Транспортное средство с электрическим приводом - RU2395410C1
Код документа: RU2395410C1
Чертежи





Описание
Область техники
Настоящее изобретение относится к транспортному средству с электрическим приводом, а более конкретно к транспортному средству с электрическим приводом, обеспечивающему подачу и прием электроэнергии между устройством накопления электроэнергии и источником питания или электрической нагрузкой вне транспортного средства.
Уровень техники
В публикации выложенной заявки на патент Японии № 4-295202 раскрыто устройство с электрическим приводом, обеспечивающее подачу и прием электрической энергии между источником питания переменного тока и источником питания постоянного тока, предусмотренным в транспортном средстве. Устройство с электрическим приводом включает в себя аккумулятор, инверторы IA и IB, асинхронные электродвигатели MA и MB и блок управления. Асинхронные электродвигатели MA и MB включают в себя Y-подключенные обмотки CA и CB соответственно. К нейтралям NA и NB обмоток CA и CB подключен порт ввода/вывода через радиочастотный фильтр. Предусмотрены инверторы IA и IB, соответствующие асинхронным электродвигателям MA и MB соответственно и подключенные к обмоткам CA и CB соответственно. Инверторы IA и IB подключены параллельно к аккумулятору.
В устройстве с электрическим приводом в режиме подзарядки электрическая энергия переменного тока, применяемая из однофазного источника питания, подключенного к порту ввода/вывода, к нейтралям NA и NB обмоток CA и CB, может быть преобразована в электрическую энергию постоянного тока, чтобы зарядить аккумулятор. Дополнительно можно сформировать электрическую энергию переменного тока, имеющую синусоидальную скорректированную волну по нейтралям NA и NB, и выводить сформированную электрическую энергию переменного тока на внешнее устройство, подключенное к порту ввода/вывода.
Операции включения/отключения коммутирующего элемента, включенного в инвертор, формируют электромагнитный шум в инверторе. Здесь электромагнитный шум от инвертора должен теряться среди других шумов (таких как звук работы), пока транспортное средство перемещается, и, следовательно, он в типичном варианте не представляет существенной проблемы.
Если подача и прием электрической энергии между источником питания или электрической нагрузкой вне транспортного средства и устройством накопления электроэнергии, установленным в транспортном средстве, возможны с помощью инвертора для возбуждения электродвигателя, как в устройстве с электрическим приводом, раскрытом в упомянутой выложенной заявке, должно иметь место то, что эта подача и прием электрической энергии осуществляется в то время, когда транспортное средство остановлено, и, в частности, зарядка устройства накопления электроэнергии выполняется ночью, когда транспортное средство не используется. В ходе подачи и приема электроэнергии, по существу, электромагнитный шум от инвертора является существенной проблемой. Вышеприведенная выложенная заявка не касается этой проблемы.
Дополнительно, если электроэнергия подается и принимается между источником энергии или электрической нагрузкой вне транспортного средства и источником накопления электроэнергии, установленным в транспортном средстве с помощью инвертора для возбуждения электродвигателя, выброс напряжения, формируемый в ответ на операцию включения/отключения коммутирующего элемента, включенного в инвертор, может влиять на внешний источник питания или внешнюю нагрузку. Устройство с электрическим приводом, раскрытое в выложенной заявке, имеет радиочастотный фильтр, что приводит к повышению стоимости.
Сущность изобретения
Настоящее изобретение направлено на устранение вышеописанных проблем, и его целью является создание транспортного средства с электрическим приводом, учитывающего шум, формируемый посредством инвертора, в то время когда энергия подается и принимается между источником питания или электрической нагрузкой вне электродвигателя и устройством накопления электроэнергии, установленным на транспортном средстве.
Согласно настоящему изобретению создано транспортное средство с электрическим приводом, включающее в себя вращающуюся электрическую машину, инверторное устройство, устройство накопления электроэнергии и контроллер. Инверторное устройство допускает возбуждение вращающейся электрической машины. Устройство накопления электроэнергии подает и принимает электрическую энергию в/из инверторного устройства. Контроллер управляет инверторным устройством либо в первом режиме работы (режиме движения), в котором вращающаяся электрическая машина возбуждается так, чтобы вращаться, либо во втором режиме работы (режиме зарядки/перезарядки), в котором инверторное устройство работает как преобразователь напряжения, подающий и принимающий электрическую энергию между источником накопления электроэнергии и источником питания или электрической нагрузкой вне транспортного средства. Во втором режиме работы контроллер уменьшает заданный шум, формируемый из инверторного устройства, в сравнении с первым режимом работы посредством изменения либо частоты коммутации, либо скорости коммутации коммутирующего элемента, включенного в инверторное устройство, по сравнению с первым режимом работы.
Предпочтительно, заданный шум является звуковым шумом. Во втором режиме работы контроллер изменяет частоту несущей в направлении ближе к неслышимому диапазону, чем в первом режиме работы.
Более предпочтительно, контроллер задает частоту несущей, равной первой частоте в первом режиме работы, и задает частоту несущей, равной второй частоте, выше первой частоты во втором режиме работы.
Более предпочтительно, вторая частота находится в неслышимом диапазоне.
Предпочтительно, во втором режиме работы контроллер изменяет частоту несущей только в заданное время поздней ночью.
Предпочтительно, транспортное средство с электрическим приводом дополнительно включает в себя датчик шума. Датчик шума определяет уровень шума вокруг транспортного средства. Во втором режиме работы контроллер изменяет частоту несущей только в том случае, когда уровень шума, определяемый посредством датчика шума, ниже эталонного значения.
Предпочтительно, транспортное средство с электрическим приводом дополнительно включает в себя блок ввода команд. Блок ввода команд предоставляет возможность пользователю вводить команду, чтобы запрещать изменение несущей частоты. Контроллер прекращает изменение несущей частоты, когда изменение несущей частоты запрещено посредством блока ввода команд.
Предпочтительно, заданный шум представляет собой шум в источнике питания или электрической нагрузке вне транспортного средства, вызываемый посредством выброса напряжения, формируемого с помощью операции включения/отключения коммутирующего элемента, включенного в инверторное устройство. Во втором режиме работы контроллер понижает скорость коммутации коммутирующего элемента в сравнении с первым режимом работы.
Предпочтительно, транспортное средство с электрическим приводом дополнительно включает в себя управляющую схему. Управляющая схема возбуждает коммутирующий элемент в соответствии с командой, принимаемой от контроллера. Управляющая схема включает в себя первое и второе сопротивления затвора. Первое сопротивление затвора используется в первом режиме работы. Второе сопротивление затвора используется во втором режиме работы и имеет сопротивление больше первого сопротивления затвора.
Предпочтительно, вращающаяся электрическая машина включает в себя соединенную звездой первую многофазную обмотку в качестве статорной обмотки. Транспортное средство с электрическим приводом дополнительно включает в себя еще одну вращающуюся электрическую машину и соединительное устройство. Упомянутая еще одна вращающаяся электрическая машина включает в себя соединенную звездой вторую многофазную обмотку в качестве статорной обмотки. Соединительное устройство выполнено с возможностью подачи и приема электроэнергии между первой нейтральной точкой первой многофазной обмотки, второй нейтральной точкой второй многофазной обмотки и источником питания или электрической нагрузкой вне транспортного средства. Инверторное устройство включает в себя первый и второй инверторы. Первый инвертор допускает возбуждение вращающейся электрической машины. Второй инвертор допускает возбуждение упомянутой еще одной вращающейся электрической машины. Контроллер управляет первым и вторым инверторами таким образом, чтобы в первом режиме работы электрическая энергия подавалась и принималась между устройством накопления электроэнергии и источником питания либо электрической нагрузкой вне транспортного средства, подключенной к первой и второй нейтралям посредством соединительного устройства.
Более предпочтительно, когда устройство накопления электроэнергии заряжается от источника питания вне транспортного средства во втором режиме работы, контроллер повышает напряжение, подаваемое из источника питания, посредством использования первой и второй многофазных обмоток в качестве реакторов и управления первым и вторым инвертором таким образом, чтобы первый и второй инвертор работали как плечи преобразователя напряжения.
В настоящем изобретении инверторное устройство работает либо в первом режиме работы (режиме движения), в котором вращающаяся электрическая машина возбуждается так, чтобы вращаться, либо во втором режиме работы (режиме зарядки/перезарядки), в котором инверторное устройство работает как преобразователь напряжения для подачи и приема электрической энергии между источником питания или электрической нагрузкой вне транспортного средства и источником накопления электроэнергии. Во втором режиме работы контроллер изменяет либо частоту коммутации, либо скорость коммутации коммутирующего элемента, включенного в инверторное устройство, по сравнению с первым режимом работы с тем, чтобы уменьшался заданный шум, формируемый из инверторного устройства. Следовательно, заданный шум, формируемый из инверторного устройства, может быть уменьшен, когда электрическая энергия подается и принимается между источником питания или электрической нагрузкой вне транспортного средства и источником накопления электроэнергии.
Следовательно, посредством настоящего изобретения можно уменьшать электромагнитный шум или влияние выброса напряжения на источник питания или электрическую нагрузку, когда электроэнергия подается и принимается между источником питания или силовой нагрузкой вне транспортного средства и источником накопления электроэнергии.
Краткое описание чертежей
Фиг.1 - общая блок-схема гибридного транспортного средства, показанного в качестве примера транспортного средства с электрическим приводом в соответствии с первым вариантом осуществления настоящего изобретения.
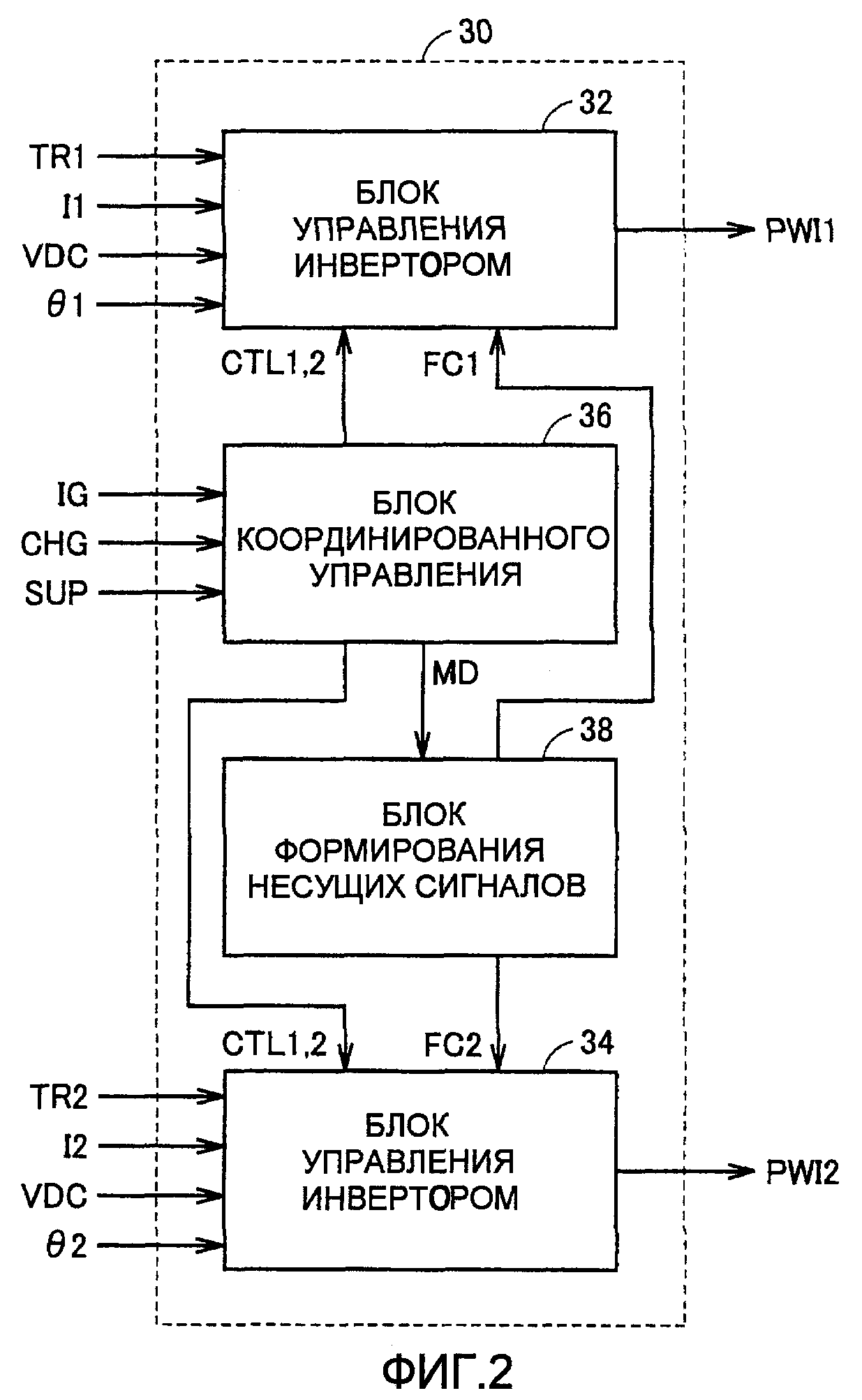
Фиг.2 - функциональная блок-схема ЭБУ, показанного на фиг.1.
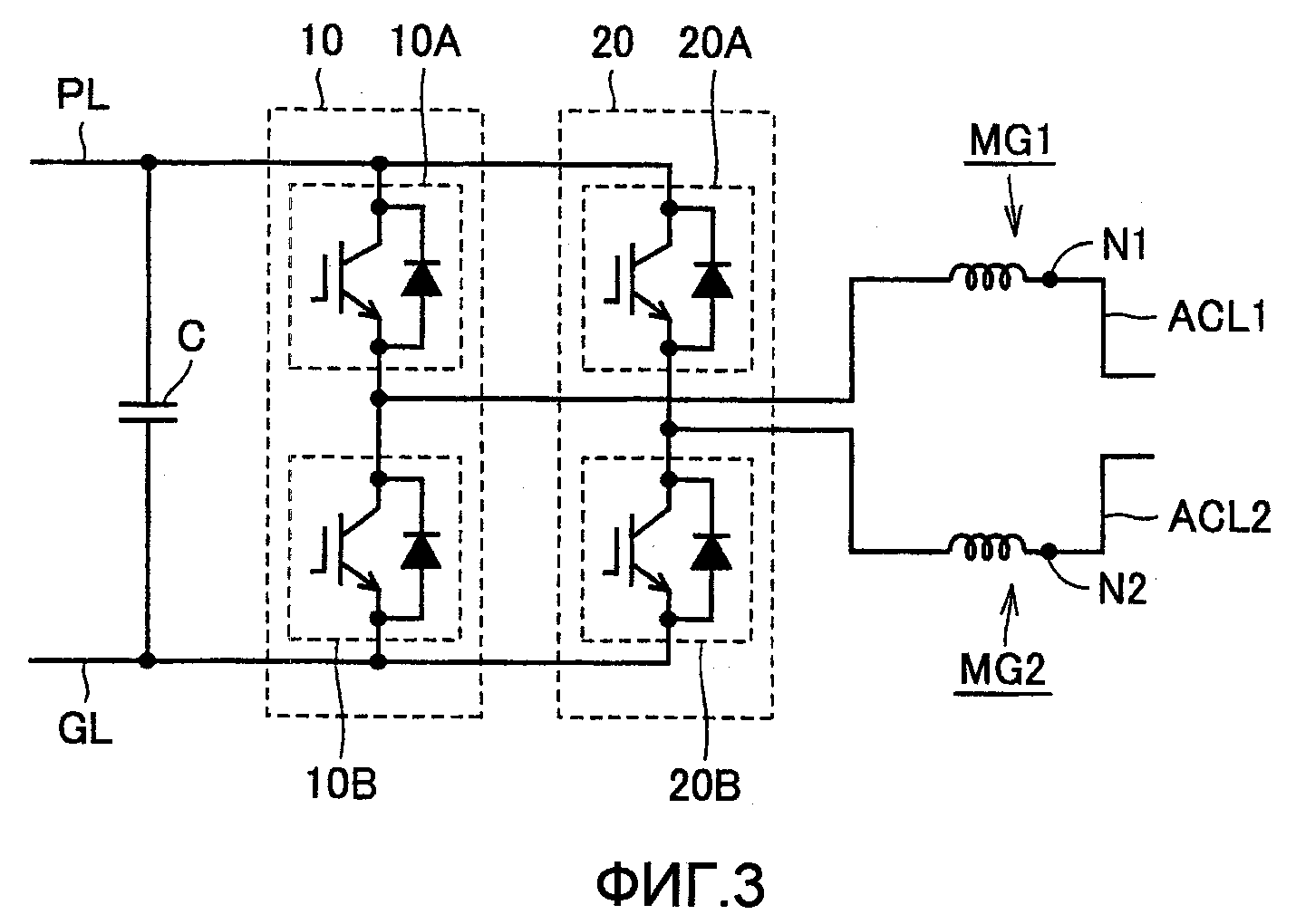
Фиг.3 - принципиальная нуль-фазовая эквивалентная схема инвертора и двигателя-генератора, показанного на фиг.1.
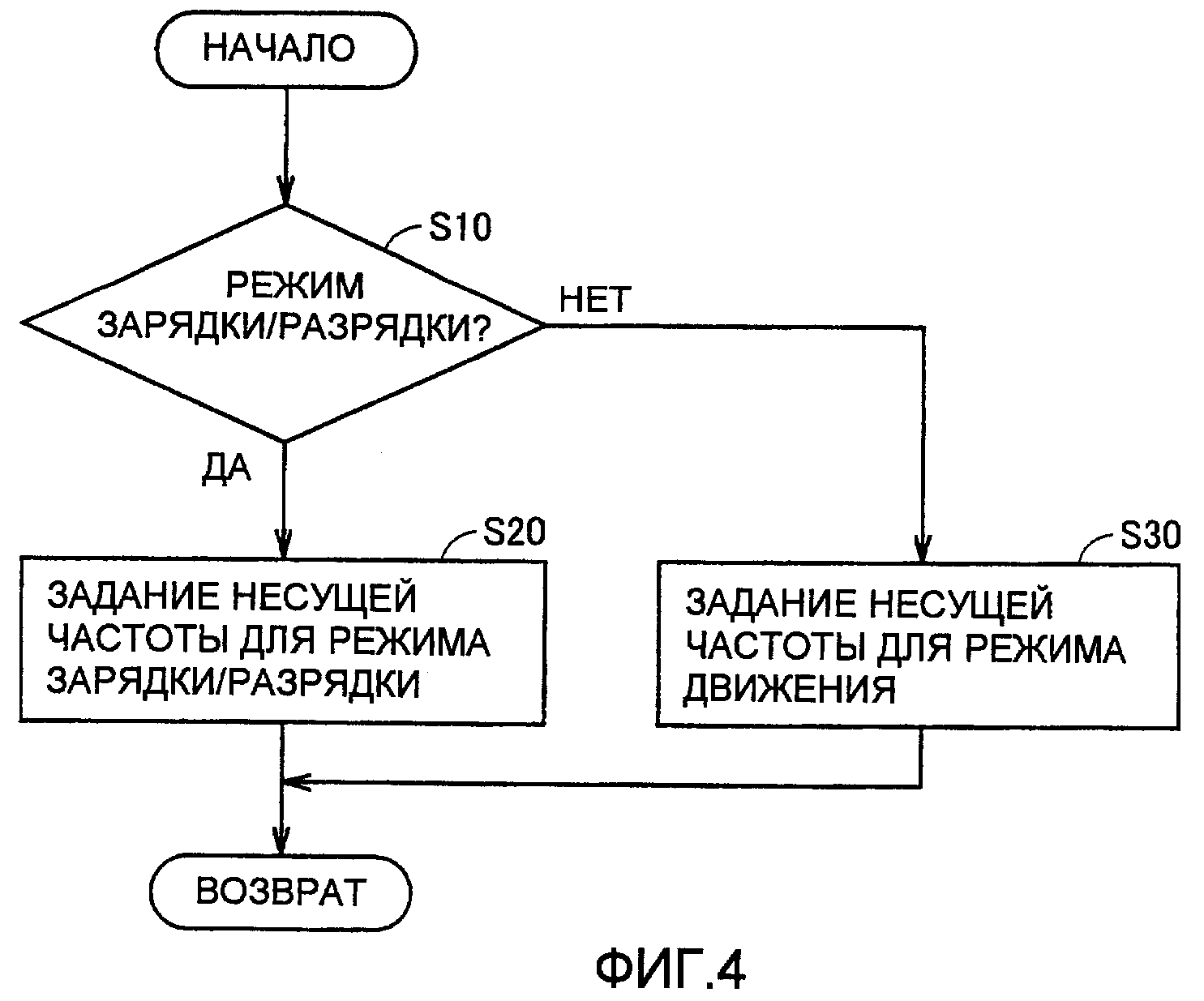
Фиг.4 - блок-схема последовательности операций способа задания несущей частоты посредством блока формирования сигнала несущей, показанного на фиг.2.
Фиг.5 - блок-схема последовательности операций способа задания несущей частоты в соответствии с первой модификацией первого варианта осуществления.
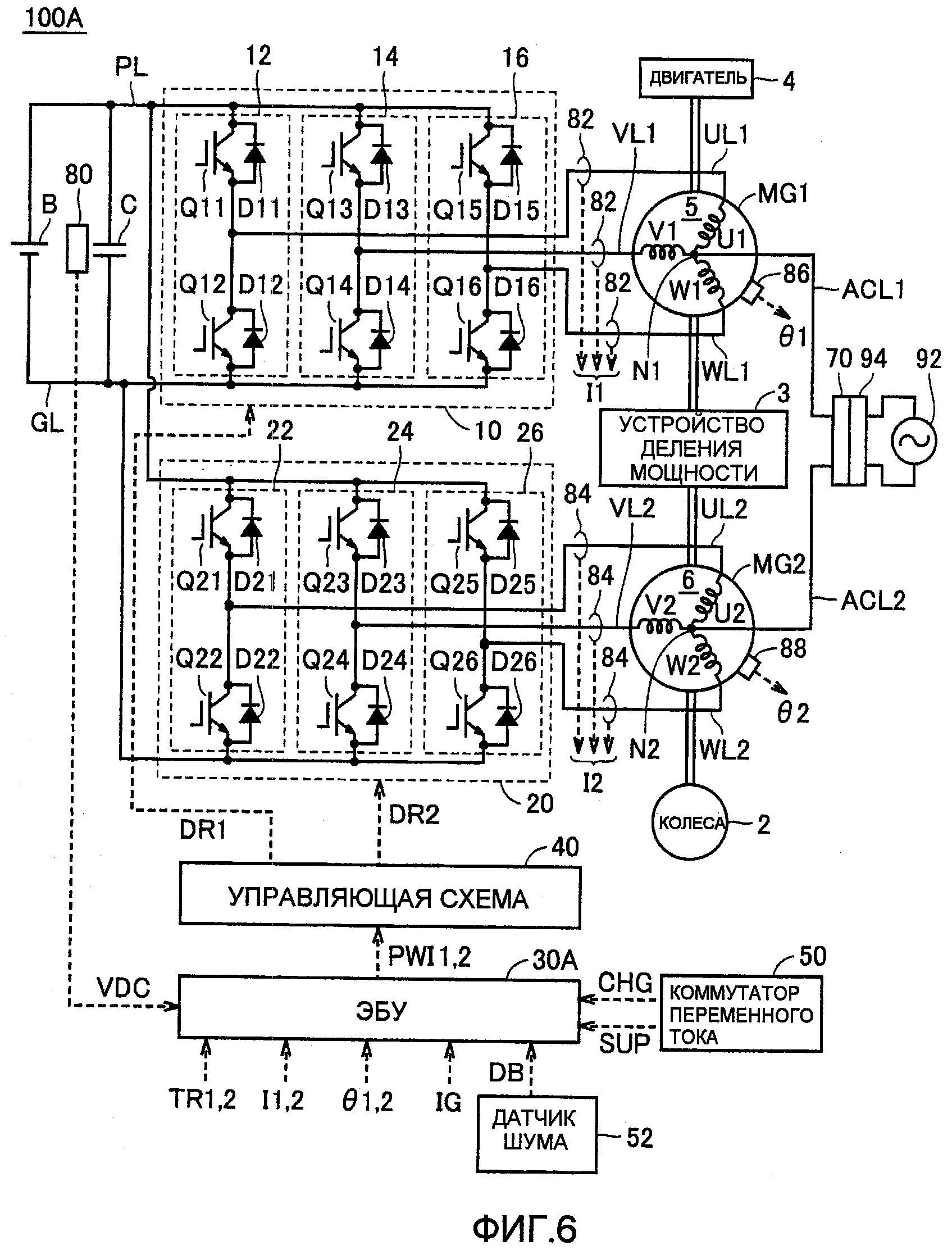
Фиг.6 - общая блок-схема гибридного транспортного средства в соответствии со второй модификацией первого варианта осуществления.
Фиг.7 - блок-схема последовательности операций способа задания несущей частоты в соответствии со второй модификацией первого варианта осуществления.
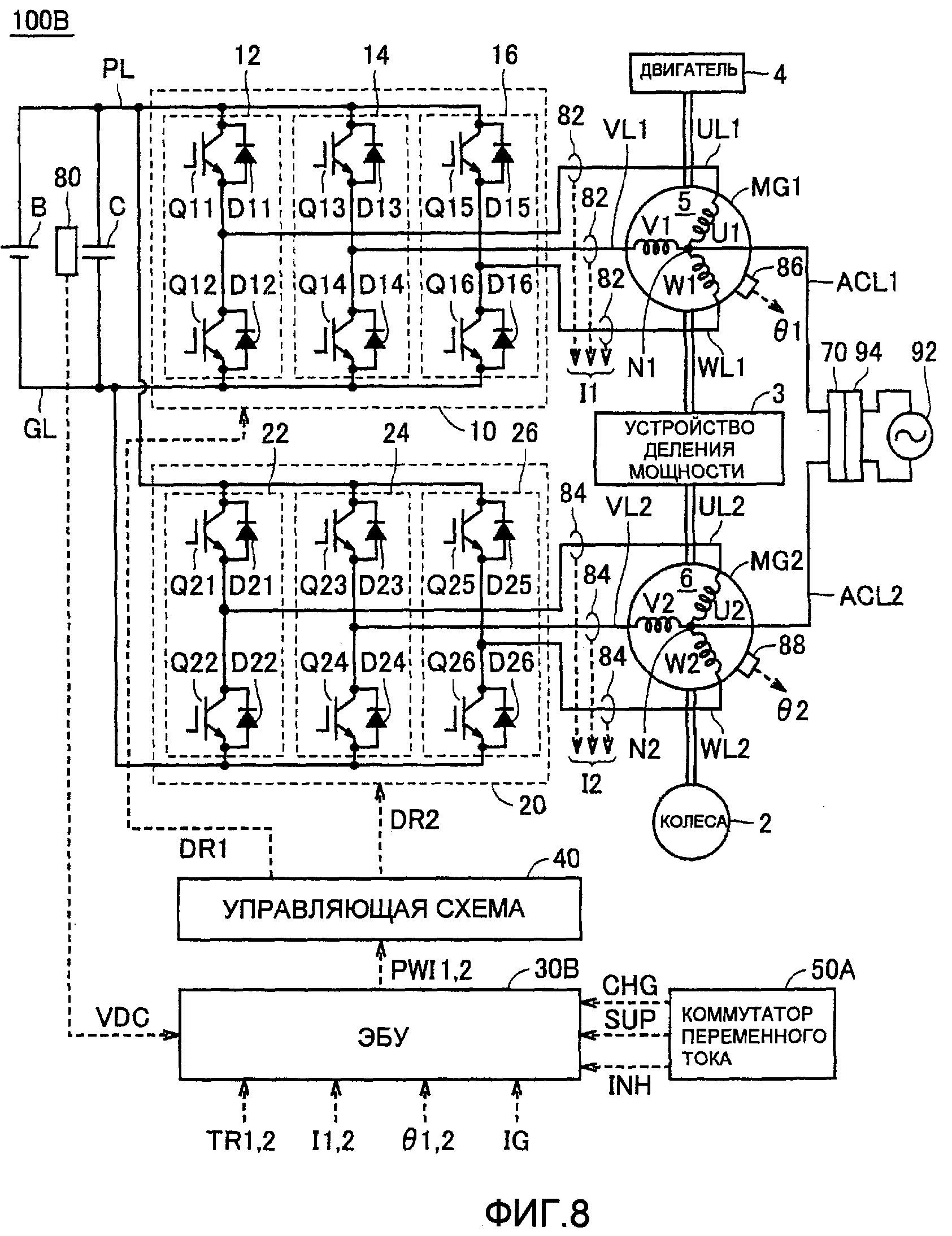
Фиг.8 - общая блок-схема гибридного транспортного средства в соответствии с третьей модификацией первого варианта осуществления.
Фиг.9 - блок-схема последовательности операций способа задания несущей частоты в соответствии с третьей модификацией первого варианта осуществления.
Фиг.10 - принципиальная схема управляющей схемы в соответствии со вторым вариантом осуществления.
Фиг.11 - общая блок-схема транспортного средства с электрическим приводом в соответствии с третьим вариантом осуществления.
Наилучший способ осуществления изобретения
Далее подробно описываются варианты осуществления настоящего изобретения со ссылками на чертежи. На чертежах одинаковые или соответствующие части обозначаются одинаковыми ссылочными позициями, и их описание не повторяется.
Первый вариант осуществления изобретения
Фиг.1 является общей блок-схемой гибридного транспортного средства, показанного в качестве примера транспортного средства с электрическим приводом в соответствии с настоящим изобретением. Согласно фиг.1 гибридное транспортное средство 100 включает в себя двигатель 4, электродвигатели-генераторы MG1 и MG2, устройства 3 деления мощности и колеса 2. Гибридное транспортное средство 100 дополнительно включает в себя устройство B накопления электроэнергии, инверторы 10 и 20, ЭБУ (электронный блок управления) 30, управляющую схему 40 и коммутатор 50 переменного тока.
Гибридное транспортное средство 100 дополнительно включает в себя силовую линию PL, линию GL заземления, конденсатор C, линии UL1 и UL2 U-фазы, линии VL1 и VL2 V-фазы, линии WL1 и WL2 W-фазы, датчик 80 напряжения, датчики 82 и 84 тока и датчики 86 и 88 угла вращения. Дополнительно гибридное транспортное средство 100 включает в себя силовые линии ACL1 и ACL2 и разъем 70.
Гибридное транспортное средство 100 работает с помощью двигателя 4 и электродвигателя-генератора MG2 в качестве источников питания. Устройство 3 деления мощности соединено с двигателем 4 и электродвигателями-генераторами MG1 и MG2 и распределяет мощность между ними. В качестве примера, планетарная передача, имеющая три вала вращения солнечной шестерни, водило планетарной передачи и коронную шестерню, может быть использована в качестве устройства 3 деления мощности. Эти три вала вращения соответственно соединены с соответствующими валами вращения двигателя 4 и электродвигателей-генераторов MG1 и MG2. Например, можно механически соединять двигатель 4 и электродвигатели-генераторы MG1 и MG2 с устройством 3 деления мощности посредством выполнения ротора электродвигателя-генератора MG1 полым и пропускания коленвала двигателя 4 через его центр.
Вал вращения электродвигателя-генератора MG2 соединен с колесом 2 посредством редуктора или дифференциальной передачи (не показано). Дополнительно механизм редуктора для вала вращения электродвигателя-генератора MG2 дополнительно может содержаться внутри устройства 3 деления мощности.
Электродвигатель-генератор MG1 содержится в гибридном транспортном средстве 100, работая как генератор, возбуждаемый посредством двигателя 4, и как электродвигатель, который может запускать работу двигателя 4. Электродвигатель-генератор MG2 содержится в гибридном транспортном средстве 100 в качестве приводимого двигателем колеса 2.
Как подробнее описано ниже, гибридное транспортное средство 100 обеспечивает подачу и прием электроэнергии в и из источника 92 питания энергосистемы общего пользования, подключенной посредством разъема 94 к разъему 70.
Положительный электрод и отрицательный электрод устройства B накопления электроэнергии подключены к силовой линии PL и линии GL заземления соответственно. Конденсатор C подключен между силовой линией PL и линией GL заземления. Инвертор 10 включает в себя плечо 12 U-фазы, плечо 14 V-фазы и плечо 16 W-фазы. Плечо 12 U-фазы, плечо 14 V-фазы и плечо 16 W-фазы подключены параллельно между силовой линией PL и линией GL заземления. Плечо 12 U-фазы включает в себя подключенные последовательно силовые транзисторы Q11 и Q12, плечо 14 V-фазы включает в себя подключенные последовательно силовые транзисторы Q13 и Q14, а плечо 16 W-фазы включает в себя подключенные последовательно силовые транзисторы Q15 и Q16. К силовым транзисторам Q11-Q16 встречно-параллельно подключены диоды D11-D16.
В качестве вышеописанных силовых транзисторов может использоваться IGBT (биполярный транзистор с изолированным затвором). Дополнительно вместо силового транзистора может использоваться силовой коммутирующий элемент в качестве силового MOSFET (полевого МОП (металл-оксид-полупроводник)-транзистора).
Электродвигатель-генератор MG1 включает в себя трехфазную катушку 5 в качестве статорной катушки. Катушка U1 U-фазы, катушка V1 V-фазы и катушка W1 W-фазы, формирующие трехфазную катушку 5, имеют один конец, соединенный вместе, чтобы сформировать нейтральную точку N1, и катушка U1 U-фазы, катушка V1 V-фазы и катушка W1 W-фазы имеют другой конец, подключенный к узлам между верхним и нижним плечом для плеча 12 U-фазы, плеча 14 V-фазы и плеча 16 W-фазы инвертора 10 соответственно.
Инвертор 20 включает в себя плечо 22 U-фазы, плечо 24 V-фазы и плечо 26 W-фазы. Электродвигатель-генератор MG2 включает в себя трехфазную катушку 6 в качестве статорной катушки. Инвертор 20 и электродвигатель-генератор MG2 имеют такую же структуру, что и инвертор 10 и электродвигатель-генератор MG1 соответственно.
К нейтральной точке N1 трехфазной катушки 5 подключен один конец силовой линии ACL1, а другой конец силовой линии ACL1 подключен к разъему 70. К нейтральной точке N2 трехфазной катушки 6 подключен один конец силовой линии ACL2, а другой конец силовой линии ACL2 подключен к разъему 70.
Устройство B накопления электроэнергии представляет собой перезаряжаемый источник энергии постоянного тока, такой как никель-гидридная или литиево-ионная аккумуляторная батарея. Устройство B накопления электроэнергии подает электроэнергию в инвертор 10/20 и заряжается посредством инвертора 10 и/или 20. Следует отметить, что конденсатор большой емкости может быть использован в качестве устройства B накопления электроэнергии.
Конденсатор C сглаживает колебания напряжения между силовой линией PL и линией GL заземления. Датчик 80 напряжения обнаруживает напряжение между клеммами конденсатора C, т.е. напряжение VDC силовой линии PL до линии GL заземления, и выводит обнаруженное напряжение VDC в ЭБУ 30.
В соответствии с управляющим сигналом DR1 от управляющей схемы 40 инвертор 10 преобразует напряжение постоянного тока, принимаемое от устройства B накопления электроэнергии, в трехфазное напряжение переменного тока и выводит преобразованное трехфазное напряжение переменного тока в электродвигатель-генератор MG1. Дополнительно в соответствии с управляющим сигналом DR1 от управляющей схемы 40 инвертор 10 преобразует трехфазное напряжение переменного тока, генерируемое посредством электродвигателя-генератора MG1, принимающего мощность от двигателя 4, в напряжение постоянного тока и выводит преобразованное напряжение постоянного тока в силовую линию PL.
В соответствии с управляющим сигналом DR2 от управляющей схемы 40 инвертор 20 преобразует напряжение постоянного тока от устройства B накопления электроэнергии в трехфазное напряжение переменного тока и выводит преобразованное трехфазное напряжение переменного тока в электродвигатель-генератор MG2. Дополнительно при рекуперативном торможении транспортного средства инвертор 20 преобразует трехфазное напряжение переменного тока, генерируемое посредством электродвигателя-генератора MG2, принимающего вращающую силу от колес 2, в напряжение постоянного тока в соответствии с управляющим сигналом DR2 из управляющей схемы 40 и выводит преобразованное напряжение постоянного тока в силовую линию PL.
Здесь электроэнергия переменного тока прикладывается из источника 92 питания энергосистемы общего пользования, подключенного к разъему 70 посредством разъема 94, через силовые линии ACL1 и ACL2 к нейтралям N1 и N2, инверторы 10 и 20 преобразуют электроэнергию переменного тока, вводимую из нейтральных точек N1 и N2, в электроэнергию постоянного тока и выводят электроэнергию в силовую линию PL, чтобы зарядить устройство B накопления электроэнергии. Когда подача электроэнергии из устройства B накопления электроэнергии в источник 92 питания энергосистемы общего пользования, подключенный к разъему 70 посредством разъема 94, запрошена, инверторы 10 и 20 формируют напряжение переменного тока энергосистемы общего пользования в нейтралях N1 и N2, и электроэнергия выводится из нейтральных точек N1, N2 через силовые линии ACL1 и ACL2 в источник 92 питания энергосистемы общего пользования.
Каждый из электродвигателей-генераторов MG1 и MG2 является трехфазной вращающейся электрической машиной переменного тока, реализованной, например, посредством трехфазного синхронного электродвигателя-генератора переменного тока. Электродвигатель-генератор MG1 приводится для рекуперации посредством инвертора 10 и выводит трехфазное напряжение переменного тока, генерируемое с помощью мощности двигателя 4, в инвертор 10. Дополнительно электродвигатель-генератор MG1 приводится для распространения мощности посредством инвертора 10 при пуске двигателя 4, добиваясь проворачивания коленвала двигателя 4. Электродвигатель-генератор MG2 приводится для распространения мощности посредством инвертора 20 и генерирует мощность для ведущего колеса 2. Дополнительно во время рекуперативного торможения транспортного средства электродвигатель-генератор MG2 приводится для рекуперации посредством инвертора 20 и выводит трехфазное напряжение переменного тока, генерируемое с помощью вращательной мощности, принимаемой от колеса 2, в инвертор 20.
Датчик 82 тока определяет ток I1 электродвигателя, протекающий через катушки соответствующих фаз электродвигателя-генератора MG1, и выводит его в ЭБУ 30. Датчик 86 угла вращения обнаруживает угол θ1 вращения ротора электродвигателя-генератора MG1 и выводит его в ЭБУ 30. Датчик 84 тока обнаруживает ток I2 электродвигателя, протекающий через катушки соответствующих фаз электродвигателя-генератора MG2, и выводит его в ЭБУ 30. Датчик 88 угла вращения обнаруживает угол θ2 вращения ротора электродвигателя-генератора MG2 и выводит его в ЭБУ 30.
ЭБУ 30 формирует сигналы PWI1 и PWI2 для управления инверторами 10 и 20 соответственно и выводит сформированные сигналы PWI1 и PWI2 в управляющую схему 40.
Когда разъем 94 источника 92 питания энергосистемы общего пользования подключен к разъему 70 и зарядка устройства B накопления электроэнергии от источника 92 питания энергосистемы общего пользования запрошена на основе сигнала CHG запроса зарядки от коммутатора 50 переменного тока, ЭБУ 30 управляет инверторами 10 и 20 таким образом, что электроэнергия переменного тока, применяемая от источника 92 питания энергосистемы общего пользования к нейтралям N1 и N2, преобразуется в электроэнергию постоянного тока для зарядки устройства B накопления электроэнергии.
Более конкретно, ЭБУ 30 использует трехфазные катушки 5 и 6 электродвигателей-генераторов MG1 и MG2 в качестве реакторов и управляет инверторами 10 и 20 таким образом, чтобы инверторы 10 и 20 выступали в качестве плеч однофазного конвертора, преобразуя электроэнергию переменного тока из источника 92 питания энергосистемы общего пользования, вводимую через нейтральные точки N1 и N2, в электроэнергию постоянного тока, посредством чего напряжение, прикладываемое из источника 92 питания энергосистемы общего пользования, повышается.
Когда разъем 94 источника 92 питания энергосистемы общего пользования подключен к разъему 70 и подача электроэнергии из устройства B накопления электроэнергии в источник 92 питания энергосистемы общего пользования запрошена на основе сигнала SUP запроса подачи от коммутатора 50 переменного тока, ЭБУ 30 управляет инверторами 10 и 20 таким образом, что электроэнергия постоянного тока из устройства B накопления электроэнергии преобразуется в электроэнергию переменного тока и выводится из нейтралей N1 и N2 в источник 92 питания энергосистемы общего пользования.
Более конкретно, ЭБУ 30 управляет инверторами 10 и 20 таким образом, чтобы инверторы 10 и 20 выступали в качестве плеч однофазного инвертора, преобразуя электроэнергию постоянного тока из устройства B накопления электроэнергии в электроэнергию переменного тока, которая должна быть выведена из нейтральных точек N1 и N2.
Управляющая схема 40 принимает сигналы PWI1 и PWI2 от ЭБУ 30. Далее управляющая схема 40 формирует управляющий сигнал DR1 для фактического включения/отключения силовых транзисторов Q11-Q16 инвертора 10 на основе сигнала PWI1 и выводит сформированный управляющий сигнал DR1 в электроды затвора силовых транзисторов Q11-Q16. Дополнительно управляющая схема 40 формирует управляющий сигнал DR2 для фактического включения/отключения силовых транзисторов Q21-Q26 инвертора 20 на основе сигнала PWI2 и выводит сформированный управляющий сигнал DR2 в электроды затвора силовых транзисторов Q21-Q26.
Коммутатор 50 переменного тока представляет собой устройство ввода, позволяющее пользователю инструктировать зарядку устройства B накопления электроэнергии от источника 92 питания энергосистемы общего пользования или подачу электроэнергии из устройства B накопления электроэнергии в источник 92 питания энергосистемы общего пользования. Когда проинструктирована зарядка устройства B накопления электроэнергии от источника 92 питания энергосистемы общего пользования, коммутатор 50 переменного тока активирует сигнал CHG запроса зарядки, чтобы вывести его в ЭБУ 30. Когда проинструктирована подача электроэнергии от устройства B накопления электроэнергии в источник 92 питания энергосистемы общего пользования, коммутатор 50 переменного тока активирует сигнал SUP запроса подачи, чтобы вывести его в ЭБУ 30. Коммутатор 50 переменного тока реализуется посредством сенсорной панели, нажимной кнопки и т.п.
Фиг.2 является функциональной блок-схемой ЭБУ 30, показанного на фиг.1. Согласно фиг.2 ЭБУ 30 включает в себя блоки 32 и 34 управления инверторами, блок 36 координированного управления и блок 38 формирования сигнала несущей.
Блок 32 управления инвертором формирует сигнал PWM (широтно-импульсной модуляции) для включения/отключения силовых транзисторов Q11-Q16 инвертора 10 на основе команды TR1 крутящего момента, тока I1 электродвигателя и угла θ1 вращения электродвигателя-генератора MG1, напряжения VDC из датчика 80 напряжения и сигнала FC1 несущей из блока 38 формирования сигналов несущей и выводит сформированный PWM-сигнал в качестве сигнала PWI1 в управляющую схему 40.
Блок 34 управления инвертором формирует сигнал PWM для включения/отключения силовых транзисторов Q21-Q26 инвертора 20 на основе команды TR2 крутящего момента, тока I2 электродвигателя и угла θ2 вращения электродвигателя-генератора MG2, напряжения VDC и сигнала FC2 несущей из блока 38 формирования сигналов несущей и выводит сформированный PWM-сигнал в качестве сигнала PWI2 в управляющую схему 40.
Блоки 32 и 34 управления инвертором формируют сигналы PWI1 и PWI2 так, что когда управляющий сигнал CTL1 от блока 36 координированного управления активирован, электроэнергия переменного тока, применяемая из источника 92 питания энергосистемы общего пользования к нейтралям N1 и N2, преобразуется в электроэнергию постоянного тока, с помощью которой устройство B накопления электроэнергии заряжается, и выводят сформированные сигналы PWM1 и PWM2 в управляющую схему 40.
Дополнительно блоки 32 и 34 управления инвертором формируют сигналы PWI1 и PWI2 так, что когда управляющий сигнал CTL2 от блока 36 координированного управления активируется, напряжение переменного тока из энергосистемы общего пользования, которое должно быть выведено в источник 92 питания энергосистемы общего пользования, формируется в нейтралях N1 м N2, и выводят сформированные сигналы PWM1 и PWM2 в управляющую схему 40.
Когда сигнал IG зажигания неактивен и сигнал CHG запроса зарядки от коммутатора 50 переменного тока активен, блок 36 координированного управления активирует управляющий сигнал CTL1, который должен быть выведен в блоки 32 и 34 управления инвертором. Дополнительно, когда сигнал IG зажигания неактивен, а сигнал SUP запроса подачи из коммутатора 50 переменного тока активен, блок 36 координированного управления активирует сигнал CTL2, который должен быть выведен в блоки 32 и 34 управления инвертором. Сигнал IG зажигания изменяется в зависимости от положения ключа зажигания, и деактивированный сигнал IG зажигания указывает то, что ключ зажигания находится в положении отключения.
Дополнительно, когда сигнал CHG запроса зарядки или сигнал SUP запроса подачи активируется в то время, когда сигнал IG зажигания неактивен, сигнал 36 координированного управления активирует сигнал MD режима, который должен быть выведен в блок 38 формирования сигнала несущей. В частности, сигнал MD режима представляет рабочий режим инверторов 10 и 20. Неактивный сигнал MD режима представляет то, что работа осуществляется в режиме движения (обычном режиме), а активный сигнал MD режима представляет то, что работа осуществляется в режиме зарядки/разрядки (состоянии, в котором подача и прием электроэнергии возможны между устройством B накопления электроэнергии и источником 92 питания энергосистемы общего пользования).
Когда сигнал MD режима из блока 36 координированного управления является неактивным, блок 38 формирования сигналов несущей задает несущие частоты сигналов FC1 и FC2 несущих равными частотам fd1 и fd2 для режима движения соответственно. Дополнительно, когда сигнал MD режима из блока 36 координированного управления активен, блок 38 формирования сигналов несущей задает несущие частоты каждого из сигналов FC1 и FC2 несущей равными частоте fc для режима зарядки/разрядки.
Далее блок 38 формирования сигналов несущей формирует сигналы FC1 и FC2 несущей, имеющие заданные несущие частоты, и выводит сформированные сигналы FC1 и FC2 несущей в блоки 32 и 34 управления инверторами соответственно.
Несущие частоты fd1 и fd2 для режима движения определяются с учетом потерь переключения при коммутации силовых транзисторов Q11-Q16 и Q21-Q26, и, в общем, они находятся в слышимом диапазоне (например, от нескольких до 10 кГц). Несущая частота fc для режима зарядки/разрядки задается более высокой, чем несущие частоты fd1 и fd2 для режима движения, чтобы снизить электромагнитный шум инверторов 10 и 20. В качестве примера, несущая частота fc задается равной значению выше 15 кГц и, предпочтительно, в неслышимом диапазоне (20 кГц или выше).
Когда несущая частота повышается, потери переключения транзистора также возрастают. Тем не менее, в режиме зарядки/разрядки ток, протекающий в инверторы 10 и 20, имеет порядок величины меньше, чем в режиме движения. Следовательно, повышение потерь переключения не представляет проблемы.
Фиг.3 представляет принципиальную нуль-фазовую эквивалентную схему инверторов 10 и 20 и электродвигателей-генераторов MG1 и MG2, показанных на фиг.1. В каждом из инверторов 10 и 20 в качестве трехфазных инверторов предусмотрено восемь различных шаблонов для комбинирования включения/выключения шести транзисторов. Из восьми шаблонов коммутации два имеют нулевое межфазное напряжение, и это состояние напряжения упоминается как нулевой вектор напряжения. Для нулевого вектора напряжения три транзистора верхнего плеча могут рассматриваться как в одном состоянии коммутации (все включены или все отключены), и три транзистора нижнего плеча могут рассматриваться как в одном состоянии коммутации. Следовательно, на фиг.3 три транзистора верхнего плеча инвертора 10 совместно представляются как верхнее плечо 10A, а три транзистора нижнего плеча инвертора 10 совместно представляются как нижнее плечо 10B. Следовательно, на фиг.3 три транзистора верхнего плеча инвертора 20 совместно представляются как верхнее плечо 20A, а три транзистора нижнего плеча инвертора 20 совместно представляются как нижнее плечо 20B.
Как показано на фиг.3, нуль-фазовая эквивалентная схема может рассматриваться как однофазный PWM-конвертор, который принимает в качестве ввода однофазную электроэнергию переменного тока энергосистемы общего пользования, применяемую к нейтралям N1 и N2 через силовые линии ACL1 и ACL2. Дополнительно нуль-фазовая эквивалентная схема может рассматриваться как однофазный PWM-конвертор, который формирует однофазное напряжение переменного тока для нейтральных точек N1 и N2 с помощью напряжения постоянного тока, подаваемого из силовой линии PL. Следовательно, посредством изменения нулевого вектора напряжения в каждом из инверторов 10 и 20 и тем самым коммутации управления инверторов 10 и 20 таким образом, чтобы инверторы работали как плечи (ветви) соответствующих фаз однофазного PWM-преобразователя однофазного PWM-инвертора, можно преобразовать напряжение переменного тока энергосистемы общего пользования, вводимое с разъема 70, в напряжение постоянного тока и выводить его в силовую линию PL, и можно преобразовывать напряжение постоянного тока из силовой линии PL в напряжение переменного тока и выводить его через разъем 70.
Фиг.4 является блок-схемой последовательности операций способа задания несущей частоты посредством блока 38 формирования сигнала несущей, показанного на фиг.2. Согласно фиг.4 блок 38 формирования сигнала несущей определяет на основе сигнала MD режима от блока 36 координированного управления то, является или нет режим работы инверторов 10 и 20 режимом зарядки/разрядки (этап S10).
Если определено, что режим работы является режимом зарядки/разрядки (ДА на этапе S10), блок 38 формирования сигнала несущей задает несущую частоту каждого из сигналов FC1 и FC2 несущей равной частоте fc для режима зарядки/разрядки (этап S20).
Если на этапе S10 определено, что режим работы не является режимом зарядки/разрядки (НЕТ на этапе S10), блок 38 формирования сигнала несущей задает несущие частоты сигналов FC1 и FC2 несущей равными частотам fd1 и fd2 для режима движения соответственно (этап S30).
Первая модификация первого варианта осуществления изобретения
В первой модификации несущая частота fc для режима зарядки/разрядки задается только поздней ночью, когда шум особенно мешает.
Фиг.5 является блок-схемой последовательности операций способа задания несущей частоты в соответствии с первой модификацией первого варианта осуществления. Согласно фиг.5 блок-схема последовательности операций способа включает в себя, в дополнение к блок-схеме последовательности операций способа по фиг.4, этап S12. В частности, если определено на этапе S10, что работа осуществляется в режиме зарядки/разрядки, блок 38 формирования сигналов несущей определяет, выполняется ли это в заранее заданное время поздней ночью (например, с 22:00 до 6:00) или нет (этап S12).
Если определено, что время является поздней ночью (ДА на этапе S12), управление переходит к этапу S20, на котором блок 38 формирования сигналов несущей задает несущую частоту каждого из сигналов FC1 и FC2 несущей равной частоте fc для режима зарядки/разрядки.
Если на этапе S12 определено, что время не является поздней ночью (НЕТ на этапе S12), управление переходит к этапу S30, на котором блок 38 формирования сигналов несущей задает несущие частоты сигналов FC1 и FC2 несущей равными частотам fd1 и fd2 для режима движения соответственно.
Вторая модификация первого варианта осуществления изобретения
Во второй модификации шум вокруг транспортного средства обнаруживается, и несущая частота fc для режима зарядки/разрядки задается только тогда, когда шум вокруг транспортного средства низкий.
Фиг.6 является общей блок-схемой гибридного транспортного средства в соответствии со второй модификацией первого варианта осуществления. Согласно фиг.6 гибридное транспортное средство 100A включает в себя, в дополнение к конфигурации гибридного транспортного средства 100, показанной на фиг.1, датчик 52 шума и включает в себя, вместо ЭБУ 30, ЭБУ 30A.
Датчик 52 шума обнаруживает уровень шума вокруг гибридного транспортного средства 100A и выводит сигнал DB, который изменяется в соответствии с обнаруженным уровнем шума, в ЭБУ 30A.
ЭБУ 30A определяет режим работы (режим движения, режим зарядки/разрядки) инверторов 10 и 20 на основе сигнала IG зажигания и сигнала CHG запроса зарядки и сигнала SUP запроса подачи от коммутатора 50 переменного тока и на основе определенного режима работы и сигнала DB из датчика 52 шума определяет несущую частоту сигнала несущей для формирования сигналов PWI1 и PWI2 способом, который описан ниже.
Другие функции ЭБУ 30A являются такими же, что и для ЭБУ 30 в соответствии с первым вариантом осуществления. Дополнительно другие конфигурации гибридного транспортного средства 100A являются такими же, что и для гибридного транспортного средства 100 в соответствии с первым вариантом осуществления.
Фиг.7 является блок-схемой последовательности операций способа задания несущей частоты в соответствии со второй модификацией первого варианта осуществления. Согласно фиг.7 блок-схема последовательности операций способа включает в себя, в дополнение к блок-схеме последовательности операций способа по фиг.4, этап S14. В частности, если определено на этапе S10, что работа осуществляется в режиме зарядки/разрядки, блок 38 формирования сигналов несущей определяет то, является или нет шум вокруг транспортного средства ниже заранее заданного опорного значения на основе сигнала DB из датчика 52 шума (этап S14).
Если определено, что шум вокруг транспортного средства ниже опорного значения (ДА на этапе S14), управление переходит к этапу S20, на котором блок 38 формирования сигналов несущей задает несущую частоту каждого из сигналов FC1 и FC2 несущей равной частоте fc для режима зарядки/разрядки.
Если на этапе S14 определено, что шум вокруг транспортного средства не ниже опорного значения (НЕТ на этапе S14), управление переходит к этапу S30, на котором блок 38 формирования сигналов несущей задает несущие частоты сигналов FC1 и FC2 несущей равными частотам fd1 и fd2 для режима движения соответственно.
Третья модификация первого варианта осуществления изобретения
Третья модификация позволяет пользователю выбирать то, должна ли несущая частота быть переключена с частоты для режима движения на частоту для режима зарядки/разрядки, в режиме зарядки/разрядки.
Фиг.8 является общей блок-схемой гибридного транспортного средства в соответствии с третьей модификацией первого варианта осуществления. Согласно фиг.8 гибридное транспортное средство 100B включает в себя, в конфигурации гибридного транспортного средства 100, показанной на фиг.1, коммутатор 50A переменного тока и ЭБУ 30B вместо коммутатора 50 переменного тока и ЭБУ 30 соответственно.
В режиме зарядки/разрядки, когда пользователь выполняет команду запретить переключение несущей частоты инверторов 10 и 20 с частот fd1 и fd2 для режима движения на частоту fc для режима зарядки/разрядки, коммутатор 50A переменного тока выводит сигнал INH уровня H (логического высокого) в ЭБУ 30B.
Другие функции коммутатора 50A переменного тока являются такими же, что и функции коммутатора 50 переменного тока в соответствии с первым вариантом осуществления.
ЭБУ 30B определяет режим работы (режим движения, режим зарядки/разрядки) транспортного средства на основе сигнала IG зажигания и сигнала CHG запроса зарядки и сигнала SUP запроса подачи от коммутатора 50A переменного тока и на основе определенного режима работы определяет несущую частоту сигнала несущей для формирования сигналов PWI1 и PWI2.
При этом до тех пор пока сигнал INH от коммутатора 50A переменного тока находится на уровне H, ЭБУ 30B задает несущие частоты инверторов 10 и 20 равными fd1 и fd2 для режима движения, даже если режимом работы инверторов 10 и 20 является режим зарядки/разрядки. Другими словами, пока сигнал INH находится на уровне H, ЭБУ 30B запрещает переключение несущих частот с частот fd1 и fd2 для режима движения на частоту fc для режима зарядки/разрядки.
Другие функции ЭБУ 30B являются такими же, что и для ЭБУ 30 в соответствии с первым вариантом осуществления. Дополнительно другие конфигурации гибридного транспортного средства 100B являются такими же, что и для гибридного транспортного средства 100 в соответствии с первым вариантом осуществления.
Фиг.9 является блок-схемой последовательности операций способа задания несущей частоты в соответствии с третьей модификацией первого варианта осуществления. Согласно фиг.9 блок-схема последовательности операций способа включает в себя, в дополнение к блок-схеме последовательности операций способа по фиг.4, этап S16. В частности, если определено на этапе S10, что работа осуществляется в режиме зарядки/разрядки, блок 38 формирования сигналов несущей определяет, находится сигнал INH от коммутатора 50A переменного тока на уровне H или нет (этап S16).
Если определено, что сигнал INH находится на уровне L (логическом низком) (НЕТ на этапе S16), управление переходит к этапу S20, на котором блок 38 формирования сигналов несущей задает несущую частоту каждого из сигналов FC1 и FC2 несущей равной частоте fc для режима зарядки/разрядки.
Если на этапе S16 определено, что сигнал INH находится на уровне H (НЕТ на этапе S16), управление переходит к этапу S30, на котором блок 38 формирования сигналов несущей задает несущие частоты сигналов FC1 и FC2 несущей равными частотам fd1 и fd2 для режима движения соответственно.
Как описано выше, в первом варианте осуществления и каждой из его модификаций ЭБУ 30, 30A и 30B коммутируют несущие частоты инверторов 10 и 20 с частот fd1 и fd2 для режима движения на частоту fc (>fd1, fd2) для режима зарядки/разрядки в режиме зарядки/разрядки. Следовательно, электромагнитный шум, формируемый от инверторов 10 и 20, может быть уменьшен. Следовательно, согласно первому варианту осуществления и его модификациям можно уменьшать шум, когда электроэнергия подается и принимается между источником 92 питания энергосистемы общего пользования и устройством B накопления электроэнергии.
Второй вариант осуществления изобретения
Во втором варианте осуществления скорость переключения силовых транзисторов Q11-Q16 и Q21-Q26, включенных в инверторы 10 и 20, уменьшается в режиме зарядки/разрядки. Следовательно, уменьшается выброс напряжения, формируемый при коммутации, и, следовательно, уменьшается шум в источнике 92 питания энергосистемы общего пользования, подключенном к разъему 70.
Общая конфигурация гибридного транспортного средства в соответствии со вторым вариантом осуществления такая же, как и для гибридного транспортного средства 100 в соответствии с первым вариантом осуществления, показанного на фиг.1.
Фиг.10 представляет собой принципиальную схему управляющей схемы 40 в соответствии со вторым вариантом осуществления. На фиг.10 схема включения/отключения силового транзистора Q11, включенного в инвертор 10, показана в качестве примера. Аналогичная схема предусмотрена также для каждого из силовых транзисторов Q12-Q16 и Q21-Q26.
Согласно фиг.10 управляющая схема 40 включает в себя инвертирующую схему IV1 и IV2, И-вентили AD1-AD4, npn-транзисторы NT1-NT4, резисторы RD и RC и узел VG подачи электроэнергии.
Инвертирующая схема IV1 инвертирует сигнал PWI1u из ЭБУ 30 (не показан, такой же далее) и выводит результат в И-вентили AD2 и AD4. Сигнал PWI1u представляет сигнал для возбуждения плеча 12 U-фазы инвертора 10 сигнала PWI1. Инвертирующая схема IV2 принимает сигнал MD режима, сформированный посредством блока 36 координированного управления (не показан) ЭБУ 30, инвертирует принимаемый сигнал MD режима и выводит результат в И-вентили AD1 и AD2.
И-вентиль AD1 выполняет И-операцию между сигналом PWI1u и выходным сигналом инвертирующей схемы IV2 и выводит результат операции в базу npn-транзистора NT1. И-вентиль AD2 выполняет И-операцию между выходными сигналами инвертирующих схем IV1 и IV2 и выводит результат операции в базу npn-транзистора NT2. И-вентиль AD3 выполняет И-операцию между сигналом PWI1u и сигналом MD режима и выводит результат операции в базу npn-транзистора NT3. И-вентиль AD4 выполняет И-операцию между выходным сигналом инвертирующей схемы IV1 и сигналом MD режима и выводит результат операции в базу npn-транзистора NT4.
Npn-транзисторы NT1 и NT2 подключены последовательно между узлом VG подачи питания и эмиттером силового транзистора Q11 и принимают в своих затворах выходные сигналы И-вентилей AD1 и AD2 соответственно. Npn-транзисторы NT3 и NT4 подключены последовательно между узлом VG подачи питания и эмиттером силового транзистора Q11 и принимают в своих затворах выходные сигналы И-вентилей AD3 и AD4 соответственно.
Резистор RD подключен между соединительным узлом npn-транзисторов NT1 и NT2 и затвором силового транзистора Q11. Резистор RC подключен между соединительным узлом npn-транзисторов NT3 и NT4 и затвором силового транзистора Q11. Здесь резистор RC имеет значение сопротивления, превышающее значение резистора RD.
В управляющей схеме 40, когда сигнал MD режима находится на уровне L, т.е. когда режим работы инверторов 10 и 20 представляет собой режим движения, И-вентили AD3 и AD4 являются деактивированными в то время, пока И-вентили AD1 и AD2 являются активированными. Таким образом, npn-транзисторы NT3 и NT4 поддерживаются отключенными в то время, когда npn-транзисторы NT1 и NT2 включаются/отключаются в соответствии с сигналом PWI1u. Следовательно, в режиме движения резистор RD используется в качестве сопротивления затвора силового транзистора Q11.
С другой стороны, если сигнал MD режима находится на уровне H, т.е. когда режим работы инверторов 10 и 20 представляет собой режим зарядки/разрядки, И-вентили AD3 и AD4 являются активированными в то время, пока И-вентили AD1 и AD2 являются деактивированными. Следовательно, npn-транзисторы NT1 и NT2 поддерживаются отключенными в то время, когда npn-транзисторы NT3 и NT4 включаются/отключаются в соответствии с сигналом PWI1u. Поэтому в режиме зарядки/разрядки резистор RC используется в качестве сопротивления затвора силового транзистора Q11.
В частности, в управляющей схеме 40 в режиме зарядки/разрядки используется более высокое сопротивление затвора, чем в режиме движения. Как результат, выброс напряжения, формируемый при операции включения/отключения каждого силового транзистора, может быть уменьшен, и шум в источнике 92 питания энергосистемы общего пользования, подающем и принимающем электроэнергию в и из инверторов 10 и 20, может быть снижен.
Когда сопротивление затвора транзистора повышается, потери переключения транзистора возрастают. Тем не менее, в режиме зарядки/разрядки ток, протекающий в инверторы 10 и 20, имеет порядок величины меньше, чем в режиме движения, и, следовательно, повышение потерь переключения не представляет проблемы.
Как описано выше, во втором варианте осуществления в режиме зарядки/разрядки сопротивление затвора управляющей схемы 40 коммутируется с резистора RD для режима движения на резистор RC (> резистора RD) для режима зарядки/разрядки, и поэтому выброс напряжения, ассоциативно связанный с операцией включения/отключения силовых транзисторов Q11-Q16 и Q21-Q26, возрастает. Следовательно, согласно второму варианту осуществления шум в источнике 92 питания энергосистемы общего пользования может быть уменьшен, когда электроэнергия подается и принимается между источником 92 питания энергосистемы общего пользования и устройством B накопления электроэнергии.
Третий вариант осуществления изобретения
Третий вариант осуществления показывает конфигурацию, в которой устройство B накопления электроэнергии заряжается от источника 92 питания энергосистемы общего пользования с помощью одного электродвигателя-генератора.
Фиг.11 является общей блок-схемой транспортного средства с электрическим приводом в соответствии с третьим вариантом осуществления. Согласно фиг.11 транспортное средство 100C с электрическим приводом включает в себя устройство B накопления электроэнергии, инвертор 20, электродвигатель-генератор MG2, колеса 2, ЭБУ 30C, управляющую схему 40 и коммутатор 50 переменного тока. Дополнительно транспортное средство 100C с электрическим приводом включает в себя силовую линию PL, линию GL заземления, конденсатор C, линию UL2 U-фазы, линию VL2 V-фазы, линию WL2 W-фазы, датчик 80 напряжения, датчик 84 тока и датчик 88 угла вращения.
Дополнительно транспортное средство 100C с электрическим приводом включает в себя выпрямляющую схему 28, силовые линии ACL2 и ACL3 и разъем 70.
Выпрямляющая схема 28 включает в себя диоды D31 и D32. Диод D31 имеет катод, подключенный к силовой линии PL, и анод, подключенный к катоду диода D32. Диод D32 имеет анод, подключенный к линии GL заземления. В соединительном узле один конец силовой линии ACL3 подключен между диодами D31 и D32, и другой конец силовой линии ACL3 подключен к разъему 70.
ЭБУ 30C формирует сигнал PWI2 для управления инвертором 20 и выводит сформированный сигнал PWI2 в управляющую схему 40.
Когда разъем 94 источника 92 питания энергосистемы общего пользования подключен к разъему 70 и зарядка устройства B накопления электроэнергии от источника 92 питания энергосистемы общего пользования запрошена на основе сигнала CHG запроса зарядки от коммутатора 50 переменного тока (в режиме зарядки/разрядки), ЭБУ 30C управляет инвертором 20 таким образом, что электроэнергия переменного тока от источника 92 питания энергосистемы общего пользования, применяемая к нейтральной точке N2, преобразуется в электроэнергию постоянного тока для зарядки устройства B накопления электроэнергии.
В это время ЭБУ 30C задает несущую частоту несущего сигнала FC2 для формирования сигнала PWI2 равной частоте fc (>fd2) для режима зарядки/разрядки.
Если режим работы не является режимом зарядки/разрядки (режим движения), ЭБУ 30C задает несущую частоту сигнала FC2 несущей равной частоте fd2 для режима движения.
Другие конфигурации транспортного средства 100C с электрическим приводом являются такими же, что и описанные со ссылкой на первый вариант осуществления.
Как описано выше, в третьем варианте осуществления также в режиме зарядки/разрядки несущая частота инвертора 20 переключается с частоты fd2 для режима движения на частоту fc (>fd2) для режима зарядки/разрядки, и, следовательно, электромагнитный шум, формируемый из инвертора 20, уменьшается. Следовательно, посредством третьего варианта осуществления также можно уменьшить шум, когда устройство B накопления электроэнергии заряжается от источника 92 питания энергосистемы общего пользования.
Хотя не показано конкретно, в качестве первой модификации третьего варианта осуществления аналогично первой модификации первого варианта осуществления несущая частота fc для режима зарядки/разрядки может задаваться только поздней ночью, когда шум особенно мешает.
Дополнительно в качестве второй модификации третьего варианта осуществления аналогично второй модификации первого варианта осуществления шум вокруг транспортного средства обнаруживается посредством датчика 52 шума, и несущая частота fc для режима зарядки/разрядки задается только тогда, когда шум вокруг транспортного средства низкий.
Дополнительно в качестве третьей модификации третьего варианта осуществления аналогично третьей модификации первого варианта осуществления может быть возможным позволять пользователю выбирать в режиме зарядки/разрядки то, должна ли несущая частота быть переключена с частоты для режима движения на частоту для режима зарядки/разрядки.
В качестве еще одного другого варианта осуществления в конфигурации (фиг.11), позволяющей зарядку устройства B накопления электроэнергии от источника 92 питания энергосистемы общего пользования с помощью одного электродвигателя-генератора, аналогично второму варианту осуществления, описанному выше, управляющая схема 40 может быть сформирована посредством схемы, показанной на фиг.10, и скорость переключения силовых транзисторов Q21-Q26, включенных в инвертор 20, может быть уменьшена в режиме зарядки. Это уменьшает выброс напряжения, формируемый при коммутации транзисторов, и, как результат, шум в источнике 92 питания энергосистемы общего пользования, подключенном к разъему 70, может быть уменьшен.
В первом и втором вариантах осуществления, описанных выше, предполагается, что источник 92 питания энергосистемы общего пользования подключен к разъему 70. Также можно подключить электрическую нагрузку вместо источника 92 питания энергосистемы общего пользования и подавать электроэнергию из гибридного транспортного средства на электрическую нагрузку.
В каждом из вышеописанных вариантов осуществления прерыватель для замыкания на землю может быть предусмотрен между разъемом 70 и силовыми линиями ACL1 и ACL2 (в третьем варианте осуществления - силовыми линиями ACL2 и ACL3). Дополнительно повышающий преобразователь, повышающий напряжение из устройства B накопления электроэнергии и подающий его в инверторы 10 и 20, может быть предусмотрен между устройством B накопления электроэнергии и инверторами 10 и 20. Известная схема модулятора, к примеру, может быть использована в качестве повышающего преобразователя.
Дополнительно в первом и втором вариантах осуществления, описанных выше, гибридное транспортное средство так называемого последовательно/параллельного типа, в котором мощность двигателя 4 распределяется на электродвигатель-генератор MG1 и колеса 2 с использованием устройства 3 деления мощности, описано. Тем не менее, настоящее изобретение также применимо к гибридному транспортному средству так называемого последовательного типа, в котором мощность двигателя 4 используется исключительно для формирования энергии посредством электродвигателя-генератора MG1, и движущая сила транспортного средства генерируется с помощью только электродвигателя-генератора MG2.
Дополнительно настоящее изобретение также применимо к электрическому транспортному средству, не оснащенному двигателем 4 и работающему только на электроэнергии, или к транспортному средству на топливных элементах, включающему в себя топливный элемент в качестве дополнительного источника питания.
Выше, по меньшей мере, один из электродвигателей-генераторов MG1 и MG2 соответствует "вращающейся электрической машине" по настоящему изобретению, а, по меньшей мере, один из инверторов соответствует "инверторному устройству" по настоящему изобретению. Дополнительно ЭБУ 30, 30A-30C соответствуют "контроллеру" по настоящему изобретению, а коммутатор 50A переменного тока соответствует "блоку ввода команд" по настоящему изобретению. Дополнительно резистор RD соответствует "первому сопротивлению затвора" по настоящему изобретению, а резистор RC соответствует "второму сопротивлению затвора" по настоящему изобретению. Дополнительно силовые линии ACL1-ACL3 и разъем 70 формируют "соединительное устройство" по настоящему изобретению.
Хотя настоящее изобретение подробно описано и иллюстрировано, очевидно, что оно является только способом иллюстрации и примером и не должно восприниматься как ограничение, идея и объем настоящего изобретения определены только прилагаемой формулой изобретения.
Реферат
Изобретение относится к области электротехники и может быть использовано в транспортном средстве с электрическим приводом, обеспечивающим подачу и прием электроэнергии между устройством накопления электроэнергии и источником питания или электрической нагрузкой вне транспортного средства. Техническим результатом является обеспечение учета шума, формируемого инвертором в момент, когда энергия подается и принимается между источником питания или электрической нагрузкой вне электродвигателя и устройством накопления электроэнергии, установленным на транспортном средстве. В транспортном средстве в режиме зарядки/разрядки инвертор (10, 20) выполняет преобразование энергии между устройством (В) накопления электроэнергии и источником (92) питания энергосистемы общего пользования, электрически подключенным к нейтральной точке (N1, N2) через силовую линию (АСL1, ACL2). В режиме зарядки/разрядки электронный блок управления (ЭБУ) (30) задает несущую частоту инвертора (10, 20), равную частоте, которая выше, чем в режиме движения. Дополнительно в режиме зарядки/разрядки управляющая схема (40) возбуждает инвертор (10, 20) с помощью сопротивления затвора, которое больше, чем в режиме движения. 10 з.п. ф-лы, 11 ил.
Комментарии