Способ для управления гибридным транспортным средством и устройство для управления гибридным транспортным средством - RU2707471C1
Код документа: RU2707471C1
Чертежи






Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу для управления гибридным транспортным средством и к устройству для управления гибридным транспортным средством.
Уровень техники
[0002] В транспортном средстве, включающем в себя электромотор и двигатель в качестве источников мощности приведения в движение, когда крутящий момент электромотора пересекает 0 Нм в ходе работы двигателя, шум от возникновения люфта (дребезжащий шум) возникает вследствие столкновения между шестернями. В технологии 2009-298266A JP, когда крутящий момент электромотора находится в пределах предварительно определенного диапазона около 0 Нм, дребезжащий шум уменьшается за счет увеличения целевой частоты вращения двигателя.
Сущность изобретения
[0003] Тем не менее, в технологии JP 2009-298266A, которая увеличивает частоту вращения двигателя для уменьшения дребезжащего шума, имеется проблема в том, что шум от двигателя увеличивается.
[0004] Между тем, вышеописанная проблема может возникать при условии, что электромотор и двигатель соединяются между собой через шестерни. Следовательно, проблема, идентичная проблеме, описанной выше, возникает также в транспортном средстве, включающем в себя двигатель в качестве источника мощности для электрогенератора, чтобы вырабатывать электрическую мощность, т.е. не двигатель в качестве источника мощности приведения в движение транспортного средства.
[0005] Когда крутящий момент, передаваемый между двигателем и электрогенератором, является относительно небольшим, дребезжащий шум возникает вследствие столкновения между шестернями, передающими мощность между двигателем и электрогенератором, причем столкновение между шестернями возникает за счет пульсации крутящего момента вследствие движения поршня во время вращения двигателя. Например, в состоянии прокрутки двигателя, к примеру, при проворачивании двигателя с использованием мощности электрогенератора, крутящий момент двигателя представляет собой только трение и подвержен воздействию пульсации крутящего момента, так что дребезжащий шум имеет тенденцию к возникновению. Тем не менее, поскольку управление крутящим моментом посредством двигателя не может выполняться в состоянии прокрутки двигателя, невозможно уменьшать дребезжащий шум, используя двигатель.
[0006] Цель настоящего изобретения заключается в том, чтобы предоставлять технологию, которая исключает дребезжащий шум посредством управления частотой вращения электрогенератора без необходимости увеличивать частоту вращения двигателя.
[0007] Согласно одному варианту осуществления настоящего изобретения, способ управления для гибридного транспортного средства, включающего в себя двигатель и электрогенератор, который вырабатывает электрическую мощность с использованием мощности от двигателя, соединенного с электрогенератором через шестерни, при этом способ управления включает в себя этап вычисления крутящего момента для управления частотой вращения, на основе значения команды управления частотой вращения для электрогенератора и значения определения частоты вращения электрогенератора, для вычисления значения команды управления крутящим моментом для управления частотой вращения электрогенератора и этап управления электрогенератором для управления электрогенератором согласно значению команды управления крутящим моментом. Этап вычисления крутящего момента для управления частотой вращения вычисляет, с использованием модуля компенсации для согласования с моделью и на основе значения, полученного посредством фильтрации значения определения частоты вращения через фильтр низких частот, и значения команды управления частотой вращения, базовое значение команды управления крутящим моментом, которое приводит к тому, что отклик крутящего момента электрогенератора совпадает с предварительно установленным откликом модели, вычисляет, с использованием модуля наблюдения возмущений, включающего в себя передаточную функцию, состоящую из инверсивной системы управляющей объектной модели, составленной на основе системы передачи мощности электрогенератора, соединенного с двигателем через шестерни, и фильтра модуля наблюдения возмущений, и на основе значения определения частоты вращения, возмущающий крутящий момент, который вводится в систему передачи мощности, и вычисляет значение команды управления крутящим моментом на основе базового значения команды управления крутящим моментом и возмущающего крутящего момента. Относительная степень фильтра модуля наблюдения возмущений задается таким образом, что относительная степень передаточной функции становится 1 или более.
[0008] Далее подробно описываются варианты осуществления настоящего изобретения с прилагаемыми чертежами.
Краткое описание чертежей
[0009] Фиг. 1 является схемой конфигурации системы транспортного средства, к которому применяется устройство управления для гибридного транспортного средства варианта осуществления.
Фиг. 2 является блок-схемой управления контроллера электрогенератора.
Фиг. 3 является блок-схемой модуля управления частотой вращения.
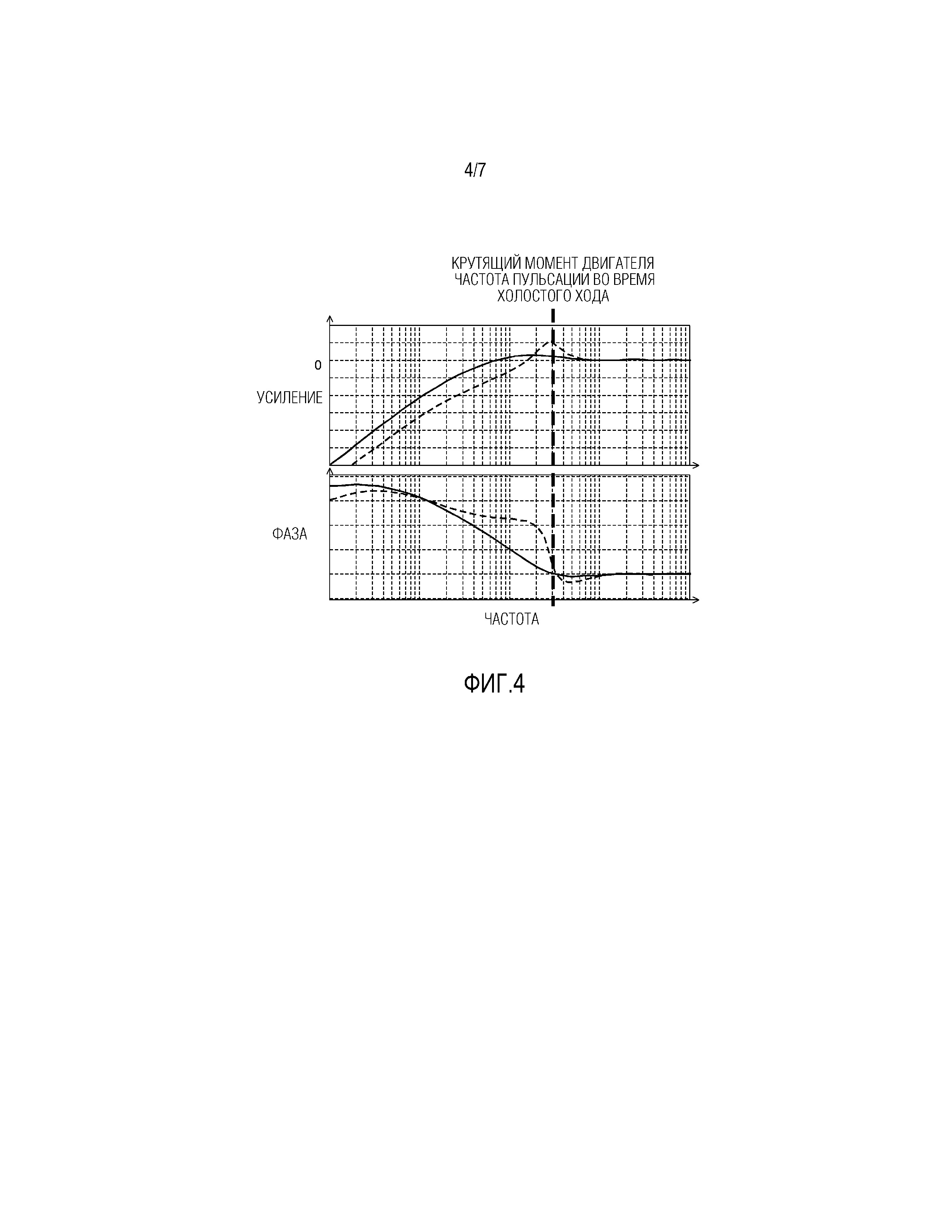
Фиг. 4 является графиком Боде традиционного управления частотой вращения.
Фиг. 5 является диаграммой формы сигнала временных рядов, показывающей результаты управления для традиционного управления частотой вращения.
Фиг. 6 является графиком Боде управления частотой вращения варианта осуществления.
Фиг. 7 является диаграммой формы сигнала временных рядов, показывающей результаты управления для управления частотой вращения варианта осуществления.
Оптимальный режим осуществления изобретения
[0010] Вариант осуществления
Фиг. 1 является блок-схемой, показывающей конфигурацию системы гибридного транспортного средства, к которому применяется устройство управления гибридного транспортного средства в варианте осуществления настоящего изобретения. Фиг. 1 показывает пример конфигурации, в котором устройство управления применяется к последовательному гибридному транспортному средству, оснащенному электромотором для выработки мощности (в дальнейшем называемым "электрогенератором 1") и электромотором для приведения в действие (в дальнейшем называемым "приводным электромотором 6"). Как показано на чертеже, гибридное транспортное средство этого варианта осуществления включает в себя электрогенератор 1, двигатель 2, шестерни 8, инвертор 3 электрогенератора, аккумулятор 4, приводной инвертор 5, приводной электромотор 6, редуктор 7, контроллер 9 двигателя, контроллер 10 аккумулятора, контроллер 11 приводного электромотора, системный контроллер 12, модуль 13 управления выработкой мощности и контроллер 14 электрогенератора.
[0011] Двигатель 2 соединяется с электрогенератором 1 через шестерни 8 и передает мощность в электрогенератор 1 для предоставления возможности электрогенератору 1 вырабатывать электрическую мощность. Поскольку транспортное средство, к которому применяется устройство управления гибридного транспортного средства этого варианта осуществления, имеет последовательный тип, двигатель 2 используется только в качестве источника приведения в движение для вращательного приведения в действие электрогенератора 1.
[0012] Электрогенератор 1 вращается посредством мощности от двигателя 2, чтобы вырабатывать электрическую мощность. Дополнительно, электрогенератор 1 также выполняет прокрутку двигателя, чтобы потреблять электрическую мощность посредством проворачивания двигателя 2 с использованием мощности электрогенератора 1 при запуске двигателя 2 или посредством дополнительного прокручивания при работе двигателя 2 с использованием мощности электрогенератора 1.
[0013] Инвертор 3 электрогенератора соединяется с электрогенератором 1, аккумулятором 4 и приводным инвертором 5 и преобразует мощность переменного тока, сформированную посредством электрогенератора 1, в мощность постоянного тока. Дополнительно, инвертор 3 электрогенератора преобразует мощность постоянного тока, подаваемую из аккумулятора 4, в мощность переменного тока и подает мощность переменного тока в электрогенератор 1.
[0014] Приводной инвертор 5 преобразует мощность постоянного тока, подаваемую из аккумулятора 4 или инвертора 3 электрогенератора, в мощность переменного тока и подает мощность переменного тока в приводной электромотор 6. Дополнительно, приводной инвертор 5 преобразует мощность переменного тока, рекуперированную посредством приводного электромотора 6, в мощность постоянного тока и подает мощность постоянного тока в аккумулятор 4.
[0015] Приводной электромотор 6 формирует движущую силу посредством переменного тока, подаваемого из приводного инвертора 5, и передает движущую силу на ведущие колеса через редуктор 7. Дополнительно, приводной электромотор 6 формирует рекуперативную движущую силу при вращении от ведущих колес во время замедления транспортного средства, движения по инерции транспортного средства и т.п., за счет этого восстанавливая кинетическую энергию транспортного средства в качестве электрической энергии.
[0016] Контроллер 9 двигателя регулирует объем всасываемого воздуха посредством исполнительного устройства дросселя, объем впрыска топлива посредством инжекторов и распределение зажигания посредством свеч зажигания согласно сигналам состояния, таким как частота вращения и температура двигателя 2, так что крутящий момент двигателя совпадает со значением команды управления крутящим моментом двигателя из системного контроллера 12.
[0017] Контроллер 10 аккумулятора измеряет состояние заряда (SOC: состояние заряда) на основе тока и напряжения, которые заряжаются и разряжаются в/из аккумулятора 4, и передает измеренную информацию в системный контроллер 12. Дополнительно, контроллер 10 аккумулятора вычисляет вводимую электрическую мощность и выводимую электрическую мощность аккумулятора 4 согласно температуре, внутреннему сопротивлению и SOC аккумулятора 4 и передает вычисленные значения в системный контроллер 12.
[0018] Контроллер 11 приводного электромотора выполняет управление переключением приводного инвертора 5 согласно состояниям, таким как частота вращения и напряжение, приводного электромотора 6, так что крутящий момент приводного электромотора совпадает со значением команды управления крутящим моментом электромотора из системного контроллера 12.
[0019] Системный контроллер 12 вычисляет значение команды управления крутящим моментом электромотора для приводного электромотора 6 согласно такой информации, как состояния транспортного средства, включающие в себя позицию акселератора, скорость транспортного средства и уклон поверхности дороги, информация SOC, вводимая электрическая мощность и выводимая электрическая мощность из контроллера 10 аккумулятора и вырабатываемая электрическая мощность электрогенератора 1. Дополнительно, системный контроллер 12 вычисляет целевую электрическую мощность для выработки мощности для подачи из электрогенератора 1 в аккумулятор 4 или приводной электромотор 6.
[0020] Чтобы достигать целевой электрической мощности для выработки мощности, модуль 13 управления выработкой мощности в системном контроллере 12 вычисляет значение команды управления крутящим моментом двигателя, которое должно предоставляться в контроллер 9 двигателя, и значение ωG* команды управления частотой вращения для электрогенератора, которое должно предоставляться в контроллер 14 электрогенератора.
[0021] Контроллер 14 электрогенератора выполняет управление переключением инвертора 3 электрогенератора согласно состояниям, таким как значение определения частоты вращения и напряжение, электрогенератора 1, так что частота вращения электрогенератора совпадает со значением команды управления частоты вращения электрогенератора из системного контроллера 12.
[0022] Фиг. 2 является блок-схемой управления для пояснения управления переключением инвертора 3 электрогенератора, которое выполняется посредством контроллера 14 электрогенератора.
[0023] Контроллер 14 электрогенератора включает в себя модуль 20 управления частотой вращения, модуль 21 вычисления значений команд управления током, модуль 22 управления по току, модуль 23 управления помехозащищенностью, преобразователь 24 трехфазного в двухфазный ток и преобразователь 25 двухфазного в трехфазное напряжение.
[0024] На основе значения ωG* команды управления частотой вращения из системного контроллера 12 и значения ωG определения частоты вращения электрогенератора 1, модуль 20 управления частотой вращения вычисляет значение T* команды управления крутящим моментом для управления частотой вращения электрогенератора 1. Значение ωG определения частоты вращения определяется посредством устройства определения частоты вращения (например, кругового датчика позиции, датчика позиции и т.п.), присоединяемого к электрогенератору 1.
[0025] Модуль 21 вычисления значений команд управления током вычисляет значение id* команды управления током d-оси и значение iq* команды управления током q-оси на основе значения T* команды управления крутящим моментом, значения ωG определения частоты вращения и напряжения Vdc аккумулятора для аккумулятора 4. Таблица, задающая взаимосвязь значения команды управления током d-оси и значения команды управления током q-оси со значением команды управления крутящим моментом, частотой вращения электрогенератора и значением постоянного напряжения, может подготавливаться заранее, и целевое значение id* тока d-оси и целевое значение iq* тока q-оси могут получаться посредством обращения к этой таблице.
[0026] Модуль 22 управления по току вычисляет значения vd*, vq* команд управления напряжением d-оси и q-оси на основе значений id*, iq* команд управления током d-оси и q-оси, токов id, iq d-оси и q-оси, вычисленных посредством преобразователя 24 трехфазного в двухфазный ток, и значения ωG определения частоты вращения.
[0027] На основе токов id, iq d-оси и q-оси, модуль 23 управления помехозащищенностью вычисляет управляющее напряжение помехозащищенности, которое необходимо для значений vd*, vq* команд управления напряжением d-оси и q-оси, чтобы подавлять напряжение помех между ортогональными осями координат d-q.
[0028] Преобразователь 24 трехфазного в двухфазный ток вычисляет токи id, iq d-оси и q-оси на основе, по меньшей мере, двухфазных токов (например, тока iu U-фазы и тока iv V-фазы) из трехфазных переменных токов, которые подаются из инвертора 3 электрогенератора в электрогенератор 1.
[0029] Преобразователь 25 двухфазного в трехфазное напряжение вычисляет значения Vu*, Vv*, Vw* команд управления трехфазным напряжением для U-, V- и W-фаз посредством выполнения преобразования координат на основе значений v'd*, v'q* команд управления конечным напряжением, в которых учитывается управляющее напряжение помехозащищенности.
[0030] Инвертор 3 электрогенератора включает в себя две пары переключающих элементов (например, силовых полупроводниковых элементов, таких как IGBT или MOSFET) для каждой фазы. Инвертор 3 электрогенератора преобразует мощность постоянного тока, подаваемую из аккумулятора 4, в переменные напряжения Vu, Vv, Vw посредством включения и выключения переключающих элементов согласно значениям Vu*, Vv*, Vw* команд управления трехфазным напряжением, сформированным посредством контроллера 14 электрогенератора, и подает переменные напряжения Vu, Vv, Vw в электрогенератор 1.
[0031] Далее описываются подробности системы управления частотой вращения посредством устройства управления для гибридного транспортного средства в этом варианте осуществления.
[0032] Фиг. 3 является схемой для пояснения системы управления частотой вращения в этом варианте осуществления и является блок-схемой, главным образом показывающей подробности модуля 20 управления частотой вращения (см. фиг. 2). Модуль 20 управления частотой вращения включает в себя модуль 301 компенсации для согласования с моделью, модуль 302 наблюдения возмущений и вычитатель 303.
[0033] На основе значения ωG* команды управления частотой вращения и значения ωG определения частоты вращения в качестве вводов, модуль 20 управления частотой вращения выводит значение T* команды управления крутящим моментом. В модуле 21 вычисления значений команд управления током, значение T* команды управления крутящим моментом становится крутящим моментом T, в котором учитывается задержка 40 (Gact(s)) отклика крутящего момента электрогенератора 1, представляющего собой физический задерживающий элемент, и крутящий момент T передается в объект 41 (Gp(s)) управления. В настоящем изобретении, система от ввода значения ωG* команды управления частотой вращения до тех пор, пока крутящий момент T не вводится в объект Gp управления, так что электрогенератор 1 управляется до частоты ωG вращения, задается как система управления частотой вращения. Дополнительно, система передачи мощности электрогенератора 1, соединенного с двигателем 2 через шестерни 8, задается как объект управления.
[0034] Задержка Gact(s) отклика крутящего момента, которая учитывается в значении T* команды управления крутящим моментом в модуле 21 вычисления значений команд управления током, задается посредством следующей формулы.
[0035] Математическое выражение 1

[0036] где s является оператором Лапласа, и Tact является постоянной времени задержки отклика крутящего момента.
[0037] Объект Gp(s) управления принимает крутящий момент T и выводит частоту ωG вращения. Объект Gp(s) управления задается посредством следующей формулы.
[0038] Математическое выражение 2

[0039] где J и C являются параметрами, указывающими состояния объекта управления. J является полной инерцией (моментом инерции) электрогенератора 1, двигателя 2 и шестерней 8, размещенных между электрогенератором 1 и двигателем 2 с точки зрения вращательного вала электрогенератора 1. C является коэффициентом вязкостного трения.
[0040] Модуль 301 компенсации для согласования с моделью включает в себя усиление 31 (Kgc), усиление 33 (Kcp), фильтр 34 (HMM(s)) модуля компенсации для согласования с моделью и вычитатель 32. Модуль 301 компенсации для согласования с моделью выводит, в качестве базового значения команды управления крутящим моментом, значение, полученное посредством умножения разности между значением, полученным посредством умножения значения ωG* команды управления частотой вращения на усиление Kgc, и значением, полученным посредством фильтрации значения ωG определения частоты вращения через фильтр HMM(s) модуля компенсации для согласования с моделью, на усиление Kcp.
[0041] Усиление Kgc и усиление Kcp задаются таким образом, что отклик частоты ωG вращения на крутящий момент T, вводимый в объект Gp(s) управления, становится откликом модели, заданным разработчиком, и задается посредством следующих формул (3).
[0042] Математическое выражение 3

[0043] где Tm является постоянной времени отклика модели, J' является расчетным значением или измеренным значением полной инерции электрогенератора 1, шестерней 8 и двигателя 2 с точки зрения вала электрогенератора, и C' является расчетным значением коэффициента вязкостного трения. Таким образом, J' и C' задаются равными фактическому объекту управления.
[0044] Фильтр HMM(s) модуля компенсации для согласования с моделью представляет собой фильтр низких частот первого порядка и задается посредством следующей формулы.
[0045] Математическое выражение 4

[0046] где TMM является постоянной времени фильтра HMM(s) модуля компенсации для согласования с моделью.
[0047] Постоянная TMM времени задается таким образом, чтобы сглаживать значения определения частоты вращения для обратной связи. Следовательно, можно исключать то, что когда флуктуация частоты вращения вследствие люфта шестерней 8 и пульсации крутящего момента двигателя 2, возвращается как есть, ее компоненты вибрации до и после обратной связи резонируют друг с другом, что стимулирует дребезжащий шум.
[0048] Модуль 302 наблюдения возмущений предоставляется для оценки возмущений d, которые вводятся в систему управления частотой вращения, и для их подавления. Модуль 302 наблюдения возмущений включает в себя задержку 35 на определение частоты вращения, задержку 36 (Gact(s)) отклика крутящего момента, управляющую объектную модель Gp'(s), вычитатель 38 и передаточную функцию 39 (Hd(s)/Gp'(s)), состоящую из инверсивной системы управляющей объектной модели Gp'(s) и фильтра Hd(s) модуля наблюдения возмущений.
[0049] Задержка 35 на определение частоты вращения обрабатывается в качестве времени нечувствительности и выполняет процесс, чтобы задерживать обработку на время задержки на определение частоты вращения электрогенератора 1.
[0050] Управляющая объектная модель Gp'(s) представляет собой модель, сконфигурированную быть равной фактическому объекту управления. Управляющая объектная модель Gp'(s) задается посредством следующей формулы.
[0051] Математическое выражение 5

[0052] где J' является расчетным значением или измеренным значением полной инерции электрогенератора 1, двигателя 2 и шестерней 8, размещенных между электрогенератором 1 и двигателем 2 с точки зрения вала электрогенератора, и C' является расчетным значением коэффициента вязкостного трения. Таким образом, J' и C' задаются равными фактическому объекту управления.
[0053] Фильтр Hd(s) модуля наблюдения возмущений представляет собой фильтр низких частот второго порядка и предоставляется для задания соответствующей инверсивной системы управляющей объектной модели Gp'(s). Фильтр Hd(s) модуля наблюдения возмущений задается посредством следующей формулы.
[0054] Математическое выражение 6

[0055] где Td является постоянной времени фильтра модуля наблюдения возмущений. Соответствие в настоящем изобретении задается таким образом, что относительная степень между степенью знаменателя и степенью числителя равна нулю или более, т.е. "степень знаменателя≥степень числителя".
[0056] Когда фильтр Hd(s) модуля наблюдения возмущений задается посредством формулы (6), передаточная функция Hd(s)/Gp'(s), состоящая из инверсивной системы управляющей объектной модели Gp'(s) и фильтра Hd(s) модуля наблюдения возмущений, задается посредством следующей формулы.
[0057] Математическое выражение 7

[0058] Следовательно, передаточная функция Hd(s)/Gp'(s) становится такой, что степень полинома знаменателя (степень знаменателя) выше степени полинома числителя (степени числителя), и в силу этого степень знаменателя передаточной функции Hd(s)/Gp'(s) становится выше минимальной степени, требуемой для обеспечения соответствия. Таким образом, фильтр Hd(s) модуля наблюдения возмущений этого варианта осуществления задается таким образом, что относительная степень (степень знаменателя-степень числителя) передаточной функции Hd(s)/Gp'(s) становится 1 или более. Как результат, передаточная функция Hd(s)/Gp'(s) может уменьшать усиление на стороне высоких частот значения определения частоты вращения, которое возвращается в модуле 302 наблюдения возмущений.
[0059] Затем вычитатель 303 вычитает возмущающий крутящий момент T_d, представляющий собой вывод модуля 302 наблюдения возмущений, из базового значения команды управления крутящим моментом, представляющего собой вывод модуля 301 компенсации для согласования с моделью, чтобы выводить значение T* команды управления крутящим моментом.
[0060] Следовательно, при управлении частотой вращения электрогенератора 1, даже когда значение определения частоты вращения возвращается, дребезжащий шум не стимулируется и может уменьшаться. Соответственно, дребезжащий шум может исключаться посредством управления частотой вращения электрогенератора 1, не требуя крутящего момента двигателя 2, так что необязательно увеличивать частоту вращения двигателя для исключения дребезжащего шума, как традиционно требуется, и в силу этого обеспечивается прокрутка двигателя без дребезжащего шума.
[0061] Далее подробно описывается способ для задания постоянной TMM времени фильтра HMM(s) модуля компенсации для согласования с моделью и постоянной Td времени фильтра Hd(s) модуля наблюдения возмущений.
[0062] При рассмотрении с точки зрения графика Боде, постоянная TMM времени и постоянная Td времени задаются таким образом, что усиление на стороне высоких частот при условии, что ввод и вывод модуля 301 компенсации для согласования с моделью представляют собой частоты вращения электрогенератора 1, и усиление на стороне высоких частот при условии, что ввод и вывод модуля 302 наблюдения возмущений представляют собой частоты вращения электрогенератора 1, равны друг другу. Более конкретно, чтобы задавать усиления на стороне высоких частот равными друг другу, постоянная TMM времени фильтра HMM(s) модуля компенсации для согласования с моделью и постоянная Td времени фильтра Hd(s) модуля наблюдения возмущений могут задаваться таким образом, чтобы удовлетворять следующей формуле.
[0063] Математическое выражение 8

[0064] Посредством задания постоянной TMM времени и постоянной Td времени таким образом, даже когда постоянные фильтра для фильтра HMM(s) модуля компенсации для согласования с моделью и фильтра Hd(s) модуля наблюдения возмущений задаются отдельно, поскольку передаточные характеристики на стороне высоких частот, которые вызывают дребезжащий шум, уникально определяются, фильтры могут легко адаптироваться.
[0065] В данном документе, в дальнейшем описывается проблема, связанная с управлением частотой вращения, при котором нижеописанное противодействие дребезжащего шума не рассматривается в передаточной функции из значения ωG* команды управления частотой вращения в крутящий момент T, показанный на фиг. 3 со ссылкой на фиг. 4. Фиг. 4 является графиком Боде частотной характеристики, связанной с традиционным управлением частотой вращения.
[0066] Сплошные линии на фиг. 4 представляют частотную характеристику передаточной функции в случае, если полная инерция электрогенератора 1, двигателя 2 и шестерней 8, соединяющих электрогенератор 1 и двигатель 2, равна инерции J объекта Gp(s) управления (в дальнейшем также называется "случаем, отличным от периода мертвой зоны"). С другой стороны, пунктирные линии на фиг. 4 представляют частотную характеристику передаточной функции в случае, если инерция J объекта Gp(s) управления представляет собой только инерцию электрогенератора 1 вследствие разделения зубьев шестерней, вызываемого посредством влияния люфта шестерней (в дальнейшем также называется "случаем периода мертвой зоны"). Период мертвой зоны представляет собой период, в который мощность не передается между электрогенератором 1 и двигателем 2 вследствие влияния люфта шестерней 8.
[0067] В данном документе, двигатель, в общем, работает на частоте вращения на холостом ходу или более (например, 800 об/мин или более), и состояние частоты вращения на холостом ходу или менее проходит до завершения запуска двигателя от проворачивания (состояния прокрутки двигателя). В этом случае, двигатель 2 работает с возможностью быстро проходить через резонансную частоту, за счет этого предотвращая формирование вибрации и т.п. вследствие резонанса. В случае, например, четырехтактного двигателя, пульсация крутящего момента вследствие накачки возникает в числе цилиндров, умноженном на половину порядка вращения. В этом случае, частота пульсации крутящего момента во время холостого хода становится частотой, указываемой посредством пунктирной линии, нарисованной вертикально на фиг. 4.
[0068] Нормально, как указано посредством сплошных линий на фиг. 4, управление частотой вращения электрогенератора 1 спроектировано таким образом, что частотная характеристика передаточной функции в период, отличный от периода мертвой зоны (сплошные линии), не имеет резонанса во время холостого хода. Тем не менее, при традиционном управлении частотой вращения, в период мертвой зоны (пунктирные линии), частота, которая вызывает резонанс (частота, на которой усиление частотной характеристики становится приблизительно 0 дБ или более), изменяется к стороне высоких частот согласно уменьшению полной инерции объекта управления, приводя к частотной характеристике с высоким резонансным усилением. Следовательно, при традиционном управлении частотой вращения, резонанс возникает на частоте, равной или выше частоты пульсации крутящего момента двигателя во время холостого хода.
[0069] Фиг. 5 является схемой, показывающей формы сигнала временных рядов крутящего момента, частоты вращения и вибрации шестерней во время холостого хода при традиционном управлении частотой вращения, показанном на фиг. 4. Как показано на чертеже, пульсация крутящего момента и флуктуация частоты вращения не уменьшаются, и форма сигнала, указывающая вибрацию шестерней, нарушается, так что возникает столкновение между шестернями, которое вызывает дребезжащий шум.
[0070] Во избежание этой проблемы, в этом варианте осуществления, постоянная TMM времени фильтра HMM(s) модуля компенсации для согласования с моделью и постоянная Td времени фильтра Hd(s) модуля наблюдения возмущений задаются на графике Боде таким образом, что резонансная характеристика передаточной характеристики в системе управления частотой вращения, когда момент инерции системы передачи мощности объекта управления равен инерции электромотора, становится равной или меньше частоты пульсации двигателя на частоте вращения на холостом ходу (нижней предельной рабочей частоте вращения) двигателя 2.
[0071] Фиг. 6 является графиком Боде частотной характеристики при управлении частотой вращения этого варианта осуществления, в котором постоянная TMM времени и постоянная Td времени задаются так, как описано выше. Как на фиг. 4, сплошные линии на чертеже представляют частотную характеристику передаточной функции в период, отличный от периода мертвой зоны, и пунктирные линии на чертеже представляют частотную характеристику передаточной функции в период мертвой зоны.
[0072] Как показано на чертеже, в этом варианте осуществления, посредством регулирования постоянной TMM времени и постоянной Td времени, как описано выше, частота, которая вызывает резонанс, изменяется на сторону низких частот относительно частоты пульсации крутящего момента двигателя во время холостого хода в период мертвой зоны. Следовательно, поскольку резонанс в нормальном рабочем диапазоне двигателя может исключаться, можно исключать формирование дребезжащего шума.
[0073] Фиг. 7 является схемой, показывающей формы сигнала временных рядов крутящего момента, частоты вращения и вибрации шестерней во время холостого хода при управлении частотой вращения этого варианта осуществления, показанного на фиг. 6. Как показано на чертеже, пульсация крутящего момента и флуктуация частоты вращения уменьшаются, и форма сигнала, указывающая вибрацию шестерней, раскрывает, что столкновение между шестернями, которое вызывает дребезжащий шум, не возникает.
[0074] Устройство управления для гибридного транспортного средства варианта осуществления представляет собой устройство управления, которое реализует способ управления для гибридного транспортного средства, включающего в себя двигатель 2 и электрогенератор 1, который вырабатывает электрическую мощность с использованием мощности от двигателя 2, соединенного с электрогенератором 1 через шестерни 8, при этом устройство управления включает в себя модуль вычисления крутящего момента для управления частотой вращения, выполненный с возможностью, на основе значения команды управления частотой вращения для электрогенератора 1 и значения определения частоты вращения электрогенератора 1, вычислять значение команды управления крутящим моментом для управления частотой вращения электрогенератора, и модуль управления электрогенератором, выполненный с возможностью управлять электрогенератором согласно значению команды управления крутящим моментом. Модуль вычисления крутящего момента для управления частотой вращения вычисляет, с использованием модуля 301 компенсации для согласования с моделью и на основе значения, полученного посредством фильтрации значения определения частоты вращения через фильтр низких частот (фильтр 34 модуля компенсации для согласования с моделью), и значения команды управления частотой вращения, базовое значение команды управления крутящим моментом, которое приводит к тому, что отклик крутящего момента электрогенератора 1 совпадает с предварительно установленным откликом модели, вычисляет, с использованием модуля 302 наблюдения возмущений, включающего в себя передаточную функцию Hd(s)/Gp'(s), состоящую из инверсивной системы управляющей объектной модели Gp'(s), составленной на основе системы передачи мощности электрогенератора 1, соединенного с двигателем 2 через шестерни 8, и фильтра Hd(s) модуля наблюдения возмущений, и на основе значения определения частоты вращения, возмущающий крутящий момент T_d, который вводится в систему передачи мощности, и вычисляет значение команды управления крутящим моментом на основе базового значения команды управления крутящим моментом и возмущающего крутящего момента T_d. Относительная степень фильтра Hd(s) модуля наблюдения возмущений задается таким образом, что относительная степень передаточной функции Hd(s)/Gp'(s) становится 1 или более.
[0075] Следовательно, при управлении частотой вращения электрогенератора 1, поскольку значение определения частоты вращения возвращается таким образом, что усиление на стороне высоких частот значения определения частоты вращения уменьшается с использованием фильтра низких частот первого порядка (фильтра HMM(s) модуля компенсации для согласования с моделью) и фильтра низких частот второго порядка (фильтра Hd(s) модуля наблюдения возмущений), даже когда значение определения частоты вращения возвращается, дребезжащий шум не стимулируется. Соответственно, дребезжащий шум может исключаться посредством управления частотой вращения электрогенератора 1 без необходимости увеличивать частоту вращения двигателя 2, и в силу этого становится возможным прокрутка двигателя без дребезжащего шума.
[0076] Дополнительно, согласно устройству управления для гибридного транспортного средства варианта осуществления, постоянная TMM времени фильтра 34 модуля компенсации для согласования с моделью, включенного в модуль 301 компенсации для согласования с моделью, и постоянная Td времени фильтра модуля наблюдения возмущений, включенного в модуль 302 наблюдения возмущений, задаются на графике Боде таким образом, что усиление на стороне высоких частот при условии, что ввод и вывод модуля компенсации для согласования с моделью представляют собой частоты вращения электрогенератора, и усиление на стороне высоких частот при условии, что ввод и вывод модуля 302 наблюдения возмущений представляют собой частоты вращения электрогенератора, равны друг другу. Следовательно, поскольку передаточные характеристики на стороне высоких частот модуля 301 компенсации для согласования с моделью и фильтра модуля наблюдения возмущений, которые вызывают дребезжащий шум, могут уникально определяться, фильтры могут легко адаптироваться.
[0077] Дополнительно, согласно устройству управления для гибридного транспортного средства варианта осуществления, постоянная TMM времени фильтра 34 модуля компенсации для согласования с моделью, включенного в модуль 301 компенсации для согласования с моделью, и постоянная Td времени фильтра модуля наблюдения возмущений, включенного в модуль 302 наблюдения возмущений, задаются на графике Боде таким образом, что резонансная характеристика передаточной характеристики в системе управления частотой вращения, когда момент инерции системы передачи мощности равен инерции электромотора, становится равной или меньше частоты пульсации двигателя на низкой предельной рабочей частоте вращения двигателя 2. Следовательно, резонанс компонентов вибрации вследствие пульсации крутящего момента и т.п. может исключаться на частоте вращения на холостом ходу или выше, так что можно исключать формирование дребезжащего шума в нормальном рабочем диапазоне двигателя.
[0078] Хотя выше описывается вариант осуществления настоящего изобретения, вышеописанный вариант осуществления показывает только часть примеров вариантов применения настоящего изобретения и не имеет намерение ограничивать объем настоящего изобретения конкретными конфигурациями вышеописанного варианта осуществления.
Реферат
Изобретение относится к гибридным транспортным средствам. Способ управления электрогенератором гибридного транспортного средства содержит этап вычисления крутящего момента для управления частотой вращения электрогенератора и этап управления электрогенератором. На этапе вычисления крутящего момента для управления частотой вращения вычисляют базовое значение команды управления крутящим моментом, приводящее к тому, что отклик крутящего момента электрогенератора совпадает с предварительно установленным откликом модели. Затем вычисляют возмущающий крутящий момент, который вводится в систему передачи мощности, и вычисляют значение команды управления крутящим моментом, на основе базового значения команды управления крутящим моментом и возмущающего крутящего момента. Относительная степень фильтра модуля наблюдения возмущений задается так, что относительная степень передаточной функции становится 1 или более. Снижается уровень шума. 2 н. и 2 з.п. ф-лы, 7 ил.
Комментарии