Автомобильное устройство управления торможением и способ управления таким устройством - RU2434768C2
Код документа: RU2434768C2
Чертежи





Описание
Область техники
Изобретение в целом относится к автомобильному устройству управления торможением и способу управления автомобильным устройством управления торможением, а точнее говоря к автомобильному устройству управления торможением и способу управления автомобильным устройством управления торможением, которое управляет регенеративной тормозной системой и фрикционной тормозной системой на основе величины, на которую исполнительный орган приведен в действие водителем.
Уровень техники
В последние годы предложено гибридное транспортное средство, включающее в себя двигатель внутреннего сгорания, который вырабатывает крутящий момент путем сжигания в нем топлива, и электродвигатель, который вырабатывает крутящий момент с использованием поступающей в него электрической энергии. Гибридное транспортное средство перемещается с использованием крутящего момента, передаваемого от двигателя и/или электродвигателя к колесам. В таком гибридном транспортном средстве то, приводится ли в действие электродвигатель или он остановлен, управляется в зависимости от условий движения. Таким образом, использовать ли только крутящий момент от электродвигателя или крутящий момент одновременно от двигателя и электродвигателя для приведения в движение колес, определяется в зависимости от условий движения. Электродвигатель управляется с помощью электрической энергии, запасенной в аккумуляторе. Когда энергия в аккумуляторе исчерпывается, приводится в движение двигатель для зарядки аккумулятора. Кроме того, в таком гибридном транспортном средстве применяется регенеративная тормозная система. С помощью регенеративной тормозной системы, когда выполняется торможение в ответ на нажатие на ножной тормоз, кинетическая энергия транспортного средства преобразуется в электрическую энергию в результате работы электродвигателя в качестве генератора, и электрическая энергия восстанавливается в аккумуляторе для повторного использования (см., например, публикацию заявки на патент Японии № 08-33114 (JP-A-08-33114)).
Фиг. 7 представляет собой график, показывающий тормозную силу, созданную гидравлической тормозной системой, и регенеративную тормозную силу, созданную электродвигателем во время торможения, выполненного в ответ на выжим ножного тормоза гибридного транспортного средства, в соответствии с технологией предшествующего уровня техники. На фиг. 7 заштрихованная область представляет регенеративную тормозную силу, созданную электродвигателем, а остальная область представляет тормозную силу, созданную гидравлической тормозной системой.
Как показано на фиг. 7, если необходима большая тормозная сила, используются и регенеративная тормозная сила, созданная электродвигателем, и тормозная сила, созданная гидравлической тормозной системой. С другой стороны, если необходима только небольшая тормозная сила, то регенеративная тормозная сила, созданная электродвигателем, используется в большей части рабочей области и замещается тормозной силой, созданной гидравлической тормозной системой, незадолго до остановки транспортного средства (например, между приблизительно 13 км/ч и приблизительно 7 км/ч).
Могут возникать следующие проблемы с 1) по 3), так как регенеративная тормозная сила замещается тормозной силой, созданной гидравлической тормозной системой незадолго до остановки транспортного средства, как описано выше. 1. На участке, помеченном "а" на фиг. 7, хотя может быть доступна регенерация энергии, регенеративное торможение прекращается, что препятствует повышению топливной экономичности. 2. Реакция на управляющее воздействие отличается между электродвигателем и гидравлической тормозной системой и, как правило, гидравлическая тормозная система медленнее по реакции на управляющее воздействие, чем электродвигатель, что может вызвать колебания в перегрузках. 3. Гидравлическое давление, когда регенеративная тормозная сила замещается гидравлической тормозной силой, задается на основе коэффициента μ трения тормозной колодки, который сильно меняется. Поэтому сложно применить подходящее гидравлическое давление. В результате перегрузки могут колебаться из-за изменения коэффициента μ трения тормозной колодки.
Кроме того, некоторые гибридные транспортные средства в соответствии с технологиями предшествующего уровня включают в себя систему, в которой электронный блок управления гибридного транспортного средства (ЭБУ-ГТС), который управляет системой привода, и электронный блок управления (ЭБУ) тормозов, который управляет тормозной системой, подключаются друг к другу, например, посредством сети контроллеров (CAN). Реакция на управляющее воздействие медленнее в передаче данных по CAN, применяемой в этой системе, чем в последовательной передаче данных. Когда ЭБУ тормозов конфигурируется для определения, останавливать ли регенеративное торможение, и выводит команду остановки регенерации в ЭБУ-ГТС, если определяется, что регенеративное торможение следует остановить, ЭБУ-ГТС принимает команду остановки регенерации, которая передается от ЭБУ тормозов посредством передачи данных по CAN, а затем выводит команду остановки регенерации в ЭБУ двигателя. Поэтому существует запаздывание между тем, когда ЭБУ тормозов определяет, что транспортное средство останавливается, и тем, когда ЭБУ-ГТС выводит команду остановки регенерации в ЭБУ двигателя. Однако, если ЭБУ тормозов выводит команду остановки регенерации в ЭБУ-ГТС непосредственно перед остановкой транспортного средства (или одновременно с тем, когда останавливается транспортное средство), чтобы регенерировать как можно больше энергии, то существует вероятность того, что выработка регенеративного крутящего момента (отрицательного крутящего момента) будет продолжаться даже после остановки транспортного средства, что может вызвать непреднамеренный задний ход транспортного средства.
Краткое описание изобретения
Согласно изобретению разработаны автомобильное устройство управления торможением и способ управления автомобильным устройством управления торможением, которое управляет регенеративной тормозной системой и фрикционной тормозной системой, в котором блок управления системой привода принимает сигнал, указывающий целевую регенеративную тормозную силу, от блока управления тормозной системой и управляет регенеративной тормозной системой, причем автомобильное устройство управления торможением позволяет регенерировать наибольшую возможную энергию, не вызывая непреднамеренного заднего хода транспортного средства, путем предотвращения медленной реакции на управляющее воздействие из-за передачи данных, которая, вероятно, возникает, когда останавливается регенеративная тормозная система.
Первый аспект изобретения относится к автомобильному устройству управления торможением, которое управляет регенеративной тормозной системой и фрикционной тормозной системой на основе величины, на которую исполнительный орган приведен в действие водителем, чтобы затормозить. Автомобильное устройство управления торможением включает в себя блок управления тормозной системой, который управляет тормозной системой, и блок управления системой привода, который управляет системой привода. Блок управления тормозной системой включает в себя блок вычисления целевой тормозной силы, который задает целевую тормозную силу на основе величины, на которую исполнительный орган приведен в действие водителем, и блок вычисления распределения регенеративной тормозной силы/фрикционной тормозной силы, который распределяет целевую тормозную силу между целевой регенеративной тормозной силой и целевой фрикционной тормозной силой на основе условий движения транспортного средства и выводит сигнал, указывающий распределенную целевую регенеративную тормозную силу, в блок управления системой привода. Блок управления системой привода включает в себя блок управления регенеративным торможением, который управляет регенеративной тормозной системой на основе целевой регенеративной тормозной силы, указанной сигналом, принятым от блока управления тормозной системой, блок определения момента остановки регенерации, который определяет момент остановки регенерации на основе условий движения транспортного средства, и блок останова регенеративного торможения, который останавливает регенеративную тормозную систему.
В первом аспекте изобретения блок определения момента остановки регенерации может определить, что достигнут момент остановки регенерации, когда частота вращения электродвигателя равна или ниже заранее установленного значения.
В первом аспекте изобретения блок останова регенеративного торможения может остановить регенеративную тормозную систему, когда блок определения момента остановки регенерации определяет, что достигнут момент остановки регенерации.
В первом аспекте изобретения блок управления тормозной системой и блок управления системой привода могут быть подключены к автомобильной локальной вычислительной сети (LAN) и выполнять передачу данных с использованием автомобильной LAN.
Второй аспект изобретения относится к способу управления автомобильным устройством управления торможением, которое управляет регенеративной тормозной системой и фрикционной тормозной системой на основе величины, на которую исполнительный орган приведен в действие водителем, чтобы затормозить. Автомобильное устройство управления торможением включает в себя блок управления тормозной системой, который управляет тормозной системой, и блок управления системой привода, который управляет системой привода. В соответствии со способом управления в блоке управления тормозной системой целевая тормозная сила задается на основе величины, на которую исполнительный орган приведен в действие водителем, и целевая тормозная сила распределяется между целевой регенеративной тормозной силой и целевой фрикционной тормозной силой на основе условий движения транспортного средства, и сигнал, указывающий распределенную целевую регенеративную тормозную силу, выводится в блок управления системой привода. Дополнительно в блоке управления системой привода осуществляется управление над регенеративной тормозной системой на основе целевой регенеративной тормозной силы, указанной сигналом, принятым от блока управления тормозной системой, момент остановки регенерации определяется на основе условий движения транспортного средства, и осуществляется управление для остановки регенеративной тормозной системы.
В соответствии с аспектом изобретения, описанным выше, автомобильное устройство управления торможением, которое управляет регенеративной тормозной системой и фрикционной тормозной системой на основе величины, на которую исполнительный орган приведен в действие водителем, чтобы затормозить, включает в себя блок управления тормозной системой, который управляет тормозной системой, и блок управления системой привода, который управляет системой привода. Блок управления тормозной системой включает в себя блок вычисления целевой тормозной силы, который задает целевую тормозную силу на основе величины, на которую исполнительный орган приведен в действие водителем, и блок вычисления распределения регенеративной тормозной силы/фрикционной тормозной силы, который распределяет целевую тормозную силу между целевой регенеративной тормозной силой и целевой фрикционной тормозной силой на основе условий движения транспортного средства и выводит сигнал, указывающий распределенную целевую регенеративную тормозную силу, в блок управления системой привода. Блок управления системой привода включает в себя блок управления регенеративным торможением, который управляет регенеративной тормозной системой на основе целевой регенеративной тормозной силы, указанной сигналом, принятым от блока управления тормозной системой, блок определения момента остановки регенерации, который определяет момент остановки регенерации на основе условий движения транспортного средства, и блок останова регенеративного торможения, который останавливает регенеративную тормозную систему. Поэтому блок управления системой привода определяет подходящий момент остановки регенерации и останавливает регенеративную тормозную систему в подходящий момент. Соответственно, предоставляется автомобильное устройство управления торможением, которое позволяет регенерировать наибольшую возможную энергию, не вызывая непреднамеренного заднего хода транспортного средства путем предотвращения медленной реакции на управляющее воздействие из-за передачи данных, которая, вероятно, возникает, когда останавливается регенеративная тормозная система.
Краткое описание чертежей
Ранее описанные и дополнительные признаки и преимущества изобретения станут очевидными из нижеследующего описания примерного варианта осуществления со ссылкой на прилагаемые чертежи, на которых одинаковые ссылочные позиции используются для обозначения одинаковых элементов и на которых:
Фиг. 1 - вид, схематически иллюстрирующий конструкцию гибридного транспортного средства, включающего в себя автомобильное устройство управления торможением в соответствии с вариантом осуществления изобретения.
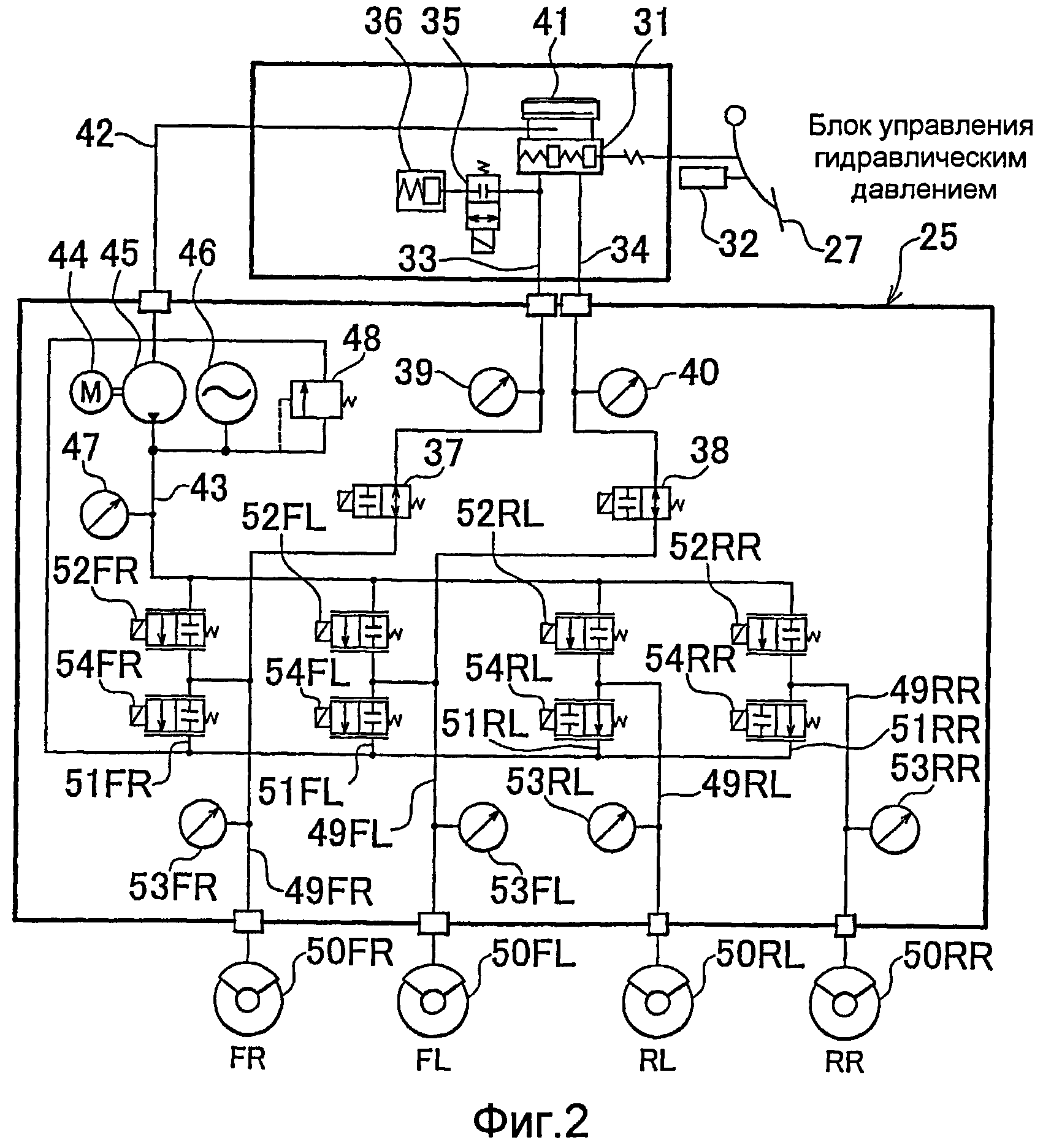
Фиг. 2 - вид, схематически иллюстрирующий структуру гидравлической тормозной системы в автомобильном устройстве управления торможением, в соответствии с вариантом осуществления изобретения.
Фиг. 3 - схематическая блок-схема управления для гидравлического тормоза в соответствии с вариантом осуществления изобретения.
Фиг. 4 - функциональная блок-схема для ЭБУ тормозов и ЭБУ-ГТС.
Фиг. 5 - блок-схема алгоритма, иллюстрирующая программу управления, выполняемую ЭБУ-ГТС во время торможения.
Фиг. 6 - график, показывающий тормозную силу, созданную гидравлической тормозной системой, и регенеративную тормозную силу, созданную электродвигателем во время торможения, выполненного в ответ на выжим ножного тормоза гибридного транспортного средства, в соответствии с вариантом осуществления изобретения.
Фиг. 7 - график, показывающий тормозную силу, созданную гидравлической тормозной системой, и регенеративную тормозную силу, созданную электродвигателем во время торможения, выполненного в ответ на выжим ножного тормоза гибридного транспортного средства, в соответствии с технологией предшествующего уровня.
Подробное описание варианта осуществления изобретения
Автомобильное устройство управления торможением в соответствии с вариантом осуществления изобретения будет подробно описано ниже со ссылкой на прилагаемые чертежи. Отметим, что изобретение не ограничивается этим вариантом осуществления. Кроме того, элементы в нижеследующем варианте осуществления включают в себя элементы, которые могут быть легко представлены специалистом в данной области техники, или элементы, которые практически одинаковы.
Фиг. 1 является видом, схематически иллюстрирующим конструкцию гибридного транспортного средства, включающего в себя автомобильное устройство управления торможением в соответствии с вариантом осуществления изобретения.
Как показано на фиг. 1, гибридное транспортное средство, включающее в себя автомобильное устройство управления торможением в соответствии с вариантом осуществления изобретения, снабжено двигателем 11 внутреннего сгорания и электродвигателем 12 в качестве источников мощности привода (энергии движения). Дополнительно, гибридное транспортное средство снабжено генератором 13, который вырабатывает электрическую энергию, используя мощность привода, поступающую от двигателя 11. Двигатель 11, электродвигатель 12 и генератор 13 подключены друг к другу посредством механизма 14 разветвления мощности. Этот механизм 14 разветвления мощности распределяет мощность привода, выводимую из двигателя 11, между генератором 13 и ведущими колесами 15, передает мощность привода, выводимую из электродвигателя 12, к ведущим колесам 15, и функционирует в качестве передачи, которая изменяет частоту вращения, которая передается через карданный вал 28, редуктор 16 и приводной вал 17 к ведущим колесам 15.
Электродвигатель 12 является синхронным двигателем на переменном токе и приводится в движение энергией переменного тока. Инвертор 18 преобразует энергию постоянного тока, накопленную в аккумуляторе 19, в энергию переменного тока, а затем передает энергию переменного тока электродвигателю 12. Также инвертор 18 преобразует энергию переменного тока, созданного генератором 13, в энергию постоянного тока и передает энергию постоянного тока к аккумулятору 19. Генератор 13 в основном обладает такой же конструкцией, как и у электродвигателя 12, и поэтому построен как синхронный двигатель на переменном токе. В этом случае электродвигатель 12 в основном функционирует в качестве двигателя, который вырабатывает мощность привода, а генератор 13 в основном функционирует в качестве генератора, который создает электрическую энергию, используя мощность привода, поступающую от двигателя 11.
Хотя электродвигатель 12 в основном функционирует в качестве двигателя, который вырабатывает мощность привода, он может функционировать в качестве генератора, который создает электрическую энергию, используя вращение ведущих колес 15 (электрическая регенерация). В то же время регенеративная тормозная сила прикладывается к ведущим колесам 15. С использованием регенеративной тормозной силы вместе с тормозной силой, созданной в ответ на выжим ножного тормоза, и тормозной силой, развиваемой двигателем, транспортное средство может быть замедлено или остановлено. С другой стороны, хотя генератор 13 в основном функционирует в качестве генератора, который создает электрическую энергию с использованием мощности привода, выводимой из двигателя 11, он может функционировать в качестве электродвигателя, который приводится в движение с использованием электрической энергии, поступающей из аккумулятора 19 через инвертор 18.
Двигатель 11 снабжается датчиком положения коленвала (не показан), который определяет положение поршня и частоту вращения двигателя и который передает ЭБУ 20 двигателя сигналы, указывающие результаты измерения. Кроме того, электродвигатель 12 и генератор 13 снабжаются датчиком 12а частоты вращения и датчиком 13а частоты вращения соответственно, которые определяют частоту вращения и угловое положение и выводят в ЭБУ-ГТС 22 (блок управления системой привода) сигналы, указывающие результаты измерения.
Вышеупомянутые различные проверки в гибридном транспортном средстве выполняются множеством электронных блоков управления (ЭБУ). Сочетание работы с использованием мощности привода от двигателя 11 и работы с использованием мощности привода от электродвигателя 12, которое является характерным для гибридного транспортного средства, полностью управляется ЭБУ-ГТС 22. ЭБУ-ГТС 22 включает в себя центральный процессор ЦП, запоминающее устройство и т.п. и управляет системой привода путем выполнения сохраненной в нем управляющей программы. Последовательное соединение устанавливается между ЭБУ-ГТС 22 и каждым из ЭБУ 20 двигателя, ЭБУ 21 двигателя и ЭБУ 23 аккумулятора, который управляет аккумулятором 19. ЭБУ-ГТС 22 определяет распределение мощности привода, которую нужно вывести, между двигателем 11 и электродвигателем 12 и передает управляющую команду к ЭБУ 20 двигателя, чтобы управлять двигателем 11, и управляющую команду к ЭБУ 21 двигателя, чтобы управлять электродвигателем 12 и генератором 13.
Кроме того, ЭБУ 20 двигателя передает ЭБУ-ГТС 22 информацию касательно двигателя 11 и передает ЭБУ-ГТС 22 информацию касательно электродвигателя 12 и генератора 13. ЭБУ 23 аккумулятора отслеживает состояние заряда (СЗ) аккумулятора 19 и выводит команду запроса заряда в ЭБУ-ГТС 22, если СЗ недостаточное. При приеме команды запроса заряда ЭБУ-ГТС 22 осуществляет управление, чтобы заставить генератор 13 создать электрическую энергию, чтобы зарядить аккумулятор 19.
Кроме того, транспортное средство снабжается гидравлическими тормозами 24 (фрикционными тормозами), которые соответствуют соответствующим ведущим колесам 15. Каждый из гидравлических тормозов 24 обеспечивается заданным гидравлическим давлением торможения, которое устанавливается блоком 25 управления гидравлическим давлением. ЭБУ-ГТС 22 подключается через CAN (автомобильную LAN) к ЭБУ 26 тормозов (блок управления тормозной системой), который управляет блоком 25 управления гидравлическим давлением. ЭБУ 26 тормозов задает целевую тормозную силу в зависимости от величины, на которую приведена в действие тормозная педаль 27, и передает ЭБУ-ГТС 22 сигнал, указывающий целевую регенеративную тормозную силу. ЭБУ-ГТС 22 передает ЭБУ 21 двигателя сигнал, указывающий целевую регенеративную тормозную силу, и ЭБУ 21 двигателя управляет регенеративной тормозной системой и передает ЭБУ-ГТС 22 сигнал, указывающий результирующее значение, другими словами сигнал, указывающий фактически созданную регенеративную тормозную силу. ЭБУ 26 тормозов вычитает фактически созданную регенеративную тормозную силу из целевой тормозной силы, чтобы определить целевую гидравлическую тормозную силу, и управляет гидравлическими тормозами 24 на основе этой целевой гидравлической тормозной силы.
Конструкция гидравлических тормозов 24 в автомобильном устройстве управления торможением, в соответствии с вариантом осуществления изобретения, будет подробно описываться ниже при условии, что автомобильное устройство управления торможением устанавливается в гибридное транспортное средство, имеющее вышеупомянутую конструкцию. Фиг. 2 является видом, схематически иллюстрирующим структуру гидравлической тормозной системы в автомобильном устройстве управления торможением, в соответствии с вариантом осуществления изобретения. Фиг. 3 является схематической блок-схемой управления для гидравлического тормоза 24 в соответствии с вариантом осуществления изобретения.
Гидравлические тормоза 24 в автомобильном устройстве управления торможением, в соответствии с вариантом осуществления изобретения, применяются к тормозной системе с электронным управлением, которая способна электронно выполнять управление с помощью антиблокировочной тормозной системы (ABS) для предотвращения блокировки ведущих колес 15 и управление с помощью электронного распределения тормозных усилий (EBD) для регулировки распределения тормозных сил между ведущими колесами 15. Тормозная система с электронным управлением способна выполнять обычное управление торможением для приложения тормозной силы к каждому из ведущих колес 15 на основе действующей силы, прилагаемой водителем, без выполнения управления с помощью EBD и управления с помощью ABS. Тормозная система с электронным управлением может быть сконфигурирована для выполнения только одного из управления с помощью EBD и управления с помощью ABS, или для невыполнения ни управления с помощью EBD, ни управления с помощью ABS.
Как показано на фиг. 2 и фиг. 3, главный цилиндр 31, который нагнетает давление в гидравлической жидкости в ответ на работу тормозной педали 27, выполняемую водителем, подключается к тормозной педали 27, и датчик 32 хода педали, который определяет величину, на которую выжата тормозная педаль 27, то есть ход педали, подключается к тормозной педали 27.
Два подающих гидравлическое давление трубопровода 33 и 34 подключаются к главному цилиндру 31. Имитатор 36 хода подключается к подающему гидравлическое давление трубопроводу 33 посредством обычно открытого запорного клапана 35 имитатора. Имитатор 36 хода формирует ход педали, соответствующий действующей силе, приложенной водителем к тормозной педали 27. Подающие гидравлическое давление трубопроводы 33 и 34 снабжаются обычно закрытыми главными запорными клапанами 37 и 38, соответственно. Подающие гидравлическое давление трубопроводы 33 и 34 также снабжаются датчиками 39 и 40 давления в главном цилиндре, которые определяют гидравлические давления в подающих гидравлическое давление трубопроводах 33 и 34, соответственно. Датчики 39 и 40 давления в главном цилиндре устанавливаются выше главных запорных клапанов 37 и 38 (то есть размещаются в положениях, близких к главному цилиндру 31).
Трубопровод 42 сброса гидравлического давления подключается к бачку 41 для главного цилиндра 31. Гидравлический насос 45, который приводится в движение двигателем 44 насоса, предоставляется в средней части подающего гидравлическое давление трубопровода 43, который ответвляется от трубопровода 42 сброса гидравлического давления, и накопитель 46, который накапливает гидравлическое давление, которое поднимается путем приведения в движение гидравлического насоса 45, подключается к подающему гидравлическое давление трубопроводу 43. Кроме того, датчик 47 давления в аккумуляторе, который определяет давление внутри накопителя 46, подключается к средней части подающего гидравлическое давление трубопровода 43. К тому же, предохранительный клапан 48 предусматривается между подающим гидравлическое давление трубопроводом 43 и трубопроводом 42 сброса гидравлического давления. Предохранительный клапан 48 возвращает накопленную гидравлическую жидкость в бачок 41, когда гидравлическое давление в подающем гидравлическое давление трубопроводе 43 становится чрезмерно высоким.
Подающий гидравлическое давление трубопровод 43 разветвляется на четыре подающих гидравлическое давление патрубка 49FR, 49FL, 49RL и 49RR, которые подключаются к колесным тормозным цилиндрам 50FR, 50FL, 50RL и 50RR соответственно, которые приводят в движение гидравлические тормоза 24 (см. фиг. 1), предусмотренные для соответствующих ведущих колес 15. Аналогичным образом, трубопровод 42 сброса гидравлического давления разветвляется на четыре патрубка 51FR, 51FL, 51RL и 51RR сброса гидравлического давления, которые подключаются к колесным тормозным цилиндрам 50FR, 50FL, 50RL и 50RR, соответственно.
Повышающие давление клапаны 52 с электромагнитным управлением (52FR, 52FL, 52RL и 52RR) предусматриваются в положениях (положениях на стороне гидравлического насоса 45) выше средних частей подающих гидравлическое давление патрубков 49FR, 49FL, 49RL и 49RR, к которым соответственно подключаются патрубки 51FR, 51FL, 51RL и 51RR сброса гидравлического давления. Датчики 53 давления в колесных цилиндрах (53FR, 53FL, 53RL и 53RR), которые определяют гидравлические давления, подаваемые к колесным тормозным цилиндрам 50FR, 50FL, 50RL и 50RR, предусматриваются в положениях (положениях на стороне колесного тормозного цилиндра 50FR, 50FL, 50RL и 50RR) ниже средних частей подающих гидравлическое давление патрубков 49FR, 49FL, 49RL и 49RR, к которым соответственно подключаются патрубки 51FR, 51FL, 51RL и 51RR сброса гидравлического давления. Кроме того, понижающие давление клапаны 54 с электромагнитным управлением (54FR, 54FL, 54RL и 54RR) предусматриваются в положениях (положениях на стороне бачка 41) ниже средних частей патрубков 51FR, 51FL, 51RL и 51RR сброса гидравлического давления, к которым соответственно подключаются подающие гидравлическое давление патрубки 49FR, 49FL, 49RL и 49RR.
Кроме того, подающие гидравлическое давление патрубки 49FR, 49FL, 49RL и 49RR подключаются через главные запорные клапаны 37 и 38 к подающим гидравлическое давление трубопроводам 33 и 34 в положениях ниже повышающих давление клапанов 52FR, 52FL, 52RL и 52RR с электромагнитным управлением соответственно. Таким образом, главный цилиндр 31 подключается к колесным тормозным цилиндрам 50FR, 50FL, 50RL и 50RR через главные запорные клапаны 37 и 38. Кроме того, четыре ведущих колеса 15 оборудуются датчиками 55 скорости вращения колеса, которые определяют частоту вращения соответствующих ведущих колес.
ЭБУ 26 тормозов включает в себя ЦП, запоминающее устройство и т.п. и выполняет управление торможением путем выполнения сохраненной в нем программы управления торможением. Точнее говоря, сигналы, указывающие гидравлические давления, определенные датчиками 39 и 40 давления в главном цилиндре, гидравлическое давление, определенное датчиком 47 давления в аккумуляторе, и гидравлические давления, определенные датчиками 53 давления в колесных цилиндрах (53FR, 53FL, 53RL и 53RR), вводятся в ЭБУ 26 тормозов. Кроме того, сигналы, указывающие ход педали, определенный датчиком 32 хода педали, и скорости колес, определенные датчиками 55 скорости вращения колеса, вводятся в ЭБУ 26 тормозов. Затем ЭБУ 26 тормозов управляет запорным клапаном 35 имитатора, главными запорными клапанами 37 и 38, повышающими давление клапанами 52 с электромагнитным управлением (52FR, 52FL, 52RL и 52RR), понижающими давление клапанами 54 с электромагнитным управлением (54FR, 54FL, 54RL и 54RR), двигателем 44 насоса и предохранительным клапаном 48.
Поэтому главные запорные клапаны 37 и 38 обычно закрыты, а запорный клапан 35 имитатора обычно открыт, и главный цилиндр 31 создает гидравлическое давление, соответствующее величине работы тормозной педали 27, когда водитель выжимает тормозную педаль 27. Между тем, поскольку часть гидравлической жидкости течет от подающего гидравлическое давление трубопровода 33 через запорный клапан 35 имитатора, имитатор 36 хода, величина работы тормозной педали 27 регулируется на основе усилия выжима, приложенного к тормозной педали 27. То есть достигается величина работы педали (ход педали), соответствующая усилию выжима. Ход педали определяется датчиком 32 хода педали. В качестве альтернативы ход педали может вычисляться на основе гидравлических давлений, определенных датчиками 39 и 40 давления в главном цилиндре. Если определенный ход педали не совпадает с вычисленным ходом педали, то определяется, что по меньшей мере один из датчиков 32, 39 и 40 главного цилиндра 31 и подающих гидравлическое давление трубопроводов 33 и 34 является работающим неправильно.
ЭБУ 26 тормозов задает целевую гидравлическую тормозную силу на основе определенного хода педали и регенеративной тормозной силы, определяет целевые гидравлические тормозные силы, которые распределяются на соответствующие ведущие колеса 15, и задает целевые гидравлические давления, которые подаются на соответствующие колесные тормозные цилиндры 50FR, 50FL, 50RL и 50RR. В то же время заранее установленное гидравлическое давление накапливается в накопителе 46. Однако если гидравлическое давление, определенное датчиком 47 давления в аккумуляторе, ниже заданного нижнего предела гидравлического давления, то давление повышается путем приведения в движение двигателя 44 насоса, чтобы запустить гидравлический насос 45. С другой стороны, если гидравлическое давление слишком превышает заданный верхний предел гидравлического давления, то предохранительный клапан 48 открывается для сброса гидравлической жидкости в бачок 41.
ЭБУ 26 тормозов открывает и закрывает повышающие давление клапаны 52 с электромагнитным управлением (52FR, 52FL, 52RL и 52RR) и понижающие давление клапаны 54 с электромагнитным управлением (54FR, 54FL, 54RL и 54RR) на основе установленных целевых гидравлических давлений (целевых гидравлических тормозных сил) и подает заранее установленные гидравлические давления на соответствующие колесные тормозные цилиндры 50FR, 50FL, 50RL и 50RR. Другими словами, гидравлические давления, которые подаются на соответствующие колесные тормозные цилиндры 50FR, 50FL, 50RL и 50RR, регулируются путем изменения степеней открытия повышающих давление клапанов 52 с электромагнитным управлением (52FR, 52FL, 52RL и 52RR) и понижающих давление клапанов 54 с электромагнитным управлением (54FR, 54FL, 54RL и 54RR). Затем ЭБУ 26 тормозов получает давления в колесных тормозных цилиндрах, определенные датчиками давления в колесных цилиндрах, сравнивает эти давления в колесных тормозных цилиндрах с целевыми гидравлическими давлениями и регулирует степени открытия клапанов 52 и 54 на основе результатов сравнения.
Например, в случае колесного тормозного цилиндра 50FL ЭБУ 26 тормозов сравнивает давление в колесном тормозном цилиндре, определенное датчиком 53FL давления в колесном цилиндре, с целевым гидравлическим давлением. Если необходимо дополнительное давление, то ЭБУ 26 тормозов открывает повышающий давление клапан 52FL при закрытом понижающем давление клапане 54FL. Таким образом, гидравлическая жидкость в накопитель 46 поступает в колесный тормозной цилиндр 50FL через подающий гидравлическое давление трубопровод 43, повышающий давление клапан 52FL и подающий гидравлическое давление патрубок 49FL. В результате повышается гидравлическое давление в колесном тормозном цилиндре 50FL и увеличивается тормозная сила. С другой стороны, если тормозная сила очень большая и ведущие колеса 15 блокируются (в управлении с помощью ABS), либо если давление в колесном тормозном цилиндре, определенное датчиком 53FL давления в колесном цилиндре, выше целевого гидравлического давления, то ЭБУ 26 тормозов определяет, что гидравлическое давление следует понизить, и открывает понижающий давление клапан 54FL при закрытом повышающем давление клапане 52FL. Таким образом, часть гидравлической жидкости, которая поступила в колесный тормозной цилиндр 50FL, возвращает в бачок 41 через понижающий давление клапан 54FL, патрубок 51FL сброса гидравлического давления и трубопровода 42 сброса гидравлического давления. В результате снижается гидравлическое давление, примененное к колесному тормозному цилиндру 50FL, и уменьшается тормозная сила. Если давление в колесном тормозном цилиндре, определенное датчиком 53FL давления в колесном цилиндре, после повышения или понижения гидравлического давления в основном совпадает с целевым гидравлическим давлением, то ЭБУ 26 тормозов определяет, что давление в колесном тормозном цилиндре нужно сохранить, и закрывает как повышающий давление клапан 52FL, так и понижающий давление клапан 54FL. В результате останавливается поток гидравлической жидкости через подающий гидравлическое давление трубопровод 49FL в участке на стороне колесного тормозного цилиндра 50FL относительно повышающего давление клапана 52FL и понижающего давление клапана 54FL, и сохраняется гидравлическое давление, которое подается к колесному тормозному цилиндру 50FL.
Если возникает неисправность в блоке 25 управления гидравлическим давлением в тормозной системе с электронным управлением, включающей в себя эту гидравлическую тормозную систему, то подходящее распределение тормозной силы невозможно. Поэтому, если обнаруживается неисправность в блоке 25 управления гидравлическим давлением, то ЭБУ 26 тормозов открывает главные запорные клапаны 39 и 40 и закрывает запорный клапан 35 имитатора, посредством этого напрямую вводя гидравлическое давление, созданное главным цилиндром 31, в колесные тормозные цилиндры 50FR, 50FL, 50RL и 50RR через подающие гидравлическое давление трубопроводы 33 и 34. Таким образом, обеспечивается торможение.
Фиг. 4 является функциональной блок-схемой для ЭБУ 26 тормозов и ЭБУ-ГТС 22, и используется для описания проверок, выполняемых ЭБУ-ГТС 22 и ЭБУ 26 тормозов во время торможения. Фиг. 5 является блок-схемой алгоритма, иллюстрирующая программу управления, выполняемую ЭБУ-ГТС во время торможения. Фиг. 6 является графиком, показывающим тормозную силу, созданную гидравлической тормозной системой, и регенеративную тормозную силу, созданную электродвигателем во время торможения, выполненного в ответ на выжим ножного тормоза гибридного транспортного средства, в соответствии с вариантом осуществления изобретения. На фиг. 6 заштрихованная область представляет регенеративную тормозную силу, созданную электродвигателем 12, а остальная область представляет тормозную силу, созданную гидравлической тормозной системой.
Как описано в описании предшествующего уровня техники, в гибридном транспортном средстве, в соответствии с технологией предшествующего уровня, ЭБУ-ГТС 22 и ЭБУ 26 тормозов подключаются друг к другу посредством CAN. Поэтому реакция на управляющее воздействие медленнее в передаче данных по CAN, чем в последовательной передаче данных. Соответственно, когда ЭБУ 26 тормозов конфигурируется для определения, останавливается ли транспортное средство, и вывода команды остановки регенерации в ЭБУ-ГТС 22, если определяется, что транспортное средство останавливается, ЭБУ-ГТС 22 принимает команду остановки регенерации, переданную от ЭБУ 26 тормозов с помощью передачи данных по CAN, а затем передает команду остановки регенерации в ЭБУ 21 двигателя. Поэтому существует запаздывание между тем, когда ЭБУ 26 тормозов определяет, что транспортное средство останавливается, и тем, когда ЭБУ-ГТС 22 выводит команду остановки регенерации в ЭБУ 21 двигателя. Соответственно, существует вероятность, что выработка регенеративного крутящего момента (отрицательного крутящего момента) будет продолжаться даже после остановки транспортного средства, что может вызвать непреднамеренный задний ход транспортного средства. Поэтому, в соответствии с вариантом осуществления изобретения, подходящий момент для прекращения регенеративного торможения определяется с помощью ЭБУ-ГТС 22, и команда остановки регенерации выводится в ЭБУ 21 двигателя. Таким образом, предупреждается медленная реакция на управляющее воздействие для прекращения регенеративного торможения из-за передачи данных по CAN, и наибольшая возможная энергия регенерируется, не вызывая задний ход транспортного средства.
Как показано на фиг. 4, ЦП в ЭБУ-ГТС 22 выполняет управляющие программы, при помощи которых ЭБУ-ГТС 22 функционирует в качестве блока 111 управления регенеративным торможением, который управляет регенеративной тормозной системой на основе целевой регенеративной тормозной силы, указанной сигналом, принятым от ЭБУ 26 тормозов, блока 112 определения момента остановки регенерации, который определяет подходящий момент остановки регенерации для прекращения регенеративного торможения на основе условий движения транспортного средства, и блока 113 останова регенеративного торможения, который прекращает регенеративное торможение, когда определяется, что достигнут момент остановки регенерации, определенный блоком 112 определения момента остановки регенерации.
Также ЦП в ЭБУ 26 тормозов выполняет программы управления торможением, при помощи которых ЭБУ 26 тормозов функционирует в качестве блока 101 вычисления целевой тормозной силы, который задает целевую тормозную силу на основе величины работы педали (хода педали), которая поступает от тормозной педали 27, приводимой в действие водителем, чтобы замедлить или остановить транспортное средство, блока 102 вычисления распределения регенеративной тормозной силы/гидравлической (фрикционной) тормозной силы, который распределяет целевую тормозную силу между целевой регенеративной тормозной силой и целевой гидравлической (фрикционной) тормозной силой на основе условий движения транспортного средства и выводит в ЭБУ-ГТС 22 сигнал, указывающий распределенную целевую регенеративную тормозную силу, и блока 103 управления гидравлическим торможением, который управляет гидравлической тормозной системой на основе целевой гидравлической тормозной силы.
Проверки, выполняемые ЭБУ-ГТС 22 и ЭБУ 26 тормозов во время торможения, будут описываться со ссылкой на фиг. 4 и 5. Как показано на фиг. 4, сначала блок 101 вычисления целевой тормозной силы в ЭБУ 26 тормозов вычисляет целевую тормозную силу на основе величины работы педали (хода педали), которая поступает от тормозной педали 27. Блок 102 вычисления распределения регенеративной тормозной силы/гидравлической тормозной силы вычисляет распределение целевой тормозной силы между целевой регенеративной тормозной силой и целевой гидравлической тормозной силой и выводит в ЭБУ-ГТС 22 сигнал, указывающий целевую регенеративную тормозную силу (значение X (Nm) команды регенерации).
В ЭБУ-ГТС 22 блок 111 управления регенеративным торможением принимает от ЭБУ 26 тормозов сигнал, указывающий целевую регенеративную тормозную силу (значение X (Nm) команды регенерации), и выводит этот сигнал, указывающий целевую регенеративную тормозную силу (значение X (Nm) команды регенерации), в ЭБУ 21 двигателя.
ЭБУ 21 двигателя имеет карту, которая указывает максимальную регенеративную тормозную силу по отношению к скорости транспортного средства, и в соответствии с этой картой задает формируемую регенеративную тормозную силу на основе целевой регенеративной тормозной силы, указанной сигналом от ЭБУ-ГТС. ЭБУ 21 двигателя управляет электродвигателем 12 на основе целевой регенеративной тормозной силы, указанной сигналом от ЭБУ-ГТС 22, чтобы заставить электродвигатель работать в качестве генератора, используя вращение ведущих колес 15, посредством этого преобразуя кинетическую (вращательную) энергию в электрическую энергию, которая накапливается в аккумуляторе 19 после пропускания через инвертор 18, наряду с применением регенеративной тормозной силы для замедления транспортного средства. ЭБУ 21 двигателя передает к ЭБУ-ГТС 22 сигнал, указывающий результирующее значение, другими словами, сигнал, указывающий регенеративную тормозную силу, фактически созданную в результате работы регенеративной тормозной системы с использованием электродвигателя 12 на основе целевой регенеративной тормозной силы.
Блок 111 управления регенеративным торможением в ЭБУ-ГТС 22 передает принятый от ЭБУ 21 двигателя сигнал, указывающий фактически созданную регенеративную тормозную силу, к ЭБУ 26 тормозов. Блок 102 вычисления распределения регенеративной тормозной силы/гидравлической тормозной силы в ЭБУ 26 тормозов вычитает результирующее значение, указанное принятым от ЭБУ-ГТС 22 сигналом, другими словами, фактически созданную регенеративную тормозную силу, из целевой тормозной силы, чтобы задать целевую гидравлическую тормозную силу. Устройство 103 управления гидравлическим тормозом задает целевые гидравлические давления, которые нужно применить к соответствующим колесным тормозным цилиндрам 50FR, 50FL, 50RL и 50RR, на основе целевой гидравлической тормозной силы, регулирует степени открытия повышающих давление клапанов 52 с электромагнитным управлением (52FR, 52FL, 52RL и 52RR) и понижающих давление клапанов 54 с электромагнитным управлением (54FR, 54FL, 54RL и 54RR) на основе целевых гидравлических давлений, и замедляет транспортное средство путем управления гидравлическими тормозами 24 с использованием колесных тормозных цилиндров 50FR, 50FL, 50RL и 50RR.
Кроме того, в соответствии с вариантом осуществления изобретения, который показан на фиг. 5, блок 112 определения момента остановки регенерации в ЭБУ-ГТС 22 определяет, равна или ниже заранее установленного значения (этап S2) частота вращения электродвигателя 12, указанная сигналом, принятым от датчика 12a частоты вращения, во время регенеративного торможения ("ДА" на этапе S1 (в дальнейшем называемом "S")). Если определяется, что частота вращения электродвигателя 12 равна или ниже заранее установленного значения ("ДА" на этапе S2), то блок 112 определения момента остановки регенерации определяет, что достигнут момент, подходящий для прекращения регенеративного торможения. В этом случае, если заранее установленное значение устанавливается в "0", то существует вероятность того, что определяется не точно, остановился ли электродвигатель 12, из-за кручения, которое может возникать в системе привода. Соответственно, предпочтительно установить заранее установленное значение в достаточно малое значение (например, 0,3 км/ч). Если такое достаточно малое значение используется в качестве заранее установленного значения, то не будет возникать изменение в перегрузке, даже если регенеративная тормозная сила замещается тормозной силой, созданной гидравлическими тормозами 24.
Если блок 112 определения момента остановки регенерации определяет, что достигнут подходящий момент для прекращения регенеративного торможения ("ДА" на этапе S2), то блок 113 останова регенеративного торможения в ЭБУ-ГТС 22 выводит команду остановки регенерации (значение "0" команды регенерации) в ЭБУ 21 двигателя (этап S3). Таким образом, прекращается регенеративное торможение.
В соответствии с вариантом осуществления изобретения, ЭБУ-ГТС 22 определяет момент для остановки регенеративного торможения и выводит команду остановки регенерации в ЭБУ 21 двигателя. Соответственно, как показано на фиг. 6, регенеративная тормозная сила доступна непосредственно перед остановкой транспортного средства (x≤1 км/ч). По сравнению с предшествующим уровнем техники, показанным на фиг. 7, величина регенерированной энергии увеличивается, и кинетическая энергия эффективно восстанавливается.
Как описано выше, в соответствии с вариантом осуществления изобретения, ЭБУ 26 тормозов включает в себя блок 101 вычисления целевой тормозной силы, который задает целевую тормозную силу на основе величины работы исполнительного органа, который приводится в действие водителем, чтобы замедлить или остановить транспортное средство, и блок 102 вычисления распределения регенеративной тормозной силы/ гидравлической тормозной силы, который распределяет целевую тормозную силу между целевой регенеративной тормозной силой и целевой гидравлической тормозной силой на основе условий движения транспортного средства и выводит в ЭБУ-ГТС 22 сигнал, указывающий распределенную целевую регенеративную тормозную силу. К тому же ЭБУ-ГТС 22 включает в себя блок 111 управления регенеративным торможением, который управляет регенеративной тормозной системой на основе целевой регенеративной тормозной силы, указанной сигналом, принятым от ЭБУ 26 тормозов, блок 112 определения момента остановки регенерации, который определяет подходящий момент остановки регенерации на основе условий движения транспортного средства, и блок 113 останова регенеративного торможения, который прекращает регенеративное торможение в момент остановки регенерации, определенный блоком 112 определения момента остановки регенерации. Соответственно, ЭБУ-ГТС 22 определяет подходящий момент остановки регенерации и выводит команду остановки регенерации в ЭБУ 21 двигателя. Таким образом, предупреждается медленная реакция на управляющее воздействие для прекращения регенеративного торможения из-за передачи данных по CAN, и наибольшая возможная энергия регенерируется, не вызывая задний ход транспортного средства.
Кроме того, в соответствии с вариантом осуществления изобретения блок 112 определения момента остановки регенерации определяет, что достигнут момент остановки регенерации, когда частота вращения электродвигателя 12 равна или ниже заранее установленного значения. Соответственно, можно точно определить, остановилось ли в основном транспортное средство.
В варианте осуществления изобретения CAN используется в качестве автомобильной LAN. Однако изобретение этим не ограничивается, и LIN, FlexRay или т.п. могут использоваться в качестве автомобильной LAN. К тому же, в варианте осуществления изобретения команда для прекращения регенеративного торможения выдается, когда частота вращения электродвигателя 12 равна или ниже заранее установленного значения. Однако изобретение этим не ограничивается, и команда для прекращения регенеративного торможения может выдаваться, когда частота вращения карданного вала 28 или частота вращения ведущих колес 15 равна или ниже заранее установленного значения.
Промышленная применимость
Автомобильное устройство управления торможением согласно изобретению может применяться к любому типу устройства управления торможением для гибридного транспортного средства.
Реферат
Группа изобретений относится к устройству и способу управления торможением. Автомобильное устройство управления торможением содержит блок управления тормозной системой и блок управления системой привода. Блок управления тормозной системой содержит блок вычисления целевой тормозной силы и блок вычисления распределения регенеративной тормозной силы/фрикционной тормозной силы. Блок управления системой привода содержит блок управления регенеративным торможением, блок определения момента остановки регенерации и блок останова регенеративного торможения. В способе управления указанным устройством блок вычисления целевой тормозной силы задает целевую тормозную силу на основе величины, на которую исполнительный орган приведен в действие водителем. Блок вычисления распределения регенеративной тормозной силы/фрикционной тормозной силы распределяет целевую тормозную силу между целевой регенеративной тормозной силой и целевой фрикционной тормозной силой на основе условий движения транспортного средства и выводит сигнал, указывающий распределенную целевую регенеративную тормозную силу, в блок управления системой привода. Блок управления регенеративным торможением управляет регенеративной тормозной системой на основе целевой регенеративной тормозной силы, указанной сигналом, принятым от блока управления тормозной системой. Блок останова регенеративного торможения останавливает регенеративную тормозную систему, когда блок определения момента остановки регенерации определяет, что достигнут момент остановки регенерации. Достигается повышение топливной экономичности и предотвращение непре�
Комментарии