Электрическая силовая передача для рабочей машины - RU2394701C2
Код документа: RU2394701C2
Чертежи




Описание
Изобретение относится к электрической силовой передаче, а более конкретно к электрической силовой передаче для рабочей машины.
Уровень техники
Обычные рабочие машины, такие как, например, ковшовые фронтальные погрузчики, бульдозеры и экскаваторы, в общем могут получать энергию от двигателя внутреннего сгорания, такого как, например, дизельный двигатель, бензиновый двигатель или другой двигатель внутреннего сгорания, известный в данной области техники. Такие двигатели внутреннего сгорания могут выбрасывать нежелательные выхлопные газы и другие загрязняющие вещества во время работы. В последние годы и в обозримом будущем уменьшение уровня выхлопов двигателей внутреннего сгорания вообще и рабочих машин в частности представляет собой законодательно установленный приоритет. Кроме того, повышение эффективности топлива в транспортных средствах и рабочих машинах также приобретает все большее значение, например, для снижения затрат, связанных с повышением стоимости ископаемого топлива и/или зависимости от импортируемой нефти.
С целью, по меньшей мере частично, решения проблемы соответствия новым и будущими законодательным требованиям в отношении выделения продуктов сгорания и стремясь уменьшить потребление топлива осуществляется поиск альтернативных способов привода в действие машин. Одна из таких альтернатив может быть связана с использованием силовых передач, имеющих электрические компоненты, такие как, например, электродвигатели, генераторы и системы электронного управления. Такие электрические компоненты использовались ранее в некоторых вариантах применения силовых передач в транспортных средствах. Использование таких электрических компонентов, однако, в рабочих машинах вообще и в рабочих машинах, имеющих гусеницы, зацепляющиеся за грунт, в частности может представлять множество проблем, не проявляющихся в других типах транспортных средств.
Рабочие машины, имеющие гусеницы, зацепляющиеся за грунт, часто могут использоваться для выполнения функций, которые требуют наличия высокого выходного крутящего момента и относительно малой максимальной скорости перемещения по земле. Кроме того, рабочие машины, имеющие гусеницы, зацепляющиеся за грунт, часто используют в средах, в которых требуется дополнительное тяговое усилие, и/или их используют для выполнения функций, которые требуют большого тягового усилия на крюке, например тягового усилия на крюке обычно в диапазоне приблизительно от одного до полутора веса рабочей машины, для выполнения таких функций, как, например, сгребание и сбор земли. В таких вариантах применения обычно требуется большой выходной крутящий момент и относительно низкая скорость передвижения по земле, например меньше чем приблизительно 9 миль в час. Кроме того, для рабочих машин, имеющих гусеницы, зацепляющиеся за грунт, может быть желательно иметь бесступенчатую трансмиссию, которая предотвращает чрезмерную перегрузку двигателя, которая исключает переключение передач и уменьшает количество операций управления со стороны оператора, одновременно обеспечивая эффективную систему силовой передачи. В результате для рабочих машин в общем и для рабочих машин, имеющих гусеницы, зацепляющиеся за грунт, в частности может быть желательно иметь силовую передачу, обладающую высокой эффективностью и плавным регулированием скорости, для выполнения таких функций.
Рабочие машины, имеющие гусеницы, зацепляющиеся за грунт, часто могут выполнять циклические операции. Циклические операции представляют собой операции, в которых использование рабочей машины может требовать многократного начала движения, остановки и изменения направления на обратное. Например, бульдозер может толкать землю в направлении вперед, останавливаться, менять направление на обратное, снова останавливаться и затем толкать землю снова в направлении вперед. Другой пример таких циклических операций возникает во время типичной работы гусеничного ковшового фронтального погрузчика, который может многократно перемещаться вперед при захвате груза - земли, перемещаться в обратном направлении, перемещая груз, поворачиваться, перемещаться в прямом направлении, перенося груз, поднимать груз и вываливать груз в самосвал и изменять направление на обратное для перемещения обратно от самосвала. Такие примерные циклы часто повторяются много раз в виде быстрой последовательности. В результате такого циклического применения кинетическая энергия, связанная с перемещением рабочей машины, должна поглощаться, когда рабочая машина останавливается. Кроме того, в результате высокого коэффициента передачи конечного приводного зубчатого колеса, что может быть связано, например, с потребностью обеспечения большого значения тягового усилия на крюке, большая величина инерции, связанная с движением рабочей машины, может в общем влиять обратно на силовую передачу рабочей машины при остановке. Поэтому в результате типичного выполнения циклических операций, которые могут быть ассоциированы с рабочими машинами, имеющими гусеницы, зацепляющиеся за грунт, может быть желательно обеспечить силовую передачу рабочей машины, которая позволяла бы передавать большие значения кинетической энергии и которая имела бы относительно малую инерцию для уменьшения влияния инерции во время выполнения циклических операций.
От рабочих машин, имеющих гусеницы, зацепляющиеся за землю, может требоваться, чтобы они работали в средах, обычно являющихся агрессивными для устройств с воздушным охлаждением, в таких средах, как, например, болотистые условия или очень пыльные условия. Такие условия могут привести к довольно неудовлетворительному использованию обычных систем охлаждения, которые основаны, например, на воздушных фильтрах, которые могут быстро засориться. Кроме того, охлаждаемые воздухом компоненты быстро заполняются землей или грязью, затрудняя таким образом достаточное охлаждение и приводя к преждевременному отказу детали. В результате обычные электрические компоненты с воздушным охлаждением могут быть не пригодными для использования в рабочих машинах, работающих в таких условиях.
Рабочие машины, имеющие гусеницы, зацепляющиеся за грунт, могут иметь ограниченное пространство для размещения компонентов силовой передачи. В результате может быть предпочтительно использовать компоненты силовой передачи, которые выполнены относительно компактными при их мощности и/или выходном крутящем моменте, которые они передают таким образом, чтобы они имели высокую плотность мощности. Множество обычных электродвигателей с воздушным охлаждением, однако, не обладают достаточной плотностью мощности для использования в рабочей машине. Поэтому было бы предпочтительно обеспечить для рабочей машины, имеющей гусеницы, зацепляющиеся за грунт, силовую передачу, обладающую высокой плотностью мощности.
Рабочие машины, имеющие зацепляющиеся за грунт гусеницы, обычно могут включать в себя один или больше рабочих инструментов, предназначенных для выполнения задач, связанных с конкретной рабочей машиной, которая может работать с помощью, например, одного или больше гидравлических цилиндров, активируемых гидравлической системой. Например, активация одного или больше гидравлических цилиндров может использоваться для подъема и опускания ножа бульдозера и/или для подъема и опускания ковша ковшового фронтального погрузчика или экскаватора. Такие гидравлические системы могут включать в себя один или больше насосов для подачи давления в гидравлическую систему. Такие насосы могут обычно приводиться в движение от двигателя внутреннего сгорания. В результате двигатель внутреннего сгорания может использоваться не только для привода в движение рабочей машины, но он также может использоваться для обеспечения энергией различных рабочих инструментов, активируемых гидравлическими цилиндрами. Следовательно, по мере того, как повышается потребность в гидравлическом насосе (насосах), например, когда повышается нагрузка на ковш экскаватора, двигатель внутреннего сгорания может быть приведен в действие таким образом, чтобы он вырабатывал больше мощности, что обычно достигается путем увеличения количества воздуха и топлива, подаваемых в двигатель, для повышения скорости вращения двигателя.
Однако иногда увеличение подачи воздуха и топлива не может быть обеспечено достаточно быстро в ответ на внезапное увеличение потребности в мощности для передачи этой мощности к гидравлическому насосу (насосам). В результате происходит перегрузка двигателя или его остановка. Кроме того, когда двигатель внутреннего сгорания выполнен с возможностью в достаточной степени реагировать на внезапное увеличение потребности гидравлического насоса путем увеличения скорости вращения двигателя, в результате обычно образуется больше выхлопных газов и снижается эффективность потребления топлива. Поэтому может быть желательно создать систему, которая могла бы обеспечить достаточную мощность в качестве движущей силы и обеспечить работу инструментов рабочей машины без перегрузки или остановки двигателя внутреннего сгорания и которая могла бы не приводить к каким-либо существенным дополнительным выбросам продуктов сгорания или снижению эффективности топлива.
Одно гусеничное транспортное средство, имеющее двигатели внутреннего сгорания, комбинированные с электродвигателями для привода в движение, описано в патенте США №6,691,806 (патент '806), выданном авторам Wolfgang и др. 17 февраля 2004 г. В патенте '806 описан модуль привода, предназначенный для гусеничного транспортного средства, имеющего первый и второй электрические генераторы и первый и второй двигатели внутреннего сгорания, приводящие в движение генераторы, для обеспечения питания двух пар из первого и второго электродвигателей, причем каждая пара электродвигателей предназначена для привода в движение гусеницы, расположенной с одной стороны транспортного средства. Эти компоненты соединены проводами таким образом, что, если транспортное средство, в частности военное транспортное средство, будет частично повреждено, такое транспортное средство может продолжить движение.
Хотя гусеничное транспортное средство в соответствии с патентом '806 включает в себя комбинацию из двигателей внутреннего сгорания, генераторов и электродвигателей для привода в движение, транспортное средство в соответствии с патентом '806, не представляет собой рабочую машину и не позволяет решить проблемы, описанные здесь выше, которые могут быть связаны с рабочими машинами.
Раскрытая рабочая машина может быть направлена на преодоление одной или больше проблем, описанных выше.
Сущность изобретения
В одном аспекте настоящее раскрытие включает в себя электрическую силовую передачу, включающую в себя двигатель, выполненный с возможностью выработки механической энергии, и генератор, функционально соединенный с двигателем и выполненный с возможностью преобразования, по меньшей мере, части механической энергии в электрическую энергию. Электрическая силовая передача дополнительно включает себя, по меньшей мере, один электродвигатель, функционально соединенный с генератором, множество элементов привода и, по меньшей мере, один силовой электронный модуль, выполненный с возможностью управления двигателем и/или генератором. По меньшей мере, один электродвигатель выполнен с возможностью передачи крутящего момента во множество элементов привода.
В дополнительном аспекте настоящее раскрытие включает в себя рабочую машину, которая включает в себя двигатель, выполненный с возможностью обеспечения для рабочей машины механической энергии, и генератор, функционально соединенный с двигателем и выполненный с возможностью преобразования, по меньшей мере, части механической энергии в электрическую энергию. Рабочая машина дополнительно включает в себя, по меньшей мере, один электродвигатель, функционально соединенный с генератором, причем, по меньшей мере, один электродвигатель имеет высокую плотность мощности. Рабочая машина также включает в себя элементы привода, расположенные с обеих сторон рабочей машины, и модуль дифференциального управления, функционально соединенный, по меньшей мере, с одним электродвигателем и элементами привода. Модуль дифференциального управления выполнен с возможность избирательного управления величиной крутящего момента, передаваемого в каждый из элементов привода. Рабочая машина дополнительно включает в себя элементы, зацепляющиеся за грунт, выполненные с возможностью приводить в движение рабочую машину. Элементы, зацепляющиеся за грунт, функционально соединены с элементами привода, и, по меньшей мере, один электродвигатель выполнен с возможностью обеспечения крутящего момента для элементов привода таким образом, что элементы, зацепляющиеся за грунт, приводят рабочую машину в движение.
В еще одном дополнительном аспекте настоящее раскрытие включает в себя рабочую машину, которая включает в себя, по меньшей мере, один рабочий инструмент, двигатель, выполненный с возможностью обеспечения рабочей машины механической энергией, и генератор, функционально соединенный с двигателем и выполненный с возможностью преобразования, по меньшей мере части, механической энергии в электрическую энергию. Рабочая машина дополнительно включает в себя, по меньшей мере, два электродвигателя, функционально соединенные с генератором, и, по меньшей мере, два элемента привода, расположенные с обеих сторон рабочей машины. Рабочая машина дополнительно включает в себя элементы, зацепляющиеся за грунт, выполненные с возможностью приводить в движение рабочую машину, причем элементы, зацепляющиеся за грунт, функционально соединены с элементами привода. По меньшей мере, два электродвигателя функционально соединены, по меньшей мере, с двумя элементами привода таким образом, что крутящий момент передают к одному из, по меньшей мере, двух элементов, зацепляющихся за грунт, с помощью одного из, по меньшей мере, двух электродвигателей, и крутящий момент подают к другому одному из, по меньшей мере, двух элементов, зацепляющихся за грунт, с помощью другого, по меньшей мере, одного из двух электродвигателей.
В еще одном дополнительном аспекте настоящее раскрытие включает в себя рабочую машину, которая включает в себя, по меньшей мере, один рабочий инструмент, двигатель, выполненный с возможностью обеспечения рабочей машины механической энергией, и генератор, функционально соединенный с двигателем и выполненный с возможностью преобразования, по меньшей мере части, механической энергии в электрическую энергию. Рабочая машина дополнительно включает в себя, по меньшей мере, один электродвигатель, функционально соединенный с генератором, причем, по меньшей мере, один электродвигатель включает в себя герметичный бесщеточный электродвигатель с жидкостным охлаждением. Рабочая машина также включает в себя элементы привода гусениц, расположенные с обеих сторон рабочей машины, и элементы, зацепляющиеся за грунт, выполненные с возможностью приводить в движение рабочую машину. Элементы, зацепляющиеся за грунт, функционально соединены с элементами привода, и, по меньшей мере, один электродвигатель выполнен с возможностью обеспечивать крутящий момент для элементов привода таким образом, что элементы, зацепляющиеся за грунт, приводят в движение рабочую машину.
В еще одном дополнительном аспекте настоящее раскрытие включает в себя способ работы рабочей машины, включающей в себя множество элементов, зацепляющихся за грунт, и, по меньшей мере, один рабочий инструмент. Способ включает в себя обеспечение работы двигателя, выполненного с возможностью обеспечения рабочей машины механической энергией и преобразования, по меньшей мере части, механической энергии в электрическую энергию с помощью генератора, функционально соединенного с двигателем. Способ дополнительно включает в себя привод в движение рабочей машины путем привода элементов, зацепляющихся за грунт, посредством крутящего момента, передаваемого, по меньшей мере, одним электродвигателем, функционально соединенным с генератором, и управление двигателем и/или генератором путем функционального соединения, по меньшей мере, одного силового электронного модуля с двигателем и генератором и управления двигателем и/или генератором с помощью, по меньшей мере, одного силового электронного модуля.
Краткое описание чертежей
На фиг.1 схематично показан вид сбоку примерной рабочей машины;
на фиг.2 схематично показана блок-схема рабочей машины, имеющей электрический силовой привод в соответствии с примерным раскрытым вариантом воплощения;
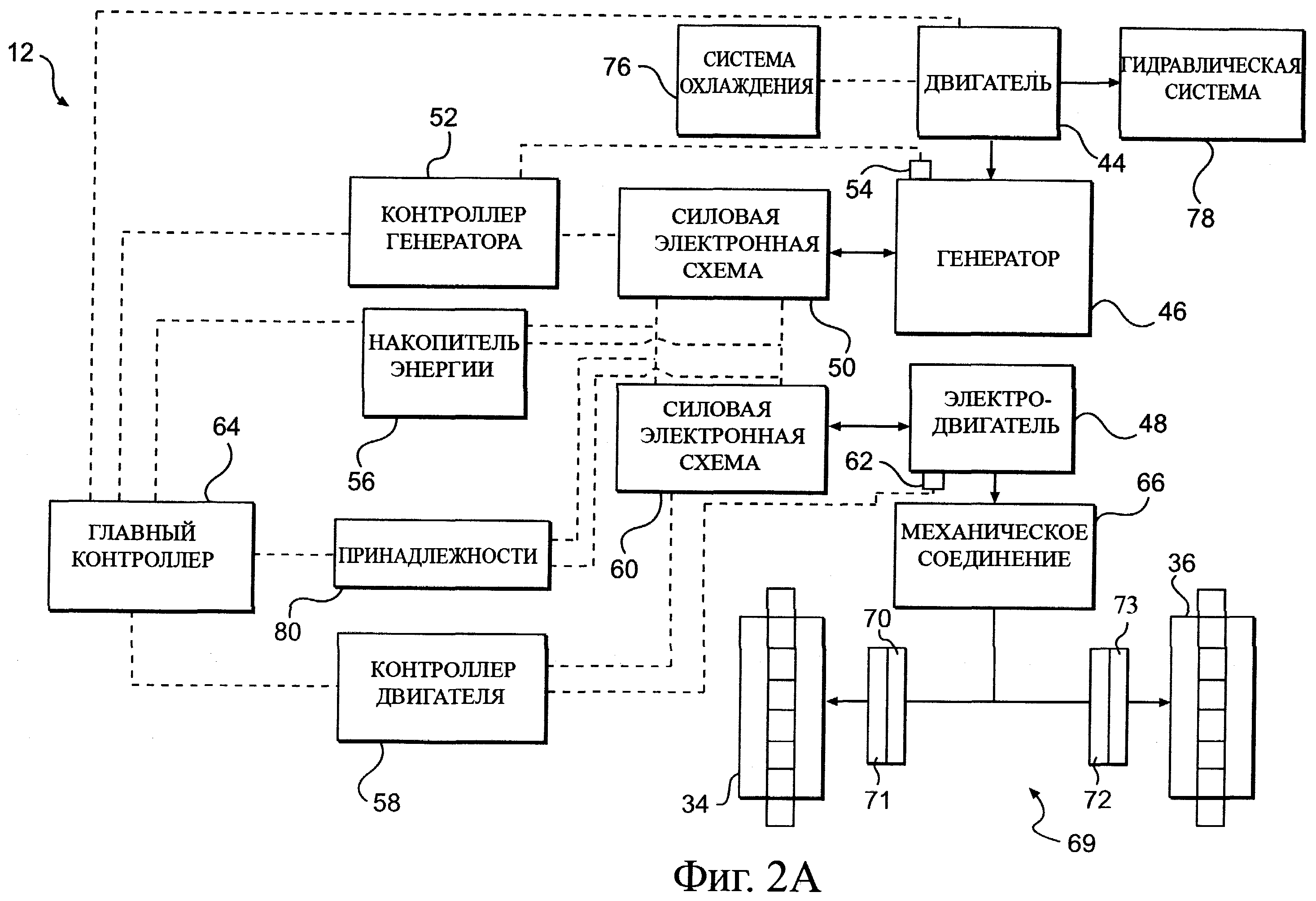
на фиг.2А показана блок-схема рабочей машины, имеющей электрический силовой привод в соответствии с примерным раскрытым вариантом воплощения;
на фиг.3 показана блок-схема рабочей машины, имеющей электрический силовой привод в соответствии с примерным раскрытым вариантом воплощения;
на фиг.4 показана блок-схема рабочей машины, имеющей электрический силовой привод в соответствии с примерным раскрытым вариантом воплощения; и
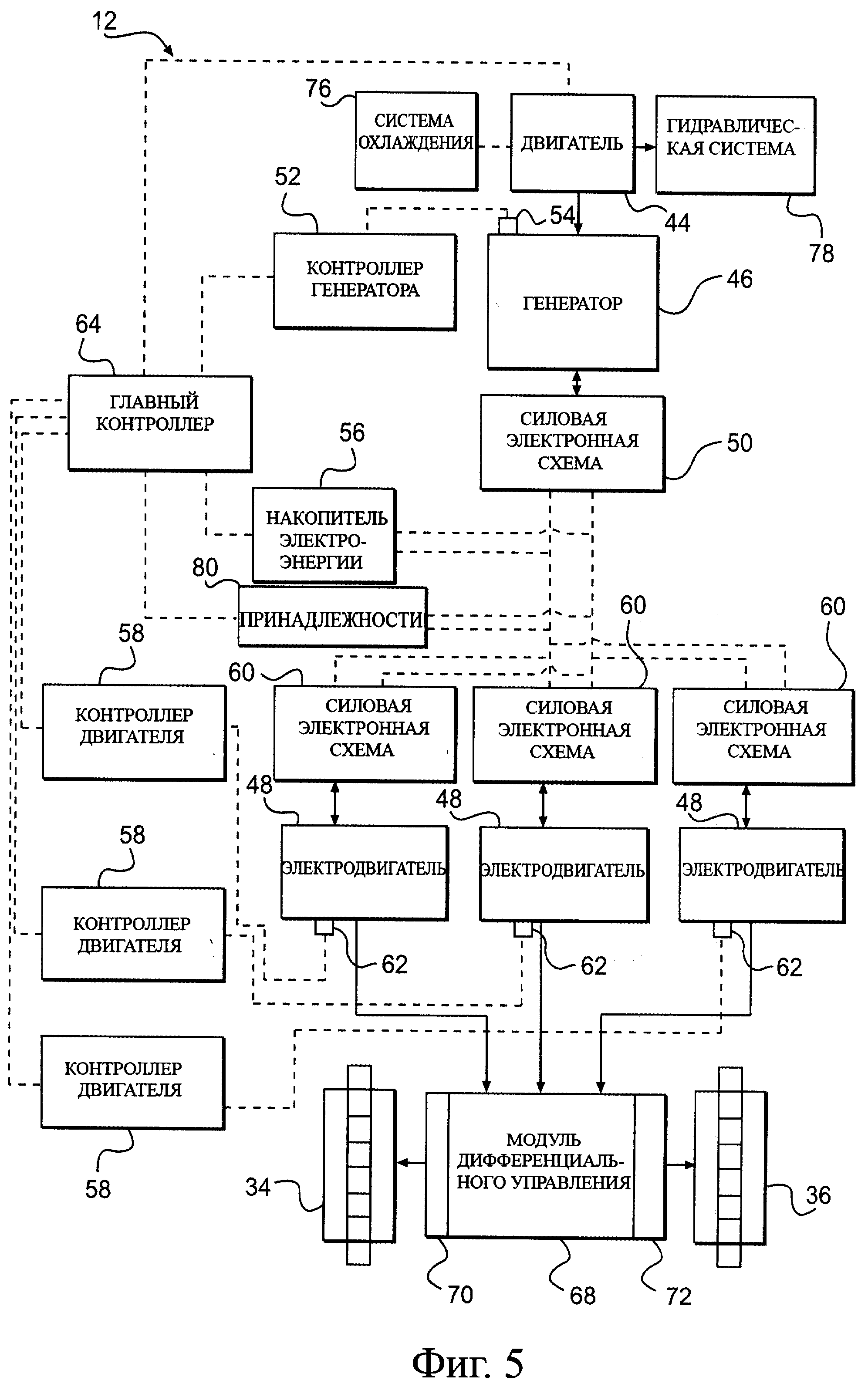
на фиг.5 показана блок-схема рабочей машины, имеющей электрический силовой привод в соответствии с примерным раскрытым вариантом воплощения.
Подробное описание изобретения
На фиг.1 иллюстрируется примерная рабочая машина 10, которая может включать в себя электрический силовой привод 12 (см., например, фиг.2-5). Хотя рабочая машина 10, представленная на фиг.1, представляет собой гусеничный трактор, рабочая машина 10 может представлять собой гусеничный погрузчик, гидравлический экскаватор, погрузочную машину с задней разгрузкой ковша, сельскохозяйственный трактор, колесный погрузчик или другую рабочую машину, известную специалистам в данной области техники. Рабочая машина 10 может включать в себя основную раму 14, предназначенную для установки на ней источника 16 энергии. Источник 16 энергии может быть выполнен с возможностью обеспечения энергией разных систем рабочей машины 10. Рабочая машина 10 также может включать в себя рабочее место 18 и может дополнительно включать в себя ходовую часть 20, на которой установлены элементы 22, зацепляющиеся за грунт (например, две гусеницы, зацепляющиеся за грунт), расположенные с противоположных сторон основной рамы 14, которые выполнены с возможностью зацепления за грунт и привода рабочей машины 10 в движение.
Ходовая часть 20 может быть выполнена с возможностью установки на ней двух толкающих брусов 24, расположенных с противоположных сторон на основной раме 14. Толкающие брусы 24 могут быть соединены на одном конце с рабочим инструментом 26, таким как, например, лопата бульдозера, выполненная с возможностью толкания и/или вытягивания, например, земли. Другой конец каждого из толкающих брусов 24 может быть соединен с рамой 28 катков, расположенной с противоположных сторон основной рамы 14. В альтернативном варианте воплощения рабочий инструмент 26 или нож соединен с основной рамой 14 с использованием силовой компоновки изменения угла наклона или PAT (СУН не показана). Рабочая машина 10 может дополнительно включать в себя один или больше подъемных цилиндров 30, установленных на противоположных сторонах рабочей машины 10, которые могут быть соединены с ходовой частью 20, по меньшей мере, на одном конце и с рабочим инструментом 26 на другом конце. Каждый из подъемных цилиндров 30 может включать в себя гидравлический силовой привод, выполненный с возможностью выдвижения и втягивания в ответ на команды оператора таким образом, что рабочий инструмент 26 можно поднимать и опускать относительно земли путем поворота толкающих брусов 24 относительно ходовой части 20.
Рабочая машина 10 может дополнительно включать в себя один или больше цилиндров 32 наклона, расположенных в непосредственной близости к передней части рабочей машины 10, которые могут быть соединены с рабочим инструментом 26 и толкающим брусом 24. Один или больше цилиндров 32 наклона могут быть выполнены с возможностью выдвижения и втягивания в соответствии с командами оператора таким образом, что рабочий инструмент 26 можно наклонять влево или вправо или наклонять вперед или назад относительно рабочей машины 10.
Ходовая часть 20 может включать в себя один или больше элементов 34 и 36 привода (см., например, фиг. 2-5), например элементы привода гусениц, каждая из которых расположена на противоположных сторонах рабочей машины 10. Например, элементы 34 и 36 привода представляют собой конечные приводы с зубчатой передачей, выполненной с возможностью передачи крутящего момента от электрической силовой передачи 12 к каждой из зацепляющихся за грунт гусениц 22. Ходовая часть 20 может также включать в себя одно или больше натяжных колес 38, один или больше промежуточных катков 40 и один или больше поддерживающих катков 42, соединенных с каждой из зацепляющихся за грунт гусениц 22, которые могут быть выполнены так, что они будут направлять зацепляющиеся за грунт гусеницы 22 и распределять вес рабочей машины 10 по зацепляющейся за грунт гусенице 22 рядом с землей.
На фиг.2-5 иллюстрируется несколько примерных вариантов воплощения электрической силовой передачи 12, выполненной с возможностью обеспечения энергией рабочей машины 10. Как показано на фиг.2, электрическая силовая передача 12 включает в себя двигатель 44, например дизельный двигатель, бензиновый двигатель, двигатель на природном газе, газотурбинный двигатель или любой другой двигатель, известный в данной области техники. Двигатель 44 может быть функционально соединен с генератором 46 и может осуществлять привод генератора 46 таким образом, что механическая энергия двигателя 44 будет преобразована в электрическую энергию. Генератор 46 может представлять собой любой известный генератор переменного или постоянного тока, такой как генератор на постоянном магните, индукционный генератор, коммутируемый реактивный генератор или гибридная комбинация приведенных выше вариантов конструкции, и также может быть герметизированным, бесщеточным и/или с жидкостным охлаждением генератором, например, для получения более долговечной конструкции. Генератор 46 можно использовать для обеспечения электрической энергии для одного или больше электродвигателей 48. Электрическая силовая передача 12 может дополнительно включать в себя силовую электронную схему 50 и контроллер 52 генератора, функционально соединенные с датчиком 54 генератора, например, датчиком скорости. Силовая электронная схема 50 может включать в себя преобразователь энергии, контроллер преобразователя и/или программное средство генератора, выполненное с возможностью управления преобразованием, по меньшей мере части, механической энергии в электрическую энергию. В качестве альтернативы (не показано) генератор может включать в себя выпрямитель вместо силовой электронной схемы 50, и датчик скорости может не потребоваться в зависимости от используемой логики управления. Контроллер 52 генератора может быть выполнен с возможностью управления преобразованием переменного тока генератора 46 в постоянный ток высокого напряжения и может отслеживать работу генератора 46 с помощью датчика 54 генератора.
Электрический силовой привод 12 также может включать в себя систему 56 накопления электрической энергии, такую как, например, батарея и/или ультраконденсатор или маховик, предназначенную для сохранения любой избыточной электрической энергии, генерируемой генератором 46, и/или для предоставления любой дополнительной электроэнергии, которая может потребоваться при запуске рабочей машины 10 и/или во время работы рабочей машины 10. Например, когда рабочая машина 10 работает в условиях малой нагрузки, например она не перемещается по земле и не работает с каким-либо из своих инструментов (например, с рабочим инструментом 26), двигатель 44 может продолжать работать с заданной скоростью двигателя или в определенном диапазоне скоростей двигателя. Например, в таких условиях относительно низкой нагрузки может оказаться возможным обеспечить более эффективную работу рабочей машины 10, и генератор 46 может продолжить преобразовывать механическую энергию в электрическую энергию, которая может накапливаться в системе 56 накопления электроэнергии. В качестве альтернативы, в ситуации, в которой рабочая машина 10 перемещается по земле с заданной скоростью и оператор командует выполнить с помощью рабочего инструмента задачу, например, оператор командует поднять ковш, содержащий груз земли, в то время как рабочая машина продолжает движение, система 56 накопления электроэнергии может предоставлять дополнительную энергию, помимо электроэнергии, генерируемой генератором 46, и может предотвратить перегрузку двигателя или остановку двигателя и/или может предотвратить замедление рабочей машины 10.
Электрическая силовая передача 12 может дополнительно включать в себя контроллер 58 двигателя, силовую электронную схему 60, функционально соединенную с электродвигателем 48, и, по меньшей мере, один контроллер 58 двигателя и/или датчик 62 двигателя, например датчик скорости. Однако следует понимать, что датчик 62 скорости может не потребоваться в зависимости от используемой логики управления. Силовая электронная схема 60 может включать в себя преобразователь энергии, контроллер преобразователя и/или программное обеспечение двигателя и может быть выполнена с возможностью преобразования и управления электричеством, например, подаваемым в электродвигатель 48, обеспечивая таким образом управление скоростью и крутящим моментом для привода в движение рабочей машины 10. Силовая электронная схема 60 может быть установлена в отсеке, который может быть герметизирован и может иметь жидкостное охлаждение. Например, генератор 46 может быть функционально связан с электродвигателем 48 через силовую электронную схему 50, контроллер 52 генератора, контроллер 58 двигателя и/или силовую электронную схему 60.
Хотя здесь он назван в единственном числе, электрический двигатель 48 может представлять собой больше чем один электродвигатель, и схематичное представление на фиг.2 электродвигателя 48 может представлять больше чем один электродвигатель, например два или больше электродвигателей, механически соединенных через зубчатую передачу. Благодаря получению электроэнергии от генератора 46 и/или системы 56 накопления электроэнергии электродвигатель 48 создает крутящий момент для привода механического соединения 66, такого как, например, узел зубчатой передачи. Электродвигатель 48 может представлять собой любой известный двигатель переменного или постоянного тока, такой как двигатель с постоянным магнитом, индукционный двигатель, коммутируемый реактивный двигатель или гибридная комбинация упомянутых выше типов двигателя, и может также быть выполнен как герметизированный бесщеточный двигатель и/или двигатель с жидкостным охлаждением. Электрическая силовая передача 12 дополнительно может включать в себя главный контроллер 64, выполненный с возможностью управления двигателем 44, контроллером 52 генератора, системой 56 накопления электроэнергии, и/или контроллер 58 двигателя таким образом, что электрическая силовая передача 12 может работать в скоординированном и управляемом режиме.
Механическое соединение 66 функционально может быть связано с модулем 68 дифференциального управления, таким как, например, модуль дифференциального управления, раскрытый в патенте США №4,434,680, выданном авторам Riediger и др., или любой другой известный модуль управления, предназначенный для согласования скорости и крутящего момента электродвигателя 48 с требуемым приводящим в движение выходом элементов 34 и 36 привода. Модуль 68 дифференциального управления может быть выполнен с возможностью передачи крутящего момента от механического соединения 66 к одному или обоим элементам 34 и 36 привода гусениц для привода в движение гусениц 22, зацепляющихся за грунт. Модуль 68 дифференциального управления включает в себя одну или больше планетарных зубчатых передач (не показаны), которые позволяют регулировать величину крутящего момента, передаваемого от механического соединения 66 каждому из элементов 34 и 36 привода, в соответствии с командами оператора.
Модуль 68 дифференциального управления также может быть связан с устройствами 70 и 72 торможения, которые могут быть выполнены с возможностью избирательного приложения силы торможения, в результате чего происходит замедление одного или обоих элементов 34 и 36 привода. В качестве альтернативы или в дополнение, электродвигатель 48 может работать как генератор, а генератор 46 может работать как двигатель, например, во время торможения рабочей машины 10 и/или во время замедления электродвигателя 48 и/или генератора 46. Например, электродвигатель 48 может быть выполнен таким образом и может управляться так, чтобы рабочую машину 10 можно было замедлять, используя электродвигатель 48 в качестве генератора, в результате чего происходит преобразование кинетической энергии рабочей машины 10 в электрическую энергию, которая может накапливаться в системе 56 накопления электроэнергии. Кроме того, инерция и скорость электродвигателя 48 также могут быть преобразованы в электроэнергию во время замедления электродвигателя 48. Кроме того, генератор 46 может работать как двигатель, например, для подачи энергии обратно к двигателю 44 для увеличения скорости двигателя 44 в течение периодов, в которые в электрической силовой передаче 12 имеется избыток энергии. Это позволяет уменьшить потребление топлива и/или снизить уровень выхлопа двигателя 44. В качестве альтернативы такая избыточная энергия может рассеиваться через резистивную решетку (не показана).
Электрическая силовая передача 12 может дополнительно включать в себя двигатель 74 управления, функционально связанный с модулем 68 дифференциального управления. Двигатель 74 управления выполнен с возможностью избирательного регулирования величины крутящего момента, передаваемого в каждый из элементов 34 и 36 привода, таким образом, что рабочая машина 10 может быть приведена в движение в направлении прямо вперед, в направлении прямо назад и может поворачивать при движении либо в направлении вперед или назад благодаря избирательной регулировке величины крутящего момента, передаваемого в каждый из элементов 34 и 36 привода на основе команд оператора. Двигатель 74 управления может быть запитан от гидравлического давления текучей среды, от электричества и/или других источников энергии. Двигатель 74 управления избирательно регулирует крутящий момент, передаваемый к элементам 34 и 36 привода, путем избирательного обездвиживания или вращения в направлении вперед или вращения в направлении назад части (например, кольцевой шестерни) одной из планетарных передач модуля 68 дифференциального управления, смещая таким образом крутящий момент, прикладываемый к элементам 34 и 36 привода. В качестве альтернативы, изменение скорости двигателя 74 управления приводит к увеличению или уменьшению скорости элементов 34 и 36 привода соответственно в соответствии с изменением скорости и направления вращения двигателя 74 управления.
В соответствии с некоторыми вариантами воплощения силовая передача 12 может включать в себя альтернативное управление, например, как показано на фиг.2А. Вместо модуля 68 дифференциального управления механическое соединение 66 может быть функционально соединено непосредственно с системой 69 сцепления и тормоза. Система 69 сцепления и тормоза может включать в себя тормоза 70 и 72 и сцепления 71 и 73 для элементов 34 и 36 привода соответственно. Тормоза 70 и 72 и сцепления 71 и 73 могут работать от источника давления текучей среды (не показан) и/или электрического сигнала от главного контроллера 64 для управления рабочей машиной 10. Сцепления 71 и 73, в качестве альтернативы, могут соединяться и разъединяться для соответствующего подключения и отключения силы привода, прикладываемой к элементам 34 и 36 привода рабочей машины 10. Сцепления 71 и 73 могут работать с управляемым давлением или сигналом для включения элементов 34 и 36 привода. Более конкретно, сцепления 71 и/или 73 могут быть полностью соединены и могут передавать мощность элементам 34 и 36 привода при максимальном давлении или сигнале управления. При минимальном давлении или сигнале управления сцепления 71 и/или 73 могут быть полностью разъединены, при этом мощность не передается элементам 34 и 36 привода. В промежутки между этими предельными состояниями сцепления 71 и/или 73 могут быть выполнены с возможностью "проскальзывания" с определенным процентным соотношением, которое пропорционально давлению или сигналу управления, то есть, например, только часть мощности может быть передана элементам 34 и 36 привода. Точная модуляция давления управления может обеспечивать точный дифференциал скорости между элементами 34 и 36 привода.
В соответствии с некоторыми вариантами воплощения система 69 сцепления и тормоза может быть выполнена, например, таким образом, чтобы потеря гидравлического давления или электрической мощности обязательно приводила к полному разъединению сцеплений 71 и 73 для того, чтобы убрать мощность от элементов 34 и 36 привода в качестве условия обеспечения безопасности. Следует понимать, что сцепления 71 и 73, в качестве альтернативы, могут быть пружинными сцеплениями и сцеплениями со сбросом давления.
Аналогично система 69 сцепления и тормоза может дополнительно включать в себя тормоза 70 и 72, в качестве альтернативы, включаемые и высвобождаемые для соответствующего торможения и высвобождения элементов 34 и 36 привода рабочей машины 10. Как правило, тормоза 70 и 72 могут представлять собой гидравлические тормоза дискового типа, в которых подача давления отключает торможение, прикладываемое пружиной. Например, максимальное давление торможения может полностью отключать тормоза 70 и/или 72, в то время как минимальное давление позволяет полностью включать тормоза 70 и/или 72. В соответствии с этим промежуточное давление позволяет получить исходное торможение, которое обычно называется "касанием". Система 69 сцепления и тормоза может быть выполнена, например, таким образом, чтобы потеря гидравлического давления обязательно приводила к полному включению работающих от пружин тормозов 70 и 72 для остановки рабочей машины 10 с целью обеспечения безопасности.
Система 76 охлаждения также может быть предусмотрена для рабочей машины 10 и может быть выполнена с возможностью обеспечения адекватного охлаждения различных систем рабочей машины 10, включающих в себя, например, двигатель 44, генератор 46, электродвигатель 48, механическое соединение 66, модуль 68 дифференциального управления, двигатель 74 управления, силовую электронную схему 50 и/или 60, систему 56 накопления электроэнергии и/или гидравлическую систему 78, которые могут быть установлены на рабочей машине 10. Система 76 охлаждения может включать в себя водяную (и/или с использованием этиленгликоля и/или другого антифриза/охлаждающей жидкости) и/или масляную систему охлаждения, связанную с двигателем 44, которая может быть расширена для обеспечения охлаждения одной или больше упомянутых выше систем. В качестве альтернативы или в дополнение, гидравлическая система 78 может включать в себя охладители (не показаны) и может быть расширена для обеспечения охлаждения одной или больше упомянутых выше систем с использованием гидравлической текучей среды. Другие системы охлаждения, известные в данной области техники, могут использоваться для обеспечения охлаждения рабочей машины 10.
В некоторых вариантах воплощения рабочая машина 10 может включать в себя гидравлическую систему 78, предназначенную для привода в действие различных гидравлических компонентов рабочей машины 10, таких как, например, гидравлические исполнительные устройства, используемые для привода в действие рабочих инструментов, таких как примерный рабочий инструмент 26, показанный на фиг.1. Гидравлическая система 78 может включать в себя один или больше насосов, предназначенных для создания гидравлического давления текучей среды в гидравлической системе 78, для обеспечения работы гидравлических исполнительных устройств. Как упомянуто выше, гидравлическая система 78 может включать в себя систему охлаждения, такую как, например, система 76 охлаждения, предназначенная для охлаждения гидравлической жидкости, в которой может происходить повышение температуры, например, во время работы различных рабочих инструментов. Система 76 охлаждения для гидравлической системы может включать в себя охладители и может быть расширена до охлаждения других систем рабочей машины 10, таких как, например, двигатель 44, генератор 46, электродвигатель 48, механическое соединение 66, модуль 68 дифференциального управления, двигатель 74 управления, силовая электронная схема 50 и 60 и/или система 56 накопления электроэнергии, которые могут быть установлены на рабочей машине 10.
Рабочая машина 10 может дополнительно включать в себя различные приспособления 80, такие как, например, водяной насос, предназначенный для циркуляции охлаждающей воды (и/или этиленгликоля, и/или антифриза/другой охлаждающей жидкости) из двигателя 44, компрессор кондиционирования воздуха, двигатель-стартер, предназначенный для запуска двигателя 44, и/или другие различные устройства, которые обычно могут приводиться в движение ремнями, приводимыми двигателем 44. Эти различные приспособления 80 вместо ремней могут приводиться в движение от электроэнергии через электродвигатели. Это может обеспечить большую гибкость при размещении таких различных устройств на рабочей машине 10, поскольку больше не требуется обеспечивать возможность привода от двигателя 44 одним или больше ремнями, и может снизить стоимость деталей и сборки, а также стоимость технического обслуживания, связанного с отказом ремня, и необходимой в результате замены этой детали.
На фиг.3 иллюстрируется другой примерный вариант воплощения рабочей машины 10, имеющей электрический силовой привод 12. В отличие от примерного варианта воплощения, показанного на фиг.2, электрический силовой привод 12 на фиг.3 не включает с себя механическое соединение 66. Вместо этого электродвигатель 48 функционально соединен непосредственно с модулем 68 дифференциального управления. Такая конфигурация может устранить присущую неэффективность механического соединения 66, которое может включать в себя узел зубчатой передачи, например прямозубую и/или коническую зубчатую передачу. Кроме того, примерный вариант воплощения, иллюстрируемый на фиг. 3, позволяет обеспечить более эффективное использование пространства в пределах основной рамы 14 рабочей машины 10 и позволяет более эффективно упаковать электродвигатель 48 в комбинации с модулем 68 дифференциального управления.
На фиг.4 иллюстрируется еще один примерный вариант воплощения рабочей машины 10, имеющей электрическую силовую передачу 12. В отличие от примерных вариантов воплощения, показанных на фиг.2 и 3, электрическая силовая передача 12, представленная на фиг. 4, включает в себя более, чем один электродвигатель 48 (например, два электродвигателя 48), каждый из которых выполнен с возможностью привода одного из пары элементов 22, зацепляющихся за грунт (например, гусеницы, зацепляющейся за грунт).
В соответствии с вариантом воплощения, показанным на фиг.4, генератор 46 электрически соединен через силовую электронную схему 50, связанную с генератором 46, и, по меньшей мере, один (например, два) из силовых электронных модулей 60, связанных с двумя электродвигателями 48. Каждый из электродвигателей 48 соответственно соединен с элементами 34 и 36 привода. Силовая электронная схема 60 управляет двумя электродвигателями 48 таким образом, что они могут работать скоординировано для привода в движение рабочей машины 10 в направлении, соответствующем команде оператора. Например, путем избирательного применения большего или меньшего крутящего момента в прямом или в обратном направлении к элементам 34 и 36 привода электродвигатели 48 могут приводить в движение рабочую машину в направлении прямо вперед, в направлении прямо назад, в направлении, изгибающемся влево или вправо в направлении вперед, или в направлении, изгибающемся влево или вправо в направлении назад. Поскольку электродвигатели 48 позволяют избирательно применять больший или меньший крутящий момент к элементам 34 и 36 привода при их вращении вперед или назад, независимо друг от друга, модуль дифференциального управления, двигатель управления, устройство передачи мощности и/или управляющая система сцепления и тормоза могут быть исключены из этого варианта воплощения.
На фиг.5 иллюстрируется еще один примерный вариант воплощения рабочей машины 10, имеющий электрический силовой привод 12. В отличие от примерных вариантов воплощения, показанных на фиг.2-4, электрическая силовая передача 12, иллюстрируемая на фиг.5, включает в себя три электродвигателя 48, однако следует понимать, что два или больше электродвигателей 48 работают аналогично трем показанным двигателям, каждый из которых обеспечивает подачу энергии в модуль 68' планетарной передачи. Каждый электродвигатель 48 может быть функционально соединен с соответствующим контроллером 58 двигателя и силовым электронным модулем 60, который может быть выполнен с возможностью подачи электроэнергии и/или выполнения операции управления каждым из электродвигателей 48. Каждый электродвигатель 48 может передавать крутящий момент модулю 68' планетарной передачи таким образом, что рабочая машина 10 будет приводиться в движение и ею можно будет управлять по командам оператора.
Промышленная применимость
Раскрытая рабочая машина, имеющая электрическую силовую передачу, может применяться в любой рабочей машине, такой как, например, рабочие машины, имеющие гусеницы, зацепляющиеся за грунт, или в любой другой рабочей машине, известной в данной области техники, в которой могут быть желательными уменьшение выброса выхлопных газов и/или улучшенная эффективность потребления топлива, помимо прочего. Благодаря использованию электрической силовой передачи на рабочей машине выброс выхлопных газов может быть уменьшен и эффективность потребления топлива может быть повышена. Работа примерных рабочих машин, имеющих электрическую силовую передачу, поясняется ниже.
На фиг.2 показан двигатель 44, функционально соединенный с генератором 46, так что генератор 46 вращается, преобразуя таким образом механическую энергию двигателя 44 в электрическую энергию. Двигатель 44 может работать на одной или больше заданных скоростях двигателя (например, в определенном диапазоне скоростей двигателя), что позволяет свести к минимуму выброс выхлопных газов и обеспечить максимальную эффективность потребления топлива, поскольку скорость двигателя не связана непосредственно с крутящим моментом, прикладываемым к элементам 34 и 36 привода гусениц. Кроме того, двигатель 44 и генератор 46 могут быть функционально соединены, например, через соответствующую зубчатую передачу таким образом, что генератор 46 будет приводиться в движение с оптимальной скоростью вращения для обеспечения максимальной эффективности преобразования энергии в электрическую энергию.
Силовая электронная схема 50 и контроллер 52 генератора могут быть совместно связаны с генератором 46, например, для управления преобразованием механической энергии в электрическую энергию. Силовая электронная схема 60 и контроллер 58 двигателя могут быть совместно связаны с электродвигателем 48 для управляемой подачи электроэнергии в электродвигатель 48. Главный контроллер 64 может управлять двигателем 44, контроллером 52 генератора и/или контроллером 58 двигателя, приспособлениями 80, накопителем 56 электроэнергии или резистивной решеткой (не показана) для оптимизации скорости двигателя и нагрузки двигателя и/или скорости генератора, и/или нагрузки генератора для уменьшения (то есть сведения к минимуму) выбросов выхлопных газов и/или для увеличения (например, обеспечения максимальной) эффективности потребления топлива двигателем 44. Главный контроллер 64 позволяет обеспечить максимальную эффективность генератора 46 по преобразованию энергии в электроэнергию. Например, главный контроллер 64 можно использовать для обеспечения возможности работы двигателя 44 с относительно узким диапазоном скорости двигателя для обеспечения максимальной эффективности потребления топлива и/или сведения к минимуму выбросов выхлопных газов независимо от текущих требований мощности рабочей машины 10. Кроме того, главный контроллер 64 можно использовать для обеспечения максимальной эффективности работы генератора 46 путем оптимизации его нагрузки и/или скорости вращения.
Генератор 46 может обеспечивать электроэнергией систему 56 накопления электроэнергии и/или электродвигатель 48. Например, когда оператор рабочей машины передает команду в электрическую силовую передачу 12, соответствующее количество электроэнергии может быть обеспечено для электродвигателя 48. Электродвигатель 48 преобразует электроэнергию в крутящий момент и вращается либо в направлении вперед или в направлении назад в соответствии с командой оператора. Крутящий момент, формируемый электродвигателем 48, передают механическому соединению 66, которое преобразует этот крутящий момент электродвигателя 48 в соответствующую скорость и направление для использования модулем 68 дифференциального управления. Модуль 68 дифференциального управления использует одну или больше планетарных зубчатых передач для передачи крутящего момента в соответствующем количестве каждому из элементов 34 и 36 привода (например, элемента привода гусениц). Двигатель 74 управления избирательно приводит в движение часть (например, кольцевое зубчатое колесо) одной из планетарных зубчатых передач модуля 68 дифференциального управления, либо останавливая движение этой части, или вращая эту часть в первом направлении, или вращая эту часть во втором направлении. При остановке вращения этой части, по существу, равные величины скорости передаются на элементы 34 и 36 привода. При вращении этой части в первом направлении относительно большая скорость может быть передана на один из элементов 34 и 36 привода и при вращении этой части в другом направлении относительно большая скорость может быть передана на другой из элементов 34 и 36 привода. Передача, по существу, равной скорости на каждый из элементов 34 и 36 привода приводит к движению рабочей машины 10, по существу, по прямой линии. Передача относительно большей скорости на один из элементов 34 и 36 привода приводит к тому, что рабочая машина 10 либо поворачивает или движется нелинейно. Для помощи при повороте рабочей машины 10, остановке движения рабочей машины 10 и/или замедлении скорости при движении рабочей машины 10 одно или оба из устройств 70 и 72 торможения рабочей машины 10 могут быть активированы для приложения крутящего момента сопротивления к элементам 34 и 36 привода.
Что касается электроэнергии, которая может быть передана в систему 56 накопления электроэнергии, электроэнергия, запасаемая в системе 56 накопления электроэнергии, может использоваться, например, для запуска двигателя 44 и/или для обеспечения дополнительной электроэнергии для работы различных приспособлений рабочей машины 10, таких как, например, модуль кондиционирования воздуха и электрический водяной насос, предназначенный для циркуляции охлаждающей жидкости через двигатель 44 и/или различные системы жидкостного охлаждения рабочей машины 10. Система 56 накопления электроэнергии также может использоваться для подачи дополнительной электроэнергии, когда требуется дополнительная электроэнергия, например, когда рабочая машина 10 приводится в движение и одновременно с этим работает рабочий инструмент.
Электрическая силовая передача 12 может включать в себя устройства 70 и 72 торможения, которые могут быть выполнены с возможностью избирательного приложения тормозящей силы, в результате чего происходит замедление одного или обоих элементов 34 и 36 привода. Торможение также может быть обеспечено в результате включения двигателя/двигателей 48 в работу как генераторов, выполненных с возможностью замедления рабочей машины 10 путем подключения нагрузки, регенерирующей мощность, к элементам 34 и 36 привода. Например, когда рабочая машина 10 движется по спуску, рабочая машина 10 может замедляться, по меньшей мере частично, с использованием крутящего момента сопротивления, который генерируется одним или больше двигателем/двигателями 48, действующими как генераторы, выполненные с возможностью преобразования кинетической энергии рабочей машины 10, которая спускается вниз по наклону под действием силы тяжести, соединенной с элементами 34 и 36 привода, в электрическую энергию и для подачи этой электроэнергии в рабочую машину 10, например, для накопления электроэнергии в системе 56 накопления электроэнергии или для обратного привода через генератор 46, который работает как двигатель, для привода двигателя 44. В качестве альтернативы, электроэнергия, генерируемая одним или больше двигателем/двигателями 48, может рассеиваться через резистивную решетку.
Система 76 охлаждения может использоваться для охлаждения двигателя 44 вместе с различными элементами электрической силовой передачи 12, которая может быть герметизирована и может иметь жидкостное охлаждение. В частности, генератор 46 и/или электродвигатель 48 может быть герметизирован и может иметь жидкостное охлаждение для получения более долговечной и компактной конструкции, такой как, например, у электродвигателя 48, имеющего более высокую плотность мощности, и обладающей меньшей инерцией, что позволяет более быстро и эффективно останавливать машину и включать обратное направление движения.
Гидравлическая система 78 может использоваться для подачи гидравлической текучей среды под давлением, например, в устройство гидравлического привода, для обеспечения работы рабочих инструментов на рабочей машине 10. Например, как показано на фиг.1, гидравлическое исполнительное устройство, связанное с одним или больше цилиндрами 30 подъема, может быть приведено в действие для подъема и опускания рабочего инструмента 26, а гидравлические исполнительные устройства, соединенные с одним или больше цилиндрами 32 наклона, могут быть приведены в действие для наклона рабочего инструмента 26 влево и вправо. Кроме того, гидравлическая текучая среда под давлением может использоваться для обеспечения работы двигателя 74 управления для управления рабочей машиной 10.
В примерной электрической силовой передаче 12 рабочей машины, представленной на фиг.3, электродвигатель 48 может быть функционально соединен непосредственно с модулем 68 дифференциального управления для обеспечения крутящим моментом непосредственно модуля 68 дифференциального управления. Крутящий момент, передаваемый в модуль 68 дифференциального управления, используется для элементов 34 и 36 привода (например, элементов привода гусениц) таким же образом, как описано со ссылкой на примерный вариант воплощения, показанный на фиг.2.
Примерный вариант воплощения, показанный на фиг.4, включает в себя два электродвигателя 48. Генератор 46 функционально соединен с каждым из электродвигателей 48, и каждый электродвигатель 48 соединен с соответствующим одним из элементов 34 и 36 привода (например, элементами привода в движение гусениц). Например, генератор 46 может быть функционально соединен с силовой электронной схемой 50, контроллером 52 генератора и датчиком 54 генератора, и каждый электродвигатель 48 может быть функционально соединен с контроллером 58 двигателя, силовой электронной схемой 60 и датчиком 62 двигателя. Главный контроллер 64 может управлять контроллером 52 генератора и контроллерами 58 двигателя, которые, в свою очередь, соответственно управляют силовой электронной схемой 50, которая соединена с генератором 46 и каждой из силовых электронных схем 60, соединенных с каждым из электродвигателей 48 таким образом, что они могут работать в скоординированном режиме для привода в движение рабочей машины 10 в направлении, соответствующем команде оператора. Например, путем избирательного приложения большей или меньшей скорости в направлении вперед или назад к элементам 34 и 36 электродвигатели 48 могут приводить рабочую машину 10 в движение в прямом направлении вперед, в прямом направлении назад, в направлении, изгибающемся влево или изгибающемся вправо, как при движении вперед, так и при движении назад.
Примерный вариант воплощения, показанный на фиг.5, включает в себя три электродвигателя 48, однако могут использоваться два или больше двигателей, выполненных с возможностью передачи мощности в модуль 68' планетарной зубчатой передачи. Генератор 46 функционально соединен с каждым из электродвигателей 48, а каждый из электродвигателей 48 соединен с модулем 68' планетарной зубчатой передачи, который, в свою очередь, функционально соединен с элементами 34 и 36 привода. Например, генератор 46 может быть функционально соединен с силовой электронной схемой 50, контроллером 52 генератора и датчиком 54 генератора (как упомянуто ранее, вместо силовой электронной схемы 52 может использоваться выпрямитель, и датчик 54 генератора может не потребоваться в зависимости от используемой логики управления), и каждый электродвигатель 48 может быть функционально соединен с контроллером 58 двигателя, с силовой электронной схемой 60 и датчиком 62 двигателя. Главный контроллер 64 может управлять контроллером 52 генератора и контроллерами 58 двигателя, которые, в свою очередь, соответственно управляют силовой электронной схемой 50, соединенной с генератором 46, и каждой из силовых электронных схем 60, связанных с каждым из электродвигателей 48, таким образом, что они могут скоординировано работать для передачи мощности к модулю 68' планетарной зубчатой передачи и привода рабочей машины 10 в направлении, соответствующем команде оператора. Например, путем избирательного управления тремя электродвигателями 48 скоординированным образом через главный контроллер 64 электродвигатели 48 могут приводить рабочую машину 10 в движение в прямом направлении вперед, в прямом направлении назад, в направлении, изгибающемся влево или изгибающемся вправо, как при движении вперед, так и при движении в направлении назад.
Для специалистов в данной области техники будет понятно, что различные модификации и варианты могут быть выполнены в отношении раскрытой рабочей машины, имеющей электрическую силовую передачу. Другие варианты воплощения будут понятны для специалиста в данной области техники с учетом описания и применения на практике раскрытой рабочей машины. Предполагается, что данное описание и примеры следует рассматривать только как примерные, при этом истинный объем изобретения определен формулой изобретения и ее эквивалентами.
Реферат
Изобретение относится к рабочим машинам, в частности таким, как бульдозеры погрузчики и другие машины, имеющие гусеницы и приводимые электрической силовой передачей. Электрическая силовая передача включает в себя двигатель, выполненный с возможностью обеспечения механической энергии, и генератор, функционально соединенный с двигателем и выполненный с возможностью преобразования, по меньшей мере, части механической энергии в электрическую энергию. Электрическая силовая передача дополнительно включает в себя, по меньшей мере, один электродвигатель функционально соединенный с генератором, множество элементов привода и, по меньшей мере, один силовой электронный модуль, выполненный с возможностью управления двигателем и/или генератором. По меньшей мере, один электродвигатель выполнен с возможностью передачи крутящего момента к элементам привода. 2 н. и 6 з.п. ф-лы, 5 ил.
Комментарии