устройство, блок силовой электроники и устройство накопления энергии. Управляющее устройство содержит модуль управления приводом, модуль управления рекуперацией и модуль управления тормозом. Модуль управления приводом предоставляет предельное значение рекуперации для каждого электропривода. Модуль управления рекуперацией комбинирует предельные значения рекуперации и формирует общее предельное значение рекуперации. Модуль управления тормозом предоставляет общий тормозной момент, запрашиваемый водителем или системой помощи водителю. В способе эксплуатации системы привода автомобиля выводят общий момент рекуперации; определяют предельное значение рекуперации для каждого блока привода; определяют максимальное общее предельное значение рекуперации; определяют общий тормозной момент; определяют общий момент рекуперации и создают дополнительное гидравлическое тормозное давление в случае, если общий тормозной момент больше, чем максимальное общее предельное значение рекуперации. Обеспечивается энергоэффективное распределение крутящего момента. 2 н. и 3 з.п. ф-лы, 2 ил.
Формула
управляющее устройство (16) содержит по меньшей мере один модуль (26) управления приводом, модуль (28) управления рекуперацией и модуль (30) управления тормозом,
причем модуль (26) управления приводом предоставляет предельное значение (32, 34) рекуперации для каждого электропривода (20, 10) и осуществляет непрерывную адаптацию предельных значений (32, 34) рекуперации с учетом параметров динамики движения автомобиля, потенциала устройства накопления энергии, потенциала электроприводов,
при этом модуль (28) управления рекуперацией подходящим образом комбинирует данные предельные значения (32, 34) рекуперации с учетом граничных условий динамики движения автомобиля и тем самым формирует максимальное общее предельное значение (36) рекуперации,
причем модуль (30) управления тормозом предоставляет общий тормозной момент (42), запрашиваемый водителем или системой помощи водителю, так что посредством модуля (28) управления рекуперацией выводится общий момент (47) рекуперации, который меньше или равен максимальному общему предельному значению (36) рекуперации, и, следовательно, также выводятся частичные моменты (48, 50) рекуперации, которые соответственно меньше или равны предельному значению (32, 34) рекуперации для каждого электропривода (20, 10), при этом в случае, если общий тормозной момент (42) больше чем максимальное общее предельное значение (36) рекуперации, модуль (30) управления тормозом создает дополнительное гидравлическое тормозное давление Phydr и передает его в тормозную систему (44).
по меньшей мере два независимых приводных устройства (10, 18, 20), выполненных с возможностью приведения по меньшей мере двух независимых друг от друга ведущих осей, причем по меньшей мере одно приводное устройство представляет собой электропривод (10, 20),
систему (12, 14) силовой электроники,
устройство (24) накопления энергии, и
управляющее устройство (16), содержащее модуль (26) управления приводом, выполненный с возможностью предоставления предельного значения (32, 34) рекуперации для каждого электропривода (20, 10),
модуль (28) управления рекуперацией, выполненный с возможностью комбинирования подходящим образом упомянутых предельных значений (32, 34) рекуперации и формирования максимального общего предельного значения (36) рекуперации, и
модуль (30) управления тормозом, выполненный с возможностью предоставления общего тормозного момента (42), запрашиваемого водителем или системой помощи водителю, таким образом, что
посредством модуля (28) управления рекуперацией на основе общего тормозного момента (42) выводится общий момент (47) рекуперации, который меньше или равен максимальному общему предельному значению (36) рекуперации, и также выводятся частичные моменты (48, 50) рекуперации, которые соответственно меньше или равны предельному значению (32, 34) рекуперации, для каждого электропривода (20, 10), при этом
в случае, если общий тормозной момент (42) больше чем максимальное общее предельное значение (36) рекуперации, модуль (30) управления тормозом создает дополнительное гидравлическое тормозное давление Phydr и передает его в тормозную систему (44), причем
на первом этапе активируют педаль (40) тормоза, и посредством модуля (26) управления приводом определяют предельное значение (32, 34) рекуперации для каждого блока привода и передают его в модуль (28) управления рекуперацией, причем посредством модуля (26) управления приводом осуществляют непрерывную адаптацию предельных значений (32, 34) рекуперации с учетом параметров динамики движения автомобиля для обеспечения оптимальных условий динамики движения автомобиля и оптимального контроля над устойчивостью автомобиля,
на втором этапе посредством модуля (28) управления рекуперацией определяют максимальное общее предельное значение (36) рекуперации путем соответствующего комбинирования предельных значений рекуперации с учетом граничных условий динамики движения автомобиля,
на третьем этапе посредством модуля (30) управления тормозом определяют общий тормозной момент (42) в зависимости от запроса водителя и/или системы помощи водителю и передают его в модуль (28) управления рекуперацией,
на четвертом этапе посредством модуля (28) управления рекуперацией на основе упомянутого общего тормозного момента (42) определяют общий момент (47) рекуперации и, соответственно, также определяют частичные моменты (48, 50) рекуперации для каждого электропривода (20, 10), и передают их в модуль (26) управления приводом,
на пятом этапе посредством модуля (30) управления тормозом создают дополнительное гидравлическое тормозное давление Phydr в случае, если общий тормозной момент (42) больше, чем максимальное общее предельное значение (36) рекуперации, и передают данное гидравлическое тормозное давление Phydr в тормозную систему (44).
Комментарии