Устройство управления и способ управления для гибридного транспортного средства - RU2408483C1
Код документа: RU2408483C1
Чертежи












Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству управления для гибридного транспортного средства, а более конкретно, к устройству управления для гибридного транспортного средства, включающему в себя блок управления (ECU), предусмотренный независимо для каждого электродвигателя.
Предшествующий уровень техники
Устройство управления приведением в действие двигателя, приводящее в движение и управляющее множеством электродвигателей, использовалось в качестве одного типа устройства управления приведением в действие двигателя, применяемого в гибридном транспортном средстве. Международная публикация WO 2003/015254, например, раскрывает на фиг.9 конфигурацию устройства управления приведением в действие двигателя, используемого для гибридного транспортного средства системы с двумя двигателями, включающей в себя электродвигатели M1 и M2.
На Фиг.9 публикации WO 2003/015254 концептуально показано общее устройство управления в качестве устройства управления для приведения в действие и управления электродвигателями M1 и M2. Что касается фактического устройства управления приведением в действие двигателя, если одно устройство управления (например, электронный блок управления, ECU) используется для того, чтобы выполнять операцию управления для обоих электродвигателей M1 и M2, то чрезмерно большая нагрузка по обработке накладывается на ECU и, соответственно, может потребоваться высокопроизводительный ECU.
Следовательно, практическая конфигурация - это конфигурация, включающая в себя устройства управления (ECU), предусмотренные отдельно и независимо для соответствующих электродвигателей так, чтобы каждое устройство управления (ECU) выполняло операцию управления для приведения в действие связанного с ним электродвигателя. Эта конфигурация позволяет выполнить устройство управления без чрезмерной нагрузки по обработке на каждое устройство управления и без чрезмерного требования по скорости обработки устройства управления, а именно без увеличения стоимости каждого устройства управления (ECU).
Тем не менее, в случае если устройства управления (ECU) предусмотрены отдельно и независимо для соответствующих электродвигателей, возникает проблема, когда электродвигатель M1 и электродвигатель M2 управляются совместно. Одним примером этого совместного управления является управление балансом электрической мощности, выполняемое для ограничения, в пределах определенного диапазона, полной входной/выходной электрической мощности в/из множества электродвигателей в целом.
Чтобы быстро выполнять управление балансом электрической мощности, предпочтительно, с точки зрения готовности выполнять, управление путем регулирования баланса электрической мощности посредством одного из множества отдельно предусмотренных устройств управления и ограничения по мере необходимости электрической мощности электродвигателя, связанного с этим устройством управления. Конфигурация управления, тем не менее, может терять синхронизацию между множеством электродвигателей с точки зрения данных и информации, используемой для управления балансом электрической мощности, вследствие влияния времени на связь между устройством управления, выполняющим управление балансом электрической мощности, и другими устройствами управления. Другими словами, распознавание данных и информации задерживается на время, требуемое для связи. Как результат, в частности, в период, в который варьируются выходные показатели электродвигателя (скорость вращения, крутящий момент), нельзя отрицать возможность того, что соответствующее управление балансом электрической мощности невозможно.
Краткое изложение существа изобретения
Настоящее изобретение предназначено для решения указанной выше проблемы.
Задачей настоящего изобретения является обеспечение надлежащего управления балансом электрической мощности посредством устройства управления для гибридного транспортного средства, включающего в себя блоки управления (ECU), предусмотренные отдельно для соответствующих электродвигателей, чтобы ограничивать полную электрическую мощность электродвигателей в пределах заранее определенного диапазона, при этом исключая влияние времени для связи между блоками управления.
Согласно настоящему изобретению предложено устройство управления для гибридного транспортного средства. Гибридное транспортное средство оснащено первым и вторым электродвигателями и устройством накопления энергии, выполненным с возможностью подавать и принимать электрическую мощность в и из первого и второго электродвигателей. Устройство управления включает в себя первый и второй блоки для приведения в действие и управления первым и вторым электродвигателями соответственно, канал связи для обмена данными между первым и вторым блоками управления, блок оценки и блок управления балансом электрической мощности. Блок оценки оценивает входную/выходную электрическую мощность первого электродвигателя одновременно с входной/выходной электрической мощностью второго электродвигателя на основе данных о первом электродвигателе, которые получают посредством первого блока управления и посредством корректировки времени задержки связи в канале связи, когда данные передаются из первого блока управления во второй блок управления. Блок управления балансом электрической мощности ограничивает посредством второго блока управления сумму входной/выходной электрической мощности первого электродвигателя и входной/выходной электрической мощности второго электродвигателя в пределах заранее определенного диапазона с использованием оценки входной/выходной электрической мощности первого электродвигателя, которая определена посредством блока оценки.
Согласно настоящему изобретению предложен также способ управления для гибридного транспортного средства. Гибридное транспортное средство включает в себя первый и второй электродвигатели, устройство накопления энергии, первый и второй блоки управления и канал связи, как описано выше. Способ включает в себя этапы: оценки входной/выходной электрической мощности первого электродвигателя одновременно с входной/выходной электрической мощностью второго электродвигателя на основе данных о первом электродвигателе, которые получают посредством первого блока управления и посредством корректировки времени задержки связи в канале связи, когда данные передаются из первого блока управления во второй блок управления; и ограничения, посредством второго блока управления, суммы входной/выходной электрической мощности первого электродвигателя и входной/выходной электрической мощности второго электродвигателя в пределах заранее определенного диапазона с использованием оценки входной/выходной электрической мощности первого электродвигателя, которая определена на этапе оценки.
Предпочтительно, блок управления балансом электрической мощности включает в себя блок ограничения крутящего момента. Блок ограничения крутящего момента ограничивает выходной крутящий момент второго электродвигателя таким образом, что сумма входной/выходной электрической мощности второго электродвигателя, которая вычислена посредством второго блока управления, и оценки входной/выходной электрической мощности, определенной посредством блока оценки, находится в пределах заранее определенного диапазона. С другой стороны, этап ограничения включает в себя этап, на котором ограничивают выходной крутящий момент второго электродвигателя таким образом, чтобы сумма входной/выходной электрической мощности второго электродвигателя, которая вычислена посредством второго блока управления и оценки входной/выходной электрической мощности, определенной посредством блока оценки, находилась в пределах заранее определенного диапазона.
В устройстве управления для гибридного транспортного средства, один из первого и второго блоков управления, предусмотренных соответственно для первого и второго электродвигателей, может использоваться для того, чтобы быстро выполнять управление балансом электрической мощности для управления полной электрической мощностью электродвигателей и с высокой точностью выполнять управление балансом электрической мощности без влияния временной задержки связи между блоками управления. Соответственно, рабочие характеристики транспортного средства могут быть обеспечены, даже когда происходит зарядка/разрядка и избыточная разрядка устройства накопления энергии.
Также предпочтительно, первый блок управления приводит в действие и управляет первым электродвигателем согласно сглаженному значению уставки крутящего момента, полученному посредством операции сглаживания для сглаживания значения уставки крутящего момента для первого электродвигателя в направлении времени. Блок оценки определяет оценку входной/выходной электрической мощности с использованием оценки значения уставки крутящего момента, определенного посредством сглаживания, в направлении времени, значения уставки крутящего момента первого электродвигателя, определенного посредством постоянной времени, меньшей, чем постоянная времени, используемая в операции сглаживания для получения сглаженного значения уставки крутящего момента. С другой стороны, на этапе оценки определяют оценку входной/выходной электрической мощности с использованием оценки значения уставки крутящего момента, определенной посредством сглаживания, в направлении времени, значения уставки крутящего момента для первого электродвигателя, определенной посредством постоянной времени, меньшей, чем постоянная времени, используемая в операции сглаживания для получения сглаженного значения уставки крутящего момента.
Таким образом, для первого электродвигателя, управляемого посредством первого блока управления, который передает данные во второй блок управления, выполняющий управление балансом электрической мощности, оценка значения уставки крутящего момента может быть определена на основе значения уставки крутящего момента и посредством корректировки времени задержки на связь. Следовательно, второй блок управления может выполнять управление балансом электрической мощности с высокой точностью, поскольку входная/выходная электрическая мощность первого электродвигателя может быть оценена на основе оценки значения уставки крутящего момента со скорректированным временем задержки на связь.
Предпочтительно, на основе коэффициента изменения скорости вращения первого электродвигателя блок оценки оценивает скорость вращения первого электродвигателя во время, когда время задержки на связь уже прошло, и блок оценки осуществляет оценку входной/выходной электрической мощности с использованием оцененной скорости вращения первого электродвигателя. С другой стороны, на основе коэффициента изменения скорости вращения первого электродвигателя на этапе оценки оценивают скорость вращения первого электродвигателя во время, когда время задержки на связь уже прошло, и на этапе оценки определяют оценку входной/выходной электрической мощности с использованием оцененной скорости вращения первого электродвигателя.
Таким образом, даже в состоянии, где скорость вращения первого электродвигателя изменяется, скорость вращения первого электродвигателя может быть оценена посредством осуществления коррекции временной задержки на связь. Таким образом, второй блок управления может выполнять управление балансом электрической мощности с высокой точностью, поскольку входная/выходная электрическая мощность первого электродвигателя может быть оценена на основе оцененной скорости вращения со скорректированной временной задержкой на связь.
Предпочтительно, первый блок управления последовательно вычисляет входную/выходную электрическую мощность первого электродвигателя из крутящего момента и скорости вращения первого электродвигателя. Блок оценки определяет оценку входной/выходной электрической мощности во время, когда время задержки на связь уже прошло, на основе входной/выходной электрической мощности, которая последовательно вычислена, и на основе коэффициента изменения входной/выходной электрической мощности. С другой стороны, на этапе оценки определяют оценку входной/выходной электрической мощности во время, когда время задержки на связь уже прошло, на основе входной/выходной электрической мощности, которая последовательно вычислена, и на основе коэффициента изменения входной/выходной электрической мощности.
Таким образом, даже в состоянии, когда входная/выходная электрическая мощность первого электродвигателя изменяется, входная/выходная электрическая мощность первого электродвигателя может быть оценена со скорректированной временной задержкой на связь. Таким образом, второй блок управления может выполнять управление балансом электрической мощности с высокой точностью, поскольку входная/выходная электрическая мощность первого электродвигателя может быть оценена со скорректированной временной задержкой на связь.
Предпочтительно, первый электродвигатель выполнен с возможностью генерировать электрическую мощность в то время, когда двигатель работает, и второй электродвигатель выполнен с возможностью потреблять электрическую мощность и генерировать мощность движения транспортного средства при работе в режиме движения с потреблением мощности и генерировать электрическую мощность при работе в режиме рекуперативного торможения.
Таким образом, управление балансом электрической мощности может быть выполнено так, что сумма входной/выходной электрической мощности первого электродвигателя, главным образом выступающего в качестве электрогенератора, и второго электродвигателя, главным образом выступающего в качестве электродвигателя, для генерирования мощности приведения в движение транспортного средства поддерживается в пределах заранее определенного диапазона, который задан согласно состоянию устройства накопления энергии. Таким образом, рабочие характеристики транспортного средства могут быть обеспечены, при этом зарядка/разрядка и избыточная разрядка устройства накопления энергии предотвращаются.
Еще предпочтительно, когда блок управления балансом электрической мощности определяет, что рабочее состояние первого электродвигателя изменяется в сторону увеличения электрической мощности, генерируемой посредством первого электродвигателя, блок управления балансом электрической мощности ограничивает сумму входной/выходной электрической мощности первого электродвигателя и входной/выходной электрической мощности второго электродвигателя в пределах заранее определенного диапазона посредством использования входной/выходной электрической мощности первого электродвигателя, распознанного как заключающего в себе время задержки на связь, вместо оценки входной/выходной электрической мощности, определенной посредством блока оценки. С другой стороны, способ управления дополнительно включает в себя этапы, на которых определяют, действительно ли рабочее состояние первого электродвигателя изменяется в сторону увеличения электрической мощности, генерируемой посредством первого электродвигателя, и передают во второй блок управления входной/выходной электрической мощностью первого электродвигателя, распознанной как имеющей время задержки на связь, вместо оценки входной/выходной электрической мощности, определенной на этапе оценки, когда определено, что рабочее состояние первого электродвигателя изменяется в сторону увеличения электрической мощности, генерируемой посредством первого электродвигателя. На этапе ограничения ограничивают сумму входной/выходной электрической мощности первого электродвигателя и входной/выходной электрической мощности второго электродвигателя в пределах заранее определенного диапазона посредством использования входной/выходной электрической мощности первого электродвигателя, которая передана во второй блок управления.
В частности, с помощью блока управления балансом электрической мощности или на этапе определения определяют, что рабочее состояние первого электродвигателя изменяется в сторону увеличения электрической мощности, генерируемой посредством первого электродвигателя, когда абсолютное значение значения уставки крутящего момента изменяется в сторону увеличения, в то время когда первый электродвигатель генерирует электрическую мощность. Альтернативно, с помощью блока управления балансом электрической мощности или на этапе определения определяют, что рабочее состояние первого электродвигателя изменяется в сторону увеличения электрической мощности, генерируемой посредством первого электродвигателя, когда абсолютное значение скорости вращения изменяется в сторону увеличения, в то время когда первый электродвигатель генерирует электрическую мощность. Альтернативно, первый блок управления последовательно вычисляет входную/выходную электрическую мощность первого электродвигателя и с помощью блока управления балансом электрической мощности, или на этапе определения определяют, что рабочее состояние первого электродвигателя изменяется в сторону увеличения электрической мощности, генерируемой посредством первого электродвигателя, когда абсолютное значение вычисленной входной/выходной электрической мощности изменяется в сторону увеличения, в то время когда первый электродвигатель генерирует электрическую мощность.
Таким образом, когда рабочее состояние первого электродвигателя изменяется в сторону увеличения генерируемой электрической мощности, в то время когда первый электродвигатель генерирует электрическую мощность, оценка для корректировки временной задержки на связь может быть прекращена так, что управление балансом электрической мощности может выполняться безопасным способом с точки зрения защиты от избыточной разрядки устройства накопления энергии.
Из вышесказанного следует, что главное преимущество настоящего изобретения состоит в том, что устройство управления для гибридного транспортного средства, выполненное с возможностью включать в себя блоки управления (ECU), предусмотренные отдельно для соответствующих электродвигателей, может надлежащим образом выполнять управление балансом электрической мощности для ограничения полной электрической мощности электродвигателей в пределах заранее определенного диапазона, при этом исключая влияние временной задержки на связь между блоками управления.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительного варианта воплощения со ссылками на сопровождающие чертежи, на которых:
фиг.1 - блок-схема полной конфигурации гибридного транспортного средства, управляемого посредством устройства управления для гибридного транспортного средства согласно варианту осуществления настоящего изобретения;
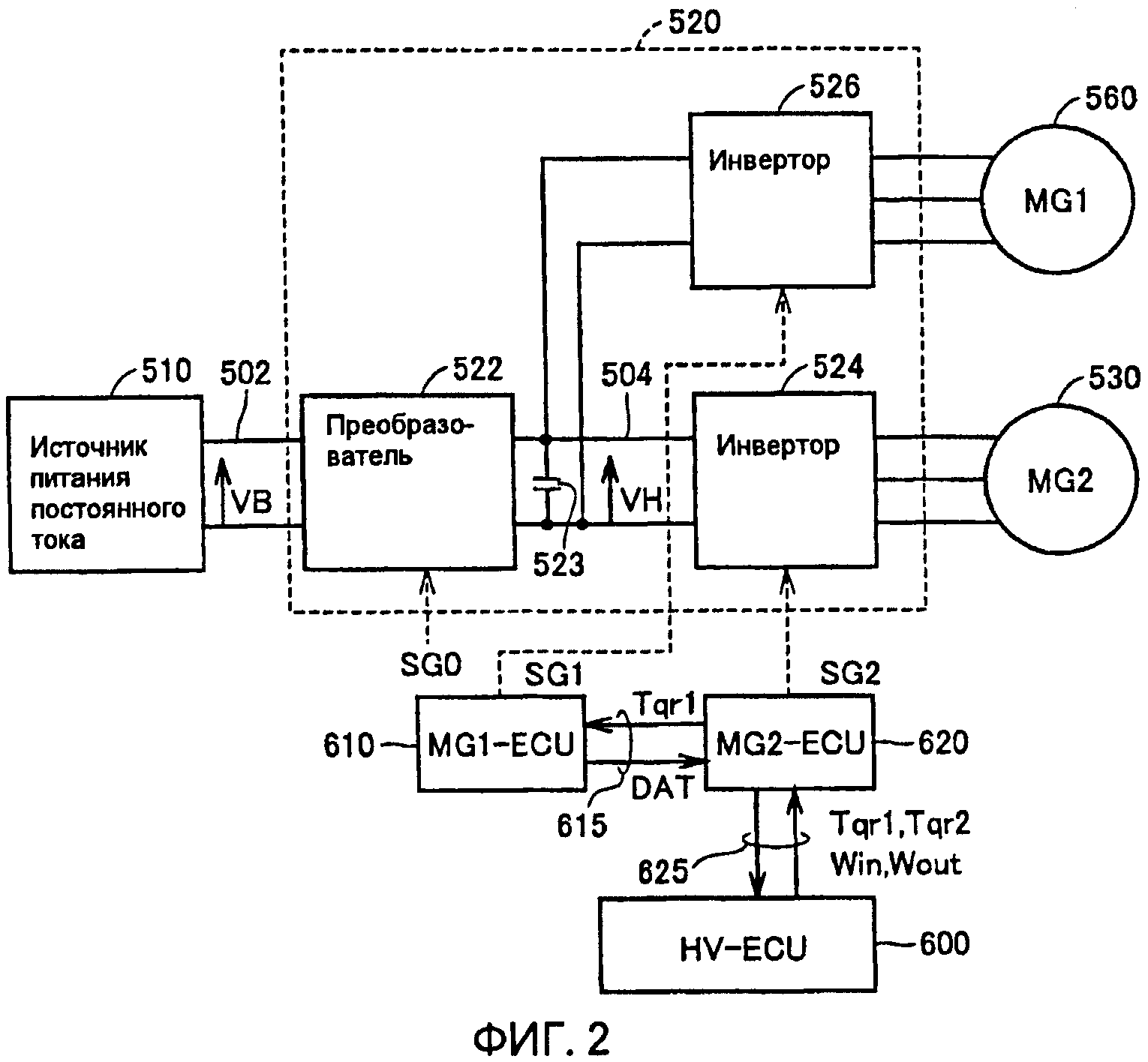
фиг.2 - блок-схема, подробнее иллюстрирующая конфигурацию управления для электродвигателей-генераторов, показанных на фиг.1;
фиг.3 - диаграмма, иллюстрирующая влияние времени задержки на связь, формируемого между ECU при управлении балансом электрической мощности;
фиг.4 - блок-схема, иллюстрирующая управление балансом электрической мощности посредством устройства управления для гибридного транспортного средства согласно варианту осуществления настоящего изобретения;
фиг.5 - диаграмма формы сигнала, иллюстрирующая функцию блока оценки электрической мощности;
фиг.6 - блок-схема последовательности операций способа, иллюстрирующая процесс управления MG1-ECU, касающийся управления балансом электрической мощности в варианте осуществления настоящего изобретения;
фиг.7 - блок-схема последовательности операций способа, иллюстрирующая процесс управления MG2-ECU, касающийся управления балансом электрической мощности в варианте осуществления настоящего изобретения;
фиг.8 - диаграмма, иллюстрирующая способ оценки крутящего момента со скорректированным временем задержки на связь;
фиг.9 - диаграмма, иллюстрирующая способ оценки скорости вращения со скорректированным временем задержки на связь;
фиг.10 - диаграмма, иллюстрирующая способ оценки электрической мощности со скорректированным временем задержки на связь;
фиг.11 - диаграмма формы сигнала, иллюстрирующая управление балансом электрической мощности согласно модификации варианта осуществления настоящего изобретения;
фиг.12 - блок-схема последовательности операций способа, иллюстрирующая процесс управления MG1-ECU, касающийся управления балансом электрической мощности согласно модификации варианта осуществления настоящего изобретения;
фиг.13 - диаграмма формы сигнала, показывающая экспериментальный результат, иллюстрирующий эффект управления балансом электрической мощности посредством устройства управления для гибридного транспортного средства согласно варианту осуществления настоящего изобретения.
Описание предпочтительных вариантов осуществления изобретения
Варианты осуществления настоящего изобретения подробно описываются ниже со ссылками на чертежи. На чертежах аналогичные или соответствующие компоненты обозначены посредством аналогичных ссылочных позиций.
Гибридное транспортное средство 500 (фиг.1) содержит источник 510 питания DC (постоянного тока), блок 520 управления электрической мощностью (PCU), выполняющий преобразование электрической мощности для приведения в действие электродвигателя, электродвигатель-генератор 530, главным образом работающий как электродвигатель, двигатель 540, устройство 550 деления мощности, электродвигатель-генератор 560, главным образом работающий как электрогенератор, зубчатый редуктор 570, приводные колеса 580a, 580b и ECU 590, управляющий работой всего гибридного транспортного средства 500.
Электродвигатели-генераторы 530, 560 соответствуют "электродвигателю" настоящего изобретения. Другими словами, в описываемом варианте осуществления использован электродвигатель-генератор, способный работать в качестве как электродвигателя, так и электрогенератора, в качестве одного примера "электродвигателя". Хотя на фиг.1 показано гибридное транспортное средство, в котором только передние колеса являются приводными колесами, гибридное транспортное средство с 4WD (приводом на четыре колеса) может быть выполнено посредством использования электродвигателя для приведения в движение задних колес.
Источник 510 питания постоянного тока выполнен с использованием устройства накопления энергии, такого как заряжаемый вторичный аккумулятор (например, никель-металлогидридный или ионно-литиевый вторичный аккумулятор) или электролитический двухслойный конденсатор. Блок 520 управления электрической мощностью включает в себя инвертор (не показан) для приведения в действие и управления электродвигателем-генератором 530. Инвертор преобразует постоянное напряжение, подаваемое из источника 510 питания постоянного тока, в напряжение AC (переменного тока) для приведения в действие электродвигателя-генератора 530. Дополнительно, инвертор выполнен с возможностью осуществлять двунаправленное преобразование электрической мощности, а также имеет возможность преобразования электрической мощности (напряжения переменного тока), генерируемой посредством рекуперативного торможения электродвигателя-генератора 530, в постоянное напряжение для зарядки источника 510 питания постоянного тока.
Дополнительно, блок 520 управления электрической мощностью также может включать в себя повышающе-понижающий преобразователь (не показан), выполняющий преобразование уровня постоянного напряжения. Этот повышающе-понижающий преобразователь может быть предусмотрен для приведения в действие электродвигателя-генератора 530 посредством напряжения переменного тока, имеющего амплитуду более высокого напряжения, чем напряжение питания источника 510 питания постоянного тока, и, таким образом, КПД электродвигателя может быть повышен.
Двигатель 540 сжигает топливо, чтобы выводить мощность приведения в движение. Устройство 550 деления мощности соединено с двигателем 540, электродвигателем-генератором 530 и электродвигателем-генератором 560 и разделяет механическую энергию между ними. Другими словами, мощность приведения в движение, генерируемая посредством двигателя 540, может быть разделена между направлением для передачи мощности через зубчатый редуктор 570 на приводные колеса 580a, 580b и направлением для передачи мощности в электродвигатель-генератор 560.
В качестве устройства 550 деления мощности, например, может использоваться система планетарной передачи, которая имеет три вращающихся вала для солнечной шестерни, водила планетарной передачи и коронной шестерни. Три вращающихся вала соединены с соответствующими вращающимися валами двигателя 540, электродвигателем-генератором 530 и электродвигателем-генератором 560. Например, электродвигатель-генератор 560 может быть оснащен полым ротором, имеющим центральную часть, через которую проходит коленчатый вал двигателя 540, так что двигатель 540, электродвигатель-генератор 530 и электродвигатель-генератор 560 могут быть механически соединены с устройством 550 деления мощности. В частности, ротор электродвигателя-генератора 560 соединен с солнечной шестерней, коленчатый вал двигателя 540 соединен с водилом планетарной передачи, а выходной вал 555 соединен с коронной шестерней. Вращение выходного вала 555 передается через зубчатый редуктор 570 на приводные колеса 580a, 580b.
Таким образом, электродвигатель-генератор 560 вращается посредством мощности приведения в движение от двигателя 540, которая передается через устройство 550 деления мощности, для того, чтобы генерировать электрическую мощность. Блок 520 управления электрической мощностью дополнительно включает в себя другой инвертор (не показан) для приведения в действие и управления электродвигателем-генератором 560. Этот инвертор преобразует электрическую мощность (напряжение переменного тока), генерируемую посредством электродвигателя-генератора 560, в постоянное напряжение, используемое в качестве электрической энергии для зарядки источника 510 питания постоянного тока или электрической энергии для приведения в действие электродвигателя-генератора 530. Дополнительно, этот инвертор может быть выполнен с возможностью осуществлять двунаправленное преобразование электрической мощности, и постоянное напряжение от источника 510 питания постоянного тока может использоваться для того, чтобы давать возможность электродвигателю-генератору 560 работать как электродвигатель для двигателя 540 так, что двигатель 540 может запускаться.
Электродвигатель-генератор 530 вращается и приводится в действие посредством напряжения переменного тока, подаваемого из блока 520 управления электрической мощностью, и результирующая мощность приведения в движение передается через выходной вал 555 и зубчатый редуктор 570 на приводные колеса 580a, 580b и используется в качестве мощности приведения в движение транспортного средства. Дополнительно, в режиме рекуперативного торможения, при котором электродвигатель-генератор 530 вращается по мере того, как приводные колеса 580a, 580b замедляются, электродвигатель-генератор 530 выступает в качестве электрогенератора.
Когда гибридное транспортное средство 500 находится в состоянии малой нагрузки, таком как состояние, когда транспортное средство начинает движение, транспортное средство движется на низкой скорости или спускается по некрутому уклону, гибридное транспортное средство двигается с помощью мощности приведения в движение от электродвигателя-генератора 530 без использования мощности приведения в движение от двигателя 540 так, чтобы исключать область низкого КПД двигателя. В этом случае работа двигателя 540 прекращается, если только не требуется операция прогрева или электродвигатель-генератор 560 не должен быть приведен в движение для того, чтобы заряжать источник 510 питания постоянного тока. Когда требуется такая операция прогрева или зарядка, двигатель 540 работает в режиме холостого хода.
В нормальном режиме движения двигатель 540 запускается и мощность приведения в движение, которая выводится из двигателя 540, разделяется посредством устройства 550 деления мощности на мощность приведения в движение для приводных колес 580a, 580b и мощность приведения в движение для генерирования электрической мощности посредством электродвигателя-генератора 560. Электрическая мощность, генерируемая посредством электродвигателя-генератора 560, используется для того, чтобы приводить в движение электродвигатель-генератор 530. Таким образом, в нормальном режиме эксплуатации мощность приведения в движение от электродвигателя-генератора 530 помогает мощности приведения в движение от двигателя 540 приводить в движение приводные колеса 580a, 580b. Дополнительно, в режиме ускорения с полным газом электрическая мощность, подаваемая из источника 510 питания постоянного тока, дополнительно используется для приведения в движение электродвигателя-генератора 530 так, чтобы дополнительно увеличивалась мощность для приведения в движение приводных колес 580a, 580b.
В состоянии замедления и торможения электродвигатель-генератор 530 вращается и приводится в движение посредством приводных колес 580a, 580b так, чтобы генерировать электрическую мощность. Электрическая мощность, собираемая посредством генерирования рекуперативной мощности электродвигателя-генератора 530, преобразуется в постоянное напряжение посредством блока 520 управления электрической мощностью и используется для зарядки источника 510 питания постоянного тока. Когда транспортное средство останавливается, двигатель 540 автоматически останавливается.
Как описано выше, гибридное транспортное средство 500 использует комбинацию мощности приведения в движение, генерируемой посредством двигателя 540, и мощности приведения в движение, генерируемой посредством электродвигателя-генератора 530 из электрической мощности, в частности управляет работой двигателя 540 и работой электродвигателя-генератора 530 согласно режиму работы транспортного средства и тем самым приводит в движение транспортное средство при более экономичном расходе топлива. Гибридный ECU 590 управляет соотношением между мощностью приведения в движение, которая должна генерироваться посредством электродвигателя-генератора 530, и мощностью приведения в движение, которая должна генерироваться посредством двигателя 540, согласно режиму работы транспортного средства и на основе операционной команды (например, положения педали акселератора, операции торможения).
На фиг.2 показана блок-схема, подробнее иллюстрирующая конфигурацию управления для электродвигателя-генератора 530 (MG2) и электродвигателя-генератора 560 (MG1).
Заряжаемый источник 510 (фиг.2) питания постоянного тока выводит постоянное напряжение VB в линию питания 502. Блок 520 управления электрической мощностью включает в себя преобразователь 522, сглаживающий конденсатор 523 и инверторы 524, 526. Работа преобразователя 522 и инверторов 524, 526 в блоке 520 управления электрической мощностью управляется соответственно посредством MG2-ECU 620 и MG1-ECU 610, предусмотренных отдельно для соответствующих электродвигателей-генераторов.
Преобразователь 522 является повышающе-понижающим преобразователем, способным выполнять двунаправленное преобразование напряжения, который сконфигурирован так, чтобы включать в себя электрический полупроводниковый переключающий элемент (не показан), такой как IGBT (биполярный транзистор с изолированным затвором), мощный электрический транзистор на MOS (структура металл-оксид-полупроводник) или электрический биполярный транзистор. Преобразователь 522 управляется переключением в ответ на переключающий управляющий сигнал SG0, чтобы повышать постоянное напряжение VB из линии питания 502, чтобы предоставлять постоянное напряжение VH в линию 504 питания. Преобразователь 522 также может управляться переключением в ответ на переключающий управляющий сигнал SG0 для понижения постоянного напряжения VH линии 504 питания, чтобы выводить постоянное напряжение VB в линию питания 502. Коэффициент преобразования напряжения (коэффициент повышения или коэффициент понижения) преобразователя 522 переменно управляется посредством переключающего управляющего сигнала SG0.
Электродвигатель-генератор 530 (MG2) и электродвигатель-генератор 560 (MG1) выполнены типично в виде трехфазного синхронного электродвигателя, включающего в себя статор (не показан), на котором предусмотрены трехфазные катушечные обмотки, и ротор (не показан) и служащего в качестве электродвигателя-генератора, имеющего функции как электродвигателя, так и электрогенератора.
Инверторы 524, 526 - это стандартно применяемые трехфазные инверторы, выполненные с помощью электрического полупроводникового переключающего элемента. Подробное описание их конфигурации не приводится.
Инвертор 524 преобразует напряжение VH постоянного тока, подаваемое из линии 504 питания, в трехфазное напряжение переменного тока посредством двухпозиционного регулирования (управления переключением) электрических полупроводниковых переключающих элементов (не показаны) в ответ на переключающий управляющий сигнал SG2 от MG2-ECU 620, и инвертор может выводить преобразованное трехфазное напряжение переменного тока в электродвигатель-генератор 530 (MG2). Соответственно, электродвигатель-генератор 530 приводится в действие и управляется так, чтобы генерировать выходной крутящий момент согласно значению уставки крутящего момента.
Дополнительно, в режиме рекуперативного торможения гибридного транспортного средства 500 электродвигатель-генератор 530 принимает вращательное усилие от колес 580a, 580b, чтобы генерировать трехфазное напряжение переменного тока, и инвертор 524 может преобразовывать трехфазное напряжение переменного тока в напряжение постоянного тока согласно управлению переключением в соответствии с переключающим управляющим сигналом SG2, чтобы выводить преобразованное напряжение постоянного тока в линию 504 питания. Таким образом, инвертор 524 выполняет двунаправленное преобразование электрической мощности для MG2 (электродвигателя-генератора 530).
Рекуперативное торможение в данном случае включает в себя торможение, сопровождаемое генерированием рекуперативной мощности, которое осуществляется, когда водитель гибридного транспортного средства нажимает на ножной тормоз, а также замедление (или прекращение ускорения) транспортного средства, сопровождаемое генерированием рекуперативной мощности, которое осуществляется, когда водитель отпускает педаль акселератора без оперирования ножным тормозом.
Инвертор 526 может управляться переключением в ответ на переключающий управляющий сигнал SG1 от MG1-ECU 610, чтобы давать возможность электродвигателю-генератору 560 генерировать выходной крутящий момент согласно значению уставки крутящего момента. Дополнительно, в случае если электродвигатель-генератор 560 приводит в действие двигатель 540, чтобы генерировать электрическую мощность, инвертор 526 управляется переключением в ответ на переключающий управляющий сигнал SG1, чтобы преобразовывать трехфазное напряжение переменного тока, генерируемое посредством электродвигателя-генератора 560, в напряжение постоянного тока и выводить преобразованное напряжение постоянного тока в линию 504 питания. Таким образом, инвертор 526 выполняет двунаправленное преобразование электрической мощности для MG1 (электродвигателя-генератора 560).
ECU 590, показанный на фиг.1, имеет иерархическую структуру, включающую в себя HV-ECU 600 в качестве ECU более высокого ранга и MG1-ECU 610 и MG2-ECU 620, предусмотренные независимо для соответствующих MG1 и MG2.
HV-ECU 600 формирует значения Tqr1, Tqr2 уставки крутящего момента для MG1, MG2 на основе операционной команды (такой, как команда ускорения, команда торможения) и согласно режиму работы транспортного средства.
HV-ECU 600 также формирует значение команды для напряжения VH постоянного тока так, что MG1 и MG2 могут приводиться в действие в оптимальном состоянии согласно рабочим состояниям MG1 и MG2, которые передаются через канал 625 связи. Эти операционные команды передаются через канал 625 связи в MG2-ECU 620. Между MG2-ECU 620 и MG1-ECU 610 дополнительно предоставляется канал 615 связи. Как правило, каналы 615, 625 связи выполнены с использованием беспроводной и/или проводной LAN (локальной сети). Таким образом, данные, информация и т.п. могут передаваться и приниматься между HV-ECU 600, MG1-ECU 610 и MG2-ECU 620. В примерной конфигурации по фиг.2 канал связи может быть дополнительно предоставлен между HV-ECU 600 и MG1-ECU 610.
Преобразователь 522 работает в ответ на переключающий управляющий сигнал SG0, чтобы выводить выходное напряжение согласно значению сигнала управления напряжением для напряжения VH постоянного тока, которое задано посредством HV-ECU 600 или MG1-ECU 610 или MG2-ECU 620. MG1-ECU 610 и MG2-ECU 620 генерируют переключающие управляющие сигналы SG1, SG2 так, чтобы операционное управление (управление электродвигателем) для MG1 и MG2 выполнялось согласно значению операционной команды от HV-ECU 600. Другими словами, преобразование напряжения постоянного тока в напряжение переменного тока инверторов 524, 526 управляется так, что MG1, MG2 выводят выходной крутящий момент согласно значению уставки крутящего момента.
Дополнительно, гибридное транспортное средство 500 выполнено с возможностью поддерживать баланс электрической мощности таким образом, что входная/выходная электрическая мощность источника 510 питания постоянного тока компенсировала излишек или недостаток электрической мощности электродвигателей-генераторов MG1, MG2 в целом, что является суммой входной/выходной электрической мощности MG1, который в основном работает как электрогенератор (входная/выходная электрическая мощность также упоминается как электрическая мощность MG1 в дальнейшем), и входной/выходной электрической мощности MG2, который в основном работает как электродвигатель для генерирования мощности приведения в движение транспортного средства (входная/выходная электрическая мощность также упоминается как электрическая мощность MG2 в дальнейшем). В последующем описании электрическая мощность MG1 и электрическая мощность MG2 представляются посредством положительного значения (>0), когда электрическая мощность потребляется, и представляются посредством отрицательного значения (<0), когда электрическая мощность генерируется.
В гибридном транспортном средстве 500, когда электрическая мощность, потребляемая посредством MG2, внезапно увеличивается вследствие возникновения заноса и т.п., увеличение электрической мощности, генерируемой посредством MG1, может быть недостаточным, и, соответственно, электрическая мощность может быть внезапно получена из источника 510 питания постоянного тока, что может негативно воздействовать на срок службы источника 510 питания постоянного тока.
Следовательно, в гибридном транспортном средстве 500 допустимая выходная электрическая мощность Wout (>0), представляющая допустимое значение выходной электрической мощности из источника 510 питания постоянного тока, и допустимая входная электрическая мощность Win (<0), представляющая допустимое значение входной электрической мощности (электрической мощности зарядки) в источник 510 питания постоянного тока, последовательно задаются согласно состоянию источника 510 питания постоянного тока (такому, как, например, состояние зарядки: SOC и температура аккумулятора), и управление балансом электрической мощности выполняется на основе заданной допустимой входной электрической мощности Win и допустимой выходной электрической мощности Wout и согласно формуле (1), приведенной ниже:

В формуле (1) Pm1 - это электрическая мощность MG1, а Pm2 - это электрическая мощность MG2. Фактически предпочтительно учитывать потерю Ploss, генерируемую в инверторах 524, 526 и электродвигателях-генераторах MG1, MG2, и выполнять управление балансом электрической мощности так, чтобы (Pm1+Pm2+Ploss) было в диапазоне Win-Wout. Для удобства описания в дальнейшем предполагается, что управление балансом электрической мощности выполняется согласно формуле (1).
При вышеописанном управлении баланс электрической мощности Pm1+Pm2 последовательно отслеживается, и, когда Pm1+Pm2 выходит из диапазона Win-Wout, вводится ограничение посредством корректировки, по меньшей мере, одного из Pm1 и Pm2 так, чтобы потребляемая электрическая мощность или генерируемая электрическая мощность электродвигателей-генераторов в целом не была чрезмерно большой. Таким образом, чтобы немедленно осуществлять управление балансом электрической мощности, предпочтительно выполнять управление балансом электрической мощности посредством ECU, который непосредственно управляет электродвигателями-генераторами, а именно посредством MG1-ECU 610 или MG2-ECU 620, а не посредством HV-ECU 600.
В настоящем варианте осуществления необходимо ограничивать электрическую мощность электродвигателя-генератора MG2, который в основном работает как электродвигатель для приведения в движение транспортного средства и, соответственно, потребляет электрическую мощность. Следовательно, будет представлена конфигурация управления для выполнения управления балансом электрической мощности посредством MG2-ECU 620.
MG2-ECU 620 передает в MG1-ECU 610 значение Tqr1 уставки крутящего момента из HV-ECU 600. MG1-ECU 610 генерирует переключающий управляющий сигнал SG1 для выполнения управления переключением инвертора 526, так что MG1 генерирует выходной крутящий момент согласно передаваемому значению Tqr1 уставки крутящего момента.
MG1-ECU 610 последовательно передает в MG2-ECU 620 данные DAT для распознавания электрической мощности Pm1 MG1. MG2-ECU 620 имеет возможность корректирования значения Tqr2 уставки крутящего момента по мере необходимости так, чтобы сумма электрической мощности Pm2 MG2, полученной на основе рабочего состояния (типично значения уставки крутящего момента и скорости вращения) MG2, и электрической мощности Pm1 MG1, распознаваемой на основе данных, принимаемых от MG1-ECU 610, удовлетворяла формуле (1).
В частности, MG2-ECU 620 выполняет управление балансом электрической мощности посредством задания верхнего предела T2max (сторона Wout) и нижнего предела T2min (сторона Win) значения уставки крутящего момента для MG2 согласно следующим формулам (2) и (3) и ограничения фактического значения уставки крутящего момента в пределах диапазона T2min-T2max. В формулах (2) и (3) Nm2 представляет скорость вращения (об/мин) MG2.


Далее, влияние времени задержки на связь, формируемого между ECU при управлении балансом электрической мощности, выполняемом посредством MG2-ECU 620, описывается со ссылкой на фиг.3.
В то время когда электрическая мощность Pm1 MG1 изменяется, электрическая мощность Pm1 MG1 во время ta распознается посредством MG2-ECU 620 во время tb, а именно после времени Tcm задержки на связь со времени ta, и используется для управления балансом электрической мощности во время tb.
Фактическая электрическая мощность MG1, тем не менее, изменилась на ΔP во время tb относительно электрической мощности MG1 во время ta. Следовательно, выполняется управление балансом электрической мощности во время tb, включающее в себя погрешность ΔP электрической мощности Pm1 MG1. В частности, в последние годы выходная мощность гибридного транспортного средства увеличилась и началось использование конфигурации, включающей в себя зубчатый редуктор между MG2 для приведения транспортного средства и выходным валом. В таком гибридном транспортном средстве выходная мощность транспортного средства за единицу времени резко изменяется, и, соответственно, изменение за единицу времени электрической мощности Pm1 MG1 и электрической мощности Pm2 MG2 больше.
Как результат, изменение Pm1, Pm2 во время Tcm задержки связи между ECU больше, и тем самым ΔP на фиг.3 больше. Следовательно, возникает проблема, связанная с ухудшением точности управления балансом электрической мощности по формуле (1).
Чтобы разрешить эту проблему, устройство управления для гибридного транспортного средства согласно варианту осуществления настоящего изобретения выполняет следующее управление балансом электрической мощности.
На фиг.4 показана блок-схема, иллюстрирующая управление балансом электрической мощности посредством устройства управления для гибридного транспортного средства согласно варианту осуществления настоящего изобретения.
Блок 650 оценки электрической мощности формирует оценку Pm1e электрической мощности Pm1 MG1 на основе крутящего момента и скорости вращения MG1. Блок 660 управления балансом электрической мощности выполняет управление балансом электрической мощности, проиллюстрированное формулами (1)-(3), на основе крутящего момента и скорости вращения MG2, допустимой входной электрической мощности Win и допустимой выходной электрической мощности Wout источника 510 питания постоянного тока. В частности, блок 660 управления балансом электрической мощности включает в себя блок 665 ограничения крутящего момента, формирующий конечное значение Tqr2# уставки крутящего момента для MG2 так, что значение уставки крутящего момента для MG2 ограничивается в пределах диапазона T2min-T2max, определенного посредством формул (2) и (3) по мере необходимости, на основе управления балансом электрической мощности.
На фиг.5 показаны диаграммы изменения крутящего момента MG1 и электрической мощности MG1 в то время, когда скорость вращения MG1 является постоянной, чтобы иллюстрировать функцию блока 650 оценки электрической мощности.
Фактическое значение Tqr1# уставки крутящего момента MG1 получается посредством сглаживания в направлении времени, значения Tqr1 уставки крутящего момента из HV-ECU 600. А именно, значение Tqr1# уставки крутящего момента соответствует "сглаженному значению уставки крутящего момента".
В примере на фиг.5, где скорость вращения MG1 является константой, по мере того как значение Tqr1 уставки крутящего момента уменьшается ступенчатым образом от нуля, отрицательный крутящий момент MG1 увеличивается согласно значению Tqr1# уставки крутящего момента. Соответственно, увеличивается электрическая мощность, генерируемая посредством MG1, и постепенно увеличивается абсолютное значение электрической мощности Pm1 MG1.
Тем не менее, в случае если MG2-ECU 620 выполняет управление балансом электрической мощности на основе фактического значения Tqr1# уставки крутящего момента или электрической мощности Pm1 MG1, электрической мощностью MG1, распознанной посредством MG2-ECU 620, является Pm1T, показанная пунктирной линией вследствие влияния времени Tcm задержки на связь. Как результат, в процессе, когда электрическая мощность, генерируемая посредством MG1, увеличивается, управление балансом электрической мощности выполняется с использованием недооцененного количества электрической мощности, генерируемой посредством MG1.
Таким образом, полная электрическая мощность MG1 и MG2 может быть недостаточной относительно допустимой выходной электрической мощности Wout. Соответственно, выходная электрическая мощность MG2, а именно генерирование мощности привода транспортного средства, может быть чрезмерно ограничена, и рабочие характеристики транспортного средства не могут быть использованы в достаточной степени.
Напротив, в процессе, когда электрическая мощность, генерируемая посредством MG1, уменьшается, значение Tqr1 уставки крутящего момента увеличивается ступенчатым способом к нулю, и, соответственно, фактическое значение Tqr1# уставки крутящего момента сглаживается и изменяется к нулю. В этом случае также электрической мощностью MG1, распознанной посредством MG2-ECU 620, является Pm1T, показанная пунктирной линией, вследствие влияния времени Tcm задержки на связь. Следовательно, в этом процессе электрическая мощность, генерируемая посредством MG1, распознается как чрезмерно большая. Полная электрическая мощность MG1 и MG2, таким образом, превышает допустимую выходную электрическую мощность Wout, и может возникать чрезмерная разрядка источника 510 питания постоянного тока. В частности, в процессе, когда электрическая мощность Pm1 MG1 постепенно увеличивается, непрерывно формируется погрешность ΔP электрической мощности (фиг.3), при этом выходная электрическая мощность из источника 510 питания постоянного тока непрерывно является чрезмерно большой. Таким образом, на срок службы источника питания постоянного тока может быть оказано негативно влияние.
Следовательно, в описываемом варианте осуществления блок 650 оценки электрической мощности генерирует оценку Pm1e электрической мощности со скорректированным временем Tcm задержки на связь, и Pm1e используется в качестве Pm1 в формуле (1). Таким образом, управление балансом электрической мощности выполняется надлежащим образом.
Например, как показано на фиг.5, оценка Tqr1e крутящего момента формируется с задержкой Tcm на связь, скорректированной относительно значения Tqr1# уставки крутящего момента. Согласно этой оценке Tqr1e крутящего момента и скорости вращения Nm1 MG1 (об/мин) оценка Pm1e электрической мощности MG1 со скорректированной задержкой Tcm на связь может быть определена согласно формуле (4) ниже:

Как видно на фиг. 5, оценка Pm1e электрической мощности MG1 используется для управления балансом электрической мощности в то время, когда время Tcm задержки на связь уже прошло, и, таким образом, электрическая мощность MG1, распознанная посредством MG2-ECU 620, является идентичной фактической электрической мощности Pm1 MG1.
На фиг.6 показана блок-схема последовательности операций способа, иллюстрирующая процесс управления MG1-ECU 610, касающийся управления балансом электрической мощности в варианте осуществления настоящего изобретения.
На этапе S100 MG1-ECU 610 принимает значение Tqr1 уставки крутящего момента от ECU более высокого ранга. В примерной конфигурации по фиг.2 значение Tqr уставки крутящего момента формируется посредством HV-ECU 600 и передается по каналам 615, 625 связи через MG2-ECU 620.
MG1-ECU 610 сглаживает в направлении времени значение Tqr1 уставки крутящего момента, принимаемое на этапе S100, чтобы формировать фактическое значение Tqr1# уставки крутящего момента на этапе S110. Дополнительно, на этапе S120, MG1-ECU 610 управляет инвертором 526 так, что MG1 выводит крутящий момент согласно значению Tqr1# уставки крутящего момента как сглаженный.
На этапе S130 MG1-ECU 610 формирует оценку Pm1e электрической мощности MG1 посредством прогнозирования (корректирования) времени Tcm задержки связи и на основе значения уставки крутящего момента и фактической скорости вращения MG1. На этапе S140 MG1-ECU 610 передает оценку Pm1e электрической мощности MG1 для использования при управлении балансом электрической мощности в MG2-ECU 620.
На фиг.7 показана блок-схема последовательности операций способа, показывающая процесс управления MG2-ECU 620 для управления балансом электрической мощности в варианте осуществления настоящего изобретения.
На этапе S200 MG2-ECU 620 принимает значение Tqr2 уставки крутящего момента от HV-ECU 600, который является ECU более высокого ранга, и сглаживает на этапе S210 значение Tqr2 уставки крутящего момента в направлении времени. Дополнительно, MG2-ECU 620 вычисляет на этапе S220 электрическую мощность Pm2 MG2 на основе значения Tqr2 уставки крутящего момента, сглаженного на этапе S210, и фактической скорости Nm2 вращения MG2.
На этапе S230 MG2-ECU 620 получает оценку Pm1e электрической мощности MG1 из MG1-ECU 610. На этапе S240 MG2-ECU 620 определяет, находится ли полная электрическая мощность Pm1e+Pm2, которая является суммой оценки электрической мощности MG1, полученной на S230, и электрической мощности MG2, вычисленной на S220, в пределах диапазона Win-Wout.
Когда соотношение Win≤Pm1e+Pm2≤Wout удовлетворяется (определение - ДА на S240), MG2-ECU 620 использует значение Tqr2 уставки крутящего момента, сглаженное в направлении времени, непосредственно в качестве фактического значения Tqr2# уставки крутящего момента на этапе S250.
Напротив, когда полная электрическая мощность Pm1e+Pm2 выходит из диапазона Win-Wout (определение - НЕТ на S240), MG2-ECU 620 корректирует значение уставки крутящего момента до верхнего предела T2max крутящего момента и нижнего предела T2min крутящего момента, определенного с помощью оценки Pm1e электрической мощности MG1 вместо Pm1 в формулах (2) и (3) на этапе S260. В частности, когда сглаженное значение уставки крутящего момента превышает T2max, фактическое значение уставки крутящего момента задается как Tqr2#=T2max, чтобы накладывать ограничение, чтобы значение уставки крутящего момента, превышающее верхний предел крутящего момента (положительное направление), не формировалось. Аналогично, когда сглаженное значение уставки крутящего момента меньше T2min, фактическое значение уставки крутящего момента задается как Tqr2#=T2min, чтобы накладывать ограничение, чтобы значение уставки крутящего момента, меньшее нижнего предела крутящего момента (отрицательное направление), не формировалось. Таким образом, процесс на S260 соответствует состоянию, когда значение уставки крутящего момента MG2 ограничено, и, соответственно, электрическая мощность Pm2 MG2 корректируется за счет управления балансом электрической мощности согласно формуле (1).
Дополнительно, на этапе S270 MG2-ECU 620 управляет инвертором 524 так, что MG2 формирует выходной крутящий момент согласно значению Tqr2# уставки крутящего момента, которое задано на этапе S250 или S260.
В вышеописанной конфигурации управление балансом электрической мощности выполняется посредством MG2-ECU 620, который может наиболее быстро управлять MG2, электрическая мощность которого ограничена на основе управления балансом электрической мощности, при этом управление балансом электрической мощности может выполняться с высокой точностью без влияния временной задержки, требуемой для связи между ECU. Соответственно, гибридное транспортное средство может управляться с требуемыми рабочими характеристиками, в то время как предотвращаются зарядка/разрядка и избыточная разрядка источника 510 питания постоянного тока, а именно не оказывается негативного влияния на срок службы источника питания постоянного тока (устройства накопления энергии).
Вариант осуществления, касающийся способа получения оценки Pm1e электрической мощности MG1, описан подробнее ниже.
Как указано в формуле (4), электрическая мощность MG1 может быть вычислена как произведение значения уставки крутящего момента и фактической скорости вращения MG1.
Следовательно, как показано на фиг.8, когда фактическое значение Tqr1# уставки крутящего момента определяется посредством сглаживания, в направлении времени, первоначальное значение Tqr1 уставки крутящего момента (ступенчато), задается посредством HV-ECU 600, другой фильтр, постоянная времени которого для сглаживания меньше на время Tcm задержки на связь, чем постоянная времени сглаживающего фильтра, используемого для определения Tqr1#, подготавливается отдельно. Выходной сигнал Tqr1 этого фильтра может использоваться для того, чтобы получать оценку Tqr1e крутящего момента со временем Tcm задержки на связь, скорректированного относительно сглаженного фактического значения Tqr1# уставки крутящего момента. Таким образом, оценка Pm1 электрической мощности MG1 может быть определена с использованием этой оценки Tqr1# крутящего момента, конкретно определенной на основе произведения оценки Tqr1# крутящего момента и фактической скорости Nm1 вращения MG1.
Альтернативно, чтобы разрешить случай, когда скорость вращения MG1 изменяется, оценка скорости вращения со скорректированным временем задержки на связь может быть определена так, как показано на фиг.9.
В то время когда скорость вращения MG1 изменяется, если фактическое значение Nm1 передается как есть из MG1-ECU 610 в MG2-ECU 620, фактическая скорость вращения MG1, отражаемая в управлении балансом электрической мощности, составляет Nm1T (пунктирная линия на чертеже), что заключает в себе время задержки на связь.
Относительно скорости вращения MG1 вместе с фактическим значением Nm1 в это время ускорение при разгоне или замедлении скорости Km1 вращения (об/мин/с) может быть вычислено так, чтобы определять оценку Nm1e скорости вращения MG1, согласно формуле (5), приведенной ниже:

Затем используется оценка Nm1e скорости вращения MG1. В частности, на основе произведения оценки Nm1e скорости вращения MG1 и значения уставки крутящего момента определяется оценка Pm1e электрической мощности MG1. Таким образом, управление балансом электрической мощности может быть достигнуто при одновременном исключении влияния времени задержки на связь даже в то время, когда скорость вращения MG1 изменяется.
Альтернативно, как показано на фиг.10, электрическая мощность Pm1 MG1 может быть последовательно вычислена на основе произведения значения Tqr1# уставки крутящего момента и фактической скорости Nm1 вращения, и может быть выполнено управление балансом электрической мощности на основе вычисленной электрической мощности Pm1 MG1.
В этом случае, если электрическая мощность MG1, Pm1, вычисленная посредством MG1-ECU 610, передается как есть в MG2-ECU 620, электрическая мощность MG1, отражаемая в управлении балансом электрической мощности, составляет Pm1T (пунктирная линия на чертеже), что заключает в себе время задержки на связь.
Следовательно, аналогично оценке фактической скорости Nm1 вращения на фиг.9 ускорение KP1 при разгоне или замедлении (W/s) может быть определено вместе с вычислением электрической мощности Pm1 MG1, так что оценка Pm1e электрической мощности MG1 может быть определена согласно формуле (6), приведенной ниже:

Управление балансом электрической мощности может выполняться согласно определенной таким образом оценке Pm1e электрической мощности MG1, так что управление балансом электрической мощности может выполняться при одновременном исключении влияния времени задержки на связь, даже когда электрическая мощность MG1 изменяется.
Модификация
Как описано выше, когда величина электрической мощности, генерируемой посредством MG1, изменяется в сторону уменьшения, погрешность в управлении балансом электрической мощности вследствие времени задержки на связь приводит к тому, что выходная электрическая мощность из источника 510 питания постоянного тока становится чрезмерно большой. Напротив, когда величина электрической мощности, генерируемой посредством MG1, изменяется в сторону увеличения, погрешность в управлении балансом электрической мощности вследствие задержки на связь обеспечивает безопасность с точки зрения избыточной разрядки источника 510 питания постоянного тока. Таким образом, согласно модификации настоящего варианта осуществления, описанной ниже, управление балансом электрической мощности на основе оценки электрической мощности с учетом вышеописанного времени задержки на связь прекращается, когда генерируемая электрическая мощность MG1 увеличивается, и выполняется, только когда генерируемая электрическая мощность уменьшается.
На фиг.11 схематично показана диаграмма управления балансом электрической мощности согласно модификации варианта осуществления настоящего изобретения.
На фиг.11 показана рабочая конфигурация, в которой MG1 начинает генерирование электрической мощности во время tx, величина генерируемой электрической мощности после этого постепенно уменьшается со времени tz, и генерирование электрической мощности затем заканчивается. В период (от времени tx до времени ty), в который электрическая мощность Pm1 MG1 уменьшается, а именно генерируемая электрическая мощность увеличивается, время Tcm задержки на связь не корректируется и управление балансом электрической мощности выполняется с использованием фактической электрической мощности Pm1 MG1 непосредственно как оценка Pm1e электрической мощности MG1.
Соответственно, управление балансом электрической мощности выполняется на основе электрической мощности Pm1 MG1T, на которую оказывает влияние время задержки на связь. В то время когда генерируемая электрическая мощность увеличивается, величина электрической мощности, генерируемой посредством MG1, распознается как чрезмерно маленькая. Следовательно, управление балансом электрической мощности может выполняться безопасным способом с точки зрения избыточной разрядки источника 510 питания постоянного тока в результате того факта, что полная электрическая мощность MG1 и MG2 превышает допустимую выходную электрическую мощность Wout.
Напротив, в период, в который электрическая мощность Pm1 MG1 увеличивается, а именно генерируемая электрическая мощность уменьшается (после времени tz), оценка Pm1e электрической мощности с временной задержкой Tcm на связь, скорректированной относительно фактической электрической мощности MG1, Pm1 используется для того, чтобы выполнять управление балансом электрической мощности, которое аналогично вышеописанному варианту осуществления. Таким образом, когда величина электрической мощности, генерируемой посредством MG1, уменьшается, уменьшение величины электрической мощности, генерируемой посредством MG1, прогнозируется надлежащим образом, и поэтому может быть точно выполнено управление балансом электрической мощности, чтобы предотвращать избыточную разрядку источника 510 питания постоянного тока.
На фиг.12 показана блок-схема последовательности операций способа, иллюстрирующая процесс управления MG1-ECU для управления балансом электрической мощности согласно модификации варианта осуществления настоящего изобретения.
Что касается управления балансом электрической мощности модификации варианта осуществления, фиг.12 отличается от фиг.6 в том, что MG1-ECU 610 дополнительно выполняет этап S125 и этап S150 в дополнение к этапам, показанным на фиг.6.
На этапе S125 MG1-ECU 610 определяет, увеличивается ли величина электрической мощности, генерируемой посредством MG1. На этапе S125 согласно тому факту, что абсолютное значение для значения Tqr1# уставки крутящего момента увеличивается в то время, когда MG1 генерирует электрическую мощность, может быть определено, что величина электрической мощности, генерируемой посредством MG1, увеличивается. Альтернативно, согласно тому факту, что абсолютное значение скорости вращения MG1 увеличивается в то время, когда MG1 генерирует электрическую мощность, также может быть определено, что величина электрической мощности, генерируемой посредством MG1, увеличивается. Дополнительно, на основе произведения значения Tqr1# уставки крутящего момента и скорости Nm1 вращения MG1 может быть последовательно вычислена электрическая мощность Pm1 MG1, и на основе того, является вычисленная электрическая мощность Pm1 MG1 положительной или отрицательной, а также того, изменяется ли электрическая мощность MG так, чтобы увеличиваться или уменьшаться, также может быть выполнено определение на этапе S125.
Когда величина электрической мощности, генерируемой посредством MG1, не увеличивается (определение - НЕТ в S125), MG1-ECU 610 выполняет этапы S130 и S140, аналогичные этапам на фиг.6, чтобы передавать оценку Pm1e электрической мощности MG1 для использования в управлении балансом электрической мощности в MG2-ECU 620.
Напротив, когда величина электрической мощности, генерируемой посредством MG1, увеличивается (определение - ДА в S125), MG1-ECU 610 передает на этапе S150 электрическую мощность Pm1 MG1, для которой время задержки на связь не учитывается для использования в управлении балансом электрической мощности, в MG2-ECU 620.
Таким образом, в период, в который величина электрической мощности, генерируемой посредством MG1, увеличивается, такой как период от времени tx до времени ty на фиг.11, намеренно выполняется управление балансом электрической мощности, на которое оказывает влияние время задержки на связь. Управление балансом электрической мощности, таким образом, может выполняться безопасным способом с точки зрения избыточной разрядки источника 510 питания постоянного тока.
На фиг.13 показана диаграмма экспериментального результата, иллюстрирующая эффект управления балансом электрической мощности посредством устройства управления для гибридного транспортного средства в варианте осуществления настоящего изобретения.
Как показано на фиг.13, в период, когда управление балансом электрической мощности выполняется согласно варианту осуществления настоящего изобретения, следует понимать, что результат ограничения полной электрической мощности MG1 и MG2, чтобы она была равна или меньше допустимой выходной электрической мощности Wout, является более высоким, чем результат в период, когда это управление не выполняется, а именно выполняется обычное управление балансом электрической мощности без корректировки времени задержки на связь.
Вариант осуществления и его модификация проиллюстрированы в связи с конфигурацией управления, при которой MG1-ECU 610 вычисляет оценку Pm1e электрической мощности MG1 для использования в управлении балансом электрической мощности и передает оценку в MG2-ECU 620. Следует отметить, что оценка Pm1e электрической мощности MG1 также может быть вычислена посредством MG-ECU 620, и в этом случае также могут быть получены результаты, аналогичные описанным выше. В этом случае фактическое значение MG1 последовательно передается от MG1-ECU 610 в MG2-ECU 620 и функция блока 650 оценки электрической мощности, показанного на фиг.4, выполняется посредством MG2-ECU 620. Другими словами, функция блока 650 оценки электрической мощности, показанного на фиг.4, может быть выполнена посредством любого из MG1-ECU 610 и MG2-ECU 620.
Дополнительно, в связи с вышеописанным вариантом осуществления и его модификацией поясняется управление балансом электрической мощности для гибридного транспортного средства, оснащенного двумя электродвигателями-генераторами MG1, MG2. В случае если транспортное средство оснащено большим числом электродвигателей-генераторов (электродвигателей), управление балансом электрической мощности также может быть осуществлено с применением подхода, аналогичного вышеописанному, чтобы исключать влияние времени задержки на связь между ECU, управляющим генераторами, и ECU, выполняющим управление балансом электрической мощности.
Следует понимать, что варианты осуществления, раскрытые в данном документе, приводятся во всех отношениях в качестве иллюстрации, а не в качестве ограничения. Объем настоящего изобретения имеет намерение быть заданным посредством формулы изобретения, а не в соответствии с вышеприведенным описанием и включает в себя все модификации и изменения, эквивалентные по значению и объему формуле изобретения.
Промышленная применимость
Настоящее изобретение может быть использовано для управления гибридным транспортным средством, снабженным множеством электродвигателей, соединенных с общим источником питания.
Реферат
Изобретение относится к способу и устройству управления для гибридного транспортного средства. Устройство содержит первый и второй электродвигатели, устройство накопления энергии, первый и второй блоки управления для управления первым и вторым электродвигателями соответственно, канал связи для обмена данными между первым и вторым блоками управления, блок оценки, блок управления балансом электрической мощности. Блок оценки оценивает входную/выходную электрическую мощность первого электродвигателя одновременно с входной/выходной электрической мощностью второго электродвигателя. Блок управления балансом электрической мощности для ограничения суммы входной/выходной электрической мощности первого и второго электродвигателей в пределах заданного диапазона. Способ управления включает оценку входной/выходной электрической мощности первого электродвигателя одновременно с входной/выходной электрической мощностью второго электродвигателя, ограничение суммы входной/выходной электрической мощности первого электродвигателя и входной/выходной электрической мощности второго электродвигателя в пределах заданного диапазона. Технический результат заключается в повышении эффективности управления балансом электрической мощности. 2 н. и 18 з.п. ф-лы, 13 ил.
Комментарии