Устройство управления для транспортного средства - RU2389625C2
Код документа: RU2389625C2
Чертежи
















Описание
Текст описания приведен в факсимильном виде.


































































Реферат
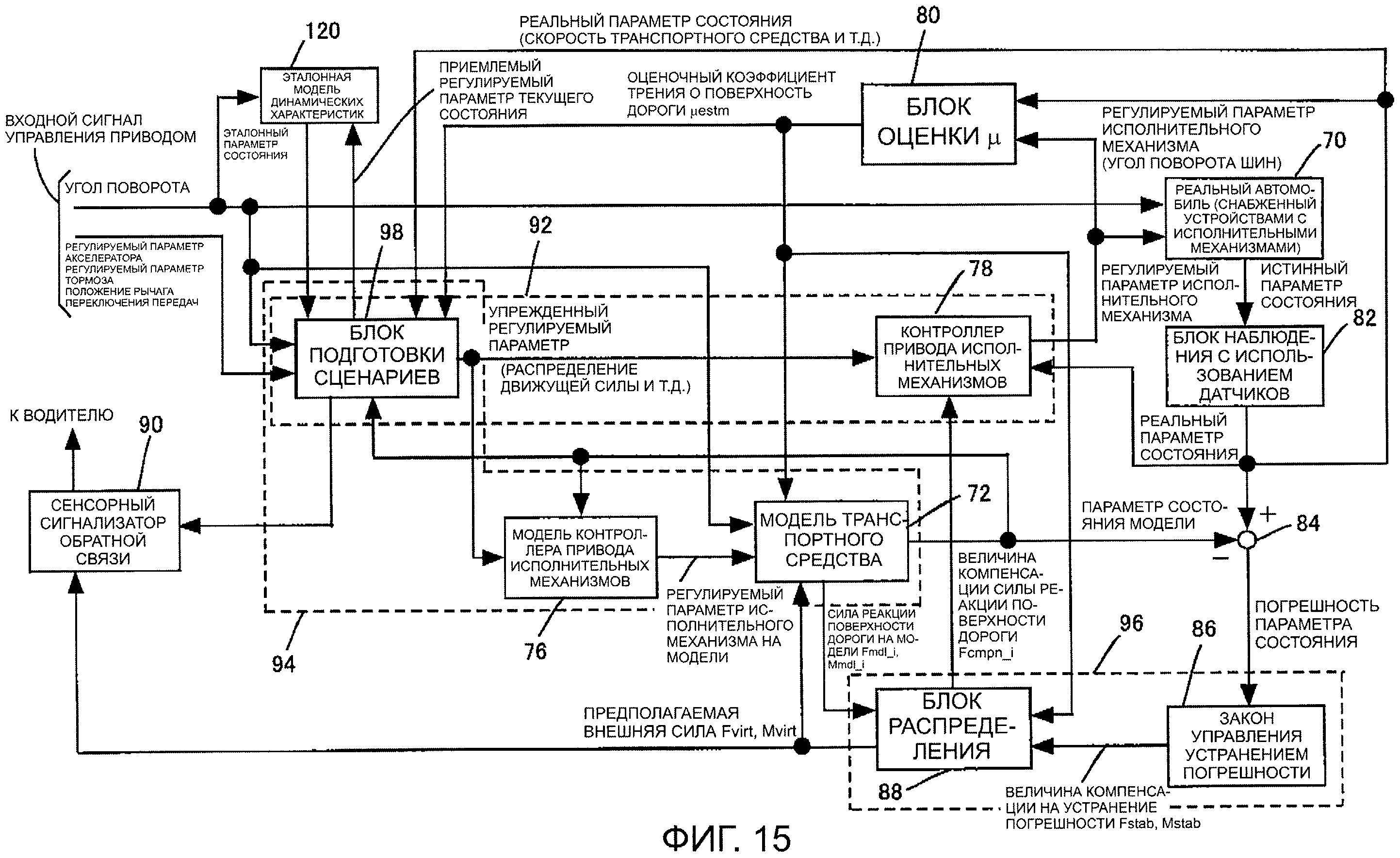
Изобретение относится к технике управления колесными транспортными средствами. Предложенное устройство снабжено средством определения движения модели транспортного средства для определения движения транспортного средства на модели транспортного средства, демонстрирующей динамические характеристики транспортного средства, на основе регулируемых параметров привода типа угла поворота, регулируемого водителем. Имеются также средство управления реакцией на погрешность параметра состояния с целью определения входных сигналов управления для средства управления исполнительным механизмом реального транспортного средства и средство определения движения модели транспортного средства согласно закону обратной связи на основе разности между параметром состояния движения модели транспортного средства и параметром состояния движения реального транспортного средства. На основе погрешности параметра состояния осуществляется управление не только движением реального транспортного средства, но и движением модели транспортного средства, что позволяет повысить устойчивость к нарушениям или изменениям режима работы при осуществлении управления работой исполнительного механизма, подходящего для режима работы реального транспортного средства в максимально возможной степени. 17 з.п. ф-лы, 24 ил.
Формула
средство выявления реального параметра состояния для измерения или оценки реального параметра состояния, являющегося определенным параметром состояния, связанным с реальным движением транспортного средства,
средство определения движения модели транспортного средства для определения движения модели транспортного средства, являющегося движением транспортного средства на первой модели транспортного средства, выражающей динамические характеристики транспортного средства, на основе, по меньшей мере, регулируемого параметра привода, и
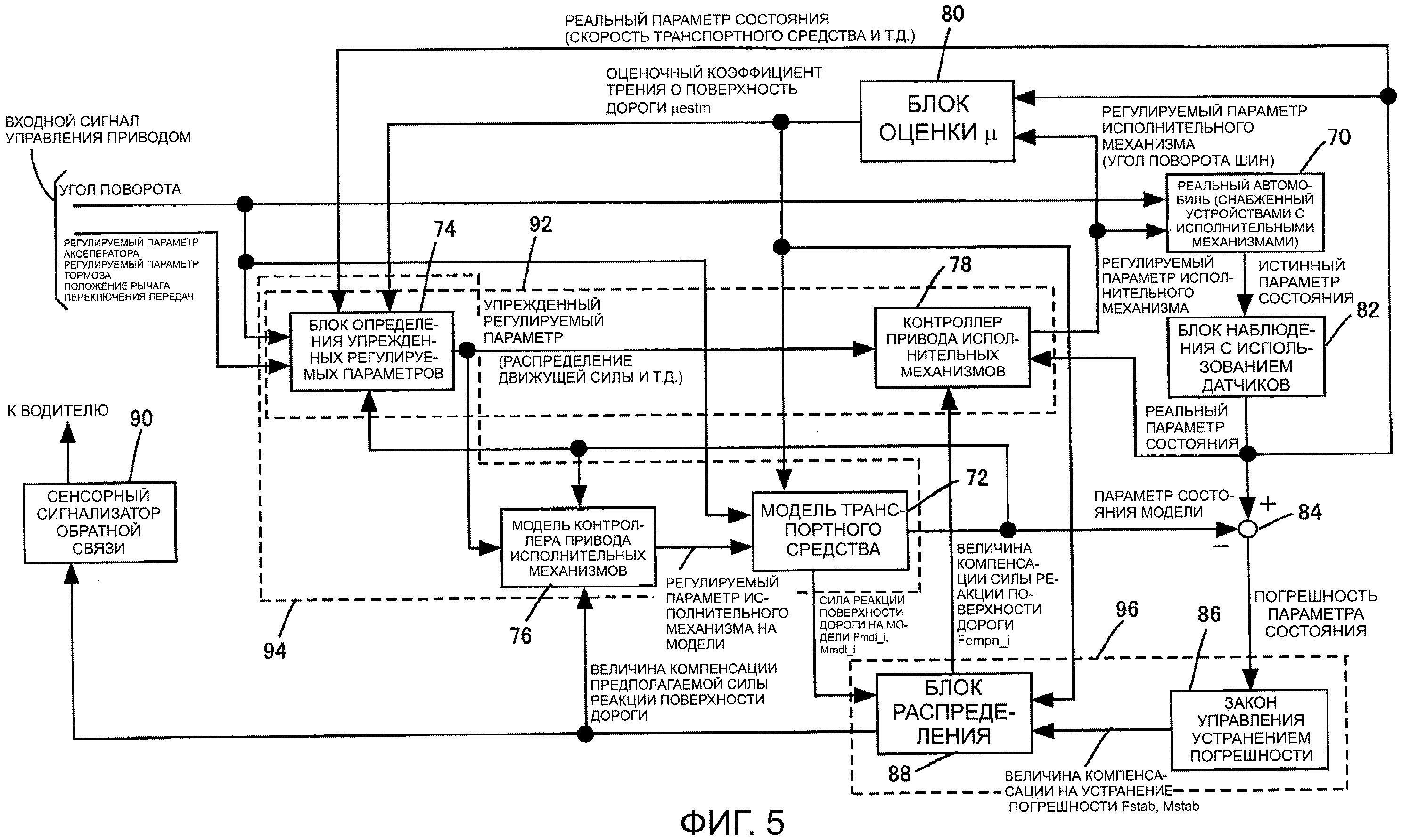
средство управления реакцией на погрешность параметра состояния для определения входного сигнала управления исполнительным механизмом реального транспортного средства для управления устройством исполнительного механизма реального транспортного средства и входного сигнала управления моделью транспортного средства для управления движением модели транспортного средства согласно закону управления с обратной связью на основе первой погрешности параметра состояния, являющейся разностью между реальным параметром состояния, полученным путем измерения или оценки, и параметром состояния модели, являющимся определенным параметром состояния, связанным с движением модели транспортного средства,
причем средство управления устройством исполнительного механизма содержит средство для управления устройством исполнительного механизма на основе, по меньшей мере, входного сигнала управления исполнительным механизмом реального транспортного средства, и
средство определения движения модели транспортного средства содержит средство для определения движения модели транспортного средства на основе, по меньшей мере, регулируемого параметра привода и входного сигнала управления моделью транспортного средства.
входной сигнал управления исполнительным механизмом реального транспортного средства содержит величину коррекции для коррекции основного входного сигнала управления реальным транспортным средством, и
средство управления устройством исполнительного механизма управляет устройством исполнительного механизма на основе входного сигнала управления, полученного путем коррекции требуемого основного входного сигнала управления реальным транспортным средством с помощью входного сигнала управления исполнительным механизмом реального транспортного средства.
входной сигнал управления исполнительным механизмом реального транспортного средства содержит параметр коррекции для коррекции основного целевого параметра силы реакции поверхности дороги, и
средство управления устройством исполнительного механизма управляет устройством исполнительного механизма на основе целевого значения силы реакции поверхности дороги, определяемой скорректированным параметром, полученным путем коррекции определенного основного целевого параметра силы реакции поверхности дороги с помощью параметра коррекции.
входной сигнал управления моделью транспортного средства содержит величину коррекции для коррекции основного входного сигнала управления моделью,
средство определения движения модели транспортного средства содержит средство для определения движения модели транспортного средства путем приведения в действие устройства исполнительного механизма на первой модели транспортного средства на основе регулируемого параметра, полученного путем коррекции требуемого основного входного сигнала управления моделью с помощью входного сигнала управления моделью транспортного средства, и
основной входной сигнал управления моделью совпадает с основным входным сигналом управления реальным транспортным средством.
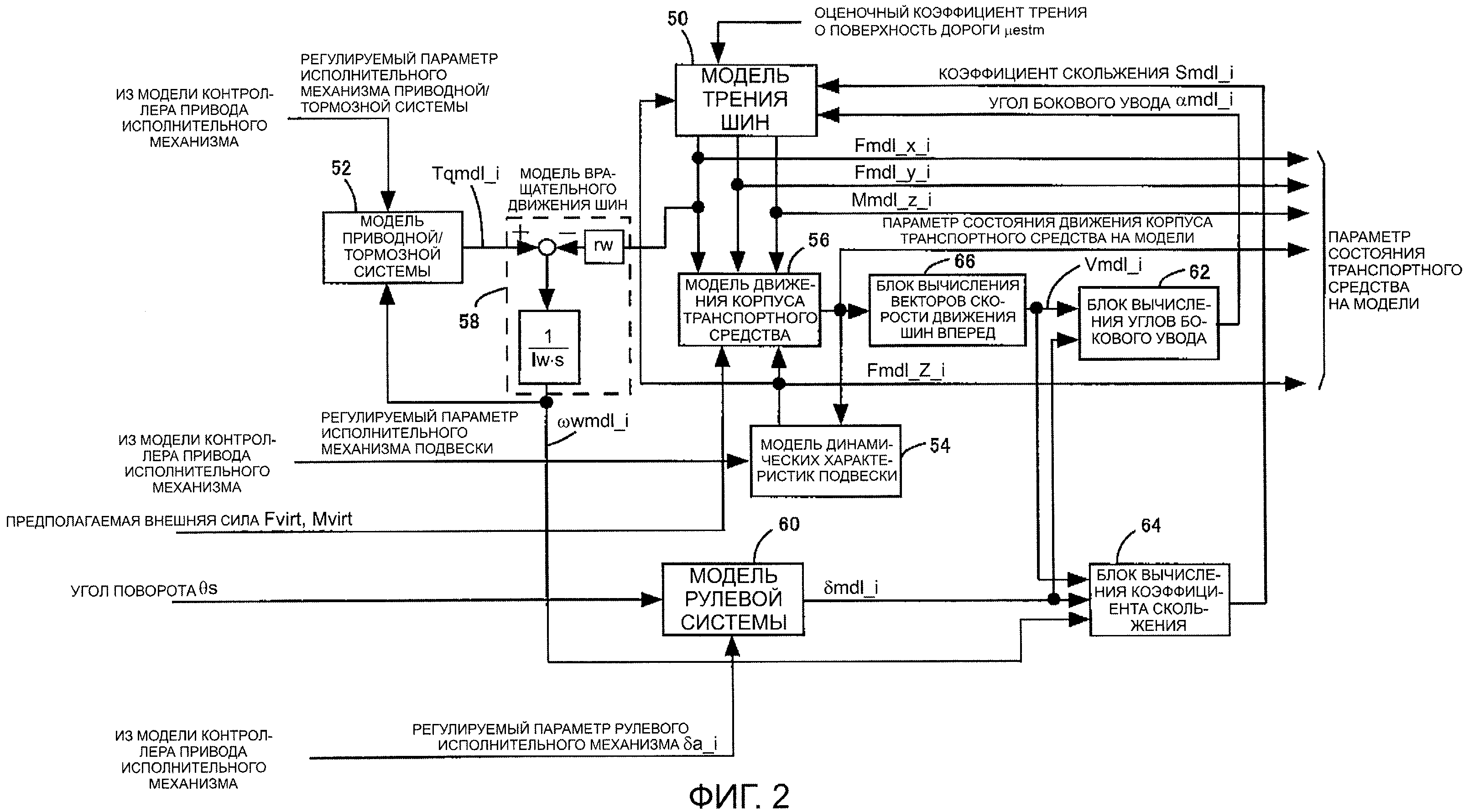
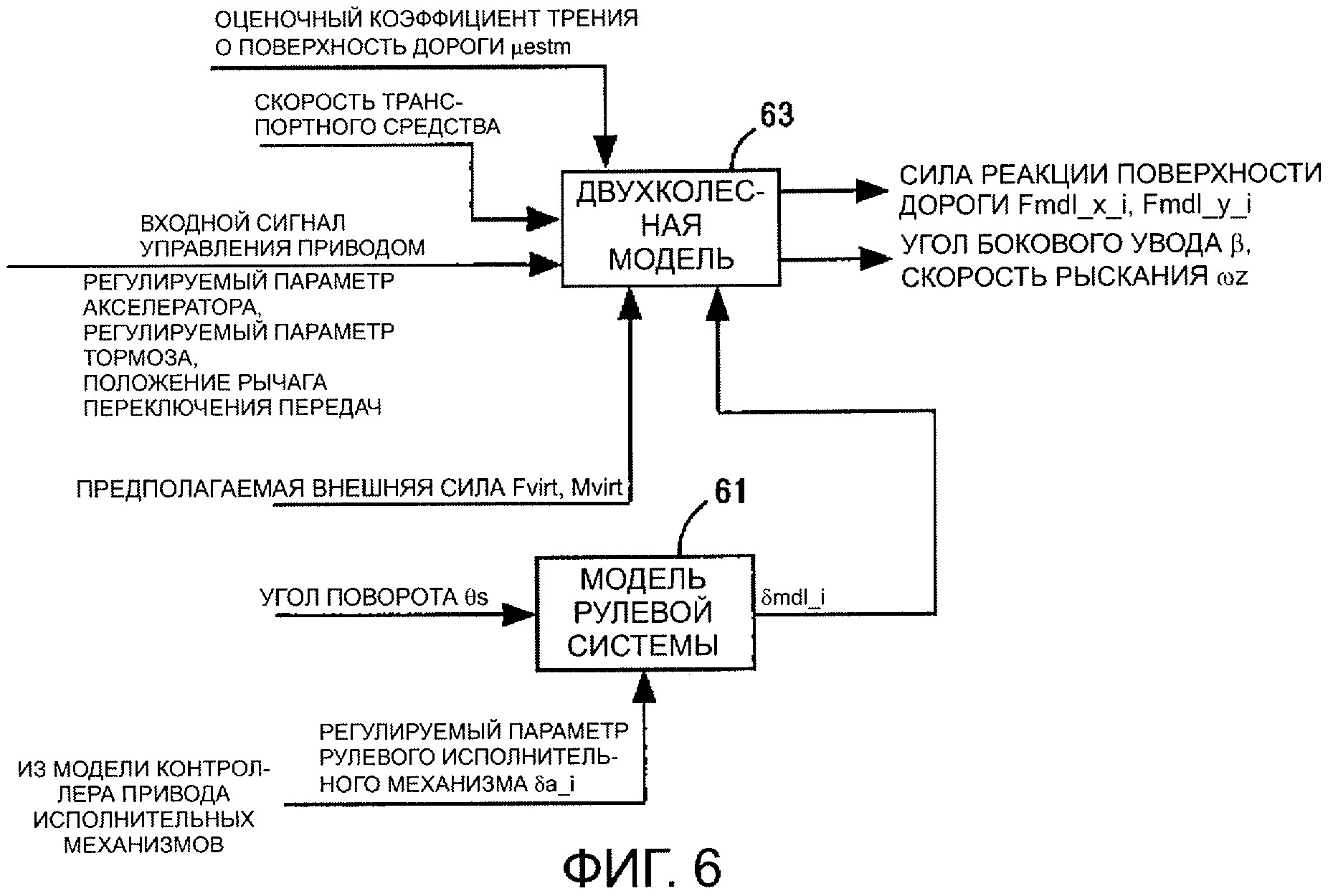
средство определения движения модели транспортного средства содержит средство для определения параметра силы реакции поверхности дороги на модели, определяющего силу реакции поверхности дороги, прикладываемую к транспортному средству на первой модели транспортного средства, на основе, по меньшей мере, регулируемого параметра привода, и средство для определения движения первой модели транспортного средства путем приложения, по меньшей мере, силы реакции поверхности дороги, определяемой с помощью требуемого параметра силы реакции поверхности дороги на модели, и предполагаемой внешней силы, являющейся входным сигналом управления моделью транспортного средства, к транспортному средству на первой модели транспортного средства, и
сила реакции поверхности дороги, определяемая с помощью параметра силы реакции поверхности дороги на модели, совпадает с основным целевым значением силы реакции поверхности дороги, определяемой с помощью основного целевого параметра силы реакции поверхности дороги.
основной целевой параметр силы реакции поверхности дороги содержит параметр, определяющий основное целевое значение силы реакции поверхности дороги, действующей на каждое колесо, и
допустимый диапазон содержит допустимый диапазон силы реакции поверхности дороги, действующей на каждое из колес.
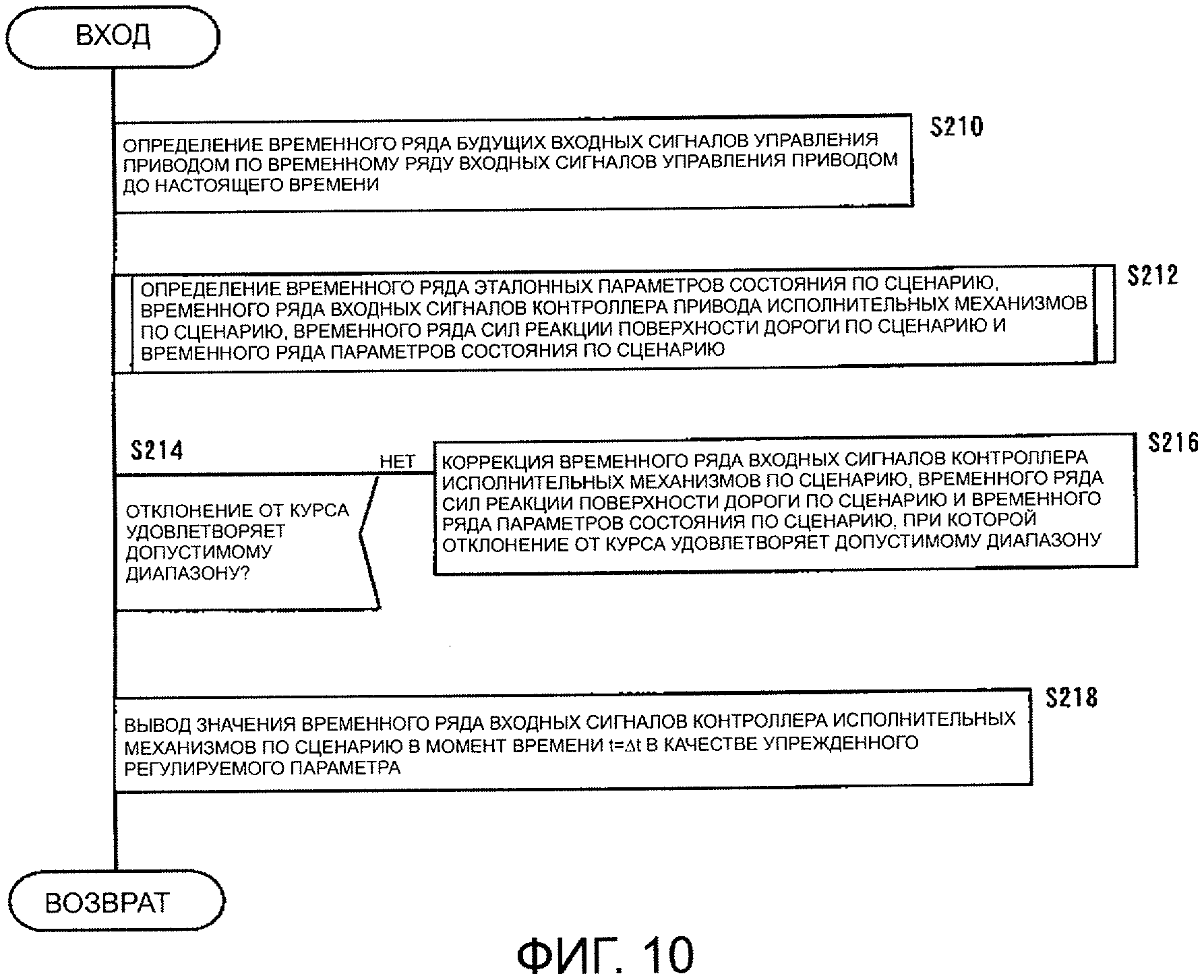
причем средство управления устройства исполнительного механизма определяет основной входной сигнал управления реальным транспортным средством на основе будущего режима работы первой модели транспортного средства.
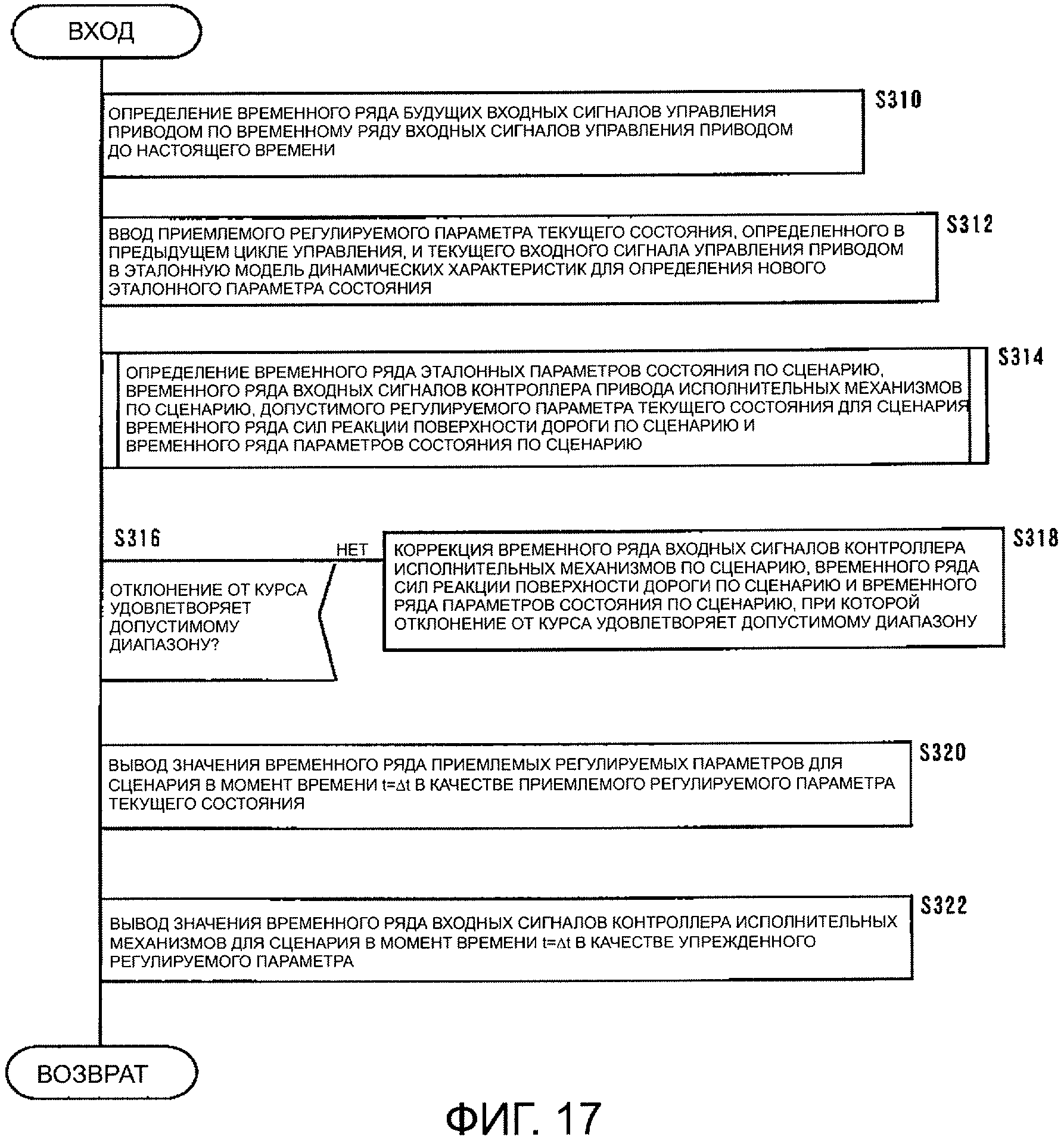
средство определения будущего регулируемого параметра привода для определения будущего регулируемого параметра привода, являющегося регулируемым параметром привода в течение определенного периода, включающего в себя период до истечения определенного времени от текущего момента времени, на основе, по меньшей мере, регулируемого параметра привода до текущего момента времени, и
средство прогнозирования будущего режима работы транспортного средства для прогнозирования будущих режимов работы первой модели транспортного средства и третьей модели транспортного средства при определении входного сигнала управления, являющегося входным сигналом управления, определяющим работу устройства исполнительного механизма на третьей модели транспортного средства на основе, по меньшей мере, разности между параметром состояния второй модели транспортного средства и параметром состояния третьей модели транспортного средства и будущего регулируемого параметра привода в каждый момент времени до истечения определенного времени от текущего момента времени при использовании самого последнего значения параметра состояния первой модели транспортного средства в качестве исходной точки параметра состояния второй модели транспортного средства, которая представляет динамические характеристики транспортного средства, и самого последнего значения реального параметра состояния транспортного средства в качестве исходной точки параметра состояния третьей модели транспортного средства, которая представляет динамические характеристики транспортного средства,
причем средство управления устройством исполнительного механизма определяет входной сигнал управления исполнительным механизмом реального транспортного средства на основе, по меньшей мере, будущего режима работы третьей модели транспортного средства.
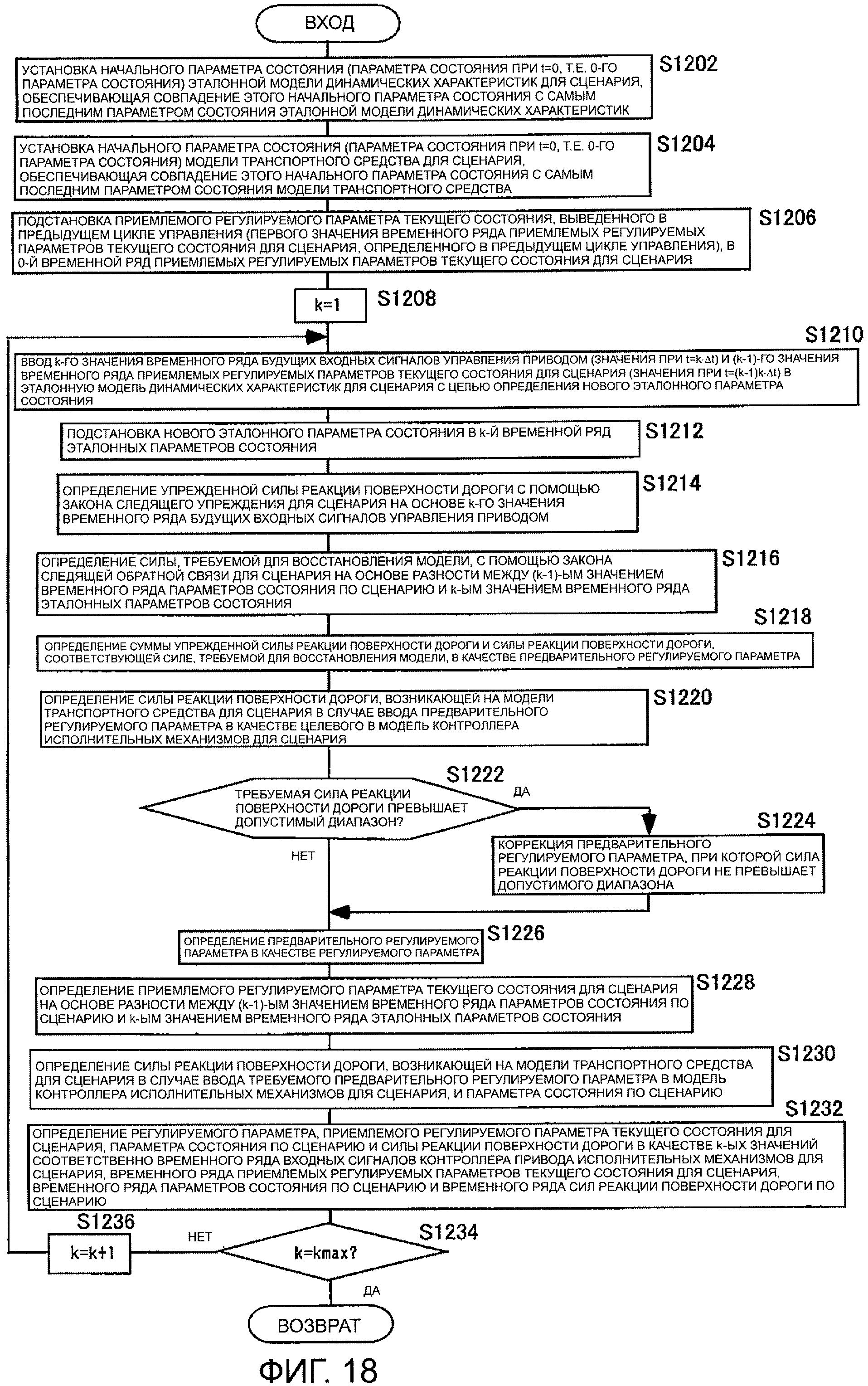
средство определения будущего регулируемого параметра привода для определения будущего регулируемого параметра привода, являющегося регулируемым параметром привода в течение определенного периода, включающего в себя период до истечения определенного времени от текущего момента времени, на основе, по меньшей мере, регулируемого параметра привода до текущего момента времени,
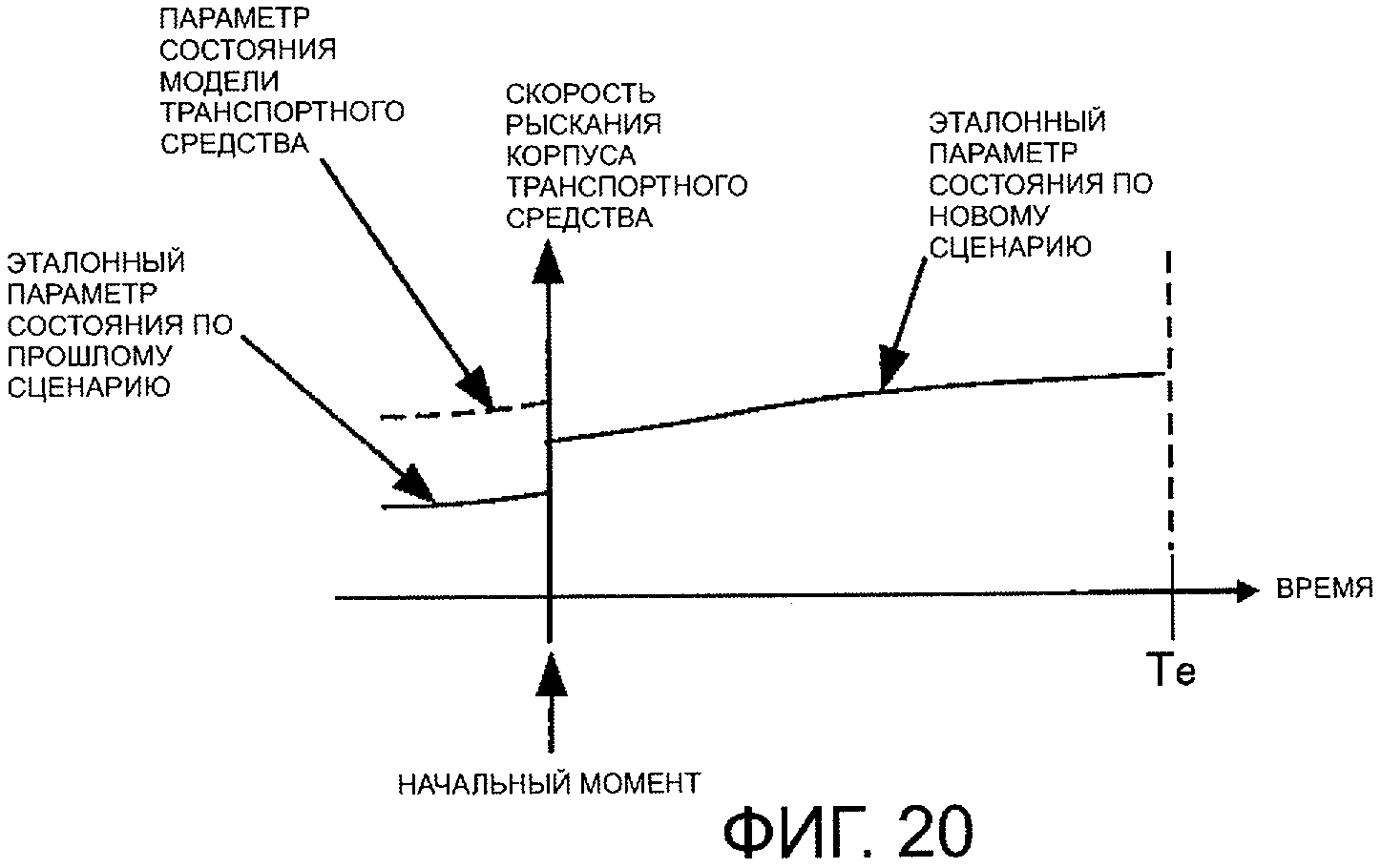
средство определения параметра состояния эталонного движения для последовательного определения параметра состояния эталонного движения, за которым первая модель транспортного средства должна следовать, с помощью эталонной модели динамических характеристик, представляющей динамические характеристики транспортного средства, на основе, по меньшей мере, регулируемого параметра привода, и
средство прогнозирования будущего режима работы транспортного средства для прогнозирования будущих режимов работы второй модели транспортного средства и третьей модели транспортного средства при определении входного сигнала управления моделью, являющегося входным сигналом управления, определяющим работу устройства исполнительного механизма на третьей модели транспортного средства, на основе, по меньшей мере, разности между параметром состояния второй модели транспортного средства и параметром состояния третьей модели транспортного средства и будущего регулируемого параметра привода в каждый момент времени до истечения определенного времени от текущего момента времени при использовании самого последнего значения параметра состояния эталонного движения в качестве исходной точки параметра состояния второй модели транспортного средства, которая представляет динамические характеристики транспортного средства, и самого последнего значения параметра состояния первой модели транспортного средства в качестве исходной точки параметра состояния третьей модели транспортного средства, которая представляет динамические характеристики транспортного средства,
причем средство управления устройством исполнительного механизма определяет основной входной сигнал управления реального транспортного средства на основе, по меньшей мере, будущего режима работы третьей модели транспортного средства.
средство определения эталонного движения для определения эталонного движения, являющегося эталонным движением по отношению к движению модели транспортного средства, на основе, по меньшей мере, регулируемого параметра привода, и
средство для определения величины компенсации на восстановление модели, являющейся внешней силой, прикладываемой к транспортному средству для приближения второй погрешности параметра состояния, являющейся разностью между определенным вторым параметром состояния, связанным с установленным эталонным движением, и определенным вторым параметром состояния, связанным с установленным движением первой модели транспортного средства, к 0, на основе второй погрешности параметра состояния,
причем средство для определения основного целевого параметра силы реакции поверхности дороги определяет основной целевой параметр силы реакции поверхности дороги на основе, по меньшей мере, величины компенсации на восстановление модели.
причем средство для определения основного входного сигнала управления моделью определяет основной входной сигнал управления моделью на основе, по меньшей мере, второй погрешности параметра состояния, являющейся разностью между определенным вторым параметром состояния, связанным с установленным эталонным движением, и определенным вторым параметром состояния, связанным с установленным движением первой модели транспортного средства, обеспечивающий приближение этой разности к 0.
Комментарии