Транспортное средство - RU2492068C1
Код документа: RU2492068C1
Чертежи























Описание
Настоящее изобретение относится к транспортному средству, содержащему два электродвигателя, которые могут независимо передавать движущую силу в правый и левый приводные валы, соответственно.
В транспортном средстве, описанном в документе JP-A-11-208304, как показано на фиг.24 и 25, передние колеса LWf, RWf приводят в движение с помощью основного источника 103 привода, такого как двигатель 101 и первый электродвигатель 102, и левое и правое задние колеса LWr, RWr транспортного средства 100 приводят в движение с помощью вторых электродвигателей 104а, 104b, которые представляют собой вспомогательные источники осевого привода, через планетарный зубчатый редуктор 105.
В каждом из вторых электродвигателей 104а, 104b ротор 106 соединен с солнечным зубчатым колесом 105а планетарного зубчатого редуктора 105, и статор 107 соединен с кольцевым зубчатым колесом 105b планетарного зубчатого редуктора 105, и задняя ось 108а или 108b соединена с водилом 105 с. В транспортном средстве 100, раскрыт последовательный режим привода, в котором электроэнергию генерируют в первом электродвигателе 102 от мощности двигателя 101, и транспортное средство приводят в движение с помощью движущих сил вторых электродвигателей 104а, 104b, и параллельный режим привода, при котором передние колеса LWf, RWf приводят в движение с помощью энергии двигателя 101, и задние колеса LWr, RWr приводят в движение с помощью движущих сил вторых электродвигателей 104а, 104b.
В транспортном средстве в соответствии с документом JP-A-11-208304, однако, ротор 106 соединен с солнечным зубчатым колесом 105а планетарного зубчатого редуктора 105, и статор 107 интегрально соединен с кольцевым зубчатом колесом 105b планетарного зубчатого редуктора 105, и, поэтому, возникает проблема, состоящая в том, что вторые электродвигатели 104а, 104b всегда вращаются вместе с задними осями 108а, 108b, и не могут быть отсоединены от задних осей 108а.
В документе JP-A-11-208304 не раскрыта такая конфигурация, в которой, путем использования разности вращения между вторыми электродвигателями 104а, 104b, возникающей при повороте транспортного средства, один из них выполняет силовой привод, и другой выполняет регенерацию.
Изобретение было выполнено с учетом описанной выше проблемы. Задача изобретения состоит в создании транспортного средства, которое может осуществлять управление, в котором один из двух электродвигателей, которые соединены с возможностью отсоединения с правым и левым приводными осями, соответственно, приводят в движение, а другой выполняет регенерацию.
Для решения поставленной задачи транспортное средство по п.1 формулы представляет собой транспортное средство (например, транспортное средство 3 в соответствии с вариантом выполнения, который будет описан ниже), содержащее: два электродвигателя (например, электродвигатели 2А, 2B в варианте выполнения, который будет описан ниже), выполненные с возможностью вывода силового привода в правую и левую ведущие оси, независимо, соответственно (например, оси 10А, 10B в варианте выполнения, который будет описан ниже); планетарные зубчатые редукторы (например, планетарные зубчатые редукторы 12A, 12B в варианте выполнения, который будет описан ниже), расположенные на путях передачи мощности между ведущими осями и электродвигателями; устройство однонаправленной передачи мощности (например, одностороннюю муфту 50 в варианте выполнения, который будет описан ниже), расположенное между первыми элементами вращения (например, кольцевыми зубчатыми колесами 24А, 24B в варианте выполнения, который будет описан ниже) планетарных зубчатых редукторов и кожухом редуктора (например, кожухом 11 редуктора в варианте выполнения, который будет описан ниже), внутри которых размещают планетарные зубчатые редукторы, предназначенные для однонаправленной передачи мощности вращения; тормоз (например, гидравлические тормоза 60А, 60B в варианте выполнения, который будет описан ниже), который соединяет/разъединяет первые вращающиеся элементы и кожух редуктора, и выполненный с возможностью двусторонней передачи вращательной мощности электродвигателей на ведущие оси в соединенном состоянии; устройство оценки состояния движения (например, устройство 46 оценки состояния движения в варианте выполнения, который будет описан ниже), которое выполняет оценку состояния движения транспортного средства; калькулятор крутящего момента (например, калькулятор 47 крутящего момента в варианте выполнения, который будет описан ниже), который рассчитывает крутящие моменты двух электродвигателей; и контроллер (например, контроллер 48 давления масла в варианте выполнения, который будет описан ниже), который управляет тормозом на основе состояние движения транспортного средства, оценка которого была выполнена с помощью устройства оценки состояния движения. Когда транспортное средство движется вперед, и оба электродвигатели обеспечивают движение транспортного средства, контроллер освобождает тормоз. Когда транспортное средство движется вперед, и оба электродвигателя выполняют рекуперативное торможение, контроллер активирует тормоз. Когда транспортное средство движется вперед, и один из двух электродвигателей осуществляет привод транспортного средства, в то время как другой электродвигатель выполняет рекуперативное торможение, контроллер освобождает или активирует тормоза на основе крутящего момента привода в движение упомянутых одного из двух электродвигателей, которые выполняют привод в движение транспортного средства и крутящего момента рекуперативного торможения другого электродвигателя, который выполняет рекуперативное торможение.
В соответствии с изобретением по п.2 формулы, в дополнение к конфигурации по п.1 формулы, когда один из двух электродвигателей приводит в движение транспортное средство, и другой электродвигатель выполняют рекуперативное торможение, и крутящий момент рекуперативного торможения больше, чем крутящий момент привода в движение, контроллер активирует тормоз.
В соответствии с изобретением по п.3 формулы, в дополнение к конфигурации по п.1 или 2, устройство оценки состояния движения выполняет оценку состояния движения транспортного средства на основе скорости транспортного средства, степени открытия акселератора, и угла поворота транспортного средства.
В соответствии с изобретением по п.1 формулы, планетарные зубчатые редукторы расположены на путях передачи мощности между ведущими осями и электродвигателями, и устройство однонаправленной передачи мощности и тормоза расположены между первыми вращательными элементами планетарных зубчатых редукторов и кожухом редуктора. Поэтому, электродвигатели могут быть отсоединены от правого и левого валов, соответственно, и, следовательно, может быть предотвращено их совместное вращение.
Когда транспортное средство движется вперед, и один из двух электродвигателей приводит в движение транспортное средство, в то время как другой электродвигатель выполняет рекуперативное торможение, контроллер отпускает или активирует тормоза на основе крутящего момента силового привода и крутящего момент рекуперативного торможения. Используя разность вращения между двумя электродвигателями во время поворота транспортного средства, поэтому, один из них может выполнять силовой привод, и другой может выполнять регенерацию.
В соответствии с изобретением по п.2 формулы, когда один из двух электродвигателей приводит транспортное средство и другой электродвигатель выполняет регенерацию, и крутящий момент рекуперативного торможения больше, чем крутящий момент силового привода, контроллер включает тормоза.
Когда крутящий момент силового привода больше, не требуется включение тормозов. Когда действует силовой крутящий момент, например, когда выполняют запуск транспортного средства, после этого запускают устройство однонаправленной передачи мощности. Поэтому, в случае, когда тормоза выполнены на основе, например, гидравлических тормозов, надежность запуска транспортного средства может быть улучшена, и ситуации, когда электрический масляный насос работает в режиме высокого давления, в состоянии, когда температура масла низка, может быть предотвращена.
В соответствии с изобретением по п.3 формулы, устройство оценки состояния движения выполняет оценку состояния движения транспортного средства на основе скорости транспортного средства, степени открытия акселератор и угла управления транспортного средства.
Изобретение поясняется чертежами, на которых представлено следующее:
фиг.1 - блок-схема, схематично представляющая конфигурацию гибридного транспортного средства в соответствии с предпочтительным вариантом выполнения транспортного средства;
фиг.2 - блок-схема ECU (электронное управляющее устройство);
фиг.3 - продольный разрез устройства привода, которое установлено на транспортном средстве в соответствии с изобретением;
фиг.4 - привод, показанный на фиг.3 в увеличенном масштабе;
фиг.5 - вид в перспективе, представляющий устройство привода, установленное на раме;
фиг.6 - схема гидравлической цепи гидравлического контроллера в состоянии, когда гидравлические тормоза разъединены;
фиг.7 - схема гидравлической цепи гидравлического контроллера в состоянии, когда гидравлические тормоза включены;
фиг.8 - график, представляющий нагрузочные характеристики электрического масляного насоса;
фиг.9 - коллинеарная диаграмма устройства привода во время остановки транспортного средства;
фиг.10 - коллинеарная диаграмма устройства привода в случае, когда устройство привода выполняет прямое движение с ускорением;
фиг.11 - коллинеарная диаграмма устройства привода в случае, когда устройство привода выполняет прямое движение с замедлением, и электродвигатели остановлены;
фиг.12 - коллинеарная диаграмма устройства привода в случае, когда устройство привода выполняет прямое движение с замедлением, и электродвигатели регенерируют;
фиг.13 - коллинеарная диаграмма устройства привода в случае, когда устройство привода выполняет обратное движение с ускорением;
фиг.14 - коллинеарная диаграмма устройства привода в случае, когда устройство привода выполняет обратное движение с замедлением;
фиг.15 - управление зацеплением, при котором выполняют вспомогательный привод в состоянии, когда правый и левый электродвигатели остановлены, в позиции (а) показана коллинеарная диаграмма во время постоянного движения с высокой скоростью с приводом от двигателя внутреннего сгорания, в позиции (b) представлена коллинеарная диаграмма при синхронизации вращения, и в позиции (с) показана коллинеарная диаграмма при вспомогательном приводе;
фиг.16 - управление зацеплением, при котором выполняют регенерацию в состоянии, когда правый и левый электродвигатели остановлены, в позиции (a) показана коллинеарная диаграмма во время постоянного движения с высокой скоростью с приводом от двигателя внутреннего сгорания, в позиции (b) показана коллинеарная диаграмма при синхронизации вращения, в позиции (c) показана коллинеарная диаграмма при включении гидравлических тормозов, и в позиции (d) показана коллинеарная диаграмма при регенерации;
фиг.17 - вид, представляющий состояние электродвигателей, механизма разъединения, и давление в трубопроводе в состоянии движения транспортного средства;
фиг.18 - временная диаграмма при прямом движении транспортного средства;
фиг.19 - временная диаграмма при движении обратным ходом транспортного средства;
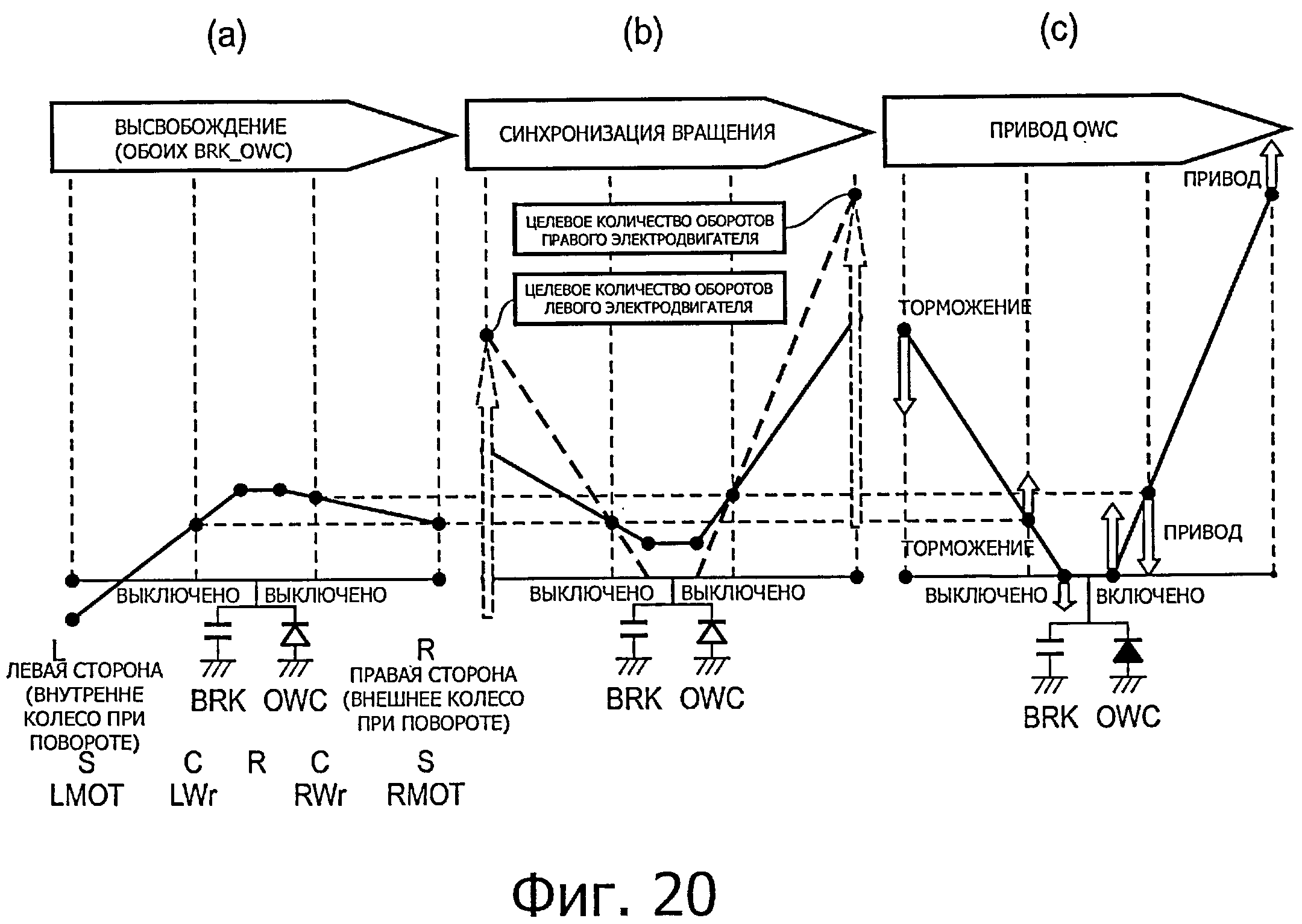
фиг.20 - управление зацеплением, при котором выполняют вспомогательный привод/регенерацию, в состоянии, когда возникает разность вращения между правым и левым электродвигателями при повороте транспортного средства, в позиции (a) показана коллинеарная диаграмма во время поворота, в позиции (b) представлена коллинеарная диаграмма при синхронизации вращения, и в позиции (c) показана коллинеарная диаграмма при вспомогательном приводе/регенерации;
фиг.21 - управление зацеплением, при котором выполняют вспомогательный привод/регенерацию, в состоянии, когда возникает разность вращения между правым и левым электродвигателями при повороте транспортного средства, в позиции (a) показана коллинеарная диаграмма во время поворота, в позиции (b) представлена коллинеарная диаграмма при синхронизации вращения, и в позиции (c) показана коллинеарная диаграмма при включении гидравлических тормозов, и в позиции (d) показана коллинеарная диаграмма при вспомогательном приводе/регенерации;
фиг.22 - блок-схема последовательности операций потока управления устройства гидравлического управления;
фиг.23 - схема характеристики движущей силы электродвигателей устройства привода;
фиг.24 - блок-схема, схематично представляющая конфигурацию транспортного средства, раскрытого в документе JP-A-11-208304;
фиг.25 - вид, иллюстрирующий редуктор планетарного зубчатого колеса, соединенный со вторым электродвигателем по фиг.24.
Вначале будет описан вариант выполнения транспортного средства в соответствии с изобретением.
Транспортное средство 3, показанное на фиг.1, представляет собой гибридное транспортное средство, имеющее модуль 6 привода, в котором двигатель 4 внутреннего сгорания и электродвигатель 5 соединены друг с другом последовательно, расположенный в передней части транспортного средства. Мощность модуля 6 привода передают на передние колеса Wf через передачу 7, и мощность устройства 1 привода, которое расположено отдельно от модуля 6 привода, и в задней части транспортного средства, передают на задние колеса Wr (RWr, LWr). В устройстве 1 привода, электродвигатели 2А, 2B используют, как источник привода для ведущих осей. Электродвигатель 5 модуля 6 привода, и электродвигатели 2А, 2B устройства 1 привода на стороне задних колес Wr соединены с аккумуляторными батареями 9 через PDU 8 (модуль управления мощностью). Таким образом, подачу электроэнергии от аккумуляторной батареи 9 и регенерацию энергии в аккумуляторных батареях 9 выполняют через PDU 8. PDU 8 соединен с ECU 45, который будет описан ниже.
На фиг.3 показан продольный разрез всего устройства 1 привода. На фигуре ссылочной позицией 10А, 10B обозначены правая и левая оси, которые находятся на стороне задних колес Wr транспортного средства, и которые установлены коаксиально в направлении ширины транспортного средства. Кожух 11 редуктора устройства 1 привода выполнен, по существу, цилиндрической формы, в целом. В этом случае, электродвигатели 2А, 2B, предназначенные для привода осей, и планетарные зубчатые редукторы 12А, 12B, которые уменьшают скорости привода электродвигателей 2А, 2B, размещены коаксиально осям 10А, 10B. Электродвигатель 2А и планетарный зубчатый редуктор 12А управляют левым задним колесом LWr, электродвигатель 2B, и планетарный зубчатый редуктор 12B управляют правым задним колесом LWr, и электродвигатель 2А и планетарный зубчатый редуктор 12А, и электродвигатель 2B и планетарный зубчатый редуктор 12B помещены с двух сторон симметрично в направлении ширины транспортного средства, в кожухе 11 редуктора. Как показано на фиг.5, кожух 11 редуктора удерживается участками 13а, 13b держателей элемента 13 рамы, который составляет часть рамы, составляющей платформу транспортного средства 3, и рамы (не показана) устройства 1 привода. Участки 13а, 13b держателей расположены поперечно относительно центра элемента 13 рамы в направлении ширины транспортного средства. Стрелки на фиг.5 обозначают взаимосвязи положения в состоянии, когда устройство 1 привода установлено на транспортном средстве.
Статоры 14А, 14B электродвигателей 2А, 2B закреплены внутри частей левой и правой конечных сторон кожуха 11 редуктора, и кольцевые роторы 15А, 15B установлены с возможностью вращения на сторонах внутренней окружности статоров 14А, 14B, соответственно. Цилиндрические оси 16А, 16B, которые окружают внешние окружности осей 10А, 10B, соединены с внутренним участками вдоль окружности роторов 15А, 15B. Цилиндрические оси 16А, 16B удерживаются торцевыми стенками 17А, 17B и средними стенками 18А, 18B кожуха 11 редуктора через подшипники 19А, 19B так, что оси установлены коаксиально и с возможностью относительного вращения относительно валов 10А, 10B. Круговые датчики, 20 В положения, которые передают обратную информацию о положении при вращении роторов 15А, 15B в контроллеры (не показаны) для электродвигателей 2А, 2B, расположены на внешних окружностях одной оконечной стороны цилиндрических осей 16А, 16B и на торцевых стенках 17А, 17B кожуха 11 редуктора.
Планетарные зубчатые редукторы 12А, 12B содержат: солнечные зубчатые колеса 21А, 21B; множество планетарных зубчатых колес 22А, 22B, которые зацеплены с солнечными зубчатыми колесами 21; планетарные водила 23А, 23B, которые поддерживают планетарные зубчатые колеса 22А, 22B; и кольцевые зубчатые колеса 24А, 24B, которые зацеплены со сторонами внешней окружности планетарных зубчатых колес 22А, 22B. Усилия привода от электродвигателей 2А, 2B подают через солнечные зубчатые колеса 2A, 21B, и усилия привода с уменьшенной скоростью выводят через планетарные водила 23А, 23B.
Солнечные зубчатые колеса 21A, 21B сформированы интегрально с цилиндрическими осями 16А, 16B. Как показано на фиг.4, например, планетарные зубчатые колеса 22А, 22B имеют двойные шестерни, имеющие: первые шестерни 26А, 26B с большим диаметром, которые зацепляются непосредственно с солнечными зубчатыми колесами 21A, 21B; и вторые шестерни 27А, 27B, которые выполнены меньшими по диаметру, чем первые шестерни 26А, 26B, и сформированы внутри интегральной формы в состоянии, в котором первые шестерни 26А, 26B и вторые шестерни 27А, 27B расположены коаксиально и смещены в осевом направлении. Планетарные зубчатые передачи 22А, 22B поддерживаются водилами 23А, 23B планетарной передачи. Участки осевого внутреннего конца водил 23А, 23B планетарной передачи продолжаются в направлении радиально внутренней стороны, и установлены на шлицах на осях 10А, 10B, так, чтобы обеспечивалась возможность их интегрального вращения вокруг осей 10А, 10B, и водила 23А, 23B планетарной передачи поддерживаются средними стенками 18А, 18B через подшипники 33А, 33B.
Средние стенки 18А, 18B имеют изогнутую форму для отделения отсеков размещения электродвигателей, в которых размещают электродвигатели 2А, 2B от отсеков редуктора, в которых размещаются планетарные зубчатые редукторы 12А, 12B. В средних стенках 18А, 18B осевой интервал между средними стенками 18А и 18B расширен от внешней радиальной стороны в направлении внутренней радиальной стороны. Подшипники 33A, 33B, которые поддерживают водила 23А, 23B планетарной зубчатой передачи, размещены на внутренних радиальных сторонах средних стенок 18А, 18B и на сторонах планетарных зубчатых редукторов 12А, 12B, и контактные кольца 41А, 41B для статоров 14А, 14B помещены на внешних радиальных сторонах средних стенок 18А, 18B, и на сторонах электродвигателей 2А, 2B (см. фиг.3).
Кольцевые зубчатые колеса 24A, 24B содержат: участки 28А, 28 В зубчатых колес, поверхности внутренней окружности которых зацеплены со вторыми шестернями 27А, 27B с малым диаметром; участки 29А, 29B с малым диаметром, диаметр которых меньше, чем у участков 28А, 28B зубчатых колес, и которые расположены противоположно друг другу в среднем положении кожуха 11 редуктора; и соединительные участки 30А, ЗОВ, которые радиально соединяют участки осевых внутренних концов для участков 28А, 28B зубчатых колес, с осевыми внешними оконечными участками 29А, 29B с малым диаметром. В данном варианте выполнения максимальные радиусы кольцевых зубчатых колес 24А, 24B установлены так, чтобы они были меньшими, чем максимальные расстояния первых ведущих шестерен 26А, 26B от центров осей 10А, 10B. Участки 29А, 29B с малым диаметром установлены на шлицах на внутреннем кольце 51 односторонней муфты 50 (описана ниже), и кольцевые зубчатые колеса 24А, 24B вращаются интегрально с внутренним кольцом 51 односторонней муфты 50.
Участки цилиндрического пространства обеспечены между кожухом 11 редуктора и кольцевыми зубчатыми колесами 24А, 24B. На участках указанного пространства, предусмотрены гидравлические тормоза 60А, 60B, как средство торможения для кольцевых зубчатых колес 24А, 24B, так, что они радиально накладываются на первые шестерни 26А, 26B и накладываются вдоль оси на вторые шестерни 27А, 27B. В гидравлических тормозах 60А, 60B множество стационарных пластин 35А, 35B, которые установлены на шлицах на внутренней поверхности окружности участка, поддерживающего цилиндрическую внешнюю радиальную сторону 34, которая продолжается вдоль оси на внутренней радиальной стороне кожуха 11 редуктора, и множество вращающихся пластин 36А, 36B, которые установлены на шлицах на внешних поверхностях окружностей кольцевых зубчатых колес 24А, 24B, поочередно предусмотрены в осевом направлении, и пластины 35А, 35B, 36А, 36B зацепляются и высвобождаются с помощью кольцевых поршней 37А, 37B. Поршни 37А, 37 В гибко размещены в кольцевых цилиндрических камерах 38А, 38B, которые сформированы между стенкой 39 поперечного разделения, которая продолжается до внутренней радиальной стороны от среднего положения кожуха 11 редуктора, и участок 34 поддержания внешней радиальной стороны и участок 40 поддержания внутренней радиальной стороны, соединены друг с другом с помощью стенки 39 поперечного разделения. Поршни 37А, 37B выдвигаются при подаче масла под высоким давлением в цилиндрические камеры 38А, 38B, и возвращаются в результате выпуска масла из цилиндрических камер 38А, 38B. Гидравлические тормоза 60А, 60B соединены с масляным насосом 70, который, как показано на фиг.5, размещен между участками 13а, 13b держателей описанного выше элемента 13 рамы.
Более конкретно, поршни 37А, 37B имеют первые стенки 63А, 63B поршней и вторые стенки 64А, 64B поршней на осевых передней и задней сторонах, и стенки 63А, 63B, 64А, 64B поршней соединены друг с другом с помощью цилиндрических внутренних стенок 65А, 65B, расположенных вдоль окружности. Поэтому, кольцевые зазоры, которые открываются в радиально внешнюю сторону, формируют между стенками 63А, 63B первого поршня и стенками 64А, 64B второго поршня. Кольцевые зазоры разделены на осевые передние и задние стороны с помощью элементов 66А, 66B разделения, которые прикреплены на поверхностях внутренней окружности внешних стенок цилиндрических камер 38А, 38B. В кожухе 11 редуктора, зазоры между стенкой 39 поперечного разделения и вторыми стенками 64А, 64B поршня сформированы, как первые рабочие камеры, в которые требуется непосредственно подавать масло под высоким давлением, и зазоры между элементами 66А, 66B перегородки и первыми стенками 63А, 63B поршня сформированы, как вторые рабочие камеры, которые сообщаются с первыми рабочими камерами через сквозные отверстия, которые сформированы в стенках 65А, 65B внутренней окружности. Зазоры между вторыми стенками 64А, 64B поршней и элементами 66А, 66B перегородки сообщаются с атмосферой.
В гидравлических тормозах 60А, 6B, масло высокого давления (рабочее масло) вводят в первую операционную камеру и вторую операционную камеру, и стационарные пластины 35А, 35B и вращающиеся пластины 36А, 36B могут быть прижаты друг к другу под действием давления рабочего масла, которое действует на стенки 63А, 63B первого поршня и стенки 64А, 64B второго поршня. Поэтому, чем большие площади приема давления могут быть получены стенками 63А, 63B, 64А, 64B первого и второго поршней в осевых передних и задней сторонах, тем большая сила прижима к стационарным пластинам 35А, 35B и вращающимся пластинам 36А, 36B может быть получена при подавлении радиальных областей поршней 37А, 37B.
В гидравлических тормозах 60А, 60B стационарные пластины 35А, 35B поддерживаются удерживающим участком 34 на внешней радиальной стороне, которая продолжается от кожуха 11 редуктора, а вращающиеся пластины 36А, 36B удерживаются кольцевыми зубчатыми колесами 24А, 24B. Когда обе пластины 35А, 35B, 36А, 36B прижимаются поршнями 37А, 37B, то силы торможения воздействуют на кольцевые зубчатые колеса 24А, 24B из-за фрикционного зацепления между обеими пластинами 35А, 35B, 36А, 36B. Когда зацепление с помощью поршней 37А, 37B высвобождается в данном состоянии, обеспечивается возможность свободного вращения кольцевых зубчатых колес 24А, 24B.
Также между соединительными участками 30А, 30B кольцевых зубчатых колес 24А, 24B, которые расположены вдоль оси противоположно друг другу, обеспечивается часть пространства. В части пространства предусмотрена односторонняя муфта 50, которая передает мощность только в одном направлении на кольцевые зубчатые колеса 24А, 24B, и которая прерывает подачу мощность в других направлениях. В односторонней муфте 50, множество эксцентриковых роликов расположены между внутренним кольцом 51 и наружным кольцом 52, и муфта выполнена так, что внутреннее кольцо 51, благодаря установке на шлицы, вращается интегрально с участками 29А, 29B малого диаметра кольцевых зубчатых колес 24А, 24B. Наружное кольцо 52 расположено и зафиксировано против вращения с помощью удерживающего участка 40 на внутренней радиальной стороне. Односторонняя муфта 50 выполнена таким образом, что, когда транспортное средство должно двигаться вперед, устанавливается соединение, и вращение кольцевых зубчатых колес 24А, 24B блокируются. Более конкретно, односторонняя муфта 50 выполнена так, что кольцевые зубчатые колеса 24А, 24B блокируются и разделяются, в зависимости от направления воздействия крутящего момента, воздействующего на кольцевые зубчатые колеса 24А, 24B. Если предположить, что направление вращения кольцевых зубчатых колес 24А, 24B, когда транспортное средство движется вперед, представляет собой нормальное направление, вращение кольцевых зубчатых колес 24А, 24B блокируется в случае, когда крутящий момент в обратном направлении воздействует на кольцевые зубчатые колеса 24А, 24B.
Далее гидравлическая цепь, действующая, как гидравлический контроллер для устройства 1 привода, будет описана со ссылкой на фиг.6 и 7.
Гидравлическая цепь 71 выполнена таким образом, что рабочая масса, выбрасываемая из электрического масляного насоса 70, может подаваться в первые операционные камеры гидравлических тормозов 60А, 60 В через клапан 73 - регулятор и клапан 74 управления тормозами. Электрический масляный насос 70 работает в двух режимах или в режиме высокого давления и в режиме низкого давления с помощью электродвигателя 80, выполненного на основе бесщеточного двигателя постоянного тока, который не содержит датчики положения.
Клапан 74 управления тормозом соединен с каналом 72 масла масляного насоса, который соединяет электрический масляный насос 70 с клапаном 74 управления тормозами, и каналом 75 масла тормоза, который соединен с гидравлическими тормозами 60А, 60B, и выполнен так, что он связывает/прерывает канал 72 масла насоса и канал 75 масла тормоза. В состоянии, когда канал 72 масла насоса и канал 75 масла тормоза сообщаются друг с другом, операционное масло в канале 72 масла насоса поступает в гидравлические тормоза 60А, 60B, обеспечивая зацепление тормозов, и в случае, когда канал 72 масла насоса и канал 75 масла тормоза прерывают, канал 75 масла тормоза соединяется с дренажным портом 74b, и масло выпускают из гидравлических тормозов 60А, 60B для обеспечения возможности высвобождения гидравлических тормозов 60А, 60B.
Клапан 73 регулятора соединен с каналом 72 масла насоса. Клапан 73 регулятора содержит золотник 73a, используемый, как механизм 73f переключения, для соединения/прерывания между каналом 72 масла насоса и портом 73b подачи. Золотник 73а подпружинен пружиной 73c в направлении (на фиг.6, направление налево, ниже называется направлением неподачи), в котором соединение между каналом 72 масла насоса и портом 73b подачи прерывается, будучи прижатым в направлении (на фиг.6, направление направо, ниже называется направлением подачи), в котором канал 72 масла насоса и порт 73b подачи сообщаются друг с другом под давлением масла из канала 72 масла насоса, которое поступает в масляную камеру 73d на левом конце фигуры, и дополнительно прижимается в направлении неподачи под давлением масла, которое поступает в масляную камеру 73е на правом конце фигуры.
Масляная камера 73е на правом конце клапана 73 регулятора может быть соединена с каналом 72 масла насоса через управляющий масляный канал 76 и переключающий клапан 77 управления. Переключающий клапан 77 управления выполнен на основе электромагнитного трехходового клапана, которым управляет ECU 45 (гидравлический контроллер 48). Когда в соленоид 77а переключающего клапана 77 управления поступает питание от ECU 45, канал 72 масла насоса подключается к управляющему масляному каналу 76 для подачи давления масла из канала 72 масла насоса в масляную камеру 73е. Когда питание соленоида 77а отключается с помощью ECU 45, переключающий клапан 77 управления прерывает соединение между каналом 72 масла насоса и управляющим масляным каналом 76, соединяет управляющий масляный канал 76c дренажным портом 77b, открывая, таким образом, масляную камеру 73e в атмосферу.
Управляющий масляный канал 76 соединен с масляной камерой 73е и также с клапаном 74 управления тормозом. Когда соленоид 77а клапана 77 управления переключением включают с помощью ECU 45, клапан 77 управления переключением соединяет канал 72 масла насоса с управляющим масляным каналом 76, для того, чтобы открыть клапан 74 управления тормозом, связывая, таким образом, сообщение канала 72 масла насоса с управляющим масляным каналом 75 тормоза. Когда питание соленоида 77а отключают, ECU 45, переключающийся клапан 77 управления, разрывает соединение между каналом для масла насоса 72 и управляющим масляным каналом 76, чтобы закрыть клапан 74 управления тормозами, таким образом, отсоединяя канал 72 масла насоса от канала 75 масла тормоза.
Канал 78 низкого давления соединен для подачи в порт 73b клапана 73 регулятора. Масло, протекающее через канал 78 низкого давления, поступает в различные участки устройства 1 привода, такие как электродвигатели 2А, 2B, планетарные зубчатые редукторы 12А, 12B и подшипники, через множество каналов разветвления (не показаны), предназначенных для использования в качестве масла охлаждения или масла для смазки.
Редукционный клапан 79b, который, когда давление в линии достигает заданного давления, сбрасывает давление масла, соединен с каналом 72 масла насоса.
Здесь ECU 45 представляет собой контроллер, который выполняет различное управление во всем транспортном средстве, и, как показано на фиг.2, содержит: устройство 46 оценки состояния движения, которое выполняет оценку состояния движения транспортного средства по скорости транспортного средства, углу поворота, степени AP открывания педали акселератора и т.п.; калькулятор 47 крутящего момента, который рассчитывает крутящие моменты двух электродвигателей 2А, 2B; контроллер 48 давления масла, который управляет гидравлическими тормозами 60А, 60B по состоянию движения транспортного средства, оценка которого была получена с помощью блока 46 оценки состояния движения; и модулем 49 противодействия, который, в случае отказа электродвигателей 2А, 2B или блока высоковольтного управления (обратные преобразователи, усилители, и тому подобное, которые не показаны), который управляет электродвигателями 2А, 2B, изменяет установленное давление масла клапана 73 регулятора на низкое давление PL масла, для высвобождения гидравлических тормозов 60А, 60B. Скорость транспортного средства, угол управления, степень AP открывания педали акселератора, положение сдвига, SOC и т.п. вводят в ECU 45, и сигналы для управления двигателем 4 внутреннего сгорания, которые предназначены для управления электродвигателями 2А, 2B, обозначающие состояние генерирования энергии, состояние заряда, состояние разряда и т.п. в аккумуляторных батареях 9, сигналы управления, подаваемые в соленоид 74а клапана 74 управления тормозом, и соленоид 77а переключающего клапана 77 управления, и т.п., выводят из ECU 45.
Далее будет описана работа гидравлической цепи 71 в соответствии с устройством 1 привода.
На фиг.6 показано положение гидравлической цепи 71 в состоянии, в котором гидравлические тормоза 60А, 60B освобождены. В это время электрический масляный насос 70 работает в режиме низкого давления, и ECU 45 понижает энергию соленоида 77а переключающего клапана 77 управления, прерывает соединение между каналом 72 масла насоса и управляющим масляным каналом 76, и соединяет управляющий масляный канал 76 с дренажным портом 77b. В это время канал 72 масла насоса сообщается с портом 73b подачи, и канал 75 масла тормоза соединен с дренажным портом 74b, прерывая, таким образом, канал 72 подачи масла насоса и канал 75 масла тормоза.
В клапане 73 регулятора, в этом состоянии, выражение равновесия силы давления масла и нагрузки пружины будет следующим:
Из этого уравнения давление гидравлической цепи, когда гидравлические тормоза 60А, 60B высвобождены, представляется следующей формулой:
и давление в линии канала 72 масла насоса поддерживается, как низкое давление PL масла.
В Уравнениях (1) и (2), представленных выше,
A1: область приема давления (мм2) золотника 73 а масляной камеры 73d,
PL: давление в линии (Н/мм2), когда гидравлические тормоза 60А, 60B высвобождены,
K: жесткость пружины (Н/мм) пружины 73c, и
δ: запас отклонения (мм) пружины 73c (заштрихованное поле золотника 73а).
Когда гидравлические тормоза 60А, 60B зацеплены в состоянии, показанном на фиг.6, масляный насос 70 переключают в режим высокого давления, и он работает, ECU 45 подает питание в соленоид 77а клапана 77 управления переключением для соединения канала 72 масла насоса с управляющим масляным каналом 76. Поэтому, рабочее масло в канале 72 масла насоса вводят в масляную камеру 73е, и канал 72 масла насоса и канал 75 масла тормоза сообщаются друг с другом. В это время золотник 73 а клапана 73 регулятора прижимается в направлении неподачи, и канал 72 масла насоса, и порт 73b подачи временно прерываются.
На фиг.7 показана гидравлическая цепь 71 в состоянии, в котором гидравлические тормоза 60А, 60B зацеплены. Канал 72 масла насоса и канал 75 масла тормоза сообщаются друг с другом в результате подачи питания в соленоид 77а клапана 77 управления переключением с помощью ECU 45. Когда рабочее масло накапливается в канале 75 масла тормоза и в первых рабочих камерах гидравлических тормозов 60А, 60B, золотник 73a клапана 73 регулятора, который был прижат в направлении неподачи, перемещается из состояния, в котором канал 72 масла насоса и порт 73b подачи временно прерываются, так, образуется состояние, в котором канал 72 масла насоса и порт 73b подачи сообщаются друг с другом.
В клапане 73 регулятора, в этом состоянии, выражение равновесия усилий давления масла и нагрузки пружины представляет собой следующее:
Из этого уравнения давление гидравлической цепи, когда гидравлические тормоза 60А, 60B высвобождены, представлено следующим:
и давление в линии канала 72 масла насоса поддерживается, как высокое давление РН масла.
Как очевидно из уравнений (3) и (4), высокое давление РН масла выше, чем низкое давление PL масла.
В Уравнениях (3) и (4), представленных выше,
A1: площадь приема давления (мм2) золотника 73a масляной камеры 73d,
A2: площадь приема давления (мм2) золотника 73а масляной камеры 73е,
PH: давление в линии (Н/мм2), когда гидравлические тормоза 60А, 60B зацеплены,
K: жесткость пружины (Н/мм) пружины 73c, и
δ: запас отклонения (мм) пружины 73c (заштрихованное поле золотника 73а).
В состоянии, когда гидравлические тормоза 60А, 60B зацеплены, рабочее масло, давление которого уменьшают с помощью редукционного клапана 79а, подают в канал 78 с низким давлением, и дополнительно подают в различные участки устройства 1 привода, такие как электродвигатели 2А, 2B, планетарные зубчатые редукторы 12А, 12B и подшипники через множество каналов разветвления (не показаны), для использования в качестве масла охлаждения или масла для смазки.
Как описано выше, в гидравлическом контроллере, в соответствии с вариантом выполнения, когда гидравлические тормоза 60А, 60B должны быть включены, ECU 45 подает питание в соленоид 77а, соединяя, таким образом, канал 72 масла насоса с управляющим масляным каналом 76. В соответствии с этим, происходит установка давления масла клапана 73 регулятора переключается с низкого давления PL масла на высокое давление PH масла (см. уравнения (2) и (4) выше). Поскольку управляющий масляный канал 76 соединен с масляной камерой 73е и также с клапаном 74 управления тормозом, клапан 74 управления тормозом открывается, и канал 72 масла насоса и канал 75 масла тормоза сообщаются друг с другом. А именно, когда гидравлические тормоза 60А, 60B должны быть включены, ECU 45 открывает клапан 74 управления тормозами для соединения канала 72 масла насоса и канала 75 масла тормоза друг с другом 74, в соответствии с переключением установленного давления масла клапана 73 регулятора с низкого давления PL масла на высокое давление РН масла.
В отличие от этого, когда гидравлические тормоза 60А, 60B требуется разъединить, ECU 45 отключает питание соленоида 77а для соединения управляющего масляного канала 76 с дренажным портом 77b, открывая, таким образом, масляную камеру 73е в атмосферу. В соответствии с этим, установленное давление масла клапана 73 регулятора переключается с высокого давления PH масла на низкое давление PL масла (см. уравнения (2) и (4) выше). Поскольку управляющий масляный канал 76 соединен с камерой 73е масла и также с клапаном 74 управления тормозом, клапан 74 управления тормозом закрыт, и соединение между каналом 72 масла насоса и каналом 75 масла тормоза прерывается. А именно, когда гидравлические тормоза 60А, 60B должны быть разъединены, ECU 45 закрывает клапан управления 74 тормозом, для прерывания соединения между каналом 72 масла насоса и каналом 75 масла тормоза, в соответствии с переключением установленного давления масла клапана 73 регулятора с высокого давления РН масла на низкое давление PL масла.
В состоянии, в котором гидравлические тормоза 60А, 60B разъединены, электрический масляный насос 70 работает в режиме низкого давления, в котором давление в линии является низким давлением PL масла, и, в состоянии, в котором гидравлические тормоза 60А, 60B зацеплены, он работает в режиме высокого давления, в котором давление в линии представляет собой высокое давление РН масла.
На фиг.8 показан график, представляющий характеристики нагрузки электрического масляного насоса 70.
Как показано на фиг.8, в режиме низкого давления, по сравнению с режимом высокого давления, мощность электрического масляного насоса 70 уменьшается приблизительно до 1/4-1/5, при поддержании скорости потока подачи рабочего масла. В режиме низкого давления, нагрузка электрического масляного насоса 70 является малой, и потребление энергии электродвигателем 80, который приводит в движение электрический масляный насос 70, может быть уменьшено по сравнению с режимом высокого давления.
Далее будет описана работа устройства 1 привода. На фиг.9-14 представлены коллинеарные диаграммы в различных состояниях. S и С с левой стороны обозначают солнечное зубчатое колесо 21А планетарного зубчатого редуктора 12А, соединенного с электродвигателем 2А, и планетарное водило 23А, соединенное с осью 10А, соответственно, S и C с правой стороны обозначают солнечную зубчатую передачу 21B планетарного зубчатого редуктора 12B, соединенного с электродвигателем 2B, и планетарное водило 23B, соединенное с осью 10b, соответственно, R обозначает кольцевые зубчатые колеса 24А, 24B, BRK обозначает гидравлические тормоза 60А, 60B, и OWC обозначает одностороннюю муфту 50. В следующем описании, предполагается, что направление вращения солнечных зубчатых передач 21A, 21B, когда транспортное средство движется вперед, представляет собой нормальное направление. На чертежах с верхней стороны от состояния, где транспортное средство остановлено, обозначается вращение в нормальном направлении, с нижней стороны обозначается вращение в обратном направлении, стрелка, направленная вверх, обозначает крутящий момент в нормальном направлении, и стрелка, направленная вниз, обозначает крутящий момент в обратном направлении.
На фиг.9 показана коллинеарная диаграмма во время остановки транспортного средства. В это время электродвигатели 2А, 2B остановлены, и оси 10А, 10B остановлены. Поэтому, крутящий момент не воздействует ни на один из элементов.
На фиг.10 показана коллинеарная диаграмма в случае, когда транспортное средство движется вперед под действием крутящих моментов электродвигателя электродвигателей 2А, 2B устройства 1 привода, а именно, транспортное средство движется вперед в то время, как устройство 1 привода функционирует, как сторона ускорения. Когда выполняется привод электродвигателей 2А, 2B, крутящий момент в нормальном направлении прикладывается к солнечным зубчатым колесам 21A, 21B. В это время, как описано выше, кольцевые зубчатые колеса 24A, 24B блокируются односторонней муфтой 50, и блокирующие крутящие моменты в нормальном направлении прикладывают к кольцевым зубчатым колесам 24А, 24B, которые пытаются вращаться в обратном направлении. Это приводит к тому, что планетарные водила 23А, 23B будут вращаться в нормальном направлении, так, что транспортное средство движется вперед. Сопротивления при вращении от осей 10А, 10B действуют на планетарные водила 23А, 23B в обратном направлении. Во время движения двигателя транспортного средства, когда зажигание включено и крутящий момент электродвигателей 2А, 2B увеличивается, односторонняя муфта 50 механически соединяется, и кольцевые зубчатые колеса 24А, 24B блокируются. Поэтому, транспортное средство может начать движение без соединения гидравлических тормозов 60А, 60B. Поэтому, может быть улучшена надежность при запуске двигателя транспортного средства.
На фиг.11 показана коллинеарная диаграмма для случая, в котором электродвигатели 2А, 2B остановлены в состоянии, в котором транспортное средство движется вперед от модуля 6, привода, или его буксируют в направлении вперед другим транспортным средством и т.п., а именно, в случае, когда устройство 1 привода замедлено или движется по наклонной (движется по инерции), и электродвигатели 2А, 2B остановлены. Когда электродвигатели 2А, 2B остановлены, как показано на фиг.10, крутящие моменты в нормальном направлении, которые генерируются осями 10А, 10B, и которые обеспечивают продолжение движения вперед, воздействуют на планетарные водила 23А, 23B, и, поэтому, крутящие моменты в обратном направлении действуют на кольцевые зубчатые колеса 24А, 24B, в результате чего, односторонняя муфта 50 высвобождается. Поэтому, кольцевые зубчатые колеса 24А, 24B работают в режиме холостого хода со скоростью выше, чем у планетарных водил 23А, 23B. В случае, когда электродвигателям 2А, 2B не требуется выполнять регенерацию, когда кольцевые зубчатые колеса 24А, 24B не зафиксированы гидравлическими тормозами 60А, 60B, электродвигатели 2А, 2B останавливаются, и одновременное вращение электродвигателей 2А, 2B может быть предотвращено. В это время синхронные крутящие моменты в нормальном направлении воздействуют на электродвигатели 2А, 2 В, и суммарный компонент крутящего момента, который балансирует с синхронными крутящими моментами и трением кольцевых зубчатых колес 24А, 24B, представляет собой потери в осях 10А, 10B.
На фиг.12 показана коллинеарная диаграмма для случая, когда электродвигатели 2А, 2B выполняют регенерацию в состоянии, когда транспортное средство движется вперед, благодаря приводу от модуля 6 привода, и скорость транспортного средства, естественно, замедляется, из-за выключения педали акселератора или благодаря замедлению в результате торможения под действием тормозов, или именно в случае, когда устройство 1 привода замедляется или движется под наклоном (движется по инерции), и электродвигатели 2А, 2B выполняют регенерацию. Когда электродвигатели 2А, 2B выполняют регенерацию в состоянии, показанном на фиг.10, крутящие моменты в нормальном направлении, которые генерируются осями 10А, 10B, и которые обеспечивают продолжение движения вперед, действуют на планетарные водила 23А, 23B, и, поэтому, крутящие моменты в обратном направлении воздействуют на кольцевые зубчатые колеса 24А, 24B, таким образом, что освобождается односторонняя муфта 50. В это время, когда гидравлические тормоза 60А, 60B зацеплены, для приложения блокирующих крутящих моментов в обратном направлении на кольцевые зубчатые колеса 24А, 24B, кольцевые зубчатые колеса 24А, 24B блокированы, и крутящие моменты рекуперативного торможения в обратном направлении действуют на электродвигатели 2А, 2B. Поэтому, может быть выполнен рекуперативный заряд от электродвигателей 2А, 2B.
На фиг.13 показана коллинеарная диаграмма для случая, когда транспортное средство движется в обратном направлении, под действием крутящих моментов электродвигателей, таких как электродвигатели 2А, 2B устройства 1 привода, или именно, в случае, в котором устройство 1 привода выполняет ускорение при движении в обратном направлении. Когда электродвигатели 2А, 2B приводят в движение в обратном направлении, крутящие моменты в обратном направлении прикладываются к солнечным зубчатым колесам 21A, 21B. В это время крутящие моменты в нормальном направлении действуют на кольцевые зубчатые колеса 24А, 24B, и односторонняя муфта 50 высвобождается. В это время, когда гидравлические тормоза 60А, 60B включаются для приложения блокирующих крутящих моментов в обратном направлении на кольцевые зубчатые колеса 24А, 24B, кольцевые зубчатые колеса 24А, 24B блокируются, и планетарные водила 23А, 23B вращаются в обратном направлении для выполнения движения в обратном направлении. Сопротивления движения со стороны осей 10А, 10B действуют на планетарные водила 23А, 23B в нормальном направлении.
На фиг.14 показана коллинеарная диаграмма для случая, когда транспортное средство движется в обратном направлении под действием привода от модуля 6 привода, или его буксируют в обратном направлении другим транспортным средством и т.п., или именно для случая, когда устройство 1 привода приводят в движение в обратном направлении. В это время кольцевые зубчатые колеса 24А, 24B блокируются односторонней муфтой 50, и крутящие моменты в обратном направлении, которые пытаются продолжать движение в обратном направлении, прикладываются от осей 10А, 10B к планетарным водилам 23А, 23B. Поэтому, кольцевые зубчатые колеса 24А, 24B блокируются односторонней муфтой 50, и блокирующие крутящие моменты в нормальном направлении прикладывают к кольцевым зубчатым колесам 24А, 24B, которые пытаются вращаться в обратном направлении, и направленные противоположно электродвижущие силы генерируются в нормальном направлении в электродвигателях 2А, 2B.
Далее, со ссылкой на фиг.15 и 16, будет описано управление зацеплением односторонней муфты 50 и гидравлическими тормозами 60А, 60B во время движения транспортного средства.
На фиг.15 (а) показана коллинеарная диаграмма устройства 1 привода во время постоянного движения с высокой скоростью, которое обеспечивается от модуля 6 привода (состояние по фиг.11). В этом состоянии, как описано выше, также не включены односторонняя муфта 50 и гидравлические тормоза 60А, 60B. В случае, когда требуется чтобы электродвигатели 2А, 2B выполнили вспомогательный привод, в этом состоянии, целевое количество оборотов электродвигателей 2А, 2B определяют в соответствии с количеством оборотов планетарных водил 23А, 23B, и, как показано на фиг.15(b), вспомогательные крутящие моменты привода (ведущие крутящие моменты) выводят от электродвигателей 2А, 2B в соответствии с целевым количеством оборотов электродвигателей 2А, 2B, в результате чего, как показано на фиг.15(c), односторонняя муфта 50 соединяется, и может быть выполнен вспомогательный привод (состояние на фиг.10).
В отличие от этого, в случае, когда выполняют заряд от электродвигателей 2А, 2B во время постоянного движения с высокой скоростью, которое обеспечивается от модуля 6 привода (фиг.16(a)), целевое количество оборотов электродвигателей 2А, 2B вначале определяют в соответствии с количеством оборотов планетарных водил 23А, 2B, количество вращений электродвигателей 2А, 2B делают таким, чтобы оно совпадало с целевым количеством оборотов, как показано на фиг.16(b), и, когда количества оборотов становятся, по существу, равными друг другу, как показано на фиг.16(c), гидравлические тормоза 60А, 60B включаются, и электродвигатели 2А, 2B выводят рекуперативные тормозящие крутящие моменты (рекуперативные крутящие моменты), в результате чего, как показано на фиг.16(d), электродвигатели 2А, 2B могут выполнить заряд (состояние по фиг.12).
На фиг.17 показан вид, представляющий состояние электродвигателей 2А, 2B и механизма отсоединения (ниже односторонняя муфта 50 и гидравлические тормоза 60А, 60B, в общем, называются механизмом отсоединения), и линейное давление в гидравлической цепи 71 в состоянии движения транспортного средства. На фигуре "Передний" означает модуль 6 привода, который осуществляет привод передних колес Wf, "Задний" означает устройство 1 привода, которое осуществляет привод задних колес Wr, "○" обозначает операцию (включая в себя привод в движение и регенерацию), и "×" обозначает отсутствие операции (остановку). Кроме того, состояние МОТ означает состояние электродвигателей 2А, 2B устройства 1 привода, "OWC" означает одностороннюю муфту 50, и "Brake" означает гидравлические тормоза 60А, 60B.
Во время остановки электродвигатели 2А, 2B устройства 1 привода остановлены, и модуль 6 привода на стороне передних колес Wf и устройство 1 привода на стороне задних колес Wr остановлены, и, как описано со ссылкой на фиг.9, также механизм отсоединения находится в не рабочем состоянии. В это время давление в линии регулируют на уровне низкого давления PL масла (см. фиг.6).
После того, как зажигание будет включено, во время запуска EV, электродвигатели 2А, 2B устройства 1 привода для задних колес Wr приводят в движение. В это время, как описано со ссылкой на фиг.10, механизм разъединения блокируется односторонней муфтой 50, и мощность электродвигателей 2А, 2B передают на оси 10А, 10B. В это время давление в линии регулируют по низкому давлению PL масла.
Во время ускорения, затем выполняют привод четырех колес с помощью модуля 6 привода на стороне передних колес Wf и устройство 1 привода на стороне задних колес Wr. Также, в это время, как описано со ссылкой на фиг.10, механизм разъединения блокирован односторонней муфтой 50, и мощность электродвигателей 2А, 2B передается на оси 10А, 10B. Также, в это время, давление в линии регулируют на уровне низкого давления PL масла.
Во время постоянного движения в диапазонах малых и средних скоростей, эффективность электродвигателя является высокой, и поэтому, модуль 6 привода на стороне передних колес Wf находится в нерабочем состоянии, и выполняет привод на задние колеса с помощью устройства 1 привода на стороне задних колес Wr. Также в это время, как описано со ссылкой на фиг.10, механизм разъединения блокируется односторонней муфтой 50, и мощность электродвигателей 2А, 2B передают на оси 10А, 10B. Также в это время, давление в линии регулируют на уровне низкого давления PL масла.
В отличие от этого, при постоянном движении с высокой скоростью в диапазоне высоких скоростей, эффективность электродвигателей является высокой, и, поэтому, выполняют привод передних колес с помощью модуля 6 привода на стороне передних колес Wf. В это время, как описано со ссылкой на фиг.11, односторонняя муфта 50 механизма разъединения отключена (OWC свободна), и гидравлические тормоза 60А, 60B не включены. Поэтому, электродвигатели 2А, 2B остановлены. Также, в это время, давление в линии регулируют по низкому значению PL давления масла.
Также, в случае естественного замедления, как описано со ссылкой на фиг.11, односторонняя муфта 50 механизма разъединения отсоединяется (OWC свободна), и гидравлические тормоза 60А, 60B не включены. Поэтому, электродвигатели 2А, 2B остановлены. Также, в это время, давление в линии регулируют, как низкое давление PL масла.
В отличие от этого, когда следует выполнить регенерацию при замедлении, например, когда движение требуется выполнить под действием силы привода модуля 6 привода на стороне передних колес Wf, как описано со ссылкой на фиг.12, односторонняя муфта 50 механизма разъединения разъединена (OWC свободна, но гидравлические тормоза 60А, 60B зацеплены, обеспечивая, таким образом, выполнение электродвигателям 2А, 2B рекуперативного заряда. В это время давление в линии регулируют, как высокое давление PH масла (см. фиг.7).
При нормальном движении, во взаимодействии с управлением торможением тормозов транспортного средства, электродвигатели 2А, 2B выполняют регенерацию, для восстановления энергии движения. В случае экстренного торможения (включается ABS), однако, регенерация электродвигателей 2А, 2B запрещается, и приоритет отдают торможению транспортного средства, если оно требуется. В этом случае, односторонняя муфта 50 находится в состоянии разъединения (OWC свободна), и гидравлические тормоза 60А, 60B не включаются, в результате чего электродвигатели 2А, 2B останавливают. В это время давление в линии регулируют, как низкое давление PL масла.
В случае движения задним ходом модуль 6 привода на стороне передних колес Wf останавливается, и устройство 1 привода на стороне задних колес Wr приводят в движение таким образом, что выполняют управление приводом от задних колес, или выполняют движение с приводом от четырех колес от модуля 6 привода на стороне передних колес Wf и устройства 1 привода на стороне задних колес Wr. В это время, как описано со ссылкой на фиг.13, электродвигатели 2А, 2B вращаются в обратном направлении, односторонняя муфта 50 механизма разъединения разъединена (OWC свободна), но гидравлические тормоза 60А, 60B зацеплены, в результате чего, мощность электродвигателей 2А, 2B передают на оси 10А, 10B. В это время давление в линии регулируют, как высокое давление РН масла.
В случае, когда транспортное средство буксируют в сторону направления вперед (буксировка FWD), как описано со ссылкой на фиг.11, одностороннюю муфту 50 механизма разъединения разъединяют (OWC свободна), гидравлические тормоза 60А, 60B не включают, и, поэтому, электродвигатели 2А, 2B останавливаются. В случае буксировки FWD, когда электродвигатели 2А, 2B должны выполнять регенерацию, гидравлические тормоза 60А, 60B соединены аналогичным образом, как при замедлении регенерации. В это время давление в линии регулируют, как низкое давление PL масла.
В случае, когда электродвигатели 2А, 2B не могут быть приведены в движение, из-за неисправности высоковольтной системы, такой как неисправность PDU и т.п., модуль 49 противодействия неисправности отключает питание соленоида 74а клапана 74 управления тормозами, и также соленоид 77а клапана 77 управления переключением, в результате чего электродвигатели 2А, 2B высвобождаются. Затем выполняют привод передних колес с помощью модуля 6 привода на стороне передних колес Wf, в результате чего, как описано со ссылкой на фиг.11, односторонняя муфта 50 отсоединяется (OWC свободна). В это время, поскольку также гидравлические тормоза 60А, 60B высвобождаются, электродвигатели 2А, 2B останавливают, и линейное давление регулируют по низкому давлению PL масла.
На фиг.18 показана временная диаграмма устройства 1 привода и гидравлической цепи 71 в случае, когда транспортное средство движется прямо в направлении вперед.
Когда зажигание в первый раз включают, электродвигатели 2А, 2B приводятся в движение, и электрический масляный насос 70 (ЕОР) приводится в движение. В это время односторонняя муфта 50 и гидравлические тормоза 60А, 60B высвобождаются, и давление в линии устанавливается, как низкое давление PL масла (состояние по фиг.9). В этом состоянии, когда водитель устанавливает коробку передач в положение движения (D), и затем нажимает педаль акселератора, односторонняя муфта 50 зацепляется, в то время как гидравлические тормоза 60А, 60B остаются в отпущенном состоянии, и выполняется старт/ускорение от электропривода, при котором крутящие моменты электродвигателя передают на оси 10А, 10B (состояние по фиг.10). Когда транспортное средство достигает области высокой скорости, выполняется постоянное движение с высокой скоростью от модуля 6 привода. В течение этого периода электродвигатели 2А, 2B останавливают, гидравлические тормоза 60А, 60B и одностороннюю муфту 50 высвобождают, и давление в линии остается установленным, как низкое давление PL масла (состояние по фиг.11). Когда водитель затем нажимает педаль тормоза во время постоянного движения с высокой скоростью для остановки транспортного средства, как показано на фиг.16 (b) и (c), управление синхронизацией вращения для электродвигателей 2А, 2B выполняется, и гидравлические тормоза 60А, 60B включаются. В это время давление в линии устанавливают, как высокое давление РН масла (состояние на фиг.12). Когда транспортное средство затем останавливается, гидравлические тормоза 60А, 60B высвобождаются, и давление в линии переключается на низкое давление PL масла. Когда зажигание затем выключают, электродвигатели 2А, 2B останавливаются.
На фиг.19 показана временная диаграмма устройства 1 привода и гидравлической схемы 71 в случае, когда транспортное средство движется прямо обратным ходом.
Когда вначале включают зажигание, электродвигатели 2А, 2B приводятся в движение, и электрический масляный насос 70 (ЕОР) включается. В это время односторонняя муфта 50 и гидравлические тормоза 60А, 60B высвобождаются, и давление в линии устанавливают, как низкое давление PL масла (состояние на фиг.9). В этом состоянии, когда водитель переключает коробку передач в положение обратный ход (R), гидравлические тормоза 60А, 60В включаются. Когда водитель нажимает педаль акселератора, крутящий момент электродвигателя передается на оси 10А, 10B, и выполняется старт/ускорение при обратном движении (состояние на фиг.13). В это время давление в линии устанавливается, как высокое давление РН масла. Когда водитель нажимает педаль тормоза во время постоянного движения с высокой скоростью, для остановки транспортного средства, гидравлические тормоза 60А, 60B и односторонняя муфта 50 включаются. В это время, поскольку также включены гидравлические тормоза 60А, 60B, давление в линии остается установленным, как высокое давление РН масла (состояние на фиг.14). Когда транспортное средство останавливается, и коробку передач переключают в положение "парковка" (Р), гидравлические тормоза 60А, 60B высвобождаются, и давление в линии переключается на низкое давление PL масла. Когда зажигание затем выключают, электродвигатели 2А, 2B останавливаются.
Выше был описан случай, при котором, когда транспортное средство движется прямо, отсутствует какая-либо разница во вращении между левым и правым электродвигателями 2А, 2B. Затем, как показано на фиг.20 и 21, будет, в частности, описано управление зацеплением односторонней муфтой 50 и гидравлическими тормозами 60А, 60B во время движения транспортного средства в случае, когда транспортное средство поворачивает, а именно, в случае, когда существует разница во вращениях между левым и правым электродвигателями 2А, 2B,.
На фиг.20(a) показана коллинеарная диаграмма устройства 1 привода в случае, когда транспортное средство поворачивает налево во время постоянного движения с высокой скоростью, которое обеспечивается модулем 6 привода. В этом состоянии, электродвигатель 2А, который осуществляет привод левого заднего колеса LWr, вращается в обратном направлении, и электродвигатель 2B, который осуществляет привод правого заднего колеса RWr, вращается в нормальном направлении. Будет описан случай, когда, в результате использования разности вращения между левыми и правыми задними колесами LWr, RWr, выполняется регенерация (заряд) от электродвигателя 2А, который выполняет привод левого заднего колеса LWr, и выполняется силовой привод (помощь), от заднего правого колеса RWr. В это время, как показано на фиг.20(b), целевые количества оборотов электродвигателей 2А, 2B определяют в соответствии с количеством оборотов планетарных водил 23А, 23B, соответственно, и, как показано на фиг.20(b), количество оборотов электродвигателей 2А, 2B совпадает с целевым количеством оборотов. Затем крутящий момент рекуперативного торможения (рекуперативный крутящий момент) и крутящий момент вспомогательного привода (силовой крутящий момент) электродвигателей 2А, 2B в это время рассчитывают. Когда крутящий момент рекуперативного торможения возрастает, гидравлические тормоза 60А, 60B включают, и когда возрастает крутящий момент вспомогательного привода, включают одностороннюю муфту 50. На фиг.20(c) крутящий момент рекуперативного торможения электродвигателя 2B, который осуществляет привод правого заднего колеса RWr, больше чем крутящий момент рекуперативного торможения электродвигателя 2А, который выполняет привод левого заднего колеса LWr, и, поэтому, односторонняя муфта 50 включается.
В отличие от этого, в состоянии на фиг.21(d), крутящий момент рекуперативного торможения электродвигателя 2А, который осуществляет привод левого заднего колеса LWr, больше, чем крутящий момент вспомогательного привода электродвигателя B, который осуществляет привод правого заднего колеса RWr. Поэтому, целевое количество оборотов электродвигателей 2А, 2B определяют в соответствии с количеством оборотов планетарных водил 23А, 23B, как показано на фиг.21(b), соответственно, и, когда количество оборотов становятся, по существу, равным целевому количеству оборотов, как показано на фиг.21(c), гидравлические тормоза 60А, 60 В включаются, и электродвигатели 2А, 2B выводят крутящие моменты рекуперативного торможения, в результате чего, как показано на фиг.21(d), электродвигатель 2А может выполнить заряд, и электродвигатель 2B может выполнять помощь движению.
Поток управления гидравлического контроллера устройства 1 привода будет описан со ссылкой на фиг.22.
Вначале, на этапе S01, показанном на фиг.22, детектируют состояние транспортного средства (скорость транспортного средства, угол поворота и степень АР открывания педали акселератора). Затем, на этапе S02, устройство 46 оценки состояния движения определяет по состоянию транспортного средства, требуется или нет привод от электродвигателей 2А, 2B устройства 1 привода.
Если отсутствует запрос на привод, последовательность обработки заканчивается (этап S03). Если, на этапе S03, присутствует запрос на привод, затем определяют на этапе S04, поворачивает ли транспортное средство или нет. Если транспортное средство поворачивает, запрашиваемые крутящие моменты Tlmr, Trmr левого и правого электродвигателей 2А, 2B рассчитывают на этапе S05 по состоянию движения с помощью калькулятора 47 крутящего момента. На этапе S06, затем запрашиваемые крутящие моменты Tlmr, Trmr устанавливают, как указанные значения крутящих моментов Tlm, Trm. В это время крутящий момент вспомогательного привода имеет положительное значение, и крутящий момент рекуперативного торможения имеет отрицательное значение. На этапе S07, рассчитывают сумму указанных значений крутящих моментов Tlm, Trm левого и правого электродвигателей 2А, 2B. Если сумма инструктируемых крутящих моментов Tlm, Trm является положительной, то есть, если крутящий момент вспомогательного привода больше, чем крутящий момент рекуперативного торможения, одностороннюю муфту 50 автоматически включают, и, поэтому, последовательность процессов заканчивается. С другой стороны, если, на этапе S07, сумма указанных значений крутящих моментов Tlm, Trm является отрицательной, а именно, если крутящий момент рекуперативного торможения больше, чем крутящий момент вспомогательного привода, гидравлические тормоза 60А, 60B включают, для того, чтобы соединить левые и правые электродвигатели 2А, 2B с осями 10А, 10B (этап S08).
Если, на этапе S04, транспортное средство не поворачивается, то есть, если транспортное средство движется прямо, запрашиваемый крутящий момент Tmr левого и правого электродвигателей 2А, 2B рассчитывают на этапе S09 по состоянию движения. Во время движения по прямой, как описано выше, запрашиваемые крутящие моменты левого и правого электродвигателей 2А, 2B имеют одинаковое значение. На этапе S10, затем определяют, выполняется ли вспомогательный привод или нет. Если выполняется вспомогательный привод, односторонняя муфта 50 автоматически включается, и, если, на этапе S10, вспомогательный привод не выполняется, то есть, если выполняется рекуперативное торможение, гидравлические тормоза 60А, 60B включаются для соединения левого и правого электродвигателей 2А, 2B с осями 10А, 10B (этап S11). На этапе S12, затем запрашиваемый крутящий момент Tmr устанавливают, как указанное значение крутящего момента ТМ.
На фиг.23 показана схема характеристики при движении вперед (движение FWD), при регенерировании во время движения вперед (регенерирование FWD), и при движении назад (движение RVS) от электродвигателей 2А, 2B устройства 1 привода. На чертеже, на верхнем правом участке обозначен крутящий момент оси при движении вперед (движение FWD), на нижнем правом участке обозначен режим регенерирования при движении вперед (регенерирование FRD), и на верхнем левом участке обозначено движение назад (движение RVS).
Как показано на фиг.23, в устройстве 1 привода, крутящие моменты оси при регенерировании FWD и при движении RVS устанавливают меньшими, чем крутящий момент при движении FWD. При регенерировании FWD и при движении RVS, поэтому, выполняют торможение с помощью гидравлических тормозов 60А, 60B, как описано со ссылкой на фиг.12 и 13, но рекуперативный крутящий момент торможения и обратный крутящий момент установлены низкими. Поэтому, может использоваться малая сила торможения, и, следовательно, стационарные пластины 35А, 35B и вращающиеся пластины 36А, 36B могут быть уменьшены по размерам, таким образом, что могут быть уменьшены потери при перекачивании масла, путем установки низкого давления масла.
В соответствии с транспортным средством 3 в описанном выше варианте выполнения, планетарные зубчатые редукторы 12А, 12B расположены на путях силовой передачи между осями 10А, 10B, и электродвигатели 2А, 2B, и односторонняя муфта 50, и гидравлические тормоза 60А, 60B расположены между кольцевыми зубчатыми колесами 24А, 24B планетарных зубчатых редукторов 12А, 12B и кожухом 11 редуктора. Поэтому, электродвигатели 2А, 2B могут быть отсоединены от левой и правой осей 10А, 10B, соответственно, и, следовательно, может быть предотвращено их одновременное вращение.
В случае, когда один из двух электродвигателей 2А, 2B выполняет силовой привод, и другой электродвигатель выполняет рекуперативное торможение, выключением/включением гидравлических тормозов 60А, 60B управляют на основе крутящего момента силового привода и крутящего момента рекуперативного торможения. За счет различного вращения между двумя электродвигателями 2А, 2B во время поворота транспортного средства 3, один из них может выполнять силовой привод, и другой из них может выполнять регенерацию.
В случае, когда один из двух электродвигателей 2А, 2B выполняет силовой привод, и другой электродвигатель выполняет регенерацию, когда крутящий момент рекуперативного торможения больше, чем крутящий момент силового привода, контроллер 48 давления масла управляет гидравлическими тормозами 60А, 60B, чтобы их включить. Когда крутящий момент силового привода возрастает, не требуется включение гидравлических тормозов 60А, 60B. А именно, когда действует крутящий момент силового привода, например, когда транспортное средство 3 начинает движение, включается односторонняя муфта 50. Поэтому, надежность при запуске может быть улучшена, и может быть предотвращена ситуация, в которой электрический масляный насос 70 работает в режиме высокого давления, в состоянии, когда температура масла низкая.
Устройство 46 оценки состояния движения может детектировать движение транспортного средства 3, путем оценки состояния движения транспортного средства 3 на основе скорости транспортного средства 3, степени открытия акселератора и угла поворота.
Изобретение не ограничивается описанным выше вариантом выполнения, и может быть, соответственно, подвергнуто модификации, улучшению и т.д.
Транспортное средство 3 в соответствии с вариантом выполнения не ограничено гибридным транспортным средством, и может представлять собой любое транспортное средство, включая в себя два электродвигателя, которые могут независимо выводить силу привода в правую и левую ведущие оси, такие как электромобиль или транспортное средство на топливных элементах.
Хотя гидравлические тормоза 60А, 60B были представлены, как примеры тормозов, тормоза не ограничиваются ими. Можно использовать другие известные тормоза, такие как электромагнитные тормоза.
Данная заявка базируется на заявке на японский патент (№2009-180061), поданной 31 июля 2009 г., полное раскрытие которой представлено здесь в качестве ссылки.
Реферат
Изобретение относится к электромеханическому приводу транспортного средства с раздельным приводом. Транспортное средство содержит два электродвигателя, планетарные зубчатые редукторы, однонаправленное устройство передачи мощности, тормоз, устройство оценки состояния движения, калькулятор крутящего момента и контроллер. Два электродвигателя выполнены с возможностью вывода движущих сил на правую и левую ведущие оси независимо. Планетарные зубчатые редукторы установлены в каналах силовой передачи между ведущими осями и электродвигателями. Тормоз предназначен для соединения/разъединения первых элементов вращения и кожуха редуктора и выполнен с возможностью двусторонней передачи мощности вращения электродвигателей к ведущим осям в состоянии соединения. При этом, когда транспортное средство движется вперед, один из двух электродвигателей приводит в движение транспортное средство. Другой электродвигатель выполняет рекуперативное торможение, а контроллер выполнен с возможностью разъединения или приведения в действие тормоза на основе момента мощности вращения одного из двух электродвигателей, который приводит в движение транспортное средство, и крутящего момента рекуперативного торможения другого электродвигателя, который выполняет рекуперативное торможение. Достигается повышение эффективности устройства. 2 з.п. ф-лы, 25 ил.
Формула
два электродвигателя, выполненные с возможностью вывода движущих сил в правую и левую ведущие оси независимо, соответственно;
планетарные зубчатые редукторы, установленные в каналах силовой передачи между ведущими осями и электродвигателями;
однонаправленное устройство передачи мощности, расположенное между первыми элементами вращения планетарных зубчатых редукторов и кожухом редуктора, в котором установлены планетарные зубчатые редукторы для передачи однонаправленной мощности вращения;
тормоз, предназначенный для соединения/разъединения первых элементов вращения и кожуха редуктора и выполненный с возможностью двусторонней передачи мощности вращения электродвигателей к ведущим осям в состоянии соединения;
устройство оценки состояния движения, предназначенное для оценивания состояния движения транспортного средства;
калькулятор крутящего момента для вычисления крутящих моментов двух указанных электродвигателей и
контроллер, предназначенный для управления тормозом на основе состояния движения транспортного средства, оцененного устройством оценки состояния движения,
в котором
при движении транспортного средства вперед оба электродвигателя выполнены с возможностью приведения в движение транспортного средства, контроллер выполнен с возможностью разъединения тормоза, и
при движении транспортного средства вперед оба электродвигателя выполнены с возможностью рекуперативного торможения, а контроллер выполнен с возможностью приведения в действие тормоза,
причем когда транспортное средство движется вперед, один из двух электродвигателей приводит в движение транспортное средство, при этом другой электродвигатель выполняет рекуперативное торможение, а контроллер выполнен с возможностью разъединения или приведения в действие тормоза на основе момента мощности вращения одного из двух электродвигателей, который приводит в движение транспортное средство, и крутящего момента рекуперативного торможения другого электродвигателя, который выполняет рекуперативное торможение.
Комментарии