Устройство управления движущей силой для гибридного транспортного средства - RU2657625C1
Код документа: RU2657625C1
Чертежи













Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления движущей силой для гибридного транспортного средства, которое допускает изменение режима между EV-режимом, в котором только электромотор используется в качестве источника приведения в движение, и HEV-режимом, в котором электромотор и двигатель внутреннего сгорания используются в качестве источников приведения в движение.
Документы предшествующего уровня техники
[0002] Традиционно, известно гибридное транспортное средство, которое содержит двигатель внутреннего сгорания и мотор и которое допускает изменение режима между EV-режимом, в котором только электромотор используется в качестве источника приведения в движение, и HEV-режимом, в котором электромотор и двигатель внутреннего сгорания используются в качестве источников приведения в движение (например, см. патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. Выложенная заявка на патент Японии № 2014-101065
Сущность изобретения
Задача, решаемая изобретением
[0004] Между тем, в традиционном гибридном транспортном средстве, если приводная система не имеет элемента передачи мощности (элемента поглощения дифференциального вращения), который поглощает дифференциальное вращение фрикционной муфты и т.п., движущая сила, которая выводится посредством двигателя внутреннего сгорания и электромотора, непосредственно передается на ведущие колеса. Таким образом, если двигатель внутреннего сгорания запускается, и режим переходит из EV-режима в HEV-режим при движении, движущая сила двигателя внутреннего сгорания суммируется с движущей силой электромотора, и сумма передается как движущая сила на ведущие колеса. Следовательно, движущая сила, которая передается на ведущие колеса, внезапно увеличивается, и возникает толчок при изменении режима.
С другой стороны, даже если движущая сила, требуемая водителем, не изменена, возникают случаи, в которых режим переходит из EV-режима в HEV-режим вследствие изменения скорости транспортного средства. В такое время, чувствительность водителя к толчку является высокой, и водитель с большой вероятностью должен испытывать дискомфорт.
[0005] С учетом вышеописанных проблем, задача настоящего изобретения состоит в том, чтобы предоставлять устройство управления движущей силой для гибридного транспортного средства, которое не имеет элемента поглощения дифференциального вращения, при этом толчок при изменении режима, который возникает, когда режим переходит из EV-режима в HEV-режим, должен ощущаться с меньшей вероятностью, даже когда чувствительность водителя к толчку является высокой.
Средство решения задачи
[0006] Чтобы решать задачу, описанную выше, гибридное транспортное средство настоящего изобретения допускает изменение режима между EV-режимом, в котором только электромотор используется в качестве источника приведения в движение, и HEV-режимом, в котором электромотор и двигатель внутреннего сгорания используются в качестве источников приведения в движение, и не имеет элемента поглощения дифференциального вращения в качестве части приводной системы. Помимо этого, гибридное транспортное средство содержит модуль управления движущей силой, который управляет движущей силой, передаваемой на ведущие колеса, в соответствии с требуемой движущей силой в диапазоне максимальной выводимой движущей силы источника приведения в движение.
После этого, когда режим переходит из EV-режима в HEV-режим в соответствии с изменением скорости транспортного средства, этот модуль управления движущей силой ограничивает движущую силу, передаваемую на ведущие колеса в HEV-режиме, в соответствии с максимальной выводимой движущей силой в EV-режиме во время изменения режима.
Преимущества изобретения
[0007] В случае гибридного транспортного средства, которое не имеет элемента поглощения дифференциального вращения в качестве части приводной системы, движущая сила, которая выводится из источника приведения в движение, непосредственно передается на ведущие колеса. Напротив, в настоящем изобретении, когда режим переходит из EV-режима в HEV-режим в соответствии с изменением скорости транспортного средства, движущая сила, передаваемая на ведущие колеса в HEV-режиме, ограничена в соответствии с максимальной выводимой движущей силой в EV-режиме во время изменения режима.
Соответственно, даже если движущая сила двигателя внутреннего сгорания суммируется с движущей силой электромотора в качестве движущей силы, передаваемой на ведущие колеса вследствие изменения режима на HEV-режим, можно подавлять внезапное увеличение движущей силы, которая передается на ведущие колеса. Толчок при изменении режима в силу этого подавляется, и можно не допускать возникновения у водителя дискомфорта, даже если чувствительность водителя к толчку является высокой, поскольку режим переходит из EV-режима в HEV-режим в соответствии с изменением скорости транспортного средства.
Таким образом, в гибридном транспортном средстве, которое не имеет элемента поглощения дифференциального вращения, можно обеспечивать то, что толчок при изменении режима, который возникает, когда режим переходит из EV-режима в HEV-режим, испытывается с меньшей вероятностью, даже когда чувствительность водителя к толчку является высокой.
Краткое описание чертежей
[0008] Фиг. 1 является общим системным видом, иллюстрирующим приводную систему и систему управления гибридного транспортного средства, к которой применяется устройство управления движущей силой первого варианта осуществления.
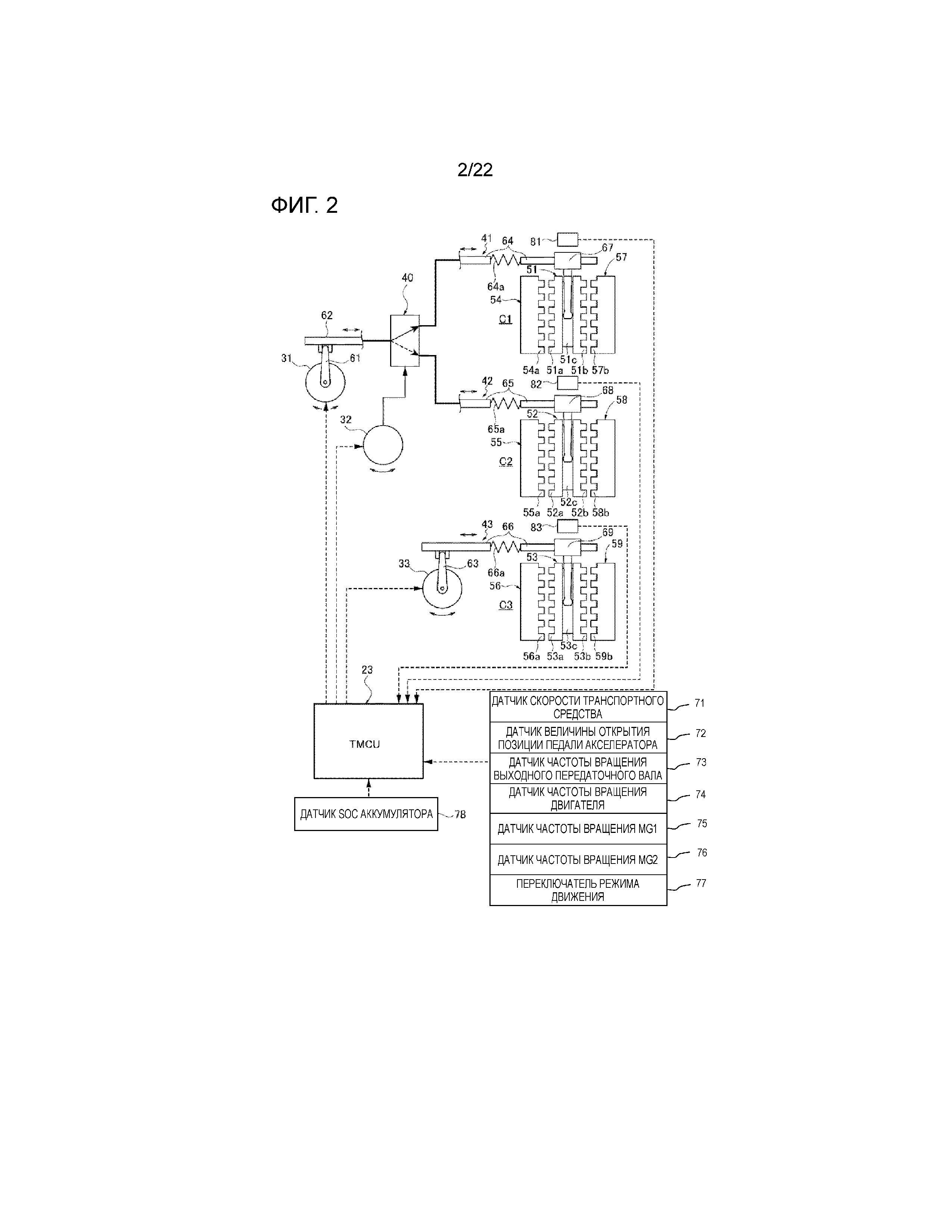
Фиг. 2 является блок-схемой системы управления, иллюстрирующей конфигурацию системы управления переключением передач многоступенчатой зубчатой трансмиссии первого варианта осуществления.
Фиг. 3 является кратким схематичным видом карты переключения передач, иллюстрирующей принцип переключения схемы переключения передач многоступенчатой зубчатой трансмиссии первого варианта осуществления.
Фиг. 4 является таблицей состояний зацепления, иллюстрирующей ступени переключения передач согласно позициям переключения трех зацепляющих муфт в многоступенчатой зубчатой трансмиссии первого варианта осуществления.
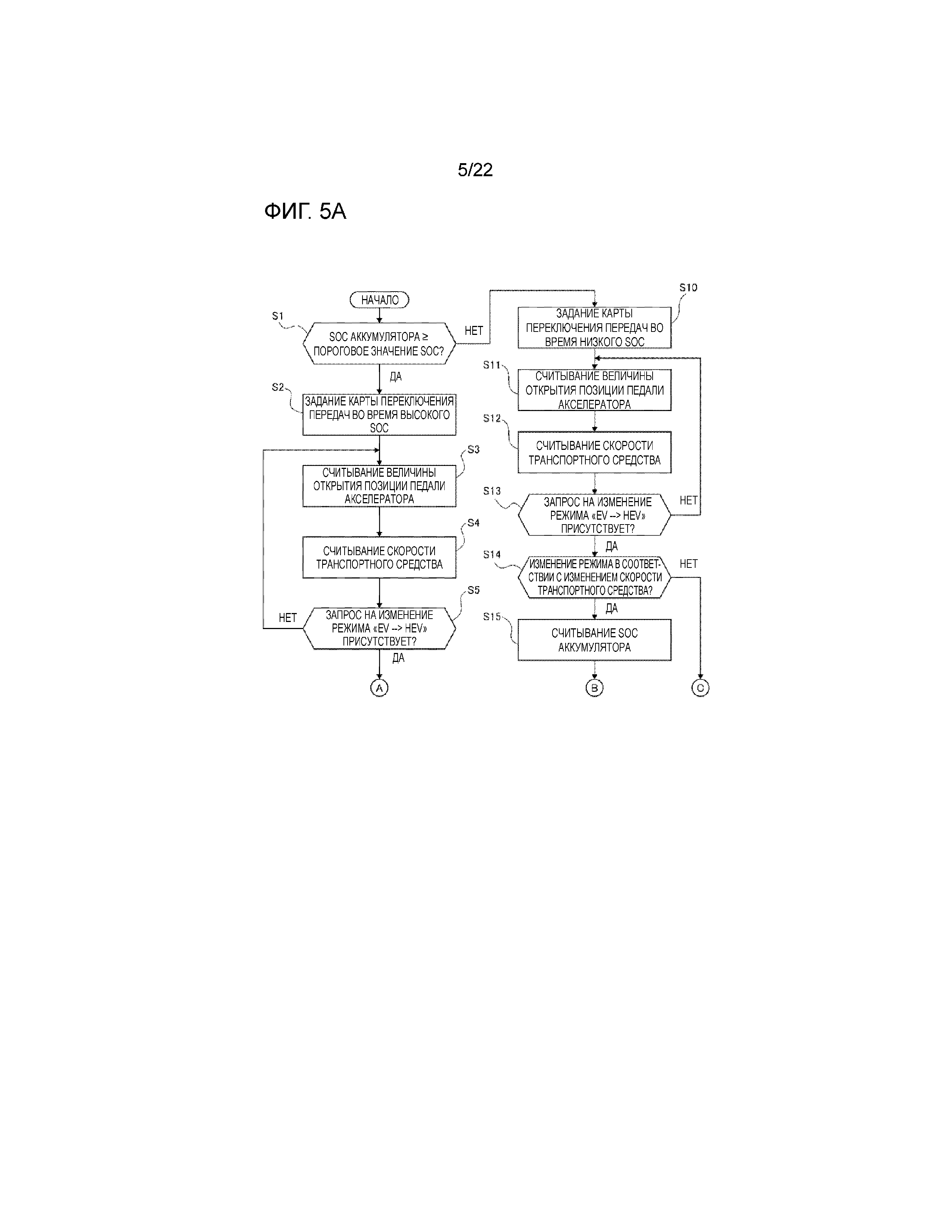
Фиг. 5A является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса управления движущей силой (этапы S1-S5, этапы S10-S15), который выполняется в первом варианте осуществления.
Фиг. 5B является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса управления движущей силой (этапы S6-S9, этапы S16-S19), который выполняется в первом варианте осуществления.
Фиг. 6 является одним примером карты переключения передач, используемой во время высокого SOC в первом варианте осуществления.
Фиг. 7 является одним примером карты переключения передач, используемой во время низкого SOC в первом варианте осуществления.
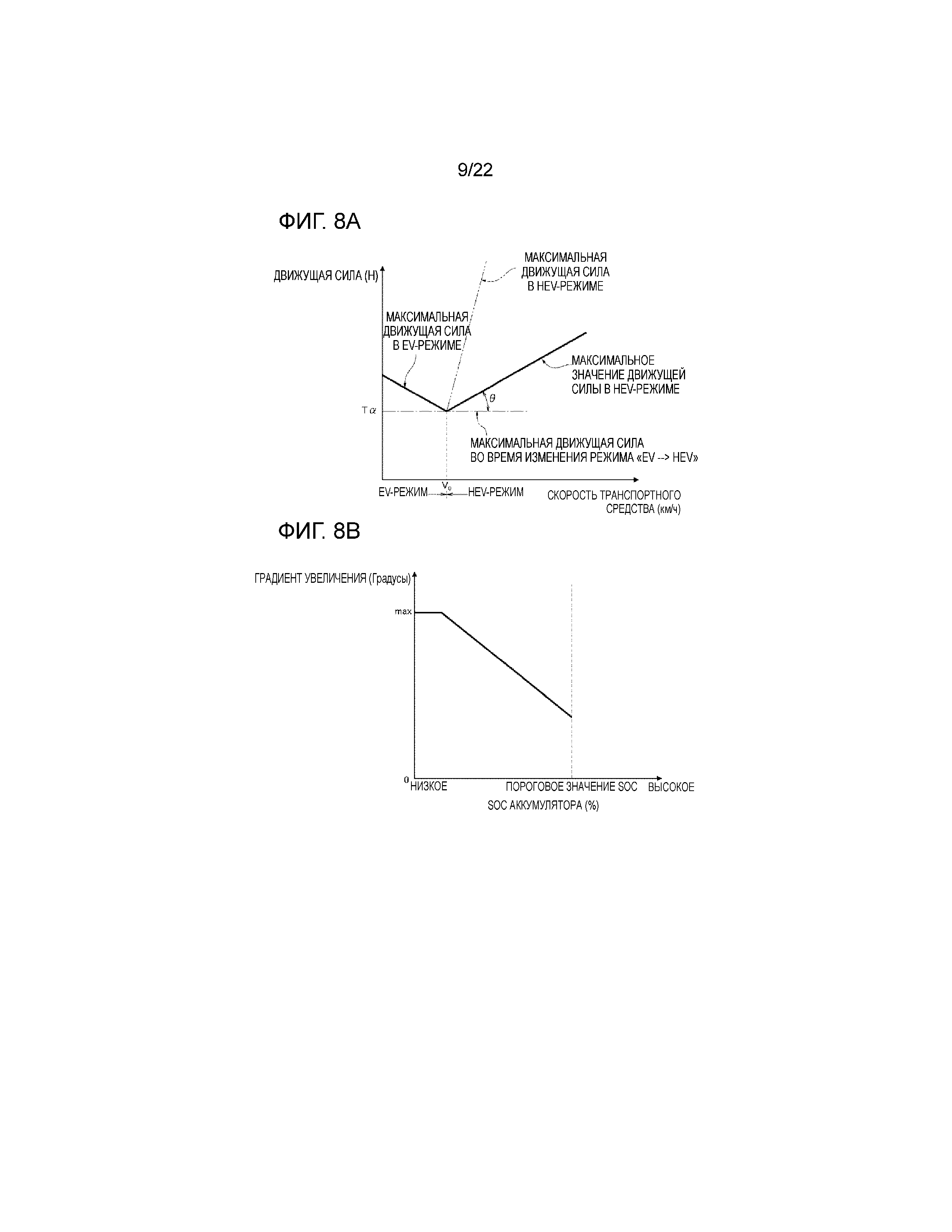
Фиг. 8A является пояснительным видом, показывающим максимальное значение движущей силы в HEV-режиме, которое изменяется согласно увеличению градиента.
Фиг. 8B представляет собой карту задания градиента для задания градиента увеличения максимального значения движущей силы в HEV-режиме во время низкого SOC.
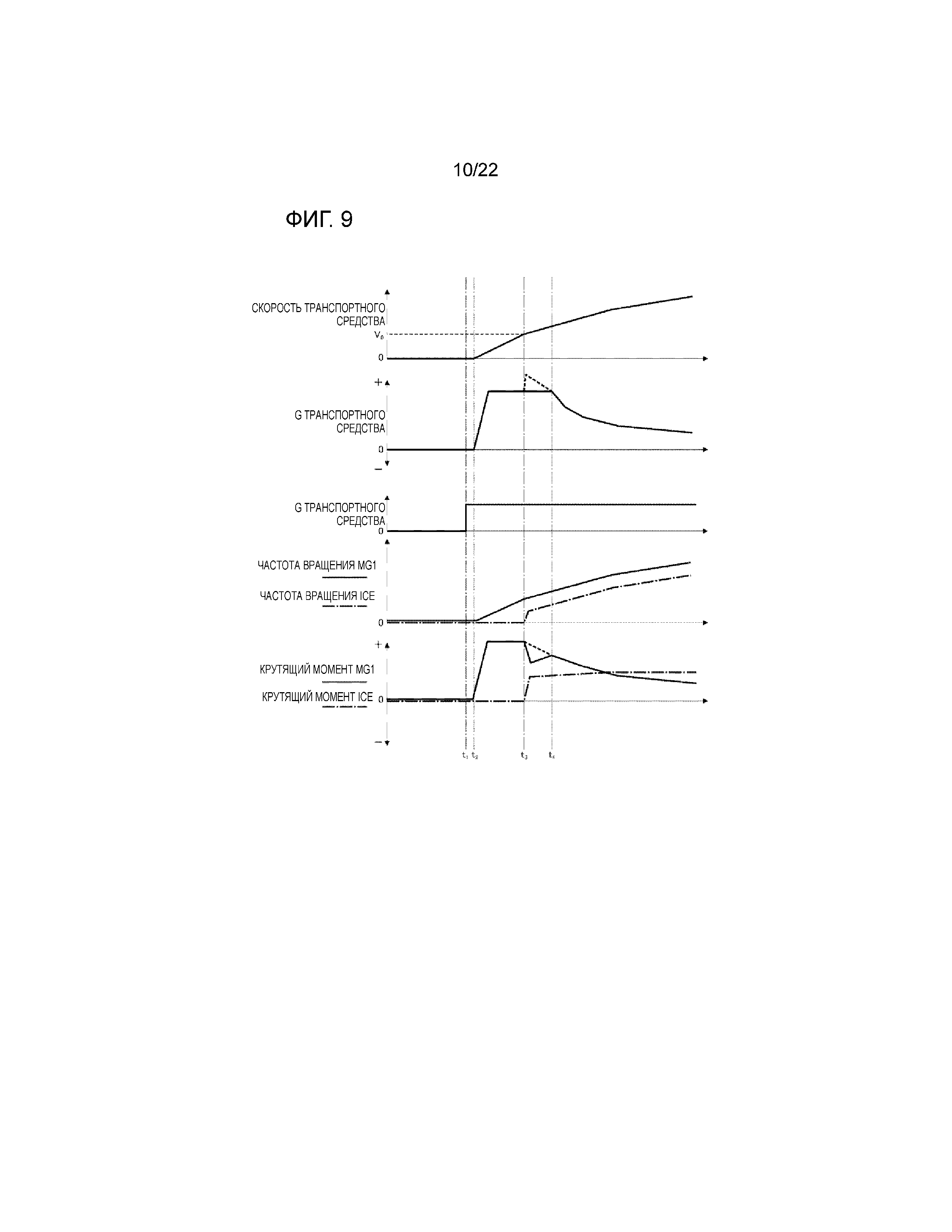
Фиг. 9 является временной диаграммой, иллюстрирующей каждую из характеристик из скорости транспортного средства/G транспортного средства/величины открытия позиции педали акселератора/частоты вращения MG1/частоты вращения ICE/крутящего момента MG1/крутящего момента ICE, когда режим переходит из EV --> HEV в соответствии с изменением скорости транспортного средства во время высокого SOC, в первом варианте осуществления.
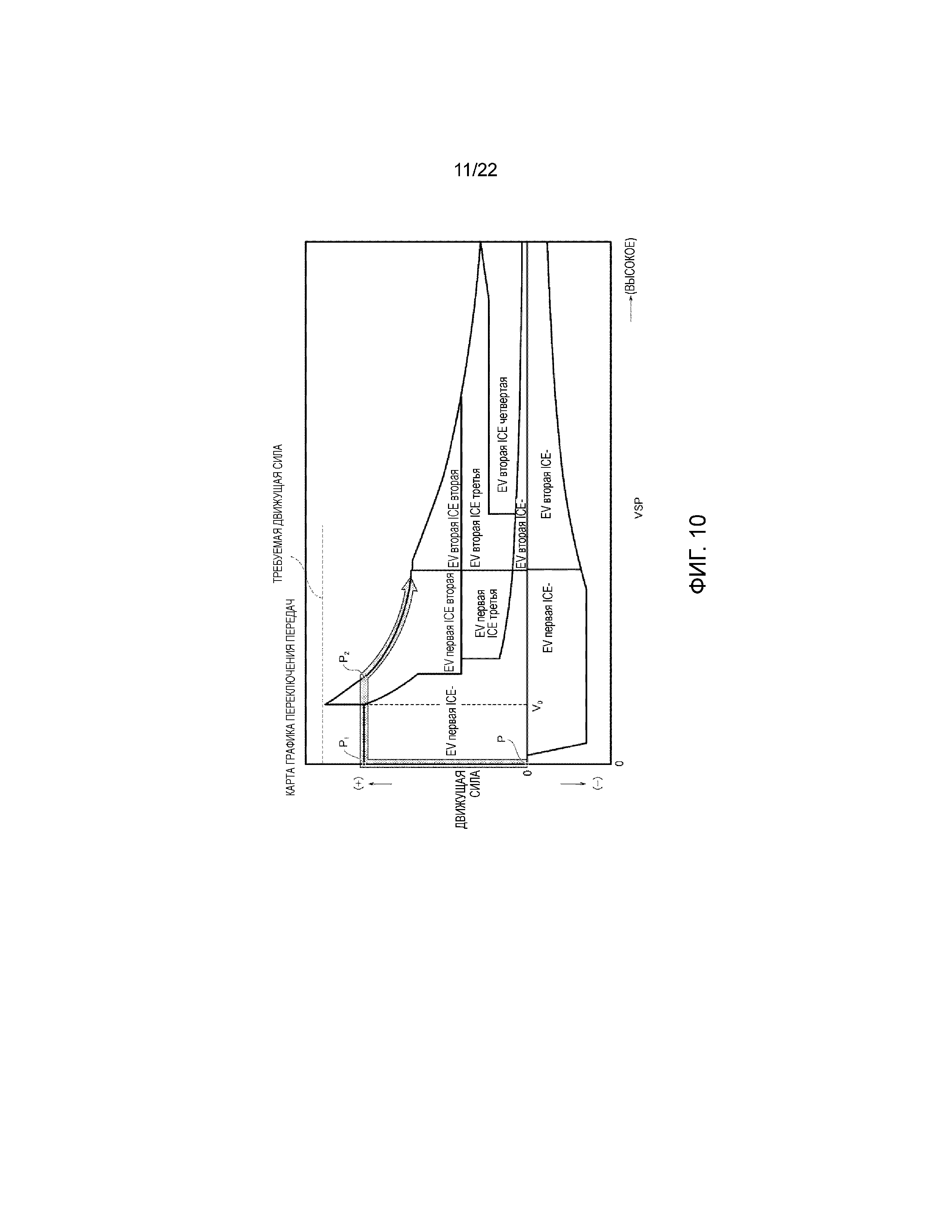
Фиг. 10 является пояснительным видом, иллюстрирующим траекторию перемещения рабочей точки на карте переключения передач, когда режим переходит из "EV --> HEV" в соответствии с изменением скорости транспортного средства во время высокого SOC.
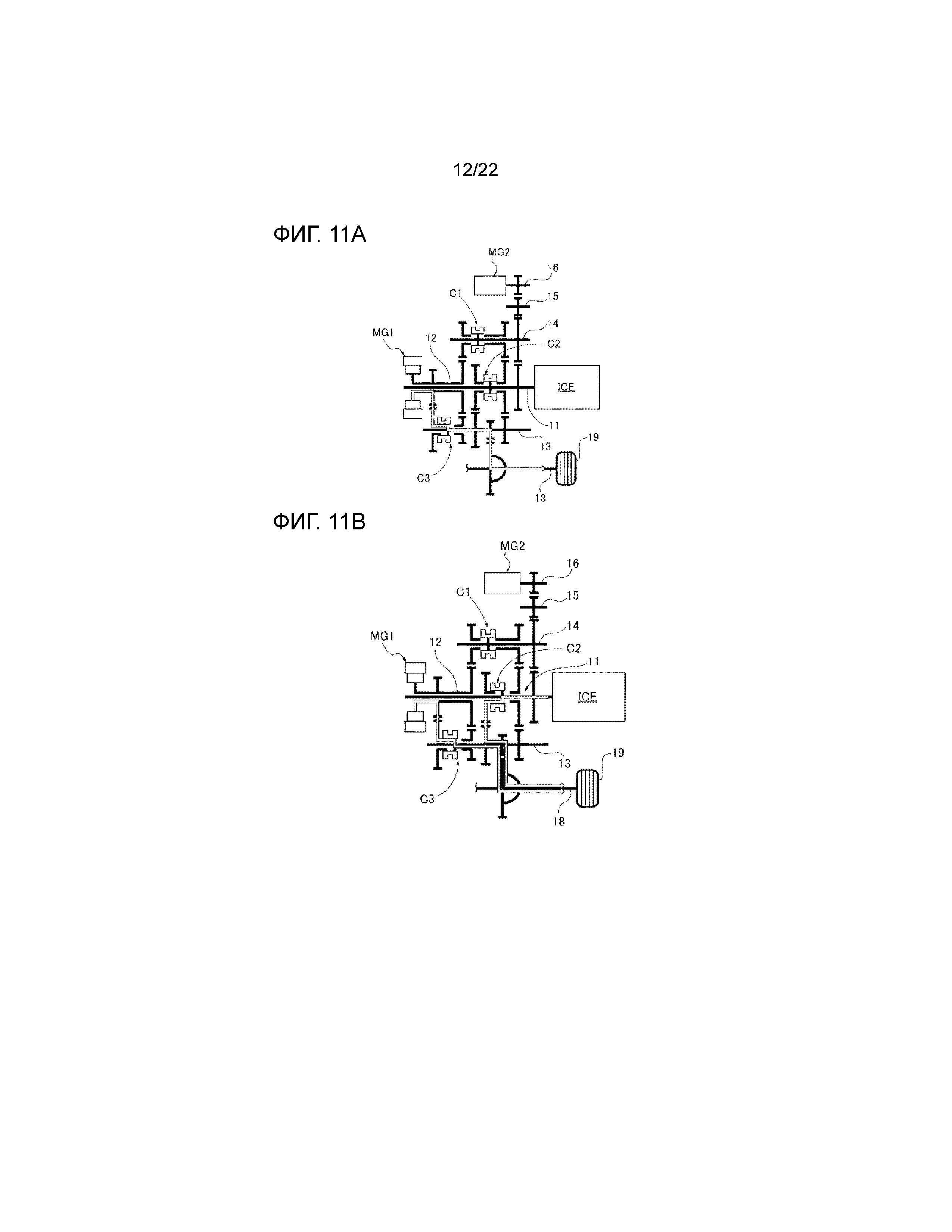
Фиг. 11A является пояснительным видом, иллюстрирующим тракт передачи мощности в EV-режиме во время высокого SOC.
Фиг. 11B является пояснительным видом, иллюстрирующим тракт передачи мощности в HEV-режиме во время высокого SOC.
Фиг. 12 является временной диаграммой, иллюстрирующей каждую из характеристик из скорости транспортного средства/G транспортного средства/величины открытия позиции педали акселератора/частоты вращения MG1/частоты вращения ICE/крутящего момента MG1/крутящего момента ICE, когда режим переходит из EV --> HEV в соответствии с изменением требуемой движущей силы водителя во время высокого SOC, в первом варианте осуществления.
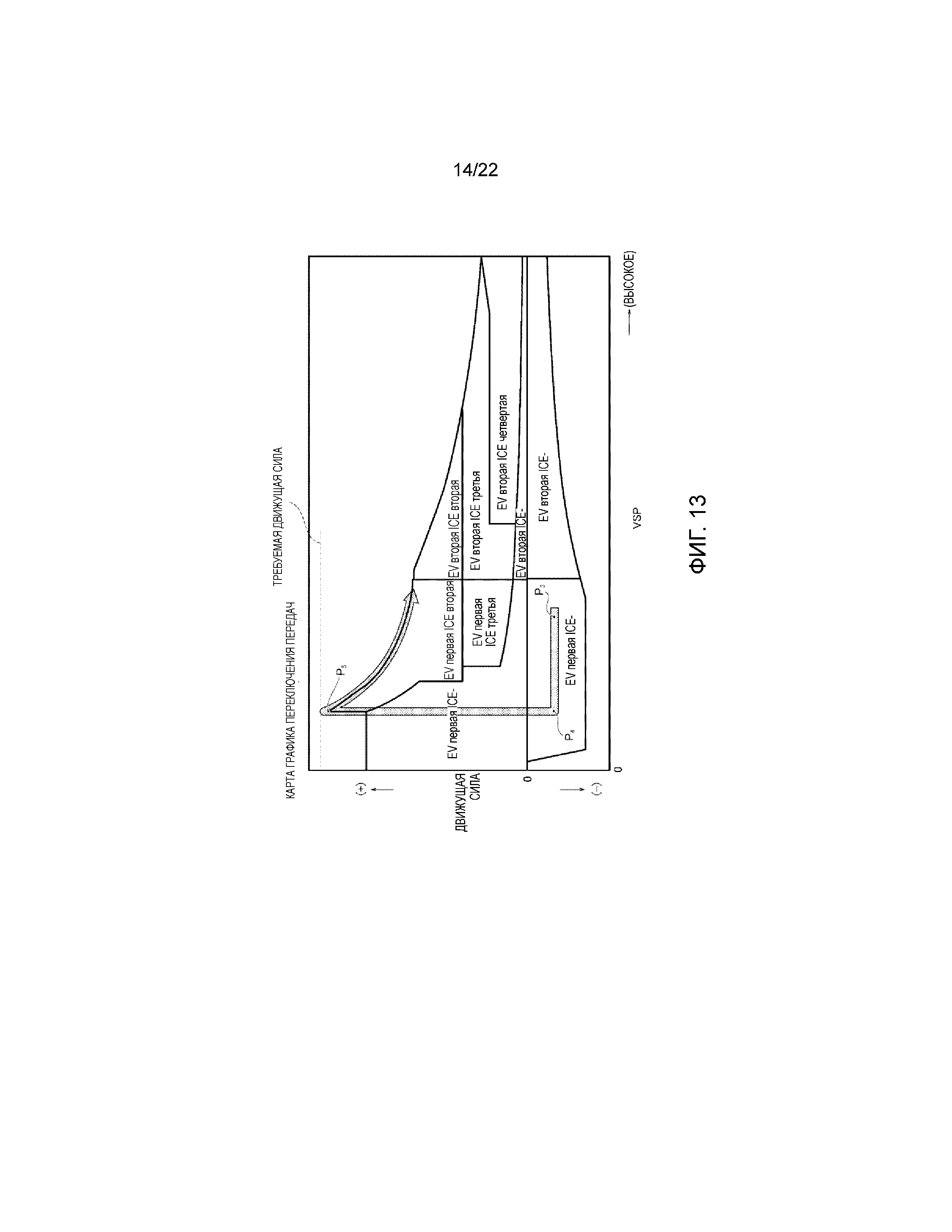
Фиг. 13 является пояснительным видом, иллюстрирующим траекторию перемещения рабочей точки на карте переключения передач, когда режим переходит из EV --> HEV в соответствии с изменением требуемой движущей силы водителя во время высокого SOC.
Фиг. 14 является временной диаграммой, иллюстрирующей каждую из характеристик из скорости транспортного средства/G транспортного средства/величины открытия позиции педали акселератора/частоты вращения MG1/частоты вращения ICE/крутящего момента MG1/крутящего момента ICE, когда режим переходит из EV --> HEV в соответствии с изменением скорости транспортного средства во время низкого SOC, в первом варианте осуществления.
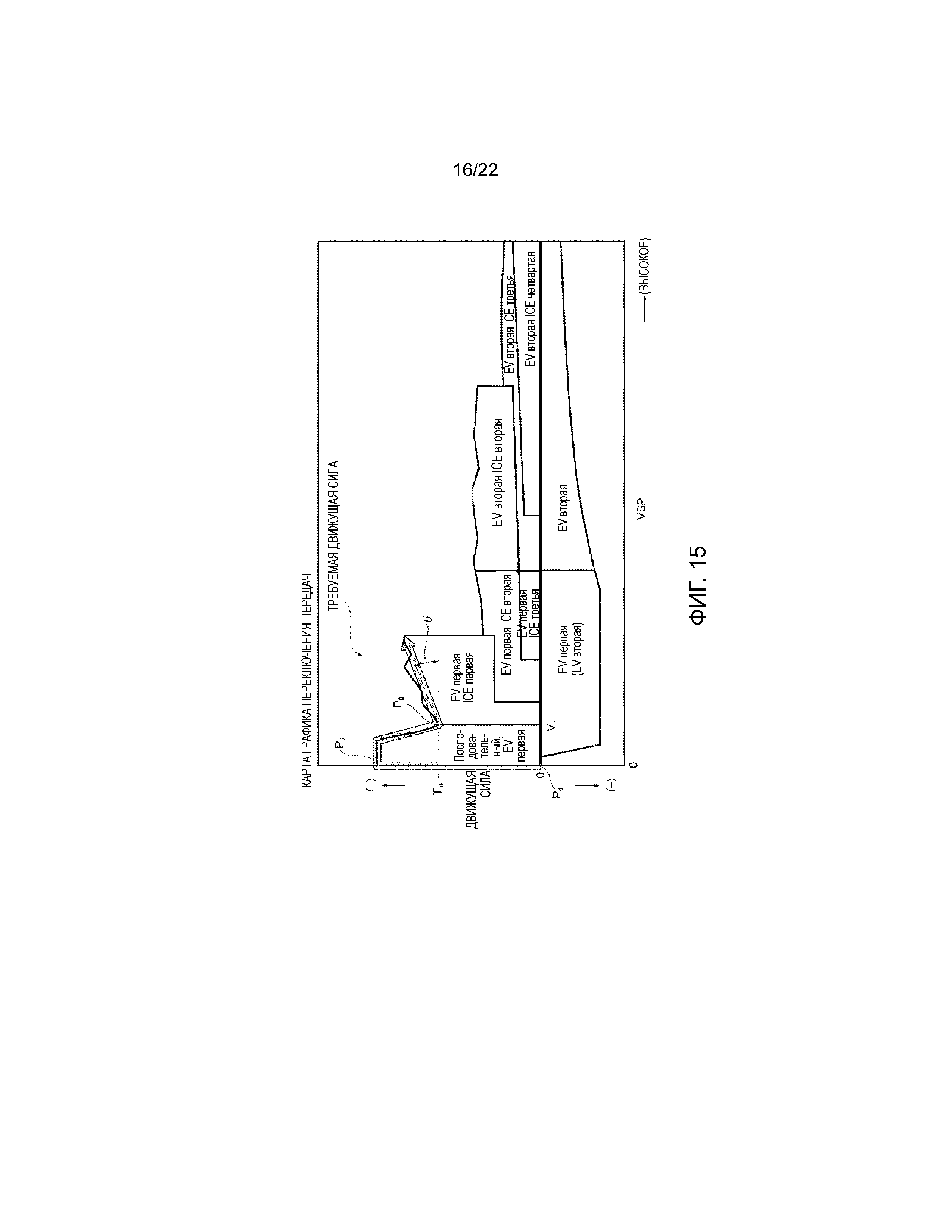
Фиг. 15 является пояснительным видом, иллюстрирующим траекторию перемещения рабочей точки на карте переключения передач, когда режим переходит из EV --> HEV в соответствии с изменением скорости транспортного средства во время низкого SOC.
Фиг. 16A является пояснительным видом, иллюстрирующим тракт передачи мощности в EV-режиме во время низкого SOC.
Фиг. 16B является пояснительным видом, иллюстрирующим тракт передачи мощности в HEV-режиме во время низкого SOC.
Фиг. 17 является одним примером карты переключения передач, используемой во время высокого SOC во втором варианте осуществления.
Фиг. 18 является временной диаграммой, иллюстрирующей каждую из характеристик из скорости транспортного средства/G транспортного средства/величины открытия позиции педали акселератора/частоты вращения MG1/частоты вращения ICE/крутящего момента MG1/крутящего момента ICE, когда режим переходит из EV --> HEV в соответствии с изменением скорости транспортного средства во время высокого SOC, во втором варианте осуществления.
Фиг. 19 является пояснительным видом, иллюстрирующим траекторию перемещения рабочей точки на карте переключения передач, когда режим переходит из EV --> HEV в соответствии с изменением скорости транспортного средства во время высокого SOC.
Фиг. 20 является временной диаграммой, иллюстрирующей каждую из характеристик из скорости транспортного средства/G транспортного средства/величины открытия позиции педали акселератора/частоты вращения MG1/частоты вращения ICE/крутящего момента MG1/крутящего момента ICE, в случае если крутящий момент ICE ограничен, когда режим переходит из EV --> HEV в соответствии с изменением скорости транспортного средства во время высокого SOC, в первом варианте осуществления.
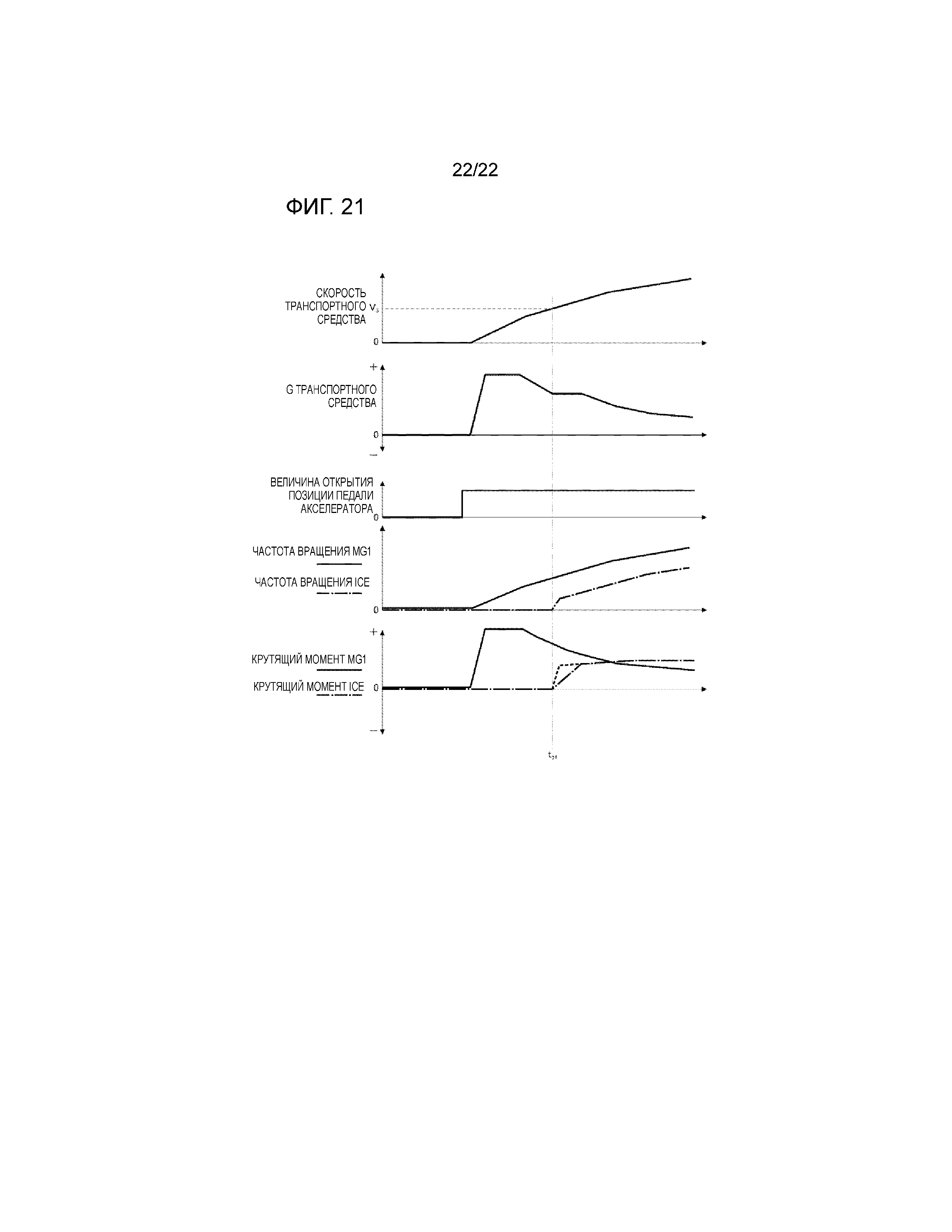
Фиг. 21 является временной диаграммой, иллюстрирующей каждую из характеристик из скорости транспортного средства/G транспортного средства/величины открытия позиции педали акселератора/частоты вращения MG1/частоты вращения ICE/крутящего момента MG1/крутящего момента ICE, в случае если крутящий момент ICE ограничен, когда режим переходит из EV --> HEV в соответствии с изменением скорости транспортного средства во время высокого SOC, во втором варианте осуществления.
Подробное описание вариантов осуществления изобретения
[0009] Ниже описывается предпочтительный вариант осуществления для реализации устройства управления движущей силой для гибридного транспортного средства согласно настоящему изобретению на основе первого варианта осуществления и второго варианта осуществления, проиллюстрированных на чертежах.
[0010] Первый вариант осуществления
Сначала описывается конфигурация.
Устройство управления движущей силой первого варианта осуществления применяется к гибридному транспортному средству (одному примеру гибридного транспортного средства), содержащему, в качестве компонентов приводной системы, один двигатель, два мотора/генератора и многоступенчатую зубчатую трансмиссию, имеющую три зацепляющих муфты. Ниже отдельно описываются "общая конфигурация системы", "конфигурация системы управления переключением передач", "конфигурация ступеней переключения передач" и "конфигурация процесса управления движущей силой" относительно конфигурации устройства управления движущей силой для гибридного транспортного средства в первом варианте осуществления.
[0011] Общая конфигурация системы
Фиг. 1 иллюстрирует приводную систему и систему управления гибридного транспортного средства, к которому применяется устройство управления движущей силой первого варианта осуществления. Ниже описывается общая конфигурация системы первого варианта осуществления на основе фиг. 1.
[0012] Приводная система гибридного транспортного средства первого варианта осуществления содержит двигатель ICE внутреннего сгорания, первый мотор/генератор MG1, второй мотор/генератор MG2 и многоступенчатую зубчатую трансмиссию 1, имеющую три зацепляющих муфты C1, C2 и C2, как проиллюстрировано на фиг. 1. "ICE" является аббревиатурой для "двигателя внутреннего сгорания".
[0013] Двигатель ICE внутреннего сгорания выступает в качестве источника приведения в движение гибридного транспортного средства и представляет собой, например, бензиновый двигатель или дизельный двигатель, который располагается в переднем отсеке транспортного средства таким образом, что направление коленчатого вала находится в направлении ширины транспортного средства. Этот двигатель ICE внутреннего сгорания соединяется с картером 10 трансмиссии многоступенчатой зубчатой трансмиссии 1, и выходной вал двигателя внутреннего сгорания соединяется с первым валом 11 многоступенчатой зубчатой трансмиссии 1. При запуске двигателя ICE внутреннего сгорания, второй мотор/генератор MG2 используется в качестве стартерного мотора. Тем не менее, стартерный мотор 2 предоставляется при подготовке к тому, что не может обеспечиваться запуск посредством второго мотора/генератора MG2 с использованием аккумулятора 3 с высоким уровнем мощности, к примеру, во время экстремального холода.
[0014] Первый мотор/генератор MG1 (электромотор) представляет собой синхронный мотор с постоянными магнитами, использующий трехфазный переменный ток, который выступает в качестве источника приведения в движение в гибридном транспортном средстве во время подачи мощности и выступает в качестве генератора во время рекуперации. Помимо этого, второй мотор/генератор MG2 представляет собой синхронный мотор с постоянными магнитами, использующий трехфазный переменный ток, который выступает в качестве мотора, который вращает вал-шестерню многоступенчатой зубчатой трансмиссии 1 и стартерного мотора двигателя ICE внутреннего сгорания во время подачи мощности и выступает в качестве генератора во время приведения в движение посредством двигателя ICE внутреннего сгорания. Как первый мотор/генератор MG1, так и второй мотор/генератор MG2 имеют аккумулятор 3 с высоким уровнем мощности в качестве общего источника мощности в ходе подачи мощности. Дополнительно, электрическая мощность, вырабатываемая посредством первого мотора/генератора MG1 и второго мотора/генератора MG2, заряжается в этот аккумулятор 3 с высоким уровнем мощности.
Статор первого мотора/генератора MG1 крепится к картеру первого мотора/генератора MG1, и картер крепится к картеру 10 трансмиссии для многоступенчатой зубчатой трансмиссии 1. Затем вал первого мотора, интегрированный с ротором первого мотора/генератора MG1, соединяется со вторым валом 12 многоступенчатой зубчатой трансмиссии 1. Статор второго мотора/генератора MG2 крепится к картеру второго мотора/генератора MG2, и картер крепится к картеру 10 трансмиссии для многоступенчатой зубчатой трансмиссии 1. Затем вал второго мотора, интегрированный с ротором второго мотора/генератора MG2, соединяется с шестым валом 16 многоступенчатой зубчатой трансмиссии 1. Первый инвертор 4, который преобразует постоянный ток в трехфазный переменный ток в ходе подачи мощности и преобразует трехфазный переменный ток в постоянный ток в ходе рекуперации, соединяется с обмоткой статора первого мотора/генератора MG1 через первый жгут 5 проводов переменного тока. Второй инвертор 6, который преобразует постоянный ток в трехфазный переменный ток в ходе подачи мощности и преобразует трехфазный переменный ток в постоянный ток в ходе выработки мощности, соединяется с обмоткой статора второго мотора/генератора MG2 через второй жгут 7 проводов переменного тока.
Аккумулятор 3 с высоким уровнем мощности, первый инвертор 4 и второй инвертор 6 соединяются посредством жгута 8 проводов постоянного тока через распределительную коробку 9.
[0015] Гибридное транспортное средство первого варианта осуществления содержит "EV-режим" и "HEV-режим" в качестве режимов движения. EV-режим представляет собой режим движения, в котором только первый мотор/генератор MG1 используется в качестве источника приведения в движение. HEV-режим представляет собой режим движения, в котором первый мотор/генератор MG1 и двигатель ICE внутреннего сгорания используются в качестве источников приведения в движение. Изменение режима между EV-режимом и HEV-режимом является возможным, на основе скорости транспортного средства и требуемой движущей силы водителя (движущей силы), отраженной в величине открытия позиции педали акселератора и операции торможения.
[0016] Многоступенчатая зубчатая трансмиссия 1 содержит несколько зубчатых пар, имеющих различные передаточные числа, и элементы переключения передач, которые переключаются между ступенями переключения передач, и представляет собой трансмиссию с нормальным вводом в зацепление, которая реализует несколько ступеней переключения передач. Эта многоступенчатая зубчатая трансмиссия 1 располагается в тракте передачи мощности из двигателя ICE внутреннего сгорания, первого мотора/генератора MG1 и второго мотора/генератора MG2 на ведущие колеса 19.
Многоступенчатая зубчатая трансмиссия 1 содержит шесть валов-шестерней 11-16, содержащих шестерни и расположенных параллельно друг другу в картере 10 трансмиссии, и три зацепляющих муфты C1, C2, C3 для выбора зубчатой пары. Первый вал 11, второй вал 12, третий вал 13, четвертый вал 14, пятый вал 15 и шестой вал 16 предоставляются в качестве валов-шестерней. Первая зацепляющая муфта C1, вторая зацепляющая муфта C2 и третья зацепляющая муфта C3 предоставляются в качестве зацепляющих муфт. Здесь, первая, вторая и третья зацепляющие муфты C1, C2, C3 представляют собой кулачковые муфты, которые зацепляют/расцепляют состояние зацепления во время переключения передач. Картер 10 трансмиссии содержит электрический масляный насос 20, который подает смазочное масло в участки ввода в зацепление шестерней и участки осевого подшипника внутри картера.
[0017] Первый вал 11 представляет собой вал, который соединяется с выходным валом двигателя внутреннего сгорания для двигателя ICE внутреннего сгорания. Первая шестерня 101, вторая шестерня 102 и третья шестерня 103 располагаются на этом первом валу 11 в порядке от правой стороны, как показано на фиг. 1. Первая шестерня 101 предоставляется как единое целое (что включает в себя закрепление как единого целого) для первого вала 11. Вторая шестерня 102 и третья шестерня 103 представляют собой промежуточные шестерни, в которых участок утолщения, который выступает в осевом направлении, вставляется во внешний периметр первого вала 11, и предоставляются таким образом, что они могут соединяться с возможностью приведения в действие с первым валом 11 через вторую зацепляющую муфту C2.
[0018] Второй вал 12 соединяется с валом первого мотора для первого мотора/генератора MG1 и представляет собой цилиндрический вал, который располагается коаксиально с осью, совмещенной с позицией внешней стороны первого вала 11. Четвертая шестерня 104 и пятая шестерня 105 располагаются на этом втором валу 12 в порядке от правой стороны, как показано на фиг. 1. Четвертая шестерня 104 и пятая шестерня 105 предоставляются как единое целое (что включает в себя закрепление как единого целого) для второго вала 12.
[0019] Третий вал 13 представляет собой вал, расположенный на стороне выходного вала многоступенчатой зубчатой трансмиссии 1, в котором оба конца поддерживаются на картере 10 трансмиссии. Шестая шестерня 106, седьмая шестерня 107, восьмая шестерня 108, девятая шестерня 109 и десятая шестерня 110 располагаются на этом третьем валу 13 в порядке от правой стороны, как показано на фиг. 1. Шестая шестерня 106, седьмая шестерня 107 и восьмая шестерня 108 предоставляются как единое целое (что включает в себя закрепление как единого целого) для третьего вала 13. Девятая шестерня 109 и десятая шестерня 110 представляют собой промежуточные шестерни, в которых участок утолщения, который выступает в осевом направлении, вставляется во внешний периметр третьего вала 13, и предоставляются таким образом, что они могут соединяться с возможностью приведения в действие с третьим валом 13 через третью зацепляющую муфту C3.
Затем шестая шестерня 106 вводится в зацепление со второй шестерней 102, предоставленной на первом валу 11, седьмая шестерня 107 вводится в зацепление с шестнадцатой шестерней 116 дифференциала 17, и восьмая шестерня 108 вводится в зацепление с третьей шестерней 103, предоставленной на первом валу 11. Девятая шестерня 109 вводится в зацепление с четвертой шестерней 104, предоставленной на втором валу 12, и десятая шестерня 110 вводится в зацепление с пятой шестерней 105, предоставленной на втором валу 12.
[0020] Четвертый вал 14 представляет собой вал, в котором оба конца поддерживаются на картере 10 трансмиссии, и одиннадцатая шестерня 111, двенадцатая шестерня 112 и тринадцатая шестерня 113 располагаются на этом четвертом валу 14 в порядке с правой стороны, как показано на фиг. 1. Одиннадцатая шестерня 111 предоставляется как единое целое (что включает в себя закрепление как единого целого) для четвертого вала 14. Двенадцатая шестерня 112 и тринадцатая шестерня 113 представляют собой промежуточные шестерни, в которых участок утолщения, который выступает в осевом направлении, вставляется во внешний периметр четвертого вала 14, и предоставляются таким образом, что они могут соединяться с возможностью приведения в действие с четвертым валом 14 через первую зацепляющую муфту C1.
Затем одиннадцатая шестерня 111 вводится в зацепление с первой шестерней 101, предоставленной на первом валу 11, двенадцатая шестерня 112 вводится в зацепление со второй шестерней 102, предоставленной на первом валу 11, и тринадцатая шестерня 113 вводится в зацепление с четвертой шестерней 104, предоставленной на втором валу 12.
[0021] Пятый вал 15 представляет собой вал, в котором оба конца поддерживаются на картере 10 трансмиссии. Четырнадцатая шестерня 114, которая вводится в зацепление с одиннадцатой шестерней 111, предоставленной на четвертом валу 14, предоставляется как единое целое (что включает в себя закрепление как единого целого) для этого пятого вала 15.
[0022] Шестой вал 16 представляет собой вал, соединенный с валом второго мотора для второго мотора/генератора MG2. Пятнадцатая шестерня 115, которая вводится в зацепление с четырнадцатой шестерней 114, предоставленной на пятом валу 15, предоставляется как единое целое (что включает в себя закрепление как единого целого) для этого шестого вала 16.
[0023] После этого, второй мотор/генератор MG2 и двигатель ICE внутреннего сгорания механически соединяются друг с другом посредством зубчатой передачи, сконфигурированной из пятнадцатой шестерни 115, четырнадцатой шестерни 114, одиннадцатой шестерни 111 и первой шестерни 101, которые вводятся в зубчатое зацепление друг с другом. Эта зубчатая передача служит в качестве редукторной передачи, которая замедляет частоту вращения второго мотора/генератора MG2 (частоту вращения MG2) при запуске двигателя ICE внутреннего сгорания посредством второго мотора/генератора MG2, и служит в качестве повышающей передачи, которая ускоряет частоту вращения двигателя внутреннего сгорания (частоту вращения ICE) при выработке мощности посредством второго мотора/генератора MG2 с приведением в действие двигателя ICE внутреннего сгорания.
[0024] Первая зацепляющая муфта C1 размещается между двенадцатой шестерней 112 и тринадцатой шестерней 113, предоставленными на четвертом валу 14. Эта первая зацепляющая муфта C1 представляет собой кулачковую муфту, которая зацепляется посредством хода зацепления во вращательно синхронизированном состоянии без наличия механизма синхронизации. Когда первая зацепляющая муфта C1 находится в левой позиции зацепления (слева), четвертый вал 14 и тринадцатая шестерня 113 соединяются с возможностью приведения в действие. Помимо этого, в нейтральной позиции (N), эта первая зацепляющая муфта C1 расцепляет как двенадцатую шестерню 112, так и тринадцатую шестерню 113 относительно четвертого вала 14. Кроме того, когда эта первая зацепляющая муфта C1 находится в правой позиции зацепления (справа), четвертый вал 14 и двенадцатая шестерня 112 соединяются с возможностью приведения в действие.
[0025] Вторая зацепляющая муфта C2 размещается между второй шестерней 102 и третьей шестерней 103, предоставленными на первом валу 11. Эта вторая зацепляющая муфта C2 представляет собой кулачковую муфту, которая зацепляется посредством хода зацепления во вращательно синхронизированном состоянии без наличия механизма синхронизации. Когда вторая зацепляющая муфта C2 находится в левой позиции зацепления (слева), первый вал 11 и третья шестерня 103 соединяются с возможностью приведения в действие. Помимо этого, в нейтральной позиции (N), эта вторая зацепляющая муфта C2 расцепляет как вторую шестерню 102, так и третью шестерню 103 относительно первого вала 11. Кроме того, когда эта вторая зацепляющая муфта C2 находится в правой позиции зацепления (справа), первый вал 11 и вторая шестерня 102 соединяются с возможностью приведения в действие.
[0026] Третья зацепляющая муфта C3 размещается между девятой шестерней 109 и десятой шестерней 110, предоставленными на третьем валу 13. Эта третья зацепляющая муфта C3 представляет собой кулачковую муфту, которая зацепляется посредством хода зацепления во вращательно синхронизированном состоянии без наличия механизма синхронизации. Когда третья зацепляющая муфта C3 находится в левой позиции зацепления (слева), третий вал 13 и десятая шестерня 110 соединяются с возможностью приведения в действие. Помимо этого, в нейтральной позиции (N), эта третья зацепляющая муфта C3 расцепляет как девятую шестерню 109, так и десятую шестерню 110 относительно третьего вала 13. Кроме того, когда эта третья зацепляющая муфта C3 находится в правой позиции зацепления (справа), третий вал 13 и девятая шестерня 109 соединяются с возможностью приведения в действие.
[0027] Затем шестнадцатая шестерня 116, которая вводится в зацепление с седьмой шестерней 107, предоставленной как единое целое (что включает в себя закрепление как единого целого) для третьего вала 13 многоступенчатой зубчатой трансмиссии 1, соединяется с левым и правым ведущими колесами 19 через дифференциал 17 и левый и правый ведущие валы 18.
[0028] Система управления транспортного средства первого варианта осуществления содержит гибридный модуль 21 управления, модуль 22 управления мотором, модуль 23 управления трансмиссией и модуль 24 управления двигателем, как проиллюстрировано на фиг. 1.
[0029] Гибридный модуль 21 управления (аббревиатура: "HCM") представляет собой интегральный модуль управления, имеющий функцию для того, чтобы надлежащим образом управлять энергопотреблением всего транспортного средства. Этот гибридный модуль 21 управления соединяется с другими модулями управления (модулем 22 управления мотором, модулем 23 управления трансмиссией, модулем 24 управления двигателем и т.д.) таким образом, чтобы допускать двунаправленный обмен информацией посредством линии 25 CAN-связи. "CAN" в линии 25 CAN-связи является аббревиатурой для "сети блоков управления".
[0030] Помимо этого, этот гибридный модуль 21 управления управляет движущей силой, которая передается на ведущие колеса 19 в соответствии с требуемой движущей силой водителя, в диапазоне максимальной движущей силы, которая может выводиться посредством источника приведения в движение (максимальной выводимой движущей силы). Таким образом, движущая сила, которая выводится из источника приведения в движение (в EV-режиме, только выходной крутящий момент первого мотора/генератора MG1 (крутящий момент MG1), в HEV-режиме, полный крутящий момент из крутящего момента MG1 и выходного крутящего момента из двигателя ICE внутреннего сгорания (крутящего момента ICE)) управляется таким образом, чтобы удовлетворять требуемой движущей силе, которая отражается в величине открытия позиции педали акселератора. Если требуемая движущая сила превышает максимальную выводимую движущую силу источника приведения в движение, движущая сила, которая выводится из источника приведения в движение, задается равной максимальному значению, так что требование по движущей силе может удовлетворяться в максимально возможной степени.
[0031] Кроме того, когда режим движения переходит из EV-режима в HEV-режим в соответствии с изменением скорости транспортного средства, гибридный модуль 21 управления первого варианта осуществления задает максимальное значение движущей силы, передаваемой на ведущие колеса 19 в HEV-режиме, равным значению, которое является эквивалентным максимальной выводимой движущей силе в EV-режиме во время изменения режима. Дополнительно, когда режим движения переходит из EV-режима в HEV-режим в соответствии с изменением требуемой движущей силы водителя, максимальное значение движущей силы, передаваемой на ведущие колеса 19 в HEV-режиме, задается равным максимальной выводимой движущей силе в HEV-режиме.
Таким образом, этот гибридный модуль 21 управления соответствует модулю управления движущей силой и ограничивает движущую силу, передаваемую на ведущие колеса 19 в HEV-режиме во время изменения режима из EV-режима в HEV-режим в соответствии с изменением скорости транспортного средства, и не ограничивает движущую силу, передаваемую на ведущие колеса 19 в HEV-режиме во время изменения режима из EV-режима в HEV-режим в соответствии с изменением требуемой движущей силы.
[0032] Модуль 22 управления мотором (аббревиатура: "MCU") выполняет управление подачей мощности, управление рекуперацией (выработкой мощности) и т.п. первого мотора/генератора MG1 и второго мотора/генератора MG2, посредством команд управления в первый инвертор 4 и второй инвертор 6. Режимы управления для первого мотора/генератора MG1 и второго мотора/генератора MG2 представляют собой "управление крутящим моментом" и "FB-управление по частоте вращения".
При "управлении крутящим моментом", выполняется управление, при котором фактический крутящий момент мотора принудительно следует целевому крутящему моменту мотора, когда определяется целевой крутящий момент мотора, который должен совместно использоваться относительно целевой движущей силы в ходе подачи мощности. При "FB-управлении по частоте вращения", выполняется управление, в котором определяется целевая частота вращения мотора, с которой синхронизируются частоты вращения входного/выходного вала муфты, и крутящий FB-момент выводится для того, чтобы обеспечивать схождение фактической частоты вращения мотора с целевой частотой вращения мотора, когда имеется запрос на переключение передач, чтобы вводить в зацепление и зацеплять любую из зацепляющих муфт C1, C2, C3 в ходе движения.
[0033] Модуль 23 управления трансмиссией (аббревиатура "TMCU") выполняет управление переключением передач для переключения схемы переключения передач многоступенчатой зубчатой трансмиссии 1, посредством вывода команды управления током в первый, второй и третий электрические актуаторы (исполнительные механизмы) 31, 32, 33 (см. фиг. 2), на основе предварительно определенной входной информации. При этом управлении переключением передач первая, вторая и третья зацепляющие муфты C1, C2, C3 избирательно полностью зацепляются/расцепляются, и зубчатая пара, участвующая в передаче мощности, выбирается из нескольких зубчатых пар. Здесь, во время запроса на переключение передач, чтобы зацеплять любую из расцепленных зацепляющих муфт C1, C2, C3, с тем чтобы подавлять частоту дифференциального вращения между входным/выходным валом муфты, чтобы обеспечивать ввод в зацепление и зацепление, FB-управление по частоте вращения (управление синхронизацией вращения) первого мотора/генератора MG1 или второго мотора/генератора MG2 используется в комбинации.
[0034] Модуль 24 управления двигателем (аббревиатура: "ECU") выполняет управление запуском двигателя ICE внутреннего сгорания, управление остановкой двигателя ICE внутреннего сгорания, управление отсечкой топлива и т.п., посредством вывода команды управления в модуль 22 управления мотором, свечу зажигания, актуатор впрыска топлива и т.п., на основе предварительно определенной входной информации.
[0035] Конфигурация системы управления переключением передач
Многоступенчатая зубчатая трансмиссия 1 согласно первому варианту осуществления достигает эффективности посредством уменьшения сопротивления вследствие торможения муфты посредством использования, в качестве элементов переключения передач, первой, второй и третьей зацепляющих муфт C1, C2, C3 (кулачковой муфты), которые вводятся в зацепление и зацепляются. Далее, когда имеется запрос на переключение передач, чтобы вводить в зацепление и зацеплять любую из первой, второй и третьей зацепляющих муфт C1, C2, C3, частоты дифференциального вращения входного/выходного вала муфты синхронизируются посредством первого мотора/генератора MG1 (когда третья зацепляющая муфта C3 зацепляется) или второго мотора/генератора MG2 (когда первая и вторая зацепляющие муфты C1, C2 зацепляются), и ход зацепления начинается, как только частота вращения попадает в диапазон частот вращения для определения синхронизации, чтобы реализовывать переключение передач. Помимо этого, когда имеется запрос на переключение передач, чтобы расцеплять любую из зацепленных первой, второй и третьей зацепляющих муфт C1, C2, C3, передаточный крутящий момент муфты для муфты, которая должна расцепляться, уменьшается, и ход расцепления начинается, как только крутящий момент становится равным или меньше значения определения крутящего момента расцепления, чтобы реализовывать переключение передач. Ниже описывается конфигурация системы управления переключением передач многоступенчатой зубчатой трансмиссии 1 на основе фиг. 2.
[0036] Система управления переключением передач содержит, в качестве зацепляющих муфт, первую зацепляющую муфту C1, вторую зацепляющую муфту C2 и третью зацепляющую муфту C3, как проиллюстрировано на фиг. 2. Первый электрический актуатор 31 для операции переключения передач с помощью C1, C2, второй электрический актуатор 32 для операции выбора C1, C2 и третий электрический актуатор 33 для операции переключения передач с помощью C3 предоставляются в качестве актуаторов. Рабочий механизм 40 выбора C1/C2, рабочий механизм 41 переключения передач с помощью C1, рабочий механизм 42 переключения передач с помощью C2 и рабочий механизм 43 переключения передач с помощью C3 предоставляются в качестве механизмов переключения передач, которые преобразуют операции актуатора в операции зацепления/расцепления муфты. Кроме того, модуль 23 управления трансмиссией предоставляется в качестве средства управления первого электрического актуатора 31, второго электрического актуатора 32 и третьего электрического актуатора 33.
[0037] Первая зацепляющая муфта C1, вторая зацепляющая муфта C2 и третья зацепляющая муфта C3 представляют собой кулачковые муфты, которые переключаются между позицией нейтрали (N: расцепленной позицией), левой позицией зацепления (слева: позицией полного зацепления муфты с левой стороны) и правой позицией зацепления (справа: позицией полного зацепления муфты с правой стороны). Зацепляющие муфты C1, C2, C3 имеют идентичную конфигурацию, содержащую соединительные втулки 51, 52, 53, кольца 54, 55, 56 левой кулачковой муфты и кольца 57, 58, 59 правой кулачковой муфты.
Соединительные втулки 51, 52, 53 предоставляются таким образом, что они имеют возможность хода в осевом направлении посредством шлицевого соединения через ступицу, которая не показана, закрепленную на четвертом валу 14, первом валу 11 и третьем валу 13, и имеют собачки 51a, 51b, 52a, 52b, 53a, 53b с обеих сторон, имеющие плоские верхние поверхности. Кроме того, вилочные канавки 51c, 52c, 53c предоставляются в круговых центральных участках соединительных втулок 51, 52, 53.
Левые кольца 54, 55, 56 кулачковой муфты крепятся к участкам утолщения шестерней 113, 103, 110, которые представляют собой левые промежуточные шестерни зацепляющих муфт C1, C2, C3, и имеют собачки 54a, 55a, 56a с плоскими верхними поверхностями, которые расположены напротив собачек 51a, 52a, 53a.
Правые кольца 57, 58, 59 кулачковой муфты крепятся к участкам утолщения шестерней 112, 102, 109, которые представляют собой правые промежуточные шестерни зацепляющих муфт C1, C2, C3, и имеют собачки 57b, 58b, 59b с плоскими верхними поверхностями, которые расположены напротив собачек 51b, 52b, 53b.
[0038] Рабочий механизм 40 выбора C1/C2 представляет собой механизм для выбора между первой позицией для выбора соединения между первым электрическим актуатором 31 и рабочим механизмом 41 переключения передач с помощью C1 и второй позицией для выбора соединения между первым электрическим актуатором 31 и рабочим механизмом 42 переключения передач с помощью C2.
При выборе первой позиции, стержень 62 переключения передач и стержень 64 переключения передач первой зацепляющей муфты C1 соединяются, и стержень 65 переключения передач второй зацепляющей муфты C2 стопорится в нейтральной позиции. При выборе второй позиции, стержень 62 переключения передач и стержень 65 переключения передач второй зацепляющей муфты C2 соединяются, и стержень 64 переключения передач первой зацепляющей муфты C1 стопорится в нейтральной позиции. Таким образом, механизм является таким, что при выборе позиции из числа первой позиции и второй позиции, в которую переключается одна из зацепляющих муфт, другая зацепляющая муфта стопорится и фиксируется в нейтральной позиции.
[0039] Рабочий механизм 41 переключения передач с помощью C1, рабочий механизм 42 переключения передач с помощью C2 и рабочий механизм 43 переключения передач с помощью C3 представляют собой механизмы для преобразования движений при повороте первого и третьего электрических актуаторов 31, 33 в движения при осевом ходе соединительных втулок 51, 52, 53. Рабочие механизмы 41, 42, 43 переключения передач имеют идентичную конфигурацию, содержащую поворотные тяги 61, 63, стержни 62, 64, 65, 66 переключения передач и вилки 67, 68, 69 переключения передач.
Один из концов поворотных тяг 61, 63 предоставляется на валах актуаторов первого и третьего электрических актуаторов 31, 33, и другие концы соединяются со стержнями 64, 66 переключения передач (или стержнем 65 переключения передач) таким образом, чтобы они могут относительно смещаться. Стержни 64, 65 и 66 переключения передач выполнены с возможностью расширяться и сжиматься согласно абсолютной величине и направлению передающей силы стержня, посредством размещения пружин 64a, 65a, 66a в позициях разделения стержней. Один из концов вилок 67, 68, 69 переключения передач крепится к стержням 64, 65, 66 переключения передач, и другие концы располагаются в вилочных канавках 51c, 52c, 53c соединительных втулок 51, 52, 53.
[0040] Модуль 23 управления трансмиссией вводит сигналы датчиков и сигналы переключения из датчика 71 скорости транспортного средства, датчика 72 величины открытия позиции педали акселератора, датчика 73 частоты вращения выходного передаточного вала, датчика 74 частоты вращения двигателя, датчика 75 частоты вращения MG1, датчика 76 частоты вращения MG2, переключателя 77 режима движения, датчика 78 SOC аккумулятора и т.п. Датчик 73 частоты вращения выходного передаточного вала предоставляется на концевом участке вала для третьего вала 13 и определяет частоту вращения вала третьего вала 13.
Кроме того, модуль 23 управления трансмиссией содержит модуль сервоуправления позицией (например, сервосистему позиционирования посредством PID-управления), который управляет полным зацеплением и расцеплением зацепляющих муфт C1, C2, C3, определенных посредством позиций соединительных втулок 51, 52, 53. Этот модуль сервоуправления позицией вводит сигналы датчиков из датчика 81 позиции первой втулки, датчика 82 позиции второй втулки и датчика 83 позиции третьей втулки. После этого значения датчиков для датчиков 81, 82, 83 позиции втулки считываются, и ток прикладывается к электрическим актуаторам 31, 32, 33 таким образом, что позиции соединительных втулок 51, 52, 53 находятся в расцепленной позиции или позиции зацепления согласно ходу зацепления. Таким образом, посредством задания зацепленного состояния, в котором собачки, приваренные к соединительным втулкам 51, 52, 53, и собачки, приваренные к промежуточным шестерням, находятся в позициях зацепления, полностью зацепленных между собой, промежуточные шестерни соединяются с возможностью приведения в действие с четвертым валом 14, первым валом 11 и третьим валом 13. С другой стороны, посредством задания расцепленного состояния, в котором собачки, приваренные к соединительным втулкам 51, 52, 53, и собачки, приваренные к промежуточным шестерням, находятся в позициях отсутствия зацепления посредством смещения соединительных втулок 51, 52, 53 в осевом направлении, промежуточные шестерни отсоединяются от четвертого вала 14, первого вала 11 и третьего вала 13.
[0041] Конфигурация ступеней переключения передач
Многоступенчатая зубчатая трансмиссия 1 первого варианта осуществления достигает уменьшения размера посредством уменьшения потерь при передаче мощности за счет отказа от элемента передачи мощности (элемента поглощения дифференциального вращения), который допускает передачу мощности при поглощении частоты дифференциального вращения между стороной входного вала и стороной выходного вала фрикционной муфты, жидкостного сцепления и т.п., и посредством уменьшения ступеней переключения передач ICE посредством предоставления усиления мотора для двигателя ICE внутреннего сгорания (ступени EV-переключения передач: 1-2 скорость, ступени ICE-переключения передач: 1-4 скорость). Помимо этого, поскольку многоступенчатая зубчатая трансмиссия 1 не имеет элемента поглощения дифференциального вращения, гибридное транспортное средство первого варианта осуществления не имеет элемента поглощения дифференциального вращения в приводной системе; в силу этого движущая сила, которая выводится из источника приведения в движение, непосредственно передается на ведущие колеса 19.
[0042] Ниже описывается конфигурация ступеней переключения передач многоступенчатой зубчатой трансмиссии 1 на основе фиг. 3 и фиг. 4.
Используется принцип ступеней переключения передач, в котором когда скорость (VSP) транспортного средства находится в начальной области, которая меньше предварительно определенной скорости VSP0 транспортного средства, поскольку многоступенчатая зубчатая трансмиссия 1 не имеет элемента поглощения дифференциального вращения, задается ступень переключения передач, чтобы выбирать "EV-режим", и выполняется запуск мотора посредством только движущей силы мотора, как проиллюстрировано на фиг. 3. После этого, в области движения, в которой скорость транспортного средства равна или выше предварительно определенной скорости VSP0 транспортного средства, задается ступень переключения передач, чтобы выбирать "параллельный HEV-режим", в котором движущая сила двигателя усиливается посредством движущей силы мотора, согласно требованию движущей силы, таким образом, что она реагирует на требование посредством движущей силы мотора и движущей силы двигателя, как проиллюстрировано на фиг. 3. Таким образом, по мере того, как возрастает скорость транспортного средства, ступени ICE-переключения передач переключаются из "(ICE первая) --> ICE вторая --> ICE третья --> ICE четвертая" и ступени EV-переключения передач переключаются из "EV первая --> EV вторая". Следовательно, на основе принципа ступеней переключения передач, проиллюстрированного на фиг. 3, создается карта переключения передач для выдачи запросов на переключение передач для переключения ступени переключения передач.
[0043] С другой стороны, все ступени переключения передач, теоретически достижимые посредством многоступенчатой зубчатой трансмиссии 1, имеющей первую, вторую и третью зацепляющие муфты C1, C2, C3, являются такими, как показано на фиг. 4. На фиг. 4, "блокировка" представляет ступень переключения передач посредством взаимного сцепления, которая не является применимой в качестве ступени переключения передач, "EV-" представляет состояние, в котором первый мотор/генератор MG1 не соединяется с возможностью приведения в действие с ведущими колесами 19 и "ICE-", и "ICEgen" представляют состояние, в котором двигатель ICE внутреннего сгорания не соединяется с возможностью приведения в действие с ведущими колесами 19.
Здесь, когда двигатель ICE внутреннего сгорания не соединяется с возможностью приведения в действие с ведущими колесами 19 (в привязке к "ICE-" и "ICEgen"), "EV-режим" задается. Помимо этого, когда устанавливаются как ступень ICE-переключения передач, так и ступень EV-переключения передач, первый мотор/генератор MG1 и двигатель ICE внутреннего сгорания соединяются с возможностью приведения в действие с ведущими колесами 19, и "HEV-режим" задается. Таким образом, режим движения гибридного транспортного средства задается согласно ступени переключения передач многоступенчатой зубчатой трансмиссии 1. Ниже описывается каждая из ступеней переключения передач.
[0044] Когда вторая зацепляющая муфта C2 находится в "N", и третья зацепляющая муфта C3 находится в "N", следующие ступени переключения передач получаются согласно позиции первой зацепляющей муфты C1. "EV- ICEgen" получается, если первая зацепляющая муфта C1 находится в позиции "слева", "нейтраль" получается, если первая зацепляющая муфта C1 находится в "N", и "EV- ICE третья" получается, если первая зацепляющая муфта C1 находится в позиции "справа". Здесь, ступень переключения передач "EV- ICEgen" представляет собой ступень переключения передач, выбранную во время выработки мощности в режиме холостого хода MG1, при которой мощность вырабатывается в первом моторе/генераторе MG1 посредством двигателя ICE внутреннего сгорания, когда транспортное средство остановлено, или во время двухприводной выработки мощности в режиме холостого хода, при которой выработка мощности MG2 выполняется в дополнение к выработке мощности в режиме холостого хода MG1. Ступень переключения передач "нейтраль" представляет собой ступень переключения передач, выбранную во время выработки мощности в режиме холостого хода MG2, при которой мощность вырабатывается во втором моторе/генераторе MG2 посредством двигателя ICE внутреннего сгорания, когда транспортное средство остановлено. Ступень переключения передач "EV-ICE третья" представляет собой ступень переключения передач, выбранную в "режиме ICE-движения", в котором первый мотор/генератор MG1 остановлен, и ICE-движение на третьей скорости выполняется посредством двигателя ICE внутреннего сгорания.
[0045] Когда вторая зацепляющая муфта C2 находится в "N", и третья зацепляющая муфта C3 находится в позиции "слева", следующие ступени переключения передач получаются согласно позиции первой зацепляющей муфты C1. "EV первая ICE первая" получается, если первая зацепляющая муфта C1 находится в позиции "слева", "EV первая ICE-" получается, если первая зацепляющая муфта C1 находится в "N", и "EV первая ICE третья" получается, если первая зацепляющая муфта C1 находится в позиции "справа".
Здесь, ступень переключения передач "EV первая ICE-" представляет собой ступень переключения передач в "EV-режиме", в котором двигатель ICE внутреннего сгорания остановлен, и движение (рекуперация) выполняется посредством первого мотора/генератора MG1, либо в "последовательном HEV-режиме", в котором EV-движение на первой скорости выполняется посредством первого мотора/генератора MG1 в то время, когда мощность вырабатывается во втором моторе/генераторе MG2 посредством двигателя ICE внутреннего сгорания.
[0046] Когда вторая зацепляющая муфта C2 находится в позиции "слева", и третья зацепляющая муфта C3 находится в позиции "слева", "EV первая ICE вторая" получается, если позиция первой зацепляющей муфты C1 находится в "N".
[0047] Когда вторая зацепляющая муфта C2 находится в позиции "слева", и третья зацепляющая муфта C3 находится в "N", следующие ступени переключения передач получаются согласно позиции первой зацепляющей муфты C1. "EV1,5 ICE вторая" получается, если первая зацепляющая муфта C1 находится в позиции "слева", и "EV- ICE вторая" получается, если первая зацепляющая муфта C1 находится в "N".
Здесь, ступень переключения передач "EV- ICE вторая" представляет собой ступень переключения передач, выбранную в "режиме ICE-движения", в котором первый мотор/генератор MG1 остановлен, и ICE-движение на второй скорости выполняется посредством двигателя ICE внутреннего сгорания.
[0048] Когда вторая зацепляющая муфта C2 находится в позиции "слева", и третья зацепляющая муфта C3 находится в позиции "справа", "EV2 вторая ICE вторая" получается, если позиция первой зацепляющей муфты C1 находится в "N".
[0049] Когда вторая зацепляющая муфта C2 находится в "N", и третья зацепляющая муфта C3 находится в позиции "справа", следующие ступени переключения передач получаются согласно позиции первой зацепляющей муфты C1. "EV вторая ICE третья' " получается, если первая зацепляющая муфта C1 находится в позиции "слева", "EV вторая ICE-" получается, если первая зацепляющая муфта C1 находится в "N", и "EV вторая ICE третья" получается, если первая зацепляющая муфта C1 находится в позиции "справа".
Здесь, ступень переключения передач "EV вторая ICE-" представляет собой ступень переключения передач, выбираемую в "EV-режиме", в котором двигатель ICE внутреннего сгорания остановлен, и движение (рекуперация) выполняется посредством первого мотора/генератора MG1, или в "последовательном HEV-режиме", в котором EV-движение на второй скорости выполняется посредством первого мотора/генератора MG1 в то время, когда мощность вырабатывается во втором моторе/генераторе MG2 посредством двигателя ICE внутреннего сгорания.
[0050] Когда вторая зацепляющая муфта C2 находится в позиции "справа", и третья зацепляющая муфта C3 находится в позиции "справа", "EV2 вторая ICE четвертая" получается, если позиция первой зацепляющей муфты C1 находится в "N".
[0051] Когда вторая зацепляющая муфта C2 находится в позиции "справа", и третья зацепляющая муфта C3 находится в "N", следующие ступени переключения передач получаются согласно позиции первой зацепляющей муфты C1. "EV2,5 ICE четвертая" получается, если первая зацепляющая муфта C1 находится в позиции "слева", и "EV- ICE четвертая" получается, если первая зацепляющая муфта C1 находится в "N".
Здесь, ступень переключения передач "EV- ICE четвертая" представляет собой ступень переключения передач, выбранную в "режиме ICE-движения", в котором первый мотор/генератор MG1 остановлен, и ICE-движение на четвертой скорости выполняется посредством двигателя ICE внутреннего сгорания.
[0052] Когда вторая зацепляющая муфта C2 находится в позиции "справа", и третья зацепляющая муфта C3 находится в позиции "слева", "EV первая ICE четвертая" получается, если позиция первой зацепляющей муфты C1 находится в "N".
[0053] Далее описывается способ отделять "ступень переключения передач при нормальном использовании" от всех вышеописанных ступеней переключения передач, достигаемых посредством комбинаций зацепления зацепляющих муфт C1, C2, C3.
[0054] Во-первых, ступени переключения передач за исключением "ступеней переключения передач посредством сцепления (перекрестная штриховка на фиг. 4)" и "ступеней переключения передач, которые не могут выбираться посредством механизма переключения передач (штриховка вправо-вверх на фиг. 4)" из всех ступеней переключения передач, должны представлять собой несколько ступеней переключения передач, которые могут достигаться посредством многоступенчатой зубчатой трансмиссии 1. Здесь, ступени переключения передач, которые не могут выбираться посредством механизма переключения передач, означают "EV 1,5 ICE вторая", в котором первая зацепляющая муфта C1 находится в позиции "слева", и вторая зацепляющая муфта C2 находится в позиции "слева", и "EV 2,5 ICE четвертая", в котором первая зацепляющая муфта C1 находится в позиции "слева", и вторая зацепляющая муфта C2 находится в позиции "справа". Причина, по которой они не могут выбираться посредством механизма переключения передач, состоит в том, что один первый электрический актуатор 31 представляет собой актуатор переключения передач, который совместно используется для использования с двумя зацепляющими муфтами C1, C2, и в том, что одна из зацепляющих муфт стопорится в нейтральной позиции посредством рабочего механизма 40 выбора C1/C2.
[0055] Затем ступени переключения передач за исключением "ступеней переключения передач, не используемых в нормальном режиме (штриховка "вправо вниз" на фиг. 4)" и "ступеней переключения передач, используемых с низким SOC и т.д. (рамка с пунктирной линией на фиг. 1)" из нескольких ступеней переключения передач, которые могут достигаться посредством многоступенчатой зубчатой трансмиссии 1, должны представлять собой "ступень переключения передач при нормальном использовании (рамка с жирной линией на фиг. 4)". Здесь, "ступени переключения передач, не используемые в нормальном режиме" представляют собой "EV вторая ICE третья'" и "EV первая ICE четвертая", и "ступени переключения передач, используемые с низким SOC и т.д." представляют собой "EV- ICEgen" и "EV первая ICE первая".
[0056] Следовательно, "ступени переключения передач при нормальном использовании" сконфигурированы посредством добавления "нейтрали" к ступеням EV-переключения передач для перевода в EV-режим ("EV первая ICE-", "EV вторая ICE-"), ступеням ICE-переключения передач ("EV- ICE вторая", "EV- ICE третья", "EV- ICE четвертая") и комбинированным ступеням переключения передач для перевода в HEV-режим ("EV первая ICE вторая", "EV первая ICE третья", "EV вторая ICE вторая", "EV вторая ICE третья", "EV вторая ICE четвертая").
[0057] Конфигурация процесса управления движущей силой
Фиг. 5A и фиг. 5B являются блок-схемами последовательности операций способа, иллюстрирующими последовательность операций процесса управления движущей силой, который выполняется в первом варианте осуществления. Ниже описывается каждый из этапов на фиг. 5A и фиг. 5B, которые показывают один пример процесса управления движущей силой.
[0058] На этапе S1, определяется то, равна или выше либо нет оставшаяся величина заряда аккумулятора 3 с высоким уровнем мощности (SOC аккумулятора) порогового значения SOC, которое задается заранее. В случае "Да" ("SOC аккумулятора ≥ пороговое значение SOC"), процесс переходит к этапу S2, а если "Нет" ("SOC аккумулятора < пороговое значение SOC"), процесс переходит к этапу S10.
Здесь, SOC аккумулятора определяется посредством датчика 78 SOC аккумулятора. Помимо этого, "пороговое значение SOC" является пороговым значением для определения того, следует или нет приоритезировать операцию заряда аккумулятора 3 с высоким уровнем мощности по сравнению с движущей силой, и произвольно задается.
[0059] На этапе S2, после определения того, что "SOC аккумулятора ≥ пороговое значение SOC", на этапе S1, определяется то, что SOC аккумулятора обеспечивается в достаточной степени, карта переключения передач, которая должна использоваться в модуле 22 управления мотором, задается как "карта переключения передач во время высокого SOC", проиллюстрированная на фиг. 6, и процесс переходит к этапу S3.
Здесь, "карта переключения передач" представляет собой карту, на которой скорость (VSP) транспортного средства и требуемая тормозная/движущая сила (движущая сила) являются осями координат, на координатной плоскости которой назначаются области выбора для нескольких ступеней переключения передач, которые составляют группу ступеней переключения передач при нормальном использовании. Модуль 22 управления мотором определяет ступень переключения передач многоступенчатой зубчатой трансмиссии 1, на основе позиции рабочей точки на этой карте переключения передач.
Затем на "карте переключения передач во время высокого SOC", область выбора "EV первая ICE-" назначается области низких скоростей транспортного средства после трогания с места, и области выбора "EV первая ICE вторая" "EV вторая ICE-", "EV первая ICE третья", "EV вторая ICE вторая", "EV вторая ICE третья" и "ICE четвертая EV вторая" назначаются области от промежуточных до высоких скоростей транспортного средства, в качестве области приведения в движение для обеспечения движения согласно нажатию педали акселератора. Помимо этого, в качестве областей рекуперативного торможения с ногой, снятой с акселератора, или при нажатии тормоза, область выбора "EV первая ICE-" назначается области низких скоростей транспортного средства, и область выбора "EV вторая ICE-" назначается области от промежуточных до высоких скоростей транспортного средства. Сегмент линии, который разделяет каждую из областей выбора в области приведения в движение для обеспечения движения, указывает максимальную движущую силу, которая может выводиться посредством источника приведения в движение (максимальную выводимую движущую силу) в каждой из областей выбора. Дополнительно, сегмент линии, который разделяет каждую из областей выбора в области рекуперативного торможения, указывает максимальную движущую силу, которая может выводиться посредством источника приведения в движение (максимальную выводимую движущую силу) в каждой из областей выбора.
[0060] На этапе S3, после задания "карты переключения передач во время высокого SOC" на этапе S2, величина открытия позиции педали акселератора считывается, и процесс переходит к этапу S4.
Здесь, величина открытия позиции педали акселератора является параметром, представляющим требуемую движущую силу водителя, и определяется посредством датчика 72 величины открытия позиции педали акселератора.
[0061] На этапе S4, после считывания величины открытия позиции педали акселератора на этапе S3, скорость транспортного средства считывается, и процесс переходит к этапу S5.
Здесь, скорость транспортного средства определяется посредством датчика 71 скорости транспортного средства.
[0062] На этапе S5, после считывания скорости транспортного средства на этапе S4, определяется то, выведен или нет запрос на изменение режима для того, чтобы переключаться из EV-режима на HEV-режим. В случае "Да" (запрос на изменение режима присутствует), процесс переходит к этапу S6, а если "Нет" (запрос на изменение режима отсутствует), процесс возвращается к этапу S3.
Здесь, запрос на изменение режима для того, чтобы переключаться из EV-режима на HEV-режим, выводится, когда рабочая точка, которая определяется из величины открытия позиции педали акселератора, считанной на этапе S3, и скорости транспортного средства, считанной на этапе S4, перемещена из области выбора "EV первая ICE-" в область выбора "EV первая ICE вторая" или в область выбора "EV первая ICE третья" на "карте переключения передач во время высокого SOC", заданной на этапе S2.
[0063] На этапе S6, после определения того, что запрос на изменение режима присутствует, на этапе S5, определяется то, основано или нет изменение режима, определенное для запроса на этапе S5, на запросе на изменение режима в соответствии с изменением (увеличением) скорости транспортного средства. В случае "Да" (изменение скорости транспортного средства: автоматическое повышение), процесс переходит к этапу S7, а если "Нет" (изменение требуемой движущей силы: понижение при нажатии), процесс переходит к этапу S9.
Здесь, "запрос на изменение режима в соответствии с изменением (увеличением) скорости транспортного средства" означает, что рабочая точка перемещается из области выбора "EV первая ICE-" в область выбора "EV первая ICE вторая" или в область выбора "EV первая ICE третья" с увеличением скорости транспортного средства, даже если требуемая движущая сила водителя находится в постоянном состоянии (включающем в себя флуктуацию в пределах предварительно определенного диапазона). В это время, водитель поддерживает величину открытия позиции педали акселератора практически постоянной, и чувствительность к толчку становится высокой.
[0064] На этапе S7, после определения запроса на изменение режима в соответствии с изменением скорости транспортного средства на этапе S6, максимальное значение движущей силы в HEV-режиме ("EV первая ICE вторая") задается равным значению, которое является эквивалентным максимальной выводимой движущей силе (максимальной движущей силе) в EV-режиме ("EV первая ICE-") во время изменения режима.
Здесь, "движущая сила в HEV-режиме" представляет собой движущую силу, которая передается из источников приведения в движение (первого мотора/генератора MG1 и двигателя ICE внутреннего сгорания) на ведущие колеса 19 в HEV-режиме. Таким образом, движущая сила представляет собой полный крутящий момент, полученный посредством суммирования выходного крутящего момента двигателя ICE внутреннего сгорания (крутящего момента ICE) с выходным крутящим моментом первого мотора/генератора MG1 (крутящим моментом MG1). С другой стороны, "максимальная выводимая движущая сила в EV-режиме" представляет собой движущую силу, которая формируется посредством максимального крутящего момента, который может задаваться в источнике приведения в движение (первом моторе/генераторе MG1) в EV-режиме. "Максимальная выводимая движущая сила в EV-режиме во время изменения режима" представляет собой максимальную движущую силу на граничной линии между EV-режимом и HEV-режимом, которая указывается посредством X1 на фиг. 6.
Таким образом, "максимальное значение движущей силы в HEV-режиме задается равным значению, которое является эквивалентным максимальной выводимой движущей силе в EV-режиме во время изменения режима" означает ограничение движущей силы в HEV-режиме в соответствии с максимальной выводимой движущей силой в EV-режиме во время изменения режима. Как результат, даже если крутящий момент ICE суммируется с крутящим моментом MG1 вследствие изменения режима на HEV-режим, верхний предел движущей силы, которая передается на ведущие колеса 19, ограничен.
[0065] На этапе S8, после задания движущей силы в HEV-режиме на этапе S7, определяется то, становится или нет максимальная выводимая движущая сила (максимальная движущая сила) в HEV-режиме равной или меньше максимальной выводимой движущей силы (максимальной движущей силы) в EV-режиме во время изменения режима. В случае "Да" ("максимальная движущая сила в HEV-режиме ≤ максимальная движущая сила в EV-режиме"), процесс переходит к этапу S9, а если "Нет" ("максимальная движущая сила в HEV-режиме > максимальная движущая сила в EV-режиме"), процесс возвращается к этапу S7.
Здесь, "максимальная выводимая движущая сила в HEV-режиме" представляет собой движущую силу, которая формируется посредством максимального крутящего момента, который может задаваться в источниках приведения в движение (первом моторе/генераторе MG1 и двигателе ICE внутреннего сгорания) в HEV-режиме. Эта "максимальная выводимая движущая сила в HEV-режиме" является значением, которое отличается согласно скорости транспортного средства, так что максимальная выводимая движущая сила может становиться различным значением в зависимости от скорости транспортного средства, даже в идентичном "HEV-режиме".
[0066] На этапе S9, после определения запроса на изменение режима в соответствии с изменением (увеличением) требуемой движущей силы на этапе S6, или определения того, что "максимальная движущая сила в HEV-режиме ≤ максимальная движущая сила в EV-режиме", на этапе S8, максимальное значение движущей силы в HEV-режиме задается равным максимальной выводимой движущей силе (максимальной движущей силе) в HEV-режиме, и процесс переходит к концу.
Здесь, "запрос на изменение режима в соответствии с изменением (увеличением) требуемой движущей силы" означает, что рабочая точка перемещается из области выбора "EV первая ICE-" в область выбора "EV первая ICE вторая" или в область выбора "EV первая ICE третья" с увеличением требуемой движущей силы водителя, даже если скорость транспортного средства находится в постоянном состоянии (включающем в себя флуктуацию в пределах предварительно определенного диапазона). В это время, водитель нажимает педаль акселератора, так что чувствительность к толчку становится относительно низкой (допустимый толчок при изменении режима увеличивается). Когда максимальная движущая сила в HEV-режиме становится ≤ максимальной движущей силой в EV-режиме, даже если выводится максимальный крутящий момент, который может задаваться посредством источника приведения в движение, значение должно опускаться ниже уровня, эквивалентного максимальной выводимой движущей силе в EV-режиме во время изменения режима.
Таким образом, на этом этапе S9, определяется то, что требуемая движущая сила водителя является высокой, и то, что чувствительность к толчку является низкой, или то, что движущая сила, передаваемая на ведущие колеса 19, резко не увеличивается, даже если выводится максимальный крутящий момент, который может задаваться посредством источника приведения в движение, и движущая сила в HEV-режиме не ограничена относительно максимальной выводимой движущей силы.
[0067] На этапе S10, после определения того, что "SOC < пороговое значение SOC", на этапе S1, определяется то, что SOC аккумулятора не обеспечивается, и то, что заряд должен быть приоритезирован, карта переключения передач, которая должна использоваться в модуле 22 управления мотором, задается как "карта переключения передач во время низкого SOC", проиллюстрированная на фиг. 7, и процесс переходит к этапу S11.
Здесь, по сравнению с "картой переключения передач во время высокого SOC" (фиг. 6), "карта переключения передач во время низкого SOC" представляет собой карту, на которой "последовательный, EV первая (последовательный EV-режим в "EV первая ICE-")" и "EV первая ICE первая" добавляются в область приведения в движение для обеспечения движения координатной плоскости, в то время как "EV вторая ICE-" опускается, с тем чтобы подавлять потребление мощности.
Таким образом, на "карте переключения передач во время низкого SOC", область выбора "последовательный, EV первая" назначается области низких скоростей транспортного средства после трогания с места, в качестве области приведения в движение для обеспечения движения посредством нажатия педали акселератора. Затем области выбора "EV первая ICE первая", "EV первая ICE вторая" и "EV первая ICE третья" назначаются области промежуточных скоростей транспортного средства, и области выбора "EV вторая ICE вторая", "EV вторая ICE третья" и "EV вторая ICE четвертая" назначаются области высоких скоростей транспортного средства. Помимо этого, в качестве областей рекуперативного торможения с ногой, снятой с акселератора, или при нажатии тормоза, область выбора "EV первая ICE- (EV вторая ICE-)" назначается области низких скоростей транспортного средства, и область выбора "EV вторая ICE-" назначается области высоких скоростей транспортного средства. Сегмент линии, который разделяет каждую из областей выбора в области приведения в движение для обеспечения движения, указывает максимальную движущую силу, которая может выводиться посредством источника приведения в движение (максимальную выводимую движущую силу) в каждой из областей выбора. Дополнительно, сегмент линии, который разделяет каждую из областей выбора в области рекуперативного торможения, указывает максимальную движущую силу, которая может выводиться посредством источника приведения в движение (максимальную выводимую движущую силу) в каждой из областей выбора.
[0068] На этапе S11, после задания "карты переключения передач во время низкого SOC" на этапе S10, величина открытия позиции педали акселератора считывается, и процесс переходит к этапу S12.
[0069] На этапе S12, после считывания величины открытия позиции педали акселератора на этапе S11, скорость транспортного средства считывается, и процесс переходит к этапу S13.
[0070] На этапе S13, после считывания скорости транспортного средства на этапе S12, определяется то, выведен или нет запрос на изменение режима для того, чтобы переключаться из EV-режима на HEV-режим. В случае "Да" (запрос на изменение режима присутствует), процесс переходит к этапу S14, а если "Нет" (запрос на изменение режима отсутствует), процесс возвращается к этапу S11.
Здесь, запрос на изменение режима для того, чтобы переключаться из EV-режима на HEV-режим, выводится, когда рабочая точка, которая определяется из величины открытия позиции педали акселератора, считанной на этапе S11, и скорости транспортного средства, считанной на этапе S12, перемещена из области выбора "последовательный, EV первая" в область выбора "EV первая ICE первая" на "карте переключения передач во время низкого SOC", заданной на этапе S10.
[0071] На этапе S14, после определения того, что запрос на изменение режима присутствует на этапе S13, определяется то, основано или нет изменение режима, определенное для запроса на этапе S13, на запросе на изменение режима в соответствии с изменением (увеличением) скорости транспортного средства. В случае "Да" (изменение скорости транспортного средства: автоматическое повышение), процесс переходит к этапу S15, а если "Нет" (изменение требуемой движущей силы: понижение при нажатии), процесс переходит к этапу S19.
Здесь, "запрос на изменение режима в соответствии с изменением (увеличением) скорости транспортного средства" означает, что рабочая точка перемещается из области выбора "последовательный, EV первая" в область выбора "EV первая ICE первая" с увеличением скорости транспортного средства, даже если требуемая движущая сила водителя находится в постоянном состоянии (включающем в себя флуктуацию в пределах предварительно определенного диапазона).
[0072] На этапе S15, после определения запроса на изменение режима в соответствии с изменением скорости транспортного средства на этапе S14, SOC аккумулятора считывается, и процесс переходит к этапу S16.
Здесь, SOC аккумулятора определяется посредством датчика 78 SOC аккумулятора.
[0073] На этапе S16, после считывания SOC аккумулятора на этапе S15, градиент θ увеличения движущей силы в HEV-режиме задается на основе считанного SOC аккумулятора, и процесс переходит к этапу S17.
Здесь, "градиент θ увеличения движущей силы в HEV-режиме" представляет собой градиент, когда движущая сила в HEV-режиме увеличивается в соответствии с увеличением скорости транспортного средства, с максимальной выводимой движущей силой "Tα" (максимальной движущей силой) в момент времени изменения режима из EV-режима в HEV-режим (в момент времени скорости V0 транспортного средства) в качестве опорного значения, как проиллюстрировано на фиг. 8A.
Таким образом, случай, в котором максимальное значение движущей силы в на HEV-режиме переходит на сегменте линии, который становится "Tα" по мере того, как возрастает скорость транспортного средства, рассматривается как градиент увеличения θ=нуль. Этот градиент θ увеличения задается на основе SOC аккумулятора и карты, проиллюстрированной на фиг. 8B, и градиент θ увеличения становится более высоким значением по мере того, как снижается SOC аккумулятора. Когда градиент θ увеличения="максимальный" задается, максимальное значение движущей силы в HEV-режиме задается равным максимальной выводимой движущей силе (максимальной движущей силе) в HEV-режиме.
[0074] На этапе S17, после задания градиента θ увеличения на этапе S16, максимальное значение движущей силы в HEV-режиме ("EV первая ICE первая") задается равным значению, которое изменяется (увеличивается) с максимальной выводимой движущей силы (максимальной движущей силы) в EV-режиме ("последовательный, EV первая") во время изменения режима с градиентом θ увеличения, заданным на этапе S16, в соответствии с увеличением скорости транспортного средства, и процесс переходит к этапу S18.
Здесь, "максимальная выводимая движущая сила в EV-режиме во время изменения режима" представляет собой максимальную движущую силу на граничной линии между EV-режимом и HEV-режимом, которая указывается посредством X2 на фиг. 7.
Таким образом, "максимальное значение движущей силы в HEV-режиме задается равным значению, которое увеличивается с максимальной выводимой движущей силы в EV-режиме во время изменения режима с градиентом θ увеличения" означает ограничение движущей силы в HEV-режиме в соответствии с максимальной выводимой движущей силой в EV-режиме во время изменения режима и варьирование величины ограничения на основе SOC аккумулятора. Как результат, верхний предел движущей силы, которая передается на ведущие колеса 19 в HEV-режиме, увеличивается по мере того, как снижается SOC аккумулятора.
[0075] На этапе S18, после задания движущей силы в HEV-режиме на этапе S17, определяется то, становится или нет максимальная выводимая движущая сила (максимальная движущая сила) в HEV-режиме равной или меньше значения, которое изменяется с градиентом θ увеличения в соответствии с увеличением скорости транспортного средства, из максимальной выводимой движущей силы в EV-режиме во время изменения режима. В случае "Да" ("максимальная движущая сила в HEV-режиме ≤ значение, которое изменяется с градиентом θ увеличения"), процесс переходит к этапу S19, а если "Нет" ("максимальная движущая сила в HEV-режиме > значение, которое изменяется с градиентом θ увеличения"), процесс возвращается к этапу S17.
[0076] На этапе S19, после определения запроса на изменение режима в соответствии с изменением (увеличением) требуемой движущей силы на этапе S14, или определения того, что "максимальная движущая сила в HEV-режиме ≤ значение, которое изменяет с градиентом θ увеличения", на этапе S18, максимальное значение движущей силы в HEV-режиме, задается равной максимальной выводимой движущей силе (максимальной движущей силе) в HEV-режиме, и процесс переходит к концу.
[0077] Далее описываются операции.
Во-первых, описываются "проблемы гибридного транспортного средства, которое не имеет элемента поглощения дифференциального вращения в приводной системе"; после этого отдельно описываются "операция ограничения движущей силы во время высокого SOC", "операция неограничения движущей силы во время высокого SOC" и "операция ограничения движущей силы во время низкого SOC" относительно операций устройства управления движущей силой для гибридного транспортного средства первого варианта осуществления.
[0078] Проблемы гибридного транспортного средства, которое не имеет элемента поглощения дифференциального вращения в приводной системе
Элемент поглощения дифференциального вращения представляет собой элемент передачи мощности, который допускает передачу крутящего момента, даже если дифференциальное вращение формируется между вращательным элементом на стороне входного вала и вращательным элементом на стороне выходного вала, таким как фрикционная муфта или преобразователь крутящего момента. В этом элементе поглощения дифференциального вращения, можно поглощать флуктуации в движущей силе, которая передается во вращательный элемент на стороне входного вала, посредством постепенного увеличения крутящего момента зацепления в состоянии, в котором вращательный элемент на стороне выходного вала проскальзывает относительно вращательного элемента на стороне входного вала.
[0079] Таким образом, в случае гибридного транспортного средства, содержащего электромотор и двигатель внутреннего сгорания, служащие в качестве источников приведения в движение, и имеющего элемент поглощения дифференциального вращения в приводной системе из источников приведения в движение на ведущие колеса, можно поглощать флуктуации в движущей силе с помощью элемента поглощения дифференциального вращения, даже если выходной крутящий момент двигателя внутреннего сгорания (крутящий момент двигателя) суммируется с выходным крутящим моментом электромотора (крутящим моментом мотора) вследствие изменения режима из EV-режима в HEV-режим, и движущая сила, которая выводится из источников приведения в движение, внезапно увеличивается. Как результат, флуктуации в движущей силе, которая передается на ведущие колеса, подавляются, и толчок при изменении режима может подавляться.
[0080] Напротив, в транспортном средстве, которое не имеет элемента поглощения дифференциального вращения в приводной системе, движущая сила, которая выводится из источника приведения в движение, передается на ведущие колеса как есть. Таким образом, в гибридном транспортном средстве, которое не имеет элемента поглощения дифференциального вращения в приводной системе, если крутящий момент двигателя суммируется с крутящим моментом мотора во время изменения режима из EV-режима в HEV-режим, и движущая сила, которая выводится из источника приведения в движение, внезапно увеличивается, флуктуации в движущей силе передаются на ведущие колеса. Следовательно, возникает такая проблема, что движущая сила, которая передается на ведущие колеса, колеблется и формирует толчок при изменении режима.
[0081] С другой стороны, известно, что чувствительность водителя к толчку (то, насколько легко ощущается толчок) относительно толчка при изменении режима отличается в зависимости от ситуации при движении.
Таким образом, во время изменения режима из EV-режима в HEV-режим согласно увеличению требуемой движущей силы водителя, водитель хочет увеличения движущей силы. Соответственно, чувствительность к толчку становится относительно низкой, и допустимый (без ощущения дискомфорта) толчок при изменении режима увеличивается.
Тем не менее, когда существует изменение режима из EV-режима в HEV-режим в соответствии с увеличением скорости транспортного средства в состоянии, в котором требуемая движущая сила водителя является практически постоянной, водитель не хочет увеличения движущей силы. Следовательно, чувствительность к толчку становится относительно высокой, и даже легкий толчок (флуктуация движущей силы) имеет тенденцию вызывать дискомфорт.
[0082] Соответственно, в гибридном транспортном средстве, которое не имеет элемента поглощения дифференциального вращения в приводной системе, и в котором изменения движущей силы непосредственно передаются на ведущие колеса, если чувствительность водителя к толчку является высокой, необходимо подавлять толчок при изменении режима.
[0083] Операция ограничения движущей силы во время высокого SOC
Фиг. 9 является временной диаграммой, иллюстрирующей каждую из характеристик из скорости транспортного средства/G транспортного средства/величины открытия позиции педали акселератора/частоты вращения MG1/частоты вращения ICE, когда режим переходит из "EV --> HEV" в соответствии с изменением скорости транспортного средства во время высокого SOC, в первом варианте осуществления. Ниже описывается операция ограничения движущей силы во время высокого SOC, на основе блок-схем последовательности операций способа, проиллюстрированных на фиг. 5A и 5B, и временной диаграммы, проиллюстрированной на фиг. 9.
"G транспортного средства" представляет собой ускорение, которое действует на кузов транспортного средства, и является значением, указывающим движущую силу, которая передается из источника приведения в движение на ведущие колеса 19. "Частота вращения MG1" представляет собой частоту вращения выходного вала первого мотора/генератора MG1. "Частота вращения ICE" представляет собой частоту вращения выходного вала двигателя ICE внутреннего сгорания. "Крутящий момент MG1" представляет собой выходной крутящий момент первого мотора/генератора MG1. "Крутящий момент ICE" представляет собой выходной крутящий момент двигателя ICE внутреннего сгорания. В "G транспортного средства", положительная сторона указывает ускорение (движущую силу), а отрицательная сторона указывает замедление (тормозную силу). В "крутящем моменте MG1", положительная сторона указывает крутящий момент приведения в движение, а отрицательная сторона указывает рекуперативный крутящий момент. В "крутящем моменте ICE", положительная сторона указывает крутящий момент приведения в движение, а отрицательная сторона указывает крутящий момент при выработке мощности (крутящий момент для выработки мощности во втором моторе/генераторе MG2).
[0084] В гибридном транспортном средстве первого варианта осуществления, рассматривается остановленное состояние, в котором как первый мотор/генератор MG1, так и двигатель ICE внутреннего сгорания остановлены, в состоянии, в котором SOC аккумулятора является относительно высоким (равным или большим порогового значения SOC). В это время, процесс переходит от "этап S1 --> этап S2" на блок-схеме последовательности операций способа, показанной на фиг. 5A, и "карта переключения передач во время высокого SOC", проиллюстрированная на фиг. 6, задается в качестве карты переключения передач. Затем процесс переходит от "этап S3 --> этап S4 --> этап S5". Перед временем t1, как показано на фиг. 9, величина открытия позиции педали акселератора и скорость транспортного средства равны нулю. Соответственно, рабочая точка существует в позиции P на карте переключения передач, как проиллюстрировано на фиг. 10, так что может выбираться ступень переключения передач "EV первая ICE-", на которой, в многоступенчатой зубчатой трансмиссии 1, все из первой, второй и третьей зацепляющих муфт C1, C2, C3 задаются в "нейтраль", либо первая и вторая зацепляющие муфты C1, C2 задаются в "нейтраль", в то время как третья зацепляющая муфта C3 задается в позиции "слева". Помимо этого, поскольку рабочая точка не перемещается, запрос на изменение режима из EV-режима в HEV-режим не выводится, и последовательность операций "этап S3 --> этап S4 --> этап S5" повторяется.
[0085] Педаль акселератора нажимается, и величина открытия позиции педали акселератора увеличивается во время t1. В это время, требуемая движущая сила водителя, отражаемая в величине открытия позиции педали акселератора, должна быть абсолютной величиной, указываемой посредством пунктирной линии на фиг. 10.
[0086] После этого, когда нажимается педаль акселератора, и формируется требуемая движущая сила водителя, рабочая точка на карте переключения передач перемещается из позиции P в позицию P1. Как результат, ступень переключения передач многоступенчатой зубчатой трансмиссии 1 задается в "EV первая ICE-", и третья зацепляющая муфта C3 задается в позиции "слева", в то время как первый мотор/генератор MG1 приводится в действие. Как результат, формируется крутящий момент MG1, и частота вращения MG1 увеличивается со времени t2. Соответственно, ускорение действует на кузов транспортного средства, чтобы формировать G транспортного средства, и скорость транспортного средства начинает повышаться. Здесь, абсолютная величина G транспортного средства является пропорциональной крутящему моменту MG1. С другой стороны, значение скорости транспортного средства является пропорциональным частоте вращения MG1. Помимо этого, тракт передачи мощности приведения в движение в это время соединяется из "первый мотор-генератор MG1 --> второй вал 12 --> третья зацепляющая муфта C3 --> третий вал 13 --> ведущий вал 18 --> ведущие колеса 19", как проиллюстрировано на фиг. 11.
Таким образом, только крутящий момент MG1 из первого мотора-генератора MG1 должен передаваться на ведущие колеса 19.
[0087] После этого, когда скорость транспортного средства увеличивается, рабочая точка на карте переключения передач, проиллюстрированной на фиг. 10, также перемещается, в соответствии с этим увеличением скорости транспортного средства. В это время, величина открытия позиции педали акселератора поддерживается равной постоянному значению, и требуемая движущая сила водителя также поддерживает значение, указываемое посредством пунктирной линии. Соответственно, поскольку максимальная выводимая движущая сила ниже требуемой движущей силы, рабочая точка перемещается из позиции P1 в правую сторону на сегменте линии, указывающем максимальную выводимую движущую силу, в соответствии с увеличением скорости транспортного средства, как проиллюстрировано посредством стрелки на фиг. 10.
[0088] Когда скорость транспортного средства превышает V0 во время t3, рабочая точка на карте переключения передач, проиллюстрированной на фиг. 10, перемещается из области выбора "EV первая ICE-" в область выбора "EV первая ICE вторая". Как результат, запрос на изменение режима из EV-режима в HEV-режим выводится. Таким образом, ступень переключения передач многоступенчатой зубчатой трансмиссии 1 задается в "EV первая ICE вторая", и вторая зацепляющая муфта C2 задается в позиции "слева", в то время как двигатель ICE внутреннего сгорания запускается посредством второго мотора/генератора MG2. Помимо этого, тракт передачи мощности приведения в движение в это время становится трактом, который соединяется из "первый мотор-генератор MG1 --> второй вал 12 --> третья зацепляющая муфта C3 --> третий вал 13 --> ведущий вал 18 --> ведущие колеса 19", и трактом, который соединяется из "двигатель ICE внутреннего сгорания --> первый вал 11 --> вторая зацепляющая муфта C2 --> третий вал 13 --> ведущий вал 18 --> ведущие колеса 19", как проиллюстрировано на фиг. 11B.
Таким образом, крутящий момент MG1 из первого мотора-генератора MG1 и крутящий момент ICE из двигателя ICE внутреннего сгорания должны передаваться на ведущие колеса 19.
[0089] С другой стороны, на блок-схемах последовательности операций способа, проиллюстрированных на фиг. 5A и 5B, процесс переходит от "этап S5 --> этап S6", и определяется то, представляет собой или нет запрос на изменение режима во время t3 запрос в соответствии с изменением скорости транспортного средства. Здесь, величина открытия позиции педали акселератора поддерживает постоянное значение от времени t1. Помимо этого, скорость транспортного средства продолжает повышаться от времени t2. Таким образом, этот запрос на изменение режима во время t3 представляет собой запрос в соответствии с изменением скорости транспортного средства. Соответственно, процесс переходит к "этап S6 --> этап S7", и максимальное значение движущей силы в HEV-режиме задается равным значению, которое является эквивалентным максимальной выводимой движущей силе в EV-режиме ("EV первая ICE-") во время изменения режима.
[0090] Здесь, в "EV первая ICE вторая", которая представляет собой HEV-режим, максимальная движущая сила, которая может выводиться посредством источников приведения в движение (максимальная выводимая движущая сила), значительно увеличивается посредством суммирования крутящего момента ICE с крутящим моментом MG1, по сравнению с "EV первая ICE-", которая представляет собой EV-режим, как проиллюстрировано на фиг. 10.
Напротив, посредством задания максимального значения движущей силы в HEV-режиме равным значению, которое является эквивалентным максимальной выводимой движущей силе в EV-режиме ("EV первая ICE-") во время изменения режима, движущая сила, которая передается на ведущие колеса 19, ограничена, даже если требуемая движущая сила является высокой. Таким образом, независимо от требуемой движущей силы, рабочая точка, которая входит в область выбора "EV первая ICE вторая" на карте переключения передач, проиллюстрированной на фиг. 10, переходит на сегмент линии, показанном стрелкой к правой стороне, в соответствии с увеличением скорости транспортного средства.
[0091] Таким образом, когда двигатель ICE внутреннего сгорания запускается, и формируется крутящий момент ICE, крутящий момент MG1 уменьшается на абсолютную величину, идентичную абсолютной величине сформированного крутящего момента ICE в первом моторе/генераторе MG1, чтобы подавлять увеличение G транспортного средства, как проиллюстрировано на фиг. 9. За счет этого можно подавлять флуктуацию в G транспортного средства во время изменения режима из EV-режима в HEV-режим. В таком случае, можно обеспечивать то, что толчок при изменении режима испытывается с меньшей вероятностью, даже если изменение режима осуществляется в соответствии с изменением скорости транспортного средства, и чувствительность водителя к толчку является высокой. Таким образом, можно выполнять изменение режима без вызывания дискомфорта у водителя.
[0092] В случае если крутящий момент MG1 не уменьшается во время изменения режима из EV-режима в HEV-режим без ограничения максимального значения движущей силы в HEV-режиме, G транспортного средства, которое представляет собой движущую силу, которая передается на ведущие колеса 19, внезапно увеличивается на величину крутящего момента ICE, во время t3 изменения режима, как проиллюстрировано посредством пунктирной линии на фиг. 9. Следовательно, водитель должен подвергаться толчку при изменении режима, даже если водитель не нажимает педаль акселератора, и должен испытывать дискомфорт.
[0093] После этого, максимальная выводимая движущая сила в HEV-режиме уменьшается по мере того, как максимальная выводимая движущая сила первого мотора/генератора MG1 уменьшается в соответствии с увеличением скорости транспортного средства (см. фиг. 10). Затем во время t4, максимальная выводимая движущая сила в HEV-режиме становится равной или меньше максимальной выводимой движущей силы в EV-режиме ("EV первая ICE-") во время изменения режима. Таким образом, рабочая точка перемещается в позицию P2 на карте переключения передач, проиллюстрированной на фиг. 10.
[0094] Соответственно, процесс переходит от "этап S8 --> этап S9", и максимальное значение движущей силы в HEV-режиме задается равным максимальной выводимой движущей силе в HEV-режиме. Таким образом, после времени t4, рабочая точка перемещается из позиции P2 в правую сторону на сегменте линии, указывающем максимальную выводимую движущую силу, в соответствии с увеличением скорости транспортного средства, как проиллюстрировано посредством стрелки на фиг. 10.
За счет этого можно завершать управление подавлением крутящего момента MG1, при подавлении больших флуктуаций в G транспортного средства, которое представляет собой движущую силу, которая передается на ведущие колеса 19.
[0095] Операция неограничения движущей силы во время высокого SOC
Фиг. 12 является временной диаграммой, иллюстрирующей каждую из характеристик из скорости транспортного средства/G транспортного средства/величины открытия позиции педали акселератора/частоты вращения MG1/частоты вращения ICE, когда режим переходит из "EV --> HEV" в соответствии с изменением требуемой движущей силы во время высокого SOC, в первом варианте осуществления. Ниже описывается операция неограничения движущей силы во время высокого SOC, на основе блок-схем последовательности операций способа, проиллюстрированных на фиг. 5A и 5B, и временной диаграммы, проиллюстрированной на фиг. 12. "G транспортного средства", "частота вращения MG1", "частота вращения ICE", "крутящий момент MG1" и "крутящий момент ICE" являются идентичными элементам на фиг. 9.
[0096] В гибридном транспортном средстве первого варианта осуществления, рассматривается состояние, в котором движение по инерции рекуперативного движения выполняется посредством операции снятия ноги с педали акселератора, в состоянии, в котором SOC аккумулятора является относительно высоким (равным или большим порогового значения SOC). В это время, процесс переходит от "этап S1 --> этап S2" на блок-схеме последовательности операций способа, показанной на фиг. 5A, и "карта переключения передач во время высокого SOC", проиллюстрированная на фиг. 6, выбирается в качестве карты переключения передач. Затем процесс переходит от "этап S3 --> этап S4 --> этап S5".
Перед временем t11, как показано на фиг. 12, скорость транспортного средства формируется, но педаль акселератора не нажимается. Соответственно, рабочая точка существует в позиции P3 на карте переключения передач, как проиллюстрировано на фиг. 13, так что ступень переключения передач многоступенчатой зубчатой трансмиссии 1 задается в "EV первая ICE-", и третья зацепляющая муфта C3 задается в позиции "слева". Первый мотор/генератор MG1 выполняет рекуперацию. Посредством первого мотора/генератора MG1, выполняющего рекуперацию, рекуперативная тормозная сила формируется, что приводит к тому, что замедление действует на кузов транспортного средства, и скорость транспортного средства снижается. Таким образом, рабочая точка на карте переключения передач постепенно перемещается из позиции P3к левой стороне вдоль стрелки, как показано на фиг. 13, в соответствии с уменьшением скорости транспортного средства. Поскольку рабочая точка перемещается внутри области выбора "EV первая ICE-", запрос на изменение режима из EV-режима в HEV-режим не выводится, и последовательность операций "этап S3 --> этап S4 --> этап S5" повторяется.
[0097] Когда педаль акселератора нажимается во время t11, величина открытия позиции педали акселератора увеличивается. В это время, требуемая движущая сила водителя, отражаемая в величине открытия позиции педали акселератора, должна быть абсолютной величиной, указываемой посредством пунктирной линии на фиг. 13.
[0098] После этого, когда педаль акселератора нажимается, и требуемая движущая сила водителя формируется, рабочая точка на карте переключения передач, которая перемещена в позицию P4, поднимается вдоль стрелки из позиции P4 и перемещается из области выбора "EV первая ICE-" в область выбора "EV первая ICE вторая". Как результат, запрос на изменение режима из EV-режима в HEV-режим выводится. Как результат, ступень переключения передач многоступенчатой зубчатой трансмиссии 1 задается в "EV первая ICE вторая", и вторая зацепляющая муфта C2 задается в позиции "слева". Помимо этого, первый мотор/генератор MG1 переключается из рекуперации на приведение в действие, и двигатель ICE внутреннего сгорания запускается посредством второго мотора/генератора MG2.
[0099] С другой стороны, на блок-схемах последовательности операций способа, проиллюстрированных на фиг. 5A и 5B, процесс переходит от "этап S5 --> этап S6", и определяется то, представляет собой или нет запрос на изменение режима во время t11 запрос в соответствии с изменением скорости транспортного средства. Здесь, величина открытия позиции педали акселератора увеличивается во время t11, и запрос на изменение режима в этом времени t11 представляет собой запрос в соответствии с изменением требуемой движущей силы водителя. Соответственно, процесс переходит от "этап S6 --> этап S9", и максимальное значение движущей силы в HEV-режиме задается равным максимальной выводимой движущей силе (максимальной движущей силе) в HEV-режиме.
[0100] Как результат, максимальное значение движущей силы не ограничено в HEV-режиме, и появляется возможность выводить для максимальной движущей силе. Таким образом, рабочая точка, которая входит в область выбора "EV первая ICE вторая", переходит на сегменте линии, указывающем максимальную выводимую движущую силу, в позиции P5, как указано посредством стрелки на фиг. 13.
[0101] Соответственно, во время t12, когда двигатель ICE внутреннего сгорания запускается, и крутящий момент ICE формируется, крутящий момент ICE суммируется с крутящим моментом MG1, и G транспортного средства дополнительно увеличивается, как проиллюстрировано на фиг. 12. Как результат, можно достигать увеличения движущей силы, которая передается на ведущие колеса 19, посредством изменения режима из EV-режима в HEV-режим и быстро реагировать на требуемую движущую силу водителя.
Помимо этого, флуктуация в G транспортного средства в соответствии с изменением режима возникает без ограничения максимального значения движущей силы в HEV-режиме. Тем не менее, поскольку водитель нажимает педаль акселератора, чувствительность к толчку является относительно низкой, и поскольку первый мотор/генератор MG1 переключается из рекуперативного состояния в состояние вождения, G транспортного средства сразу находится в состоянии возрастания перед изменением режима, как проиллюстрировано на фиг. 12. Соответственно, водитель с меньшей вероятностью должен испытывать дискомфорт относительно толчка при изменении режима и может разрешать толчок при изменении режима.
[0102] Если максимальное значение движущей силы в HEV-режиме ограничено, например, максимальной выводимой движущей силой в EV-режиме ("EV первая ICE-") во время изменения режима, увеличение G транспортного средства, которое представляет собой движущую силу, которая передается на ведущие колеса 19, подавляется, как указано посредством пунктирной линии на фиг. 9, во время изменения режима из EV-режима в HEV-режим. Следовательно, в то время как толчок при изменении режима уменьшается, требуемая движущая сила водителя и движущая сила, которая передается на ведущие колеса 19, значительно отклоняются.
Как результат, водитель не должен подвергаться увеличению движущей силы в качестве ощущения, даже если водитель нажимает педаль акселератора, и должен испытывать дискомфорт.
[0103] Операция ограничения движущей силы во время низкого SOC
Фиг. 14 является временной диаграммой, иллюстрирующей каждую из характеристик из скорости транспортного средства/G транспортного средства/величины открытия позиции педали акселератора/частоты вращения MG1/частоты вращения ICE, когда режим переходит из "EV --> HEV" в соответствии с изменением скорости транспортного средства во время низкого SOC, в первом варианте осуществления. Ниже описывается операция ограничения движущей силы во время низкого SOC, на основе блок-схем последовательности операций способа, проиллюстрированных на фиг. 5A и 5B, и временной диаграммы, проиллюстрированной на фиг. 14. "G транспортного средства", "частота вращения MG1", "частота вращения ICE", "крутящий момент MG1" и "крутящий момент ICE" являются идентичными элементам на фиг. 9.
[0104] В гибридном транспортном средстве первого варианта осуществления, рассматривается остановленное состояние, в котором как первый мотор/генератор MG1, так и двигатель ICE внутреннего сгорания остановлены, в состоянии, в котором SOC аккумулятора является относительно низким (меньшим порогового значения SOC). В это время, процесс переходит от "этап S1 --> этап S10" на блок-схеме последовательности операций способа, показанной на фиг. 5A, и "карта переключения передач во время низкого SOC", проиллюстрированная на фиг. 7, задается в качестве карты переключения передач. Затем процесс переходит от "этап S11 --> этап S12 --> этап S13". Перед временем t21, показанным на фиг. 14, величина открытия позиции педали акселератора и скорость транспортного средства равны нулю. Соответственно, рабочая точка существует в позиции P6 на карте переключения передач, как проиллюстрировано на фиг. 15, и первая, вторая и третья зацепляющие муфты C1, C2, C3 задаются в "нейтраль" в многоступенчатой зубчатой трансмиссии 1. Помимо этого, поскольку рабочая точка не перемещается, запрос на изменение режима из EV-режима в HEV-режим не выводится, и последовательность операций "этап S11 --> этап S12 --> этап S13" повторяется.
[0105] Когда педаль акселератора нажимается во время t21, величина открытия позиции педали акселератора увеличивается. В это время, требуемая движущая сила водителя, отражаемая в величине открытия позиции педали акселератора, должна быть абсолютной величиной, указываемой посредством пунктирной линии на фиг. 15.
[0106] После этого, когда нажимается педаль акселератора, и формируется требуемая движущая сила водителя, рабочая точка на карте переключения передач перемещается из позиции P6 в позицию P7. Как результат, ступень переключения передач многоступенчатой зубчатой трансмиссии 1 задается в "последовательный, EV первая (последовательный EV-режим во "EV первая ICE-")", и третья зацепляющая муфта C3 задается в позиции "слева". Затем первый мотор/генератор MG1 приводится в действие, и двигатель ICE внутреннего сгорания приводится в действие посредством второго мотора/генератора MG2, чтобы вырабатывать мощность во втором моторе/генераторе MG2.
Как результат, формируется выходной крутящий момент первого мотора/генератора MG1, и частота вращения первого мотора/генератора MG1 начинает повышаться от времени t22. С другой стороны, поскольку второй мотор/генератор MG2 принудительно вырабатывает мощность, формируется крутящий момент при выработке мощности двигателя ICE внутреннего сгорания, и увеличивается частота вращения двигателя ICE внутреннего сгорания.
Соответственно, ускорение действует на кузов транспортного средства, чтобы формировать G транспортного средства, и скорость транспортного средства начинает повышаться. Здесь, абсолютная величина G транспортного средства является пропорциональной крутящему моменту MG1. С другой стороны, значение скорости транспортного средства является пропорциональным частоте вращения MG1. Помимо этого, тракт передачи мощности приведения в движение в это время соединяется из "первый мотор-генератор MG1 --> второй вал 12 --> третья зацепляющая муфта C3 --> третий вал 13 --> ведущий вал 18 --> ведущие колеса 19", как проиллюстрировано на фиг. 16A. Таким образом, только крутящий момент MG1 из первого мотора-генератора MG1 должен передаваться на ведущие колеса 19.
Поскольку мощность вырабатывается во втором моторе/генераторе MG2, крутящий момент при выработке мощности, который выводится из двигателя ICE внутреннего сгорания, передается из двигателя ICE внутреннего сгорания --> первый вал 11 --> четвертый вал 14 --> пятый вал 15 --> шестой вал 16 --> второй мотор/генератор MG2.
[0107] После этого, когда скорость транспортного средства увеличивается, рабочая точка на карте переключения передач, проиллюстрированной на фиг. 15, также перемещается, в соответствии с этим увеличением скорости транспортного средства. В это время, величина открытия позиции педали акселератора поддерживается равной постоянному значению, и требуемая движущая сила водителя также поддерживает значение, указываемое посредством пунктирной линии. Соответственно, поскольку максимальная выводимая движущая сила ниже требуемой движущей силы, рабочая точка перемещается из позиции P7 в правую сторону на сегменте линии, указывающем максимальную выводимую движущую силу, в соответствии с повышением скорости транспортного средства, как проиллюстрировано посредством стрелки на фиг. 15.
[0108] Когда скорость транспортного средства превышает V1 во время t23, рабочая точка, которая перемещена в позицию P8 на карте переключения передач, перемещается из области выбора "последовательный, EV первая" в область выбора "EV первая ICE первая". Как результат, запрос на изменение режима из EV-режима в HEV-режим выводится. Таким образом, ступень переключения передач многоступенчатой зубчатой трансмиссии 1 задается в "EV первая ICE первая", первая зацепляющая муфта C1 задается в позиции "слева", и выходной крутящий момент двигателя ICE внутреннего сгорания передается на ведущие колеса 19. Помимо этого, тракт передачи мощности приведения в движение в это время становится трактом, который соединяется из "первый мотор-генератор MG1 --> второй вал 12 --> третья зацепляющая муфта C3 --> третий вал 13 --> ведущий вал 18 --> ведущие колеса 19", и трактом, который соединяется из "двигатель ICE внутреннего сгорания --> первый вал 11 --> четвертый вал 14 --> первая зацепляющая муфта C1 --> второй вал 12 --> третья зацепляющая муфта C3 --> третий вал 13 --> ведущий вал 18 --> ведущие колеса 19", как проиллюстрировано на фиг. 16B.
Таким образом, крутящий момент MG1 из первого мотора-генератора MG1 и крутящий момент ICE из двигателя ICE внутреннего сгорания должны передаваться на ведущие колеса 19.
[0109] С другой стороны, на блок-схемах последовательности операций способа, проиллюстрированных на фиг. 5A и 5B, процесс переходит от "этап S13 --> этап S14", и определяется то, представляет собой или нет запрос на изменение режима во время t23 запрос в соответствии с изменением скорости транспортного средства. Здесь, величина открытия позиции педали акселератора поддерживает постоянное значение от времени t21. Помимо этого, скорость транспортного средства продолжает повышаться от времени t21. Таким образом, этот запрос на изменение режима во время t23 представляет собой запрос в соответствии с изменением скорости транспортного средства. Следовательно, процесс переходит от "этап S14 --> этап S15 --> этап S16", и градиент θ увеличения движущей силы в HEV-режиме задается на основе SOC аккумулятора считывания и карты, проиллюстрированной на фиг. 8B.
[0110] Затем процесс переходит к этапу S17, и максимальное значение движущей силы в HEV-режиме ("EV первая ICE первая") задается равным значению, которое изменяется (увеличивается) с максимальной выводимой движущей силы в EV-режиме ("последовательный, EV первая") во время изменения режима с градиентом θ увеличения, в соответствии с увеличением скорости транспортного средства.
Как результат, хотя G транспортного средства увеличивается со времени t23, его градиент увеличения задается равным θ, как проиллюстрировано на фиг. 14. Соответственно, по сравнению со случаем, в котором максимальное значение движущей силы в HEV-режиме не ограничено (показано посредством пунктирной линии на фиг. 14), увеличение G транспортного средства подавляется, и можно подавлять флуктуацию в G транспортного средства во время изменения режима из EV-режима в HEV-режим.
[0111] Таким образом, рабочая точка, которая входит в область выбора "EV первая ICE первая" из позиции P8, перемещается из максимальной выводимой движущей силы в EV-режиме во время изменения режима ("Tα" на фиг. 15) в правую сторону на сегменте линии, показанном стрелкой на фиг. 15. Соответственно, можно подавлять увеличение движущей силы во время изменения режима и подавлять флуктуацию в G транспортного средства.
[0112] Кроме того, этот градиент θ увеличения задается согласно SOC аккумулятора, и градиент θ увеличения задается равным более высокому значению по мере того, как снижается SOC аккумулятора (см. фиг. 8B). Таким образом, величина подавления максимального значения движущей силы в HEV-режиме становится меньшей по мере того, как снижается SOC аккумулятора.
Здесь, чтобы подавлять движущую силу в HEV-режиме, выходной крутящий момент двигателя ICE внутреннего сгорания (крутящий момент ICE) управляется, чтобы подавлять этот крутящий момент ICE относительно максимального выводимого крутящего момента, указываемого посредством пунктирной линии, как проиллюстрировано на фиг. 14. Соответственно, крутящий момент ICE становится больше по мере того, как снижается SOC аккумулятора, и можно подавлять потребление аккумулятора 3 с высоким уровнем мощности.
[0113] Далее описываются преимущества.
Нижеперечисленные преимущества могут получаться посредством устройства управления движущей силой для гибридного транспортного средства согласно первому варианту осуществления.
[0114] (1) В гибридном транспортном средстве, допускающем изменение режима между EV-режимом, в котором только электромотор (первый мотор/генератор MG1) используется в качестве источника приведения в движение, и HEV-режимом, в котором электромотор (первый мотор/генератор MG1) и двигатель ICE внутреннего сгорания используются в качестве источников приведения в движение, и которое не имеет элемента поглощения дифференциального вращения в приводной системе, содержащее:
- модуль управления движущей силой (гибридный модуль 21 управления), который управляет движущей силой на ведущие колеса 19 в соответствии с требуемой движущей силой в диапазоне максимальной выводимой движущей силы источника приведения в движение, и
- модуль управления движущей силой (гибридный модуль 21 управления) ограничивает движущую силу, передаваемую на ведущие колеса 19 в HEV-режиме, в соответствии с максимальной выводимой движущей силой в EV-режиме во время изменения режима, когда режим переходит из EV-режима в HEV-режим в то время, когда возникает изменение скорости транспортного средства.
Соответственно, в гибридном транспортном средстве, которое не имеет элемента поглощения дифференциального вращения, можно обеспечивать то, что толчок при изменении режима, который возникает, когда режим переходит из EV-режима в HEV-режим, испытывается с меньшей вероятностью, даже когда чувствительность водителя к толчку является высокой.
[0115] (2) Модуль управления движущей силой (гибридный модуль 21 управления) не ограничивает движущую силу, передаваемую на ведущие колеса 19 в HEV-режиме, относительно максимальной выводимой движущей силы в HEV-режиме, когда режим переходит из EV-режима в HEV-режим в то время, когда возникает изменение требуемой движущей силы водителем.
Соответственно, помимо преимущества (1), можно достигать увеличения движущей силы, которая передается на ведущие колеса 19, во время увеличения требуемой движущей силы водителя и быстро реагировать на требуемую движущую силу водителя.
[0116] (3) При ограничении движущей силы, передаваемой на ведущие колеса 19 в HEV-режиме, модуль управления движущей силой (гибридный модуль 21 управления) задает градиент θ увеличения движущей силы, передаваемой на ведущие колеса 19 в HEV-режиме, равным большему значению по мере того, как оставшаяся величина заряда (SOC аккумулятора) аккумулятора (аккумулятора 3 с высоким уровнем мощности), который подает электрическую мощность в электромотор (первый мотор/генератор MG1), становится более низкой.
Соответственно, помимо преимущества (1) или (2), крутящий момент ICE увеличивается, когда SOC аккумулятора является низким, и можно подавлять потребление аккумулятора 3 с высоким уровнем мощности.
[0117] Второй вариант осуществления
Второй вариант осуществления является примером, в котором максимальная выводимая движущая сила в EV-режиме ниже пикового значения, во время изменения режима из EV-режима в HEV-режим, на "карте переключения передач во время высокого SOC".
[0118] Во втором варианте осуществления, карта переключения передач, проиллюстрированная на фиг. 17, используется в качестве "карты переключения передач во время высокого SOC", которая задается, когда SOC аккумулятора является относительно высоким.
На этой "карте переключения передач во время высокого SOC", проиллюстрированной на фиг. 17, назначение каждой области выбора является идентичным на "карте переключения передач во время высокого SOC" в первом варианте осуществления (см. фиг. 6), но абсолютная величина максимальной выводимой движущей силы в "EV первая ICE-", которая представляет собой EV-режим, отличается.
[0119] Таким образом, на "карте переключения передач во время высокого SOC" первого варианта осуществления, максимальная выводимая движущая сила является постоянным значением от нулевой скорости транспортного средства до скорости V0 транспортного средства, при которой режим переходит в HEV-режим, как проиллюстрировано на фиг. 6. Напротив, на "карте переключения передач во время высокого SOC" второго варианта осуществления, проиллюстрированной на фиг. 17, в то время как максимальная выводимая движущая сила является постоянным значением от нулевой скорости транспортного средства до скорости V2 транспортного средства, максимальная выводимая движущая сила постепенно уменьшается в соответствии с увеличением скорости транспортного средства относительно скорости V2 транспортного средства.
[0120] После этого, на скорости транспортного средства V3, на которой режим переходит в HEV-режим, максимальная выводимая движущая сила в EV-режиме ниже пикового значения. Помимо этого, в HEV-режиме ("EV первая ICE вторая"), максимальная выводимая движущая сила значительно увеличивается, когда суммируется выходной крутящий момент двигателя ICE внутреннего сгорания.
[0121] Ниже описывается "операция ограничения движущей силы во время высокого SOC" при использовании такой "карты переключения передач во время высокого SOC".
Фиг. 18 является временной диаграммой, иллюстрирующей каждую из характеристик из скорости транспортного средства/G транспортного средства/величины открытия позиции педали акселератора/частоты вращения MG1/частоты вращения ICE, когда режим переходит из "EV --> HEV" в соответствии с изменением скорости транспортного средства во время высокого SOC, во втором варианте осуществления. Ниже описывается операция ограничения движущей силы во время высокого SOC во втором варианте осуществления, на основе временной диаграммы, проиллюстрированной на фиг. 18. "G транспортного средства", "частота вращения MG1", "частота вращения ICE", "крутящий момент MG1" и "крутящий момент ICE" являются идентичными элементам на фиг. 9.
[0122] В гибридном транспортном средстве второго варианта осуществления, когда как первый мотор/генератор MG1, так и двигатель ICE внутреннего сгорания остановлены, в состоянии, в котором SOC аккумулятора является относительно высоким (равным или большим порогового значения SOC), педаль акселератора нажимается, и величина открытия позиции педали акселератора увеличивается во время t31, как показано на фиг. 18. В это время, требуемая движущая сила водителя, отражаемая в величине открытия позиции педали акселератора, должна быть абсолютной величиной, указываемой посредством пунктирной линии на фиг. 19.
[0123] После этого, когда нажимается педаль акселератора, и формируется требуемая движущая сила водителя, рабочая точка на карте переключения передач перемещается из позиции P9 в позицию P10. Как результат, ступень переключения передач многоступенчатой зубчатой трансмиссии 1 задается в "EV первая ICE-", и первый мотор/генератор MG1 приводится в действие. Как результат, формируется выходной крутящий момент первого мотора/генератора MG1, и частота вращения первого мотора/генератора MG1 начинает повышаться от времени t32. Соответственно, ускорение действует на кузов транспортного средства, чтобы формировать G транспортного средства, и скорость транспортного средства начинает повышаться.
[0124] После этого, рабочая точка на карте переключения передач, проиллюстрированной на фиг. 19, также перемещается, в соответствии с увеличением скорости транспортного средства. В это время, величина открытия позиции педали акселератора поддерживается равной постоянному значению, и требуемая движущая сила водителя также поддерживает значение, указываемое посредством пунктирной линии. Соответственно, рабочая точка перемещается из позиции P10 в правую сторону на сегменте линии, указывающем максимальную выводимую движущую силу, в соответствии с увеличением скорости транспортного средства, как проиллюстрировано посредством стрелки на фиг. 19.
[0125] После этого, когда скорость транспортного средства достигает V2 во время t33, уменьшений максимальной выводимой движущей силы в соответствии с увеличением скорости транспортного средства. Таким образом, рабочая точка перемещается из позиции P11 в позицию P12 на карте переключения передач. Помимо этого, крутящий момент MG1 постепенно уменьшается, и G транспортного средства также уменьшается.
[0126] Когда скорость транспортного средства превышает V3 во время t34, рабочая точка, которая перемещена в позицию P12 на карте переключения передач, проиллюстрированной на фиг. 19, перемещается из области выбора "EV первая ICE-" в область выбора "EV первая ICE вторая". Как результат, запрос на изменение режима из EV-режима в HEV-режим выводится. Таким образом, ступень переключения передач многоступенчатой зубчатой трансмиссии 1 задается в "EV первая ICE вторая", и двигатель ICE внутреннего сгорания запускается.
[0127] Затем в то время как требуемая движущая сила в это время является постоянной, скорость транспортного средства продолжает увеличиваться. Следовательно, запрос на изменение режима во время t34 предположительно должен выполняться в соответствии с изменением скорости транспортного средства, и максимальное значение движущей силы в HEV-режиме задается равным значению, которое является эквивалентным максимальной выводимой движущей силе в EV-режиме ("EV первая ICE-") во время изменения режима.
Таким образом, максимальная выводимая движущая сила в EV-режиме ("EV первая ICE-") уменьшается со времени t33 и становится Tβ во время t34. Соответственно, максимальное значение движущей силы в HEV-режиме задается равным "Tβ", что ниже пика максимальной выводимой движущей силы в EV-режиме.
[0128] Как результат, движущая сила, которая передается на ведущие колеса 19, ограничена "Tβ", даже если требуемая движущая сила является высокой, и рабочая точка, которая входит в область выбора "EV первая ICE вторая" на карте переключения передач, проиллюстрированной на фиг. 19, должна перемещаться из позиции 12 на сегменте линии, показанном стрелкой, в соответствии с увеличением скорости транспортного средства.
[0129] Таким образом, когда двигатель ICE внутреннего сгорания запускается, и формируется крутящий момент ICE, крутящий момент MG1 уменьшается на абсолютную величину, идентичную абсолютной величине сформированного крутящего момента ICE в первом моторе/генераторе MG1, чтобы подавлять увеличение G транспортного средства, как проиллюстрировано на фиг. 18. За счет этого можно подавлять флуктуацию в G транспортного средства во время изменения режима из EV-режима в HEV-режим. В таком случае, можно обеспечивать то, что толчок при изменении режима ощущается с меньшей вероятностью, даже если изменение режима осуществляется в соответствии с изменением скорости транспортного средства, и чувствительность водителя к толчку является высокой. Таким образом, можно выполнять изменение режима без вызывания дискомфорта у водителя.
[0130] В случае если крутящий момент MG1 не уменьшается во время изменения режима из EV-режима в HEV-режим без ограничения максимального значения движущей силы в HEV-режиме, G транспортного средства, которое представляет собой движущую силу, которая передается на ведущие колеса 19, внезапно увеличивается на величину крутящего момента ICE, во время t34 изменения режима, как проиллюстрировано посредством пунктирной линии на фиг. 18. Следовательно, водитель должен подвергаться толчку при изменении режима, даже если водитель не нажимает педаль акселератора, и должен испытывать дискомфорт.
[0131] После этого, максимальная выводимая движущая сила в HEV-режиме уменьшается в соответствии с увеличением скорости транспортного средства, и максимальная выводимая движущая сила в HEV-режиме становится равной или меньше максимальной выводимой движущей силы в EV-режиме ("EV первая ICE-") во время изменения режима. Таким образом, рабочая точка перемещается в позицию P13 на карте переключения передач, проиллюстрированной на фиг. 19. Соответственно, максимальное значение движущей силы в HEV-режиме задается равным максимальной выводимой движущей силе в HEV-режиме. Таким образом, после времени t35, рабочая точка перемещается из позиции P13 в правую сторону на сегменте линии, указывающем максимальную выводимую движущую силу, в соответствии с увеличением скорости транспортного средства, как проиллюстрировано посредством стрелки на фиг. 19.
За счет этого можно завершать управление подавлением крутящего момента MG1, при подавлении больших флуктуаций в G транспортного средства, которое представляет собой движущую силу, которая передается на ведущие колеса 19.
[0132] Таким образом, когда максимальная выводимая движущая сила в EV-режиме во время изменения режима из EV-режима в HEV-режим ниже пикового значения, как указано в этом втором варианте осуществления, максимальное значение движущей силы в HEV-режиме ограничено в соответствии с этой уменьшенной максимальной выводимой движущей силой.
Соответственно, можно подавлять изменение (увеличение) G транспортного средства, которое представляет собой движущую силу, передаваемую на ведущие колеса 19, даже если крутящий момент ICE суммируется с крутящим моментом MG1 вследствие изменения режима на HEV-режим, и подавлять дискомфорт, даже если чувствительность водителя к толчку является высокой.
[0133] Помимо этого, в то время как максимальное значение движущей силы, передаваемой на ведущие колеса 19, управляется посредством подавления крутящего момента MG1 на величину крутящего момента ICE, которая суммируется, ограничение максимального значения движущей силы в HEV-режиме продолжается до тех пор, пока максимальная выводимая движущая сила в HEV-режиме не станет равной или меньше максимальной выводимой движущей силы в EV-режиме ("EV первая ICE-") во время изменения режима.
Следовательно, можно завершать управление подавлением крутящего момента MG1, при подавлении больших флуктуаций в G транспортного средства, которое представляет собой движущую силу, которая передается на ведущие колеса 19.
[0134] Нижеперечисленные преимущества могут получаться посредством устройства управления движущей силой для гибридного транспортного средства согласно второму варианту осуществления.
[0135] (4) При ограничении движущей силы, передаваемой на ведущие колеса 19 в HEV-режиме, модуль управления движущей силой (гибридный модуль 21 управления) ограничивает максимальное значение движущей силы, передаваемой на ведущие колеса 19 в HEV-режиме, равным значению, эквивалентному максимальной выводимой движущей силе в EV-режиме во время изменения режима до тех пор, пока максимальная выводимая движущая сила в HEV-режиме не станет значением, эквивалентным максимальной выводимой движущей силе в EV-режиме во время изменения режима.
Соответственно, можно завершать управление подавлением крутящего момента MG1, при подавлении больших флуктуаций в G транспортного средства, которое представляет собой движущую силу, которая передается на ведущие колеса 19.
[0136] Устройство управления движущей силой для гибридного транспортного средства настоящего изобретения описано выше на основе первого варианта осуществления и второго варианта осуществления, но его конкретные конфигурации не ограничены этими вариантами осуществления, и различные модификации и добавления в конструктивные решения могут вноситься без отступления от объема изобретения согласно каждому пункту в формуле изобретения.
[0137] В первом варианте осуществления и втором варианте осуществления, показан пример, в котором крутящий момент MG1, который представляет собой выходной крутящий момент первого мотора/генератора MG1, уменьшается на величину крутящего момента ICE, при ограничении движущей силы, передаваемой на ведущие колеса 19 в HEV-режиме, но изобретение не ограничено этим.
В случае использования "карты переключения передач во время высокого SOC" первого варианта осуществления (см. фиг. 6), когда режим изменяется из EV-режима в HEV-режим в соответствии с изменением скорости транспортного средства во время t41, крутящий момент ICE, который представляет собой выходной крутящий момент двигателя ICE внутреннего сгорания, подавляется в большей степени, чем тогда, когда выполняется максимальный вывод (проиллюстрировано посредством пунктирной линии), как проиллюстрировано на фиг. 20. Помимо этого, в случае использования "карты переключения передач во время высокого SOC" второго варианта осуществления (см. фиг. 17), когда режим изменяется из EV-режима в HEV-режим в соответствии с изменением скорости транспортного средства во время t51, крутящий момент ICE, который представляет собой выходной крутящий момент двигателя ICE внутреннего сгорания, подавляется в большей степени, чем тогда, когда выполняется максимальный вывод (проиллюстрировано посредством пунктирной линии), как проиллюстрировано на фиг. 20. Таким образом, крутящий момент ICE может подавляться при подавлении изменения (увеличения) G транспортного средства, которое указывает движущую силу, передаваемую на ведущие колеса 19.
[0138] Дополнительно, при подавлении изменения (увеличения) G транспортного средства, которое указывает движущую силу, передаваемую на ведущие колеса 19, изменение (увеличение) G транспортного средства, которое указывает движущую силу, передаваемую на ведущие колеса 19, может подавляться посредством управления (подавления) как крутящим моментом MG1, так и крутящим моментом ICE.
[0139] Кроме того, в первом и втором вариантах осуществления, показан пример, в котором устройство управления движущей силой настоящего изобретения применяется к гибридному транспортному средству, содержащему, в качестве компонентов приводной системы, один двигатель внутреннего сгорания (двигатель), два мотора/генератора и многоступенчатую зубчатую трансмиссию, имеющую три зацепляющих муфты. Тем не менее, устройство управления движущей силой настоящего изобретения может применяться, например, к гибридному транспортному средству, оснащенному одним двигателем и одним мотором.
Реферат
Изобретение относится к гибридным транспортным средствам. Устройство управления движущей силой для гибридного транспортного средства, допускающего изменение режима между EV-режимом, в котором только электромотор используется в качестве источника приведения в движение, и HEV-режимом, в котором электромотор и двигатель внутреннего сгорания используются в качестве источников приведения в движение, и которое не имеет элемента поглощения дифференциального вращения в приводной системе, содержит модуль управления движущей силой на ведущее колесо в соответствии с требуемой движущей силой в диапазоне максимальной выводимой движущей силы источника приведения в движение. Модуль управления движущей силой ограничивает движущую силу, передаваемую на ведущее колесо в HEV-режиме, в соответствии с максимальной выводимой движущей силой в EV-режиме во время изменения режима, когда режим переходит из EV-режима в HEV-режим в то время, когда возникает изменение скорости транспортного средства. Снижается рывок при изменении режима. 3 з.п. ф-лы, 21 ил.
Комментарии