Устройство вывода мощности, автомобиль, включающий в себя устройство вывода мощности, и модуль и способ управления для устройства вывода мощности - RU2372213C2
Код документа: RU2372213C2
Чертежи







Описание
Область техники
Изобретение относится к устройству вывода мощности, автомобилю, включающему в себя устройство вывода мощности, и модулю и способу управления для устройства вывода мощности.
Предшествующий уровень техники
В опубликованной японской патентной заявке №JP-A-2004-255901 описано устройство вывода мощности, установленное в автомобиле. В устройстве вывода мощности первый мотор, двигатель и выходной вал, подключенный к колесам, соединены с солнечной (центральной) шестерней, опорой и коронной шестерней планетарной передачи, соответственно, и второй мотор соединен с выходным валом через коробку передач, которая включает в себя два тормоза. Когда двигатель описываемого автомобиля запускается, в то время как автомобиль находится на стоянке, двигатель проворачивается первым мотором с помощью крутящего момента реакции, выводимого на выходной вал, в то время как оба тормоза включены для фиксации числа оборотов выходного вала, равными нулю. Таким образом, предотвращается движение автомобиля при запуске двигателя.
Некоторые из таких устройств вывода мощности производят, на основании числа оборотов выходного вала и числа оборотов второго мотора, синхронное определение для плавного переключения передач коробки передач и определение, отсоединены ли друг от друга второй мотор и выходной вал, т.е. отпущены ли оба тормоза коробки передач. Если происходит сбой в датчике, который определяет число оборотов выходного вала, или в датчике, который определяет число оборотов второго мотора, синхронное определение и определение, отсоединены ли друг от друга второй мотор и выходной вал, могут не осуществляться надлежащим образом. В этом случае компоненты коробки передач, например тормоз, могут изнашиваться, поскольку передачи коробки передач не могут переключаться плавно. Число оборотов выходного вала может непредсказуемо изменяться, поскольку двигатель проворачивается первым мотором с помощью крутящего момента реакции, выводимого на выходной вал, в то время как второй мотор и выходной вал отсоединены друг от друга. Число оборотов второго мотора может резко возрастать, поскольку крутящий момент выводится из второго мотора, в то время как второй мотор и выходной вал отсоединены друг от друга. Однако такое неудобство нужно свести к минимуму.
Краткое изложение сущности изобретения
Технической задачей настоящего изобретения является предотвращение износа элементов коробки передач, когда происходит сбой в, по меньшей мере, одном из датчиков - датчике числа оборотов ведущего вала, который определяет число оборотов ведущего вала, и датчике числа оборотов вращающегося вала, который определяет число оборотов вращающегося вала. Изобретение также позволяет предотвратить непредвиденные изменения числа оборотов ведущего вала, когда происходит сбой в, по меньшей мере, одном из датчиков - датчике числа оборотов ведущего вала и датчике числа оборотов вращающегося вала. Кроме того, изобретение позволяет подавить резкое увеличение числа оборотов вращающегося вала, когда происходит сбой в, по меньшей мере, одном из датчиков - датчике числа оборотов ведущего вала и датчике числа оборотов вращающегося вала.
Ниже описаны конфигурации устройства вывода мощности, автомобиля, включающего в себя устройство вывода мощности, модуля и способа управления для управления устройством вывода мощности.
Согласно первому аспекту изобретения предложено устройство вывода мощности, которое выводит мощность на ведущий вал. Устройство вывода мощности содержит двигатель внутреннего сгорания, средство хранения, электромотор, который принимает и выводит мощность и который обменивается электрической мощностью со средством хранения, средство деления мощности, которое подключено к выходному валу двигателя внутреннего сгорания и ведущему валу и которое принимает мощность от выходного вала и выводит мощность на ведущий вал или принимает мощность от ведущего вала и выводит мощность на выходной вал, обмениваясь при этом электрической мощностью со средством хранения и обмениваясь мощностью с двигателем внутреннего сгорания, средство переключения для переноса мощности между вращающимся валом электромотора и ведущим валом с одновременным изменением отношения скоростей на основании числа оборотов вращающегося вала электромотора и числа оборотов ведущего вала, средство определения числа оборотов ведущего вала, средство определения числа оборотов вращающегося вала электромотора, средство задания необходимой мощности привода, необходимой для ведущего вала, и средство управления. При отсутствии сбоя в средстве определения числа оборотов ведущего вала и в средстве определения числа оборотов вращающегося вала средство управления управляет двигателем внутреннего сгорания, средством деления мощности, электромотором и средством переключения, изменяя при этом отношение скоростей в средстве переключения и обеспечивая прерывистую работу двигателя внутреннего сгорания, в результате чего мощность привода, соответствующая необходимой мощности привода, выводится на ведущий вал. Однако, когда происходит сбой в, по меньшей мере, одном из средств определения числа оборотов ведущего вала и средств определения числа оборотов вращающегося вала, средство управления управляет двигателем внутреннего сгорания, средством деления мощности, электромотором и средством переключения, в то же время ограничивая, по меньшей мере, одно из изменения отношения скоростей в средстве переключения, прерывистой работы двигателя внутреннего сгорания и вывода необходимой мощности привода на ведущий вал, в результате чего мощность привода, которая является максимально точным приближением необходимой мощности привода, выводится на ведущий вал.
Благодаря устройству вывода мощности согласно первому аспекту изобретения, при отсутствии сбоя в средстве определения числа оборотов ведущего вала для определения числа оборотов ведущего вала и в средстве определения числа оборотов вращающегося вала для определения числа оборотов вращающегося вала электромотора, осуществляется управление двигателем внутреннего сгорания, средством деления мощности, электромотором и средством переключения, при изменении отношения скоростей в средстве переключения, для переноса мощности между вращающимся валом и ведущим валом с одновременным изменением отношения скоростей на основании числа оборотов вращающегося вала и числа оборотов ведущего вала, и осуществляется прерывистая работа двигателя внутреннего сгорания, в результате чего мощность привода, соответствующая необходимой мощности привода, выводится на ведущий вал. С другой стороны, когда происходит сбой, т.е. когда происходит сбой в, по меньшей мере, одном из средств - средстве определения числа оборотов ведущего вала и средстве определения числа оборотов вращающегося вала, осуществляется управление двигателем внутреннего сгорания, средством деления мощности, электромотором и средством переключения, при этом ограничивается, по меньшей мере, одно из изменения отношения скоростей в средстве переключения, прерывистой работы двигателя внутреннего сгорания и вывода необходимой мощности привода на ведущий вал, в результате чего мощность привода, которая является максимально точным приближением необходимой мощности привода, выводится на ведущий вал. В частности, когда происходит сбой, ограничивается, по меньшей мере, одно из изменения отношения скоростей в средстве переключения, прерывистой работы двигателя внутреннего сгорания и вывода необходимой мощности привода на ведущий вал. Таким образом, можно подавлять износ элементов средства переключения и непредвиденные изменения числа оборотов ведущего вала, когда происходит сбой. Кроме того, даже когда происходит сбой, мощность привода, которая является максимально точным приближением необходимой мощности привода, выводится на ведущий вал.
В устройстве вывода мощности согласно первому аспекту изобретения, когда происходит сбой в средстве определения числа оборотов ведущего вала, и средство определения числа оборотов ведущего вала не может правильно определять число оборотов ведущего вала, средство управления может определить, что произошел сбой, и осуществлять управление.
В устройстве вывода мощности согласно первому аспекту изобретения, когда происходит сбой, средство управления может осуществлять управление так, чтобы отношение скоростей в средстве переключения не изменялось. Таким образом, можно подавлять износ элементов средства переключения, обусловленный изменением отношения скоростей, когда синхронное определение для плавного изменения отношения скоростей в средстве переключения не может осуществляться надлежащим образом.
В устройстве вывода мощности согласно первому аспекту изобретения, когда происходит сбой, средство управления может осуществлять управление так, чтобы прерывистая работа двигателя внутреннего сгорания не осуществлялась. Средство переключения может иметь возможность изменять отношение скоростей и отсоединять вращающийся вал электромотора и ведущий вал друг от друга, изменяя состояния сцепления/расцепления множественных элементов сцепления, и включать в себя средство обнаружения разъединения для определения, отсоединены ли друг от друга вращающийся вал электромотора и ведущий вал, на основании числа оборотов вращающегося вала, определенных средством определения числа оборотов вращающегося вала, и числа оборотов ведущего вала, определенных средством определения числа оборотов ведущего вала. Средство деления мощности может приводить в действие двигатель внутреннего сгорания, выводя силу реакции на ведущий вал. В этом случае, когда происходит сбой, определение, отсоединены ли друг от друга вращающийся вал электромотора и ведущий вал, не может осуществляться надлежащим образом на основании числа оборотов вращающегося вала и числа оборотов ведущего вала. Однако управление осуществляется так, чтобы прерывистая работа двигателя внутреннего сгорания не осуществлялась. Таким образом, осуществляя управление так, чтобы прерывистая работа двигателя внутреннего сгорания не осуществлялась, можно подавлять приведение в действие двигателя внутреннего сгорания с использованием средства деления мощности с выводом силы реакции на ведущий вал, когда вращающийся вал электромотора и ведущий вал отсоединены друг от друга. В результате можно подавлять непредвиденные изменения оборотов ведущего вала. Термин "сцепление" включает в себя устройство сцепления, которое соединяет один вращающийся элемент с невращающимся элементом, например корзиной, а также совместно используемое устройство сцепления, которое соединяет вращающиеся элементы друг с другом.
В устройстве вывода мощности согласно первому аспекту изобретения, когда происходит сбой, средство управления может ограничивать мощность привода, выводимую из электромотора. Средство переключения может иметь возможность изменять отношение скоростей и отсоединять вращающийся вал электромотора и ведущий вал друг от друга, изменяя состояния сцепления/расцепления множественных элементов сцепления, и включать в себя средство обнаружения разъединения для определения, отсоединены ли друг от друга вращающийся вал электромотора и ведущий вал, на основании числа оборотов вращающегося вала, определенных средством определения числа оборотов вращающегося вала, и числа оборотов ведущего вала, определенных средством определения числа оборотов ведущего вала. В этом случае, когда происходит сбой, определение, отсоединены ли друг от друга вращающийся вал электромотора и ведущий вал, не может осуществляться надлежащим образом на основании числа оборотов вращающегося вала и числа оборотов ведущего вала. Однако управление осуществляется так, чтобы ограничивать мощность привода, выводимую из электромотора. Таким образом, можно подавлять вывод большой мощности привода из электромотора, когда вращающийся вал электромотора и ведущий вал отсоединены друг от друга. В результате можно подавлять резкое увеличение числа оборотов вращающегося вала.
В устройстве вывода мощности согласно первому аспекту изобретения средство деления мощности может включать в себя трехосное средство приема/вывода мощности, подключенное к трем валам, которые представляют собой выходной вал двигателя внутреннего сгорания, ведущий вал и третий вал, которое принимает или выводит, на основании мощности, принимаемой от и/или выводимой на любые два из трех валов, мощность от или на оставшийся вал, и электромотор, который принимает мощность от и выводит мощность на третий вал.
Согласно второму аспекту изобретения предложен автомобиль, снабженный устройством вывода мощности согласно любому из вышеописанных вариантов первого аспекта изобретения. В автомобиле мост подключен к ведущему валу. В основном автомобиль согласно второму аспекту изобретения снабжен устройством вывода мощности, которое выводит мощность на ведущий вал и которое включает в себя двигатель внутреннего сгорания, средство хранения, электромотор, который принимает и выводит мощность и который обменивается электрической мощностью со средством хранения, средство деления мощности, которое подключено к выходному валу двигателя внутреннего сгорания и ведущему валу и которое принимает мощность от выходного вала и выводит мощность на ведущий вал или принимает мощность от ведущего вала и выводит мощность на выходной вал, обмениваясь при этом электрической мощностью со средством хранения и обмениваясь мощностью с двигателем внутреннего сгорания, средство переключения для переноса мощности между вращающимся валом электромотора и ведущим валом с одновременным изменением отношения скоростей на основании числа оборотов вращающегося вала электромотора и числа оборотов ведущего вала, средство определения числа оборотов ведущего вала, средство определения числа оборотов вращающегося вала электромотора, средство задания необходимой мощности привода, необходимой для ведущего вала, и средство управления. В отсутствие сбоя в средстве определения числа оборотов ведущего вала и в средстве определения числа оборотов вращающегося вала средство управления управляет двигателем внутреннего сгорания, средством деления мощности, электромотором и средством переключения, в то же время изменяя отношение скоростей в средстве переключения и обеспечивая прерывистую работу двигателя внутреннего сгорания, в результате чего мощность привода, соответствующая необходимой мощности привода, выводится на ведущий вал. Когда происходит сбой в, по меньшей мере, одном из средств - средстве определения числа оборотов ведущего вала и средстве определения числа оборотов вращающегося вала, средство управления управляет двигателем внутреннего сгорания, средством деления мощности, электромотором и средством переключения, ограничивая при этом, по меньшей мере, одно из изменений отношения скоростей в средстве переключения, прерывистой работы двигателя внутреннего сгорания и вывода необходимой мощности привода на ведущий вал, в результате чего мощность привода, которая является максимально точным приближением необходимой мощности привода, выводится на ведущий вал.
В автомобиле согласно второму аспекту изобретения можно получить те же эффекты, которые обеспечивает устройство вывода мощности согласно первому аспекту изобретения, поскольку автомобиль снабжен устройством вывода мощности согласно любому из вариантов первого аспекта изобретения. Например, можно подавлять износ компонентов средства переключения и непредвиденные изменения числа оборотов ведущего вала, когда происходит сбой.
Согласно третьему аспекту изобретения предложен модуль управления для устройства вывода мощности, которое содержит двигатель внутреннего сгорания, средство хранения, электромотор, который принимает и выводит мощность и который обменивается электрической мощностью со средством хранения, средство деления мощности, которое подключено к выходному валу двигателя внутреннего сгорания и ведущему валу и которое принимает мощность от выходного вала и выводит мощность на ведущий вал или принимает мощность от ведущего вала и выводит мощность на выходной вал, обмениваясь при этом электрической мощностью со средством хранения и обмениваясь мощностью с двигателем внутреннего сгорания, средство переключения для переноса мощности между вращающимся валом электромотора и ведущим валом с одновременным изменением отношения скоростей на основании числа оборотов вращающегося вала электромотора и числа оборотов ведущего вала, средство определения числа оборотов ведущего вала, и средство определения числа оборотов вращающегося вала электромотора. Модуль управления содержит средство задания необходимой мощности привода, необходимой для ведущего вала, и средство управления. При отсутствии сбоя в средстве определения числа оборотов ведущего вала и в средстве определения числа оборотов вращающегося вала средство управления управляет двигателем внутреннего сгорания, средством деления мощности, электромотором и средством переключения, изменяя при этом отношение скоростей в средстве переключения и обеспечивая прерывистую работу двигателя внутреннего сгорания, в результате чего мощность привода, соответствующая необходимой мощности привода, выводится на ведущий вал. Когда происходит сбой в, по меньшей мере, одном из средств - средстве определения числа оборотов ведущего вала и средстве определения числа оборотов вращающегося вала, средство управления управляет двигателем внутреннего сгорания, средством деления мощности, электромотором и средством переключения, ограничивая при этом, по меньшей мере, одно из изменений отношения скоростей в средстве переключения, прерывистой работы двигателя внутреннего сгорания и вывода необходимой мощности привода на ведущий вал, в результате чего мощность привода, которая является максимально точным приближением необходимой мощности привода, выводится на ведущий вал.
Благодаря модулю управления согласно третьему аспекту изобретения при отсутствии сбоя в средстве определения числа оборотов ведущего вала для определения числа оборотов ведущего вала и в средстве определения числа оборотов вращающегося вала для определения числа оборотов вращающегося вала электромотора осуществляется управление двигателем внутреннего сгорания, средством деления мощности, электромотором и средством переключения, при этом отношение скоростей в средстве переключения изменяется, для переноса мощности между вращающимся валом и ведущим валом с одновременным изменением отношения скоростей на основании числа оборотов вращающегося вала и числа оборотов ведущего вала, и осуществляется прерывистая работа двигателя внутреннего сгорания, в результате чего мощность привода, соответствующая необходимой мощности привода, выводится на ведущий вал. С другой стороны, когда происходит сбой в, по меньшей мере, одном из средств - средстве определения числа оборотов ведущего вала и средстве определения числа оборотов вращающегося вала, осуществляется управление двигателем внутреннего сгорания, средством деления мощности, электромотором и средством переключения, при этом ограничивается, по меньшей мере, одно из изменений отношения скоростей в средстве переключения, прерывистой работы двигателя внутреннего сгорания и вывода необходимой мощности привода на ведущий вал, в результате чего мощность привода, которая является максимально точным приближением необходимой мощности привода, выводится на ведущий вал. В частности, когда происходит сбой, по меньшей мере, одно из изменений отношения скоростей в средстве переключения, прерывистой работы двигателя внутреннего сгорания и вывода необходимой мощности привода на ведущий вал ограничивается. Таким образом, можно подавлять износ элементов средства переключения и непредвиденные изменения числа оборотов ведущего вала, когда происходит сбой. Кроме того, даже когда происходит сбой, мощность привода, которая является максимально точным приближением необходимой мощности привода, выводится на ведущий вал.
Согласно четвертому аспекту изобретения предложен способ управления для устройства вывода мощности, которое содержит двигатель внутреннего сгорания, средство хранения, электромотор, который принимает и выводит мощность и который обменивается электрической мощностью со средством хранения, средство деления мощности, которое подключено к выходному валу двигателя внутреннего сгорания и ведущему валу и которое принимает мощность от выходного вала и выводит мощность на ведущий вал или принимает мощность от ведущего вала и выводит мощность на выходной вал, обмениваясь при этом электрической мощностью со средством хранения и обмениваясь мощностью с двигателем внутреннего сгорания, средство переключения для переноса мощности между вращающимся валом электромотора и ведущим валом с одновременным изменением отношения скоростей на основании числа оборотов вращающегося вала электромотора и числа оборотов ведущего вала, средство определения числа оборотов ведущего вала, и средство определения числа оборотов вращающегося вала электромотора. Согласно способу управления при отсутствии сбоя в средстве определения числа оборотов ведущего вала и в средстве определения числа оборотов вращающегося вала осуществляется управление двигателем внутреннего сгорания, средством деления мощности, электромотором и средством переключения, при этом изменяется отношение скоростей в средстве переключения, и осуществляется прерывистая работа двигателя внутреннего сгорания, в результате чего мощность привода, необходимая для ведущего вала, выводится на ведущий вал. С другой стороны, когда происходит сбой в, по меньшей мере, одном из средств - средстве определения числа оборотов ведущего вала и средстве определения числа оборотов вращающегося вала, осуществляется управление двигателем внутреннего сгорания, средством деления мощности, электромотором и средством переключения, при этом ограничивается, по меньшей мере, одно из изменений отношения скоростей в средстве переключения, прерывистой работы двигателя внутреннего сгорания, и вывода мощности привода, необходимой для ведущего вала, на ведущий вал, в результате чего мощность привода, которая является максимально точным приближением необходимой мощности привода, выводится на ведущий вал.
Благодаря способу управления согласно четвертому аспекту изобретения при отсутствии сбоя в средстве определения числа оборотов ведущего вала для определения числа оборотов ведущего вала и в средстве определения числа оборотов вращающегося вала для определения числа оборотов вращающегося вала электромотора осуществляется управление двигателем внутреннего сгорания, средством деления мощности, электромотором и средством переключения, при этом изменяется отношение скоростей в средстве переключения для переноса мощности между вращающимся валом и ведущим валом с одновременным изменением отношения скоростей на основании числа оборотов вращающегося вала и числа оборотов ведущего вала и осуществляется прерывистая работа двигателя внутреннего сгорания, в результате чего мощность привода, соответствующая необходимой мощности привода, выводится на ведущий вал. С другой стороны, когда происходит сбой в, по меньшей мере, одном из средств - средстве определения числа оборотов ведущего вала и средстве определения числа оборотов вращающегося вала, осуществляется управление двигателем внутреннего сгорания, средством деления мощности, электромотором и средством переключения, при этом ограничивается, по меньшей мере, одно из изменений отношения скоростей в средстве переключения, прерывистой работы двигателя внутреннего сгорания и вывода необходимой мощности привода на ведущий вал, в результате чего мощность привода, которая является максимально точным приближением необходимой мощности привода, выводится на ведущий вал. В частности, когда происходит сбой, ограничивается, по меньшей мере, одно из изменений отношения скоростей в средстве переключения, прерывистой работы двигателя внутреннего сгорания и вывода необходимой мощности привода на ведущий вал. Таким образом, можно подавлять износ элементов средства переключения и непредвиденные изменения числа оборотов ведущего вала, когда происходит сбой. Кроме того, даже когда происходит сбой, мощность привода, которая является максимально точным приближением необходимой мощности привода, выводится на ведущий вал.
Краткое описание чертежей
Вышеизложенные и иные задачи, признаки и преимущества изобретения следуют из нижеследующего описания варианта осуществления со ссылками на прилагаемые чертежи, на которых:
фиг.1 изображает схематично конструкцию гибридного автомобиля 20, содержащего устройство вывода мощности, согласно варианту осуществления изобретения;
фиг.2 - схему конструкции коробки 60 передач согласно изобретению;
фиг.3 - схему конструкции гидравлической системы 100 согласно изобретению;
фиг.4A и 4B - логические блок-схемы последовательности операций способа управления приводом, осуществляемого модулем 70 электронного управления, установленным в гибридном автомобиле 20, согласно изобретению;
фиг.5 - логическую блок-схему последовательности операций способа задания флага определения освобождения обоих тормозов согласно изобретению;
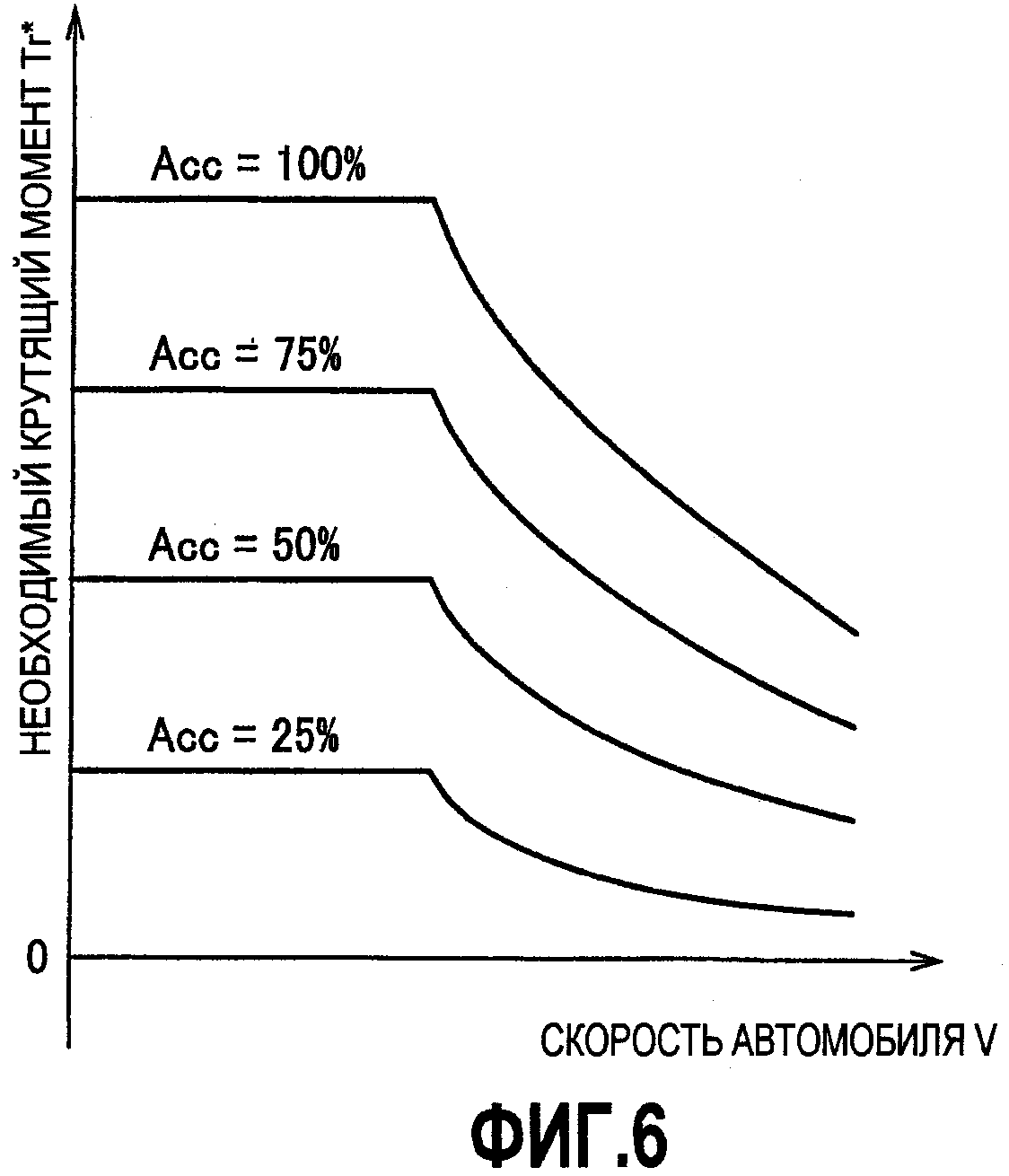
фиг.6 - диаграммы карты, используемой для задания необходимого крутящего момента, согласно изобретению;
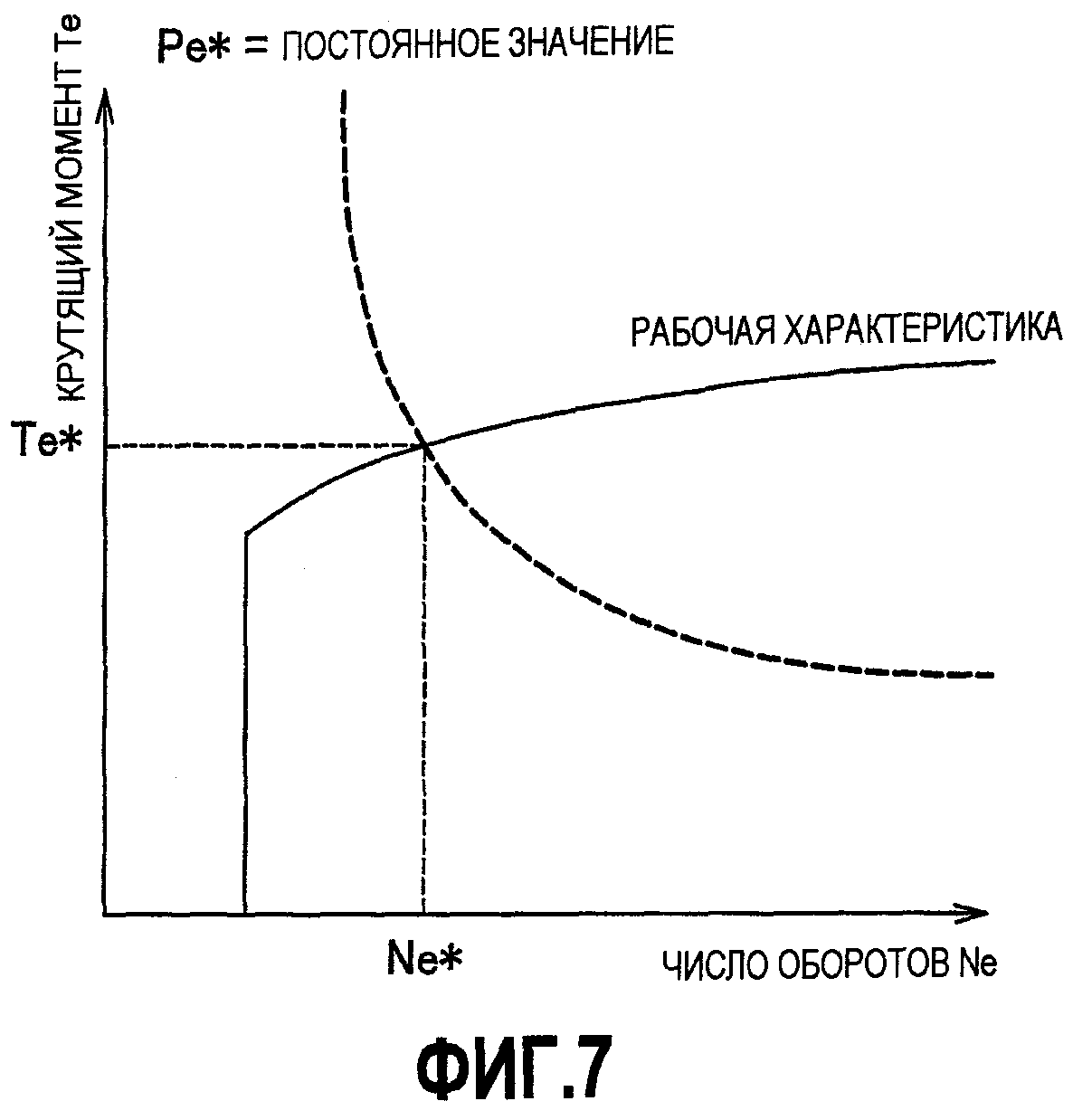
фиг.7 - диаграммы рабочей характеристики двигателя 22 и способа задания конечного числа оборотов Ne* и конечного крутящего момента Te* согласно изобретению;
фиг.8 - диаграмму коллинеарного вида, используемого для описания вращающихся элементов механизма 30 деления/объединения мощности с динамической точки зрения согласно изобретению;
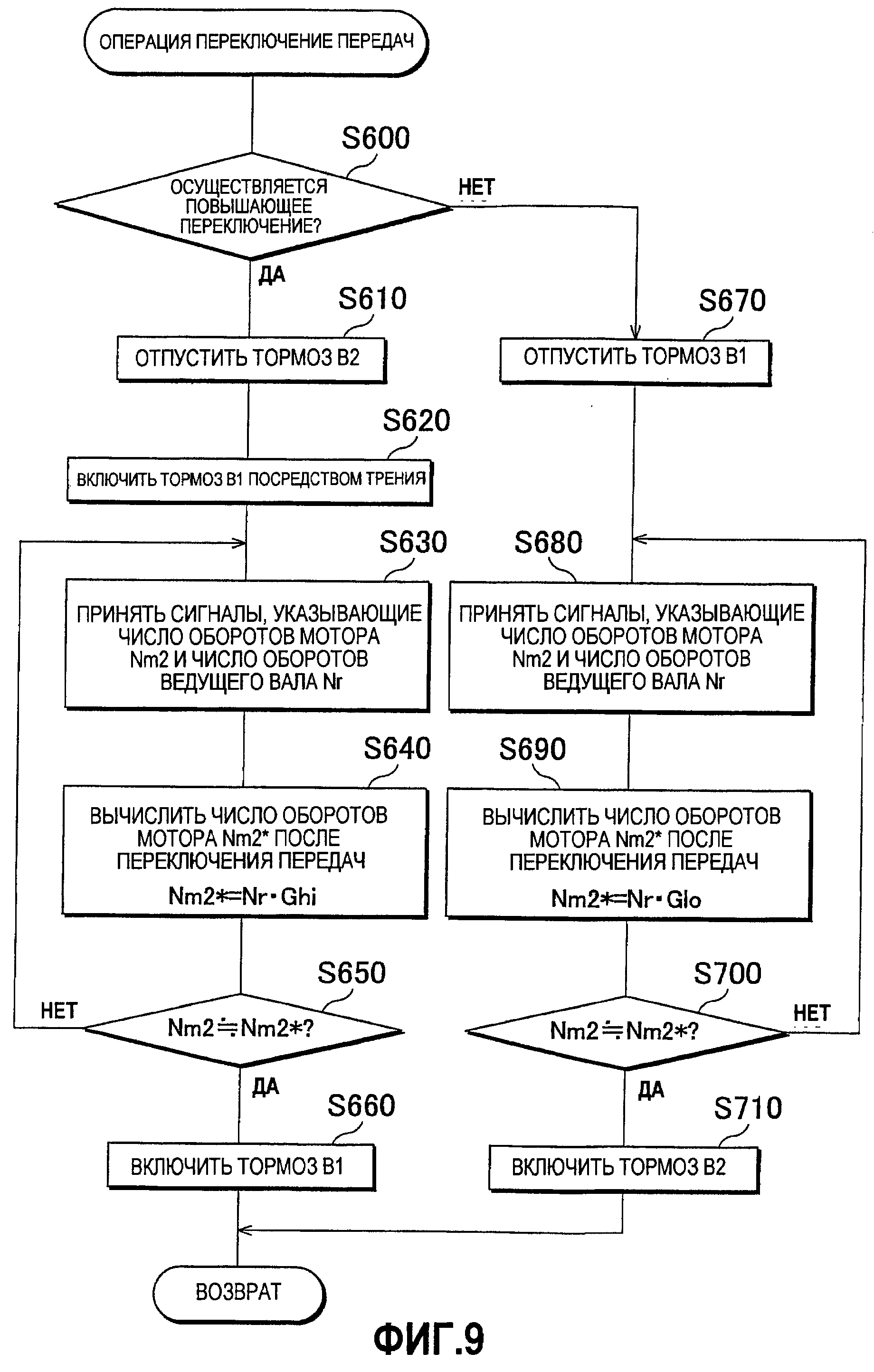
фиг.9 - логическую блок-схему последовательности операций способа переключения согласно изобретению;
фиг.10 - схему конструкции гибридного автомобиля 120 согласно видоизмененному варианту осуществления изобретения;
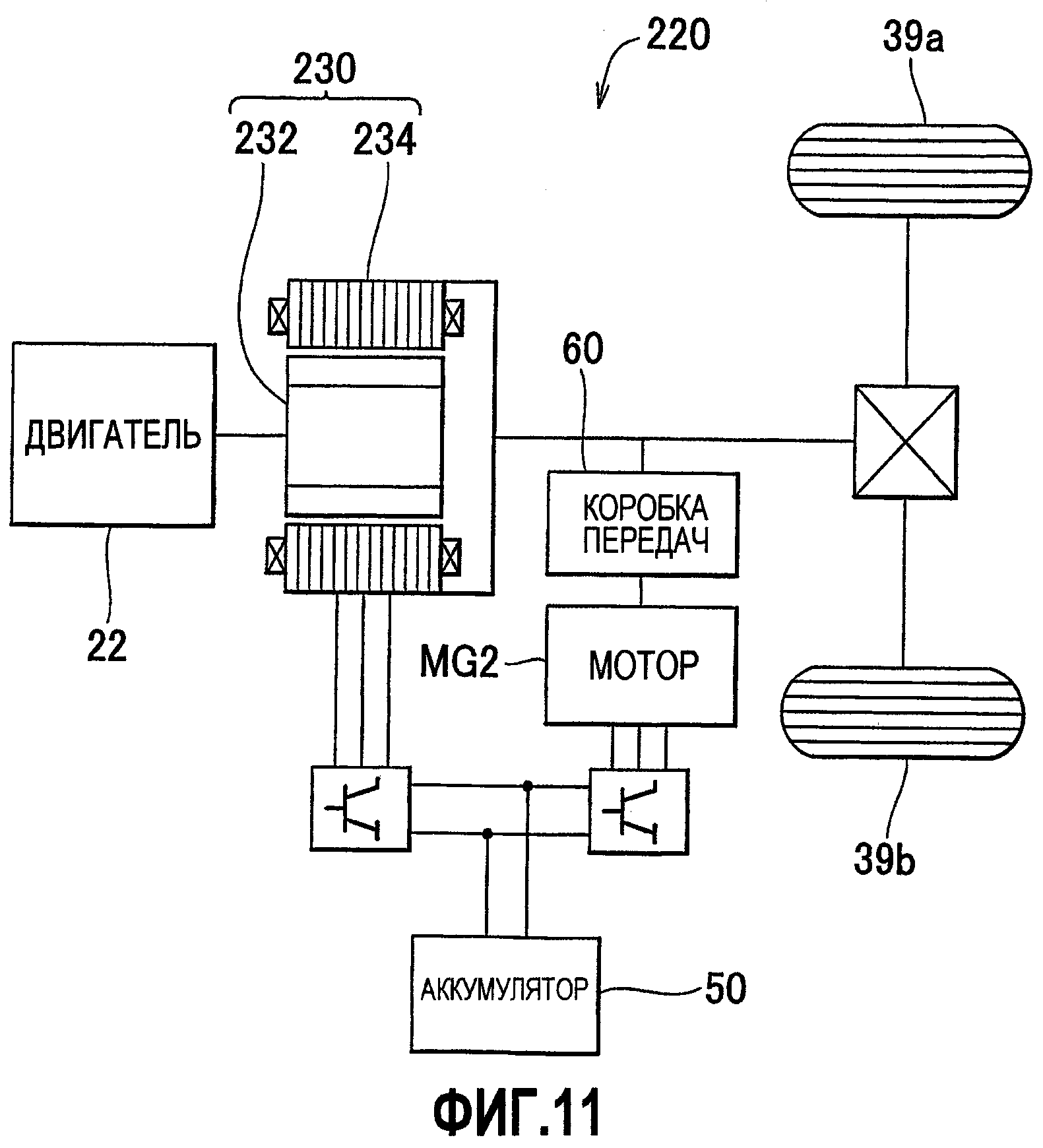
фиг.11 - схему конструкции гибридного автомобиля 220 согласно другому видоизмененному варианту осуществления изобретения.
Подробное описание предпочтительного варианта осуществления изобретения
На фиг.1 схематически показана конструкция гибридного автомобиля 20, который содержит устройство вывода мощности согласно варианту осуществления изобретения. Гибридный автомобиль 20 (фиг.1) содержит двигатель 22, трехосный механизм 30 деления/объединения мощности, который соединен через демпфер 28 с коленвалом 26, служащим выходным валом двигателя 22, мотор MG1, который подключен к механизму 30 деления/объединения мощности и который генерирует электрическую мощность, мотор MG2, который подключен к механизму 30 деления/объединения мощности через коробку 60 передач, и модуль 70 электронного управления для гибридного автомобиля (ниже именуемый «гибридным ECU»), который управляет всей приводной системой гибридного автомобиля 20.
Двигатель 22 представляет собой двигатель внутреннего сгорания, который генерирует мощность с использованием углеводородного топлива, например бензина или дизельного топлива. Модуль электронного управления для двигателя (ниже именуемый "ECU двигателя") 24 осуществляет управление работой двигателя 22, например управление впрыском топлива, управление зажиганием и управление регулировкой количества всасываемого воздуха. ECU 24 двигателя принимает сигналы от различных датчиков, которые определяют рабочее состояние двигателя 22. ECU 24 двигателя принимает сигналы, например, от датчика 23 положения коленвала, присоединенного к коленвалу 26. ECU 24 двигателя осуществляет связь с гибридным ECU 70. ECU 24 двигателя управляет работой двигателя 22 на основании сигналов управления от гибридного ECU 70. При необходимости ECU 24 двигателя передает данные, касающиеся рабочего состояния двигателя 22, на гибридный ECU 70.
Механизм 30 деления/объединения мощности сформирован из планетарной передачи, которая включает в себя солнечную шестерню 31, выполненную в виде зубчатого колеса внешнего зацепления, коронную шестерню 32, выполненную в виде зубчатого колеса внутреннего зацепления и обеспеченную коаксиально солнечной шестерней 31, множественные сателлиты 33, находящиеся в зацеплении с солнечной шестерней 31 и коронной шестерней 32, и опору 34, которая поддерживает множественные сателлиты 33, в результате чего сателлиты 33 могут вращаться вокруг своих осей и перемещаться вокруг солнечной шестерни 31. Планетарная передача изменяет число оборотов между вращающимися элементами, т.е. солнечной шестерней 31, коронной шестерней 32 и опорой 34.
В механизме 30 деления/объединения мощности коленвал 26 двигателя 22 соединен с опорой 34, мотор MG1 соединен с солнечной шестерней 31 и мотор MG2 соединен с коронной шестерней 32 через коробку 60 передач. Когда мотор MG1 служит генератором электрической мощности, механизм 30 деления/объединения мощности распределяет мощность, выводимую из двигателя 22 на опору 34, между солнечной шестерней 31 и коронной шестерней 32 на основании передаточного числа между ними. Когда мотор MG1 выступает в роли электромотора, механизм деления/объединения мощности 30 объединяет мощность, выводимую из двигателя 22 на опору 34, и мощность, выводимую из мотора MG1 на солнечную шестерню 31. Затем механизм 30 деления/объединения мощности выводит объединенную мощность на коронную шестерню 32. Коронная шестерня 32 механически подключена к ведущим колесам 39a, 39b через дифференциал 38. Поэтому мощность, выводимая на коронную шестерню 32, выводится на ведущие колеса 39a, 39b через редуктор 37 и дифференциал 38.
Мотор MG1 и мотор MG2 выполнены в виде известных синхронных мотор-генераторов и могут выступать в качестве генераторов электрической мощности, а также электромоторов. Моторы MG1, MG2 обмениваются электрической мощностью с аккумулятором 50 через инверторы 41, 42, соответственно. Силовая электрическая линия 54, соединяющая инверторы 41, 42 с аккумулятором 50, выполнена в виде положительной шины и отрицательной шины, которые совместно используются инверторами 41, 42. Электрическая мощность, генерируемая одним из моторов MG1, MG2, может потребляться другим из моторов MG1, MG2. Соответственно, моторы MG1, MG2 могут генерировать электрическую мощность для подачи на аккумулятор 50, или, альтернативно, аккумулятор может разряжать электрическую мощность для компенсации недостатка электрической мощности в моторах MG1, MG2.
Если баланс электрической мощности поддерживается между мотором MG1 и мотором MG2, аккумулятор 50 не принимает электрическую мощность и не отдает электрическую мощность моторам MG1, MG2. Оба мотора MG1, MG2 действуют под управлением модуля электронного управления для мотора (ниже именуемого "ECU мотора") 40. ECU 40 мотора принимает сигналы, необходимые для управления моторами MG1, MG2, например сигналы от датчиков 43, 44 поворотного положения, которые регистрируют поворотные положения роторов моторов MG1, MG2, соответственно, и сигналы, указывающие токи фаз, подаваемые на моторы MG1, MG2, которые, в свою очередь, регистрируются датчиками тока (не показаны). ECU 40 мотора передает сигналы управления коммутацией на инверторы 41, 42.
ECU 40 мотора вычисляет число оборотов Nm1, Nm2 роторов моторов MG1, MG2 на основании сигналов, полученных от датчиков 43, 44 поворотного положения, соответственно, согласно способу вычисления числа оборотов (не показан). ECU 40 мотора осуществляет связь с гибридным ECU 70. ECU 40 мотора управляет моторами MG1, MG2 на основании сигналов управления от гибридного ECU 70 и, при необходимости, передает данные, касающиеся рабочих состояний моторов MG1, MG2, на гибридный ECU 70.
Коробка 60 передач расположена между вращающимся валом 48 мотора MG2 и валом 32a коронной шестерни и соединяет/разъединяет вращающийся вал 48 и вал 32a коронной шестерни между собой. Когда вращающийся вал 48 и вал 32 коронной шестерни соединены друг с другом через коробку 60 передач, коробка 60 передач может снижать число оборотов вращающегося вала 48 мотора MG2 в одно из двух значений числа оборотов и выводить вращение со сниженным числом оборотов на вал 32a коронной шестерни. На фиг.2 показана иллюстративная конструкция коробки 60 передач.
Коробка 60 передач (фиг.2) содержит планетарную передачу 60a с двойными сателлитами, планетарную передачу 60b с одинарными сателлитами и два тормоза B1, B2. Планетарная передача 60a с двойными сателлитами включает в себя солнечную шестерню 61, выполненную в виде зубчатого колеса внешнего зацепления, коронную шестерню 62, выполненную в виде зубчатого колеса внутреннего зацепления, обеспеченную коаксиально солнечной шестерне 61, множественные первые сателлиты 63a, находящиеся в зацеплении с солнечной шестерней 61, множественные вторые сателлиты 63b, находящиеся в зацеплении с первыми сателлитами 63a, а также коронной шестерней 62, и опору 64, которая поддерживает первые сателлиты 63a и вторые сателлиты 63b, благодаря чему первые сателлиты 63a входят в зацепление с соответствующими вторыми сателлитами 63b, могут вращаться вокруг своих осей и перемещаться вокруг солнечной шестерни 61. Вращение солнечной шестерни 61 разблокируется/блокируется путем освобождения/включения тормоза B1.
Планетарная передача 60b с одинарными сателлитами включает в себя солнечную шестерню 65, выполненную в виде зубчатого колеса внешнего зацепления, коронную шестерню 66, выполненную в виде зубчатого колеса внутреннего зацепления, обеспеченную коаксиально солнечной шестерне 65, множественные сателлиты 67, находящиеся в зацеплении с солнечной шестерней 65, а также коронной шестерней 66, и опору 68, которая поддерживает сателлиты 67, благодаря чему сателлиты 67 могут вращаться вокруг своих осей и перемещаться вокруг солнечной шестерни 65. Солнечная шестерня 65 соединена с вращающимся валом 48 мотора MG2. Опора 68 соединена с валом 32a коронной шестерни. Вращение коронной шестерни 66 разблокируется/блокируется путем освобождения/включения тормоза B2.
Планетарная передача 60a с двойными сателлитами и планетарная передача 60b с одинарными сателлитами соединены друг с другом через коронную шестерню 62, коронную шестерню 66, опору 64 и опору 68. В коробке 60 передач вращающийся вал 48 мотора MG2 отсоединяется от вала коронной шестерни 32a путем отпуска обоих тормозов B1, B2. Когда тормоз B1 отпущен, а тормоз B2 действует, число оборотов вращающегося вала 48 мотора MG2 снижается с относительно большим коэффициентом снижения числа оборотов, и вращение со сниженным числом оборотов выводится на вал 32a коронной шестерни (ниже именуемый "низшей передачей"). Когда тормоз B1 действует, а тормоз B2 отпущен, число оборотов вращающегося вала 48 мотора MG2 снижается с относительно малым коэффициентом снижения числа оборотов, и вращение со сниженным числом оборотов выводится на вал 32a коронной шестерни (ниже именуемый "высшей передачей").
Когда действуют оба тормоза B1, B2, вращение вращающегося вала 48 и вала коронной шестерни 32a блокируются.
Тормоза B1, B2 включаются/освобождаются гидравлическим давлением из гидравлической системы 100 (фиг.3). Гидравлическая система 100 содержит механический насос 102, который подает, под давлением, масло с использованием мощности от двигателя 22, который подает, под давлением, масло с использованием мощности от мотора 104a, встроенного в электрический насос 104, трехпозиционный электромагнитный клапан 105 и клапан 106 регулировки давления, которые управляют величинами давления в линии (давление в линии) масла, подаваемого, под давлением, от механического насоса 102 и электрического насоса 104, линейные электромагнитные клапаны 110, 111 и управляющие клапаны 112, 113, которые подают давление в линии на тормоза B1, B2, соответственно, одновременно регулируя давление в линии, клапан-модулятор 108, который снижает давление в линии и подает сниженное давление в линии на входные каналы трехпозиционного электромагнитного клапана 105 и линейных электромагнитных клапанов 110, 111, предохранительные клапаны 114, 115, расположенные между управляющими клапанами 112, 113 и тормозами B1, B2, соответственно, и накопители 116, 117, расположенные между предохранительными клапанами 114, 115 и тормозами B1, B2, соответственно. Когда гидравлическое давление поступает от одного из управляющих клапанов 112, 113, предохранительные клапаны 114, 115 открывают масляный канал к соответствующему тормозу и перекрывают масляный канал к другому тормозу. Когда происходит сбой, например, когда гидравлические давления поступают от обоих управляющих клапанов 112, 113, предохранительные клапаны 114, 115 блокируют оба масляных канала к тормозам B1, B2.
Аккумулятор 50 действует под управлением модуля электронного управления для аккумулятора (ниже именуемого "ECU аккумулятора") 52. ECU 52 аккумулятора принимает сигналы, необходимые для управления аккумулятором 50, например, сигнал, указывающий напряжением, регистрируемым между клеммами аккумулятора 50, который передается от датчика напряжения (не показан), предусмотренного между клеммами аккумулятора 50, сигналы, указывающие электрические токи заряда/разряда аккумулятора 50, которые передаются от датчика тока (не показан), присоединенного к электрической силовой линии 54, подключенной к выходной клемме аккумулятора 50, и сигнал, указывающий температуру аккумулятора, который передается от датчика температуры (не показан), присоединенного к аккумулятору 50. ECU 52 аккумулятора передает, при необходимости, данные, касающиеся состояния аккумулятора 50, на гибридный ECU 70. Для управления аккумулятора 50 ECU 52 аккумулятора вычисляет состояние заряда (SOC) на основании значения, полученного накоплением величин электрических токов заряда/разряда аккумулятора 50, которые регистрируются датчиком тока.
Гибридный ECU 70 выполнен в виде микропроцессора, в основном, включающего в себя CPU 72. Гибридный ECU 70, помимо CPU 72, содержит ROM 74, где хранятся программы обработки, RAM 76 для временного хранения данных, входной порт (не показан), выходной порт (не показан) и порт связи (не показан).
Гибридный ECU 70 принимает, через входной порт, сигнал, передаваемый от датчика 36 числа оборотов, указывающего число оборотов Nr вала 32a коронной шестерни, выступающего в роли ведущего вала, сигнал зажигания от ключа 80 зажигания, сигнал, указывающий положение рычага переключения передач SP от датчика 82 положения рычага переключения передач, который определяет положение рычага 81 переключения передач, сигнал, указывающий степень использования педали акселератора Ace, регистрируемую датчиком 84 положения педали акселератора, соответствующую глубине нажатия педали акселератора 83, сигнал, указывающий положение педали тормоза BP, регистрируемое датчиком 86 положения педали тормоза, соответствующее глубине нажатия педали тормоза 85, сигнал, указывающий скорость автомобиля V, от датчика 88 скорости автомобиля, сигнал, указывающий давление в линии PL, от гидравлического переключателя 120, который активируется/деактивируется давлением в линии в гидравлической системе 100, сигнал, указывающий температуру масла Toil от датчика 121 температуры масла, который определяет температуру масла, подаваемого под давлением механическим насосом 102 и электрическим насосом 104, сигнал, указывающий давление в тормозе Pb1 от гидравлического переключателя 122, который активируется/деактивируется гидравлическим давлением, подаваемым на тормоз B1, сигнал, указывающий давление в тормозе Pb2 от гидравлического переключателя 123, который активируется/деактивируется гидравлическим давлением, подаваемым на тормоз B2, и т.д.
Гибридный ECU 70 передает, например, управляющие сигналы на трехпозиционный электромагнитный клапан 105 и линейные электромагнитные клапаны 110, 111. Как описано выше, гибридный ECU 70 подключен к ECU 24 двигателя, ECU 40 мотора и ECU 52 аккумулятора через порт связи. Гибридный ECU 70 обменивается различными сигналами управления и данными с ECU 24 двигателя, ECU 40 мотора и ECU 52 аккумулятора.
В гибридном автомобиле 20 такой конструкции необходимый крутящий момент, подлежащий выводу на вал 32a коронной шестерни, вычисляется на основании степени использования педали акселератора Ace, соответствующей глубине нажатия педали акселератора 83 водителем, и скорости автомобиля V. Затем двигатель 22, мотор MG1 и мотор MG2 управляются так, чтобы необходимая мощность, соответствующая необходимому крутящему моменту, выводилась на вал 32a коронной шестерни.
Управление работой двигателя 22, мотора MG1 и мотора MG2 включает в себя режим работы с преобразованием крутящего момента, режим работы с подачей/отводом электрической мощности и режим работы мотора. В режиме работы с преобразованием крутящего момента двигатель 22 управляется так, чтобы мощность, соответствующая необходимой мощности, выводилась из двигателя 22, и моторы MG1, MG2 управляются так, чтобы вся мощность, выводимая из двигателя 22, претерпевала преобразование крутящего момента механизмом 30 деления/объединения мощности, мотором MG1 и мотором MG2 и затем выводилась на вал 32a коронной шестерни. В режиме работы с подачей/отводом электрической мощности двигатель 22 управляется так, чтобы мощность, соответствующая значению, которое получается суммированием электрической мощности, подаваемой на аккумулятор 50, с необходимой мощностью, или которая получается вычитанием электрической мощности, отдаваемой аккумулятором 50, из необходимой мощности, выводилась из двигателя 22. Кроме того, моторы MG1, MG2 управляются так, чтобы мощность, которая выводится из двигателя 22, полностью или частично, на основании величины электрической мощности, поступающей на аккумулятор 50 или отдаваемой им, претерпевала преобразование крутящего момента механизмом 30 деления/объединения мощности, мотором MG1 и мотором MG2, и необходимая мощность выводилась на вал 32a коронной шестерни. В режиме работы мотора управление работой осуществляется таким образом, что двигатель 22 заглушается, и мощность, соответствующая необходимой мощности из мотора MG2, выводится на вал 32a коронной шестерни.
Работа гибридного автомобиля 20 такой конструкции осуществляется следующим образом. На фиг.4 показана блок-схема этапов иллюстративного способа управления приводом, осуществляемого гибридным ECU 70. Способ осуществляется в заранее определенные интервалы времени, например несколько миллисекунд.
В способе управления приводом, прежде всего, CPU 72 гибридного ECU 70 принимает данные, необходимые для управления приводом. В частности, CPU 72 принимает сигнал, указывающий степень использования педали акселератора Ace, от датчика 84 положения педали акселератора, сигнал, указывающий скорость автомобиля V, от датчика 88 скорости автомобиля, сигнал, указывающий число оборотов Nr вала 32a коронной шестерни, от датчика 36 числа оборотов, сигнал, указывающий число оборотов Ne двигателя 22, сигналы, указывающие число оборотов Nm1, Nm2 моторов MG1, MG2, сигналы, указывающие входной предел Win и выходной предел Wout для аккумулятора 50, флаг определения состояния датчика числа оборотов F1, который указывает, правильно ли работает датчик 36 числа оборотов и способен ли он определять число оборотов Nr вала 32a коронной шестерни, флаг определения состояния датчика поворотного положения F2, который указывает, правильно ли работает датчик 44 поворотного положения и способен ли он определять поворотное положение ротора мотора MG2, флаг определения освобождения обоих тормозов F3, который указывает, имеется ли возможность, что оба тормоза B1, B2 коробки 60 передач отпущены, и т.д. (этап S100). Число оборотов Ne двигателя 22 вычисляется на основании сигнала от датчика 23 положения коленвала, присоединенного к коленвалу 26, и вычисленное число оборотов Ne передается от ECU 24 двигателя на гибридный ECU 70.
Число оборотов Nm1, Nm2 моторов MG1, MG2 вычисляется на основании поворотных положений роторов моторов MG1, MG2, зарегистрированных датчиками поворотного положения 43, 44, соответственно, и вычисленное число оборотов Nm1, Nm2 передается от ECU 40 мотора на гибридный ECU 70. Кроме того, входной предел Win и выходной предел Wout для аккумулятора 50 задаются на основании температуры аккумулятора Tb, регистрируемой датчиком температуры (не показан), и состояния заряда (SOC) аккумулятора 50, и входной предел Win и выходной предел Wout передаются от ECU 52 аккумулятора на гибридный ECU 70.
Определение состояния датчика числа оборотов осуществляется гибридным ECU 70 для определения, например, была ли передача сигнала от датчика 36 числа оборотов на гибридный ECU 70 остановлена в течение заранее определенного периода времени. Если определено, что датчик 36 числа оборотов работает правильно, значение флага определения состояния датчика числа оборотов F1 задается равным "0". С другой стороны, если определено, происходит сбой в датчике 36 числа оборотов, значение флага определения состояния датчика числа оборотов F1 задается равным "1". CPU 72 гибридного ECU 70 получает флаг определения состояния датчика числа оборотов F1, указывающий "0" или "1", считывая его по заранее определенному адресу в RAM 76.
Определение состояния датчика поворотного положения осуществляется ECU 40 мотора для определения, например, была ли передача сигнала от датчика 44 поворотного положения на ECU 40 мотора остановлена в течение заранее определенного периода времени. Если определено, что датчик 44 поворотного положения работает правильно, значение флага определения состояния датчика поворотного положения F2 задается равным "0". С другой стороны, если определено, происходит сбой в датчике 44 поворотного положения, значение флага определения состояния датчика поворотного положения F2 задается равным "1". Флаг определения состояния датчика поворотного положения F2, указывающий "0" или "1", передается от ECU 40 мотора на гибридный ECU 70. Способ задания флага определения освобождения обоих тормозов (фиг.5) осуществляется для определения, имеется ли возможность, что оба тормоза B1, B2 отпущены. Если определено, что один из тормозов B1, B2 коробки 60 передач действует, значение флага определения освобождения обоих тормозов F3 задается равным "0". С другой стороны, если определено, что имеется возможность, что оба тормоза B1, B2 отпущены, например, вследствие сбоя гидравлической системе 100, в частности, имеется возможность, что вращающийся вал 48 мотора MG2 отсоединен от вала коронной шестерни 32a, значение флага определения освобождения обоих тормозов F3 задается равным "1". CPU 72 гибридного ECU 70 получает флаг определения освобождения обоих тормозов F3, указывающий "0" или "1", считывая его по заранее определенному адресу в RAM 76.
Способ задания флага определения освобождения обоих тормозов показан на фиг.5. Способ осуществляется в заранее определенные интервалы времени, например несколько миллисекунд.
В способе задания флага определения освобождения обоих тормозов CPU 72 гибридного ECU 70 принимает флаг определения состояния датчика числа оборотов F1 и флаг определения состояния датчика поворотного положения F2 (этап S400), как на этапе S100 в способе управления приводом (фиг.4). Затем CPU 72 гибридного ECU 70 проверяет значения флага определения состояния датчика числа оборотов F1 и флага определения состояния датчика поворотного положения F2 (этап S410). Если флаг определения состояния датчика числа оборотов F1 и флаг определения состояния датчика поворотного положения F2 указывают "0", CPU 72 гибридного ECU 70 определяет, что датчик 36 числа оборотов и датчик 44 поворотного положения работают правильно, и принимает сигналы, указывающие число оборотов Nm2 мотора MG2 и число оборотов Nr вала 32a коронной шестерни (этап S420), как на этапе S100 в способе управления приводом (фиг.4). Затем CPU 72 гибридного ECU 70 вычисляет текущее передаточное число Gr в коробке 60 передач делением числа оборотов Nm2 мотора MG2 на число оборотов Nr вала 32a коронной шестерни (этап S430).
CPU 72 гибридного ECU 70 определяет передачу, выбранную в коробке 60 передач (этап S440). Если определено, что в коробке 60 передач установлена высшая передача, CPU 72 гибридного ECU 70 сравнивает абсолютную величину значения, полученного вычитанием передаточного числа Ghi на высшей передаче из текущего передаточного числа Gr (=Nm2/Nr), с пороговым значением Gref (этап S450). Когда абсолютная величина значения (Gr-Ghi) меньше порогового значения Gref, значение флага определения освобождения обоих тормозов F3 задается равным "0" (этап S460). С другой стороны, когда абсолютная величина значения (Gr-Ghi) больше или равна пороговому значению Gref, значение флага определения освобождения обоих тормозов F3 задается равным "1" (этап S470). Затем способ задания флага определения освобождения обоих тормозов заканчивается. С другой стороны, если на этапе S440 определено, что на коробке 60 передач установлена низшая передача, CPU 72 сравнивает абсолютную величину значения, полученного вычитанием передаточного числа Glo на низшей передаче из текущего передаточного числя Gr, с пороговым значением Gref (этап S480). Когда абсолютная величина значения (Gr-Glo) меньше порогового значения Gref, значение флага определения освобождения обоих тормозов F3 задается равным "0" (этап S490). С другой стороны, когда абсолютная величина значения (Gr-Glo) больше или равна пороговому значению Gref, значение флага определения освобождения обоих тормозов F3 задается равным "1" (этап S500). Затем процедура задания флага определения освобождения обоих тормозов заканчивается.
Пороговое значение Gref используется для определения, можно ли рассматривать вычисленное текущее передаточное число Gr как равное передаточному числу Ghi на высшей передаче или передаточному числу Glo на низшей передаче. Пороговое значение Gref задается, например, на основании точности датчика 44 поворотного положения и точности датчика 36 числа оборотов. В способе задания флага определения освобождения обоих тормозов производится определение, имеется ли возможность, что оба тормоза B1, B2 коробки 60 передач отпущены, на основании числа оборотов Nm2 мотора MG2 и числа оборотов Nr вала коронной шестерни 32a.
Если передаточное число Gr отклоняется от передаточного числа Ghi на высшей передаче, когда коробка 60 передач должна быть на высшей передаче, или если передаточное число Gr отклоняется от передаточного числа Glo на низшей передаче, когда коробка 60 передач должна быть на низшей передаче, производится определение, что имеется возможность отпуска обоих тормозов B1, B2, например, вследствие сбоя в гидравлической системе 100. Затем CPU 72 задает значение флага определения освобождения обоих тормозов F3, равным "1".
Если на этапе S410 определено, что, по меньшей мере, один из флагов определения состояния датчика числа оборотов F1 и флагов определения состояния датчика поворотного положения F2 указывает "1", производится определение, что сбой произошел в, по меньшей мере, одном из датчиков 36 числа оборотов и датчиков 44 поворотного положения. В этом случае, поскольку невозможно определить, имеется ли возможность, что оба тормоза B1, B2 коробки 60 передач отпущены, на основании числа оборотов Nm2 мотора MG2 и числа оборотов Nr вала 32a коронной шестерни, способ задания флага определения освобождения обоих тормозов заканчивается без задания значения флага определения освобождения обоих тормозов F3.
Далее управление приводом (фиг.4) осуществляется следующим образом. После приема данных на этапе S100 гибридный ECU 70 проверяет значение флага определения состояния датчика числа оборотов F1 и флага определения состояния датчика поворотного положения F2 (этап S110). Когда флаг определения состояния датчика числа оборотов F1 и флаг определения состояния датчика поворотного положения F2 указывают "0", гибридный ECU 70 определяет, что датчик 36 числа оборотов и датчик 44 поворотного положения работают правильно, и задает необходимый крутящий момент Tr*, для вывода на вал 32a коронной шестерни, подключенный к ведущим колесам 39a, 39b, как крутящий момент, необходимый для автомобиля, и необходимую мощность Pe*, необходимую для автомобиля, на основании полученных степени использования педали акселератора Ace и скорости автомобиля V (этап S120). Соотношение между степенью использования педали акселератора Ace, скоростью автомобиля V и необходимым крутящим моментом Tr* устанавливается заранее и хранится в ROM 74 в качестве карты задания необходимого крутящего момента. Необходимый крутящий момент Tr* выводится из карты на основании степени использования педали акселератора Ace и скорости автомобиля V.
На фиг.6 показана карта задания необходимого крутящего момента. Необходимая мощность Pe* получается путем суммирования значения, полученного путем умножения необходимого крутящего момента Tr* на число оборотов Nr вала 32a коронной шестерни, необходимой мощности заряда/разряда Pb*, необходимой для аккумулятора 50, и потерь Loss. Число оборотов Nr вала коронной шестерни 32a можно получить путем умножения скорости V автомобиля на коэффициент преобразования "k" вместо того, чтобы получать значение, зарегистрированное датчиком 36 числа оборотов.
Затем гибридный ECU 70 определяет, отдана ли команда смены передачи в коробке 60 передач (этап S130). Команда смены передачи в коробке 60 передач отдается в заранее заданный момент времени на основании необходимого крутящего момента Tr* и скорости автомобиля V. Если определено, что команда смены передачи в коробке 60 передач не отдана, гибридный ECU 70 проверяет значение флага определения освобождения обоих тормозов F3 (этап S140). Если флаг определения освобождения обоих тормозов F3 указывает "0", гибридный ECU 70 определяет, что включен один из тормозов B1, B2 коробки 60 передач, и сравнивает необходимую мощность Pe* с пороговым значением Pref (этап S170). Пороговое значение Pref задается, например, на основании параметров двигателя 22. Пороговое значение Pref задается, например, на нижний предел мощности, при котором двигатель 22 работает эффективно.
Когда необходимая мощность Pe* больше или равна пороговому значению Pref, гибридный ECU 70 определяет, работает ли двигатель 22 (этап S180). Если определено, что двигатель 22 работает, гибридный ECU 70 задает конечное число оборотов Ne* и конечный крутящий момент Te* для двигателя 22 на основании необходимой мощности Pe* (этап S190). Конечное число оборотов Ne* и конечный крутящий момент Te* задаются на основании рабочей характеристики, в соответствии с которой двигатель 22 работает эффективно, и необходимой мощности Pe*.
На фиг.7 показаны рабочая характеристика двигателя 22 и способ задания конечного числа оборотов Ne* и конечного крутящего момента Te*. Конечное число оборотов Ne* и конечный крутящий момент Te* получаются с использованием точки пересечения рабочей характеристики и кривой, на которой необходимая мощность Pe* (Ne*×Te*) поддерживается постоянной.
После задания конечного числа оборотов Ne* и конечного крутящего момента Te* двигателя 22 конечное число оборотов Nm1* мотора MG1 вычисляется согласно следующему уравнению (1) на основании конечного числа оборотов Ne* двигателя 22, числа оборотов Nr вала коронной шестерни 32a и передаточного числа ρ механизма 30 деления/объединения мощности. Кроме того, командное значение крутящего момента Tm1* для мотора MG1 вычисляется согласно уравнению (2) на основании конечного числа оборотов Nm1* и текущего числа оборотов Nm1 (этап S200). Уравнение (1) - это динамическое уравнение, описывающее вращающиеся элементы механизма 30 деления/объединения мощности.
На фиг.8 показан коллинеарный вид, указывающий динамическое соотношение между числом оборотов и крутящим моментом во вращающихся элементах механизма 30 деления/объединения мощности. Ось S указывает число оборотов солнечной шестерни 31, которое равно числу оборотов Nm1 мотора MG1, ось C указывает число оборотов опоры 34, которое равно числу оборотов Ne двигателя 22, и ось R указывает число оборотов Nr коронной шестерни 32 (вала 32a коронной шестерни). Уравнение (1) можно легко вывести из коллинеарного вида.
Одна из двух толстых стрелок на оси R указывает крутящий момент, который выводится на вал 32a коронной шестерни, в крутящем моменте Te*, который выводится из двигателя 22, когда двигатель 22 нормально работает в рабочей точке, в которой достигаются конечное число оборотов Ne* и конечный крутящий момент Te* для двигателя 22. Другая толстая стрелка на оси R указывает крутящий момент, который применяется к валу 32a коронной шестерни через коробку 60 передач, в крутящем моменте Tm2*, выводимом из мотора MG2. Уравнение (2) используется для регулировки в режиме обратной связи для вращения мотора MG1 на конечном числе оборотов Nm1*. В уравнении (2) "k1" во втором члене в правой стороне представляет собой коэффициент усиления в пропорциональном члене и "k2" в третьем члене в правой стороне представляет собой коэффициент усиления в интегральном члене:


После вычисления конечного числа оборотов Nm1* и командного значения крутящего момента Tm1* для мотора MG1 предельные значения крутящего момента Tmin, Tmax, которые являются нижним и верхним пределами крутящего момента, который может выводиться из мотора MG2, вычисляются согласно нижеприведенным уравнениям (3) и (4), соответственно. В уравнениях (3) и (4) предельные значения крутящего момента Tmin, Tmax вычисляются делением отклонений от входного предела Win и выходного предела Wout для аккумулятора 50 из электрической мощности, потребляемой (генерируемой) мотором MG1, которая вычисляется путем умножения командного значения крутящего момента Tm1* мотора MG1 на текущее число оборотов Nm1 мотора MG1, соответственно, на число оборотов Nm2 мотора MG2 (этап S210). Затем передаточное число Gr, используемое в данный момент коробкой 60 передач, вычисляется делением числа оборотов Nm2 мотора MG2 на число оборотов Nr вала 32a коронной шестерни (этап S220). Временный крутящий момент мотора Tm2tmp, который представляет собой крутящий момент, выводимый из мотора MG2, вычисляется согласно уравнению (5) на основании текущего передаточного числа Gr, необходимого крутящего момента Tr*, командного значения крутящего момента Tm1* и передаточного числа ρ механизма 30 деления/объединения мощности (этап S230). Командное значение крутящего момента Tm2* для мотора MG2 задается равным значению, полученному путем ограничения временного крутящего момента мотора Tm2tmp с использованием предельных значений крутящего момента Tmin, Tmax (этап S240). Задание командного значения крутящего момента Tm2* мотора MG2 позволяет задавать необходимый крутящий момент Te* для вывода на вал 32a коронной шестерни, равным крутящему моменту, ограниченному в пределах между входным пределом Win и выходным пределом Wout для аккумулятора 50. Уравнение (5) можно легко вывести из коллинеарного вида (фиг.8):



После задания конечного числа оборотов Ne* и конечного крутящего момента Te* двигателя 22 и командных значений крутящего момента Tm1*, Tm2* для моторов MG1, MG2 сигналы, указывающие конечное число оборотов Ne* и конечный крутящий момент Te* двигателя 22, передаются на ECU 24 двигателя, и сигналы, указывающие командные значения крутящего момента Tm1*, Tm2* для моторов MG1, MG2, передаются на ECU 40 мотора (этап S250), после чего управление приводом заканчивается.
После приема сигналов, указывающих конечное число оборотов Ne* и конечный крутящий момент Te*, ECU 24 двигателя осуществляет управление двигателем 22, например управление впрыском топлива и управление зажиганием, в результате чего двигатель 22 работает в рабочей точке, в которой достигаются конечное число оборотов Ne* и конечный крутящий момент Te*. После приема сигналов, указывающих командные значения крутящего момента Tm1*, Tm2*, ECU 40 мотора осуществляет управление коммутацией на переключающих элементах инверторов 41, 42, в результате чего мотор MG1 приводится в действие на основании командного значения крутящего момента Tm1* и мотор MG2 приводится в действие на основании командного значения крутящего момента Tm2*.
Если на этапе S180 определено, что двигатель 22 не работает, гибридный ECU 70 задает крутящий момент запуска Tcr для приведения в действие двигателя 22 с использованием мотора MG1, равным командному значению крутящего момента
Tm1* для мотора MG1 (этап S260). Затем гибридный ECU 70 сравнивает число оборотов Ne двигателя 22 с пороговым значением Nref (этап S270). Если число оборотов Ne двигателя 22 меньше или равно пороговому значению Nref, гибридный ECU 70 осуществляет этапы S210 - S250, после чего способ управления приводом заканчивается. С другой стороны, если число оборотов Ne двигателя 22 превышает пороговое значение Nref, гибридный ECU 70 предписывает ECU 24 двигателя осуществлять управление впрыском топлива и управление зажиганием (этап S280) и осуществляет этапы S210-S250, после чего управление приводом заканчивается.
В частности, если двигатель 22 не работает, когда необходимая мощность Pe* больше или равна пороговому значению Pref, двигатель 22 приводится в действие мотором MG1, в то время как сила реакции со стороны вала 32a коронной шестерни генерируется мотором MG2. Крутящий момент запуска Tcr может иметь заранее определенное значение или может даваться на основании числа оборотов Ne двигателя 22 и времени, прошедшего после запуска двигателя 22 мотором MG1. Пороговое значение Nref представляет собой число оборотов двигателя 22, при котором начинаются управление впрыском топлива и управление зажиганием. Пороговое значение Nref можно задать равным, например, 1000 или 1200 об/мин.
Если на этапе S170 определено, что необходимая мощность Pe* меньше порогового значения Pref, гибридный ECU 70 задает конечное число оборотов Ne* и конечный крутящий момент Te* двигателя 22, равными "0", в результате чего двигатель 22 останавливается (этап S290). Затем гибридный ECU 70 задает командное значение крутящего момента Tm1* для мотора MG1, равным "0" (этап S300), и осуществляет этапы S210-S250, после чего управление приводом заканчивается. ECU 24 двигателя принимает сигналы, указывающие, что конечное число оборотов Ne* и конечный крутящий момент Te* равны "0". Когда двигатель 22 не работает, ECU 24 двигателя поддерживает состояние, когда двигатель 22 не работает. С другой стороны, когда двигатель 22 работает, ECU 24 двигателя заглушает двигатель 22.
Если на этапе S130 определено, что команда смены передачи в коробке 60 передач отдана, гибридный ECU 70 определяет, осуществляется ли переключение (этап S150). Если определено, что переключение не осуществляется, гибридный ECU 70 подает команду начала переключения для переключения передачи коробки 60 передач (этап S160). Когда команда начала переключения отдана, гибридный ECU 70 начинает операцию переключения (фиг.9), одновременно осуществляя способ управления приводом (фиг.4). Последовательность операций способа переключения показана на фиг.9.
При переключении CPU 72 гибридного ECU 70 определяет, повышается или понижается передача коробки передач (этап S600). Если определено, что передача коробки передач повышается, тормоз B2 отпускается (этап S610), а тормоз B1 включается (этап S620). Затем гибридный ECU 70 принимает сигнал, указывающий число оборотов Nm2 мотора MG2, и сигнал, указывающий число оборотов Nr вала 32a коронной шестерни, как на этапе S100 способа управления приводом (фиг.4) (этап S630). Затем гибридный ECU 70 определяет, близко ли число оборотов Nm2 мотора MG2 к числу оборотов Nm2* мотора MG2 после переключения (=Nr×Ghi), которые вычисляются путем умножения числа оборотов Nr вала 32a коронной шестерни на передаточное число Ghi в коробке 60 передач на высшей передаче (этапы S640, 650). Если определено, что число оборотов Nm2 мотора MG2 не близко к числу оборотов Nm2* мотора MG2 после переключения, гибридный ECU 70 осуществляет этапы S630-S650, пока число оборотов Nm2 мотора MG2 не приблизится к числу оборотов Nm2* мотора MG2 после операции переключения. Когда число оборотов Nm2 мотора MG2 близко к числу оборотов Nm2* мотора MG2 после операции переключения, тормоз B1 включается полностью (этап S660), после чего переключение заканчивается.
С другой стороны, если определено, что передача коробки передач понижается, тормоз B1 освобождается (этап S670). Гибридный ECU 70 принимает сигнал, указывающий число оборотов Nm2 мотора MG2, и сигнал, указывающий число оборотов Nr вала коронной шестерни 23a (этап S680), и определяет, близко ли число оборотов Nm2 мотора MG2 к числу оборотов Nm2* мотора MG2 после переключения, которое вычисляется путем умножения числа оборотов Nr вала 32a коронной шестерни на передаточное число Glo в коробке 60 передач на низшей передаче (=Nr×Glo) в силу положительного крутящего момента, выводимого из мотора MG2 (этапы S690, S700). Если определено, что число оборотов Nm2 мотора MG2 не близко к числу оборотов Nm2* мотора MG2 после переключения, гибридный ECU 70 осуществляет этапы S680-S700, пока число оборотов Nm2 мотора MG2 не приблизится к числу оборотв Nm2* мотора MG2 после переключения. Когда число оборотов Nm2 мотора MG2 близко к числу оборотов Nm2* мотора MG2, тормоз B2 включается полностью (этап S710), после чего переключение заканчивается.
Согласно вышеописанному синхронное определение производится на основании числа оборотов Nm2 мотора MG2 и числа оборотов Nr вала коронной шестерни 32a для плавного переключения передачи коробки 60 передач. При повышающем переключении коробки передач тормоз B1 включается, и тормоз B2 отпускается. При понижающем переключении коробки передач тормоз B1 отпускается, и тормоз B2 включается.
По завершении переключения на следующем этапе S130 способа управления приводом (фиг.4) производится определение, что команда смены передачи в коробке 60 передач не отдана.
Обратимся вновь к способу управления приводом (фиг.4). Если на этапе S140 определено, что флаг определения освобождения обоих тормозов F3 указывает "1", гибридный ECU 70 определяет, что имеется возможность, что оба тормоза B1, B2 коробки 60 передач отпущены по причине, например, сбоя в гидравлической системе 100. Затем гибридный ECU 70 задает конечное число оборотов Ne*, конечный крутящий момент Te* двигателя 22 и командное значение крутящего момента Tm1* для мотора MG1, как на вышеописанных этапах S190, S200, независимо от необходимой мощности Pe* (этапы S320, S330), задает командное значение крутящего момента Tm2* для мотора MG2, равным "0" (этап S340), передает сигналы, указывающие конечное число оборотов Ne* и конечный крутящий момент Te* для двигателя 22 на ECU 24 двигателя, и сигналы, указывающие командные значение крутящего момента Tm1*, Tm2* для моторов MG1, MG2 на ECU 40 мотора (этап S250), после чего управление приводом заканчивается.
В частности, когда имеется возможность, что оба тормоза B1, B2 коробки 60 передач отпущены, работа двигателя 22 продолжается, и командное значение крутящего момента Tm2* для мотора MG2 задается равным "0".
Нижеследующее описание основано на предположении о том, что оба тормоза B1, B2 отпущены вследствие сбоя в коробке 60 передач, в частности, вращающийся вал 48 мотора MG2 отсоединен от вала коронной шестерни 32a. При запуске двигателя 22, обычно, двигатель 22 приводится в действие мотором MG1, тогда как сила реакции со стороны вала 32a коронной шестерни генерируется мотором MG2, как описано выше. Однако, когда вращающийся вал 48 мотора MG2 отсоединен от вала коронной шестерни 32a, сила реакции со стороны вала 32a коронной шестерни не может генерироваться мотором MG2. Соответственно, если двигатель 22 приводится в действие мотором MG1, могут происходить непредвиденные изменения числа оборотов Nr вала 23a коронной шестерни, которые подвергают автомобиль ударному воздействию. Кроме того, когда вращающийся вал 48 мотора MG2 отсоединен от вала коронной шестерни 32a, если задавать командное значение крутящего момента Tm2 для мотора MG2 таким же образом, как в случае, когда один из тормозов B1, B2 включен, число оборотов Nm2 мотора MG2 может резко возрастать.
Для минимизации такого неудобства согласно варианту осуществления, когда имеется возможность, что оба тормоза B1, B2 коробки 60 передач отпущены, работа двигателя 22 продолжается, и командное значение крутящего момента Tm2* для мотора MG2 задается равным "0". Таким образом, автомобиль может ехать с использованием крутящего момента, выводимого из двигателя 22 через механизм 30 деления/объединения мощности на вал 32a коронной шестерни. В частности, автомобиль едет с использованием крутящего момента, полученного с ограничением необходимого крутящего момента Tr*, который выводится на вал 32a коронной шестерни.
Если на этапе S130 определено, что запрос на смену передачи в коробке 60 передач выдан, число оборотов Nm2 мотора MG2 изменяется согласно операции переключения (фиг.9), в результате чего число оборотов Nm2 мотора MG2 приближается к числу оборотов Nm2* после операции переключения. Таким образом, в способе задания флага определения освобождения обоих тормозов (фиг.5) значение флага определения освобождения обоих тормозов F3 задается равным "1". Однако операция переключения осуществляется в течение, например, 200-400 миллисекунд. Соответственно, согласно варианту осуществления, когда запрос на переключение передачи в коробке 60 передач выдан, этап S150 и последующие этапы осуществляются без проверки значения флага определения освобождения обоих тормозов F3.
Если на этапе S130 определено, что запрос на переключение передачи в коробке 60 передач выдан, значение флага определения освобождения обоих тормозов F3 не нужно задавать в способе задания флага определения освобождения обоих тормозов (фиг.5).
Если на этапе S110 определено, что, по меньшей мере, один из флага определения состояния датчика числа оборотов F1 и флага определения состояния датчика поворотного положения F2 указывает "1", производится определение, что сбой происходит в, по меньшей мере, одном из датчиков 36 числа оборотов и датчиков 44 поворотного положения, в частности, по меньшей мере, одно из числа оборотов Nr вала 32a коронной шестерни и поворотного положения ротора мотора MG2 невозможно определить. Затем, как на вышеописанном этапе S120, необходимый крутящий момент Tr* задается на основании степени использования педали акселератора Ace и скорости V автомобиля, и необходимая мощность Pe* вычисляется путем суммирования значения, полученного путем умножения числа оборотов Nr вала 32a коронной шестерни, вычисленных путем умножения скорости V автомобиля на коэффициент k преобразования, на необходимый крутящий момент Tr*, необходимой мощности заряда/разряда Pb*, необходимой для аккумулятора 50, и потерь Loss (этап S310). Затем осуществляются этапы S320-S340 и этап S250, после чего способ управления приводом заканчивается.
В частности, когда происходит сбой в, по меньшей мере, одном из датчиков 36 числа оборотов и датчиков 44 поворотного положения, работа двигателя 22 продолжается, крутящий момент, выводимый из мотора MG2, ограничивается, и передача коробки 60 передач не переключается.
Причины описаны ниже. Ниже указано, по какой причине работа двигателя 22 продолжается, по какой причине крутящий момент, выводимый из мотора MG2, ограничивается. Когда происходит сбой в, по меньшей мере, одном из датчиков 36 числа оборотов и датчиков 44 поворотного положения, в способе задания флага определения освобождения обоих тормозов (фиг.5), невозможно определить, отпущены ли оба тормоза B1, B2 коробки 60 передач, на основании числа оборотов Nm2 мотора MG2 и числа оборотов Nr вала 32a коронной шестерни.
Если двигатель 22 в это время работает прерывисто, когда двигатель 22 приводится в действие мотором MG1 с отпущенными обоими тормозами B1, B2, могут происходить непредвиденные изменения числа оборотов Nr вала 32a коронной шестерни, и автомобиль может подвергаться удару в силу таких непредвиденных изменений, как описано выше. Если в это время из мотора MG2 выводится большой крутящий момент, когда оба тормоза B1, B2 отпущены, число оборотов Nm2 мотора MG2 может резко возрастать, как описано выше. Для минимизации такого неудобства согласно варианту осуществления, когда происходит сбой в, по меньшей мере, одном из датчиков 36 числа оборотов и датчиков 44 поворотного положения, работа двигателя 22 продолжается, и крутящий момент, выводимый из мотора MG2, ограничивается.
Теперь опишем, по какой причине передача коробки 60 передач не переключается. Когда происходит сбой в, по меньшей мере, одном из датчиков 36 числа оборотов и датчиков 44 поворотного положения, в способе операции переключения (фиг.9), невозможно произвести синхронное определение, близко ли число оборотов Nm2 мотора MG2 к числу оборотов Nm2* мотора MG2 после переключения, на основании числа оборотов Nm2 мотора MG2 и числа оборотов Nr вала 32a коронной шестерни.
Соответственно, если передача коробки 60 передач переключается в этом состоянии, передача коробки 60 передач не может переключаться плавно, и элементы коробки 60 передач, например тормоза B1, B2, могут изнашиваться вследствие внезапного включения одного из тормозов B1, B2. Кроме того, такое внезапное включение одного из тормозов B1, B2 может иметь следствием ударное воздействие на автомобиль. Для минимизации такого неудобства согласно варианту осуществления, когда происходит сбой в, по меньшей мере, одном из датчиков 36 числа оборотов и датчиков 44 поворотного положения, передача коробки 60 передач не переключается.
Когда флаг определения состояния датчика числа оборотов F1 указывает "0", значение, зарегистрированное датчиком 36 числа оборотов, можно использовать как число оборотов Nr вала 32a коронной шестерни на этапе S310.
В гибридном автомобиле 20 согласно вышеописанному варианту осуществления, когда происходит сбой в, по меньшей мере, одном из датчиков 36 числа оборотов и датчиков 44 поворотного положения, передача коробки 60 передач не переключается. Соответственно, можно подавлять износ элементов коробки 60 передач, например тормозов B1, B2, обусловленный переключением передач, когда невозможно произвести синхронное определение плавного переключения передач коробки 60 передач.
В гибридном автомобиле 20 согласно вышеописанному варианту осуществления, когда происходит сбой в, по меньшей мере, одном из датчиков 36 числа оборотов и датчиков 44 поворотного положения, работа двигателя 22 продолжается. Соответственно, можно подавлять непредвиденные изменения числа оборотов Nr вала коронной шестерни 32a, обусловленные запуском двигателя 22 с использованием мотора MG1, когда вращающийся вал 48 мотора MG2 отсоединен от вала 32a коронной шестерни, поскольку невозможно определить, отсоединен ли вращающийся вал 48 мотора MG2 от вала 32a коронной шестерни. Кроме того, можно подавлять ударное воздействие на автомобиль вследствие таких непредвиденных изменений числа оборотов Nr вала 32a коронной шестерни.
В гибридном автомобиле 20 согласно вышеописанному варианту осуществления, когда происходит сбой в, по меньшей мере, одном из датчиков 36 числа оборотов и датчиков 44 поворотного положения, крутящий момент, выводимый из мотора MG2, ограничивается. Соответственно, можно подавлять вывод большого крутящего момента из мотора MG2, который происходит, когда вращающийся вал 48 мотора MG2 отсоединен от вала 32a коронной шестерни, поскольку невозможно определить, отсоединен ли вращающийся вал 48 мотора MG2 от вала 32a коронной шестерни. Кроме того, можно подавлять резкое увеличение числа оборотов Nm2 мотора MG2.
В гибридном автомобиле 20 согласно вышеописанному варианту осуществления, когда происходит сбой в, по меньшей мере, одном из датчиков 36 числа оборотов и датчиков 44 поворотного положения, обеспечиваются продолжение работы двигателя 22, ограничение крутящего момента, выводимого из мотора MG2, и поддержание передачи коробки 60 передач. Альтернативно, можно обеспечить один или два из этих режимов управления.
В гибридном автомобиле 20 согласно вышеописанному варианту осуществления, когда происходит сбой в, по меньшей мере, одном из датчиков 36 числа оборотов и датчиков 44 поворотного положения, работа двигателя 22 продолжается. Альтернативно, состояние, когда двигатель 22 не работает, может продолжаться. В этом случае также можно подавлять ударное воздействие на автомобиль вследствие непредвиденных изменений числа оборотов Nr вала 32a коронной шестерни, которые могут быть обусловлены запуском двигателя 22 с использованием мотора MG1, когда вращающийся вал 48 мотора MG2 отсоединен от вала коронной шестерни 32a.
В гибридном автомобиле согласно вышеописанному варианту осуществления, производится определение, должна ли продолжаться работа двигателя 22, нужно ли ограничивать крутящий момент, выводимый из мотора MG2, и следует ли поддерживать передачу коробки 60 передач, на основании состояний датчика 36 числа оборотов и датчика 44 поворотного положения. Альтернативно, такое определение можно производить на основании состояния одного из датчика 36 числа оборотов и датчика 44 поворотного положения.
В гибридном автомобиле 20 согласно вышеописанному варианту осуществления мощность выводится из мотора MG2 на вал 32a коронной шестерни, в то время как число оборотов мотора MG2 снижается редуктором 35. Альтернативно, как показано в гибридном автомобиле 320 согласно видоизмененному варианту осуществления, показанному на фиг.10, мощность можно выводить из мотора MG2 на мост (мост, подключенный к колесам 39c, 39d, показанный на фиг.10), отличный от моста (моста, подключенного к ведущим колесам 39a, 39b), к которому подключен вал 32a коронной шестерни.
В гибридном автомобиле 20 согласно вышеописанному варианту осуществления мощность от двигателя 22 выводится, через механизм 30 деления/объединения мощности, на вал 32a коронной шестерни, соединенный с ведущими колесами 39a, 39b. Альтернативно, как показано в гибридном автомобиле 220 согласно другому видоизмененному варианту осуществления изобретения, показанному на фиг.11, может быть обеспечен роторный электромотор 230. Роторный электромотор 230 включает в себя внутренний ротор 232, соединенный с коленвалом 26 двигателя 22, и внешний ротор 234, соединенный с ведущим валом, который выводит мощность на ведущие колеса 39a, 39b. Роторный электромотор 230 выводит часть мощности из двигателя на ведущий вал и преобразует оставшуюся мощность в электрическую мощность.
Согласно вышеописанному варианту осуществления изобретения устройство вывода мощности установлено на гибридном автомобиле. Однако такое устройство вывода мощности может быть установлено на других транспортных средствах помимо автомобилей, например на судах и самолетах, или в неподвижном оборудовании, например на строительных машинах. Кроме того, изобретение применимо к устройству вывода мощности, устройству управления для устройства вывода мощности или к способу управления для устройства вывода мощности.
Хотя изобретение было описано со ссылкой на иллюстративный вариант его осуществления, следует понимать, что изобретение не ограничивается иллюстративным вариантом осуществления или иллюстративными конструкциями. Напротив, изобретение охватывает различные модификации и эквивалентные конфигурации. Кроме того, хотя различные изменения иллюстративного варианта осуществления показаны в различных комбинациях и конфигурациях, которые являются иллюстративными, другие комбинации и конфигурации, включающие в себя больше, меньше элементов или только один элемент, также отвечают сущности и объему изобретения.
Реферат
Изобретение относится к устройству вывода мощности, автомобилю, включающему в себя устройство вывода мощности, и модулю и способу управления для устройства вывода мощности. При отсутствии сбоя в блоке (36) определения числа оборотов ведущего вала и блоке (44) определения числа оборотов вращающегося вала осуществляют управление двигателем (22) внутреннего сгорания, устройством (30, MG1) деления мощности, электромотором (MG2) и блоком (60) переключения. При этом изменяют отношение скоростей в блоке (60) переключения, и осуществляется прерывистая работа двигателя (22) внутреннего сгорания, в результате чего мощность привода, необходимая для ведущего вала (32а), выводится на вал (32а). Когда происходит сбой в блоке (36) определения числа оборотов ведущего вала и/или в блоке (44) определения числа оборотов вращающегося вала, осуществляют управление, посредством чего мощность привода, выводится на ведущий вал (32а). Достигается предотвращение износа элементов коробки передач. 4 н. и 6 з.п. ф-лы, 12 ил.
Формула
Документы, цитированные в отчёте о поиске
Гибридный силовой агрегат
Комментарии