Устройство рекуперативного управления скоростью транспортного средства - RU2658614C1
Код документа: RU2658614C1
Чертежи


Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству рекуперативного управления скоростью транспортного средства, которое увеличивает скорость вращения входного вала трансмиссии, с которым соединяется электромотор, посредством понижения передачи бесступенчатой трансмиссии, когда существует запрос для увеличения величины рекуперации во время замедления.
Уровень техники
[0002] Традиционно, известно устройство управления гибридным транспортным средством, которое выполняет понижение передачи, чтобы увеличивать передаточное отношение трансмиссии при выполнении рекуперативного управления, для того, чтобы улучшать рекуперативную эффективность (например, ссылка на патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1: Японская выложенная патентная заявка № 2007-50866
Сущность изобретения
Задача, которая должна быть решена изобретением
[0004] Однако, в традиционном устройстве, например, когда рекуперативное управление скоростью выполняется на основе дополнительной операции нажатия педали тормоза в области переключения тормоза, вызванной уменьшением скорости транспортного средства во время совместного рекуперативного управления, инерционный толчок возникает вследствие внезапного изменения в фактической скорости вращения на входе трансмиссии. Т.е., в рекуперативном управлении скоростью, выполняемом для того, чтобы улучшать рекуперативную эффективность, выполняется понижение передачи, в котором командное значение скорости вращения на входе трансмиссии быстро повышается по направлению к целевой скорости вращения рекуперативного торможения, и, после того как целевая скорость вращения достигается, выполняется повышение передачи, в котором командное значение скорости вращения на входе трансмиссии быстро понижается в соответствии с целевой скоростью вращения. Кроме того, если рекуперативное управление скоростью устанавливается в управление трансмиссией с обратной связью, последующая реакция фактической скорости вращения на входе трансмиссии относительно командного значения скорости вращения на входе трансмиссии задерживается. Следовательно, фактическая скорость вращения на входе трансмиссии быстро увеличивается, затем поворачивает обратно и быстро уменьшается, вызывая перерегулирование, в котором фактическая скорость вращения на входе трансмиссии превышает целевую скорость вращения. С этим быстрым изменением в фактической скорости вращения на входе трансмиссии инерционный толчок происходит поблизости от разворота повышения/падения скорости вращения на входе трансмиссии, так что существует проблема, что возникает дискомфорт у водителя, который поддерживает постоянную операцию торможения после дополнительного нажатия педали тормоза.
[0005] Принимая во внимание проблемы, описанные выше, целью настоящего изобретения является предоставление устройства рекуперативного управления скоростью транспортного средства, которое предотвращает возникновение дискомфорта у водителя, который поддерживает постоянную операцию запроса после запроса повышения, при выполнении рекуперативного управления скоростью на основе запроса для повышения величины рекуперации в области переключения тормоза вследствие уменьшения скорости транспортного средства во время замедления.
Средство реализации цели
[0006] Для того, чтобы реализовать цель, описанную выше, настоящее изобретение содержит бесступенчатую трансмиссию и электрический мотор, который соединяется со стороной входного вала бесступенчатой трансмиссии и который регенерирует энергию во время замедления.
Это транспортное средство снабжается контроллером, который, когда существует запрос для увеличения в величине рекуперации во время замедления, выполняет рекуперативное управление скоростью для понижения передачи бесступенчатой трансмиссии в сторону низкого передаточного отношения и увеличение скорости вращения входного вала трансмиссии, с которым соединяется электромотор.
Контроллер делает темп изменения скорости вращения для скорости вращения на входе трансмиссии меньше, чем при выполнении рекуперативного управления скоростью на основе запроса для увеличения величины рекуперации в области рекуперативного торможения, при выполнении рекуперативного управления скоростью на основе запроса для увеличения величины рекуперации в области переключения тормоза, в которой рекуперативное торможение переключается на механическое торможение вследствие уменьшения скорости транспортного средства
Эффекты изобретения
[0007] Следовательно, контроллер накладывает ограничение на темп изменения скорости вращения для скорости вращения на входе трансмиссии при выполнении рекуперативного управления скоростью для увеличения скорости вращения на входе трансмиссии на основе запроса для увеличения величины рекуперации в области переключения тормоза, в которой рекуперативное торможение переключается на механическое торможение, вследствие уменьшения скорости транспортного средства.
Т.е., в рекуперативном управлении скоростью на основе запроса для увеличения величины рекуперации, выполняется понижение передачи, в котором скорость вращения на входе трансмиссии увеличивается по направлению к целевой скорости вращения. Однако, после того как скорость вращения на входе трансмиссии достигает целевой скорости вращения рекуперативного торможения, которое имеет характеристику уменьшения со временем в области переключения тормоза, необходимо понижать скорость вращения на входе трансмиссии после достижения целевой скорости вращения. Накладывая ограничение на темп изменения скорости вращения при выполнении рекуперативного управления скоростью на основе запроса для увеличения величины рекуперации в такой области переключения тормоза, темп изменения скорости вращения для скорости вращения на входе трансмиссии изменяется постепенно. Соответственно, даже если существует задержка последующей реакции вследствие управления трансмиссией с обратной связью, представляется возможным пресекать перерегулирование, в котором фактическая скорость вращения на входе трансмиссии превышает целевую скорость вращения, и возникновение инерционного толчка поблизости от точки, где скорость вращения на входе трансмиссии переключается с повышения на понижение, также пресекается.
В результате, представляется возможным предотвращать возникновение дискомфорта у водителя, который поддерживает постоянную операцию запроса после запроса увеличения, при выполнении рекуперативного управления скоростью на основе запроса для увеличения величины рекуперации в области переключения тормоза вследствие уменьшения скорости транспортного средства во время замедления.
Краткое описание чертежей
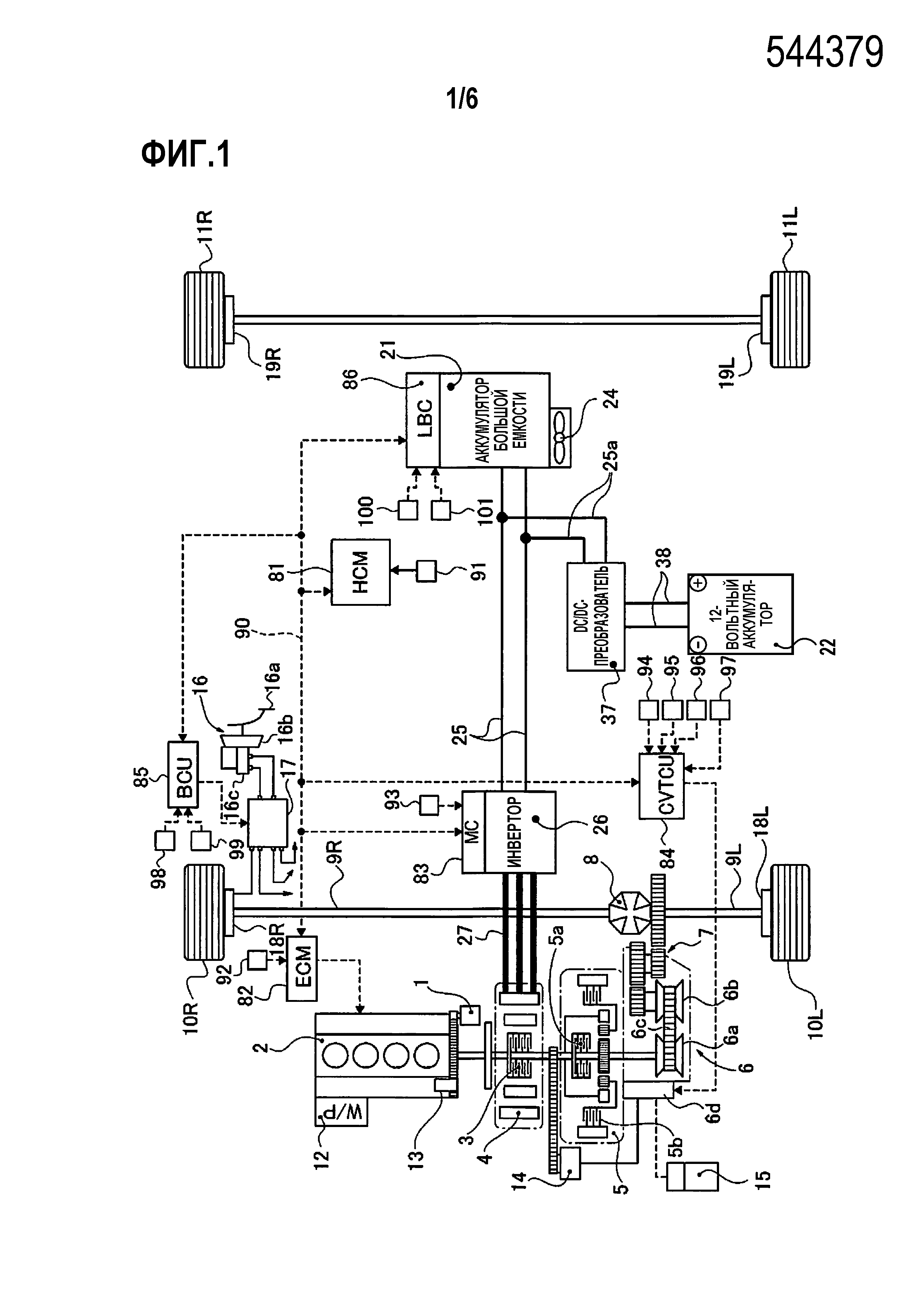
[0008] Фиг. 1 - это общий вид системы, иллюстрирующий FF-гибридное транспортное средство, к которому применяется устройство рекуперативного управления скоростью первого варианта осуществления.
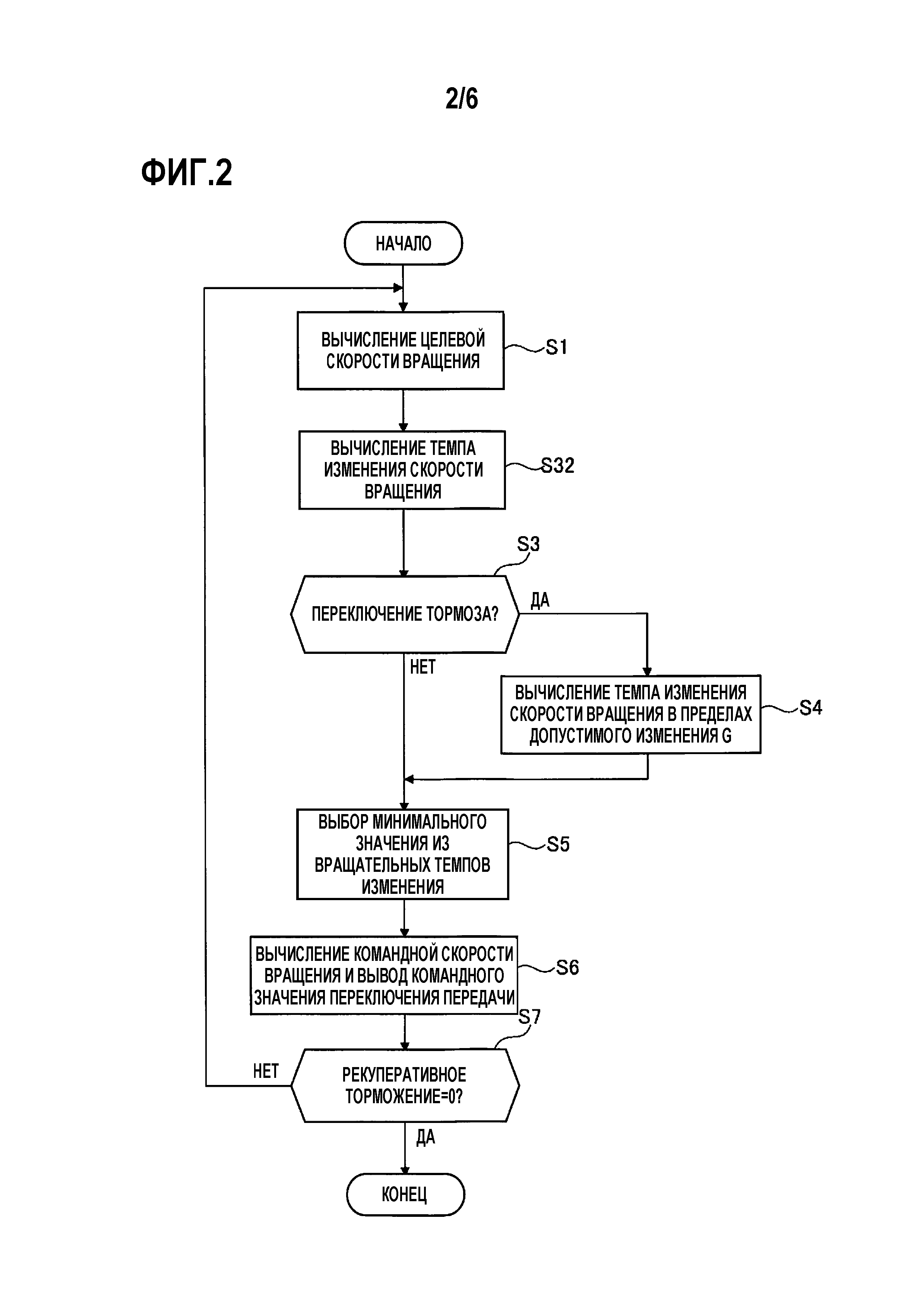
Фиг. 2 - блок-схема последовательности операций, иллюстрирующая этапы процесса рекуперативного управления скоростью, который выполняется посредством модуля гибридного управления первого варианта осуществления.
Фиг. 3 - график характеристики, иллюстрирующий рекуперативную эффективность и линию оптимальной эффективности α, которая становится основной для определения соотношения между скоростью вращения и рекуперативным крутящим моментом во время рекуперации, в процессе рекуперативного управления скоростью первого варианта осуществления.
Фиг. 4 - график относительной характеристики, иллюстрирующий соотношение между скоростью вращения мотора и величиной рекуперации посредством вращения с оптимальной эффективностью, которое используется для вычисления целевой скорости вращения в процессе рекуперативного управления скоростью первого варианта осуществления.
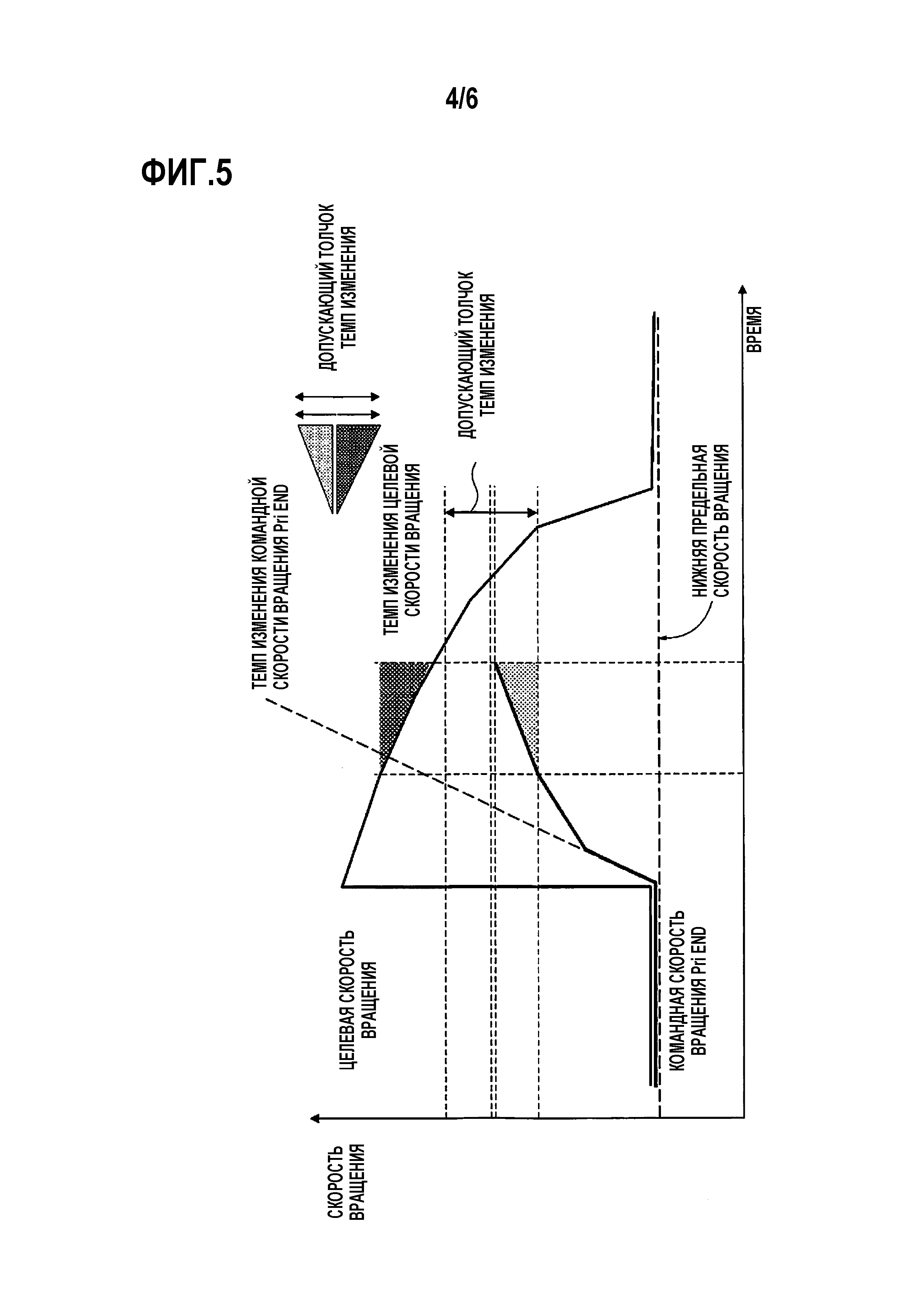
Фиг. 5 - график характеристики, иллюстрирующий концептуальную основу для вычисления темпа изменения командной скорости вращения Pri end, который падает в пределах допускающего толчок темпа изменения, в области переключения тормоза в процессе рекуперативного управления скоростью согласно первому варианту осуществления.
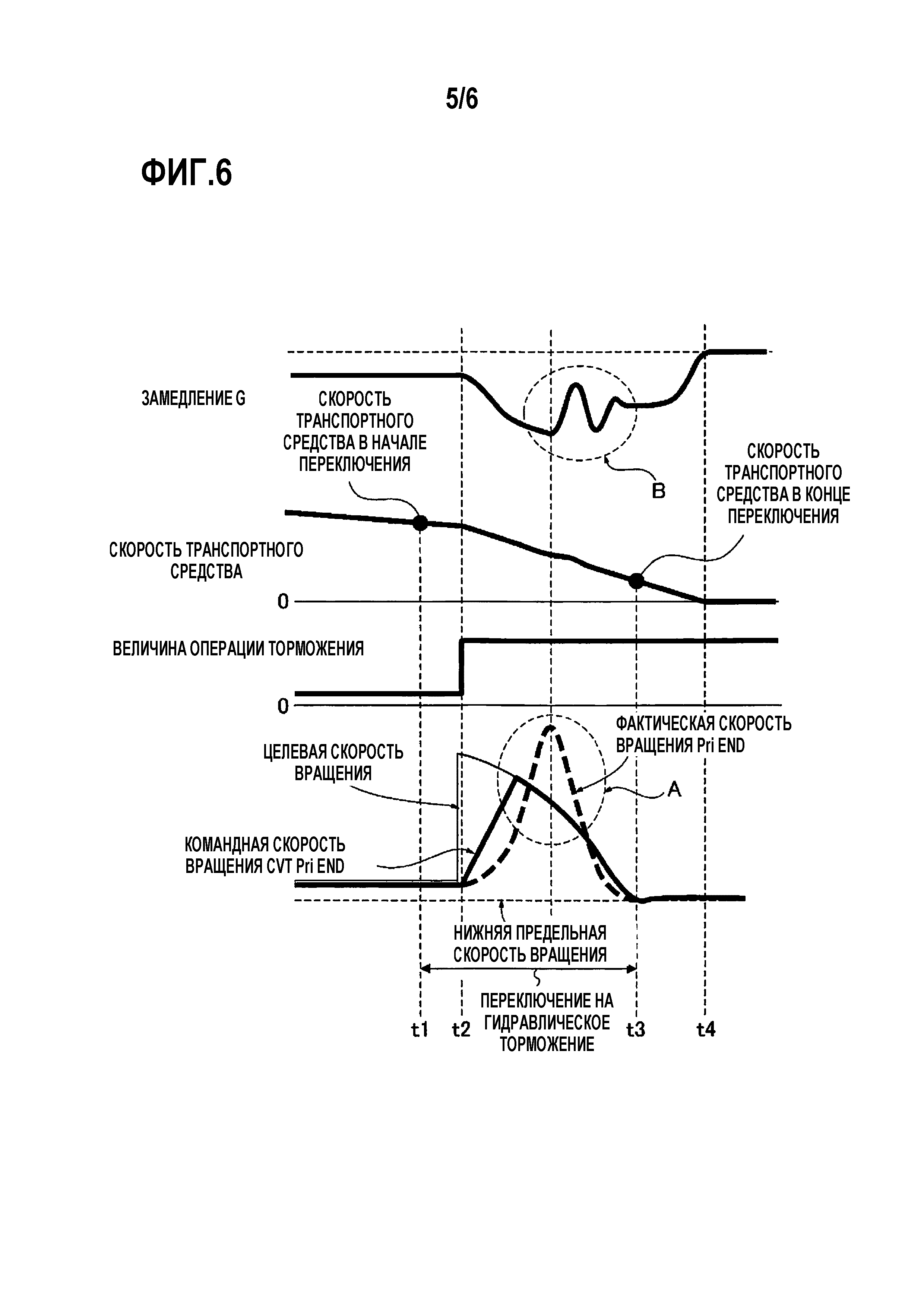
Фиг. 6 - временная диаграмма, иллюстрирующая характеристику каждого из замедления G, скорости транспортного средства, величины срабатывания тормоза, командной скорости вращения Pri end, фактической скорости вращения Pri end, целевой скорости вращения и нижней предельной скорости вращения, при выполнении рекуперативного управления скоростью на основе дополнительной операции нажатия педали тормоза в области переключения тормоза вследствие уменьшения скорости транспортного средства, в процессе рекуперативного управления скоростью сравнительного примера.
Фиг. 7 - временная диаграмма, иллюстрирующая характеристику каждого из замедления G, скорости транспортного средства, величины срабатывания тормоза, командной скорости вращения Pri end, фактической скорости вращения Pri end, целевой скорости вращения и нижней предельной скорости вращения, при выполнении рекуперативного управления скоростью на основе дополнительной операции нажатия педали тормоза в области переключения тормоза вследствие уменьшения скорости транспортного средства, в процессе рекуперативного управления скоростью первого варианта осуществления.
Осуществление изобретения
[0009] Предпочтительный вариант осуществления для реализации устройства рекуперативного управления скоростью транспортного средства настоящего изобретения описывается ниже на основе первого варианта осуществления, проиллюстрированного на чертежах.
Первый вариант осуществления
[0010] Сначала описывается конфигурация.
Устройство рекуперативного управления скоростью согласно первому варианту осуществления применяется к FF-гибридному транспортному средству (один пример транспортного средства), имеющему левое и правое передние колеса в качестве ведущих колес и оснащенному бесступенчатой трансмиссией ременного типа в качестве бесступенчатой трансмиссии. "Общая конфигурация системы" и "конфигурация процесса рекуперативного управления скоростью" будут отдельно описаны относительно конфигурации устройства рекуперативного управления скоростью для FF-гибридных транспортных средств в первом варианте осуществления.
[0011] [Общая конфигурация системы]
Фиг. 1 иллюстрирует общий вид системы FF-гибридного транспортного средства, к которому применяется устройство рекуперативного управления скоростью первого варианта осуществления. Общая конфигурация системы FF-гибридного транспортного средства будет описана ниже на основе фиг. 1.
[0012] Система приведения в движение FF-гибридного транспортного средства снабжается поперечно расположенным двигателем 2, первой муфтой 3 сцепления (обозначенной аббревиатурой "CL1"), мотор-генератором 4 (обозначенным аббревиатурой "MG"), второй муфтой 5 сцепления (обозначенной аббревиатурой "CL2") и бесступенчатой трансмиссией 6 ременного типа (обозначенной аббревиатурой "CVT"), как проиллюстрировано на фиг. 1. Выходной вал бесступенчатой трансмиссии 6 ременного типа соединяется с возможностью передачи приводного усилия с левым и правым передними колесами 10R, 10L, через механизм 7 конечной понижающей передачи, дифференциальную передачу 8 и левый и правый приводные валы 9R, 9L. Левое и правое задние колеса 11R, 11L выполнены в качестве ведомых колес.
[0013] Поперечно расположенный двигатель 2 является двигателем, расположенным с находящимся впереди стартерным мотором 1 и направлением коленчатого вала в поперечном направлении транспортного средства, содержащим электрический водяной насос 12 и датчик 13 вращения коленчатого вала, который обнаруживает обратное вращение поперечно расположенного двигателя 2. Поперечно расположенный двигатель 2 содержит, в качестве способов запуска двигателя, "режим MG-запуска", который выполняет проворачивание коленчатого вала посредством мотор-генератора 4, в то же время зацепляя с проскальзыванием первую муфту 3 сцепления, и "режим запуска от стартера", который выполняет проворачивание коленчатого вала посредством стартерного мотора 1, который имеет 12-вольтный аккумулятор 22 в качестве источника питания. "Режим запуска от стартера" выбирается, только когда удовлетворяются ограниченные условия, такие как очень низкие температурные условия.
[0014] Мотор-генератор 4 является трехфазным синхронным мотором переменного тока с постоянными магнитами, который соединен с поперечно расположенным двигателем 2 через первую муфту 3 сцепления. Мотор-генератор 4 использует аккумулятор 21 большой емкости, описанный ниже, в качестве источника питания, и инвертор 26, который преобразует постоянный ток в трехфазный переменный ток во время снабжения энергией и преобразует трехфазный переменный ток в постоянный ток во время рекуперации, соединяется с катушкой статора через AC-проводку 27. Первая муфта 3 сцепления, которая вставлена между поперечно расположенным двигателем 2 и мотор-генератором 4, является приводимой в действие гидравлическим образом сухой или мокрой многодисковой муфтой, в которой полное зацепление/зацепление с проскальзыванием/расцепление управляются посредством гидравлического давления первой муфты.
[0015] Вторая муфта 5 сцепления является приводимой в действие гидравлическим образом сухой многодисковой фрикционной муфтой, вставленной между мотор-генератором 4 и левым и правым передними колесами 10R, 10L, которые являются ведущими колесами, в которой полное зацепление/зацепление с проскальзыванием/расцепление управляются посредством гидравлического давления второй муфты. Вторая муфта 5 сцепления в первом варианте осуществления конфигурируется посредством отведения муфты 5a переднего хода и обратного тормоза 5b, предусмотренного в механизме прямого/обратного переключения, выполненного посредством планетарных шестерней. Т.е., муфта 5a переднего хода используется в качестве второй муфты 5 сцепления во время движения передним ходом, а обратный тормоз 5b используется в качестве второй муфты 5 сцепления во время движения задним ходом.
[0016] Бесступенчатая трансмиссия 6 ременного типа содержит первичный шкив 6a, вторичный шкив 6b и ремень 6c, который обмотан вокруг двух шкивов 6a, 6b. Кроме того, эта бесступенчатая трансмиссия является трансмиссией, которая добивается бесступенчатого передаточного отношения трансмиссии посредством изменения диаметра намотки ремня 6c посредством первичного давления и вторичного давления, которые подаются в первичную масляную камеру и вторичную масляную камеру. Бесступенчатая трансмиссия 6 ременного типа содержит, в качестве гидравлических источников энергии, главный масляный насос 14 (механический привод), вращательным образом приводимый в действие валом мотора мотор-генератора 4 (=входной вал трансмиссии), и вспомогательный масляный насос 15 (привод мотора), который используется в качестве вспомогательного насоса. Бесступенчатая трансмиссия содержит блок 6d клапана управления, который использует линейное давление PL, создаваемое посредством регулирования давления на выходе насоса от гидравлического источника энергии, в качестве исходного давления, чтобы создавать давление первой муфты, давление второй муфты, а также первичное давление и вторичное давление бесступенчатой трансмиссии 6 ременного типа. Масляный насос, который является целью для нижней предельной скорости вращения первого варианта осуществления, является главным масляным насосом 14, который вращательным образом приводится в действие посредством мотор-генератора 4 (электрического мотора), который установлен в качестве источника приведения в движение для движения.
[0017] Первая муфта 3 сцепления, мотор-генератор 4 и вторая муфта 5 сцепления конфигурируют так называемую гибридную систему приведения в движение с одним мотором и двумя муфтами сцепления, имеющую, в качестве основных режимов приведения в движение, "EV-режим", "HEV-режим" и "WSC-режим".
"EV-режим" является режимом электрического транспортного средства, в котором первая муфта 3 сцепления расцеплена, а вторая муфта 5 сцепления сцеплена, и в котором мотор-генератор 4 является единственным источником приведения в движение; движение посредством такого "EV-режима" называется "EV-движением". "HEV-режим" является режимом гибридного транспортного средства, в котором обе муфты 3 и 5 зацеплены и в котором поперечно расположенный двигатель 2 и мотор-генератор 4 являются источниками приведения в движение; движение посредством "HEV-режима" называется "HEV-движением". "WSC-режим" является режимом зацепления с проскальзыванием для CL2, в котором скорость вращения мотора мотор-генератора 4 управляется в "HEV-режиме" или "EV-режиме", и вторая муфта 5 сцепления зацепляется с проскальзыванием с перегрузочной способностью по моменту зацепления, соответствующей требуемой движущей силе. Когда транспортное средство останавливается, устанавливая "WSC-режим", в котором вторая муфта 5 сцепления сцепляется с проскальзыванием, представляется возможным вращать мотор-генератор 4.
[0018] Тормозная система FF-гибридного транспортного средства содержит блок 16 приведения в действие тормоза, блок 17 управления давлением тормозной жидкости, блоки 18R и 18L тормозов левого и правого передних колес, блоки 19R и 19L тормозов левого и правого задних колес. В этой тормозной системе, когда мотор-генератор 4 выполняет рекуперацию во время операции торможения, совместное рекуперативное управление выполняется относительно запрошенного тормозного усилия на основе задействования педали, в соответствии с чем, фрагмент, полученный вычитанием рекуперативного торможения из требуемого тормозного усилия, распределяется гидравлическому торможению. Т.е., в совместном рекуперативном управлении, требуемое тормозное усилие задается как сумма рекуперативного торможения и гидравлического торможения, так что когда рекуперативное торможение уменьшается, гидравлическое торможение увеличивается.
[0019] Блок 16 приведения в действие тормоза содержит педаль 16a тормоза, усилитель 16b отрицательного давления, который использует отрицательное давление на впуске поперечно расположенного двигателя 2, и главный цилиндр 16c и т.п. Этот блок 16 рекуперативного совместного торможения формирует предварительно определенное давление главного цилиндра согласно силе нажатия на педаль тормоза от водителя, которая прикладывается к педали 16a тормоза, и является просто сконфигурированным блоком, который не использует электрический усилитель.
[0020] Блок 17 управления давлением тормозной жидкости содержит, хотя не показано, электрический масляный насос, соленоидный клапан для повышения давления, соленоидный клапан для понижения давления, клапан для переключения масляного канала и т.п. Посредством управления для блока 17 управления давлением тормозной жидкости посредством блока 85 управления тормозом 85 вызываются функция формирования гидравлического давления колесного цилиндра, когда тормоз не задействуется, и функция регулировки гидравлического давления колесного цилиндра, когда тормоз задействуется. Примеры управлений, которые используют функцию создания гидравлического давления, когда тормоз не задействуется, включают в себя регулирование тягового усилия (TCS-регулирование), управление поведением транспортного средства (VDC-управление), управление аварийным тормозом (автоматическое управление тормозом) и т.п. Примеры управлений, которые используют функцию регулировки гидравлического давления во время операции торможения, включают в себя совместное рекуперативное управление, антиблокировочное управление тормозом (ABS-управление) и т.п.
[0021] Тормозные блоки 18R и 18L левого и правого передних колес соответственно предусматриваются на левом и правом передних колесах 10R и 10L, и тормозные блоки 19R и 19L левого и правого задних колес соответственно предусматриваются на левом и правом задних колесах 11R и 11L и прикладывают гидравлическое тормозное усилие к каждому из колес. Тормозные блоки 18R, 18L, 19R и 19L снабжаются колесными цилиндрами, которые не показаны, к которым подается давление тормозной жидкости, создаваемое блоком 17 управления давлением тормозной жидкости.
[0022] Система подачи энергии FF-гибридного транспортного средства снабжается аккумулятором 21 большой емкости в качестве источника питания мотор-генератора 4, и 12-вольтным аккумулятором 22 в качестве источника питания нагрузки системы 12В, как проиллюстрировано на фиг. 1.
[0023] Аккумулятор 21 высокой емкости является аккумуляторной батарей, которая устанавливается в качестве источника питания мотор-генератора 4, и, например, литиево-ионный аккумулятор, в котором модуль гальванического элемента, сконфигурированный из многочисленных элементов, устанавливается внутри корпуса аккумуляторной батареи, используется для этого. Распределительная коробка, которая собирает в одно целое релейную схему для выполнения подачи/отсечки/распределения большого тока, встраивается в этот аккумулятор 21 большой емкости, и к нему дополнительно присоединяется блок 24 охлаждающего вентилятора, имеющий функцию охлаждения аккумулятора, и контроллер 86 литиевого аккумулятора, который наблюдает за состоянием заряда аккумулятора (SOC аккумулятора) и температурой аккумулятора.
[0024] Аккумулятор 21 большой емкости и мотор-генератор 4 соединяются с DC-электропроводкой 25 и инвертором 26 через AC-электропроводку 27. Контроллер 83 мотора для выполнения управления снабжением энергией/рекуперацией присоединяется к инвертору 26. Т.е., инвертор 26 преобразует постоянный ток от DC-электропроводки 25 в трехфазный переменный ток для AC-электропроводки 27 во время снабжения электроэнергией, когда мотор-генератор 4 приводится в действие посредством разряда аккумулятора 21 большой емкости. Кроме того, инвертор преобразует трехфазный переменный ток из AC-электропроводки 27 в постоянный ток для DC-электропроводки 25, во время рекуперации для зарядки аккумулятора 21 большой емкости с выработкой энергии посредством мотор-генератора 4.
[0025] 12-вольтный аккумулятор 22 является аккумуляторной батареей, установленной в качестве источника питания для нагрузки системы в 12В, включающей в себя стартерный мотор и вспомогательные механизмы; например, используется свинцовый аккумулятор, установленный на транспортном средстве с двигателем внутреннего сгорания или т.п. Аккумулятор 21 большой емкости и 12-вольтный аккумулятор 22 соединяются с DC-ветвью электропроводки 25a, DC/DC-преобразователем 37 и электропроводкой 38 аккумулятора. DC/DC-преобразователь 37 преобразует несколько сотен вольт от аккумулятора 21 большой емкости в 12В, который выполнен с возможностью управлять величиной заряда 12-вольтного аккумулятора 22 посредством управления DC/DC-преобразователем 37 с помощью модуля 81 гибридного управления.
[0026] Электронная система управления FF-гибридного транспортного средства содержит модуль 81 гибридного управления (обозначенный аббревиатурой "HCM") в качестве электронного блока управления, который имеет интегрированную функцию управления, чтобы соответствующим образом управлять потреблением энергии всего транспортного средства, как проиллюстрировано на фиг. 1. Модуль 82 управления двигателем (обозначенный аббревиатурой "ECM"), контроллер 83 мотора (обозначенный аббревиатурой "MC") и блок 84 управления CVT (обозначенный аббревиатурой "CVTCU") предусматриваются в качестве других электронных блоков управления. Кроме того, предусматриваются блок 85 управления тормозом (обозначенный аббревиатурой "BCU") и контроллер 86 литиевого аккумулятора (обозначенный аббревиатурой "LBC"). Эти электронные блоки 81, 82, 83, 84, 85, 86 управления соединяются так, чтобы они могли обмениваться двухсторонней информацией посредством CAN-линии 90 связи (CAN - локальная сеть контроллеров) и совместно использовать информацию друг с другом.
[0027] Модуль 81 гибридного управления выполняет различные встроенные управления на основе входной информации от других электронных блоков 82, 83, 84, 85 и 86 управления и переключателя 91 зажигания и т.п.
[0028] Модуль 82 управления двигателем получает входную информацию от модуля 81 гибридного управления, датчика 92 скорости вращения двигателя и т.п. Модуль управления двигателем выполняет управление запуском, управление впрыском топлива, управление зажиганием, управление прекращением подачи топлива, управление вращением на холостом ходу двигателя и т.д. для поперечно расположенного двигателя 2 на основе этой входной информации.
[0029] Контроллер 83 мотора получает входную информацию от модуля 81 гибридного управления, датчика 93 скорости вращения мотора и т.п. Контроллер мотора выполняет управление холостым ходом мотора, управление медленным вращением мотора, управление рекуперацией и управление снабжением электропитанием мотор-генератора 4, согласно командам управления для инвертора 26, на основе этой входной информации.
[0030] Блок 84 управления CVT получает входную информацию от модуля 81 гибридного управления, датчика 94 величины открытия позиции акселератора, датчика 95 скорости транспортного средства, переключателя 96 замедления, датчика 97 температуры масла ATF и т.п. Блок управления CVT выполняет управление гидравлическим давлением зацепления для первой муфты 3 сцепления, управление гидравлическим давлением зацепления для второй муфты 5 сцепления, управление гидравлическим давлением переключения передач бесступенчатой трансмиссии 6 ременного типа посредством первичного давления и вторичного давления, и т.п., выводя команды управления блоку 6d клапана управления на основе этой входной информации.
[0031] Блок 85 управления тормозом получает входную информацию от модуля 81 гибридного управления, переключателя 98 тормоза, датчика 99 хода тормоза и т.п. Блок управления тормозом выводит команды управления блоку 17 управления давлением тормозной жидкости на основе этой входной информации. Блок 85 управления тормозом выполняет TCS-управление, VDC-управление, автоматическое управление тормозом, совместное рекуперативное управление, ABS-управление и т.п.
[0032] Контроллер 86 литиевого аккумулятора управляет SOC аккумулятора, температурой аккумулятора и т.п. для аккумулятора 21 большой емкости на основе входной информации от датчика 100 напряжения аккумулятора, датчика 101 температуры аккумулятора и т.п.
[0033] [Конфигурация процесса рекуперативного управления скоростью]
Фиг. 2 - это блок-схема последовательности операций, иллюстрирующая этапы процесса рекуперативного управления скоростью, который выполняется посредством модуля 81 гибридного управления (контроллера) первого варианта осуществления. Каждый этап на фиг. 2, показывающий конфигурацию процесса рекуперативного управления скоростью, в которой процесс начинается на основе запроса начала совместного рекуперативного управления, и в которой процесс заканчивается, когда рекуперативное торможение становится нулевым вследствие переключения тормоза, будет описан ниже.
[0034] На этапе S1, следом за началом процесса на основе запроса начала совместного рекуперативного управления, или определения на этапе S7, что рекуперативное торможение > 0, вычисляется целевая скорость вращения согласно наилучшей рекуперативной эффективности относительно рекуперативного крутящего момента, и этапы переходят к этапу S2.
Например, соотношение между рекуперативным моментом и скоростью вращения становится наилучшей рекуперативной эффективностью, когда находится на линии наилучшей эффективности α, как проиллюстрировано на фиг. 3. Это соотношение, перечерченное как соотношение между величиной рекуперации и скоростью вращения мотора, является характеристикой, проиллюстрированной на фиг. 4; когда определяется величина рекуперации (= рекуперативный крутящий момент х скорость вращения), также определяется скорость вращения мотора (= целевая скорость вращения), которая добивается наилучшей рекуперативной эффективности. Если величина рекуперации изменяется, скорость вращения наилучшей рекуперативной эффективности также будет изменяться; когда величина рекуперации изменяется от небольшой до большой, наилучшая рекуперативная эффективность может быть получена, когда скорость вращения мотора (= целевая скорость вращения) устанавливается в высокую скорость вращения; и когда величина рекуперации изменяется с большой на небольшую, наилучшая рекуперативная эффективность может быть получена, когда скорость вращения мотора (=целевая скорость вращения) устанавливается в низкую скорость вращения. Следовательно, в первом варианте осуществления, в то время как величина срабатывания тормоза является небольшой, и величина рекуперации является небольшой, например, целевая скорость вращения в рекуперативном управлении скоростью задается слегка выше нижней предельной скорости вращения. Дополнительно, если существует дополнительная операция нажатия педали тормоза в области переключения тормоза, и величина рекуперации увеличивается, тогда целевая скорость вращения увеличивается немедленно со скорости вращения перед дополнительным нажатием; после этого, если рекуперативный крутящий момент уменьшается, сопровождая переключение тормоза, тогда целевая скорость вращения постепенно уменьшается по направлению к нижней предельной скорости вращения. "Нижняя предельная скорость вращения" должна быть скоростью вращения, которая определяется как скорость вращения насоса для главного масляного насоса 14 для получения объема масла для создания необходимого гидравлического давления для бесступенчатой трансмиссии 6 ременного типа во время замедления. Здесь, "необходимое гидравлическое давление" является гидравлическим давлением, с помощью которого представляется возможным переключать передачу во время замедления (переключение для возврата к низкой передаче) с подходящим прижимным усилием CVT.
[0035] На этапе S2, следом за вычислением целевой скорости вращения на этапе S1, вычисляется темп изменения командной скорости вращения Pri end, который обеспечивает реакцию на целевую скорость вращения, и этапы переходят к этапу S3.
Затем, при увеличении целевой скорости вращения от нижней предельной скорости вращения немедленно, темп изменения увеличения скорости вращения Pri end предоставляется как темп изменения увеличения, когда скорость понижения передачи бесступенчатой трансмиссии 6 ременного типа посредством гидравлического давления в это время является максимальной скоростью трансмиссии. При постепенном уменьшении от целевой скорости вращения до нижней предельной скорости вращения темп изменения уменьшения командной скорости вращения Pri end предоставляется как темп изменения командной скорости вращения Pri end для скорости трансмиссии, которая следует целевой скорости вращения, повышая передачу бесступенчатой трансмиссии 6 ременного типа.
[0036] На этапе S3, следом за вычислением темпа изменения скорости вращения на этапе S2, определяется, находится он или нет в области переключения тормоза, в котором тормозное усилие, которое добивается требуемого тормозного усилия, переключается с рекуперативного торможения на гидравлическое торможение вследствие уменьшения скорости транспортного средства. Если ДА (область переключения тормоза), тогда этапы переходят к этапу S4; а если НЕТ (область рекуперативного торможения), тогда этапы переходят к этапу S5.
Здесь, область переключения тормоза определяется, когда скорость транспортного средства становится меньше или равной скорости транспортного средства для начала переключения тормоза вследствие низкой скорости транспортного средства, и выдается команда переключения тормоза. Кроме того, в области переключения тормоза, рекуперативное торможение постепенно уменьшается от скорости транспортного средства для начала переключения тормоза до скорости транспортного средства для окончания переключения тормоза, и выполняется совместное управление, в котором величина уменьшения рекуперативного торможения компенсируется величиной увеличения гидравлического торможения.
[0037] На этапе S4, следом за определением области переключения тормоза на этапе S3, вычисляется темп изменения командной скорости вращения Pri end, который будет находиться в пределах допустимого изменения G, и этапы переходят к этапу S5.
Здесь, что касается "темпа изменения командной скорости вращения Pri end", значение темпа изменения скорости вращения, которое обеспечивает реакцию, вычисляется тем же образом, что и на этапе S2, с момента, когда область переключения тормоза начинается, до момента, когда выполняется дополнительная операция нажатия педали тормоза. С другой стороны, когда выполняется дополнительная операция нажатия педали тормоза, значение темпа изменения скорости вращения вычисляется согласно идее, что инерционный толчок может быть пресечен, если темп изменения скорости вращения, полученный сложением темпа изменения командной скорости вращения Pri end и темпа изменения целевой скорости вращения, меньше или равен допускающему толчок темпу изменения, как проиллюстрировано на фиг. 5. Следовательно, при выполнении рекуперативного управления скоростью на основе дополнительной операции нажатия педали тормоза в области переключения тормоза, темп изменения командной скорости вращения Pri end задается, чтобы быть вычисленным значением, которое меньше или равно темпу изменения, полученному вычитанием темпа изменения целевой скорости вращения с характеристикой целевой скорости вращения на основе уменьшения рекуперативного крутящего момента из допускающего толчок темпа изменения, как показано в последующей формуле (1).
(Темп изменения командной скорости вращения Pri end) ≤ (допускающий толчок темп изменения) -(темп изменения целевой скорости вращения) … (1)
"Допускающий толчок темп изменения" дается в качестве предельного значения, посредством чего, колебание замедления G транспортного средства, сопровождающее изменение в скорости вращения вследствие роста и падения фактической скорости вращения Pri end, будет в пределах допустимого колебания G, которое не вызывает дискомфорт у водителя. "Темп изменения командной скорости вращения Pri end" может также быть определен, учитывая задержку реакции для реакции гидравлического давления и механической реакции, или т.п.
[0038] На этапе S5, следом за определением области рекуперативного торможения на этапе S4, или вычислением темпа изменения командной скорости вращения Pri end на этапе S4, выбирается минимальное значение из темпа изменения командной скорости вращения Pri end, вычисленного на этапе S2, и темпа изменения командной скорости вращения Pri end, вычисленного на этапе S4, и этапы переходят к этапу S6.
Т.е., когда определяется область рекуперативного торможения, поскольку темп изменения командной скорости вращения Pri end не вычисляется на этапе S4, выбирается темп изменения командной скорости вращения Pri end, вычисленный на этапе S2. С другой стороны, если темп изменения командной скорости вращения Pri end вычисляется на этапе S4 на основе определения, что это область переключения тормоза, из двух темпов изменения командной скорости вращения Pri end будет выбран темп изменения с меньшим вычисленным значением.
[0039] На этапе S6, следом за выбором минимального значения темпа изменения командной скорости вращения Pri end на этапе S5, текущая командная скорость вращения Pri end вычисляется из предыдущей командной скорости вращения Pri end и темпа изменения командной скорости вращения Pri end, выбранного на этапе S5. Затем, командное значение для переключения передачи, чтобы получать текущую командную скорость вращения Pri end, выводится из блока 84 управления CVT, и этапы переходят к этапу S7.
[0040] На этапе S7, следом за вычислением командной скорости вращения Pri end и выводом командного значения для переключения передачи на этапе S6, определяется, становится или нет нулевым рекуперативное торможение. Если ДА (рекуперативное торможение=0), тогда этапы переходят к концу, а если НЕТ (рекуперативное торможение ≠ 0), тогда этапы возвращаются к этапу S1.
[0041] Далее описываются действия.
"Действие процесса рекуперативного управления скоростью", "действие рекуперативного управления скоростью" и "характерное действие рекуперативного управления скоростью" будут отдельно описаны, относительно действий устройства рекуперативного управления скоростью для FF-гибридных транспортных средств согласно первому варианту осуществления.
[0042] [Действие процесса рекуперативного управления скоростью]
Действие процесса рекуперативного управления скоростью будет описано ниже на основе блок-схемы последовательности операций на фиг. 2.
[0043] В то время как область рекуперативного торможения поддерживается, после начала процесса на основе запроса начала совместного рекуперативного управления, этапы, которые идут от этапа S1 → этап S2 → этап S3 → этап S5 → этап S6 → этап S7 в блок-схеме последовательности операций на фиг. 2, повторяются. На этапе S1 вычисляется целевая скорость вращения согласно оптимальной эффективности относительно рекуперативного крутящего момента. На этапе S2 вычисляется темп изменения командной скорости вращения Pri end, который обеспечивает реакцию на целевую скорость вращения. На этапе S5 выбирается темп изменения командной скорости вращения Pri end, вычисленный на этапе S2. На этапе S6 текущая командная скорость вращения Pri end вычисляется из предыдущей командной скорости вращения Pri end и темпа изменения командной скорости вращения, выбранного на этапе S5. Затем, командное значение переключения передачи, чтобы получать текущую командную скорость вращения Pri end, выводится из блока 84 управления CVT.
Следовательно, в то время как область рекуперативного торможения поддерживается, если целевая скорость вращения задается равной скорости вращения, которая слегка превышает нижнюю предельную скорость вращения, рекуперативное управление скоростью выполняется так, что скорость вращения Pri end бесступенчатой трансмиссии 6 ременного типа поддерживает целевую скорость вращения независимо от уменьшения скорости транспортного средства. Если целевая скорость вращения повышается вследствие операции нажатия тормоза или дополнительной операции нажатия тормоза, в то время как область рекуперативного торможения поддерживается, тогда рекуперативное управление скоростью посредством понижения передачи выполняется так, что целевая скорость вращения достигается при темпе изменения командной скорости вращения Pri end, который обеспечивает реакцию.
[0044] С другой стороны, когда выполняется вход в область переключения тормоза с рекуперативного торможения на гидравлическое торможение вследствие уменьшения скорости транспортного средства, этапы, которые идут от этапа S1 → этап S2 → этап S3 → этап S4 → этап S5 → этап S6 → этап S7 в блок-схеме последовательности операций на фиг. 2, повторяются. На этапе S4, когда дополнительная операция нажатия педали тормоза выполняется в области переключения тормоза, вычисляется темп изменения командной скорости вращения Pri end, который будет в пределах допустимого изменения G. На этапе S5 выбирается меньший из темпа изменения командной скорости вращения Pri end, вычисленного на этапе S2, и темпа изменения командной скорости вращения Pri end, вычисленного на этапе S4. На этапе S6 текущая командная скорость вращения Pri end вычисляется из предыдущей командной скорости вращения Pri end и темпа изменения командной скорости вращения, выбранного на этапе S5. Затем, командное значение переключения передачи, чтобы получать текущую командную скорость вращения Pri end, выводится из блока 84 управления CVT.
Следовательно, в области переключения тормоза с рекуперативного торможения на гидравлическое торможение, например, если выполняется дополнительная операция нажатия педали тормоза, тогда темп изменения командной скорости вращения Pri end ограничивается значением, которое меньше или равно темпу изменения, полученному вычитанием темпа изменения целевой скорости вращения с характеристикой целевой скорости вращения из допускающего толчок темпа изменения. Рекуперативное управление скоростью, таким образом, выполняется относительно характеристики целевой скорости вращения, которая постепенно уменьшается по направлению к нижней предельной скорости вращения после увеличения от нижней предельной скорости вращения, в то же время поддерживая темп изменения командной скорости вращения Pri end.
[0045] [Действие рекуперативного управления скоростью]
"Действие рекуперативного управления скоростью в сравнительном примере (фиг. 6)" и "действие рекуперативного управления скоростью в первом варианте осуществления (фиг. 7)" будут описаны отдельно, относительно действия рекуперативного управления скоростью.
[0046] (Действие рекуперативного управления скоростью в сравнительном примере: фиг. 6)
В сравнительном примере, независимо от того, находится или нет в области переключения тормоза, если выполняется дополнительная операция нажатия педали тормоза, рекуперативное управление скоростью выполняется посредством понижения передачи так, чтобы достигать целевой скорости вращения с крутым уклоном посредством темпа изменения командной скорости вращения Pri end, который обеспечивает реакцию. Затем, после того как целевая скорость вращения достигается, повышение передачи выполняется так, чтобы уменьшаться до нижней предельной скорости вращения при темпе изменения командной скорости вращения Pri end, который следует характеристике уменьшения целевой скорости вращения.
На фиг. 6 время t1 является временем начала переключения торможения. Время t2 является временем начала понижения передачи посредством дополнительной операции нажатия педали тормоза. Время t3 является временем окончания переключения тормоза. Время t4 является временем остановки транспортного средства.
[0047] В случае сравнительного примера, если переключение торможения начинается во время t1, и водитель выполняет дополнительную операцию нажатия педали тормоза с намерением остановить транспортное средство во время t2, начинается понижение передачи, сопровождающее изменение в целевой скорости вращения. Когда понижение передачи начинается во время t2, понижение передачи выполняется посредством темпа изменения командной скорости вращения Pri end, который быстро увеличивает командную скорость вращения Pri end по направлению к целевой скорости вращения, как проиллюстрировано характеристикой сплошной линией на фиг. 6. Затем, когда целевая скорость вращения достигается непосредственно после времени t2, выполняется повышение передачи, таким образом, командная скорость вращения Pri end быстро уменьшается вдоль дугообразной характеристики целевой скорости вращения, чтобы достигать нижней предельной скорости вращения. Кроме того, если рекуперативное управление скоростью устанавливается в управление трансмиссией с обратной связью (например, PI-управление), последующая реакция фактической скорости вращения Pri end относительно командной скорости вращения Pri end задерживается.
[0048] Следовательно, исследование характеристики фактической скорости вращения Pri end показывает, что фактическая скорость вращения Pri end быстро увеличивается после задержки от времени t2 дополнительного нажатия педали тормоза, как проиллюстрировано характеристикой в виде прерывистой линии на фиг. 6. Затем, после быстрого увеличения, фактическая скорость вращения Pri end поворачивает обратно и быстро уменьшается, вызывая перерегулирование, в котором фактическая скорость вращения Pri end превышает целевую скорость вращения (характеристика в рамке, указанной стрелкой A на фиг. 6).
[0049] С этим быстрым изменением в фактической скорости вращения Pri end инерционный толчок вследствие замедления G возникает поблизости от разворота повышения и падения фактической скорости вращения Pri end (характеристика в рамке, указанной стрелкой B на фиг. 6), обеспечивая дискомфорт водителю, который поддерживает постоянную операцию тормоза после дополнительной операции нажатия педали тормоза.
[0050] (Действие рекуперативного управления скоростью в первом варианте осуществления: фиг. 7)
В отличие от сравнительного примера, описанного выше, в первом варианте осуществления, если дополнительная операция нажатия педали тормоза выполняется в области переключения тормоза, выполняется рекуперативное управление скоростью, в котором темп изменения командной скорости вращения Pri end ограничивается значением, которое меньше или равно темпу изменения, полученному вычитанием темпа изменения целевой скорости вращения из допускающего толчок темпа изменения.
На фиг. 7 время t1 является временем начала переключения торможения. Время t2 является временем начала понижения передачи дополнительной операции нажатия педали тормоза. Время t3 является временем окончания переключения тормоза. Время t4 является временем остановки транспортного средства.
[0051] В случае первого варианта осуществления, если переключение торможения начинается во время t1, и водитель выполняет дополнительную операцию нажатия педали тормоза с намерением остановить транспортное средство во время t2, начинается понижение передачи, сопровождающее изменение в целевой скорости вращения. Когда понижение передачи начинается во время t2, командная скорость вращения Pri end повышается по направлению к целевой скорости вращения непосредственно после начала, после чего командная скорость вращения Pri end изменяется так, чтобы поддерживать угол открытия, сформированный с характеристикой целевой скорости вращения, как проиллюстрировано характеристикой сплошной линией на фиг. 7. Таким образом, переключение рекуперации выполняется так, что командная скорость вращения Pri end чертит плавную дугообразную кривую и достигает нижней предельной скорости вращения во время t3. Следовательно, в то время как последующая реакция фактической скорости вращения Pri end относительно командной скорости вращения Pri end задерживается вследствие управления трансмиссией с обратной связью, исследование характеристики фактической скорости вращения Pri end показывает, что перерегулирование, в котором фактическая скорость вращения Pri end следует дугообразной кривой без разворота, и фактическая скорость вращения Pri end превышает целевую скорость вращения, как проиллюстрировано характеристикой прерывистой линией на фиг. 7, пресекается (характеристика в рамке, указанной стрелкой C на фиг. 7).
[0052] Смягчая изменение этой фактической скорости вращения Pri end, представляется возможным пресекать инерционный толчок, вызванный замедлением G поблизости от момента, когда фактическая скорость вращения Pri end переключается с увеличения на уменьшение (характеристика в рамке, указанной стрелкой D на фиг. 7). В результате, представляется возможным предотвращать возникновение дискомфорта у водителя, который поддерживает постоянную операцию тормоза после дополнительной операции нажатия педали тормоза.
[0053] [Характерное действие рекуперативного управления скоростью]
Первый вариант осуществления выполнен с возможностью накладывать ограничение на темп изменения командной скорости вращения Pri end для командной скорости вращения Pri end при выполнении рекуперативного управления скоростью на основе дополнительной операции нажатия педали тормоза в области переключения тормоза для переключения с рекуперативного торможения на механическое торможение вследствие уменьшения скорости транспортного средства.
Т.е., в рекуперативном управлении скоростью на основе дополнительной операции нажатия педали тормоза, выполняется понижение передачи, в котором командная скорость вращения Pri end увеличивается по направлению к целевой скорости вращения. Однако, после того как командная скорость вращения Pri end достигает целевой скорости вращения, которая имеет характеристику уменьшения со временем в области переключения тормоза, необходимо понижать скорость вращения на входе трансмиссии после достижения целевой скорости вращения. При выполнении рекуперативного управления скоростью на основе дополнительной операции нажатия педали тормоза в такой области переключения тормоза темп изменения командной скорости вращения Pri end для командной скорости вращения Pri end изменяется спокойно посредством наложения ограничения на темп изменения командной скорости вращения Pri end для командной скорости вращения Pri end. Таким образом, даже если существует задержка последующей реакции вследствие управления трансмиссией с обратной связью, представляется возможным пресекать перерегулирование, в котором фактическая скорость вращения трансмиссии Pri end превышает целевую скорость вращения, и возникновение инерционного толчка поблизости от момента, когда фактическая скорость вращения Pri end переключается с повышения на понижение, также пресекается.
В результате, представляется возможным предотвращать возникновение дискомфорта у водителя, который поддерживает постоянную операцию торможения после дополнительного нажатия, при выполнении рекуперативного управления скоростью на основе дополнительной операции нажатия педали тормоза в области переключения тормоза вследствие уменьшения скорости транспортного средства во время замедления.
[0054] Первый вариант осуществления выполнен с возможностью накладывать ограничение на темп изменения командной скорости вращения Pri end для командной скорости вращения Pri end, чтобы быть меньше или равным допускающему толчок темпу изменения, который предоставляет возможность инерционного толчка вследствие колебания замедления G транспортного средства, сопровождающего изменение в скорости вращения вследствие роста и падения.
Т.е., если ограничивается, темп изменения командной скорости вращения Pri end становится меньше или равным допускающему толчок темпу изменения, который допускает возможность инерционного толчка вследствие колебания замедления G транспортного средства.
Следовательно, представляется возможным надежно предотвращать возникновение дискомфорта у водителя, который поддерживает постоянную операцию торможения после дополнительной операции нажатия педали тормоза в области переключения тормоза.
[0055] Первый вариант осуществления выполнен с возможностью ограничивать темп изменения командной скорости вращения Pri end, при выполнении рекуперативного управления скоростью в области переключения тормоза, значением, которое меньше или равно темпу изменения, полученному вычитанием темпа изменения целевой скорости вращения с характеристикой целевой скорости вращения, заданной на основе рекуперативной эффективности, из допускающего толчок темпа изменения.
Т.е., темп изменения командной скорости вращения Pri end для момента, когда рекуперативное управление скоростью выполняется в области переключения тормоза, может быть вычислен с помощью характеристики целевой скорости вращения, которая задается на основе рекуперативной эффективности в области переключения тормоза.
Следовательно, процесс ограничения темпа изменения командной скорости вращения Pri end облегчается, в то же время добиваясь ограничения, меньшего или равного допускающему толчок темпу изменения, который допускает возможность инерционного толчка вследствие колебания замедления G транспортного средства.
[0056] Далее описываются эффекты.
Эффекты, перечисленные ниже, могут быть получены с помощью устройства рекуперативного управления скоростью для FF-гибридного транспортного средства согласно первому варианту осуществления.
[0057] (1) В транспортном средстве (FF-гибридном транспортном средстве), снабженном бесступенчатой трансмиссией (бесступенчатой трансмиссией 6 ременного типа) и электромотором (мотор-генератором 4), который соединяется со стороной входного вала бесступенчатой трансмиссии (бесступенчатой трансмиссии 6 ременного типа) и который регенерирует энергию во время замедления, предусматривается контроллер (модуль 81 гибридного управления), который, когда существует запрос для увеличения величины рекуперации во время замедления, выполняет рекуперативное управление скоростью для понижения передачи бесступенчатой трансмиссии (бесступенчатой трансмиссии 6 ременного типа) в сторону низкого передаточного отношения, и увеличивает скорость вращения входного вала трансмиссии, с которым соединяется электромотор (мотор-генератор 4), и контроллер (модуль 81 гибридного управления) накладывает ограничение на темп изменения скорости вращения (темп изменения командной скорости вращения Pri end) для скорости вращения на входе трансмиссии (командной скорости вращения Pri end) при выполнении рекуперативного управления скоростью для увеличения скорости вращения на входе трансмиссии на основе запроса для увеличения величины рекуперации в области переключения тормоза, в которой рекуперативное торможение переключается на механическое торможение (гидравлическое торможение), вследствие уменьшения скорости транспортного средства.
Следовательно, представляется возможным предотвращать возникновение дискомфорта у водителя, который поддерживает постоянную операцию запроса после запроса увеличения, при выполнении рекуперативного управления скоростью на основе запроса для увеличения величины рекуперации в области переключения тормоза с рекуперативного на механический (гидравлический) вследствие уменьшения скорости транспортного средства во время замедления.
[0058] (2) Предусматривается масляный насос (главный масляный насос 14), который соединяется со стороной входного вала бесступенчатой трансмиссии (бесступенчатой трансмиссии 6 ременного типа), в которой скорость вращения для создания необходимого гидравлического давления для бесступенчатой трансмиссии (бесступенчатой трансмиссии 6 ременного типа) во время замедления задается в качестве нижней предельной скорости вращения, и когда операция нажатия тормоза или дополнительная операция нажатия педали тормоза выполняется в области переключения тормоза вследствие уменьшения скорости транспортного средства, контроллер (модуль 81 гибридного управления) задает характеристику целевой скорости вращения рекуперативного торможения, которая уменьшается по направлению к нижней предельной скорости вращения, после того как скорость вращения увеличивается на основе рекуперативной эффективности, и накладывает ограничение на командное значение скорости вращения на входе трансмиссии (командную скорость вращения Pri end) посредством рекуперативного управления скоростью для приближения характеристики целевой скорости вращения.
Таким образом, в дополнение к эффектам пункта (1), представляется возможным предотвращать возникновение дискомфорта у водителя, который поддерживает постоянную операцию торможения после нажатия или дополнительного нажатия, при выполнении рекуперативного управления скоростью на основе операции нажатия тормоза или дополнительной операции нажатия педали тормоза в области переключения тормоза вследствие уменьшения скорости транспортного средства.
[0059] (3) Контроллер (модуль 81 гибридного управления) накладывает ограничение на темп изменения скорости вращения (темп изменения командной скорости вращения Pri end) для скорости вращения на входе трансмиссии (командной скорости вращения Pri end), чтобы быть меньше или равным допускающему толчок темпу изменения, который допускает возможность инерционного толчка вследствие колебания замедления G транспортного средства, сопровождающего изменение в скорости вращения вследствие роста и падения.
Таким образом, в дополнение к эффектам пункта (2), представляется возможным надежно предотвращать возникновение дискомфорта у водителя, который поддерживает постоянную операцию торможения после операции нажатия тормоза или дополнительной операции нажатия педали тормоза в области переключения тормоза.
[0060] (4) Контроллер (модуль 81 гибридного управления) накладывает ограничение на темп изменения командной скорости вращения (темп изменения командной скорости вращения Pri end) при выполнении рекуперативного управления скоростью в области переключения тормоза до значения, которое меньше или равно темпу изменения, полученному вычитанием темпа изменения целевой скорости вращения с характеристикой целевой скорости вращения, заданной на основе рекуперативной эффективности, из допускающего толчок темпа изменения.
Таким образом, в дополнение к эффектам пункта (3), представляется возможным обеспечивать процесс, чтобы ограничивать темп изменения командной скорости вращения (темп изменения командной скорости вращения Pri end), в то же время добиваясь, чтобы ограничение было меньше или равно допускающему толчок темпу изменения, который допускает возможность инерционного толчка вследствие колебания замедления G транспортного средства.
[0061] Устройство рекуперативного управления скоростью транспортного средства настоящего изобретения было описано выше на основе первого варианта осуществления, но конкретные его конфигурации не ограничиваются первым вариантом осуществления, и различные модификации и дополнения в конструкции могут быть выполнены без отступления от рамок изобретения согласно каждому пункту формулы изобретения.
[0062] В первом варианте осуществления был показан пример, в котором темп изменения командной скорости вращения Pri end ограничивается, при выполнении рекуперативного управления скоростью в области переключения тормоза, значением, которое меньше или равно темпу изменения, полученному вычитанием темпа изменения целевой скорости вращения с характеристикой целевой скорости вращения на основе уменьшения рекуперативного крутящего момента, из допускающего толчок темпа изменения. Однако, способ ограничения темпа изменения командной скорости вращения Pri end при выполнении рекуперативного управления скоростью в области переключения тормоза не ограничивается этим способом и может быть выполнен посредством процесса фильтрации, или т.п., который сдерживает темп изменения командной скорости вращения Pri end.
[0063] В первом варианте осуществления был предоставлен пример, в котором рекуперативное управление скоростью выполняется на основе дополнительной операции нажатия педали тормоза в области переключения тормоза вследствие уменьшения скорости транспортного средства. Однако, изобретение, конечно, также применимо при выполнении рекуперативного управления скоростью на основе операции нажатия тормоза в области переключения тормоза вследствие уменьшения скорости транспортного средства.
[0064] В первом варианте осуществления был показан пример, в котором бесступенчатая трансмиссия 6 ременного типа, в которой ремень 6c наматывается вокруг первичного шкива 6a и вторичного шкива 6b, и давление Ppri первичного шкива и давление Psec вторичного шкива являются гидравлическим давлением для переключения передач, используется в качестве бесступенчатой трансмиссии. Однако, бесступенчатая трансмиссия может быть примером, который использует также бесступенчатую трансмиссию тороидального типа.
[0065] В первом варианте осуществления был показан пример, в котором устройство рекуперативного управления скоростью настоящего изобретения применяется к FF-гибридному транспортному средству согласно системе привода с одним мотором и двумя муфтами сцепления. Однако, устройство рекуперативного управления скоростью настоящего изобретения может быть применено к FR-гибридному транспортному средству, или гибридному транспортному средству, отличному от типа приведения в движение с одним мотором, двумя муфтами сцепления, такому как система прямого соединения двигателя и мотора, или механизм распределения мощности. Кроме того, настоящее изобретение может также быть применено к оснащенному двигателем транспортному средству или электрическому транспортному средству (включающему в себя транспортные средства на топливных элементах), пока транспортное средство оснащается электромотором и бесступенчатой трансмиссией и выполняет совместное рекуперативное управление.
Реферат
Настоящее изобретение оснащается мотор-генератором (4) и бесступенчатой трансмиссией (6) ременного типа. Это FF-гибридное транспортное средство снабжается модулем (81) гибридного управления, который, когда существует запрос для увеличения величины рекуперации во время замедления, выполняет рекуперативное управление скоростью для понижения передачи бесступенчатой трансмиссии (6) ременного типа в сторону низкого передаточного отношения и увеличивает скорость вращения входного вала трансмиссии, с которым соединяется мотор-генератор (4). Модуль (81) гибридного управления также накладывает ограничение, чтобы оставаться в пределах темпа изменения командной скорости вращения Pri end для командной скорости вращения Pri end при выполнении рекуперативного управления скоростью для увеличения командной скорости вращения Pri end на основе операции торможения в области переключения тормоза для переключения с рекуперативного торможения на гидравлическое торможение вследствие уменьшения скорости транспортного средства. Достигается предотвращение возникновения дискомфорта у водителя, который поддерживает постоянную операцию запроса после запроса увеличения, при выполнении рекуперативного управления скоростью на основе запроса для увеличения величины рекуперации в области переключения тормоза вследствие уменьшения скорости транспортного средства во время замедления. 3 з.п. ф-лы, 7 ил.
Комментарии