Транспортное средство с гибридным приводом и способ управления им - RU2381930C2
Код документа: RU2381930C2
Чертежи
Описание
Уровень техники изобретения
Область техники, к которой относится изобретение
Изобретение имеет отношение к транспортному средству с гибридным приводом, оснащенному двигателем внутреннего сгорания и электрическим двигателем как источниками энергии, в котором передние колеса и задние колеса приводятся в движение независимо друг от друга электрическим двигателем, и способу управления этим транспортным средством с гибридным приводом. Конкретнее, изобретение имеет отношение к устройству переключения управления, которое переключает между движением с приводом на одну ось, в котором ведущими являются или передние колеса, или задние колеса, и движением с полным приводом, в котором ведущими являются и передние колеса, и задние колеса, а также способ управления им.
Описание предшествующего уровня техники
Некоторые транспортные средства с гибридным приводом оснащены двигателем внутреннего сгорания и электрическим двигателем, который также может производить электричество (в дальнейшем именуемый "электрический двигатель"), как источники энергии сконструированы так, что передние колеса и задние колеса приводятся в движение независимо друг от друга, используя электрический двигатель. Например, одно известное транспортное средство с гибридным приводом сконструировано так, что передние колеса приводятся в движение двигателем внутреннего сгорания и электрическим двигателем, а задние колеса приводит в движение другой электрический двигатель, отличный от того, который приводит в движение передние колеса. В таком транспортном средстве с гибридным приводом два метода приведения в движение могут легко быть реализованы простым переключением между функционированием и нефункционированием одного из электрических двигателей, из числа электрического двигателя, предусмотренного для передних колес, и электрического двигателя, предусмотренного для задних колес. Эти методы приведения в движение являются движением с приводом на одну ось, в котором только передние колеса или только задние колеса приводятся в движение, и движением с полным приводом, в котором приводятся в движение и передние колеса, и задние колеса.
То, какой из этих двух методов приведения в движение должен использоваться, зависит от переменных параметров управления, касающихся движения транспортного средства, таких как скорость транспортного средства, уклон дороги, по которой движется транспортное средство, сила тяги, необходимая транспортному средству, угол поворота транспортного средства и различие в скорости вращения между передними и задними колесами. Полный привод используется, когда необходима большая сила тяги, такая как при трогании с места из неподвижного состояния, ускорении или преодолении подъема, или при движении на дороге с низким коэффициентом трения, такой как ледяная дорога. Распределяя силу тяги, необходимую транспортному средству, между всеми четырьмя колесами, сила тяги может быть надежно передана между каждым колесом и поверхностью дороги. С другой стороны, привод на одну ось обычно используется, если транспортному средству не требуется большая сила тяги, и транспортное средство приводится в движение на дорогах с достаточно высоким коэффициентом трения. Движение с приводом на одну ось потребляет меньше топлива и мощности, чем движение с полным приводом, до тех пор, пока колеса не проскальзывают. С транспортным средством с гибридным приводом, таким как описано выше, привод на одну ось требуется только, чтобы электроэнергия поставлялась электрическому двигателю, только для одной колесной пары, то есть только электрическому двигателю для передних колес или электрическому двигателю для задних колес. Поэтому электрические потери между вторичной батареей и электрическим двигателем низкие, таким образом, расход энергии уменьшается, когда транспортное средство находится в движении.
Кроме того, транспортные средства с гибридным приводом реализуют различные режимы движения, используя двигатель внутреннего сгорания и электрический двигатель выборочно или в комбинации. Некоторые примеры этих режимов движения включают "Режим движения HV", который использует двигатель внутреннего сгорания и электрический двигатель вместе как источник движения, "Режим движения на двигателе внутреннего сгорания", который использует только двигатель внутреннего сгорания как источник движения, и «Режим движения EV», который использует только электрический двигатель как источник движения. Эти режимы движения могут быть автоматически переключены последовательно в зависимости от степени зарядки (в дальнейшем именуемой просто "SOC") вторичной батареи, которая поставляет электроэнергию электрическому двигателю, и необходимой силы тяги и т.п.
Некоторые транспортные средства с гибридным приводом, имеющие такие разновидности режимов движения, оснащаются "выключателем EV" в кабине транспортного средства, чтобы позволить владельцу намеренно выбрать «Режим движения EV». Когда выключатель EV включен, транспортное средство переведено в режим движения EV. Например, международная публикация No. 00/05094 предлагает обеспечить в транспортном средстве рычаг, который позволяет владельцу переключиться с движения с использованием двигателя внутреннего сгорания как источника движения (то есть режим движения от двигателя внутреннего сгорания и режим движения HV) в режим движения EV. Владелец принудительно переводит транспортное средство в режим движения EV, управляя этим выключателем EV или рычагом. В результате, транспортное средство может двигаться бесшумно, потому что оно движется в режиме движения EV, то есть не используя двигатель внутреннего сгорания. Соответственно, этот выключатель EV полезен в случаях, таких как движение ночью через жилые районы.
Когда транспортное средство с гибридным приводом движется в режиме движения EV, то есть движется с использованием только электрического двигателя как источника энергии, электроэнергия, поставляемая из вторичной батареи на электрический двигатель становится силой, которая приводит в движение транспортное средство. Поэтому, расстояние хода транспортного средства, когда движение происходит в режиме движения EV, определяется SOC вторичной батареи. Когда SOC вторичной батареи от непрерывного движения в режим движения EV уменьшается, двигатель внутреннего сгорания может быть задействован, чтобы зарядить вторичную батарею. В это время, режим движения EV автоматически отменяется устройством управления транспортного средства. То есть выключатель EV выключен, и запущен двигатель внутреннего сгорания.
Таким образом, даже если владелец выбирает режим движения EV выключателем EV, режим движения EV может быть вскоре отменен из-за низкого SOC вторичной батареи, что является проблемой в смысле коммерческой выгоды. Чтобы препятствовать этому, можно увеличивать расстояние хода в режиме движения EV, увеличивая размер вторичной батареи, но это увеличило бы вес вторичной батареи и требуемое место установки вторичной батареи. Поэтому, когда водитель оперирует выключателем EV и переключает режим движения в режим движения EV, желательно уменьшить расход энергии электрического двигателя в максимально возможной степени, чтобы увеличить расстояние хода в режиме движения EV.
В транспортном средстве с гибридным приводом, которое может двигаться, переключаясь последовательно между полным приводом и движением с приводом на одну ось, таком как описано выше, условие для того, чтобы переключить между двумя и четырьмя ведущими колесами, то есть, область, в которой транспортное средство работает с полным приводом, установлено соответственно заранее, проверкой соответствующих параметров управления, относящиеся к движению транспортного средства. Область, в которой транспортное средство работает с полным приводом, обычно выбирается, чтобы подчеркнуть сильные эксплуатационные качества и не принимает во внимание способность восстанавливать энергию, двигаясь в режиме движения EV, который был выбран владельцем, управляющим выключателем EV. Поэтому, существует потребность в технологии, которая позволит уменьшить расход энергии в режим движения EV, который был выбран с выключателем EV, соответствуя сильным эксплуатационным качествам в течение нормального движения.
Сущность изобретения
Это изобретение обеспечивает транспортное средство с гибридным приводом, в котором расход энергии может быть уменьшенным, когда выключатель EV включен, а также способ управления этим транспортным средством с гибридным приводом.
Первый объект изобретения имеет отношение к транспортному средству с гибридным приводом. Это транспортное средство с гибридным приводом снабжено средством для установки условия движения с полным приводом, которое является условием для переключения с движения с приводом на одну ось, при котором, приводится в движение одна колесная пара, из числа передних колес и задних колес, на движение с полным приводом, при котором и передние колеса, и задние колеса приводятся в движение, и выключателем EV, который, когда включен владельцем транспортного средства, переводит транспортное средство в режим движения EV, при котором только электрический двигатель используется как источник энергии.
Средство установки условия движения с полным приводом изменяет условие движения с полным приводом, уменьшая область, в которой транспортное средство работает с полным приводом, когда выключатель EV включен, по сравнению с тем, когда выключатель EV выключен. Когда выключатель EV включен, то есть, когда транспортное средство движется в режиме движения EV, который был выбран владельцем транспортного средства, оперирующим выключателем EV, область, в которой транспортное средство работает с полным приводом, уменьшена по сравнению с тем, когда движется в обычном режиме, и область, в которой транспортное средство работает в режиме движения с приводом на одну ось пропорционально увеличена. В результате транспортное средство чаще работает в режиме движения с приводом на одну ось, таким образом, уменьшая расход энергии.
Условие движения с полным приводом может включать условие коэффициента скольжения, вычисленного, и различия в скоростях вращения между передними колесами и задними колесами, равного или большего, чем определенный коэффициент скольжения, который является заданным пороговым значением, а средство установки условия движения с полным приводом может установить более высокое значение коэффициента скольжения, когда выключатель EV включен, чем тогда, когда выключатель EV выключен.
Условие движения с полным приводом может также включать условие, когда транспортное средство трогается с места из неподвижного состояния, уклон дороги в этот момент будет равен или больше, чем определенный уклон дороги, который является заданным пороговым значением, и условие, когда скорость транспортного средства будет равна или меньше, чем определяющая скорость транспортного средства, которая является заданным пороговым значением, а средство выбора условия движения с полным приводом может установить определенный уклон дороги в более высокое значение, и установить определенную скорость транспортного средства в более низкое значение, когда выключатель EV включен, чем тогда, когда выключатель EV выключен.
Кроме того, средство установки условия движения с полным приводом может включать средство, определяющее изменения условия для определения, должно ли условие движения с полным приводом, когда выключатель EV выключен, быть изменено на условие движения с полным приводом, когда выключатель EV включен. Средство, определяющее изменения условия, препятствует изменению условия движения с полным приводом, когда коэффициент скольжения равен или больше, чем предопределенное пороговое значение, или когда уклон дороги равен или больше, чем предопределенное пороговое значение.
Этот первый объект изобретения позволяет уменьшить расход энергии в транспортном средстве с гибридным приводом при управлении в режиме движения EV, выбранного выключателем EV.
Второй объект изобретения имеет отношение к способу управления транспортным средством с гибридным приводом, который оснащен двигателем внутреннего сгорания и электрическим двигателем как источниками энергии и в котором передние колеса и задние колеса приводятся в движение независимо друг от друга электрическим двигателем. Этот способ управления отличается включением шагов определения одного из двух, включен ли выключатель EV, который, когда включен владельцем транспортного средства, переводит транспортное средство в режим движения EV, в котором только электрический двигатель используется как источник энергии; и изменяет условие движения с полным приводом, которое является условием для переключения с движения с приводом на одну ось, при котором приводится в движение одна колесная пара из числа передних колес и задних колес, на движение с полным приводом, при котором приводятся в движение и передние колеса, и задние колеса, уменьшая область, в которой транспортное средство работает с полным приводом, когда выключатель EV включен, по сравнению с тем, когда выключатель EV выключен.
Этот второй объект изобретения позволяет уменьшить расход энергии в транспортном средстве с гибридным приводом при управлении в режиме движения EV, выбранного с выключателем EV.
Краткое описание чертежей
Упомянутые выше и дальнейшие цели, особенности и преимущества изобретения станут очевидными из следующего описания предпочтительных вариантов реализации со ссылкой на сопровождающие чертежи, в которых одинаковые ссылочные обозначения используются, чтобы представить подобные элементы, и где:
Фиг.1 схематично показывает транспортное средство с гибридным приводом согласно одному примерному варианту реализации изобретения; и
Фиг.2 - блок-схема, иллюстрирующая управление, выполняемое в транспортном средстве с гибридным приводом согласно способу реализации.
Подробное описание предпочтительных вариантов осуществления
В следующем описании и сопровождающих чертежах настоящее изобретение более подробно будет описано посредством примерных вариантов реализации. Транспортное средство с гибридным приводом, в котором передние колеса приводятся в движение двигателем внутреннего сгорания и электрическим двигателем, а задние колеса приводятся в движение другим электрическим двигателем, будет описано как один пример.
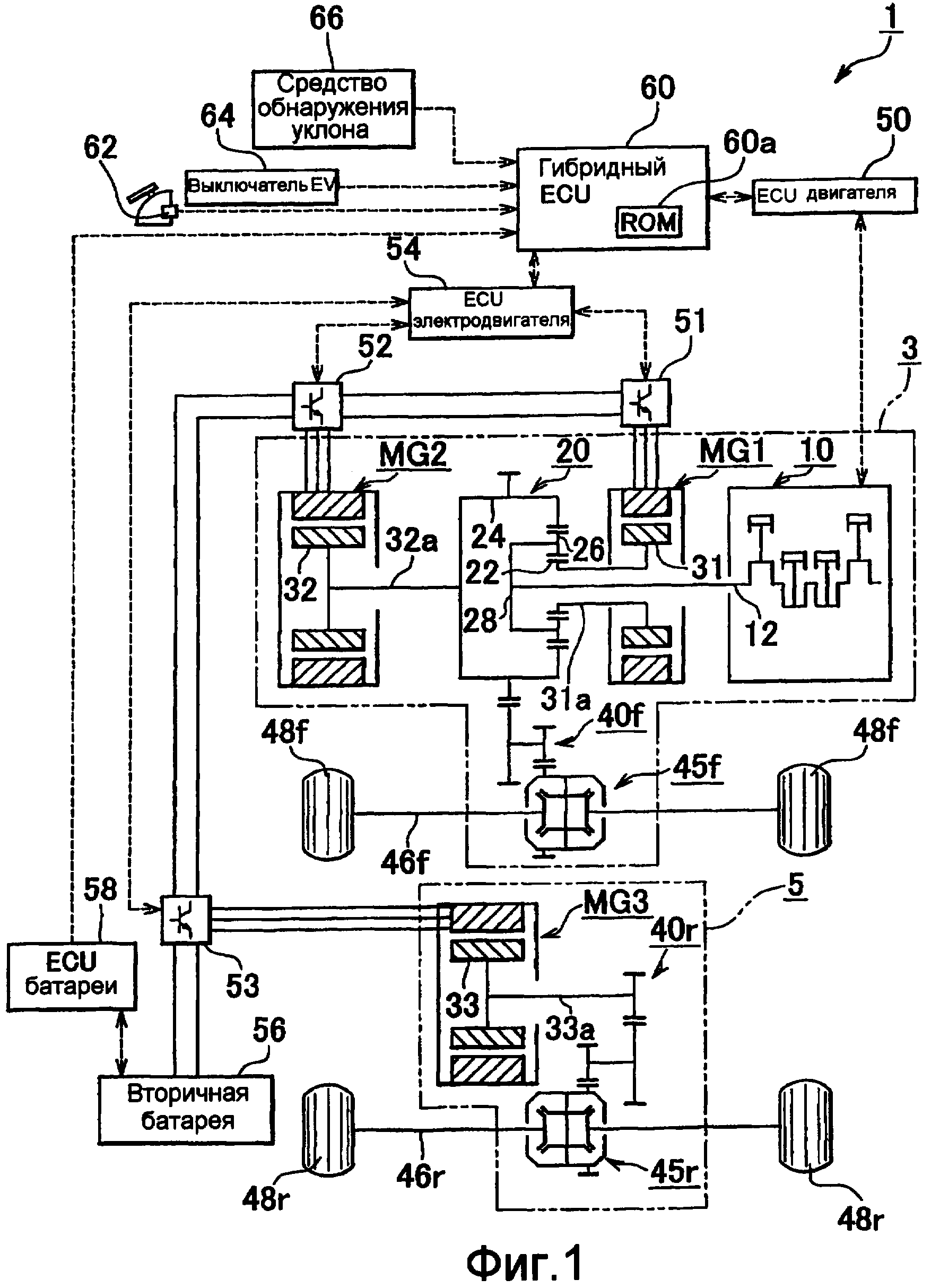
Первая структура транспортного средства 1 с гибридным приводом согласно этому примерному варианту реализации будет описана в отношении Фиг.1. Фиг.1 - вид, представляющий схематическую структуру транспортного средства 1 с гибридным приводом. Чтобы привести в движение транспортное средство 1 с гибридным приводом, оно снабжено блоком 3 приведения в движение передних колес, который приводит в движение передние колеса 48f, и блоком 5 приведения в движение задних колес, который приводит в движение задние колеса 48r. Блок 3 приведения в движение передних колес содержит, как источник энергии, двигатель внутреннего сгорания 10 и электрические двигатели MG1 и MG2, которые способны производить электричество. При этом блок 5 приведения в движение задних колес содержит, как источник энергии, электрический двигатель MG3. Соответственно, передние колеса 48f и задние колеса 48r приводятся в движение независимо друг от друга.
Двигатель внутреннего сгорания 10 имеет устройство системы впрыска топлива, устройство зажигания и дроссельный клапан, которые не показаны. Этими устройствами управляет электронный блок управления двигателя (в дальнейшем именуемый "ECU двигателя"). Поэтому ECU двигателя может регулировать энергию, произведенную двигателем внутреннего сгорания 10, которая потом является выходной мощностью от коленчатого вала 12.
При этом электрические двигатели, MG1, MG2 и MG3, все являются так называемыми двигателями-генераторами, которые могут функционировать и как электрические двигатели, которые преобразовывают подаваемое электричество в энергию, и как генераторы, которые преобразовывают выходную мощность в электричество. Инверторы 51, 52, и 53, предусмотренные для каждого из электрических двигателей MG1, MG2, и MG3, соответственно, управляют переключением этих функций, а также механической мощностью, произведенной электрическими двигателями MG1, MG2 и MG3, или мощностью, извлеченной электрическими двигателями MG1, MG2 и MG3. Эти инверторы 51, 52 и 53, все связаны с вторичной батареей 56, таким образом, что электричество может быть передано между вторичной батареей 56 и каждым из электрических двигателей MG1, MG2 и MG3. Этой передачей электричества управляет электронный блок 54 управления двигателем (в дальнейшем именуемый "ECU электродвигателя"). Соответственно, ECU 54 электродвигателя может управлять электрическими двигателями MG1, MG2 и MG3 через инверторы 51, 52 и 53. Мощность, произведенная электрическими двигателями MG1, MG2 и MG3, является тогда продукцией от вращающихся валов 31a, 32a и 33a, которые, соответственно, соединены с роторами 31, 32 и 33 от электрических двигателей MG1, MG2 и MG3.
В блоке 3 приведения в движение передних колес, в дополнение к двигателю внутреннего сгорания 10 и электрическим двигателям MG1 и MG2, описанным выше, полностью соединены вместе: планетарный комплект 20, который делит выходную мощность от двигателя внутреннего сгорания 10, редуктор 40f, который увеличивает вращающий момент, замедляя вращение, переданное от планетарного комплекта 20, и дифференциал 45f, который распределяет мощность, переданную от редуктора 40f к левым и правым ведущим осям 46f. Электрический двигатель MG1 главным образом используется как генератор, в то время как электрический двигатель MG2 главным образом используется как электрический двигатель.
Коленчатый вал 12 двигателя внутреннего сгорания 10 соединен с водилом планетарной передачи 28 планетарного комплекта 20, ротор 31 электрического двигателя MG1 соединен с солнечной шестерней 22 планетарного комплекта 20, и ротор 32 электрического двигателя MG2 соединен с зубчатым венцом 24 планетарного комплекта 20. Выходная мощность двигателя внутреннего сгорания 10 от коленчатого вала 12 разделена на мощность, переданную на солнечную шестерню 22, и мощность, переданную на зубчатый венец 24. Мощность, переданная от двигателя внутреннего сгорания 10 на солнечную шестерню 22, передается электрическому двигателю MG1, где она используется для генерации электричества. При этом мощность, переданная от двигателя внутреннего сгорания 10 на зубчатый венец 24, объединяется с выходной мощностью от электрического двигателя MG2 и затем передается от кольцевого механизма 24 на редуктор 40f. Мощность, переданная от редуктора 40f к центральной шестерне планетарной передачи 45f, тогда распределяется правой и левой осям двигателя 46f, чтобы привести в движение передние колеса 48f.
Таким образом, структурируя устройство приведения в движение передних колес 3, электрический двигатель MG2 производит механическую мощность из электричества, поставляемого вторичной батареей 56. Тогда эта механическая мощность используется, чтобы привести в движение передние колеса 48f, таким образом, приводя в движение транспортное средство 1. Кроме того, в течение замедления транспортного средства механическая мощность, переданная от передних колес 48f электрическому двигателю MG2, может быть преобразована в электричество и возвращена вторичной батарее 56.
С другой стороны, в блоке 5 приведения в движение задних колес в дополнение к электрическому двигателю MG3, описанному выше, содержится редуктор 40r, который увеличивает вращающий момент, замедляя вращение, переданное от электрического двигателя MG3 и центральной шестерни планетарной передачи 45r, которая распределяет мощность, переданную от редуктора 40r к левым и правым осям двигателя 46r, соединенным вместе. Выходная мощность от электрического двигателя MG3 передается от редуктора 40r к центральной шестерне планетарной передачи 45r, где она распределяется правой и левой осям двигателя 46r, чтобы привести в движение задние колеса 48r.
Таким образом, структурируя блок 5 приведения в движение задних колес, электрический двигатель MG3 производит механическую мощность из электричества, поставляемого вторичной батареей 56, аналогично электрическому двигателю MG2. Тогда эта механическая мощность используется, чтобы привести в движение задние колеса 48r, таким образом, приводя в движение транспортное средство 1. Кроме того, в течение замедления транспортного средства механическая мощность, переданная от задних колес 48r электрическому двигателю MG3, может быть преобразована в электричество и возвращена вторичной батарее 56.
Транспортное средство 1 с гибридным приводом также оснащено гибридным электронным блоком 60 управления (в дальнейшем именуемым "гибридный ECU"), который управляет всей системой транспортного средства 1. Кроме того, транспортное средство 1 оснащено датчиком 62 положения акселератора, который определяет величину нажатия педали акселератора и выводит начальную величину сигнала акселератора гибридного ECU 60. Тогда гибридный ECU 60 вычисляет силу тяги, требуемую транспортному средству (в дальнейшем именуемая "требуемая сила тяги") согласно начальной величине сигнала акселератора, которая была введена. Основываясь на этой рассчитанной необходимой движущей силе, гибридный ECU 60 определяет мощность, которая будет произведена двигателем внутреннего сгорания 10 и электрическими двигателями MG1, MG2, и MG3, и посылает команды индикации этого на ECU 50 двигателя внутреннего сгорания и ECU 54 электродвигателя, описанные выше. После получения команд ECU 50 двигателя внутреннего сгорания и ECU 54 электродвигателя управляют двигателем внутреннего сгорания 10 и электрическими двигателями (MG1, MG2, MG3), соответственно. Таким образом, двигатель внутреннего сгорания 10 и электрические двигатели (MG1, MG2, MG3) управляются, чтобы работать в координации друг с другом согласно состоянию движения транспортного средства, в том числе, когда транспортное средство остановлено.
Транспортное средство 1 с гибридным приводом также оснащено блоком 58 контроля состояния батареи (в дальнейшем названный "ECU батареи"), который контролирует состояние вторичной батареи и выводит сигнал, указывающий на состояние заряда (в дальнейшем называемое "SOC") вторичной батареи 56 для гибридного ECU 60. Затем, основываясь на этой SOC вторичной батареи и рассчитанной необходимой силе тяги, гибридный ECU 60 автоматически переключает режим движения, соответственно, между "Режимом движения HV", в котором двигатель внутреннего сгорания 10 и электрические двигатели (MG1, MG2, MG3) используется вместе как источник энергии, «Режимом движения на двигателе внутреннего сгорания», в котором только двигатель внутреннего сгорания 10 используется как источник движения, и «Режимом движения EV», в котором только электрические двигатели (MG1, MG2, MG3) используются как источник энергии.
Транспортное средство 1 с гибридным приводом также оснащено выключателем EV 64, который позволяет владельцу транспортного средства 1 намеренно выбрать Режим движения EV. Этот выключатель EV 64 располагается в доступном владельцу транспортного средства месте, таком как приборная панель в кабине транспортного средства. Когда владелец включает выключатель EV 64, это обнаруживается гибридным ECU 60. Затем гибридный ECU 60, который обнаружил, что выключатель EV 64 был включен, управляет двигателем внутреннего сгорания 10 так, чтобы он не работал, контролируя достижение необходимой силы тяги, управляя только электрическими двигателями MG2 и MG3. Таким образом, включением выключателя EV 64 транспортное средство может быть принудительно переведено в режим движения EV, в котором только электрические двигатели MG2 и MG3 используются как источник энергии.
Режим движения EV, который выбирается владельцем транспортного средства, переключением выключателя EV 64, таким образом, в дальнейшем именуется как «Выбираемый режим движения EV». В отличие от этого, режим движения EV, который устанавливается, когда гибридный ECU 60 автоматически переключается с другого режима движения (такого, как режим движения на двигателе внутреннего сгорания или режим движения HV) будет называться «автоматический режим движения EV», чтобы отличить его от выбираемого режима движения EV.
Когда SOC вторичной батареи 56 становится низким из-за непрерывного движения в выбираемом режиме движения EV или когда требуемая величина силы тяги не достигается в режиме движения EV, гибридный ECU 60 автоматически выключает выключатель EV 64 и транспортное средство 1 с гибридным приводом переключается в режим движения HV или режим движения на двигателе внутреннего сгорания.
Датчик скорости колеса, непоказанный, который определяет скорость вращения колеса, установлен на всех четырех колесах (48f и 48r) транспортного средства 1 с гибридным приводом. Гибридный ECU 60 получает сигналы скорости вращения колеса от этих датчиков скорости колеса и затем вычисляет скорость вращения переднего колеса, которая является средним значением скоростей вращения левого и правого передних колес 48f, и скорости вращения заднего колеса, которая является средним значением скоростей вращения левого и правого задних колес 48r. Тогда скорость транспортного средства 1 (в дальнейшем именуемая "скорость транспортного средства") определяется либо рассчитанной скоростью вращения переднего колеса или рассчитанной скоростью вращения заднего колеса.
Кроме того, гибридный ECU 60 также вычисляет коэффициент скольжения из различия между скоростью вращения переднего колеса и скоростью вращения заднего колеса. Когда скорость вращения переднего колеса больше, чем скорость вращения заднего колеса, показатель скорости вращения переднего колеса, разделенный на скорость вращения заднего колеса, является коэффициентом скольжения переднего колеса. Когда скорость вращения заднего колеса больше, чем скорость вращения переднего колеса, показатель скорости вращения заднего колеса, разделенный на скорость вращения передних колес 48f, является коэффициентом скольжения заднего колеса. В дальнейшем, коэффициент скольжения переднего колеса и коэффициент скольжения заднего колеса называются «коэффициент скольжения». Коэффициент скольжения может быть вычислен другим электронным блоком управления, который не показан, и результаты вычисления могут быть введены в гибридный ECU 60.
Далее, транспортное средство 1 с гибридным приводом также оснащено средством 66 определения уклона, чтобы определить уклон дороги под транспортным средством 1. Это средство 66 определения уклона вводит сигнал показателя уклона дороги в гибридный ECU 60. Датчик, который не показан, может обнаружить ускорение транспортного средства 1, может вывести сигнал показателя ускорения транспортного средства в продольном направлении в гибридный ECU 60, который тогда может оценить уклон дороги, основанный на сигнале ускорения, когда транспортное средство остановлено.
Как описано выше, гибридный ECU 60 вводит или вычисляет переменные управления, имеющие отношение к управлению транспортным средством, такие как скорость транспортного средства, уклон дороги и коэффициент скольжения. Тогда, основываясь на этих переменных управления, гибридный ECU 60 переключает между приводом на одну ось, в котором только или передние колеса 48f, или задние колеса 48r приводятся в движение, и полным приводом, в котором и передние колеса 48f, и задние колеса 48r приводятся в движение. Гибридный ECU 60 переключает между движением с приводом на одну ось и полным приводом, определяя, соответствует ли состояние движения транспортного средства 1 области работы движения с приводом на одну ось или области работы с полным приводом, основываясь на значениях переменных управления, связанных с управлением. Условие для переключения между движением с приводом на одну ось и полным приводом (в дальнейшем именуемое "условие движения с полным приводом") включает множество предопределенных условий. Каждое условие определено отношениями между переменной управления, касающейся управления, которое было или получено гибридным ECU 60, или вычислено гибридным ECU 60, и предопределенным пороговым значением, то есть постоянным контролем, который был заранее установлен. Постоянный контроль заранее сохранен в ROM 60a гибридного ECU 60.
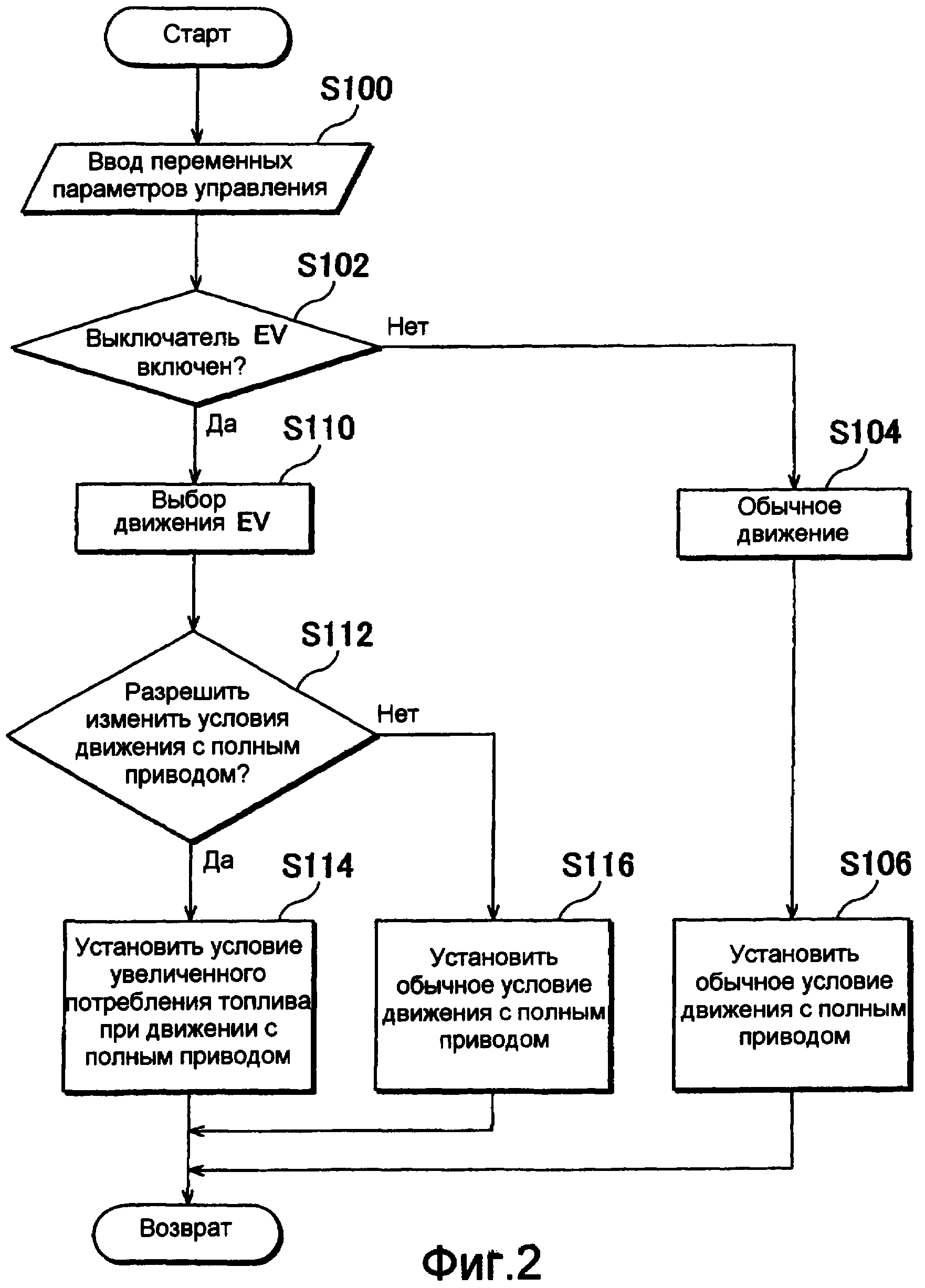
В дальнейшем, способ для установки условия движения с полным приводом данного примерного варианта реализации, то есть постоянный контроль, который выполняет это условие, будет описан со ссылкой на Фиг.2. Фиг.2 это блок-схема, иллюстрирующая контроль для установки условия движения с полным приводом, которое выполнено гибридным ECU 60. В этом способе реализации, когда выключатель EV 64 включен, постоянный контроль условия движения с полным приводом изменяется с тем, чтобы область, в которой транспортное средство работает с полным приводом (то есть область работы с полным приводом), стала меньше.
Сначала, гибридный ECU 60 вводит переменные управления, имеющие отношение к движению транспортного средства, от различных датчиков и электронных блоков управления, описанных выше (шаг S100). В дополнение к скорости транспортного средства, уклону дороги и коэффициенту скольжения переменные управления также включают информацию, касающуюся, например, SOC вторичной батареи 56, необходимую силу тяги, и включен или выключен выключатель EV 64.
Затем, гибридный ECU 60 определяет, включен ли выключатель EV 64 (шаг S102). Если владелец транспортного средства включил выключатель EV 64, процесс продвигается к шагу S110. С другой стороны, если переключатель EV 64 не был включен, то есть выключен, или гибридный ECU 60 автоматически выключает выключатель EV 64 из-за низкого SOC вторичной батареи 56, независимо от того, было ли он первоначально включен владельцем, процесс переходит к шагу S104.
Когда переключатель EV 64 выключен, транспортное средство 1 с гибридным приводом движется в «обычном режиме движения» (шаг S104). "Обычный режим движения" в этом случае включает режим движения на двигателе внутреннего сгорания, в котором выбран и используется только двигатель внутреннего сгорания 10 как источник энергии, режим движения HV, в котором двигатель внутреннего сгорания 10 и электрические двигатели (MG1, MG2, MG3) используются вместе как источник энергии, и автоматический режим движения EV, в котором только электрические двигатели (MG1, MG2, MG3) выбраны и используются как источник энергии в результате автоматического переключения режима гибридного ECU 60, то есть этот режим не инициирован владельцем, включающим выключатель EV. Гибридный ECU 60 автоматически последовательно переключает между этими режимами в зависимости от SOC вторичной батареи 56 и необходимой силы тяги.
В это время, гибридный ECU 60 устанавливает условие движения с полным приводом в «обычное условие движения с полным приводом» (шаг S106). Это обычное условие движения с полным приводом включает также условие коэффициента скольжения (переменный параметр управления), равного или большего, чем установленный коэффициент скольжения (постоянный параметр управления), который является заданным пороговым значением, равным 0,05, и условие уклона дороги (переменный параметр управления), когда транспортное средство трогается с места из неподвижного состояния под уклоном, равным или большим, чем определенный уклон дороги, который является заданным пороговым значением, равным 6 градусам, и скорость транспортного средства (переменный параметр управления), равная или меньшая, чем определенная скорость транспортного средства (переменный параметр управления), которая является заданным пороговым значением, равным 25 км/ч. Когда по крайней мере одно из этих условий выполнено, гибридный ECU 60 выполняет контроль, чтобы привести в движение и передние колеса 48f, и задние колеса 48r, при котором транспортное средство 1 с гибридным приводом работает в режиме движения с полным приводом.
С другой стороны, если в шаге S102 определено, что выключатель EV 64 включен, то транспортное средство 1 с гибридным приводом движется в выбранном режиме движения EV (шаг S110). Транспортное средство 1 с гибридным приводом продолжает двигаться в выбранном режиме движения EV до снижения SOC вторичной батареи 56, которая равна или меньше, чем предопределенное значение, или если требуется мощность, которая больше, чем может быть достигнута в режиме движения EV.
В этом случае, определяется, должно ли условие движения с полным приводом быть изменено из нормального условия движения с полным приводом в "увеличенное потребление топлива при движении с полным приводом", которое будет описано позже (шаг S112). Например, когда коэффициент скольжения равен или больше, чем 0,07 или когда уклон дороги, по которой движется транспортное средство, равен или больше чем 7 градусов, условию запрещается изменяться из нормального условия движения с полным приводом до условия увеличенного потребления топлива при движении с полным приводом, и процесс переходит к шагу S116. Тем не менее, в любом другом случае разрешается изменение в условии движения с полным приводом и процесс переходит к шагу S114.
В шаге S114 гибридный ECU 60 устанавливает условие движения с полным приводом в условие увеличенного потребления топлива при движении с полным приводом (шаг S114). Это условие увеличенного потребления топлива при движении с полным приводом включает, например, условие, при котором коэффициент скольжения равен или больше, чем определенный коэффициент скольжения, который является заданным пороговым значением, равным 0,10, и условие, при котором уклон дороги, когда транспортное средство трогается с места из неподвижного состояния под уклоном, равен или больше, чем определенный уклон дороги, который является заданным пороговым значением, равным 8 градусам, и скорость транспортного средства является 5 км/ч или меньше. При этом условии увеличенного потребления топлива при движении с полным приводом определенный коэффициент скольжения и определенный уклон дороги, в котором режим переключен с режима движения с приводом на одну ось в режим движения с полным приводом, установлены на более высокие значения, чем когда они находятся в нормальных условиях движения с полным приводом. Кроме того, определенная скорость транспортного средства, на которой режим переключен с движения с полным приводом в режим движения с приводом на одну ось, когда трогается с места из неподвижного состояния под уклоном, устанавливается на более низкое значение, нежели когда находится в нормальном условии движения с полным приводом.
Изменяя условие на этот вид условия увеличенного потребления топлива при движении с полным приводом, транспортным средством 1, которое работает в режиме движения с приводом на одну ось, даже если значения переменных управления, таких как коэффициент скольжения и уклона дороги, увеличиваются из-за изменения в состоянии движения, гораздо сложнее достичь определенного коэффициента скольжения и определенного уклона дороги, таким образом, транспортное средство 1 не переключается в режим движения с полным приводом, как без труда это делает в нормальных условиях движения с полным приводом. Кроме того, транспортным средством 1, которое работало с полным приводом, трогаясь с места из неподвижного состояния под уклоном, если скорость транспортного средства увеличилась, легче достичь определенной скорости транспортного средства и таким образом легче вернуться к движению с приводом на одну ось из режима движения с полным приводом в условии увеличенного потребления топлива при движении с полным приводом, чем когда оно находится в обычном условии движения с полным приводом. Таким образом, условие увеличенного потребления топлива при движении с полным приводом изменяет значения констант управления, которые составляют условие движения с полным приводом, по сравнению с обычным условием движения с полным приводом, уменьшая область, в которой транспортное средство 1 работает в режиме движения с полным приводом, и пропорционально увеличивая область, в которой транспортное средство 1 работает в режиме движения с приводом на одну ось.
Тем временем, в шаге S116, гибридный ECU 60 устанавливает условие движения в режиме с полным приводом в обычное условие движения с полным приводом точно так же, как это делает, когда включен переключатель EV 64. Это препятствует транспортному средству, которое работало в режиме движения с полным приводом внезапно переключиться на движение с приводом на одну ось, из-за условия движения с полным приводом, изменяющегося из нормального условия движения с полным приводом в условия увеличенного потребления топлива при движении с полным приводом, когда включен переключатель EV 64, при управлении с высоким коэффициентом скольжения или путешествуя где-нибудь, где крутой уклон дороги. В результате, можно помешать оказать отрицательное влияние на дорожные качества автомобиля в результате изменения в условии движения с полным приводом, когда был включен переключатель EV 64.
В предшествующем примерном варианте реализации изменено условие движения с полным приводом, чтобы уменьшить область, в которой транспортное средство 1 работает с полным приводом, когда переключатель EV 64 включен, по сравнению с тем, когда переключатель EV 64 выключен. Когда переключатель EV 64 включен, то есть когда транспортное средство 1 движется в выбранном режиме движения EV, который был выбран владельцем транспортного средства 1, оперирующим переключателем EV 64, область, в которой транспортное средство работает с полным приводом, уменьшена по сравнению с тем, когда транспортное средство движется в обычном режиме, и область, в которой транспортное средство работает в режиме движения с приводом на одну ось, пропорционально увеличена. Таким образом, изменением условия движения с полным приводом увеличивается периодичность, с которой транспортное средство 1 работает с приводом на одну ось, таким образом уменьшая расход энергии в выбранном режиме движения EV. В результате расстояние хода, в выбранном режиме движения EV, может быть увеличено.
В этом примерном варианте реализации условие движения с полным приводом изменено изменением значений констант управления, таких как определенный коэффициент скольжения, определенный уклон дороги и определенная скорость транспортного средства. Изобретение этим не ограничено, тем не менее, пока условие движения с полным приводом изменяется так, что уменьшается область, в которой транспортное средство работает с полным приводом. Например, область, в которой транспортное средство работает с полным приводом, может быть уменьшена, изменением фактического типа параметра, который составляет условие движения с полным приводом.
Также в предшествующем примерном варианте реализации условие для определения, изменять ли условие движения с полным приводом (в дальнейшем именуемое "определение изменения условия") определено коэффициентом скольжения и уклоном дороги во время движения транспортного средства. Определение изменения условия не ограничено этим условием, тем не менее, пока условию движения с полным приводом препятствуют измениться, когда метод движения пытается измениться на движение с приводом на одну ось в момент, когда условие движения с полным приводом меняется на условие увеличенного потребления топлива при движении с полным приводом, когда был включен переключатель EV 64. Например, когда выключатель EV включен при работе транспортного средства с полным приводом, изменение в условии движения с полным приводом может быть отсрочено после того, как изменится состояние движения транспортного средства и транспортное средство переключится из режима движения с полным приводом, согласно нормальному условию движения с полным приводом, на движение с приводом на одну ось.
Хотя изобретение было описано в отношении примерных вариантов его реализации, должно быть понятно, что изобретение не ограничено этими вариантами реализации или конструкциями. Напротив, изобретение предназначено охватывать различные модификации и эквивалентные устройства. Кроме того, несмотря на то, что различные элементы примерных вариантов реализации показаны в различных комбинациях и конфигурациях, которые являются примерными, другие комбинации и конфигурации, включая больше, меньше или только один элемент, также находятся в рамках сущности и объема изобретения.
Реферат
Изобретение относится к гибридным транспортным средствам с полным приводом. Устройство содержит двигатель внутреннего сгорания, электрический двигатель, средство установки условия движения с полным приводом, выключатель. Способ заключается в определении, включен ли выключатель, который при включении переводит транспортное средство в режим движения с использованием только электрического двигателя. Устанавливают условие движения с полным приводом. Изменяют условие движения с полным приводом. Уменьшают область, в которой транспортное средство работает с полным приводом, когда выключатель включен, по сравнению с тем, когда выключатель выключен. Технический результат заключается в уменьшении расхода энергии. 2 н. и 3 з.п. ф-лы, 2 ил.
Комментарии