Мотоцикл с автоматическим опорным колесным устройством - RU2666063C1
Код документа: RU2666063C1
Чертежи
















Описание
Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится к мотоциклу и более конкретно к мотоциклу, оснащенному кабиной и автоматическим опорным колесным устройством, способным обеспечить маневренность и гибкость управления, а также улучшить устойчивость, тем самым обеспечивая комфортабельные условия езды для людей в широком возрастном диапазоне.
Предшествующий уровень техники настоящего изобретения
Вспомогательная колесная установка для двухколесного транспортного средства, раскрытая в публикации заявки на выдачу патента Кореи №10-2014-0030005, способна предотвратить падение транспортного средства и улучшить устойчивость во время движения. Вспомогательная колесная установка содержит демпфирующий узел, соединяющий кузов двухколесного транспортного средства со вспомогательным колесом и обеспечивающий демпфирующее усилие для ослабления удара, который иначе передавался бы корпусу через вспомогательное колесо, и блокирующий узел, выборочно блокирующий работу демпфирующего узла в результате внешнего воздействия пользователя, при этом пользователь может выборочно управлять демпфирующим узлом при помощи внешнего воздействия в соответствии с условиями вождения.
Однако так как мотоцикл не может оставаться устойчивым во время остановки, считается, что вспомогательная колесная установка для двухколесного транспортного средства является технологией, которой присущи значительные ограничения и которая не демонстрирует заметно улучшенного технического результата по сравнению с подставкой, которая поддерживает мотоцикл. Даже если эта технология используется на практике, она может оказаться неспособной поддерживать мотоцикл в вертикальном положении из-за неровности земной поверхности и значительного усилия, воздействующего на левую сторону или правую сторону мотоцикла, или неудобство, создаваемое этой технологией для мотоциклистов, может превышать удобство, создаваемое для мотоциклистов при оснащении мотоцикла указанной установкой.
Дополнительно, при воздействии неожиданной высокой ударной нагрузки на вспомогательные колеса или столкновении вспомогательных колес с относительно большим препятствием, существует риск того, что мотоцикл перевернется в результате ударной нагрузки, воздействующей на вспомогательные колеса.
В случае автоматического электроприводного поддерживающего устройства, характеризующегося наличием вспомогательных колес для помощи в безопасном вождении двухколесного транспортного средства, которое раскрыто в публикации заявки на выдачу патента Кореи №10-2010-0134988, когда двухколесное транспортное средство переходит в режим движения с низкой скоростью, в котором сложно сохранять равновесие корпуса двухколесного транспортного средства, вспомогательные колеса раскладываются, чтобы способствовать безопасному вождению, поддерживая вертикальное положение корпуса. Дополнительно, вспомогательные колеса предназначены для повышения устойчивости при уравновешивании корпуса, когда двухколесное транспортное средство движется по дороге, которая имеет уклон вправо или влево. С этой целью поддерживающее устройство выполнено с возможностью обеспечения двух точек опоры с обеих сторон колеса двухколесного транспортного средства и содержит левое и правое вспомогательные колеса, которые установлены с возможностью вращения для обеспечения двух точек опоры. Левое и правое вспомогательные колеса автоматически функционируют таким образом, чтобы взаимодействовать с земной поверхностью и поддерживать корпус в вертикальном положении, когда скорость транспортного средства ниже заданной скорости транспортного средства, и управляются таким образом, чтобы автоматически складываться в горизонтальное положение, когда скорость транспортного средства больше заданной скорости транспортного средства.
Однако даже эта технология может быть неспособной поддерживать мотоцикл в вертикальном положении из-за неровности земной поверхности и значительного выводящего из равновесия усилия, воздействующего с левой или правой сторон мотоцикла, или может причинить неудобства мотоциклистам. В частности, при воздействии неожиданной высокой ударной нагрузки на левое или правое вспомогательные колеса или столкновении вспомогательных колес с относительно большим препятствием, существует риск того, что двухколесное транспортное средство перевернется в результате ударной нагрузки, воздействующей на вспомогательные колеса. Кроме того, когда земная поверхность с левой и правой стороны характеризуется различными значениями высоты, вспомогательные колеса должны индивидуально опираться на земную поверхность в соответствии с разницей в высоте. Эта операция выполняется исключительно за счет пружин, при этом вспомогательные колеса одновременно перемещают на одной и той же высоте в прямом и обратном направлении при помощи троса и средства перемещения. Даже если вспомогательные колеса функционируют во время перемещения, горизонтально уравновешенный мотоцикл может стать очень неустойчивым из-за различий в земной поверхности с левой и правой сторон мотоцикла. Иными словами, эта технология не позволяет устранить нарушение поперечного равновесия и может требовать наличия управления натяжением пружин для поддержания равновесия. Однако применение механизма регулируемого натяжения пружин может приводить к излишней сложности, и в этом документе раскрыто только то, что вспомогательные колеса поднимают, когда наклон является неприемлемым. Если происходит подобное поднятие вспомогательных колес, это может вызвать немедленное падение мотоцикла.
В публикации заявки на выдачу патента Кореи №10-2013-0127718 раскрывается вспомогательная колесная установка для мотоцикла, способная эффективно поглощать удар для обеспечения комфорта стабильной езды и улучшения устойчивости при вождении. Вспомогательная колесная установка содержит вспомогательный колесный блок, присоединенный с возможностью вращения к корпусу мотоцикла, амортизирующий блок для смягчения удара, воздействующего на корпус мотоцикла через вспомогательный колесный блок, и стопорный блок для временного ограничения вращения вспомогательного колесного блока относительно корпуса мотоцикла, при этом ограничение, прикладываемое стопорным блоком, снимается и вспомогательный колесный блок вращается относительно корпуса мотоцикла, когда удар, сила которого превышает силу удара, которую может выдержать амортизирующий блок, воздействует на вспомогательный колесный блок.
Однако раскрытая в этом документе технология используется скорее в небольшом и простом механизме, который применяют для обнаружения или проверки длины или высоты продукта на небольшой конвейерной ленте или в измерителе. Раскрытая технология нуждается в значительных улучшениях для того, чтобы выдерживать значительно изменяющуюся нагрузку для уравновешивания мотоцикла и применяться в транспортном средстве, которое перемещается по неровной поверхности и подвергается значительным ударным нагрузкам во время движения. Основная концепция этой технологии не подходит для мотоцикла, центр тяжести которого значительно смещается в поперечном направлении и который, скорее всего, будет поперечно наклонен с избыточной нагрузкой. Дополнительно, эта технология не способна обеспечить устойчивость при изменении геометрии земной поверхности без воздействия на полную автономность управления мотоциклом водителем.
Хотя двухколесный мотоцикл предоставляет полную автономность управления и лучшую маневренность по сравнению с четырехколесным транспортным средством, в результате чего мотоциклисты подвержены значительным рискам, количество любителей мотоциклов возрастает с каждым днем. Из-за своей природы мотоциклы требуют использования большого числа технологий для достижения характерной цели установки вспомогательных колес с одновременным достижением мобильности и гибкости, а также обеспечением более высокой безопасности. Однако стандартные вспомогательные колесные устройства могут налагать ограничения на автономность водителей мотоциклов или могут не нести значительного улучшения, кроме функции поддержки и опоры, присущей стандартной подставке. Хотя имеется несколько передовых технологий, они не находят распространения среди мотоциклистов, так как они не обеспечивают достаточного управления в ответ на независимое поперечное изменение угла.
Раскрытие настоящего изобретения
Техническая задача
Таким образом, настоящее изобретение создано с учетом указанных выше проблем, и целью настоящего изобретения является создание мотоцикла с автоматическим опорным колесным устройством, которое способно сохранять уникальную мобильность и гибкость мотоцикла, поддерживать мотоцикл в вертикальном положении во время движения или остановки мотоцикла для обеспечения устойчивости, соответствующей четырехколесному транспортному средству, предотвратить скольжение на обледеневших дорогах или покрытых снегом дорогах для улучшения прямолинейного движения, эффективно поглощать ударную нагрузку или неровности земной поверхности для улучшения комфорта при езде и устойчивости, а также обеспечивать внутренне пространство, подобное внутреннему пространству четырехколесного транспортного средства, для устранения неудобств, связанных с ношением шлема, и повышения безопасности в случае столкновения.
Техническое решение
В соответствии с первым аспектом настоящего изобретения предлагается мотоцикл с автоматическим опорным колесным устройством, содержащий: левый рычаг опорного колеса, предусмотренный с левой стороны мотоцикла и характеризующийся наличием нижнего концевого участка, соединенного с возможностью вращения с левым опорным колесом, чтобы осуществлять перемещение левого опорного колеса в направлении вверх и вниз; правый рычаг опорного колеса, предусмотренный с правой стороны мотоцикла и характеризующийся наличием нижнего концевого участка, соединенного с возможностью вращения с правым опорным колесом, чтобы осуществлять перемещение правого опорного колеса в направлении вверх и вниз; левое приводное устройство, выполненное с возможностью приведения в движение левого рычага опорного колеса для осуществления подъема и спуска левого опорного колеса; правое приводное устройство, выполненное с возможностью приведения в движение правого рычага опорного колеса для осуществления подъема и спуска правого опорного колеса; датчик скорости, выполненный с возможностью определения скорости мотоцикла; и контроллер, соединенный с датчиком скорости, левым приводным устройством и правым приводным устройством, чтобы поднимать оба или одно из левого опорного колеса и правого опорного колеса, когда скорость, определенная датчиком скорости, превышает заданную скорость, и опускать оба или одно из левого опорного колеса и правого опорного колеса, когда скорость, определенная датчиком скорости, становится равной заданной скорости или меньше.
Предпочтительно, левый рычаг опорного колеса характеризуется наличием верхнего концевого участка, установленного с возможностью поворота на левом боковом участке мотоцикла, так чтобы вертикально поворачиваться вокруг вала, проходящего в горизонтальном направлении, и правый рычаг опорного колеса характеризуется наличием верхнего концевого участка, установленного с возможностью поворота на правом боковом участке мотоцикла, так чтобы вертикально поворачиваться вокруг вала, проходящего в горизонтальном направлении, при этом левое приводное устройство выполнено с возможностью поворота левого рычага опорного колеса в прямом и обратном направлениях, и правое приводное устройство выполнено с возможностью поворота правого рычага опорного колеса в прямом и обратном направлениях.
Предпочтительно, мотоцикл оснащен кабиной, характеризующейся наличием пространства для размещения водителя, причем каждая из обеих боковых частей заднего участка кабины содержит боковой отсек, предоставляющий пространство для размещения автоматического опорного колесного устройства.
Предпочтительно, передний участок кабины содержит: лобовое стекло, характеризующееся наличием внешней поверхности, соответствующей внешней поверхности части сферического корпуса; левый и правый стеклоочистители лобового стекла, изогнутые в форме дуги, чтобы войти в плотный контакт с внешней поверхностью лобового стекла; и средство привода стеклоочистителей лобового стекла, выполненное с возможностью приведения в движение стеклоочистители лобового стекла таким образом, чтобы они двигались попеременно вверх и вниз.
Приводное устройство может содержать: кулачок, выполненный с возможностью получать движущее усилие, сообщаемое электродвигателем подъема и опускания опорных колес, вал которого способен вращаться в прямом и обратном направлении, а также с возможностью поворачиваться вокруг горизонтального вала для того, чтобы толкать и опускать рычаги опорных колес; и возвратную пружину, выполненную с возможностью прикладывать тяговое усилие к рычагам опорных колес, чтобы поднимать рычаги опорных колес при уменьшении кратчайшего расстояния между центром поворота кулачка и кулачком и рычагами опорных колес.
Приводное устройство может содержать: установку на основе пневматического цилиндра, выполненную с возможностью поднимать или опускать поршневой шток в соответствии с электрическим сигналом, при этом установка на основе пневматического цилиндра выполнена с возможностью опускать рычаги опорных колес при опускании поршневого штока таким образом, чтобы он толкал рычаги опорных колес; и возвратную пружину, выполненную с возможностью прикладывать тяговое усилие к рычагам опорных колес, чтобы поднять рычаги опорных колес при поднятии поршневого штока.
Каждый из рычагов опорных колес может характеризоваться наличием изогнутого участка, имеющего часть, изогнутую с образованием L-образной или С-образной формы между верхним концевым участком и нижним концевым участком изогнутого участка, при этом внутренняя часть изогнутого участка может быть снабжена амортизирующим средством, так что указанное амортизирующее средство взаимодействует с кулачком.
Каждый из рычагов опорных колес может характеризоваться наличием изогнутого участка, имеющего часть, изогнутую с образованием L-образной или С-образной формы между верхним концевым участком и нижним концевым участком изогнутого участка, при этом внутренняя часть изогнутого участка может быть снабжена амортизирующим средством, так что указанное амортизирующее средство взаимодействует с поршневым штоком.
Амортизирующее средство может представлять собой пластинчатую пружину, характеризующуюся наличием одного конца, соединенного с соответствующим одним из рычагов опорных колес, и противоположного конца, при этом противоположный конец является свободным концом.
Пластинчатая пружина может характеризоваться наличием множества пластинчатых пружин, расположенных параллельно друг другу.
Амортизирующее средство может включать в себя: пластинчатую пружину, характеризующуюся наличием верхнего концевого участка, шарнирно прикрепленного к верхнему концу соответствующего одного из рычагов опорных колес, при этом пластинчатая пружина имеет изогнутую форму, проходящую вдоль изгиба соответствующего одного из рычагов опорных колес; и цилиндрическую пружину, характеризующуюся наличием верхнего конца, соединенного с нижним концевым участком пластинчатой пружины, и нижнего конца, соединенного с соответствующим одним из рычагов опорных колес, при этом указанная цилиндрическая пружина расположена с возможностью упругой деформации между пластинчатой пружиной и соответствующим одним из рычагов опорных колес.
Предпочтительно, мотоцикл дополнительно содержит: систему автоматического регулирования/поддержания вертикального положения, выполненную с возможностью измерять наклон мотоцикла в левую сторону или правую сторону относительно вертикального положения мотоцикла, при этом система автоматического регулирования/поддержания вертикального положения и контроллер соединены друг с другом, причем контроллер опускает только левое опорное колесо, когда мотоцикл наклоняется в левую сторону на заранее определенный угол или более, и опускает только правое опорное колесо, когда мотоцикл наклоняется в правую сторону на заранее определенный угол или более.
Предпочтительно, когда мотоцикл дополнительно наклоняется в левую сторону на заранее заданный угол после того, как левое опорное колесо опущено в соответствии с наклоном мотоцикла в левую сторону на заранее определенный угол или более, контроллер поднимает правое опорное колесо, и, когда мотоцикл дополнительно наклоняется в правую сторону на заранее заданный угол после того, как правое опорное колесо опущено в соответствии с наклоном мотоцикла в правую сторону на заранее определенный угол или более, контроллер поднимает правое опорное колесо.
Предпочтительно, система автоматического регулирования/поддержания вертикального положения содержит: маятник, соединенный с поворотным валом таким образом, чтобы свободно поворачиваться влево или вправо и постоянно располагаться вдоль вертикали под воздействием своей массы, даже если мотоцикл наклоняется; электродный стержень, соединенный с маятником, чтобы перемещаться совместно с маятником; центральную электродную пластину, неподвижно установленную на мотоцикле таким образом, чтобы взаимодействовать с электродным стержнем, когда мотоцикл расположен вертикально; и электродную подложку, расположенную последовательно с левой стороны или с правой стороны центральной электродной пластины и неподвижно установленную на мотоцикле таким образом, чтобы взаимодействовать с электродным стержнем, когда мотоцикл наклонен в левую и правую сторону на определенный угол или более, при этом электродный стержень взаимодействует с центральной электродной пластиной в пределах определенного диапазона наклона относительно вертикального положения мотоцикла, при этом электродная подложка включает в себя группу электродных подложек, и электродный стержень взаимодействует с одной электродной подложкой из группы электродных подложек в соответствии с присущим ему наклоном, тем самым определяя наклон мотоцикла.
Предпочтительно, автоматическое опорное колесное устройство содержит левое опорное колесное устройство и правое опорное колесное устройство, при этом левое опорное колесное устройство содержит левый рычаг опорного колеса и левое опорное колесо и соединено с направляющей, выполненной с возможностью линейного перемещения влево или вправо через левый боковой отсек, так чтобы перемещаться влево или вправо, и правое опорное колесное устройство содержит правый рычаг опорного колеса, правое опорное колесо и правое приводное устройство и соединено с направляющей, выполненной с возможностью линейного перемещения влево или вправо через правый боковой отсек, так чтобы перемещаться влево или вправо.
Предпочтительно, левая зубчатая рейка соединена с правой стороной левого опорного колесного устройства, и правая зубчатая рейка соединена с левой стороной правого опорного колесного устройства, при этом автоматическое опорное колесное устройство содержит зубчатое колесо, входящее в зацепление с левой зубчатой рейкой и правой зубчатой рейкой, и электродвигатель, выполненный с возможностью приведения в движение зубчатого колеса, причем электродвигатель приводится в действие для того, чтобы одновременно переместить левое опорное колесное устройство и правое опорное колесное устройство ближе друг к другу или дальше друг от друга.
Полезные эффекты
Как следует из вышесказанного, настоящее изобретение предоставляет мотоцикл с автоматическим опорным колесным устройством, а также кабиной. В результате этого мотоцикл может защищать мотоциклиста от дождя, снега, холода, жары и аналогичных природных воздействий, предотвращать аварии при помощи автоматического или ручного поддержания вертикального положения двухколесного транспортного средства во время движения, не заставляя мотоциклиста использовать свое тело для поддержания вертикального положения двухколесного транспортного средства, а также реализовывать указанные выше функции с низкими затратами путем установки автоматического опорного колеса в отсек кабины, при этом значительно снижается аэродинамическое сопротивление за счет обтекаемой формы корпуса.
В соответствии с настоящим изобретением левое и правое опорные колеса поддерживают мотоцикл с одинаковым усилием при нормальных дорожных условиях, и поднимаются вверх, когда скорость передвижения превышает заранее определенную скорость, чтобы обеспечить эффективное вождение при перемещении с высокой скоростью, и рычаги опорных колес гибко управляются таким образом, чтобы не ухудшать характеристики мотоцикла, при этом ударная нагрузка, передаваемая корпусу, поглощается при движении мотоцикла по неровной земной поверхности с низкой скоростью и опущенными опорными колесами. В результате этого может быть обеспечена безопасность и реализовано гибкое управление.
Кроме того, при тяжелых условиях вождения, таких как значительные неровности дорожной поверхности и скользкая дорожная поверхность, адаптируемый рабочий рычаг может работать таким образом, чтобы приспособиться к чрезвычайно неровной земной поверхности за счет функционирования системы управления, которая дополняет работу механизма, в котором используется простая пластинчатая пружина, состоящая из нескольких пластин, и цилиндрическая пружина, установленные на автоматическом механическом С- или L-образном рычаге. В результате этого ударное усилие, возникающее на неровной земной поверхности, может быть эффективно поглощено для обеспечения устойчивого движения. Кроме того, функция поддержания вертикального положения мотоцикла не ограничивается только режимом передвижения, и может быть реализована гибкая и надежная функция подставки во время стоянки мотоцикла. Таким образом, тяжелые мотоциклы могут легко эксплуатироваться даже пожилыми людьми и женщинами. Кроме того, пользователь может выборочно установить функционирование рычага опорного колеса в автоматический режим или в ручной режим в зависимости от условий вождения. Таким образом, более стабильное и динамичное вождение может быть реализовано в соответствии с условиями вождения.
Кроме того, функции предотвращения скольжения и поддержания устойчивости, а также автоматического поддержания вертикального положения могут стабильно осуществляться выдвижной лыжной установкой, которая может быть разъемно присоединена к рычагам опорных колес. В результате этого может быть улучшено прямолинейное движение мотоцикла и, следовательно, может быть реализовано более устойчивое вождение.
Благодаря полной автономности управления, динамической маневренности, скорости и прекрасной подвижности на узких дорогах, которые присущи вождению двухколесного мотоцикла, количество любителей мотоциклов растет, не смотря на то, что мотоциклы уступают четырехколесным транспортным средствам с точки зрения безопасности и мотоциклисты подвергаются многочисленным рискам получения серьезных травм.
Таким образом, необходимо обеспечить, прежде всего, безопасность с одновременным сохранением мобильности и гибкости, которые присущи мотоциклам. Благодаря устройству согласно настоящему изобретению может быть обеспечена безопасность, сравнимая с безопасностью четырехколесных транспортных средств, сохраняя при этом мобильность и гибкость, которые присущи мотоциклам. Кроме того, поскольку предусмотрено внутреннее пространство, окруженное кабиной, может быть обеспечен комфорт в очень холодную или очень жаркую погоду, сравнимый с комфортом четырехколесных транспортных средств, при этом может быть устранено неудобство, связанное с ношением шлема. Дополнительно, женщины и пожилые люди могут легко управлять мотоциклами среднего размера.
Краткое описание фигур
На фиг. 1А и 1В представлены виды сбоку, на которых показан мотоцикл с автоматическим опорным колесным устройством в соответствии с настоящим изобретением.
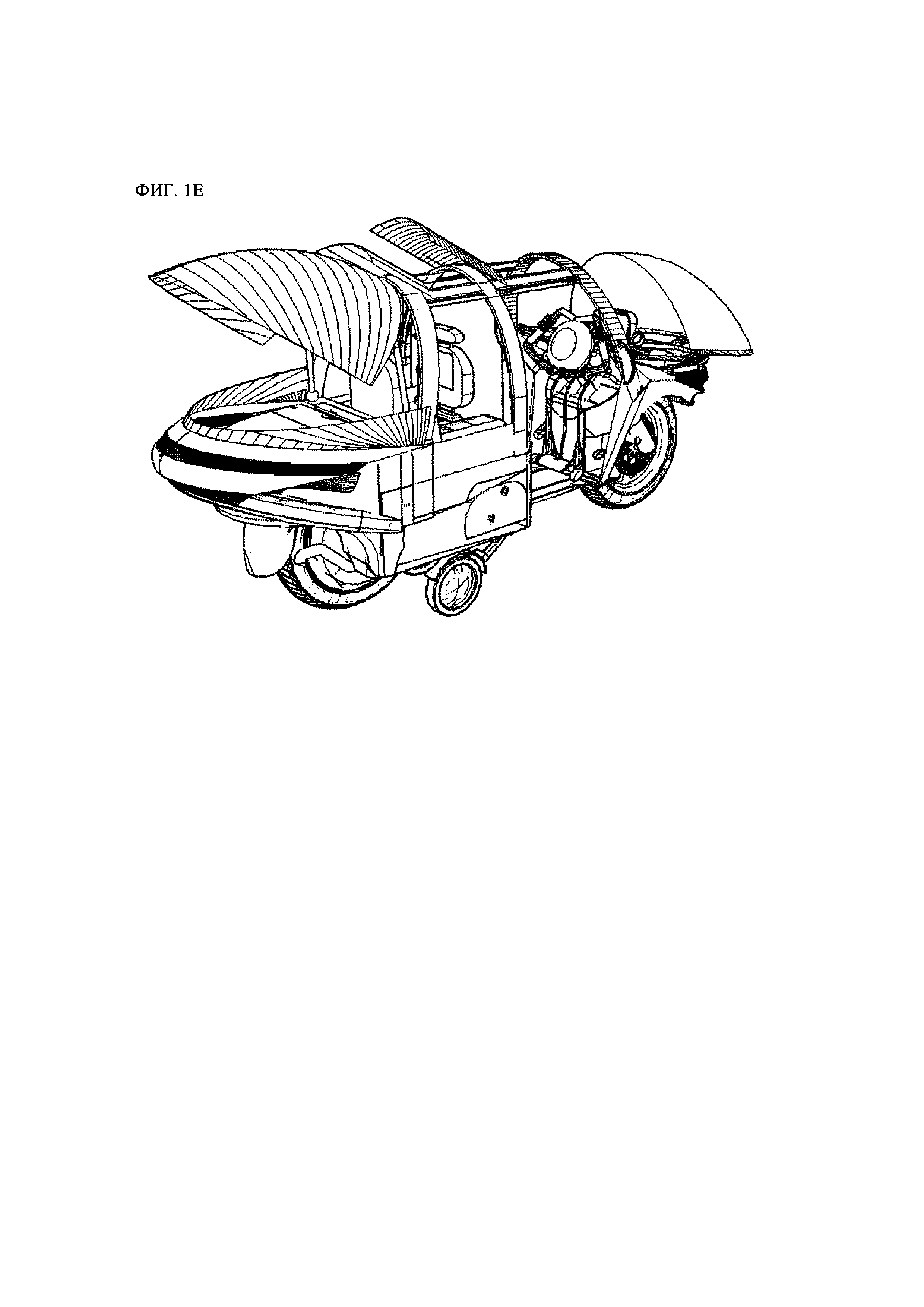
На фиг.1С-1E, 1G и 1I представлены виды в перспективе, на которых показан мотоцикл с автоматическим опорным колесным устройством в соответствии с настоящим изобретением.
На фиг. 1F представлен вид сзади, на котором показан мотоцикл с автоматическим опорным колесным устройством в соответствии с настоящим изобретением.
На фиг. 1Н представлен вид снизу, на котором показан мотоцикл с автоматическим опорным колесным устройством в соответствии с настоящим изобретением.
На фиг. 2А, 2В и 2D представлены виды в перспективе, на которых показано автоматическое опорное колесное устройство, установленное на мотоцикл в соответствии с первым вариантом осуществления настоящего изобретения.
На фиг. 2С представлен вид сбоку, на котором показано автоматическое опорное колесное устройство, установленное на мотоцикл в соответствии с первым вариантом осуществления настоящего изобретения.
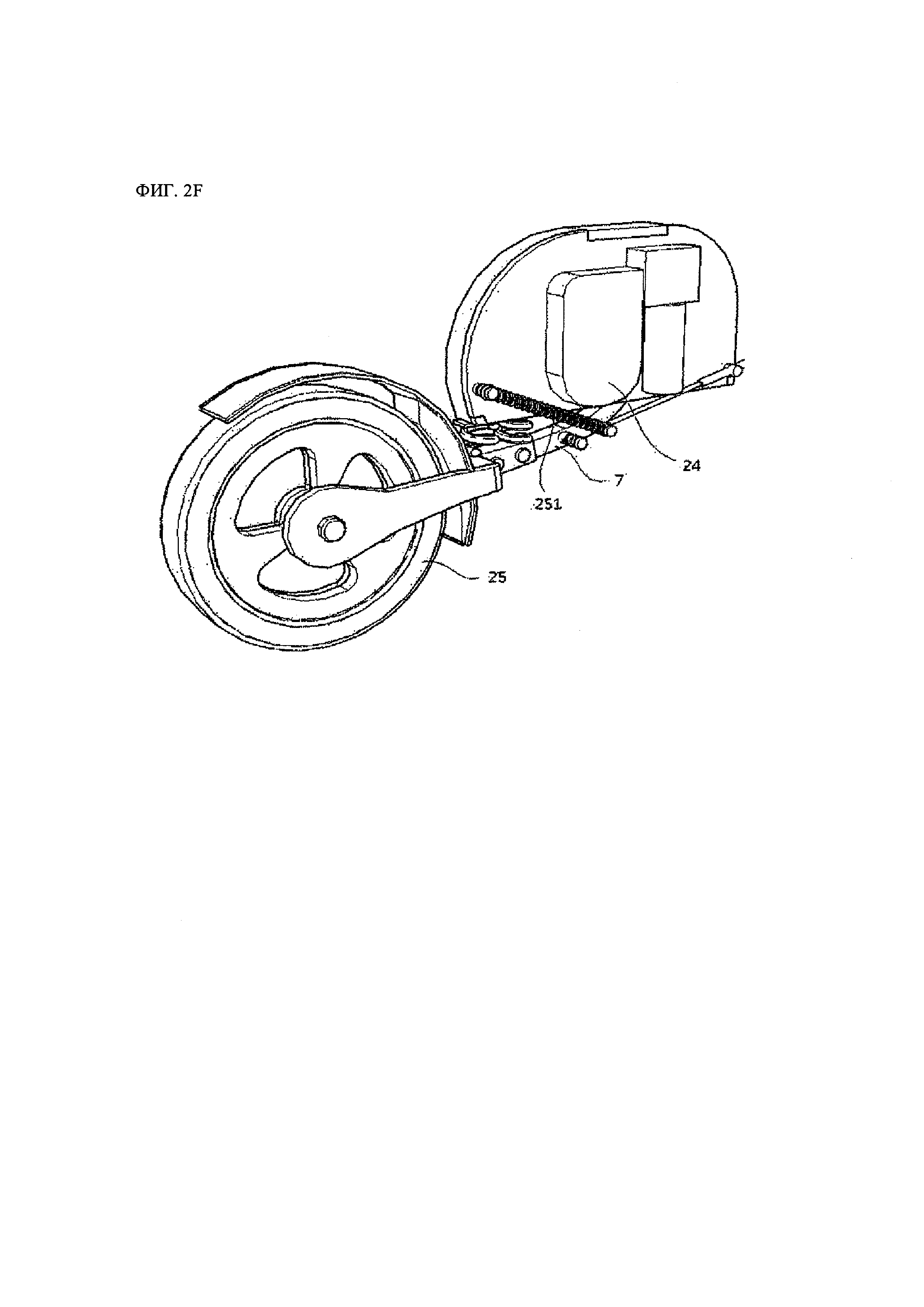
На фиг. 2Е и 2F представлены виды в перспективе, на которых показано автоматическое опорное колесное устройство, установленное на мотоцикл в соответствии со вторым вариантом осуществления настоящего изобретения.
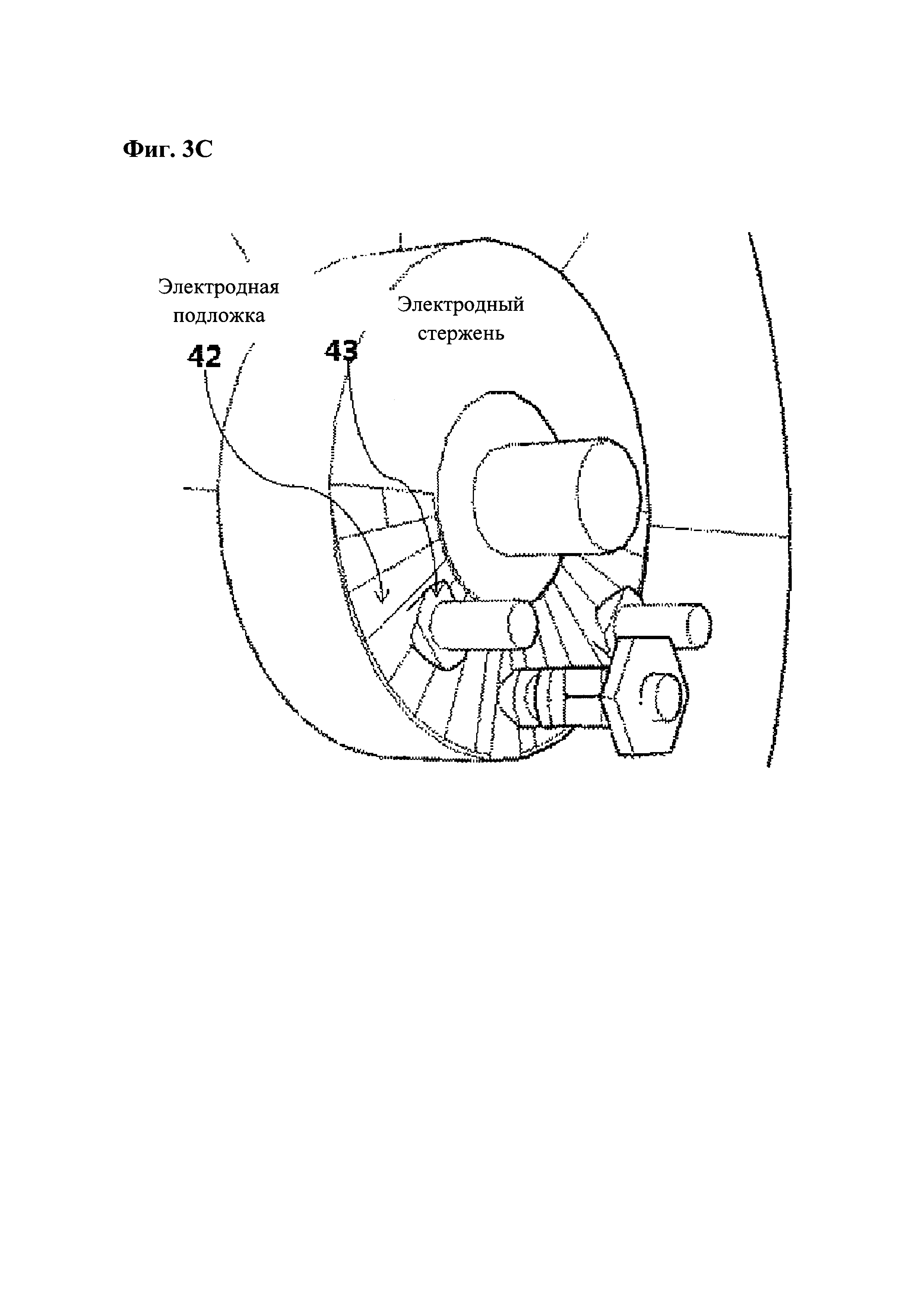
На фиг. 3А-3С представлены виды в перспективе, на которых показана система автоматического регулирования/поддержания вертикального положения мотоцикла с автоматическим опорным колесным устройством в соответствии с настоящим изобретением.
На фиг. 3D представлен вид спереди, на котором показана система автоматического регулирования/поддержания вертикального положения мотоцикла с автоматическим опорным колесным устройством в соответствии с настоящим изобретением.
На фиг. 4А-4С представлены виды в перспективе, на которых показаны мотоциклетные лыжи и выдвижное устройство мотоцикла с автоматическим опорным колесным устройством в соответствии с настоящим изобретением.
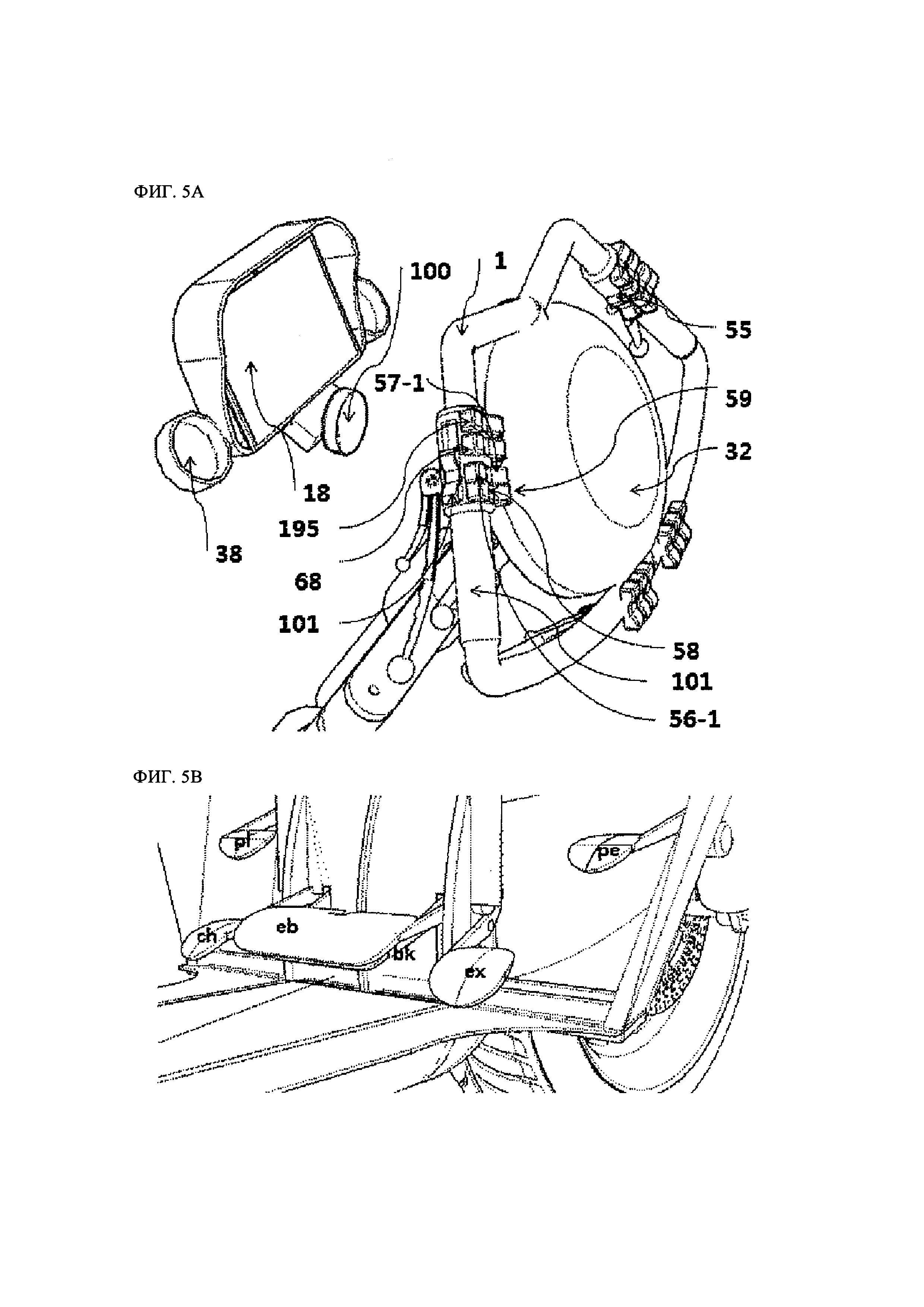
На фиг. 5А представлен вид в перспективе, иллюстрирующий блок управления мотоцикла с автоматическим опорным колесным устройством в соответствии с настоящим изобретением.
На фиг. 5В представлен вид в перспективе, иллюстрирующий снабженный педалями участок мотоцикла с автоматическим опорным колесным устройством в соответствии с настоящим изобретением.
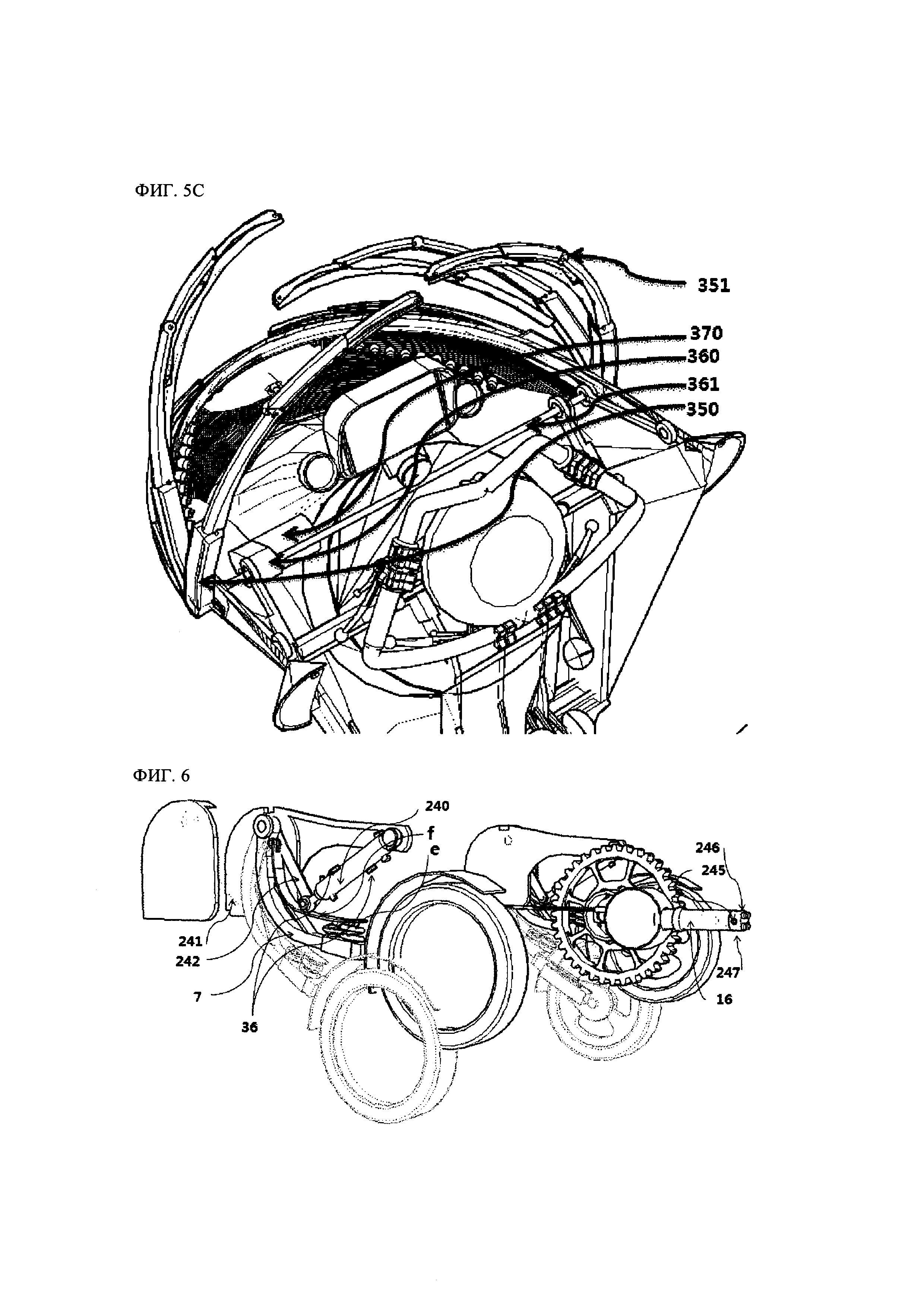
На фиг. 5С представлен вид в перспективе, иллюстрирующий щетку стеклоочистителя мотоцикла с автоматическим опорным колесным устройством в соответствии с настоящим изобретением.
На фиг. 6 представлен вид в перспективе, на котором показано автоматическое опорное колесное устройство, установленное на мотоцикл в соответствии с третьим вариантом осуществления настоящего изобретения.
На фиг. 7А-7С представлены виды в перспективе, иллюстрирующие устройство рекуперации энергии для мотоцикла с автоматическим опорным колесным устройством в соответствии с третьим вариантом осуществления настоящего изобретения.
На фиг. 8А и 8В представлены функциональные электрические схемы мотоцикла с автоматическим опорным колесным устройством в соответствии с настоящим изобретением.
Перечень позиций
6: Кулачковый вал
7: Рычаг опорного колеса
8: Приводной вал
10: Зубчатое колесо
11: Зубчатая рейка
ЛН: Линейная направляющая
14: Электродвигатель-генератор
РУ: Рычаг управления
15: Трос
19: Пластинчатая пружина
24: Кулачковая коробка
25: Опорное колесо
29: Поворотное колесо
31: Электродвигатель подъема и опускания опорных колес
35: Зубчатый редуктор
35а: Ведомая шестерня
35b: Ведущая шестерня
38: Спидометр
39: Электромагнитный клапан
42: Электродная подложка
43: Электродный стержень
45: Центральная электродная пластина
47: Маятник
51: Реле
51а: ВКЛ-контактный участок
51с: Катушка
55: Переключатель опорных колес
55с: Перекидной контактный участок
56 - 1: Переключатель выдвижения
57 - 1: Переключатель втягивания
57: Конечный переключатель
58t: Переключатель дроссельной заслонки
59: Переключатель принудительного опускания
60: Предохранитель
68: Переключатель опускания лыж
92: НЗ-контактный участок
101: Ручка газа переднего привода
175: Воздушный ресивер
179: Соединительный кулачок
180: Приводное колесо
181: Опора компрессора
240: Цилиндр
245: Впускное отверстие
246: Выпускное отверстие
248: Соединительный шток
250: Кулачок
251: Возвратная пружина
252: Боковой отсек
253: Шкив приводного вала заднего колеса
350, 351: Щетка стеклоочистителя
360: Редуктор
361: Вал
370: Приводящий в движение щетки электродвигатель
380: Мотоциклетные лыжи
381: Гнездо для крепления лыжи
382: Закрепляемый рычаг
eb: Ножная педаль торможения
bk: Тормоз
Лучший вариант осуществления
Далее будет приведено подробное описание конкретных вариантов осуществления настоящего изобретения со ссылками на прилагаемые фигуры.
На фиг. 1A-1I показан мотоцикл, оснащенный кабиной, покрывающей весь мотоцикл. Поскольку кабина покрывает весь мотоцикл, и нога мотоциклиста не может достать до земной поверхности, когда дверь закрыта, мотоциклист не может использовать свои ноги для поддержания вертикального положения мотоцикла. По этой причине пара колес, включающая в себя левое и правое автоматические опорные колеса 25, взаимодействует с земной поверхностью, чтобы удерживать мотоцикл вертикально, когда мотоцикл останавливается или движется.
В отличие от обычных случаев, когда вертикальное положение мотоцикла поддерживается при помощи ног мотоциклиста, предлагаемый мотоцикл может остановиться или перемещаться, опираясь на опорные колеса 25, взаимодействием с земной поверхностью которых управляют при помощи схемы автоматического поддержания вертикального положения, изображенной на фиг. 8А и 8В. Когда управление опорными колесами 25 осуществляется в автоматическом режиме, езда на мотоцикле становится подобной перемещению на четырехколесном транспортном средстве, при этом мотоциклисту нет необходимости прикладывать усилия для удержания мотоцикла в вертикальном положении.
Настоящее изобретение предоставляет устройство, характеризующееся наличием левого и правого опорных колес 25, которые независимо приводят в действие (опускают), чтобы обеспечить безопасное вождение, при этом корпус двухколесного транспортного средства удерживается вертикально, когда двухколесное транспортное средство движется с низкой скоростью, при которой трудно поддерживать равновесие двухколесного транспортного средства. Устройство снабжено системой автоматического регулирования/поддержания вертикального положения для улучшения устойчивости центра тяжести корпуса транспортного средства, когда двухколесное транспортное средство движется по дороге с поперечным уклоном.
Левое и правое опорные колеса 25 управляются системой автоматического регулирования/поддержания вертикального положения для обеспечения поддержания вертикального положения корпуса транспортного средства путем автоматического взаимодействия с земной поверхностью, когда скорость транспортного средства ниже заданной скорости транспортного средства, а также автоматического подъема колес в безопасное положение и автоматической реакции на неровную поверхность, когда скорость транспортного средства выше заданной скорости транспортного средства.
Когда двухколесное транспортное средство движется с высокой скоростью, двухколесное транспортное средство, как изображено на фиг. 1А, потребляет меньше топлива, чем четырехколесное транспортное средство, и, следовательно, характеризуется отличной эффективностью, при этом мотоциклист может получать удовольствие от типичного ощущения скорости, предоставляемого двухколесными транспортными средствами. Кроме того, когда скорость становится менее 15 км/ч, опорные колеса 25 частично опускают, так чтобы не влиять на автономное управление мотоциклиста, который приспосабливается к центростремительной силе и центробежной силе, а также чтобы обеспечить безопасный угол контакта с земной поверхностью, который является основным углом, препятствующим падению в случае чрезвычайной ситуации. Таким образом, двухколесное транспортное средство предоставляет водителю гибкость управления, препятствуя падению. Под частичным опусканием следует понимать состояние, в котором автоматические опорные колеса 25 располагаются на небольшом расстоянии от земной поверхностью, не касаясь земной поверхности, в то время как мотоцикл сохраняет вертикальное положение.
Должны ли опорные колеса касаться земной поверхности, а также продолжительность взаимодействия с земной поверхностью задаются схемой определения скорости, изображенной на фиг. 8В. На фиг. 2D, когда кулачок находится в положении а, опорные колеса находятся в частично опущенном состоянии, и мотоцикл гибко поддерживается за счет упругости пружины, чтобы не перевернуться, даже в случае наклона мотоцикла в одну сторону. Дополнительно, реагирующая на земную поверхность система автоматического регулирования/поддержания вертикального положения, в которой используется сила тяжести, как изображено на фиг. 3A-3D, автоматически поддерживает безопасный угол контакта с земной поверхностью.
Когда мотоцикл движется со скоростью до 5 км/ч и, следовательно, почти неподвижен или полностью остановлен, управление опорными колесами 25 осуществляют таким образом, чтобы они полностью касались земной поверхности.
Когда скорость мотоцикла увеличивается выше 15 км/ч, опорные колеса 25 в частично опущенном состоянии, в котором автоматические опорные колеса 25 располагаются на небольшом расстоянии от земной поверхности, предварительно поднимаются, так что нижние концы опорных колес 25 располагаются на линии h, изображенной на фиг. 2С. В предварительно поднятом положении электродвигатель 31 подъема и опускания опорных колес находится во включенном состоянии. Однако когда скорость увеличивается выше 60 км/ч, опорные колеса 25 удерживают в полностью поднятом положении. При этом электродвигатель 31 подъема и опускания опорных колес находится в выключенном состоянии.
Когда пользователь переводит в нижнее положение переключатель 59 принудительного опускания, изображенный на фиг. 5А, частично опущенное или предварительно поднятое состояние поддерживается только при скорости 60 км/ч или менее. При скорости выше 60 км/ч происходит полное поднятие колес, что увеличивает устойчивость при перемещении с высокой скоростью.
Спидометр 38, изображенный на фиг. 5А, передает сигнал в схему определения скорости при достижении мотоциклом заранее определенной скорости. На фиг. 8В, когда скорость мотоцикла больше или равна 60 км/ч, выходное напряжение катушки 810 лампы становится больше или равным заранее определенному значению, и реле 90 управляет НЗ-контактным участком 92 для поддержания полного поднятия. В этом состоянии электродвигатель 31 подъема и опускания опорных колес находится в выключенном состоянии и не происходит опускание опорного колеса 25.
При снижении скорости мотоцикла также снижается выходное напряжение катушки 810 лампы. Когда выходное напряжение падает ниже заранее определенного значения для отпускания реле 90, НЗ-контактный участок 92 обеспечивает привидение в движение рычаг 7 опорного колеса при помощи электродвигателя 31 подъема и опускания опорных колес.
На электрической схеме 2, изображенной на фиг. 8А, представлена схема управления электродвигателя 31 подъема и опускания опорных колес для приведения в действие опорных колес 25. Один вывод электродвигателя 31 подъема и опускания опорных колес присоединен к положительной клемме аккумулятора через ВКЛ-контактный участок 51 а реле 51, и отрицательная клемма аккумулятора заземлена через корпус контактного участка. Другой вывод электродвигателя 31 подъема и опускания опорных колес присоединен к положительной клемме аккумулятора 52 через ВКЛ-контактный участок 53а реле 53 и присоединен к отрицательной клемме аккумулятора через НЗ-контактный участок 53b реле 53.
Один конец катушки 51 с реле 51 соединен с контактным участком 55а переключателя 58 опорных колес для поворота опорного колеса 25 в положение для взаимодействия с земной поверхностью, и другой конец катушки соединен с конечным переключателем 57, что служит для определения того, когда указанная подставка находится в выдвинутом положении. Напротив, один конец катушки 53с реле 53 соединен с перекидным контактным участком 55а переключателя 58 опорных колес для поворота подставки в поднятое положение, и другой конец катушки соединен с отрицательной клеммой аккумулятора 52 через конечный переключатель 57. что служит для определения того, когда подставка находится в поднятом положении. Перекидной контактный участок 55 с переключателя 58 опорных колес соединен с положительной клеммой аккумулятора через переключатель 58 дроссельной заслонки, переключатель 59 принудительного опускания и предохранитель 60.
Как показано на фиг. 5А, переключатель 58 опорных колес расположен в блоке переключателей руля для облегчения доступа водителя и регулирует функционирование опорного колеса 25. Угловое положение кулачка 250. изображенного на фиг. 2D, определяют при помощи конечного переключателя 57 или присоединяемого дистанционного датчика.
Конечный переключатель 57 и ведущая шестерня 35b, которая установлена с возможностью вращения, установлены внутри кулачковой коробки 24, изображенной на фиг. 1D. Когда опорные колеса 25 полностью опущены на земную поверхность, соприкасаясь с ней, конечный переключатель 57 выключается в результате прикосновения к участку с, изображенному на фиг. 2D. Конечный переключатель 57 также выключается в результате прикосновения к участку d, изображенному на фиг. 2D, когда опорные колеса 25 полностью подняты.
Переключатель 56-1 выдвижения, изображенный на фиг. 5А, используют для поперечного выдвижения выдвижной лыжной установки из положения 12 в положение 13, изображенные на фиг. 1D. Выдвижная лыжная установка выполнена с возможностью выдвижения, когда угол поворота опорных колес 25 находится в положениях а и b, изображенных на фиг. 2D, и скорость мотоцикл составляет 60 км/ч или менее. Выдвижная лыжная установка втягивается в направлении корпуса мотоцикла из соображений безопасности, когда его скорость превышает заданную скорость.
Переключатель 56-1 выдвижения выключается при выдвижении опорного колеса 25, и переключатель 57-1 втягивания выключается при втягивании опорного колеса 25. Оба переключателя включены, когда точки контакта кулачка 250 и переключателя 57 находятся в положениях a, b и с, изображенных на фиг. 2D. Опорные колеса 25 поворачиваются между опущенным положением и поднятым положением и останавливаются в двух положениях, которые регулируются конечным переключателем 57.
Схема определения скорости на электрической схеме 3, изображенной на фиг. 8В, определяет, движется ли транспортное средство с высокой скоростью, замедляется или остановлено. Осуществляют измерение силы тока в амперах спидометра 38. Когда скорость выше или равна 60 км/ч, опорные колеса находятся в полностью поднятом положении. Когда скорость составляет от 15 км/ч до 60 км/ч, опорные колеса находятся в предварительно поднятом положении. Когда скорость составляет от 5 км/ч до 15 км/ч, опорные колеса находятся в частично опущенном положении. Когда скорость составляет от 0 км/ч до 5 км/ч, опорные колеса находятся в положении для полного взаимодействия с земной поверхностью.
Когда сила тока в амперах спидометра 38 повышается в соответствии с увеличением скорости и, следовательно, переключатель 58 опорных колес поворачивается в верхнее положение, ток подается от аккумулятора на катушку 51 с реле 51 через замкнутую цепь, состоящую из переключателя 58 опорных колес и конечного переключателя 57. В результате ВКЛ-контактный участок 51а замыкается для функционирования электродвигателя 31 подъема и опускания опорных колес и электромагнитного клапана. Вращательное усилие электродвигателя 31 подъема и опускания опорных колес передается на ведущую шестерню 35b, которая выполнена в форме червяка, через зубчатый редуктор 35. Затем ведомая шестерня 35а в форме червячной шестерни, входящей в зацепление с ведущей шестерней 35b, вращает шестерню, предназначенную для вращения вокруг кулачкового вала 6. В результате этого происходит вращение кулачкового вала 6 и, следовательно, поворот кулачка 250, поворачивающегося вокруг кулачкового вала 6 на противоположной стороне кулачковой коробки 24. Поворот кулачка 250 и действие возвратной пружины 251 вызывают поворот рычага 7 опорного колеса, в результате которого поворачиваются опорные колеса 25.
Как показано на фиг. 2F, Один конец возвратной пружины 251 шарнирно прикреплен к внутренней поверхности кулачковой коробки 24, а другой конец возвратной пружины шарнирно прикреплен к внутренней поверхности нижнего участка рычага 7 опорного колеса. Таким образом, возвратная пружина прикладывает направленное вверх тянущее усилие к опорным колесам 25. Следовательно, когда кулачок 250 поворачивается, толкая рычаг 7 опорного колеса, происходит опускание опорных колес 25. Когда кулачок 250 поворачивается в обратном направлении, в результате чего исчезает усилие, толкающее опорные колеса 25, опорные колеса 25 поднимаются под действием возвратной пружины 251 пропорционально повороту кулачка 250 в обратном направлении.
Поворот, осуществляемый электродвигателем 31 подъема и опускания опорных колес, останавливают, когда конечный переключатель 57 обнаруживает полное поднятие опорных колес 25. Когда мотоцикл стоит, являясь неподвижным, электромагнитный клапан 39 и электродвигатель 31 подъема и опускания опорных колес отключены, при этом мотоцикл в этом состоянии поддерживается при помощи предохранительного фиксирующего троса, присоединенного к ножному тормозу. При запуске мотоцикла и подачи питания опорные колеса 25 могут вернуться на стадию подготовки к движению.
Опорные колеса 25 могут быть возвращены в поднятое положение при помощи электродвигателя 31 подъема и опускания опорных колес. Когда конечный переключатель 57 включен, происходит поворот рычага 7 опорного колеса в поднятое положение. Реле 53 срабатывает для замыкания ВКЛ-контактного участка 53а. В результате этого ток протекает через электродвигатель 31 подъема и опускания опорных колес в противоположном направлении, и опорные колеса 25 поворачиваются в поднятое положение.
Как показано на электрической схеме 1 и электрической схеме 2, если скорость мотоцикла равняется 0 км/ч, вертикальный угол мотоцикла находится в диапазоне от 0 до 2 градусов и опорные колеса 25 находятся в полностью опущенном положении, питание мотоцикла готово к отключению, и конечный переключатель 57 прерывает протекание электрического тока к электродвигателю 31 подъема и опускания опорных колес. Прерывание питания происходит только тогда, когда переключатель 58t дроссельной заслонки находится в положении ВКЛ, и транспортное средство является неподвижным.
Схема определения скорости мотоцикла расположена между спидометром 38 и переключателем 58 опорных колес. Схема определения скорости функционирует при снижении скорости мотоцикла до заранее заданного предельного значения или менее. При функционировании схемы определения скорости электродвигатель поворачивает опорные колеса 25.
Опорные колеса 25 поднимаются, когда скорость мотоцикла больше или равна заданному значению и автоматический переключатель находится в замкнутом состоянии. Когда скорость мотоцикла меньше или равна заданному значению, происходит опускание опорных колес 25.
Хотя реле с нормально замкнутыми контактами, приводимое в действие генератором переменного тока, изображено на электрической схеме, представленной на фиг. 8В, реле постоянного тока также может использоваться. При снижении скорости мотоцикла ниже заданного значения происходит подача надлежащего питания, так чтобы произошло опускание опорных колес 25. НЗ-контактный участок 92 соединен с аккумулятором через переключатель 59 принудительного опускания и предохранитель 60, а также соединен с перекидным 55 с контактным участком через реле постоянного тока.
В соответствии с описанной выше конфигурацией рычаг 7 опорного колеса и электродвигатель 31 подъема и опускания опорных колес соединены таким образом, чтобы функционирование автоматического опорного колесного устройства осуществлялось на основе увеличения/снижения скорости на спидометре 38 мотоцикла. Кроме того, операция соединения осуществляется схемой управления, и опорные колеса 25 и электродвигатель 31 подъема и опускания опорных колес могут быть соединены или разъединены непосредственно при помощи схемы управления. В частности, автоматический режим работы схемы управления функционально связан с изменением скорости мотоцикла. Следовательно, если схема управления не работает из-за отказа или подобной ситуации, управление опорными колесами 25 может быть осуществлено вручную при помощи переключателя вверх/вниз без демонтирования устройства.
Кроме того, поскольку водитель имеет возможность управлять работой схемы управления, он может ознакомиться с работой указанной схемы и дополнительно повысить эксплуатационную устойчивость опорных колес 25.
Согласно первому варианту осуществления, изображенному на фиг. 2А-2С, при использовании опорных колес 25, установленных для поддержания поперечного безопасного расстояния, которое является расстоянием между левым и правым опорными колесами 25, чтобы поддерживать мотоцикл в вертикальном положении, предусмотрены несколько листов пластинчатых пружин 19, уложенных в стопку для функционирования в качестве амортизирующего средства, чтобы справиться с мгновенным изменением земной поверхности. Количество уложенных в стопку пластинчатых пружин 19 может быть отрегулировано в зависимости от массы мотоцикла.
Для того чтобы пластинчатые пружины 19 располагались на рычаге 7 опорного колеса для функционирования в качестве амортизирующего средства, рычаг 7 опорного колеса постепенно проходит вниз относительно поворотного вал рычага 7 опорного колеса и резко изгибается в направлении назад, чтобы образовать L-образную или С-образную форму. Пластинчатые пружины 19 вставляют в изогнутый участок рычага 7 опорного колеса, который изогнут с образованием L-образной формы или С-образной формы. Нижний конец пластинчатых пружин 19 входит в неподвижное зацепление с нижней частью изогнутого участка рычага 7 опорного колеса, а верхний конец пластинчатых пружин 19 является свободным концом, который расположен близко к верхней части изогнутого участка рычага 7 опорного колеса, при этом он не входит в зацепление с верхней частью. Пластинчатая пружина 19 установлена таким образом, чтобы располагаться наклонно вниз при прохождении от передней стороны к задней стороне внутри изогнутого участка.
Пластинчатая пружина 19 является амортизирующим средством, позволяющим рычагу 7 опорного колеса, находящемуся в вертикальном положении, плавно перемещаться в направлении вверх/вниз. Кроме того, существует возможность использовать цилиндрическую пружину вместо пластинчатой пружины 19 в качестве амортизирующего средства.
Позициями 19-1, 19-2, 19-3 и 19-4 на фиг. 2А обозначены пластинчатые пружины, которые расположены бок о бок. При приведении в действие электродвигателя 31 подъема и опускания опорных колес кулачок 250 поворачивается таким образом, чтобы толкнуть пластинчатую пружину 19-1, которая взаимодействует с кулачком 250. При малой нагрузке, приложенной к пластинчатой пружине, сжимается только пластинчатая пружина 19-1, расположенная в крайнем верхнем положении стопки, в результате чего только одна пластинчатая пружина 19-1 осуществляет амортизирующую функцию для удержания мотоцикла в вертикальном положении. Когда нагрузка, прикладываемая к пластинчатой пружине, увеличивается в результате поворота кулачка 250, происходит сжатие первой пластинчатой пружины 19-1 и второй пластинчатой пружины 19-2. При приложении максимально возможной нагрузки происходит сжатие всех пластинчатых пружин 19-1, 19-2, 19-3 и 19-4, чтобы наиболее осуществить максимальное ослабление ударного воздействия.
В случае второго варианта осуществления, изображенного на фиг. 2Е и 2F, при использовании опорных колес 25 для поддержания вертикального положения, амортизирующее средство, состоящее из пластинчатых пружин и цилиндрической пружины, необходимое для того, чтобы справиться с мгновенными изменениями земной поверхности, предусмотрено в каждом из левого опорного колесного устройства и правого опорного колесного устройства.
Для того чтобы установить каждое амортизирующее средство на рычаге 7 опорного колеса, необходимо сформировать место для установки амортизирующего средства на рычаг 7 опорного колеса. Следовательно, рычаг 7 опорного колеса изгибают с образованием L-образной формы или С-образной формы, чтобы сформировать изогнутый участок, и амортизирующее средство устанавливают внутри указанного изогнутого участка.
В амортизирующем средстве нижний конец цилиндрической пружины входит в зацепление с верхней поверхностью нижнего концевого участка, а именно свободного конца, рычага 7 опорного колеса, так чтобы левый и правый рычаги 7 опорных колес, которые находятся в вертикальном положении, могли плавно перемещаться в вертикальном направлении. Пластинчатые пружины изгибаются внутри L-образной формы или С-образной формы подобно форме рычага 7 опорного колеса и располагаются над рычагом 7 опорного колеса, при этом между пластинчатыми пружинами и рычагом 7 опорного колеса формируется небольшой просвет. Верхний конец пластинчатых пружин шарнирно прикреплен к участку, смежному с поворотный валом рычага 7 опорного колеса, и нижний конец, а именно свободный конец, пластинчатых пружин входит в зацепление с верхним концом цилиндрической пружины. Таким образом, цилиндрическая пружина функционирует для поглощения ударной нагрузки между пластинчатыми пружинами и рычагом 7 опорного колеса.
Когда кулачок 250 поворачивается в прямом направлении для нажатия на пластинчатые пружины, пластинчатые пружины и цилиндрическая пружина нажимают на рычаг 7 опорного колеса. Вследствие этого рычаг 7 опорного колеса поворачивается в направлении вниз. Когда кулачок 250 поворачивается в обратном направлении, возвратная пружина 251 тянет рычаг 7 опорного колеса в направлении вверх, при этом происходит поднятие рычага.
Когда мотоциклу, поддерживаемому в вертикальном положении, встречаются на пути значительные неровности земной поверхности, левое и правое опорные колеса 25 должны быть опущены в различной степени. В качестве средства для преодоления неровностей земной поверхности предусмотрена система автоматического регулирования/поддержания вертикального положения.
Как показано на фиг. 3А, маятник 47 и электродный стержень 43, которые связаны друг с другом для перемещения как одно целое, соединены с возможностью вращения с центром системы автоматического регулирования/поддержания вертикального положения, при этом маятник 47 и электродный стержень 43 автоматически поворачиваются и всегда располагаются вдоль вертикали под воздействием массы маятника 47, даже если мотоцикл наклоняется в левую сторону или правую сторону.
Как изображено на фиг. 3С и 3D, электродные подложки 42 и центральная электродная подложка 45 объединены с образованием полукруглой формы. Центральная электродная подложка 45, которая находится по центру между левыми и правыми сторонами, расположена в форме дуги в самом нижнем положении. Электродные подложки 42 расположены последовательно друг за другом с каждой из левой и правой сторон центральной электродной подложки 45. Электродная подложка 42 и центральная электродная подложка 45 образованы при помощи пяти отдельных медных пластин. Как показано на фиг. 3D, подложки разделены на пять областей: область К, область L, область R, область L-R и область R-L.
Электродный стержень 43 представляет собой медный электродный стержень. Электродный стержень 43 приводится во взаимодействие с передней поверхностью электродной подложки в любой одной из пяти областей. Путем приложения электрического тока к электродной подложке, которая взаимодействует с электродным стержнем 43, определяют угол наклона мотоцикла.
Когда электродный стержень 43 входит в область К на центральной электродной подложке 45 под углом в пределах 2° от вертикали относительно мотоциклиста, левый и правый электродвигатели 31 подъема и опускания опорных колес совместно приводят в действие для одновременного опускания левого и правого опорных колес на земную поверхность. В результате этого вертикальное положение мотоцикла поддерживают с отклонением в диапазоне от 0° до 2°.
Как показано на фиг. 3D, когда мотоцикл наклоняется влево с образованием вертикального угла (угла наклона) в диапазоне от 2° до 5° и, следовательно, электродный стержень 43 входит в область L, электродвигатель 31 подъема и опускания опорных колес с левой стороны приводят в действие, так как переключатель (перекл.) системы автоматического регулирования/поддержания вертикального положения переходит в замкнутое состояние, то есть в состояние подачи электроэнергии, при этом вертикальный угол (угол наклона) мотоцикла находится в диапазоне от 0° до 1°. С другой стороны, электродвигатель 31 подъема и опускания опорных колес с правой стороны не приводят в действие, и переключатель (перекл.) находится в разомкнутом состоянии, то есть в состоянии прерывания подачи электроэнергии. Таким образом, только левое опорное колесо 25 опускают для смещения угла наклона вправо, чтобы поддержать вертикальное положение.
При этом чувствительность рабочего угла наклона может быть отрегулирована в соответствии с предпочтением пользователя при помощи регулировочной тяги, установленной на маятнике 47 системы автоматического регулирования/поддержания вертикального положения.
Когда мотоцикл наклоняется влево с образованием вертикального угла (угла наклона) больше или равного 5° и, следовательно, электродный стержень 43 входит в область L-R, электродвигатель 31 подъема и опускания опорных колес с левой стороны активируют при помощи переключателя (перекл.) в замкнутом состоянии системы автоматического регулирования/поддержания вертикального положения и, следовательно, приводят в действие для установки вертикального угла в диапазоне от 0° до 1°. С другой стороны, вал электродвигателя 31 подъема и опускания опорных колес с правой стороны поворачивается против часовой стрелки (пр. чс), так что правое опорное колесо 25 поднимается для соответствия земной поверхности с левой и правой сторон мотоцикла. Вместе с этим, правое опорное колесо 25 поддерживается в подпружиненном состоянии, так как на него воздействует усилие натяжения пластинчатой пружины 19. При этом правый электродвигатель 31 подъема и опускания опорных колес активируют при помощи перевода переключателя (перекл.) в замкнутое состояние для вращения в направлении против часовой стрелки(пр. чс.) в состоянии подачи электроэнергии. В результате этого электродвигатель 31 подъема и опускания опорных колес с правой стороны смещает угол наклона вправо. Когда угол наклона возвращается в область центральной электродной пластины 45, находясь при этом в диапазоне от 0° до 2°, в соответствии с описанными выше операциями, система автоматического регулирования/поддержания вертикального положения осуществляет переключение для поворота вала электродвигателя в направлении по часовой стрелки(чс). В результате этого опорные колеса 25 приведены в непосредственное взаимодействие с земной поверхностью, и мотоцикл автоматически сохраняет вертикальное положение.
Иначе говоря, когда мотоцикл проезжает, например, по осевшему участку дороги, наклоняясь с образованием вертикального угла более или равного 2°, необходимо опустить опорное колесо 25 с одной стороны больше по сравнению с положением, в котором опорные колеса 25 полностью опущены на плоскую земную поверхность. Кроме того, если мотоцикл наклоняется в одну сторону с образованием вертикального угла более или равного 5°, из этого следует, что мотоцикл проходит участок дороги, который характеризуется значительным уклоном. Следовательно, в этом случае одно из опорных колес 25 опускают для взаимодействия с земной поверхностью, а опорное колесо 25 на противоположной стороне поднимают, чтобы удерживать мотоцикл как можно ближе к вертикальному положению.
Когда мотоцикл наклоняется вправо с образованием вертикального угла (угла наклона) от 2° до 5° и, следовательно, электродный стержень 43 входит в область R, электродвигатель 31 подъема и опускания опорных колес с правой стороны активируют при помощи переключателя (перекл.) в замкнутом состоянии, то есть в состоянии подачи электроэнергии, системы автоматического регулирования/поддержания вертикального положения и, следовательно, приводят в действие для установки вертикального угла в диапазоне от 0° до 1°. С другой стороны, электродвигатель 31 подъема и опускания опорных колес с левой стороны не приводят в действие и деактивируют при помощи перевода переключателя (перекл.) в разомкнутое состояние, то есть в состояние прерывания подачи электроэнергии. Таким образом, только опорное колесо 25 с правой стороны опускают для смещения угла наклона в левую сторону, чтобы поддержать вертикальное положение.
Когда мотоцикл наклоняется вправо с образованием вертикального угла (угла наклона) больше или равного 5° и, следовательно, электродный стержень 43 входит в область R-L, электродвигатель 31 подъема и опускания опорных колес с правой стороны активируют при помощи переключателя (перекл.) в замкнутом состоянии системы автоматического регулирования/поддержания вертикального положения и, следовательно, приводят в действие для установки вертикального угла в диапазоне от 0° до 1°. С другой стороны, вал электродвигателя 31 подъема и опускания опорных колес с левой стороны поворачивается против часовой стрелки (пр. чс), так что левое опорное колесо 25 поднимается для соответствия земной поверхности с левой и правой сторон мотоцикла. Вместе с этим, левое опорное колесо 25 поддерживается в подпружиненном состоянии, так как на него воздействует усилие натяжения пластинчатой пружины 19. При этом левый электродвигатель 31 подъема и опускания опорных колес активируют при помощи перевода переключателя (перекл.) в замкнутое состояние для вращения в направлении против часовой стрелки(пр. чс.) в состоянии подачи электроэнергии. Посредством этого левый электродвигатель 31 подъема и опускания опорных колес смещает угол наклона. В результате, когда угол наклона возвращается в область центральной электродной пластины 45, находясь при этом в диапазоне от 0° до 2°, система автоматического регулирования/поддержания вертикального положения осуществляет переключение для поворота вала электродвигателя в направлении по часовой стрелке(чс). При этом опорные колеса 25 приведены в непосредственное взаимодействие с земной поверхностью, и мотоцикл автоматически сохраняет вертикальное положение.
На фиг. 4В показаны левое и правое опорные колеса 25, выполненные с возможностью выдвижения и втягивания между положениями, обозначенными позициями 12 и 13, при помощи зубчатой рейки 11 и зубчатого колеса 10. Левое и правое опорные колеса 25 могут быть автоматически выдвинуты при помощи зубчатого колеса 10 и установленного на нем электродвигателя; альтернативно, выдвижение может быть осуществлено вручную путем отключения переключателя 56-1 выдвижения и переключателя 57-1 втягивания. Зубчатая рейка 11 включает в себя левую зубчатую рейку и правую зубчатую рейку. Левый конец правой зубчатой рейки 11 входит в зацепление с левым автоматическим опорным колесным устройством, и правый конец левой зубчатой рейки 11 входит в зацепление с правым автоматическим опорным колесным устройством. Следовательно, при вращении зубчатого колеса 10 левая и правая зубчатые рейки 11 одновременно приводятся в движение, чтобы увеличить или уменьшить существующее между их концами расстояние. При максимальном уменьшении расстояния между концами левой и правой зубчатых реек 11 левое и правое автоматические опорные колесные устройства располагаются внутри бокового отсека 252.
Движения вверх-вниз автоматического опорного колесного устройства являются достаточными, чтобы справиться с большинством обычных дорожных поверхностей. Однако, при движении или парковке мотоцикла на очень необычной земной поверхности, такой как грунтовые или горные дороги или дороги с непостоянными уклонами, безопасное расстояние между левым и правым опорными колесами 25 может быть дополнительно увеличено нажатием на единственную кнопку, чтобы обеспечить безопасный угол, который превышает нормальный безопасный угол. Таким образом, безопасный угол для предотвращения падения мотоцикла может быть обеспечен, даже если электродвигатели 31 подъема и опускания опорных колес вышли из строя.
Боковой отсек 252, расположенный ниже обоих боковых участков корпуса кабины, характеризуется наличием пространства, в котором могут быть расположены автоматические опорные колесные устройства. Боковой отсек 252 предусмотрен с левой и правой стороны мотоцикла и через него проходит линейная направляющая ЛН, которая выступает на большое расстояние в поперечном направлении. Линейная направляющая ЛН служит в качестве направляющей, которая позволяет автоматическим опорным колесным устройствам линейно перемещаться в направлении влево и вправо, когда автоматические опорные колесные устройства передвигаются влево и вправо в соответствии с движением зубчатых реек 11.
На фиг. 6 изображен механизм рычага опорного колеса, приводимый в действие при помощи пневматического цилиндра в соответствии с третьим вариантом осуществления настоящего изобретения.
Согласно описанному выше варианту осуществления рычаг 7 опорного колеса приводится в действие электродвигателем 31 подъема и опускания опорных колес, вал которого способен вращаться в прямом и обратном направлениях. Однако согласно второму варианту осуществления рычаг 7 опорного колеса приводится в действие при помощи цилиндра 240, в котором используют сжатый воздух из ресивера, служащего для хранения воздуха, или гидравлическую жидкость.
Цилиндрический привод функционирует за счет подачи сжатого воздуха или гидравлической жидкости из/в цилиндр 240 и, следовательно, требует наличия дополнительного оборудования. Для этого предусмотрены компрессор и воздушный ресивер, которые служат не только для подачи сжатого воздуха, но и для рекуперации энергии, которая может быть использована в различных целях, а также для упрощения механизма.
Согласно третьему варианту осуществления, когда мотоцикл наклоняется влево с образованием вертикального угла (угла наклона) в диапазоне от 2° до 5° и, следовательно, электродный стержень 43 входит в область L, приводят в действие электромагнитный пневмоклапан цилиндра, приводящего в движение левый рычаг 7 опорного колеса. Затем переключатель (перекл.) устанавливают в замкнутое состояние, то есть в состояние подачи электроэнергии, и, следовательно, происходит подача энергии для установки вертикального угла мотоцикла в диапазоне от 0° до 1°. В результате этого происходит выталкивание и опускание поршневого штока цилиндра 240, приводящего в движение левый рычаг 7 опорного колеса, для нажатия на пластинчатые пружины. С другой стороны, электромагнитный пневмоклапан цилиндра для приведения в движение правого рычага 7 опорного колеса не приводят в действие, и соответствующий переключатель (перекл.) установлен в разомкнутое состояние, то есть в состояние прерывания подачи электроэнергии. В результате чего только левое опорное колесо 25 опускают для смещения угла наклона вправо, чтобы поддержать вертикальное положение.
Когда мотоцикл наклоняется влево с образованием вертикального угла (угла наклона) больше или равного 5° и, следовательно, электродный стержень 43 входит в область L-R, электромагнитный пневмоклапан цилиндра для приведения в движение левого рычага 7 опорного колеса активируют и, следовательно, приводят в действие для установки вертикального угла в диапазоне от 0° до 1°. При этом электромагнитный пневмоклапан цилиндра для приведение в движение правого рычага 7 опорного колеса также активируют. В результате этого поршневой шток поднимают до тех пор, пока он не будет обнаружен дистанционным датчиком 36, и правое опорное колесо 25 поднимается под действием возвратной пружины. Вместе с этим, правое опорное колесо 25 поддерживается в подпружиненном состоянии, так как на него воздействует усилие натяжения пластинчатой пружины.
Когда электродный стержень 43 системы автомагического регулирования/поддержания вертикального положения возвращается в область центральной электродной пластины 45, находясь при этом в диапазоне от 0° до 2°, в соответствии с описанными выше операциями, система автоматического регулирования/поддержания вертикального положения переключается, чтобы приложить давление для выдвижения вперед штоков обоих цилиндров. В результате этого опорные колеса 25 приведены в непосредственное взаимодействие с земной поверхностью, и мотоцикл автоматически сохраняет вертикальное положение.
Когда мотоцикл наклоняется в правую сторону с образованием вертикального угла (угла наклона) в диапазоне от 2° до 5° и, следовательно, электродный стержень 43 входит в область R, приводят в действие электромагнитный пневмоклапан цилиндра, приводящего в движение правый рычаг 7 опорного колеса. Затем переключатель (перекл.) устанавливают в замкнутое состояние, то есть в состояние подачи электроэнергии, и, следовательно, происходит подача энергии для установки вертикального угла мотоцикла в диапазоне от 0° до 1°. В результате этого происходит выталкивание и опускание поршневого штока цилиндра 240, приводящего в движение правый рычаг 7 опорного колеса, для нажатия на пластинчатые пружины. С другой стороны, электромагнитный пневмоклапан цилиндра для приведения в движение левого рычага 7 опорного колеса не приводят в действие, и соответствующий переключатель (перекл.) установлен в разомкнутое состояние, то есть в состояние прерывания подачи электроэнергии. В результате чего только правое опорное колесо 25 опускают для смещения угла наклона вправо, чтобы поддержать вертикальное положение.
Когда мотоцикл наклоняется вправо с образованием вертикального угла (угла наклона) больше или равного 5° и, следовательно, электродный стержень 43 входит в область R-L, электромагнитный пневмоклапан цилиндра для приведения в движение правого рычага 7 опорного колеса активируют и, следовательно, приводят в действие для установки вертикального угла в диапазоне от 0° до 1°. При этом электромагнитный пневмоклапан цилиндра для приведения в движение левого рычага 7 опорного колеса также активируют. В результате этого поршневой шток поднимают до тех пор, пока он не будет обнаружен дистанционным датчиком 36, и левое опорное колесо 25 поднимается под действием возвратной пружины. Вместе с этим, левое опорное колесо 25 поддерживается в подпружиненном состоянии, так как на него воздействует усилие натяжения пластинчатой пружины 19.
Когда электродный стержень 43 системы автоматического регулирования/поддержания вертикального положения возвращается в область центральной электродной пластины 45, находясь при этом в диапазоне от 0° до 2°, в соответствии с описанными выше операциями, система автоматического регулирования/поддержания вертикального положения переключается, чтобы приложить давление для выдвижения вперед штоков обоих цилиндров. В результате этого опорные колеса 25 приведены в непосредственное взаимодействие с земной поверхностью, и мотоцикл автоматически сохраняет вертикальное положение.
Третий вариант осуществления отличается от второго варианта осуществления тем, что приведение в движение происходит не при помощи кулачка, а при помощи цилиндра в соответствии с конфигурацией автоматического опорного колесного устройства, при этом он содержит амортизирующее средство, состоящее из пластинчатых пружин и цилиндрической пружины, как и во втором варианте осуществления. Таким образом, описание указанного амортизирующего средства будет опущено.
Водитель, путешествующий по горным или спускающимся вниз дорогам, как правило, использует торможение двигателем для предотвращения износа тормозных колодок. Это не экономично, так как происходит потребление энергии при замедлении. Как показано на фиг. 7 В, когда трос 15 натягивается в результате нажатия на тормоз, опора 181 компрессора совершает поворотное движение, и поворотное колесо 29, соединенное с валом поворотного колеса, проходящим через опору 181 компрессора, вращается за счет трения о приводное колесо 180, которое соединено со шкивом 253 приводного вала заднего колеса и вращается совместно с ним. В результате этого также происходит вращение соединительного кулачка 179, который выполнен как одно целое с валом поворотного колеса, что вызывает возвратно-поступательное движение соединительного штока 248, связанного с соединительным кулачком 179 и выступающего перед компрессором. После этого поршень, соединенный с задним концом соединительного штока 248, сжимает воздух, поступающий в цилиндр через впускное отверстие 245, выполненное в заднем конце указанного цилиндра, при этом сжатый воздух выходит через выпускное отверстие 246, выполненное в заднем конце цилиндра.
С каждой из сторон соединительного кулачка 179 выступает вал. Один из валов представляет собой вал поворотного колеса и соединен с поворотным колесом 29, а другой вал установлен с возможностью вращения в отверстие на конце соединительного штока 248.
Выпускное отверстие 246 соединено с пневматическим шлангом, при этом поступающий по пневматическому шлангу сжатый воздух хранится в воздушном ресивере 175. Воздух, хранимый в воздушном ресивере, может быть использован в качестве сжатого воздуха, необходимого для приведения в действие механизма рычага опорного колеса, перемещаемого при помощи пневматического цилиндра в соответствии с третьим вариантом осуществления, и может быть использован для предоставления движущей силы для других устройств мотоцикла.
Операция натяжения троса 15 для того, чтобы вызвать взаимодействие между поворотным колесом 29 и приводным колесом 180, может быть осуществлена путем ручного приведения в действие рычага управления 13, изображенного на фиг. 5А, или путем нажатия на ножную педаль eb торможения, изображенную на фиг. 5В. при помощи ноги.
Когда компрессор используют для рекуперации энергии и постепенного замедления, ножная педаль eb торможения слегка нажата, гак что тормоз bk под ножной педалью eb торможения не опускается. При осуществления резкого торможения осуществляют сильное нажатие на ножную педаль eb торможения, так чтобы сработал тормоз bk под ножной педалью eb торможения.
Как показано на фиг. 7В, когда компрессор перемещают из положения 16 в положение 17 под воздействием натяжения троса 15 и, следовательно, поворотное колесо 29 приводят во взаимодействие с приводным колесом 180, получают вращательную движущую силу. Таким образом, энергия, полученная в результате замедления мотоцикла, используется для приведения в действие компрессора с последующим сжатием воздуха и сохранением воздуха в воздушном ресивере 175, изображенном на фиг. 1А, в результате чего сжатый воздух может быть использован при необходимости.
Как показано на фиг. 7А, другой соединительный кулачок 179, соединенный с соединительным штоком 248 и вращающийся совместно с перемещением соединительного штока 248, установлен снаружи соединительного штока. Центральный вал соединительного кулачка 179, установленного снаружи, может быть соединен с электродвигателем-генератором 14, установленным наиболее удаленно от центра и способным функционировать в качестве генератора, преобразовывая вращательное усилие в электроэнергию.
Когда электродвигатель-генератор 14 не используется в качестве генератора, вал генератора 14 автоматически вращается для обеспечения возвратно-поступательного движения соединительного штока 248 в случае падения давления. В результате этого происходит генерирование сжатого воздуха для поддержания давления в воздушном ресивере 175 в области заранее определенного значения или выше.
Когда транспортное средство перемещается по заснеженным дорогам или обледеневшим дорогам, мотоциклетные лыжи 380, изображенные на фиг. 1В, могут быть установлены, и опорные колеса 25 могут быть выдвинуты в левую и правую стороны, чтобы препятствовать скольжению, боковому падению или опрокидыванию движущегося по заснеженной или обледеневшей дороге мотоцикла, что является критичным для мотоцикла и его водителя. В результате этого может быть повышена безопасность езды.
Как показано на фиг. 4А, мотоциклетные лыжи 380 установлены на рычагах 7 опорных колес и расположены в пространстве между левым и правым опорными колесами 25 таким образом, чтобы находиться рядом с опорными колесами 25. Переключатель 68 опускания лыж, изображенный на фиг. 5А, может быть использован для опускания мотоциклетных лыж 380 на поверхность заснеженной дороги и обледеневшей дороги при скорости мотоцикла до 60 км/ч, чтобы препятствовать падению мотоцикла в левую или правую сторону.
Мотоциклетная лыжа 380 установлена в гнезде 381 для крепления лыжи, которое выполнено в форме квадратной трубы и которое расположено вертикально в областях левого и правого рычагов 7 опорных колес, которые не видны снаружи. Регулировочные отверстия, проходящие через гнездо 381 для крепления лыжи в направлении от передней к задней поверхности, выполнены с интервалами в передней и задней поверхностях гнезда 381 для крепления лыжи и расположены на некотором расстоянии друг от друга в вертикальном направлении.
Мотоциклетная лыжа 380 представляет собой плоское изделие в виде пластины, похожее по форме на обычную лыжу, удлиненную в продольном направлении. Передний и задний концевые участки мотоциклетной лыжи 380 выполнены изогнутыми вверх, и передняя часть верхней поверхности мотоциклетной лыжи 380 соединена с нижним концевым участком стойки лыжи. Мотоциклетная лыжа 380 и стойка лыжи шарнирно прикреплены друг к другу, чтобы поворачиваться вокруг горизонтально проходящего вала.
Верхний концевой участок стойки лыжи изогнут наружу в форме квадратной скобы с образованием вставного элемента, который является частью, проходящей параллельно стойке лыжи. Верхняя поверхность вставного элемента характеризуется наличием отверстия, и внутреннее пространство, сообщающееся с указанным отверстием, ограничено верхней поверхностью. Передняя и задняя поверхности вставного элемента снабжены множеством регулировочных отверстий 385, которые располагаются вертикально на некотором расстоянии друг от друга и сообщаются с внутренним пространством вставного элемента.
Эластичный закрепляемый рычаг 382, характеризующийся наличием открытого верхнего конца, который выполнен в форме концов пинцета и сужается при нажатии с обеих сторон, вставляют с возможностью извлечения в отверстие верхней поверхности вставного элемента. Каждая из передней и задней частей закрепляемого рычага 382 снабжена парой выступов. Таким образом, когда закрепляемый рычаг 382 расширяется и вставной элемент находится внутри гнезда 381 для крепления лыжи, выступы входят в регулировочные отверстия гнезда 381 для крепления лыжи и регулировочные отверстия вставного элемента, в результате чего происходит фиксация вставного элемента в отношении вертикального перемещения. Когда закрепляемый рычаг 382 сжимают и выступы выходят из регулировочных отверстий 385. вставной элемент может быть извлечен из гнезда 381 для крепления лыжи. Высота установки мотоциклетной лыжи 380 может регулироваться путем регулировки глубины вставки вставного элемента, при этом закрепляемый рычаг 382 находится в сжатом состоянии.
В обычных условиях мотоциклетную лыжу 380 предпочтительно устанавливают приблизительно на 2-3 мм ниже опорных колес, чтобы она достигала земной поверхности раньше опорных колес.
Таким образом, мотоциклетные лыжи 380 могут быть легко установлены и сняты при помощи закрепляемого рычага 382, который является недорогим и выполнен для простого крепления и высвобождения, характеризуясь при этом высокой прочностью. Дополнительно, вертикальное положение мотоциклетной лыжи 380 может быть отрегулировано в соответствии с количеством снега.
Поскольку мотоциклетная лыжа 380 поднимается и опускается вместе с поднятием и опусканием опорных колес 25, мотоциклетная лыжа 380 может быть легко поднята и опущена на дорожной поверхности, характеризующейся наличием локальных мерзлых участков. Таким образом, может быть предотвращено скольжение задних колес влево или вправо во время передвижения, и мотоциклетные лыжи могут быть быстро подняты в случае земной поверхности, которая не является скользкой, так что мотоцикл может двигаться с нормальной скоростью.
Если установлена кабина, мотоциклу требуется щетка стеклоочистителя для обеспечения видимости во время снега или дождя. Щетка стеклоочистителя должна характеризоваться небольшой шириной, чтобы соответствовать размерам мотоцикла.
Как показано на фиг. 5С, предусмотрен вал 361, проходящий в поперечном направлении, который выполнен с возможностью вращения в прямом и обратном направлениях при помощи приводящего в движение щетки электродвигателя 370, и оба конца вала 361 соединены с левой и правой щетками 350 и 351 стеклоочистителей, соответственно. Таким образом, щетки 350 и 351 стеклоочистителей, расположенные с обеих сторон, работают одновременно при помощи только одного приводящего в движение щетки электродвигателя 370 и редуктора 360, вместо двух электродвигателей. Кроме того, щетки характеризуются надлежащей конфигурацией для очистки внешней поверхности сферического ветрового стекла. Таким образом, во время движения в дождливую погоду водителю может быть обеспечен хороший обзор.
Специалистам в данной области техники будет понятно, что различные модификации и изменения могут быть внесены в настоящее изобретение без отступления от его сути и объема, раскрытых в прилагаемой формуле изобретения.
Реферат
Изобретение относится к области машиностроения, в частности к мотоциклам. Мотоцикл с автоматическим колесным опорным устройством содержит левый и правый рычаги опорных колес, левое и правое приводные устройства, датчик скорости, контроллер. Левый и правый рычаги опорных колес предусмотрены для вертикального перемещения левого и правого опорного колес и соединены с возможностью вращения с их нижними концевыми участками. Левое и правое приводные устройства приводят в движение левый и правый рычаги опорного колеса и осуществляют перемещение левого и правого рычагов опорного колеса в направлении вверх и вниз. Датчик скорости определяет скорость мотоцикла. Контроллер соединен с датчиком скорости, левым и правым приводными устройствами. Контроллер поднимает оба или одно из левого и правого опорных колес, когда скорость превышает заданную скорость. Контроллер опускает оба или одно из левого опорного колеса и правого опорного колеса, когда скорость становится равной заданной скорости или меньше. Достигается повышение безопасности. 15 з.п. ф-лы, 31 ил.
Комментарии